
摘要 传统电力系统中的暂态电压稳定问题主要聚焦于受端电网中感应电动机的暂态稳定。然而,随着新能源大规模地接入送端电网,系统故障恢复期间同样面临严重的暂态电压失稳问题。目前的研究多采用数值仿真手段分析新能源接入对系统故障期间电压跌落程度的影响,并基于工程经验判据分析系统的电压稳定性,对新能源控制作用下系统暂态电压失稳的机理尚不清晰。为此,该文首先在揭示直流电压控制下新能源暂态电压失稳机理的基础上,进一步对比分析了传统电力系统中感应电动机与新能源并网系统暂态电压失稳机理的异同;其次,在量化分析新能源暂态同步稳定边界与暂态电压稳定边界的基础上提出暂态稳定主导因子指标,论证了弱电网中暂态电压稳定主导系统的暂态稳定边界的合理性;最后,基于电磁暂态仿真开展测试,验证了所提失稳机理和分析方法的有效性。
关键词:新能源并网系统 暂态电压失稳 直流电压控制 电压稳定边界 暂态稳定主导因子
同步发电机主导的传统电力系统中,暂态电压失稳问题主要由负荷侧感应电动机的转子动态特性及其非线性的转矩-转速特性共同引起[1-2]。与具有电压源特性的同步发电机不同,以电压源换流器(Voltage Source Converter, VSC)为接口的新能源机组大扰动后呈现快速且复杂的动态过程,其端电压暂态期间波动较大。因此,随着新能源大范围替代同步机电源,系统电源侧暂态电压支撑能力急剧下降,导致大扰动下系统电源侧的暂态电压失稳问题频发[3-4]。
国内外学者已针对电力电子装备并网系统的电压稳定问题开展了大量的研究工作。文献[5]基于准稳态方程提出了新能源并网系统电压失稳的高风险关键故障点快速筛选方法。在考虑换流器限流约束后,文献[6]基于P-V曲线量化了不同新能源控制模式下系统的电压稳定裕度。文献[7]基于广义短路比指标分析了直流多馈入系统中静态负荷对系统电压稳定裕度的影响。然而上述研究的本质是分析静态电压稳定问题,即认为系统代数方程奇异或电压幅值偏低是电压失稳的主要原因,并未考虑大扰动下控制器动态对电压失稳过程的影响,无法适用于暂态电压稳定性的分析。
目前,针对新能源并网系统暂态电压稳定问题的研究主要分为两类:①基于数值仿真得到的电压轨迹提出暂态电压稳定分析方法;②在忽略新能源控制器动态的基础上研究新能源对异步电动机暂态特性的影响,从而提出新能源并网系统中电动机的暂态电压失稳机理。在第①类研究中,文献[8-10]依据工程经验判据,利用多二元表法提出了暂态电压稳定裕度指标及控制方案。然而上述方法均基于工程经验判据,缺乏理论依据。文献[11-12]基于李雅普诺夫指数提出了暂态电压稳定判据,但需要基于数值计算或测量得到的系统电压轨迹,难以深入揭示系统暂态电压的失稳机理。为此,第②类研究从机理层面揭示系统暂态电压的失稳机理,从而指导稳定提升控制策略的设计。通过将新能源建模为恒定电流源,文献[13]量化了新能源对感应电动机暂态电压稳定裕度的影响,研究表明需要充足的新能源储备容量来避免电动机暂态电压失稳。文献[14]基于暂态期间的P-V曲线,分析了新能源故障期间从单位功率因数控制切换为低电压穿越控制时对电动机暂态特性的影响,从而评估了系统的暂态电压稳定性。文献[15]将虚拟同步机控制下的新能源建模为恒压源,从而分析了其对感应电动机暂态电压稳定性的影响。然而,上述研究仅关注电动机的暂态失稳,忽略了新能源控制器动态对系统暂态电压稳定边界的影响。因此,文献[16]分析了不同无功功率控制模式下构网型新能源的暂态电压失稳机理,研究结果表明,换流器无法满足系统无功功率的吸收限制是暂态电压失稳的主要原因。然而,对于实际工程中更多采用的跟网型新能源机组,其在直流电压控制下有功功率的调节动态同样会引起暂态电压稳定问题,且现有研究并未提及。
针对上述问题,本文首先分析了直流电压控制下新能源并网系统的暂态电压失稳机理,对比分析了所提失稳机理和传统电力系统中电动机暂态电压失稳机理的异同;其次论证了弱电网发生大扰动时新能源并网系统暂态电压稳定性与暂态同步稳定性的主导性,并基于所提暂态电压稳定裕度量化方法分析了系统参数对电压稳定性的影响;最后通过仿真验证了所提失稳机理和分析方法,以及所得结论的有效性。
新能源并网系统示意图如图1所示,其中配有LC滤波器的VSC通过线路Lg接入无穷大母线。图1中,Up和Ug分别为新能源并网点及无穷大母线的电压幅值,θpll为锁相环(Phase-Locked Loop, PLL)的输出相位,即在故障前稳态时等于新能源并网点电压相位θp。通常,新能源网侧换流器采用定直流电压控制以保持直流电压恒定,从而保证直流侧电源(风机、光伏等)能可靠传输功率。如图1所示,基于直流电压控制的跟网型换流器在正常运行时通常采用单位功率因数控制策略,即无功电流指令值为0,有功电流指令值为
