图1 三相两电平PWM混合变换器拓扑结构
Fig.1 Topology of three-phase two-level PWM hybrid converter
摘要 该文提出一种基于有限时间观测器的改进超螺旋滑模控制策略,旨在提升三相混合变换器的动态响应速度与抗干扰能力。首先,在电压外环设计了改进超螺旋滑模控制器,通过引入自适应增益机制,在保持响应速度的同时降低系统抖振。其次,设计有限时间扩展状态观测器,对系统集总扰动进行精确估计与实时补偿,实现预设时间内观测误差的收敛,有效提升控制系统的动态性能。在电流内环设计中,针对混合变换器中无源模块引发的周期性电流突变问题,使用PI-重复控制,实现了总输入电流的正弦化跟踪及低频谐波消除。最后,通过设计PI控制、传统超螺旋滑模控制以及该文所提控制方法的对比实验,验证了所提控制策略的有效性。
关键词:交直流微电网 混合变换器 滑模控制 有限时间状态观测器 抖振抑制
在当前能源转型与“双碳”目标的驱动下,分布式可再生能源技术迅速发展,微电网系统成为实现区域能源自给与高效利用的重要平台[1-2]。传统的混合交直流微电网通常采用有源双向互联变换器在交流母线与直流母线之间进行功率传递[3-4],但其在成本、转换效率以及可靠性等方面存在一定局限性。文献[5]提出了一种混合变流器,将二极管整流电路与PWM整流电路结合,使得前者输出大部分功率,后者输出小部分功率,并进行电流滤波和功率因数补偿。由于大部分功率由二极管整流电路承担,从而降低了系统整体的热损耗以及开关损耗,减少了对高性能开关器件的依赖,因此混合整流器具有高效、大功率、高功率密度等优点,在长期使用中的维护成本更低,适用于微电网、航空航天、新能源发电等领域[6]。但是受限于其自身结构特性,有源模块无法快速跟踪突变的期望电流,交流侧电流会发生周期性畸变。文献[7]在无源模块前端增设补偿电感,以削弱两并联模块在自然换流点合成时产生的电流尖峰。此外为了提高系统的抗扰能力,同时为保证电流波形质量以支持高功率因数运行,设计更先进的鲁棒控制系统至关重要。目前国内外针对混合变换器的研究仍较为有限,相比之下,传统三相PWM变换器的研究较为成熟,因此可以借鉴相关技术,对混合变换器的控制系统进行设计。
在传统变换器的研究中,各类非线性控制方法得到了广泛研究,如预测控制[8]、自抗扰控制[9-10]以及滑模控制(Sliding Mode Control, SMC)[11]等。其中,滑模控制是一种典型的变结构控制策略,其基本原理是通过构造合适的滑模面,使系统状态在有限时间内趋近并沿滑模面运动,最终收敛至稳定的平衡点或预期目标[12]。滑模控制对系统模型精度要求不高,可有效降低系统模型的阶数,具有强鲁棒性和抗干扰能力,但传统滑模控制存在高频抖振现象,会造成内环参考信号抖动,为此,学者们提出了诸多改进方案。文献[13]提出了一种自适应超螺旋全局滑模控制,将超螺旋算法的切换项嵌入积分项,动态调节切换增益,从而降低系统对不确定性边界的依赖。文献[14]提出了一种无符号函数的新型指数趋近律滑模控制方法,通过引入指数项动态调节趋近速率,显著缩短趋近时间并消除抖振。
当考虑到系统内部不确定性和外部扰动时,滑模增益需要覆盖扰动上界,通过高增益切换项对其进行抑制,但高增益同时也会导致稳态抖动与动态性能下降。文献[15]将扩张状态观测器加入到滑模控制器中,通过将估计的扰动值直接补偿到控制律中,大幅降低滑模控制的增益需求,同时由于扰动被快速补偿,控制器无需等待误差积累即可主动消除扰动影响,进而提升了系统动态响应速度。在此类研究中,扩张状态观测器(Extended State Observer, ESO)因其结构简单、易于实现而得到广泛应用,然而传统的ESO算法虽然具有较好的估计性能,但估计误差仅能渐近收敛到零,在时变扰动下可能会延迟收敛,且当初始误差较大时,收敛时间会显著增加。在某些场景下,此类观测器的使用会受到限制[16-17]。为了解决这一问题,相关学者们提出了有限时间收敛理论[18],并将其成功应用于控制器设计及相关实践中[19-21],基于此理论衍生的有限时间扩展状态观测器(Finite-Time Extended State Observer, FTESO)能够在预设时间内完成状态估计和扰动补偿,这一特性使得其收敛速度、抗干扰能力和复杂场景适应性方面显著优于传统ESO,尤其适用于需要快速响应和高精度控制的系统。
