图1 典型DVR系统结构
Fig.1 Structure of typical DVR system
摘要 为了应对低压配电网多场景、多容量电压暂降补偿的需求,该文提出一种不含储能的模块化动态电压恢复器(DVR)并联系统及控制方法。首先,通过领航模块快速检测电压暂降并下发状态切换指令至各跟随模块,使各模块以准同步方式实现旁路晶闸管强迫关断。其次,在领航模块中部署电压调节器生成电流参考,通过以太网通信下发电流参考和前馈电压信号至各跟随模块,实现模块化DVR并联系统对电压暂降的有效补偿。为了克服通信延迟等对系统稳定性的影响,该文定量分析不同并联模块数、通信延迟、控制器参数下系统稳定裕度的变化规律。最后,通过RT-Lab硬件在环仿真平台验证了所提系统及控制方法在多组工况和参数下的有效性和稳定性。
关键词:动态电压恢复器 电压暂降 无隔离变压器 多机并联系统
随着高比例分布式新能源和电力电子设备规模化接入低压配电网,配电网络中的多类电能质量问题日益突出。其中,因线路和设备短路、冲击性潮流事故等导致的电压暂降问题造成的影响尤其显著[1]。目前,工程上常采用不间断电源系统(Uninterrupted Power System, UPS)、统一电能质量调节器等装置来应对电压暂降问题[2]。但传统UPS等装置控制复杂、能耗高,难以捕捉和补偿快速电压波动,使得其推广和应用受到了较大限制。串联型动态电源恢复器(Dynamic Voltage Restorer, DVR)作为部分容量补偿装置,可有效利用电网残余电压,效率高,可在无储能条件下实现较好的电压补偿[3],是目前治理电压暂降问题最直接、经济的选择。
目前,配电网要求DVR的容量具备差异化。在线路首端通常要求设备具备高补偿容量,而在线路末端补偿容量相对较小。多机并联的方式可有效解决单台DVR设备难以兼顾线路的不同容量补偿需求[4];另一方面,采用单台设备进行暂降补偿时,如果设备发生故障导致退出运行将会导致补偿失效[5],而多机并联方式可显著增加系统容错运行能力,因此,迫切需求对DVR多机并联系统及控制方法研究[6]。
目前多机并联技术在微电网及UPS等场景中得到广泛应用[7-14]。主流的逆变器并联运行控制技术有集中控制[8]、主从控制、分散逻辑控制和分布式控制四种。其中分布式控制为无通信线控制,包括下垂控制、虚拟同步机控制等[9],具有可扩展性、模块化、冗余性和灵活性等特点[10],在并联逆变器中应用广泛。文献[11]采用传统下垂控制通过有功-频率和无功-电压调节实现功率分配。文献[12]通过模拟同步发电机特性实现了无通信功率均衡,但两者的功率分配精度受线路阻抗偏差的影响较为显著。在此基础上,文献[13]提出了虚拟阻抗补偿、自适应下垂系数调整等改进策略来抑制线路阻抗不匹配对系统均流特性的影响,但存在需要权衡输出电压调节和功率共享精度之间的关系以及动态性能差等问题。为了改良这一缺点,文献[14]将虚拟振荡器应用于并联逆变器,可以实现更快的瞬态响应,但仍存在参数敏感、无法应对电网电压发生快速暂态波动的场景。
需要注意的是,并联逆变器等系统电压比较稳定,而DVR在电压暂降补偿期间电压幅值快速变化[15],导致传统分布式并联方法难以保障DVR补偿期间的均流特性。为了克服这一挑战,本文提出了一种模块化DVR多机并联控制方法,通过领航模块判断电压暂降并下发状态切换指令至各跟随模块,快速关断各模块旁路晶闸管。在各晶闸管可靠关断后,以准同步的形式进入电压补偿模态,通过领航模块执行电压控制,分配电流参考与电压前馈信号给各跟随模块,从而实现了模块化DVR多机并联系统的快速电压补偿和电流均衡。在此基础上,进一步分析了通信延迟、并联模块数量等参数对于系统稳定性的影响。最后通过实时仿真验证了所提多机并联系统控制方法的可行性。
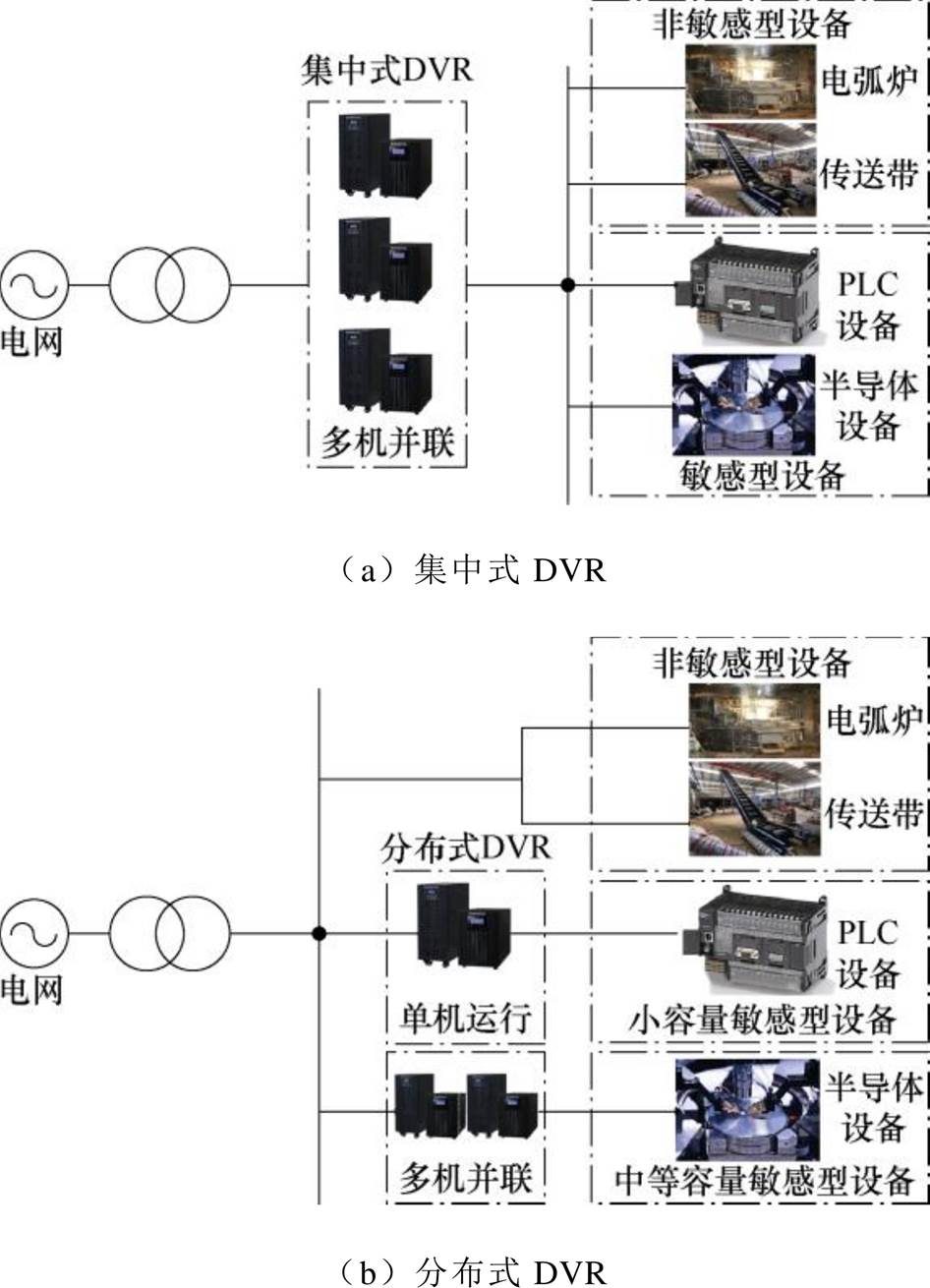
集中式和分布式DVR系统结构分别如图1a和图1b所示[16]。在图1a集中式结构中,DVR位于变压器出口侧,为保证电网暂降下敏感负载稳定供电,DVR容量需达到负载总容量,因此通常采用多模组DVR并联方式。而在图1b所示的分布式结构中,DVR位于敏感性负载出口侧,此时DVR模组仍需并联运行以满足不同容量负荷需求。目前两种结构均得到广泛的应用,但对多模组DVR并联运行提出了较高要求。
图1 典型DVR系统结构
Fig.1 Structure of typical DVR system
所提非隔离型模块化DVR并联系统拓扑如图2所示,所提模块化DVR多机并联系统由n个DVR模块组成,其中第1个为领航模块,其余为跟随模块,各模块信号通过以太网(Ether CAT)通信总线进行传输。图2下侧为单机DVR拓扑,以A相电路为例,功率电路由五部分组成,包括双向续流晶闸管(VT1、VT2)及支路限流电感(Lscr)、半桥电路开关管(S1、S2)、二极管整流器(VD1~VD6)、直流母线电容(C1、C2)、电网侧滤波器(Lg、Cg)、输出滤波器(Lf、Cf)。双向晶闸管连接在电网与负载间,A相电压经过Lg接入直流母线中点,B、C相电压则接入三相整流桥。在B相和C相对应的单相拓扑中,相应的火线接入对应的直流母线中点。
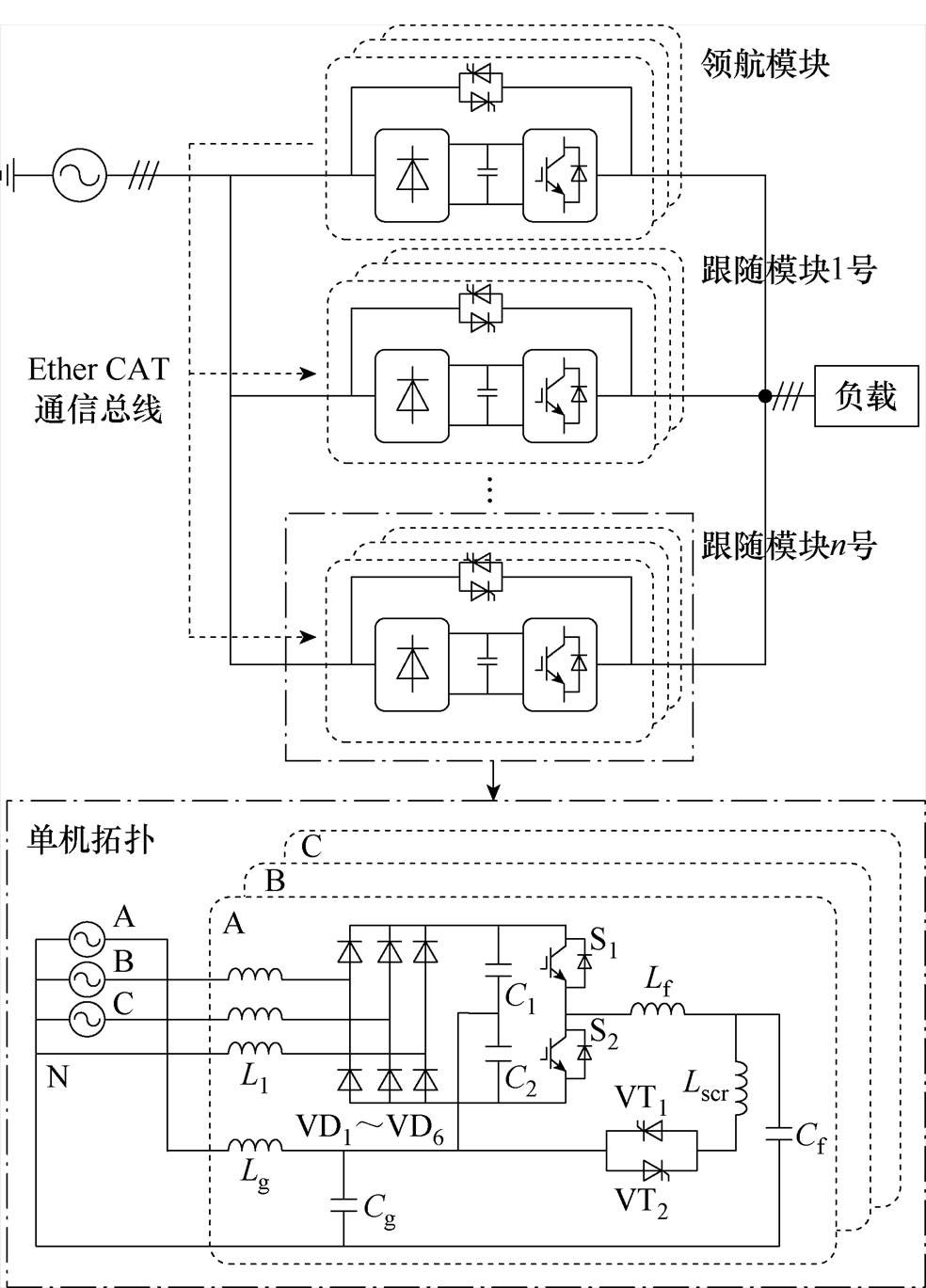
图2 所提非隔离型模块化DVR并联系统拓扑
Fig.2 Topology of the proposed non-isolated modular DVR parallel system
图3描述了单机DVR模块A相电路的工作模态。模态一如图3a所示,此时电网电压正常,双向可控硅晶闸管(Silicon Controlled Rectifier, SCR)保持导通状态,而半桥电路处于关闭状态,电网电压经SCR直接为负载供电;模态二如图3b所示,电网电压发生暂降,通过半桥电路输出关断电压快速闭锁晶闸管,在尚未关断时SCR与半桥电路均处于工作状态。模态三如图3c所示,当晶闸管被彻底关断后,设备进入电压补偿模态进行电网电压暂降补偿,此时只有半桥电路处于工作状态。
