 (1)
(1)
摘要 针对高精度永磁同步直线电机(PMLSM)的磁阻力、摩擦力等推力波动问题,该文设计了一种基于扰动模型前馈(DMF)与线性扩张状态观测器(LESO)相结合的推力波动复合补偿策略。首先,从PMLSM的物理结构及磁场分布特点,分析了电机动子在运动过程中的受力情况和推力波动的位置、频率特性。发现在高速高动态响应下推力波动存在较高的频率分量,会导致系统伺服误差变大,因此提出扰动建模与LESO相结合的推力波动复合补偿策略。其次,使用神经网络对磁阻力进行位置域建模,使用分段线性模型对摩擦力进行速度域建模,使用LESO对建模后残余的扰动进一步估计并补偿,以提高系统在全速域下的推力波动抑制能力。最后,通过PMLSM样机平台的位置、速度伺服试验分析了所提策略对磁阻力各频率分量补偿的有效性,验证了所提策略对推力波动的抑制能力以及对电机动子质量参数变化的适应性。结果表明,该文所提控制策略在稳态、动态下均具有良好的推力波动补偿效果,能够提高PMLSM系统伺服控制精度,并对电机动子质量变化具有良好的鲁棒性。
关键词:永磁同步直线电机 推力波动 神经网络建模 扩张状态观测器
随着微控制器技术和永磁材料的不断发展,以永磁同步直线电机(Permanent Magnet Linear Synchronous Motor, PMLSM)作为驱动对象的伺服系统无需中间传动机构即可产生直线运动,不受齿轮和丝杠机械耦合问题的影响,具有结构简单、响应快、推力密度大等优点,被广泛地运用于直线运输以及精密机床、半导体加工等高端制造场合[1-4]。
然而,直线电机平铺式的结构也带来了不可忽视的问题,即由于动子线圈的有限长、磁极的平铺特点,导致磁场不均匀,引发了一系列与动子位置有关的推力波动[2-3]。其中,PMLSM的初级铁心开断会产生端部效应力,初级开槽式的结构会导致齿槽效应力。通常将端部力和齿槽力称为磁阻力,磁阻力的存在会使电机动子在运动过程中产生复杂的谐波脉动[4],恶化伺服精度。此外,由导轨作为支撑结构的直线电机还受摩擦力的扰动影响。由磁阻力和摩擦力等构成的推力波动对PMLSM伺服系统的控制性能影响较大,需对其进行补偿。
当前,对PMLSM的磁阻力抑制的研究主要有电机本体结构改进和控制算法优化两类[5]。在电机本体结构优化方面,可以通过增加辅助磁极或铁心[6-7]、改变端齿结构[8-9]、优化永磁体阵列[10]等方法从机理上减小磁阻力。但是,通过改进电机物理结构以削弱磁阻力的方法将会增加电机的制造与维修成本。在控制算法优化方面,文献[11-12]使用三角级数对磁阻力的主要频率分量进行拟合建模,并通过试验验证了补偿精度。文献[13]考虑了磁阻力的理论模型,提出基于机理-数据的磁阻力混合模型补偿方法,通过仿真验证了该模型在不同电机参数、不同工况下均具有较好的适用性。文献[14]提取误差信号中与磁阻力对应频率的分量,使用迭代学习的方法对磁阻力进行辨识并补偿。此类基于傅里叶级数的建模通常需要较多的频率分量才能有较高的建模精度。考虑到磁阻力扰动的时变特性,文献[15]使用高阶扩张状态观测器(Extended State Observer, ESO)、文献[16]使用卡尔曼观测器、文献[17]使用滑模观测器、文献[18]使用谐振观测器对磁阻力进行估计,以改善系统的控制精度。由于磁阻力的变化频率与动子速度相关,而观测器的性能通常受到噪声和增益的制约,对磁阻力的高频分量补偿有限。此外,模型预测控制[19-20]、模糊控制[21]、自适应滑模控制[22-24]、神经网络控制[25-27]等一系列先进控制算法也被应用到PMLSM控制系统中,以增强系统的抗扰动能力,但也存在控制参数整定复杂、算法计算量大、实时性不高等问题。相对电机本体结构改进方法,控制算法优化方法具有成本低、灵活性强等优点,具有被广泛运用于PMLSM伺服系统的可能性。
