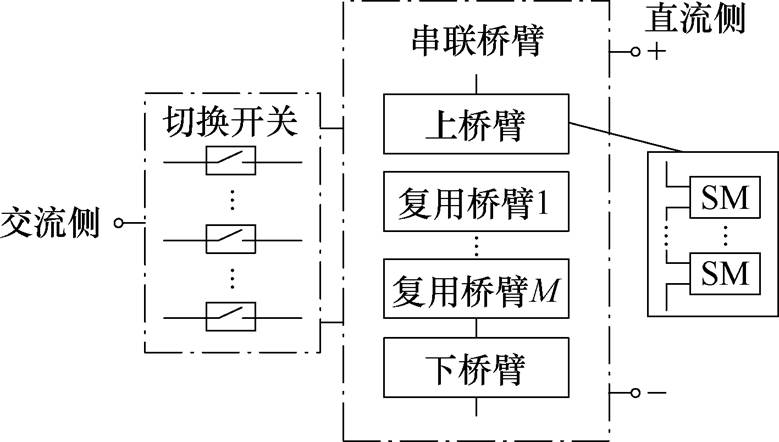
图1 AM-MMC拓扑概念
Fig.1 Topology concept of AM-MMC
摘要 结合器件串联与模块级联思想的混合型模块化多电平换流器(Hybrid MMC)降低了阀体的体积和质量,但桥臂片段化正弦波形及电流通路的切换导致其能量平衡问题非常复杂,成为制约其工程推广的关键因素。该文以轻型化性能较好的桥臂复用型模块化多电平换流器(AM-MMC)为研究对象,在深入分析其数学模型并揭示其能量平衡机理的基础上,提出一种基于环流优化的能量平衡控制策略。该策略利用环流参与能量平衡控制,其优化目标是在保证能量平衡的前提下尽可能地降低环流对系统性能的影响。通过将环流作为新的控制自由度实现桥臂能量平衡,有效地避免桥臂电压控制和谐波电流注入等方法中调压范围受限及硬件电路增加等问题。最后,基于Matlab/Simulink搭建了85 MV·A/±35 kV 33电平AM-MMC高压直流输电仿真系统,并基于实时数字控制器RTU-BOX204构建了3.2 kV·A/±150 V的七电平实验样机,对所提策略的稳态及动态性能进行了验证分析,充分证明了其有效性和优越性。
关键词:模块化多电平换流器(MMC) 轻型化设计 桥臂复用 环流优化 能量平衡控制
因模块化程度高、电能质量好、易于拓展等优点,模块化多电平换流器(Modular Multilevel Converter, MMC)已被广泛应用于柔性高压直流输电(Flexible HVDC)工程之中[1-4]。然而在高压大容量应用场景下,MMC需采用大量级联子模块和高耐压电力电子器件,导致系统成本与建设难度大幅攀升。以昆柳龙工程广东侧、广西侧受端±800 kV MMC换流站为例,采用4.5 kV/3 kA的IGBT器件,单个桥臂子模块的数量达216个(包含8%冗余)[5-6]。特别是对于海上换流站平台而言,换流阀体积与质量已成为首要考虑因素之一,与建设难度及投资成本密切相关[7-8]。以如东工程海上MMC换流站平台为例,其整体分为上、下两层,局部为七层布置,总尺寸为82.0 m×77.0 m×38.5 m,总质量高达2.3万t[9]。此外,在城市电网互联和新能源汇集等换流站数量较多的应用场景中,对换流站的占地面积、阀体体积及质量也提出了更为严格的要求。因此,MMC的轻型化设计已成为当前研究的热点问题之一。
占换流器总体积50%、质量80%以上的子模块电容被优先选定为优化目标[10],而与容值优化的技术路线相比,改进换流器拓扑结构的轻型化效果更为显著[11-13]。混合型模块化多电平换流器(Hybrid MMC)结合了两电平电压源型换流器(Voltage Source Converter, VSC)器件串联及MMC子模块级联的结构特点,通过引入器件串联开关可减少子模块用量,在有效提升换流器功率密度的同时,仍使其具备高质量波形输出的优势。
确保子模块级联构成的桥臂能量平衡是MMC稳定运行的前提。传统MMC桥臂在工频周期内可自然实现能量平衡,而Hybrid MMC桥臂通常输出片段化正弦波形,再通过器件串联开关的通断在交流侧重构组合为完整正弦波。在正弦波形合成过程中也会导致换流器内部电流通路的切换,桥臂中的非正弦电压及电流使其能量平衡机理极为复杂。而由于拓扑结构的差异,不同Hybrid MMC拓扑需结合自身工作原理及运行特性开展能量平衡控制研究。
目前轻型化拓扑实现能量平衡的技术手段主要包括桥臂电压控制和谐波电流注入控制。桥臂电压控制策略通常围绕换流器能量自然平衡的固定调制比展开,通过构建桥臂电压控制自由度与调制比之间的关系,例如控制移相角或注入谐波等方法,使换流器能够在固定调制比附近运行,调压范围较为局限。混合级联多电平变换器(Hybrid Cascaded Multilevel Converter, HCMC)[14]基于三相电压零序分量提出了非对称方波调制方法,可获得小范围电压调节能力;桥臂交替型多电平换流器(Alternate Arm multilevel Converter, AAC)[15]及半波整形MMC(Half-Wave Shaping based MMC, HWS-MMC)[16]提出移相角控制调制方法,通过控制切换开关通断时刻改变桥臂电压波形,以匹配不同电网运行条件,可获得较宽范围的电压调节能力;桥臂复用型模块化多电平换流器(Arm Multiplexing MMC, AM- MMC)[17]和并联式混合换流器(Parallel Hybrid Converter, PHC)[18]分别通过注入2次及3次谐波电压的方式使换流器获得一定的调压能力。为了在固定调制比附近均能保证能量平衡,通常需要桥臂具备负电压输出能力,带来子模块数量增加的问题,会削弱换流器轻型化程度。且即使在子模块类型及数量上进行了拓展,上述策略仍然无法保证HMMC具备较宽范围的调压能力,应对电压跌落等扰动的能力稍弱。通过注入谐波电流也可以补偿桥臂能量差值,文献[19]通过注入3次谐波电流,可以大幅拓展AAC电压调节范围。但该方法需增设电流源装备,且注入电流随着调压范围的扩大而增大,同时还存在增加器件通流能力及换流器运行损耗的问题,同样削弱了轻型化设计所带来的优势,提高了工程推广的难度。
模块化多电平换流器类拓扑相单元中普遍存在环流,该成分与子模块电容电压波动存在耦合关系。在传统MMC中,环流被完全抑制[20]或优化控制[21]以降低器件选型压力和换流器运行损耗。在Hybrid MMC类拓扑中,桥臂片段化正弦波引入的谐波电压与对应频次的环流作用后会导致能量的积累或释放,因此可将环流作为新的能量平衡控制自由度引入。因环流属于相单元固有成分,通过在调制波中叠加共模电压即可完成对环流的控制,具备易于实现且灵活度高的优势。无需像上述提及的能量平衡策略引入额外的硬件电路或限制调压范围,以保留部分环流及增加较小运行损耗的代价,可以使轻型化换流器获得相较于桥臂电压控制及谐波电流注入策略更优异的性能表现。
AM-MMC作为一种有望进行工程推广的轻型化拓扑[22],仅需引入由通态压降低、可靠性高和经济优势显著的集成门极换流晶闸管(Integrated Gate-Commutated Thyristor, IGCT)级联而成的切换开关分时投切复用桥臂,无需多数Hybrid MMC拓扑必备的直流侧大容量滤波电容及特种变压器等额外设备,且桥臂切换开关的零压切换策略有效避免了动态均压问题。目前关于AM-MMC的研究主要集中在调制策略及故障穿越技术等方面,对其能量平衡控制的研究尚不完善[23-24]。鉴于此,本文以AM-MMC为研究对象,提出了基于环流优化的能量平衡控制策略,拓展了Hybrid MMC轻型化拓扑的能量平衡控制策略研究思路。
本文首先从桥臂分时复用角度阐述AM-MMC的拓扑构成机制,详细分析其工作原理和两种基础桥臂复用调制策略。其次,基于桥臂等效调制策略,采用开关周期平均化的方法建立了相单元电压及环流的数学模型。并基于该模型深入分析等效桥臂与复用桥臂的能量平衡机理,定量揭示环流在能量平衡中的关键作用。进而提出了一种基于环流优化的能量平衡控制策略,基于换流器系统参数及运行工况,可以确定满足能量平衡的最优环流参考值,并进行控制器设计以实现最优环流的实时控制。最后,搭建了基于Matlab/Simulink的仿真系统及实验样机,验证了理论分析结果的正确性及所提控制策略的有效性。
桥臂复用型MMC(AM-MMC)通过引入切换开关实现中间桥臂的分时复用,提高了模块利用率,从而显著减少了模块数量。但桥臂复用机制导致电压、电流呈现非正弦特性,使桥臂功率成分复杂化,其能量平衡问题成为系统稳定运行的主要挑战。为此,本节首先分析AM-MMC的工作原理及调制策略,为后续环流特性分析及能量平衡机理研究提供理论基础。
基于桥臂分时复用思想的AM-MMC相单元的通用拓扑如图1所示。每个相单元由M+2个桥臂和1组桥臂切换开关组成,其中每个桥臂包含N/(M+1)个子模块(相单元恒定投入子模块数为N),每组切换开关由M+1个并联支路构成。通过切换相单元与交流侧的连接点,M个中间复用桥臂被分组并分别置于等效上、下桥臂,以确保等效桥臂中始终包含足够的子模块生成完整的正弦波形。
图1 AM-MMC拓扑概念
Fig.1 Topology concept of AM-MMC
考虑电压应力约束,当复用桥臂数量为1个或2个时,换流器能够兼顾紧凑化和经济性,本文以单复用桥臂的AM-MMC为例进行研究,后续将其简称为AM-MMC,其拓扑结构如图2所示,每个桥臂包含N/2个子模块。桥臂切换开关各支路需要承受中间桥臂输出电压,由于以工频为周期通断,考虑经济性和可靠性,采用IGCT级联构成。
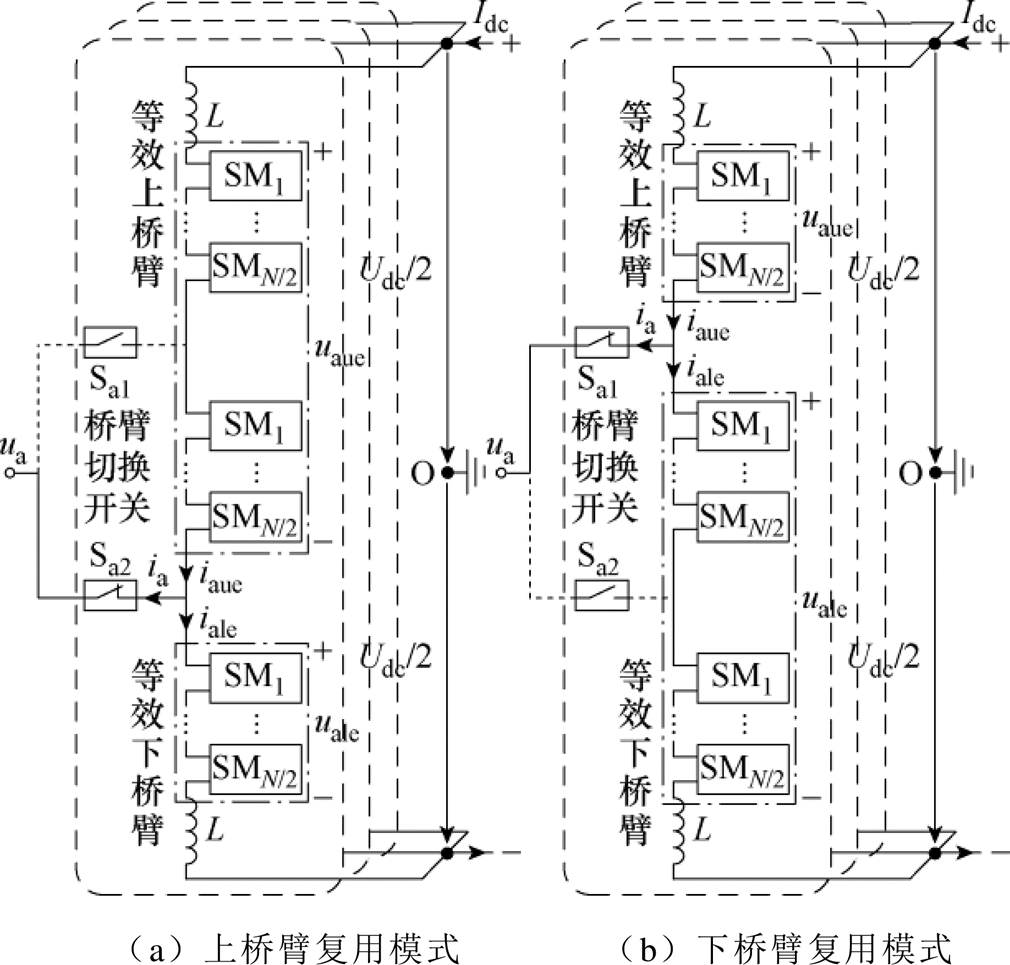
图2 AM-MMC两种工作模式
Fig.2 Two working modes of AM-MMC
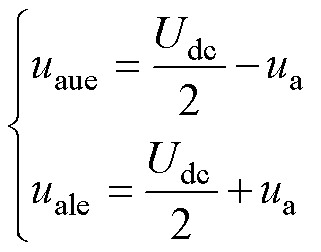
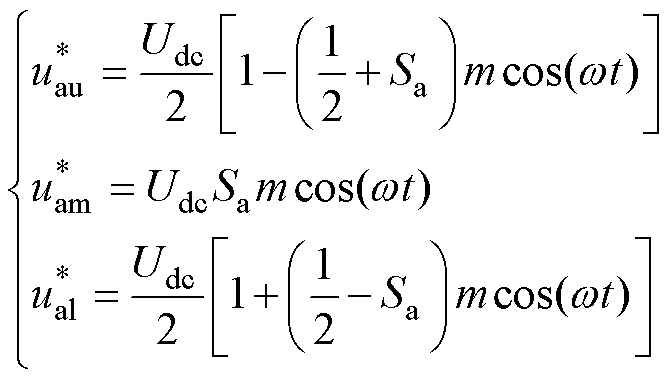
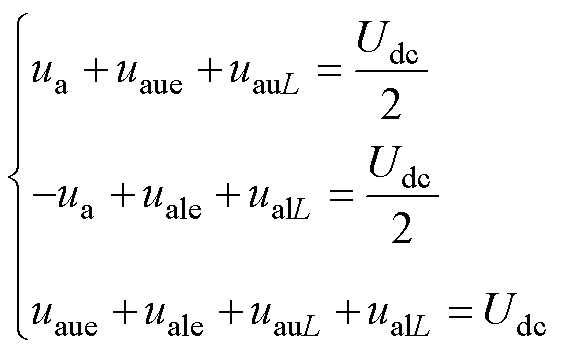
以A相单元为例进行说明,AM-MMC在一个工频周期有两种工作模式。当桥臂切换开关Sa1关断,Sa2导通时,中间桥臂与上桥臂组成等效上桥臂,共包含N个子模块,如图2a所示;当桥臂切换开关Sa1导通,Sa2关断时,中间桥臂与下桥臂组成等效下桥臂,共包含N个子模块,如图2b所示。忽略桥臂电感压降,由基尔霍夫电压定律可知,等效上桥臂输出电压uaue和等效下桥臂输出电压uale为
 (1)
(1)
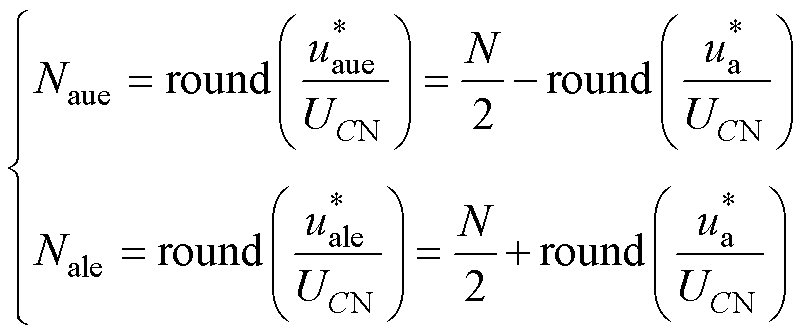
式中,ua为A相交流侧输出电压;Udc为直流侧电压。由式(1)可知,AM-MMC交流侧输出电压的调制可由控制等效上、下桥臂输出电压完成。因此,等效上桥臂投入子模块数Naue和等效下桥臂投入子模块数Nale为
