 (1)
(1)
摘要 由于优异的容错性能,双三相永磁同步电机(DTP-PMSM)在多电飞机和电动汽车等领域得到了广泛关注。针对缺相容错运行,可通过构建降阶解耦变换矩阵和降阶解耦模型实现磁场定向控制,但面对任一缺相故障,该方法较为复杂且无法与正常工况实现柔性衔接。为此,该文提出一种自然解耦缺相容错控制优化方法,即沿用正常模式矢量控制技术,结合容错电流、容错电压和中性点电压配置,实现最多任意三相开路容错控制。具体地,针对自然解耦变换线性无关基底的容错电流配置,结合剩余相电流等幅值与定子铜耗最小约束进行求解;针对线性相关基底的容错电压配置,提出了一种依据谐波/零序空间电流模型的优化设置方法;针对不平衡供电模式,提出一种中性点电压计算与补偿方法。从上述三个层面结合可控自由度限制,对共中性点双三相电机的缺相容错控制进行性能优化。最后对单相、两相和三相开路进行容错控制实验,验证了所提方法的有效性和可行性。
关键词:双三相永磁同步电机 缺相自然容错控制 容错电流 容错电压 中性点电压
随着在航空航天、船舶驱动,电动汽车和高功率工业设备等现代工业上应用,电机驱动系统正在经历一个快速发展的阶段[1-4],对功率容量和可靠性的要求越来越高,与传统三相电机系统相比,相移30°的双三相永磁同步电机(Dual Three-Phase Per- manent Magnet Synchronous Motor, DTP-PMSM)具有可靠性高、功率容量大和转矩脉动低等优点,因此得到了广泛研究[5-6]。
据统计可知,多相电机驱动系统中约38%的故障是由功率器件故障引起的[7-8]。其故障类型通常分为开路故障和短路故障,而在多数情况下可以通过故障隔离的方法转化为开路故障,因此在开路故障时的有效容错控制备受关注[9-10]。目前,双三相永磁同步电机的容错策略以容错控制算法优化为主,不需要额外的硬件,工业实用性强。例如,通过改进控制算法,如故障检测、故障诊断与实时补偿等手段[11-12],来保证电机在出现故障后的稳定运行,确保系统能够持续运行,最大限度地减少性能下降[13],其具有优越的灵活性,成为研究热点。本文中采用与文献[14]类似的方法,即选取共模电流的特征量,这个电流反映了六相电机的不平衡情况,进而反映了电机的健康状况。
大部分研究集中在最大化地利用健康相电流配置,以提高容错能力,最有效的方法则是仅切除故障相,并利用剩余健康相产生转矩[15-16],能有效发挥双三相永磁同步电机的多相冗余特性,是最优的控制策略。为实现开路故障时DTP-PMSM驱动系统的磁场定向控制,学者杨金波等提出基于降阶解耦模型的容错控制策略[17],并成为研究热点。在控制器设计层面,需基于重构后的数学模型构建新型容错电流分配算法,并同步优化相调制策略以维持系统稳定运行。其缺点是在使用此类控制策略时需针对任一相故障,构建不同的降阶解耦变换矩阵与降阶解耦模型策略[18-19],还需要结合精密的故障诊断技术,确保控制策略能够从自然解耦控制模式切换到故障时的降阶解耦容错控制模式。因此,为应对任一相故障,需要多次建模,从工程化角度考虑,该方法并不简易。
为此,西班牙学者M. J. Durán等提出了一种沿用正常模式解耦变换的容错控制策略,即本文所说的自然容错控制,并得到了越来越多的关注[20],其优点是避免了重新解耦建模。此后,文献[21]也沿用了这种自然解耦缺相容错控制策略。然而,由于控制自由度下降问题,不同平面的电流配置不再解耦,即出现线性相关问题,因此需要根据ab平面电流情况对xy子平面的参考电流进行调整。文献[22]则采用谐波空间电流的通用形式以解决基波空间电流与谐波电流耦合的问题,但未考虑电机驱动系统输出电压与电机实际电压出现的偏差,解耦方程中出现了二倍频的分量导致电机的转矩脉动。文献[23]提出了考虑电压约束时基于正常解耦变换矩阵容错控制方式,弥补了前者没有考虑开路故障时电压约束产生的影响,但没有涉及中性点电压波动产生的影响。在双三相永磁同步电机发生开路故障时,系统的约束条件增加,导致系统自由度减少,同时引发系统方程的多解性问题。在此背景下,容错控制策略的优化设计转化为带约束条件的多目标优化问题[24]。综上所述,当前双三相电机容错控制的研究多集中于容错电流配置问题,而针对线性相关基底的容错电压设置尚未得到有效优化,同时不平衡供电条件下的中性点电压波动机理也尚未明确建立。
本研究针对应用广泛的两套三相绕组互差30°的非对称共中性点双三相电机(以下称为双三相电机),为了达到其与健康模式下保持性能不变的目的,提出了一种自然解耦缺相容错控制优化方法,即基于健康模式的解耦变换,结合相电流等幅值和铜损最小约束,给出了一种较为简单的容错电流配置方法。进而,考虑了可控自由度降低的问题,结合谐波/零序空间模型,提出了一种线性相关基底容错电压配置方法;对缺相故障下中性点电压进行建模,给出一种依据开路相反电动势与开路相参考电压模型的中性点电压补偿方法。本文方法涵盖了单相、两相、三相缺相容错控制,由于沿用自然解耦变换矩阵,因此存在易于工程化的优点。最后,通过实验结果验证理论推导的正确性与所提控制策略的有效性。
