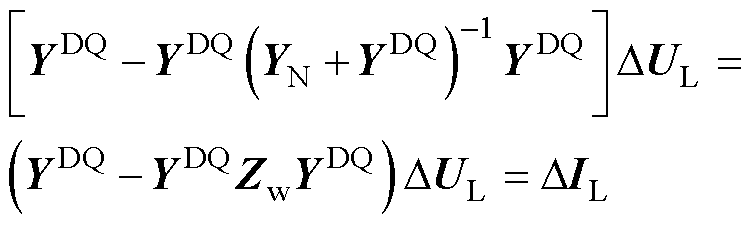
 为网络的节点阻抗矩阵,
为网络的节点阻抗矩阵, 为所有母线的电源导纳矩阵,= diag2
为所有母线的电源导纳矩阵,= diag2 , …,
, …,  , …,
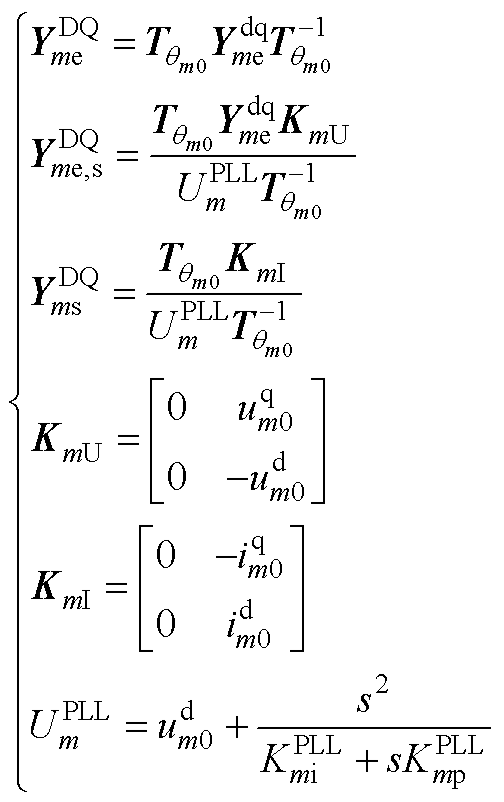
, …,  ,所有电源阻抗模型在连接之前需要将各自坐标系对齐到全局DQ坐标系[28]。其中全局DQ坐标系中母线m所连电源的导纳和阻抗矩阵和
,所有电源阻抗模型在连接之前需要将各自坐标系对齐到全局DQ坐标系[28]。其中全局DQ坐标系中母线m所连电源的导纳和阻抗矩阵和 分别为
分别为摘要 在含高比例逆变器资源(IBR)的新型电力系统中,构网型逆变器(GFM)和跟网型逆变器(GFL)共存。各种IBR之间不同时间尺度的控制器经过电网的闭环反馈作用相互影响,这使得IBR的同步动态(SD)特性变得越发复杂,对IBR的频率支撑强度分析提出了挑战。该文提出一种基于扩展阻抗模态分析(EMAI)的IBR频率支撑强度的量化评估方法。首先,证明了阻抗参与因子(IPF)和导纳参与因子(APF)的统一性,从而将能够分析IBR内部电磁动态(ED)和SD的EMAI方法的适用范围扩展到了含GFM和GFL的混合电源电力系统。其次,根据EMAI计算IBR中SD的主导模式扰动程度的最小允许放大倍数定义了频率支撑裕度(FSM),确定了IBR的频率支撑强度。在此基础上,通过FSM分析不同因素对IBR频率支撑强度的影响,为频率支撑强度的提升奠定了基础。最后,通过对单GFM/GFL无穷大系统和改造的IEEE 14母线系统进行仿真,结果验证了所提方法的有效性。根据信息的可获取性,所提方法可灵活地选择数据驱动或模型驱动的方式实现简便的计算,具有较好的工程应用价值。
关键词:频率支撑强度 同步动态 参与因子 抗扰动能力 阻抗模型
随着高比例逆变器资源(Inverter-Based Resource, IBR)的大量接入,新型电力系统的同步动态(Syn- chronous Dynamics, SD)特性发生了重大变化[1-3]。IBR控制策略和灵活的控制算法使其角度、频率和电压稳定性的作用范围得到了扩大,从而引出了关于稳定性分类的更多讨论[4-6]。系统的等效惯量下降,引起更剧烈的频率波动,从而导致系统频率响应的物理特性难以辨析[5-9]。此外,IBR根据并网控制算法的不同主要可分为构网型逆变器(Grid- Forming inverter, GFM)和跟网型逆变器(Grid- Following inverter, GFL),GFM和GFL截然不同的外特性增加了分析系统频率稳定的复杂度[10]。因此,构建新的系统建模和分析方法成为亟须解决的问题[11]。
对系统支撑强度的准确评估是判断系统能否安全稳定运行的重要基础。文献[12]指出系统支撑强度在稳定形态上包含频率支撑强度和电压支撑强度两个维度。其中,频率支撑强度是指系统惯量对扰动功率的抵御能力,具体体现在有功功率扰动下的频率变化速率,可以通过广义惯量[13]等指标进行量化。针对多机并联系统,文献[14]提出了一种拓展的P/w“导纳”模型来全面且精确地描述系统的有功频率响应特性。基于频率响应的统一结构简化模型,有学者提出一种考虑模态特征的参数自适应修改方法用于量化电力系统的频率性能[15]。此外,考虑频率时空分布特性以及系统对不同节点频率响应约束,文献[16]提出了电力系统对新能源机组惯量需求的分析方法和流程。然而,IBR存在灰盒或黑盒特性,这些基于物理模型的分析方法的适用性还有待探索。
为了避免复杂的物理建模,需要考虑基于数据驱动的分析方法。通过将动态模式分解引入电力系统惯量估计,文献[17]建立了惯量与系统动态特征的显式数学关系,提出了一种利用同步测量数据的分区域惯量估计框架。文献[18]将卷积神经网络引入电力系统惯量连续估计,提出了一种完全基于环境数据的无扰动估计框架,避免了传统方法对扰动事件或主动探测信号的依赖,实现了实时且连续的惯量估计。一种称为惯量比的实用化指标被提出,用于描述电网频率的支撑能力[19]。文献[20]通过构建频域惯量指标与时域惯量指标的数学模型,提出了一种基于小波变换的电力系统惯量估计方法,实现了同步机与电力电子变流器混合系统的普适性分析。此外,一种计及发电机惯量、新能源虚拟惯量和负荷等效惯量的新能源电力系统区域等效惯量实时评估方法解决了量测数据众多且获取困难的问题[21]。这些研究针对同步控制环路是功率直接影响频率的电源,而GFL的锁相环(Phase-Locked Loop, PLL)则是电压直接影响频率。GFL对系统频率响应的贡献也是不能忽略的,并且相关附加控制对GFL频率支撑能力在不同程度上能起到一定的影 响[22-24]。此外,一些新型IBR更多体现了GFM和GFL在控制上的结合[25-26]。传统意义上,它们既不属于GFM也不属于GFL,这使得GFM和GFL的概念得到了进一步的发展。因此需要寻求统一的建模框架以分析不同类型IBR的频率支撑强度。
为了考虑系统各元件经过电网闭环反馈的交互作用,以定量分析IBR的频率支撑强度,需要计及不同影响因素对系统稳定性的影响。基于状态空间模型的模态分析(Modal Analysis based on the State- Space model, MASS)通过使用参与因子(Partici- pation Factor, PF)量化每个状态变量对特定模式的贡献,然而黑盒模型和维数灾等问题限制了MASS在大规模系统中的应用[27]。目前阻抗分析方法得到了广泛的讨论。根据全系统动态导纳矩阵和全系统动态阻抗矩阵[28],基于阻抗模型的模态分析(Modal Analysis based on Impedance model, MAI)方法提出了阻抗参与因子(Impedance Participation Factor, IPF)和导纳参与因子(Admittance Participation Factor, APF)。IPF和APF将IBR作为一个整体考虑IBR整体动态对稳定性的影响[29-30],因此MAI无法深入分析IBR的内部动态。针对GFM的控制特性,文献[31]提出了阻抗形式的扩展阻抗模态分析(Extended Modal Analysis based on Impedance model, EMAI)方法,将GFM动态分解为由功率频率同步环(Power Frequency synchronization Loop, PFL)主导的SD和由电压控制环(Voltage Control Loop, VCL)主导的电磁动态(Electromagnetic Dynamics, ED),并在文献[29]的基础上提出了表征ED和SD参与程度的IPF。针对GFL的控制特性,文献[31]提出了导纳形式的EMAI方法,将GFL动态分解为由PLL主导的SD和由电流控制环(CurrentControl Loop, CCL)主导的ED,并在文献[30]的基础上提出了表征ED和SD参与程度的APF。然而,阻抗形式EMAI和导纳形式EMAI之间的关系目前尚不明确。此外当系统可能具有多个较弱阻尼的振荡模式时,考虑到不同IBR的SD对不同振荡模式具有不同参与程度,仅靠EMAI难以直接且公平地评价不同IBR的频率支撑强度。
