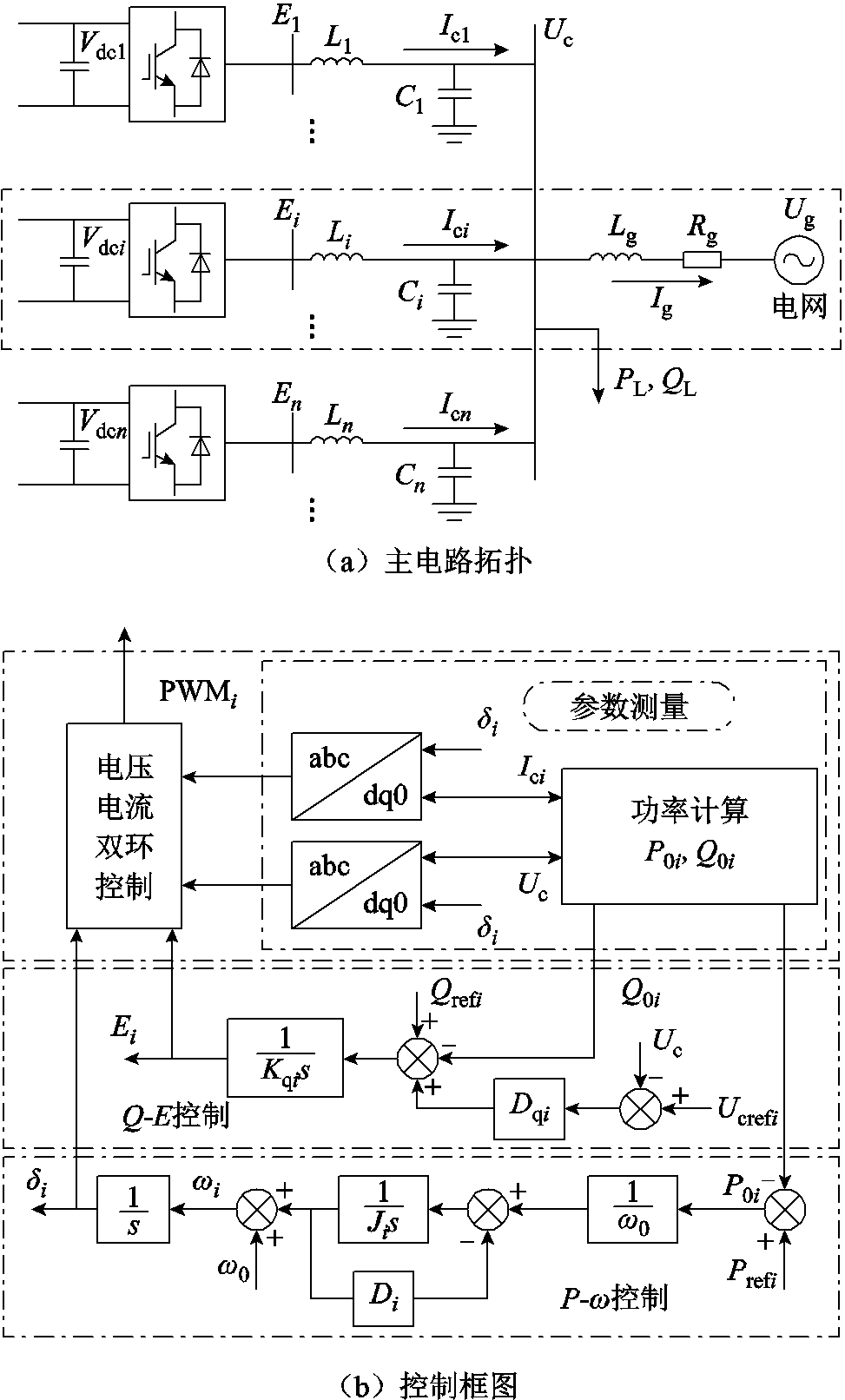
图1 储能VSC并联系统主电路与控制框图
Fig.1 Topology and control block diagram of energy storage paralleled VSC system
摘要 主动支撑型储能系统多机并联运行可共同支撑并网点电压。然而在电网电压跌落等运行环境快速变化情况下,多台机组并联运行的储能变流器(VSC)受参数差异影响,暂态失稳风险会明显增加。该文首先基于储能VSC多机并联模型,采用相量法分析电网电压跌落故障下储能系统动态响应机理;其次,结合暂态分析理论构建功角曲线解析储能VSC并联系统暂态交互影响,并通过相平面法确定关键参数对并联系统暂态稳定和电压支撑能力的影响,以及二者之间的耦合关系;然后,在此基础上提出基于改进功率环联合调节的储能VSC多机并联暂态电压支撑提升优化控制,通过调节暂态过程中储能VSC的无功调压系数改善电压支撑能力;最后,通过仿真和实验验证了理论分析的正确性及联合调节方法的有效性。
关键词:VSC多机并联 电压支撑 相平面法 暂态耦合 改进功率环联合调节
以电力电子变流器为并网接口的新能源发电装机占比逐年增长,导致电力系统的暂态失稳风险不断增大[1]。作为重要的调节资源,跟网型(Grid-Following, GFL)储能的无功调压能力很难满足电网暂态电压支撑的需求[2-3]。而储能电压源型变流器(Voltage Source Converter, VSC)采用主动支撑控制,则可以显著提升储能系统的电压支撑能力,是保证新能源高占比电力系统安全稳定运行的关键[4]。
主动支撑型储能VSC借鉴同步发电机的运行机理,可在电网电压跌落故障下迅速提供无功支撑[5]。然而储能VSC在支撑过程中也面临着与同步机类似的暂态稳定问题[6]。为保证储能系统的支撑能力,工程中通常采用储能VSC多机并联方式提升系统的有功出力[7-8],而并联VSC机组间的参数差异,在暂态情况下会影响储能系统的电压支撑能力和暂态稳定性[5-9],严重时甚至会造成暂态失稳。
在VSC的电压支撑特性方面,研究主要集中于无功环控制策略[10]。文献[11]将无功控制环结构类比于有功环结构,以等效无功弹性的方式将VSC的电压支撑能力表征为VSC的惯量对频率动态支撑作用,反映VSC的电压支撑能力。文献[12]采用动态无功电流注入法调整有功/无功指令值,在电网电压跌落故障期间提供电压支撑。文献[13]通过构建拉格朗日函数确定VSC有功和无功输出比例,以达到最佳电压支撑效果。文献[14]通过动态调整VSC无功调压系数提升VSC的暂态电压支撑能力。文献[11-14]均分析了VSC的电压支撑特性,但未能明确VSC的电压支撑能力与暂态稳定性之间的关系。
在VSC暂态稳定性研究方面,文献[15-16]表明了输入和输出有功功率平衡是保证VSC在电网电压跌落故障期间暂态稳定运行的关键,而平衡点的存在则是VSC暂态稳定前提。文献[16]通过准稳态模型分析了影响暂态工况下VSC平衡点存在的主要因素。文献[17]采用幅相运动方程建模方法建立了VSC物理化暂态模型,分析了VSC在暂态响应过程中的电压幅值、相位运动特性,以表征VSC暂态有功输出特性。文献[18-19]分别基于VSC单机系统和多VSC并联系统的李亚普洛夫函数分析系统暂态稳定裕度和关键影响参数。此外,基于数值解析的相平面法、逆轨迹法以及等面积法都是分析VSC暂态稳定性的有效方法[20-22],均可以刻画VSC的暂态特性,探索控制参数对暂态稳定性的影响。
基于暂态稳定分析理论,文献[23]建立了VSC多机暂态交互模型,并分析了暂态同步稳定的影响因素。为提升VSC多机并联系统的暂态稳定性,文献[24-25]通过数值解析的方法,求解VSC电压跌落故障下的稳定性运行参数,并提出了VSC低电压穿越方法。文献[5,26]建立了VSC并联模型,分别采用相平面法和李亚普洛夫函数法定量分析了VSC并联系统暂态稳定性;文献[27]分析注入无功电流变化对VSC并联系统的暂态稳定性的影响规律,提出了一种无功电流注入方法以提高设备的电压支撑能力和暂态同步稳定性。因控制结构差异,文献[5,26-27]中的建模分析方法很难直接应用于主动支撑型储能VSC并联系统中。文献[28-29]分析了暂态电压跌落故障下,孤岛VSC双机并联系统的交互影响特性,然而该双机模型中的一台机组等效为电网,本质上依然为单机系统[19]。文献[30]根据同步电机数学模型设计李亚普洛夫函数分析多VSC并联模型,并刻画了VSC多机并联模型的稳定域。文献[31]揭示了并联VSC间的暂态交互能量的功角牵引机制,并利用逆轨迹法分析了关键参数对并联系统暂态过程的影响规律。然而文献[27-31]只关注多VSC并联系统的暂态稳定问题,忽略了电网电压跌落工况下VSC的电压支撑能力。
