 (1)
(1)
摘要 为了降低多个电流传感器导致的驱动系统成本和体积升高,同时提高电流控制性能,该文提出一种基于单电流传感器的开关磁阻电机模型预测控制方法。该方法在电机单相导通区域,借助单个母线电流传感器直接获取导通相电流;而在两相导通区域,使用双矢量合成的方法,在单个控制周期中构造出多个开关状态组合。再通过母线电流传感器多次采样分离重构出各相相电流,同时双矢量合成方式也有效降低了电流脉动。最后通过实验验证单电流传感器相电流重构及电流跟踪效果。实验结果表明,所提方法具有较好的控制效果,且在稳态、负载转矩以及转速突变的情况下,所提单电流传感器相电流重构方法能够很好地分离重构出各相相电流。
关键词:开关磁阻电机 模型预测电流控制 双矢量模型预测控制 单电流传感器
开关磁阻电机(Switched Reluctance Motor, SRM)凭借其可频繁起停、高效节能、强适应性、高可靠性的特点,在采矿机械、传送设备、通风设备、提升装置等传统矿业环节中得到广泛应用;而在如今矿业智能化发展中,SRM调速系统的研究更是推动设备升级和产业升级的核心驱动。
在SRM的控制方式中,电流控制能够降低换向时的电流峰值与转矩脉动。电流斩波控制(Chopped Current Control, CCC)通过调节电流限幅值和环宽来进行控制,实现简单,然而其功率变换器的开关频率不固定,且电感值的非线性变化会导致电机换向期间的电流出现脉动和尖峰[1-2]。
模型预测电流控制(Model Predictive Current Control, MPCC)[3-4]作为一种基于模型的最优化控制策略,通过滚动优化处理非线性、多变量系统。MPC分为连续集模型预测控制(Continuous Control Set-MPCC, CCS-MPCC)[5]、有限集模型预测控制(Finite Control Set-MPCC, FCS-MPCC)[6-7],其中FCS-MPCC由于实现简单、无需调制且动态响应好,被广泛应用在电机控制领域。文献[8-9]通过实验验证了FCS-MPCC在异步电机控制中电流动态响应性能更具优势,然而由于FCS-MPCC在一个控制周期中只选择一个基本电压矢量,导致电流脉动较大,影响控制性能。文献[10-11]提出永磁同步电机占空比MPCC策略,在一个控制周期内交替使用最优电压矢量和零矢量,通过改变最优电压矢量的作用时间降低电流脉动。文献[12]在永磁同步电机中引入了双电压矢量(Double Vector, DV)和最优作用时间,减少了电流跟踪误差。
而在SRM的MPCC研究中,文献[13-14]将FCS- MPCC引入SRM驱动系统中,通过离散化电压方程预测获取下一时刻的电流,计算代价函数获得最优电压矢量作用于电机,然而由于SRM功率变换器具有三种电压状态,需要计算27次,计算量较大;文献[15]提出一种优化有限集的FCS-MPCC,通过位置反馈信息分扇区除去冗余状态,减少了计算量。