为了满足日益增长的对IBR频率支撑强度进行精确量化评估的需求,本文提出了量化评估IBR频率支撑强度的新指标,主要贡献如下:
(1)证明了IPF和APF的统一性,从而建立了连接GFM内部动态阻抗参与因子和GFL内部动态导纳参与因子的桥梁。提出了IBR内部动态的统一模态分析,将EMAI的适用范围扩展到了含GFM和GFL的混合电源电力系统。
(2)提出了表征GFM和GFL频率支撑强度的指标:频率支撑裕度(Frequency Support Margin, FSM)。FSM由EMAI推导而来,充分考虑了系统各元件和IBR内部不同时间尺度控制环的相互作用。详细讨论了FSM的性质、计算原则和计算复杂度。FSM可根据IBR信息的可获取性灵活地选择数据驱动或模型驱动的方式计算,计算简便,适合实际工程应用。
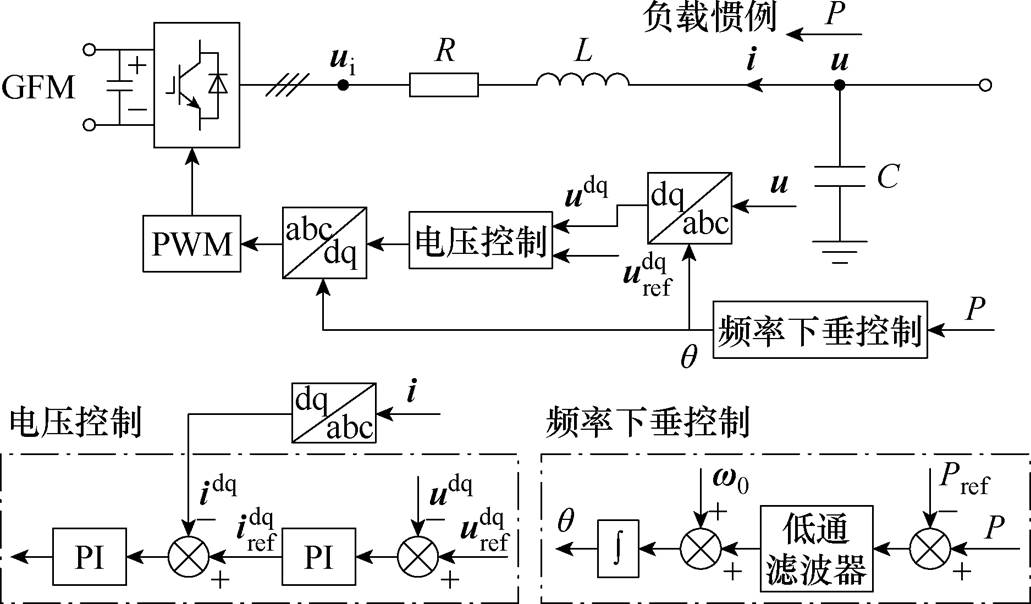
本文所用缩写词已汇总到附表1。全系统动态导纳矩阵如图1所示,图1中各变量物理意义参考文献[31]。考虑电力系统的全系统小信号阻抗模型,系统母线总数为n,为网络的节点阻抗矩阵,为所有母线的电源导纳矩阵,= diag2, …, , …, ,所有电源阻抗模型在连接之前需要将各自坐标系对齐到全局DQ坐标系[28]。其中全局DQ坐标系中母线m所连电源的导纳和阻抗矩阵和分别为
 (1)
(1)
图1 全系统动态导纳矩阵
Fig.1 Whole-system dynamic admittance matrix
式中,YmDD、YmDQ、YmQD和YmQQ为系统全局DQ坐标系中的四个分量;diag2( · )表示由二阶方阵生成对角矩阵。
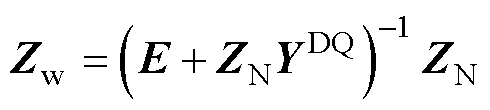
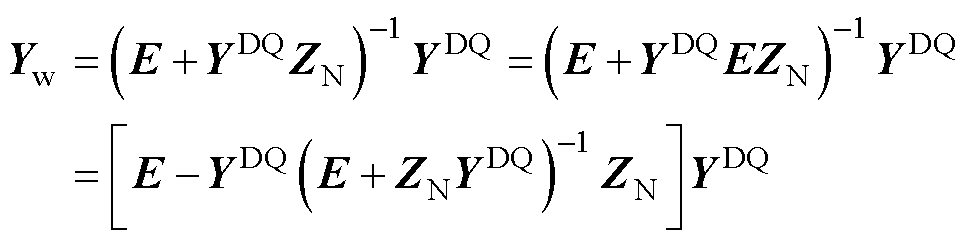
根据图1所示闭环反馈关系,全系统动态导纳矩阵Yw[28]为
 (2)
(2)
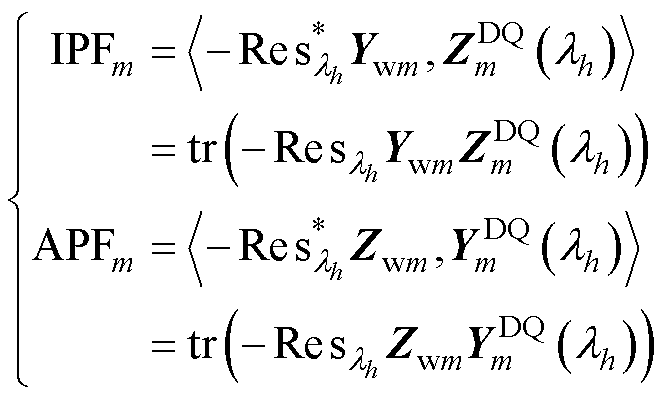
评估电源m对系统第h个特征值 的整体IPF记为IPFm[29],即
的整体IPF记为IPFm[29],即
 (3)
(3)
其中

式中,Ywm为矩阵Yw第2m-1至第2m行和第2m-1至第2m列中四个元素对应的分块矩阵;Ywm为整个系统在电源m所在回路的等效导纳; 为对Ywm在特征值处取留数;上标“*”表示对矩阵取共轭转置;
为对Ywm在特征值处取留数;上标“*”表示对矩阵取共轭转置; 表示Frobenius内积;
表示Frobenius内积; 和
和 分别为和的扰动量;
分别为和的扰动量; 为归一化扰动程度的标量。
为归一化扰动程度的标量。
MAI的IPFm只能将电源视为一个整体阻抗元件,将电源动态集中反映在电压电流端口,无法确定影响内部动态的电源主导控制环路,阻抗形式MAI适用于含多类型电源的场景。特别地,针对GFM的阻抗特点,文献[31]提出了一种阻抗形式EMAI方法。EMAI将GFM阻抗分解为受ED和SD单独影响或共同耦合影响的三个部分,具体表达式见附录。进一步通过阻抗微分运算得到GFM阻抗分解后的微分表达式为
 (4)
(4)
式中, 为电磁阻抗,且只与VCL有关,即只受ED影响;
为电磁阻抗,且只与VCL有关,即只受ED影响; 为同步阻抗,且只与PFL有关,即只受SD影响;
为同步阻抗,且只与PFL有关,即只受SD影响; 为混合阻抗,且受到VCL和PFL共同耦合效应的影响;
为混合阻抗,且受到VCL和PFL共同耦合效应的影响; 和
和 分别为阻抗形式EMAI方法中归一化ED和SD特征参数扰动程度的标量。结合式(3)和式(4)即可计算GFMm的ED和SD对系统第h个特征值的ED阻抗参与因子
分别为阻抗形式EMAI方法中归一化ED和SD特征参数扰动程度的标量。结合式(3)和式(4)即可计算GFMm的ED和SD对系统第h个特征值的ED阻抗参与因子 和SD阻抗参与因子
和SD阻抗参与因子 ,下标“1”表示使用EMAI计算的结果。
,下标“1”表示使用EMAI计算的结果。
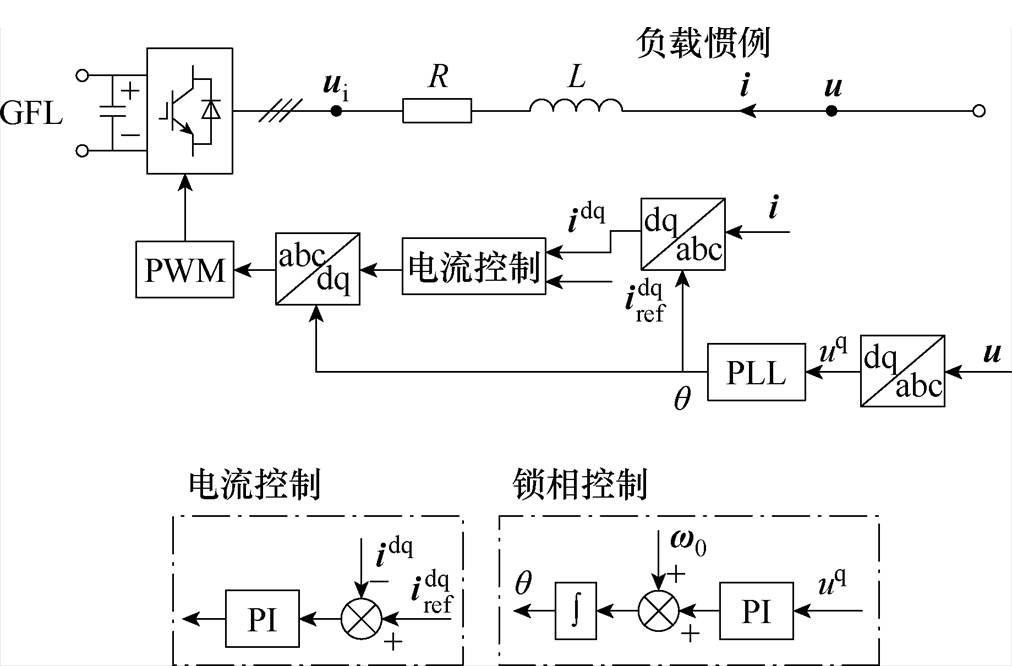
根据图2所示闭环反馈关系,全系统动态阻抗矩阵Zw[28]为
 (5)
(5)
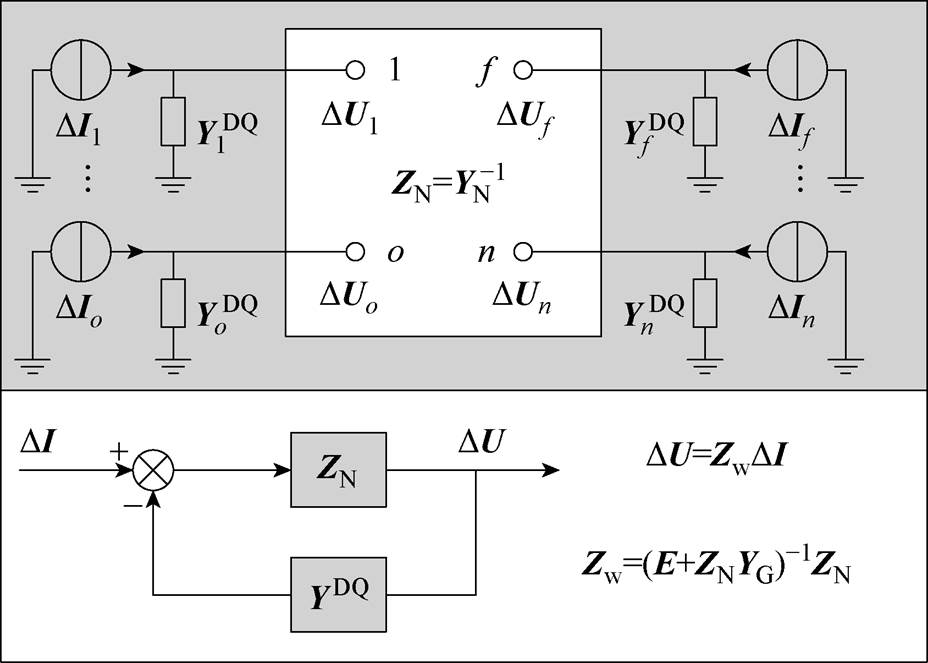
图2 全系统动态阻抗矩阵
Fig.2 Whole-system dynamic impedance matrix
评估电源m对系统第h个特征值的整体APF记为APFm[30],即
 (6)
(6)
其中

式中,Zwm为矩阵Zw第2m-1至第2m行和第2m-1至第2m列中四个元素对应的分块矩阵;Zwm为整个系统在母线m的等效阻抗; 为的扰动量;
为的扰动量; 为归一化扰动程度的标量。
为归一化扰动程度的标量。
导纳形式MAI依旧适用于含多类型电源的场景。然而,APFm依旧无法辨识电源内部动态。特别地,针对GFL同步环特点,文献[31]提出了一种导纳形式EMAI方法。将GFL导纳分解为受ED和SD单独影响或共同耦合影响的三个部分,具体表达式见附录。进一步通过导纳微分运算得到GFL导纳分解后的微分表达式为
 (7)
(7)
式中, 为电磁导纳,且只与CCL有关,即只受ED影响;
为电磁导纳,且只与CCL有关,即只受ED影响; 为同步导纳,且只与PLL有关,即只受SD影响;
为同步导纳,且只与PLL有关,即只受SD影响; 为混合导纳,且受到CCL和PLL共同耦合效应的影响;
为混合导纳,且受到CCL和PLL共同耦合效应的影响; 和
和 分别为导纳形式EMAI方法中归一化ED和SD特征参数扰动程度的标量。结合式(6)和式(7)即可计算GFLm的ED和SD对特征值的ED导纳参与因子
分别为导纳形式EMAI方法中归一化ED和SD特征参数扰动程度的标量。结合式(6)和式(7)即可计算GFLm的ED和SD对特征值的ED导纳参与因子 和SD导纳参与因子
和SD导纳参与因子 。
。
MAI方法通过IPFm或APFm评估电源m的参与程度,但无法分析电源内部动态的影响。在此基础上,针对GFM的电压源特性,阻抗形式EMAI方法提出了用 和
和 评估GFM内部ED和SD的参与程度。针对GFL,导纳形式EMAI方法提出了用和评估GFL内部ED和SD的参与程度。然而,考虑含有GFM和GFL的混合电源系统时,如何使用EMAI方法还有待研究。本节将证明阻抗参与因子和导纳参与因子的等价性。
评估GFM内部ED和SD的参与程度。针对GFL,导纳形式EMAI方法提出了用和评估GFL内部ED和SD的参与程度。然而,考虑含有GFM和GFL的混合电源系统时,如何使用EMAI方法还有待研究。本节将证明阻抗参与因子和导纳参与因子的等价性。