综上所述,需要进一步研究主动支撑型储能VSC多机并联系统暂态稳定性与电压协同支撑问题。为此,本文首先基于暂态过程中VSC并联系统的功角变化及无功电压控制相量图,分析了并联系统内电动势和输出电压暂态响应特性;其次,结合等面积法则研究了暂态能量交互影响对并联VSC机组的稳定性作用机理,并建立了并联系统暂态交互模型,分析控制环参数对并联系统暂态稳定性和电压支撑能力的影响;最后,提出了基于改进功率环联合调节的主动支撑型储能VSC暂态电压优化控制,通过仿真和实验验证了理论分析和控制方法的正确性和可行性。
储能VSC并联系统拓扑如图1所示。Li、Ci分别为储能VSCi滤波电感和电容,i=1,2,···,n;Vdci为储能系统直流侧电压;Ei、Ici分别为储能VSCi内电动势和输出电流;Uc为并网点电压;并联系统经线路阻抗Lg和Rg与电网相连;Ig为线路电流;Ug为电网电压;PL、QL分别为储能VSC并联系统总有功功率和无功功率。
图1 储能VSC并联系统主电路与控制框图
Fig.1 Topology and control block diagram of energy storage paralleled VSC system
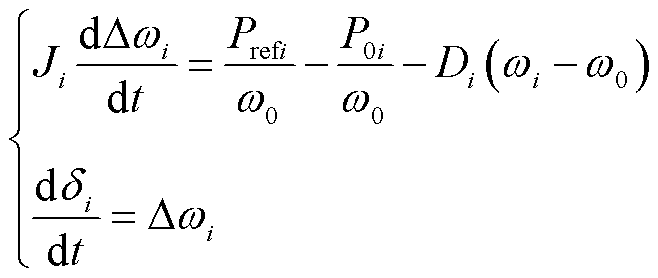
储能VSCi控制主要包含两部分:式(1)的储能VSCi有功-频率控制,模拟同步机的惯量阻尼特性;式(2)的无功-电压控制,模拟同步机励磁特性调节电压。
 (1)
(1)
式中,Prefi为有功功率参考值;P0i为储能VSCi的输出有功功率;Ji、Di分别为虚拟惯量和虚拟阻尼;δi、ωi、ω0和Δωi分别为储能VSCi输出电压相位、角频率、额定频率以及两者之差。
 (2)
(2)
式中,Kqi为积分系数;Qrefi为无功功率参考值;Q0i为储能VSCi输出无功功率;Dqi为无功调压系数;Ucrefi为第i个并联VSC输出电压参考值。
以两台机组为例,分析短路故障后电网电压跌落情况下并联系统暂态电压支撑的特性,等效电路如图2所示。
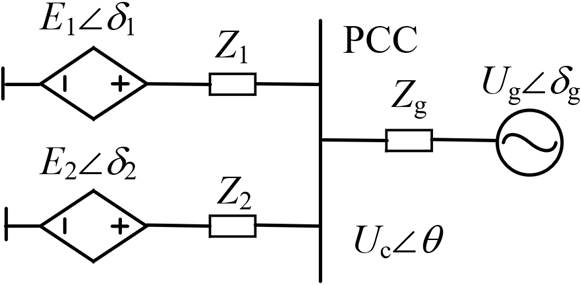
图2 VSC并联系统等效电路
Fig.2 Equivalent circuit for paralleled VSC system
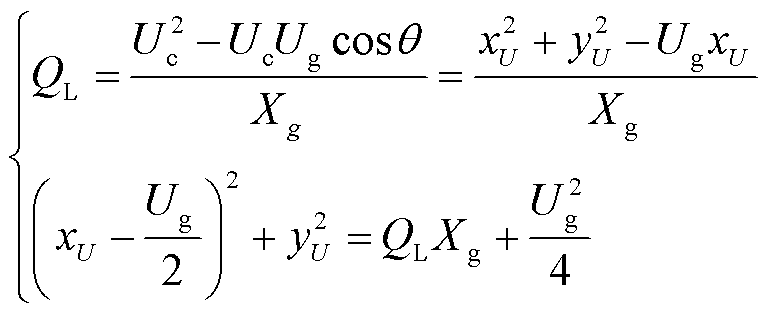
以电网电压Ug为基准轴x,即dg为0;并网点电压Uc的末端坐标为(xU, yU),由图2可得并联系统输出无功和坐标表达式。
 (3)
(3)
根据式(3)可以建立QL-Uc曲线,其等值线是以OC中点为圆心,半径为(QLXg+ /4)1/2的圆,VSC1和VSC2各电压相量间关系如图3所示,线路阻抗Zg=jXg、Z1=jX1、Z2=jX2。
/4)1/2的圆,VSC1和VSC2各电压相量间关系如图3所示,线路阻抗Zg=jXg、Z1=jX1、Z2=jX2。
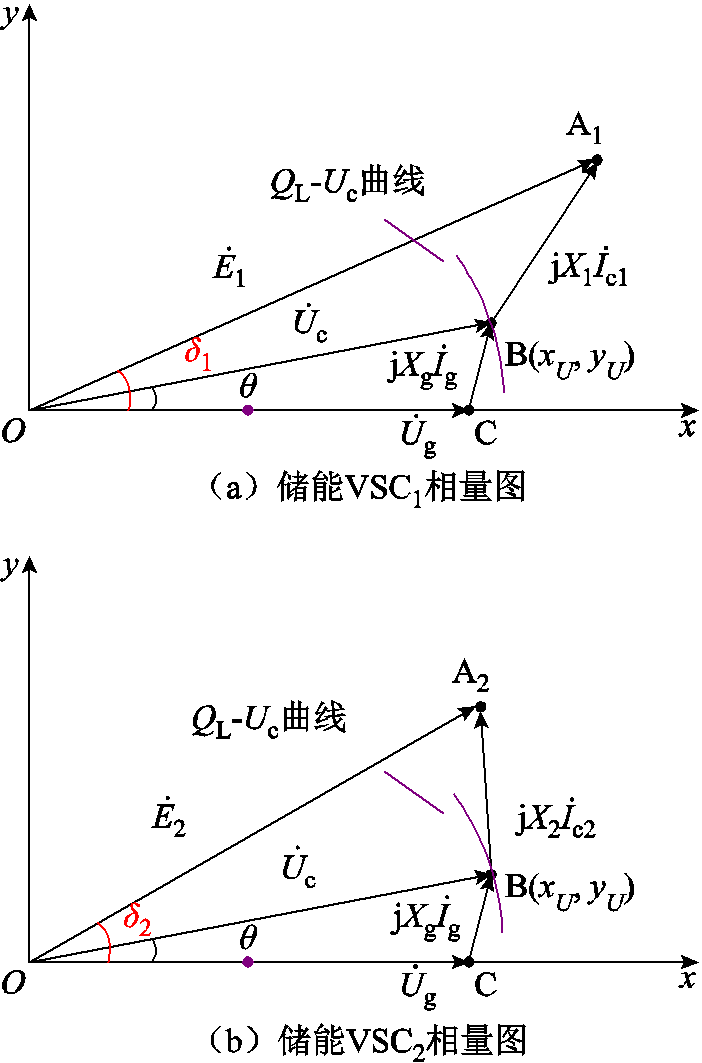
图3 VSC并联系统相量分析图
Fig.3 Phasor analysis diagram for paralleled VSC system
电网电压跌落相量图如图4所示。当电网电压Ug跌落至UgF时,故障瞬间,Uc的相角θ不突变,此时Uc运行在B1点,由于有功功率参考值Prefi不变,若系统稳定,则功率控制环会调整P0i至Prefi。由QL-UcF运行曲线可知,B1点在QL-UcF运行曲线内部,此时KqidEi/dt>0,内电势Ei会迅速增加至 ,UcF最终运行在B2点。
,UcF最终运行在B2点。
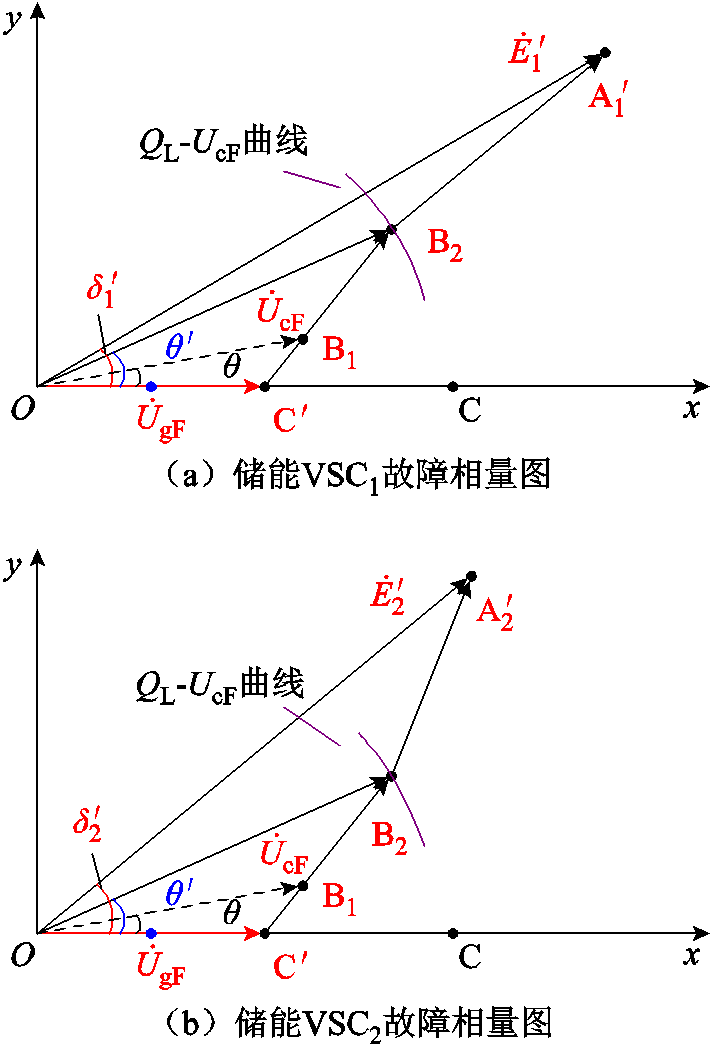
图4 电网电压跌落相量图
Fig.4 Phasor analysis diagram when low voltage fault occurs in power grid
 对图2进行 -△变换,分析并联系统各机组间暂态交互影响特性,变换后的等效电路如图5所示。图5中的Z1g、Z2g、Z12分别为VSC1与电网间、VSC2与电网间、VSC1与VSC2间的变换阻抗。图5
对图2进行 -△变换,分析并联系统各机组间暂态交互影响特性,变换后的等效电路如图5所示。图5中的Z1g、Z2g、Z12分别为VSC1与电网间、VSC2与电网间、VSC1与VSC2间的变换阻抗。图5 -△变换后的并联系统可以理解为三机交互系统,任意一台机组、包括网侧电源均存在与其他机组的交互影响。
-△变换后的并联系统可以理解为三机交互系统,任意一台机组、包括网侧电源均存在与其他机组的交互影响。
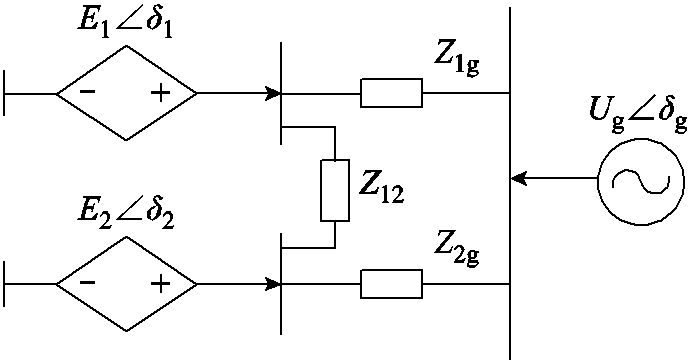
图5 -△变换后的等效电路
Fig.5 Equivalent circuit after star-triangle transformation
根据线路阻抗可知,Z1g=jX1g、Z2g=jX2g、Z12=jX12,其中X1g、X2g、X12是经星-三角变换后的各机组电源间的等效阻抗。则根据图5可得系统的节点电压方程。
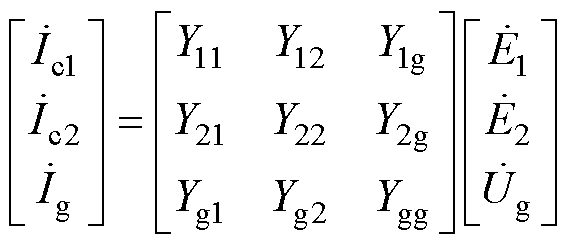 (4)
(4)