基于扩张状态观测器的抗扰方法起源于自抗扰控制[28],线性扩张状态观测器(Linear Extended State Observer, LESO)集总扰动估计的思想不依赖PMLSM的精确数学模型,对中低频率的扰动具有良好的抑制效果,同时,LESO的增益可依据观测器带宽原理进行设计,参数物理意义明确,具有很强的实用性。但是,实际应用中LESO的带宽受到量化和噪声的限制,不能有效抑制高速高动态响应下的推力波动高频分量。基于扰动模型前馈的抗扰方法不受系统带宽限制,是输入信号经过扰动模型得到补偿值的开环方法,适用于补偿含有高频成分的扰动,然而该方法的补偿效果受到扰动模型的精度影响。
针对PMLSM推力波动问题,本文根据其变化特性提出一种基于扰动模型前馈加扩张状态观测器的推力波动复合补偿策略。首先,对磁阻力、摩擦力的位置域、速度域特点进行分析,并对LESO抑制时变扰动的能力进行理论分析,通过使用非线性拟合能力较强的神经网络对磁阻力与位置的映射关系进行建模,并使用分段线性摩擦模型对摩擦力进行建模,建立扰动模型前馈(Disturbance Model Feedforward, DMF)补偿策略实现对扰动的全频率分量的初步抑制。然后,采用LESO对建模后残余的推力波动及其他扰动进一步估计并实现中低频率域补偿。最后,在传统的电流、速度、位置三闭环系统控制框架上,通过试验验证所提方案的可行性和有效性。
交流永磁同步直线电机在物理结构上可视为旋转电机的径向展开,运行机理与旋转电机类似,按照磁场定向控制原理,可得PMLSM在dq同步旋转坐标系下的电压平衡方程为
(1)
式中, 分别为d、q轴的电压、电流、电感、电阻;
分别为d、q轴的电压、电流、电感、电阻; 分别为d、q轴磁链和永磁体磁链;
分别为d、q轴磁链和永磁体磁链; 、
、 分别为PMLSM动子移动速度和永磁体NS极距。
分别为PMLSM动子移动速度和永磁体NS极距。
根据直线电机功率转换关系计算得到电磁推力表达式为
 (2)
(2)
式中, 为电机极对数,=1。当采用
为电机极对数,=1。当采用 的控制策略时,PMLSM电磁推力的表达式可进一步表示为
的控制策略时,PMLSM电磁推力的表达式可进一步表示为
 (3)
(3)
其中
式中, 为电机的电磁推力系数。
为电机的电磁推力系数。
根据直线电机的工作特点,得到动子的推力平衡方程为
 (4)
(4)
式中,m为电机动子及工作台质量; 分别为直线电机固有的磁阻力、动子与导轨间的摩擦力、负载阻力,其中磁阻力和摩擦力构成了直线电机推力波动的主要部分。
分别为直线电机固有的磁阻力、动子与导轨间的摩擦力、负载阻力,其中磁阻力和摩擦力构成了直线电机推力波动的主要部分。
齿槽力的产生原因为初级铁心中齿与槽相对次级永磁体的气隙磁阻不相等,导致磁场畸变,齿槽力具有空间位置周期性质,其周期与齿槽间距有关。端部效应力的产生原因为动子铁心两端开断且有限长、定子永磁体平铺安装,当动子经过每一个磁极时,两端的磁场将会畸变,端部力也是位置的周期函数,其周期与极距有关。相对于齿槽力,端部力的幅值较大,对动子的作用也更为显著,所以磁阻力总体表现为关于动子位置的周期函数[4],周期与磁极极距有关。磁阻力一般可表示为关于动子位置的三角级数和的形式,即
 (5)
(5)
式中,x为动子位置; 分别为磁阻力不同频率分量的幅值、余弦幅值、正弦幅值、位置频率、初始相位。可以看出,磁阻力包含和运行频率相关的大量谐波分量。
分别为磁阻力不同频率分量的幅值、余弦幅值、正弦幅值、位置频率、初始相位。可以看出,磁阻力包含和运行频率相关的大量谐波分量。
由导轨作为支撑结构的动子在运动时还受到摩擦力的影响,关于摩擦力的数学模型,可用Stribeck指数摩擦模型表示为
 (6)
(6)
式中,B为黏滞摩擦系数; 分别为最大静摩擦力、库仑摩擦力、临界摩擦速度。
分别为最大静摩擦力、库仑摩擦力、临界摩擦速度。
LESO观测器可将系统所受的扰动在线估计,并及时补偿到系统q轴电流指令中。由式(4)所示的动子动力学平衡方程,令 为PMLSM的推力系数质量比,忽略电机参数摄动及其他未建模部分,可给出速度环二阶状态空间表达式为