首先揭示全系统动态阻抗矩阵Zw和全系统动态导纳矩阵Yw的联系。从图2闭环反馈的输入输出关系可看出,Zw为电力系统常用的节点阻抗矩阵,而 为节点导纳矩阵。将图1电源的等效电压源和等效阻抗交换位置,电路的电压电流关系依旧满足原先的闭环反馈关系,如图3所示。
为节点导纳矩阵。将图1电源的等效电压源和等效阻抗交换位置,电路的电压电流关系依旧满足原先的闭环反馈关系,如图3所示。
与电源连接到网络的节点o不同,图3增加了节点 表示电源o的内电动势节点,因此Yw即表示所有电源内电动势节点的节点导纳矩阵。此外,直接建立包含电源网络节点o(o=1, 2,…, n)和电源内电动势节点(
表示电源o的内电动势节点,因此Yw即表示所有电源内电动势节点的节点导纳矩阵。此外,直接建立包含电源网络节点o(o=1, 2,…, n)和电源内电动势节点( )的扩展节点导纳矩阵Y为
)的扩展节点导纳矩阵Y为
 (8)
(8)
式中, 为2n×1阶全零矩阵;
为2n×1阶全零矩阵; 和
和 分别为图1和图3中的等效电压源和内电动势节点等效注入电流;
分别为图1和图3中的等效电压源和内电动势节点等效注入电流; 为母线电压。电源等效为戴维南模型,故网络母线节点注入电流为零。
为母线电压。电源等效为戴维南模型,故网络母线节点注入电流为零。
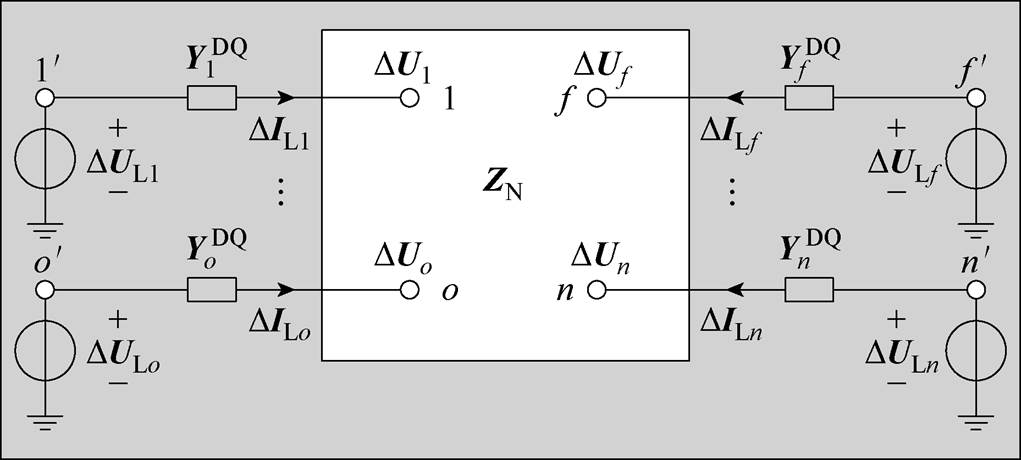
图3 全系统动态导纳矩阵的等效模型
Fig.3 Equivalent model of the whole-system dynamic admittance matrix
将式(8)中所有网络母线节点消去,得
 (9)
(9)
结合图1和式(9),Yw和Zw的关系为
 (10)
(10)
这从物理结构上解释了Yw和Zw的关系。
此外,利用式(11)所示矩阵求逆,并采用求逆引理可将式(2)重新写为式(12)。
 (11)
(11)
 (12)
(12)
式中,a、b、c和d为任意矩阵,它们在维度上是符合矩阵乘法规则的相容矩阵。
因此,从数学矩阵变换的角度依旧可以证明Yw和Zw满足式(10)的关系。故Y中第m个二阶对角矩阵Ywm可写为
 (13)
(13)
将Frobenius内积用矩阵的迹重新表示,即式(3)和式(6)的IPFm和APFm重新写为
 (14)
(14)
式中,tr( )表示矩阵的迹。
对式(13)在特征值处取留数,得
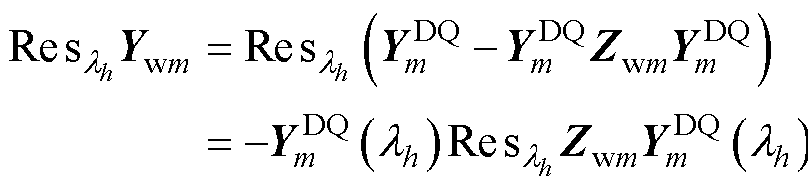 (15)
(15)
注意到式(16)恒成立。
 (16)
(16)
矩阵乘积的迹与乘积的顺序无关,将式(15)代入式(14)的IPFm可得
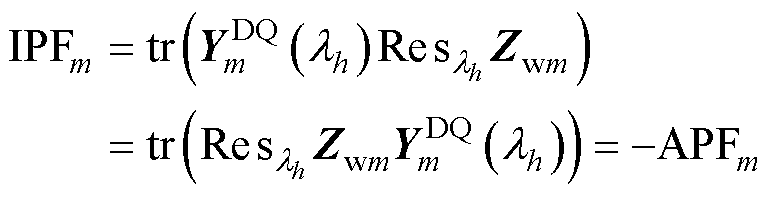 (17)
(17)
因此,导纳参与因子和阻抗参与因子在数值上是互为相反数的。此外,对式(16)取微分可得

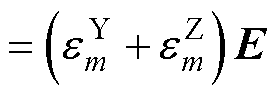 (18)
(18)
式中, 为2×2阶全零方阵。
为2×2阶全零方阵。
和互为相反数,故用式(3)或式(6)计算电源整体动态的参与程度是一致的。
对于MAI方法,APFm和IPFm的统一性表明,可以灵活地选择利用阻抗或导纳模型对电源的整体动态进行参与评估。因此,对IBR(无论是GFM还是GFL)进行整体动态参与评估时使用阻抗形式MAI和导纳形式MAI均能达到一致的评估效果,这建立了连接IBR阻抗/导纳整体动态参与评估的桥梁,赋予了全系统动态建模更多的灵活性。
对于由MAI方法进一步发展而来的EMAI方法,通过对GFL的导纳或GFM的阻抗进行分解实现了对逆变器内部动态的分解,从而可以从APFm(或IPFm)中导出表征GFL(或GFM)内部动态ED和SD的参与因子APFme1和APFms1(或IPFme1和IPFms1)。值得注意的是,由导纳和阻抗计算电源整体动态参与评估具有一致性,故通过对IBR导纳或阻抗分解得到的内部动态参与因子也是一致的。因此,2.1节APFm和IPFm的统一性证明也建立了分析GFM和GFL的内部动态ED和SD的联系,即GFM的APFme1和APFms1与GFL的IPFme1和IPFms1在数值上是可比较的。因此,适用于GFM内部动态的阻抗形式EMAI方法和适用于GFL导纳形式的EMAI方法完成了统一,EMAI方法的适用范围扩展到了含GFM和GFL的混合电源电力系统。
综上所述,针对MAI的整体参与,统一用PF表示IPF或APF,即PFm=IPFm APFm,“”表示或者;针对EMAI的ED参与,统一用PFme1表示IPFme1或APFme1,即PFme1=IPFme1APFme1;针对EMAI的SD参与,统一用PFms1表示IPFms1或APFms1,即PFms1=IPFms1APFms1。对于MASS方法,通过累加不同动态的状态变量参与因子,从而得到表征ED和SD的参与因子PFme2和PFms2[31]。图4进一步总结了这一类模态分析方法的逻辑关系。
APFm,“”表示或者;针对EMAI的ED参与,统一用PFme1表示IPFme1或APFme1,即PFme1=IPFme1APFme1;针对EMAI的SD参与,统一用PFms1表示IPFms1或APFms1,即PFms1=IPFms1APFms1。对于MASS方法,通过累加不同动态的状态变量参与因子,从而得到表征ED和SD的参与因子PFme2和PFms2[31]。图4进一步总结了这一类模态分析方法的逻辑关系。
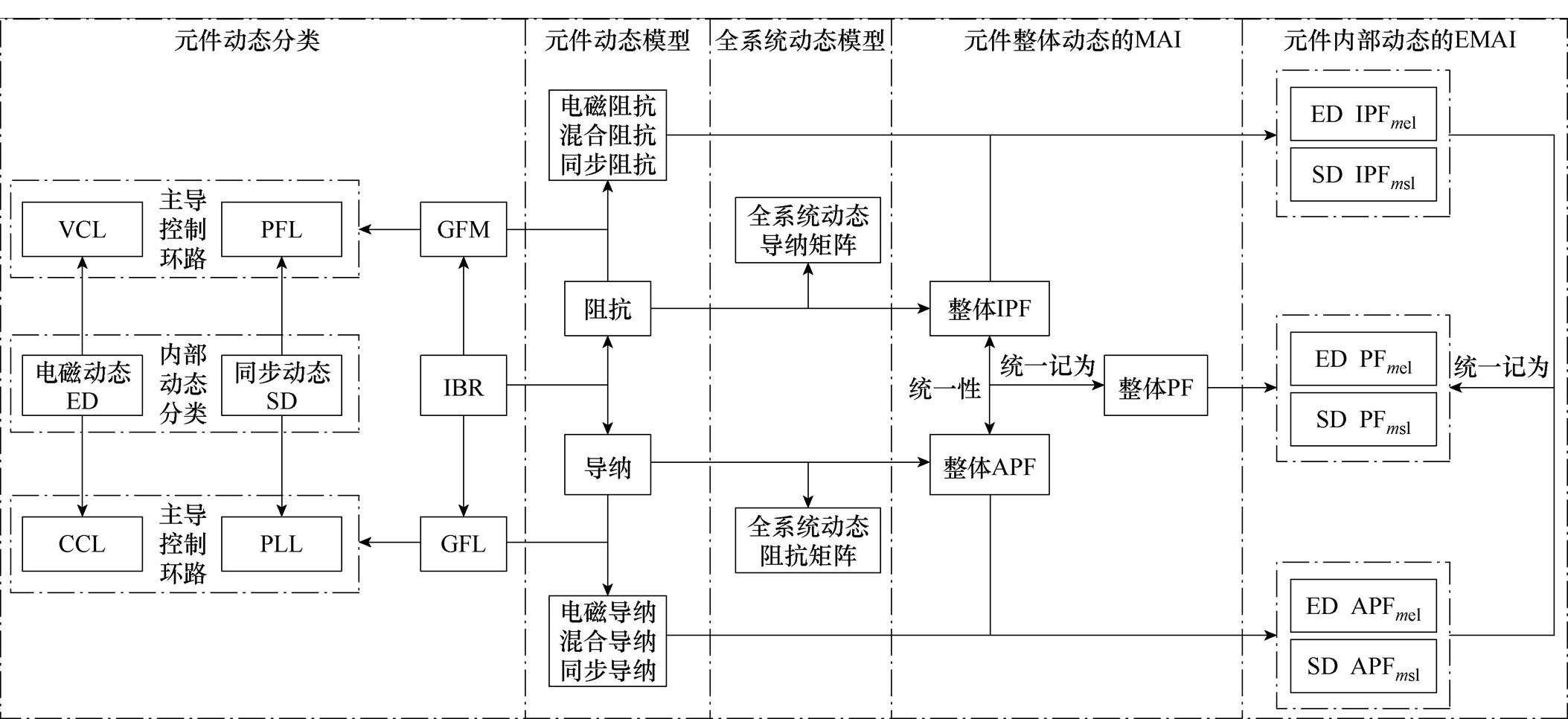
图4 元件参与分析方法逻辑关系
Fig.4 Component participation analysis method framework diagram
MASS作为最经典的电力系统动态影响因素评估方法[27],在本文被用于验证MAI和EMAI方法鲁棒性。为了进一步对比MAI、EMAI和MASS计算出的参与因子,比较不同方法的特点,定义了参与比(Participation Ratio, PR)对不同方法得到的参与因子进行数值归一化,如式(19)所示。下标l=1或2分别表示根据EMAI和MASS方法计算的参与因子或参与比。
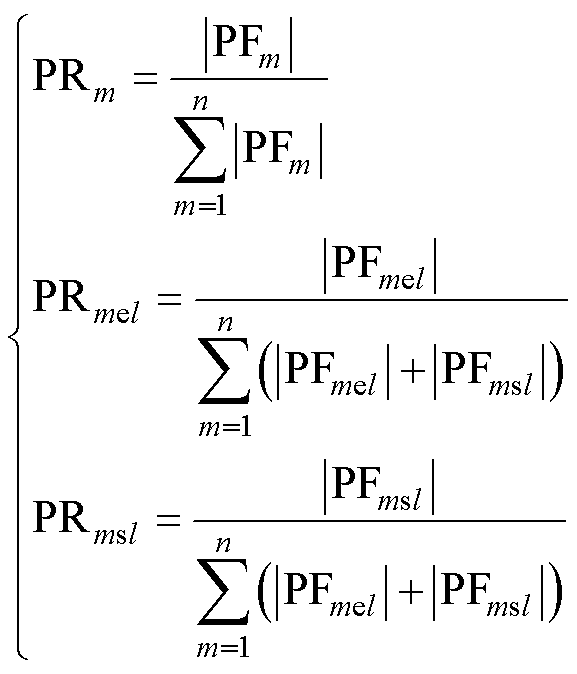 (19)
(19)
式中, 表示取绝对值。
表示取绝对值。
利用PRme1和PRms1确定影响系统稳定性的主导电源和电源内部主导动态,继而计算参数参与因子(Parameter Participation Factor, PPF)确定影响动态的关键控制参数。PPF本质上是特征值对控制参数的灵敏度(偏导数),因此可以通过PPF给出指导改善系统阻尼和提高系统稳定性的具体措施。实际应用时常常需要挑选PPF实部绝对值最大的控制参数,因为该参数对于提高振荡模式的阻尼(使振荡模式远离虚轴)最为灵敏有效。所选参数的PPF实部为负/正则表明需要增大/减小该参数的数值。
 (20)
(20)
EMAI方法实现了解耦分析逆变器内部动态对稳定性的影响。基于此,本节针对逆变器的SD,定义评估逆变器频率支撑强度的性能指标:频率支撑裕度FSM。
