图1 设备磁特性反演建模
Fig.1 Inverse modeling of magnetic characteristics of equipment
摘要 磁测传感器的定位精度直接影响电磁设备的磁特性反演精度。基于非线性最小二乘优化算法的磁传感器定位方法相对复杂、计算量大,并有可能获得局部优化解。而传统的解析式定位算法由于测试数据的不足,易受随机磁干扰的影响,实测定位精度较低。针对上述问题,该文提出基于磁信标的磁传感器空间位置新型解析式定位方法。首先,以五个永磁体组合作为待测设备,采用球谐函数法建立其等效模型,并通过该模型定量分析磁传感器的定位误差对其建模精度的影响。然后,为实现磁传感器的高精度定位,通过旋转测试法获得磁信标产生的磁场分布并计算相应的傅里叶系数;对傅里叶系数的表达式进行简化和计算,推导出磁传感器的空间坐标的显式表达式。最后,分别通过有限元法和实验测试验证了所提出的基于磁信标的磁传感器定位算法的准确性,从而支撑电磁设备磁特性反演精度的进一步提高。
关键词:磁特性反演 磁传感器定位 磁信标 零磁室
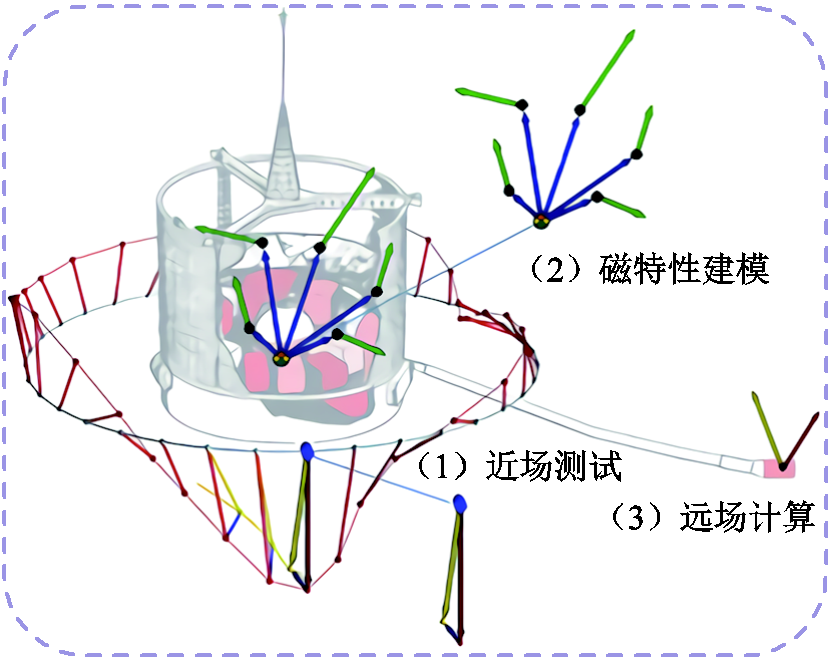
电磁设备的精确建模一直是国内外学者关注的一个主要研究方向,通过电磁设备的数学模型可以计算和评估设备内部或者周围的电磁场分布及其电磁性能,用以指导后续的优化设计及加工制造。常用的等效磁路法[1-2]、分层模型法[3-4]或子域模型法[5-6]属于数学模型正向推导过程[7-8](电磁场正问题),即通过已知的电磁设备几何、材料和电磁参数,根据麦克斯韦方程、安培环路定律和磁通连续定律等电磁理论,对其进行数学模型的推导。与此相对的电磁场逆问题是指通过电磁设备在周围产生的电磁场测量数据反向推算出其等效数学模型。国际上常用的电磁场逆问题等效模型有球谐函数法[9]与多磁偶极子法[10],其核心思想是通过电磁设备产生的电磁场测量数据,拟合与计算球谐模型或多磁偶极子模型中的参数(如球谐系数、磁偶极子位置和磁矩大小等),从而反演设备在任意位置处的电磁场分布,如图1所示。
图1 设备磁特性反演建模
Fig.1 Inverse modeling of magnetic characteristics of equipment
深空磁探测领域中磁传感器通常安装在航天器上。由于航天器本身由复杂的机、电、电子学等部件组成,将对磁探测数据产生干扰。因此,为保障磁探测精度和数据可靠性,需要在航天器研制阶段对其部件和整星进行磁测与反演建模,从而限制航天器自身磁场[11-12]。在地理勘探和地球物理探测领域中,可以通过电磁场反演用于地下岩石、冰块和金属等物质的成像与探测[13]。在这些领域中,建模对象相当于一个“黑匣子”,需要通过周围探测数据对“黑匣子”进行参数识别。因此,作为电磁学领域的研究热点,电磁场逆问题具有重要的科学研究和工程应用价值。
由电磁场逆问题的原理可知,对“黑匣子”的参数识别的精度在很大程度上取决于测量数据的数量及其准确性。为准确反演待测设备的磁特性,理想情况是得到设备周围的全部磁场数据,可以假想为一个包围设备的球面中的无限多的测试点[14]。然而,考虑到可行性,实际磁测点布置只能设置有限多的测试点。国内外研究中通常将若干个传感器布置在待测设备周围,然后通过无磁转台将待测设备旋转360°,从而得到尽量多的测试点数据。然而,较多数量的磁传感器会引入更多的定位误差,从而影响电磁设备磁特性的建模精度,因此需要对磁传感器的空间位置进行准确定位。根据物理方式的不同,磁传感器的定位方法可以分为两种,一种是将AruCo等图像标记贴在传感器上,基于图像处理法完成对传感器位置、方位误差的标定[15]。基于图像处理法只能得到传感器物理外壳位置而不是实际的内部磁测量点,存在一定误差。另一种方法是基于磁信标的定位方法,磁信标可选择已知磁特性的线圈或者永磁体。与永磁体相比,由于电磁线圈可以更灵活地控制磁场,多数研究人员利用多轴电磁线圈作为磁信标。希腊雅典国立技术大学N. C. Kapsalis教授团队提出了一种基于通电线圈的磁传感器空间位置最小二乘标定方法[16]。然而,基于最小二乘法的非线性优化方法有其局限性[17-20]。首先,多数非线性优化算法需要进行初始值估计,以开始寻找最优解。如果初始值存在较大偏差,则算法可能无法给出全局解;其次,优化计算过程时间长;第三,计算复杂度高。为解决上述问题,国内外学者也提出了基于解析式的磁传感器定位方法,即传感器的空间位置可以通过显式公式计算,具有方法简单、计算速度快的优点。然而,传统解析定位方法存在需要数量较多的磁信标,从而导致引入较多不确定度、增加测试复杂程度[21]或是由于测试数据的不足定位精度较低[22-23]等问题,需要进一步研究和解决。