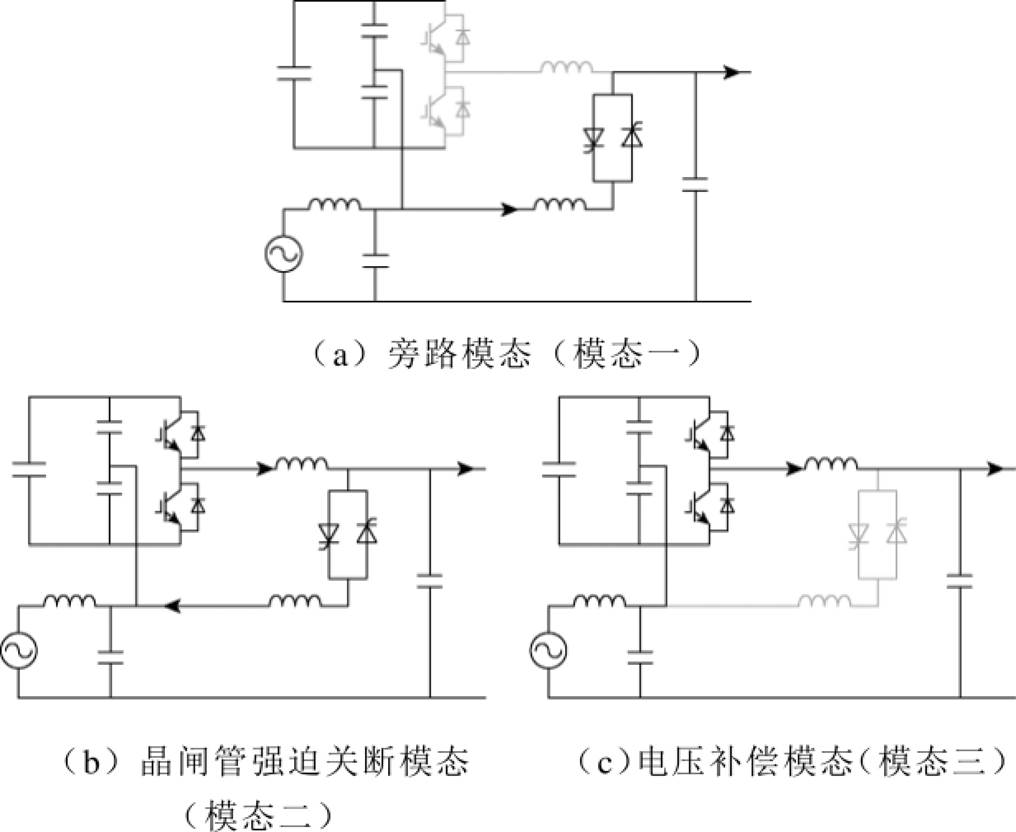
图3 单机DVR各运行模态
Fig.3 Operation modes of the standalone DVR
对于模块化DVR多机并联系统,考虑到不同模块间通信延迟、电路参数等并不完全相同,本文进一步讨论了DVR多机并联系统的5个工作模态,如图4所示。图4a(模态1)表明在电网电压正常时,领航模块与跟随模块均处于旁路模态。图4b(模态2)表明电网发生暂降时,领航模块检测到电压暂降并进入强迫关断模态,下发模态切换指令至跟随模块,由于后者接收到切换指令具有一定的延迟,跟随模块在这段模态切换窗口期仍处于短暂旁路模态。模态3与模态4分别对应了图4c、图4d,描述了在跟随模块接收到暂降状态信号后,进入强迫关断模态,而领航模块此时存在SCR尚未关断或已进入补偿模态两种情况。图4e所示为领航模块、跟随模块均进入电压补偿模态,即模态5。
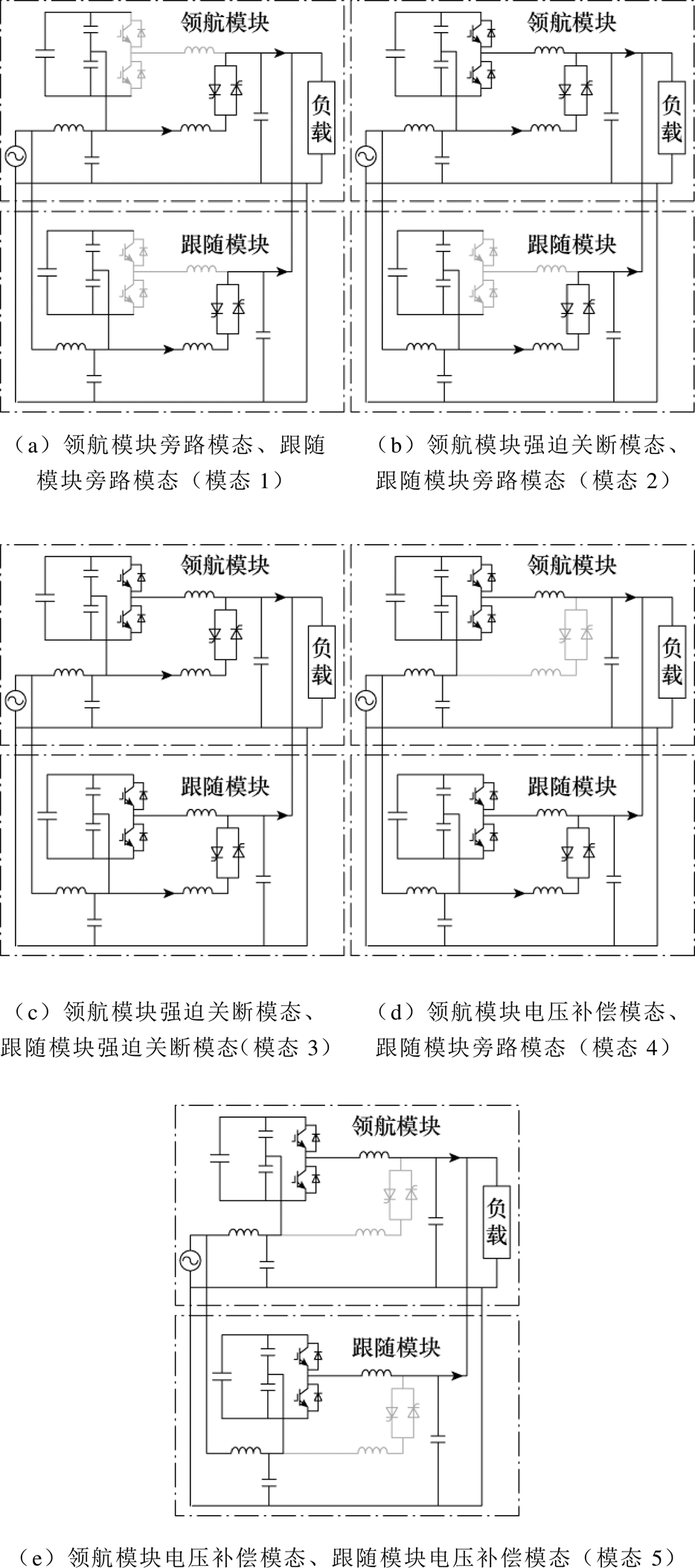
图4 DVR并联系统各运行模态
Fig.4 Operation modes of the DVR parallel system
DVR基本控制方法包括同相位补偿法[4]、完全补偿法[17]和最小能量补偿法[18]三种,为了便于设计模块化DVR并联系统控制器,本文采用同相位补偿法,设计了以一种领航模块控制为主机,跟随模块控制为从机的主从式控制方法,模块间信号通过以太网通信传输。
图5所示为模块化DVR并联系统结构及简化控制框图,以A相为例, 为电网电压。
为电网电压。 、
、 、
、 、
、 分别为领航模块直流电压、输出电流、晶闸管电流及输出电压。同样地,
分别为领航模块直流电压、输出电流、晶闸管电流及输出电压。同样地, 、
、 、
、 、
、 分别为第n个跟随模块直流电压、输出电流、晶闸管电流及输出电压,领航与跟随模块控制器均包含晶闸管强迫关断模态、电压补偿模态和旁路模态。
分别为第n个跟随模块直流电压、输出电流、晶闸管电流及输出电压,领航与跟随模块控制器均包含晶闸管强迫关断模态、电压补偿模态和旁路模态。
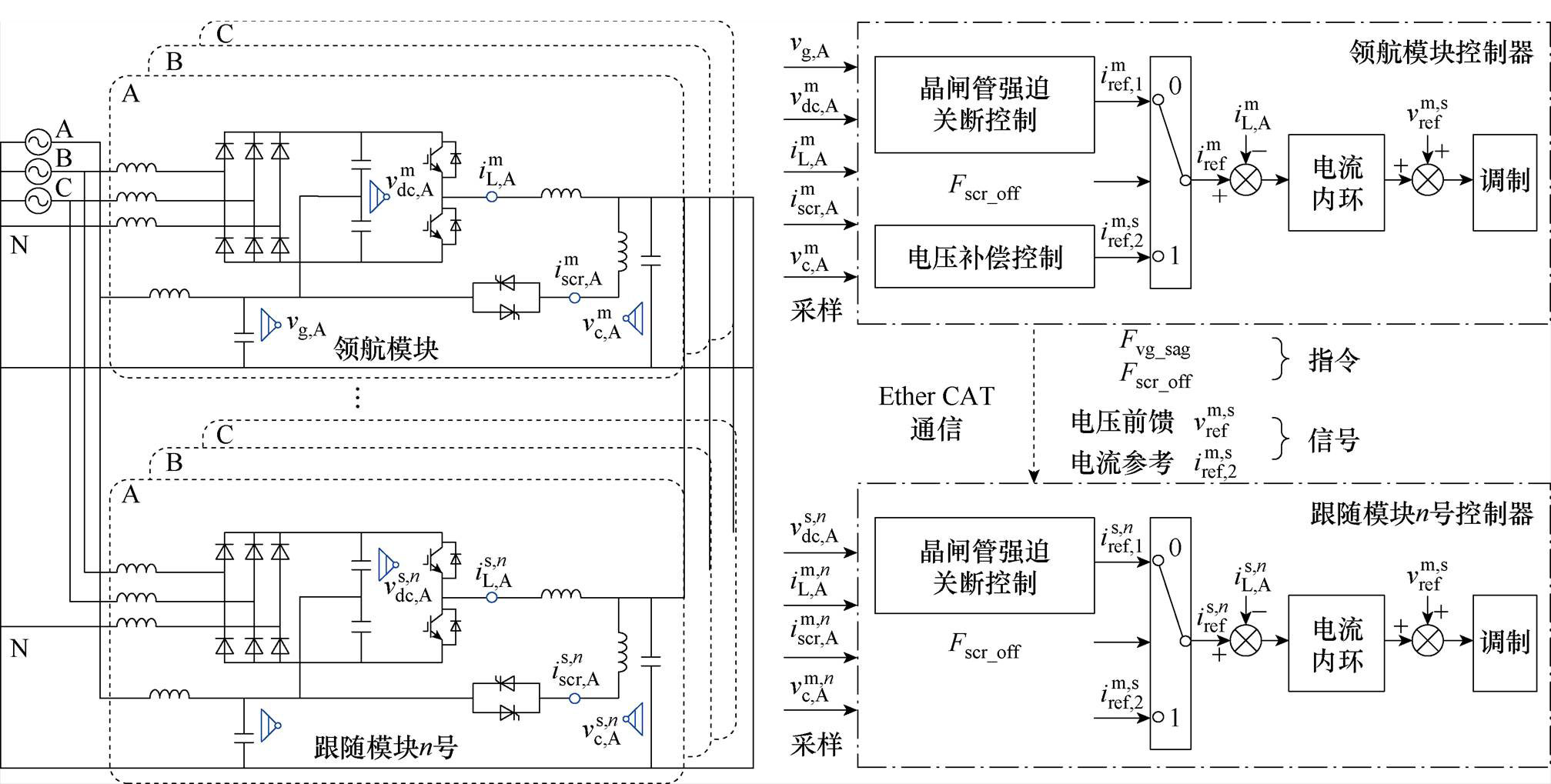
图5 模块化DVR多机并联系统结构和简化控制框图
Fig.5 Structure and simplified control diagram of the modular DVR parallel system
图6展示了所述模块化DVR并联系统多模态运行及切换流程。首先,领航模块通过锁相环监测电网电压幅值 ,若幅值小于暂降阈值Esag,则判断电网发生暂降,令暂降发生指令Fvg_sag=1,领航模块切换至晶闸管强迫关断模态,并向跟随模块下发暂降发生指令,否则保持旁路模态;其次,跟随模块接收到指令后进入晶闸管强迫关断模态,同时各模块判断晶闸管电流幅值是否小于关断阈值Ithreshold,确定SCR可靠关断,当领航模块接收到所有模块SCR均已关断的信号后,令模态切换指令Fscr_off=1,领航模块切换至电压补偿模态,并向跟随模块下发模态切换指令,跟随模块接收到指令后进入电压补偿模态;最后,在补偿过程中若电网幅值小于暂降阈值Esag,表明电网电压已经恢复,各模块重新进入旁路模态,并在电网电压过零点处,重新触发晶闸管脉冲并闭锁逆变器。
,若幅值小于暂降阈值Esag,则判断电网发生暂降,令暂降发生指令Fvg_sag=1,领航模块切换至晶闸管强迫关断模态,并向跟随模块下发暂降发生指令,否则保持旁路模态;其次,跟随模块接收到指令后进入晶闸管强迫关断模态,同时各模块判断晶闸管电流幅值是否小于关断阈值Ithreshold,确定SCR可靠关断,当领航模块接收到所有模块SCR均已关断的信号后,令模态切换指令Fscr_off=1,领航模块切换至电压补偿模态,并向跟随模块下发模态切换指令,跟随模块接收到指令后进入电压补偿模态;最后,在补偿过程中若电网幅值小于暂降阈值Esag,表明电网电压已经恢复,各模块重新进入旁路模态,并在电网电压过零点处,重新触发晶闸管脉冲并闭锁逆变器。
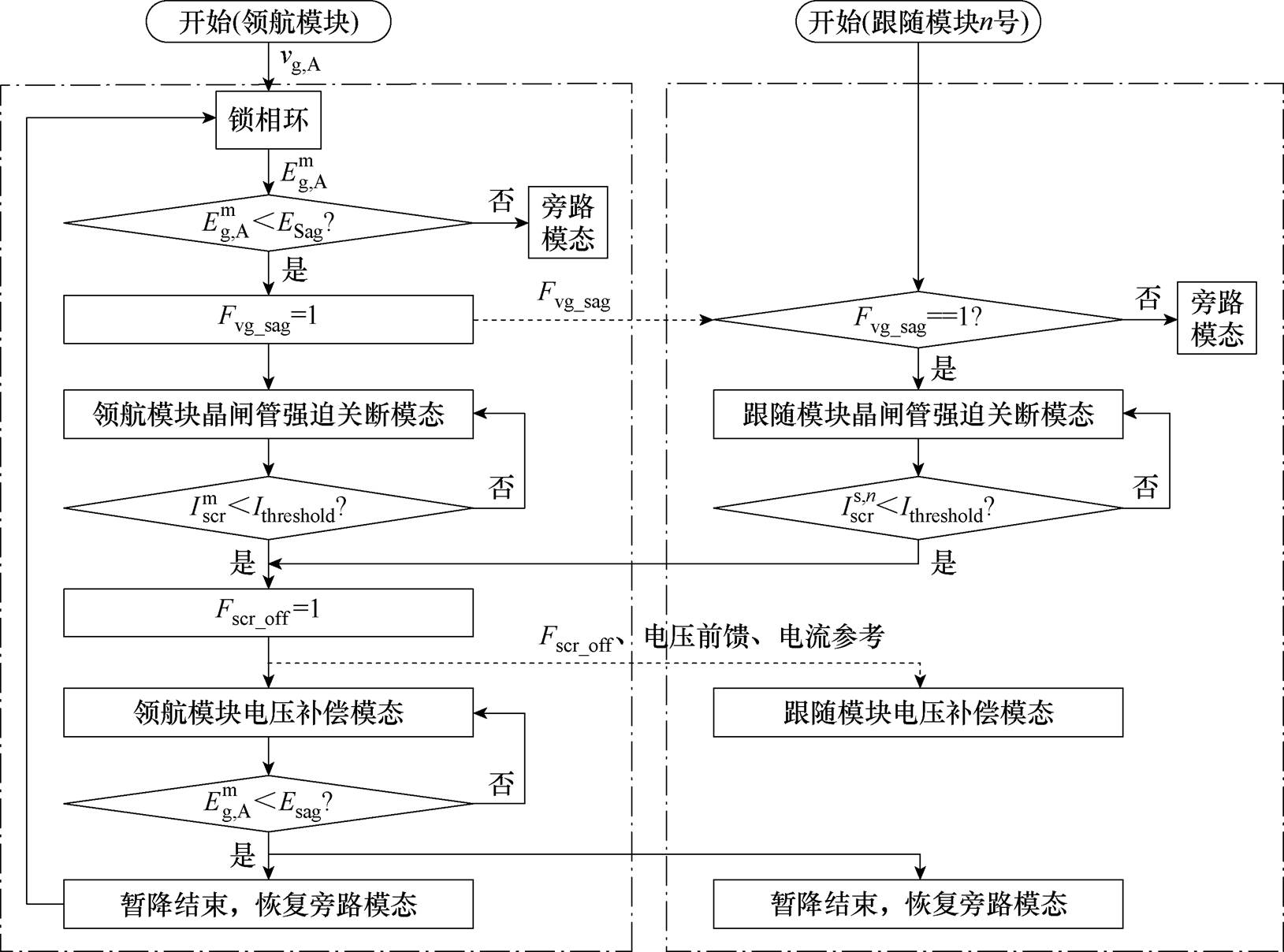
图6 模块化DVR并联系统多模态运行及切换流程
Fig.6 Flowchart of multimodal operation and switching of the modular DVR parallel system
以A相为例,图7分别阐述了领航模块、跟随模块各模态下的具体控制。
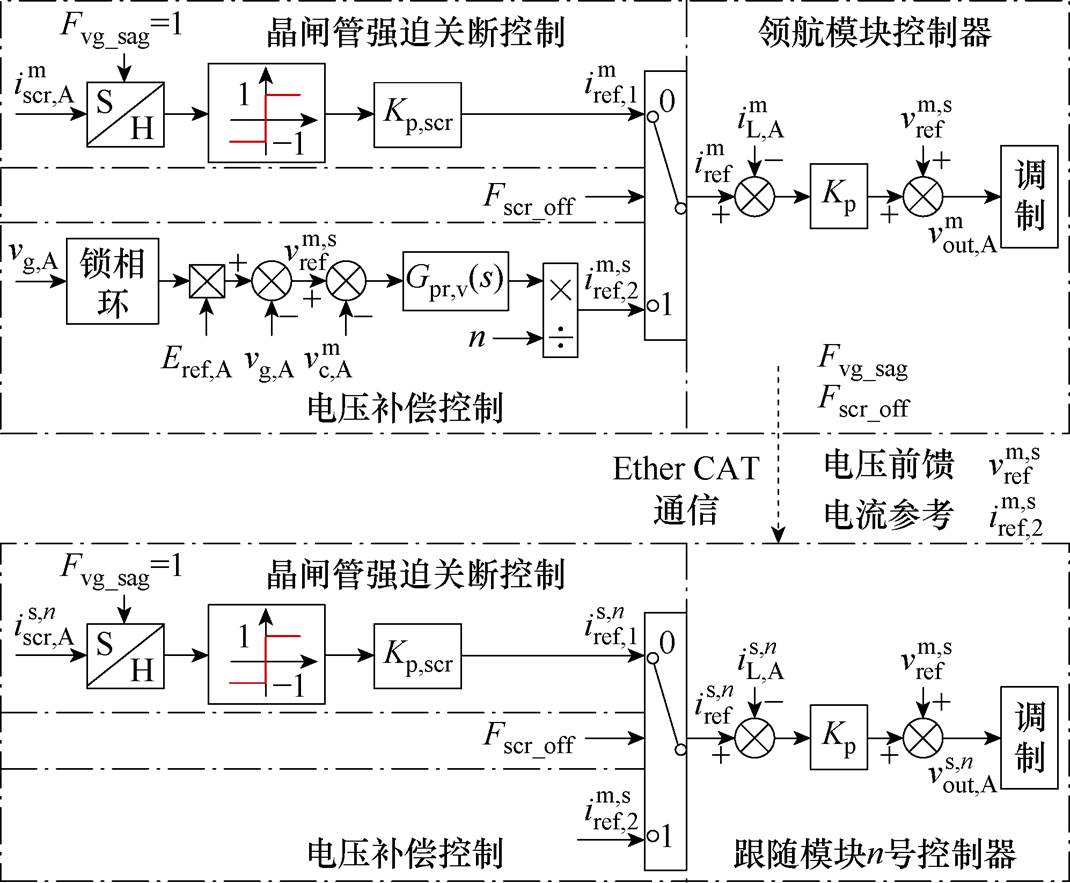
图7 领航模块、跟随模块具体控制
Fig.7 Control of the master and slave modules
2.2.1 晶闸管强迫关断模态
首先领航模块控制器通过二阶广义积分器得到A相电压vg,A的a、b轴分量为
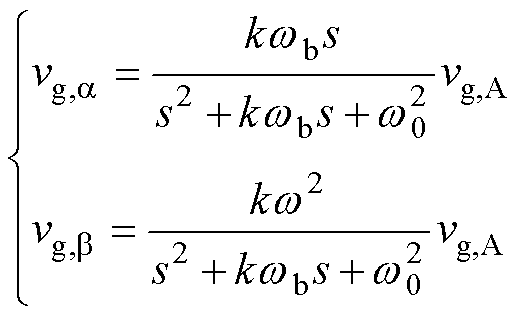 (1)
(1)
式中, 为控制带宽;
为控制带宽; 为系统基准频率。
为系统基准频率。
控制器通过锁相环得到A相相位 ,并通过坐标变换得到电网电压幅值,即
,并通过坐标变换得到电网电压幅值,即
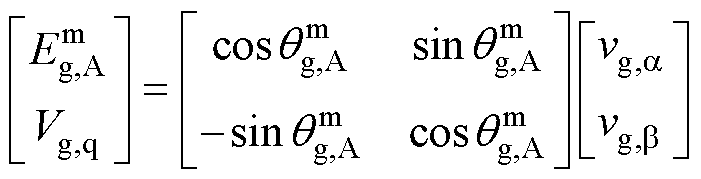 (2)
(2)
式中,为电网电压幅值;Vg,q为电压q轴分量。
通过比较电压幅值与暂降阈值Esag大小判断电网是否发生电压暂降,若发生,则闭锁晶闸管门级脉冲,切换至晶闸管强迫关断模态,并向跟随模块下发暂降发生指令Fvg_sag=1。
该模态下,当Fvg_sag=1时,通过采样保持器保持暂降发生时刻SCR电流的瞬时值,得到晶闸管强迫关断模态下的领航模块电流参考 为
为
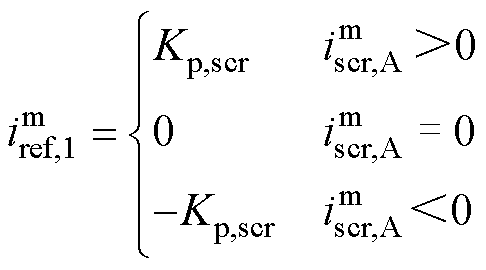 (3)
(3)