本文针对三相混合变换器提出了一种基于有限时间观测器的改进超螺旋滑模控制(Improved Super- Twisting Sliding Mode Control based on Finite Time Extended State Observer, FTESO-ISTSMC)方案。在电压外环设计了一种改进超螺旋滑模控制,旨在保持动态性能的同时减小系统的抖振;设计有限时间观测器对系统集总扰动进行观测补偿,以提高系统响应速度与抗干扰能力,给出了该控制器的设计过程以及稳定性证明;电流内环结合PI的快速动态响应与重复控制的周期扰动抑制能力,实现输入电流正弦化并消除低频谐波。最后基于本文所设计控制系统设置对比实验,证明了该方法的有效性。
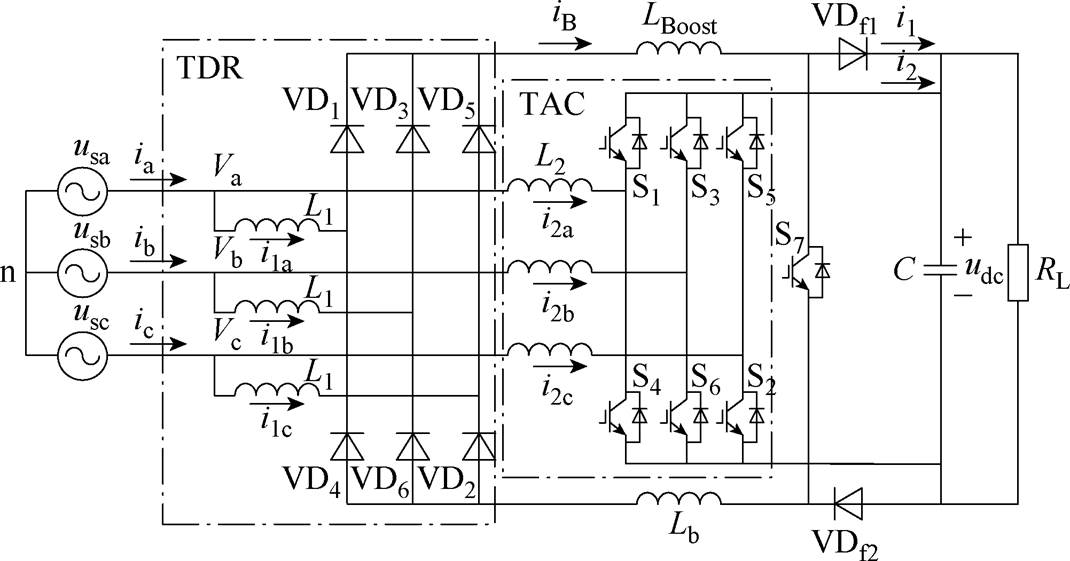
三相两电平PWM混合变换器拓扑结构如图1所示。三相二极管整流器(Three-phase Diode Rectifier, TDR)与Boost电路级联组成单管级联无源整流模块(Single-tube Cascaded Three-phase Diode Rectifier, SCTDR);SCTDR与三相有源变流模块(Three-phase Active Converter, TAC)在交流测并联,同时在直流侧通过二极管相连接组成混合变换器。图1中,usa、usb、usc为网侧输入电压;ia、ib、ic为总输入电流;i1a、i1b、i1c为无源输入电流;i2a、i2b、i2c为有源输入电流;L1为TDR交流侧滤波电感;L2为TAC交流侧滤波电感;LBoost为升压电感;iB为Boost电路输入电流;C为直流滤波电容;i1为SCTDR输出电流;i2为TAC输出电流;udc为直流侧电压。
图1 三相两电平PWM混合变换器拓扑结构
Fig.1 Topology of three-phase two-level PWM hybrid converter
在混合交直流微电网中,混合变换器作为交直流母线的能量交互枢纽,其运行特性可通过两种典型工况进行解析。当udc显著且持续地低于其参考值时,直流侧功率供给不足,混合变换器将切换至整流模式运行,电能通过SCTDR和TAC协同传输至直流侧,其中SCTDR的输入电流中含有大量谐波,而此时TAC可对其进行电流滤波和功率因数补偿,混合变换器输入电流特性如图2所示,两者的输入电流波形呈现互补特性—SCTDR的畸变电流与TAC的补偿电流叠加后,总输入电流波形经补偿后呈现理想正弦特性,且与网侧电压保持同相,确保系统维持单位功率因数运行状态。当udc显著且持续地高于其参考值时,直流侧出现功率盈余,系统切换至逆变模式,SCTDR退出运行,TAC作为逆变器工作,在此工况下,如图2d所示,网侧电压与电流呈现180°相位差,将能量回馈至交流电网。
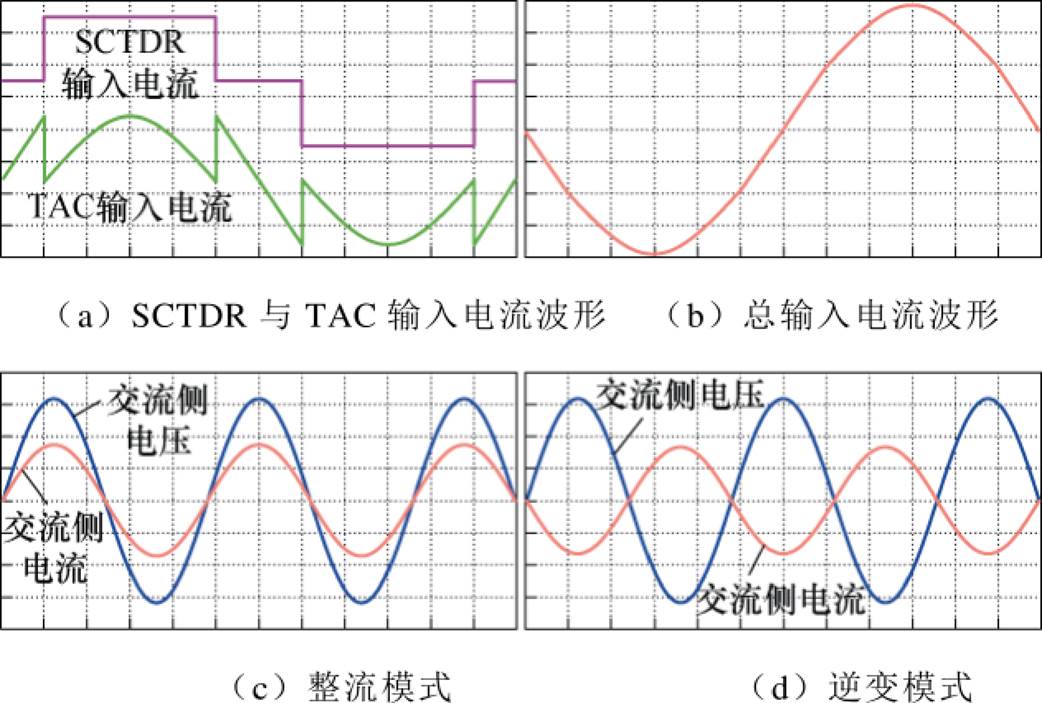
图2 混合变换器输入电流特性
Fig.2 Input current characteristics of hybrid converter
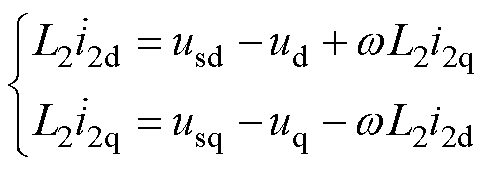
三相PWM整流器为混合变换器的可控部分,忽略交流侧线路等效电阻,其两相旋转坐标系下的数学模型为
 (1)
(1)
式中,i2d、i2q分别为混合变换器输入电流在旋转坐标系下的d、q轴分量;usd、usq分别为网侧输入电压的d、q轴分量;ud=Sdudc、uq=Squdc分别为整流器输出端电压在两相旋转坐标系下的d、q轴分量,Sd、Sq分别为三相PWM整流器开关在旋转坐标系下的开关状态。
三相二极管整流电路的输出端需要级联Boost电路以匹配三相PWM整流器的输出电压,为简化分析,将二极管整流电路输出电压等效为一恒定直流电压源UD,忽略线路等效电阻,此时Boost电路在三相静止坐标系下的数学模型为
 (2)
(2)
式中,d为占空比,d∈(0, 1)。
SCTDR与TAC在直流侧共用电容,由基尔霍夫电流定律可得
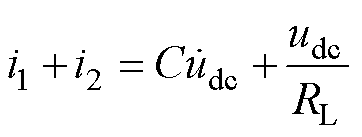 (3)
(3)
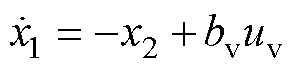
本文混合变换器控制系统结构如图3所示,在电压调节回路中采用改进超螺旋滑模控制器,在减轻抖振的同时增强系统响应速度;此外设计有限时间观测器,将负载以及外界干扰视为集总扰动并进行估计和补偿;外环控制器输出乘以相应比例系数作为内环电流参考值,将有源与无源模块之间功率的分配转化为对直流侧电流的分配。在电流跟踪回路设计重复控制器,与电流PI控制器配合实现对正弦基波和谐波电流的无静差控制和正弦量扰动的抑制。
根据式(3)可将系统的电压调节回路简化为一阶系统,有
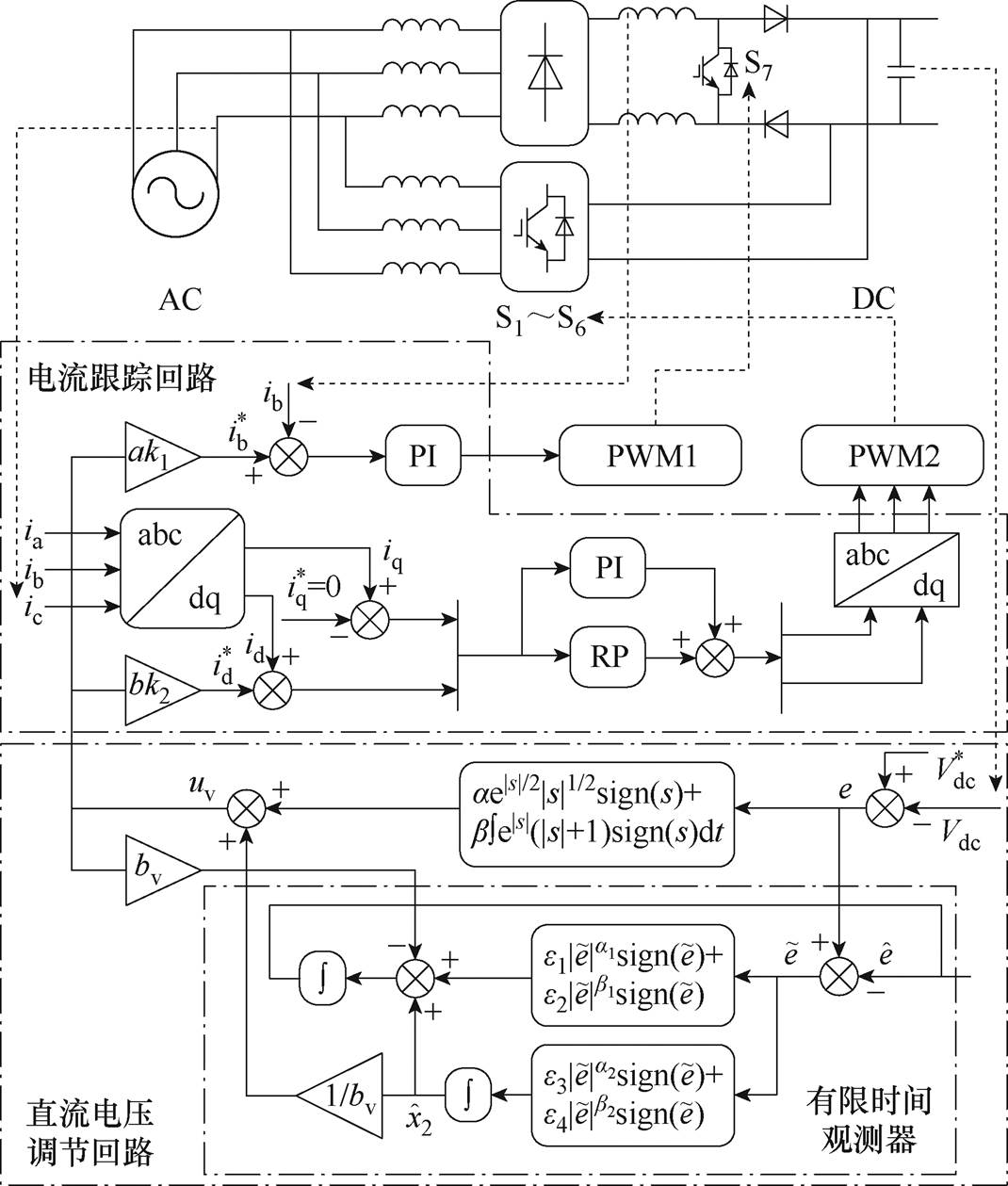
图3 混合变换器控制系统
Fig.3 Control system of hybrid converter
 (4)
(4)
式中, ;
; ,
, 为外界扰动;
为外界扰动; ;