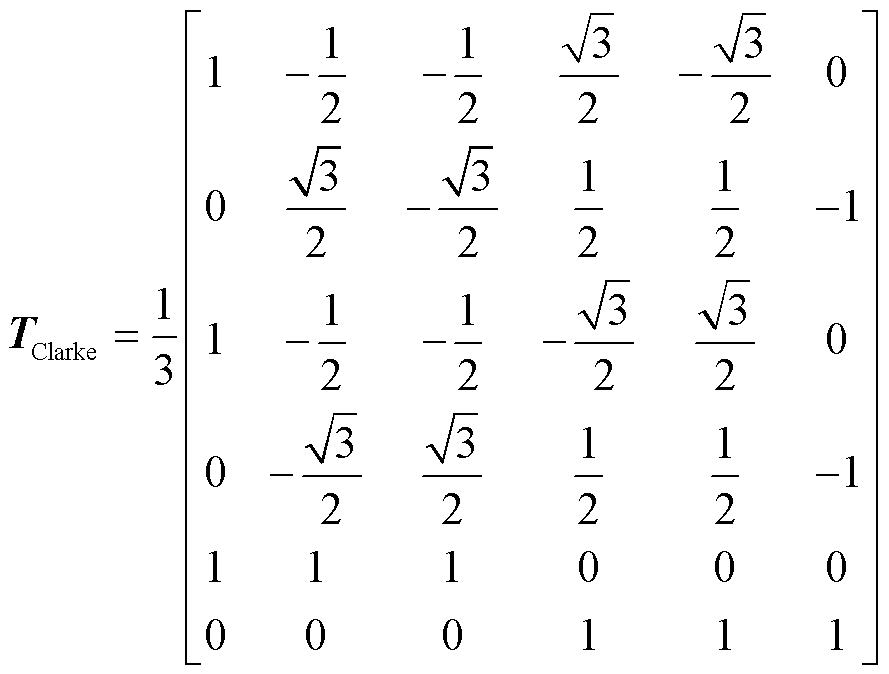
非对称双三相电机的两套三相绕组在空间上互差30°,一般采用矢量空间解耦(Vector Space Decomposition, VSD)变换矩阵进行解耦控制,将自然坐标系下的变量映射到:ab、xy和o1o2相互正交的3个子空间。其中,Clarke变换和Park变换矩阵可表示为
(1)
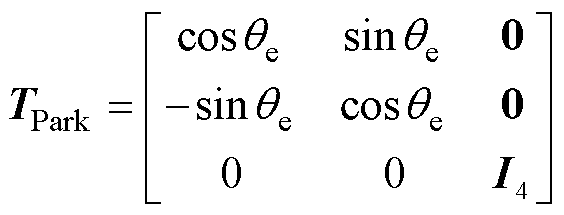 (2)
(2)
式中,qe为电机电角度;I4为4阶单位矩阵。
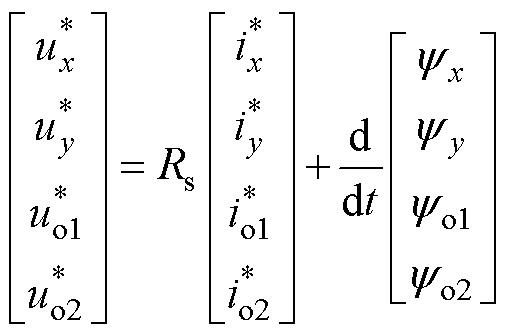
通过VSD坐标变换,可以将自然坐标系中的各个变量转变到同步旋转坐标系,对于DTP-PMSM,其旋转坐标系下解耦的电压方程和磁链方程为
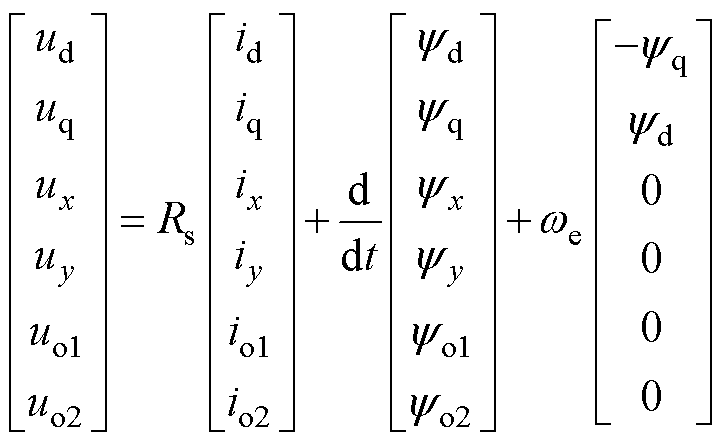 (3)
(3)
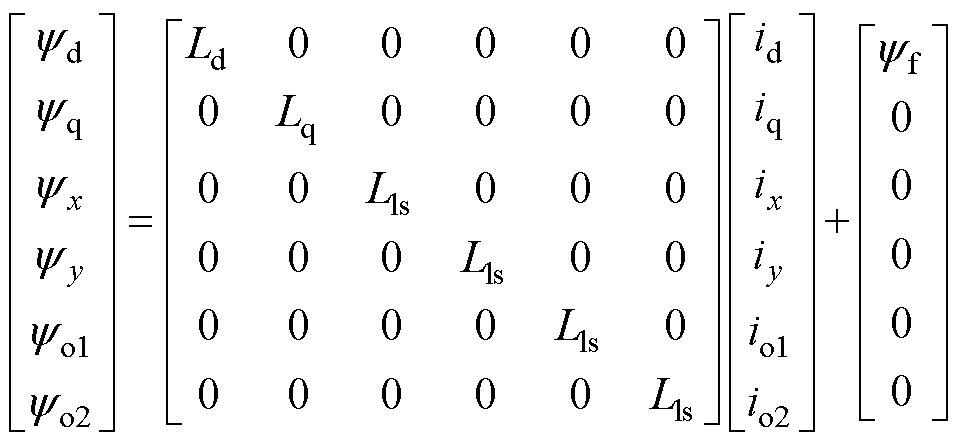 (4)
(4)
式中,ud, uq、ux, uy、uo1, uo2为对应各平面的电压投影;id, iq、ix, iy、io1, io2为对应平面的电流投影;yd, yq、yx, yy、yo1, yo2为对应磁链;Rs为定子电阻;we为同步电角频率;yf为永磁体磁链幅值;Ld和Lq分别为d轴和q轴电感;Lls为定子漏电感。
双三相电机电磁转矩方程可表示为
 (5)
(5)
式中,Te为电机输出的电磁转矩;p为极对数。
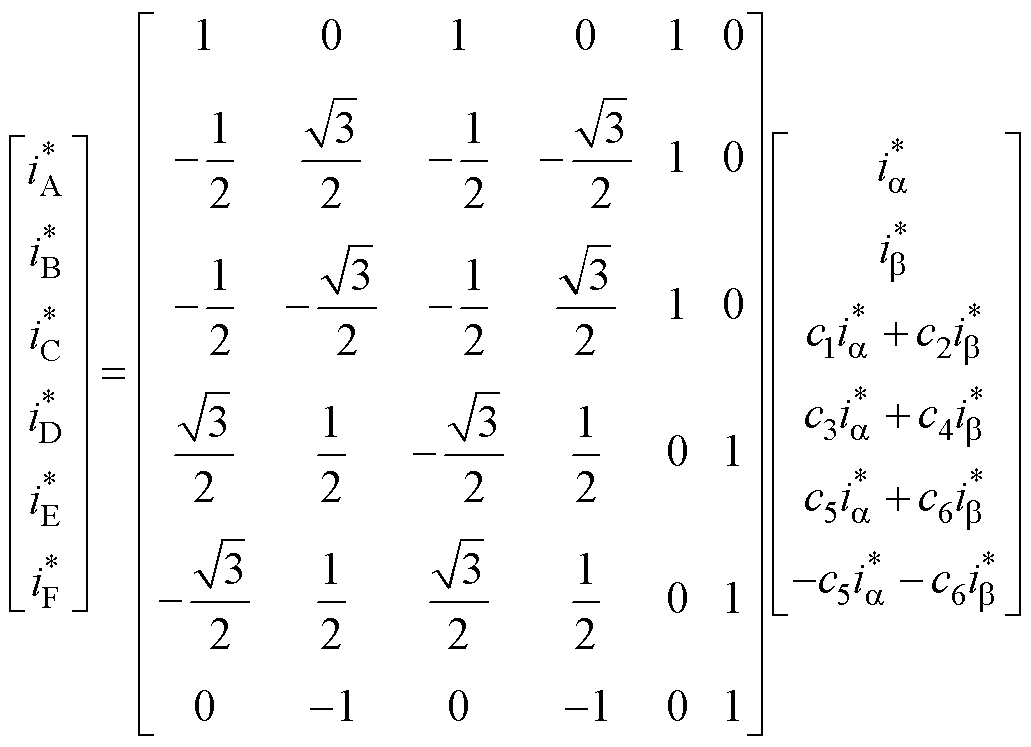
在一相开路故障下运行时,基波子平面和谐波子平面的电流会发生耦合,此时基波子平面和谐波子平面呈现线性相关性[22]。由于仅有ab子空间与能量转换有关,在容错控制方面,必须优先保证ab子空间电流形成圆形定子磁动势并且保持容错前后的转矩不变。在缺相容错控制模式下,选择Clarke变换的变量作为线性无关基底。此时谐波电流和零序电流可表示成a和b对应行向量的线性组合,有
 (6)
(6)
式中, 、
、 、
、 和
和 为对应空间电流的参考值;
为对应空间电流的参考值; 和
和 为ab子空间的参考电流;上标“*”表示参考值;ci(i=1~6)为待求解系数,由开路相数所决定,可通过施加相电流等幅值和铜损最小等约束求解。本文考虑多达三相开路故障,建立自然解耦缺相容错控制框图,如图1所示。图1中,Sx、Sy、So1为对应电流环的开关状态,S=1表示开关闭合,S=0表示开关断开,TA~TF为逆变器各相的开关函数,T=1表示上管开通,T=0表示下管开通,ia~if为相电流。
为ab子空间的参考电流;上标“*”表示参考值;ci(i=1~6)为待求解系数,由开路相数所决定,可通过施加相电流等幅值和铜损最小等约束求解。本文考虑多达三相开路故障,建立自然解耦缺相容错控制框图,如图1所示。图1中,Sx、Sy、So1为对应电流环的开关状态,S=1表示开关闭合,S=0表示开关断开,TA~TF为逆变器各相的开关函数,T=1表示上管开通,T=0表示下管开通,ia~if为相电流。
共中性点双三相PMSM的可控自由度(Degree of Freedom, DOF)可表示为DOF=n-1,其中n为健康相的数量。因此,正常模态下双三相PMSM的DOF=5,正常模态下为适应DOF=5的限制io2不予控制,在图1中令Sx=1、Sy=1、So1=1。同时 设置为0。当双三相电机发生单相开路故障时,电机故障相的相电流被强制为0,相当于多出了一个电流约束,并导致电机的DOF由5降低至4,因此,在控制算法的维度设计上,有必要去除一个电流控制环路,以防止在开路故障模式下出现过度驱动的情况。以F相故障为例,关闭F相桥臂驱动信号,以隔离故障源,为适应可控自由度的要求而降低自由度,io1、io2不予控制,即令图1中Sx=0、Sy=0、So1=0。针对任意相故障,只需更新ci系数即可。当出现更多相故障时,依据上述原则,依次减少电流闭环数量,可实现可控自由度重新匹配。
设置为0。当双三相电机发生单相开路故障时,电机故障相的相电流被强制为0,相当于多出了一个电流约束,并导致电机的DOF由5降低至4,因此,在控制算法的维度设计上,有必要去除一个电流控制环路,以防止在开路故障模式下出现过度驱动的情况。以F相故障为例,关闭F相桥臂驱动信号,以隔离故障源,为适应可控自由度的要求而降低自由度,io1、io2不予控制,即令图1中Sx=0、Sy=0、So1=0。针对任意相故障,只需更新ci系数即可。当出现更多相故障时,依据上述原则,依次减少电流闭环数量,可实现可控自由度重新匹配。

图1 自然容错控制下矢量控制框图