传统SRM的MPCC需要多个电流传感器,影响了电机驱动系统的体积和成本,因此单电流传感器相电流重构技术的研究对SRM控制系统来说非常重要。在异步电机、永磁同步电机等电机中,单电流传感器相电流重构技术已经有成熟的应用,文献[16]提出一种基于PWM动态调节的开关状态移相法,用于重构永磁同步伺服电机系统的五相电流。文献[17]分析了永磁同步电动机的单电流传感器相电流重构技术,并结合逆变器死区效应分析了重构误差的来源;针对SRM的单电流传感器的研究较少,文献[18]在一台基于滞环控制四相8/6SRM驱动系统中,通过注入双高频脉冲的方法从母线电流中分离出相电流,然而这种高频注入的方式会影响电流的控制效果,降低电机运行效率。
综上所述,以往SRM的FCS-MPC方法存在计算量大、电流跟踪效果较差、换相期间电流脉动大的问题;而针对单电流传感器相电流重构方法的研究,其采用的控制策略多集中于滞环控制等传统方法,而MPCC在该领域的应用研究尚显不足,存在明显的空白。针对上述问题,本文提出一种基于单电流传感器的SRM模型预测控制方法,该方法通过在两相导通区域实现双矢量合成,结合母线单电流传感器重构出相电流。不仅降低了电流传感器的成本,同时也能合理分配电压矢量,减小电流误差。最后在数字信号处理器(Digital Signal Processor, DSP)中编写程序,在样机上进行实验验证了所提方法的有效性。
本文以12/8的三相SRM作为研究对象,忽略相间互感,SRM的相电压方程为
(1)
式中,Up为相绕组端电压;Rs为绕组电阻;yp为相磁链;ip为相电流,ip=yp/Lp(qp, ip),qp为转子机械角度。
将式(1)离散化后得到电流预测的状态方程为
 (2)
(2)
式中,yp(k)、yp(k+1)分别为第k、k+1周期的p相磁链;Up(k)、Lp(k)分别为第k周期的p相电压、电感;ip(k+1)为第k+1周期的p相电流;Ts为采样周期。
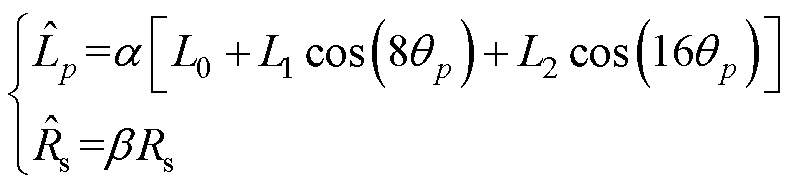
对于12/8结构的SRM,其各相相电感Lp变化周期为p/4,通过傅里叶级数表示,忽略3次及更高次的项,得到Lp的表达式为
 (3)
(3)
其中
 (4)
(4)
式中,L0、L1、L2为将相电感Lp傅里叶展开后的直流、一次、二次项系数;la、lm、lu分别为在相电流ip下,定子极与转子极处于完全对齐位置、中间位置和未对齐位置的电感[19]。
为避免测算的SRM参数不匹配影响MPC效果,本文采用最小二乘法(Recursive Least Squares, RLS)对SRM电感及电阻参数进行辨识[20],由式(1)离散后可得磁链方程为
 (5)
(5)
式中,y0为磁链积分的初始值;a、b为参数修正系数。
参数a、b的辨识模型为
 (6)
(6)
令 ,将k个时刻的观测量
,将k个时刻的观测量 、
、 和输出量
和输出量 转化为矩阵形式X、Y、h,则矩阵形式的误差为E=Y-Xh,构建误差方程为
转化为矩阵形式X、Y、h,则矩阵形式的误差为E=Y-Xh,构建误差方程为
 (7)
(7)
将式(7)求导,并令导数等于0,可得到