为PMLSM的推力系数质量比,忽略电机参数摄动及其他未建模部分,可给出速度环二阶状态空间表达式为
 (7)
(7)
其中
式中, 为等效扰动电流;
为等效扰动电流; 为等效扰动电流的一阶导数。
为等效扰动电流的一阶导数。
根据文献[28]中的观测器理论给出速度环二阶LESO扰动观测器状态空间模型为
 (8)
(8)
式中, 为状态估计量;
为状态估计量; 为观测器增益。以扰动电流f作为输入分析观测器的扰动估计误差,定义状态估计误差为
为观测器增益。以扰动电流f作为输入分析观测器的扰动估计误差,定义状态估计误差为 ,代入PMLSM机械子系统动力学模型和观测器模型可得
,代入PMLSM机械子系统动力学模型和观测器模型可得
 (9)
(9)
为了分析LESO对高频扰动的抑制性能,现考虑当扰动为磁阻力即关于位置域的三角级数和的形式时,二阶观测器的动态性能。匀速运动时,取z个磁阻力分量的式(5)的拉普拉斯变换为
 (10)
(10)
将式(10)代入观测器对于集总扰动的估计误差公式,同时采用带宽原理配置观测器增益,即 ,其中
,其中 为观测器带宽,可得估计误差的频域表达式为
为观测器带宽,可得估计误差的频域表达式为
 (11)
(11)
从式(10)、式(11)可知,当动子速度增大时,磁阻力扰动频率也变大,经过二阶LESO后,估计误差将变大,意味着补偿性能下降。由式(9)得到观测器扰动估计误差传递函数,在不同带宽下的伯德图如图1所示。由图1可知,当磁阻力频率在转折频率,即观测器带宽以内时,扰动估计误差传递函数幅值小于0 dB,扰动抑制有效。且离转折频率越远,抑制性能越好,当磁阻力频率在转折频率以外时,观测器将不能估计出扰动。
面对LESO观测器的局限性,本文在LESO抗扰的基础上,结合扰动模型对磁阻力、摩擦力进行前馈补偿,通过磁阻力、摩擦力进行离线建模,可将推力扰动电流的幅值减小为残余扰动的幅值 ,即前馈模型的不完全建模部分,再使用LESO对进行估计补偿。
,即前馈模型的不完全建模部分,再使用LESO对进行估计补偿。
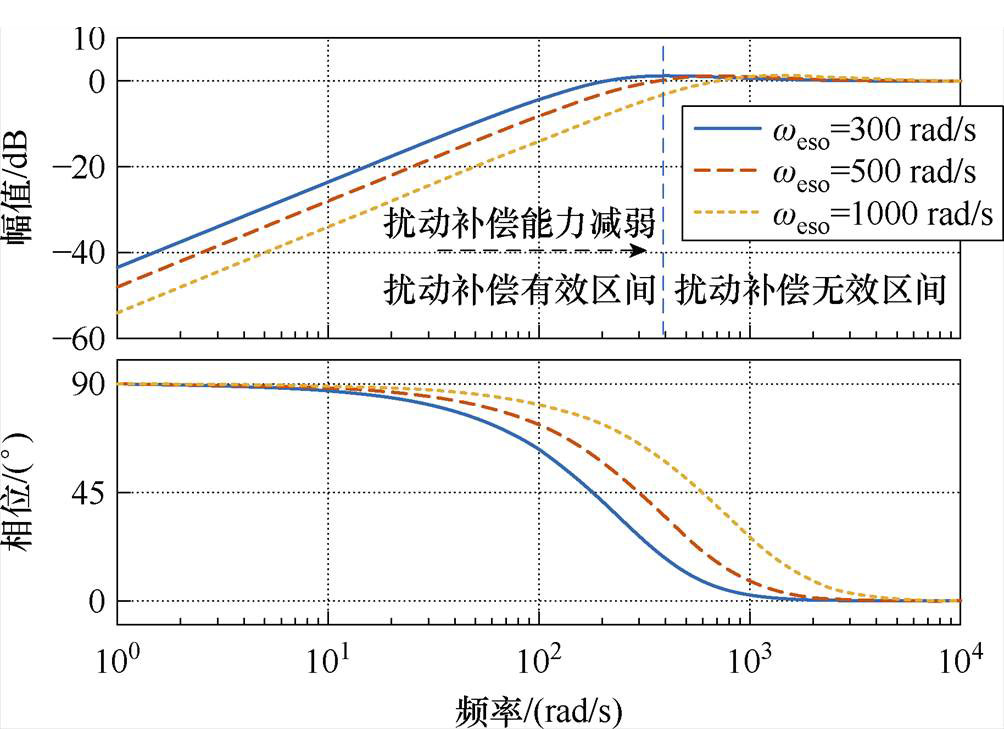
图1 二阶LESO扰动估计误差传递函数伯德图
Fig.1 Bode plot of second-order LESO disturbance estimation error transfer function
在直线电机系统中,磁阻力由定子平铺磁极与动子铁心的铁磁相互作用力产生,摩擦力由定子支撑导轨与动子接触而产生,两者在物理机理上相互独立,因此,可分别在位置域、速度域内对磁阻力、摩擦力进行建模。
为了分析电机的磁阻力、摩擦力特性,分别在不同匀速运动下测得空载q轴电流以表示推力波动。在PMLSM的位置、速度坐标系中,磁阻力、摩擦力之和如图2所示。
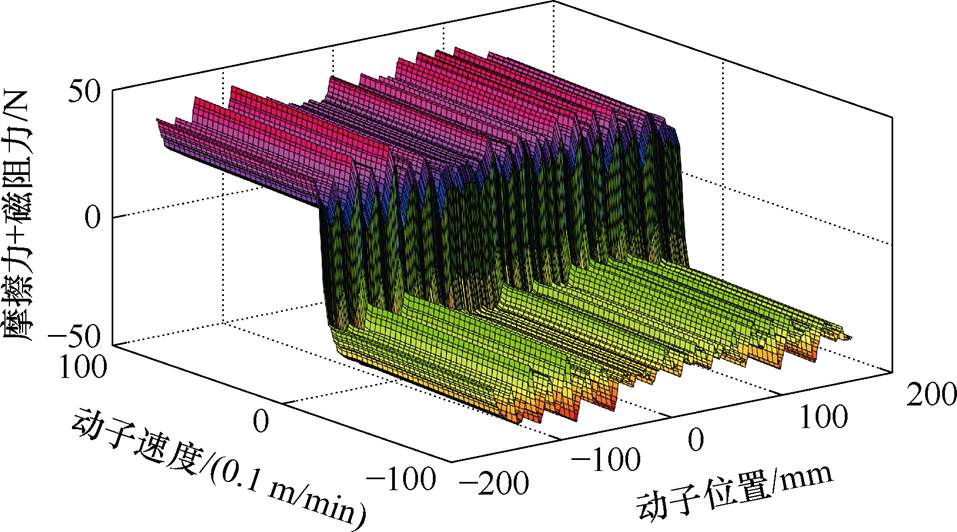
图2 位置、速度坐标系下磁阻力、摩擦力之和
Fig.2 Sum of detent force and friction in position and velocity coordinate
对于图2所示的复杂扰动建模,可在速度、位置区间内对时间域信息进行重采样,使用全行程匀速下的空载q轴电流的交流分量得到磁阻力数据、直流分量得到摩擦力数据,并分别使用神经网络拟合模型、分段线性摩擦模型对其进行离线建模,建模的流程如图3所示,主要分为时间域同步数据采样、重采样转换、构建训练集、建模拟合等步骤。
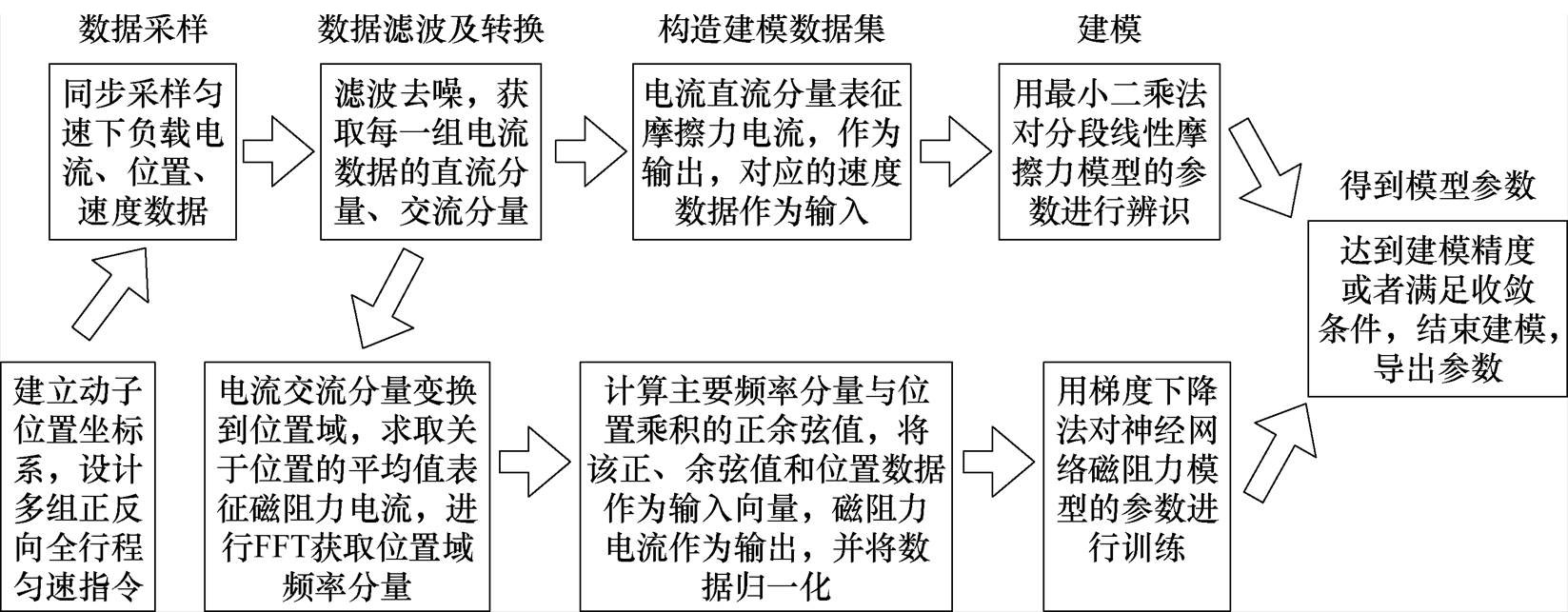
图3 磁阻力、摩擦力建模流程
Fig.3 Process diagram for modeling detent force and friction force
2.2.1 磁阻力建模
磁阻力是直线电机动子铁心与定子永磁磁极相互作用产生的干扰力,具有位置周期性和丰富的谐波特性,用显式的数学模型建模较为复杂。神经网络建模由于采用激活函数,非线性拟合效果较好,因此本文使用基于位置和电流数据的神经网络对磁阻力进行试验建模。