 (2)
(2)
式中, 为A相参考电压;
为A相参考电压; 和
和 分别为等效上、下桥臂参考电压;UCN为子模块电容电压额定值,UCN=Udc/N。
分别为等效上、下桥臂参考电压;UCN为子模块电容电压额定值,UCN=Udc/N。
相单元工作模式切换原则如图3所示,以交流侧输出九电平阶梯波(N=8)为例。当等效上桥臂投入子模块数Naue>N/2,一定会有等效下桥臂投入子模块数Nale<N/2,相单元切换至上桥臂复用模式;当等效上桥臂投入子模块数Naue<N/2,等效下桥臂投入子模块数Nale>N/2,相单元切换至下桥臂复用模式。任意时刻,AM-MMC相单元始终在1.5N个子模块内选取N个投入,子模块利用率由传统MMC的50%提升至66.7%,减少了25%子模块用量。
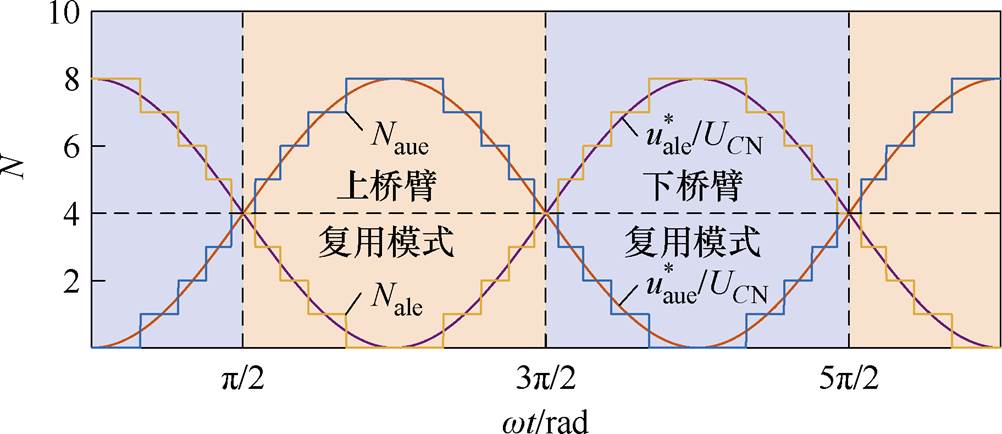
图3 AM-MMC工作模式切换原则
Fig.3 Principle of switching operating modes of AM-MMC
忽略开关谐波,设定换流器工作于逆变模式下,定义A相交流侧输出电压ua、电流ia为
 (3)
(3)
式中,Um和Im分别为相电压及相电流的幅值;w为交流电网角频率;j为系统功率因数角;m为换流器调制比,m=2Um/Udc。
当等效桥臂需要投入大于N/2的子模块,即由中间桥臂和上/下桥臂构成时,根据调制波分配方法,可分为桥臂独立调制策略和桥臂等效调制策略。从输出电压的外特性来看,两种策略与传统MMC的最近电平逼近调制策略一致,均为完整正弦波形。
1.3.1 桥臂独立调制策略
根据式(1)可将等效桥臂调制波规律地拆分、分配于三个桥臂[17],如图4a所示。定义A相复用模式开关函数Sa为
 (4)
(4)
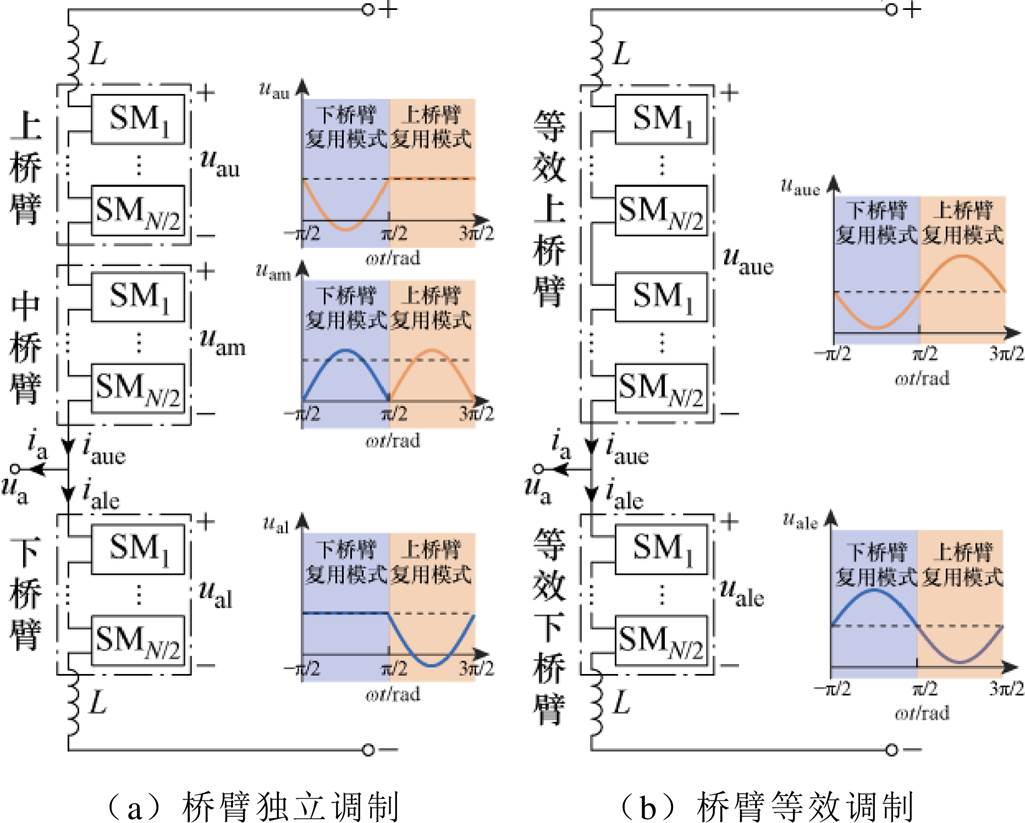
图4 AM-MMC调制策略
Fig.4 Modulation strategies of AM-MMC
上、中及下桥臂参考电压 、
、 及
及 为
为
 (5)
(5)
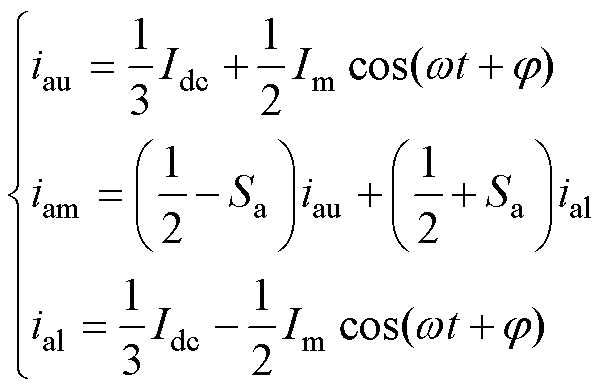
若控制桥臂电流仅包含直流及基频分量,则上、中及下桥臂电流iau、iam及ial为
 (6)
(6)
式中,Idc为AM-MMC的直流侧电流。
基于式(4)~式(6),以工频为周期,推导满足桥臂能量平衡的约束条件为
 (7)
(7)
式中,me为基于上述策略的AM-MMC自然满足能量平衡的调制比。
在无额外控制的情况下,换流器仅能稳定运行于这一固定的过调制状态,细微的能量波动都可能会导致系统失稳。且上、下桥臂需至少包含(me-1)N/2个全桥子模块以输出负电压,中间桥臂需额外增加(me-1)N/2个子模块。为获得调压能力,需要在桥臂参考电压中注入2次谐波分量,但会进一步增加桥臂级联子模块数量。此外,等效桥臂调制波的拆分方法无法完全穷尽,兼顾经济性及工作性能的优化设计工作难以完成。不同波形分配方法的能量平衡约束条件不同,当桥臂电压输出能力受损或直流侧电压异常等情况发生时,会对约束条件有新的要求,基于桥臂电压控制的能量平衡策略可能难以适用。
1.3.2 桥臂等效调制策略
桥臂等效调制策略基于式(1)以等效桥臂为整体进行调制,如图4b所示。此策略不主动控制各分桥臂输出电压,而是基于电容电压排序算法在组成等效桥臂期间被动确定,桥臂参考电压不加以限制是保证换流器宽范围调压的关键,同时不存在额外配置子模块的问题。
但与传统MMC最近电平逼近调制策略相比,由于等效桥臂可用子模块数量在一个周期内发生跃变,中间桥臂每半个工频周期切换复用状态,内特性显著地复杂化,导致桥臂电感、子模块电容值及相单元恒定投入子模块数N等参数的要求更加局限。且由于组成等效桥臂期间不对所投入子模块的桥臂归属进行控制,无法明确给出各桥臂调制波的时域表达式,难以建立准确的数学模型,能量平衡机理尚不明晰,现有研究也仅是通过参数调试使其获得了稳定运行及宽范围调压的能力[22-23]。
虽然基于桥臂等效调制策略的复用桥臂功率分析具有较高的复杂度,但由于其调制策略与环流控制均与传统MMC具有相似性,因而更易于工程实现。为深入地探究桥臂等效调制策略下复用桥臂的功率形成机制及环流影响规律,进而为环流优化控制提供理论依据,本文将对AM-MMC进行数学建模并展开能量平衡机理研究。
本节围绕AM-MMC分时复用的特性,构建计及桥臂动态耦合效应的时域解析模型,通过谐波分解与电压回路方程推导环流频谱分布规律,为深入剖析能量平衡机理以及实现优化控制提供精确的数学模型支持。基于图5所示的A相等效电路及其变量的定义,构建相应的数学模型。
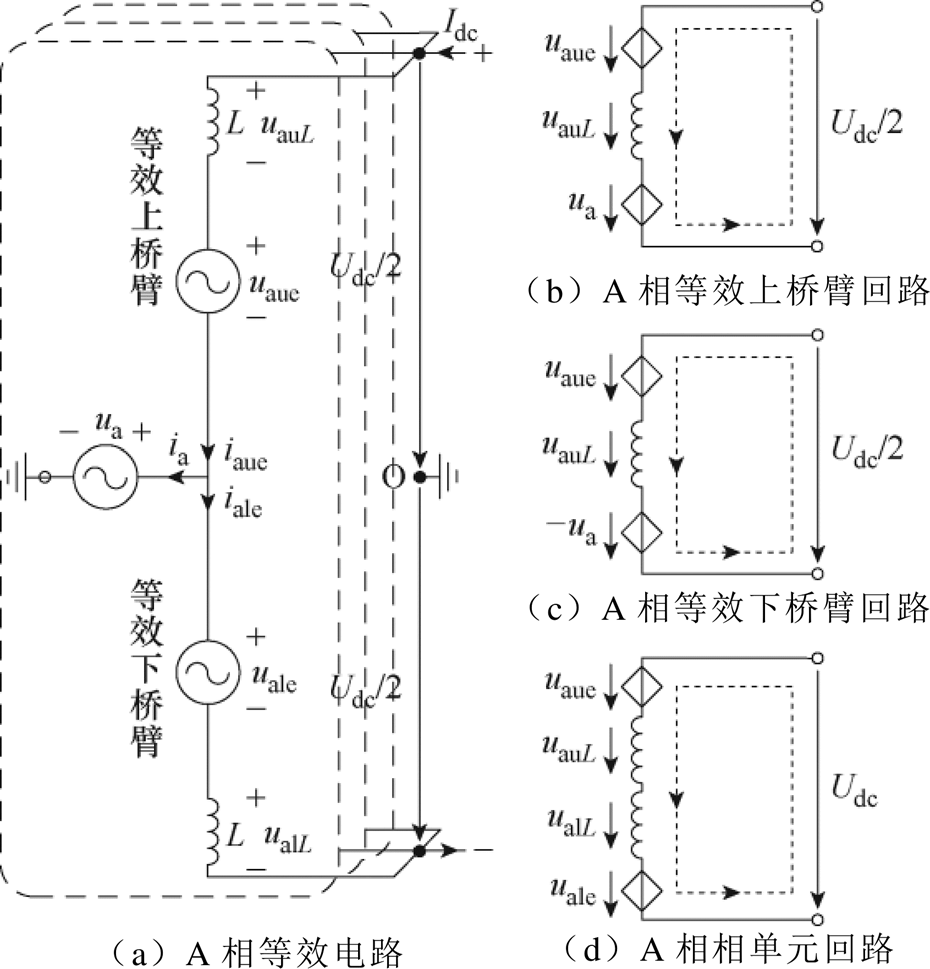
图5 AM-MMC等效电路
Fig.5 AM-MMC equivalent circuit
为实现AM-MMC环流时域解析表达的精确计算,需建立子模块电容电压与桥臂电流耦合关系的等效数学模型。假设相单元各子模块电容电压平衡,投切瞬时完成。根据式(1)、式(3),给出等效上、下桥臂输出电压的平均等效开关函数Saue、Sale为
 (8)
(8)
已知UCN=Udc/N,Saue、Sale也是等效桥臂投入子模块数量的平均等效开关函数。基于多电平调制原理,在计算子模块平均电流时需考虑桥臂内所包含子模块数量,而开关函数Saue、Sale仅反映等效桥臂投入子模块数与相单元恒定投入子模块数N的关系。等效桥臂根据工作模式的不同,会周期性地含有N/2或N个子模块。基于复用模式切换原则,等效上、下桥臂的子模块电流iCaue、iCale及电容电压uCaue、uCale的动态方程为
 (9)
(9)
式中,iaue、iale分别为等效上、下桥臂电流。
基于谐波耦合机理,推导环流谐波分量的分布特性及其与系统参数、调制比及功率因数角等参数的定量关系。AM-MMC的等效桥臂输出电压、交流侧输出电压、电流及直流侧输出电压、电流与传统MMC一致。假设等效上、下桥臂电流除直流及基频分量外,还包含所有频次的电流分量,表示为
 (10)
(10)
式中,In和 分别为桥臂电流n倍频分量的幅值和初相角。
分别为桥臂电流n倍频分量的幅值和初相角。
定义相单元环流icira为
 (11)
(11)
根据式(8)~式(11),等效上、下桥臂的电容电压uCaue、uCale中表征能量积累的量应恒为0,即
 (12)
(12)
式(9)含有表征复用模式的非线性开关函数,为明确环流特征,需进行平均化和线性化。根据AM-MMC工作原理,其等效桥臂电流以基频为工作周期,同时为了保留电流特征信息,对开关函数在工频周期取平均值为
 (13)
(13)
因此,等效上、下桥臂实际输出电压uaue、uale为
 (14)
(14)
等效上、下桥臂电感电压uauL、ualL为
 (15)
(15)
根据图5b、图5c、图5d及基尔霍夫电压定律,有如下电压关系
 (16)
(16)
根据式(8)、式(10)、式(13)~式(16),将等效上、下桥臂对应的回路电压表达式相加,可得到AM-MMC相单元电压数学模型,表示为
 (17)
(17)
其中
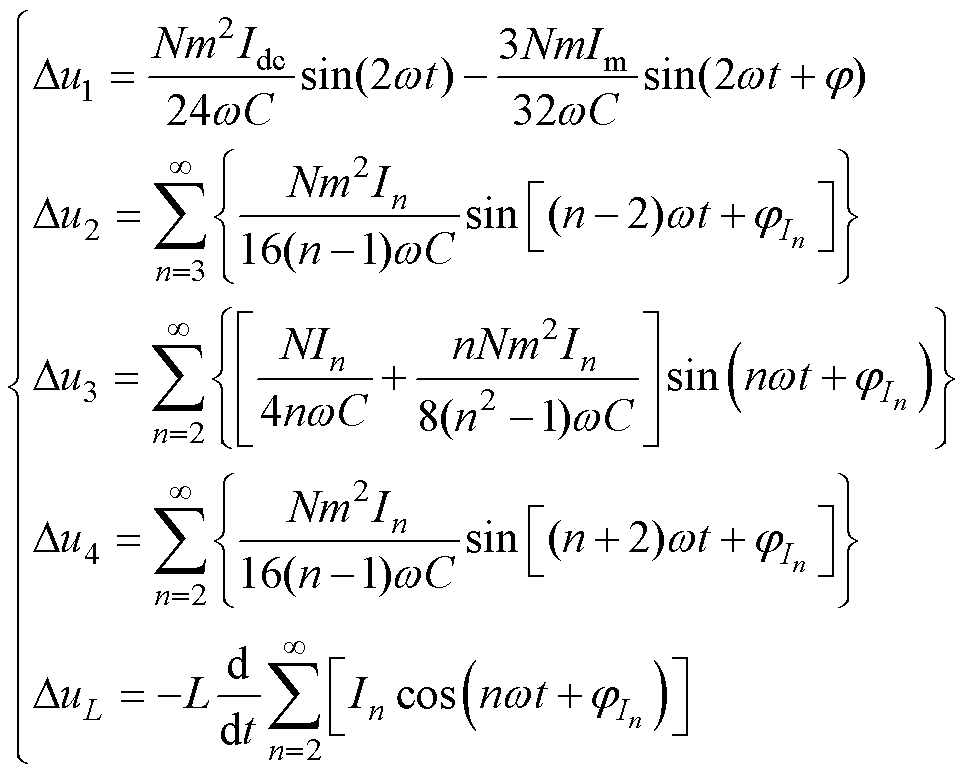 (18)
(18)
继续对Du1展开为
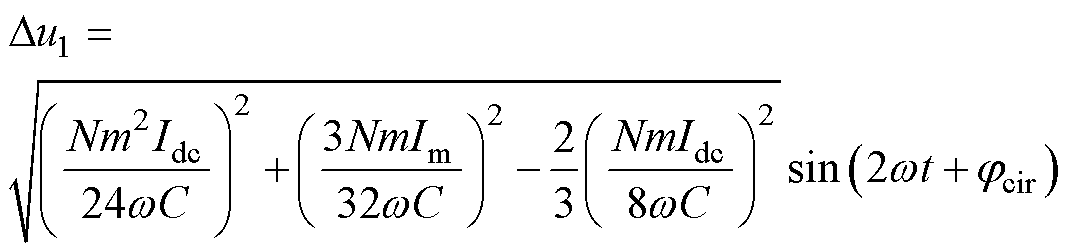 (19)
(19)
式中,jcir定义为环流的初相角,其值为
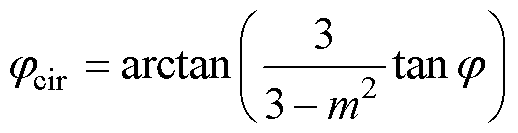 (20)
(20)
当取n=3时,式(18)中Du2存在基频波动分量,其系数是关于相单元三倍频电流分量I3的表达式,但相单元电感电压DuL不存在基频波动分量,因此可得
 (21)
(21)
同理,迭代推导出
 (22)
(22)
提取式(18)等式两侧2k倍频分量及二倍频分量
 (23)
(23)
为保证方程有解,式中关于2k倍频分量及二倍频分量的相位一定相同,即
 (24)
(24)
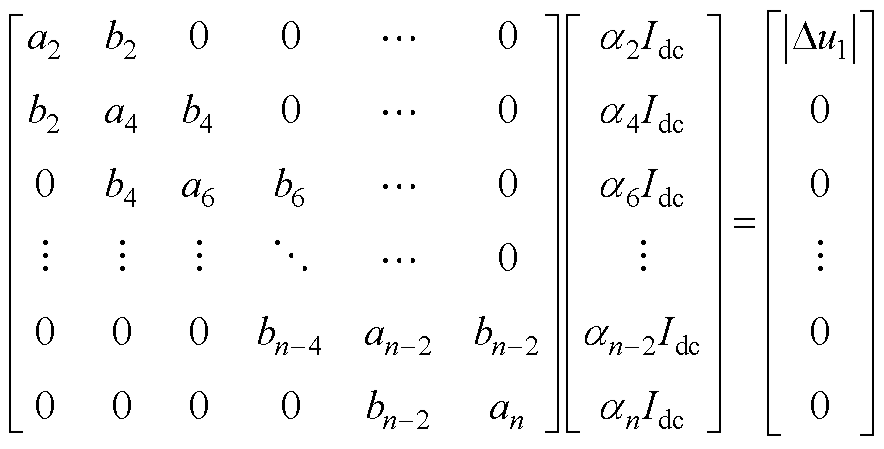
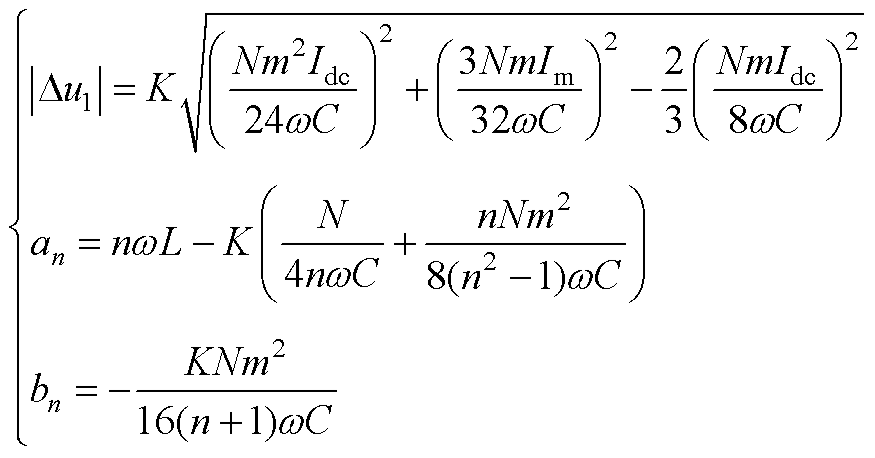
综上所述,AM-MMC相单元环流仅包含偶数倍频分量,各频次分量的初相角一致,其大小仅与系统的调制比m及系统功率因数角j有关。根据式(17)~式(24),采用待定系数法,计算环流各频次分量幅值为
 (25)
(25)
式中,an为谐波系数,an仅与系统参数有关,具体表达式见附录。桥臂电流中谐波分量与直流侧电流Idc、电容容值C、桥臂电感值L、调制比m、系统功率因数角j及相单元恒定投入子模块数N有关。
基于上述等效桥臂模型,并结合时域分解方法,本节将深入解析AM-MMC在桥臂等效调制策略下能量平衡的动态约束机制。通过建立桥臂能量-环流耦合模型,揭示环流在能量平衡中的作用机理,并定量表征环流幅相特性对能量平衡的调控规律,为后续高精度环流优化策略的设计提供理论支持。
根据式(1)、式(3)及式(10),等效上、下桥臂功率paue、pale为
 (26)
(26)
提取等效上、下桥臂功率的直流分量paue_dc和pale_dc为
 (27)
(27)
基于式(12),等效上、下桥臂功率的直流分量始终为0,paue和pale含有基频到n倍频的分量,在工频周期尺度下,不会造成能量的积累,自然完成能量平衡。从等效桥臂的角度分析,AM-MMC与传统MMC具有一致的能量平衡特点,即与环流的幅值相位无关。
选取区间wt为[-p/2, 3p/2]的单个工频周期,以A相上桥臂为例进行分析。在前半个工频周期,即wt取[-p/2, p/2]时,上桥臂独自组成等效上桥臂。此区间内,上桥臂功率pau1与等效上桥臂功率paue相等,积累的能量Eau1表示为
 (28)
(28)