Fig.1 Block diagram of vector control under natural fault-tolerant control
2.1.1 优化原则一:定子电流幅值相等
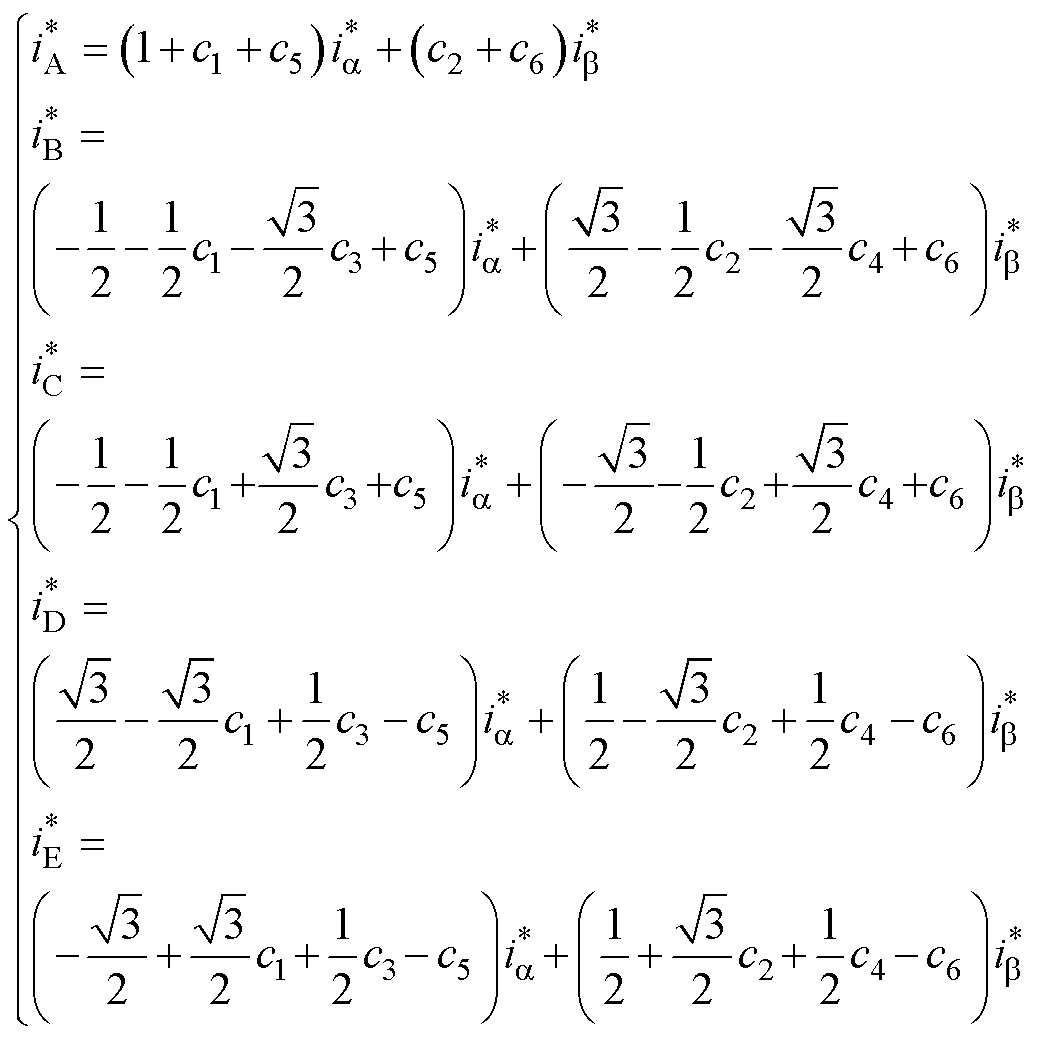
由式(1)的逆矩阵和式(6)可得各相电流与和的数学表达式为
 (7)
(7)
式中, ~
~ 为各相电流的参考电流。由于F相开路,存在电流约束
为各相电流的参考电流。由于F相开路,存在电流约束 。由式(7)可得,电流的一般化表达式为
。由式(7)可得,电流的一般化表达式为
 (8)
(8)
由于和是两个相互正交的变量,因此可得
 (9)
(9)
剩余相电流实际给定值可由式(7)可得
 (10)
(10)
附加以A、B、C、D、E相电流等幅值为约束,可得方程为
 (11)
(11)
式中, ~
~ 为各相电流的幅值。采用数值求解软件,如Matlab软件,可求解c1~c6,但得出的解非唯一性,为获得唯一解,还需施加额外约束条件。
为各相电流的幅值。采用数值求解软件,如Matlab软件,可求解c1~c6,但得出的解非唯一性,为获得唯一解,还需施加额外约束条件。
2.1.2 优化原则二:定子铜耗最小
在定子电流幅值相等这一主要原则下,通常会得到多组解,此时可通过施加定子铜损最小约束,以获得最优解。电机总的定子铜耗可以表示为
 (12)
(12)
式中, 为矩阵
为矩阵 和
和 乘积的逆。考虑到xy和o1o2子空间内的电流与参数c1~c6相关联,因此定子铜耗最小方式的约束条件可简化为
乘积的逆。考虑到xy和o1o2子空间内的电流与参数c1~c6相关联,因此定子铜耗最小方式的约束条件可简化为
 (13)
(13)
将目标一所得的解遍历代入式(13),即可得到最优解。即当F相发生缺相时,优化后的电流需满足剩余健康相电流幅值相等及定子铜耗最小的原则。谐波电流和零序电流可表示成和的线性组合为
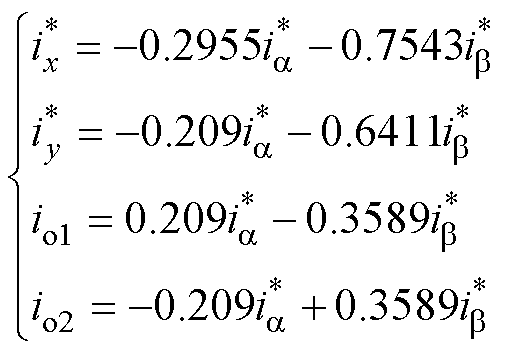 (14)
(14)
由此,可以从坐标变换逆矩阵式(7)计算出剩余正常相电流的实时表达式为
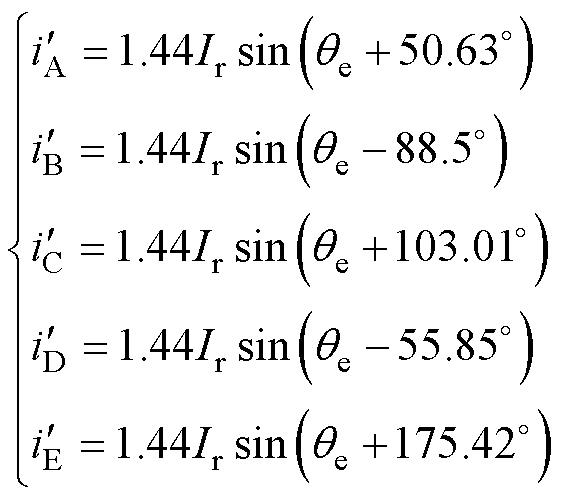 (15)
(15)
式中,Ir为额定值; ~
~ 为各相电流的实时电流。由式(15)可得幅值与额定值之间关系为
为各相电流的实时电流。由式(15)可得幅值与额定值之间关系为
 。以上讨论的是F相单相绕组开路的情况,当其他单相发生断相时,采用相同的方法可得出参考系数。表1给出了任意单相发生断相时谐波空间电流配置系数。
。以上讨论的是F相单相绕组开路的情况,当其他单相发生断相时,采用相同的方法可得出参考系数。表1给出了任意单相发生断相时谐波空间电流配置系数。
表1 单相故障时谐波与零序空间电流配置系数
Tab.1 Harmonic and zero-sequence space current configuration coefficients during single-phase faults
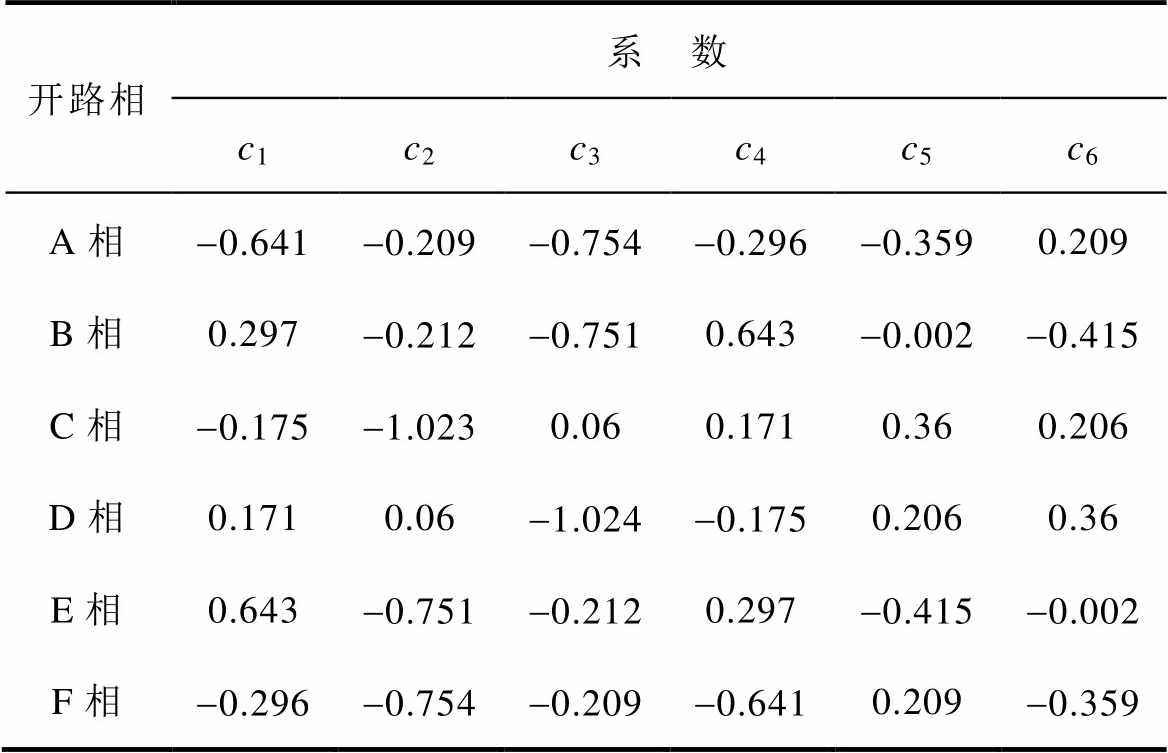
开路相系 数 c1c2c3c4c5c6 A相-0.641-0.209-0.754-0.296-0.3590.209 B相0.297-0.212-0.7510.643-0.002-0.415 C相-0.175-1.0230.060.1710.360.206 D相0.1710.06-1.024-0.1750.2060.36 E相0.643-0.751-0.2120.297-0.415-0.002 F相-0.296-0.754-0.209-0.6410.209-0.359
尽管单相开路时io1和io2不再进行闭环控制,然而这并不意味着零序空间的电压可直接设定为0。由式(3)所示的零序环路模型可知,零序空间电压处于受迫运动状态且满足
 (16)
(16)
故障模式下零序空间电压 和应依据式(16)进行设置,其中电流
和应依据式(16)进行设置,其中电流 、
、 可对应零序空间电流参考,由式(6)计算。当没有出现故障时,认为
可对应零序空间电流参考,由式(6)计算。当没有出现故障时,认为 ,因此正常模式通常配置
,因此正常模式通常配置 和
和 。当发生更多相开路故障时,不再进行电流闭环控制的谐波空间电压,同样需依据谐波空间模型进行配置。
。当发生更多相开路故障时,不再进行电流闭环控制的谐波空间电压,同样需依据谐波空间模型进行配置。
正常模式下,认为中性点电压不存在波动,逆变器相电压等于调制电压。而在单相开路的情况下,中性点电压产生波动,这可能会使得控制器产生的控制信号无法准确地传到电机终端。根据文献[23]可知,当出现单相开路故障时采用基于正常解耦变换自然容错控制dq轴电流会出现2次谐波,其表达式为
 (17)
(17)