针对国内外现状存在的问题,本文提出一种基于磁信标的磁传感器新型解析式定位算法。首先,以若干个永磁体组合作为等效电磁设备,建立了其球谐函数模型。其次,通过该模型定量分析了磁传感器的定位误差对电磁设备反演精度的影响。然后,利用磁信标结合转台测试法获取磁测数据后计算了相应的傅里叶系数,并通过推导获得了基于磁信标的磁传感器解析式空间坐标计算方法。最后,通过有限元仿真计算和实验测试对该定位方法进行了验证,为电磁设备磁特性反演建模领域的进一步发展奠定了基础。
在本节中简要介绍了磁特性反演建模方法,并通过有限元法对其进行验证。然后,通过该模型分析了磁传感器的定位误差对反演精度的影响。
理论上,任意空间磁场分布均可以用具有足够阶数的球谐函数表示。因此,本文将待测设备产生的空间磁场分布在球坐标系下的三个分量Br、Bθ和Bφ分别表示为
 (1)
(1)
 (2)
(2)
 (3)
(3)
式中,μ0为空气磁导率;j和m分别为球谐函数的阶数与次数;ajm和bjm为球谐系数(或称高斯系数);r、θ和φ为磁传感器在球坐标下的三个空间坐标;Pjm为施密特准归一化的缔合勒让德函数。
电磁设备的磁测及建模方法如下:将待测设备放在无磁转台上,并控制该转台每隔一定角度(如10°)以z轴顺时针旋转360°,并通过布置在设备周围的若干个磁传感器实时记录该设备产生的磁场分布,如图2所示。坐标系原点设置为待测设备的中心点,在磁测布置中设置的共q个磁传感器均处于xOz平面中。通过上述方式可以得到在特定位置处的待测设备产生的磁场分布。根据上述磁测数据就可以求解式(1)~式(3)中的各阶球谐系数,从而完成待测设备的反演建模,具体算法可以参考课题组先前的研究工作[24],在这里不再赘述。
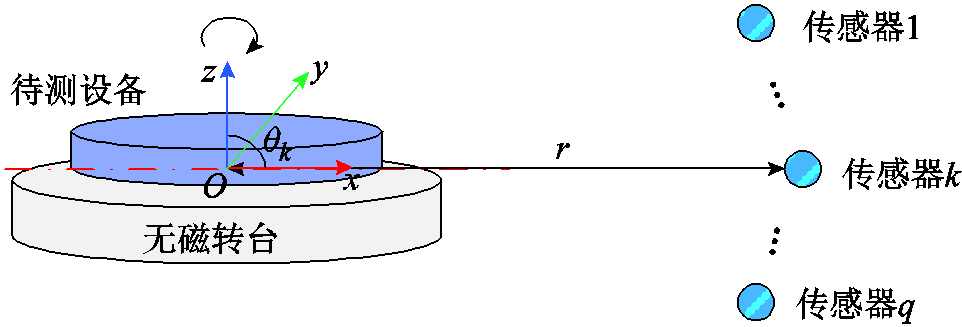
图2 磁测布置
Fig.2 Test set up
在下面采用5个边长为10 mm的立方体永磁体组合构成等效待测设备,通过有限元法计算的磁测数据作为输入,计算了表征该电磁设备的球谐系数。待测设备及传感器布置如图3所示。图3中标注了坐标系、各个永磁体的空间位置、充磁方向、磁传感器的数量及其布置。其中,坐标系原点与零磁室底面相距400 mm,磁传感器与坐标系原点之间的水平距离s为500 mm,传感器之间的竖直距离d为250 mm。
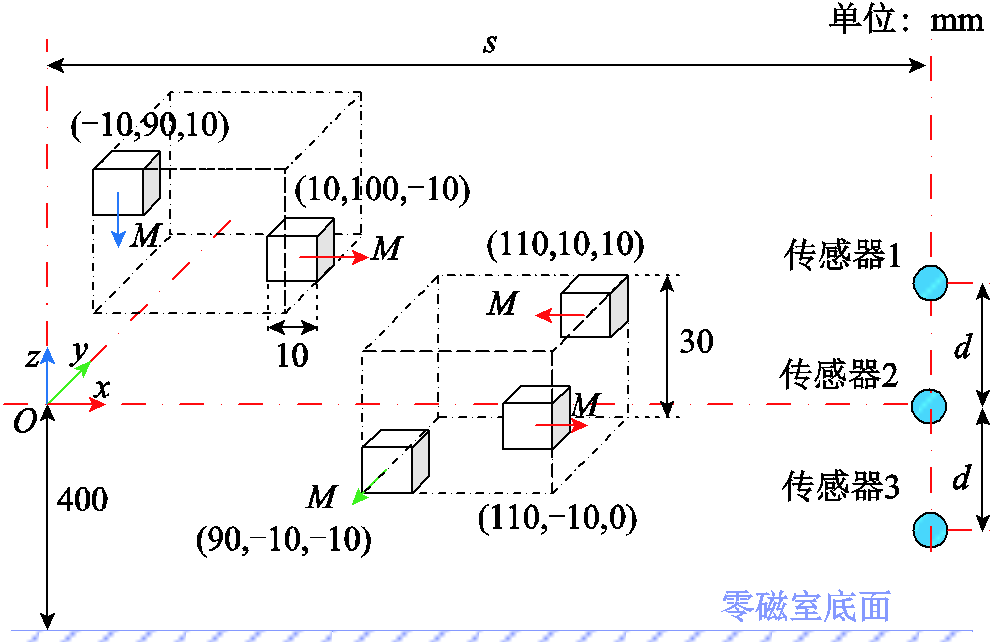
图3 待测设备及传感器布置
Fig.3 Equipment under test and sensor layout
零磁室(多层被动磁屏蔽室)通常由多层嵌套的坡莫合金层和铝层构成[25-26],分别通过磁路并联和感应涡流几乎消除了环境磁干扰,具有超洁净和高稳定的零磁环境,给电磁设备的高精度磁测与反演建模提供了理想的平台,其仿真模型和哈工大建设的大型零磁装置分别如图4和图5所示。相比于零磁室尺寸,由于待测设备尺寸较小,建立了3层球形结构的剖分细化区域。然后,通过有限元法计算了当待测目标旋转360°时,3个磁传感器所在位置处的磁场变化趋势,如图6所示。
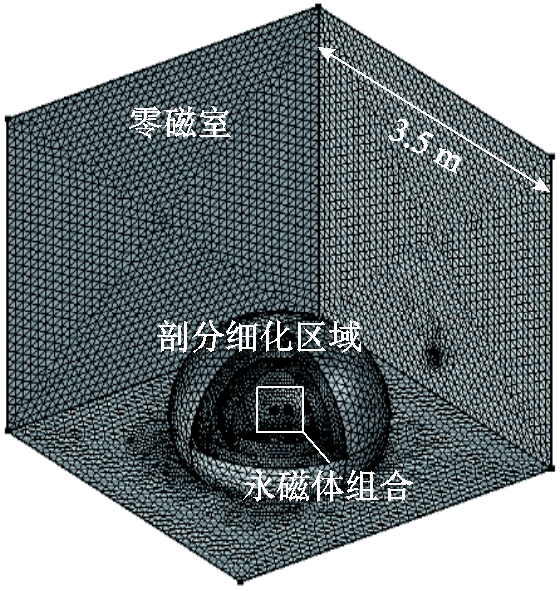
图4 有限元模型
Fig.4 Finite element model

图5 哈工大零磁室
Fig.5 Magnetic shielding room built by HIT
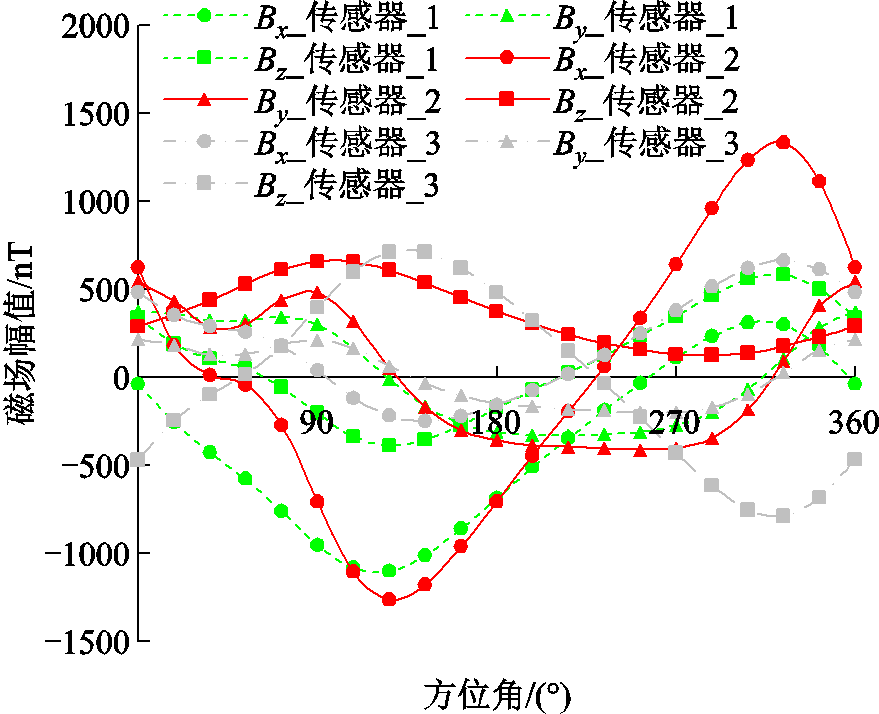
图6 3个磁传感器处的磁场分布
Fig.6 Magnetic field distribution at the location of three magnetic sensors