; 。
。
定义 为直流母线电压参考值,e为直流母线电压跟踪误差,
为直流母线电压参考值,e为直流母线电压跟踪误差, ,其导数为
,其导数为
 ,设计滑模面为
,设计滑模面为
 (5)
(5)
式中,k为滑模面增益,为正常数。其一阶导数为
 (6)
(6)
为实现控制目标,本节提出了一种改进超螺旋滑模控制(Improved Super-Twisting Sliding Mode Control, ISTSMC)算法为
 (7)
(7)
式中, 和
和 为切换增益,均为正常数。
为切换增益,均为正常数。
本文所提出的ISTSMC与传统超螺旋滑模控制(Super-Twisting Sliding Mode Control, STSMC)的核心区别在于引入了基于滑模面距离 的指数自适应增益机制。这一机制使得控制器的增益能够根据系统状态(距离滑模面的远近)进行动态调整,而非STSMC中固定不变的增益。为了更清晰地理解这一机制,可以将ISTSMC表达为传统STSMC的形式,但其中嵌入了自适应增益项g1和g2,有
的指数自适应增益机制。这一机制使得控制器的增益能够根据系统状态(距离滑模面的远近)进行动态调整,而非STSMC中固定不变的增益。为了更清晰地理解这一机制,可以将ISTSMC表达为传统STSMC的形式,但其中嵌入了自适应增益项g1和g2,有
 (8)
(8)
式中, 为等效自适应比例增益,
为等效自适应比例增益, ;
; 为等效自适应积分增益,
为等效自适应积分增益, 。
。
当系统状态远离滑模面时,值较大。g1和g2会迅速增大,这使得控制器中的滑模项和超螺旋项的等效增益大幅提高。高增益使系统状态以更快的速度趋近滑模面,提升了系统的动态响应速度。当系统状态接近并最终在滑模面附近运动时,值变得很小,控制器增益自动降低到接近基础值(l, h),从而抑制高频抖振。ISTSMC通过自适应增益,在保证快速趋近的同时,降低了STSMC为了覆盖未知扰动上界的高增益依赖,抑制了系统抖振。
根据式(6)、式(7),控制律可设计为
 (9)
(9)
其中
根据式(4)可设计系统对应FTESO为
 (10)
(10)
式中, 为误差
为误差 的估计值;
的估计值; 为估计误差,
为估计误差, ;
; 为集总扰动x2的估计值;a1∈(1-ta, 1),ta、tb为大于零的最小正常数;b1∈(1, 1+tb);a2=2a1-1,b2=2b1−1;e1、e2、e3、e4均为待设计的观测器增益且均为正常数。
为集总扰动x2的估计值;a1∈(1-ta, 1),ta、tb为大于零的最小正常数;b1∈(1, 1+tb);a2=2a1-1,b2=2b1−1;e1、e2、e3、e4均为待设计的观测器增益且均为正常数。
针对系统模型式(4)所设计的FTESO(见式(10))对进行估计,且在如式(11)所示时间内收敛至原点。
 (11)
(11)
其中
 (12)
(12)
 (13)
(13)
式中, 为满足式(12)的对称正定矩阵。
为满足式(12)的对称正定矩阵。
根据式(10)可定义估计误差为
 (14)
(14)
式中,为的估计值,由FTESO估计获得; 为扰动估计误差。其一阶导数可表示为
为扰动估计误差。其一阶导数可表示为
 (15)
(15)
根据文献[18]中对观测器的有限时间收敛性分析,估计误差将会在式(11)所示时间内收敛至零。
控制律式(9)中的集总扰动可由式(10)所示的FTESO提供,从而将滑模控制器与FTESO结合,以提高系统动态响应速度与抗干扰能力,即
 (16)
(16)
图4为本文所提控制器与传统STSMC的输出对比,由于自适应增益与FTESO的加入,使得控制器输出抖振明显下降,从而保证内环参考信号稳定,进而提高电流质量。
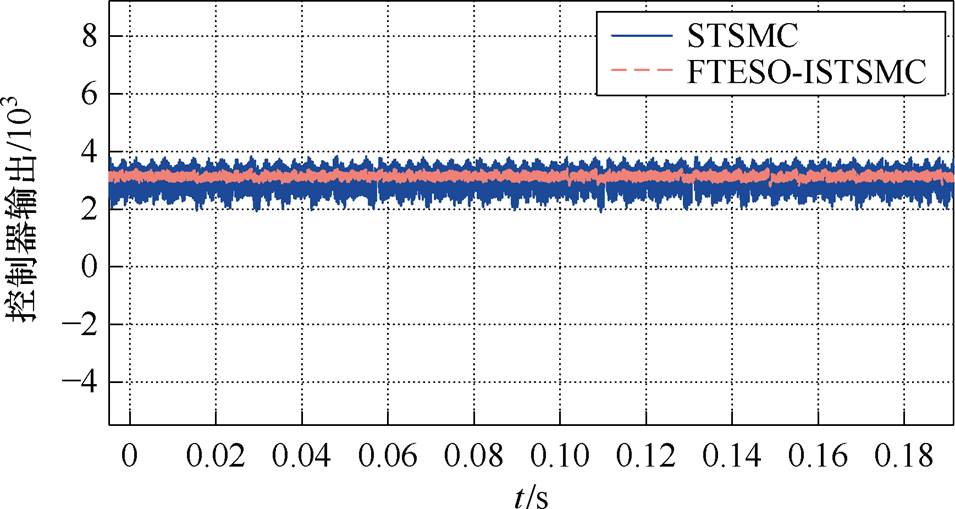
图4 抖振抑制效果对比
Fig.4 Comparison of chattering suppression effect
将式(16)代入式(6)可得
 (17)
(17)
为证明系统稳定性,将式(17)重新表示为
 (18)
(18)
式中, ,
, 。假设
。假设 有界,即
有界,即 。
。
由于滑模面函数 中包含了
中包含了 与
与 ,而与也包含了,故而选择定义向量
,而与也包含了,故而选择定义向量 ,设计Lyapunov函数为
,设计Lyapunov函数为
 (19)
(19)
式中, 为正定矩阵,其值为
为正定矩阵,其值为
 (20)
(20)
由于对的导数为
 (21)
(21)
故的一阶导数为
 (22)
(22)
 的导数为
的导数为
 (23)
(23)
其中
根据式(19)~式(23)可得V的一阶导数为

 (24)
(24)
其中
由于Lyapunov函数满足