在空载下测取电机匀速1.5 m/min运动下的q轴电流指令和位置反馈信号,去除摩擦力分量后,得到磁阻力,再将其进行傅里叶变换得到磁阻力关于位置域的主要频率如图4所示。
根据时域到位置域极距周期转换关系式
 ,其中
,其中 分别为位置域极距周期、时域频率,得到位置域周期见表1,PMLSM极距为15 mm。
分别为位置域极距周期、时域频率,得到位置域周期见表1,PMLSM极距为15 mm。
从傅里叶变换结果可得,磁阻力主要有3个频率分量,对应的位置周期分别接近2、1、0.5的磁极极距,具有明显的位置周期性。
为了兼顾磁阻力拟合精度和神经网络模型实时计算,可构建磁阻力神经网络建模结构如图5所示,网络输入基向量为磁阻力关于位置频率的正余弦分量以及全行程位置信号,其中使用全行程位置信号用于保障磁阻力谐波的整体拟合精度,网络输出为磁阻力。神经网络激活函数采用tanh(双曲正切)函数,网络输入、输出数据均为归一化后的数据。
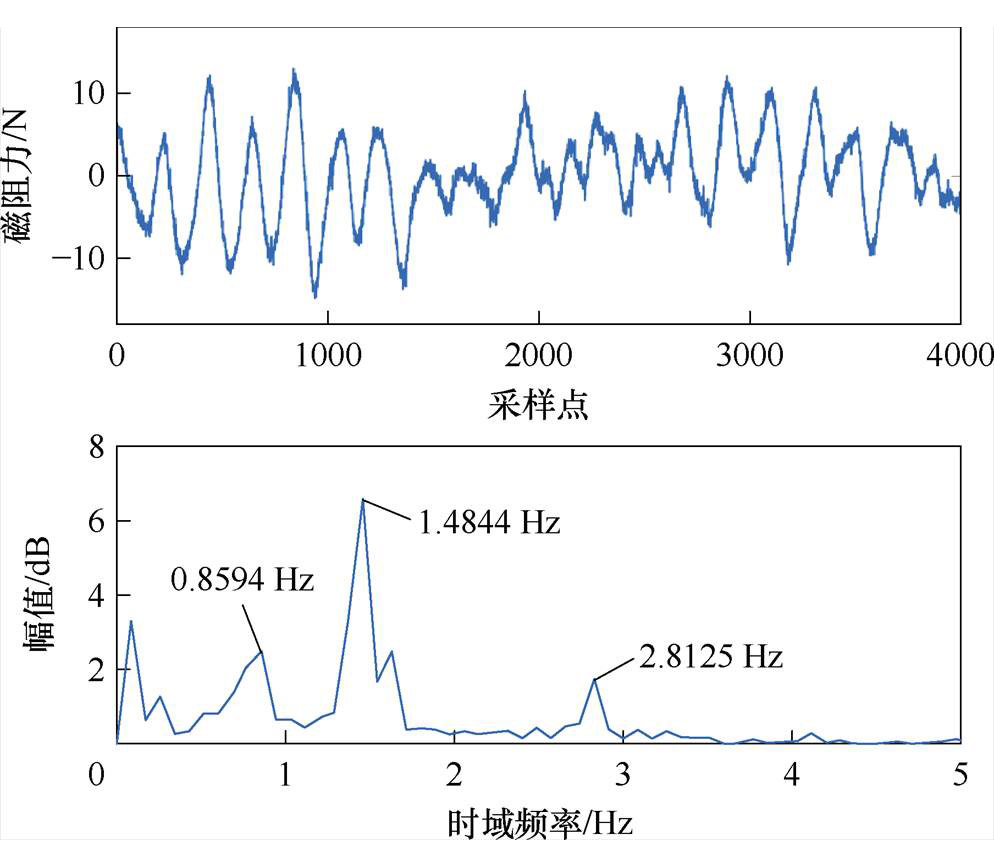
图4 电机磁阻力时域频率分量
Fig.4 Frequency component of detent force in time-domain
表1 磁阻力位置域周期
Tab.1 Period of detent force in position domain
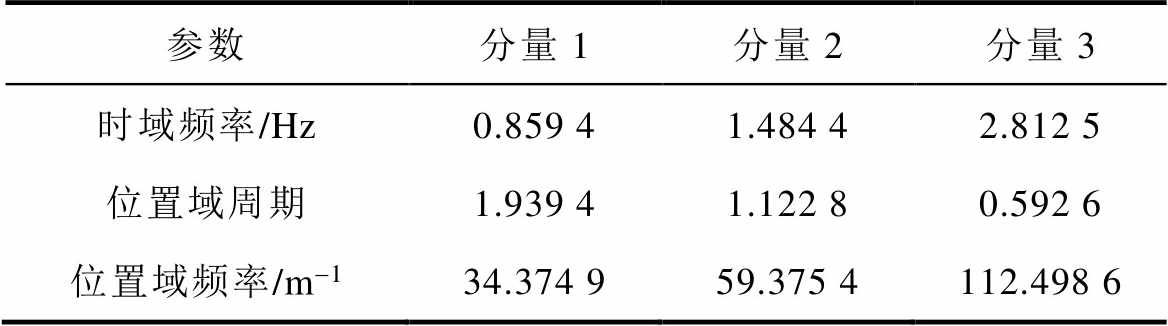
参数分量1分量2分量3 时域频率/Hz0.859 41.484 42.812 5 位置域周期1.939 41.122 80.592 6 位置域频率/m-134.374 959.375 4112.498 6
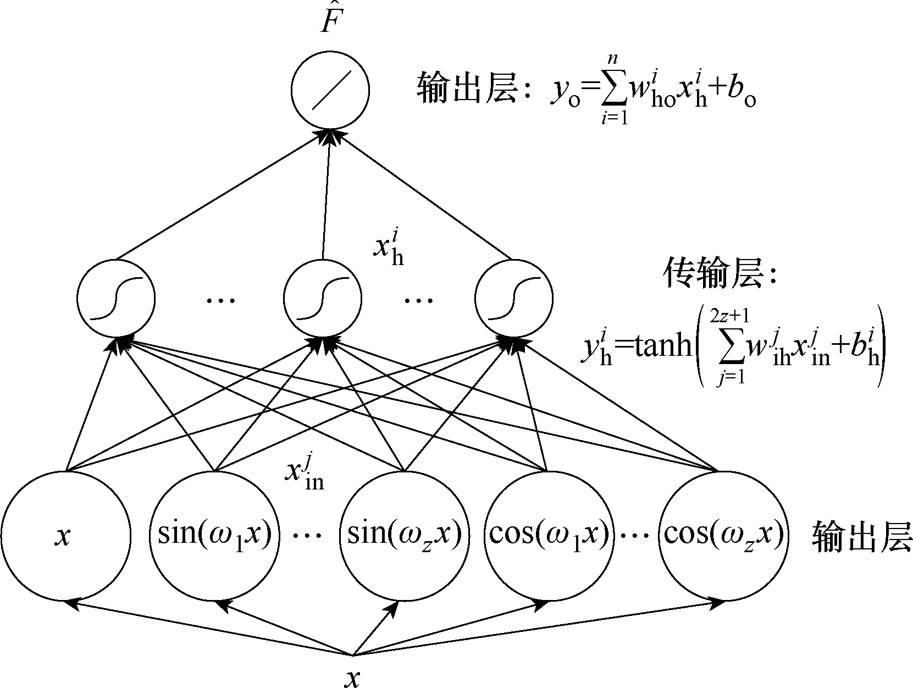
图5 磁阻力神经网络建模结构
Fig.5 Neural network architecture for modeling detent force
使用神经网络对磁阻力和位置域的映射关系进行离线建模训练时,网络权重参数的更新采取误差后向传递规则,即
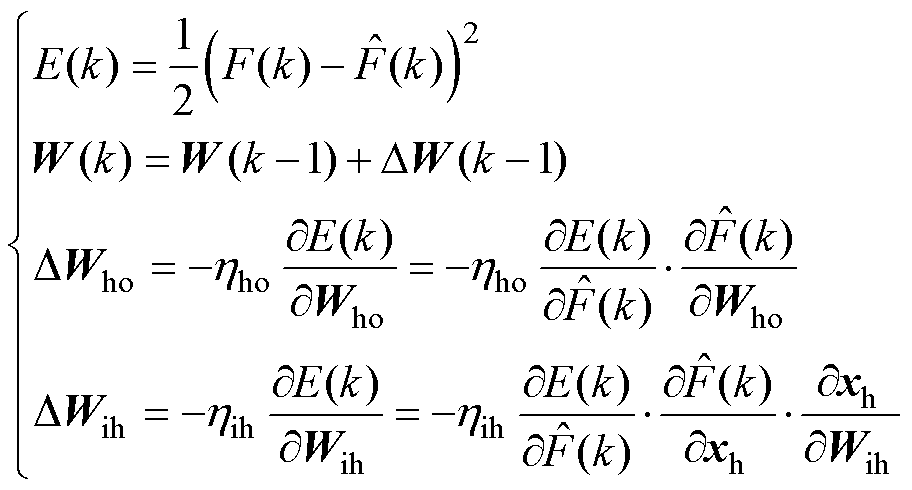 (12)
(12)
式中, 为迭代次数;E为训练误差;
为迭代次数;E为训练误差; 为磁阻力数据,
为磁阻力数据, 为其网络估计输出值;W、
为其网络估计输出值;W、 分别为权重、权重变化量;
分别为权重、权重变化量; 、
、 分别为输出层和传输层权重变化量;
分别为输出层和传输层权重变化量; 为传输层输出;
为传输层输出; 、
、 分别为输出层和传输层参数更新率。数据样本按照7
分别为输出层和传输层参数更新率。数据样本按照7 1.51.5的比例随机分为训练集、测试集、验证集。
1.51.5的比例随机分为训练集、测试集、验证集。
使用图5所示网络结构,其中传输层神经元数量设置为3个,输入基向量中磁阻力的位置频率分量取表1中所示的3个主要频率。经过离线训练拟合后,得到PMLSM全行程磁阻力建模拟合结果如图6所示,其拟合决定系数R2=0.897 2。
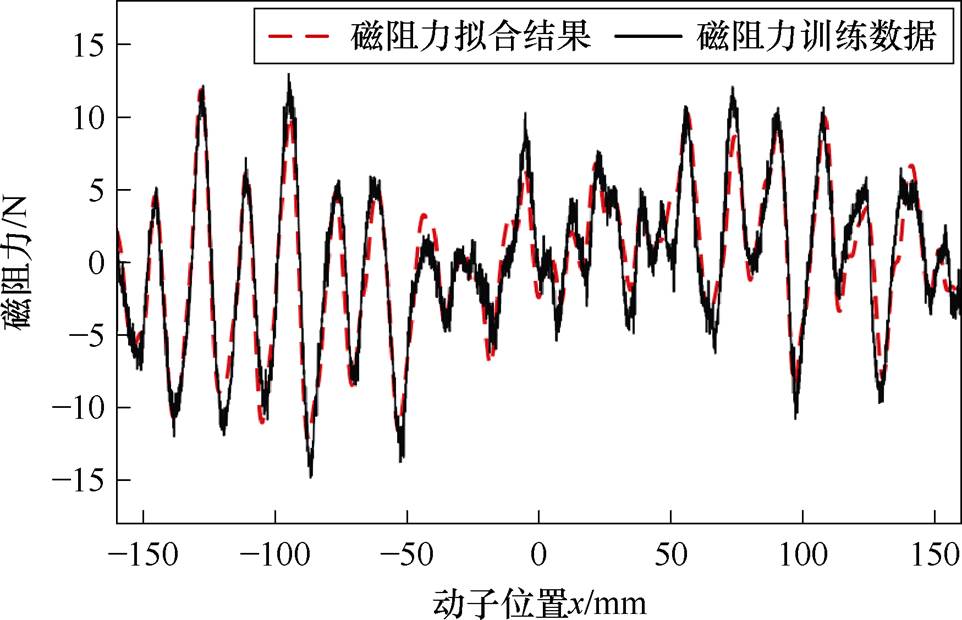
图6 磁阻力神经网络拟合结果
Fig.6 Fitting results of detent force by neural network
由拟合结果可知,基于神经网络的磁阻力数据建模基本可以拟合其周期特性和主要谐波分量,对小部分高频谐波拟合效果欠佳,理论上只需增大网络规模即可提高拟合精度,但为了确保后续计算的实时性,需权衡神经网络规模与拟合精度。此外,该部分高频谐波磁阻力幅值相对较小,同时本文还将结合LESO扰动补偿和速度PI闭环控制,所以该部分高频磁阻力谐波的建模误差对伺服精度的影响有限。
2.2.2 摩擦力建模