式中,Iq为基波电流的幅值;Id2、Iq2为2次谐波电流的幅值;jd2、jq2为2次谐波电流的相位。由于dq轴电流的波动导致相电流基波幅值受到影响,将开路故障后该相视为电压约束而产生影响,并通过补偿电压约束从而保证电机的容错性能,但该方法没有考虑到中性点电压波动的影响,且建模和分析较为复杂。目前,基于健康解耦矩阵的容错策略基本忽略了单相开路后的中性点电压波动产生的影响,从而容错后相电流始终无法满足式(15),导致电机电流控制性能的下降。因此,有必要构建中性点电压模型,并设计相应的补偿策略以抑制电压波动对系统性能的不利影响。
本文中采用一种简易的故障诊断方法,运用类似文献[14]中所提方法,根据式(18)计算所得的共模电流io的特征量,依据共模电流的直流分量、基波分量及谐波分量便可判断哪一相发生了开路故障。
 (18)
(18)
正常模式下的相电流与共模电流波形如图2所示。这个电流反映了六相驱动器的平衡情况,进而反映了它的健康状况。因此,可以利用io进行故障诊断,提出了利用可测相电流产生零序信号的方法。
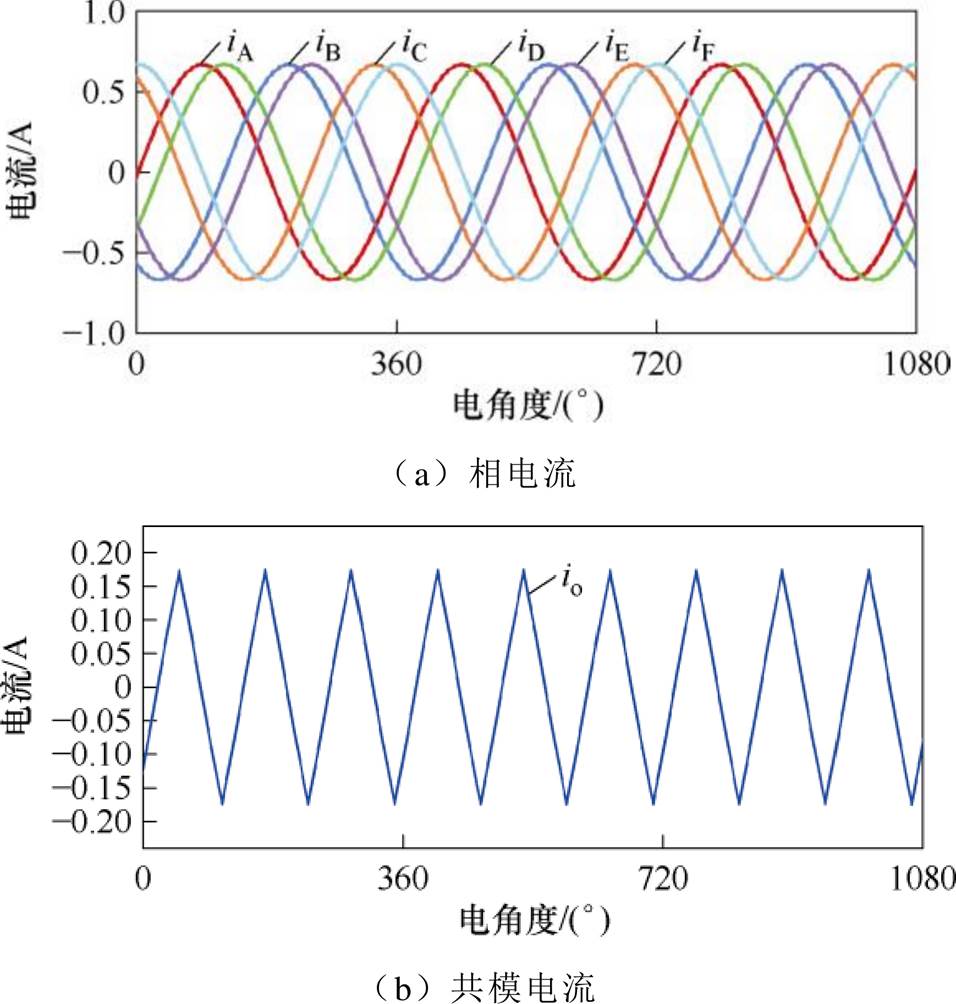
图2 正常模式下的相电流与共模电流波形
Fig.2 Phase current and common-mode current waveforms in normal mode
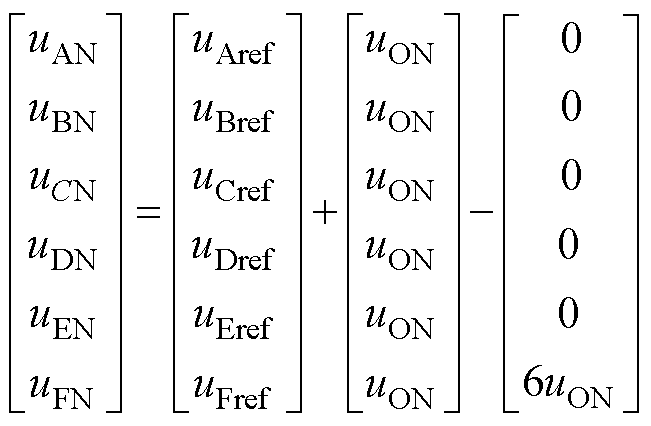
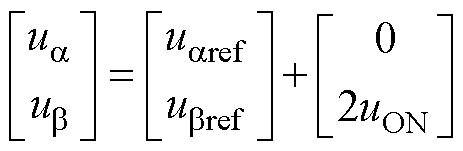
从控制层面而言,正常工况下六相逆变器输出的六相电压满足
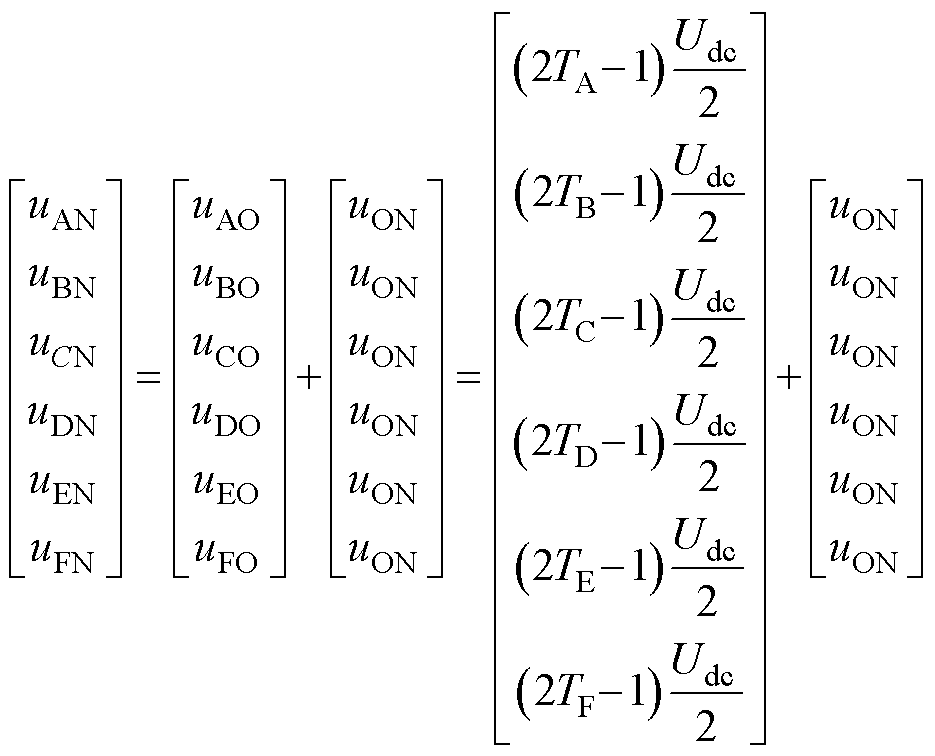 (19)
(19)
式中,uAN~uFN为逆变器各桥臂输出端相对双三相电机中性点的电压;uAO~uFO为逆变器各桥臂输出端相对逆变器直流母线中点的电压;uON为逆变器直流母线中点相对双三相电机;Udc为直流母线电压。
当电机出现开路故障时,根据双三相电机的数学模型,可计算出逆变器相电压需要满足
 (20)
(20)
在沿用正常模式解耦变换矩阵下,参考电压满足
 (21)
(21)
式中,uAref~uFref为各相相电压参考值。当电机F相发生开路故障后仅满足
 (22)
(22)
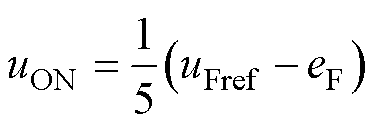
整理式(19)~式(22)可得中性点电压uON为
 (23)
(23)
由式(23)可知,此时中性点电压的波动主要由逆变器输出的故障相电压uFN与参考相电压uFref的差值构成。其中,参考相电压uFref为F相的参考电压,但其不受脉宽调制控制。该参考电压由Clarke和Park逆变换计算而得,属于计算量。uFN为电机实际电压,当考虑开路工况时,uFN可用其反电动势eF取代。
电机系统的实际电压、参考电压和中性点电压存在如下关系。
 (24)
(24)
将式(23)代入式(24)可得
 (25)
(25)
由于仅有基波空间电流参与机电能量转换,因此仅在基波空间电压中进行补偿,将式(25)两边同时进行Clarke变换可得
 (26)
(26)
电机开路相电压uFN可表示为
 (27)
(27)
当忽略相间互感时,uFN可由反电动势 替代,其计算式为
替代,其计算式为
 (28)
(28)
因此,中性点电压可由式(23)改写为
 (29)
(29)
综上所述,鉴于自然解耦缺相容错控制下电机系统存在可控自由度降低的问题,需去除io1闭环,且对uo1、uo2仅实施容错电压补偿;同时,通过反电动势对中性点电压进行补偿,即可实现系统的容错控制,其原理框图如图3所示。其中,uo1、uo2的配置方法参考式(16)。
对于两相开路情况,电机的可控自由度(DOF)由5维降低至3维。不失一般性,以B相和F相同时开路为例进行说明。此时DOF=3,为适应DOF再次降低工况,iy、io1、io2不予控制,即令图1中Sx=1、Sy=0、So1=0。
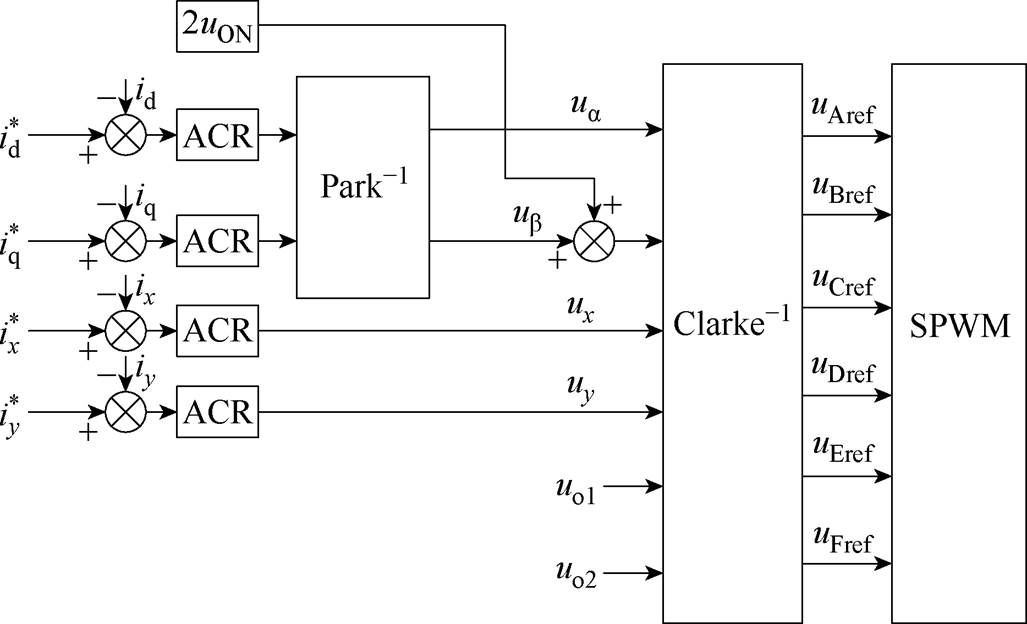
图3 F相开路中性点电压补偿方法原理框图
Fig.3 Principle block diagram of F-phase open neutral voltage compensation method
针对剩余相电流需要达成的目标,建立如下约束:由于B相和F相同时开路,需满足iB=0和iF=0;结合ab子空间电流给定值满足的正交属性,由式(10)可得
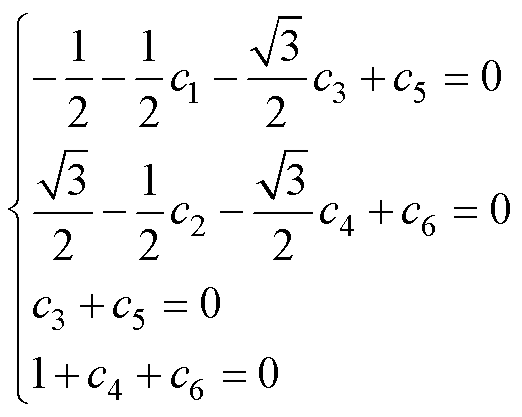 (30)
(30)
此时施加剩余相电流等幅值和铜损最小约束后,求得谐波电流和零序电流可表示成 和
和 的线性组合为
的线性组合为
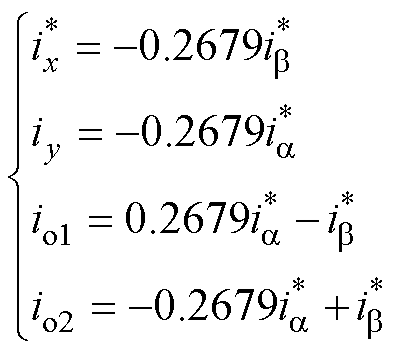 (31)
(31)
由此,从坐标变换逆矩阵式(7)可以计算出剩余相电流的表达式为