 (8)
(8)
令 、
、 且P0>0,于是参数a、b的RLS辨识器方程为
且P0>0,于是参数a、b的RLS辨识器方程为
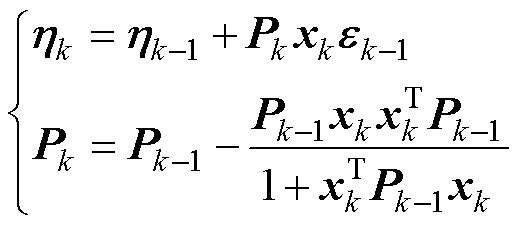 (9)
(9)
因此,校正后的电阻和电感参数为
 (10)
(10)
SRM驱动系统通常采用不对称半桥电路,相电流ip由各相电流传感器采样获得,传统MPC方法通过选择功率变换器状态实现对SRM的控制。其中,各相工作模式根据上下管的开关状态分为如图1所示的三种工作模式:①励磁模式。如图1a所示,上下管同时导通,相绕组接受正向电压,此时ip迅速上升。②续流模式。如图1b所示,上管导通,下管关闭,绕组通过上管及续流管进入,此时ip缓慢下降。③退磁模式。如图1c所示,上下管同时关断,绕组通过两个续流管接受负向电压,此时ip迅速下降。
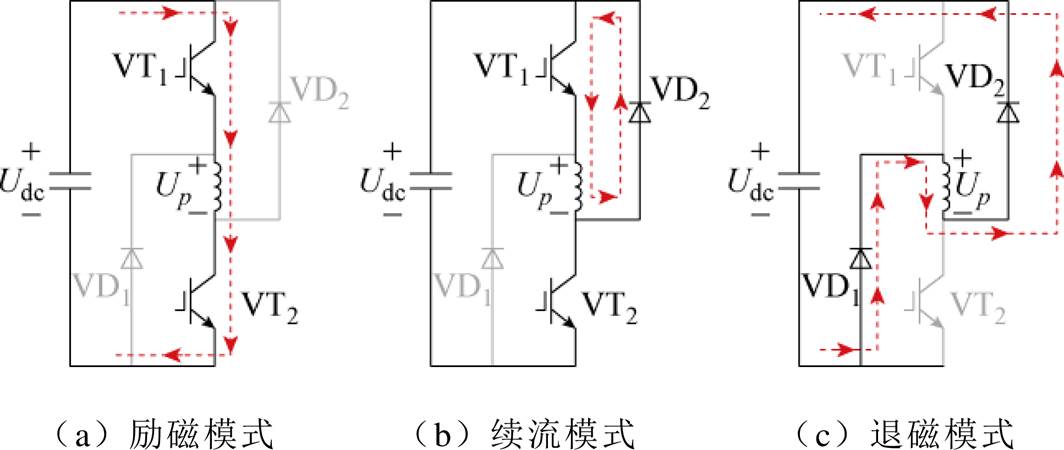
图1 功率变换器的三种工作模式
Fig.1 Three operating modes of power converter
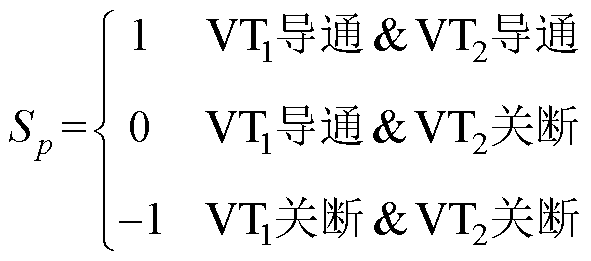 (11)
(11)
式中,Sp为状态函数。
通过式(11)的状态函数表示各相的工作状态,相电压Up可以表示为
 (12)
(12)
式中,Udc为不对称半桥电路直流侧电压。
以各相状态函数的组合表示三相功率变换器的输出状态,可以得到三相12/8 SRM的功率变换器输出状态组合总共33=27种,再依据SRM运行状态优化一部分冗余,其优化原则为同时导通最少一相、最多两相,余下状态有18种变换器工作状态集合见表1。
为避免采样和处理器运算时间带来的延时,引入一拍延时补偿之后,电流预测方程更新为
表1 变换器工作状态集合
Tab.1 The set of operating states of power converter
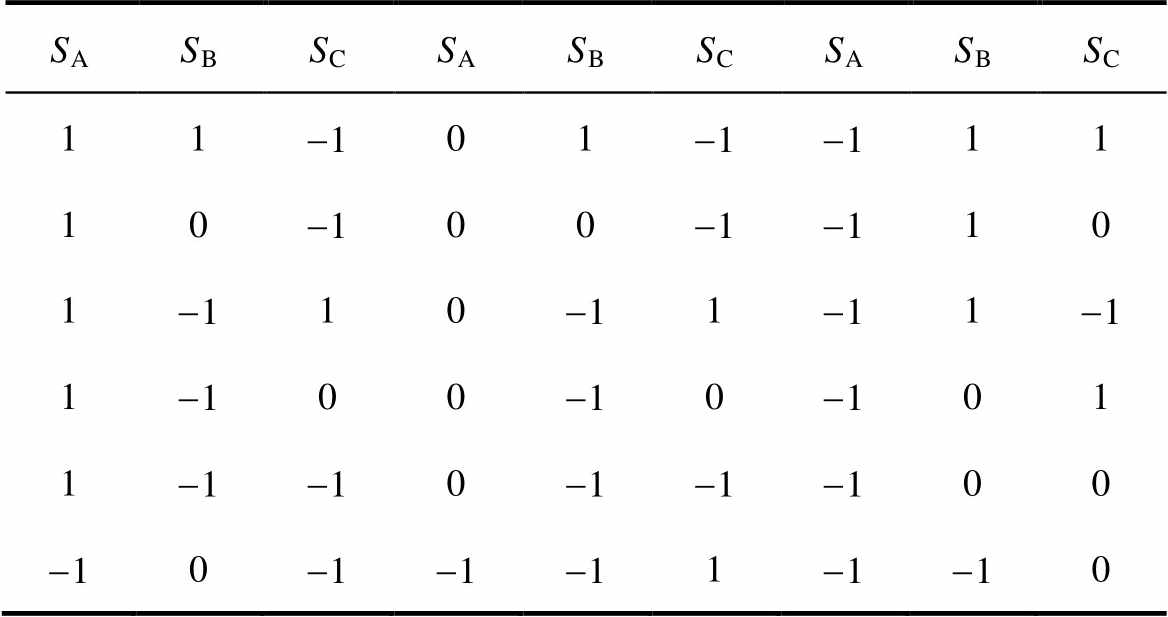
SASBSCSASBSCSASBSC 11-101-1-111 10-100-1-110 1-110-11-11-1 1-100-10-101 1-1-10-1-1-100 -10-1-1-11-1-10
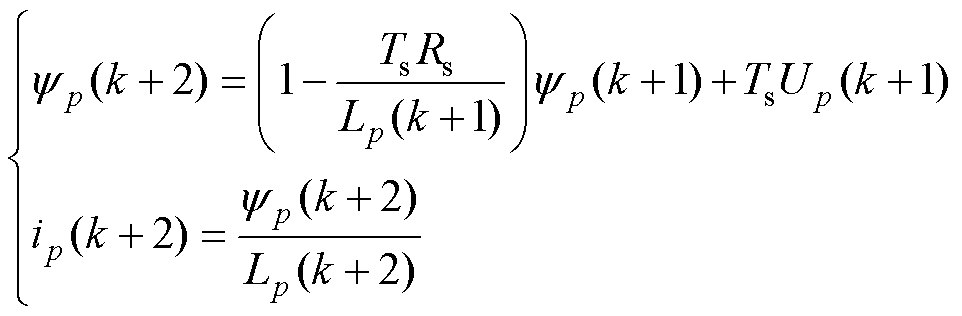 (13)
(13)
为了使得电流误差最小,代价函数J设置为
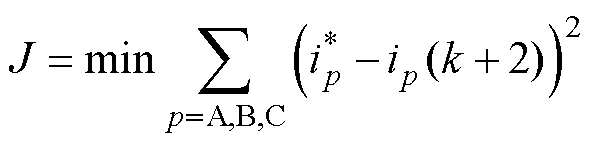 (14)
(14)
式中,ip_ref为p相电流参考值;ip(k+2)为k+2时刻代入化简后的18种工作状态,对应的预测电流。
将ip(k+2)代入式(14)中,计算并取到代价函数最小时的开关状态组合,最后将经过优选的开关信号作用于系统。
图2为传统SRM有限集模型预测电流控制的结构框图。图中,w、wref分别为转速反馈和转速给定值,经过PI控制后得到参考电流ip_ref,通过电机电流传感器获取ip后进行延时补偿预测k+2时刻电流,并通过计算代价函数获取最优状态序列作用于电机。