式中,Kp,scr为晶闸管电流增益倍数。通过电流内环控制执行晶闸管强迫关断,当晶闸管电流连续小于ithreshold时,领航模块晶闸管强迫换流阶段结束,等待进入动态电压补偿模态。
2.2.2 电压补偿模态
当领航模块接收到所有模块SCR均已关断的信号后,切换至电压补偿模态,并向跟随模块下发模态切换指令Fscr_off=1。
电压补偿模态下生成DVR电压参考为
 (4)
(4)
式中, 为DVR需要补偿的电压参考,并通过Ether CAT通信下发至跟随模块。经过电压控制器
为DVR需要补偿的电压参考,并通过Ether CAT通信下发至跟随模块。经过电压控制器
得到各模块电流参考。
电压控制器传递函数为
 (5)
(5)
电压补偿模态下领航模块的电流参考为
 (6)
(6)
式中,Kpr为电压环比例系数;Kr为谐振增益系数。
最后,通过电流内环和电压前馈得到领航模块的调制电压为
 (7)
(7)
式中,Kp为电流环比例系数;、 分别为晶闸管强迫关断模态、电压补偿模态下领航模块电流参考。
分别为晶闸管强迫关断模态、电压补偿模态下领航模块电流参考。
如图7下图所示,跟随模块同时接收领航模块下发的暂降发生指令Fvg_sag、模态切换指令Fscr_off、电压参考和电流参考。
当跟随模块接收到领航模块下发的暂降发生指令Fvg_sag=1时,与领航模块一致,跟随模块保持暂降发生时刻SCR电流的极性,通过式(3)得到晶闸管强迫关断模态下的跟随模块电流参考 。
。
当跟随模块接收到领航模块下发的模态切换指令Fscr_off=1时,进入电压补偿模态,将接收到的电流参考作为自身电流参考。与上述主控制器控制相似,得到跟随模块的调制电压为
 (8)
(8)
式中,、 分别为晶闸管强迫关断模块、电压补偿模态下跟随模块电流参考。
分别为晶闸管强迫关断模块、电压补偿模态下跟随模块电流参考。
本文在离散域下采用广义z变换建立数学模型,进一步分析控制器参数、通信延迟、并联台机数等对于系统稳定性的影响。
根据第2节所述的多机系统控制器,可得到如图8所示的传递函数框图,其中,T为采样周期,Gpr,v(z)为电压控制器离散域的传递函数,可表示为
 (9)
(9)
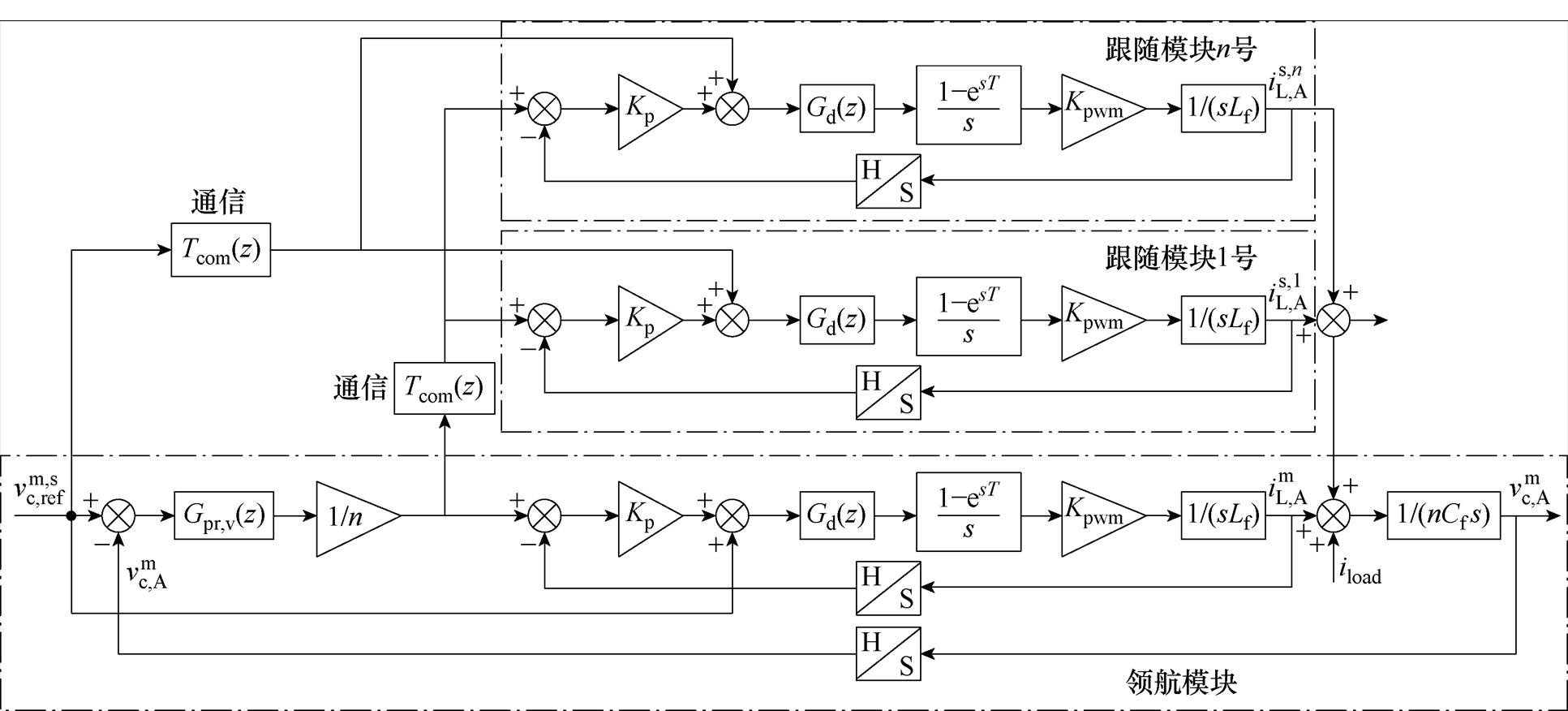
图8 电压补偿模态下DVR并联系统传递函数框图
Fig.8 Block diagram of parallel DVR grid sag compensation transfer function
式(9)中参数与2.2.2节中的电压控制器一致。Tcom(z)为Ether CAT通信带来的通信延迟,t为延迟时间常数,设m=1-t,且满足0<m<1,在离散域下可表示为
 (10)
(10)
进一步推导系统的开环传递函数可以得到
 (11)
(11)
式中,Lf、Cf为输出滤波器参数; 为广义Z变换;其余代数式表示为
为广义Z变换;其余代数式表示为
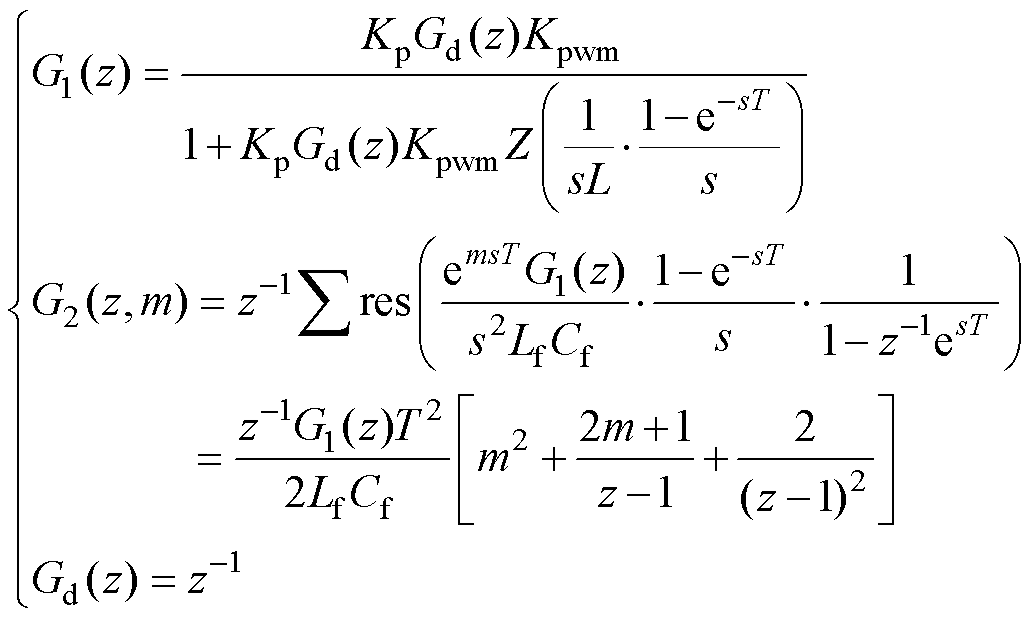 (12)
(12)
式中,Kpwm为逆变器的等效增益。
3.2.1 Ether CAT通信延迟产生原理
本文通过相对延迟较高的环形Ether CAT通信实现领航与跟随模块间的信息交互,如图9所示。假设并联机台数为n,领航模块在时钟周期1/4处将数据放至TX数组,跟随模块分别在载波波谷与波峰接收RX数组并透传给下一台跟随模块的TX数组,在波峰处装载负载调制值。其中,以太网传输速度为100 Mbit/s。
领航模块周期性地发送跟随模块电流参考(2字节),电压前馈(2字节),电网暂降状态位(2字节)和模态切换状态位(2字节),共8字节数据,通信周期为10 kHz,领航与跟随模块通信方向及交互数据见表1。
此时可计算得到单次传输时间tTn为
 (13)
(13)
根据倍福(BECKHOFF)[19]提供的硬件数据表可知:跟随模块处理数据延迟tPn≈150 ns,跟随模块转发数据延迟tFn≈130 ns,txy为x号机从转发到收到数据y次的时间,长链路通信延迟Tcom可以表示为
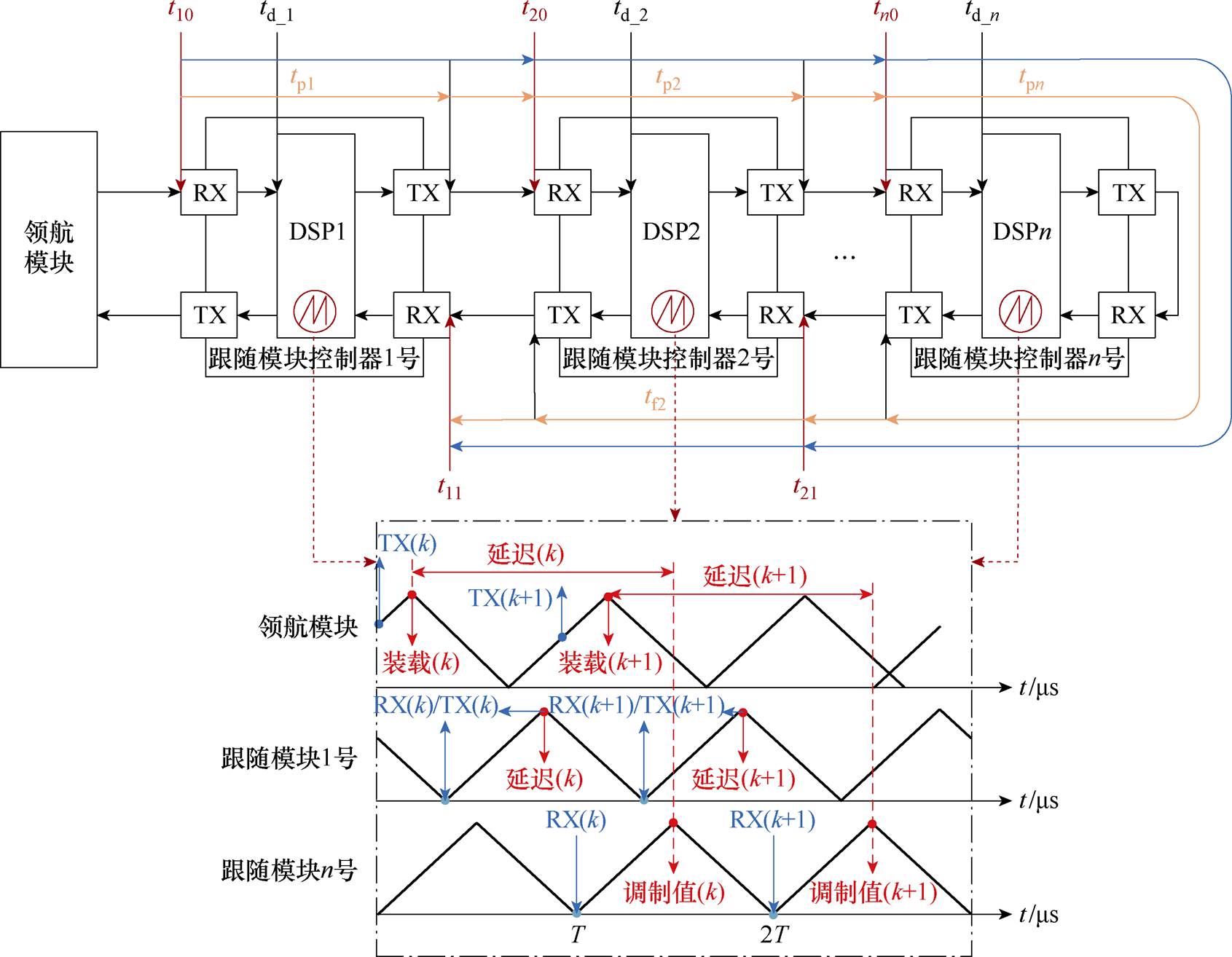
图9 领航与跟随模块通信原理以及延迟产生示意图
Fig.9 DVR master-slave communication principle and delay generation schematic
表1 通信参数
Tab.1 The communication parameter
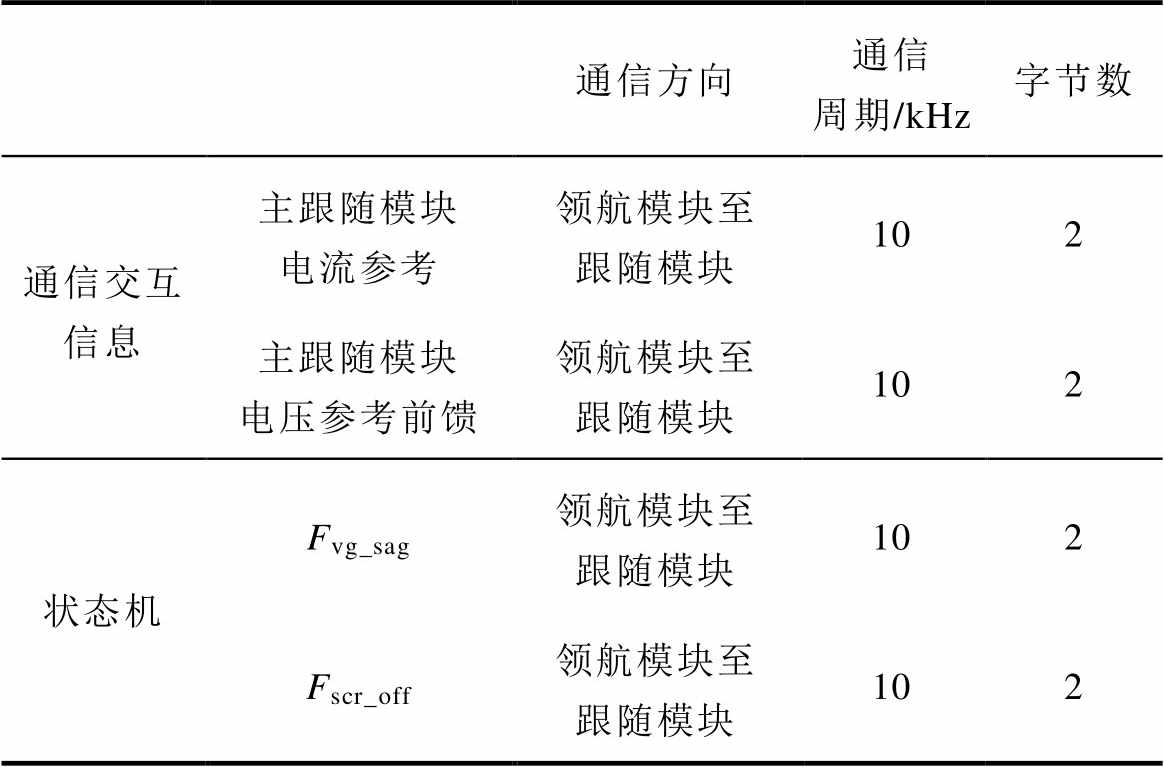
通信方向通信周期/kHz字节数 通信交互信息主跟随模块电流参考领航模块至跟随模块102 主跟随模块电压参考前馈领航模块至跟随模块102 状态机Fvg_sag领航模块至跟随模块102 Fscr_off领航模块至跟随模块102
 (14)
(14)
由图9下图可知,多机内部时钟不同及装载异步带来的通信延迟Tosc最大为
 (15)
(15)
由式(14)与式(15)可知,当采样周期T=100 ms时,可以得到如图10所示的通信延迟Td随跟随模块数量n的变化曲线,此时总延迟Td满足Td=Tcom+ Tosc<250 ms。
图10 通信延迟Td随并联模块数量n的变化曲线
Fig.10 The variation curve of communication delay Td with the number n of parallel modules
3.2.2 参数适应性分析
下面分析不同控制器参数、通信延迟以及并联模块数量下系统的稳定性。根据3.1节建立的系统数学模型,可得到四个不同工况下的根轨迹如图11~图14所示。
图11表示在Kpr=2,通信延迟Td=100 ms固定条件下,根轨迹随Kp的变化规律。将根轨迹与单位圆相交时的Kp值称为临界稳定值Kp,boundary,当Kp>Kp,boundary时,系统失稳,此外,随着并联模块数n增加,Kp,boundary逐渐减小,系统失稳风险加剧。如图12所示,在Kp=1,通信延迟Td=100 ms固定条件下,随着模块数量n逐渐增加,极点逐渐向单位圆靠近,系统逐渐失稳。