因pau1含有奇数倍频分量,在半个工频周期内,Eau1一定不等于0,记中间桥臂在前半个工频周期的功率为pam1。
在后半个工频周期,即wt取[p/2, 3p/2]时,上桥臂与中间桥臂共同组成等效上桥臂,此区间内的上桥臂功率pau2取等效上桥臂功率paue与中间桥臂功率pam2的差值,积累的能量记作Eau2,即
 (29)
(29)
在一个工频周期内,上桥臂不积累能量,即
 (30)
(30)
式中,Eaue为等效上桥臂一个工频周期积累的能量。
由式(12)、式(26)及式(27),Eaue为0。因此,中间桥臂在后半个工频周期积累的能量Eam2一定为0。同理,当分析下桥臂能量平衡机理时,可推导出中间桥臂在前半个工频周期积累的能量Eam1也为0。中间桥臂每半个工频周期完成一次能量平衡,即复用时,中间桥臂不会与上、下桥臂产生能量交换。上、下桥臂能量平衡机理与等效上、下桥臂能量平衡机理一致,以工频为周期实现能量平衡,同样与环流成分无关。
基于桥臂等效调制策略,无法明确给出中间桥臂输出电压表达式,但可以基于中间桥臂电流及半个工频周期能量平衡的约束条件,推导其输出电压的成分及占比。中间桥臂阶梯波输出电压满足狄利克雷条件,即满足周期性、绝对可积及有限间断点,因此以傅里叶电压展开式替代中间桥臂电压进行能量分析是可行的。设A相中间复用桥臂的理想输出电压 包含所有频次的分量,其傅里叶展开式为
包含所有频次的分量,其傅里叶展开式为
 (31)
(31)
式中,Un和U0分别为中间桥臂电压的n倍频分量和直流分量幅值; 为中桥臂电压的n倍频分量的初相角。
为中桥臂电压的n倍频分量的初相角。
基于复用模式切换原则及开关函数式(4),给出桥臂等效调制策略下AM-MMC中间桥臂工频周期内的电流iam1、iam2为
 (32)
(32)
式中,iam1和iam2分别为中间桥臂前、后半个工频周期的电流。
中间桥臂能量平衡约束条件为
 (33)
(33)
根据式(4)、式(10)、式(12)、式(20)、式(22)、式(24)、式(25),再将式(31)和式(32)代入式(33),可得
 (34)
(34)
中间桥臂输出电压在工频尺度下经傅里叶分解后,仅包含偶数倍频分量。继续推导式(33),可得到中间桥臂能量平衡过程中具体分量为
 (35)
(35)
其中
 (36)
(36)
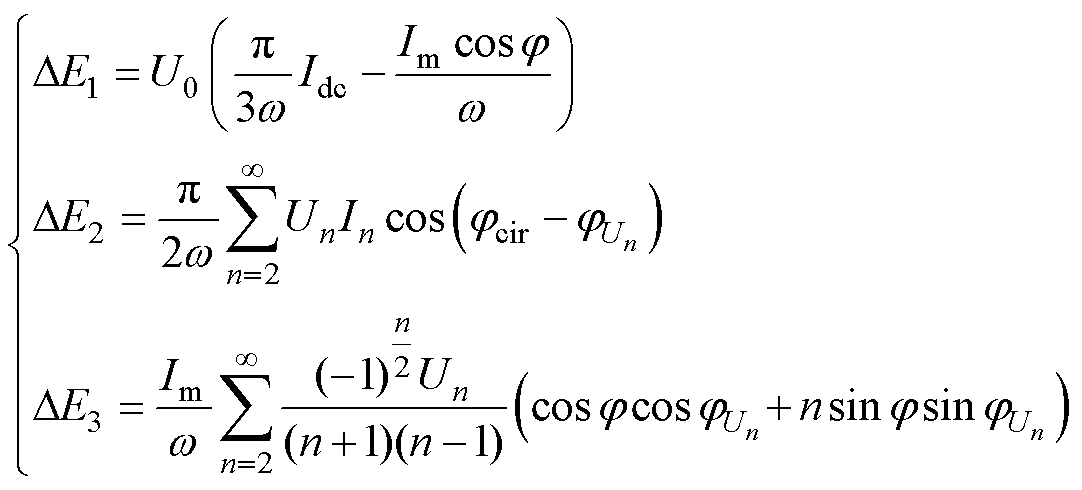
经推导后,表征中间桥臂在前、后半个工频周期能量积累量的Eam1和Eam2的表达式一致,按能量来源,将其划分为三部分。DE1表示电压直流分量与电流直流分量、基频分量作用积累的能量。DE2表示同频次但不同相位的偶数倍频电压与环流作用积累的能量。偶数倍频电压与基频电流作用产生的奇数倍频功率,这部分功率在半个工频周期积累的能量用DE3表示。易知,DE1、DE2及DE3在正常工况下均不等于0,为满足复用桥臂能量平衡约束条件,需保证三者取和得0。
因此,与传统MMC及AM-MMC上、下桥臂能量自然平衡的特点不同,AM-MMC中间桥臂因工作于分时复用模式,使得能量平衡条件变得十分复杂:①中间桥臂输出电压需要与直流侧电流、交流侧电流、系统功率因数角,及环流各频次的幅值、相位等电气量配合,使得中间桥臂在半个工频周期内不积累能量,才可以保证换流器可以正常运行;②在无任何额外控制的前提下,与能量平衡相关的中间桥臂输出电压及环流,其频次均是从二倍频到无限倍频的偶数倍频分量,这对环流控制带来了较大的难度。
本节提出基于环流优化的能量平衡控制策略,通过构建中间桥臂电压与环流的能量约束模型,引入环流作为新控制自由度实现能量平衡的动态调控;采用控制系数离线预置及在线寻优相结合的控制策略以提高策略的多工况适应能力,基于PI-PIR复合控制器,在确保系统能量平衡的同时完成最优环流控制。
式(35)中环流及中间桥臂输出电压傅里叶展开式相关项涉及无穷级数,以考虑所有项的方式进行控制不可行。根据附录表达式,AM-MMC环流主要集中在二、四倍频,因此可截断高阶项,保留主导成分进行控制。环流含量过低无法实现能量平衡,根据式(36)中DE2表达式,当中间桥臂电压傅里叶展开式各频次相位与环流相位 一致时,对应
一致时,对应 值为1,此时环流对应用以平衡过程的能量取极值,故对中间桥臂输出电压采取幅值主导谐波简化,假设
值为1,此时环流对应用以平衡过程的能量取极值,故对中间桥臂输出电压采取幅值主导谐波简化,假设
 (37)
(37)
考虑换流器功率因数多介于0.8~0.95之间,可对式(36)中DE3表达式进行优化,忽略正弦函数项及占比极小的高频项,保留二、四倍频电压分量对应能量,中间桥臂电压傅里叶展开式可简化为
 (38)
(38)
式中,引入 以平均等效开关函数描述中间桥臂电压的傅里叶展开式;b0、b2及b4分别为各频次分量的标幺值,即U0=b0Udc,U2=b2Udc,U4=b4Udc。
以平均等效开关函数描述中间桥臂电压的傅里叶展开式;b0、b2及b4分别为各频次分量的标幺值,即U0=b0Udc,U2=b2Udc,U4=b4Udc。
根据式(12)、式(25)及上述分析,可得中间桥臂能量平衡简化约束条件为
 (39)
(39)
式中,a2、a4分别为二、四倍频环流的谐波系数,即I2=a2Idc,I2=a4Idc。
对于传统MMC,对环流的幅值和相位进行控制不会对换流器的能量平衡过程产生影响,因此环流可以被完全抑制。然而对AM-MMC而言,需在满足能量平衡的前提下尽可能地降低桥臂电流的有效值及幅值,其中前者对降低器件选型压力及换流器损耗更为重要。根据式(39),有环流二、四倍频分量的幅值和相位可主动控制,为最大化环流所对应能量,将环流相位控制为0。引入环流幅值控制系数g2及g4,分别用于控制二、四倍频分量的幅值,即环流参考值 =g2I2、
=g2I2、 =g4I4。建立AM-MMC环流谐波选择控制策略的能量约束条件为
=g4I4。建立AM-MMC环流谐波选择控制策略的能量约束条件为
 (40)
(40)
根据桥臂电流时域表达式及相单元能量平衡机理,建立了环流、中间桥臂电压各频次分量以及系统参数三者之间的约束关系。考虑AM-MMC最优轻型化效果,各桥臂均包含N/2个子模块,避免由于保证能量平衡额外配置子模块,桥臂输出电压能力的约束条件为
 (41)
(41)
以单端AM-MMC HVDC仿真系统为例,基于理论及仿真结果,四倍频环流约为二倍频环流的4.6%。因此本文采取完全抑制四倍频分量,对二倍频环流分量进行优化控制的策略,即在满足式(40)及式(41)的前提下,取g4=0,并确定g2最小值。将b0、b2及b4视为未知数,式(40)能量约束关系可以通过三维曲面的形式表示。曲面上任意一点对应的中间桥臂电压仅从数学角度分析,均可以满足AM-MMC的能量约束条件,但实际运行中,还需考虑式(41)的桥臂输出电压限制。图6a、图6b分别为“无环流控制时”和“g2=0.53,g4=0,环流相位控制为0时”对应的能量平衡约束曲面及满足桥臂电压输出能力的可运行区域。
根据三维曲面表达式及三角函数取值范围的约束,通过相对简单的寻优计算即可确定AM-MMC环流优化控制系数。满足式(40)及式(41)的最优环流,在曲面上会以点的形式呈现,但考虑建模及实际运行误差,一般不以最优点为目标进行控制,如图6b所示,对应系统额定工况,二倍频环流控制系数最优约为0.53。越过最优点,代表能量平衡的曲面与桥臂输出电压能力的区域不再会有交集。这意味着在过小的环流条件下,组成等效桥臂时上/下桥臂与中间桥臂的电容电压无法平衡,或者可以描述为桥臂无法输出维持能量平衡所需的电压,从而导致系统逐渐失去稳定性。
图6 能量约束曲面及符合桥臂电压输出能力区域
Fig.6 Energy constrained surfaces and regions that satisfy arm voltage output capability
由附录式(A5)及式(A6)可知,系统调制比及功率因数的变动会直接影响谐波系数,进而需要调整控制系数以适应新的能量平衡约束,图7所示为考虑2%裕度下最优二倍频环流幅值控制系数图像(对应工况:P=0~1.0(pu)、Q=0~0.3(pu)及m=0.816),代表最优二倍频环流与固有二倍频环流的比例关系,这一非线性特征也表明仅通过参数调整无法实现AM-MMC的环流优化控制。
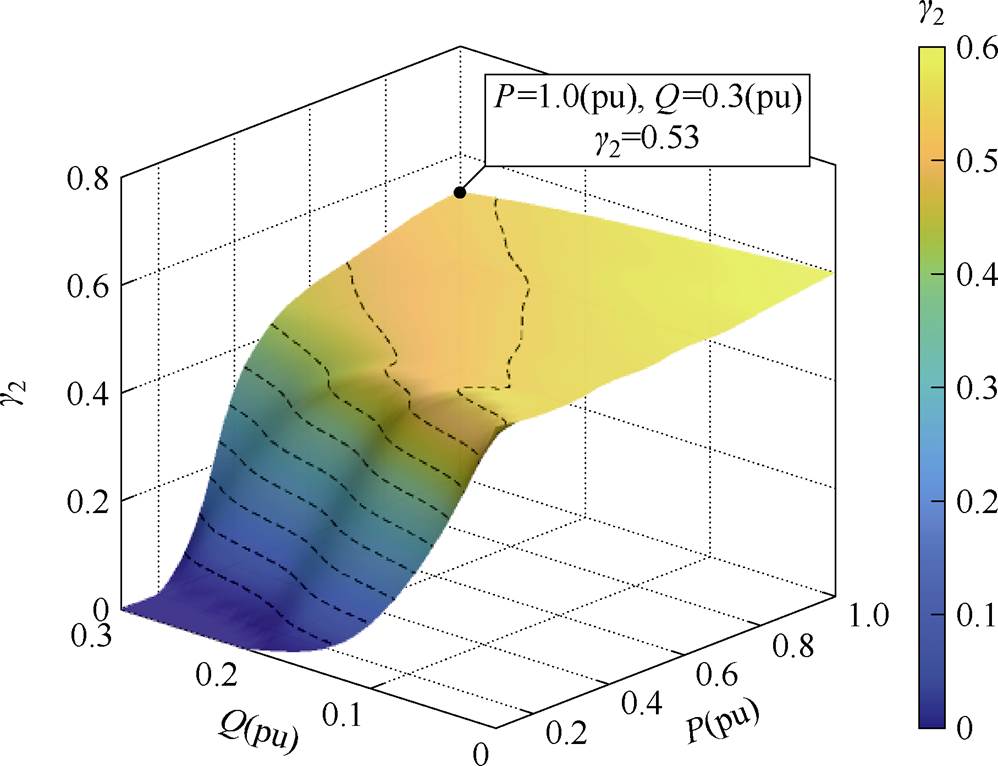
图7 二倍频环流幅值控制系数最优值
Fig.7 The optimal value of the amplitude control coefficient for the second harmonic circulating current
为提高策略在不同运行模式下的适应性,重新分析式(40),若以g2a2及g4a4为整体进行控制,即环流参考值=g2a2Idc、=g4a4Idc,在桥臂输出电压能力约束条件确定及完全抑制四倍频环流的情况下,g2a2的最优值仅与调制比m有关。即当调制比不变时,维持桥臂能量平衡的最优二倍频环流与直流侧电流呈固定比例关系,当系统传输有功功率改变导致直流侧电流变化时,仅需将二倍频环流进行等比例调整即可实现新功率条件下的最优环流控制,这将显著提升策略适应不同运行模式的能力,考虑2%裕度下的g2a2理论最优值-m曲线如图8所示,g2a2的符号仅代表实际被控二倍频环流的相位情况。
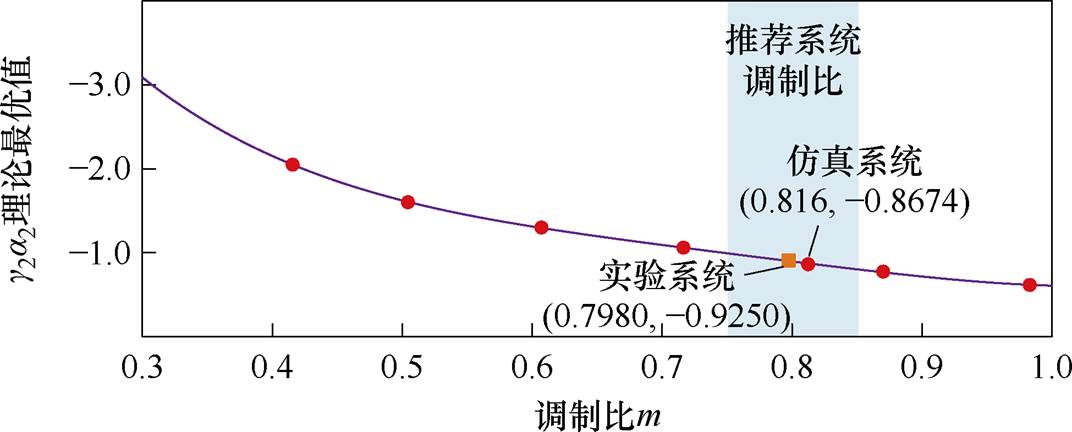
图8 g2a2理论最优值-m曲线
Fig.8 Theoretical optimal value of g2a2-m curve
由图8可知,g2a2理论最优值的绝对值随系统调制比升高而降低,因二倍频环流幅值还与直流侧电流呈正相关,交直流侧实际电压等级需要结合器件耐压及传输功率等因素进行综合设计。基于第5节单端AM-MMC HVDC仿真系统,以表1额定工况为基准,在传输功率不变的前提下,在固定一侧电压的基础上改变另一侧电压以调整系统调制比,所得最优二倍频环流幅值结果如图9所示。