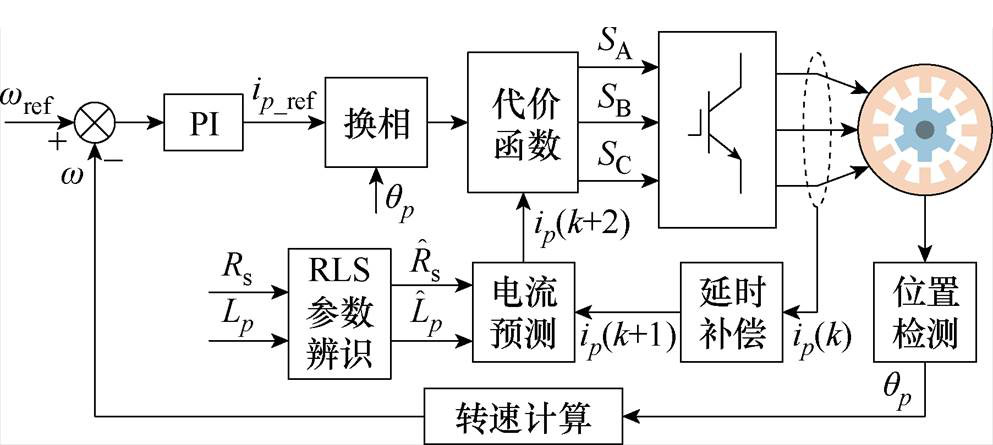
图2 传统SRM的FCS-MPC结构框图
Fig.2 Block diagram of the FCS-MPC for SRM
基于MPCC的SRM驱动系统相较于传统CCC方法、角度控制(Angle Position Control, APC)方法等,凭借代价函数降低了电流、转矩的脉动,然而仍然有如下问题:①FCS-MPCC在一个PWM周期中只选取一个开关状态,在控制频率较低,且直流母线电压较高的情况下,导通相的相电流ip会迅速上升,远超给定电流,反而降低了电流跟踪能力。②传统多个电流传感器采样方案的存在增大了SRM的体积和成本,降低了驱动系统的可靠性。
单电流传感器技术已经在感应电机、永磁同步电机、无刷直流电机中得到了广泛应用。通常是根据功率变换器的母线电流与各相开关状态之间的关系来实现相电流重构。因此,在不对称半桥电路的直流母线侧设置电流传感器,采样母线电流得到ibus,单电流传感器不对称半桥电路如图3所示。
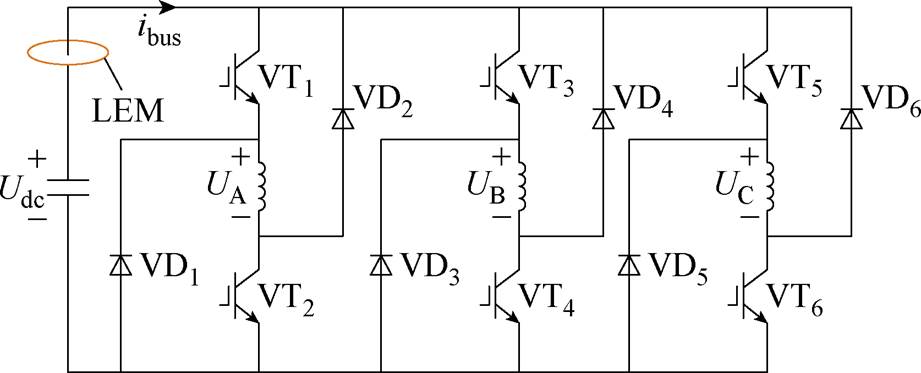
图3 单电流传感器不对称半桥电路
Fig.3 Single-current sensor asymmetric half-bridge circuit
可以得到母线电流ibus的表达式为
 (15)
(15)
由式(15)可以看出,在两相导通、关断相电流不为零时,ibus由两相电流合成,又因为FCS- MPCC在单个控制周期只选择一个电压状态,所以无法分离出相电流。
因此,本文提出一种双矢量合成的MPCC方法,该方法通过在重叠区间使用双矢量合成的方式,在一个PWM周期中选择两个有效电压状态组合和一个零电压状态,计算各个电压状态的作用时间,调制输出PWM控制SRM运行。该方法的优点是,单个PWM周期中存在多个电压状态,降低了电流脉动;同时,该方法在单个PWM周期的母线电流ibus会随着电压状态组合的改变而改变,通过多次采样做差的方法就能分离重构出各相电流。所提基于单电流传感器的双矢量模型预测电流控制(Double Vector-MPCC, DV-MPCC)方法流程如图4所示。
首先根据转子位置来选择待选开关状态组合,分区原则如图5所示。图中,qon为开通角度,qov为两相重叠角度,qoff为关断角。
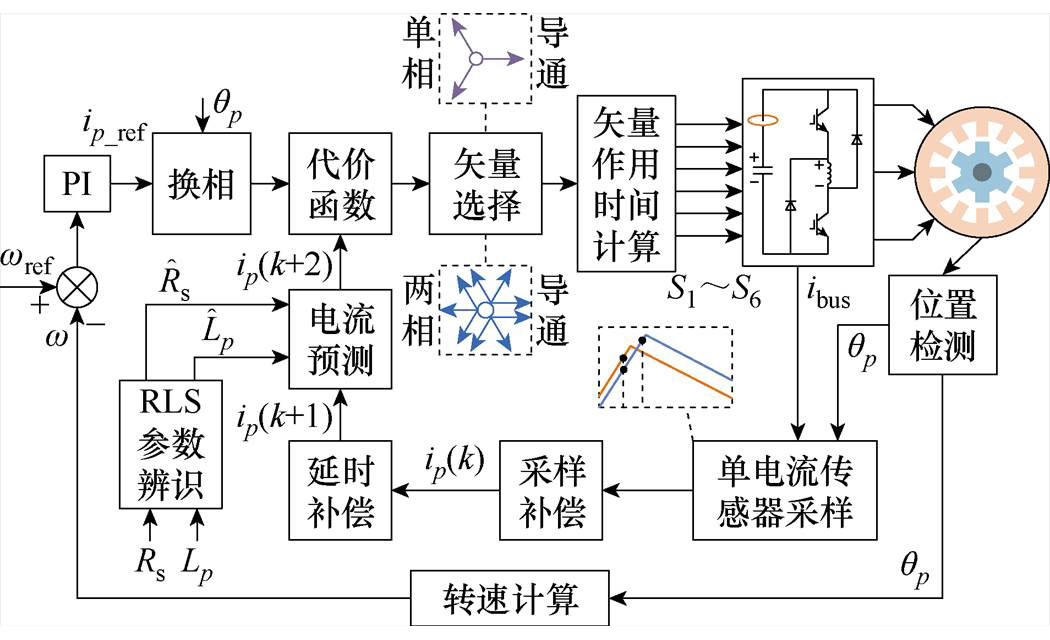
图4 所提基于单电流传感器的DV-MPCC方法流程
Fig.4 Block diagram of the proposed single-current- sensor-based DV-MPC
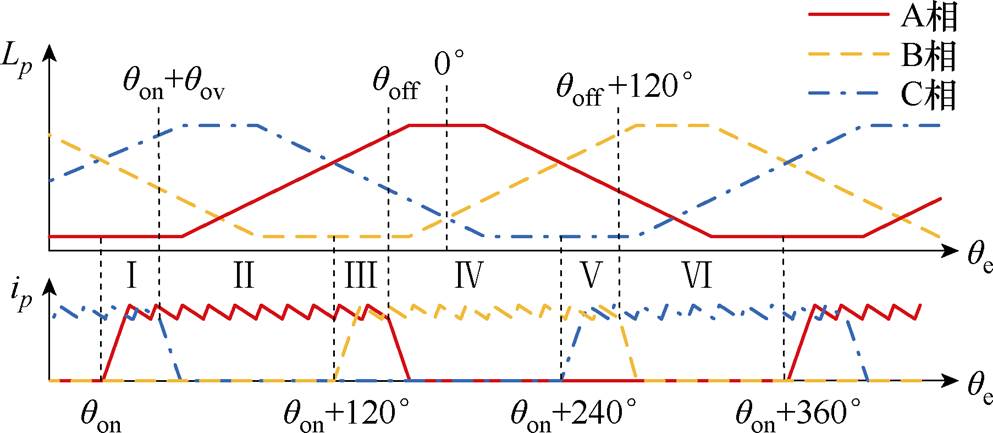
图5 分区原则
Fig.5 Principles of sector division