图11 系统根轨迹随电流环控制参数Kp变化的规律(Kpr=2, Td=100 ms, n=1, 2,…, 10)
Fig.11 The root trajectory of the system under the variation of current loop parameter Kp (Kpr=2, Td=100 ms, n=1, 2,…, 10)
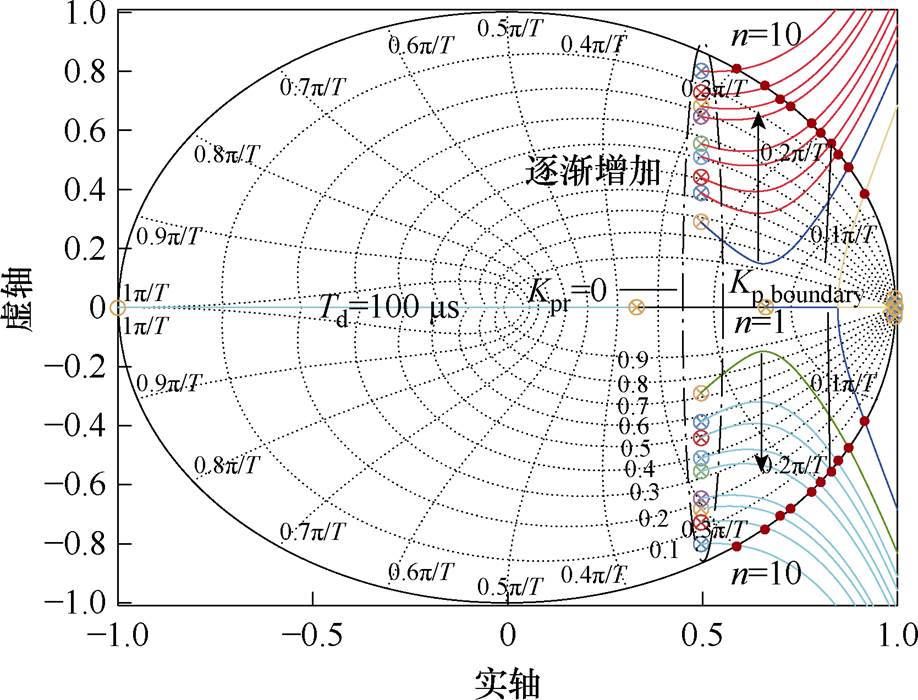
图12 系统根轨迹随电压环控制参数Kpr变化的规律(Kp=1, Td=100 ms)
Fig.12 The root trajectory of the system under the variation of voltage loop parameter Kpr (Kp=1, Td=100 ms)
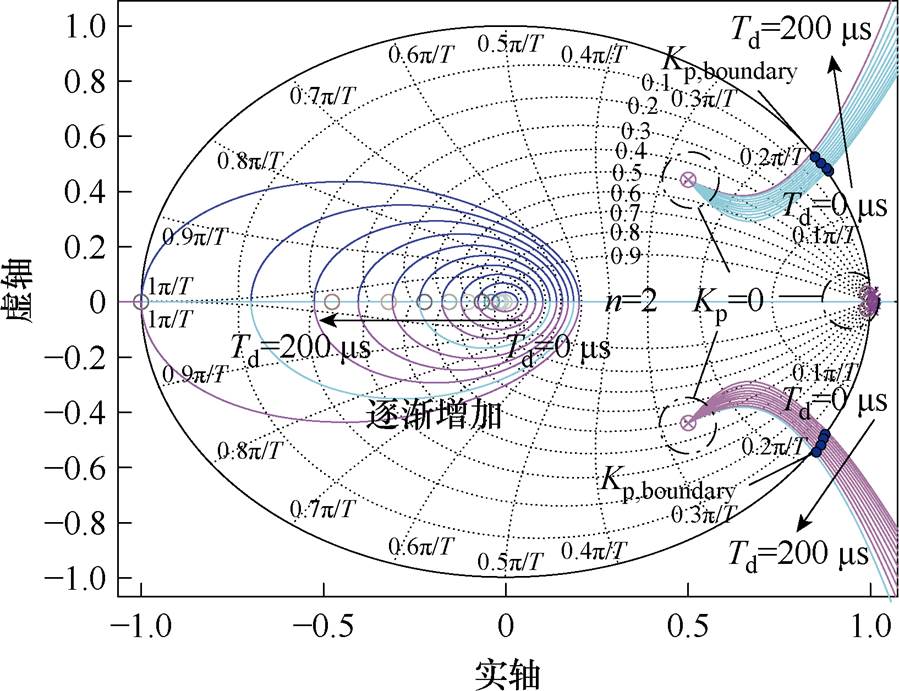
图13 系统开环根轨迹随通信延迟变化的规律(n=2, Kpr=2)
Fig.13 The root trajectory of the system under the variation of communication delay Td(n=2, Kpr=2)
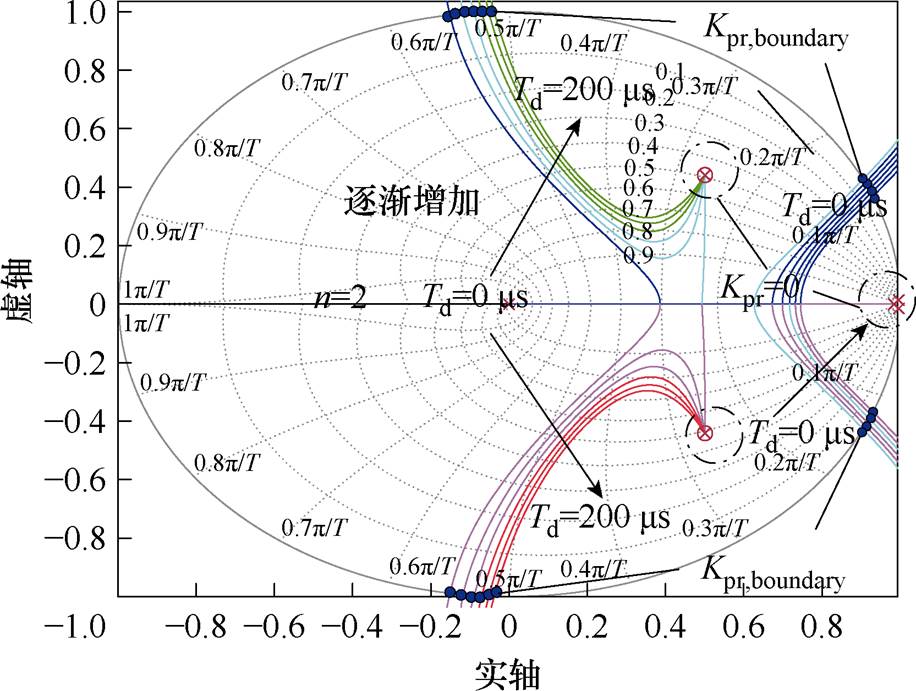
图14 系统开环根轨迹随Kpr变化的规律(n=2,Kp=1)
Fig.14 The root trajectory of the system under the variation of voltage loop parameter Kpr (n=2,Kp=1)
由图13可以看出,在Kpr=2,并联台数n=2条件下,当通信延迟Td逐渐增大,系统逐渐失稳。如图14所示,在Kp=1,并联台数n=2条件下,当通信延迟Td增大时,Kpr,boundary逐渐减小,系统失稳风险加剧。
图15描述了通信延迟Td增加时对应的电流环参数Kp变化曲线,图15a为不同电压环参数Kpr、通信延迟Td下的电流环参数临界稳定值曲线,可以看到随着Kpr、Td的增加,曲线逐渐向Kp=0靠近,其中Kpr=2对应的曲线来自于图12所示根轨迹,具体数据见图15b。可以看出,延迟时间Td增大时,Kp,boundary越小。因此,设定工况1与工况2,使其分别坐落在稳定与不稳定区域。
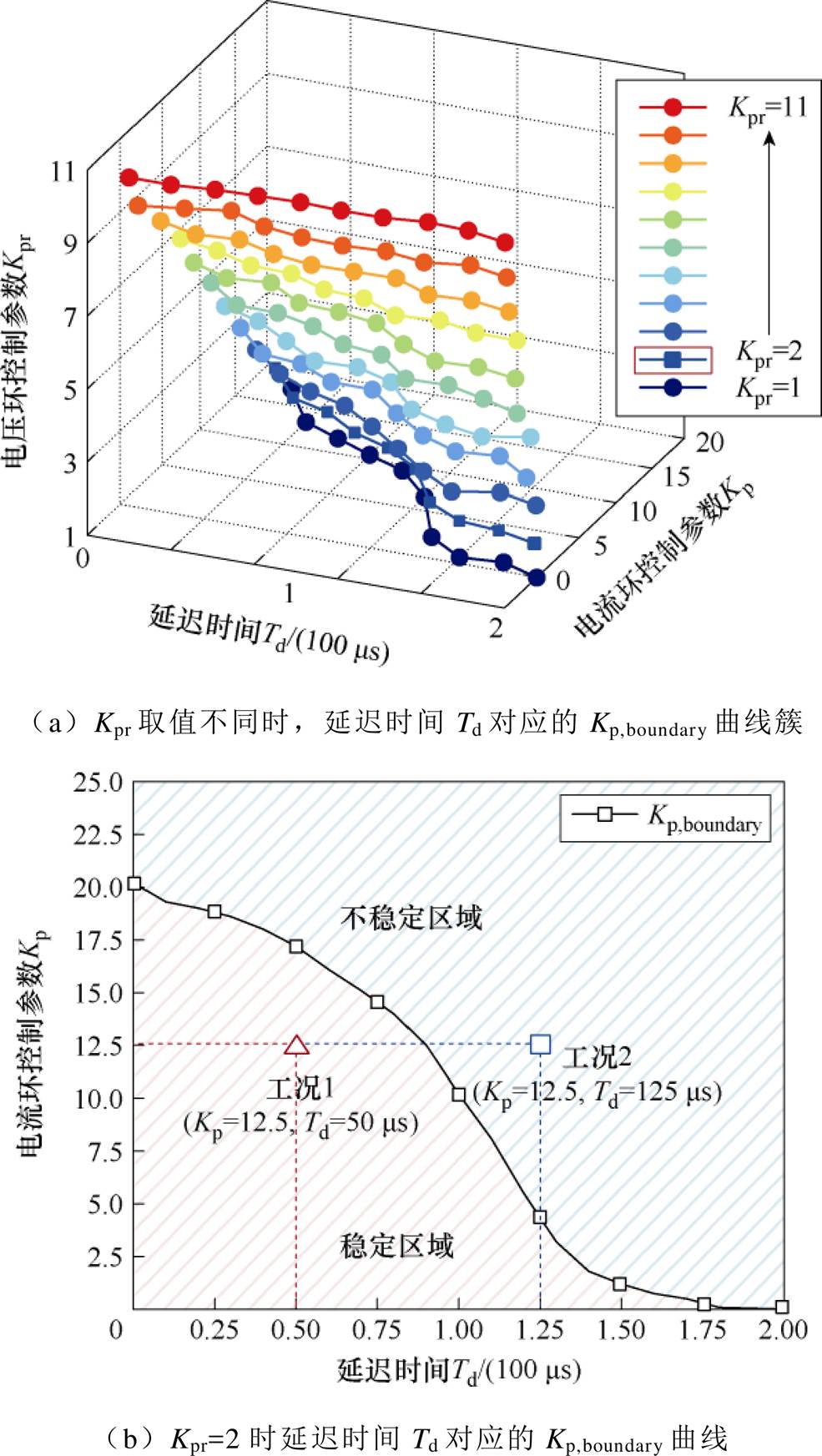
图15 临界稳定值Kp,boundary随Kpr和通信延迟Td变化曲线(并联模块数量n=2)
Fig.15 Variation curves of Kp,boundary with Kpr and communication delay Td (n=2)
图16为不同电压环参数Kpr、并联模块数量n下的电流环参数临界稳定值曲线。由图16a可以看出,随着电压环控制参数Kpr的增加,Kp,boundary越小,其中Kpr=2对应的Kp,boundary曲线如图16b所示,可以看出,当并联模块数量n增大时,Kp,boundary越小。因此,设定四组工况如图16中标注所示,使其分别坐落在稳定与不稳定区域。
为进一步验证本文所提模块化DVR多机并联系统拓扑和控制方法的可行性,本文基于RT-Lab搭建如图17所示的硬件在环实时仿真平台,其中领航模块、跟随模块控制器间采用Ether CAT通信。
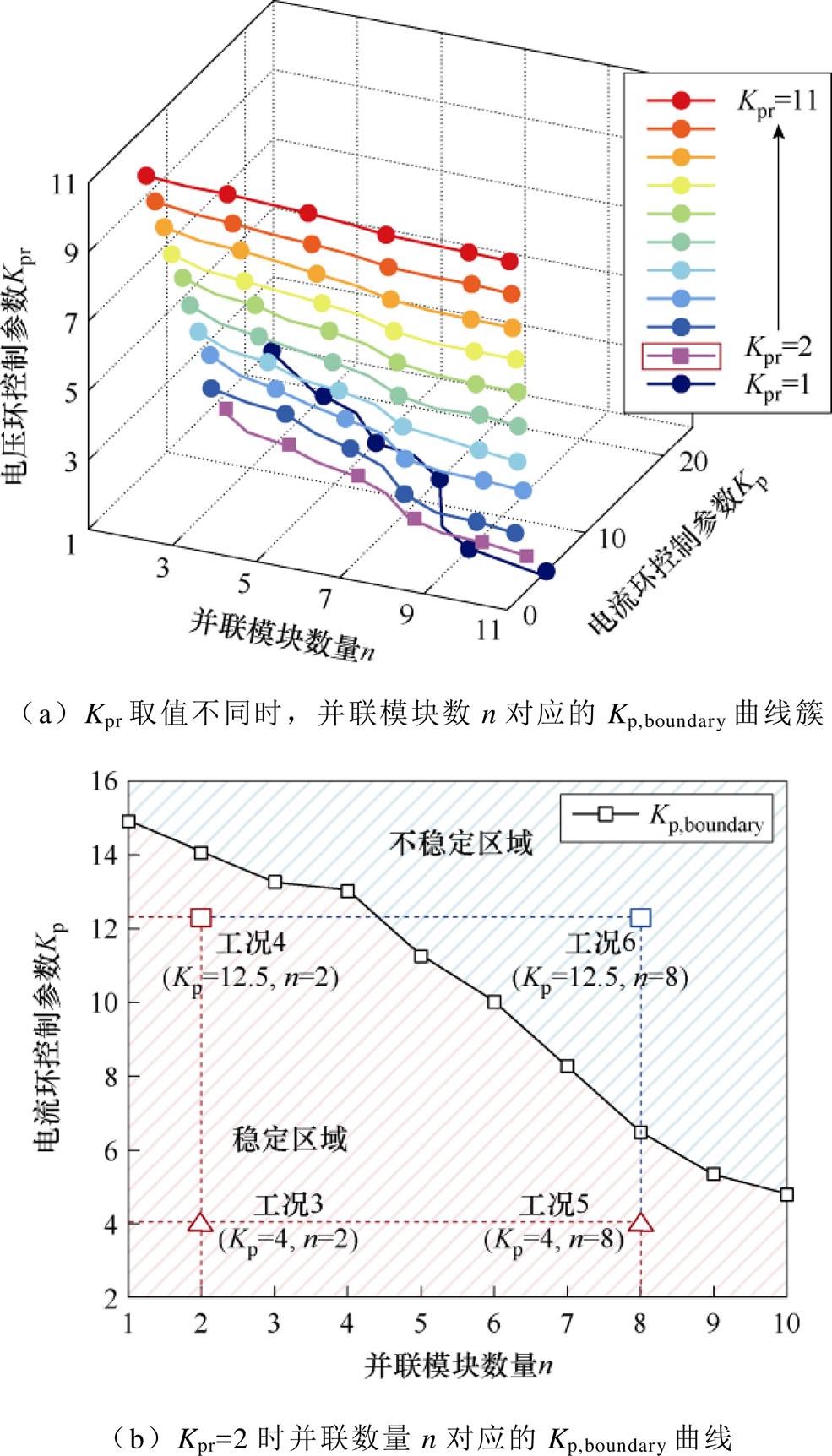
图16 临界稳定值Kp,boundary随Kpr和并联模块数量n变化曲线(通信延迟Td=100 ms)
Fig.16 Variation curves of Kp,boundary with Kpr and the number of slaves (Td=100 ms)
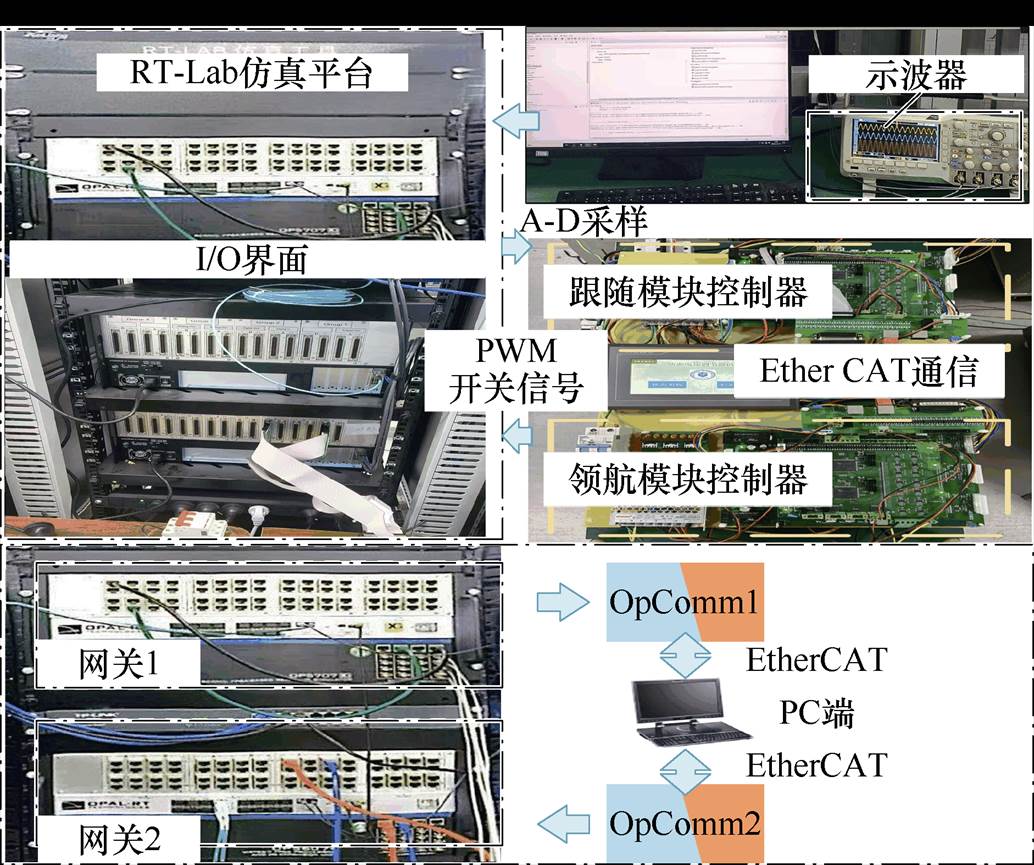
图17 模块化DVR多机并联系统硬件在环平台
Fig.17 Experimental platform of DVR parallel system
Ether CAT软件由PC端Twin CAT主站和RT-Lab从站组成。如图17下图所示,PC端在接收到RT-Lab的OpComm模块数据后,经过延迟模块发送回网关2,可用以模拟多机间通信延迟的变化。
搭建的DVR多机并联系统硬件参数见表2。
首先验证所提模块化DVR并联系统的电压补偿特性。图18为A相电网电压暂降40%时系统工况,可以看到,当电压发生暂降时,所提方法快速检测电压暂降并关断各DVR模块旁路晶闸管,关断时间仅3 ms,进入电压补偿模态后,领航与跟随模块输出电流基本一致,系统具有良好的均流特性。同时在暂降发生前后,负载电压 保持基准值不变,验证了所提DVR多机并联系统对电网电压暂降补偿的有效性。
保持基准值不变,验证了所提DVR多机并联系统对电网电压暂降补偿的有效性。
表2 模块化DVR多机并联系统参数
Tab.2 Parameter of parallel DVR system
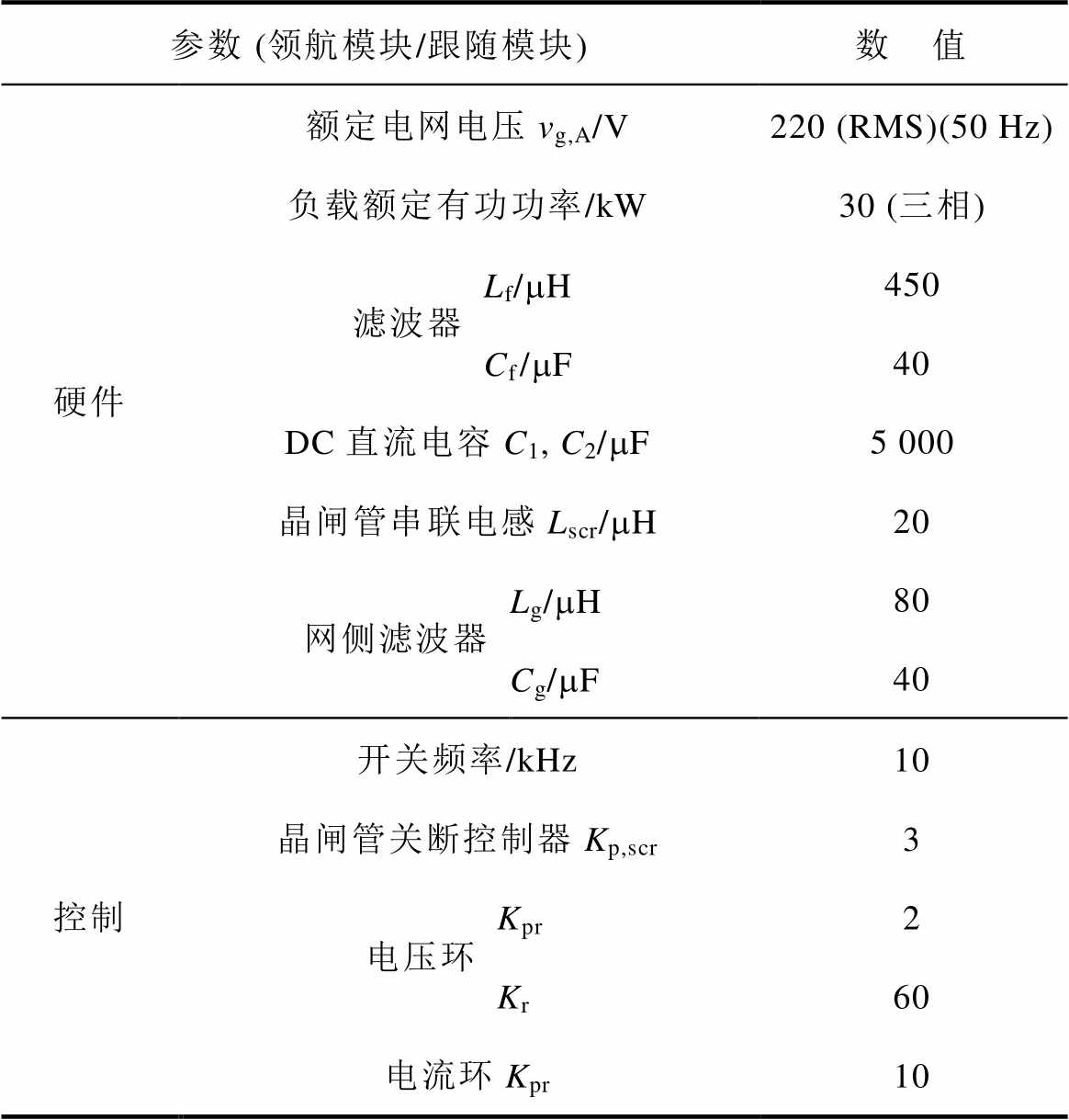
参数 (领航模块/跟随模块)数 值 硬件额定电网电压vg,A/V220 (RMS)(50 Hz) 负载额定有功功率/kW30 (三相) 滤波器Lf/mH450 Cf/mF40 DC直流电容C1, C2/mF5 000 晶闸管串联电感Lscr/mH20 网侧滤波器Lg/mH80 Cg/mF40 控制开关频率/kHz10 晶闸管关断控制器Kp,scr3 电压环Kpr2 Kr60 电流环Kpr10
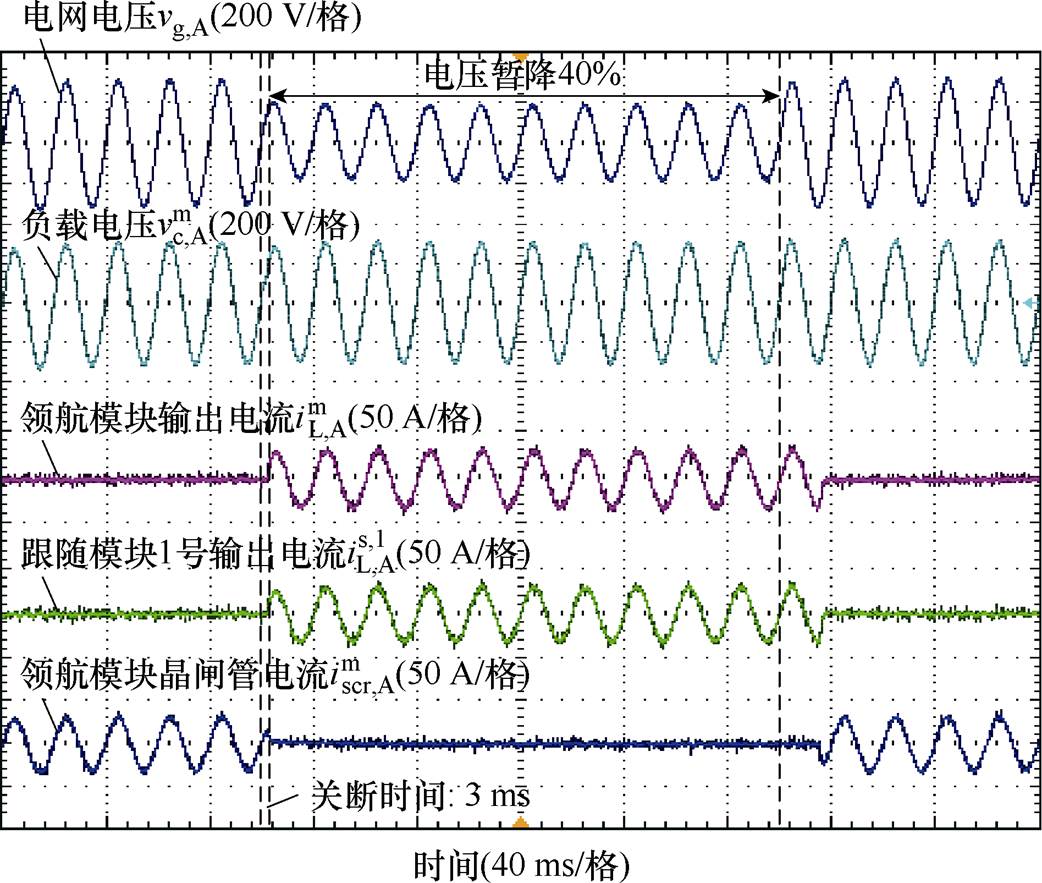
图18 DVR并联系统电压补偿波形(40%暂降)
Fig.18 The waveforms of dynamic voltage compensation by DVR parallel system (40% sag)