式中,kpdc、kidc为直流电压控制器PI增益系数;Udc为直流电压,其指令值为Udcref;Ivdi、Ivdp分别为有功电流的比例和积分分量。
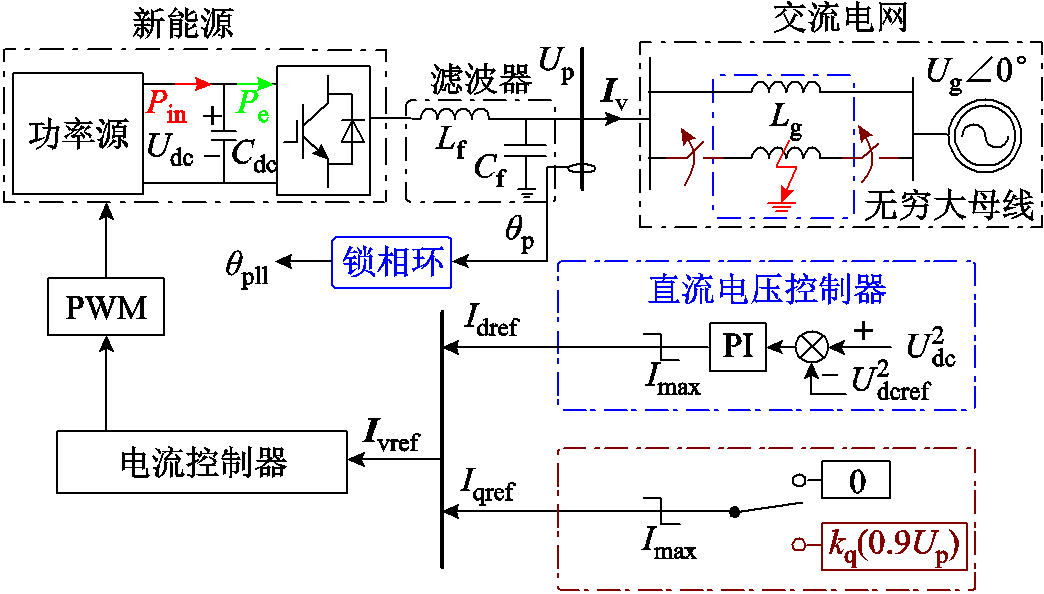
图1 新能源并网系统示意图
Fig.1 Schematic diagram of a grid-connected VSC
当电网发生故障时,忽略新能源机侧动态从而认为直流侧功率源发出的功率Pin恒定,此时新能源有功电流仍由式(1)决定,并依据电网导则提供无功电流以支撑电网电压[17],有
 (2)
(2)
式中,Ivq为新能源无功电流;Ivq0为新能源故障前的无功电流;Ivqf为新能源故障期间的无功电流;kq为无功增益系数。
通常,锁相环和内环电流控制器的带宽大于本文所关注的直流电压控制器。为简化分析,本文忽略锁相环和内环控制动态,即大扰动期间认为新能源发出的电流与内环指令值相同(Iv=Ivref),锁相环输出的相位与新能源并网点实际相位相同(θp=θpll)。值得注意的是,当锁相环控制带宽较窄时,暂态期间θp≠θpll,此时仍可忽略锁相环动态的影响,其合理性见附录第2节。此外,线路的电磁暂态过程远快于直流电压控制动态,因此本文忽略线路动态。
根据基尔霍夫电压定律列写如图1所示系统的电压和电流矢量关系为
 (3)
(3)
式中,Upd和Upq分别为VSC并网点电压d轴和q轴分量;Xg为线路电抗;Sv为基于系统容量标幺化的新能源设备容量。
由于d轴定向的矢量控制结构中Upq=0,从而新能源并网点的电压幅值可表示为
 (4)
(4)
因此,VSC发出的有功功率表达式为
 (5)
(5)
通常,定直流电压控制的VSC通过调节其发出的有功电流实现直流电压控制。当电网短路故障时,不平衡功率会引起直流电压变化,有
 (6)
(6)
式中, 为直流电压偏差,
为直流电压偏差, 。
。
结合式(1)和式(6),直流电压控制下的直流电压动态可表示为
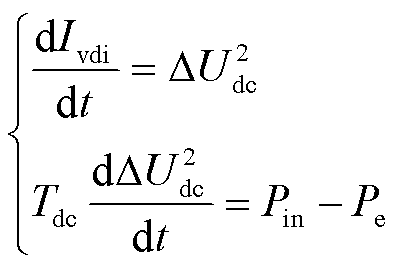 (7)
(7)
式中,Tdc为直流电容Cdc的充放电时间常数,数值上有Tdc=Cdc/2。
由式(3)可知,新能源并网点电压和新能源发出的有功和无功电流的矢量关系如图2所示。如图2a所示,由于Ug保持恒定,Up随着Ivd的增大而减小。由式(3)可知,矢量Up与jIvdXg垂直,因此矢量Up、Ug和jIvdXg所构成的直角三角形的面积可表示为
 (8)
(8)
式中,h为三角形的高,即h=(Xg/Ug)Pe。因此,h代表了新能源有功功率的大小Pe,从而Pe随着Ivd的增大先增大后减小。
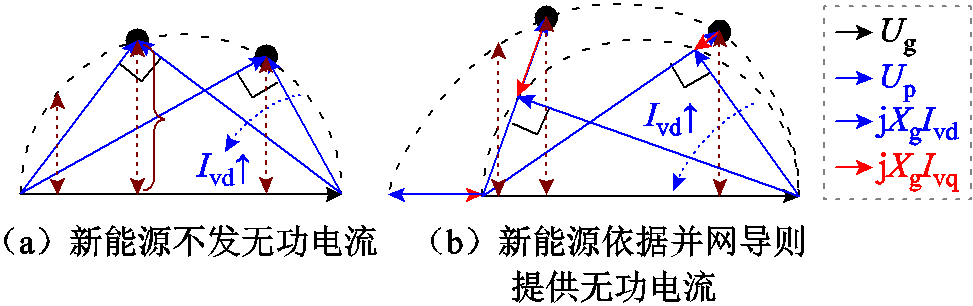
图2 新能源并网系统电压和电流矢量图
Fig.2 Voltage and current phasors of grid-connected VSC
比较图2a和图2b可知,新能源注入无功电流可使Up变大从而Pe相应变大,但Up随着Ivd的增大而减小,因此换流器发无功功率时Pe随着Ivd的增大先增大后减小的结论仍然成立。
为了得到系统故障前后不同运行阶段的上述有功功率和有功电流之间的非线性关系,将式(1)代入式(5)可得故障前稳态运行阶段的Pe0-Ivdi特性,有
 (9)
(9)
式中,Pe0为故障前新能源发出的有功功率。
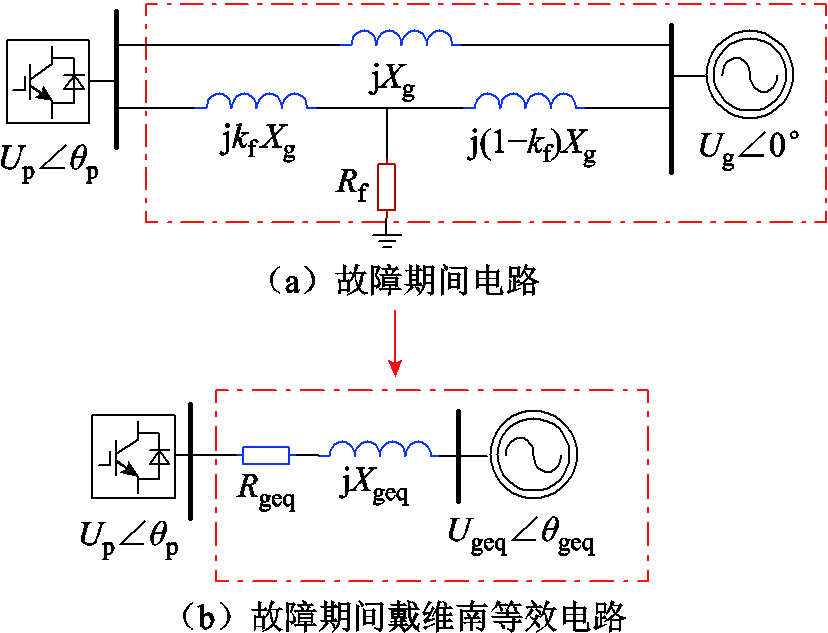
为了推导故障期间系统的Pe-Ivdi特性,建立图1所示系统的戴维南等效电路以简化分析,如附图1所示。故障期间系统戴维南等效阻抗和等效电网电压可表示为
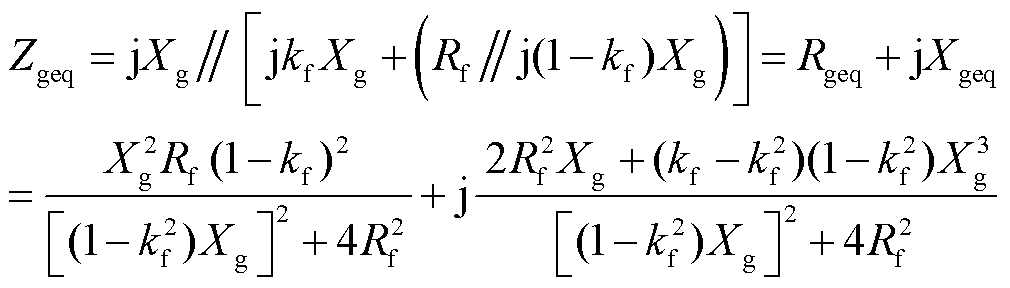 (10)
(10)
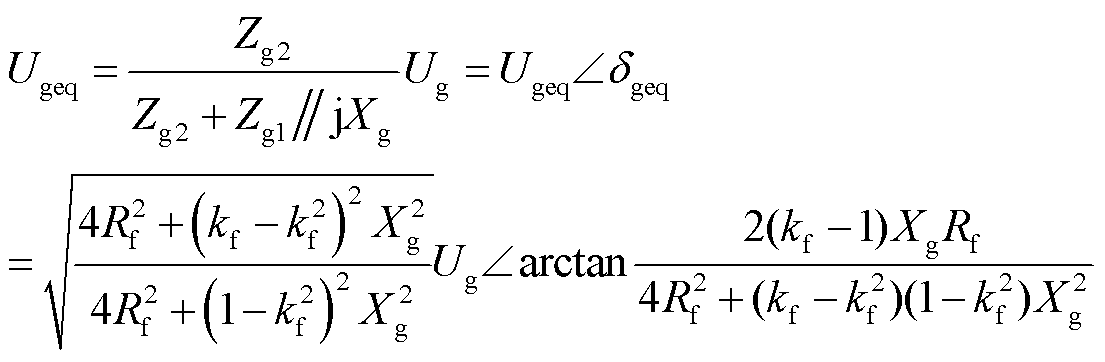 (11)
(11)
式中,Rgeq和Xgeq分别为电网等效电阻和等效电抗;Ugeq和θgeq分别为电网等效电压和等效相位;kf为故障位置和新能源并网点之间标幺化的距离,即0≤kf≤1(pu);Rf为故障阻抗;系统阻抗参数为Zg1=jXg+[kf(kf−1) ]/Rf,Zg2=jkfXg+Rf/(1−kf),Zg3= j(1−kf)Xg+Rf /kf。
]/Rf,Zg2=jkfXg+Rf/(1−kf),Zg3= j(1−kf)Xg+Rf /kf。
因此,结合式(4)、式(10)和式(11)可得故障期间新能源并网点电压幅值为
 (12)
(12)