基于转子位置的各相开关状态见表2。通过表2得到在转子不同位置时的开关状态组合。其中各相状态取“-1”表示该相处于关断状态,此时该相不参与控制,因此在进行矢量合成的过程中不再考虑关断相对矢量的影响。
表2 基于转子位置的各相开关状态
Tab.2 Rotor position-based phase switching states
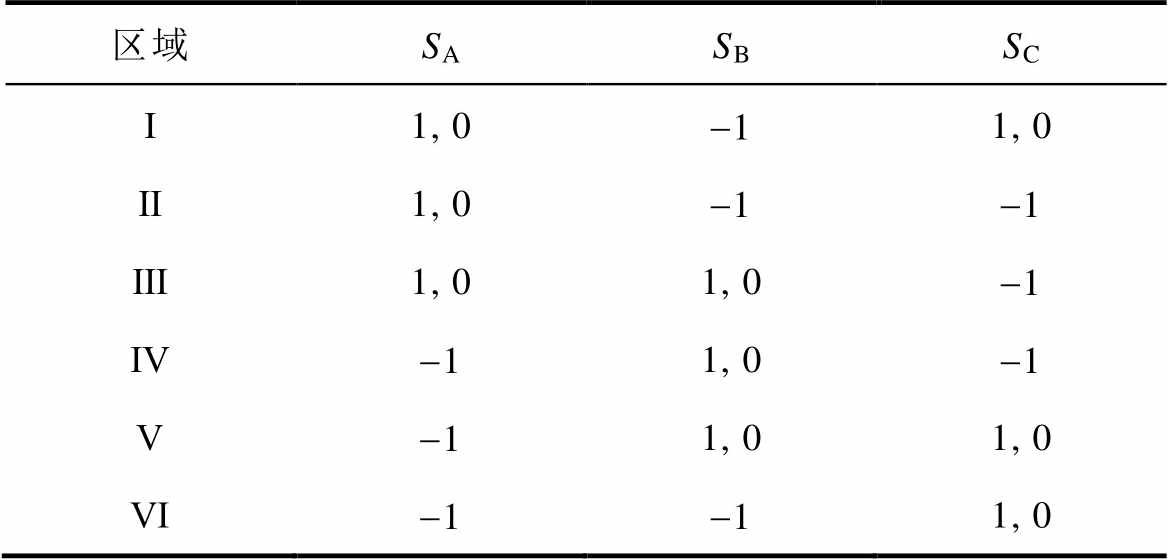
区域SASBSC Ⅰ1, 0-11, 0 Ⅱ1, 0-1-1 Ⅲ1, 01, 0-1 Ⅳ-11, 0-1 Ⅴ-11, 01, 0 Ⅵ-1-11, 0
以A、B相单独导通及两相导通重叠区间为例,忽略了关断相的影响后,定义其矢量空间如图6所示。图6a为A、B相各自单独导通时的矢量图,表示为指向正方向的一维单位矢量;图6b为A、B两相重叠区间的矢量图,其中VⅢ_A、VⅢ_B矢量方向定义为A相、B相的轴向,VⅢ_A&B表示两相同时励磁,方向指向VⅢ_A、VⅢ_B矢量合成方向。
通过式(16)的代价函数作为矢量选择的依据,其占空比计算分为单相和两相导通区域。
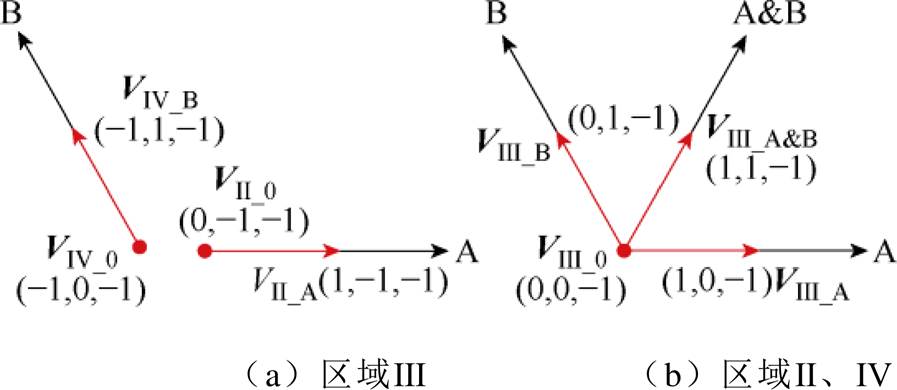
图6 A、B相导通区域矢量图
Fig.6 Voltage vector diagram for phase A-B
 (16)
(16)
如图6所示,在区域Ⅱ、Ⅳ中,只考虑单相导通的电压状态及零电压状态,通过该区域相对应的有效矢量进行合成计算占空比;而在区域Ⅲ中,首先需要根据代价函数在三个有效电压状态中选择最优的两个状态,再选择相应的零电压状态,最后由三个电压状态对应的有效相电压矢量进行合成计算占空比。
相电流示意图如图7所示。可以看到,SRM在运行时,母线电流在单相导通区即为励磁相电流,直接采样母线电流即可;而在重叠区间中,母线电流为两相电流之和,因此需要结合双矢量合成的方法,在该区域母线电流上构造单相电流和两相电流之和两种状态来重构相电流;而在重叠区间的单相励磁区中,由于退磁电流的存在,母线电流依然会出现两相之和的状态,但由于另一相处于调制状态,因此两次采样也能重构出导通相电流。
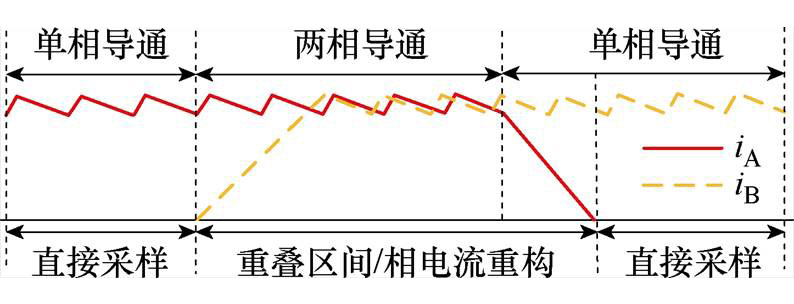
图7 相电流示意图
Fig.7 Phase current schematic diagram
下文分重叠区间的两相导通区域和单相导通区域介绍相电流重构的原理。
1)两相导通区域
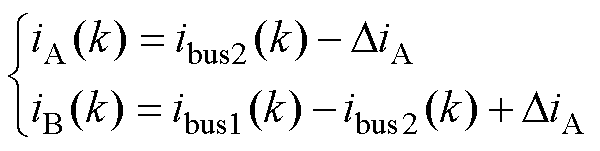
如图8所示为两相导通时的电流采样方案。图8中,Ts为一个PWM周期时间,取两相脉冲信号下降沿即图中t1、t2为采样时刻,以t1时刻为采样基准点,于是采样电流iA(k)、iB(k)分别为
 (17)
(17)
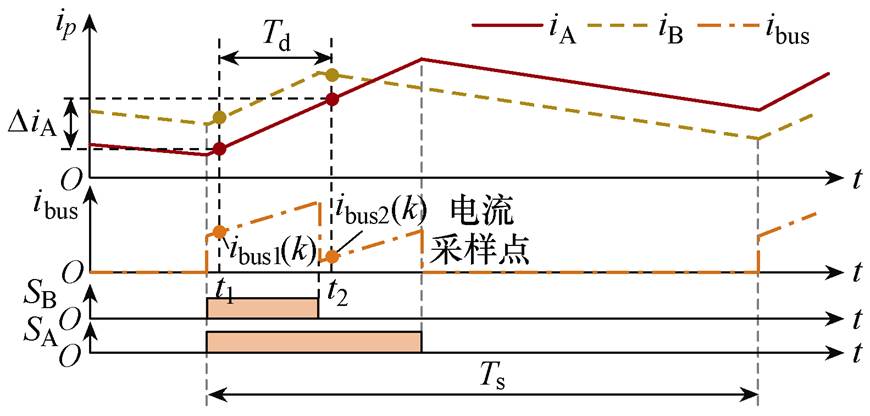
图8 重叠区间相电流及母线电流波形
Fig.8 Phase current and bus current waveforms in overlapping intervals