根据图2可得速度域摩擦力数据,由匀速运动的负载的电流直流分量得到摩擦力,数据如图7所示。由式(6)的摩擦模型可知,摩擦力可分为库仑摩擦、静摩擦、黏滞摩擦,其中库仑摩擦为指数非线性模型,建模复杂,一般可用简化后的线性模型近似替代,以降低计算量。因此,补偿模型中使用分段线性摩擦模型近似替代式(6)所示的指数摩擦模型,分段线性摩擦模型的数学表达式为
 (13)
(13)
将试验数据样本按照73的比例随机分为训练集、测试集,使用最小二乘法即可拟合出相应参数,摩擦力的建模结果如图7所示,其拟合决定系数R2= 0.916 4。
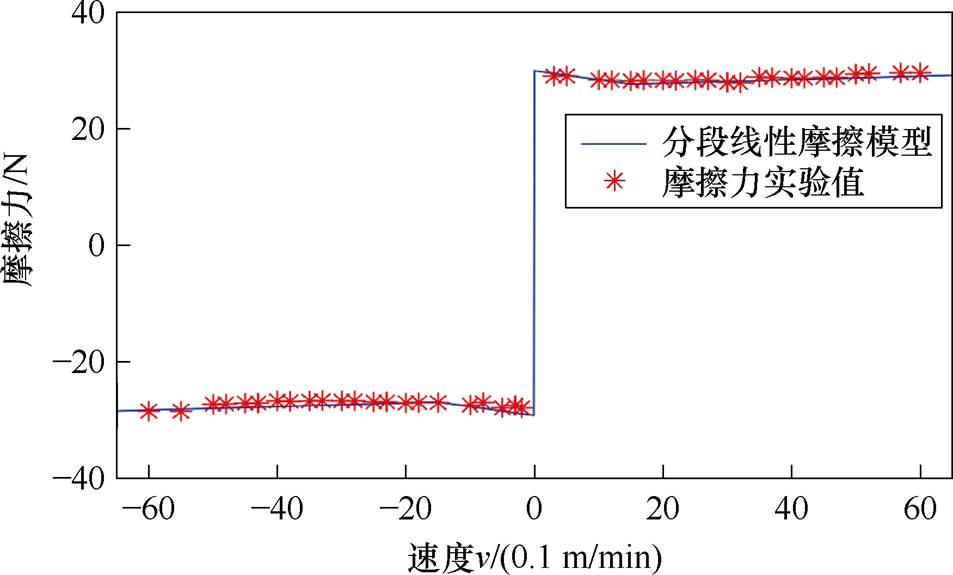
图7 摩擦力试验数据及模型
Fig.7 Experimental data and modeling of friction
PMLSM所受推力波动的不同成分具有不同的位置域、速度域特性,对于动子而言,磁阻力是与位置有关的周期性扰动力,摩擦力是与速度有关的扰动力。磁阻力的频率随着动子速度的增大而变大,速度较快时含有高频扰动,摩擦力在速度过零时存在突变,对扰动的实时抑制能力有较高要求。
为了对全频率范围的推力波动实现较强的抑制能力,本文提出基于扰动模型前馈与LESO相结合的推力波动复合补偿策略,原理框图如图8所示,图中 为位置、速度跟踪误差,为位置、速度控制器的比例增益,为速度控制器积分时间常数、电流环等效时间常数。采用神经网络对非线性磁阻力进行位置域建模、采用分段线性模型对摩擦力进行速度域建模,将扰动模型的输出通过前馈(DMF)补偿到q轴电流指令。LESO则补偿建模不完全的推力波动以及包括随机负载阻力在内的其他等效集总扰动,经过DMF补偿后,残余的扰动幅值将会大幅下降,使得高频扰动成分幅值减小,进一步通过LESO即可对残余扰动进行有效估计并补偿。
为位置、速度跟踪误差,为位置、速度控制器的比例增益,为速度控制器积分时间常数、电流环等效时间常数。采用神经网络对非线性磁阻力进行位置域建模、采用分段线性模型对摩擦力进行速度域建模,将扰动模型的输出通过前馈(DMF)补偿到q轴电流指令。LESO则补偿建模不完全的推力波动以及包括随机负载阻力在内的其他等效集总扰动,经过DMF补偿后,残余的扰动幅值将会大幅下降,使得高频扰动成分幅值减小,进一步通过LESO即可对残余扰动进行有效估计并补偿。
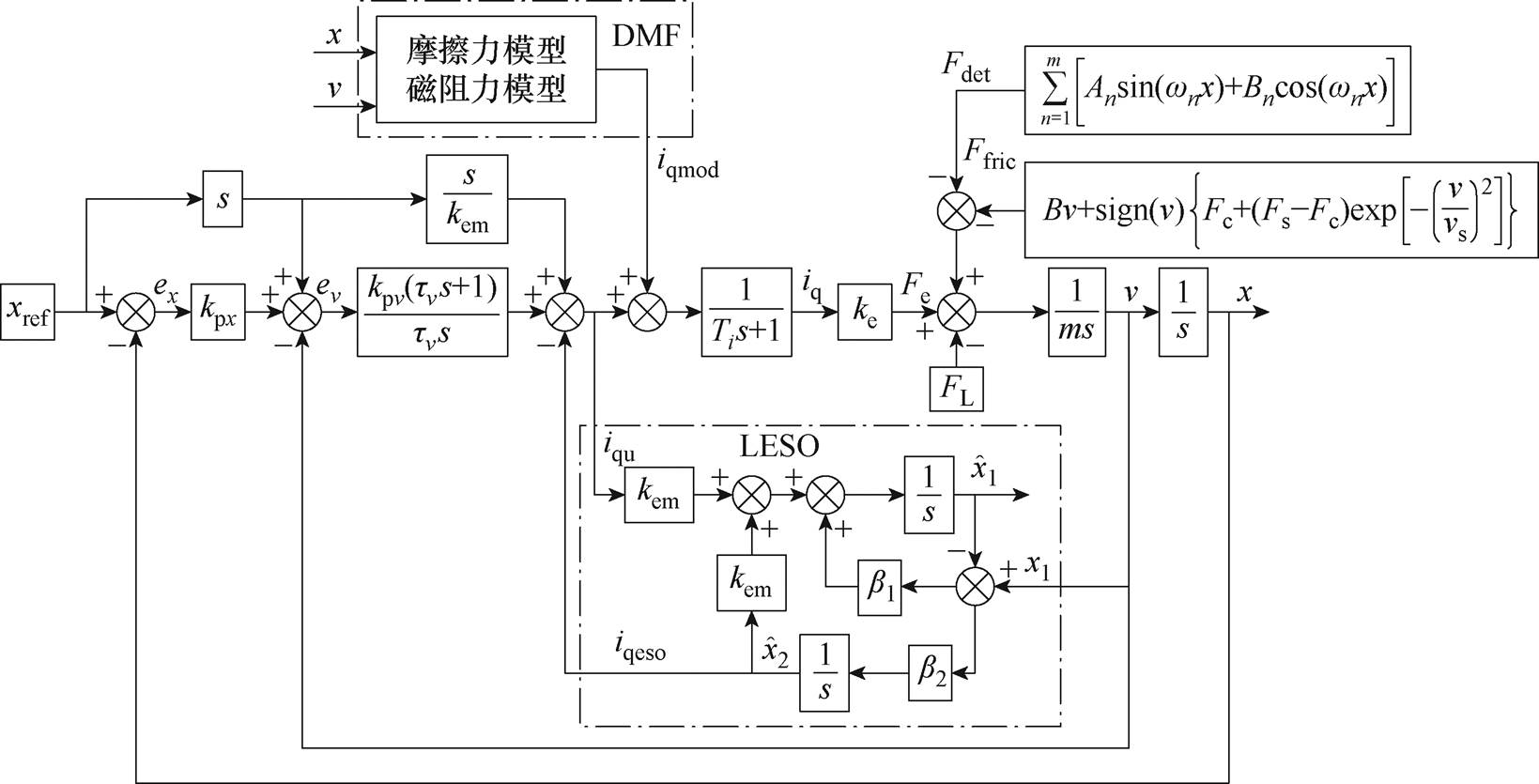
图8 基于DMF与LESO的推力波动复合补偿原理框图
Fig.8 Block diagram of composite compensation principle for thrust fluctuation based on DMF and LESO
为了验证推力波动试验建模前馈补偿和LESO观测器补偿的有效性,依据图8所示推力波动复合补偿策略原理,搭建三闭环试验平台如图9所示,电流环使用PI控制、速度环使用PI控制结合加速度前馈(Proportional-Integral-Feedforward, PIF)、位置环使用P控制结合速度前馈。其中主控芯片采用TI公司的单核定点型数字信号处理器(Digital Signal Processor, DSP)TMS320F2812,另外采用Altera公司的现场可编程门阵列(Field- Programmable Gate Array, FPGA)芯片EP4CE22作为实现电流环调节和矢量控制芯片,逆变器PWM开关频率为8 kHz,所用PMLSM的主要参数见表2。
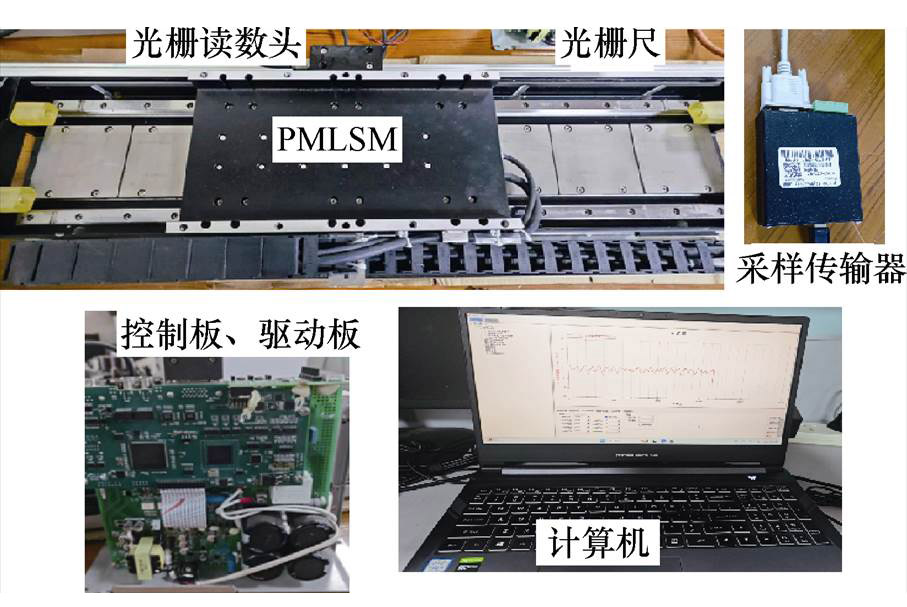
图9 PMLSM试验平台
Fig.9 PMLSM experimental platform
表2 PMLSM参数
Tab.2 Parameters of PMLSM
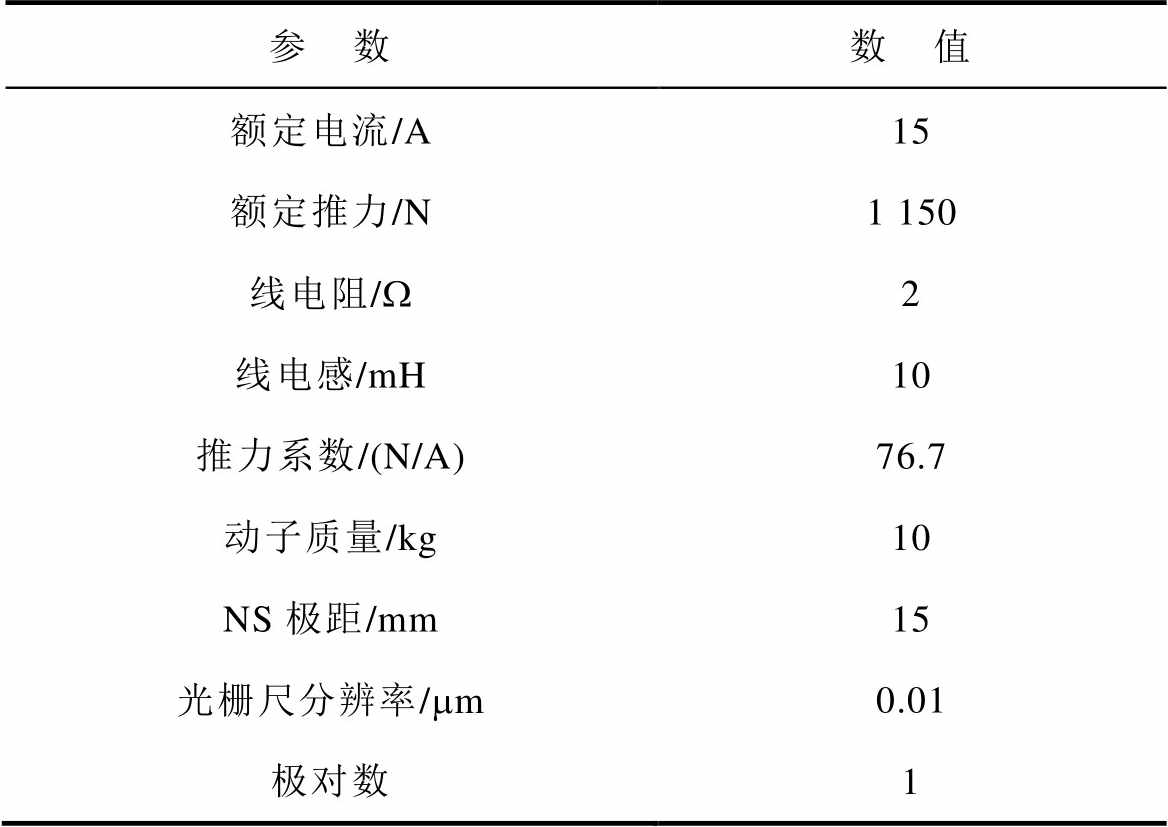