考虑GFM的SD阻抗参与因子,即联立式(3)和式(4)可得
 (21)
(21)
对于GFL,联立式(6)和式(7),则有
 (22)
(22)
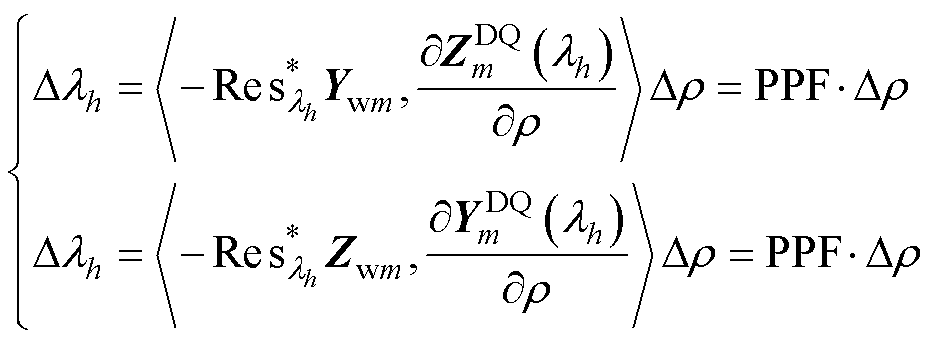
式(21)和式(22)计算了GFM和GFL的SD引起的特征值的变化量。考虑系统稳定的保守性,的最大数值 取特征值
取特征值 离虚轴的长度,其中
离虚轴的长度,其中 和
和 分别是的实部和虚部。则有
分别是的实部和虚部。则有
 (23)
(23)
因此,GFM或GFL的SD的扰动程度可记为
 (24)
(24)
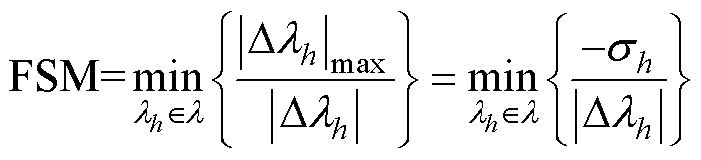
式(24)的倒数 称为SD的扰动程度允许放大倍数。为了公平且充分地比较所有振荡模式,在所有特征值中,逆变器SD的扰动程度允许放大倍数的最小值被定义为频率支撑裕度FSM,即
称为SD的扰动程度允许放大倍数。为了公平且充分地比较所有振荡模式,在所有特征值中,逆变器SD的扰动程度允许放大倍数的最小值被定义为频率支撑裕度FSM,即
 (25)
(25)
式中, 表示特征值在所有特征值
表示特征值在所有特征值 范围内求取表达式的最小值。值得注意的是,这里需要排除为0的特征值(实部虚部均为0),因为它们一般出现在系统不可观或不可控和系统状态变量存在冗余的情况。
范围内求取表达式的最小值。值得注意的是,这里需要排除为0的特征值(实部虚部均为0),因为它们一般出现在系统不可观或不可控和系统状态变量存在冗余的情况。
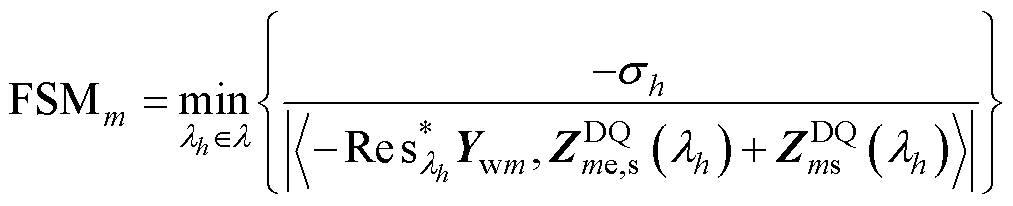
结合式(21)~式(25),对于电源m,GFM和GFL的FSM分别如式(26)和式(27)所示,统一记为FSMm。
 (26)
(26)
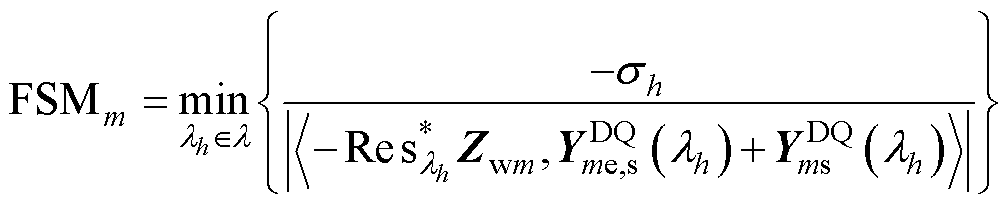 (27)
(27)
FSM通过EMAI方法推导而来,FSM是一个无量纲的数,具有直观的物理意义,表示逆变器SD的抗干扰能力。FSM值越大,逆变器SD的参与程度越低,逆变器SD对外界扰动的灵敏度越低,则逆变器SD具有更强的抗干扰能力,因此逆变器具有更高的频率支撑强度和更大的频率稳定裕度。当FSM为负时,系统已经小信号不稳定,此时FSM越小表明逆变器的频率不稳定程度越高。
式(25)中特征值实部体现了系统的全局稳定性,而从式(21)和式(22)可知,结合了系统在逆变器m端口的局部等效信息(Ywm为整个系统在逆变器m所在回路的等效导纳,Zwm为整个系统在逆变器m端口的等效阻抗),这体现了逆变器与电力网络的交互作用。式(21)或式(22)中的 或
或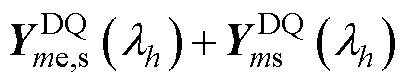 则是表征GFM或GFL的SD的等效阻抗或导纳。因此,FSM既包含了全局稳定信息,还从不同电源的不同视角观测系统频率稳定性,这有助于定位影响系统频率稳定性的动态主导电源,使系统运行人员可以深入洞察频率的空间分布特性,从而有针对性地提高系统局部频率支撑强度。
则是表征GFM或GFL的SD的等效阻抗或导纳。因此,FSM既包含了全局稳定信息,还从不同电源的不同视角观测系统频率稳定性,这有助于定位影响系统频率稳定性的动态主导电源,使系统运行人员可以深入洞察频率的空间分布特性,从而有针对性地提高系统局部频率支撑强度。
值得注意的是,FSM作为频率支撑强度的新指标,重在刻画逆变器SD对扰动的抵抗能力,这只是频率强度的一个部分。更为全面的频率强度不仅包含频率支撑强度,还包含频率调节强度[12],分析逆变器调频能力也是当前研究的热点[32-35]。
根据式(25)中的定义,FSM的计算需要在所有特征值范围内求取。然而,在实际计算中,不同逆变器对各种振荡模式的灵敏度是不同的(即逆变器对不同振荡模式的参与程度不同)。同时,不同逆变器的SD对稳定性的影响程度也不同,这导致不同逆变器的频率振荡更容易被某些特定的振荡模式激发,即某些振荡模式的扰动更容易被观测到。因此,FSM只需要在特定的振荡模式范围内计算即可。
首先,高频振荡通常会被线路很好的阻尼,这导致高频振荡不容易在网络中传播。因此高频振荡不在所考察的范围内。本文给出的案例研究中,只考虑了低于200 Hz的振荡模式。其次,只有具有较低阻尼的模式才更可能被激发,这些模式通常表现为系统极点图中更接近虚轴的极点或其所对应的相关参与因子很大。因此,通常不考虑远离虚轴且阻尼较大的模式,这大大缩小了特征值的选择范围。最后,FSM是小信号的频率支撑强度指标,其应用依赖多个可信的工作点或者实时在线测量估算。
对于逆变器m而言,以GFM为例,单个频率支撑强度指标FSMm的计算只需 、
、 和
和 。GFM的整体阻抗记为
。GFM的整体阻抗记为 ,系统其余部分在GFM端口的等效阻抗记为
,系统其余部分在GFM端口的等效阻抗记为 。根据图1中的电路关系,
。根据图1中的电路关系, =+成立。这意味着在大规模电力系统中,计算只需要连接到母线m的GFM阻抗和系统其余部分在该端口的等效阻抗。
=+成立。这意味着在大规模电力系统中,计算只需要连接到母线m的GFM阻抗和系统其余部分在该端口的等效阻抗。
式(4)中, 。文献[31]指出,可以从中分解得到,即将同步环的频率参考信号设置为恒定值,此时测量所得即=。当然还可以灵活地选择通过文献[31]中的具体表达式模型驱动直接计算。因此,通过数据驱动计算FSMm时,单个指标FSMm的计算复杂度与系统规模解耦,即单个指标的计算复杂度等效为单机系统的计算复杂度。值得注意的是,FSM在实时计算中的主要困难来源于对应母线端口的阻抗的测量。特征系统实现算法从系统暂态期间的时域数据识别阻抗模型[36],开辟了一条利用时域数据(如PMU测量的数据)直接提取电源等效阻抗模型和系统其余部分在电源端口等效阻抗模型的途径,从而进一步实现FSM的计算。此外,一种并网逆变器dq阻抗灰箱辨识方法实现了基于并网逆变器端口电压、电流时域数据,对不同运行工作点下的dq阻抗进行在线辨识[37]。一种逆变器网络的机器学习框架[38],能够在较为广泛的工作范围内刻画逆变器阻抗模型,即使数据有限,采用迁移学习,这种机器学习框架可以从基于物理的模型推断到真实世界的模型。
。文献[31]指出,可以从中分解得到,即将同步环的频率参考信号设置为恒定值,此时测量所得即=。当然还可以灵活地选择通过文献[31]中的具体表达式模型驱动直接计算。因此,通过数据驱动计算FSMm时,单个指标FSMm的计算复杂度与系统规模解耦,即单个指标的计算复杂度等效为单机系统的计算复杂度。值得注意的是,FSM在实时计算中的主要困难来源于对应母线端口的阻抗的测量。特征系统实现算法从系统暂态期间的时域数据识别阻抗模型[36],开辟了一条利用时域数据(如PMU测量的数据)直接提取电源等效阻抗模型和系统其余部分在电源端口等效阻抗模型的途径,从而进一步实现FSM的计算。此外,一种并网逆变器dq阻抗灰箱辨识方法实现了基于并网逆变器端口电压、电流时域数据,对不同运行工作点下的dq阻抗进行在线辨识[37]。一种逆变器网络的机器学习框架[38],能够在较为广泛的工作范围内刻画逆变器阻抗模型,即使数据有限,采用迁移学习,这种机器学习框架可以从基于物理的模型推断到真实世界的模型。