式中,Yii为各机组电源的自导纳;Yij为各机组间的互导纳;Yig、Ygi为电网电源与储能VSCi的互导纳;Ygg为电网电源的自导纳。以Ug为基准相量,即dg为0。
由式(4)可求得VSC1和VSC2的输出有功功率为
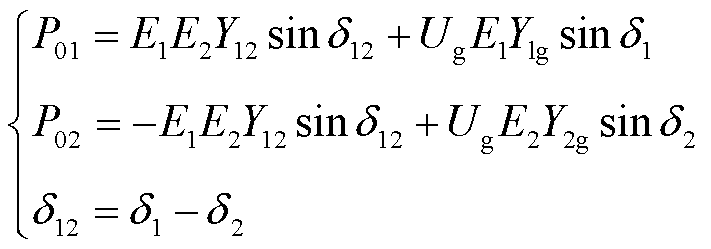 (5)
(5)
式中,d12为稳态运行下储能VSC1与储能VSC2的相位差。
在电网电压跌落故障下,由于Prefi>P0i,由式(1)可知,VSC的有功-频率控制方程是一阶特性,输出ωi增加,di增大至dc时,故障清除;根据等面积法则可得储能VSC1的加减速面积如式(6)所示。
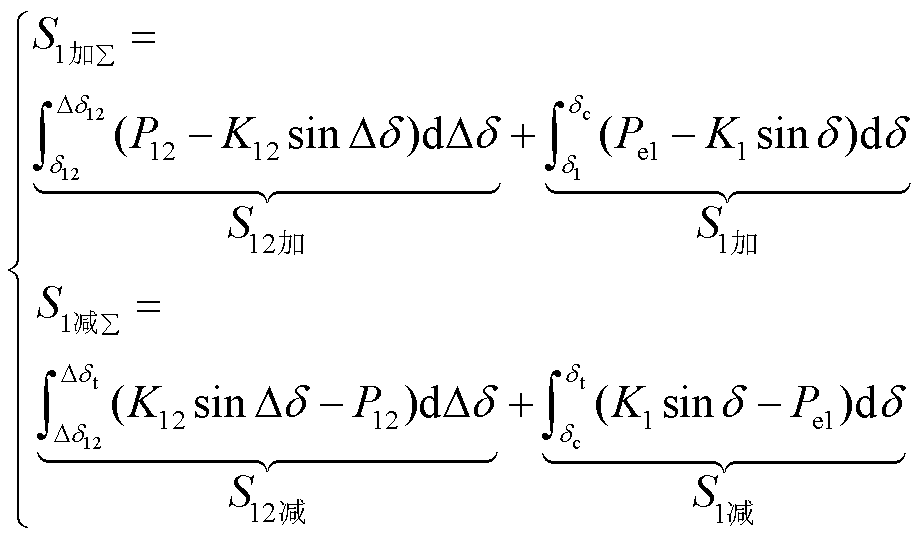 (6)
(6)
式中,K12=E1E2Y12;K1=UgE1Y1g; 、
、 分别为VSC1的加速、减速面积;P12为故障前并联系统VSC1流向VSC2的有功功率,P12=K12sind12;Pe1为故障前VSC1受d1影响的功率值,Pe1=K12sind1;P12+Pe1=Pref1;Δd12、Δdt分别为故障清除时和故障清除后t时刻VSC1与VSC2的相位差。
分别为VSC1的加速、减速面积;P12为故障前并联系统VSC1流向VSC2的有功功率,P12=K12sind12;Pe1为故障前VSC1受d1影响的功率值,Pe1=K12sind1;P12+Pe1=Pref1;Δd12、Δdt分别为故障清除时和故障清除后t时刻VSC1与VSC2的相位差。
同理可得VSC2的加减速面积,其并联系统的功角曲线如图6所示,SEPi和UEPi分别表示稳定点和不稳定点。
在电网电压跌落故障过程中:若d12≈Δd12,由式(6)可知S12加=0,结合图6a可知此时= ;说明并联VSC机组间在暂态过程中不存在暂态功率交互,各机组的加减速面积只受各自的di影响;此时各机组的加速面积等于Si加。根据式(6)和图6可知:若d2>d1,则P12<0;在暂态过程中,d2增加量均大于d1,此时
;说明并联VSC机组间在暂态过程中不存在暂态功率交互,各机组的加减速面积只受各自的di影响;此时各机组的加速面积等于Si加。根据式(6)和图6可知:若d2>d1,则P12<0;在暂态过程中,d2增加量均大于d1,此时 ;故障切除时,|Δd12|达到最大值,此时
;故障切除时,|Δd12|达到最大值,此时 。以上分析表明,在暂态交互功率的作用下,VSC1的加速面积增大,减速面积减小,暂态稳定性降低。同理,由图6b可知,受暂态功率交互影响VSC2的加速面积减小,减速面积增大,暂态稳定性增强。
。以上分析表明,在暂态交互功率的作用下,VSC1的加速面积增大,减速面积减小,暂态稳定性降低。同理,由图6b可知,受暂态功率交互影响VSC2的加速面积减小,减速面积增大,暂态稳定性增强。
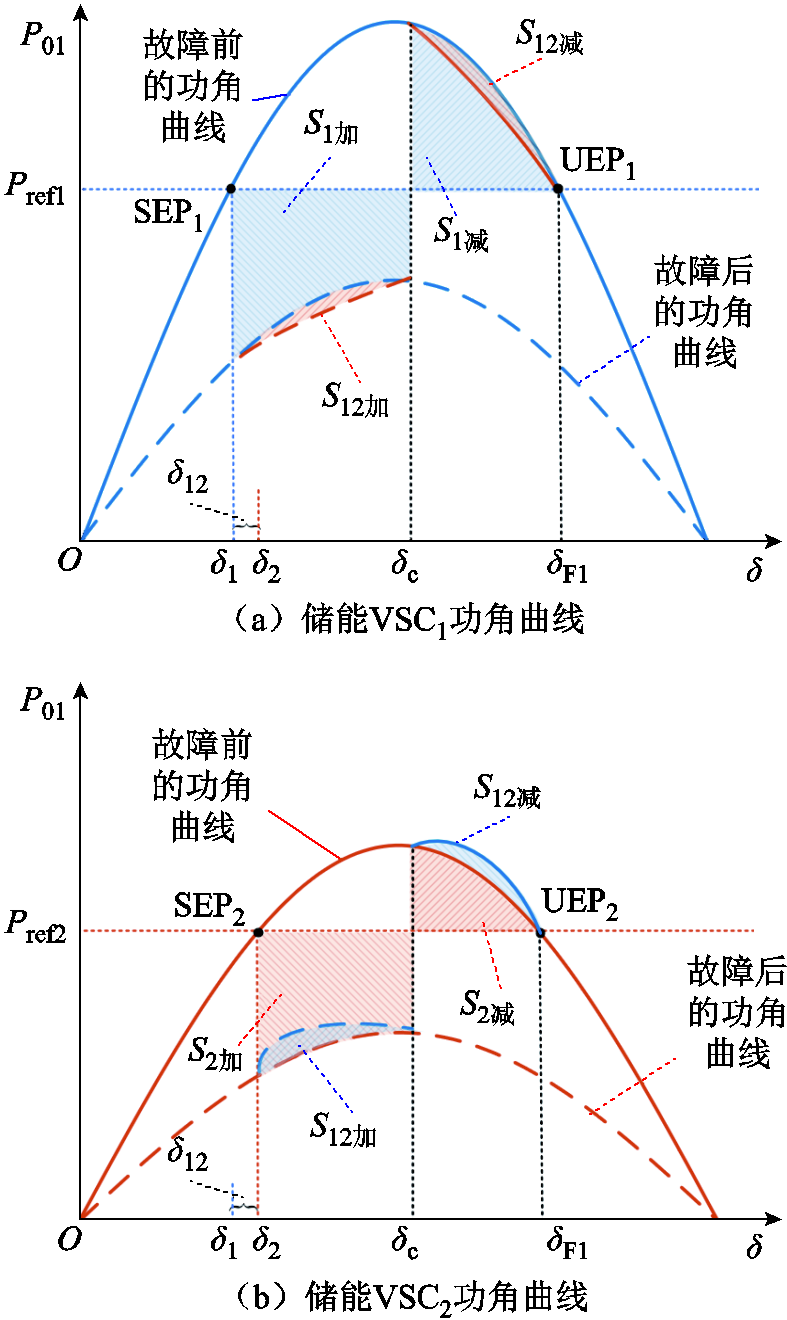
图6 VSC并联系统暂态交互下的功角曲线
Fig.6 Power angle curve of paralleled VSC system under transient interaction
综上可知,并联系统中各机组间暂态功率交互会影响每个机组的稳定性。在暂态过程中,Δd12<d12,VSC2的d2增加量明显更大。此时VSC2向VSC1提供暂态能量,提高了自身的稳定性,但降低了VSC1的稳定性;同理,若在暂态过程中,若d1>d2,Δd12>d12,此时P12>0,VSC1向VSC2提供暂态能量,提高了VSC1的稳定性,同时降低了稳定性更好的VSC2的稳定性,两者之间的稳定性趋于一致,使并联系统整体达到稳定点。
根据1.3节可知,暂态过程中各VSC的功角增加,存在暂态交互影响,也影响并联系统的暂态稳定性。由式(1)得两台并联VSC关于相位差的有功控制环方程为
 (7)
(7)
由式(4)可得储能VSC1和储能VSC2的输出无功功率为
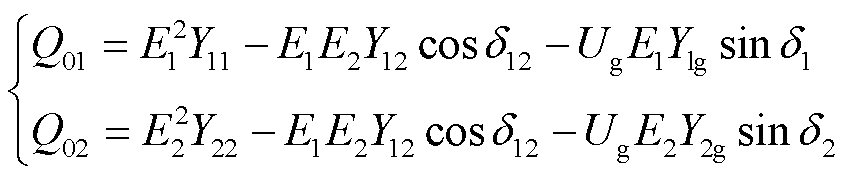 (8)
(8)
联立式(1)、式(2)、式(5)、式(7)和式(8),可知双机并联VSC的二阶微分非线性方程存在d1、d2、E1、E2四个耦合参数。无功控制回路快速稳定,内电动势E在式(2)中的导数方程可以转换为准稳态方程[18],并联系统耦合关系如图7所示。
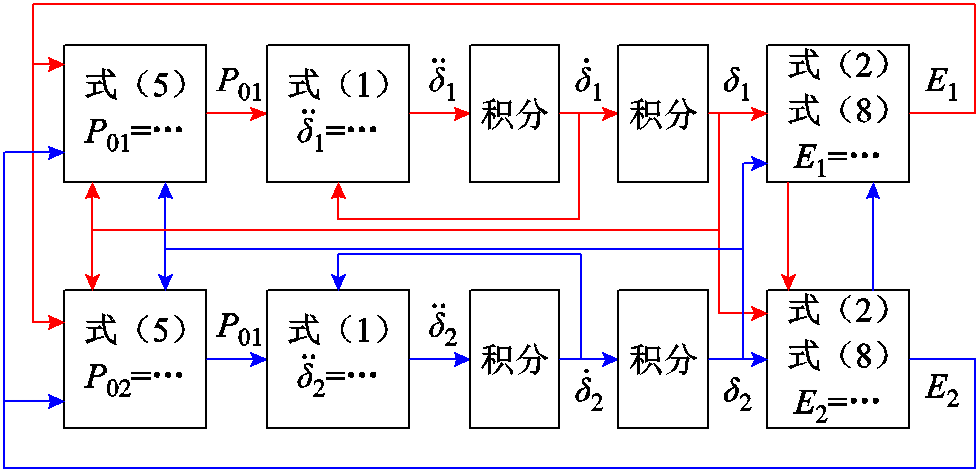
图7 VSC双机并联系统关键耦合参数
Fig.7 Key coupling parameters of two VSCs paralleled system
由上述分析,根据图7构建双机并联系统的非线性微分方程,采用相平面法解析并联系统在不同电网电压跌落程度下的运动轨迹如图8所示,其中Δd=Δd12-d12,Δd 为VSC双机并联系统相位差。由图8可知,当电网电压跌落至0.8 (pu),VSC1和VSC2均能从稳态平衡点过渡至新的平衡点。在双机并联系统暂态响应前期,即t<0.08 s:Δd12<0,VSC2向VSC1提供暂态能量;当t>0.08 s:Δd12>0。可见暂态响应后期到系统稳定,VSC1向VSC2提供暂态能量。暂态响应过程中,Δd 变化波动较大,暂态能量的交互影响使得VSC2暂态响应曲线不同于常规的暂态响应曲线。