以图6中的测试数据作为输入,计算了表征待测设备的各阶球谐系数,见表1。在表1中,球谐系数的阶数计算至j=6。将表1中的球谐系数代入式(1)~式(3),就可以计算图3中的5个永磁体在空间任意位置处的磁场分布。为验证已建立的球谐模型,分别通过球谐模型和有限元法计算了在径向距离为848.5 mm、俯仰角为45°,方位角从0变化到360°时的磁场变化趋势,如图7所示。可以看到,分别通过球谐模型和有限元法计算出的磁场分布基本一致,可以验证球谐模型的准确性和有效性。
表1 球谐系数
Tab.1 Spherical harmonic coefficient
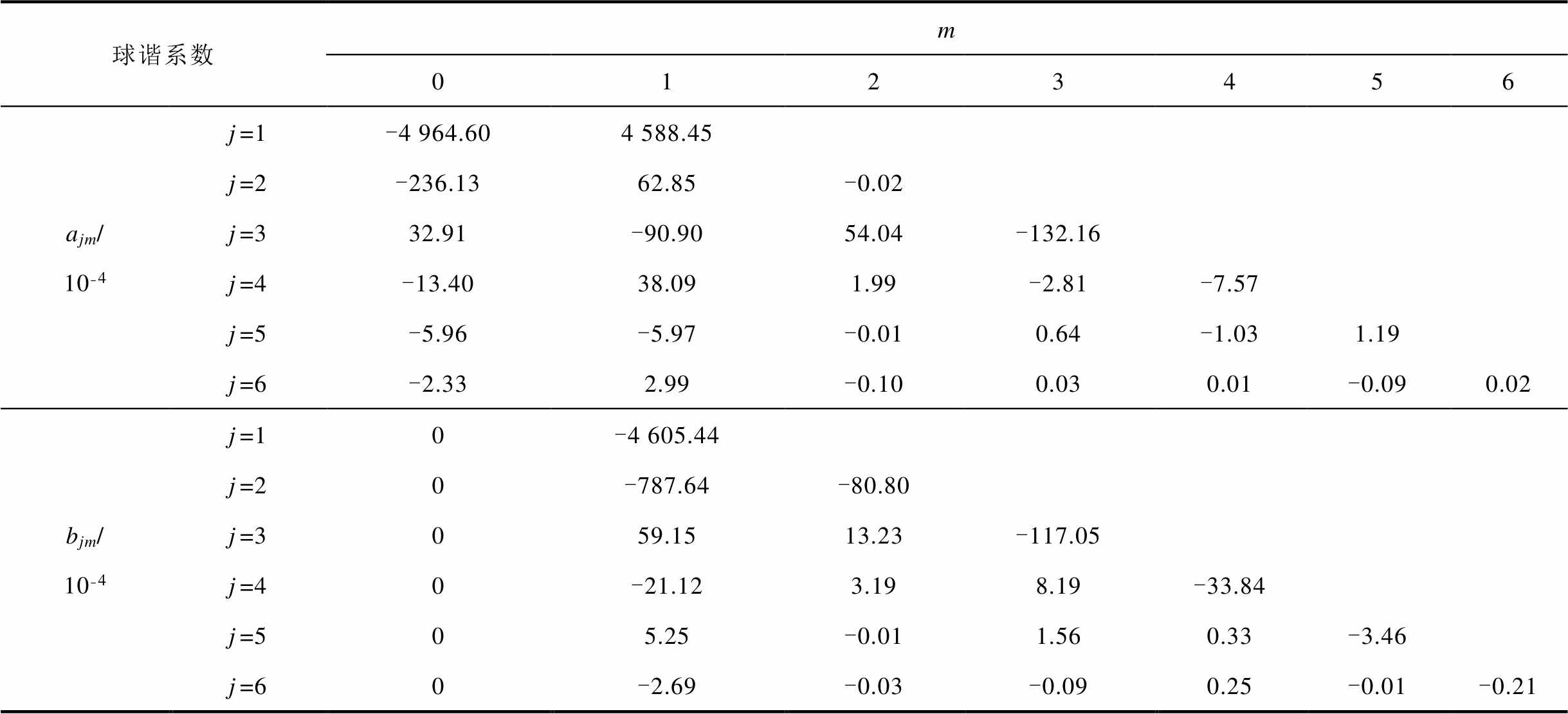
球谐系数m 0123456 ajm/10-4j=1-4 964.60 4 588.45 j=2-236.13 62.85 -0.02 j=332.91 -90.90 54.04 -132.16 j=4-13.40 38.09 1.99 -2.81 -7.57 j=5-5.96 -5.97 -0.01 0.64 -1.03 1.19 j=6-2.33 2.99 -0.10 0.03 0.01 -0.09 0.02 bjm/10-4j=10 -4 605.44 j=20 -787.64 -80.80 j=30 59.15 13.23 -117.05 j=40 -21.12 3.19 8.19 -33.84 j=50 5.25 -0.01 1.56 0.33 -3.46 j=60 -2.69 -0.03 -0.09 0.25 -0.01 -0.21
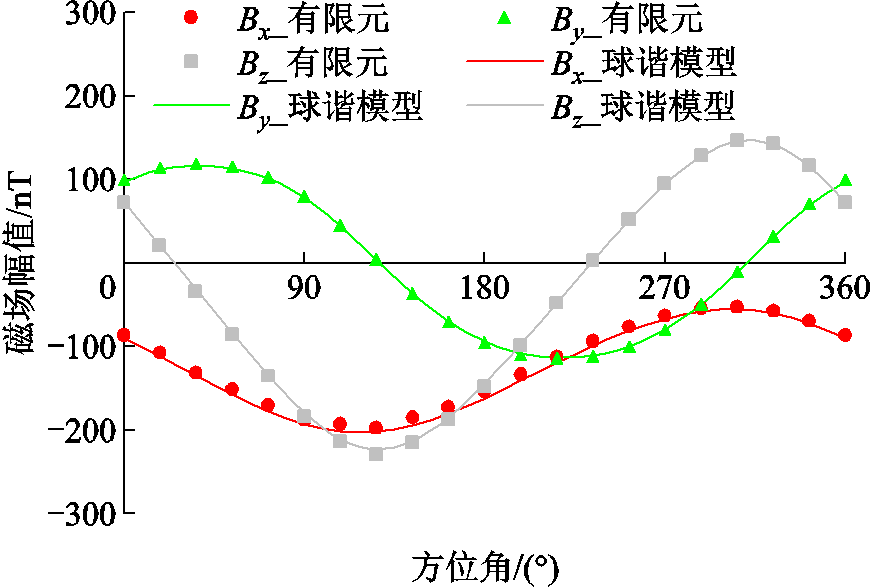
图7 永磁体组合在空间中产生的磁场分布
Fig.7 Magnetic field distribution generated by the PMs
根据前面推导出的球谐模型,分析了传感器位置误差对模型反演计算精度的影响,3个传感器在笛卡尔坐标系下的3个坐标乘以一个定位偏差系数,并计算在径向距离为848.5 mm、俯仰角为45°时的三轴磁场计算结果,如图8a~图8c所示。可以看到,传感器位置误差对模型反演精度的影响近似呈现为缩放误差的形式。
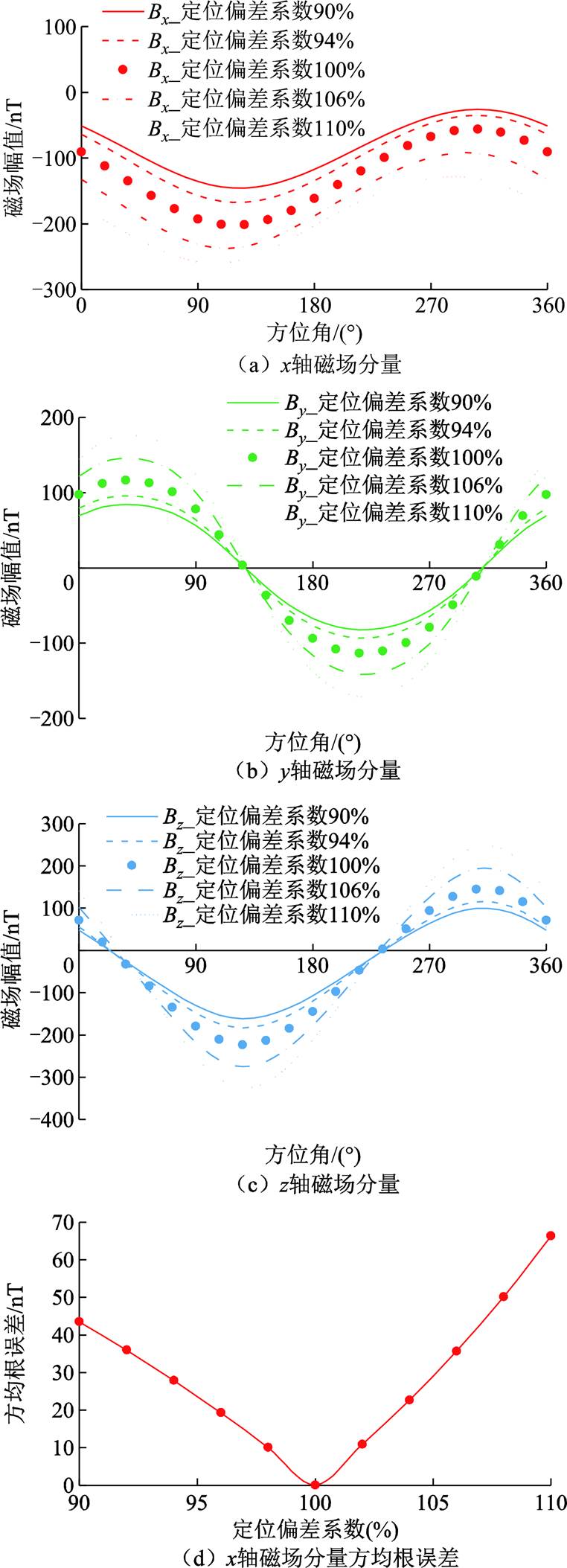
图8 传感器位置误差对建模精度的影响
Fig.8 Influence of sensor position error on modeling accuracy
为了定量分析,计算了随着定位偏差系数的增大,球谐模型反演结果的方均根误差变化曲线,如图8d所示。其中,x轴磁场分量的方均根误差的计算公式为
 (4)
(4)
式中, 、
、 分别为有、无定位误差时的磁场幅值x轴分量;N1为离散点数,在权衡拟合磁场曲线的准确度和计算成本后,在这里取21。y轴和z轴磁场分量方均根误差的计算方法与式(4)相同。可以看到,传感器的位置偏差与其导致的模型反演方均根误差之间近似呈现线性关系。并且,对传感器坐标预测偏大时,对反演建模的影响大于对传感器坐标预测偏小时的情况,在定位偏差系数达到110%时,反演方均根误差超过66 nT。y轴和z轴分量的方均根误差趋势与x轴分量类似,不再赘述。从分析结果可知,磁传感器的定位误差直接影响了电磁设备建模的精度,因此需要对其空间位置进行精确定位。
分别为有、无定位误差时的磁场幅值x轴分量;N1为离散点数,在权衡拟合磁场曲线的准确度和计算成本后,在这里取21。y轴和z轴磁场分量方均根误差的计算方法与式(4)相同。可以看到,传感器的位置偏差与其导致的模型反演方均根误差之间近似呈现线性关系。并且,对传感器坐标预测偏大时,对反演建模的影响大于对传感器坐标预测偏小时的情况,在定位偏差系数达到110%时,反演方均根误差超过66 nT。y轴和z轴分量的方均根误差趋势与x轴分量类似,不再赘述。从分析结果可知,磁传感器的定位误差直接影响了电磁设备建模的精度,因此需要对其空间位置进行精确定位。