如果完全通过模型驱动的方法计算FSMm,则最耗时的步骤涉及矩阵乘法和求逆,其计算复杂度为O(n3)或更小,这与潮流计算常用的牛顿拉夫逊方法的计算复杂度相同。故可能将该方法应用于大规模电力系统是可以接受的。综上所述,FSMm计算简便,该方法在工程上具有较强的应用价值。
本节通过三个不同规模的系统来展示所提方法的性能。单GFM和GFL连无穷大系统演示了FSM能够充分捕捉到不同时间尺度控制器、GFM遇强电网和GFL遇弱电网引起的频率稳定性的能力。改造的IEEE 14母线系统用于验证EMAI在混合电源场景下的适用性,并展现了FSM在较大规模电力系统中指导逆变器频率支撑强度提升的有效性。根据大量的仿真结果,初步认为FSM=1.5是区分IBR频率支撑强度强弱的划分。所有仿真模型和数据均使用开源软件包Simplus Grid Tool生成[10]。
附图1给出了GFM的控制结构。案例1~7的参数设置情况见表1。表1中,案例1~7被分为了三组实验,其中案例1被设置为每组实验的基准案例。在案例1、2和3中只有电网阻抗Zg发生改变,用以演示指标FSM能够反映GFM遇强电网的小信号不稳定性。在案例1、4和5中只有VCL比例增益 和积分增益
和积分增益 发生改变,在案例1、6和7中只有PFL下垂增益
发生改变,在案例1、6和7中只有PFL下垂增益 发生改变,用以演示指标FSM能够反映GFM内部不同时间尺度控制器引起的小信号不稳定性。附表2给出了GFM其余参数的设置情况。
发生改变,用以演示指标FSM能够反映GFM内部不同时间尺度控制器引起的小信号不稳定性。附表2给出了GFM其余参数的设置情况。
表1 案例1~7的参数设置情况
Tab.1 Parameter settings of case 1 to 7
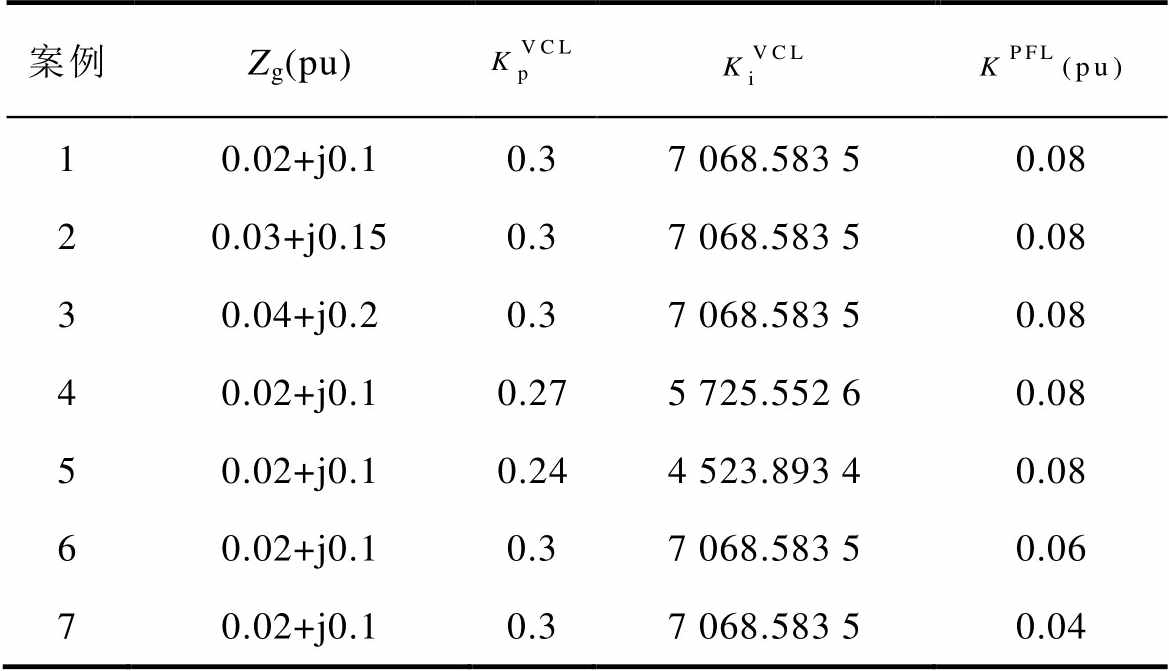
案例Zg(pu) 10.02+j0.10.37 068.583 50.08 20.03+j0.150.37 068.583 50.08 30.04+j0.20.37 068.583 50.08 40.02+j0.10.275 725.552 60.08 50.02+j0.10.244 523.893 40.08 60.02+j0.10.37 068.583 50.06 70.02+j0.10.37 068.583 50.04
表2给出了案例1~7的FSM与取值的特征值(主导模式)。案例1的FSM对应的模式为2p(-1.16+j15.11)。在0.1 s时,逆变器电压信号中添加幅值为0.05(pu)且频率分别为10.11、15.11、20.11和25.11 Hz的扰动信号,不同扰动频率的GFM频率响应波形如图5所示。扰动信号频率为15.11 Hz时,GFM的频率响应波形振荡幅值最大,这表明主导模式才能给GFM的SD造成最大的影响。除特殊说明外,后文所用扰动信号的幅值为0.05(pu)且频率与FSM对应的主导模式相同(考虑到有功阶跃扰动的频谱不均匀,本文采用频谱单一的强迫振荡扰动,从而满足实验设置的公平性)。
表2 案例1~7的FSM与取值的特征值
Tab.2 FSM and eigenvalue points of case 1 to 7
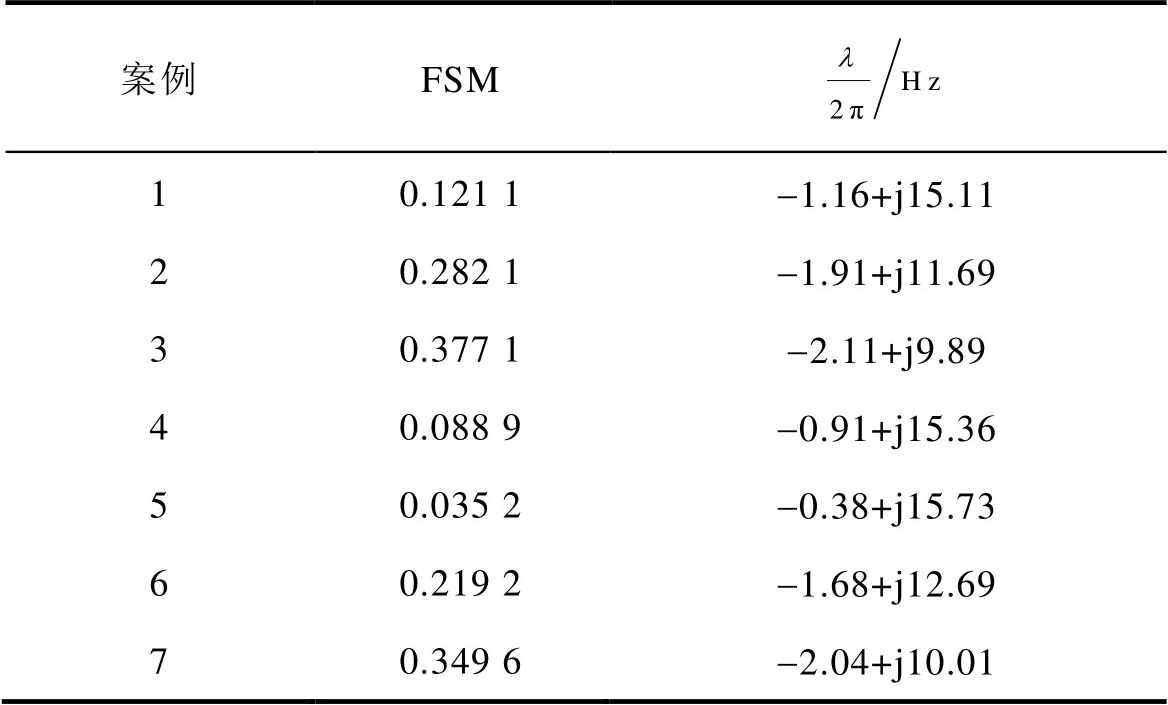
案例FSM 10.121 1-1.16+j15.11 20.282 1-1.91+j11.69 30.377 1-2.11+j9.89 40.088 9-0.91+j15.36 50.035 2-0.38+j15.73 60.219 2-1.68+j12.69 70.349 6-2.04+j10.01
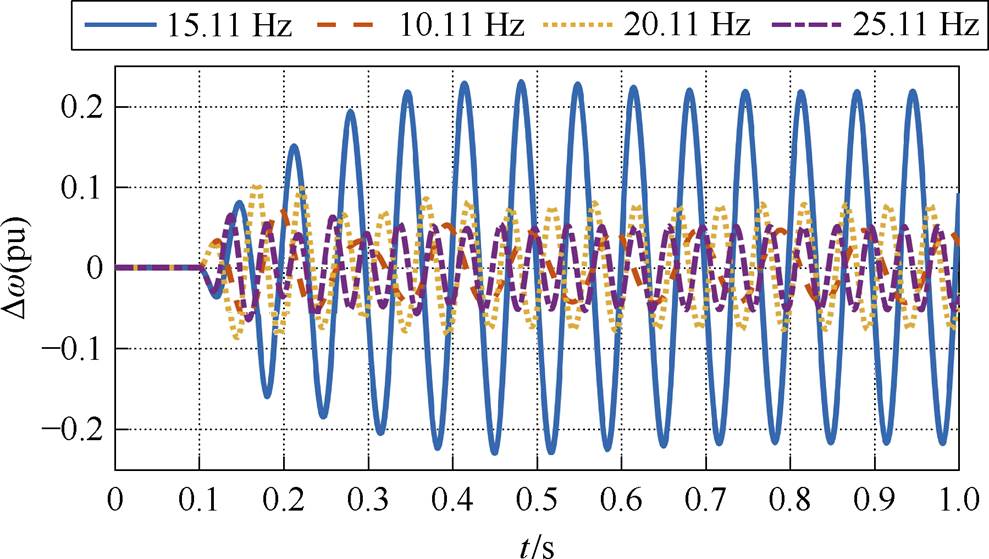
图5 不同扰动频率的GFM响应波形
Fig.5 Response waveforms of GFM under different disturbance frequencies
此外,图6给出了三组实验在不同条件下的振荡波形,振荡波形的幅值越大,表明GFM的频率支撑强度越弱。其中,较小的电网阻抗、较小的VCL比例增益和积分增益(较小的VCL带宽)以及较大的PFL下垂增益均会导致GFM的频率抗干扰能力下降,即频率支撑强度下降。仿真波形和FSM所表示的频率支撑强度一致,充分说明了FSM具有对不同原因引起的GFM小信号不稳定的指示作用。
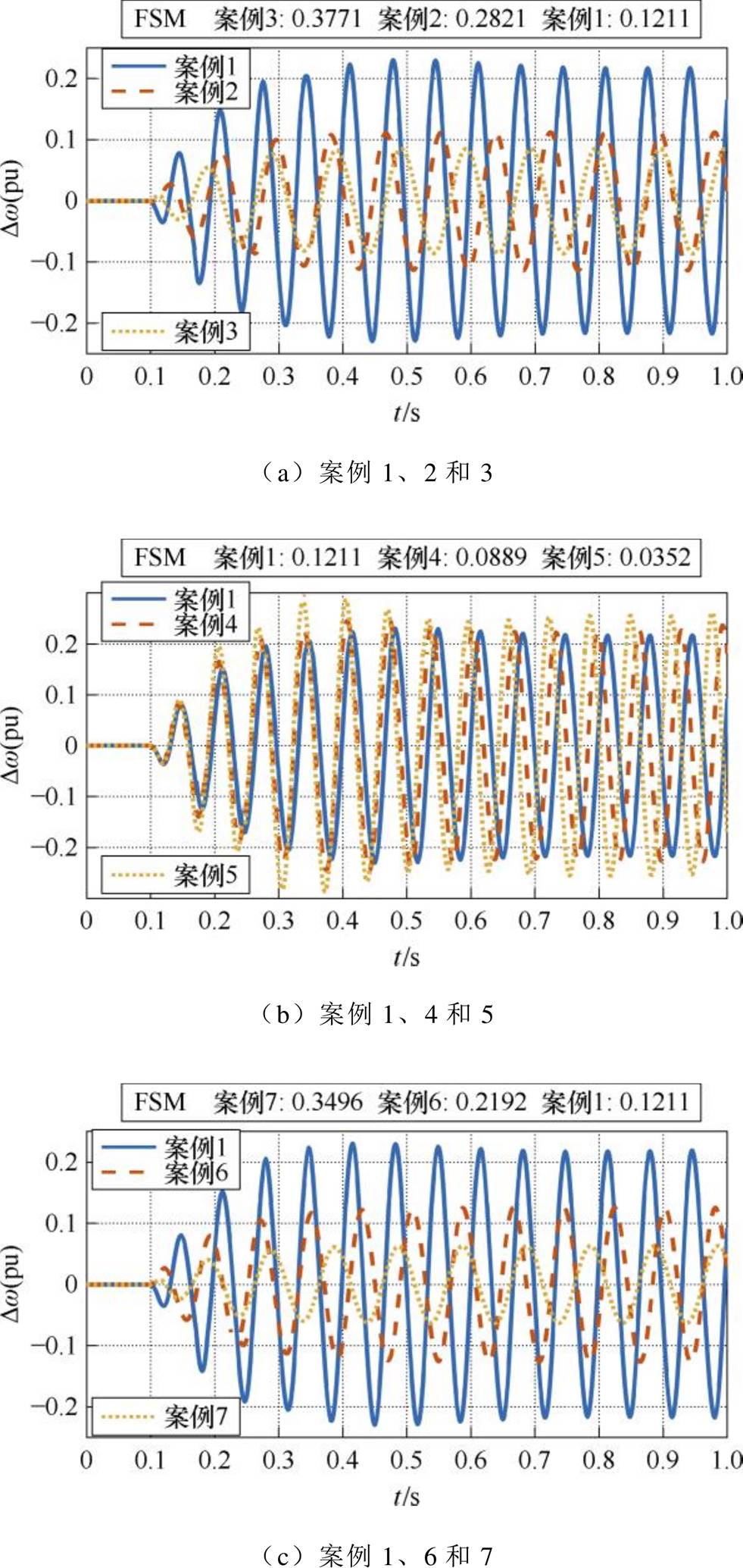
图6 案例1~7的GFM响应波形
Fig.6 Response waveforms of GFM for case 1 to 7
附图2给出了GFL的控制结构。案例8~14的参数设置情况见表3。表3中,案例8~14被分为了三组实验,其中案例8被设置为每组实验的基准案例。在案例8、9和10中只有电网阻抗Zg发生改变,用以演示指标FSM能够反映GFL遇弱电网的小信号不稳定性。在案例8、11和12中只有CCL比例增益 和积分增益
和积分增益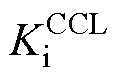 发生改变,在案例8、13和14中只有PLL比例增益
发生改变,在案例8、13和14中只有PLL比例增益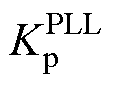 和积分增益
和积分增益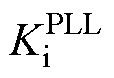 发生改变,用以演示指标FSM能够反映GFL内部不同时间尺度控制器引起的小信号不稳定性。附表2给出了GFL其余参数的设置情况。
发生改变,用以演示指标FSM能够反映GFL内部不同时间尺度控制器引起的小信号不稳定性。附表2给出了GFL其余参数的设置情况。
表3 案例8~14的参数设置情况
Tab.3 Parameter settings of case 8 to 14
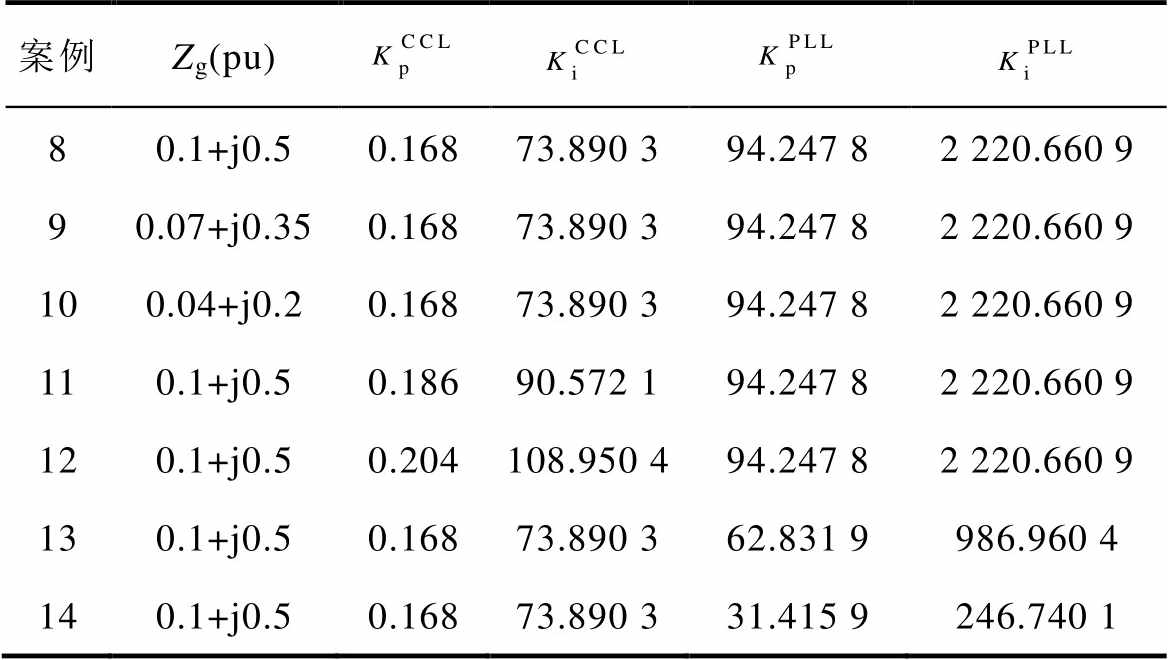
案例Zg(pu) 80.1+j0.50.16873.890 394.247 82 220.660 9 90.07+j0.350.16873.890 394.247 82 220.660 9 100.04+j0.20.16873.890 394.247 82 220.660 9 110.1+j0.50.18690.572 194.247 82 220.660 9 120.1+j0.50.204108.950 494.247 82 220.660 9 130.1+j0.50.16873.890 362.831 9986.960 4 140.1+j0.50.16873.890 331.415 9246.740 1