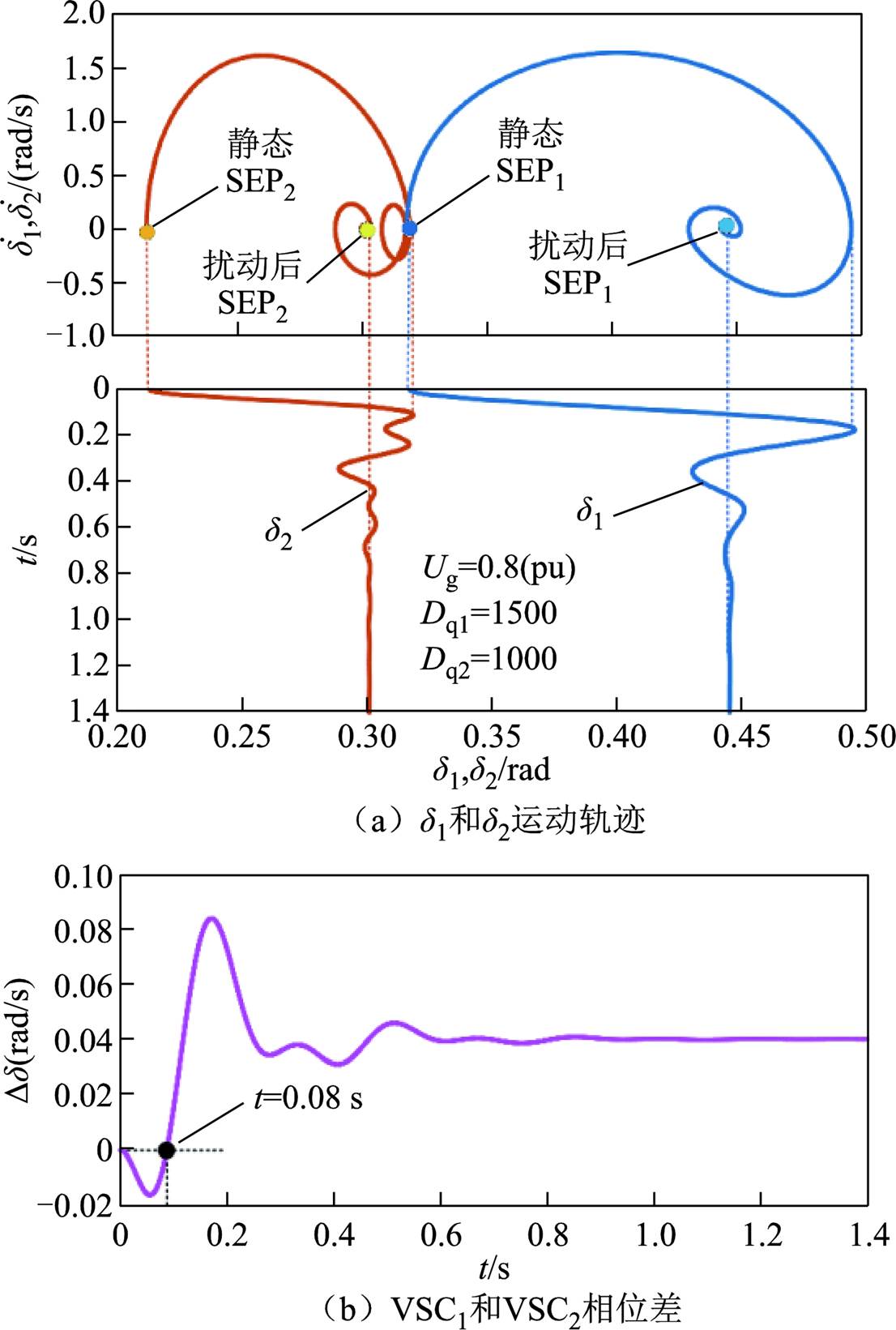
图8 VSC双机并联系统暂态相平面图(Ug=0.8(pu))
Fig.8 Transient phase diagram of two VSCs paralleled system (Ug=0.8 (pu))
VSC双机并联系统暂态相平面图(Ug=0.5(pu))如图9所示。由图9a和图9b分析,当电网电压跌落至0.5(pu),跌落程度较深,VSC1,2未能从静态平衡点过渡到新的平衡点。响应前期,当t<0.13 s时,Δd12<0,VSC2向VSC1提供暂态能量,当t>0.13 s时,Δd12>0,VSC1向VSC2提供暂态能量,VSC1,2均向稳定点移动,由图9a相图轨迹,VSC1率先失稳,而VSC2在暂态响应过程中消耗了VSC1一部分暂态能量,d2尽管持续增加,但有返回暂态稳定点趋势,最终VSC1,2无法消耗电压跌落所带来的暂态能量,系统整体失稳。
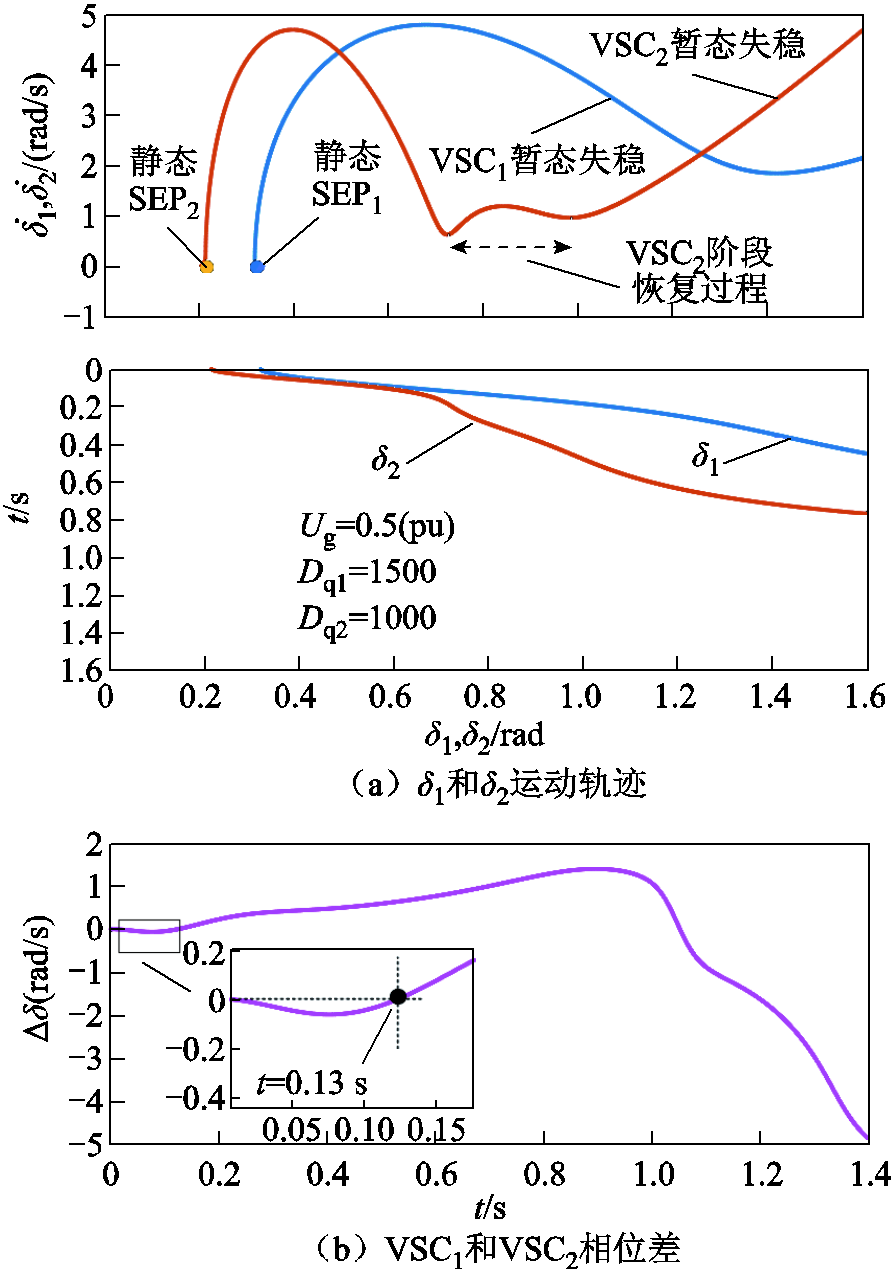
图9 VSC双机并联系统暂态相平面图(Ug=0.5(pu))
Fig.9 Transient phase diagram of two VSCs paralleled system (Ug=0.5(pu))
由图8和图9可知,并联系统在Ug=0.5(pu)时暂态失稳。根据1.2节分析可知,Dq为并联系统电压支撑能力的重要参数,图10为Ug=0.5(pu)时增大Dq值对并联系统暂态稳定性的影响。由图10a和图10b分析,增大Dq1和Dq2值,在电网电压跌落至0.5 (pu)时,响应前期,当t<0.15 s时,Δd12<0,VSC2向VSC1提供暂态能量,当t>0.15 s时,Δd12>0,VSC1向VSC2提供暂态能量,VSC1和VSC2均向稳定点移动,VSC1和VSC 2能从静态平衡点过渡到新的平衡点,可见,增大Dq1和Dq2值有利于并联系统的暂态稳定性。
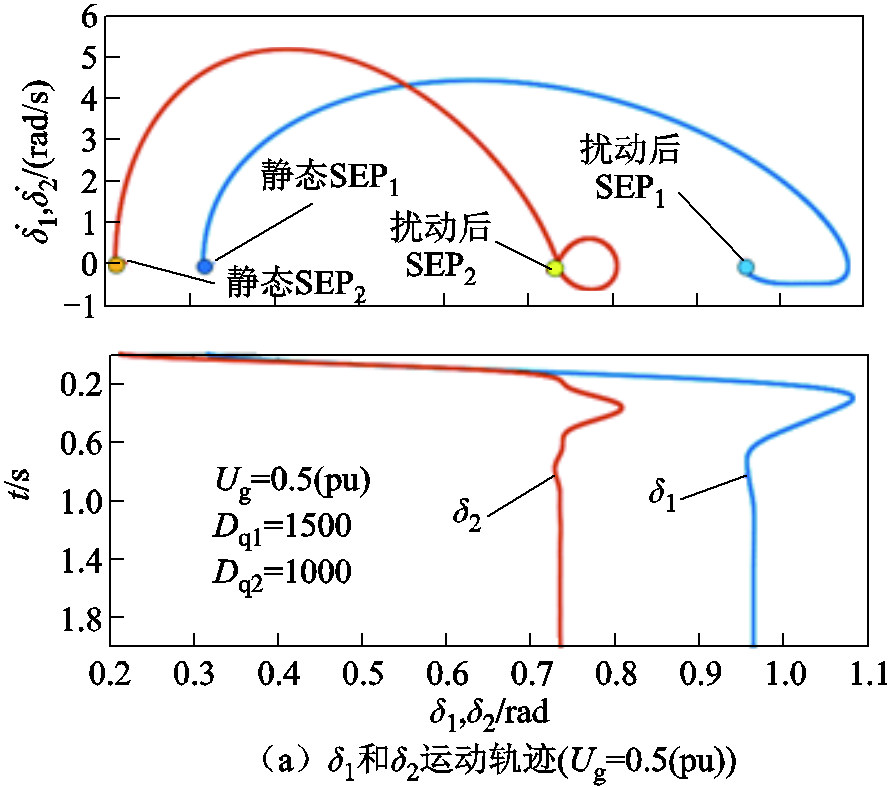
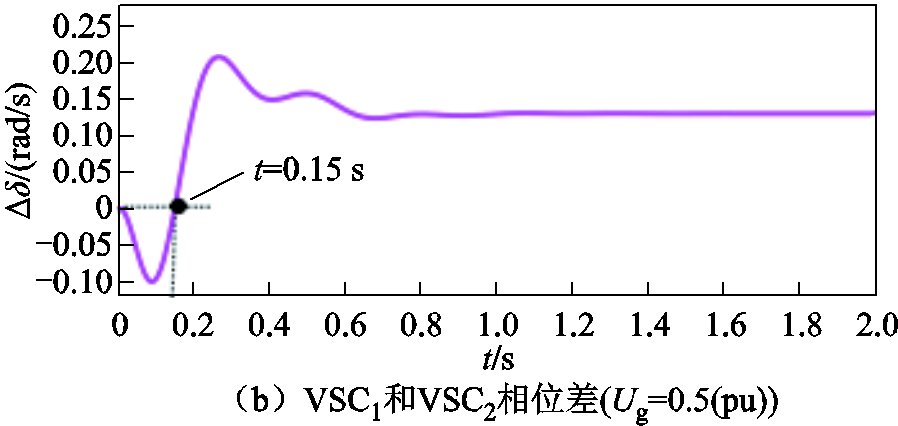
图10 VSC双机并联系统暂态相平面图(Dq1=4 500,Dq2=3 000)
Fig.10 Transient phase diagram of two VSCs paralleled system (Dq1=4 500, Dq2=3 000)
由式(2)和式(3)可得并网点电压Uc的表达式为
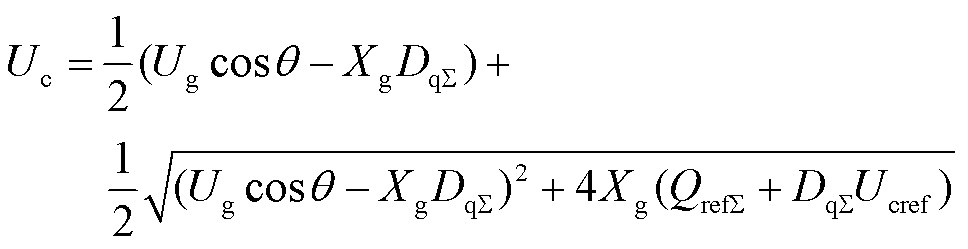 (9)
(9)
式中,QrefS =Qref1+Qref2;DqS=Dq1+Dq2;
 。
。
令PrefS =Pref1+Pref2,由式(9)可得电网电压Ug跌落故障下未及时切除的PL-q 曲线如图11所示。根据1.3节分析,为提高并联系统的稳定性,其主要思想是使系统整体的加速面积小于减速面积。图11a为正常电网电压跌落故障下的PL-q 曲线,图11b为在发生电网电压Ug跌落故障时,降低并联系统的有功参考值PrefS。对比图11a可知,故障时,降低有功参考值,使得系统整体的加速面积小于降低功率前的加速面积,其对应的减速面积增大,即 、
、 ,减小加速面积的同时,增加了减速面积,提高了并联系统的暂态稳定性。图11c为在发生电网电压Ug跌落故障时,增加DqS值实际是提高Uc抬升PL-q曲线,使得
,减小加速面积的同时,增加了减速面积,提高了并联系统的暂态稳定性。图11c为在发生电网电压Ug跌落故障时,增加DqS值实际是提高Uc抬升PL-q曲线,使得 ,
, ,从而达到提高并联系统的暂态稳定性的效果。
,从而达到提高并联系统的暂态稳定性的效果。
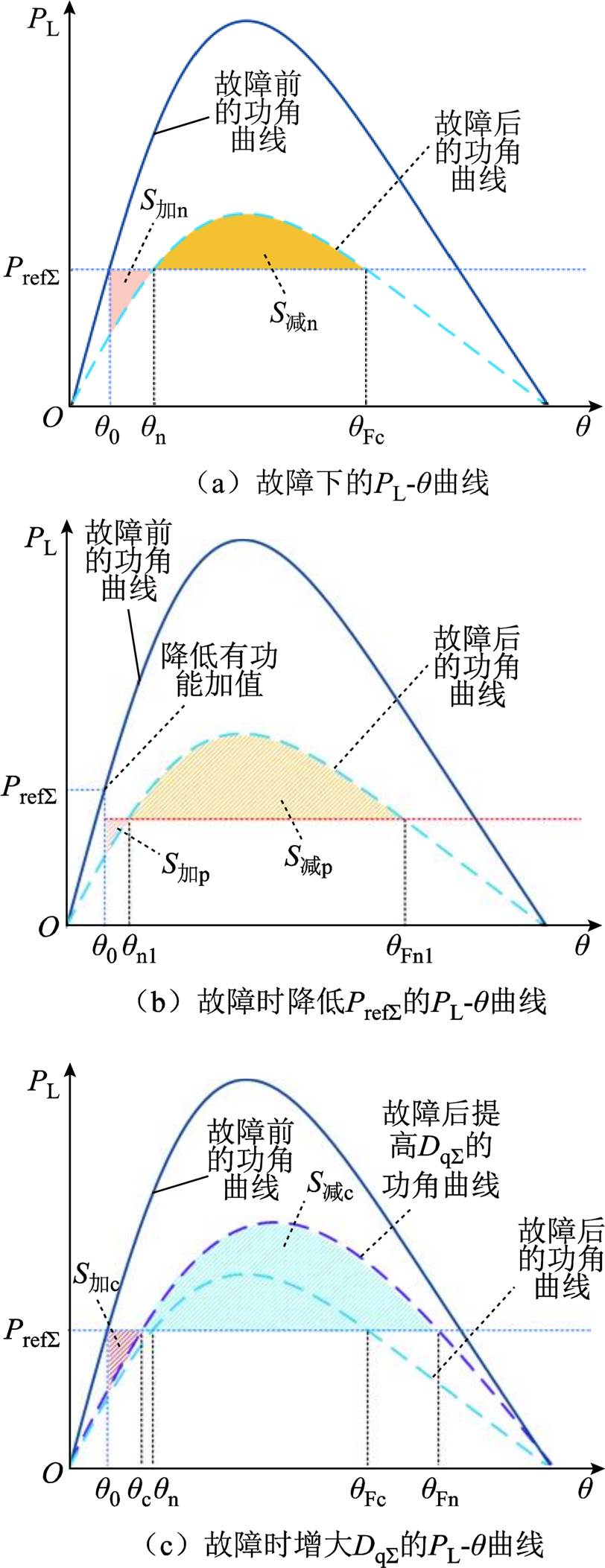
图11 Ug跌落故障下并联系统PL-q曲线
Fig.11 PL-q diagram of paralleled system under Ug drop fault
根据式(3),令M=0.5(Ugcosq–XgDqS),得到Uc关于q 的导数为
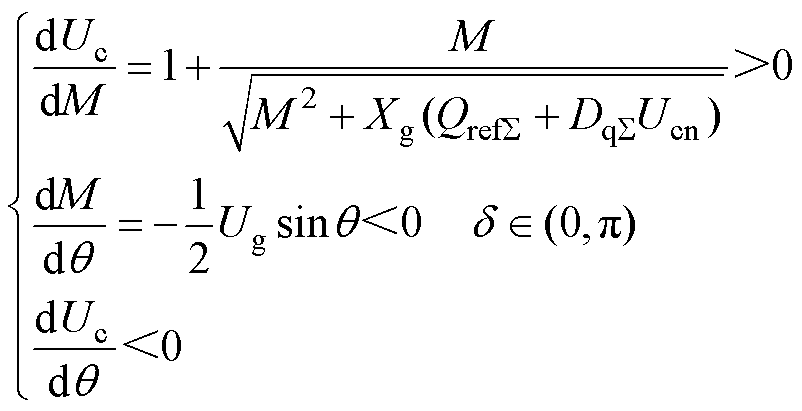 (10)
(10)
则并网点电压Uc与功角q呈负相关。令N=4Xg(QrefS+ DqSUcn),得到Uc关于DqS的导数为
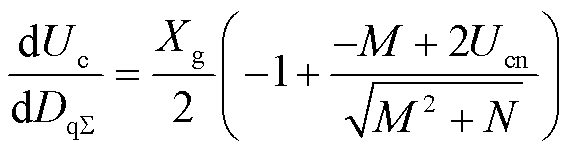 (11)
(11)
即
 (12)
(12)
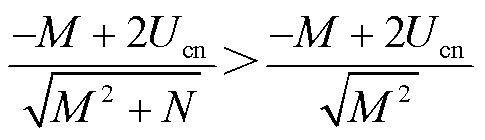
若 -4UcnM>N,即可得dUc/dDqS>0,通常情况下,VSC并联系统的无功指令值QrefS=0。即