 (25)
(25)
式中, 和
和 为矩阵的最小与最大特征值;
为矩阵的最小与最大特征值; 为
为 的欧氏范数。
的欧氏范数。
故而结合式(21)、式(24)、式(25)可知V的一阶导数满足
 (26)
(26)
由于
 (27)
(27)
由式(26)、式(27)可得
 (28)
(28)
其中
 (29)
(29)
当 即式(30)成立时,控制系统在有限时间内能够达到稳定。
即式(30)成立时,控制系统在有限时间内能够达到稳定。
 (30)
(30)
在对上述FTESO-ISTSMC进行参数整定时,首先选取式(5)中的参数k为较小的正常数,保证系统到达稳态时 ,k越大,收敛速度越快,但可能放大噪声;然后根据式(16),基于传统超螺旋算法选择
,k越大,收敛速度越快,但可能放大噪声;然后根据式(16),基于传统超螺旋算法选择 与
与 ,二者的理论初始值满足:
,二者的理论初始值满足:
 ,逐步增大至系统响应快速且无超调,逐步增大可抑制系统稳态误差,但要避免积分饱和导致过大的抖振。然后加入有限时间观测器,a1、b1的选择需要满足a1<1、b1>1,且a1越接近1,收敛速度越快,过小的a1可能导致收敛缓慢或振荡;理论上b1越大,收敛速度越快,但为保证其可实现性和收敛时间的稳定,应选择b1略大于1。观测器增益e1、e2、e3、e4的选取需满足特征矩阵E1、E2具有Hurwitz特性,在此基础上可适当增大增益值以提高观测速度,但需注意增益过大会加剧噪声放大,导致估计精度下降。应根据期望的估计质量与响应速度合理选择参数,直至获得满意的动态和稳态性能。
,逐步增大至系统响应快速且无超调,逐步增大可抑制系统稳态误差,但要避免积分饱和导致过大的抖振。然后加入有限时间观测器,a1、b1的选择需要满足a1<1、b1>1,且a1越接近1,收敛速度越快,过小的a1可能导致收敛缓慢或振荡;理论上b1越大,收敛速度越快,但为保证其可实现性和收敛时间的稳定,应选择b1略大于1。观测器增益e1、e2、e3、e4的选取需满足特征矩阵E1、E2具有Hurwitz特性,在此基础上可适当增大增益值以提高观测速度,但需注意增益过大会加剧噪声放大,导致估计精度下降。应根据期望的估计质量与响应速度合理选择参数,直至获得满意的动态和稳态性能。
由于SCTDR的输入电流呈现周期性突变,这将导致TAC的期望输入电流也具有周期性突变特性。然而由于TAC无法快速跟踪突变的电流,输入电流会产生周期性的畸变,从而引发低频谐波。为此,本文将重复控制器与PI控制器相结合,以实现正弦基波和谐波电流的无静差控制,还可有效抑制正弦扰动的影响。此外,本文将混合变换器的网侧总输入电流作为TAC电流内环控制回路的反馈值,从而将其控制目标转变为实现总输入电流的正弦化。重复控制结构如图5所示,图中,R(z)为输入信号,E(z)为误差信号,U(z)为控制器输出信号,Y(z)为输出信号。

图5 重复控制系统
Fig.5 Repetitive control system
图5中点画线框部分为重复控制器内模,其传递函数为
 (31)
(31)
Q(z)越大,系统的稳态误差跟踪精度越高,同时系统的稳定性越差,为使系统稳定,Q(z)一般为略小于1的常数或者低通滤波器,本文选择Q(z)= 0.95。
z-N为周期延时环节,N为采样次数,其数值为
 (32)
(32)
式中,Tg为电网基波周期;Ts为电流内环采样周期。
C(z)为补偿环节,用于矫正系统在低频段的幅值与相位,同时使高频干扰信号得到有效衰减,其组成为
 (33)
(33)
式中,Kr为重复控制器增益,通常取0~1之间的常数,本文Kr=1;zk为超前环节,其设计目的为补偿滤波器S(z)和被控对象产生的相位滞后,本文取k=5;S(z)为待设计滤波器。
为提高系统稳定性和高频衰减特性,S(z)采用如式(34)所示二阶低通滤波器,截止频率fc= 1 500 Hz,阻尼比x=0.707,采用零阶保持器可将其离散化为
 (34)
(34)
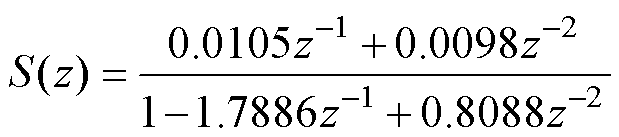 (35)
(35)
重复控制能够有效地消除周期性扰动,并确保系统的输出精确跟踪给定的信号,但重复控制存在响应延迟,使得系统在处理快速变化或突发性干扰时表现不佳,PI控制具有较快的动态响应特性,并且通过积分器能够矫正稳态误差,因此,本文将重复控制器与PI控制器相结合应用于系统电流内环控制中,其控制结构如图6所示。
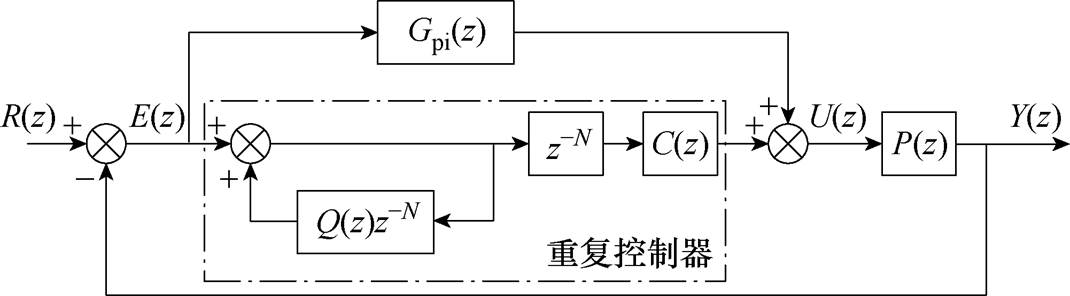
图6 PI+重复控制系统
Fig.6 PI and repetitive control system
PI控制器离散域传递函数为
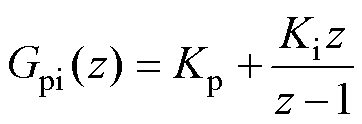 (36)