表4给出了案例8~14的FSM与取值的特征值。案例8的FSM对应的模式为2p(-0.32+j18.06)。在0.1 s时,逆变器电压信号中添加幅值为0.05(pu)且频率分别为13.06、18.06、23.06和28.06 Hz的扰动信号,不同扰动频率的GFL频率响应波形如图7所示。扰动信号频率为18.06 Hz时,GFL的频率响应波形振荡幅值最大,这表明主导模式才能给GFL的SD造成最大的影响。
表4 案例8~14的FSM与取值的特征值
Tab.4 FSM and eigenvalue points of case 8 to 14
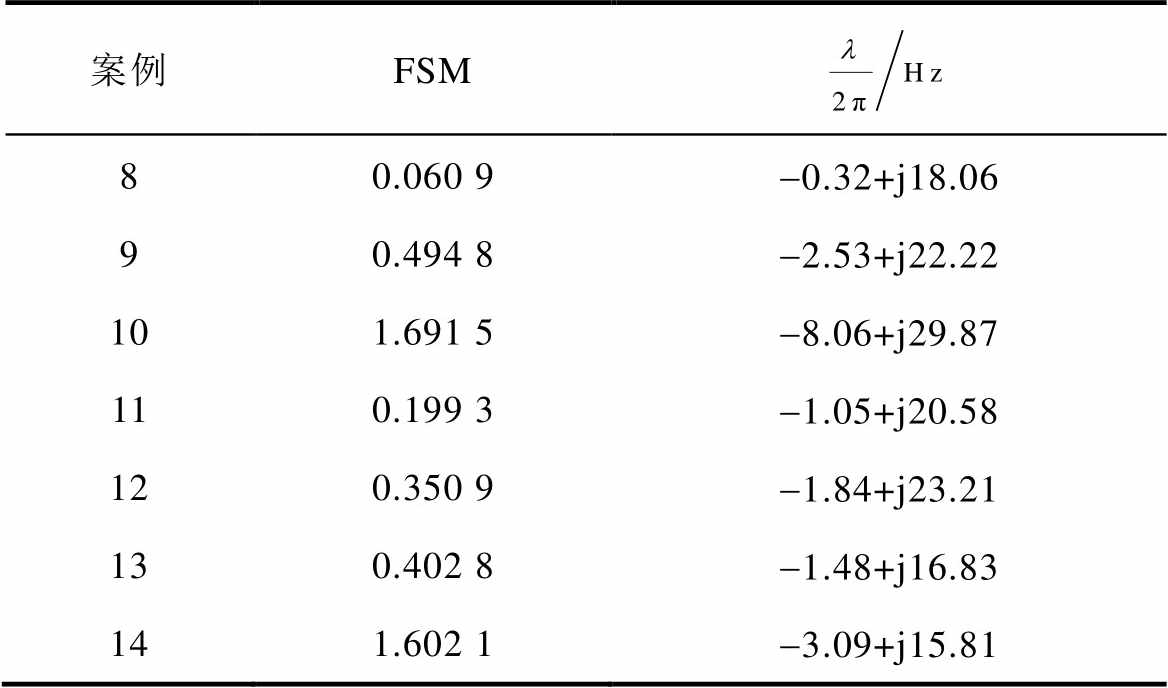
案例FSM 80.060 9-0.32+j18.06 90.494 8-2.53+j22.22 101.691 5-8.06+j29.87 110.199 3-1.05+j20.58 120.350 9-1.84+j23.21 130.402 8-1.48+j16.83 141.602 1-3.09+j15.81
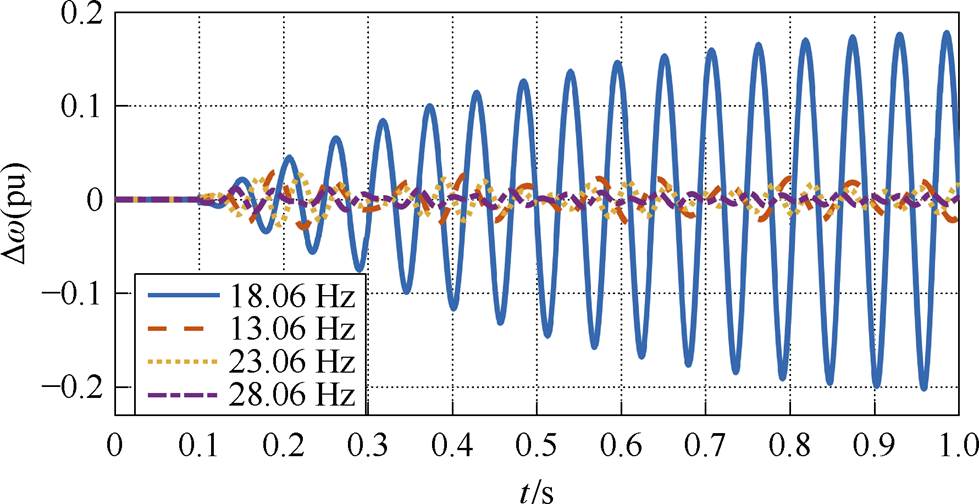
图7 不同扰动频率的GFL响应波形
Fig.7 Response waveforms of GFL under different disturbance frequencies
此外,图8给出了三组实验在不同条件下的振荡波形,振荡波形的幅值越大,表明GFL的频率支撑强度越弱。其中,较大的电网阻抗、较小的CCL比例增益和积分增益(较小的CCL带宽)以及较大的PFL比例增益和积分增益(较大的CCL带宽)均导致GFL的频率支撑强度下降。仿真波形和FSM所表示的频率支撑强度一致,充分说明了FSM对辨识不同原因引起的GFL频率支撑强度变化的适用性。
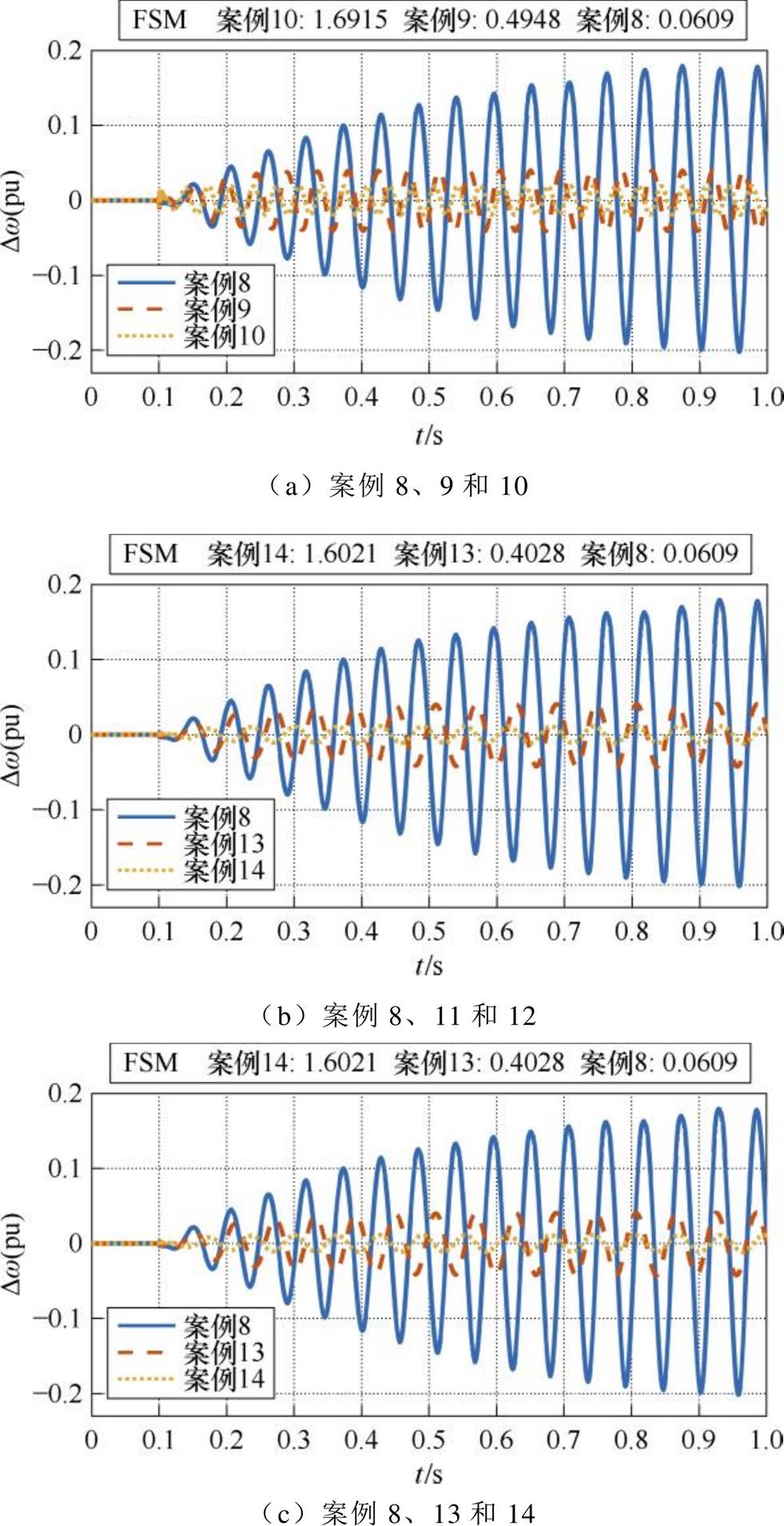
图8 案例8~14的GFL响应波形
Fig.8 Response waveforms of GFL for case 8 to 14
改造IEEE 14母线系统如图9所示。其中,母线1设置为无穷大母线,母线2、3和5连接GFM,而母线6、8和12连接GFL。除了GFM3的PFL下垂增益被设置为0.03(pu),其余所有GFM和GFL的结构和参数如附图1、附图2所示和见附表2。
不同方法的PR计算结果如图10所示。对于模式1,GFM的SD参与程度很高,而ED参与程度很低。这表明模式1几乎只受GFM中PFL的影响,并且是由GFM5所主导。14母线系统模式1的IPF和APF见表5。表5中,IPF和APF互为相反数,则验证了两种参与因子的统一性。MAI只能对IBR的参与情况进行评估,因此缺乏对IBR内部动态进行细致分析的能力,而EMAI能够深入量化评估IBR不同内部动态的作用效果。图10中,EMAI和MASS方法对于不同模式具有几乎相同高度的条形图,这验证了EMAI在不同电源和混合电源场景下的适用性。对于不同类型的IBR,图10还表明随着振荡模式的频率下降,每个GFM或GFL中主导动态逐渐由ED向SD转变,与一般的认知一致。然而,大规模系统可能具有多个较弱阻尼的振荡模式,仅靠EMAI难以直接地评价不同IBR的频率支撑强度。
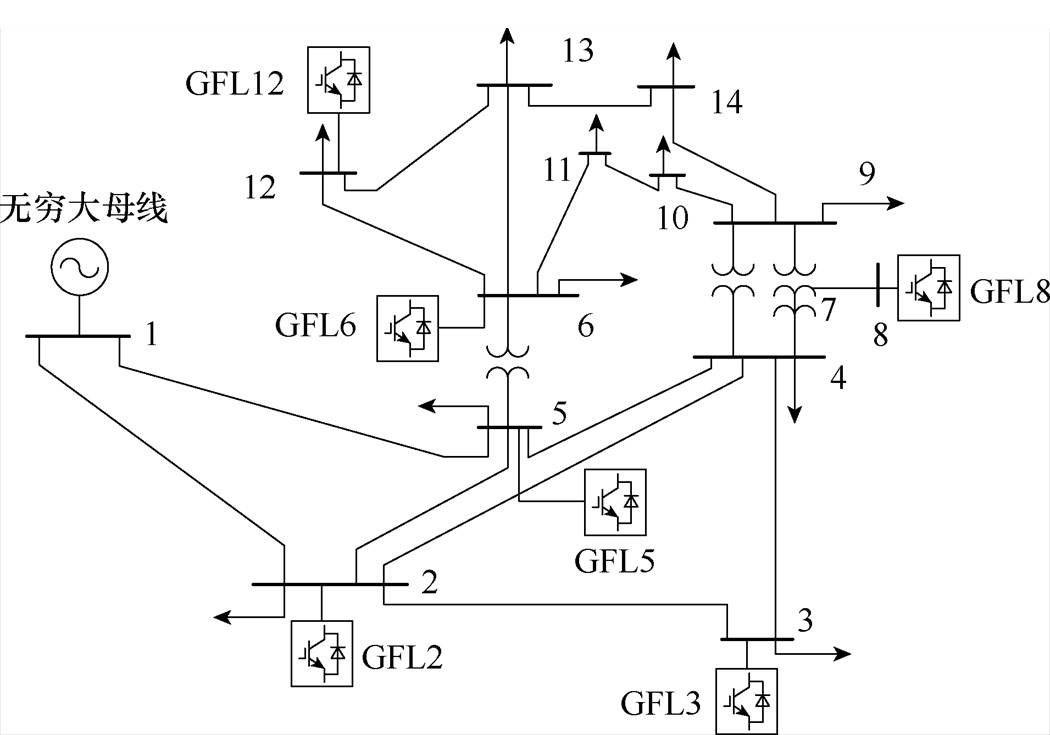
图9 含GFM和GFL的改造IEEE 14母线系统
Fig.9 Modified IEEE 14 bus system with GFM and GFL
表6给出了14母线系统中不同IBR的FSM与取值的特征值,图11给出了不同IBR受到相同幅值扰动的振荡波形。在GFM中,GFM3离无穷大母线的电气距离最远。根据GFM的强电网不稳定性,GFM3预计频率支撑强度最高。然而GFM3的频率支撑强度反而最低,这是因为GFM3中PFL的下垂增益被故意设置为0.03(pu),远大于GFM2和GFM3的0.005(pu)。
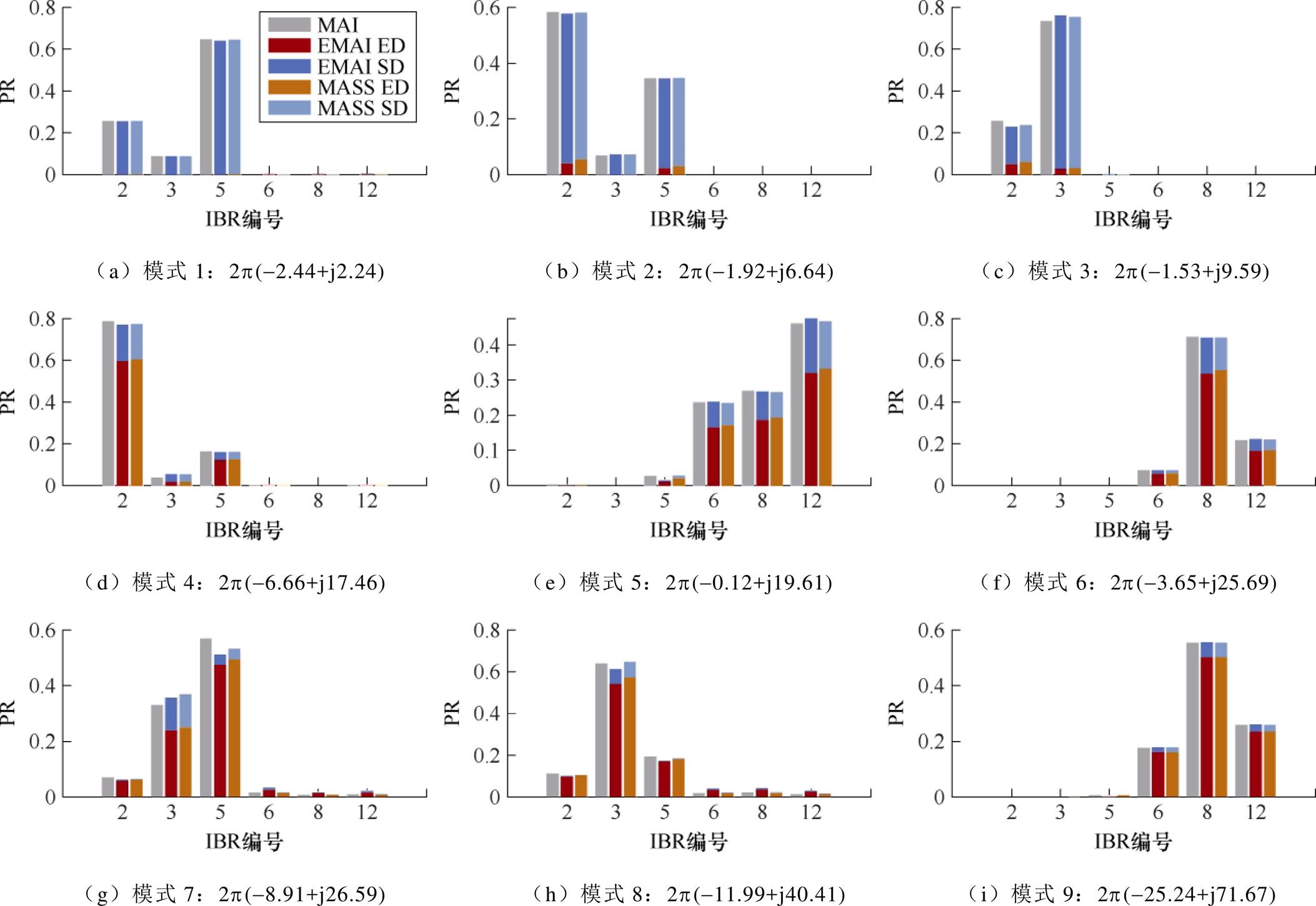
图10 改造14母线系统IBR参与评估
Fig.10 Modified 14 bus system IBR participation assessment
表5 14母线系统模式1的IPF和APF
Tab.5 IPF and APF of mode 1 in 14-bus system
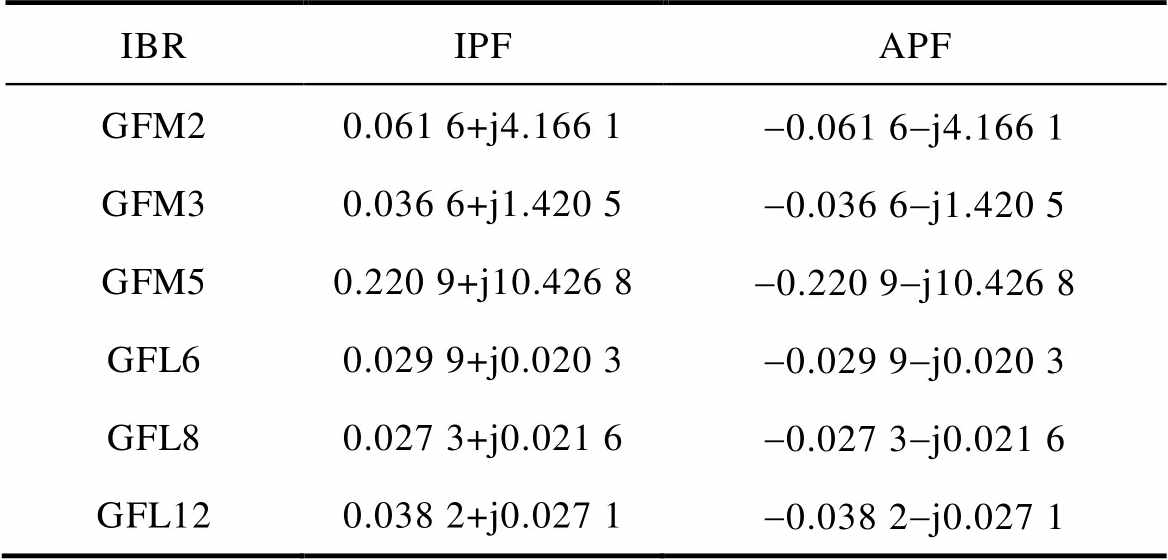
IBRIPFAPF GFM20.061 6+j4.166 1-0.061 6-j4.166 1 GFM30.036 6+j1.420 5-0.036 6-j1.420 5 GFM50.220 9+j10.426 8-0.220 9-j10.426 8 GFL60.029 9+j0.020 3-0.029 9-j0.020 3 GFL80.027 3+j0.021 6-0.027 3-j0.021 6 GFL120.038 2+j0.027 1-0.038 2-j0.027 1
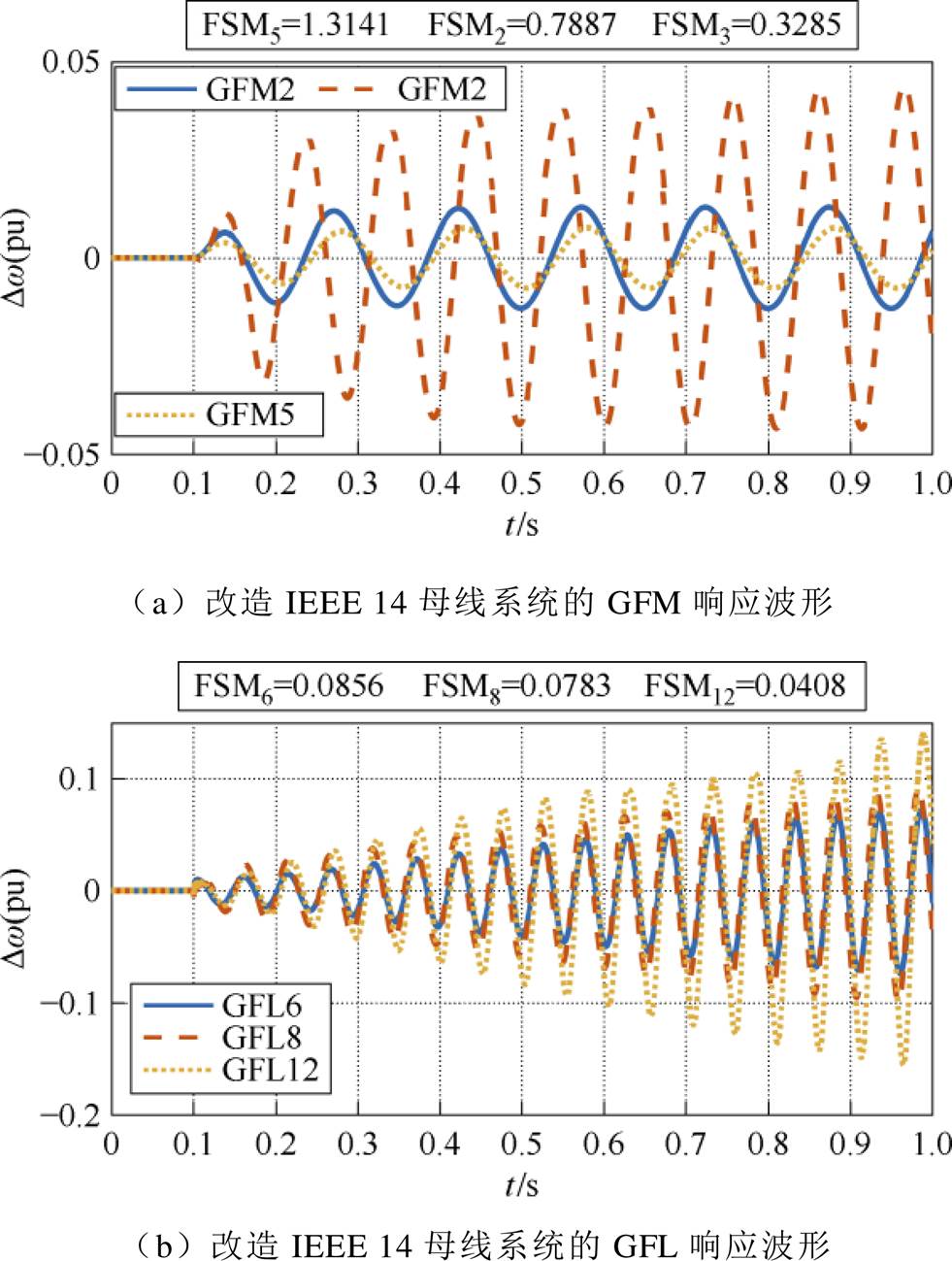
图11 IBR响应波形
Fig.11 IBR response waveforms
表6的FSM所表示的频率支撑强度和图11中不同IBR的不同频率响应波形结果一致,有效地验证了FSM在较大规模电力系统中的适用性。
在一个较大规模的系统中,优化系统整体的频率稳定性需要从定位频率稳定性薄弱点和制定改善频率稳定措施两方面入手。首先所提FSM提示系统运行人员,系统频率支撑强度哪里弱和有多弱;其次PPF可以具体指导IBR控制参数向什么方向优化;最后根据调整前后的FSM验证优化措施的有效性。
表6 14母线系统的FSM与取值的特征值点
Tab.6 FSM and eigenvalue points of 14-bus system
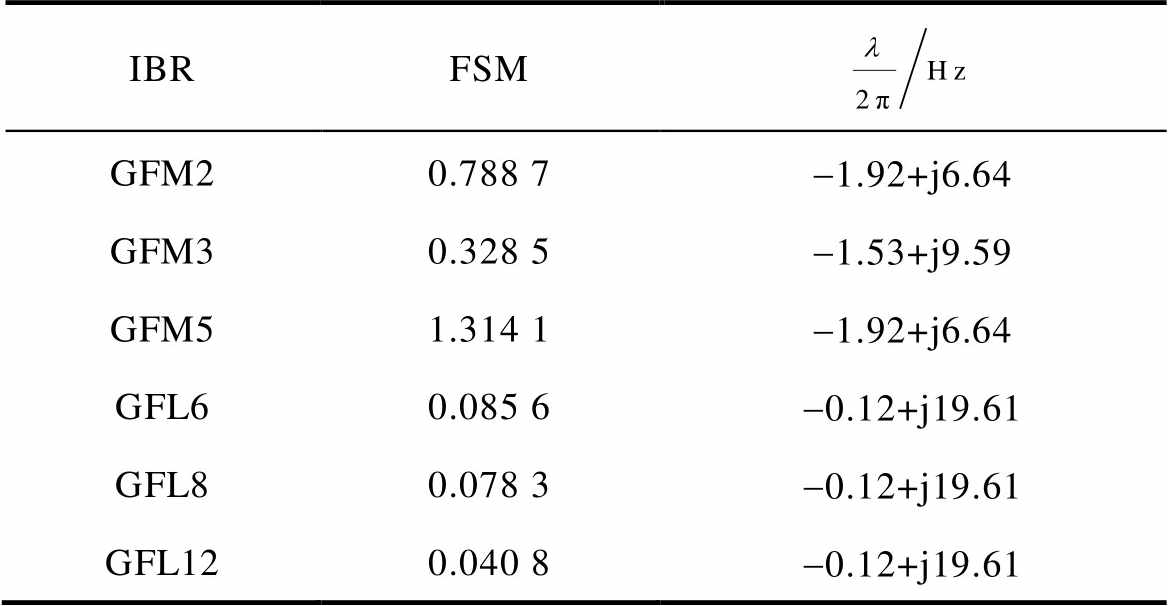
IBRFSM GFM20.788 7-1.92+j6.64 GFM30.328 5-1.53+j9.59 GFM51.314 1-1.92+j6.64 GFL60.085 6-0.12+j19.61 GFL80.078 3-0.12+j19.61 GFL120.040 8-0.12+j19.61
具体地,GFL12的FSM值最低,这表明GFM12是系统频率稳定的薄弱点。GFL6、GFL8和GFL12的FSM取值点均是2p(-0.12+j19.61),并且由图10e可知,该模式主要受到GFL的影响。考虑对GFL的控制参数进行调整以改善频率支撑强度,表7给出了GFL中CCL比例增益和积分增益以及PLL比例增益和积分增益的PPF。其中GFL12的PPF数值大于GFL6和GFL8,这与图10e所表明的模式5由GFL12主导相一致。
表7 14母线系统模式5的PPF
Tab.7 PPF of mode 5 in 14-bus system
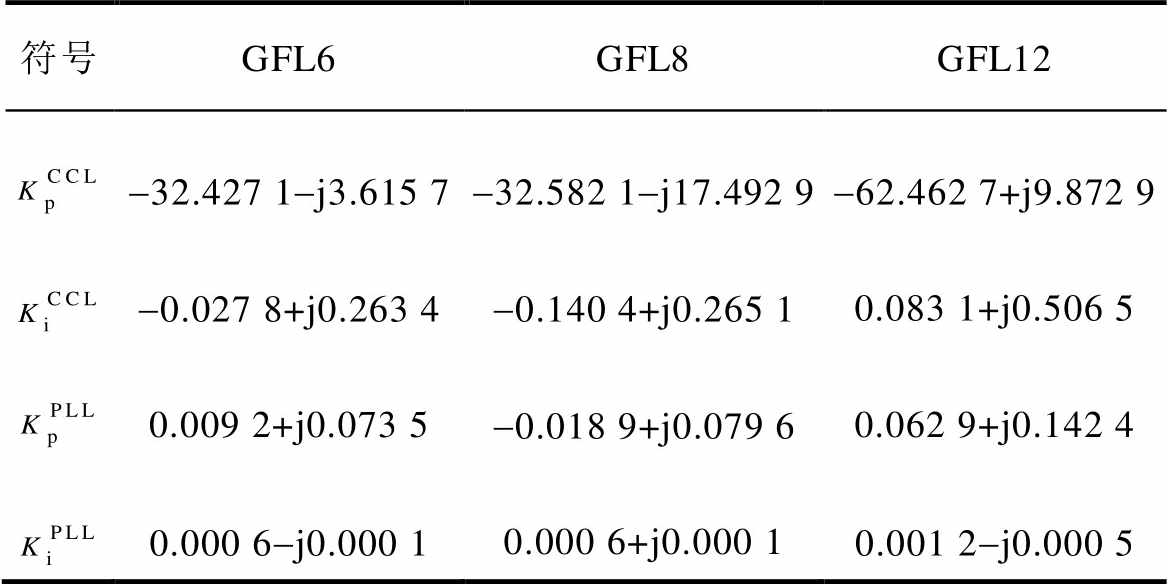