式中,Upf为故障期间新能源并网点电压; 为电网等效阻抗,其模
为电网等效阻抗,其模 ;系数σ1、σ2和σ3分别为
;系数σ1、σ2和σ3分别为
 (13)
(13)
因此,结合式(5)、式(12)和式(13)可得故障期间VSC的Pef-Ivdi特性为
 (14)
(14)
式中,Pef为故障期间新能源发出的有功功率。
故障切除后系统恢复期间,在新能源控制延时的作用下无法及时切除低电压穿越控制[18],因此新能源并网点电压幅值及其Pepf-Ivdi特性可推导为
 (15)
(15)
式中,Uppf和Pepf分别为故障恢复期间新能源并网点电压幅值及新能源发出的有功功率。
根据式(9)、式(14)和式(15)可得系统不同阶段的Pe-Ivdi特性如图3所示。由图3可知,非线性的Pe-Ivdi特性随kq的增大而升高,且结合式(7)进行小扰动分析可知系统各阶段存在一个稳定平衡点(点a)和一个不稳定平衡点(点e)。
根据上述分析可知,VSC的Pe-Ivdi特性类似于同步机的功角特性,其中 类似于∆ω,Ivdi类似于功角。当故障期间直流侧注入功率高于电磁功率(Pin>Pe)时
类似于∆ω,Ivdi类似于功角。当故障期间直流侧注入功率高于电磁功率(Pin>Pe)时 ,直流电容开始充电,增大,类似于转子加速。因此,与传统电力系统中同步机暂态失稳过程类似,当故障期间直流电容累积能量过多时,故障清除后系统越过不稳定平衡点进入正反馈区域。此时新能源有功电流持续增大导致交流电压持续跌落,从而引发暂态电压失稳问题。
,直流电容开始充电,增大,类似于转子加速。因此,与传统电力系统中同步机暂态失稳过程类似,当故障期间直流电容累积能量过多时,故障清除后系统越过不稳定平衡点进入正反馈区域。此时新能源有功电流持续增大导致交流电压持续跌落,从而引发暂态电压失稳问题。
具体地,当系统发生故障时,新能源发出的有功功率跌落,导致。此时VSC有功电流增大导致并网点电压Up进一步跌落,且故障持续时间越长,Pe和Ivdi越大,Up越小,系统累积的电能( )越大。如图3所示,可用加速面积Sac刻画系统累积的电能,用减速面积Sdc刻画故障清除后系统耗散的电能。因此,当Sac>Sdc时,系统越过不稳定平衡点进入正反馈区域,有功电流持续增大,电压持续跌落导致系统暂态电压失稳。
)越大。如图3所示,可用加速面积Sac刻画系统累积的电能,用减速面积Sdc刻画故障清除后系统耗散的电能。因此,当Sac>Sdc时,系统越过不稳定平衡点进入正反馈区域,有功电流持续增大,电压持续跌落导致系统暂态电压失稳。
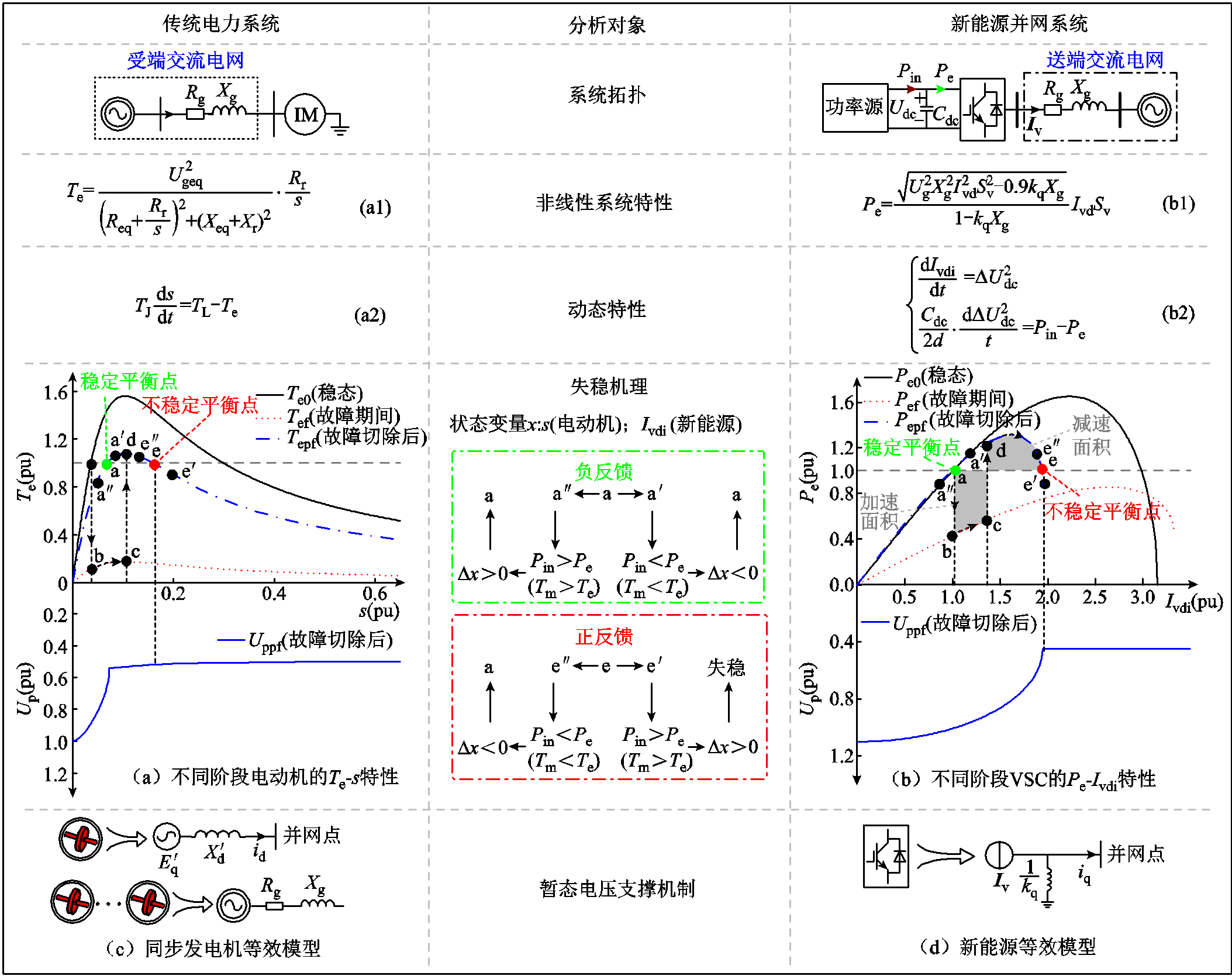
图3 传统电力系统与新能源并网系统暂态电压失稳机理对比
Fig.3 Comparison of transient voltage instability mechanisms between traditional power system and grid-connected VSC
值得注意的是,本文所关注的新能源的暂态电压失稳机理与传统电力系统中感应电动机的暂态电压失稳机理类似[19]。如图3中式(a1)和式(b1)所示,新能源并网系统与电动机并网系统均具有非线性的系统特性,且结合式(a2)和式(b2)所示动态特性可知,两系统均具有一个稳定平衡点和一个不稳定平衡点。如图3a所示,当电网故障时,在不平衡转矩的作用下电动机转速降低(转差率s增大),故障切除时系统越过不稳定平衡点将导致电动机转速持续降低直至堵转,并吸收大量无功功率导致交流电压持续跌落引发电压失稳问题。因此,传统电力系统的暂态电压失稳与本文所关注的新能源并网系统的暂态电压失稳机理类似,均是在大扰动下系统越过不稳定平衡点导致状态变量失控,进而引发系统输出变量(电压)持续跌落并造成电压失稳。
由图2可知,无功功率作为影响暂态电压稳定性的主要因素,在分析系统暂态电压失稳机理时还应关注系统中无功源的暂态电压支撑机制。如图3c所示,传统电力系统中的主要无功源为同步发电机,其在暂态电压稳定的时间尺度可等效为暂态内电势 串联暂态电抗
串联暂态电抗 。为便于分析,通常可将多台同步机及电网连接阻抗等效为无穷大电网串联等效阻抗以表征其对电动机的电压支撑作用。此时,与等效阻抗成反比的电网强度越大,系统暂态电压支撑能力越强。如图3d所示,新能源暂态期间可等效为恒流源(Iv=−0.9kq)并联虚拟电感(1/kq)[18],即kq越大,恒流源越大且虚拟电感越小,新能源暂态电压支撑能力越强。综上所述,后文在分析系统的暂态电压稳定性时均以电网等效电抗Xg与新能源无功增益kq为主要参数刻画系统暂态电压的稳定边界。