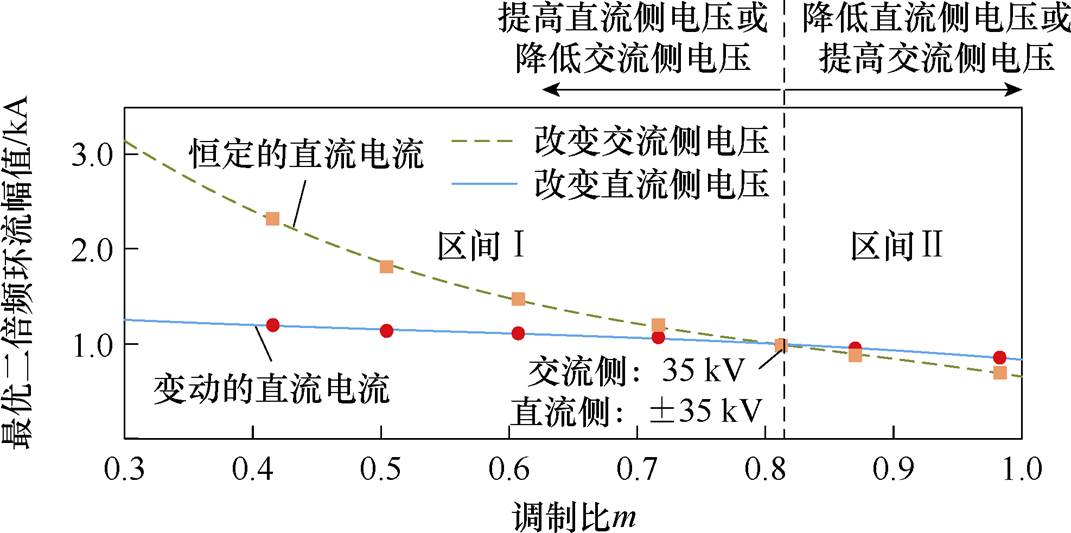
图9 最优二倍频环流幅值-m曲线
Fig.9 Amplitude of optimal second harmonic circulating current-m curves
以降低二倍频环流幅值为优化目标,在区间Ⅱ内,降低直流侧电压或提高交流侧电压均能提高系统调制比。但由于传输功率不变的前提条件,前者还会同时增大直流侧电流,因此在同一调制比下,降低直流侧电压方案的最优二倍频环流幅值更高,但直流侧电压下降有利于降低子模块级联数量和耐压等级,同时优化直流侧建设成本。而后者在传输功率及直流侧电压不变的前提下,对交流侧电压的提高可以有效降低交流侧电流,配合相对较低的最优环流值,可以显著优化电力电子器件通流压力及系统损耗,但交流侧电压等级的提高会带来额外的经济需求。同理,以额定工况为基准点,提高直流侧电压或降低交流侧电压会导致调制比下降至区间Ⅰ内。前者以剧增的直流电压为代价获得了与后者相比相对较小的最优环流值,以调制比m=0.3为例,直流电压需升高至190 kV;后者虽然在电压等级上有明显优势,但会同比增大交流侧电流及最优环流值。考虑系统正常工况下电压的波动幅度,推荐设置系统额定调制比为0.75~0.85,可以在避免过调制的同时尽可能地降低满足能量平衡的最优环流值。
环流在AM-MMC桥臂能量平衡的过程中起到关键作用,但在稳态条件下,系统中不存在相关电气量指示当前环流幅值与最优环流幅值的差距。系统能量平衡时外部表现为稳定的子模块电容电压,以中桥臂电容电压为基准,若电压平均值发生偏移,则表明当前环流条件无法维持能量平衡。对数学建模及能量平衡机理推导过程中涉及的平均化及线性化操作,g2a2理论最优值-m曲线会存在偏差,因此采用控制系数离线预置及在线寻优相结合的控制策略,控制策略流程如图10所示。具体措施如下:首先根据系统实时调制比确定g2a2理论最优值并对环流进行控制,以中间桥臂子模块电容电压二倍频周期(2w)的平均值 为依据判断当前环流是否可以满足能量平衡。若无法满足则通过基于比例-积分(PI)控制器的能量平衡控制环节调整g2a2并控制二倍频环流为实际最优值;若处于平衡状态,则采用梯度递减的方式小幅度逐步降低g2a2绝对值,即使在过程中越过了能量平衡边界也不会给系统带来剧烈的影响,在电容电压偏移发生后,再基于能量平衡控制环节将环流稳定于实际最优值。
为依据判断当前环流是否可以满足能量平衡。若无法满足则通过基于比例-积分(PI)控制器的能量平衡控制环节调整g2a2并控制二倍频环流为实际最优值;若处于平衡状态,则采用梯度递减的方式小幅度逐步降低g2a2绝对值,即使在过程中越过了能量平衡边界也不会给系统带来剧烈的影响,在电容电压偏移发生后,再基于能量平衡控制环节将环流稳定于实际最优值。
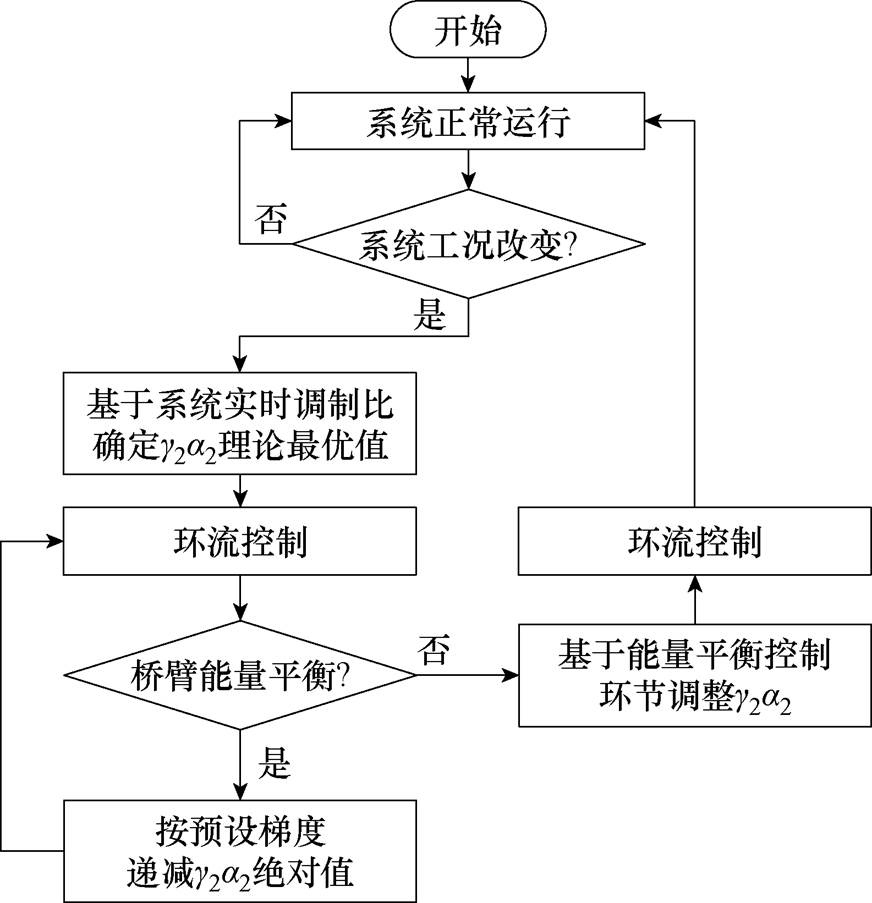
图10 基于环流优化的能量平衡控制策略流程
Fig.10 Flow chart of energy balance control strategy based on circulating current optimization
综上所述,可得基于环流优化的能量平衡控制器框图如图11所示。图中,P和Q分别为系统的有功和无功功率,id和usd分别为阀侧电流和网侧电压的d轴分量,iq和usq分别为阀侧电流和网侧电压的q轴分量,*标记为对应量的参考值。 和
和 分别为参考电压的d轴和q轴分量,
分别为参考电压的d轴和q轴分量, 为用于环流控制的参考电压共模分量,
为用于环流控制的参考电压共模分量, 、
、 和
和 分别x相(x=a, b, c)的阀侧参考电压、等效上桥臂和等效下桥臂的参考电压,ixue和ixle分别为x相等效上、下桥臂的电流。虽然复用模式的引入和相单元结构的变化导致AM- MMC具有新的环流数学模型,但环流相关的等效电路和控制方法仍与传统MMC高度一致,通过在等效桥臂调制波叠加共模分量即可完成环流控制,被控量环流采用比例-积分-谐振(PIR)环节进行控制[25-27]。基于离线系数预置及在线寻优相结合的控制策略,根据系统实际调制比及直流侧电流确定被控二倍频环流幅值,即可在不同工作模式下以最优环流实现桥臂能量平衡。
分别x相(x=a, b, c)的阀侧参考电压、等效上桥臂和等效下桥臂的参考电压,ixue和ixle分别为x相等效上、下桥臂的电流。虽然复用模式的引入和相单元结构的变化导致AM- MMC具有新的环流数学模型,但环流相关的等效电路和控制方法仍与传统MMC高度一致,通过在等效桥臂调制波叠加共模分量即可完成环流控制,被控量环流采用比例-积分-谐振(PIR)环节进行控制[25-27]。基于离线系数预置及在线寻优相结合的控制策略,根据系统实际调制比及直流侧电流确定被控二倍频环流幅值,即可在不同工作模式下以最优环流实现桥臂能量平衡。
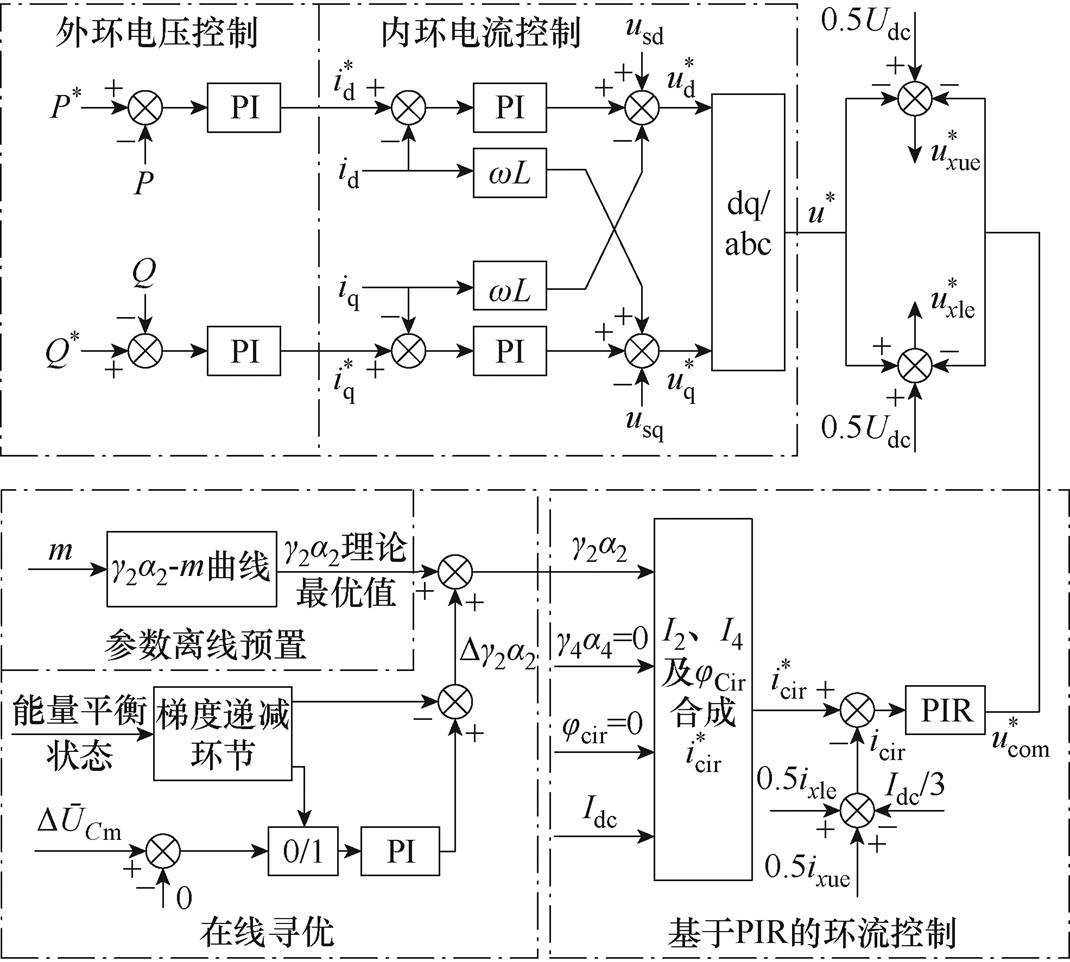
图11 基于环流优化的能量平衡控制策略框图
Fig.11 Diagram of energy balance control strategy based on circulating current optimization
本节通过仿真模型与实验样机,系统性验证环流频谱特性及时域表达式推导的正确性,说明能量平衡机理理论与实际运行的一致性,并展示所提控制策略的效果。
基于Matlab/Simulink搭建了如图12所示的单端AM-MMC HVDC仿真模型,系统具体参数见表1,交流侧输出电压为33电平,选取A相展示及分析仿真结果。
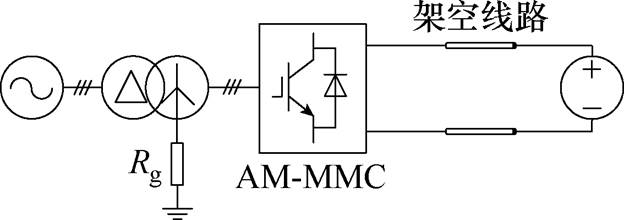
图12 单端AM-MMC HVDC仿真模型
Fig.12 Topology of single-terminal AM-MMC HVDC system
表1 仿真系统参数
Tab.1 Parameters of simulation system
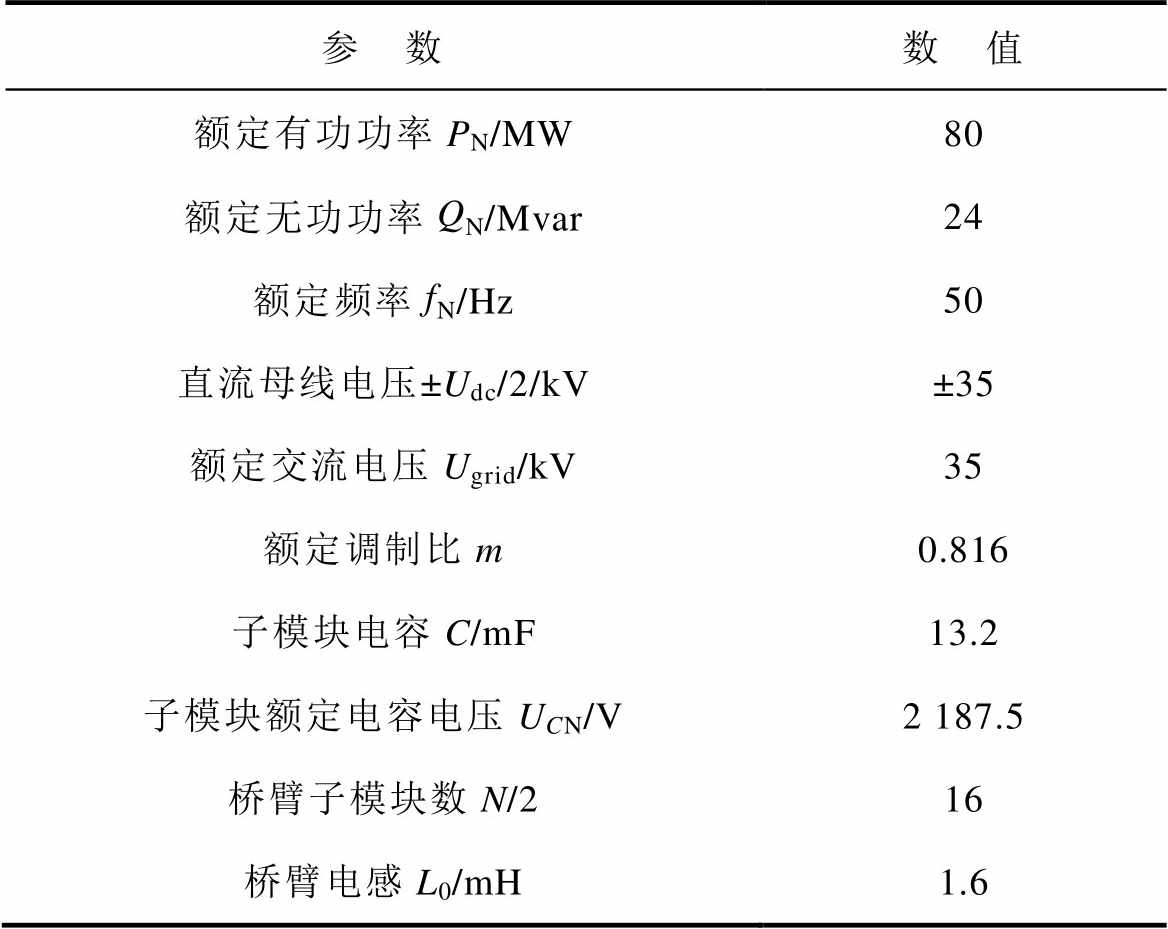
参 数数 值 额定有功功率PN/MW80 额定无功功率QN/Mvar24 额定频率fN/Hz50 直流母线电压±Udc/2/kV±35 额定交流电压Ugrid/kV35 额定调制比m0.816 子模块电容C/mF13.2 子模块额定电容电压UCN/V2 187.5 桥臂子模块数N/216 桥臂电感L0/mH1.6
5.1.1 环流数学模型验证
基于式(20)及式(25)推导的环流数学模型,通过图13所示多工况仿真对比验证,其幅值及相位特性与仿真实测结果误差小于5%,表明了环流建模结果的准确性。该高精度环流计算框架为能量平衡机理的量化解析及基于环流优化的能量平衡控制策略的设计奠定了严格的数学基础。
5.1.2 能量平衡机理与控制策略稳态性能的验证
图14所示为环流仿真结果及其频谱分析,当0.5 s投入所提出环流优化控制策略后,环流四倍频谐波分量被完全抑制,环流二倍频分量幅值稳定于无控制时的约0.531 7(误差<0.5% ,幅值为直流侧电流的约0.877 2(误差<1.5%,与第4节控制系数寻优结果高度吻合。
,幅值为直流侧电流的约0.877 2(误差<1.5%,与第4节控制系数寻优结果高度吻合。
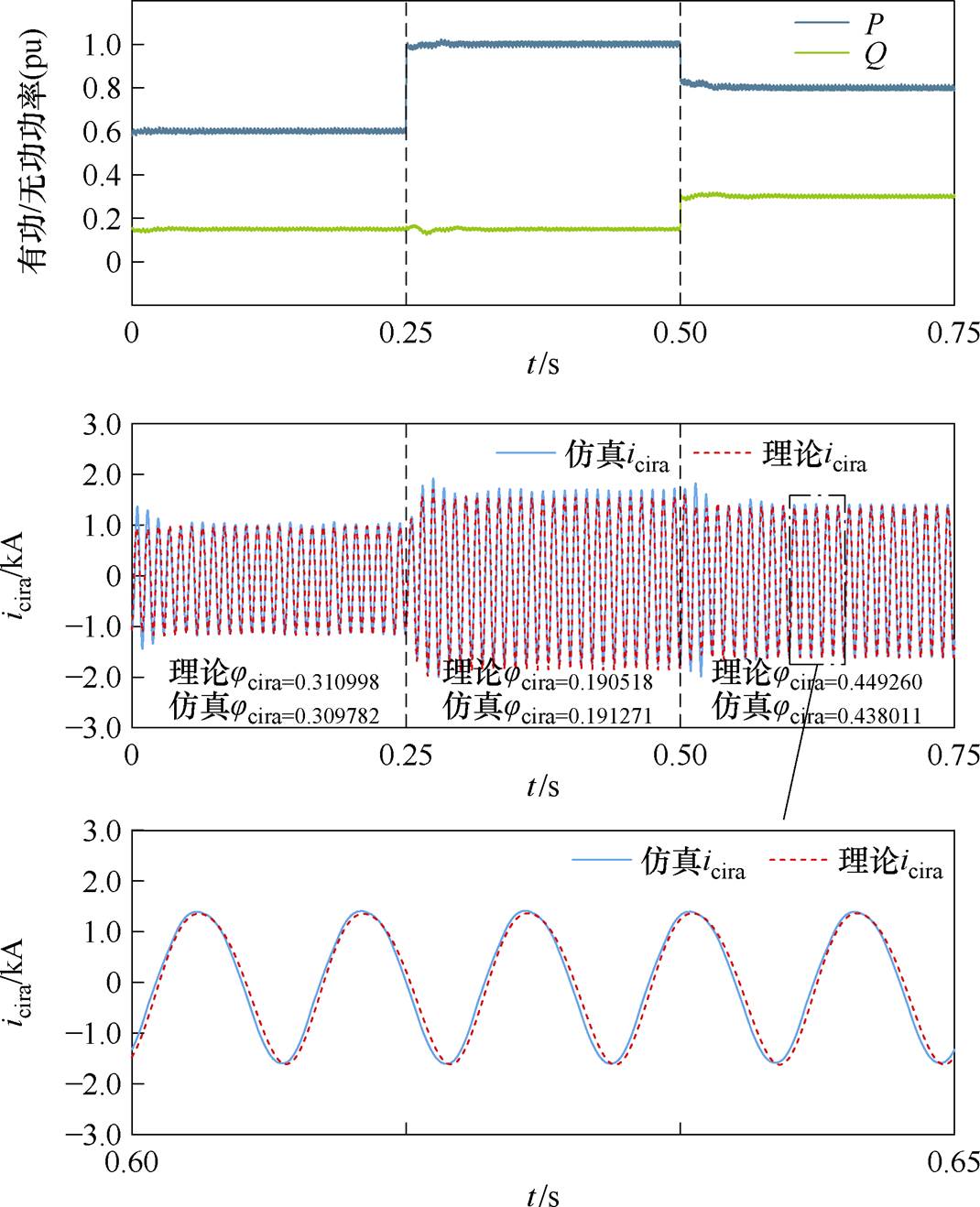
图13 A相环流对比结果
Fig.13 Comparison results of circulating current in phase A
图15所示为A相中桥臂输出电压仿真结果及其频谱分析,中间桥臂输出电压严格遵循理论推导的频谱特性,即仅包含直流及偶数倍频分量。环流优化控制后,其直流与偶数倍频分量(b0=0.313 8, b2=0.232 5, b4=0.012 6)基本落入图6b所示稳定运行区域,验证了中间桥臂输出电压、环流幅相特性及能量平衡条件的动态关系。根据桥臂电流情况自适应重构中间桥臂输出电压,控制策略投入后,其直流分量降低15.17%,二倍频分量提高至2.12倍,四倍频分量降低70.07%。这种基于桥臂电流动态匹配中间桥臂输出电压的调制特性,说明桥臂等效调制策略具备宽范围环流的运行能力,为基于环流优化的能量平衡策略提供了实现基础。
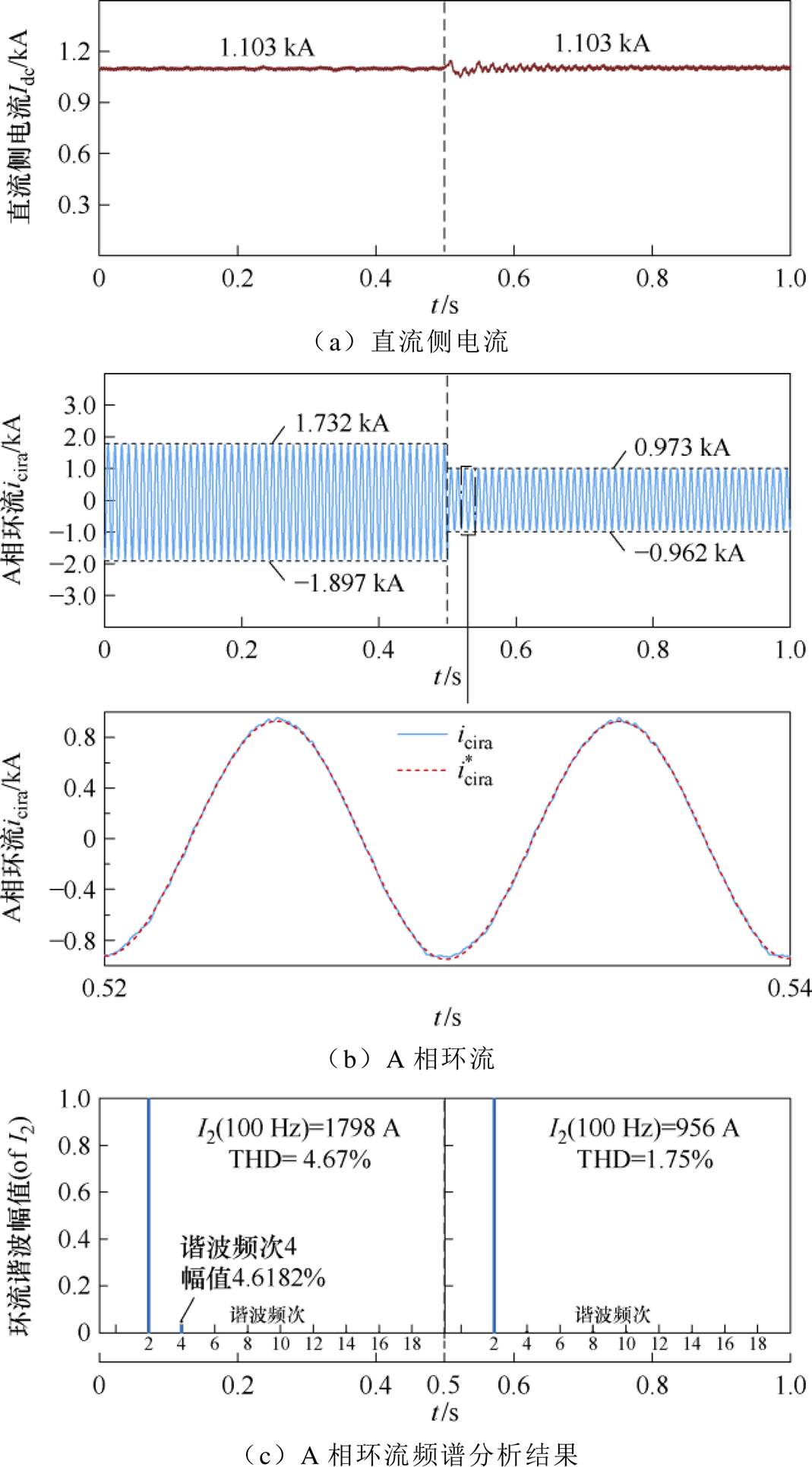
图14 环流仿真结果及其频谱分析
Fig.14 Simulation results and spectral analysis of circulating current
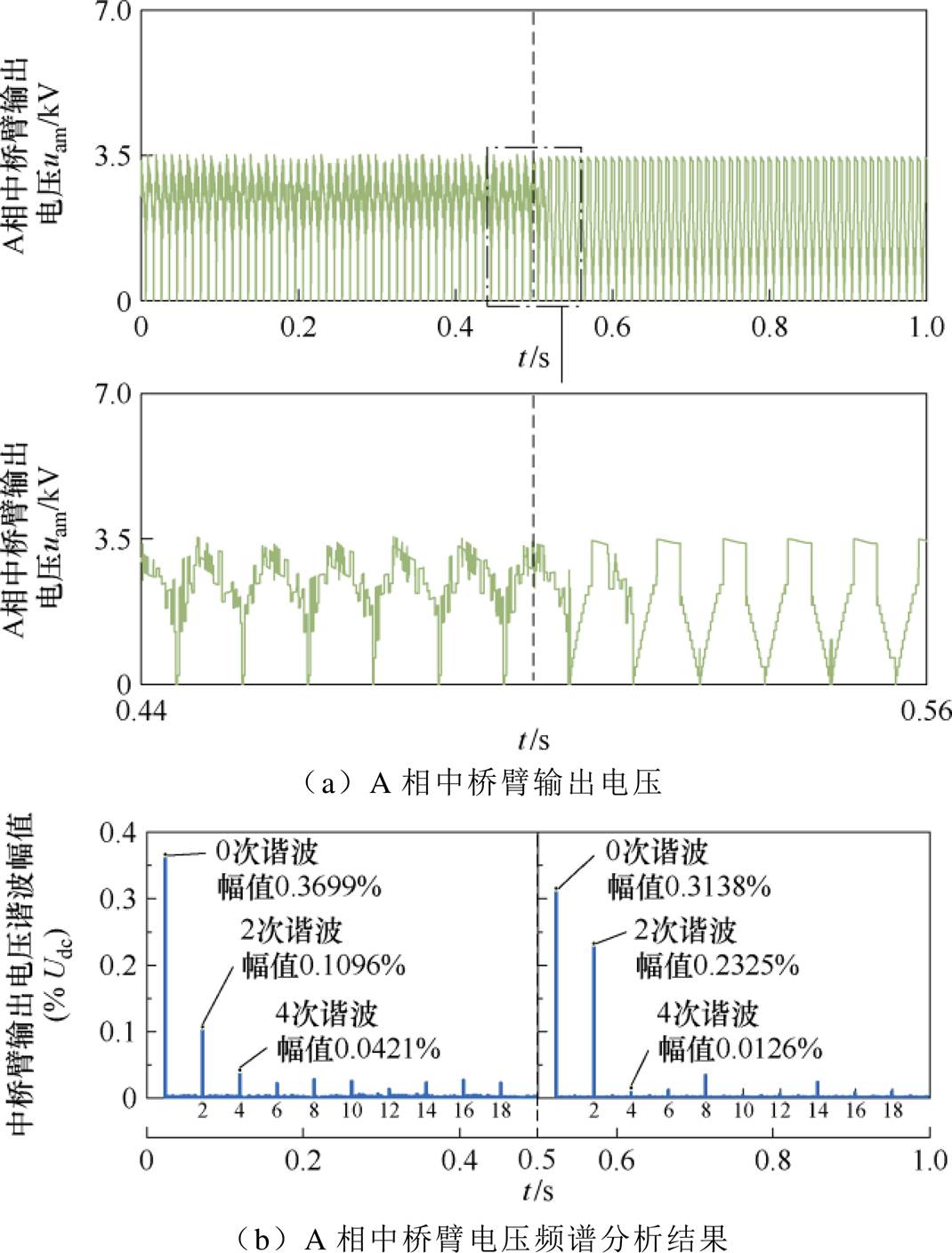
图15 中桥臂输出电压仿真结果及其频谱分析
Fig.15 Simulation results and spectral analysis of the middle arm output voltage
桥臂电流仿真结果如图16所示。由图16可见,所提控制策略显著优化了桥臂电流:与无额外控制依靠参数调试稳定运行的情况相比,AM-MMC上下桥臂电流峰值与有效值分别降低29.04%及30.81%,中间桥臂电流峰值与有效值降幅达42.10%及52.19%,非常可观地降低了器件通流能力需求及换流器损耗。
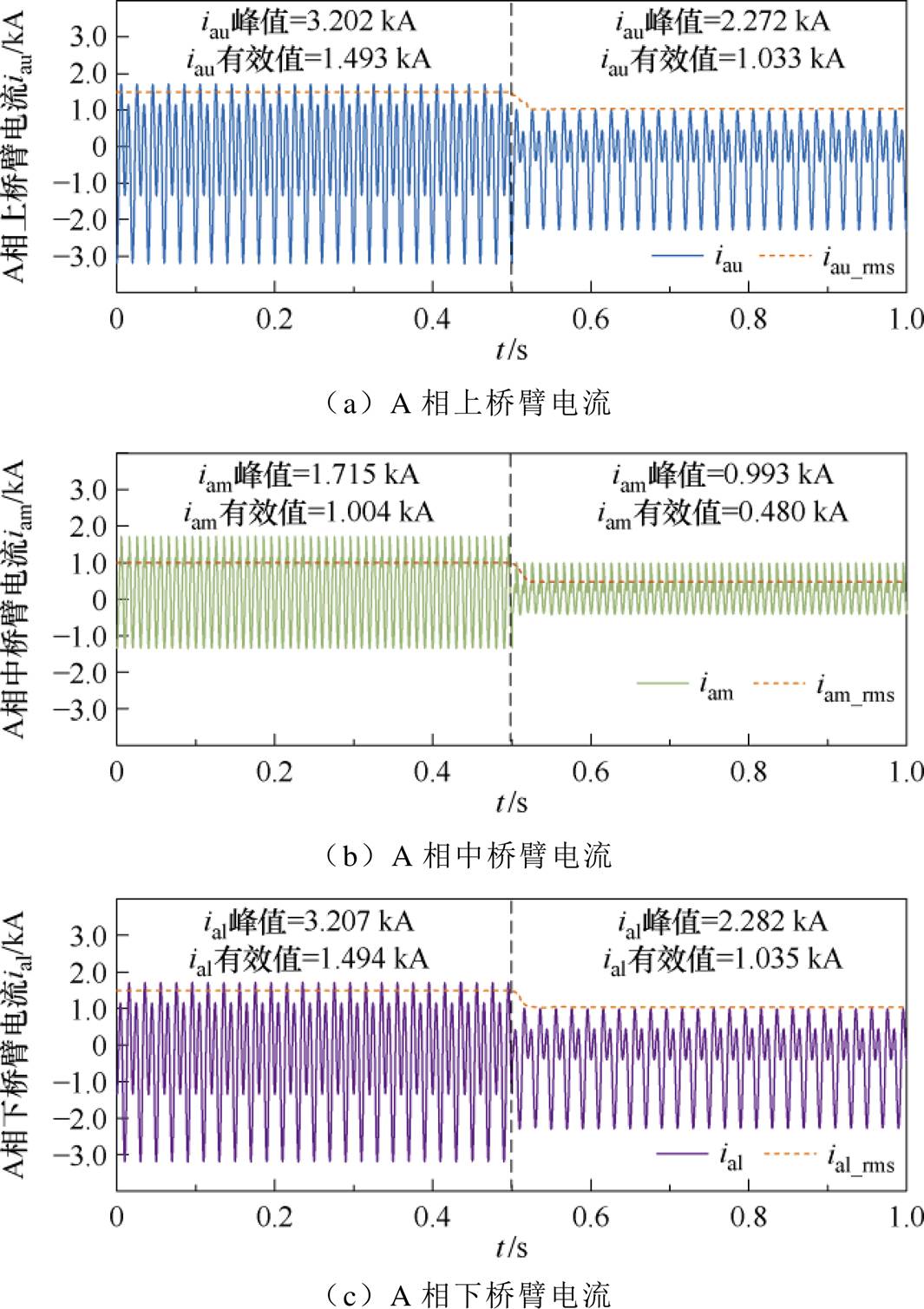
图16 桥臂电流仿真结果
Fig.16 Simulation results of arm currents
子模块电容电压仿真结果如图17所示,所提控制策略将上、下桥臂电容电压平均波动范围从±11%UCN压缩至±6.5%UCN,将中间桥臂电容电压平均波动范围从±6%UCN压缩至±2%UCN。该结果说明了环流优化控制可有效约束能量交互强度,稳定的电容电压表明了在当前环流条件下换流器能量可以实现平衡。