-4UcnM>N,即可得dUc/dDqS>0,通常情况下,VSC并联系统的无功指令值QrefS=0。即
 (13)
(13)
结合式(12)和式(13)可知,对于VSC并联系统,并网点电压参考值Ucn基于电网电压Ug设计,并联系统的相位q ≥0,而Ucn作为额定电压幅值。由此可知在电网电压跌落故障下Ucn≥Ugcosq,因此dUc/dDqS>0始终成立,Uc与DqS呈正相关。
图12为Uc在不同电网电压Ug跌落程度下关于q 和DqS数值变化关系,其中UgN、q0和Dq0S分别为并联系统正常运行工况下的电网电压、功角以及无功下垂系数。由图12a可知,若电网电压Ug持续跌落,且功角q 持续增大,则Uc持续降低。由图12b可知,当电网电压Ug持续跌落时,且无功调压系数DqS持续增大时,Uc增加。由此可见,在面对电网电压Ug持续跌落时,抑制q 增加、增加无功调压系数DqS都有利于提升并联系统的电压支撑能力。
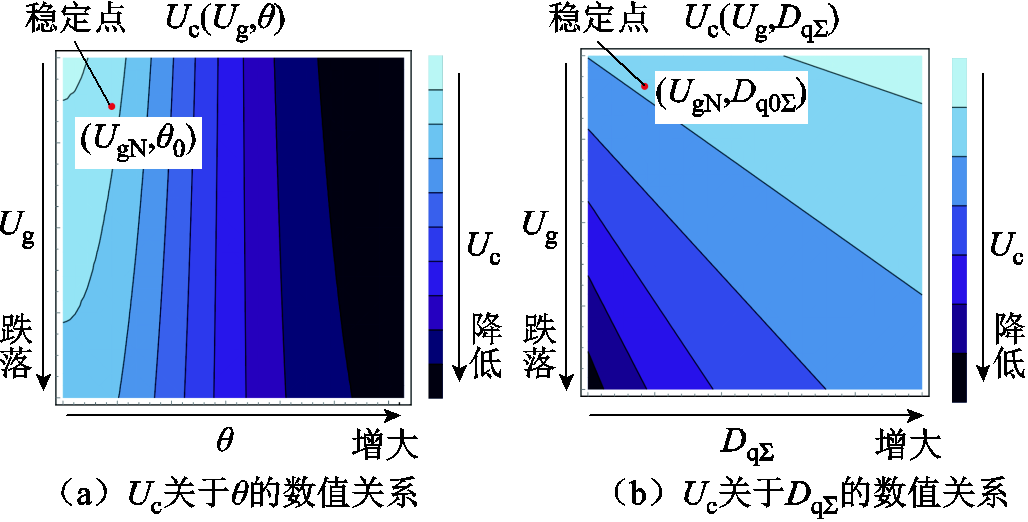
图12 Ug持续跌落,Uc关于q和DqS的数值关系
Fig.12 Uc numerical relationship between q and DqSas Ug decline
3.3.1 有功功率控制环改进
由3.1节和3.2节分析可知,为增强并联系统的暂态稳定性,可在电网电压跌落故障时降低有功功率参考值Pref或提高并网点电压Uc;若要提升并联系统电压支撑能力,则需要在电网电压跌落故障时避免q 持续增加,这也是增加系统暂态稳定性的条件之一,同时增大无功调压系数DqS值。并网点电压Uc和q 均为控制输出量,且q 受多参数影响,与VSC稳定性强相关,很难作为电压支撑的调节参数。由此可见,有功功率参考值PrefS和无功调压系数DqS作为控制量,可以灵活改变设计以提升并联系统的暂态稳定性和电压支撑能力。
令故障前并联系统输出功率为PLN,故障后并联系统输出功率为PLF,故障后的功角q 增大,为qF=q0+Dq,由此可得故障前后的功率为
 (14)
(14)
式中, 、
、 分别为VSC并联系统的故障前的输出电压和电网电压值。
分别为VSC并联系统的故障前的输出电压和电网电压值。
假设引入反馈控制后,Ug跌落功角变化不大,即Dq≈0,则sinDq≈Dq,cosDq≈1,将PLF进一步展开
式中, 、
、 分别为短路故障时并网点电压和电网电压。
分别为短路故障时并网点电压和电网电压。
由式(14)和式(15)得到不平衡功率DPL=PLN-PLF,可得发生电网电压跌落故障,应在功率参考指令引入的动态电压功角补偿值为
 (16)
(16)
将式(16)引入如图1b的有功控制环中;令KPi=Prefi/PrefS,并联系统的改进有功环控制结构如图13所示。
图13 改进有功环控制结构
Fig.13 Improved active loop control structure
3.3.2 无功功率控制环改进
为提升并联系统的电压支撑能力,在无功控制环中引入变无功调压系数控制。由式(9)可以进一步细化Uc、Ug和DqS三个参数之间的关系,图14为其关系的三维曲面图。
图14 Uc关于Ug和DqS关系曲面图
Fig.14 Uc relation surface diagram between Ug and DqS
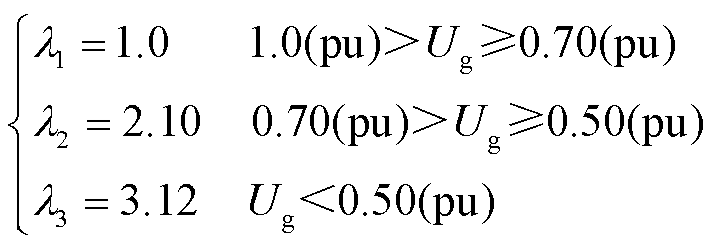
当在并网点电压Uc在0.9(pu)~1.0(pu)变化时,认为并联系统正常运行,电压处于正常区间,此时无功调压系数为正常大小,即常运行工况下VSC并联系统的无功下垂系数总和Dq0S。而出现电网电压跌落故障时,并联系统需要发出无功支撑并网点电压Uc,使其维持在一个较高的电压幅值,以0.90(pu)>Ug≥0.85(pu)为控制目标,得到在不同电网电压跌落故障所对应的DqS值。以Uc=0.90(pu)界限为Ug-DqS参考线,设置变系数li,使得Uc处于控制范围内。当1.0(pu)>Ug≥0.7(pu)时,其最低点为a1点,为轻度跌落,此时DqS=Dq0S=1.0(pu)即可满足控制要求;当0.7(pu)>Ug≥0.5(pu),为中度跌落,即当Ug处于a2点时,所对应的为b2点,此时DqS= 2.10(pu);当0.5(pu)>Ug≥0.3(pu),跌落程度严重,a3对应b3,即DqS=3.12(pu)。由图14和上述分析,可得变系数li的取值为
 (17)
(17)
其中
将式(17)引入如图1b的无功控制环中;令KDi=Dqi/Dq0S,其并联系统的改进无功环控制结构如图15所示。
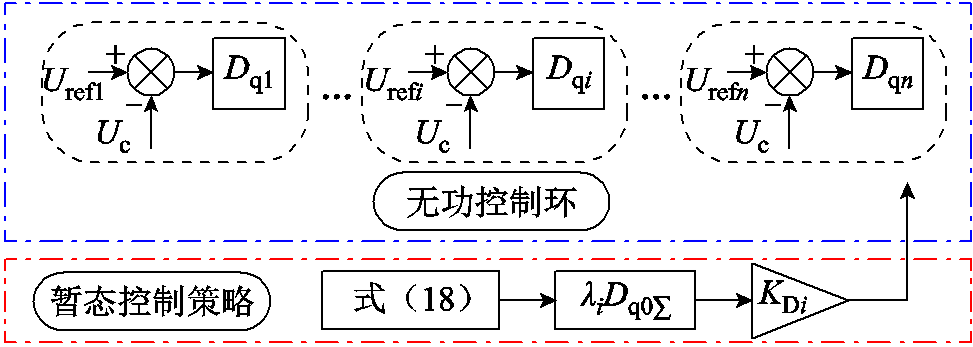
图15 改进无功环控制结构
Fig.15 Improved reactive control loop structure
为验证理论分析的正确性。由图1中VSC并联系统及控制结构,在Simulink中搭建VSC双机并联模型,仿真参数见表1。
表1 VSC双机并联系统主要控制参数