传统的磁通门或者是原子磁力仪的外封装位置与内部测量点之间没有固定联系,并且存在个体差异性。通过光学或者传统的机械定位方法只能获得其外封装位置,而不能对其实际的内部测量点进行准确定位,从而导致定位误差。因此,本文提出一种基于磁信标的磁传感器定位方法。
磁信标采用三轴正交线圈,由磁偶极子的原理可知,当磁传感器的与磁信标的距离大于磁信标尺寸的3倍以上时,可以将磁信标作为磁偶极子。因此,3个正交线圈正好对应三轴正交磁矩矢量Mx、My和Mz。
在式(1)~式(3)中,球谐阶数设为1,则可以得到磁偶极子在空间产生的磁场表达式为
 (5)
(5)
 (6)
(6)
 (7)
(7)
由球谐函数的多级展开项可知,一阶球谐系数与磁信标三轴磁矩之间的关系为
 (8)
(8)
式中,Ix、Iy和Iz为三轴线圈电流;Sx、Sy和Sz为三轴线圈的截面积;Nx、Ny和Nz为三轴线圈的匝数。
因此,只要磁信标的电磁参数与通电电流已知,相应的球谐系数a10、a11和b11通过式(8)可以计算得到。然后,只要获得磁传感器测量数据,式(5)~式(7)中的未知数只有传感器的位置。然而,该方程组求解较为复杂,国内外学者通常采用基于最小二乘法的优化算法计算,该方法无法给出各个坐标的解析表达式。优化算法会增加求解的复杂性,并且其结果可能随着初始值的不同而不同,还易陷入局部优化解当中。因此,本文引入一个中间量——傅里叶系数。测试布置与图2类似,只是将待测设备换成已知磁矩的磁信标。旋转磁信标360°,并通过磁传感器进行测量,此时,磁信标在待测磁传感器处产生的磁感应强度为
 (9)
(9)
 (10)
(10)
 (11)
(11)
式中, 为磁信标的旋转角度,由0°逐渐增大至360°。将磁传感器在笛卡尔坐标系下的三分量通过球坐标系下的三分量表达为
为磁信标的旋转角度,由0°逐渐增大至360°。将磁传感器在笛卡尔坐标系下的三分量通过球坐标系下的三分量表达为
 (12)
(12)
然后,计算磁传感器三轴读数的零阶傅里叶系数,即将式(12)代入式(13)。
 (13)
(13)
经整理得到
 (14)
(14)
根据式(14),可以求出磁传感器的方位角为
 (15)
(15)
然后,可以计算磁传感器一阶傅里叶系数为
 (16)
(16)
对其中Ay_sin(1)的表达式进行展开,有
将式(17)除以Az_dc,可以得到
 (18)
(18)
其中
 (19)
(19)
从式(18)可以看到,只有磁传感器的俯仰角 是未知的,其他变量都是已知量。对式(18)进行化简,得到俯仰角的计算表达式为
是未知的,其他变量都是已知量。对式(18)进行化简,得到俯仰角的计算表达式为
 (20)
(20)
其中
 (21)
(21)
 (22)
(22)
 (23)
(23)
 (24)
(24)
同理,对式(16)中的Ax_sin(1)、Ax_cos(1)和Ay_cos(1)进行展开整理之后,也可以求出俯仰角的计算公式。对上述结果进行平均,从而获得最终俯仰角。
对式(16)中的Az_cos(1)的表达式进行展开和简化,得
 (25)
(25)
将计算出的俯仰角代入式(25)中,可以计算磁传感器的径向距离为
 (26)
(26)
同理,对Az_sin(1)进行展开和简化也可得到径向距离的计算公式,对其进行平均得到最终径向距离。
将磁传感器的球坐标转换为笛卡尔坐标,即
 (27)
(27)
至此,即完成了磁传感器的定位。需要补充的是,式(15)和式(20)中分别采用了反正切函数与反正弦函数。因此,存在歧义性问题。所以,需进行如下改进:
 (28)
(28)
 (29)
(29)
为验证前面提出的基于磁信标的解析式定位算法,通过有限元法进行了验证。有限元模型如图9所示。最外围两个球体之间的空间构成无限远域,并且围绕磁信标和目标点建立了一个剖分细化域的球体,进行局部加密剖分,保证有限元计算结果的准确性。首先,给定一组3个磁矩分量(磁信标),分别为Mx= 0.646 A∙m2,My=0.3 A∙m2和Mz= 0.5 A∙m2;然后,任意选定一个目标点作为磁传感器布置点,计算在磁信标随着方位角旋转360°时,磁传感器的三分量的变化曲线;最后,磁场数据代入前面推导出的计算公式中,得到了该目标点处的定位计算结果。
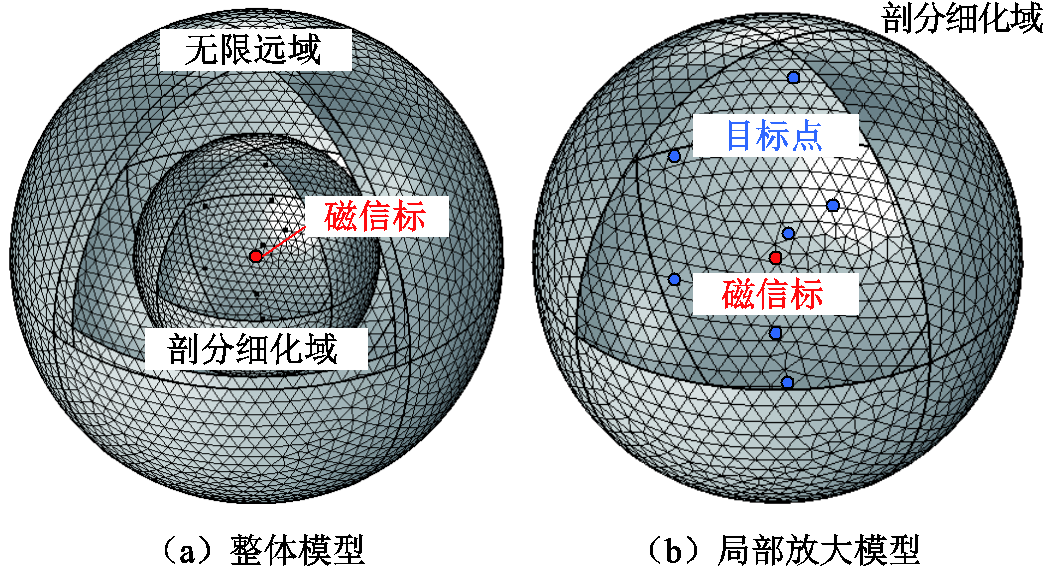