式中,DiA为两次采样的间隔导致的A相电流误差;ibus1(k)、ibus2(k)为k时刻两次电流采样值。
由式(17)可知,相电流重构误差即由DiA决定,进一步分析采样误差。在采样区间tÎ(t1, t2)时,认为反电动势Ueemf部分不变,采样间隔为Td,则DiA表达式为
 (18)
(18)
理想A相电压 和实际A相电压UA之间的误差可以表示为
和实际A相电压UA之间的误差可以表示为
 (19)
(19)
其中
 (20)
(20)
式中,trise-delay和tfall-delay分别为器件上升、下降延迟时间;ttrans-delay为传输延迟时间。
考虑IGBT的导通饱和管压降为
 (21)
(21)
式中,Uce0为初始饱和压降;Rce为饱和等效电阻。
续流二极管的管压降为
 (22)
(22)
式中,Ud0为初始二极管导通压降;Rd为续流二级管等效电阻。
因此,实际的相电压表示为
 (23)
(23)
采样误差DiA更新为
 (24)
(24)
由式(24)可知,影响重构误差率的因素主要来自于采样间隔、电机参数、选择的功率器件IGBT/二极管开通关断延时、导通压降导致的直流母线电压损失,为了降低重构误差,电机参数在第1节中采用了最小二乘法进行辨识;除去器件带来的损耗,降低采样间隔Td也能降低重构误差率,同时所选电压状态组合作用时间需要维持一个最小采样时间Tmin以防止采样死区,即
 (25)
(25)
式中,TV为所选电压状态组合作用时间;Tmin为最小采样时间;tA-D为A-D采样和转化时间;tsett为直流母线电流有限稳定时间。
因此,采取相移法并修改采样点,在如图9a所示,Td>Tmin,此时两次采样时间间隔较长,Td较大,导致重构误差DiA较大,通过移相将占空比较小的B相脉冲下降沿右移Tmin,选择A相上升沿延迟1 ms作为采样点1,B相上升沿延迟1 ms作为采样点2,保证采样间隔为Tmin。如图9b所示,TV<Tmin,此时(1, 0)状态的电流由于处于采样死区,无法获取电流,进而导致重构失败,因此通过将B相脉冲右移增大Tmin,保证采样成功。
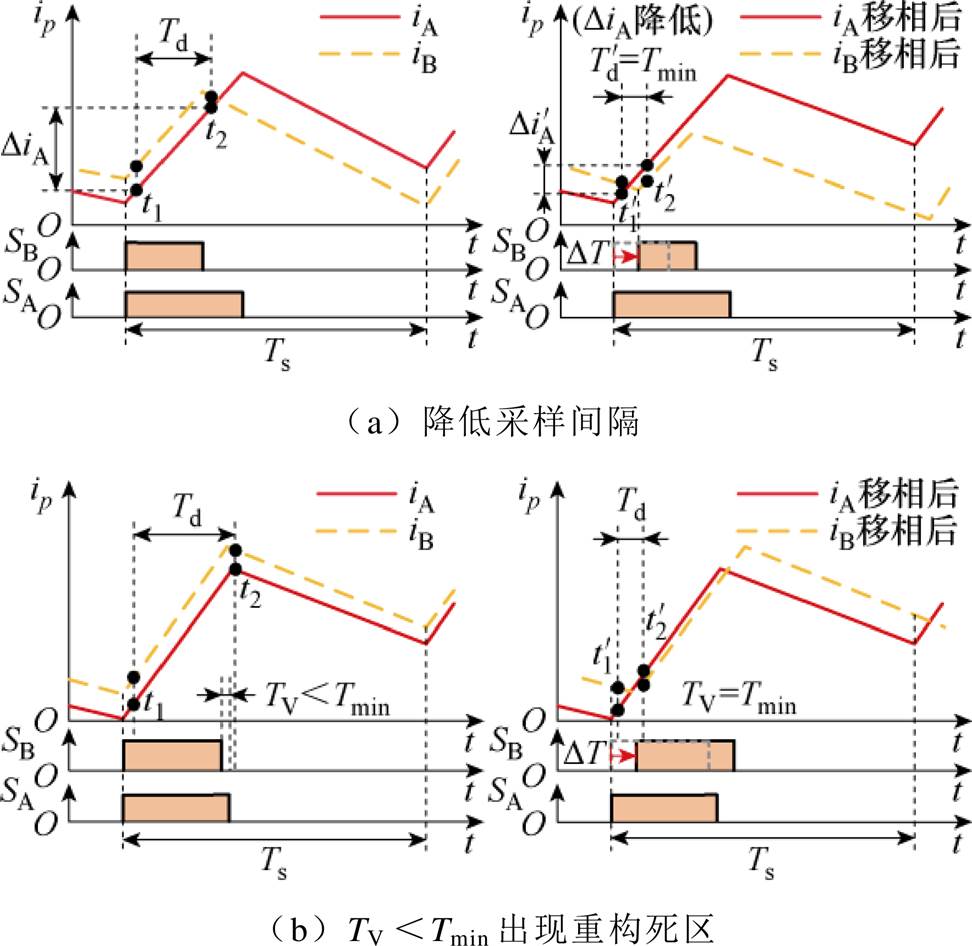
图9 相移后电流波形及采样点
Fig.9 Current waveforms and sampling points after phase shift
2)单相导通区域
如图10所示为重叠区间单相励磁时的相电流及母线电流波形,其采样电流及误差分析与两相励磁区域相同。
占空比计算分为单相导通区域及两相导通区域分别计算。
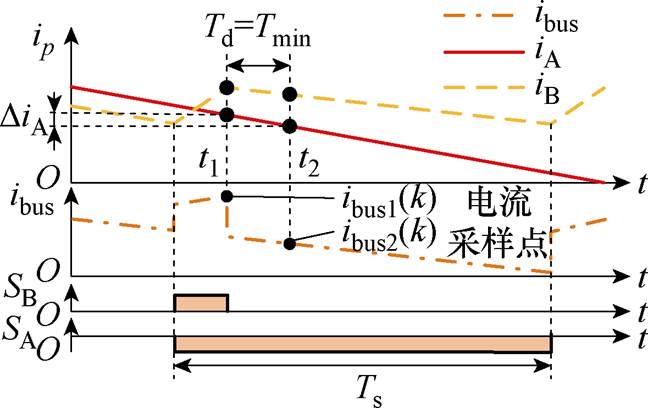
图10 单相导通区间相电流及母线电流波形
Fig.10 Phase current and bus current waveforms in single-phase conduction region
1)区域Ⅱ、Ⅳ、Ⅵ
在单相导通区域中非导通相不参与矢量合成,于是选择一个有效的一维矢量和一维零矢量进行合成,表示为