图19进一步展示了A相电网电压暂降100%时系统的补偿特性。与图18类似,当A相电压暂降100%时,系统通过B相和C相供电,进而快速补偿A相负载电压,同时领航模块和跟随模块电流完全均衡,说明所提DVR并联系统可在单相电压完全跌落下运行。
为了验证3.2.2节中时间延迟Td对于系统稳定性的影响,在图15b中选取了两个工况,分别为工况1和工况2,控制参数见表3,系统实验波形如图20所示。
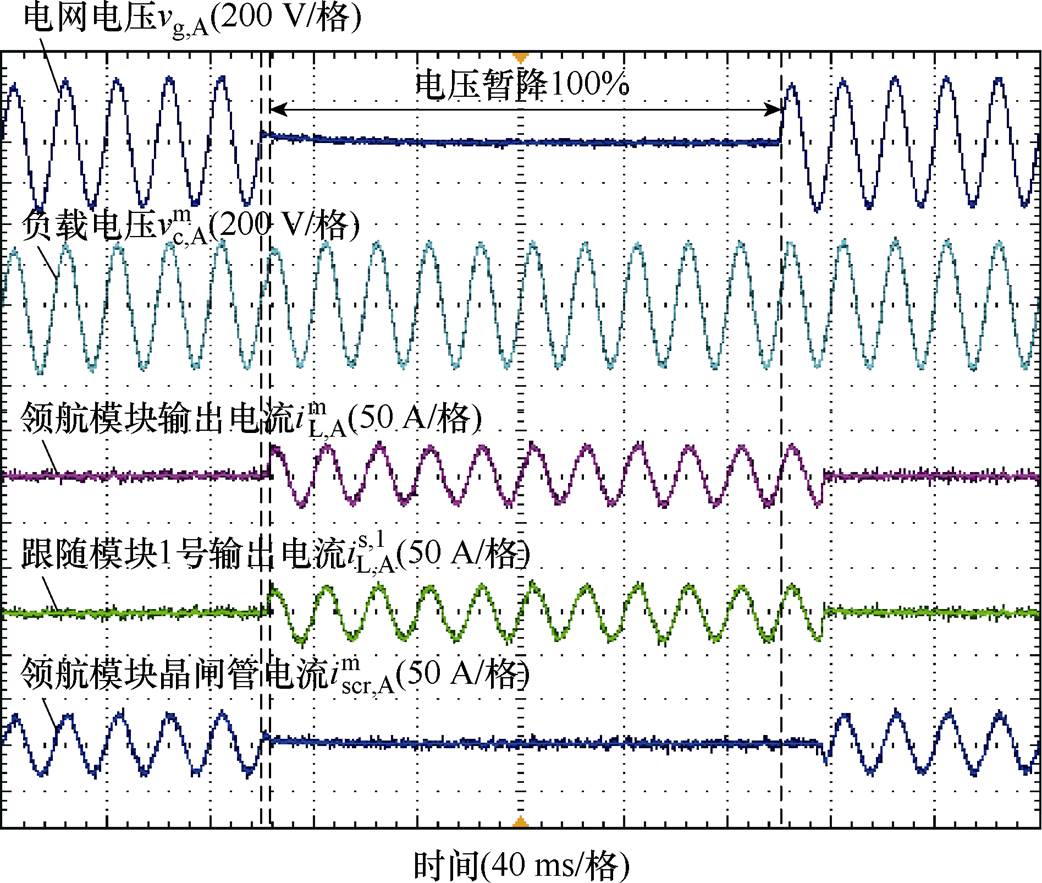
图19 DVR并联系统电压补偿波形(100%暂降)
Fig.19 The waveforms of dynamic voltage compensation by DVR parallel system (100% sag)
表3 工况1、2下系统控制参数
Tab.3 Specific control parameters for variable delay conditions
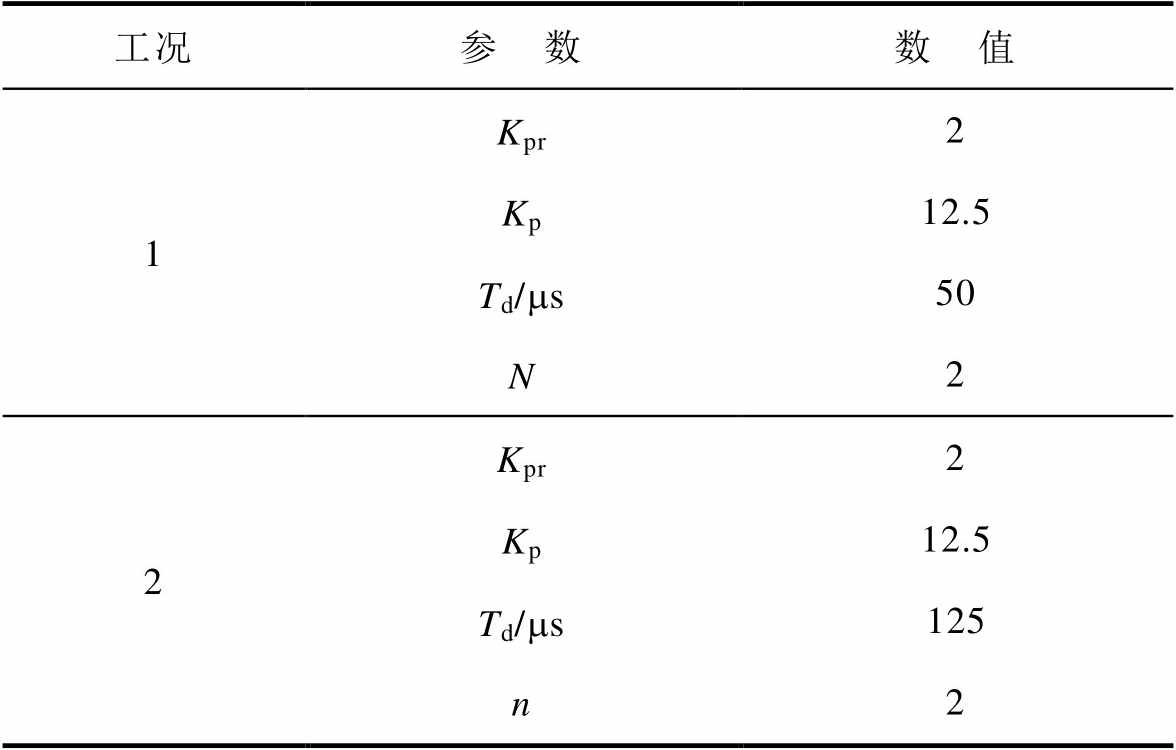
工况参 数数 值 1Kpr2 Kp12.5 Td/ms50 N2 2Kpr2 Kp12.5 Td/ms125 n2
图20为工况1、2下系统电压暂降补偿实验波形,可以看到,A相电网电压暂降40%,工况1下通信延迟为Td=50 ms,电流环控制参数Kp小于临界稳定值,各模块输出电流正弦且均衡,系统稳定运行;进入工况2后通信延迟Td增大至125 ms,此时控制参数Kp大于临界稳定值,系统逐渐失稳,同时各模块输出电流畸变且不均衡。由此可见,实验结果与图15b的稳定区域分析高度吻合。
为了进一步验证3.2.2节中并联模块数量n、电流环控制参数Kp对系统稳定性的影响,在图16b中选取了四个工况,为工况3~6,控制参数见表4,系统的仿真波形如图21所示。
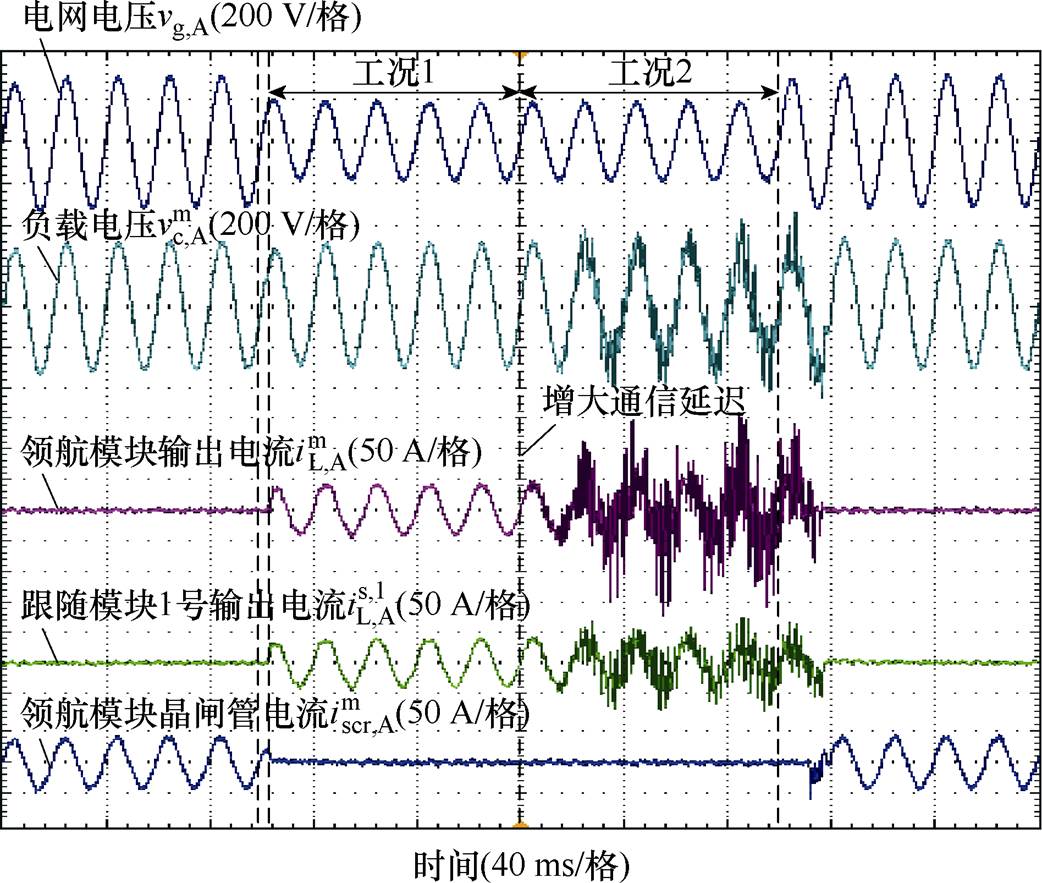
图20 DVR并联系统电压补偿波形(工况1、2)
Fig.20 The waveforms of dynamic voltage compensation by DVR parallel system (operating mode 1, 2)
表4 工况3~6下系统控制参数
Tab.4 Specific control parameters for variable parallel number of working conditions
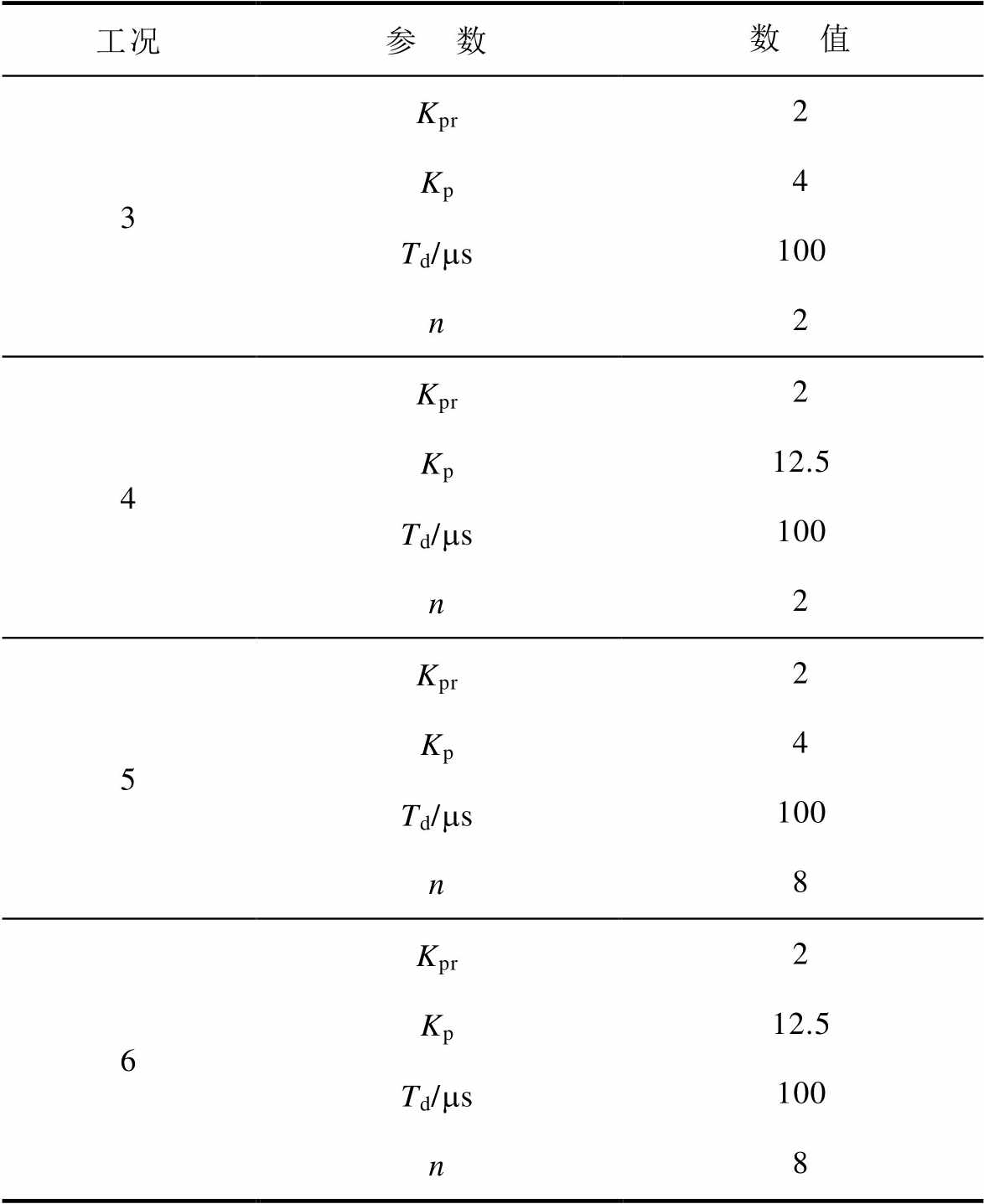
工况参 数数 值 3Kpr2 Kp4 Td/ms100 n2 4Kpr2 Kp12.5 Td/ms100 n2 5Kpr2 Kp4 Td/ms100 n8 6Kpr2 Kp12.5 Td/ms100 n8
图21a为工况3、4下系统的实验波形,该工况下并联模块数量n=2,可以看到,电流环控制参数Kp由工况3的4增大至工况4的12.5时,系统始终保持稳定,同时领航模块、跟随模块输出电流保持正弦且均衡,说明并联模块数量较小时,系统稳定裕度较大。
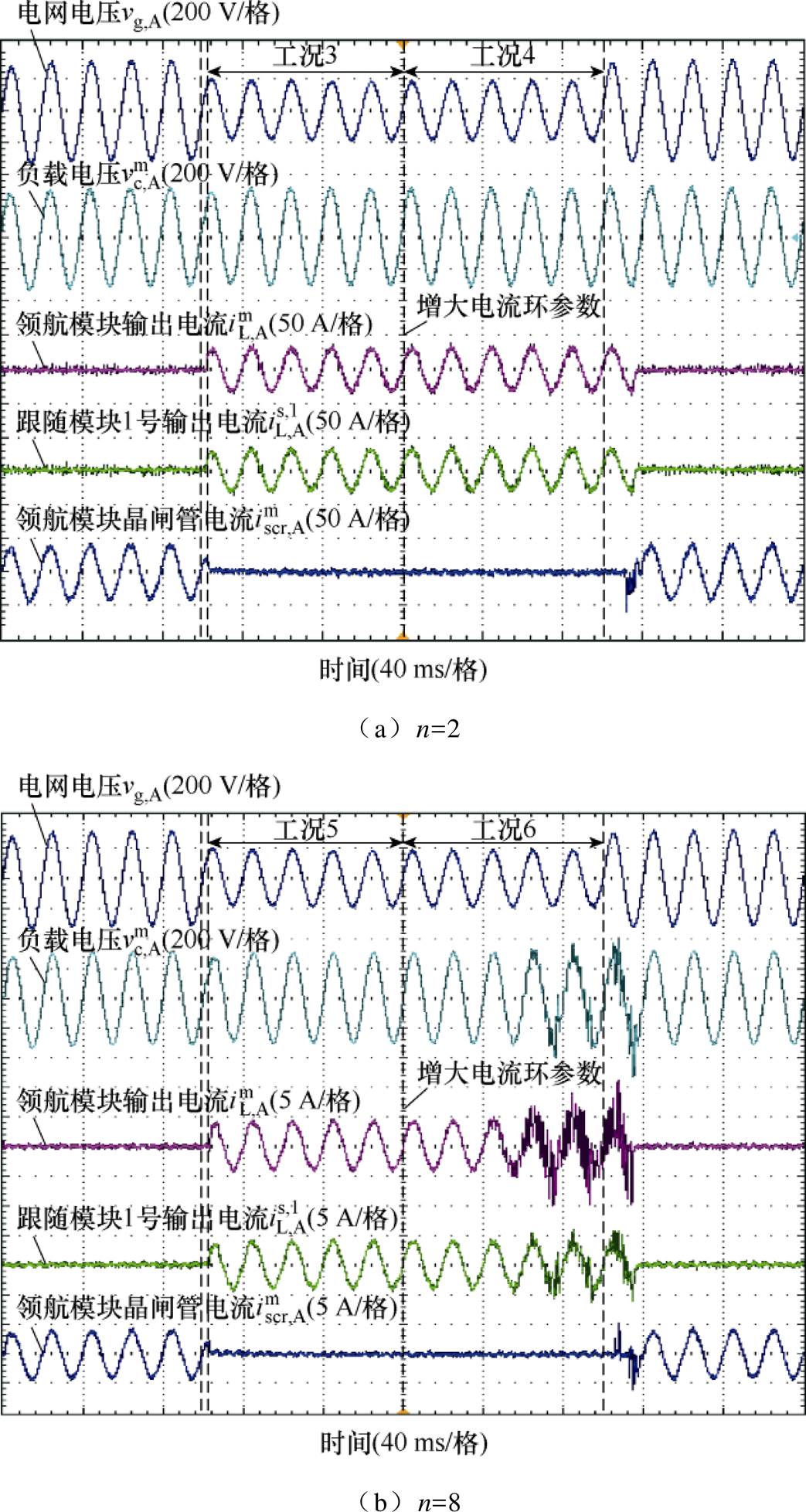
图21 DVR并联系统电压补偿波形(工况3~6)
Fig.22 The waveforms of dynamic voltage compensation by DVR parallel system (operating mode 3 to mode 6)
图21b为工况5、6下系统的实验波形,该工况下并联模块数量n=8,可以看到,工况5下,电流环控制参数Kp较小,Kp=4,系统可稳定运行;而进入工况6后控制参数Kp增大至12.5,此时已大于图16b所示的临界稳定值,系统逐渐失稳,同时各模块输出电流畸变且不均衡,验证了较多的并联模块数量下,系统电流环控制参数稳定区域更小的结论,实验结果与图16b的稳定区域分析高度吻合。
最后,本文所提的模块化无储能型DVR多机并联系统与典型DVR系统的特性总结见表5。
本文针对低压配电网多容量电压暂降补偿的需求,提出了一种无储能模块化动态电压恢复器(DVR)多机并联系统及控制方法。通过理论分析与实验验证,得出结论如下:
表5 典型DVR拓扑对比
Tab.5 The comparison of typical DVR topology
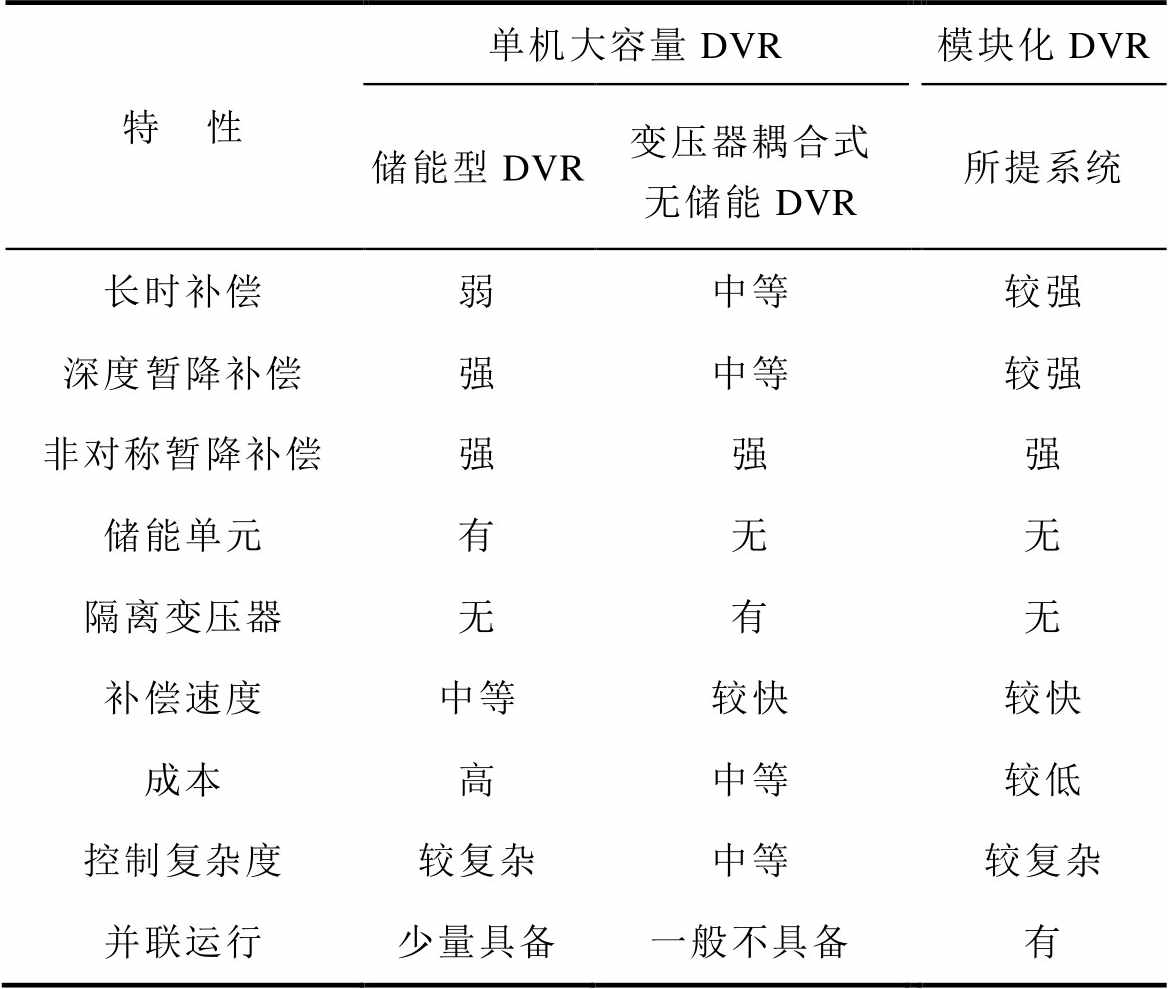
特 性单机大容量DVR模块化DVR 储能型DVR变压器耦合式无储能DVR所提系统 长时补偿弱中等较强 深度暂降补偿强中等较强 非对称暂降补偿强强强 储能单元有无无 隔离变压器无有无 补偿速度中等较快较快 成本高中等较低 控制复杂度较复杂中等较复杂 并联运行少量具备一般不具备有
1)采用三相二极管整流桥分裂拓扑结构,实现了无隔离变压器条件下的DVR模块的稳定供电,最大限度地利用了暂降期间的电网残压。
2)在电压暂降补偿期间,领航模块生成电流参考信号,并通过以太网通信发送至跟随模块,实现了补偿窗口期间内的并联DVR模块高效均流控制,从而更加灵活地应对低压配电网多容量暂降补偿的需求。
3)定量分析了并联DVR系统稳定性和通信延迟、控制器核心参数、并联台数的关系。分析和验证结果均表明,较小的电流内环参数和控制周期可提升系统稳定裕度,从而保证较多数量模块并联场景下的系统安全可靠运行,且在暂降补偿过程中电压调节仍保持较快响应速度。
参考文献
[1] 何函洋, 肖先勇, 李成鑫, 等. 敏感用户电压暂降损失风险评估的模糊推理模型[J]. 中国电机工程学报, 2020, 40(20): 6527-6536.
He Hanyang, Xiao Xianyong, Li Chengxin, et al. Fuzzy reasoning model for risk assessment of voltage sag loss for sensitive users[J]. Proceedings of the CSEE, 2020, 40(20): 6527-6536.