(36)
式中,Kp、Ki为控制器增益,Kp=40、Ki=4。
将其引入重复控制中可得PI重复控制离散域传递函数为
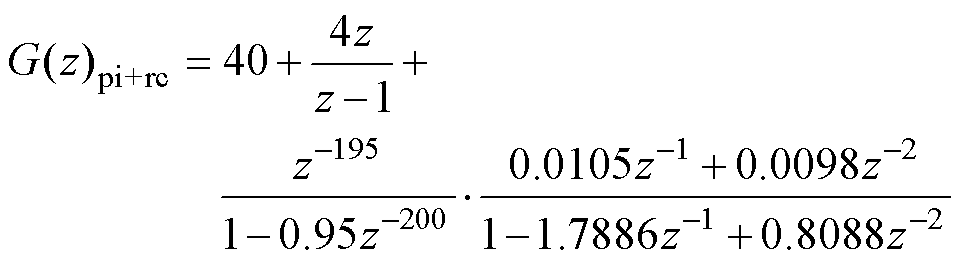 (37)
(37)
为验证本文所提控制方法的控制性能,本节对PI控制、STSMC以及本文所提出的FTESO- ISTSMC三种控制策略进行了对比实验验证。实验样机采用110 V/50 Hz三相交流电供电;开关频率为10 kHz;额定功率为2.25 kW;TAC前端滤波电感为3 mH;SCTDR前端滤波电感为0.5 mH;直流侧升压电感为2 mH;直流侧参考电压为300 V,直流侧电容为1 100 mF。为保证控制系统正常运行,所有控制器均进行了调优,其参数见表1。
表1 控制器参数
Tab.1 Controller parameter
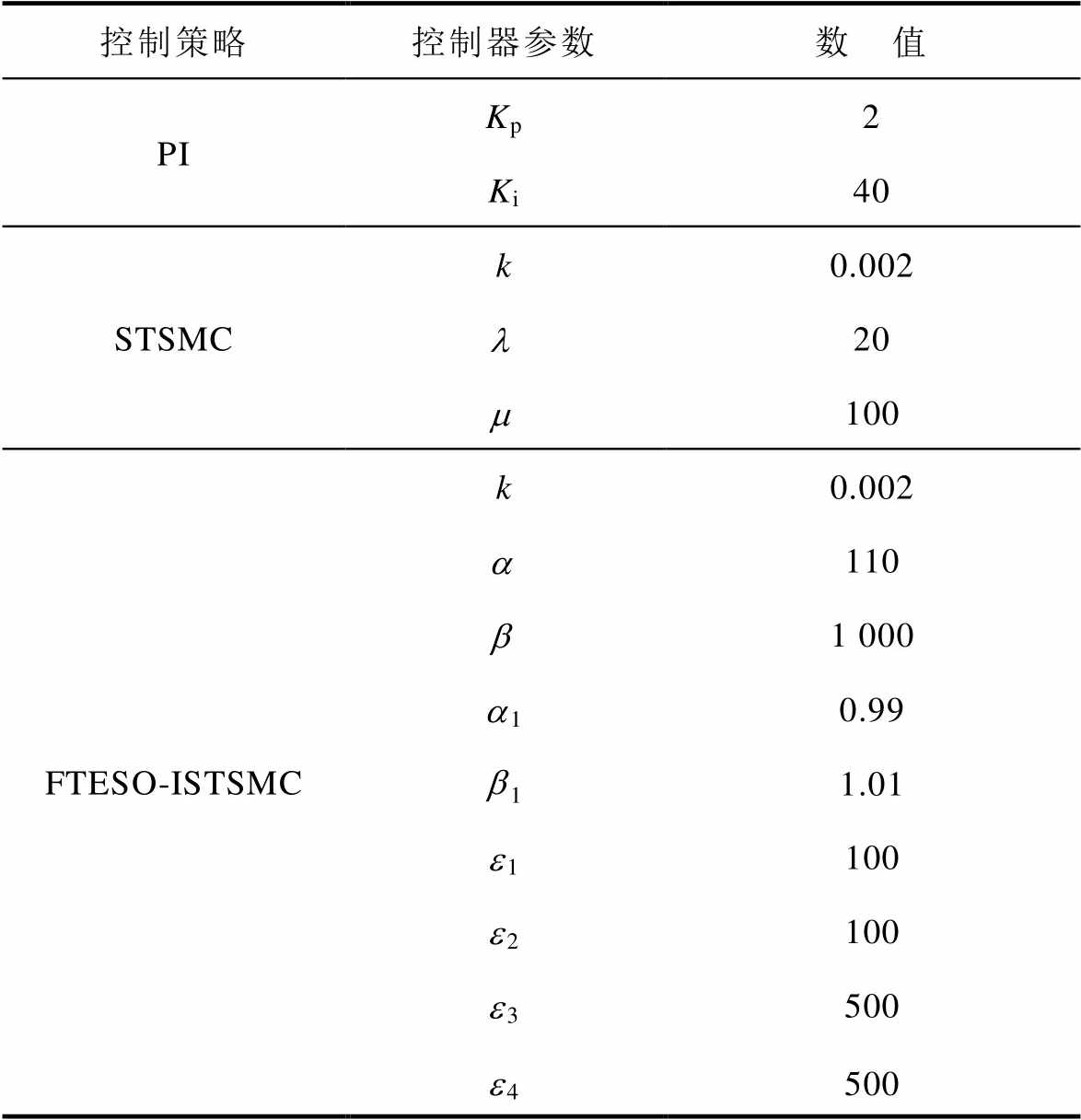
控制策略控制器参数数 值 PIKp2 Ki40 STSMCk0.002 l20 m100 FTESO-ISTSMCk0.002 a110 b1 000 a10.99 b11.01 e1100 e2100 e3500 e4500
图7为三相两电平PWM混合变换器工作于整流模式下时的交流侧电压电流波形,TAC与SCTDR平均功率分配,能量由交流侧流向直流侧,网侧电流呈正弦,功率因数约为0.999,总谐波畸变率(Total Harmonic Distortion, THD)为3.71%,满足 IEEE 519 对电流畸变小于5%的要求。图8为三相两电平PWM混合变换器由整流模式切换为逆变模式的电压电流波形,在逆变模式下交流侧电压电流反相,功率因数约为-0.999,能量由直流侧流向交流侧,实现能量回馈电网。
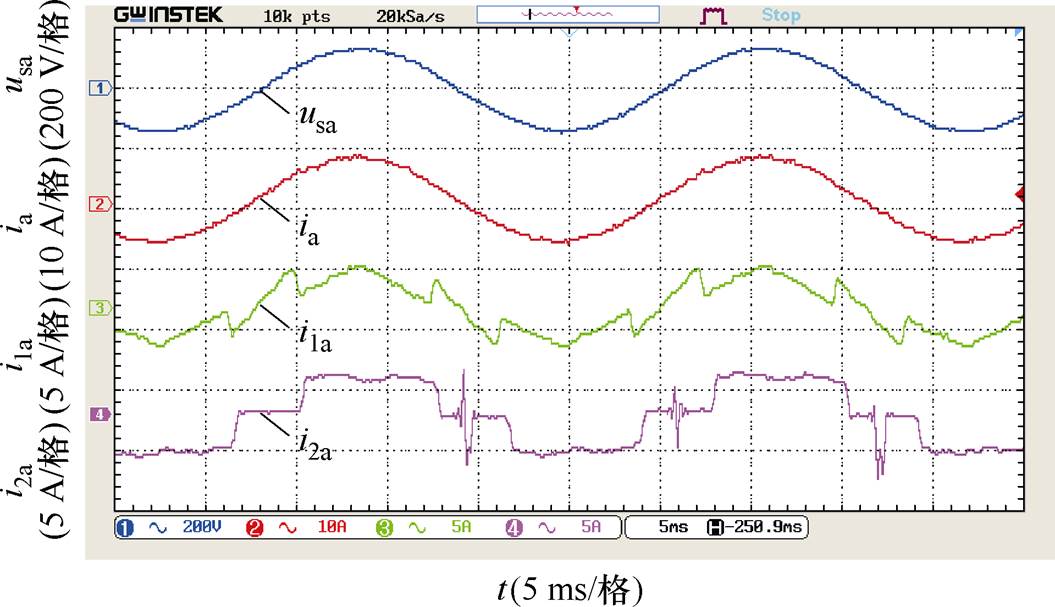
图7 混合变换器整流模式下输入电压电流波形
Fig.7 Input voltage and current waveforms in rectifier mode of hybrid converter
本文对三种控制方式的抗负载扰动性能进行了测试,结果如图9所示,变换器以300 V直流侧参考电压稳定运行,在0.3 s负载由7.5 A变化为15 A,直流侧电压出现短暂下降后恢复到参考值,在PI控制下系统经过36.2 ms回到稳态,电压下降约5.8 V;在STSMC策略下经过24.3 ms回到稳态,电压下降约4.3 V;在FTESO-ISTSMC策略下系统经过9.6 ms回到稳态,电压下降约1.8 V。在0.7 s负载由15 A变化为7.5 A,直流侧电压出现短暂上升后恢复到参考值,在PI控制下系统经过52.3 ms回到稳态,电压上升约5.7 V;在STSMC策略下系统经过26.2 ms回到稳态,电压上升约4.5 V;在FTESO-ISTSMC策略下系统经过11.0 ms回到稳态,电压上升约1.8 V。由此实验结果可知本文所提出的控制方法具有更加优异的抗负载扰动性能。
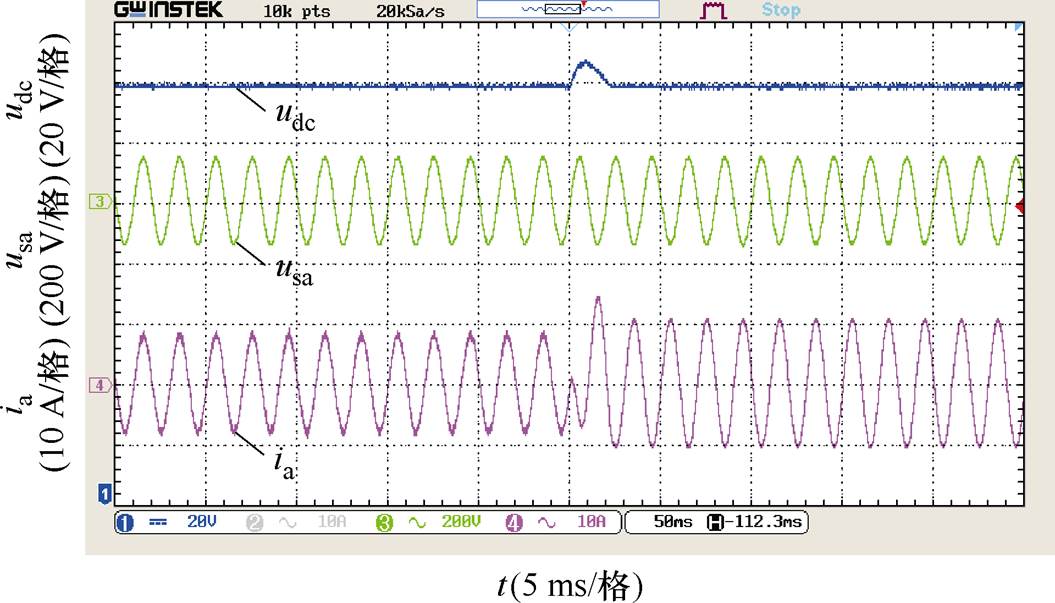
图8 整流模式切换为逆变模式下的电压电流波形
Fig.8 The voltage and current waveforms when the rectifier mode is switched to the inverter mode
图9 负载突变条件下的输出电压、输入电压电流波形
Fig.9 Output voltage, input voltage and current waveforms under load variation
本文进一步对三种控制方式的直流稳压性能进行了测试,结果如图10所示。变换器在直流侧负载RL=40 W条件下稳定运行,在0.3 s直流侧参考电压由300 V突变到350 V,在PI控制下暂态过程持续43 ms,电压超调约为7.2 V;在STSMC策略下暂态过程持续37.4 ms,电压超调约为3.0 V;在FTESO-ISTSMC策略下暂态过程持续22.7 ms,电压超调约为1.6 V;在0.7 s直流侧参考电压由350 V突变到300 V,在PI控制下暂态过程持续43 ms,电压沉降约为11.7 V;在STSMC策略下暂态过程持续37.4 ms,电压沉降约为3.4 V;在FTESO- ISTSMC策略下暂态过程持续22.7 ms,电压沉降约为2.9 V;由此实验结果可知,本文所提出的控制方法具有更加优异的直流稳压性能。
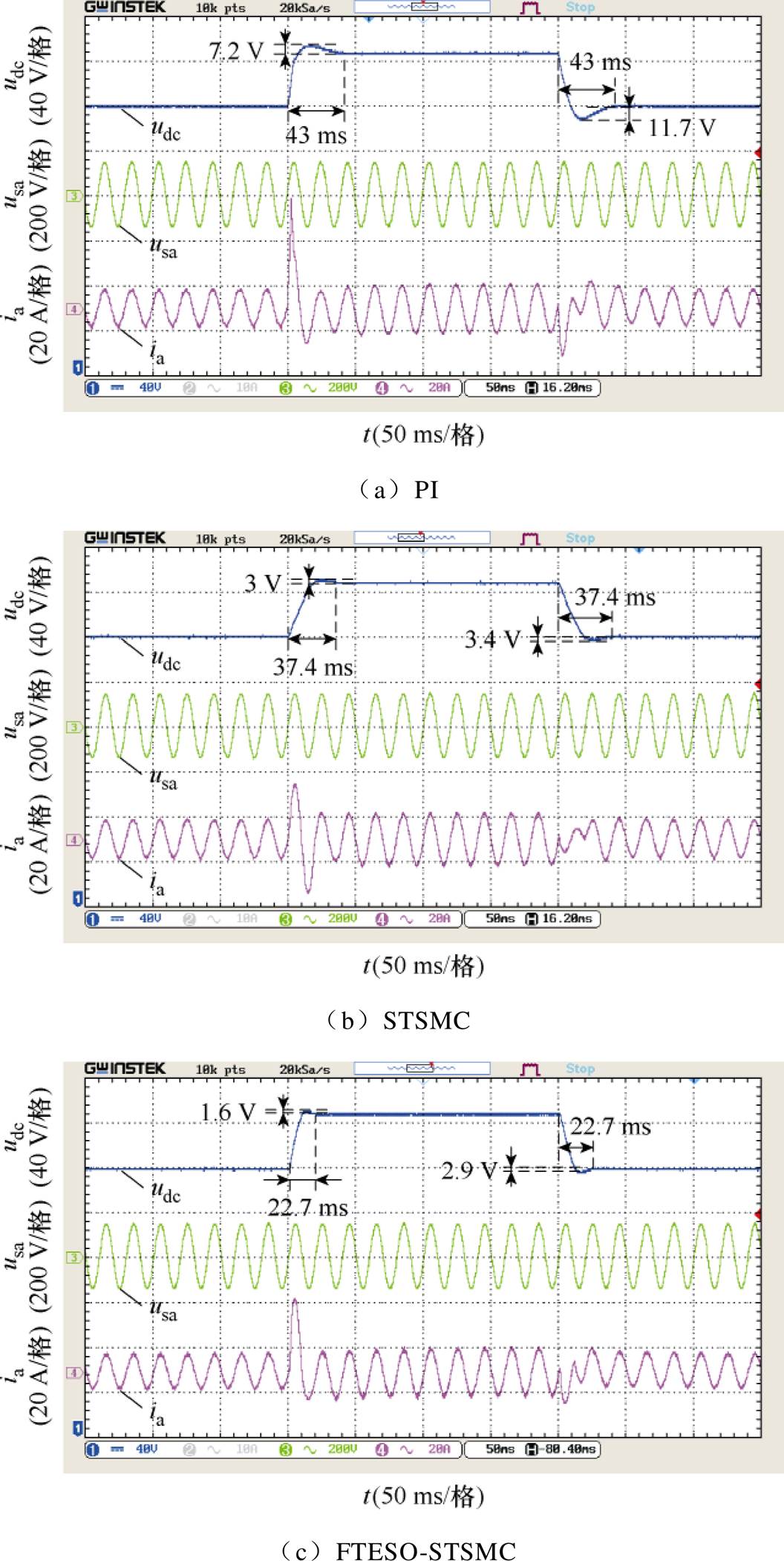
图10 电压阶跃条件下的输出电压、输入电压、电流波形