符号GFL6GFL8GFL12 -32.427 1-j3.615 7-32.582 1-j17.492 9-62.462 7+j9.872 9 -0.027 8+j0.263 4-0.140 4+j0.265 10.083 1+j0.506 5 0.009 2+j0.073 5-0.018 9+j0.079 60.062 9+j0.142 4 0.000 6-j0.000 10.000 6+j0.000 10.001 2-j0.000 5
由PPF的实部可知,对于GFL12,在CCL提高PI控制器的比例增益以及在PLL中减小PI控制器的比例增益是不同控制环中改善系统稳定性的较好方式。因此,考虑措施1和2提高该模式阻尼。措施1:将GFL12的CCL比例增益从0.168增加到0.25(增大约50%);措施2:将GFL12的PLL比例增益从94.2478减小到46(减小约50%)。
图12a表明两种措施均使得模式5的阻尼得到了增强。表8给出了不同阻尼改善措施的FSM与取值的特征值。图12b表明两种阻尼改善措施均使得GFM12的频率支撑强度得到了很大的提升。此外,措施2振荡幅值最小表明措施2是更优的选择,与FSM所指示频率支撑强度一致,这充分展现了FSM在较大规模电力系统中指导IBR频率支撑强度提升的有效性。
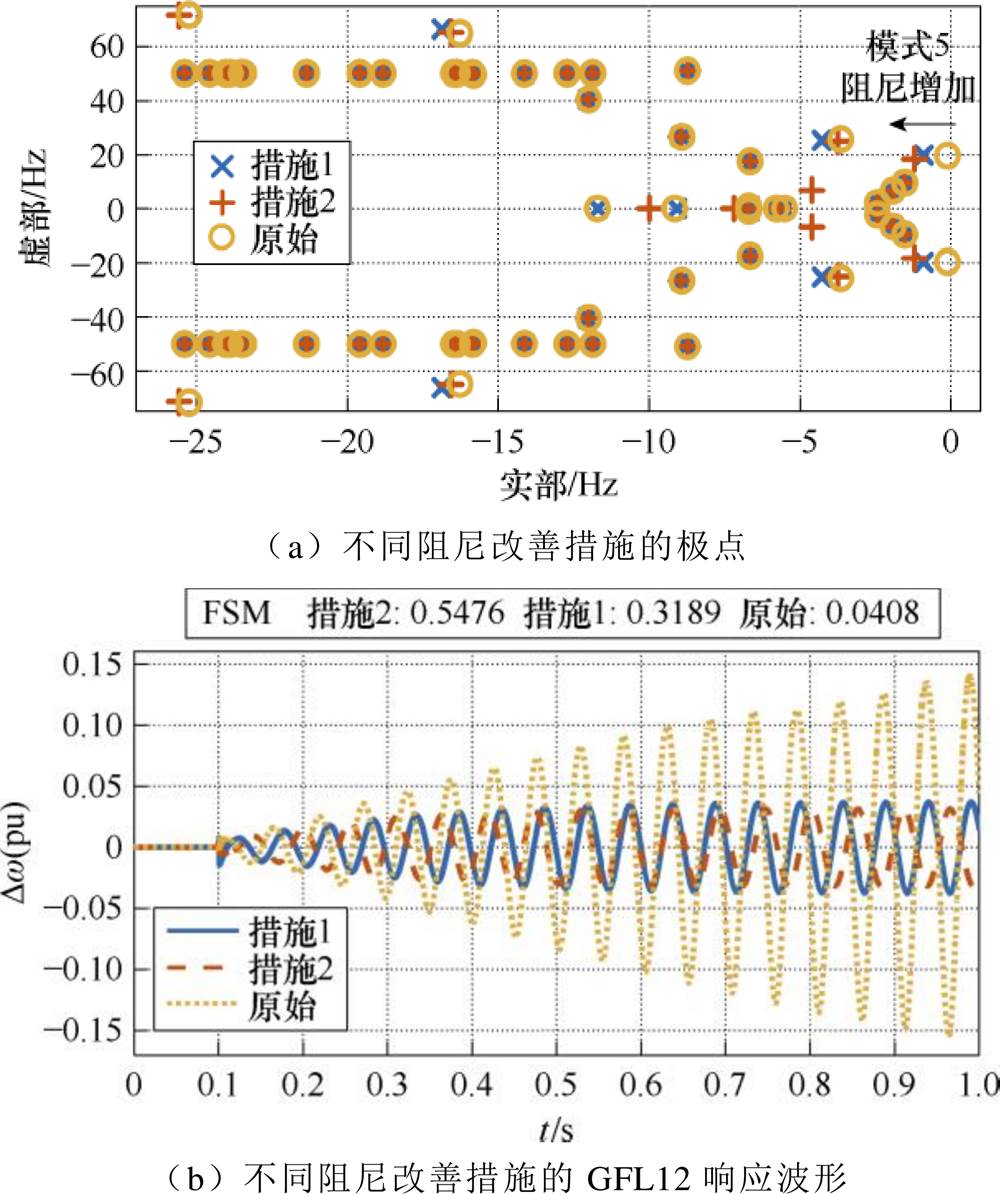
图12 不同阻尼改善措施的极点和响应波形
Fig.12 Pole plots and response waveforms of different damping improvement measures
表8 不同阻尼改善措施的FSM
Tab.8 FSM of different damping improvement measures
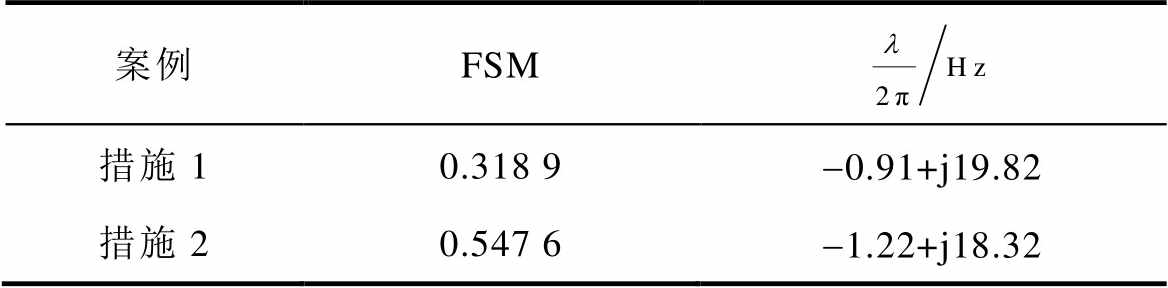
案例FSM 措施10.318 9-0.91+j19.82 措施20.547 6-1.22+j18.32
本文提出了一种基于EMAI的IBR频率支撑强度的量化评估方法。统一的EMAI使得分析不同类型IBR的内部SD不必限定于选择特定的频率响应端口,可直接从广泛使用的阻抗/导纳模型中捕获。详细的仿真结果充分地说明了FSM可以反映IBR内部不同时间尺度控制器、GFM遇强电网和GFL遇弱电网等不同原因导致的频率稳定问题。该方法适用于高比例IBR的新型电力系统,即使无法获得IBR的详细控制信息,也可以使用数据驱动技术进行计算,并且由于FSM计算简便,在实际工程中具有较好的应用价值。未来的工作重点是考虑频率支撑强度约束下的IBR优化配置和不同附加控制对IBR频率支撑强度的影响。
附 录
附表1 本文所用缩写词
App.Tab.1 The list of abbreviations used in this article
缩写英文全称中文全称 IBRInverter-Based Resource逆变器资源 GFMGrid-Forming Inverter构网型逆变器 GFLGrid-Following Inverter跟网型逆变器 SDSynchronous Dynamics同步动态 EDElectromagnetic Dynamics电磁动态 PFLPower Frequency Synchronization Loop功率频率同步环 VCLVoltage Control Loop电压控制环 PLLPhase-Locked Loop锁相环 CCLCurrent Control Loop电流控制环 PFParticipation Factor参与因子 IPFImpedance Participation Factor阻抗参与因子 APFAdmittance Participation Factor导纳参与因子 PPFParameter Participation Factor参数参与因子 PRParticipation Ratio参与比 FSMFrequency Support Margin频率支撑裕度 MASSModal Analysis based on the State-Space状态空间模态分析 MAIModal Analysis based on Impedance 阻抗模态分析 EMAIExtended Modal Analysis based on Impedance扩展阻抗模态分析
GFMm的阻抗分解如下
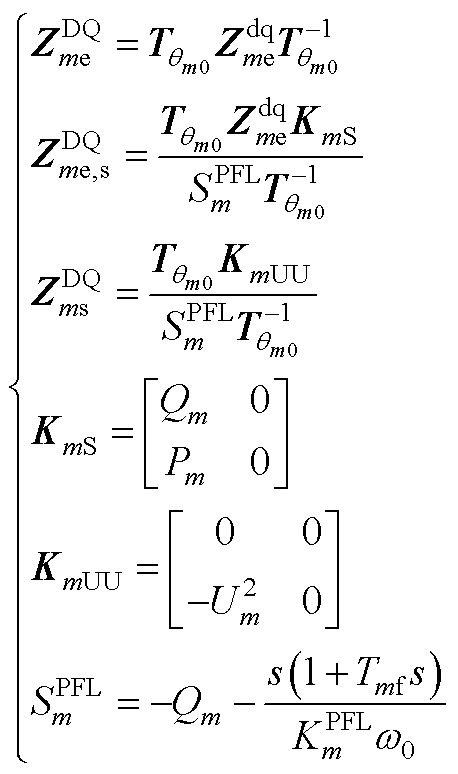 (A1)
(A1)
式中, 为GFM的dq阻抗;KmS和KmUU分别为与稳态功率和电压相关的系数矩阵;
为GFM的dq阻抗;KmS和KmUU分别为与稳态功率和电压相关的系数矩阵; 为与PFL参数相关的等效功率;
为与PFL参数相关的等效功率; 和Tmf=1/(2pfmf)分别为PFL的下垂增益和滤波时间常数;Um、Pm和Qm分别为在公共耦合点测得的电压、有功功率和无功功率;
和Tmf=1/(2pfmf)分别为PFL的下垂增益和滤波时间常数;Um、Pm和Qm分别为在公共耦合点测得的电压、有功功率和无功功率; 、
、 、
、 和
和 分别为d、q轴电压、电流稳态值;
分别为d、q轴电压、电流稳态值; 为由初始潮流分析确定的坐标变换矩阵。
为由初始潮流分析确定的坐标变换矩阵。
GFLm的导纳分解如下
 (A2)
(A2)
式中, 为GFL的dq导纳;KmU和KmI分别为与稳态电压和电流相关的系数矩阵;
为GFL的dq导纳;KmU和KmI分别为与稳态电压和电流相关的系数矩阵; 为与PLL参数相关的等效电压;
为与PLL参数相关的等效电压; 和
和 分别为PLL的比例增益和下垂增益。
分别为PLL的比例增益和下垂增益。
附表2 逆变器基础参数
App.Tab.2 Basic inverter parameter
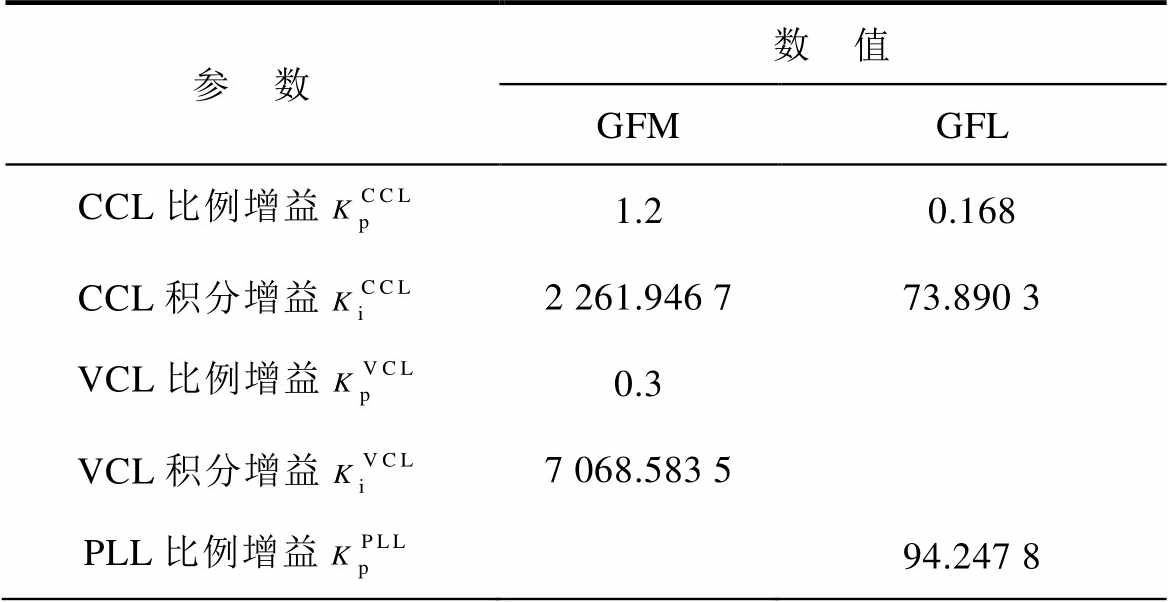
参 数数 值 GFMGFL CCL比例增益1.20.168 CCL积分增益2 261.946 773.890 3 VCL比例增益0.3 VCL积分增益7 068.583 5 PLL比例增益94.247 8
(续)
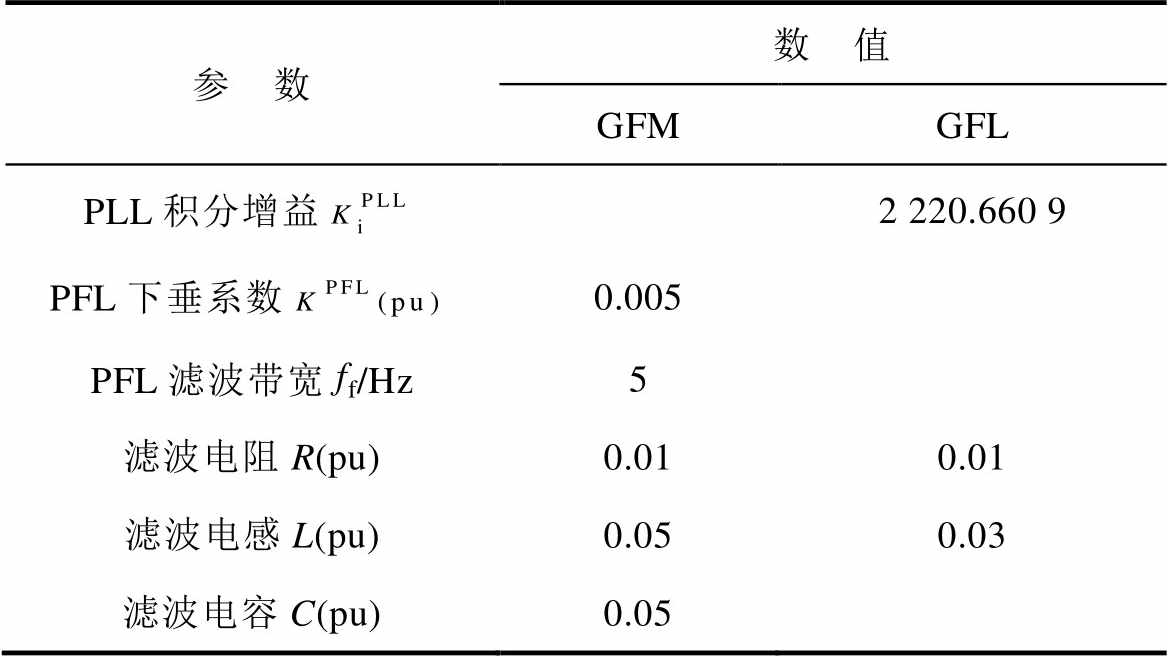
参 数数 值 GFMGFL PLL积分增益2 220.660 9 PFL下垂系数0.005 PFL滤波带宽ff/Hz5 滤波电阻R(pu)0.010.01 滤波电感L(pu)0.050.03 滤波电容C(pu)0.05
附图1 构网型逆变器结构
App.Fig.1 GFM structure
附图2 跟网型逆变器结构
App.Fig.2 GFL structure
参考文献
[1] Hong Qiteng, Khan M A U, Henderson C, et al. Addressing frequency control challenges in future low-inertia power systems: a great Britain perspe- ctive[J]. Engineering, 2021, 7(8): 1057-1063.