[2] 孟维奇, 何晋伟, 韩俊飞, 等. 非隔离型单相三桥臂统一电能质量控制器直流侧电压灵活调节与波动抑制技术[J]. 电工技术学报, 2024, 39(20): 6517- 6525.
Meng Weiqi, He Jinwei, Han Junfei, et al. DC-link voltage flexible regulation and fluctuation suppression technology of single-phase transformerless three-leg UPQC[J]. Transactions of China Electrotechnical Society, 2024, 39(20): 6517-6525.
[3] Brumsickle W E, Schneider R S, Luckjiff G A, et al. Dynamic sag correctors: cost-effective industrial power line conditioning[J]. IEEE Transactions on Industry Applications, 2001, 37(1): 212-217.
[4] 涂春鸣, 侯玉超, 郭祺, 等. 面向新能源灵活接入的多功能动态电压恢复器及其优化控制研究[J]. 电网技术, 2021, 45(9): 3487-3495.
Tu Chunming, Hou Yuchao, Guo Qi, et al. Multi- function dynamic voltage restorer and its optimal control for flexibly access of new energy sources[J]. Power System Technology, 2021, 45(9): 3487-3495.
[5] Abas N, Dilshad S, Khalid A, et al. Power quality improvement using dynamic voltage restorer[J]. IEEE Access, 2020, 8: 164325-164339.
[6] Hafezi H, Faranda R. Dynamic voltage conditioner: a new concept for smart low-voltage distribution systems[J]. IEEE Transactions on Power Electronics, 2018, 33(9): 7582-7590.
[7] 曹文远, 韩民晓, 谢文强, 等. 交直流配电网逆变器并联控制技术研究现状分析[J]. 电工技术学报, 2019, 34(20): 4226-4241.
Cao Wenyuan, Han Minxiao, Xie Wenqiang, et al. Analysis on research status of parallel inverters control technologies for AC/DC distribution net- work[J]. Transactions of China Electrotechnical Society, 2019, 34(20): 4226-4241.
[8] 王晓寰, 张纯江, 顾和荣, 等. 现场总线控制的单相逆变电源并联系统[J]. 电工技术学报, 2007, 22(10): 109-112.
Wang Xiaohuan, Zhang Chunjiang, Gu Herong, et al. Control of paralleled single phase inverters based on CAN bus[J]. Transactions of China Electrotechnical Society, 2007, 22(10): 109-112.
[9] 张敏, 陈宏舟, 樊瑞, 等. 三电平变流器模块化并联系统中点电位与零序环流机理建模与协调控制[J]. 电工技术学报, 2025, 40(5): 1-14.
Zhang Min, Chen Hongzhou, Fan Rui, et al. Modeling and coordinated control of neutral point potential and zero-sequence circulating current in modular parallel three-level converters[J]. Transactions of China Electrotechnical Society, 2025, 40(5): 1-14.
[10] 郭倩, 林燎源, 武宏彦, 等. 一种改进的分布式电源无功功率精确分配下垂控制策略[J]. 电力系统自动化, 2015, 39(15): 30-34, 74.
Guo Qian, Lin Liaoyuan, Wu Hongyan, et al. An improved droop control strategy for accurate reactive power sharing among distributed generators[J]. Automation of Electric Power Systems, 2015, 39(15): 30-34, 74.
[11] Xin Huanhai, Zhang Leiqi, Wang Zhen, et al. Control of island AC microgrids using a fully distributed approach[J]. IEEE Transactions on Smart Grid, 2015, 6(2): 943-945.