。为便于分析,通常可将多台同步机及电网连接阻抗等效为无穷大电网串联等效阻抗以表征其对电动机的电压支撑作用。此时,与等效阻抗成反比的电网强度越大,系统暂态电压支撑能力越强。如图3d所示,新能源暂态期间可等效为恒流源(Iv=−0.9kq)并联虚拟电感(1/kq)[18],即kq越大,恒流源越大且虚拟电感越小,新能源暂态电压支撑能力越强。综上所述,后文在分析系统的暂态电压稳定性时均以电网等效电抗Xg与新能源无功增益kq为主要参数刻画系统暂态电压的稳定边界。
考虑到故障后暂态期间换流器同样面临两种暂态同步稳定问题:①在锁相环动态主导下系统越过不稳定平衡点[20-21];②系统故障恢复期间平衡点缺失[22-23]。其中,第①类同步稳定问题可通过对锁相环输出的角频率进行限幅以避免[24],因此本文在关注暂态电压稳定的同时还应考虑第②类同步稳定问题。为了论证本文所关注的暂态电压稳定问题的主导性,分别量化系统的暂态电压稳定和暂态同步稳定边界。
由式(3)可推得Upq=0成立时系统满足
 (16)
(16)
由于暂态期间锁相环存在平衡点需保证式(16)有解,考虑到−1≤sinθp≤1,因此暂态同步稳定约束下VSC的最大有功电流 为
为
 (17)
(17)
令式(15)中Pepf=Pin即可得故障恢复期间VSC直流电压外环动态决定的系统不稳定平衡点对应的VSC有功电流,即暂态电压稳定约束下VSC的最大有功电流的表达式为
 (18)
(18)
其中
 (19)
(19)
式中,Ivdumax为直流电压控制的新能源并网系统不稳定平衡点对应的VSC有功电流。
由上述分析可知,故障期间暂态同步稳定性和暂态电压稳定性同时决定系统的稳定边界,且均可以由故障恢复期间VSC的最大有功电流表征。因此通过比较两种稳定约束下VSC最大有功电流的大小即可确定暂态期间系统的稳定边界与两种稳定约束之间的关系。
为了清晰地比较两种暂态稳定边界的主导性,可由式(9)、式(14)~式(16)得到系统的Pe-Ivd-θp特性曲线如图4所示。
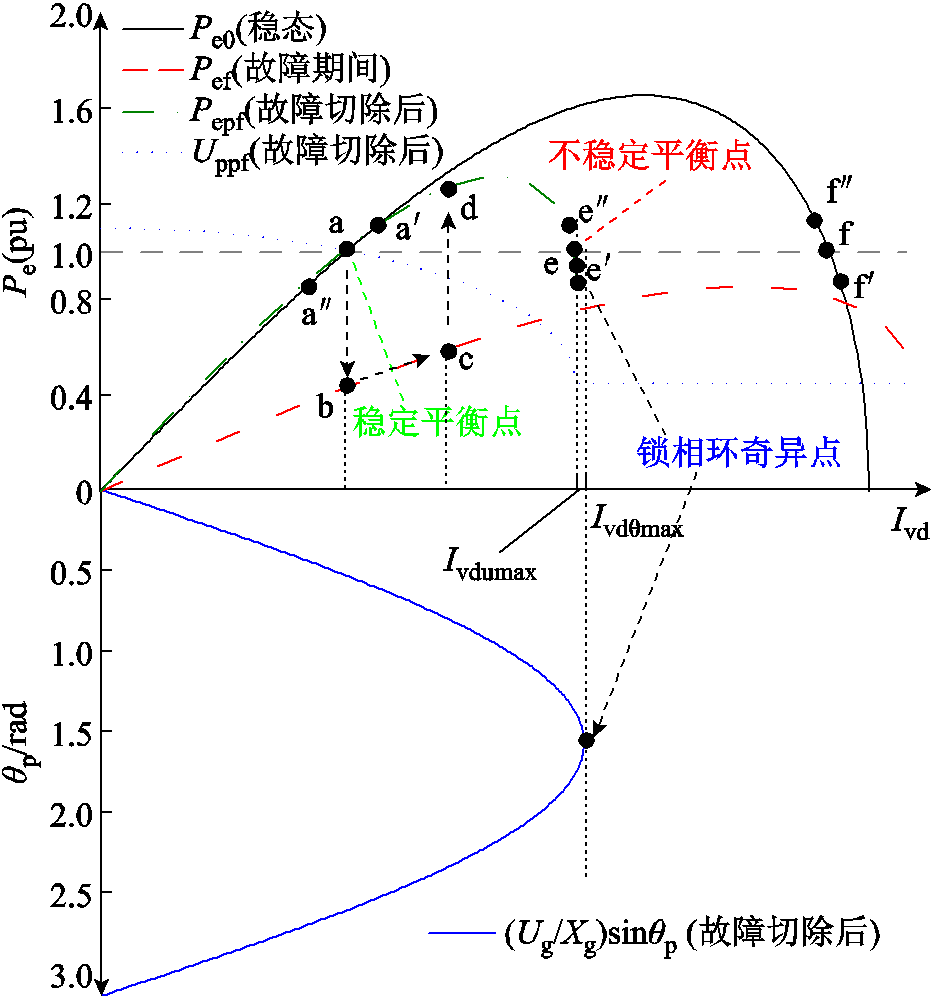
图4 VSC的Pe-Ivd-θp特性曲线
Fig.4 Pe-Ivd-θp characteristic curves of VSC
由于当VSC的有功电流Ivd=Ivdumax时,VSC电磁功率Pe等于其直流侧有功Pin,即Pe(Ivdumax)=Pin,因此,当锁相环决定的吸引域对应的最大有功电流Ivdθmax<Ivdumax时,Pe(Ivdθmax)>Pin,即此时暂态同步稳定主导系统的暂态稳定边界;而当Ivdθmax>Ivdumax时,Pe(Ivdθmax)<Pin,即此时暂态电压稳定主导系统的暂态稳定边界。综上所述,可定义暂态稳定主导因子μ为
 (20)
(20)
式中,无穷大电网电压Ug暂态期间保持不变,直流侧功率源注入功率Pin始终保持1(pu)。因此,系统暂态稳定的主导性仅与电网强度和无功增益有关。
根据式(20)可得不同参数下系统暂态稳定的主导性,如图5所示。当电网强度较大且无功增益kq较大时μ>0,此时Pe(Ivdumax)>Pin,Ivdθmax<Ivdumax,系统故障恢复期间先达到暂态同步稳定边界,即更容易暂态同步失稳;当电网强度较小(Xg较大)且无功增益kq较小时,μ<0,此时Pe(Ivdθmax)<Pin,Ivdθmax>Ivdumax,即系统更容易暂态电压失稳。
通常,低电压穿越期间VSC的无功增益系数kq=1.5(pu)[17],因此当电网较强(Xg<0.26)时由暂态同步稳定主导,电网较弱(Xg>0.26)时由暂态电压稳定主导。然而,当电网较强时系统的暂态稳定裕度通常较大,此时系统暂态稳定问题并不突出,因此应主要关注弱电网中主导的暂态电压稳定问题。
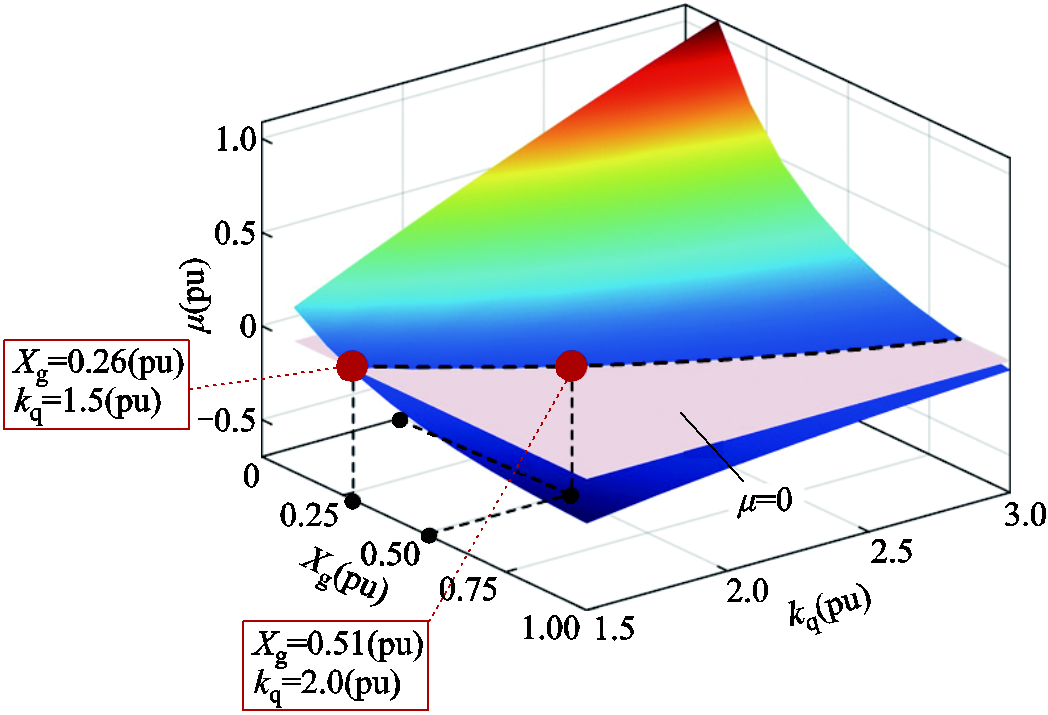
图5 不同参数下VSC暂态稳定主导性
Fig.5 Transient stability dominance of VSCs under various parameters
由图3可知,传统电力系统中感应电动机的暂态电压稳定问题主要由非线性的转矩-转速特性及一阶转子运动方程决定,此时只需判断故障清除时刻系统是否越过不稳定平衡点即可判断系统的暂态稳定性[1]。然而,对于新型电力系统中新能源机组的暂态电压稳定问题,主要是由图3b所示的功率和有功电流之间的非线性关系,以及式(7)所示VSC的直流电压动态决定。考虑到二阶直流电压动态类似于同步机的转子动态,因此系统暂态电压稳定的边界必须通过等面积定则确定。