 (26)
(26)
式中,Vs为合成矢量;Vsi为所选的有效矢量;Vs0为零矢量;d为有效矢量占空比。
为了计算式(26)中的d,以A相为例,其电流预测的方程为
 (27)
(27)
其中
式中,Si、S0为给p相绕组施加所选电压矢量后的电流轨迹斜率。
为了使iA(k+2)跟随给定电流iref,iref为电流参考值,将iref代入式(27),可以得到占空比d的表达式为
 (28)
(28)
2)区域Ⅰ、Ⅲ、Ⅴ
两相重叠导通区域,选择两个有效矢量与一个零矢量分两次合成,表示为
 (29)
(29)
式中,Vsj为所选第二个有效矢量;d1、d2为两次矢量合成所计算的占空比。
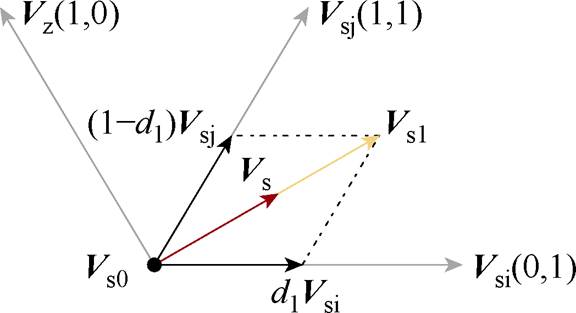
图11 两相导通区域矢量合成
Fig.11 Voltage vector diagram for two-phase conduction region
为了计算式(29)中d1的值,A、B相的电流预测方程为
 (30)
(30)
其中
式中,Sj为给A、B相绕组施加所选电压后的电流轨迹斜率。
代入参考电流值iref可以得到首次占空比d1的表达式为
 (31)
(31)
式中,dot( · )表示内积运算;norm( · )为范数运算。
于是首次得到的合成电压矢量Vs1的表达式为
 (32)
(32)
进一步加入零矢量进行调制,则可以得到i(k+2)的表达式为
 (33)
(33)
其中
式中,Ss1为给p相绕组施加所选电压后的电流轨迹斜率。
将iref代入式(33)中,可以得到第二次计算占空比得到的d2的表达式为
 (34)
(34)
在单相导通时,即区域Ⅱ、Ⅳ、Ⅵ中,通过占空比计算其作用时间,于是有效矢量作用时间T1及零矢量作用时间T0为
 (35)
(35)
导通相保持上管一直导通,下管用于调制,在DSP中输出及采样时机如图12所示,通过设置比较A寄存器(Counter Compare A Register, CMPA)实现脉宽调制(Pulse Width Modulation, PWM)翻转,将增强型脉宽调制(Enhanced Pulse Width Modu- lation, ePWMxA)波的上升沿延迟1 ms数据存入比较点寄存器CMPC输出开始转换信号启转A(Start-of- Conversion A, SOCA)触发A-D采样。
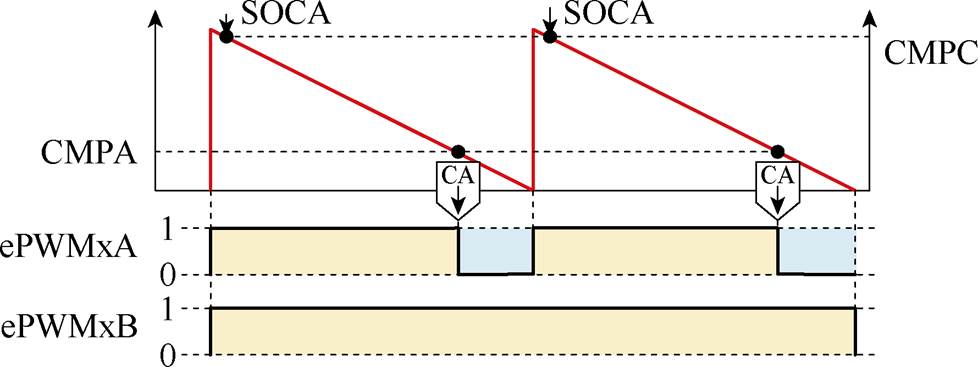
图12 单相导通区间开关状态顺序
Fig.12 Switching state sequence diagram in single-phase conduction region
在两相导通时,即区间Ⅰ、Ⅲ、Ⅴ中,令有效矢量Vsi、Vsj作用时间分别为T1、T2,零矢量作用时间为T0,得到各矢量作用时间为
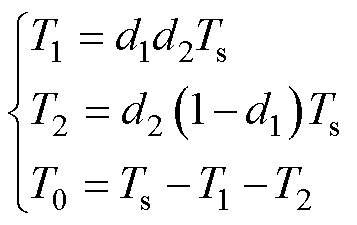 (36)
(36)