[12] He Jinwei, Li Yunwei, Guerrero J M, et al. An islanding microgrid power sharing approach using enhanced virtual impedance control scheme[J]. IEEE Transactions on Power Electronics, 2013, 28(11): 5272-5282.
[13] 张波, 颜湘武, 黄毅斌, 等. 虚拟同步机多机并联稳定控制及其惯量匹配方法[J]. 电工技术学报, 2017, 32(10): 42-52.
Zhang Bo, Yan Xiangwu, Huang Yibin, et al. Stability control and inertia matching method of multi-parallel virtual synchronous generators[J]. Transactions of China Electrotechnical Society, 2017, 32(10): 42- 52.
[14] He Jinwei, Li Yunwei, Blaabjerg F. An enhanced islanding microgrid reactive power, imbalance power, and harmonic power sharing scheme[J]. IEEE Transactions on Power Electronics, 2015, 30(6): 3389-3401.
[15] Johnson B B, Sinha M, Ainsworth N G, et al. Synthesizing virtual oscillators to control islanded inverters[J]. IEEE Transactions on Power Electronics, 2016, 31(8): 6002-6015.
[16] Abas N, Dilshad S, Khalid A, et al. Power quality improvement using dynamic voltage restorer[J]. IEEE Access, 2020, 8: 164325-164339.
[17] 施烨, 吴在军, 窦晓波, 等. 单相动态电压恢复器复合控制技术[J]. 电工技术学报, 2015, 30(17): 85-95.
Shi Ye, Wu Zaijun, Dou Xiaobo, et al. Study on compound control technology of single-phase dynamic voltage restorer[J]. Transactions of China Electrotechnical Society, 2015, 30(17): 85-95.
[18] 涂春鸣, 卢柏桦, 郭祺, 等. 基于最小能量补偿法的串联电容耦合型动态电压恢复器运行特性分析[J]. 电工技术学报, 2020, 35(17): 3727-3738.
Tu Chunming, Lu Baihua, Guo Qi, et al. Operating characteristics analysis of series capacitance coupled dynamic voltage restorer based on minimum energy compensation method[J]. Transactions of China Elec- trotechnical Society, 2020, 35(17): 3727-3738.
[19] Wen Bo, Boroyevich D, Burgos R, et al. Small-signal stability analysis of three-phase AC systems in the presence of constant power loads based on measured d-q frame impedances[J]. IEEE Transactions on Power Electronics, 2015, 30(10): 5952-5963.
Abstract As a partial-capacity compensation device, the dynamic voltage restorer (DVR) can effectively utilize the residual voltage of the power grid, making it one of the most economical choices for voltage sag mitigation currently. At present, the distribution network has differentiated demand for DVR capacity. A high compensation capacity is required at the beginning of the line, while a lower one is needed at the end. The multi-machine parallel method can effectively address the challenge of a single DVR failing to meet diverse capacity requirements. During voltage sag compensation, rapid changes in voltage amplitude make it difficult for traditional distributed parallel methods to maintain current sharing during the DVR's compensation period.