[2] Sun Shitao, Lei Yu, Hao Guowen, et al. Transient damping of virtual synchronous generator for enhancing synchronization stability during voltage dips[J]. CES Transactions on Electrical Machines and Systems, 2024, 8(2): 143-151.
[3] Pang Bo, Si Qi, Jiang Pan, et al. Review of the analysis and suppression for high-frequency oscillations of the grid-connected wind power generation system[J]. CES Transactions on Electrical Machines and Systems, 2024, 8(2): 127-142.
[4] 黄萌, 舒思睿, 李锡林, 等. 面向同步稳定性的电力电子并网变流器分析与控制研究综述[J]. 电工技术学报, 2024, 39(19): 5978-5994.
Huang Meng, Shu Sirui, Li Xilin, et al. A review of synchronization-stability-oriented analysis and control of power electronic grid-connected converters[J]. Transactions of China Electrotechnical Society, 2024, 39(19): 5978-5994.
[5] Hatziargyriou N, Milanovic J, Rahmann C, et al. Definition and classification of power system stability-revisited & extended[J]. IEEE Transactions on Power Systems, 2021, 36(4): 3271-3281.
[6] Gu Yunjie, Green T C. Power system stability with a high penetration of inverter-based resources[J]. Pro- ceedings of the IEEE, 2023, 111(7): 832-853.
[7] 闵勇, 陈磊, 刘瑞阔, 等. 电力系统频率动态中惯量与惯量响应特性辨析[J]. 中国电机工程学报, 2023, 43(3): 855-868.
Min Yong, Chen Lei, Liu Ruikuo, et al. Analysis on characteristics of inertia and inertial response in power system frequency dynamics[J]. Proceedings of the CSEE, 2023, 43(3): 855-868.
[8] 胡光, 庄可好, 高晖胜, 等. 低惯量交流系统并网变流器次/超同步振荡分析[J]. 电工技术学报, 2024, 39(8): 2250-2264.
Hu Guang, Zhuang Kehao, Gao Huisheng, et al. Sub/super synchronous oscillation analysis of grid connected converter in low inertia AC system[J]. Transactions of China Electrotechnical Society, 2024, 39(8): 2250-2264.
[9] 张怡静, 李智, 时艳强, 等. 基于储能惯量支撑的受端电网频率优化控制方法[J]. 电工技术学报, 2024, 39(11): 3556-3568.
Zhang Yijing, Li Zhi, Shi Yanqiang, et al. Optimal frequency control method of receiving power grid based on energy storage inertia support[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(11): 3556-3568.
[10] Li Yitong, Gu Yunjie, Green T C. Revisiting grid- forming and grid-following inverters: a duality theory[J]. IEEE Transactions on Power Systems, 2022, 37(6): 4541-4554.
[11] Hu Pengfei, Li Yujing, Yu Yanxue, et al. Inertia estimation of renewable-energy-dominated power system[J]. Renewable and Sustainable Energy Reviews, 2023, 183: 113481.
[12] 孙华东, 赵兵, 徐式蕴, 等. 高比例电力电子电力系统强度的定义、分类及分析方法[J]. 中国电机工程学报, 2024, 44(18): 7039-7049.
Sun Huadong, Zhao Bing, Xu Shiyun, et al. Definition, classification, and analysis method of the strength of power system integrated with high penetration of power electronics[J]. Proceedings of the CSEE, 2024, 44(18): 7039-7049.
[13] 丁磊, 郭一忱, 鲍威宇, 等. 能量视角下的电力系统惯量[J]. 电力系统自动化, 2024, 48(8): 3-13.
Ding Lei, Guo Yichen, Bao Weiyu, et al. Inertia of power systems from energy perspective[J]. Auto- mation of Electric Power Systems, 2024, 48(8): 3-13.
[14] 颜湘武, 贾焦心, 王德胜, 等. 基于P/w“导纳”的并联虚拟同步机功频响应建模与分析[J]. 电工技术学报, 2020, 35(15): 3191-3202.
Yan Xiangwu, Jia Jiaoxin, Wang Desheng, et al. Modeling and analysis of active power-frequency response of parallel VSGs using a P/w “admittance”[J]. Transactions of China Electrotechnical Society, 2020, 35(15): 3191-3202.
[15] 胡光, 高晖胜, 辛焕海, 等. 考虑惯量模态特征的电力系统频率性能量化方法[J]. 中国电机工程学报, 2023, 43(22): 8559-8569.
Hu Guang, Gao Huisheng, Xin Huanhai, et al. A Quantification method for frequency performance of power system considering modal feature of inertia[J]. Proceedings of the CSEE, 2023, 43(22): 8559-8569.
[16] 马宁嘉, 谢小荣, 李浩志, 等. 计及频率动态分布性的新能源机组惯量需求分析[J]. 中国电机工程学报, 2024, 44(9): 3500-3508.
Ma Ningjia, Xie Xiaorong, Li Haozhi, et al. Inertial requirements for renewable energy units considering the space-time distribution characteristics of frequ- ency[J]. Proceedings of the CSEE, 2024, 44(9): 3500- 3508.
[17] Yang Deyou, Wang Bo, Cai Guowei, et al. Data- driven estimation of inertia for multiarea inter- connected power systems using dynamic mode decomposition[J]. IEEE Transactions on Industrial Informatics, 2021, 17(4): 2686-2695.
[18] Linaro D, Bizzarri F, del Giudice D, et al. Continuous stimation of power system inertia using convolutional neural networks[J]. Nature Communications, 2023, 14: 4440.
[19] 刘其泳, 于之虹, 张璐路, 等. 基于惯量比的电网频率支撑能力在线评估方法[J]. 电网技术, 2023, 47(2): 493-502.
Liu Qiyong, Yu Zhihong, Zhang Lulu, et al. Online frequency support capacity assessment of power grid based on inertia ratio[J]. Power System Technology, 2023, 47(2): 493-502.
[20] Abouyehia M, Egea-Àlvarez A, Aphale S S, et al. Novel frequency-domain inertia mapping and esti- mation in power systems using wavelet analysis[J]. IEEE Transactions on Power Systems, 2025, 40(3): 2557-2567.
[21] 马燕峰, 李金媛, 王子建, 等. 基于量测数据的新能源电力系统区域等效惯量评估方法[J]. 电工技术学报, 2024, 39(17): 5406-5421.
Ma Yanfeng, Li Jinyuan, Wang Zijian, et al. Assessment method of regional equivalent inertia of new energy power system based on measured data[J]. Transactions of China Electrotechnical Society, 2024, 39(17): 5406-5421.
[22] 胡光, 高晖胜, 辛焕海, 等. 考虑电压动态的电力系统频率强度量化方法[J]. 电力系统自动化, 2024, 48(8): 67-78.
Hu Guang, Gao Huisheng, Xin Huanhai, et al. Quantification method for power system frequency strength considering voltage dynamics[J]. Automation of Electric Power Systems, 2024, 48(8): 67-78.
[23] Hu Guang, Xiao Yi, Xin Huanhai, et al. An extended impedance model for power electronics converters retaining explicit synchronization dynamics[J]. IEEE Transactions on Power Electronics, 2025, 40(1): 2355-2370.
[24] Zhong Weilin, Tzounas G, Milano F. Improving the power system dynamic response through a combined voltage-frequency control of distributed energy resources[J]. IEEE Transactions on Power Systems, 2022, 37(6): 4375-4384.
[25] Ai Cheng, Li Yitong, Zhao Ziwen, et al. An extension of grid-forming: a frequency-following voltage- forming inverter[J]. IEEE Transactions on Power Electronics, 2024, 39(10): 12118-12123.
[26] Fang Jingyang, Li Hongchang, Tang Yi, et al. On the inertia of future more-electronics power systems[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2019, 7(4): 2130-2146.
[27] Kundur P. Power System Stability and Control[M]. New York: McGraw-Hill, Inc, 1994.
[28] Gu Yunjie, Li Yitong, Zhu Yue, et al. Impedance- based whole-system modeling for a composite grid via embedding of frame dynamics[J]. IEEE Transa- ctions on Power Systems, 2021, 36(1): 336-345.
[29] Zhu Yue, Gu Yunjie, Li Yitong, et al. Participation analysis in impedance models: the grey-box approach for power system stability[J]. IEEE Transactions on Power Systems, 2021, 37(1): 343-353.
[30] Zhu Yue, Gu Yunjie, Li Yitong, et al. Impedance- based root-cause analysis: comparative study of impedance models and calculation of eigenvalue sensitivity[J]. IEEE Transactions on Power Systems, 2022, 38(2): 1642-1654.
[31] 郑乐, 郑佳杰. 构网型逆变器内部动态的扩展阻抗模态分析[J]. 电工技术学报, 2025, 40(9): 2712-2723, 2737.
Zheng Le, Zheng Jiajie. Extended impedance modal analysis of internal dynamics in grid-forming inverters[J]. Transactions of China Electrotechnical Society, 2025, 40(9): 2712-2723, 2737.
[32] 徐政. 新型电力系统背景下电网强度的合理定义及其计算方法[J]. 高电压技术, 2022, 48(10): 3805- 3819.
Xu Zheng. Reasonable definition and calculation method of power grid strength under the background of new type power systems[J]. High Voltage Engin- eering, 2022, 48(10): 3805-3819.
[33] 张祥宇, 胡剑峰, 付媛, 等. 风储联合系统的虚拟惯量需求与协同支撑[J]. 电工技术学报, 2024, 39(3): 672-685.
Zhang Xiangyu, Hu Jianfeng, Fu Yuan, et al. Virtual inertia demand and collaborative support of wind power and energy storage system[J]. Transactions of China Electrotechnical Society, 2024, 39(3): 672- 685.
[34] 阮益闽, 宗启航, 姚伟, 等. 计及典型控制的风电场调频能力量化评估及影响因素分析[J]. 电力系统自动化, 2024, 48(8): 42-52.
Ruan Yimin, Zong Qihang, Yao Wei, et al. Quantitative assessment and analysis of influencing factors on frequency regulation capability of wind farms considering typical control[J]. Automation of Electric Power Systems, 2024, 48(8): 42-52.
[35] 赵冬梅, 宋晨铭, 冯向阳, 等. 100%新能源场景下考虑频率稳定约束的源网荷储一体化系统储能优化配置[J]. 电工技术学报, 2025, 40(7): 2146-2161.
Zhao Dongmei, Song Chenming, Feng Xiangyang, et al. The optimal configuration of energy storage in the source-grid-load-storage integrated system con- sidering frequency stability constraints in 100% new energy scenarios[J]. Transactions of China Electro- technical Society, 2025, 40(7): 2146-2161.
[36] Fan Lingling, Miao Zhixin. Time-domain measurement- based DQ-frame admittance model identification for inverter-based resources[J]. IEEE Transactions on Power Systems, 2021, 36(3): 2211-2221.
[37] 吴滨源, 李建文, 李永刚, 等. 并网逆变器dq阻抗灰箱辨识方法与应用[J]. 中国电机工程学报, 2022, 42(4): 1534-1546.
Wu Binyuan, Li Jianwen, Li Yonggang, et al. Gray- box identification method of grid-connected inverters dq impedance and its applications[J]. Proceedings of the CSEE, 2022, 42(4): 1534-1546.
[38] Li Yufei, Liao Yicheng, Zhao Liang, et al. Machine learning at the grid edge: data-driven impedance models for model-free inverters[J]. IEEE Transactions on Power Electronics, 2024, 39(8): 10465-10481.
Abstract With the large-scale integration of high-proportion inverter-based resources (IBRs), the synchronous dynamic (SD) characteristics of modern power systems have undergone significant changes. The reduction in system equivalent inertia results in more severe frequency fluctuations, posing new challenges to frequency security and stability. Based on flexible control algorithms, these IBRs are mainly categorized into grid-forming inverters (GFMs) and grid-following inverters (GFLs). The distinct external characteristics of GFMs and GFLs further complicate the analysis of frequency stability in power systems.
To quantitatively analyze the frequency support strength of IBRs, it is essential to consider the impact of various influencing factors on system stability. Modal Analysis based on the state-space model (MASS) quantifies the contribution of each state variable to a specific mode using the participation factor (PF). However, issues such as the black-box nature of the model and the curse of dimensionality limit its applicability in large-scale systems. Currently, impedance-based analysis methods have been widely discussed. Based on the whole-system dynamic admittance matrix and dynamic impedance matrix, the modal analysis based on impedance model (MAI) method introduces the impedance participation factor (IPF) and the admittance participation factor (APF). IPF and APF treat IBRs as a whole, considering their overall dynamic impact on system stability. As a result, MAI cannot provide detailed insights into the internal dynamics of IBRs.
To address the control characteristics of GFMs, the impedance-based extended modal analysis (EMAI) method classifies the GFM dynamics into SD, dominated by the power frequency synchronization loop (PFL), and electromagnetic dynamics (ED), governed by the voltage control loop (VCL). For GFLs, the admittance- based EMAI method categorizes their dynamics into SD, dominated by the phase-locked loop (PLL), and ED, governed by the current control loop (CCL). However, the relationship between the impedance-based EMAI and the admittance-based EMAI remains unclear. Moreover, in large-scale systems, multiple oscillatory modes with weak damping may exist, and the SD of different IBRs may contribute to these modes. As a result, EMAI alone may not be sufficient for directly and equitably assessing the frequency support capability of different IBRs.
This paper proposes an accurate evaluation method for IBR frequency support strength based on EMAI. First, the unification of the IPF and APF is demonstrated, thereby extending the applicability of the EMAI method to analyze the internal ED and SD of IBRs in hybrid power systems that contain GFMs and GFLs. Subsequently, based on EMAI, the maximum perturbation level of the dominant SD mode in IBRs is calculated to define the frequency support margin (FSM), which determines the frequency support strength of IBRs. Then, FSM is used to analyze the impact of different improvement measures on the frequency support strength of IBRs. Finally, simulations of a single GFM/GFL infinite system and a modified IEEE 14-bus system are conducted. Depending on data availability, the proposed method can adopt either a data-driven or model-driven approach, making it highly applicable in engineering practice.
The unified EMAI enables the analysis of internal SD in different types of IBRs, without being restricted to specific frequency response ports, allowing for direct extraction from widely used impedance/admittance models. For GFMs, lower grid impedance, reduced proportional and integral gains of the VCL (narrower VCL bandwidth), and higher PFL droop gains lead to a decrease in frequency support strength. For GFLs, higher grid impedance, reduced proportional and integral gains of the CCL (resulting in a narrower CCL bandwidth), and increased proportional and integral gains of the PFL (resulting in a wider CCL bandwidth) contribute to a reduction in frequency support strength.
keywords:Frequency support strength, synchronous dynamic, participation factor, anti-disturbance capa- bility, impedance model
DOI: 10.19595/j.cnki.1000-6753.tces.250740
中图分类号:TM614
国家自然科学基金(52307095)和中央高校基本科研业务费学科交叉创新专项(2025JC004)资助项目。
收稿日期 2025-04-30
改稿日期 2025-05-29
郑佳杰 男,2001年生,硕士研究生,研究方向为电力系统稳定与控制。E-mail: zjj978626117@163.com
郑 乐 男,1989年生,副教授,研究方向为人工智能及其在电力系统稳定与控制的应用。E-mail: zhengl20@ncepu.edu.cn(通信作者)
(编辑 陈 诚)