Tab.1 Main control parameters of two VSCs paralleled system
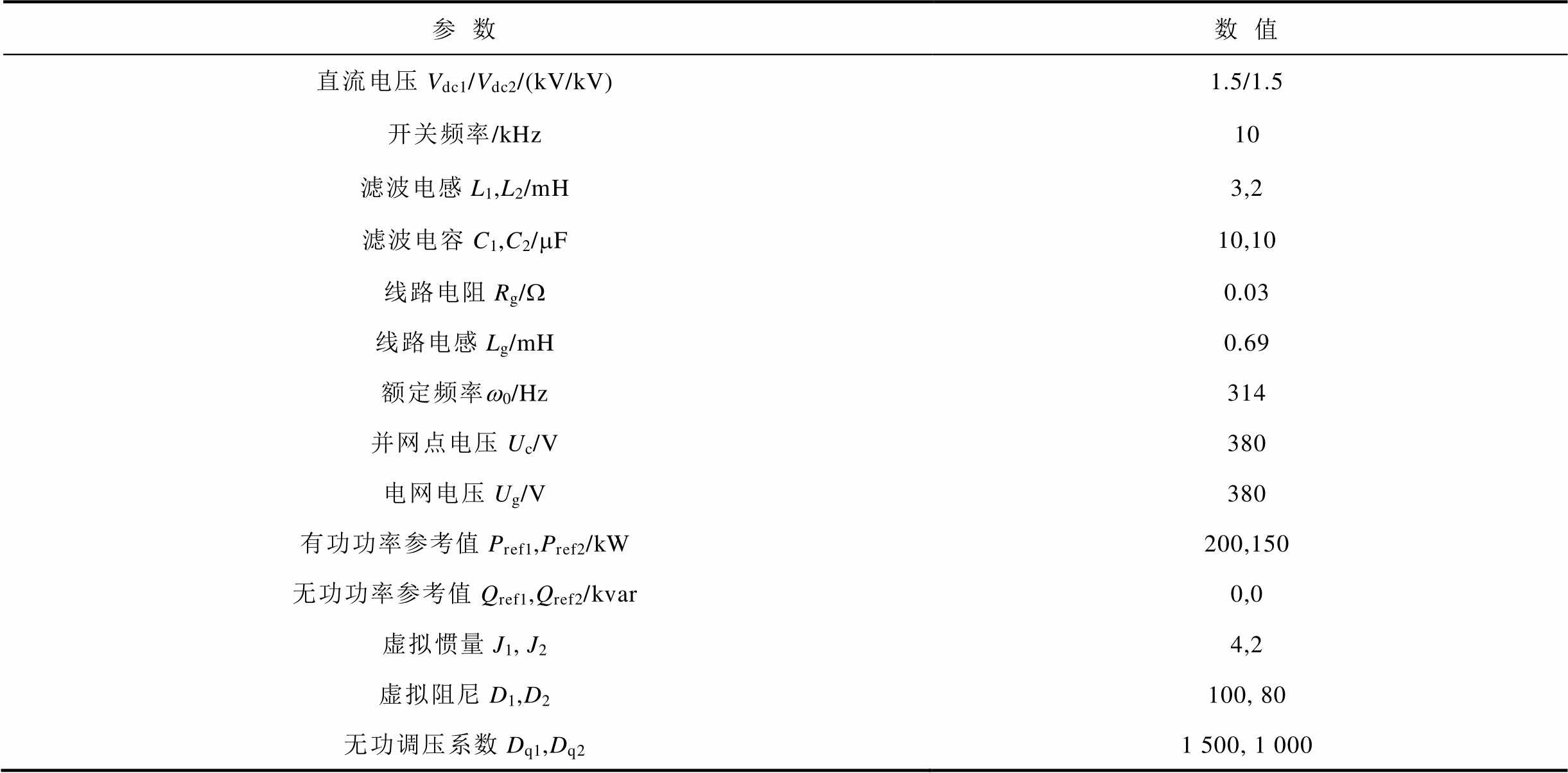
参数数值 直流电压Vdc1/Vdc2/(kV/kV)1.5/1.5 开关频率/kHz10 滤波电感L1,L2/mH3,2 滤波电容C1,C2/mF10,10 线路电阻Rg/W0.03 线路电感Lg/mH0.69 额定频率w0/Hz314 并网点电压Uc/V380 电网电压Ug/V380 有功功率参考值Pref1,Pref2/kW200,150 无功功率参考值Qref1,Qref2/kvar0,0 虚拟惯量J1, J24,2 虚拟阻尼D1,D2100, 80 无功调压系数Dq1,Dq21 500, 1 000
图16为双机并联系统在t=3 s时刻,Ug=0.8 (pu)时各输出波形。由图16可知,当Ug=0.8(pu)时,其有功输出值P01和P02分别下降至170.9 kW和126.3 kW,暂态稳定后,恢复有功功率参考值。无功功率Q01和Q02在暂态瞬间分别提升至28.2 kvar和24.2 kvar,后稳定至39.4 kvar和26.3 kvar;d1和d2的初始值为0.52 rad和0.40 rad,在暂态瞬间上升至0.61 rad和0.49 rad,后稳定至0.75 rad和0.62 rad;Δd 的初始值为0 rad,在Ug跌落瞬间升高,最大为0.023 rad,后稳定至0.02 rad,可见并联机组间存在暂态交互影响。
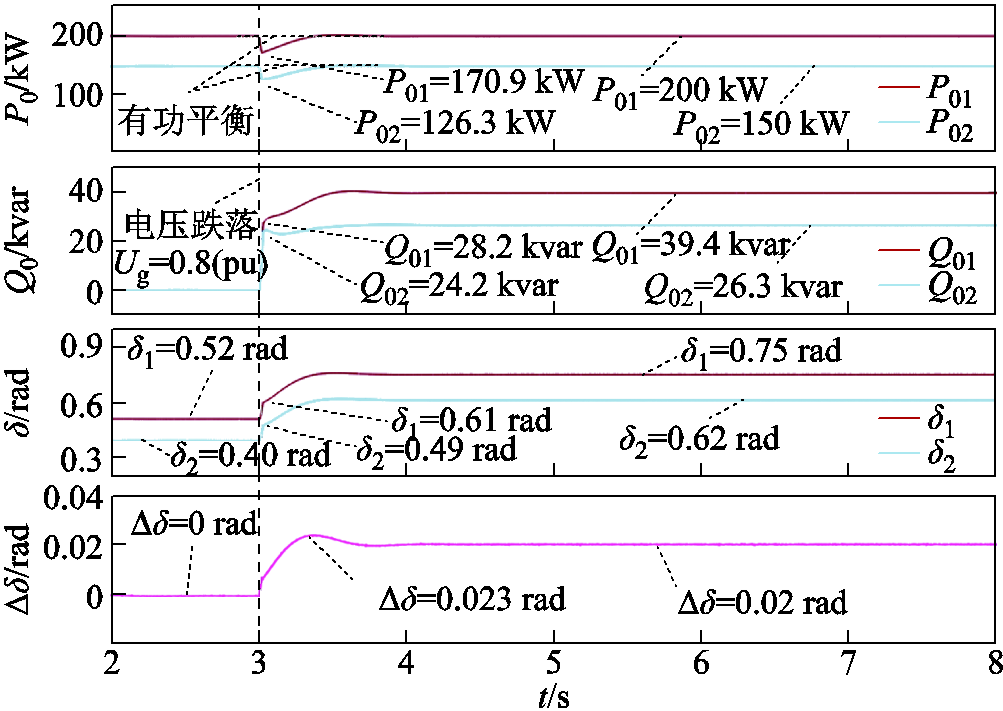
图16 VSC双机并联系统暂态交互影响(Ug=0.8 (pu))
Fig.16 Transient interaction of two VSCs paralleled system (Ug=0.8 (pu))
图17为双机并联系统在t=0.3 s时Ug跌落至0.4(pu),不同Dq1和Dq2值对于并联暂态稳定性的影响。由图17a可知Dq1=1 500,Dq2=1 000时,发生电压跌落故障,功角持续增大,并联系统输出功率、电压和功角均出现振荡,系统暂态失稳。
与图17a相比,图17b中Dq1和Dq2分别增加至3 000和2 000,并联系统失稳时间推迟。图17c中Dq1和Dq2分别增加至4 500和3 000,电网电压跌落后有功功率输出P01和P02分别下降至130.7 kW 和88.3 kW,有功功率平衡;无功功率Q01和Q02在分别达到189.9 kvar和126.6 kvar;并网点电压Uc暂态稳定后维持在0.82(pu),并联系统功角q 增加至1.2 rad。可见Dq1和Dq2增大后并联系统增发无功功率支撑并网点电压,可以改善并联系统的稳定性。
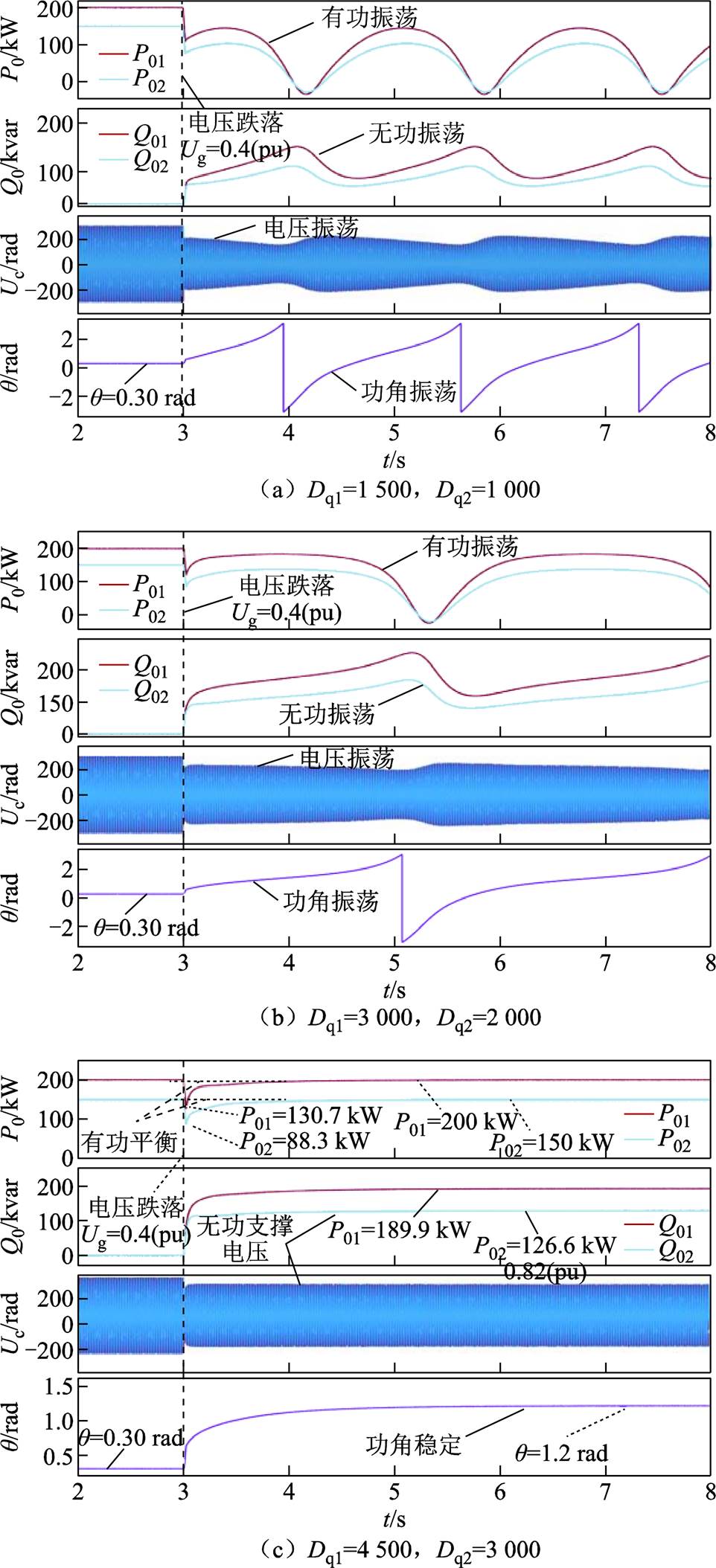
图17 Dq1和Dq2值变化的并联系统波形(Ug=0.4 (pu))
Fig.17 Paralleled system simulation waveforms with different Dq1 and Dq2 values (Ug=0.4(pu))
本文基于StarSim硬件在环半实物仿真平台搭建了双机并联模型验证本文所提方法,如图18所示。上位机为PC,下位机为HIL实时仿真器,上位机与下位机通过信号交换机连接,主电路运行在HIL的FPGA中,控制电路运行在HIL的多核CPU中,主电路与控制电路背板总线信号交互,关键参数见表1。图19为未采用联合调节方案的储能VSC并联系统输出波形。Uca为三相并网点电压中的a相电压,当电网电压Ug跌落至0.5(pu),VSC并联系统输出的有功功率经过短暂的恢复后,输入-输出不平衡,无功支撑电压能力明显不足,电压和功率出现振荡,VSC并联系统暂态失稳。
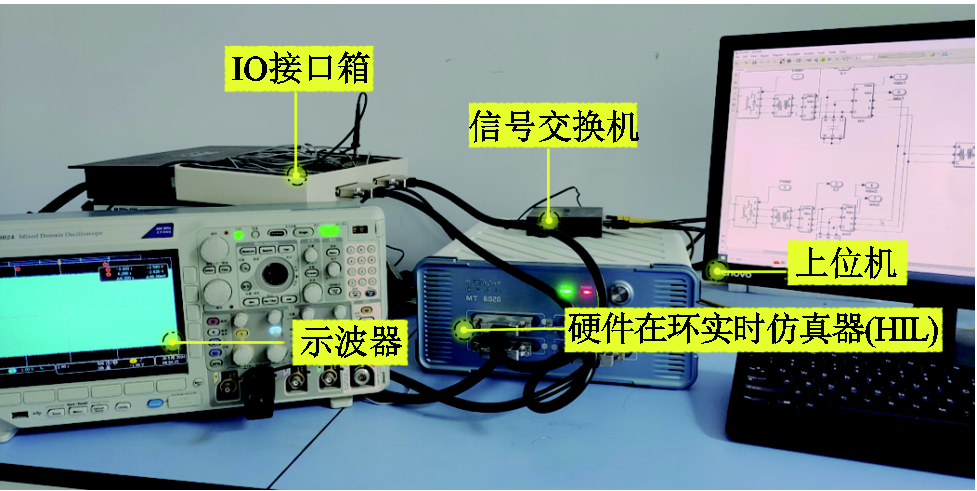
图18 硬件在环实时仿真平台结构
Fig.18 Hardware-in-the-loop real-time simulation platform structure
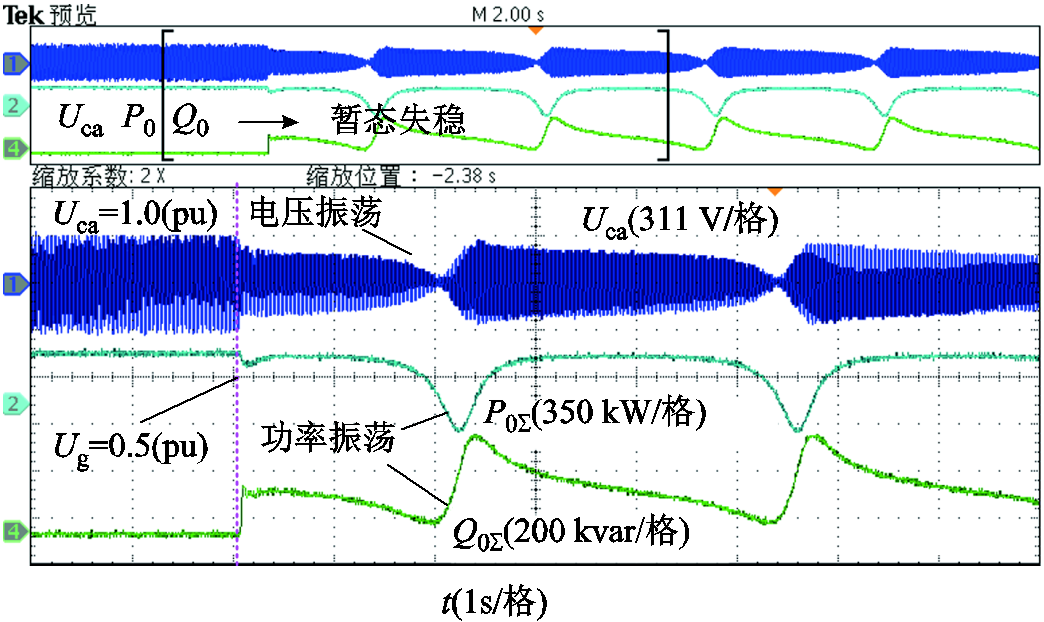
图19 未采用联合调节方案的储能VSC并联系统输出波形(Ug=0.5 (pu))
Fig.19 Output waveform of paralleled VSCs without joint adjustment scheme (Ug=0.5 (pu))
图20为采用联合调节方案的储能VSC并联系统在不同电压跌落故障下的输出波形。Ug分别跌落至0.7(pu)、0.5(pu)和0.3(pu),并联系统输出有功功率分别下降至222 kW、174 kW和138 kW,而无功功率分别增加至87.5 kvar、270 kvar和342 kvar;并网点电压分别稳定在0.88(pu)、0.87(pu)和0.85(pu)。