参 数数 值 额定电流/A15 额定推力/N1 150 线电阻/W2 线电感/mH10 推力系数/(N/A)76.7 动子质量/kg10 NS极距/mm15 光栅尺分辨率/mm0.01 极对数1
PMLSM试验系统采用全数字控制,控制器任务由TMS320F2812与FPGA共同完成,其中数字信号处理器(Digital Signal Processor, DSP)为主控制器,其工作频率为150 MHz,FPGA通过DSP的外部扩展接口XINTF的公共存储区域实现信息交互,两者的控制任务分配情况如图10所示。
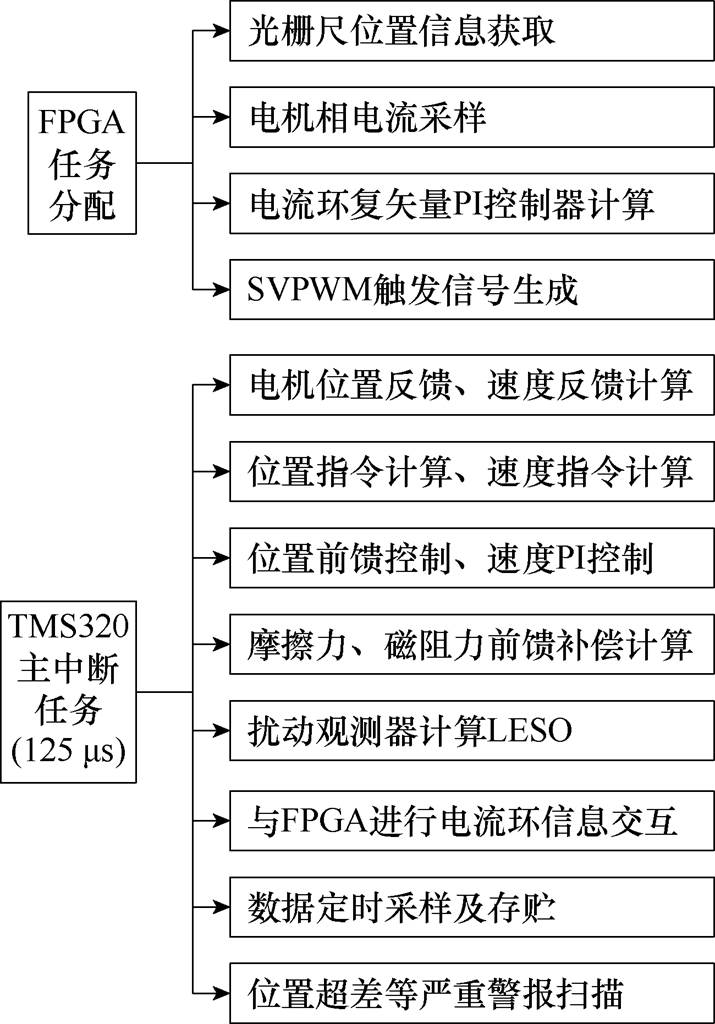
图10 控制器中断任务分配
Fig.10 Interrupt tasks allocation of controller
基于磁阻力神经网络模型实现前馈补偿涉及指数运算,对计算资源消耗较大,通过优化算法实现步骤,该部分计算资源约消耗1 800个指令周期,小于主中断周期125 ms,能够确保控制系统的实时性。
为了验证本文所提推力波动抑制策略的有效性,系统在位置伺服模式下进行试验,采用梯形波位置指令如图11所示,行程120 mm,匀速阶段9 m/min,分别在磁阻力和摩擦力无补偿、使用前馈模型补偿、使用前馈模型和观测器复合补偿下,对比位置跟踪误差如图12所示,其中观测器带宽设置为408 rad/s。
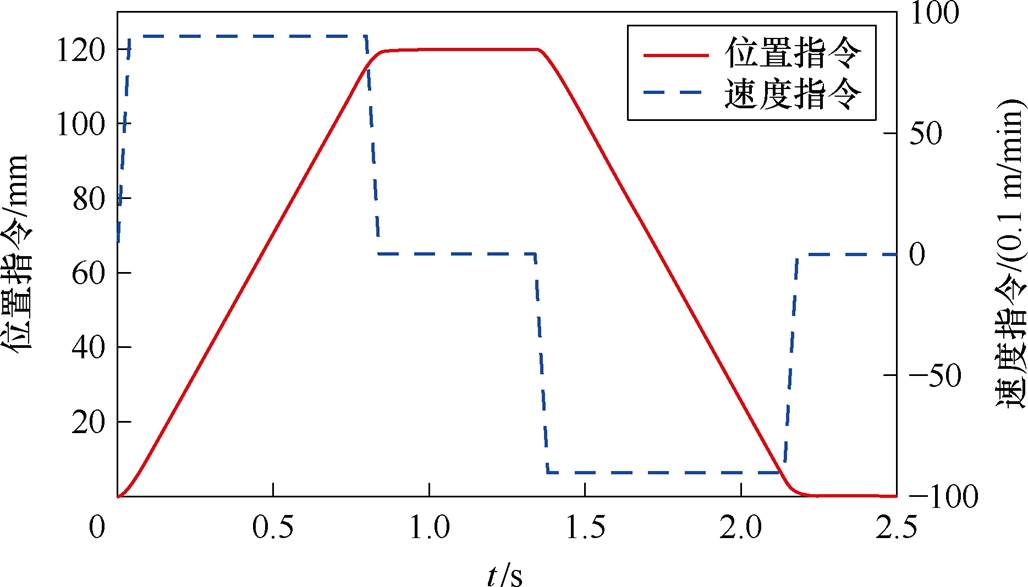
图11 梯形波位置指令和速度指令
Fig.11 Trapezoidal wave position command
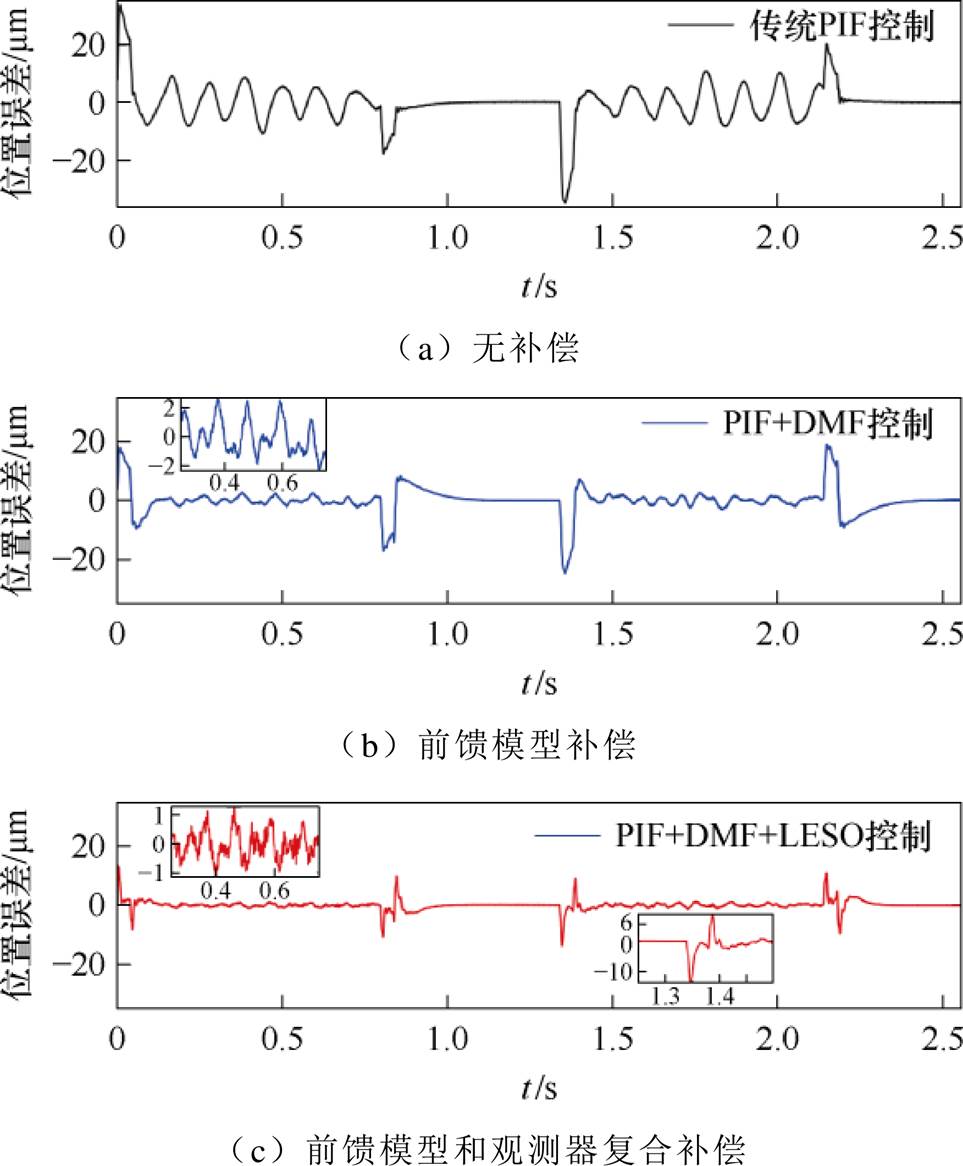
图12 梯形波指令位置跟踪误差
Fig.12 Position tracking error on trapezoidal wave command
分析图12位置误差波形,仅使用前馈模型补偿可将匀速阶段位置跟踪误差峰峰值由传统PIF控制时的21.56 mm降为5.64 mm,使用复合补偿策略可进一步降为2.72 mm。匀速阶段使用模型前馈补偿可降低73.84%的摩擦力加磁阻力的扰动影响,使用复合补偿可降低87.39%的扰动影响。由此可见,观测器能够对前馈模型补偿不完全的磁阻力、摩擦力等扰动进行进一步补偿,提高位置伺服精度。
为了验证本文所提推力波动抑制策略在不同速度下的补偿有效性,分别在2 m/min、4 m/min的速度下使用不同的推力波动补偿策略进行全行程速度伺服试验,对比速度跟踪误差如图13所示。
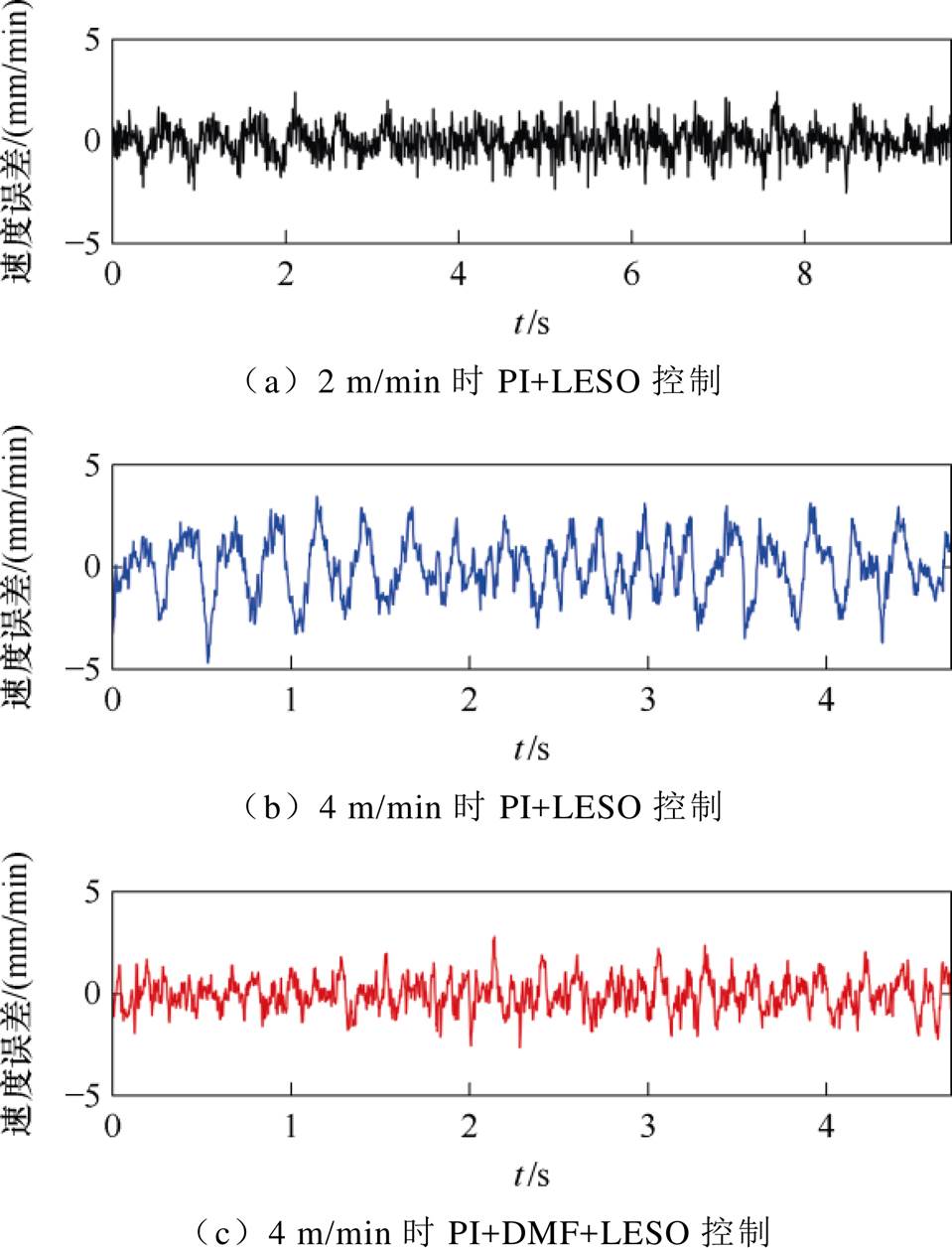
图13 全行程匀速指令速度跟踪误差
Fig.13 Velocity tracking error on full stroke uniform velocity command
由图13可得,在运行速度由2 m/min变为4 m/min后,磁阻力频率将增大一倍,使用PI+LESO控制时对于高频磁阻力补偿性能下降,速度跟踪误差峰峰值从4.21 mm/min增大为8.13 mm/min,与式(11)的分析结果相符合,而使用本文所提PI+ DMF+LESO控制策略后,速度误差峰峰值得以减小为4.46 mm/min。由此可见,本文所提方法中DMF在高速下可加强对磁阻力的补偿效果,结合LESO后能够确保对全频段磁阻力的补偿精度。
PMLSM在工作过程中动子工作台的质量可能会发生变化,这将改变控制对象的特性,主要表现为推力质量比参数kem偏离名义值(控制系统参数设计时的初始值),导致使用名义kem参数计算得到的加速度前馈电流不精确,从而影响复合补偿的效果。图8所示的控制策略中,加速度前馈项、LESO电流输入项均使用了kem参数,从LESO集总扰动的估计思想中可得,kem参数的不确定性将被视为外部扰动的一部分,LESO能够对其进行补偿[28]。为了验证所提控制策略对kem参数的鲁棒性,令kemo为推力质量比的名义值,改变电机动子质量,使得kem参数在50%~150%的名义值范围内变化,设计存在kem参数不确定性时的正弦位置指令试验,指令频率为1/6 Hz,幅值82 mm,对比位置跟踪误差,推力质量比参数的鲁棒性测试如图14所示。