由式(12)~式(14)所示故障期间VSC的Pef-Ivdi特性可得系统的加速面积为
 (21)
(21)
式中,Ivdi0为故障前Ivdi的初值;Ivdicl为故障切除时刻Ivdi的值。
类似地,可由式(15)所示故障恢复期间VSC的Pepf-Ivdi特性求得系统的减速面积 为
为
 (22)
(22)
结合式(7)~式(15)、式(21)和式(22),可基于等面积定则(Sac=Sdemax)数值求解系统暂态电压稳定对应的临界切除时间(Critical Clearance Time, CCT)。因此,所得CCT可作为量化系统暂态电压稳定边界的指标,系统的CCT越大表明系统的暂态电压稳定裕度越高。
基于所提指标,探究了不同电网强度和新能源无功增益kq下系统的暂态电压稳定边界,计算结果如图6所示。随着Xg的减小,电网强度变高,相同有功电流下新能源发出的有功功率增大。此外,增大kq可使新能源暂态期间向系统注入更多的无功功率,Up升高,从而新能源暂态期间可发出更多的有功功率。因此,减小Xg或增大kq均可使系统的Pe-Ivdi特性曲线变高,此时系统加速面积减小,减速面积增大,有利于暂态电压稳定。
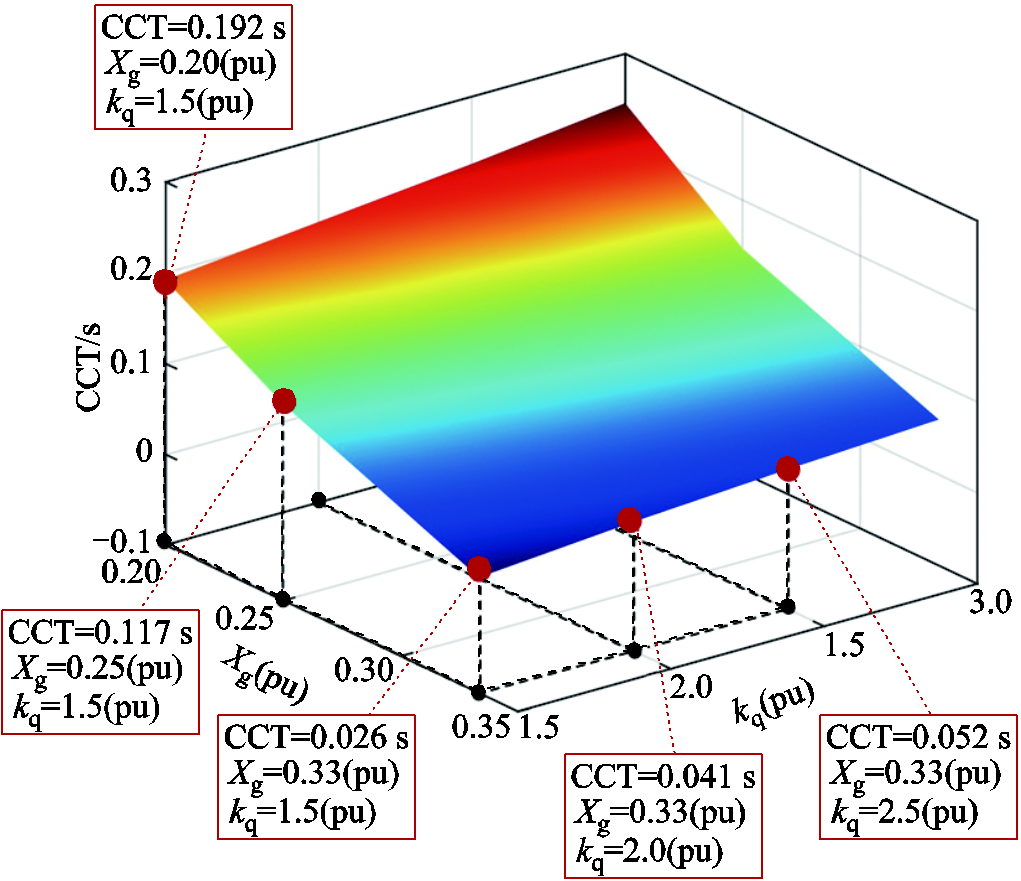
图6 不同Xg和kq下VSC暂态电压稳定性
Fig.6 Transient voltage stability of VSCs under different Xg and kq
为探究系统暂态电压稳定裕度与直流电压外环控制器的比例和积分增益之间的关系,基于式(9)、式(14)、式(15)得到在不同比例和积分增益下系统的Pe-Ivdi特性,如图7所示。当新能源发出的功率达到新能源并网系统的功率极限Pemax时,VSC相应发出的有功电流Ivdmax=kidcIvdimax +kpdcIvdpmax,且当kpdc和kidc变化时,Ivdmax及Pemax为定值。因此,不同比例和积分增益下Pe-Ivdi曲线顶点(Ivdimax, Pemax)仅有横坐标发生变化。由于故障期间Pe<Pin,直流电压升高,Ivdp和Ivdi均增大,此时增大kpdc和kidc将导致Ivdimax和Ivdpmax均减小,Pef-Ivdi曲线左移,系统加速面积减小。在故障恢复期间,Pe>Pin,直流电压降低,即Ivdp减小Ivdi增大且Ivdp将逐渐减小为负数,此时Ivdimax将随着kpdc的增大而增大,导致Pepf-Ivdi曲线右移,系统减速面积增大。由于直流电压控制外环带宽较窄,kpdc通常远小于kidc,因此在分析kidc的影响时可忽略kpdc的影响,即Ivdmax= kidcIvdimax,此时Ivdimax将随着kidc的增大而减小,Pepf-Ivdi曲线左移,系统减速面积减小。
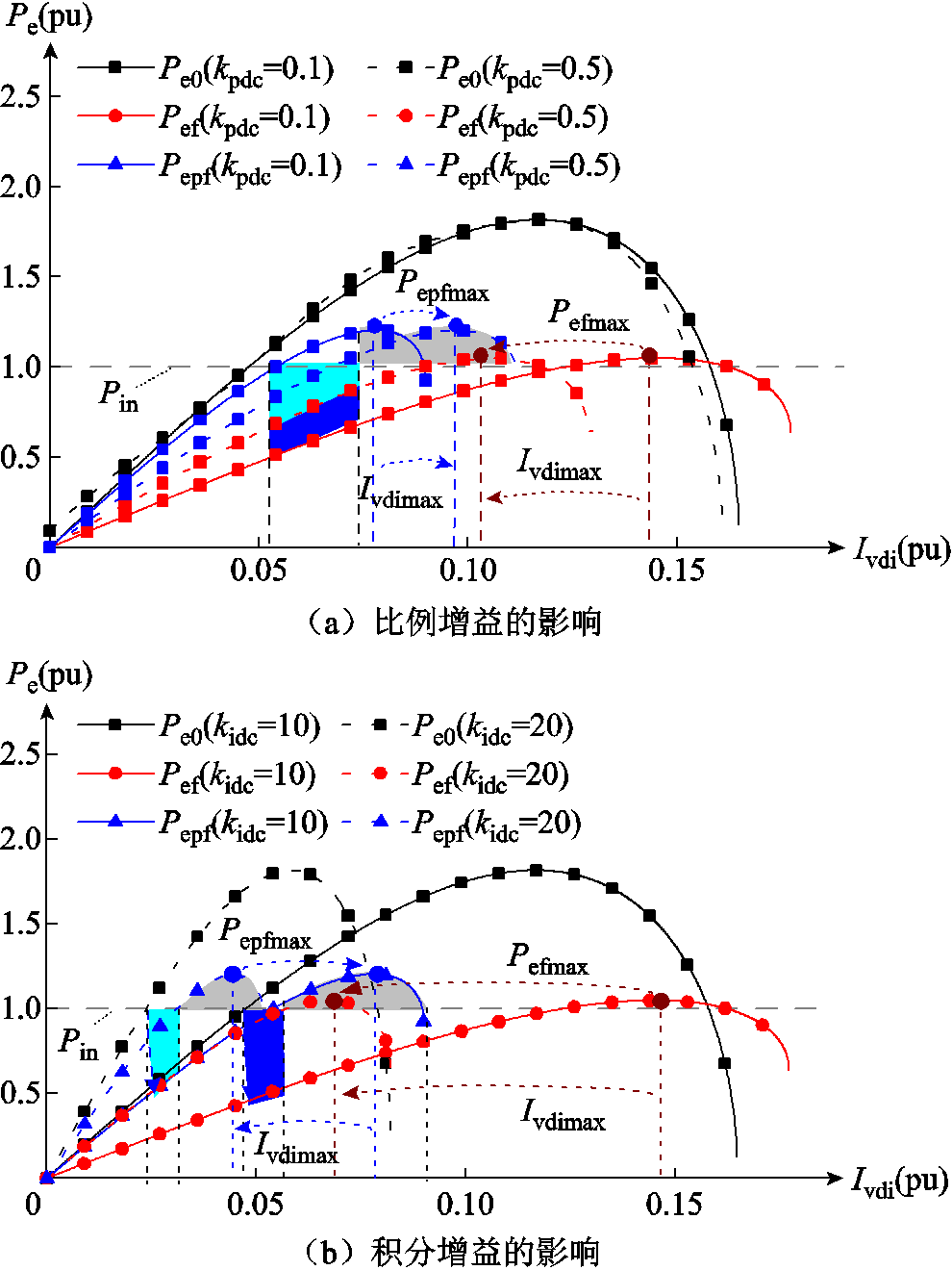
图7 不同直流电压控制参数下VSC暂态电压稳定性
Fig.7 Transient voltage stability of VSCs under different control parameters of DC voltage controller
综上所述,增大kpdc有利于系统暂态电压稳定性,由于故障恢复期间Ivdi大于故障期间的Ivdi,因此故障恢复期间kidc影响更大,即增大kidc将导致系统暂态电压稳定裕度减小。以上结论的物理本质在于:增大kpdc可提高新能源响应不平衡功率的能力从而提供额外的制动作用,然而直流电压外环积分环节的固有响应滞后,无法在故障恢复的较短时间内及时响应,因此增大积分增益会导致系统减速面积减小,从而恶化系统暂态电压稳定性。值得注意的是,一味增大kpdc可能会恶化系统的小扰动稳定性[25],因此应综合考虑新能源并网系统不同安全稳定性约束后确定新能源控制参数合理的取值范围。
基于电磁暂态仿真平台PSCAD搭建了如图1所示单新能源场站接入等值无穷大系统作为本文的测试系统,其仿真系统参数见附表1。本节首先阐明了系统暂态电压失稳过程,验证了所提暂态电压失稳机理的正确性;其次探究了不同电网强度、控制参数等因素对系统暂态电压稳定性的影响,并在不同系统参数下验证了所提稳定裕度量化方法和暂态稳定主导性分析结论的正确性。
在t=6 s于一回线路中间施加三相接地故障,接地电阻Rf =10 Ω,并于t=6.03 s切除故障线路,时域仿真结果如图8中黑色曲线所示。
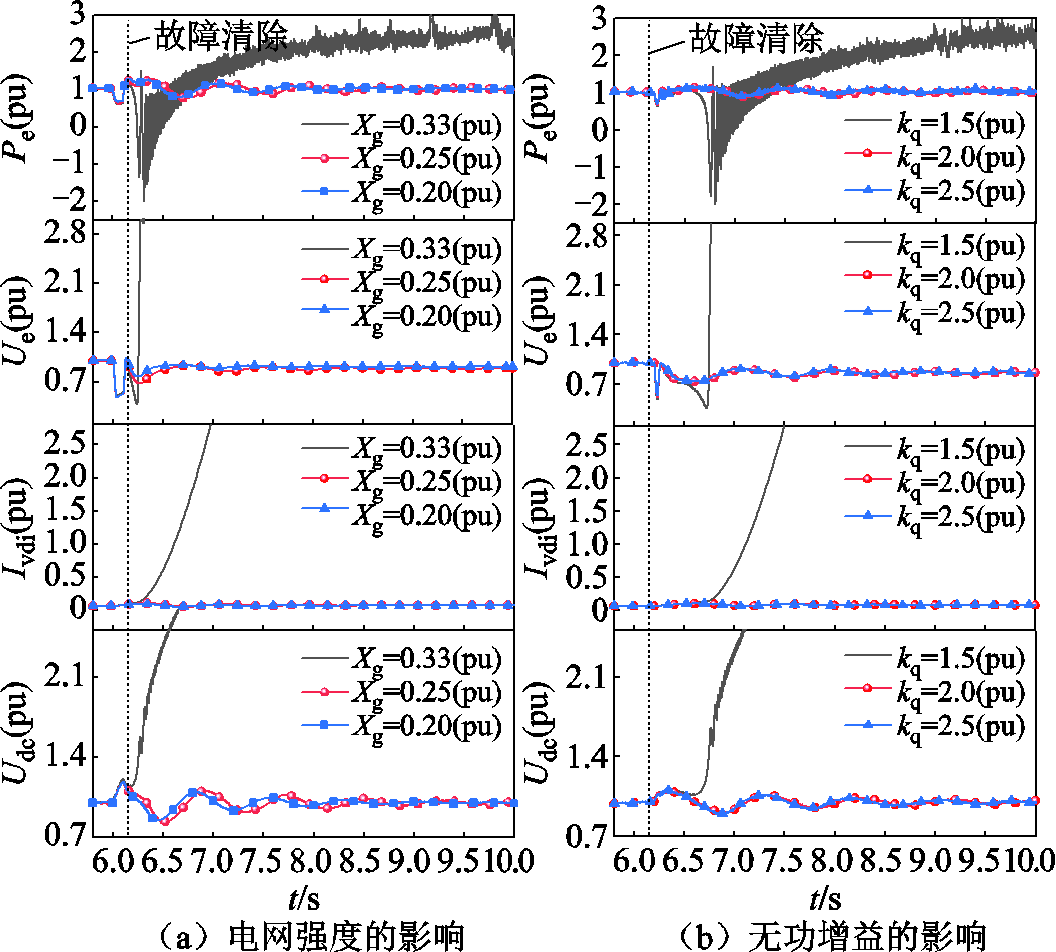
图8 不同电网强度和无功增益下的暂态电压稳定性