图9 有限元模型
Fig.9 Finite element model
按照同样的方法,也对其他7个目标点坐标进行了计算,并将理想值与计算值进行了对比,结果见表2。可以看到,目标空间坐标的理想值与计算值基本一致。
表2 不同目标点的仿真定位结果
Tab.2 Simulation localization results for different target points
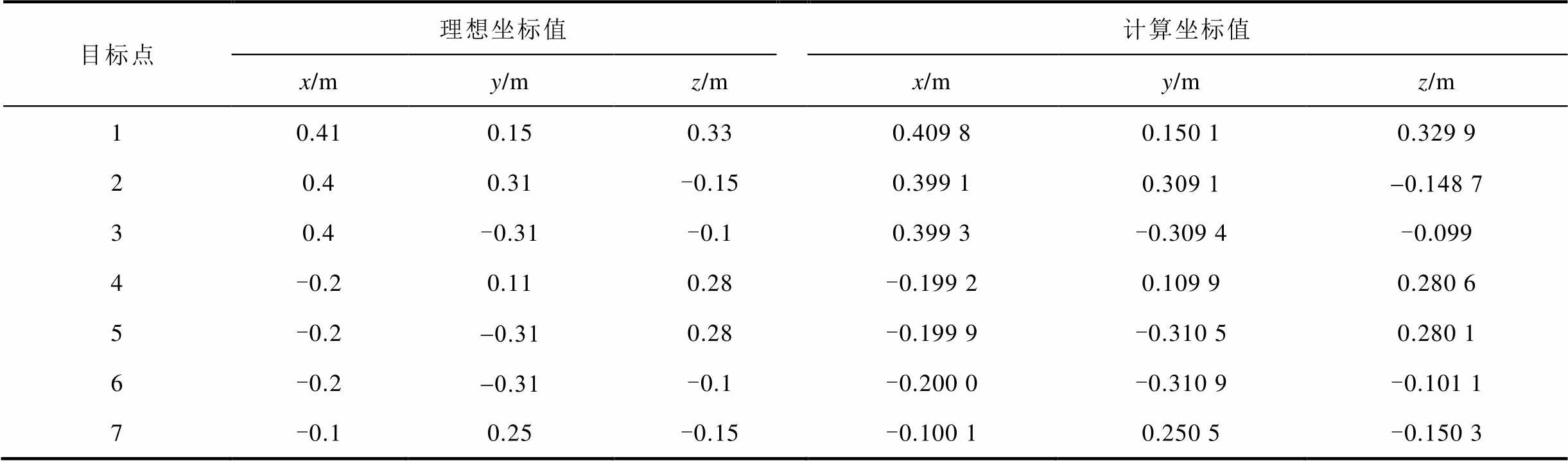
目标点理想坐标值计算坐标值 x/my/mz/mx/my/mz/m 10.410.150.330.409 80.150 10.329 9 20.40.31-0.150.399 10.309 1-0.148 7 30.4-0.31-0.10.399 3-0.309 4-0.099 4-0.20.110.28-0.199 20.109 90.280 6 5-0.2-0.310.28-0.199 9-0.310 50.280 1 6-0.2-0.31-0.1-0.200 0-0.310 9-0.101 1 7-0.10.25-0.15-0.100 10.250 5-0.150 3
为分析本文提出磁传感器定位算法的抗随机干扰能力,针对表2中的目标点1的磁场数据添加了一个平均值为零,方差为10 nT的高斯噪声,并进行了1 000次的重复计算,并与Hu Chao等[22]和Dai Houde等[23]提出的解析式定位算法进行了对比,如图10所示。
可以看到,1 000次重复计算的平均值逼近理论值。此外,在相同随机干扰条件下,本文提出的算法重复计算数据的标准差最小为1.058 mm,体现了本文提出算法的抗干扰能力,因此,可保证在实际应用中的定位精度。
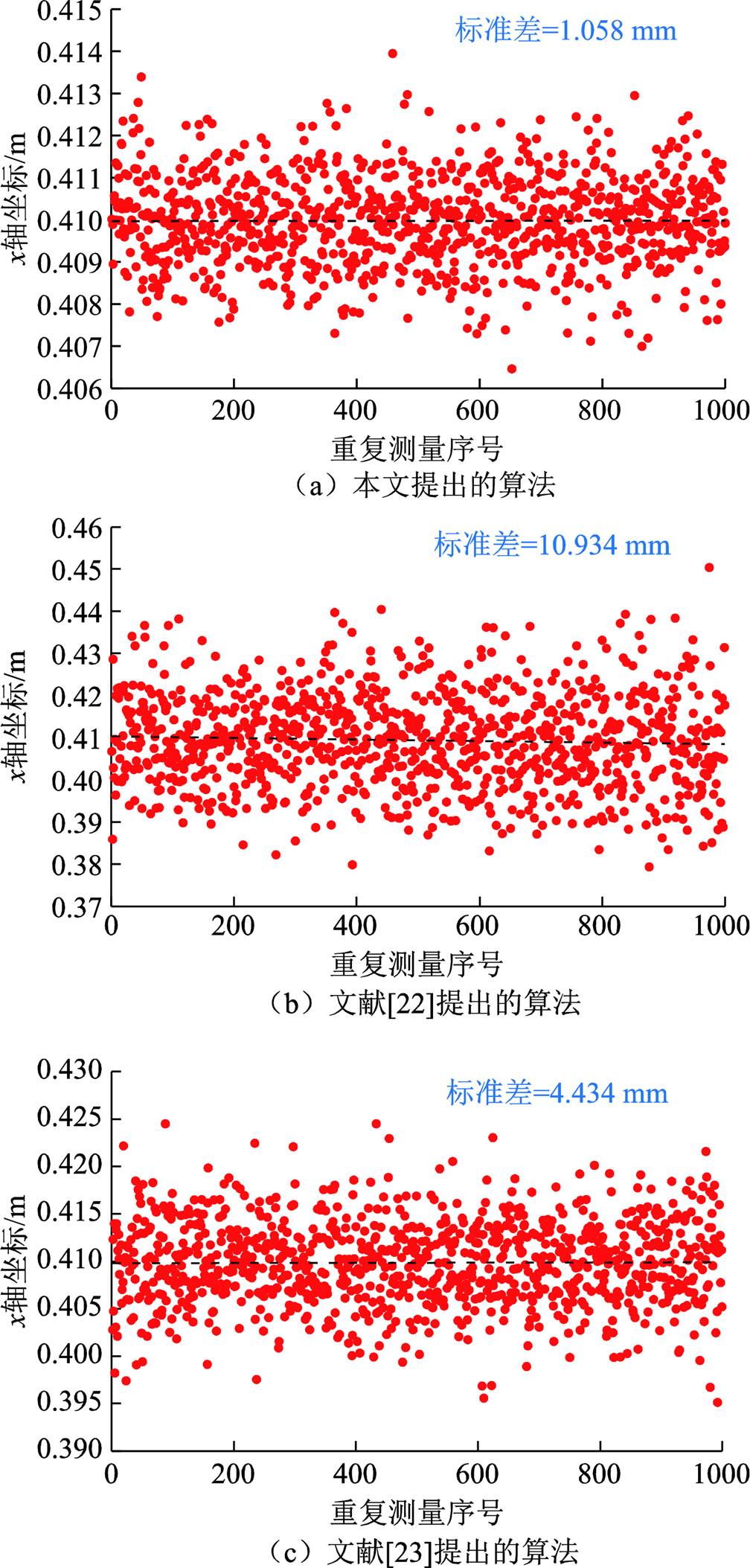
图10 定位算法抗随机干扰能力对比
Fig.10 Comparison of positioning algorithm’s anti-random noise performance
本节对基于磁信标的磁传感器定位方法进行了实验验证。通过三轴正交线圈产生3个磁矩分量(Mx= 0.172 3 A∙m2,My=0.266 6 A∙m2,Mz=0.364 5 A∙ m2)构成磁信标,其骨架外部边长为50 mm。线圈骨架和三轴磁信标如图11a和图11b所示。图11c中给出了测试台三维模型以及各个设备之间的连接示意图。
将磁信标放到无磁转台的转盘中心,而传感器安装在由亚克力板制作的安装面。该安装面上均布若干安装孔,传感器可在xOz平面上移动,相应的实测布置如12a所示。通过日本菊水的PBZ系列电源对磁信标提供频率为7 Hz的正弦电流,并通过泰克示波器和电流钳进行电流监测,如图12b所示。磁传感器采用Bartington-mag13,并通过Bartington-PSU1给磁传感器供电。然后,PUS1的x、y和z轴分量输出分别接到3台苏黎世仪器的MFLI锁相放大器,从而解调出与供电频率相对应的磁场信号,如图12c所示。
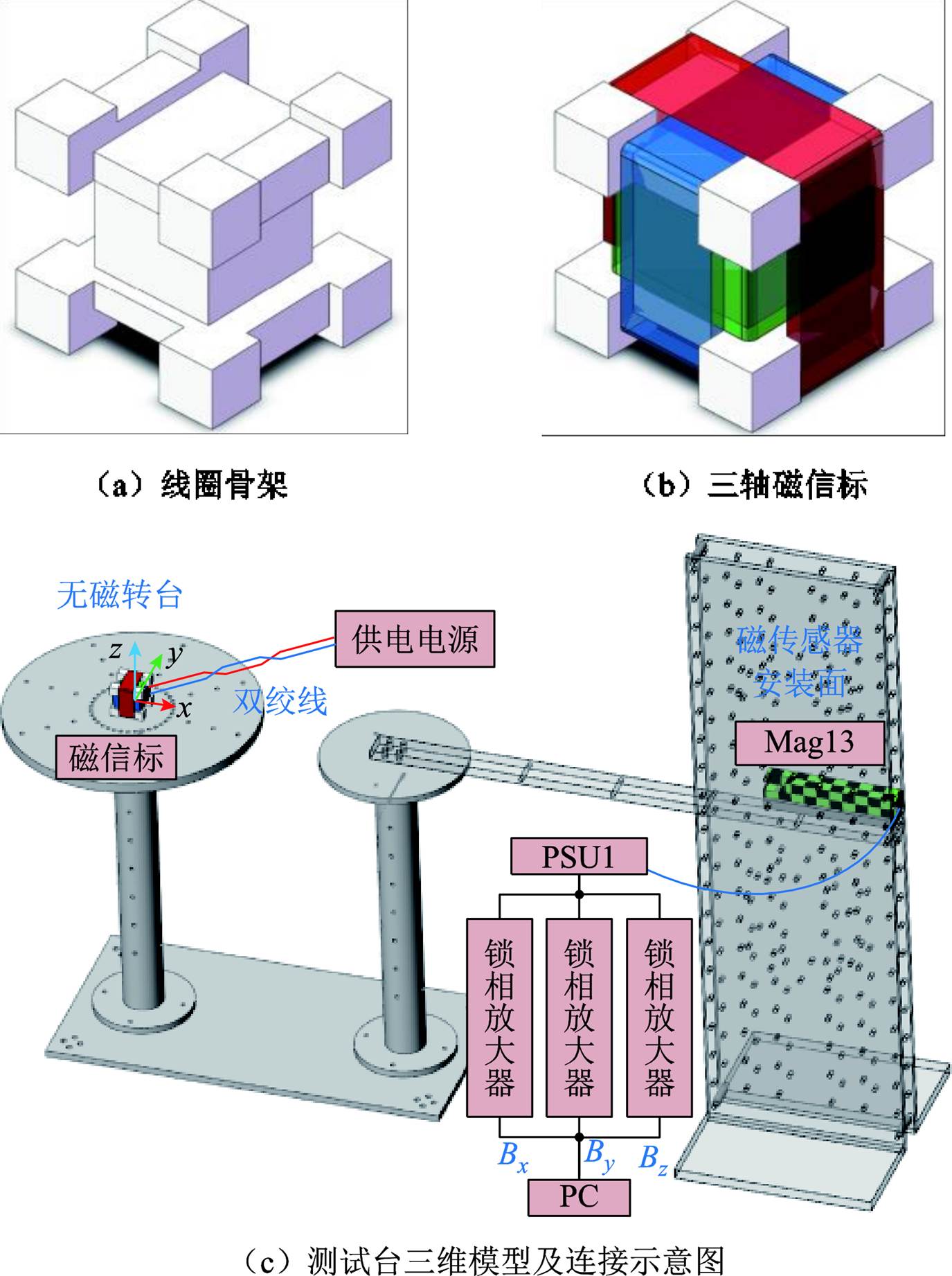
图11 磁信标及测试台三维模型
Fig.11 3D model of magnetic beacon and test bench
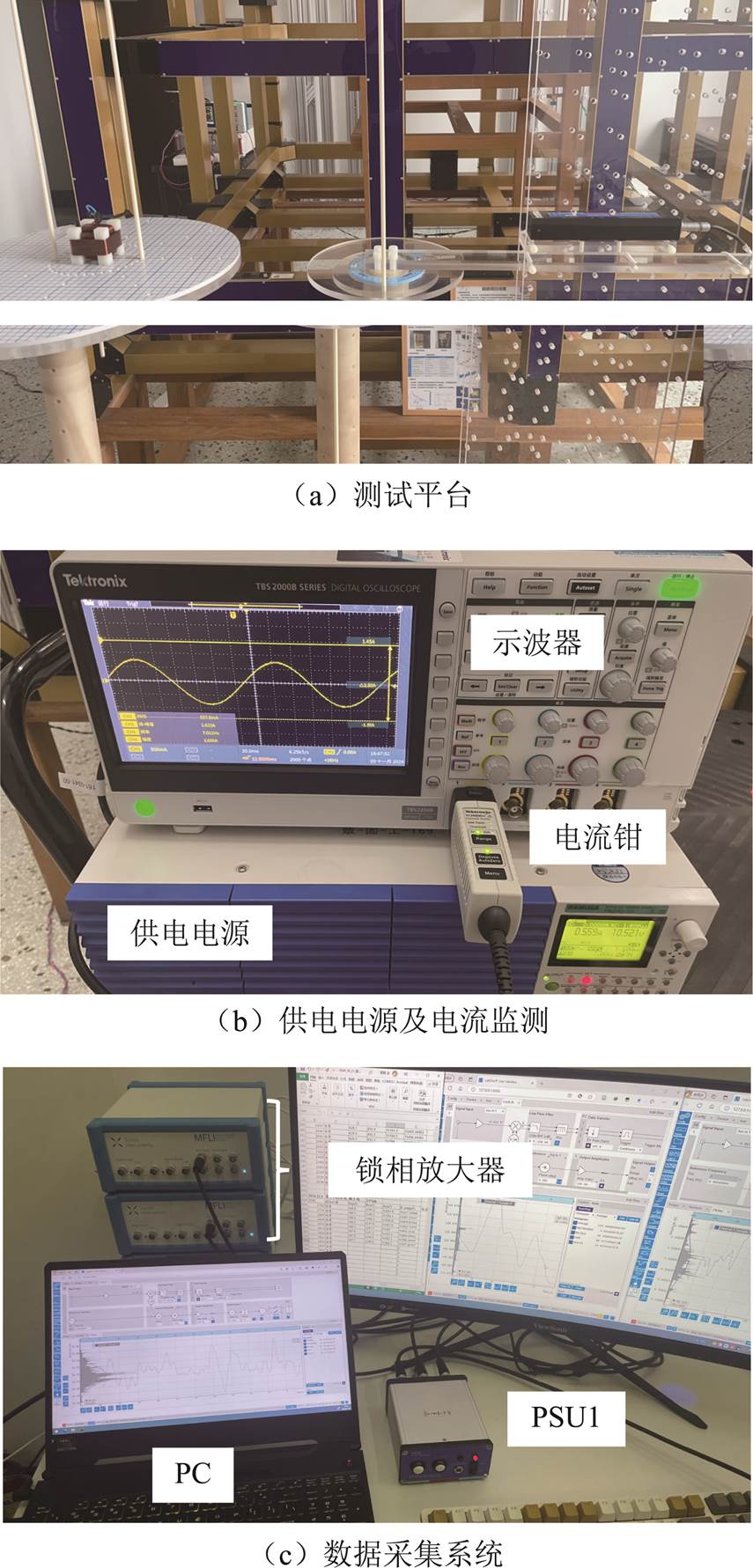
图12 实验测试
Fig.12 Experimental measurement
通过实测数据,对xOz平面上的5个不同位置进行了空间定位,不同目标点的实测定位结果见表3。由于实验平台的限制,传感器始终处于xOz平面上,因此只计算了传感器的x坐标和z坐标。可以看到,预设坐标值和计算坐标值大致相同。其中,预设坐标值是指通过测试平台的三维模型获得的磁传感器空间坐标值。值得注意的是,与仿真计算时的情况不同,考虑到实际测试平台的加工公差和装配误差,不能将它认定为理想值。然而,国内外研究学者通常将采用机械定位(借助预打孔工装或者网格纸等)获得的传感器坐标值作为理想值计算传感器定位算法的精度,忽略了加工和装配误差[22-23]。实际上,即使通过激光跟踪仪等超高精度的机械定位方法得到的传感器的坐标值也不能认为是理想值,因为机械定位方法只能确定传感器外壳的位置而不是其内部磁场测量点的位置。