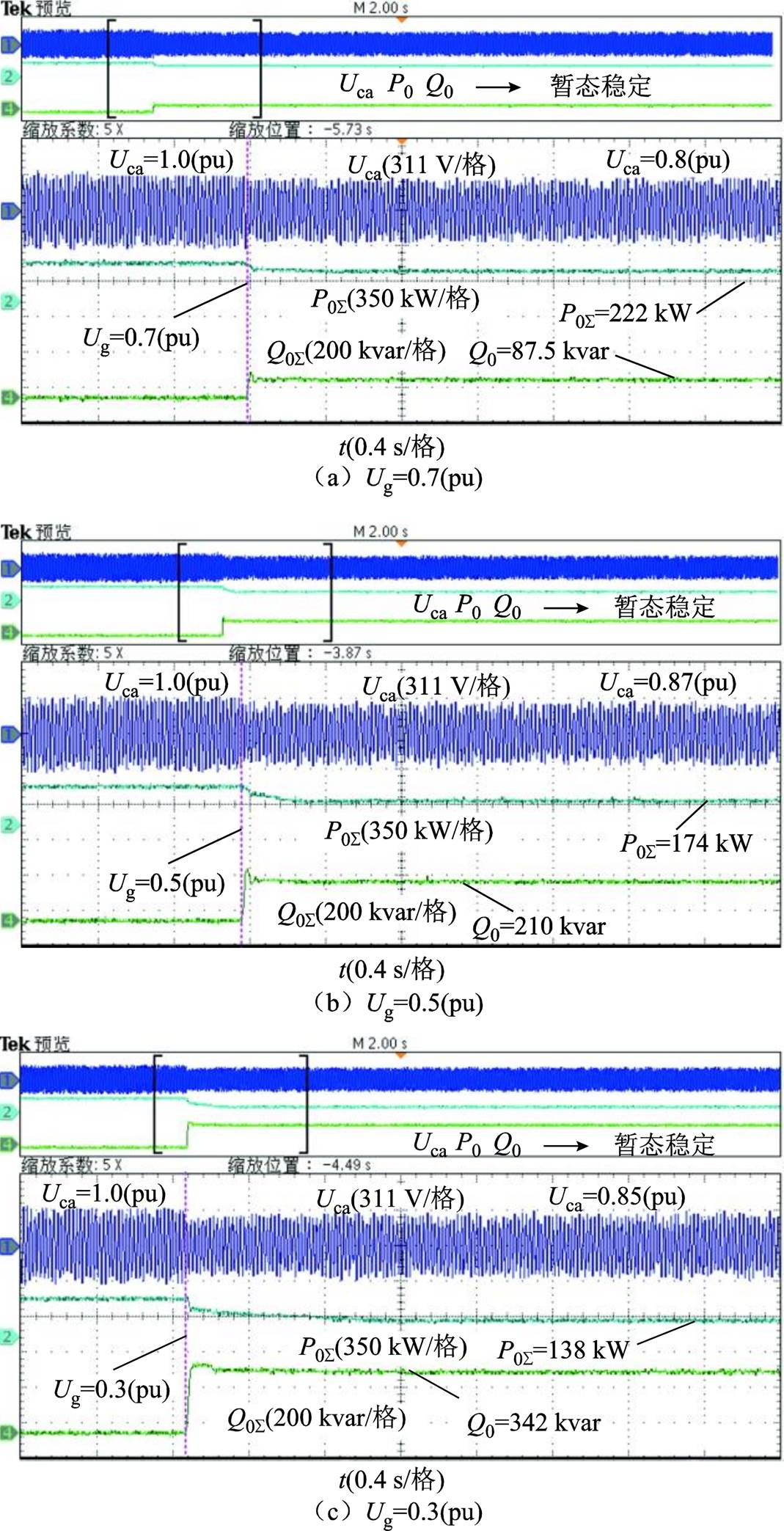
图20 采用联合调节后储能VSC并联系统的输出波形
Fig.20 Output waveforms of paralleled VSCs with joint adjustment scheme under different Ug
上述分析表明:基于改进功率环联合调节的储能VSC多机并联暂态电压支撑提升优化控制可以适应于不同电网电压跌落工况。具体表现为:电网电压跌落越严重,并联系统有功功率下降越多,无功功率增发量越大,并联系统的暂态稳定性和电压支撑能力明显提升。
本文研究了主动支撑型储能VSC并联系统在电网电压跌落故障下的暂态响应特性,揭示了故障下VSC并联系统中机组间的暂态交互影响机理;通过建立VSC并联系统的数学模型,分析了无功调压系数变化对VSC并联系统稳定性及电压支撑能力的影响规律,梳理了功率控制环参数变化提升并联系统暂态输出特性逻辑。由此设计了VSC多机并联系统联合调节方案。主要结论如下:
1)暂态响应过程中各VSC机组间的相位变化量有差异导致功率流动,这是电网电压跌落故障下,VSC并联机组间存在暂态能量交互影响的主要原因。而交互能量的流向主要由各VSC机组间的相位决定。
2)VSC机组间的暂态交互作用影响储能系统的暂态稳定性。主要表现为稳定性差的VSC向稳定性更好的VSC馈入暂态能量,在提升自身的稳定性的同时会降低其他VSC的稳定性,VSC并联机组稳定性最终会趋于一致。
3)电网电压跌落故障情况下,功角增大不仅会恶化VSC并联系统的稳定性,还会降低VSC并联系统的电压支撑能力,增大VSC并联系统的无功调压系数和降低输出有功功率可以改善系统稳定性和电压支撑能力。
4)VSC并联系统的电压支撑能力和暂态稳定性存在相互作用,改进功率环联合调节方案,能够在不同电网电压跌落程度故障下保持VSC并联系统稳定运行,同时提高暂态电压支撑能力。
参考文献
[1] 杨金洲, 李业成, 熊鸿韬, 等. 新能源接入的受端电网暂态电压失稳高风险故障快速筛选[J]. 电工技术学报, 2024, 39(21): 6746-6758.
Yang Jinzhou, Li Yecheng, Xiong Hongtao, et al. A fast screening method for the high-risk faults with transient voltage instability in receiving-end power grids interconnected with new energy[J]. Transactions of China Electrotechnical Society, 2024, 39(21): 6746-6758.
[2] 刘思佳, 刘海涛, 张隽, 等. 基于等效阻抗的虚拟同步机电压支撑影响因素分析与改进控制策略研究[J]. 电工技术学报, 2025, 40(9): 2738-2751.
Liu Sijia, Liu Haitao, Zhang Jun, et al. Research on the analysis of virtual synchronous generator voltage support influence factors and improvement control strategies based on equivalent impedance[J]. Transactions of China Electrotechnical Society, 2025, 40(9): 2738-2751.
[3] 郭小龙, 杨桂兴, 张彦军, 等. 构网型储能变流器并网系统SISO环路增益建模与重塑控制[J]. 电气技术, 2023, 24(2): 24-31, 51.
Guo Xiaolong, Yang Guixing, Zhang Yanjun, et al. Modeling and reshaping control of single input and single output loop gain of the grid-forming energy storage converter grid-connected system[J]. Electrical Engineering, 2023, 24(2): 24-31, 51.
[4] 李建林, 邹菲, 游洪灏, 等. 构网型储能变流器自适应低电压穿越控制策略[J]. 电工技术学报, 2025, 40(9): 2724-2737.
Li Jianlin, Zou Fei, You Honghao, et al. Adaptive low-voltage ride-through control strategy of grid-forming energy storage converter[J]. Transactions of China Electrotechnical Society, 2025, 40(9): 2724-2737.