Fig.8 Transient voltage stability under various grid strengths and reactive power gains
可以看出,故障期间新能源并网点电压Up跌落,新能源有功功率降低,在不平衡功率驱动下的直流电压和有功电流积分分量Ivdi均增大直至故障切除。故障切除后,有功功率恢复从而直流电压开始降低,此时由于直流电压仍高于1(pu),因此Ivdi继续增大。受外环带宽限制,通常kpdc kidc,因此有功电流随Ivdi增大而增大,导致交流电压跌落。当系统越过电压稳定边界Ivdumax时,有功电流持续增大,交流电压持续跌落,此时系统处于电压失稳状态。上述现象与第1节分析一致,验证了所提失稳机理的正确性。
kidc,因此有功电流随Ivdi增大而增大,导致交流电压跌落。当系统越过电压稳定边界Ivdumax时,有功电流持续增大,交流电压持续跌落,此时系统处于电压失稳状态。上述现象与第1节分析一致,验证了所提失稳机理的正确性。
提升电网强度(1/Xg)前后的时域仿真结果如图8a所示。随着电网强度提升(Xg减小),新能源暂态期间可发的有功功率更大,系统故障期间的不平衡功率较小且故障恢复期间制动转矩较大,可防止状态变量Ivdi越过电压稳定边界,保证了系统的暂态电压稳定。仿真结果验证了图6所示量化结果的准确性。
增大新能源低电压穿越期间的无功增益kq后的时域仿真结果如图8b所示。kq=1.5(pu)且故障持续时间为0.03 s时系统暂态电压失稳,而kq=2(pu)和kq=2.5(pu)时系统暂态电压稳定,与图7所示理论计算结果一致。
不同直流电压外环控制参数下系统暂态电压稳定性如图9所示。随着比例增益kpdc的增大,系统暂态电压稳定性得到改善,而增大积分增益kidc将恶化系统暂态电压稳定性。
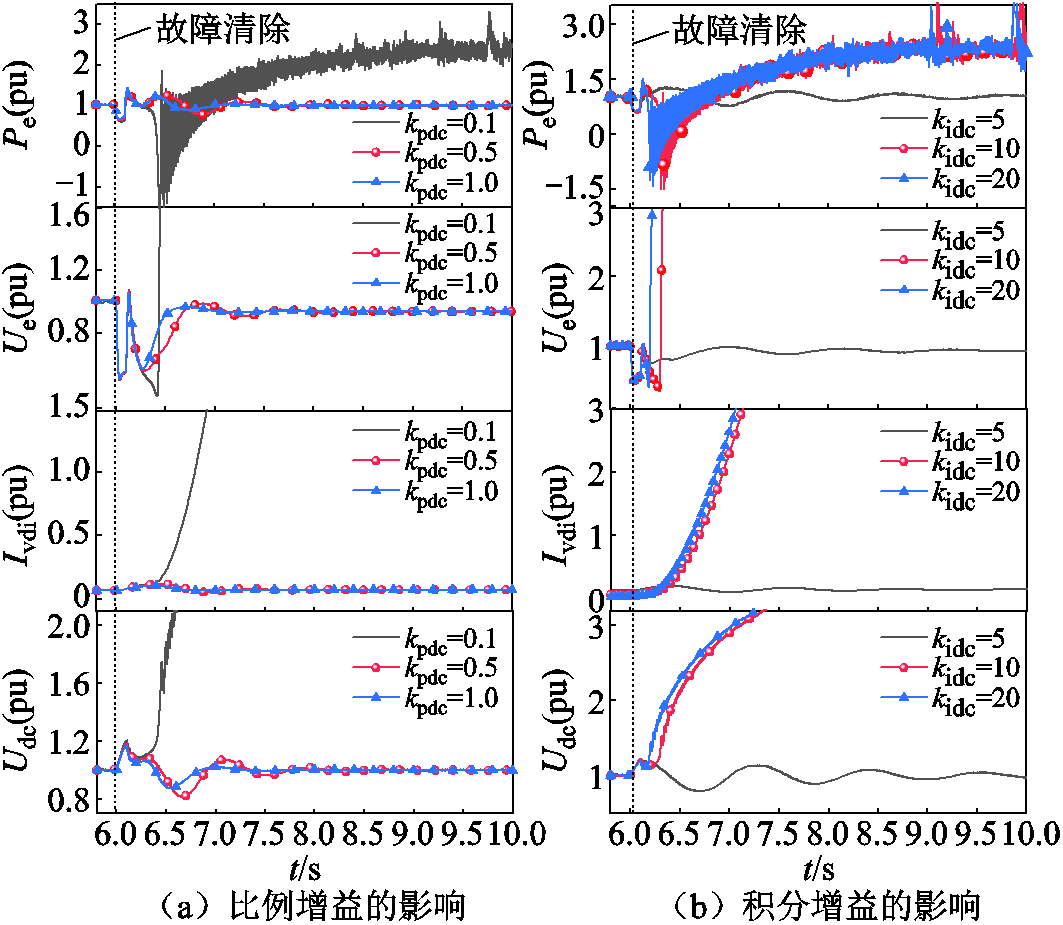
图9 不同外环控制参数下的暂态电压稳定性
Fig.9 Transient voltage stability under various DC voltage control parameters
为验证所提暂态同步稳定性和暂态电压稳定性主导性结论的正确性,现基于附表1中系统参数进行仿真计算,得到不同电网强度下系统各电气量的时域波形如图10所示。
当Xg=0.66(pu)且换流器无功增益kq=2.0(pu)时,基于式(20)可得暂态稳定主导因子μ=−0.17<0,即此时暂态电压稳定性主导系统暂态稳定边界。如图10a所示,此时系统先越过暂态电压稳定边界,换流器直流电压和有功电流持续增大,导致系统交流电压持续跌落,系统暂态电压失稳,失稳后的时域波形如图10a中阶段Ⅰ绿色区域所示。值得注意的是,随着有功电流持续增大并越过暂态同步稳定边界,系统最终呈现暂态电压失稳与暂态同步失稳的耦合失稳形态,耦合失稳的时域波形如图10a中阶段Ⅱ灰色区域所示。
当Xg=0.33(pu)且换流器无功增益kq=2.0(pu)时,μ=0.14>0,即此时暂态同步稳定性主导系统暂态稳定边界。如图10b所示,系统先越过同步稳定边界并呈现暂态同步失稳形态,如图10b中灰色区域所示。由图4的理论分析可知,系统运行至暂态电压稳定边界时Pe=1(pu),而此时系统越过暂态同步稳定边界时换流器功率Pe>1(pu),因此该工况下系统先越过暂态同步稳定边界,进一步验证了所提暂态稳定主导因子的有效性。
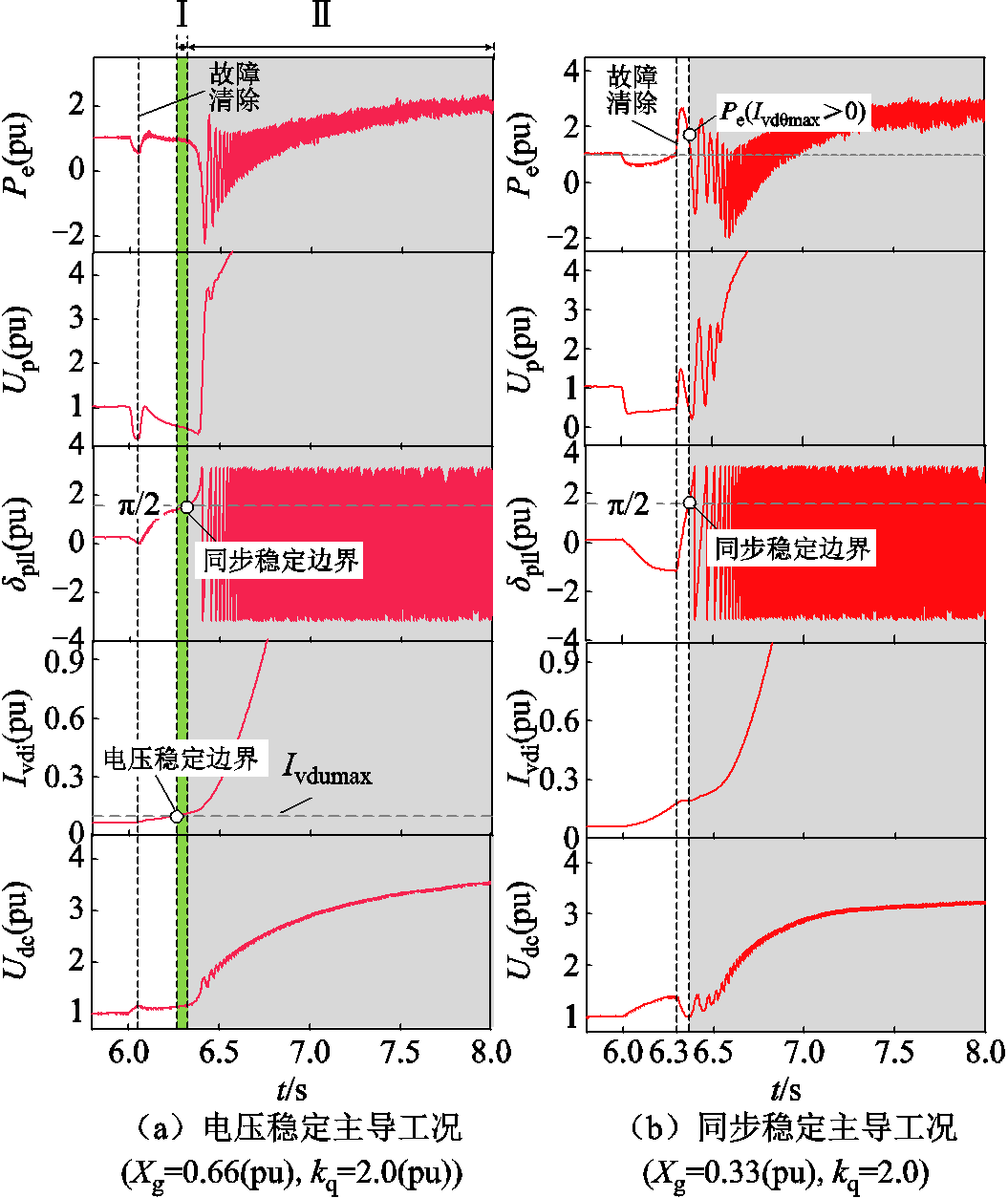
图10 不同电网强度下的暂态电压稳定主导性
Fig.10 Transient voltage stability dominance under various grid strengths
本文揭示了直流电压控制下新能源并网系统的暂态电压失稳机理,论证了弱电网中暂态电压稳定性主导系统暂态稳定边界的合理性。主要结论如下:
1)故障期间的不平衡功率可导致直流电压控制下的新能源机组越过不稳定平衡点,从而导致其有功电流持续增大,交流电压持续跌落,从而引发新能源并网系统暂态电压失稳问题。
2)电网强度越高、新能源无功增益越大时,系统暂态期间不平衡功率越小,有功电流增长速度较慢,系统暂态电压稳定裕度变大。增大新能源直流电压外环的比例增益可提高系统响应不平衡功率的能力,从而提供额外的制动作用。然而直流电压外环的积分环节具有滞后作用,增大积分增益会导致减速面积减小,从而恶化系统暂态电压稳定性。
3)新能源并网系统同时面临暂态同步失稳和暂态电压失稳风险,对于本文关注的单新能源场站并网系统,当电网较弱且新能源的无功支撑不足时,应主要关注系统的暂态电压稳定问题。