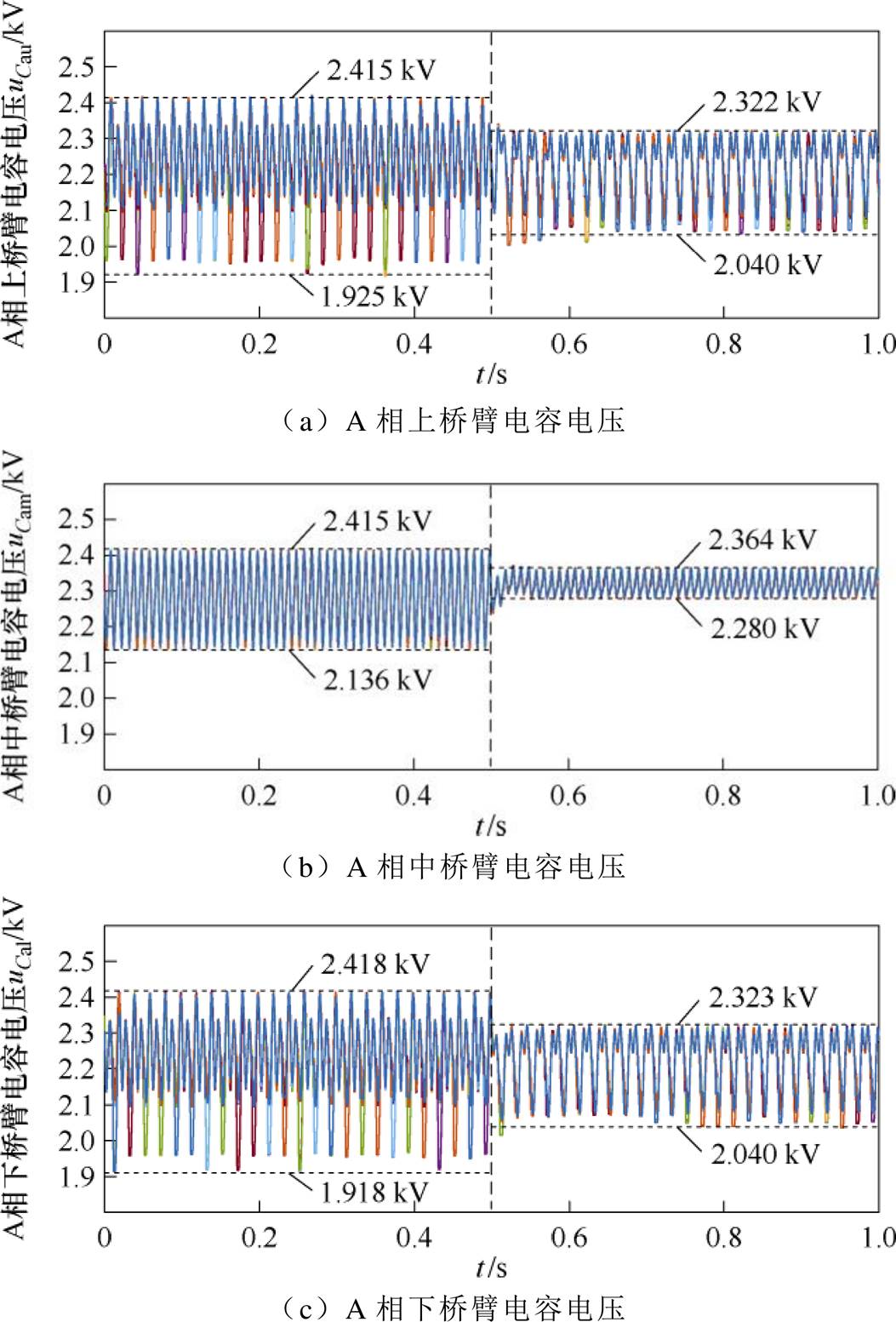
图17 子模块电容电压仿真结果
Fig.17 Simulation results of submodule capacitor voltages
5.1.3 控制策略动态性能及宽范围调压能力验证
通过设计g2a2的梯度递减仿真,对理论推导的能量平衡环流边界及在线寻优的能量平衡控制环节进行验证。g2a2边界值及能量平衡控制验证结果如图18所示。如图18a所示,在撤去能量平衡控制的前提下,g2a2绝对值在0.5 s及1.0 s时刻分别降低1%至越过理论阈值。仿真结果表明:当g2a2为-0.851 0时,中间桥臂子模块电容电压出现偏差,逐渐升高的电容电压意味着桥臂能量持续累积,过小的环流无法满足平衡约束条件。验证了理论寻优所得临界控制系数的物理意义,即环流低于理论阈值时,组成等效桥臂时中间桥臂无法通过有限次电容均压排序抵消能量累积效应。如图18b所示,验证基于PI控制器的能量平衡控制环节的有效性,当中间桥臂子模块电容电压偏移量越过阈值时,能量平衡控制环节生效,根据电容电压平均值的变化基于PI控制器对g2a2的取值进行修正,电容电压迅速回归稳态,说明中间桥臂重新恢复了能量平衡状态。
动态性能验证结果如图19所示,通过连续调节系统的有功及无功功率对所提策略的动态性能进行验证,同时展示控制系数离线预置与在线寻优策略相结合的控制效果。如图19a所示,仿真系统分别于3、6及9 s时对系统传输功率进行调节,系统交直流侧电压及电流如图19b所示。如图19c所示,以3~6 s的仿真结果为例进行说明,功率阶跃会导致系统电压发生小幅度变化,进而影响系统实时调制比及g2a2理论最优值。在区间Ⅰ内基于梯度递减环节逐步降低g2a2绝对值并对环流幅值进行实时控制,直至越过边界值导致电容能量开始积累,其电压平均值开始小幅度升高,此时投入能量平衡控制环节对g2a2值进行修正直至稳定于g2a2实际最优值。在功率调节过程中,g2a2最优值随着系统调制比的升高而降低,符合理论分析结果。此外,被控二倍频环流与直流侧电流的比例基本与g2a2取值对应,并且传输功率、交直流侧电压电流、子模块电容电压及环流均表现出良好的性能,有效验证了所提策略的鲁棒性。
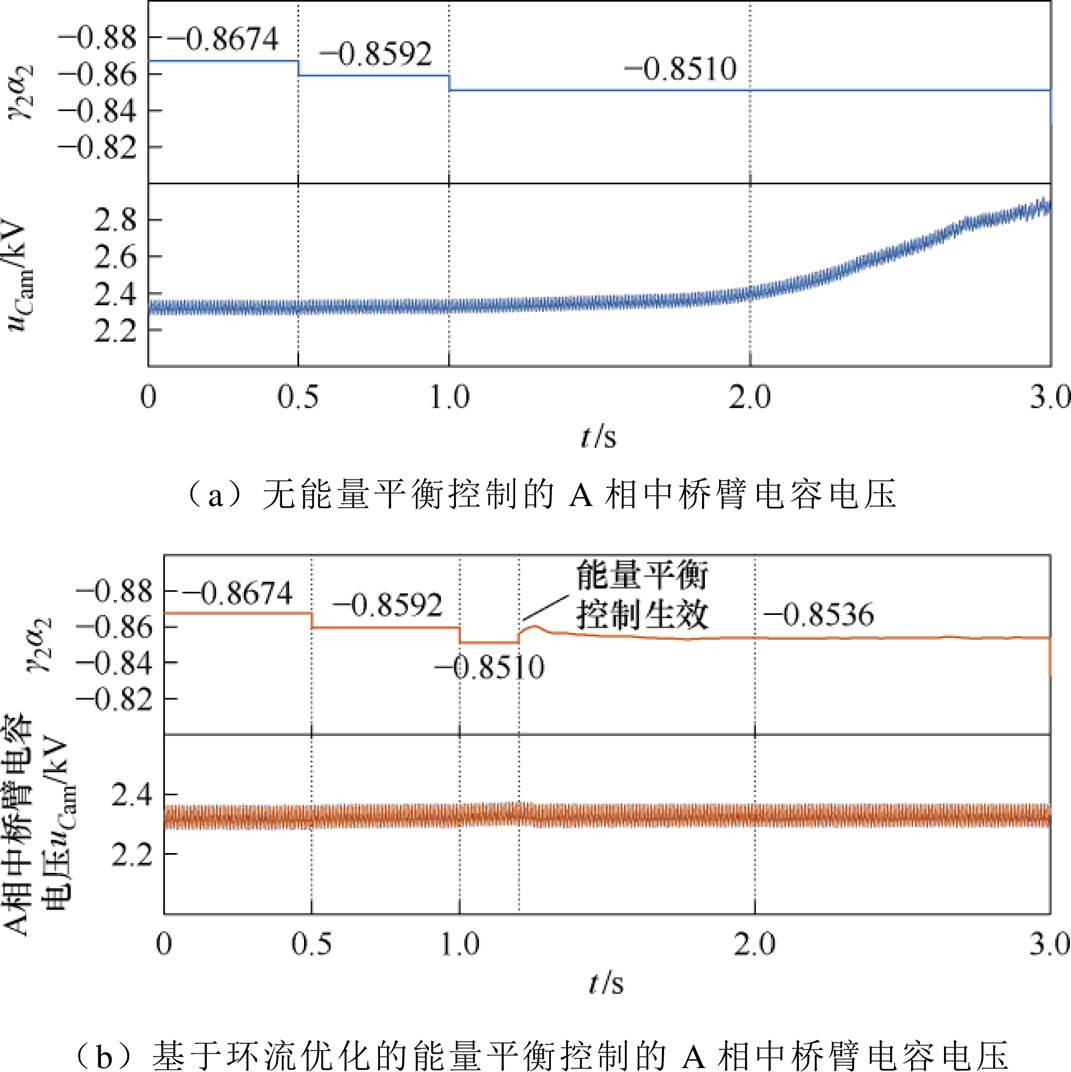
图18 g2a2边界值及能量平衡控制验证结果
Fig.18 Verification results of g2a2 boundary value and energy balance control
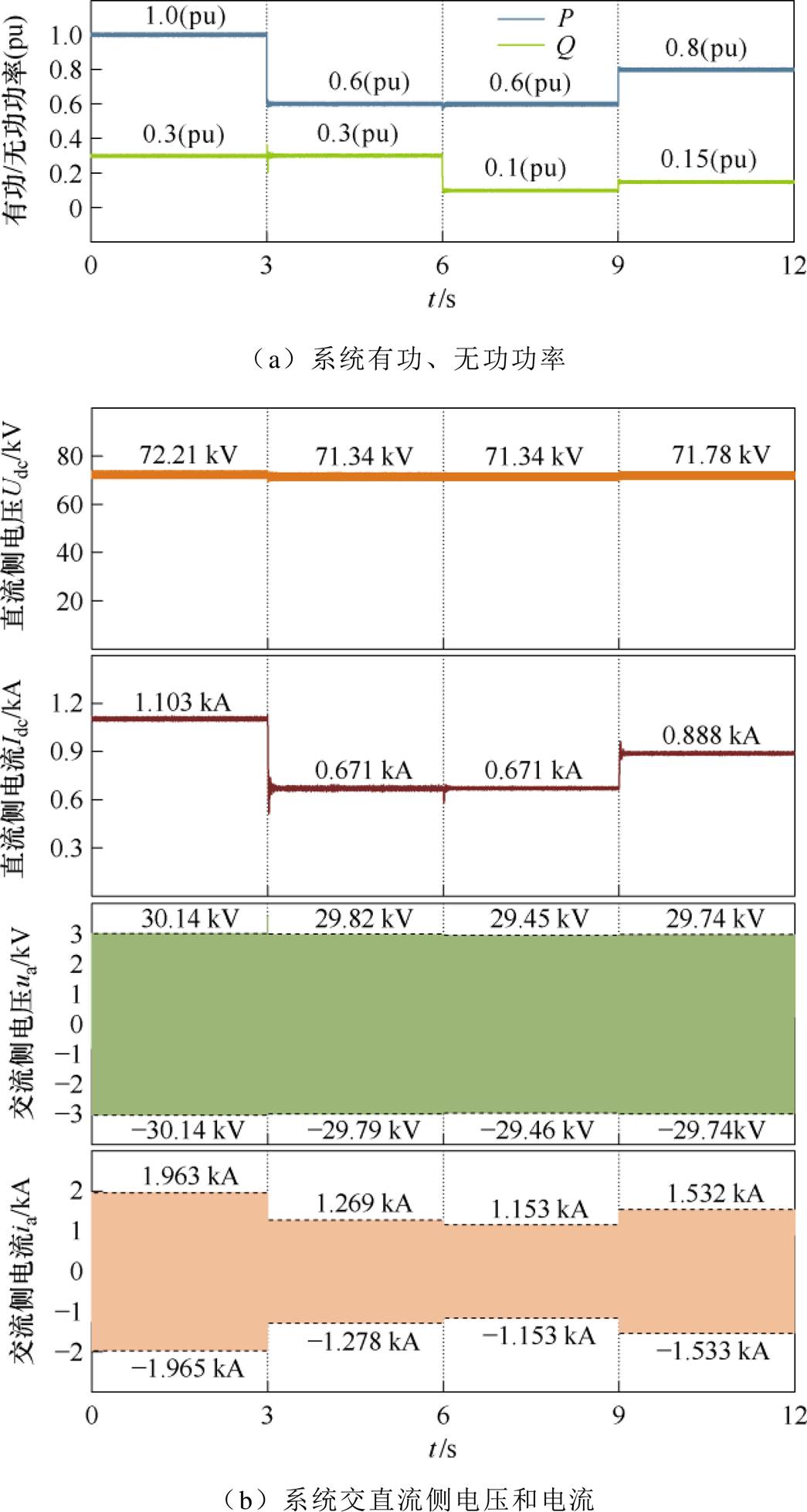
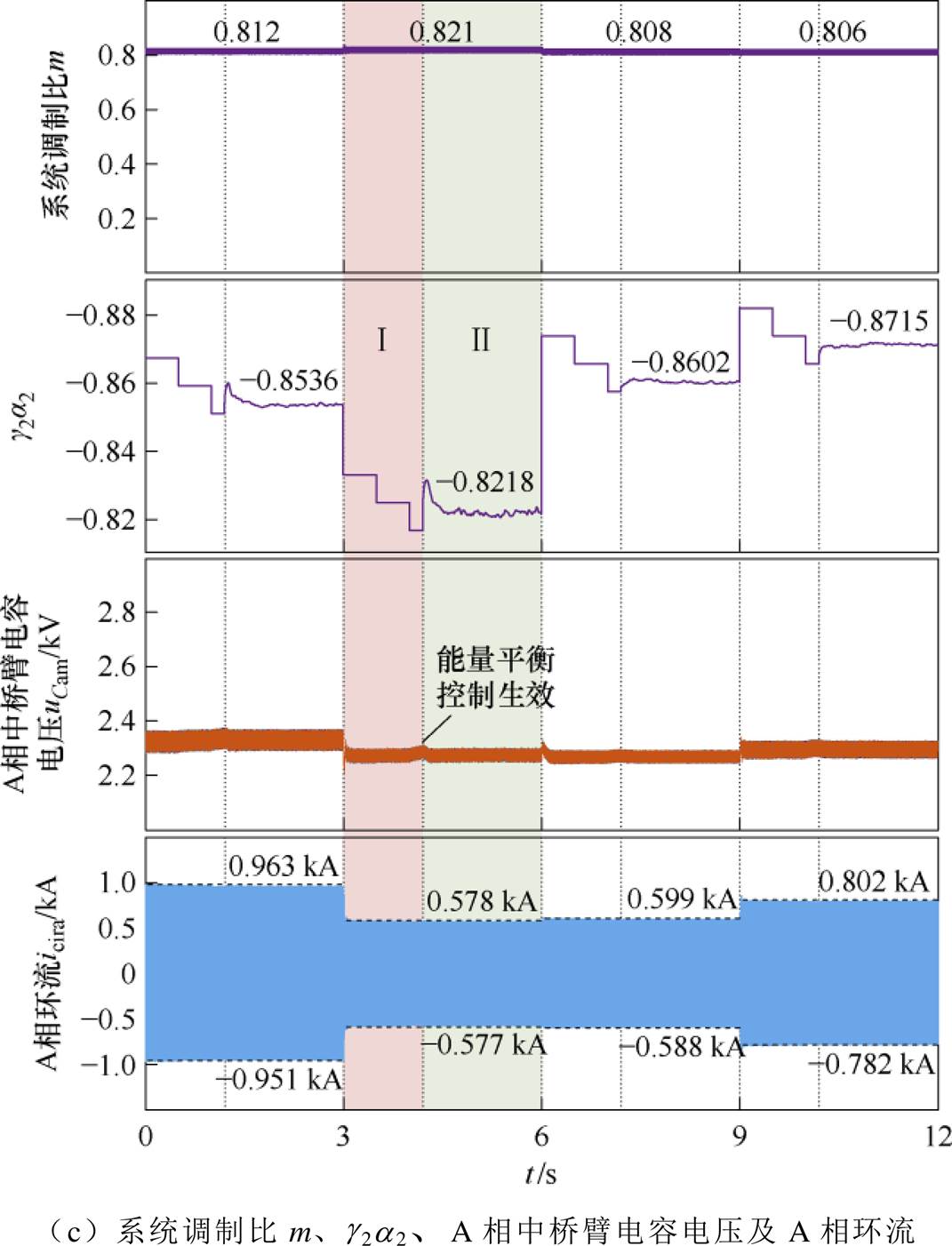
图19 动态性能验证结果调制比m、g2a2、uCam、icira
Fig.19 Transient performance verification results
对所提策略的宽范围调压能力进行验证,宽范围调压能力验证结果如图20所示。仿真系统分别于3、6及9 s时对系统电压进行调整。3 s时交流侧电压由35 kV降低至33 kV,跌落5.71%;6 s时直流侧电压由70 kV降低至62 kV,跌落11.43%;9 s时直流侧电压恢复额定电压,而交流电压降低至20 kV,与额定值相比跌落了42.86%,最后阶段的工况仅是为了验证调制比大范围波动下策略的性能,在实际工况中出现此类工况应紧急采取故障应对措施。图20a所示为系统传输功率情况,图20b所示为系统交直流侧电压及电流,图20c所示分别为系统实时调制比、控制系数g2a2、A相中桥臂电容电压及A相环流。系统实时调制比与g2a2的关系与4.2节中理论分析结果基本一致。无论系统如何进行调压,所提策略均能基于当前工况,将环流控制在能够实现系统能量平衡的最小水平,使得AM-MMC以最优环流实现了宽范围电压调节。
动态性能与宽范围调压能力的验证结果共同揭示了AM-MMC的本质特征,保证能量平衡的最优二倍频环流幅值与直流侧电流保持固定比例关系,且该比例系数与系统的实际调制比呈负相关特性。上述仿真验证结果从稳态和动态性能说明了所提策略的有效性和优越性。通过引入基于环流优化的能量平衡控制方法,能够显著提升桥臂复用型MMC在实际工程中的应用价值和系统可靠性。
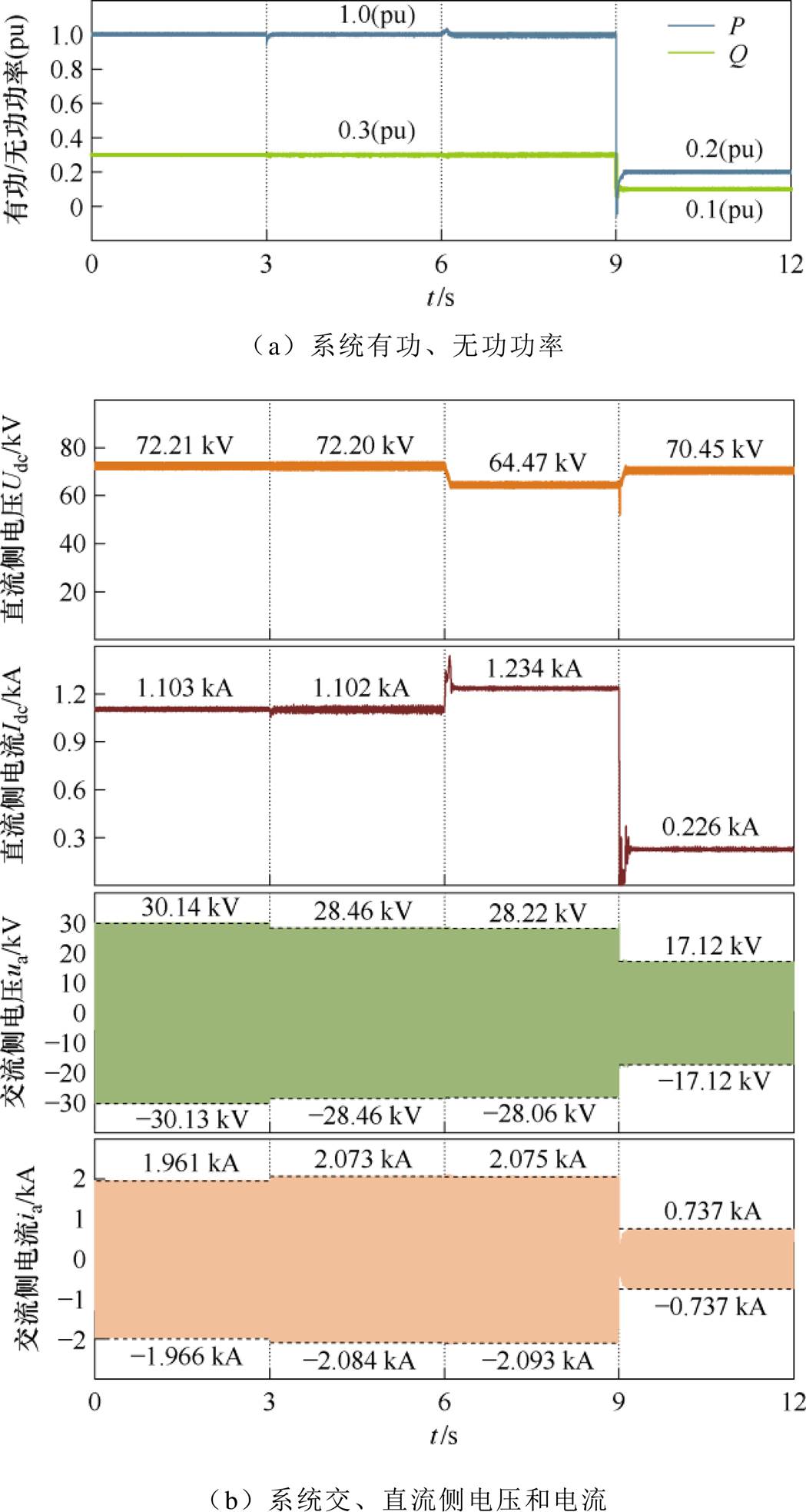
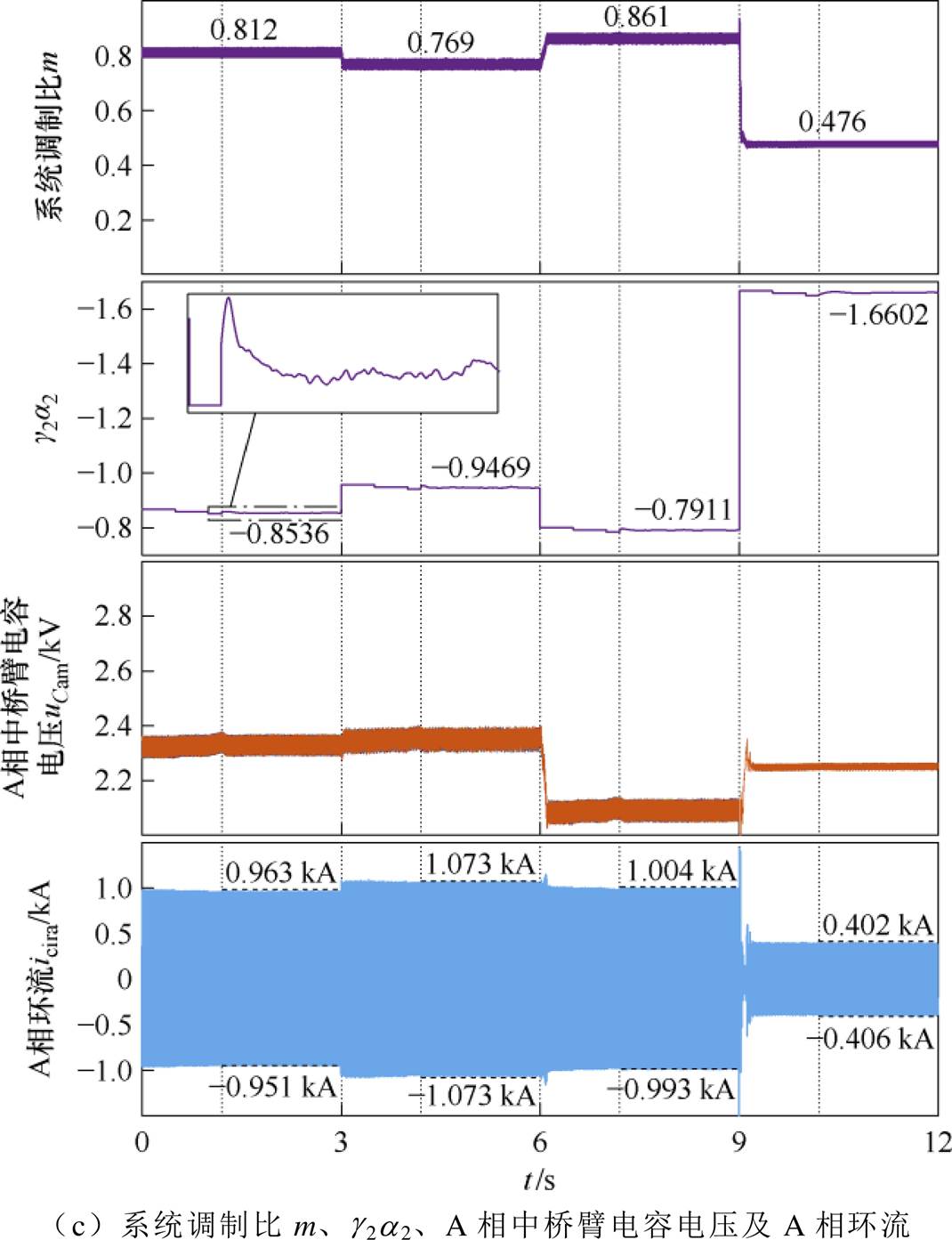
图20 宽范围调压能力验证结果
Fig.20 Verification results of wide range voltage regulation capability
基于RTU-BOX204实时数字控制器搭建的AM-MMC实验样机如图21所示,系统参数见表2。针对实验室级AM-MMC子模块数量受限导致的离散化效应,采用改进型高频均压调制策略:将均压操作频率提升至2 kHz,消除电压离散化偏差,实现电容电压的连续化近似,保证实验系统与理论推导模型有较高的一致性。
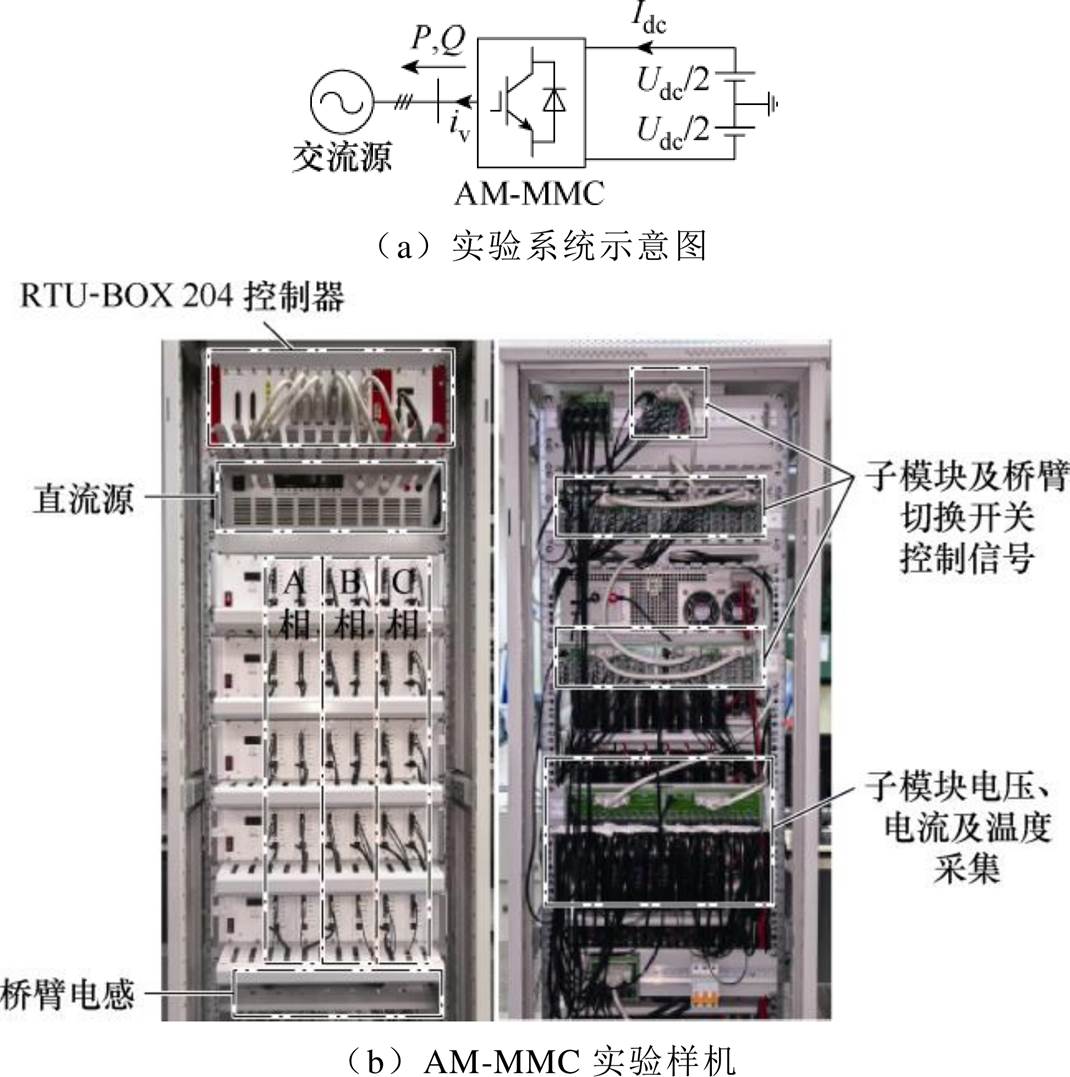
图21 实验系统示意图及AM-MMC实验样机
Fig.21 Schematic diagram of experimental system and AM-MMC experimental prototype
表2 实验系统参数
Tab.2 Parameters of experimental system
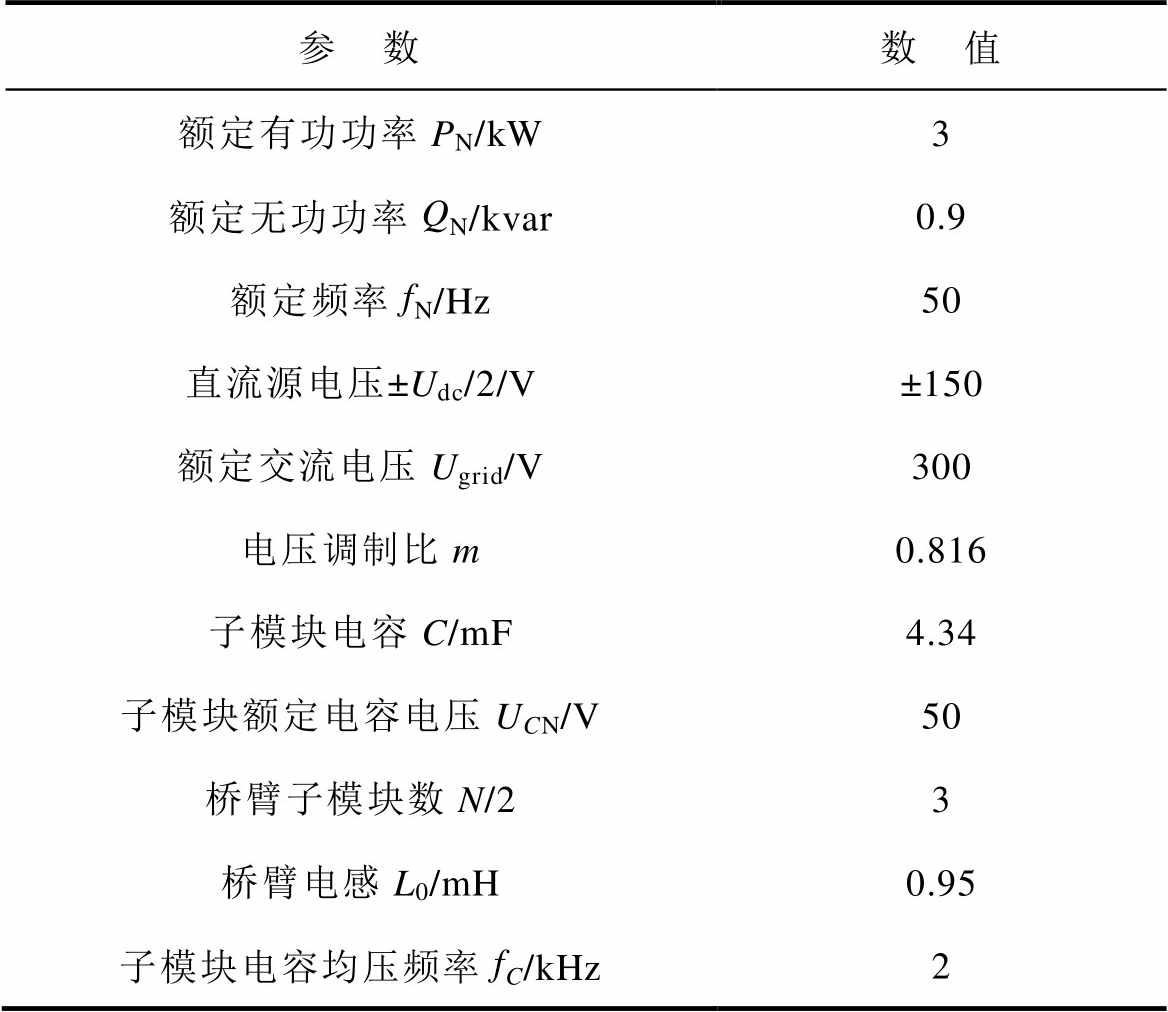
参 数数 值 额定有功功率PN/kW3 额定无功功率QN/kvar0.9 额定频率fN/Hz50 直流源电压±Udc/2/V±150 额定交流电压Ugrid/V300 电压调制比m0.816 子模块电容C/mF4.34 子模块额定电容电压UCN/V50 桥臂子模块数N/23 桥臂电感L0/mH0.95 子模块电容均压频率fC/kHz2
图22所示为实验系统交直流电压及电流,由于实验系统的少子模块特性,交流侧输出电压阶梯特征明显,实时调制比需要基于基频分量计算,由RTU-BOX204实时数字控制器获取的实际运行调制比在0.798~0.8之间,根据图8曲线可以得到g2a2理论最优值约为-0.925,基于此理论值在系统运行0.5 s后投入所提出的基于环流优化的能量平衡策略,并在运行1.0 s后将g2a2降低为原来的97%。
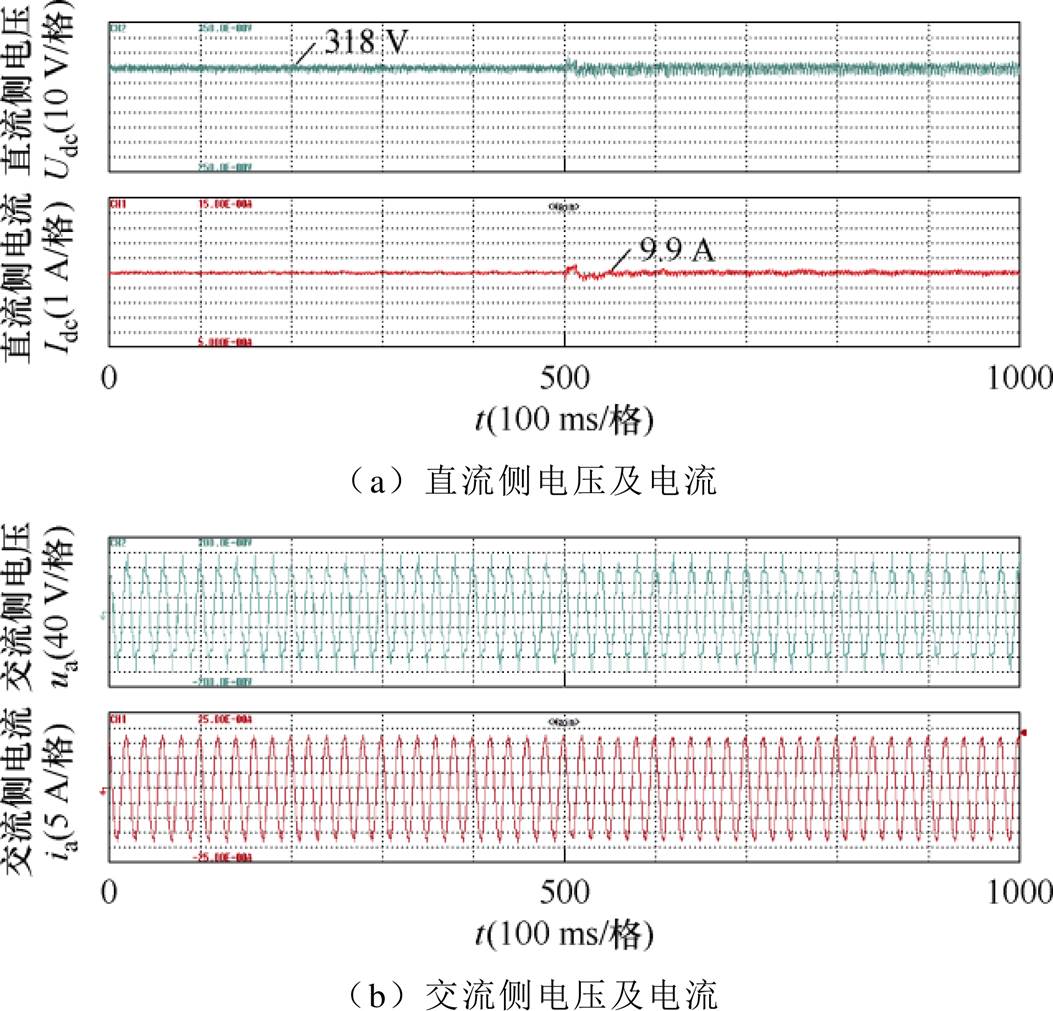
图22 实验系统交直流侧电压及电流波形
Fig.22 Waveforms of voltage and current in AC and DC side of experimental system
由实验结果可知,采用基于环流优化的能量平衡策略的AM-MMC实验系统可以得到与仿真系统基本一致的结果。图23所示为A相环流及各桥臂电流波形,在采用所提策略后,环流振幅为-9.6~9.5 A,说明四倍频环流被完全抑制,二倍频环流与直流侧电流的比例约等于0.970(误差<5%),由于环流成分的抑制,各桥臂电流波动幅度有所下降。
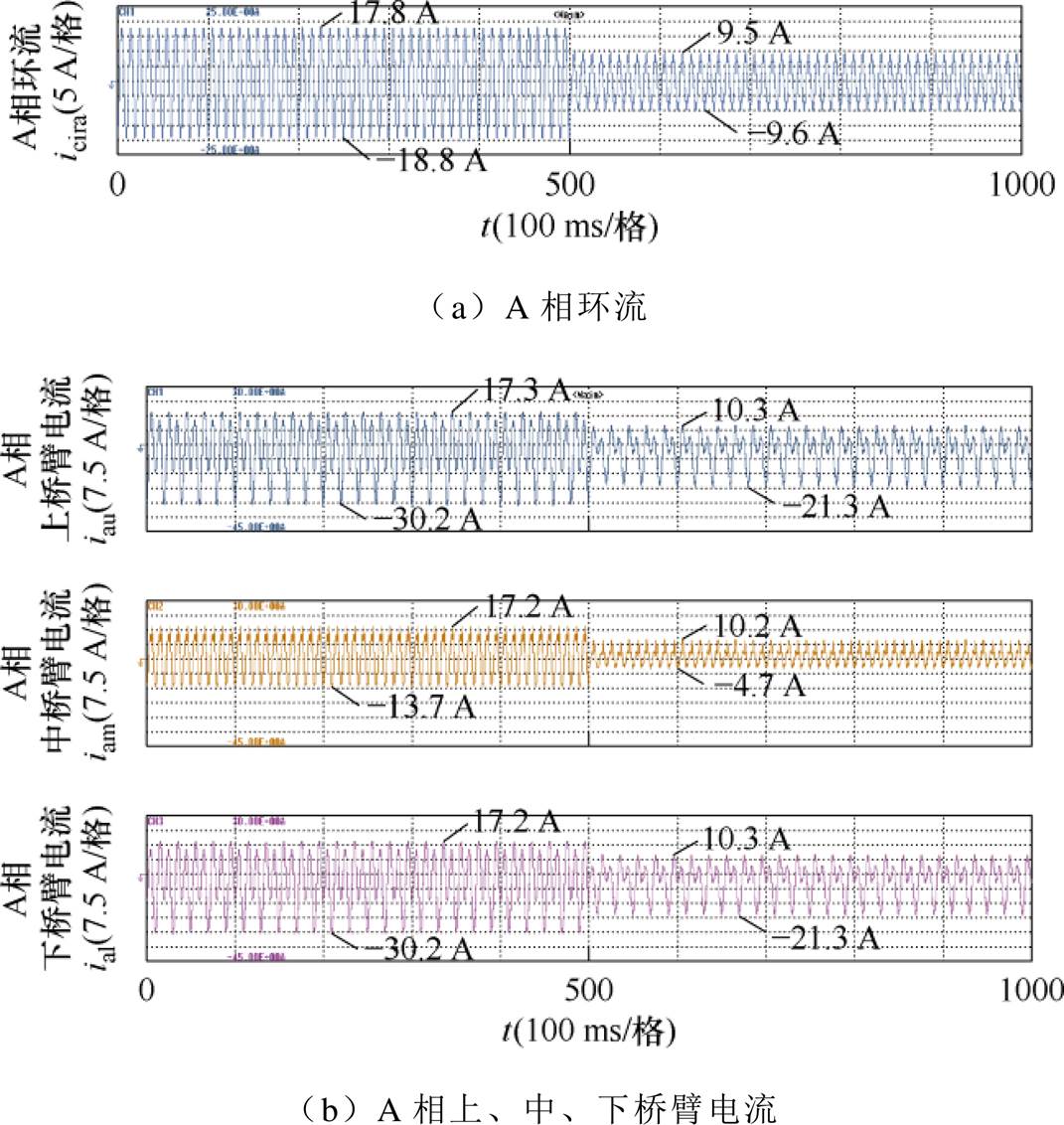
图23 实验系统环流及桥臂电流波形
Fig.23 Waveforms of circulating current and arm current of experimental system
图24所示为A相各桥臂子模块电容电压,电容电压波动幅度均得到有效降低,对于中间桥臂电容电压,其波动率由±9%压缩至±2%,能量波动强度降低78.5%。实验系统仅进行环流边界值验证,实验结果如图25所示,当g2a2从-0.925跃变至-0.897后(1.0~1.5 s),中间桥臂电容电压呈上升趋势,说明了小于理论边界的环流无法维持能量平衡。
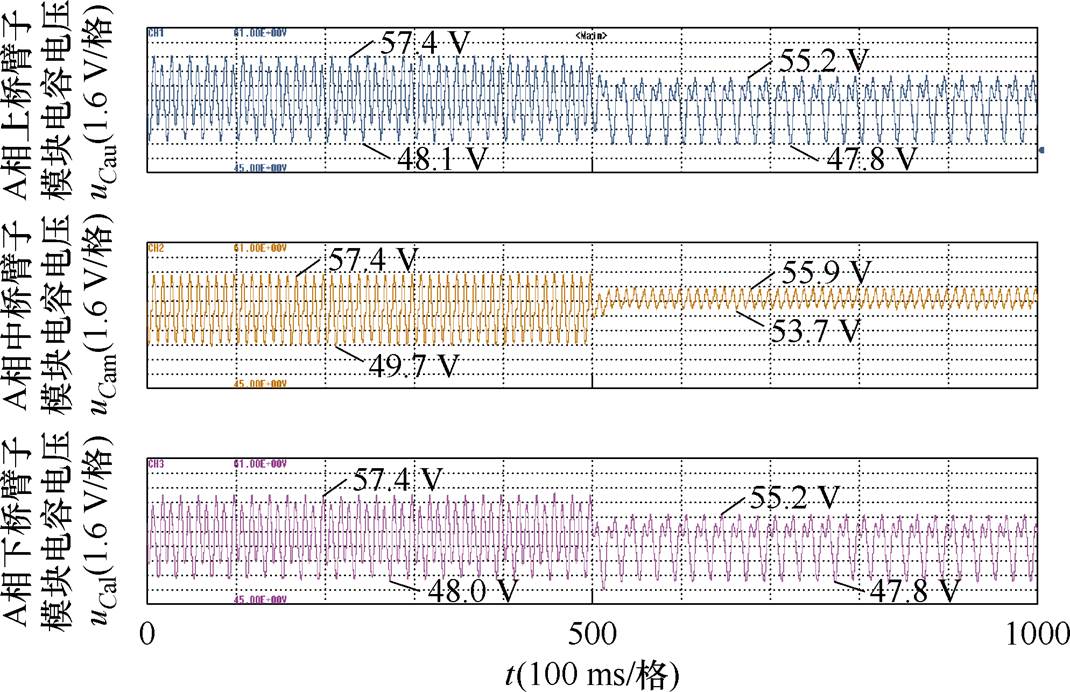
图24 实验系统子模块电容电压波形
Fig.24 Waveforms of submodule capacitor voltage of experimental system
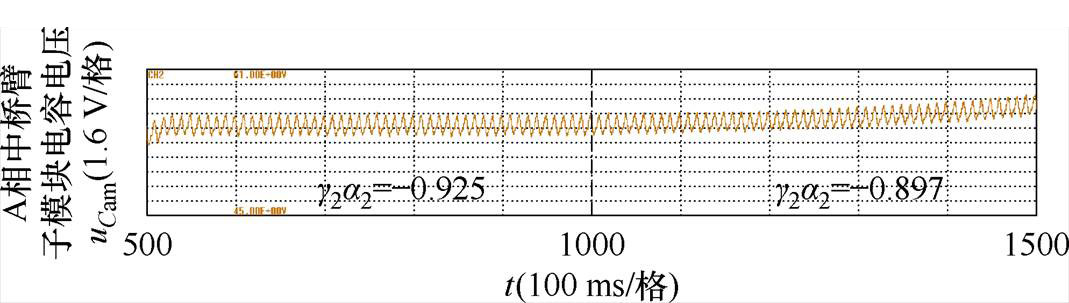
图25 实验系统最优控制系数验证结果
Fig.25 Verification results of optimal control coefficient in experimental system
上述结果从物理实验维度验证了所提策略在不同系统参数下的适用性,说明了所推导能量平衡约束条件与系统调制比及桥臂输出电压能力相关联特征的正确性。
针对混合型多电平换流器在轻型化设计中面临的能量自平衡难题,本文以AM-MMC为研究对象,创新性地提出将环流作为能量平衡控制自由度,通过构建时域耦合解析模型,揭示桥臂分时复用的能量交互机理,设计基于主导谐波分量优化的控制策略,灵活高效地解决了能量平衡问题,显著提升了AM-MMC的工程应用价值。通过仿真系统及实验平台进行了验证,结论如下:
1)针对AM-MMC桥臂分时复用的耦合特性,本文建立了涵盖相单元全电流成分的动态解析模型。该模型通过精确解析子模块电容电压成分、动态开关函数非线性特征及多频段谐波电压电流交互机理,揭示了环流谐波生成机理。对相单元环流谐波生成机制与时域表达式的严格推导,为能量平衡机理的准确分析、环流参与能量平衡过程的量化表达及优化策略的设计提供了理论基础。