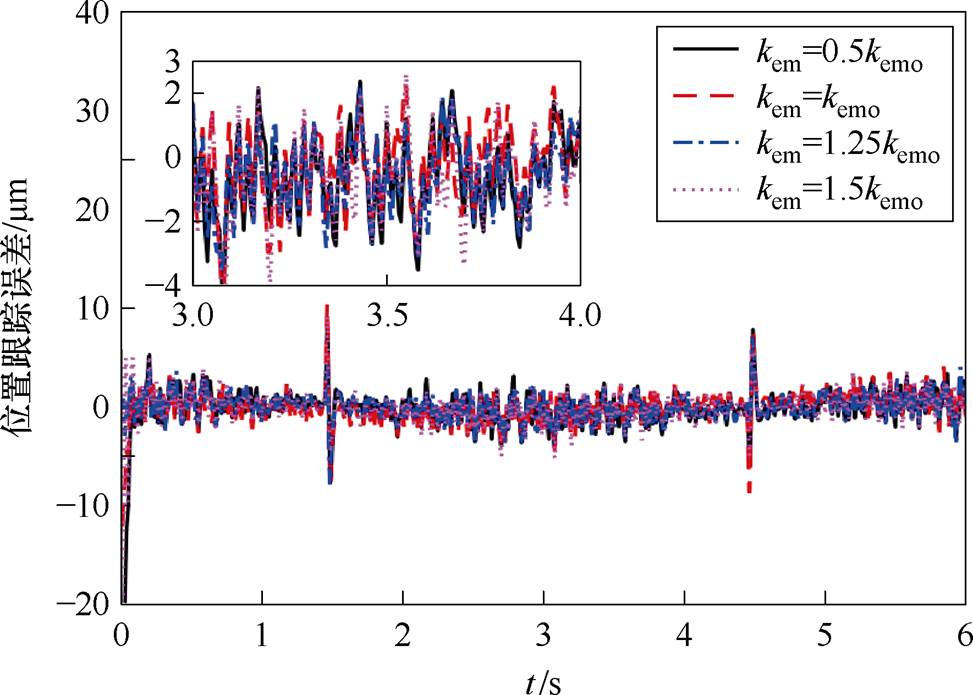
图14 推力质量比参数的鲁棒性测试
Fig.14 Robustness testing of thrust mass ratio parameter
从图14可得,正弦位置指令下,kem参数在50%~150%的名义值范围内变化时,位置跟踪误差几乎未发生改变,均能保持6 mm的稳态误差峰峰值和18 mm的动态误差峰峰值。由此可得,本文所提的推力波动复合补偿策略不仅能够对磁阻力、摩擦力进行有效补偿,对电机质量参数也具有良好的鲁棒性。
本文针对PMLSM磁阻力、摩擦力等推力波动的抑制问题,结合扰动模型和观测器对不同频率扰动的补偿特点,提出了基于DMF和LESO的推力波动复合补偿策略。根据磁阻力谐波分量的位置域周期特性,使用神经网络对其进行建模;根据摩擦力的速度域特性,使用分段线性摩擦模型进行建模。依据两个模型实现前馈补偿,并结合LESO对建模不完全的推力波动进行进一步估计补偿。通过试验验证了本文所提推力波动抑制策略的可行性和有效性,实现了较高的位置伺服动态跟踪精度。此外,该控制策略对电机动子质量参数也具有良好的鲁棒性。不过,本文所提推力波动复合补偿策略也有一定的局限性,比如其对光栅尺位置反馈精度有一定要求,不适用于无位置传感器直线电机伺服系统等。
参考文献
[1] 卢琴芬, 沈燚明, 叶云岳. 永磁直线电动机结构及研究发展综述[J]. 中国电机工程学报, 2019, 39(9): 2575-2588.
Lu Qinfen, Shen Yiming, Ye Yunyue. Development of permanent magnet linear synchronous motors structure and research[J]. Proceedings of the CSEE, 2019, 39(9): 2575-2588.
[2] 冀相, 许金, 黄垂兵, 等. 永磁直线同步电机推力脉动削弱方法综述[J]. 电机与控制应用, 2019, 46(1): 70-74.
Ji Xiang, Xu Jin, Huang Chuibing, et al. Review of methods for reducing thrust ripple of permanent magnet linear synchronous motor[J]. Electric Machines & Control Application, 2019, 46(1): 70-74.
[3] Boff B H B, Eckert P R, Amara Y. A comprehensive review on the end effects of linear permanent magnet machines[J]. IEEE Transactions on Industry Appli- cations, 2023, 59(2): 1728-1741.
[4] 司纪凯, 王海星, 许孝卓, 等. 永磁直线同步电机建模、特性分析及推力控制[M]. 徐州: 中国矿业大学出版社, 2014.
[5] Wang Xuezhen, Chen Feixue, Zhu Renfeng, et al. A review on disturbance analysis and suppression for permanent magnet linear synchronous motor[J]. Actuators, 2021, 10(4): 77.
[6] 韩雪岩, 刘景铭, 朱龙飞. 永磁直线电机端部力抑制措施[J]. 电机与控制学报, 2023, 27(8): 54-63.