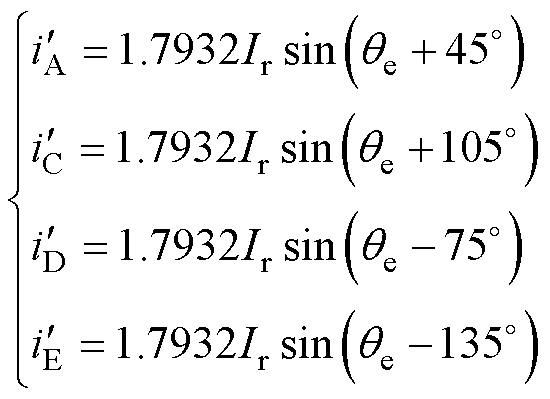 (32)
(32)
以上讨论的是B、F相两相绕组开路的情况,当其他两相发生断相时,采用相同的方法可得出参考系数。表2给出了其他任意两相开路时,两相故障时谐波空间电流配置系数,线性无关基底下的电流环参考值和容错电压配置可按照表2进行更新。
表2 两相故障时谐波与零序空间电流配置系数
Tab.2 Harmonic and zero-sequence space current configuration coefficients in two-phase faults
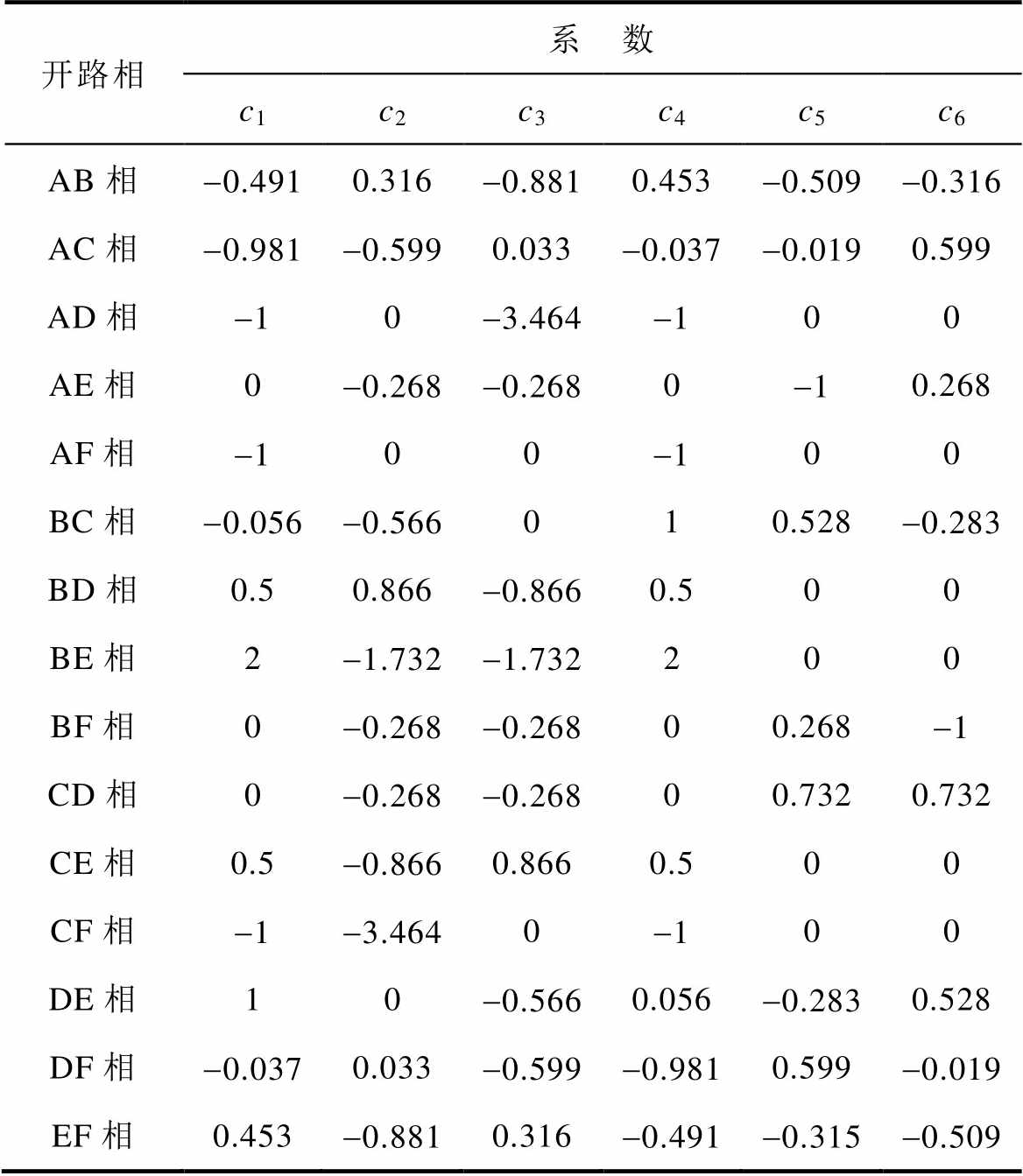
开路相系 数 c1c2c3c4c5c6 AB相-0.4910.316-0.8810.453-0.509-0.316 AC相-0.981-0.5990.033-0.037-0.0190.599 AD相-10-3.464-100 AE相0-0.268-0.2680-10.268 AF相-100-100 BC相-0.056-0.566010.528-0.283 BD相0.50.866-0.8660.500 BE相2-1.732-1.732200 BF相0-0.268-0.26800.268-1 CD相0-0.268-0.26800.7320.732 CE相0.5-0.8660.8660.500 CF相-1-3.4640-100 DE相10-0.5660.056-0.2830.528 DF相-0.0370.033-0.599-0.9810.599-0.019 EF相0.453-0.8810.316-0.491-0.315-0.509
对BF两相同时出现开路时需要进行的中性点电压补偿,类似地,中性点电压可以写为
 (33)
(33)
记为
 (34)
(34)
为适应可控自由度的变化,此时uy、 、
、 进行容错电压补偿,其补偿方法为
进行容错电压补偿,其补偿方法为
 (35)
(35)
BF两相开路后中性点电压补偿框图如图4所示。
针对三相开路情况,不失一般性,以A相、B相和F相同时开路为例进行说明。此时DOF=2,为适应DOF再次降低工况,ix、iy、io1、io2不予控制,即令图1中Sx=0、Sy=0、So1=0。
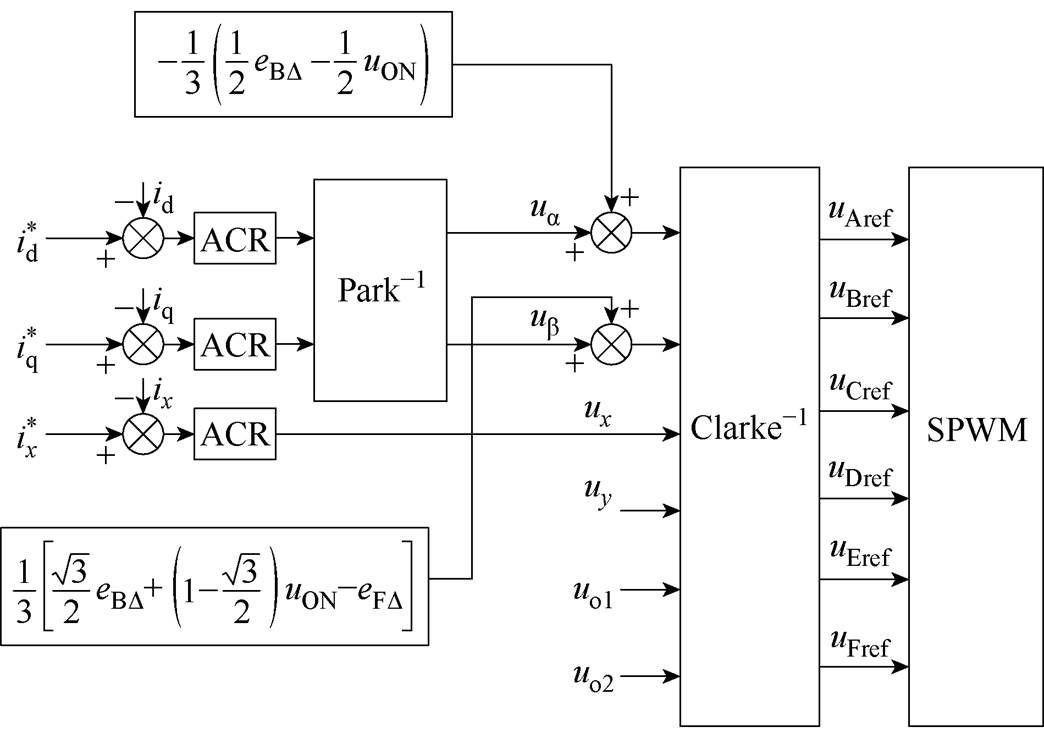
图4 BF两相开路中性点电压补偿方法原理框图
Fig.4 Principle block diagram of BF two-phase open neutral voltage compensation method
三相开路故障较为严重,不能满足剩余相电流等幅值约束,通过iA=0、iB=0、iF=0等约束,即可得到谐波电流和零序电流可表示成和的线性组合为
 (36)
(36)
由此,代入式(7)可以计算出剩余相电流的表达式为
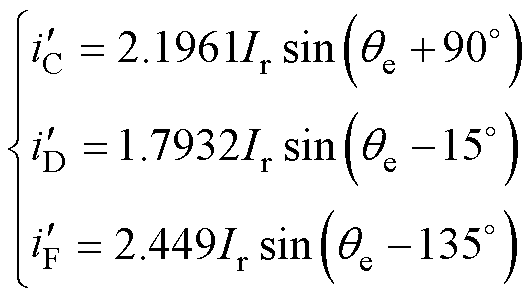 (37)
(37)
同理,其他任意三相开路时,三相故障时谐波空间电流配置系数见表3,线性无关基底下的电流环参考值和容错电压配置可按照表3进行更新。
对ABF三相同时出现开路时,中性点电压可以写为
 (38)
(38)
记为
 (39)
(39)
同理,此时ux, uy、uo1, uo2只进行容错电压配置,其补偿方法为
表3 三相故障时谐波与零序空间电流配置系数
Tab.3 Harmonic and zero-sequence space current configuration coefficients in three-phase faults
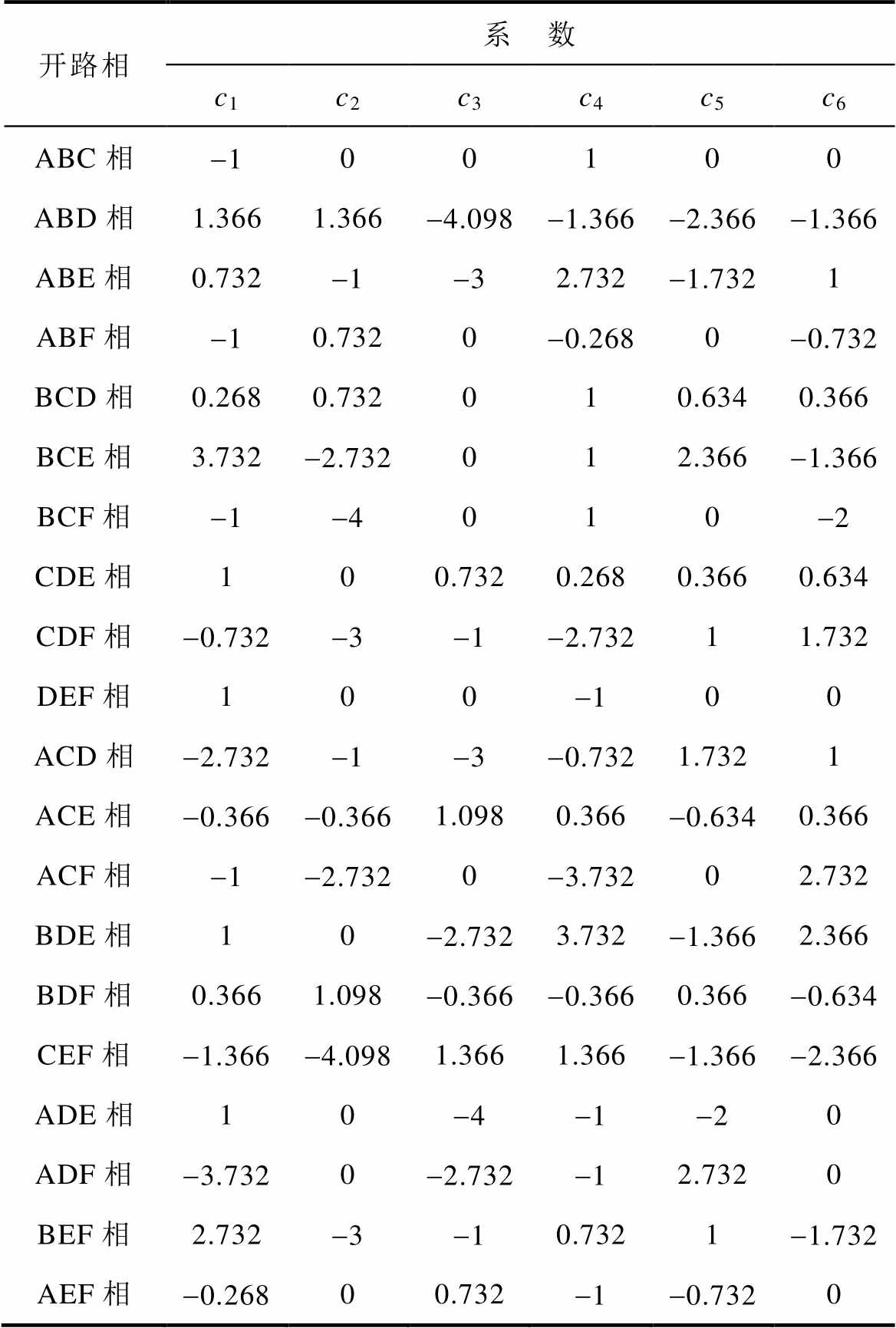
开路相系 数 c1c2c3c4c5c6 ABC相-100100 ABD相1.3661.366-4.098-1.366-2.366-1.366 ABE相0.732-1-32.732-1.7321 ABF相-10.7320-0.2680-0.732 BCD相0.2680.732010.6340.366 BCE相3.732-2.732012.366-1.366 BCF相-1-4010-2 CDE相100.7320.2680.3660.634 CDF相-0.732-3-1-2.73211.732 DEF相100-100 ACD相-2.732-1-3-0.7321.7321 ACE相-0.366-0.3661.0980.366-0.6340.366 ACF相-1-2.7320-3.73202.732 BDE相10-2.7323.732-1.3662.366 BDF相0.3661.098-0.366-0.3660.366-0.634 CEF相-1.366-4.0981.3661.366-1.366-2.366 ADE相10-4-1-20 ADF相-3.7320-2.732-12.7320 BEF相2.732-3-10.7321-1.732 AEF相-0.26800.732-1-0.7320