表3 不同目标点的实测定位结果
Tab.3 Test localization results for different target points
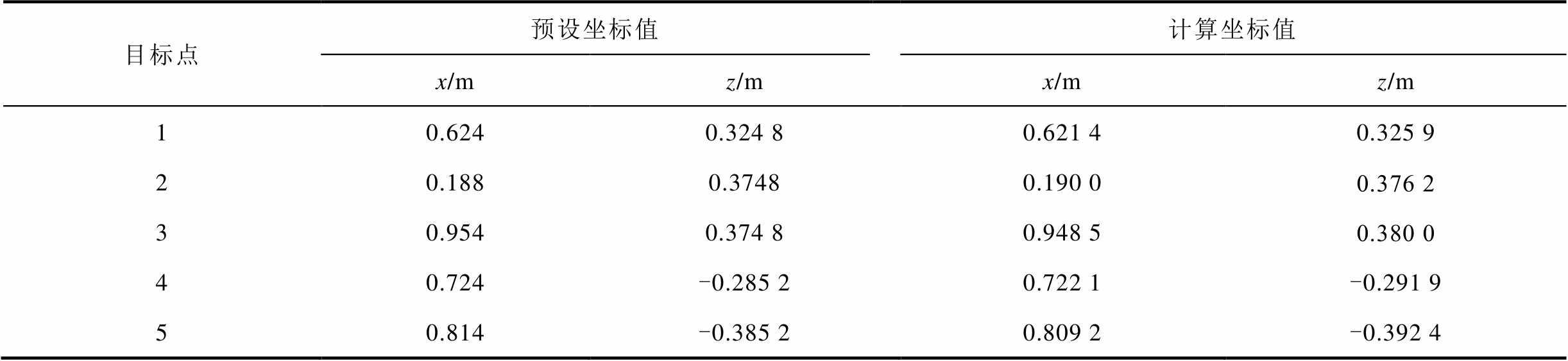
目标点预设坐标值计算坐标值 x/mz/mx/mz/m 10.6240.324 80.621 40.325 9 20.1880.37480.190 00.376 2 30.9540.374 80.948 50.380 0 40.724-0.285 20.722 1-0.291 9 50.814-0.385 20.809 2-0.392 4
因此,本文采取对比磁场分布的方式验证计算坐标值的准确性。由于磁信标的电磁参数已知,采用有限元法分别计算了磁信标在预设坐标值(0.188 0 m, 0, 0.374 8 m)和计算坐标值上(0.190 0 m, 0, 0.376 2 m)的磁场分布,并与相应的实验测试数据进行了比较,传感器定位算法实验验证如图13所示。经过对比发现,通过有限元法计算的磁信标在计算坐标值上(0.190 0 m, 0, 0.376 2 m)的磁场分布更接近实际的测试数据,从而验证了定位算法的准确性。
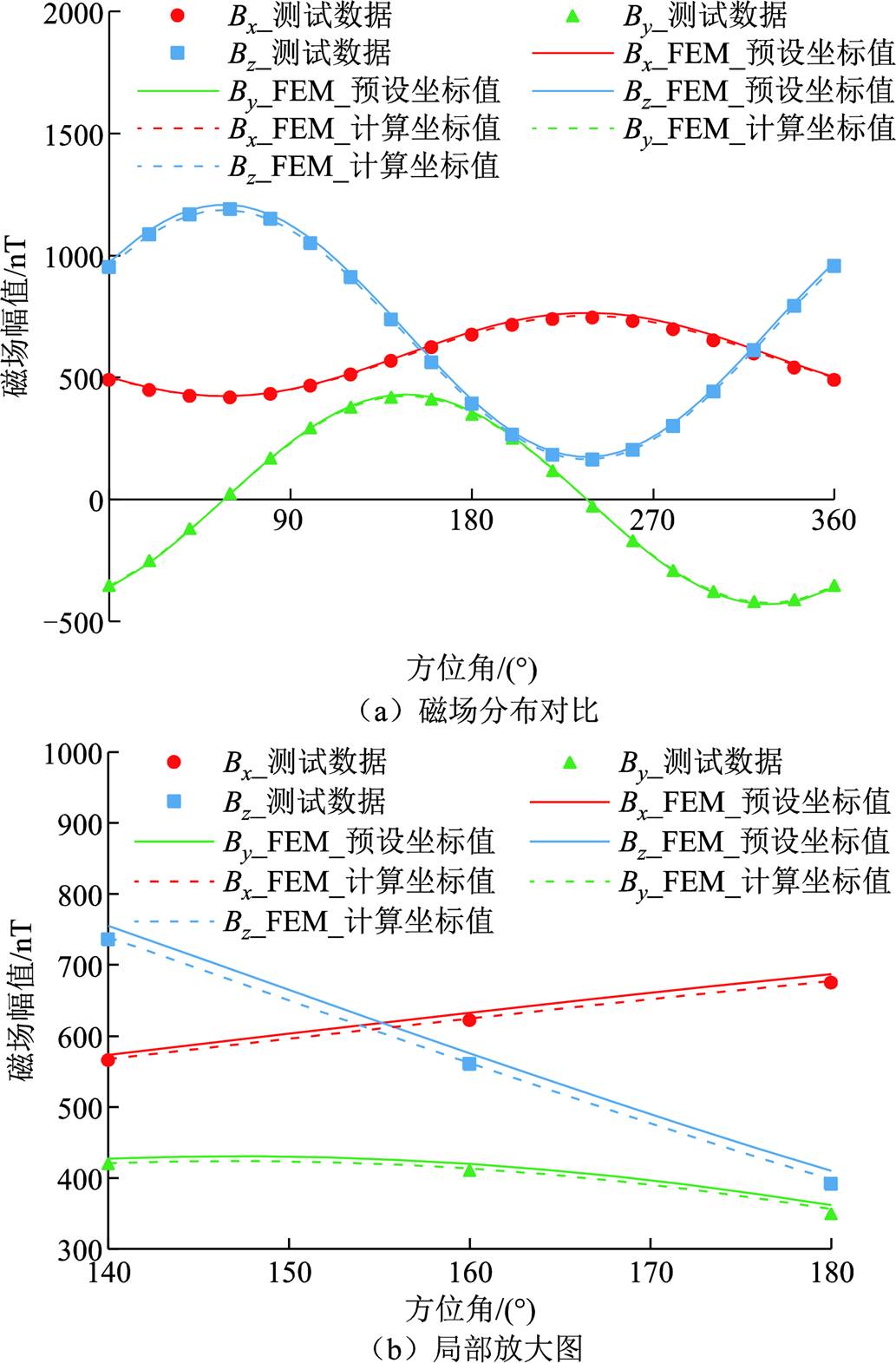
图13 传感器定位算法实验验证
Fig.13 Experimental verification of sensor positioning algorithm
通过使磁传感器空间定位更精确,可以获得更优的电磁设备反演精度。为了给出定量的提升效果,分别通过表3中的预设坐标值和计算坐标值对磁信标的磁矩进行了反演计算,并与通过式(8)计算的磁矩进行了对比,结果见表4。
表4 磁信标磁矩的反演计算结果
Tab.4 Inversion results of moment of magnetic beacon
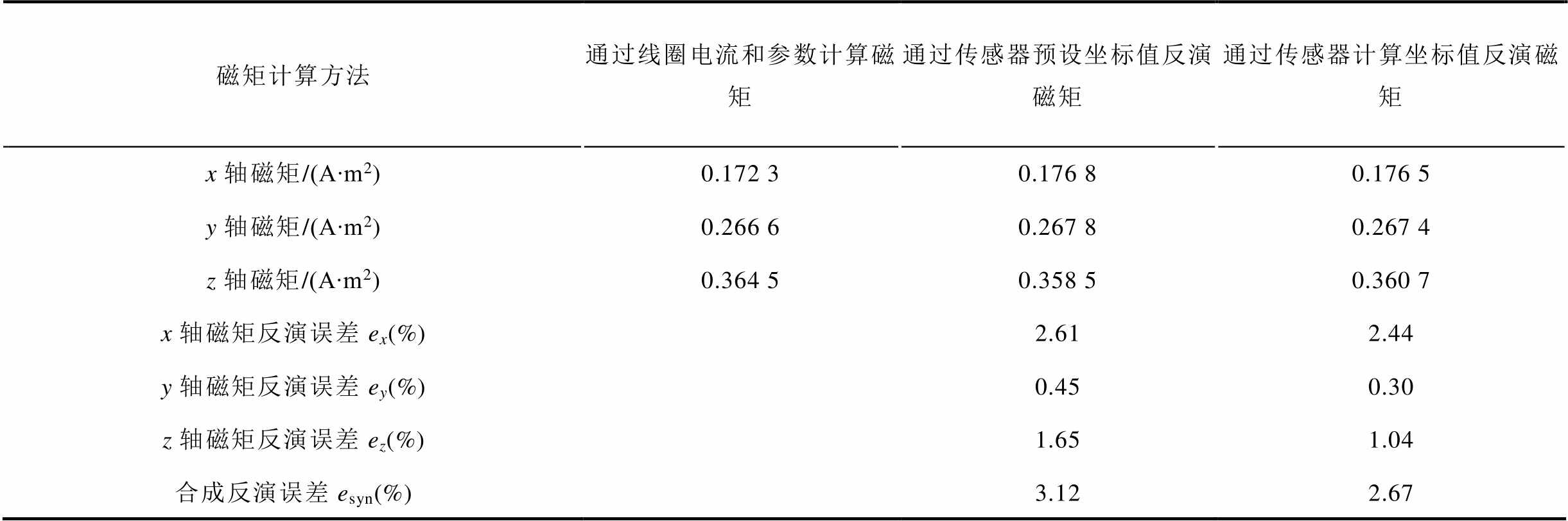
磁矩计算方法通过线圈电流和参数计算磁矩通过传感器预设坐标值反演磁矩通过传感器计算坐标值反演磁矩 x轴磁矩/(A∙m2)0.172 30.176 80.176 5 y轴磁矩/(A∙m2)0.266 60.267 80.267 4 z轴磁矩/(A∙m2)0.364 50.358 50.360 7 x轴磁矩反演误差ex(%)2.612.44 y轴磁矩反演误差ey(%)0.450.30 z轴磁矩反演误差ez(%)1.651.04 合成反演误差esyn(%)3.122.67
表4中的三个分量以及合成反演误差计算式为
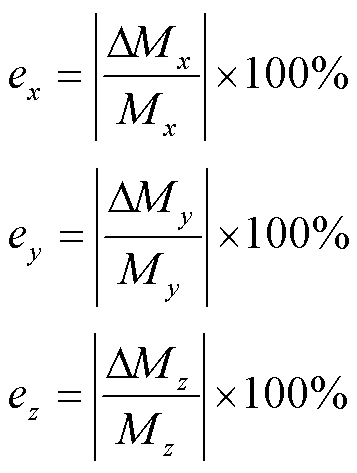 (30)
(30)
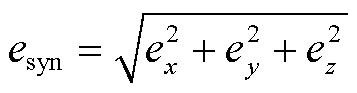 (31)
(31)
式中,∆Mx、∆My、∆Mz为反演计算出的磁信标磁矩分量与通过线圈电流和参数计算出的磁矩分量之间的偏差;Mx、My和Mz为通过线圈电流和参数计算出的磁矩三分量。可以看到,对传感器进行精确定位后,x轴磁矩反演误差由2.61%减小为2.44%,y轴磁矩反演误差由0.45%减小为0.30%,z轴磁矩反演误差由1.65%减小为1.04%;合成反演误差由3.12%减小为2.67%。
本节中对基于磁信标的磁传感器定位算法进行适当的补充,并指出后续研究内容。首先在磁传感器俯仰角为0°时,分别计算了无噪声和1 nT方差的噪声时(5次重复计算)的定位结果,见表5。
表5 俯仰角为0°时定位计算结果
Tab.5 Positioning results when pitch angle is 0°
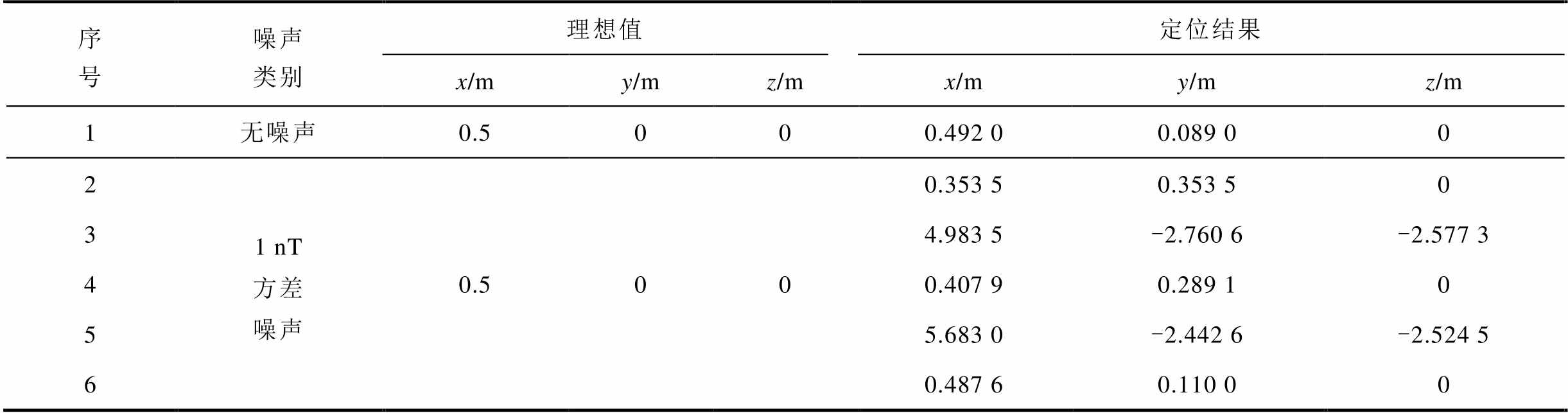
序号噪声类别理想值定位结果 x/my/mz/mx/my/mz/m 1无噪声0.5000.492 00.089 00 21 nT方差噪声0.5000.353 50.35350 34.983 5-2.760 6-2.577 3 40.407 90.289 10 55.683 0-2.442 6-2.524 5 60.487 60.110 00