2)基于满足能量平衡的最优二倍频环流幅值与直流侧电流的比例关系与系统调制比相关的特性,所提策略采用控制系数离线预置及在线寻优相结合的方法,在保证系统稳态及动态性能的前提下实现了能量平衡与环流抑制的最优协调。相较于桥臂电压控制及谐波电流注入的能量平衡方法,本文策略无子模块额外配置需求及调压范围限制等弊端。以运行损耗和器件应力的小幅增加为代价,为海上风电汇集等轻型化需求场景提供了兼具动态稳定性与经济性的工程化解决方案。
3)本文建立的基于环流的“频谱解析-能量约束-控制解耦”的研究方法可拓展至其他轻型化拓扑结构。环流作为模块化多电平类换流器的固有特性,用以能量平衡控制时具备易于控制、无额外硬件需求等优势,为混合型MMC的能量平衡问题研究提供了新的思路。
附 录
1. 环流谐波系数
 (A1)
(A1)
其中
 (A2)
(A2)
 (A3)
(A3)
2. 简化谐波系数a2及a4(忽略除二、四倍频之外的环流分量)
 (A4)
(A4)
其中
 (A5)
(A5)
 (A6)
(A6)
3. 损耗核算
以第5节AM-MMC仿真系统为基础,搭建相同参数的传统MMC仿真系统,分别在有无环流控制的情况下对两个系统进行损耗核算,子模块与桥臂切换开关类型及电力电子器件型号见附表1。采用文献[28]的损耗核算方法,可以得到在额定工况下的损耗见附表2。
附表1 子模块及桥臂切换开关类型及器件选型
App.Tab.1 Types and devices of SMs and arm selection switches
部件类型型号 子模块半桥子模块ABB IGBT 5SNA2000K452300 桥臂切换开关ABB IGCT 5SHY42L6500
附表2 损耗核算结果
App.Tab.2 Simulation results of power loss (%)

仿真系统导通损耗开关损耗总计 桥臂切换开关总计桥臂切换开关总计 无环流抑制的MMC系统1.815 7201.815 720.100 9300.100 931.916 65 无环流抑制的AM-MMC系统1.576 490.205 171.781 660.314 520.000 380.314 902.096 56 基于环流抑制控制(CCSC)策略[29]的MMC系统0.733 1800.733 180.063 9600.063 960.797 14 基于环流优化控制策略的AM-MMC系统0.799 160.205 591.004 740.229 910.000370.230 281.235 03
参考文献
[1] 高本锋, 沈雨思, 宋瑞华, 等. 虚拟同步机控制模块化多电平变流器阻抗建模及次/超同步振荡稳定性分析[J]. 电工技术学报, 2025, 40(2): 559-573.
Gao Benfeng, Shen Yusi, Song Ruihua, et al. Impedance modeling and sub/super synchronous oscillation stability analysis of modular multilevel converter under virtual synchronous generator control[J]. Transactions of China Electrotechnical Society, 2025, 40(2): 559-573.
[2] 吴丽丽, 茆美琴, 施永. 含主动限流控制的MMC- HVDC电网直流短路故障电流解析计算[J]. 电工技术学报, 2024, 39(3): 785-797.
Wu Lili, Mao Meiqin, Shi Yong. Analytical calculation of DC short-circuit fault current of modular multi-level converter-HVDC grid with active current limiting control[J]. Transactions of China Electrotechnical Society, 2024, 39(3): 785-797.
[3] 刘欣, 袁易, 王利桐, 等. 柔性直流输电系统三端口混合参数建模及其稳定性分析[J]. 电工技术学报, 2024, 39(16): 4968-4984.
Liu Xin, Yuan Yi, Wang Litong, et al. Three-port hybrid parameter modeling and stability analysis of MMC-HVDC system[J]. Transactions of China Elec- trotechnical Society, 2024, 39(16): 4968-4984.
[4] 王锐, 王毅, 杨晗菲, 等. 具有宽运行范围的混合复用型模块化多电平拓扑及其能量均衡控制策略[J]. 电工技术学报, 2025, 40(15): 4740-4754.
Wang Rui, Wang Yi, Yang Hanfei, et al. A hybrid multiplexing MMC topology with wide operating range and energy balance control strategy[J]. Transa- ctions of China Electrotechnical Society, 2025, 40(15): 4740-4754.
[5] 李婧靓, 黄伟煌, 刘涛, 等. 特高压多端混合直流输电系统的控制策略研究[J]. 南方电网技术, 2018, 12(2): 47-55.
Li Jingjing, Huang Weihuang, Liu Tao, et al. Research on control strategy of multi-terminal hybrid UHVDC transmission system[J]. Southern Power System Technology, 2018, 12(2): 47-55.
[6] 杨雪飞, 杨绍远, 李桂源, 等. 昆柳龙直流工程柳州站双阀组充电跳闸事件分析及对策[J]. 南方电网技术, 2022, 16(2): 82-88.
Yang Xuefei, Yang Shaoyuan, Li Guiyuan, et al. Analysis of the kunliulong UHVDC tripping event during charging process of high and low values in Liuzhou converter station and countermeasure[J]. Southern Power System Technology, 2022, 16(2): 82-88.
[7] 蔡旭, 杨仁炘, 周剑桥, 等. 海上风电直流送出与并网技术综述[J]. 电力系统自动化, 2021, 45(21): 2-22.
Cai Xu, Yang Renxin, Zhou Jianqiao, et al. Review on offshore wind power integration via DC transmi- ssion[J]. Automation of Electric Power Systems, 2021, 45(21): 2-22.
[8] 梁富胜, 伦灿章, 熊根, 等. 大型海上换流站浮托安装数值模拟和实测分析[J]. 中国海洋平台, 2023, 38(4): 27-35, 79.
Liang Fusheng, Lun Canzhang, Xiong Gen, et al. Numerical simulation and field measurement analysis on floatover installation of large offshore converter station[J]. China Offshore Platform, 2023, 38(4): 27-35, 79.
[9] 秦康, 曹雨, 卢毓欣, 等. 海上换流站平台结构设计[J]. 中国海洋平台, 2024, 39(4): 86-92.
Qin Kang, Cao Yu, Lu Yuxin, et al. Structural design of offshore converter station platform[J]. China Offshore Platform, 2024, 39(4): 86-92.
[10] Tang Yuan, Chen Minjie, Ran Li. A compact MMC submodule structure with reduced capacitor size using the stacked switched capacitor architecture[J]. IEEE Transactions on Power Electronics, 2016, 31(10): 6920-6936.
[11] Li Rui, Fletcher J E, Xu Lie, et al. Enhanced flat- topped modulation for MMC control in HVDC transmission systems[J]. IEEE Transactions on Power Delivery, 2017, 32(1): 152-161.
[12] 董鹏, 蔡旭, 吕敬. 大幅减小子模块电容容值的MMC优化方法[J]. 中国电机工程学报, 2018, 38(18): 5369-5380.
Dong Peng, Cai Xu, Lü Jing. Optimized method of MMC for greatly reducing the capacitance of the submodules[J]. Proceedings of the CSEE, 2018, 38(18): 5369-5380.