Han Xueyan, Liu Jingming, Zhu Longfei. Measures of reducing detent force and design of linear motor[J]. Electric Machines and Control, 2023, 27(8): 54-63.
[7] 杨科科, 任宁宁, 李长乐, 等. 基于辅助铁心的永磁直线同步电机边端力最小化[J]. 电机与控制应用, 2022, 49(8): 47-52.
Yang Keke, Ren Ningning, Li Changle, et al. End force minimization of permanent magnet linear synchronous motor based on auxiliary iron core[J]. Electric Machines & Control Application, 2022, 49(8): 47-52.
[8] Xu Xiaozhuo, Du Han, Du Baoyu, et al. Topology optimization with hybrid algorithm in end teeth of PMLSM[C]//2021 13th International Symposium on Linear Drives for Industry Applications, Wuhan, China, 2021: 1-5.
[9] Ma Mingna, Li Liyi, He Zhu, et al. Influence of longitudinal end-effects on electromagnetic perfor- mance of a permanent magnet slotless linear launcher[J]. IEEE Transactions on Plasma Science, 2013, 41(5): 1161-1166.
[10] 兰志勇, 谢斌, 祝涤非, 等. 基于Ⅴ型三段磁极错位削弱永磁直线电机推力波动的方法[J]. 电工技术学报, 2021, 36(16): 3474-3482.
Lan Zhiyong, Xie Bin, Zhu Difei, et al. Method for weakening thrust fluctuation of permanent magnet linear motor based on Ⅴ-shaped three-stage mag- netic pole misalignment[J]. Transactions of China Electrotechnical Society, 2021, 36(16): 3474-3482.
[11] Lu Shaowu, Tang Xiaoqi, Song Bao, et al. Identi- fication and compensation of force ripple in PMSLM using a JITL technique[J]. Asian Journal of Control, 2015, 17(5): 1559-1568.
[12] Bascetta L, Rocco P, Magnani G. Force ripple compensation in linear motors based on closed-loop position-dependent identification[J]. ASME Transa- ctions on Mechatronics, 2010, 15(3): 349-359.
[13] 仵岳. 基于机理-数据混合模型的直线电机推力波动抑制方法[D]. 沈阳: 沈阳工业大学, 2024.
Wu Yue. Thrust fluctuation suppression method of linear motor based on mechanism-empirical hybrid model[D]. Shenyang: Shenyang University of Tech- nology, 2024.
[14] Song Fazhi, Liu Yang, Xu Jianxin, et al. Iterative learning identification and compensation of space- periodic disturbance in PMLSM systems with time delay[J]. IEEE Transactions on Industrial Electronics, 2018, 65(9): 7579-7589.
[15] Wang Mingyi, Li Liyi, Pan Donghua, et al. High- bandwidth and strong robust current regulation for PMLSM drives considering thrust ripple[J]. IEEE Transactions on Power Electronics, 2016, 31(9): 6646-6657.
[16] Liu Yudong, Wang Mingyi, Zeng G, et al. An improved method for force ripple compensation of PMLSM based on an incremental Kalman filter[C]// 2021 13th International Symposium on Linear Drives for Industry Applications, Wuhan, China, 2021: 1-4.
[17] Yang Rui, Wang Mingyi, Li Liyi, et al. Integrated uncertainty/disturbance compensation with second- order sliding-mode observer for PMLSM-driven motion stage[J]. IEEE Transactions on Power Elec- tronics, 2019, 34(3): 2597-2607.
[18] 张国强, 赵新茹, 张恒, 等. 基于比例谐振内模扩张状态观测器的PMLSM推力波动抑制策略[J]. 电工技术学报, 2024, 39(8): 2449-2458.
Zhang Guoqiang, Zhao Xinru, Zhang Heng, et al. Proportional resonant internal model extended state observer based thrust ripple suppression strategy of PMLSM drives[J]. Transactions of China Electro- technical Society, 2024, 39(8): 2449-2458.
[19] 杨依林, 余海涛, 车志远. 基于MPC的永磁同步直线电机位置控制[J]. 微电机, 2021, 54(8): 57-61.
Yang Yilin, Yu Haitao, Che Zhiyuan. Position control of PMLSM based on model predictive control[J]. Micromotors, 2021, 54(8): 57-61.
[20] 李争, 安金峰, 肖宇, 等. 基于自适应观测器的永磁同步直线电机模型预测控制系统设计[J]. 电工技术学报, 2021, 36(6): 1190-1200.
Li Zheng, An Jinfeng, Xiao Yu, et al. Design of model predictive control system for permanent magnet synchronous linear motor based on adaptive observer[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1190-1200.
[21] 隋延飞, 李旭, 李星占, 等. 基于模糊自抗扰的精密直线电机运动控制[J]. 电机与控制应用, 2020, 47(6): 6-11.
Sui Yanfei, Li Xu, Li Xingzhan, et al. Precise linear motor motion control based on fuzzy ADRC[J]. Electric Machines & Control Application, 2020, 47(6): 6-11.
[22] Shao Ke, Zheng Jinchuan, Wang Hai, et al. Tracking control of a linear motor positioner based on barrier function adaptive sliding mode[J]. IEEE Transactions on Industrial Informatics, 2021, 17(11): 7479-7488.
[23] 赵鑫宇, 王丽梅. 永磁直线同步电机自适应分数阶终端滑模控制[J]. 电工技术学报, 2023, 38(20): 5434-5443.
Zhao Xinyu, Wang Limei. Adaptive fractional-order terminal sliding mode control for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2023, 38(20): 5434-5443.
[24] 方馨, 王丽梅, 张康. 基于扰动观测器的永磁直线电机高阶非奇异快速终端滑模控制[J]. 电工技术学报, 2023, 38(2): 409-421.
Fang Xin, Wang Limei, Zhang Kang. High order nonsingular fast terminal sliding mode control of permanent magnet linear motor based on disturbance observer[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 409-421.
[25] Wang Pan, Xu Yunlang, Ding Runze, et al. Multi- kernel neural network sliding mode control for permanent magnet linear synchronous motors[J]. IEEE Access, 2021, 9: 57385-57392.
[26] 鲍明堃, 周扬忠. 基于复合神经网络重构对象的永磁同步直线电机变参数型位移速度并行控制[J]. 电工技术学报, 2024, 39(8): 2470-2484.
Bao Mingkun, Zhou Yangzhong. Parallel displacement velocity control of permanent magnet synchronous linear motor with variable parameters based on composite neural network reconstruction object[J]. Transactions of China Electrotechnical Society, 2024, 39(8): 2470-2484.
[27] 宋琳, 聂子玲, 孙军, 等. 基于参数辨识的永磁同步直线电机循环神经网络多维观测器[J]. 电工技术学报, 2024, 39(22): 7059-7072.
Song Lin, Nie Ziling, Sun Jun, et al. Multidimensional observer of permanent magnet synchronous linear motor recurrent neural network based on parameter identification[J]. Transactions of China Electro- technical Society, 2024, 39(22): 7059-7072.
[28] 韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008.
Abstract An AC permanent-magnet synchronous linear motor (PMLSM) offers high response speed and control accuracy and is widely used in high-precision manufacturing applications. However, due to its unique physical structure, PMLSM is inevitably affected by thrust fluctuations, including detent and friction forces during movement, which deteriorate the motor’s control performance. To address thrust fluctuation problems in high-precision PMLSM, a composite compensation strategy is designed that combines disturbance model feedforward (DMF) and a linear extended state observer (LESO).
Firstly, based on the physical structure and magnetic field distribution of the PMLSM, the force of the motor mover during motion, along with its position and frequency characteristics of thrust fluctuation, are analyzed. It is found that a high-frequency component of thrust fluctuation occurs at high speed and high dynamic response, leading to an increase in servo error. Therefore, a thrust-fluctuation composite compensation strategy is proposed. Secondly, a neural network is used to model the detent force in the position domain, a piecewise linear friction model is used to model the friction force in the velocity domain, and the residual disturbance after modeling is further estimated and compensated by LESO. In addition, to enhance the tracking performance of the instructions, a two-degree-of-freedom control structure combining differential feedforward and PI control is adopted. Considering the real-time requirement of the servo system, the computational amount of the proposed thrust fluctuation composite compensation strategy is also analyzed.
Finally, the effectiveness of the proposed strategy is evaluated through position and velocity-servo experiments on a PMLSM prototype platform. Trapezoidal-wave-position servo experiments verify the proposed strategy for thrust fluctuation suppression. Additionally, experiments conducted at different speeds confirm that the proposed strategy suppresses thrust fluctuations across the full frequency range. Furthermore, sinusoidal position experiments show that the proposed control strategy provides adequate thrust fluctuation compensation in both steady-state and dynamic conditions, improving the servo performance of the PMLSM system and meeting the real-time computing requirement. The suppression rate of thrust fluctuations reaches 87.39%, with a steady-state position control accuracy of 2.72 mm and a speed control accuracy of 4.46 mm/min at 4 m/min. In addition, the strategy is robust to the mass change in the motor mover.
keywords:Permanent magnet linear synchronous motor, thrust fluctuation, neural network modeling, extended state observer
DOI: 10.19595/j.cnki.1000-6753.tces.250792
中图分类号:TM341
收稿日期 2025-05-13
改稿日期 2025-06-30
李叶松 男,1970 年生,教授,博士生导师,研究方向为数字化交流传动控制系统、智能化控制以及现场总线网络化运动控制。E-mail: yesongli@hust.edu.cn
卢玉清 男,2002年生,硕士研究生,研究方向为永磁同步直线电机运动控制。E-mail: m202373526@hust.edu.cn(通信作者)
(编辑 崔文静)