可以看出,在无噪声时计算得到与理想值相近的定位结果,但是与表2中的数据相比,定位精度大幅降低。另外,在存在1 nT方差的噪声时,计算结果与理想值相差很大并且重复性很差,可以认为算法无效。在俯仰角为±π/2时,也会出现相似的结果。因此,当俯仰角为0°、±π/2时,无法通过本文提出的定位算法对磁传感器进行准确定位,即存在盲区,需要额外的磁源覆盖该区域,这将在后续研究工作中对该算法进行完善。另外,定位方法中假设了磁传感器的三轴方向与全局坐标系的三轴方向对齐,而在实际实测条件下必然存在一定的偏差。在后续研究中将全局坐标系和磁传感器三轴矢量之间的欧拉转换矩阵加入定解方程中,从而同时实现磁传感器的定位和定姿,进一步提高电磁设备磁特性的建模精度。最后,与Hu Chao等[22]和Dai Houde等[23]提出的解析式定位方法相比,本文提出的算法需要更多的测试数据,存在耗时的问题。这是因为本文采用了机械旋转法。实际上,还可以通过分别给三轴磁信标的x轴和y轴线圈提供一个正弦电流和余弦电流使其产生一个以z轴旋转的磁场,其效果与机械旋转法一致,并且可以显著减少测量时间。
针对电磁设备磁特性反演建模过程中,磁传感器的定位误差对建模精度的影响,提出了基于磁信标的磁传感器新型解析式定位方法。结论如下:
1)结合磁信标的球谐函数表达以及磁测数据的傅里叶系数,推导出了磁传感器空间坐标的显式表达式,克服了非线性最小二乘优化算法中存在局部优化解或与初始值相关的局限性。
2)经有限元法验证,本文中提出的磁传感器定位算法在方差为10 nT的高斯噪声条件下,1 000次重复计算的标准差为1.058 mm。
3)通过实验测试对通电线圈的磁矩进行反演,发现相比于传感器位置定位前,对传感器位置进行准确定位后,x轴磁矩反演误差由2.61%减小为2.44%,y轴磁矩反演误差由0.45%减小为0.30%,z轴磁矩反演误差由1.65%减小为1.04%;合成反演误差由3.12%减小为2.67%,验证了本文提出的定位算法可以支撑电磁设备磁特性模型的反演精度进一步提高。
参考文献
[1] 寇宝泉, 金银锡, 张赫, 等. 混合励磁直线电磁阻尼器的特性分析[J]. 中国电机工程学报, 2013, 33(24): 21, 143-151.
Kou Baoquan, Jin Yinxi, Zhang He, et al. Characteristic analysis of hybrid excitation linear electromagnetic dampers[J]. Proceedings of the CSEE, 2013, 33(24): 21, 143-151.
[2] 鲍晓华, 刘婕, 关博凯, 等. 考虑磁饱和的潜水感应电机励磁电感的解析计算[J]. 电工技术学报, 2025, 40(8): 2405-2417.
Bao Xiaohua, Liu Jie, Guan Bokai, et al. Analytical calculation of the magnetizing inductance of the submersible induction machine considering the magnetic saturation[J]. Transactions of China Electrotechnical Society, 2025, 40(8): 2405-2417.
[3] Kou Baoquan, Jin Yinxi, Zhang He, et al. Analysis and design of hybrid excitation linear eddy current brake[J]. IEEE Transactions on Energy Conversion, 2014, 29(2): 496-506.
[4] 曹婷, 石洪富, 刘峻志, 等. 永磁电动悬浮多工况下的电磁力特性研究[J]. 电工技术学报, 2024, 39(17): 5262-5277.