[13] Mishra R, Vaghasiya K M, Agarwal V. A high voltage gain capable MMC for offshore wind farms: frequency component analysis and minimization of capacitor voltage ripple[J]. IEEE Transactions on Industrial Electronics, 2022, 69(12): 11957-11967.
[14] Li Rui, Adam G P, Holliday D, et al. Hybrid cascaded modular multilevel converter with DC fault ride- through capability for the HVDC transmission system[J]. IEEE Transactions on Power Delivery, 2015, 30(4): 1853-1862.
[15] Yang Heya, Fan Shiyuan, Dong Yufei, et al. Arm phase-shift conducting modulation for alternate arm multilevel converter with half-bridge submodules[J]. IEEE Transactions on Power Electronics, 2021, 36(5): 5223-5235.
[16] 高玉华, 王琛, 王毅, 等. 基于半波交替的轻型化MMC拓扑及控制策略[J]. 电力系统自动化, 2023, 47(17): 149-159.
Gao Yuhua, Wang Chen, Wang Yi, et al. Topology and control strategy of light-weight modular multi- level converter with half-wave alternating[J]. Auto- mation of Electric Power Systems, 2023, 47(17): 149-159.
[17] Hassan Z, Watson A J, Tardelli F, et al. A switched mid-point modular multilevel converter for HVDC applications[J]. IEEE Transactions on Power Delivery, 2023, 38(3): 1534-1547.
[18] Patro S K, Shukla A. Control and derived topologies of parallel hybrid converter[J]. IEEE Transactions on Industry Applications, 2021, 57(1): 598-613.
[19] Wickramasinghe H R, Konstantinou G, Li Zixin, et al. Alternate arm converters-based HVDC model com- patible with the CIGRE B4 DC grid test system[J]. IEEE Transactions on Power Delivery, 2018, 34(1): 149-159.
[20] 张建坡, 赵成勇. 模块化多电平换流器环流及抑制策略研究[J]. 电工技术学报, 2013, 28(10): 328-336.
Zhang Jianpo, Zhao Chengyong. Research on circu- lation current and suppressing strategy of modular multilevel converter[J]. Transactions of China Elec- trotechnical Society, 2013, 28(10): 328-336.
[21] Reddy G A, Shukla A. Circulating current optimi- zation control of MMC[J]. IEEE Transactions on Industrial Electronics, 2021, 68(4): 2798-2811.
[22] Wang Yi, Zhang Zhen, Xu Yutao, et al. Topology and control of an arm multiplexing MMC with full-range voltage regulation[J]. IEEE Transactions on Power Electronics, 2024, 39(12): 16135-16151.
[23] 王琛, 陶建业, 王毅, 等. 桥臂复用型模块化多电平换流器的拓扑及控制研究[J]. 中国电机工程学报, 2022, 42(9): 3373-3385.
Wang Chen, Tao Jianye, Wang Yi, et al. Research on topology and control of arm multiplexing modular multilevel converter[J]. Proceedings of the CSEE, 2022, 42(9): 3373-3385.
[24] 李宇薇, 王毅, 高玉华, 等. 桥臂复用模块化多电平变流器单极接地故障无闭锁穿越及能量均衡[J]. 电工技术学报, 2025, 40(1): 190-202.
Li Yuwei, Wang Yi, Gao Yuhua, et al. Pole-to-ground fault riding-through and energy balance of arm- multiplexing modular multilevel converter[J]. Transa- ctions of China Electrotechnical Society, 2025, 40(1): 190-202.
[25] 阎发友, 汤广福, 贺之渊, 等. 一种适用于模块化多电平换流器的新型环流控制器[J]. 电力系统自动化, 2014, 38(1): 104-108, 120.
Yan Fayou, Tang Guangfu, He Zhiyuan, et al. A novel circulating current controller for modular multilevel converter[J]. Automation of Electric Power Systems, 2014, 38(1): 104-108, 120.
[26] Moon J W, Kim C S, Park J W, et al. Circulating current control in MMC under the unbalanced voltage[J]. IEEE Transactions on Power Delivery, 2013, 28(3): 1952-1959.
[27] 伍小杰, 杨超, 公铮, 等. 基于多谐振控制器的MMC简化环流抑制策略[J]. 电工技术学报, 2016, 31(13): 74-81.
Wu Xiaojie, Yang Chao, Gong Zheng, et al. Simplified circulating current suppressing strategy for MMC based on multi-resonant controller[J]. Transa- ctions of China Electrotechnical Society, 2016, 31(13): 74-81.
[28] Li Jianguo, Zhao Xiongguang, Song Qiang, et al. Loss calculation method and loss characteristic analysis of MMC based VSC-HVDC system[C]//2013 IEEE International Symposium on Industrial Electronics, Taipei, China, 2013: 1-6.
[29] 屠卿瑞, 徐政, 管敏渊, 等. 模块化多电平换流器环流抑制控制器设计[J]. 电力系统自动化, 2010, 34(18): 57-61, 83.
Tu Qingrui, Xu Zheng, Guan Minyuan, et al. Design of circulating current suppressing controllers for modular multilevel converter[J]. Automation of Electric Power Systems, 2010, 34(18): 57-61, 83.