 (40)
(40)
ABF三相开路后中性点电压补偿方法如图5所示。
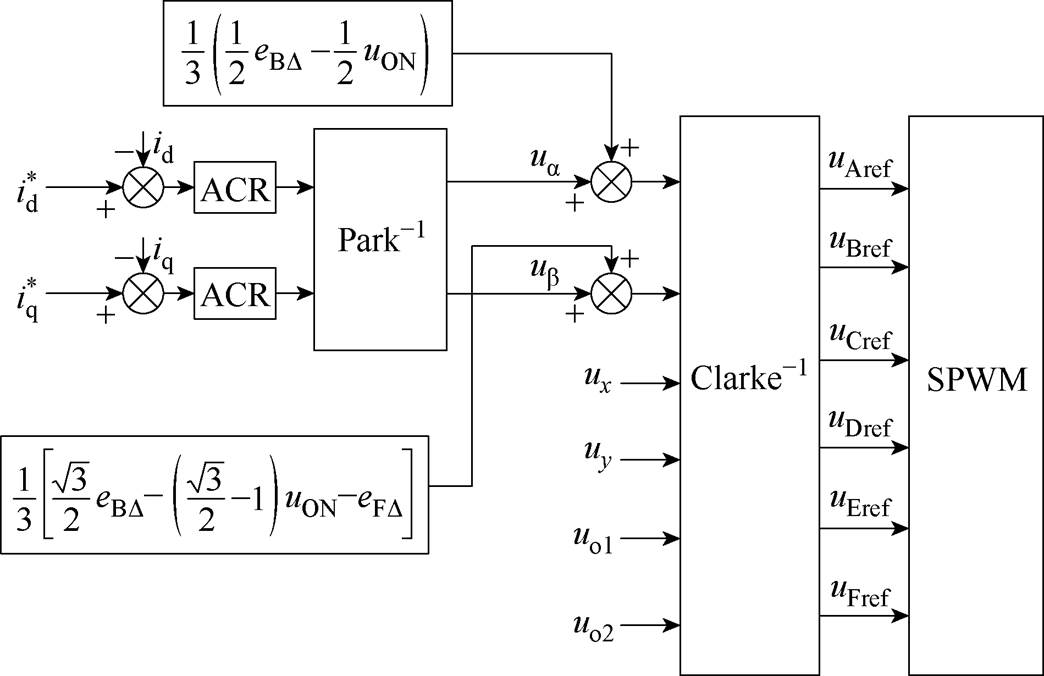
图5 ABF三相开路中性点电压补偿方法原理框图
Fig.5 ABF three-phase open neutral voltage compensation method principle block diagram
为了验证上述缺相故障下容错控制方法的正确性,在一台双Y相移30°的双三相永磁同步电机上进行实验验证,电机参数见表4,实验系统平台如图6所示,由一台三相永磁发电机(负载)、双三相PMSM实验样机、示波器、软件调试平台等构成。
表4 双三相PMSM参数
Tab.4 Dual three-phase PMSM parameters
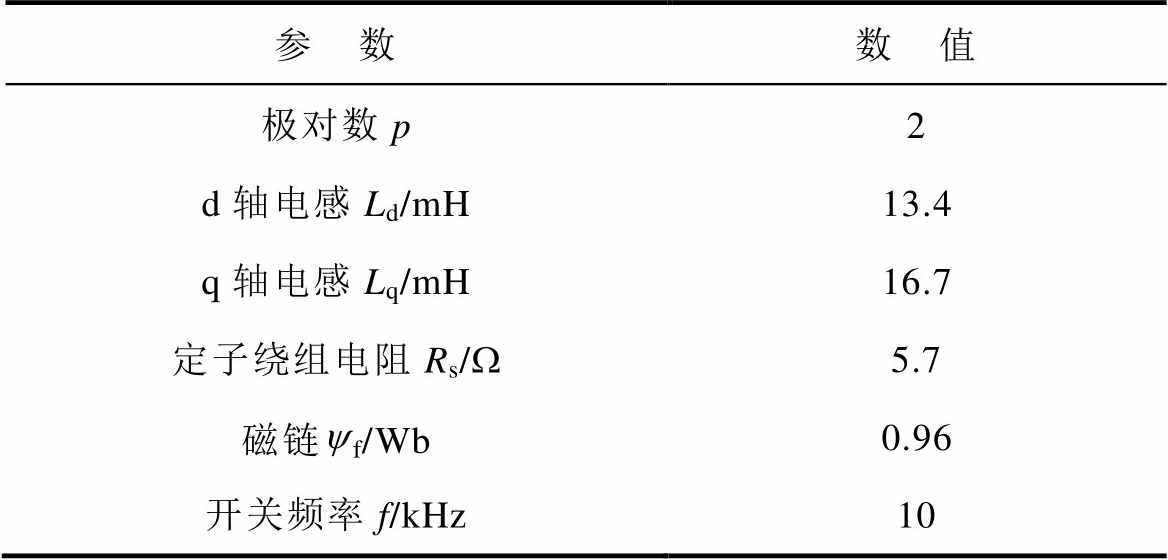
参 数数 值 极对数p2 d轴电感Ld/mH13.4 q轴电感Lq/mH16.7 定子绕组电阻Rs/W5.7 磁链yf/Wb0.96 开关频率f/kHz10
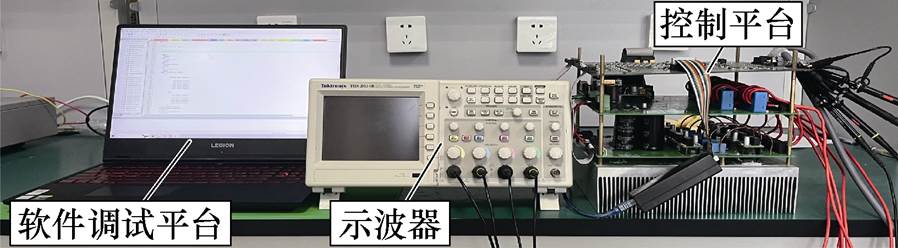
(a)驱动控制平台
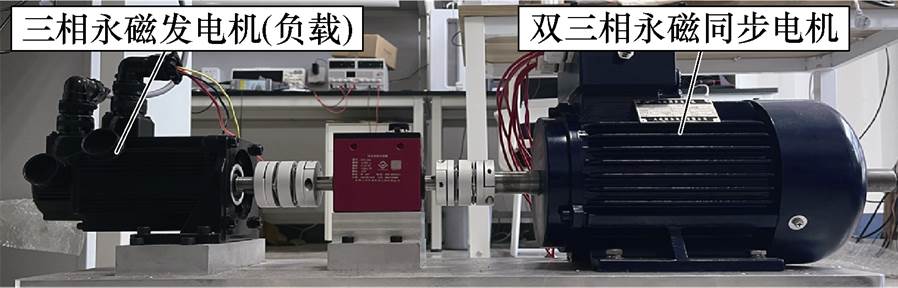
(b)电机测试平台
图6 实验系统平台
Fig.6 Experimental system platform
在既定的控制结构中,外部闭环由速度控制器组成,其输出随后传输至内部电流闭环。图7展示了正常运行模式下电机相电流和转速等相关波形,其中图7a为电机相电流波形,图7b为dq轴和xy轴电流波形,图7c则呈现了中性点电压的波形。从图7中能够清晰地观察到,测量所得的相电流与参考值高度匹配,在正常条件下dq轴电流基本无波动,中性点电压波动较小。正常模式下的相电流、dq轴电流和中性点电压波形将作为参考。
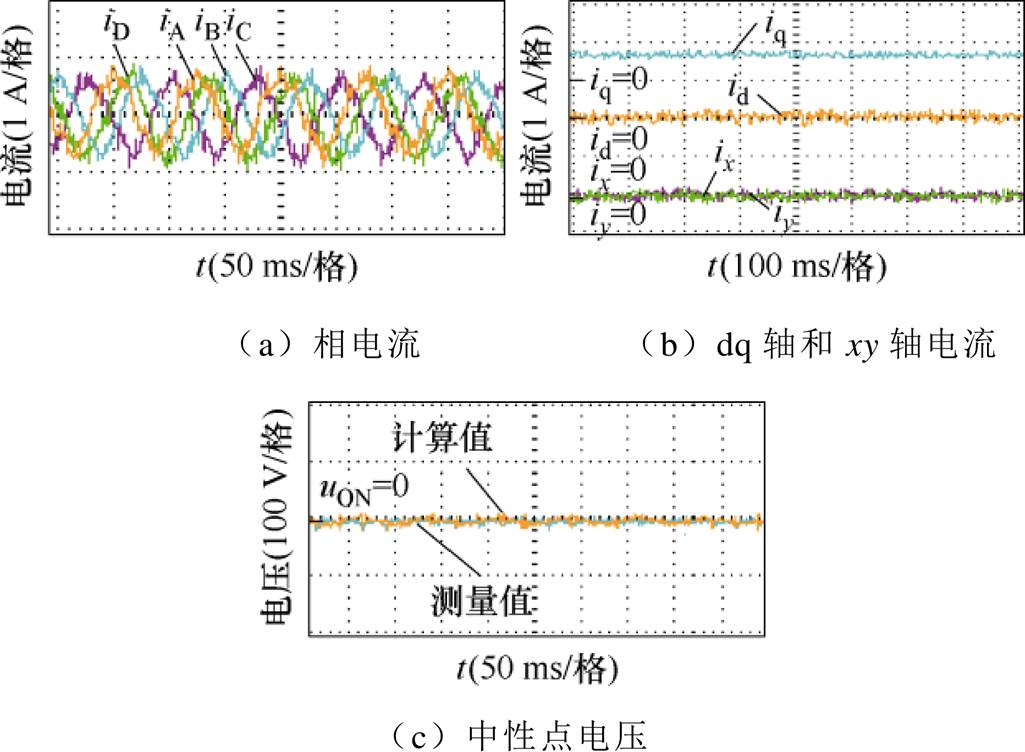
图7 正常模式运行下的波形
Fig.7 Waveforms in normal mode operation
采用类似文献[14]所提供的方法,在仿真模型中选用相同的参数给到电机模型并且进行仿真模拟开路故障,共模电流io的波形如图8所示,提取出其特征量,并根据所得出的特征量来准确判断是哪一种开路故障。
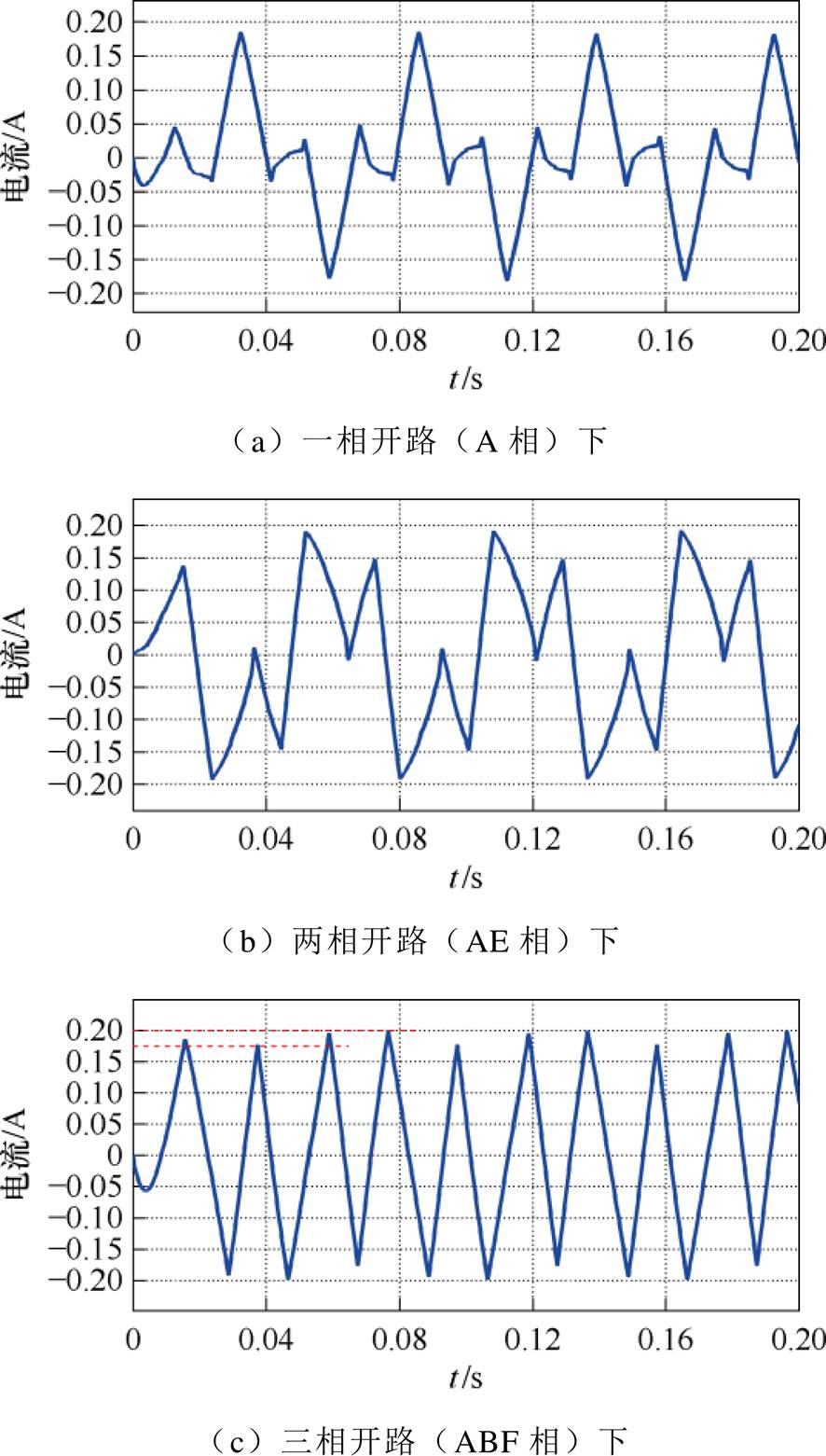
图8 不同类型故障下的共模电流波形
Fig.8 Common-mode current waveforms under different types of faults
以F相开路为例,对单相开路进行实验验证。图9为F相开路故障下无容错控制、仅容错电流控制、容错电流与电压控制以及本文所提中性点电压补偿后容错运行的电流波形。从图9a和图9b可知,经过容错控制后的电流由故障下的不平衡电流改善为幅值相等的电流,如图9c和图9d所示,经过容错电压配置与中性点电压补偿后电流波形幅值进一步优化。
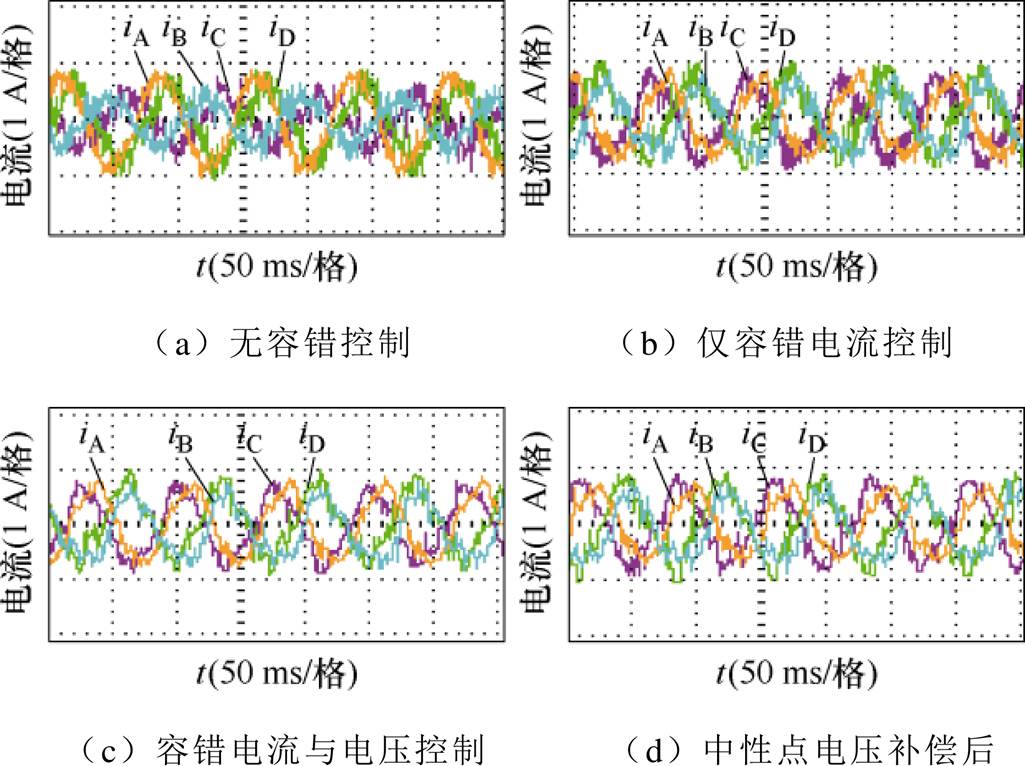
图9 F相单相开路下不同策略下的相电流波形
Fig.9 Phase current waveforms under different strategies for F-phase single-phase open circuit
图10为F相故障后在不同策略下dq轴电流波形。如图10a所示,在一相开路情况下id波动为±0.6 A,而iq电流的上下波动为1.5 A,在采用仅有容错电流配置后,电流id和iq波动幅度大幅降低,而经过本文所提容错电压配置与中性点电压补偿后,容错运行后iq电流趋于平滑。
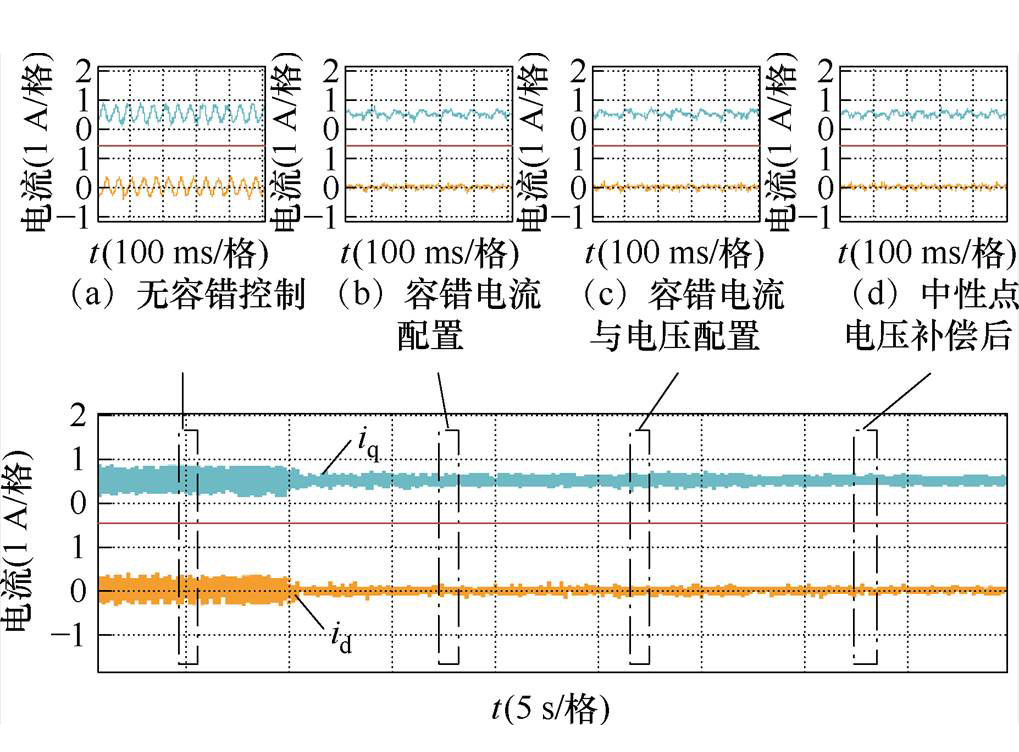
图10 F相单相开路不同策略下的dq轴电流波形
Fig.10 F-phase single-phase open circuit d-q axis current waveforms under different strategies
在电机容错控制后,相电流幅值与式(15)不相符,最主要的影响是出现开路故障后会引发中性点电压波动。为验证所提容错策略对抑制中性点电压波动的有效性,在不同策略下的中性点电压波形如图11所示,其中计算值由式(23)得出。
图11的工况设置与图7保持一致。从图11a能够清晰看出,当出现一相开路且未进行容错处理时,中性点电压的波动幅值大致在30 V左右。如图11b所示,在采用仅有容错电流配置后,中性点电压波动幅度有所降低。而在实施本文所提容错策略后,中性点电压波动幅度显著减小,这也证明了本文所提容错控制策略的有效性。