在未来的研究工作中,一方面,对于同时包含不同类型新能源装备及直流换流站等异构可控对象的复杂场景,应综合考虑装备间的动态交互作用对系统暂态电压稳定性的影响,从而拓宽本文所提机理和分析方法的适用场景;另一方面,需要通过改进新能源故障期间和故障恢复期间的控制结构及控制策略,以提高系统的暂态电压稳定性。
附 录
1. 系统等效电路及仿真参数
附图1 新能源并网系统戴维南等效电路
App.Fig.1 Thevenin equivalent circuit of grid-connected VSC
附表1 仿真系统参数
App.Tab.1 Parameters of the simulation system
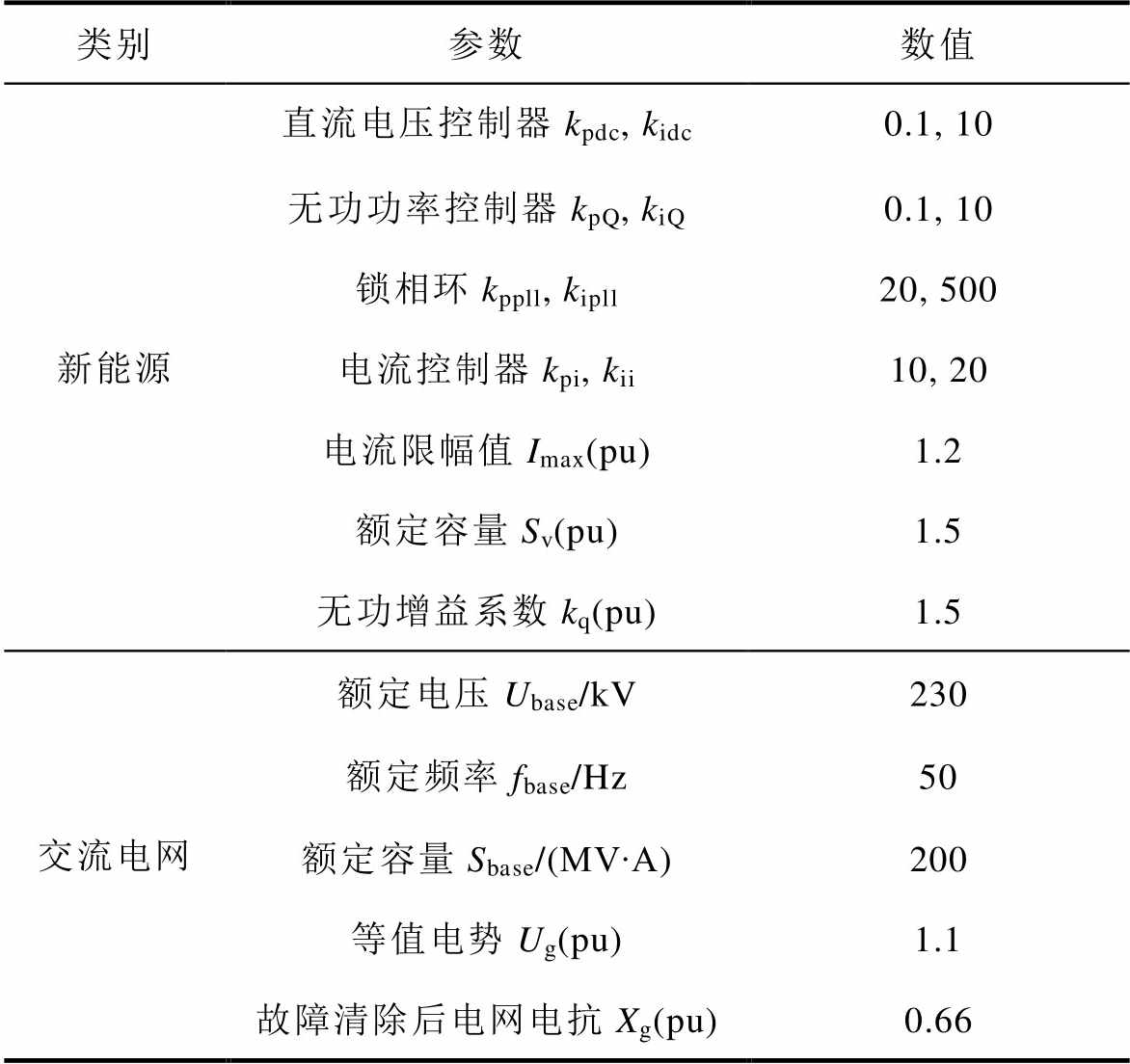
类别参数数值新能源直流电压控制器kpdc, kidc0.1, 10无功功率控制器kpQ, kiQ0.1, 10锁相环kppll, kipll20, 500电流控制器kpi, kii10, 20电流限幅值Imax(pu)1.2额定容量Sv(pu)1.5无功增益系数kq(pu)1.5交流电网额定电压Ubase/kV230额定频率fbase/Hz50额定容量Sbase/(MV∙A)200等值电势Ug(pu)1.1故障清除后电网电抗Xg(pu)0.66
2. 忽略锁相环动态合理性分析
当电网发生故障时,锁相环在有限的控制带宽下无法完全跟踪并网点电压的实际相位,因此分析新能源的暂态电压稳定性时应考虑暂态期间PLL动态的影响。
考虑PLL动态后(Upq≠0),系统的电压和电流矢量关系为
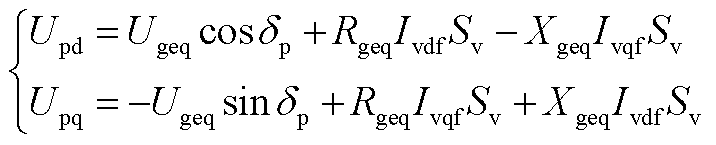 (A1)
(A1)
式中,δp为锁相环输出相位。
将式(A1)代入文中式(2)中可得新能源故障穿越期间发出的无功电流为
 (A2)
(A2)
式中,Ivqf为Ivdf与δp的函数; 与
与 的表达式为
的表达式为
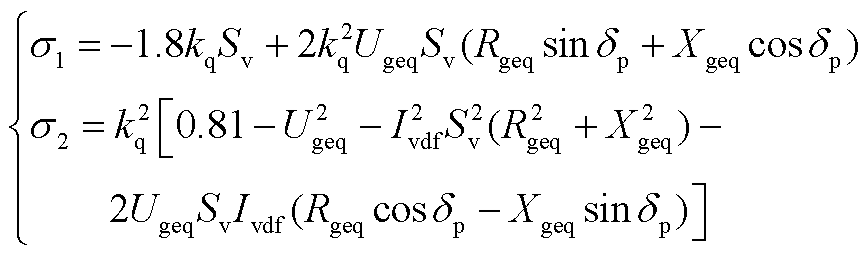 (A3)
(A3)
结合式(A2)和式(A3)可得故障期间VSC的Pef-Ivdi特性为
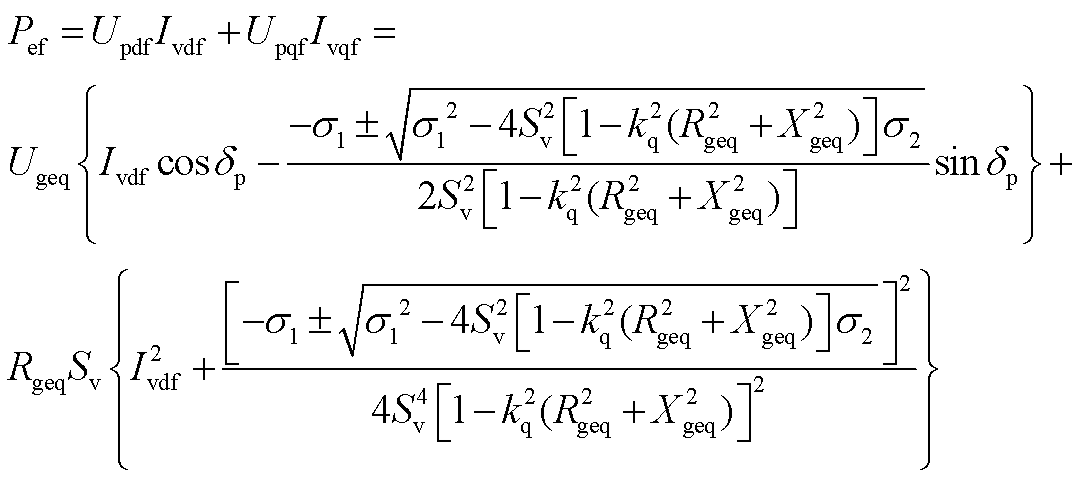 (A4)
(A4)
为了准确刻画Pef-Ivdi特性,结合PLL动态和直流电压外环控制动态求解δp为
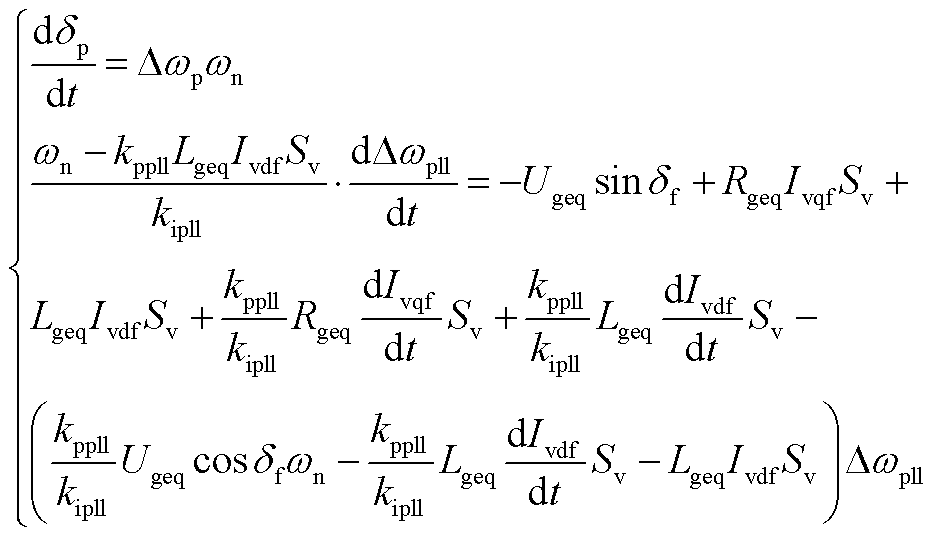 (A5)
(A5)
式中,kppll和kipll分别为锁相环的比例和积分增益; 为系统额定角频率;
为系统额定角频率; 为锁相环输出角频率和系统额定角频率的偏差;
为锁相环输出角频率和系统额定角频率的偏差; 为戴维南等效线路电感。
为戴维南等效线路电感。
由于式(A5)所示非线性微分代数方程组无法解析求解,因此可通过数值求解的方式得到考虑PLL动态后VSC的Pe-Ivdi特性,如附图2所示。
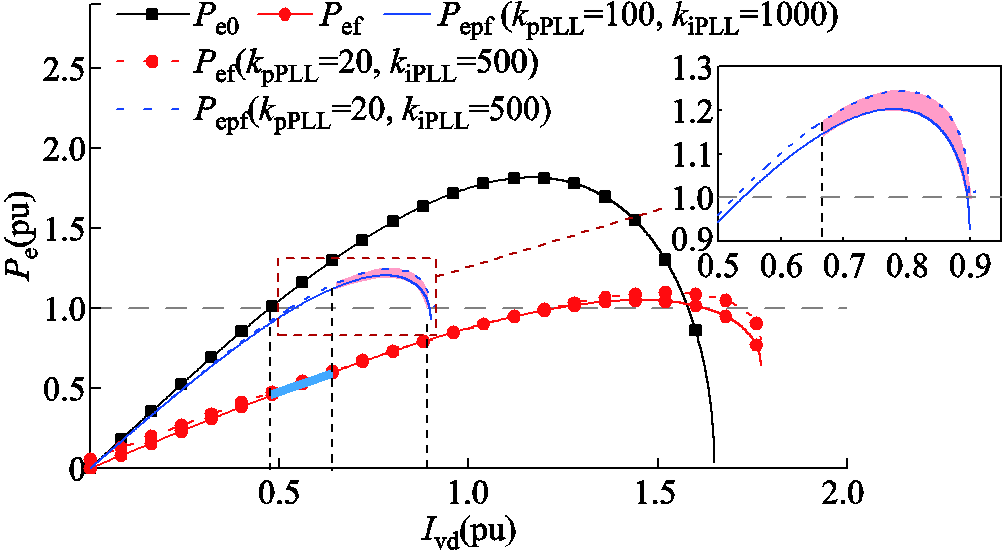
附图2 考虑PLL动态后的Pe-Ivdi特性
App.Fig.2 The Pe-Ivdi characteristics after considering PLL dynamics
如附图2所示,随着PLL带宽变窄(kppll=20,kipll=500),加速面积几乎不变而减速面积增大,即系统暂态电压稳定性随PLL带宽变窄而提升。为进一步验证所得结论的有效性,基于时域仿真得到了不同PLL控制带宽下系统的时域波形如附图3所示。由附图3可知,当锁相环控制带宽较窄时,系统故障恢复期间的有功功率较大,可提供较大的制动转矩,从而改善系统的暂态电压稳定性,验证了附图2所得结论的有效性。
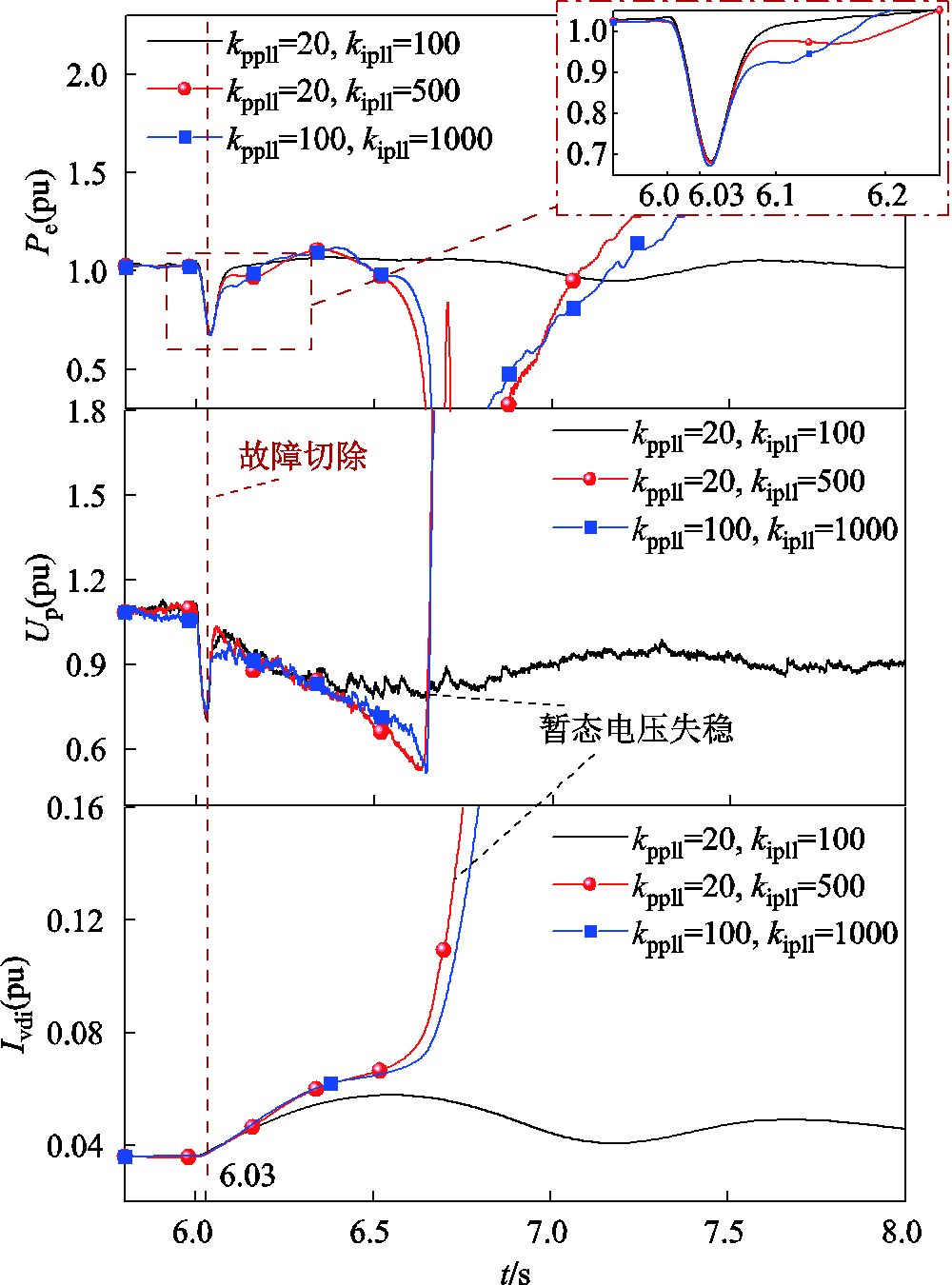
附图3 不同PLL控制带宽下的时域仿真结果
App.Fig.3 Simulation results under different PLL control bandwidths
综上所述,当考虑PLL动态时,故障恢复期间VSC有功功率有所提升,从而改善了系统的暂态电压稳定性。由于本文忽略了PLL动态(认为PLL带宽足够宽),因此所得分析结果偏保守。此外,PLL的锁相偏差对VSC的功率特性影响有限,因此从阐释机理的角度出发,本文仅考虑对系统暂态电压稳定性起主导作用的直流电压动态及直流电压外环动态。
参考文献
[1] 王晓辉, 党崇阳, 刘峻宇, 等. 功率因数映射负荷正反馈不稳定域的暂态电压失稳判别[J]. 电工技术学报, 2025, 40(17): 5476-5486.