Fig.10 Output voltage, input voltage current waveforms when the reference voltage step
本文最后验证了电网电压波动(下降10%)时,三种控制方式的鲁棒性能,结果如图11所示,直流侧电压随着网侧电压的下降有着短时的下降然后恢复给定值。在PI控制下暂态过程持续43.06 ms,电压下降约1.03 V;在STSMC控制策略下暂态过程持续约5.28 ms,电压下降约0.63 V;在FTESO-ISTSMC策略下暂态过程持续约2.02 ms,同时直流侧电压无明显下降。由实验结果可知,本文所设计的控制系统对于电网电压波动也具有优秀的鲁棒性。
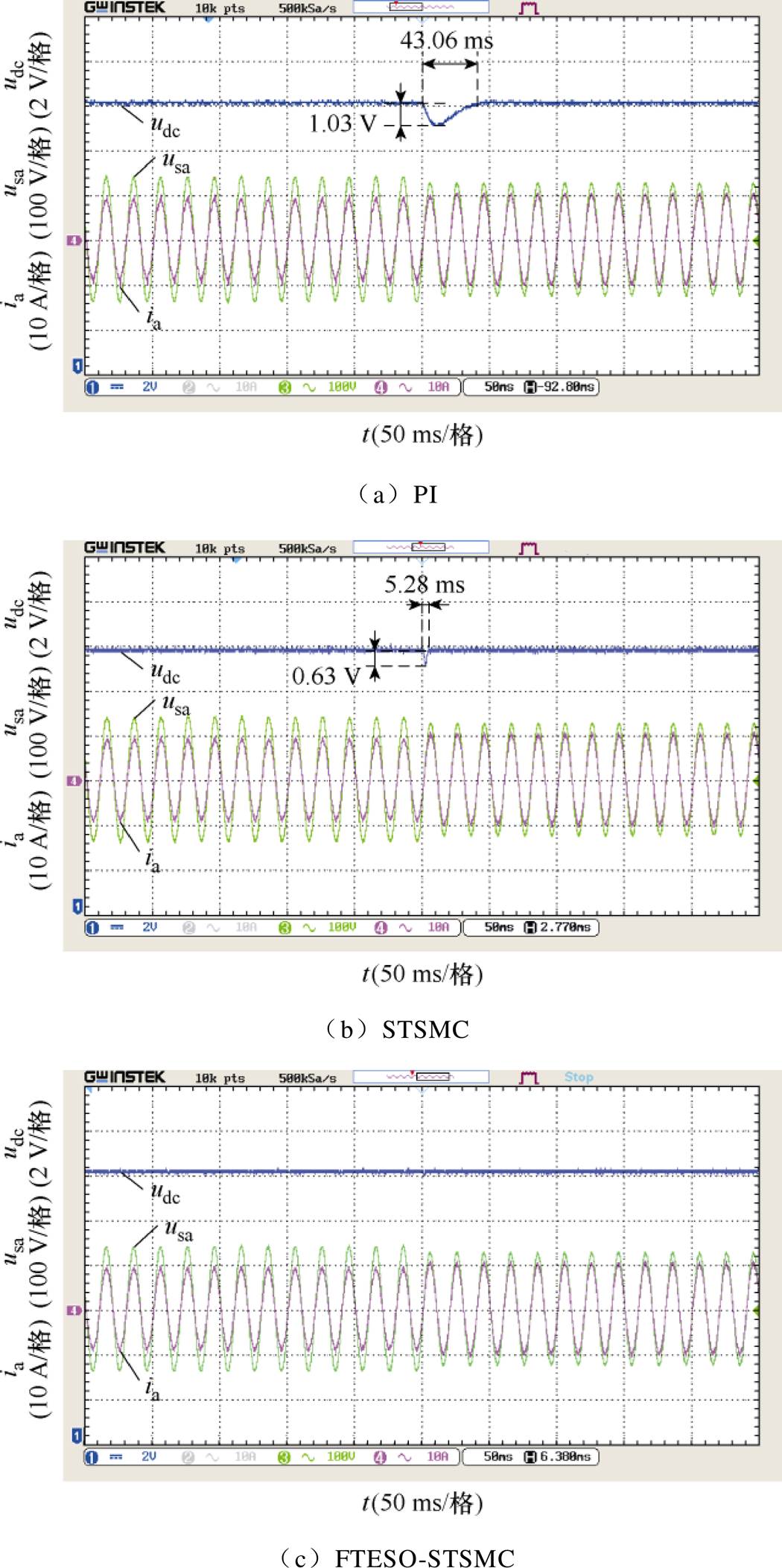
图11 电网电压波动(下降10%)条件下的输出电压、输入电压、电流波形
Fig.11 Output voltage, input voltage current waveforms under grid voltage fluctuations (10% drop)
本文针对三相混合变换器提出了一种基于有限时间观测器的改进超螺旋滑模控制策略。通过改进超螺旋滑模算法,引入指数自适应增益机制,以获得更快的响应速度和稳态性能,此外,为了获得更快的收敛速度和更高的估计精度,采用了FTESO来估计集总扰动,通过前馈补偿进一步增强了系统的抗干扰能力。最后设置PI、STSMC和FTESO- ISTSMC的对比实验,结果表明所提控制策略在负载突变、电压阶跃以及输入电压波动工况下仍能保持稳定运行且动态效果均优于传统控制方法,为混合变换器在微电网等场景下的高可靠性运行提供了有效解决方案。
参考文献
[1] 王浩, 仵哲, 康博阳, 等. 考虑电动汽车和蓄电池联合储能的交直流混合微电网功率协调控制策略[J]. 电工技术学报, 2024, 39(19): 6085-6103.
Wang Hao, Wu Zhe, Kang Boyang, et al. Power coordinated control strategy for AC/DC hybrid micro- grid considering combined energy storage of electric vehicles and batteries[J]. Transactions of China Elec- trotechnical Society, 2024, 39(19): 6085-6103.
[2] 王力, 胡佳成, 曾祥君, 等. 基于混合储能的交直流混联微电网功率分级协调控制策略[J]. 电工技术学报, 2024, 39(8): 2311-2324.
Wang Li, Hu Jiacheng, Zeng Xiangjun, et al. Hierarchical coordinated power control strategy for AC-DC hybrid microgrid with hybrid energy storage[J]. Transactions of China Electrotechnical Society, 2024, 39(8): 2311-2324.
[3] 王浩, 聂晶莹, 李斌, 等. 电网电压不平衡下交直流混合微电网互联接口变换器分数阶滑模控制策略[J]. 电力系统保护与控制, 2023, 51(16): 94-103.
Wang Hao, Nie Jingying, Li Bin, et al. Fractional order sliding mode control strategy of AC/DC hybrid microgrid interconnection interface converter under grid voltage imbalance[J]. Power System Protection and Control, 2023, 51(16): 94-103.
[4] 张国驹, 裴玮, 杨鹏, 等. 中压配电网柔性互联设备的电路拓扑与控制技术综述[J]. 电力系统自动化, 2023, 47(6): 18-29.
Zhang Guoju, Pei Wei, Yang Peng, et al. Review on circuit topology and control technology of flexible interconnection devices for medium-voltage distribution network[J]. Automation of Electric Power Systems, 2023, 47(6): 18-29.