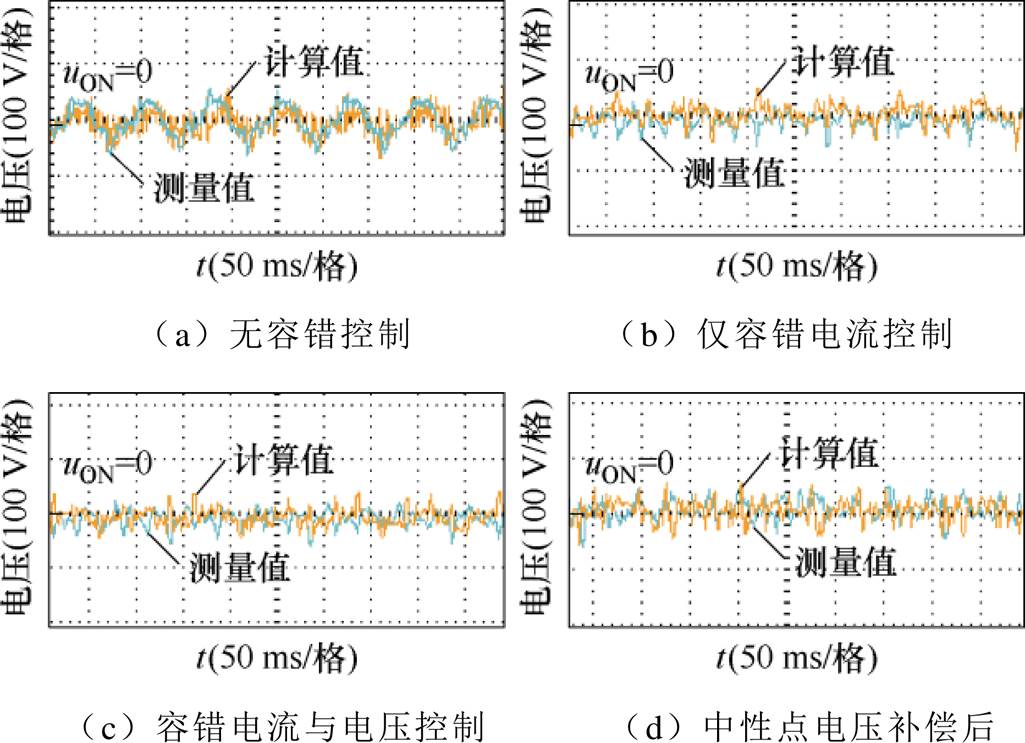
图11 F相单相开路不同策略下的中性点电压波形
Fig.11 Neutral voltage waveforms under different strategies for F-phase single-phase open circuit
以B、F两相开路为例,对两相开路进行实验验证。图12为在不同策略下的相电流波形,展示了故障后相电流从无容错控制下的不平衡演化到中性点电压补偿后电流达到平衡的过程。如图12b所示,仅容错电流控制下的电流并没有完全达到等幅值,这是由于未补偿容错电压和中性点电压波动导致,而在本文所提补偿方法下电流可以达到式(32)的要求。
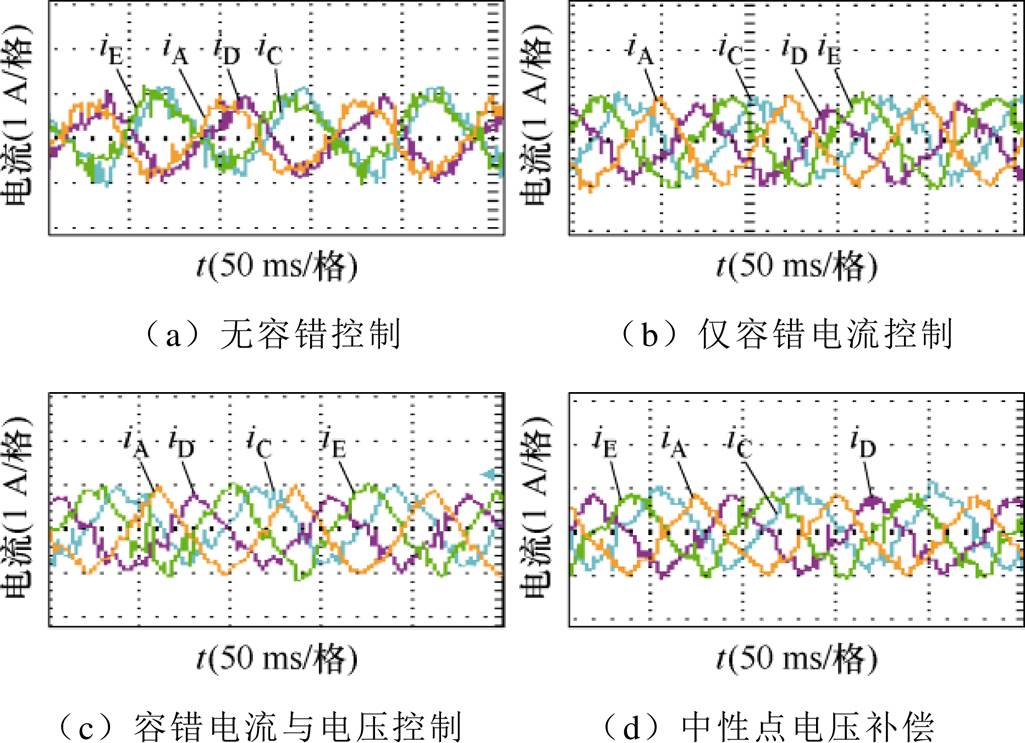
图12 BF两相开路不同策略下的相电流波形
Fig.12 Phase current waveforms under different strategies for BF two-phase open circuit
在保持相同的工况下,图13给出了BF两相开路时不同控制策略下dq轴电流波形。在无容错控制的情况下iq电流波动在1 A左右,而在经过容错电流配置后iq波动电流波动在0.4 A左右,在经过容错电压配置和中性点电压补偿后iq电流波动降低到0.1 A。
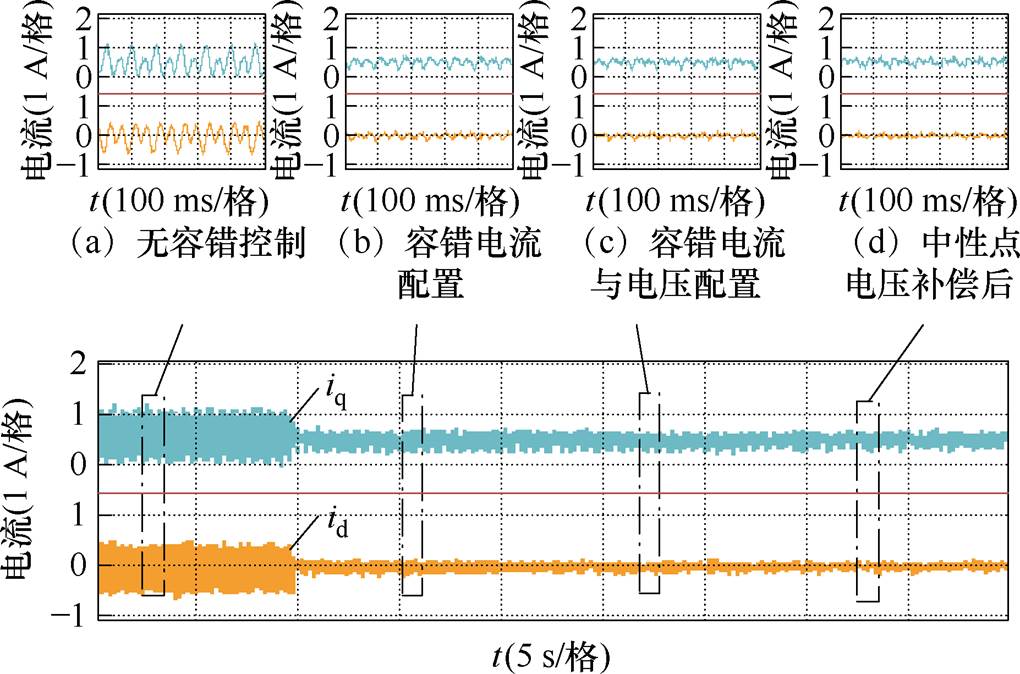
图13 BF两相开路不同策略下的dq轴电流波形
Fig.13 dq axis current waveforms under different open-circuit strategies for BF
图14展示了BF两相开路工况下不同控制策略对应的中性点电压波形,呈现了无容错控制时中性点电压幅度较大,经容错补偿后其幅度逐步缩小的变化过程。
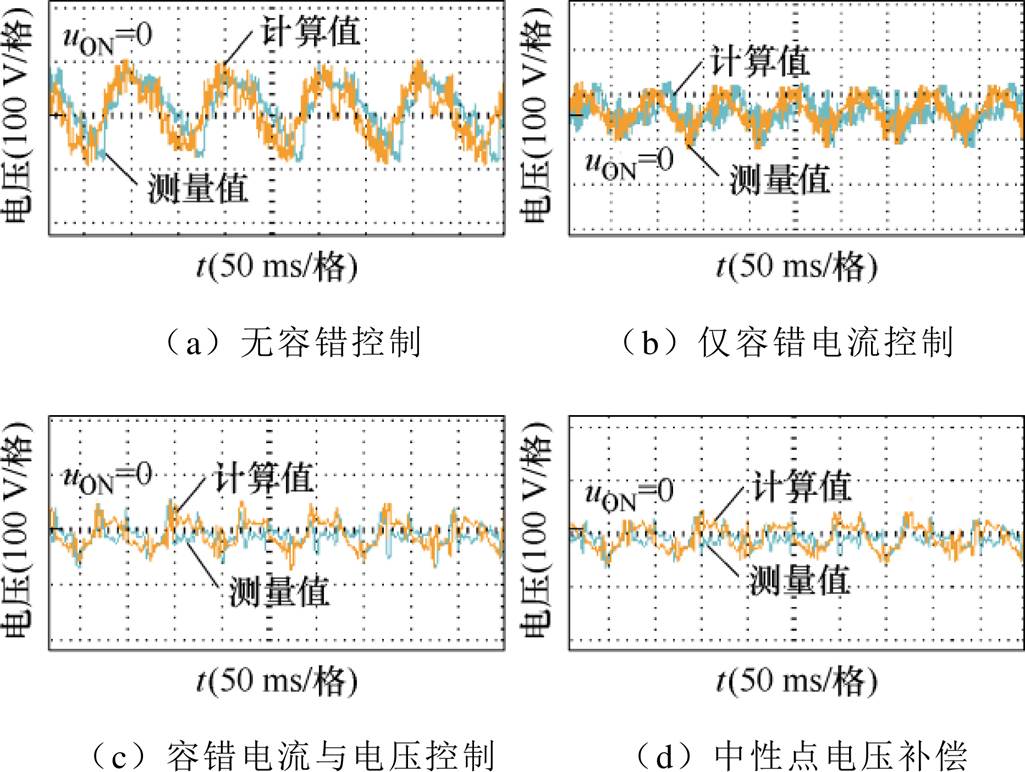
图14 BF两相开路不同策略下的中性点电压波形
Fig.14 Neutral voltage waveforms under different strategies for BF-phase two-phase open circuit
以A、B、F三相开路为例,对三相开路进行实验验证。图15为三相同时开路在不同策略下的电流波形,同样展示了在三相故障下,电流由无容错控制下的不平衡演变为中性点电压补偿后容错控制电流达到满足式(37)的演化过程。表明本文的容错控制策略和补偿策略在三相开路的情况下改善了电机容错后系统的控制性能。
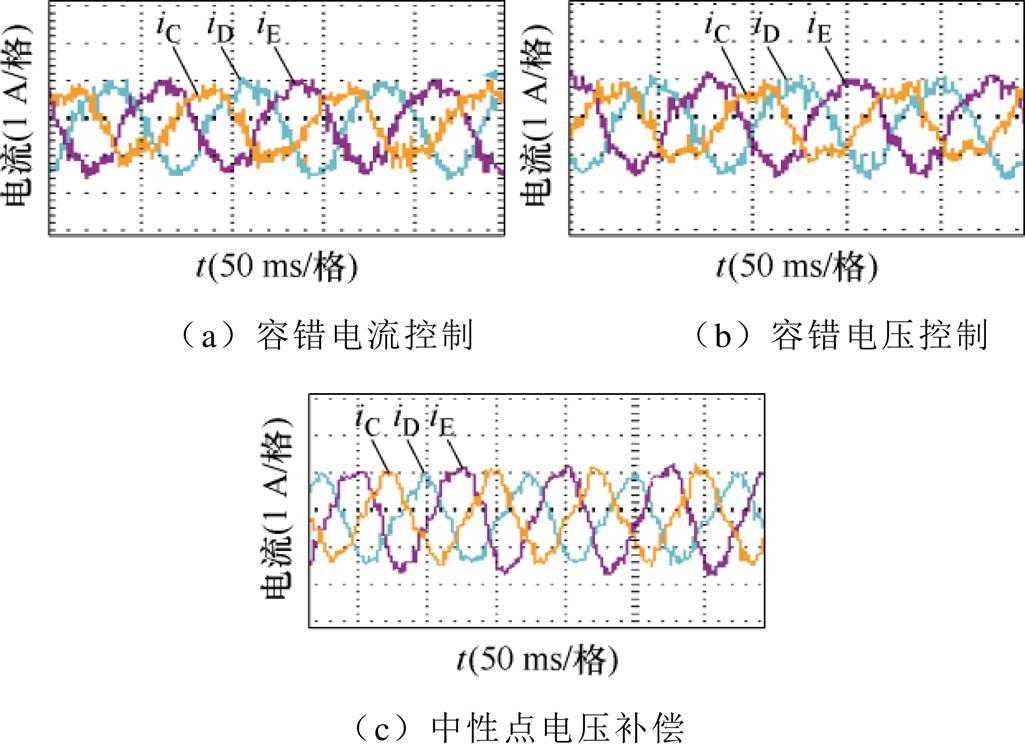
图15 ABF三相开路不同策略下的相电流波形
Fig.15 Phase current waveforms of ABF three-phase open circuit with different strategies
图16对应该演化过程中dq电流波形,可以看出iq电流波形经过中性点电压补偿后波动下降的过程。
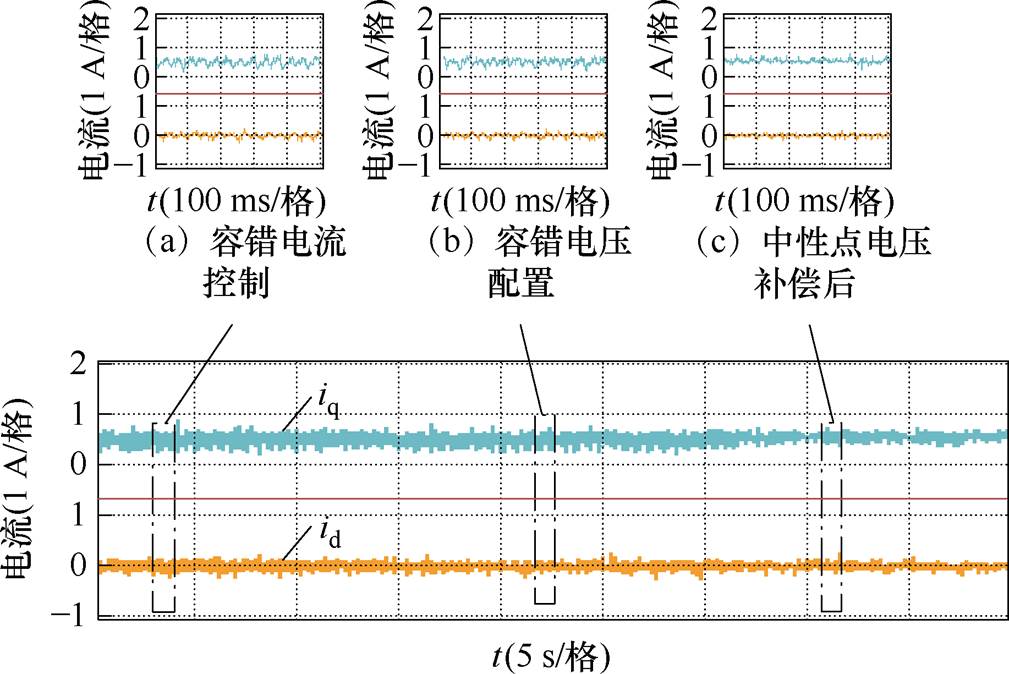
图16 ABF三相开路不同策略下的dq轴电流波形
Fig.16 dq axis current waveforms under different ABF three-phase open-circuit strategies
图17给出了三相开路工况下不同控制策略对应的中性点电压波形,清晰地呈现了中性点电压从无容错控制到施加容错补偿策略后的完整变化历程。
本文较为系统地解决了自然容错控制模式下容错电流、容错电压和中性点电压的配置问题,以提升双三相电机在多达三相开路故障下的容错控制性能,并获得如下结论:
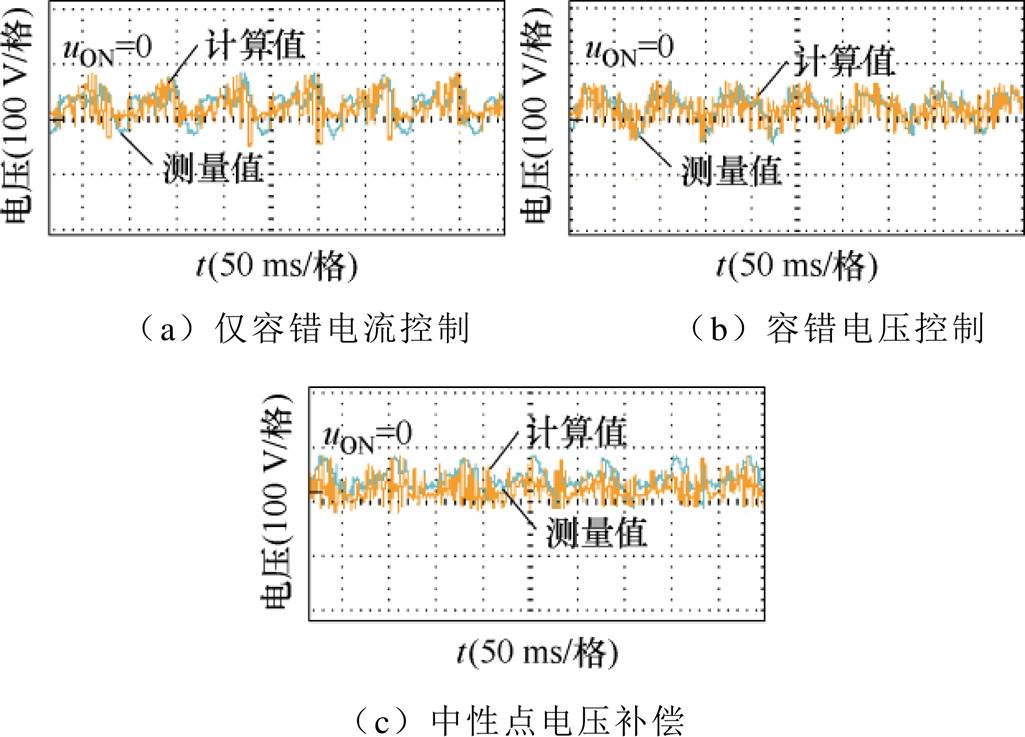
图17 ABF相三相开路不同策略下的中性点电压波形
Fig.17 Neutral voltage waveforms under different strategies for ABF-phase three-phase open circuit
1)施加剩余健康相相电流幅值相等和定子铜耗最小等约束,即可求解xy,o1o2空间电流配置系数;而dq子空间电流配置则与健康模式保持一致,以维持圆形旋转磁场;在控制方面,需根据可控自由度减少个数,同步减少谐波/零序子空间电流闭环个数。
2)谐波/零序子空间的电压处于受迫运动状态,其电压依据谐波/零序子空间模型进行配置。
3)不平衡供电模式下中性点电压波动显著,需要依据故障相的参考电压和反电动势的差值进行中性点电压补偿。
参考文献
[1] 王奇维, 李斌兴, 潘冠丞, 等. 基于转子位置误差解耦阻抗建模的永磁同步电机电感在线辨识方法[J]. 电工技术学报, 2025, 40(2): 439-451.