Abstract The modular multilevel converter (MMC), characterized by its modularity, superior waveform quality, and scalability, has emerged as a pivotal topology in flexible high-voltage direct current (HVDC) transmission systems. However, its large-scale deployment on offshore platforms and in urban grid interconnections is hindered by excessive volume and weight, primarily due to cascaded submodules (SMs). Hybrid MMC topologies that integrate device series connection and SM cascading have emerged as promising solutions for enhancing power density. Nevertheless, the energy balance challenge caused by segmented sinusoidal waveforms and current-path switching in such topologies severely limits their engineering viability. Traditional energy-balancing approaches, including arm voltage control and harmonic current injection, have significant drawbacks: limited voltage regulation ranges, increased hardware complexity, and reduced efficiency. This study focuses on the arm-multiplexing MMC (AM-MMC), a lightweight topology with relatively good performance, to address these limitations through circulating-current-optimized energy-balancing control.
Firstly, a high-dimensional dynamic model based on arm equivalent modulation (AEM) strategy is established to express the time-varying coupling effects inherent to AM-MMC’s multiplexed arm operation. The model elucidates the mechanism of circulating current generation through precise analysis of submodule capacitor voltage components, the nonlinear characteristics of dynamic switching functions, and multi-frequency harmonic voltage-current interactions. Secondly, the energy balance and the quantitative characterization of circulating current involvement in energy balance processes are analyzed. With retaining the second-harmonic component of the circulating current for simplified control, a fundamental characteristic of the AM-MMC is identified. That is, the minimum required amplitude of the second-harmonic circulating current maintains a constant proportion with the DC-side current when the modulation ratio is held constant. Then, a methodology is established to determine this proportionality coefficient across different modulation ratios. Finally, a control strategy for circulating current optimization is proposed. Given the complexity of calculating proportionality coefficients, an offline coefficient configuration is adopted to ensure the dynamic performance of the proposed strategy. However, due to the linearization and averaging approximations in the mathematical modeling process, the theoretically derived coefficients inevitably contain certain inaccuracies. To further improve control precision, an online optimization section is introduced. This section integrates the submodule capacitor’s voltage feedback with a PI controller to optimize real-time coefficients, and a PIR controller regulates the circulating current.
A cross-scale verification platform is developed, including an 85 MV·A/±35 kV simulation system and a 3.2 kV·A/±150 V hardware prototype. The following conclusions can be drawn. (1) The proposed strategy achieves optimal coordination between energy balance and circulating current suppression, while addressing the limitations of additional hardware requirements and voltage regulation constraints. (2) By the dominant harmonic component regulation with offline-predetermined coefficients and online optimization, this approach ensures dynamic stability and a wide voltage regulation range with minimal trade-offs in scenarios like offshore wind farm integration, where a lightweight topology is required. Thus, an economically viable and efficient engineering solution can be offered. (3) Beyond specific implementations, the developed methodology establishes a universal framework for lightweight topologies. As an inherent characteristic of MMCs, the circulating current enables facile control without additional hardware requirements for energy balance control.
keywords:Modular multilevel converter (MMC), lightweight design, arm-multiplexing, circulating current optimization, energy balance control
DOI: 10.19595/j.cnki.1000-6753.tces.250621
中图分类号:TM721.1
国家自然科学基金(52077079)和河北省自然科学基金(E2021502048)资助项目。
收稿日期 2025-04-14
改稿日期 2025-05-28
张 振 男,1997年生,博士研究生,研究方向为柔性直流输电。E-mail: zhen.zhang@ncepu.edu.cn
王 毅 男,1977年生,教授,博士生导师,研究方向为新能源与储能构网控制、柔性直流输配电网拓扑与控制。E-mail: yi.wang@ncepu.cn(通信作者)
(编辑 郭丽军)