[5] Soeiro T B, Kolar J W. Analysis of high-efficiency three-phase two- and three-level unidirectional hybrid rectifiers[J]. IEEE Transactions on Industrial Elec- tronics, 2013, 60(9): 3589-3601.
[6] Meng Xin, Chen Maolin, He Mingzhi, et al. A novel high power hybrid rectifier with low cost and high grid current quality for improved efficiency of elec- trolytic hydrogen production[J]. IEEE Transactions on Power Electronics, 2021, 37(4): 3763-3768.
[7] 李萍, 王久和, 李建国, 等. 单向混合整流器无源电流控制[J]. 电工技术学报, 2020, 35(21): 4511-4523.
Li Ping, Wang Jiuhe, Li Jianguo, et al. A passivity- based current control strategy for unidirectional hybrid rectifier[J]. Transactions of China Electro- technical Society, 2020, 35(21): 4511-4523.
[8] 储炜, 林黄达, 易新强. 基于三重旋转坐标变换的双三相永磁同步电机模型预测电流控制策略[J]. 电工技术学报, 2024, 39(增刊1): 51-63.
Chu Wei, Lin Huangda, Yi Xinqiang. Model predi- ctive current control strategy for dual three-phase permanent magnet synchronous motors based on triple rotating coordinate transformation[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(S1): 51-63.
[9] 冉华军, 王新权, 王灿, 等. 基于LADRC和准PR控制的风电并网逆变器控制策略[J]. 三峡大学学报(自然科学版), 2024, 46(5): 76-84.
Ran Huajun, Wang Xinquan, Wang Can, et al. Wind power grid-connected inverter control strategy based on LADRC and quasi-PR control[J]. Journal of China Three Gorges University (Natural Science), 2024, 46(5): 76-84.
[10] 周杰, 皇金锋, 黄红杰. 光储一体化变流器改进滑模自抗扰控制[J]. 电工技术学报, 2025, 40(2): 504- 516, 530.
Zhou Jie, Huang Jinfeng, Huang Hongjie. Improved sliding mode active disturbance rejection control strategy for PV-storage integrated converter[J]. Transactions of China Electrotechnical Society, 2025, 40(2): 504-516, 530.
[11] 张伟琦, 王艳敏, 宋凯, 等. 考虑参数扰动的风力发电系统并网逆变器积分型连续滑模控制策略[J]. 电工技术学报, 2025, 40(22): 7313-7333.
Zhang Weiqi, Wang Yanmin, Song Kai, et al. Integrated continuous sliding mode control strategy of grid-connected inverter for wind power system con- sidering parameter perturbation[J]. Transactions of China Electrotechnical Society, 2025, 40(22): 7313- 7333.