Cao Ting, Shi Hongfu, Liu Junzhi, et al. Investigation of electromagnetic force characteristics of permanent magnet electrodynamic suspension under multi-operation conditions[J]. Transactions of China Electro-technical Society, 2024, 39(17): 5262-5277.
[5] 佟文明, 杜绍雨, 贾建国, 等. 基于改进复相对磁导函数的开槽轴向磁通永磁电机气隙磁场解析模型[J]. 电工技术学报, 2024, 39(24): 7700-7711.
Tong Wenming, Du Shaoyu, Jia Jianguo, et al. Analytical model of air-gap magnetic field of slotted axial flux permanent magnet motor based on improved complex relative permeance function[J]. Transactions of China Electrotechnical Society, 2024, 39(24): 7700-7711.
[6] 王锁, 王宇. 基于磁场调制理论的无轴承永磁薄片电机偏心不平衡磁拉力分析及其补偿[J]. 电工技术学报, 2025, 40(6): 1746-1757.
Wang Suo, Wang Yu. Analysis and compensation of eccentric unbalanced magnetic pulling force in bearingless permanent magnet slice motors based on magnetic field modulation theory[J]. Transactions of China Electrotechnical Society, 2025, 40(6): 1746-1757.
[7] 何保委, 孙兆龙, 刘月林, 等. 一种舰船高精度感应磁场快速正演建模方法[J]. 电工技术学报, 2024, 39(6): 1589-1601.
He Baowei, Sun Zhaolong, Liu Yuelin, et al. A fast forward modeling method for high precision induced magnetic field of ships[J]. Transactions of China Electrotechnical Society, 2024, 39(6): 1589-1601.
[8] 王渝红, 周奕辰, 高仕林, 等. 非隔离型直流变压器的快速电磁暂态等效建模方法[J]. 电力系统自动化, 2025, 49(1): 161-171.
Wang Yuhong, Zhou Yichen, Gao Shilin, et al. Equivalent modeling method for fast electromagnetic transient of non-isolated DC transformers[J]. Automation of Electric Power Systems, 2025, 49(1): 161-171.
[9] Cochrane C J, Murphy N, Raymond C A, et al. Magnetic field modeling and visualization of the Europa clipper spacecraft[J]. Space Science Reviews, 2023, 219(4): 34.
[10] Sheinker A, Ginzburg B, Salomonski N, et al. Estimation of ship’s magnetic signature using multi-dipole modeling method[J]. IEEE Transactions on Magnetics, 2021, 57(5): 6500408.
[11] Weiss B P, Merayo J M G, Ream J B, et al. The psyche magnetometry investigation[J]. Space Science Reviews, 2023, 219(3): 22.
[12] Tsatalas S, Vergos D, Spantideas S T, et al. A novel multi-magnetometer facility for on-ground characterization of spacecraft equipment[J]. Measurement, 2019, 146: 948-960.
[13] Ding Xuezhen, Li Yuguo, Luo Ming, et al. Estimating locations and moments of multiple dipole-like magnetic sources from magnetic gradient tensor data using differential evolution[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 60: 5904913.
[14] Mehlem K, Wiegand A, Weickert S. New developments in magnetostatic cleanliness modeling[C]//2012 ESA Workshop on Aerospace EMC, Venice, Italy, 2012: 1-6.
[15] Tsatalas S, Livanos N A, Vergos D, et al. Suitcase multi-magnetometer facility, a portable system for DC and AC magnetic field measurements[C]//2022 ESA Workshop on Aerospace EMC (Aerospace EMC), Virtual, 2022: 1-6.
[16] Kakarakis S J, Spantideas S T, Kapsalis N C, et al. A software-based calibration technique for characterizing the magnetic signature of EUTs in measuring facilities [J]. IEEE Transactions on Electromagnetic Compatibility, 2017, 59(2): 334-341.
[17] Gutnik Y, Groper M. Terminal phase navigation for AUV docking: an innovative electromagnetic approach [J]. Journal of Marine Science and Engineering, 2024, 12(1): 192.
[18] 王玉芬, 周国华, 吴轲娜, 等. 消磁站水下磁传感器定位方法[J]. 电工技术学报, 2024, 39(4): 956-965.
Wang Yufen, Zhou Guohua, Wu Kena, et al. Localization method for underwater magnetic sensors in the fixed deperming station[J]. Transactions of China Electrotechnical Society, 2024, 39(4): 956-965.
[19] Yu Xiangqian, Wang Yongfu, Xiao Chijie, et al. A practicable method for calibrating a magnetic sensor array[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1007106.
[20] Ferrigno L, Laracca M, Milano F, et al. Magnetic localization system for short-range positioning: a ready-to-use design tool[J]. IEEE Transactions on Instrumentation and Measurement, 2020, 70: 6002309.
[21] Sheinker A, Ginzburg B, Salomonski N, et al. Localization in 3-D using beacons of low frequency magnetic field[J]. IEEE Transactions on Instrumentation and Measurement, 2013, 62(12): 3194-3201.
[22] Hu Chao, Song Shuang, Wang Xiaojing, et al. A novel positioning and orientation system based on three-axis magnetic coils[J]. IEEE Transactions on Magnetics, 2012, 48(7): 2211-2219.
[23] Dai Houde, Song Shuang, Zeng Xianping, et al. 6-D electromagnetic tracking approach using uniaxial transmitting coil and tri-axial magneto-resistive sensor [J]. IEEE Sensors Journal, 2018, 18(3): 1178-1186.
[24] Jin Yinxi, Yao Chengzhi, Li Liyi, et al. Magnetic characterization of spacecraft equipment in a magnetic shielded room[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 6006409.
[25] 孙芝茵, 李立毅, 潘东华, 等. 大型零磁装置屏蔽系数的计算方法[J]. 电工技术学报, 2018, 33(19): 4450-4457.
Sun Zhiyin, Li Liyi, Pan Donghua, et al. Calculation method of the shielding factor for large-scale zero magnetic field facility[J]. Transactions of China Electrotechnical Society, 2018, 33(19): 4450-4457.
[26] 李立毅, 孙芝茵, 潘东华, 等. 近零磁环境装置现状综述[J]. 电工技术学报, 2015, 30(15): 136-140.
Li Liyi, Sun Zhiyin, Pan Donghua, et al. Status reviews for nearly zero magnetic field environment facility[J]. Transactions of China Electrotechnical Society, 2015, 30(15): 136-140.
Research on Analytical Positioning Method of Magnetic Sensors for Inversion Modeling of Electromagnetic Devices
Abstract The inverse problem of the electromagnetic field refers to the reverse calculation of an equivalent mathematical model from the measurement data of the electromagnetic field generated by the electromagnetic equipment. This method is widely applied in fields such as deep space magnetic detection, geological exploration, and geophysical detection. Among them, the positioning accuracy of the magnetic sensor directly affects the inversion accuracy of the magnetic characteristics of the electromagnetic equipment. The positioning method of magnetic sensors based on the nonlinear least square optimization algorithm is relatively complex, involves a large amount of computation, and may obtain local optimal solutions. Meanwhile, the traditional analytical positioning algorithm is easily affected by random magnetic interference due to insufficient test data, resulting in relatively low measured positioning accuracy. To address the aforementioned issue, a novel analytical positioning method of magnetic sensors based on a magnetic beacon is proposed.
Firstly, a combination of five permanent magnets was taken as the equipment to be tested, and its equivalent model was established by using the spherical harmonic function method. Through this model, the influence of the positioning error of the magnetic sensor on its modeling accuracy was quantitatively analyzed.
Subsequently, in order to achieve high-precision positioning of the magnetic sensor, the magnetic field distribution generated by the magnetic beacon was obtained through the rotation test method and the corresponding Fourier coefficients were calculated. Then, the expression of the Fourier coefficients was simplified and calculated, and the explicit expression of the spatial coordinates of the magnetic sensor was derived.
Finally, the accuracy of the magnetic sensor positioning algorithm based on the magnetic beacon was verified respectively by the finite element method and experimental tests, thereby supporting the further improvement of the inversion accuracy of the magnetic characteristics of electromagnetic equipment.
The following conclusions can be drawn: (1) By combining the spherical harmonic function expression of the magnetic beacon and the Fourier coefficients of the magnetic measurement data, the explicit expression of the spatial coordinates of the magnetic sensor was derived. This overcame the limitations of local optimal solutions or correlation with the initial values in the nonlinear least squares optimization algorithm and exhibited stronger anti-random interference ability compared with the traditional analytical positioning algorithm. (2) Verified by the finite element method, the magnetic sensor positioning algorithm has a standard deviation of 1.058 mm under Gaussian noise with a variance of 10 nT after 1 000 repeated calculations. (3) Through experimental tests for inverting the magnetic moment of an energized coil, it was found that after accurately positioning the sensor position, the inversion error of the magnetic moment on the x-axis decreased from 2.61% to 2.44%, the inversion error of the magnetic moment on the y-axis decreased from 0.45% to 0.30%, the inversion error of the magnetic moment on the z-axis decreased from 1.65% to 1.04%, and the synthetic inversion error decreased from 3.12% to 2.67%. The results show that the positioning algorithm proposed in this paper can further improve the inversion accuracy of the magnetic characteristic model of electromagnetic equipment.
keywords:Magnetic characteristic inversion, magnetic sensor positioning, magnetic beacon, magnetic shielding room
中图分类号:TM153
DOI: 10.19595/j.cnki.1000-6753.tces.250757
航空科学基金(2024Z064077001)、前沿科学中心开放基金(BSAUEA5740402024)、国家自然科学基金(52477003)、黑龙江省自然科学基金(LH2024E046)和重点研发计划(2022YFA1604600)资助项目。
收稿日期 2025-05-06
改稿日期2025-05-21
金银锡 男,1989年生,副研究员,博士生导师,研究方向为零磁室内航天器磁测与建模、磁场发生装置的优化设计等。
E-mail:Jinyinxi@hit.edu.com(通信作者)
林生鑫 男,1994年生,副研究员,硕士生导师,研究方向为弱磁目标探测、磁传感器校准等。
(编辑 郭丽军)