Wang Qiwei, Li Binxing, Pan Guancheng, et al. Impedance model based online inductance identi- fication method of permanent magnet synchronous motor decoupled from rotor position error[J]. Transactions of China Electrotechnical Society, 2025, 40(2): 439-451.
[2] 罗力岩, 樊启高. 一种改进型永磁同步电机无模型预测电流控制策略[J]. 电工技术学报, 2025, 40(4): 1034-1045.
Luo Liyan, Fan Qigao. An improved model-free predictive current control strategy for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2025, 40(4): 1034-1045.
[3] 于林鑫, 袁昕, 丁国华, 等. 基于模型预测锁相环的永磁同步电机转子位置估计方法[J]. 电气技术, 2024, 25(8): 18-26, 52.
Yu Linxin, Yuan Xin, Ding Guohua, et al. Research on sensorless control of permanent magnet syn- chronous motor based on model predictive method based phase locked loop[J]. Electrical Engineering, 2024, 25(8): 18-26, 52.
[4] 孙玉华, 赵文祥, 吉敬华, 等. 高转矩性能多相组永磁电机及其关键技术综述[J]. 电工技术学报, 2023, 38(6): 1403-1420.
Sun Yuhua, Zhao Wenxiang, Ji Jinghua, et al. Overview of multi-star multi-phase permanent magnet machines with high torque performance and its key technologies[J]. Transactions of China Electrotech- nical Society, 2023, 38(6): 1403-1420.
[5] 储炜, 林黄达, 易新强. 基于三重旋转坐标变换的双三相永磁同步电机模型预测电流控制策略[J]. 电工技术学报, 2024, 39(增刊1): 51-63.
Chu Wei, Lin Huangda, Yi Xinqiang. Model predi- ctive current control strategy for dual three-phase permanent magnet synchronous motors based on triple rotating coordinate transformation[J]. Transac- tions of China Electrotechnical Society, 2024, 39(S1): 51-63.
[6] 张平化, 范慧妍, 王爽. 一种改进的双三相永磁同步电机无价值函数模型预测转矩控制[J]. 电机与控制应用, 2024, 51(5): 30-38.
Zhang Pinghua, Fan Huiyan, Wang Shuang. An improved model predictive torque control for DTP- PMSM without cost function[J]. Electric Machines & Control Application, 2024, 51(5): 30-38.
[7] Wang Xueqing, Wang Zheng, He Mingzhi, et al. Fault-tolerant control of dual three-phase PMSM drives with minimized copper loss[J]. IEEE Transac- tions on Power Electronics, 2021, 36(11): 12938- 12953.
[8] 黄德猛, 周扬忠, 屈艾文, 等. 具有中点电压平衡与零序电流抑制的T型三电平逆变器供电六相PMSM-DTC[J]. 电工技术学报, 2024, 39(20): 6371- 6385.
Huang Demeng, Zhou Yangzhong, Qu Aiwen, et al. Six-phase PMSM-DTC control with midpoint voltage balance and zero-sequence current suppression powered by T-type three-level inverter[J]. Transac- tions of China Electrotechnical Society, 2024, 39(20): 6371-6385.
[9] 石鹏川, 王学庆, 贺明智, 等. 双三相永磁同步电机驱动系统简易容错控制方法研究[J]. 电机与控制学报, 2023, 27(12): 117-126.
Shi Pengchuan, Wang Xueqing, He Mingzhi, et al. Simple fault-tolerant control of dual three-phase PMSM drives[J]. Electric Machines and Control, 2023, 27(12): 117-126.
[10] 周华伟, 周振伍, 朱流川. 基于虚拟方波注入的五相永磁同步电机开路故障下直接转矩控制[J]. 电工技术学报, 2024, 39(22): 7073-7083.
Zhou Huawei, Zhou Zhenwu, Zhu Liuchuan. Virtual square wave injection based direct torque control for five-phase PMSM with open-circuit fault[J]. Transac- tions of China Electrotechnical Society, 2024, 39(22): 7073-7083.
[11] Hang Jun, Wang Xiaodong, Tian Zhengzheng, et al. ITSC fault diagnosis method for dual three-phase permanent magnet motor based on zero-sequence voltage difference[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2025, 13(5): 6459-6469.
[12] Guo Lingling, Wang K, Wang Tao, et al. Open-circuit fault diagnosis for dual three-phase permanent magnet machine considering nonideal condition[J]. IEEE Transactions on Industrial Electronics, 2024, 71(9): 10288-10296.
[13] 孟祥硕, 肖玲斐, 王国强, 等. 基于电流优化的双三相PMSM开路故障容错控制[J]. 电机与控制应用, 2022, 49(10): 1-9, 19.
Meng Xiangshuo, Xiao Lingfei, Wang Guoqiang, et al. Open-circuit fault-tolerant control of dual three-phase PMSM based on current optimization[J]. Electric Machines & Control Application, 2022, 49(10): 1-9, 19.
[14] Wang Quan, Tan Qiang, Guo Cong, et al. Fault diagnosis for five-phase PMSM drive using residual current fusion and probabilistic neural network[J]. Journal of Power Electronics, 2025, DOI: 10.1007/ s43236-025-01105-2.
[15] 李修东, 郑晓钦, 王海峰, 等. 最大转矩范围内九相永磁同步电机缺相容错运行铜耗优化策略[J]. 电工技术学报, 2022, 37(17): 4355-4363.
Li Xiudong, Zheng Xiaoqin, Wang Haifeng, et al. Copper loss optimization strategy for nine-phase permanent magnet synchronous motors fault-tolerant operation in maximum torque range[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4355-4363.
[16] Wang Wei, Zhang Jinghao, Cheng Ming, et al. Fault- tolerant control of dual three-phase permanent- magnet synchronous machine drives under open- phase faults[J]. IEEE Transactions on Power Elec- tronics, 2017, 32(3): 2052-2063.
[17] 杨金波, 李铁才, 杨贵杰. 一相开路双三相永磁同步电机建模与控制[J]. 电工技术学报, 2011, 26(10): 167-173, 187.
Yang Jinbo, Li Tiecai, Yang Guijie. Modeling and control of dual three-phase PMSM with one open phase[J]. Transactions of China Electrotechnical Society, 2011, 26(10): 167-173, 187.
[18] 周华伟, 陈铖, 向小龙, 等. 基于扰动观测器的五相永磁同步电机开路和短路容错矢量控制[J]. 电工技术学报, 2024, 39(15): 4782-4793.
Zhou Huawei, Chen Cheng, Xiang Xiaolong, et al. Disturbance-observer-based field-oriented control of five-phase PMSM under open-circuit and short-circuit faults[J]. Transactions of China Electrotechnical Society, 2024, 39(15): 4782-4793.
[19] Xu Liang, Ren Hui, Jiang Tingting, et al. Minimum copper loss fault-tolerant control of zero phase shift dual three-phase SPMSM by using reduced-order transformation matrices[J]. IEEE Transactions on Energy Conversion, 2024, 39(4): 2621-2630.
[20] González-Prieto I, Durán M J, Bermúdez M, et al. Assessment of virtual-voltage-based model predictive controllers in six-phase drives under open-phase faults[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2020, 8(3): 2634-2644.
[21] Song Zhanfeng, Jia Yilin, Liu Chaohui. Open-phase fault-tolerant control strategy for dual three-phase permanent magnet synchronous machines without controller reconfiguration and fault detection[J]. IEEE Transactions on Power Electronics, 2023, 38(1): 789-802.
[22] 周长攀, 杨贵杰, 苏健勇, 等. 基于正常解耦变换的双三相永磁同步电机缺相容错控制策略[J]. 电工技术学报, 2017, 32(3): 86-96.
Zhou Changpan, Yang Guijie, Su Jianyong, et al. The control strategy for dual three-phase PMSM based on normal decoupling transformation under fault condition due to open phases[J]. Transactions of China Electrotechnical Society, 2017, 32(3): 86-96.
[23] 郑博元, 李炳均, 徐永向, 等. 考虑电压约束时双三相永磁同步电机一相开路的建模与容错控制策略[J]. 中国电机工程学报, 2023, 43(1): 294-303.
Zheng Boyuan, Li Bingjun, Xu Yongxiang, et al. Modeling and fault-tolerant control for DTP-PMSM with one phase open circuit fault considering voltage constraints[J]. Proceedings of the CSEE, 2023, 43(1): 294-303.
[24] Hu Yashan, Feng Yaojing, Li Xuefei. Fault-tolerant hybrid current control of dual three-phase PMSM with one phase open[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2022, 10(3): 3418-3426.
Abstract Due to the demands for enhanced power output and operational reliability in aerospace, marine propulsion, and electric vehicles, dual-three-phase permanent magnet synchronous motors (DTP-PMSM) have attracted considerable attention due to their high reliability, large power capacity, and low torque ripple. Their strong tolerance to phase loss is a core advantage, making the development of simple yet efficient fault-tolerant control strategies and performance optimization imperative. Among existing fault-tolerant control technologies, the reduced-order decoupling transformation fault-tolerant strategy has notable limitations. Under various phase-loss fault modes—such as single-phase or two-phase open-circuit faults—it is necessary to reconstruct mathematical models and control equations for each fault topology. It lengthens the control development cycle and reduces real-time control accuracy due to the complexity of model switching, resulting in substantial computational overhead. By contrast, natural fault-tolerant control allows direct reuse of the decoupling transformation matrix from normal operating conditions, enabling fault-tolerant operation after a fault through harmonic current regulation alone, without the need to reconstruct the control framework. Thus, it has attracted widespread research interest. However, most natural fault-tolerant strategies overlook the impacts of open-phase conditions. Such unaddressed factors lead to current distortion and aggravated torque ripples after a fault, ultimately resulting in a marked decline in fault-tolerant performance. Therefore, this paper proposes an optimization method for natural fault-tolerant control under phase-loss faults.
To address the post-fault control degrees of freedom, a matching relationship between the number of open phases and the number of current control loops is defined to ensure controllability. To address the decoupling failure of fundamental and harmonic currents, a harmonic-current configuration scheme based on a linear combination of fundamental currents is proposed. By integrating constraints such as equal current amplitudes in healthy phases and minimal stator copper loss, the optimal fault-tolerant current configuration is derived. For a fault-tolerant voltage configuration, this paper presents a precise optimal calculation method based on the harmonic/zero-sequence spatial current model. Meanwhile, a technical solution is proposed that integrates neutral-point voltage calculation and compensation. Experiments were carried out on a dual three-phase motor control test platform. After a single-phase open-circuit fault, the proposed fault-tolerant current configuration markedly optimized current waveforms. Combined with the fault-tolerant voltage configuration and neutral-point voltage compensation strategy, both neutral-point voltage and d-q-axis current fluctuations of the motor were suppressed. Extending this method to scenarios with multi-phase open-circuit faults maintained stable, reliable optimization performance.
The following core conclusions are: (1) The current configuration coefficients in the x-y and o1-o2 spaces can be easily solved by the proposed optimization method, laying a foundation for the accurate configuration of fault-tolerant currents. (2) The voltage in the harmonic/zero-sequence subspace possesses forced motion characteristics, and the fault-tolerant control performance can be optimized via targeted parameter configuration of this subspace. (3) The neutral point voltage compensation strategy not only effectively enhances the operational performance after fault-tolerant control but also boasts a straightforward calculation approach. Meanwhile, this method applies to dual three-phase motors with isolated neutral points and to other multi- three-phase motor scenarios, such as nine-phase motors.
keywords:Dual three-phase permanent magnet synchronous motor, natural decoupling open-phase fault-tolerant control, fault-tolerant current, fault-tolerant voltage, neutral point voltage
DOI: 10.19595/j.cnki.1000-6753.tces.250391
中图分类号:TM301.2
国家自然科学基金(52207061)和国家自然科学基金联合基金(U22A20218)资助项目。
收稿日期 2025-03-12
改稿日期 2025-09-25
黄 涛 男,2001年生,硕士研究生,研究方向为双三相电机驱动及其容错控制。E-mail: SZ2303243@nuaa.edu.cn
田 兵 男,1989年生,副研究员,硕士生导师,研究方向为先进永磁电驱动技术与逆变构网技术等。E-mail: tian.bing@nuaa.edu.cn(通信作者)
(编辑 崔文静)