Wang Xiaohui, Dang Chongyang, Liu Junyu, et al. Transient voltage instability identification based on positive-feedback unstable region mapped by power factor during load dynamics[J]. Transactions of China Electrotechnical Society, 2025, 40(17): 5476-5486.
[2] 叶萌, 谭锡林. 基于实时分类负荷模型的受端电网电压稳定问题研究[J]. 电气技术, 2019, 20(1): 53-57.
Ye Meng, Tan Xilin. Voltage stability research of receiving-end network based on real-time classification load model[J]. Electrical Engineering, 2019, 20(1): 53-57.
[3] Machowski J, Bialek J W, Bumby J R. Power System Dynamics. Stability and Control[M]. 2nd ed. New York: Wiley, 2012.
[4] PACworld. Blackout watch – Issue 056 June 2021. [EB/OL]. [2025-03-22]. https://www.pacw.org/blackout-watch-issue-056-june-2021.
[5] 杨金洲, 李业成, 熊鸿韬, 等. 新能源接入的受端电网暂态电压失稳高风险故障快速筛选[J]. 电工技术学报, 2024, 39(21): 6746-6758.
Yang Jinzhou, Li Yecheng, Xiong Hongtao, et al. A fast screening method for the high-risk faults with transient voltage instability in receiving-end power grids interconnected with new energy[J]. Transactions of China Electrotechnical Society, 2024, 39(21): 6746-6758.
[6] Chen Junru, Milano F, O’Donnell T. Assessment of grid-feeding converter voltage stability[J]. IEEE Transactions on Power Systems, 2019, 34(5): 3980-3982.
[7] 王奕鑫, 唐宇, 叶琳, 等. 多馈入直流系统电压稳定中静态负荷影响的定量分析和评估方法[J]. 电工技术学报, 2024, 39(23): 7379-7393.
Wang Yixin, Tang Yu, Ye Lin, et al. Quantitative analysis and evaluation method for the impact of static loads on voltage stability in multi-infeed direct current systems[J]. Transactions of China Electrotechnical Society, 2024, 39(23): 7379-7393.
[8] 徐艳春, 蒋伟俊, 孙思涵, 等. 含高渗透率风电的配电网暂态电压量化评估方法[J]. 中国电力, 2022, 55(7): 152-162.
Xu Yanchun, Jiang Weijun, Sun Sihan, et al. Quantitative assessment method for transient voltage of distribution network with high-penetration wind power[J]. Electric Power, 2022, 55(7): 152-162.
[9] 徐艳春, 蒋伟俊, 汪平, 等. 考虑暂态电压稳定的含高渗透率风光的电网动态无功规划方法[J]. 电力自动化设备, 2022, 42(8): 79-88.
Xu Yanchun, Jiang Weijun, Wang Ping, et al. Dynamic reactive power planning method for power grid with high permeability wind power and photovoltaic considering transient voltage stability[J]. Electric Power Automation Equipment, 2022, 42(8): 79-88.
[10] Xu Yan, Dong Zhao Yang, Meng Ke, et al. Multi-objective dynamic VAR planning against short-term voltage instability using a decomposition-based evolutionary algorithm[J]. IEEE Transactions on Power Systems, 2014, 29(6): 2813-2822.
[11] 郑乐, 胡伟, 闵勇, 等. 基于临界转变理论的电力系统电压稳定分析与预警[J]. 中国电机工程学报, 2016, 36(24): 6820-6827, 6937.
Zheng Le, Hu Wei, Min Yong, et al. Research on power systems voltage stability assessment and prediction based on critical transition[J]. Proceedings of the CSEE, 2016, 36(24): 6820-6827, 6937.
[12] 高金. 基于Dpeak等值建模的风电并网暂态电压稳定性分析[D]. 兰州: 兰州理工大学, 2021.
Gao Jin. Transient voltage stability analysis of wind power grid connected based on dpeak equivalent modeling[D]. Lanzhou: Lanzhou University of Technology, 2021.
[13] Wang Guoteng, Xu Zheng, Zhang Zheren. Voltage stability analysis of power systems with a large number of non-synchronous machine sources connected [J]. International Journal of Electrical Power & Energy Systems, 2021, 131: 107087.
[14] Kawabe K, Tanaka K. Impact of dynamic behavior of photovoltaic power generation systems on short-term voltage stability[J]. IEEE Transactions on Power Systems, 2015, 30(6): 3416-3424.
[15] 程慧婕, 帅智康, 彭也伦, 等. 含异步机负荷的虚拟同步机并联系统暂态电压稳定性分析及其提升措施研究[J]. 中国电机工程学报, 2021, 41(14): 4787-4798.
Cheng Huijie, Shuai Zhikang, Peng Yelun, et al. Study on transient voltage stability and improvement measures of paralleled virtual synchronous generators system with induction motors[J]. Proceedings of the CSEE, 2021, 41(14): 4787-4798.
[16] Fang Jingyang, Si Wenjia, Xing Lantao, et al. Analysis and improvement of transient voltage stability for grid-forming converters[J]. IEEE Transactions on Industrial Electronics, 2024, 71(7): 7230-7240.
[17] 国家质量监督检验检疫总局, 中国国家标准化管理委员会. 风电场接入电力系统技术规定: GB/T 19963—2011[S]. 北京: 中国标准出版社, 2012.
[18] 刘昕宇, 史兴华, 辛焕海, 等. 故障恢复期间新能源多场站系统过电压快速评估方法[J]. 电力系统自动化, 2023, 47(13): 168-175.
Liu Xinyu, Shi Xinghua, Xin Huanhai, et al. Fast assessment method for overvoltage in multiple renewable energy station system during fault recovery process[J]. Automation of Electric Power Systems, 2023, 47(13): 168-175.
[19] 周双喜, 朱凌志, 郭锡玖, 等. 电力系统电压稳定性及其控制[M]. 北京: 中国电力出版社.
[20] Ma Shaokang, Geng Hua, Liu Lu, et al. Grid-synchronization stability improvement of large scale wind farm during severe grid fault[J]. IEEE Transactions on Power Systems, 2018, 33(1): 216-226.
[21] He Xiuqiang, Geng Hua, Xi Jiangbei, et al. Resynchronization analysis and improvement of grid-connected VSCs during grid faults[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(1): 438-450.
[22] Göksu Ö, Teodorescu R, Bak C L, et al. Instability of wind turbine converters during current injection to low voltage grid faults and PLL frequency based stability solution[J]. IEEE Transactions on Power Systems, 2014, 29(4): 1683-1691.
[23] Hu Pengfei, Chen Zheng, Yu Yanxue, et al. On transient instability mechanism of PLL-based VSC connected to a weak grid[J]. IEEE Transactions on Industrial Electronics, 2023, 70(4): 3836-3846.
[24] Li Yujun, Tang Yingyi, Lu Yiyuan, et al. Synchronization stability of grid-connected VSC with limits of PLL[J]. IEEE Transactions on Power Systems, 2023, 38(4): 3965-3976.
[25] 艾力西尔·亚尔买买提, 辛焕海, 黄林彬, 等. 变流器跟踪性能-抗扰性能-经济代价间的矛盾三角关系[J]. 中国电机工程学报, 2025, 45(增刊1): 58-70.
Yaermaimaiti Ailixier, Xin Huanhai, Huang Linbin, et al. Trade-off triangle of tracking performance, anti-interference performance, and economic cost of grid-connected converters[J]. Proceedings of the CSEE, 2025, 45(S1): 58-70.
Transient Voltage Stability Analysis of Voltage Source Converters Integrated System under DC Voltage Control
Abstract The transient voltage stability issues in traditional power systems mainly focus on the transient stability of induction motors in receiving-end power grids. However, with the large-scale integration of renewable energy sources (RES) into the sending-end grid, the system also faces serious transient voltage instability problems during fault recovery process. At present, the numerical simulation methods are mostly utilized to analyze the influence of RES on the voltage drop during fault, and the transient voltage stability is analyzed by numerically calculating the time-domain integration of the voltage lower than 0.8(pu), which is determined based on the engineering experience criteria. However, the voltage dynamics during fault recovery process is mainly determined by the voltage control mechanism of various equipments, the voltage stability of the system cannot be determined by the period of voltage recovery process. To avoid the misjudgment of the transient voltage stability of the RES integrated system, it is urgent to reveal the voltage instability mechanism considering the control strategies of RES. Therefore, based on the analogy of the transient instability process of synchronous generators, the transient voltage instability mechanism of RES under DC voltage control is revealed, the similarities and differences of transient voltage stability in RES integrated power systems and the traditional power system is sorted out. Afterwards, based on the quantitative analysis of boundaries for transient synchronous stability and transient voltage stability of RES integrated system, the transient stability dominance factor is proposed, and the rationality of the dominance of transient voltage stability in weak grids is demonstrated. Finally, the effectiveness of the proposed instability mechanism and analysis method is validated by electromagnetic transient simulations.
The following conclusions can be drawn from the simulation analysis: (1) With the DC voltage control, the RES integrated system crosses the unstable equilibrium point under the unbalanced active power during fault. Then, the positive-feedback voltage control mechanism of RES is caused, which results in the continuous increase of the active current and continuous decrease of AC voltage, and the transient voltage instability of RES integrated system happens. (2) When the grid is strong and reactive power gain of RES is large enough, the unbalanced active power during fault is relatively small, the increase of the active current is retarded, and the transient voltage stability of the system is improved. Moreover, increasing the proportional gain of DC voltage controller can enhance the system’s ability to respond the unbalanced power and provide additional braking effect. However, considering the lagging of integrator for DC voltage controller, increasing the integration gain will lead to the decrease of deceleration area of the system, and the transient voltage stability of the system is deteriorated. (3) The RES integrated system faces the transient synchronous instability and transient voltage instability risks simultaneously, and the transient voltage instability issue must be considered first when the grid is weak and the reactive power support of RES is insufficient. (4) The active power output by the RES during fault recovery process is increased with the decrease of PLL control bandwidths, and the transient voltage stability of the RES integrated system is improved after considering the PLL dynamics. Therefore, a conservative evaluation result is derived in this paper due to the neglect of PLL dynamics.
keywords:Renewable energy sources integrated power systems, transient voltage stability, DC voltage control, transient voltage stability boundary, transient stability dominance factor
中图分类号:TM712
DOI: 10.19595/j.cnki.1000-6753.tces.250731
智能电网重大专项(2030)(2024ZD0801000)和国网浙江省电力有限公司科技项目(B311DS25000A)资助。
收稿日期 2025-04-30
改稿日期 2025-07-23
刘昕宇 男,1998年生,博士,研究方向为新能源电力系统暂态电压稳定。
E-mail:liuxinyu_up@163.com(通信作者)
辛焕海 男,1981年生,教授,博士生导师,研究方向为交直流混联电力系统和高比例新能源电力系统稳定性分析和控制。
(编辑 赫 蕾)