[5] 王继磊, 张兴. 多逆变器并联系统暂态稳定性分析及其暂态电流注入策略[J]. 高电压技术, 2025, 51(1): 390-400.
Wang Jilei, Zhang Xing. Transient stability analysis and transient current injection strategy of multi-inverter parallel system[J]. High Voltage Engineering, 2025, 51(1): 390-400.
[6] 黄萌, 舒思睿, 李锡林, 等. 面向同步稳定性的电力电子并网变流器分析与控制研究综述[J]. 电工技术学报, 2024, 39(19): 5978-5994.
Huang Meng, Shu Sirui, Li Xilin, et al. A review of synchronization-stability-oriented analysis and control of power electronic grid-connected converters[J]. Transactions of China Electrotechnical Society, 2024, 39(19): 5978-5994.
[7] Chen Shimiao, Sun Yao, Han Hua, et al. Dynamic frequency performance analysis and improvement for parallel VSG systems considering virtual inertia and damping coefficient[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2023, 11(1): 478-489.
[8] 孙鹏飞, 田震, 查晓明, 等. 功率同步型构网变流器并网系统暂态同步稳定性研究综述[J]. 电力系统自动化, 2025, 49(2): 1-19.
Sun Pengfei, Tian Zhen, Zha Xiaoming, et al. Review on research of transient synchronization stability for grid-connected system based on power-synchronization grid-forming converter[J]. Automation of Electric Power Systems, 2025, 49(2): 1-19.
[9] Koudelka J, Macejko S, Toman P, et al. Simplified dynamic model for continental Europe synchronous area separation[C]//2022 22nd International Scientific Conference on Electric Power Engineering (EPE), Koutynad Desnou, Czech Republic, 2022: 1-5.
[10] 杨铭, 曹武, 赵剑锋, 等. 受控电压/电流源型变流器混合多机暂态电压支撑策略[J]. 电工技术学报, 2023, 38(19): 5207-5223, 5240.
Yang Ming, Cao Wu, Zhao Jianfeng, et al. Transient voltage support strategy for hybrid multi-converter of controlled voltage/current source converter[J]. Transactions of China Electrotechnical Society, 2023, 38(19): 5207-5223, 5240.
[11] 郑晨灿, 孙海斌, 王学斌, 等. 基于等效无功弹性的变换器电压支撑能力评估[J]. 华中科技大学学报(自然科学版), 2024, 52(7): 22-28.
Zheng Chencan, Sun Haibin, Wang Xuebin, et al. Evaluation of voltage support capability of transformers based on equivalent reactive power elasticity[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2024, 52(7): 22-28.
[12] 王雪梅, 王艺博, 刘雨桐, 等. 基于虚拟电抗的主动支撑型新能源机组低电压穿越控制方法[J]. 电网技术, 2022, 46(11): 4435-4444.
Wang Xuemei, Wang Yibo, Liu Yutong, et al. Low voltage ride-through control of actively-supported new energy unit based on virtual reactance[J]. Power System Technology, 2022, 46(11): 4435-4444.
[13] Camacho A, Castilla M, Miret J, et al. Positive and negative sequence control strategies to maximize the voltage support in resistive–inductive grids during grid faults[J]. IEEE Transactions on Power Electronics, 2018, 33(6): 5362-5373.
[14] 李大伟, 唐守元, 朱婉路, 等. 基于自适应Q-V特性的储能暂态电压支撑控制策略研究[J]. 太阳能学报, 2024, 45(12): 536-544.
Li Dawei, Tang Shouyuan, Zhu Wanlu, et al. Research on control strategy of ess transient voltage support based on adaptive q-v characteristic[J]. Acta Energiae Solaris Sinica, 2024, 45(12): 536-544.
[15] 姜卫同, 胡鹏飞, 尹瑞, 等. 基于虚拟同步机的变流器暂态稳定分析及混合同步控制策略[J]. 电力系统自动化, 2021, 45(22): 124-133.
Jiang Weitong, Hu Pengfei, Yin Rui, et al. Transient stability analysis and hybrid synchronization control strategy of converter based on virtual synchronous generator[J]. Automation of Electric Power Systems, 2021, 45(22): 124-133.
[16] Dong Dong, Wen Bo, Boroyevich D, et al. Analysis of phase-locked loop low-frequency stability in three-phase grid-connected power converters considering impedance interactions[J]. IEEE Transactions on Industrial Electronics, 2015, 62(1): 310-321.
[17] 袁豪, 袁小明. 用于系统直流电压控制尺度暂态过程研究的电压源型并网变换器幅相运动方程建模与特性分析[J]. 中国电机工程学报, 2018, 38(23): 6882-6892, 7122.
Yuan Hao, Yuan Xiaoming. Modeling and characteristic analysis of grid-connected VSCs based on amplitude-phase motion equation method for power system transient process study in DC-link voltage control timescale[J]. Proceedings of the CSEE, 2018, 38(23): 6882-6892, 7122.
[18] Shuai Zhikang, Shen Chao, Liu Xuan, et al. Transient angle stability of virtual synchronous generators using Lyapunov’s direct method[J]. IEEE Transactions on Smart Grid, 2019, 10(4): 4648-4661.
[19] 罗聪, 陈燕东, 谢志为, 等. 计及电压动态的构网型变流器多机并联系统暂态建模与稳定域估计[J]. 电工技术学报, 2025, 40(9): 2752-2765.
Luo Cong, Chen Yandong, Xie Zhiwei, et al. Transient model and stability region estimation for multiple paralleled grid-forming inverter system[J]. Transactions of China Electrotechnical Society, 2025, 40(9): 2752-2765.
[20] He Xiuqiang, Geng Hua, Li Ruiqi, et al. Transient stability analysis and enhancement of renewable energy conversion system during LVRT[J]. IEEE Transactions on Sustainable Energy, 2020, 11(3): 1612-1623.
[21] Chiang H D, Hirsch M W, Wu F F. Stability regions of nonlinear autonomous dynamical systems[J]. IEEE Transactions on Automatic Control, 1988, 33(1): 16-27.
[22] Wang Guangyu, Fu Lijun, Hu Qi, et al. Transient synchronization stability of grid-forming converter during grid fault considering transient switched operation mode[J]. IEEE Transactions on Sustainable Energy, 2023, 14(3): 1504-1515.
[23] 黄萌, 凌扬坚, 耿华, 等. 功率同步控制的构网型变流器多机交互分析与稳定控制研究综述[J]. 高电压技术, 2023, 49(11): 4571-4583.
Huang Meng, Ling Yangjian, Geng Hua, et al. An overview on multi-VSCs interaction analysis and stability controls of grid-forming converters with power synchronization control[J]. High Voltage Engineering, 2023, 49(11): 4571-4583
[24] 路焱, 宋晓辉, 盛万兴, 等. 计及低电压穿越过程电流动态的新能源并网系统暂态同步稳定分析方法和控制策略[J]. 电网技术, 2025, 49(11): 4556-4567.
Lu Yan, Song Xiaohui, Sheng Wanxing, et al. Analysis method and control strategy for transient synchronous stability of grid-connected new energy resources system considering current dynamics during LVRT[J]. Power System Technology, 2025, 49(11): 4556-4567.
[25] Sun Kun, Yao Wei, Wen Jinyu, et al. A two-stage simultaneous control scheme for the transient angle stability of VSG considering current limitation and voltage support[J]. IEEE Transactions on Power Systems, 2022, 37(3): 2137-2150.
[26] Pal D, Panigrahi B K. Reduced-order modeling and transient synchronization stability analysis of multiple heterogeneous grid-tied inverters[J]. IEEE Transactions on Power Delivery, 2023, 38(2): 1074-1085.
[27] Yi Xiangtong, Peng Yelun, Zhou Quan, et al. Transient synchronization stability analysis and enhancement of paralleled converters considering different current injection strategies[J]. IEEE Transactions on Sustainable Energy, 2022, 13(4): 1957-1968.
[28] 徐耀, 朱玲, 吕振宇, 等. 虚拟同步机孤岛并联系统暂态同步稳定性分析[J]. 电力系统保护与控制, 2023, 51(15): 1-11.
Xu Yao, Zhu Ling, Lü Zhenyu, et al. Transient synchronization stability analysis of a virtual synchronous machine isolated island parallel system[J]. Power System Protection and Control, 2023, 51(15): 1-11.
[29] He Xiuqiang, Pan Sisi, Geng Hua. Transient stability of hybrid power systems dominated by different types of grid-forming devices[J]. IEEE Transactions on Energy Conversion, 2022, 37(2): 868-879.
[30] Li Yujun, Lu Yiyuan, Yang Jialun, et al. Synchronization stability of multiple VSGs embedded power system with controller limits[J]. IEEE Transactions on Power Systems, 2025, 40(1): 834-849.
[31] 吴峰, 鲍颜红, 郑建勇, 等. 计及限流切换的构网型变换器并联系统暂态同步稳定分析[J]. 电力系统自动化, 2025, 49(1): 14-26.
Wu Feng, Bao Yanhong, Zheng Jianyong, et al. Transient synchronous stability analysis of parallel system of grid-forming converters considering current limiting switching[J]. Automation of Electric Power Systems, 2025, 49(1): 14-26.
Transient Voltage Optimization Control for Paralleled Active Support Energy Storage Converters
Abstract The high-proportion wind and solar powers have introduced weak-inertia and low-damping characteristics to power systems. These new changes reduce the ability of grid to resist the voltage and frequency disturbances. Meanwhile, due to the location far away from the main AC grid, the renewable energy bases have relatively weak grid connections. Grid-following inverters based on phase-locked loops have limited frequency and voltage regulation capabilities and cannot actively support grid voltage and frequency. With the employment of voltage-source converters (VSCs) active support control, energy storage systems can mimic the dynamic response of synchronous generators. This endows VSCs with frequency and voltage regulation capabilities and plays a crucial role in enhancing power system stability. Compared to a single VSC, paralleled multiple VSCs can provide greater redundancy and capacity. However, the differences among VSC units in paralleled system can affect system stability and voltage support during grid voltage sags.
Based on the above analysis, when the grid voltage experiences a voltage sag fault, the energy storage VSC faces two demands simultaneously: the transient stability requirements and active voltage support to the grid. Furthermore, the two demands are coupled with each other. To analyze the transient coupling characteristics of the paralleled VSC energy storage system, the dynamic response characteristics of internal electromotive force and grid-connection point voltage during transients are analyzed by the geometric relationship in the phasor diagram and the effect of reactive power loop control. The transient energy interaction impact on the stability of the individual VSC is explained based on the equal-area criterion. Moreover, with the phase-plane method, the transient stability of the paralleled VSC system is analyzed. Then, the influence law of control parameters in the power control loop on the transient stability and voltage support ability is summarized. Based on the above, a joint regulation scheme for improved power loops is proposed, which enables the VSC paralleled system to retain transient stability under grid faults of varying voltage-sag severity and raises the transient voltage support capability at the same time. Finally, the theoretical analysis and the proposed method are verified by simulations and experimental results.
As a result, the following conclusions can be drawn: (1) During grid voltage sags, transient energy interactions occur among multiple VSC units. This is mainly caused by the power flows during the transient response and the phase angle differences, which further determines the energy direction. (2) The transient interactions of paralleled VSC system during grid voltage sags affect their transient stability. Unstable VSC units provide transient energy to the other more stable ones, which can improve their own stability but reduce the stability of the other highly stable VSC units, until the stability of all units tends to align. (3) During the grid voltage sags, the increased power angles not only reduce the transient stability of paralleled system, but also weaken their voltage support. It is effective to enhance system stability and voltage support by increasing the reactive power voltage coefficient and reducing active power output. (4) The voltage support capability and transient stability of the VSC paralleled system are mutually coupled. By improving power loop, the joint regulation can ensure the stable operation of the multiple VSC units under different grid faults with diverse voltage sag degrees and enhance the transient voltage support performance.
keywords:Multi-VSCs paralleled system, active voltage support, phase portrait, transient coupling, improved power loop based joint regulation
中图分类号:TM712
DOI: 10.19595/j.cnki.1000-6753.tces.250725
国家重点研发计划“储能与智能电网技术重点专项光伏、风电场站暂态频率电压主动快速支撑技术”资助项目(2021YFB2400500)。
收稿日期 2025-04-30
改稿日期 2025-07-03
赵正奎 男,1988年生,博士研究生,研究方向为新能源发电并网控制、储能系统并网控制。
E-mail:zhaozhengkui2020@163.com(通信作者)
韩民晓 男,1963年生,教授,博士生导师,研究方向为电力电子技术在电力系统中的应用。
(编辑 郭丽军)