This paper proposes a modular DVR parallel system and control method without energy storage. First, the leading module quickly detects voltage sags and issues state-switching commands to the following modules. The modules can perform forced shutdown of bypass thyristors in a quasi-synchronous manner. Second, a voltage regulator is deployed in the leading module to generate a current reference, which is communicated via Ethernet to subsequent modules, enabling effective compensation for voltage sags in the modular DVR parallel system.
Furthermore, this paper establishes an equivalent circuit model of a multi-machine DVR in the discrete domain. The relationship between communication delay and the control cycle is analyzed within the Ethernet communication architecture, and the distribution of the system stability region is studied for different numbers of parallel modules, communication delays, and controller parameters. Finally, the proposed system and control method are verified under multiple operating conditions and parameter settings using the RT-Lab hardware- in-the-loop simulation platform.
The following conclusions are drawn.
(1) The split topology structure with a three-phase diode rectifier bridge realizes a stable power supply to the DVR modules under the condition of no isolation transformer, maximizing the utilization of the grid's residual voltage during sag periods.
(2) During the voltage sag compensation period, the leading module generates the current reference signal and communicates it to the following modules via Ethernet, achieving efficient current-sharing control among parallel DVR modules during the compensation window.
(3) Stability analysis and simulation indicate that smaller current inner loop parameters and control cycles can enhance the system's stability margin, ensuring safe and reliable operation of the system with a greater number of parallel modules. At the same time, a fast response speed can be maintained for voltage regulation during the sag compensation process.
keywords:Dynamic voltage restorer, voltage sag, isolation transformer-less, converter parallel system
DOI: 10.19595/j.cnki.1000-6753.tces.250747
中图分类号:TM46
智能电网国家科技重大专项(2030)资助项目(2025ZD0806000)。
收稿日期 2025-05-06
改稿日期 2025-09-26
王程锦 男,2000年生,博士研究生,研究方向为配电网电能质量控制技术、微电网电能变换技术。E-mail: chengjin_wang@tju.edu.cn
洪芦诚 男,1985年生,教授,博士生导师,研究方向为分布式储能与新能源、人工智能应用、电力电子化配电网等。E-mail: hlc3061@seu.edu.cn(通信作者)
(编辑 陈 诚)