[12] 周世炯, 李耀华, 史黎明, 等. 分段供电永磁直线同步电机的新型滑模速度控制策略[J]. 电工技术学报, 2025, 40(8): 2464-2476.
Zhou Shijiong, Li Yaohua, Shi Liming, et al. Novel sliding mode speed control strategy of permanent magnet linear synchronous motors with section power supply[J]. Transactions of China Electrotechnical Society, 2025, 40(8): 2464-2476.
[13] 王业琴, 杨艳, 李正豪, 等. Boost型PFC变换器的自适应超螺旋全局滑模控制[J]. 电机与控制学报, 2024, 28(4): 111-119, 130.
Wang Yeqin, Yang Yan, Li Zhenghao, et al. Adaptive super twisting total sliding mode control for Boost- type PFC converter[J]. Electric Machines and Control, 2024, 28(4): 111-119, 130.
[14] Komurcugil H, Bayhan S, Guler N, et al. A new exponential reaching law approach to the sliding mode control: a multilevel multifunction converter application[J]. IEEE Transactions on Industrial Electronics, 2023, 70(8): 7557-7568.
[15] Khan S A, Guo Youguang, Siwakoti Y P, et al. A disturbance rejection-based control strategy for five- level T-type hybrid power converters with ripple voltage estimation capability[J]. IEEE Transactions on Industrial Electronics, 2020, 67(9): 7364-7374.
[16] Liu Jinglin, Li Mengqi, Xie En. Noncascade structure equivalent SMC for PMSM driving based on improved ESO[J]. IEEE Transactions on Power Electronics, 2024, 40(1): 611-624.
[17] Liu Zhuang, Liu Jianxing, Ouyang Zhang, et al. Adaptive disturbance observer-based fixed-time tracking control for uncertain robotic systems[J]. IEEE Transactions on Industrial Electronics, 2024, 71(11): 14823-14831.
[18] Basin M, Yu P, Shtessel Y. Finite- and fixed-time differentiators utilising HOSM techniques[J]. IET Control Theory & Applications, 2017, 11(8): 1144- 1152.
[19] 黄红杰, 皇金锋, 周杰. 基于有限时间观测器的两级式储能变流器改进滑模自抗扰控制[J]. 电工技术学报, 2025, 40(1): 178-189.
Huang Hongjie, Huang Jinfeng, Zhou Jie. Improved sliding mode active disturbance rejection control for two-stage power conversion system based on finite time observer[J]. Transactions of China Electro- technical Society, 2025, 40(1): 178-189.
[20] 王立俊, 赵吉文, 盘真保, 等. 基于有限时间状态观测器的永磁同步直线电机递归终端滑模控制[J]. 中国电机工程学报, 2024, 44(2): 755-766.
Wang Lijun, Zhao Jiwen, Pan Zhenbao, et al. Recursive terminal sliding mode control of permanent magnet synchronous linear motor based on finite-time state observer[J]. Proceedings of the CSEE, 2024, 44(2): 755-766.
[21] Xie Tian, Xian Bin, Gu Xun, et al. Disturbance observer-based fixed-time tracking control for a tilt trirotor unmanned aerial vehicle[J]. IEEE Transa- ctions on Industrial Electronics, 2024, 71(4): 3894- 3903.
Abstract In the context of energy transition and carbon neutrality goals, distributed renewable energy technologies have accelerated the adoption of microgrid systems. Compared to traditional bidirectional converters, three-phase hybrid converters offer advantages such as high efficiency, increased power density, and lower maintenance costs, making them suitable for energy exchange in microgrids. However, these converters face challenges such as slow dynamic response, susceptibility to disturbances, and periodic current distortion due to inherent structural limitations.
In the DC-link voltage regulation loop, an improved super-twisting sliding mode controller (ISTSMC) is designed. The core mechanism of ISTSMC is an exponential adaptive gain based on the sliding mode surface distance  . It allows the controller gains to dynamically adjust according to the system state: when far from the sliding surface, gains are significantly increased to boost the dynamic response speed, conversely, when approaching or moving near the surface, gains automatically reduce towards their base value to effectively suppress high-frequency chattering. Load power and external disturbances are treated as a lumped disturbance and compensated for using a finite-time extended state observer (FTESO). The FTESO leverages dual-power terms (a1<1 and b1>1
. It allows the controller gains to dynamically adjust according to the system state: when far from the sliding surface, gains are significantly increased to boost the dynamic response speed, conversely, when approaching or moving near the surface, gains automatically reduce towards their base value to effectively suppress high-frequency chattering. Load power and external disturbances are treated as a lumped disturbance and compensated for using a finite-time extended state observer (FTESO). The FTESO leverages dual-power terms (a1<1 and b1>1 and appropriate observer gains (e1, e2, e3, e4) to satisfy Hurwitz stability. By integrating the ISTSMC with the FTESO, the DC-link voltage can achieve superior dynamic and steady-state performance. Finally, the stability of the FTESO-ISTSMC system is analyzed using the Lyapunov function, with a general derivation framework. Furthermore, to mitigate periodic abrupt changes in the input currents of a three-phase hybrid converter, the design of the current inner loop controller considers the total input current on the AC side of the hybrid converter as the feedback value of the control loop. Then, its control objective is changed to achieving sinusoidal shaping of the total input current. Meanwhile, PI repeat control is adopted to attain static control of sinusoidal fundamental waves and harmonic currents.
and appropriate observer gains (e1, e2, e3, e4) to satisfy Hurwitz stability. By integrating the ISTSMC with the FTESO, the DC-link voltage can achieve superior dynamic and steady-state performance. Finally, the stability of the FTESO-ISTSMC system is analyzed using the Lyapunov function, with a general derivation framework. Furthermore, to mitigate periodic abrupt changes in the input currents of a three-phase hybrid converter, the design of the current inner loop controller considers the total input current on the AC side of the hybrid converter as the feedback value of the control loop. Then, its control objective is changed to achieving sinusoidal shaping of the total input current. Meanwhile, PI repeat control is adopted to attain static control of sinusoidal fundamental waves and harmonic currents.
Finally, the experimental verification was conducted on a 2.25 kW prototype. Utilizing the ISTSMC-FTESO strategy, the hybrid converter demonstrates effective operation in rectifying and inverting modes. During rectification, the power factor approaches 0.999, while the total harmonic distortion is 3.71%, compliant with the IEEE 519 standard. During inversion, the power factor approximates -0.999. Energy exchange between its two sides is accomplished by transitioning between rectification and inversion modes. PI control, super-twisting sliding mode control (STSMC), and FTESO-ISTSMC are compared. Under the condition of sudden load drop, FTESO-ISTSMC reduces dynamic response time by 73.5% and 60.7%, and decreases DC-link voltage dip magnitude by 68.9% and 58.1%, compared to PI control and STSMC, respectively. Under the condition of a sudden load increase, the dynamic response time is reduced by 79.0% and 58.0%, and the DC-link voltage rise magnitude is decreased by 68.4% and 60.0%. Under reference voltage rise conditions, the dynamic response time is reduced by 47.6% and 39.3% and the voltage overshoot magnitude is reduced by 77.8% and 46.7%. During the reference voltage drop, the dynamic response time is reduced by 36.5% and 29.4%, and the voltage overshoot magnitude is reduced by 75.2% and 14.7%. For a 10% input voltage drop, the dynamic response time is reduced by 95.3% and 61.7%, with no significant drop in the DC side voltage. Experimental results demonstrate that the proposed scheme maintains stable operation under load transients, voltage step variations, and input voltage fluctuations, providing an effective solution for high-reliability operation of hybrid converters in microgrid applications.
keywords:AC-DCmicrogrid, hybrid converter, sliding mode control, finite-time state observer, chattering suppression
DOI: 10.19595/j.cnki.1000-6753.tces.250732
中图分类号:TM46
国家自然科学基金项目(52377191)和湖北省自然科学基金项目(2024AFB584)资助。
收稿日期 2025-04-30
改稿日期 2025-06-25
马 辉 男,1985年生,博士,副教授,研究方向为新能源及电力变换技术等。E-mail: mahuizz119@126.com(通信作者)
李昊轩 男,2000年生,硕士研究生,研究方向为电路拓扑与控制。E-mail: lihx7486@163.com
(编辑 陈 诚)