在DSP中实现移相及采样时刻的时机如图13所示,通过设置比较点CMPA、CMPB实现移相,ePWMxB上升沿及CMPA延迟形成的CMPC、CMPD输出SOCA、SOCB进而触发A-D采样,移相长度DT= Tmin=5 ms。
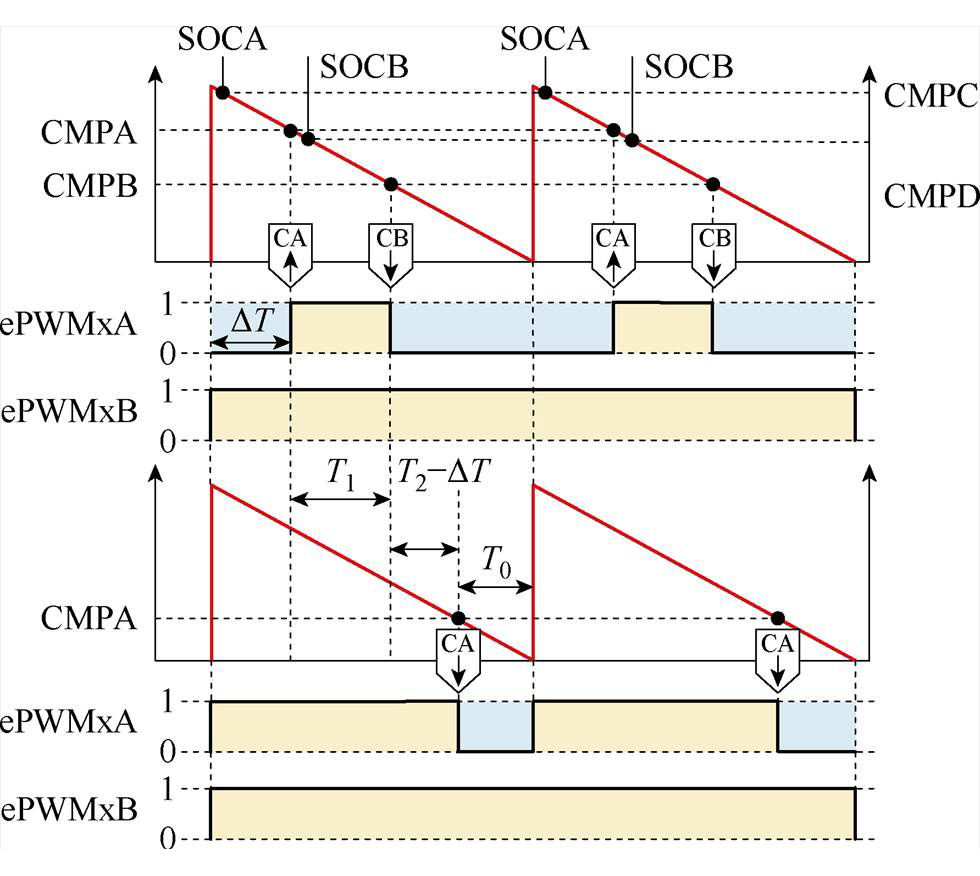
图13 两相导通区间开关状态顺序
Fig.13 Switching state sequence diagram in two-phase conduction region
为了验证所提DV-MPCC的电流控制效果和单电流传感器相电流重构效果,搭建如图14所示的以TMS320F28379D为控制核心的实验平台来验证所提控制方法。使用的12/8SRM样机参数见表3。
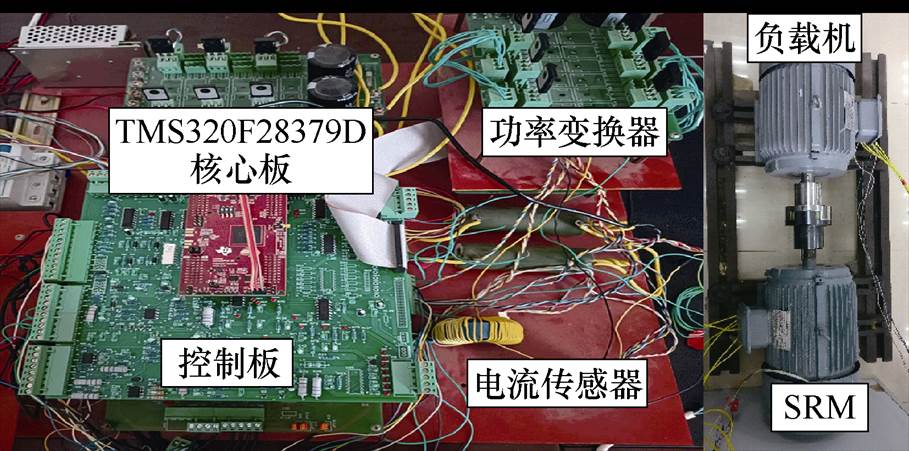
图14 实验平台
Fig.14 Experimental platform
表3 SRM样机电机参数
Tab.3 Parameter table of SRM prototype

参 数数 值 相电阻/W1 额定电流/A11.7 额定转速/(r/min)1 500 直流母线电压/V500 最小电感/mH10.6 最大电感/mH251.9
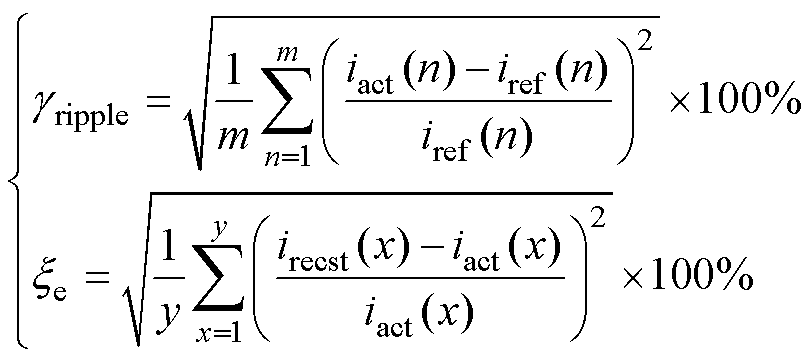
图15为FCS-MPCC、所提DV-MPCC及使用单电流传感器的DV-MPCC方法在100 r/min下的电流和重构波形,负载转矩设置为12 N·m,电流稳定值为5.5 A,控制周期为200 ms。
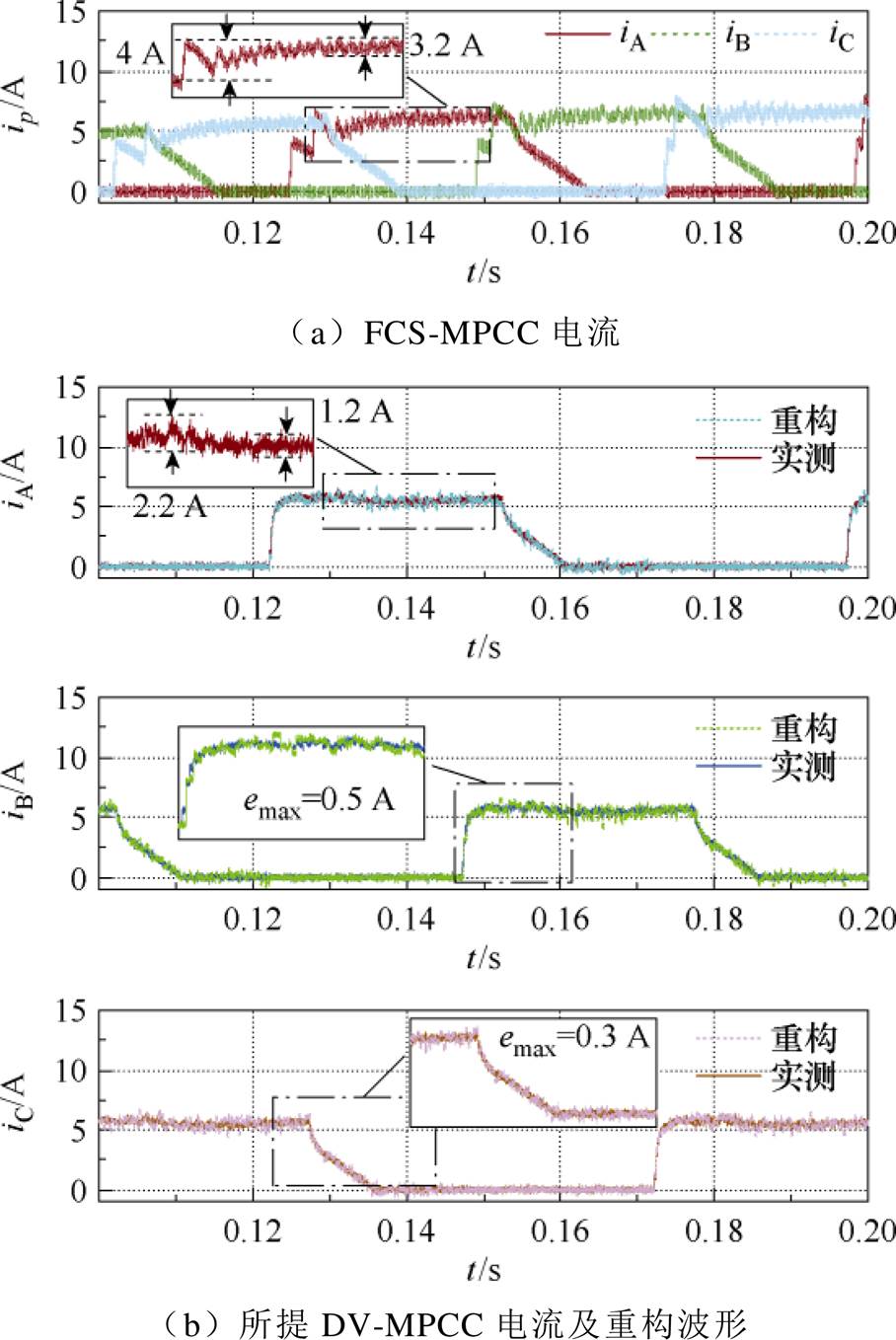
图15 100 r/min两种控制策略的电流及重构波形
Fig.15 Current waveforms and reconstructed waveforms of two control strategies at 100 r/min
图15中,emax为最大重构误差。为了进一步量化电流控制性能和相电流重构效果,定义电流脉动率和重构误差率为
 (37)
(37)
式中,gripple为电流脉动率;xe为重构误差率;m和y为样本点数,实验中取100个样本点;iact为实际电流;irecst为重构电流。
如图15a所示,FCS-MPCC方法电流脉动较大,电流脉动率为24.12%,最大电流脉动为4 A,相比之下,图15b所示的使用所提DV-MPCC方法能够有效地降低电流脉动,其电流脉动率gripple为9.61%,最大电流脉动值为2.2 A。稳态条件下,平均重构误差为0.35 A,重构误差率xe为4.16%。
图16为500 r/min下两种控制策略的电流及重构电流波形。电流稳定值为6 A,其中图16a表明,FCS-MPCC方法最大电流脉动为3.7 A,电流脉动率为28.16%,如图16b所示,所提DV-MPCC方法最大电流脉动值为2.2 A,电流脉动率gripple为11.7%,稳态条件下,平均重构误差为0.65 A,重构误差率xe为5.83%。
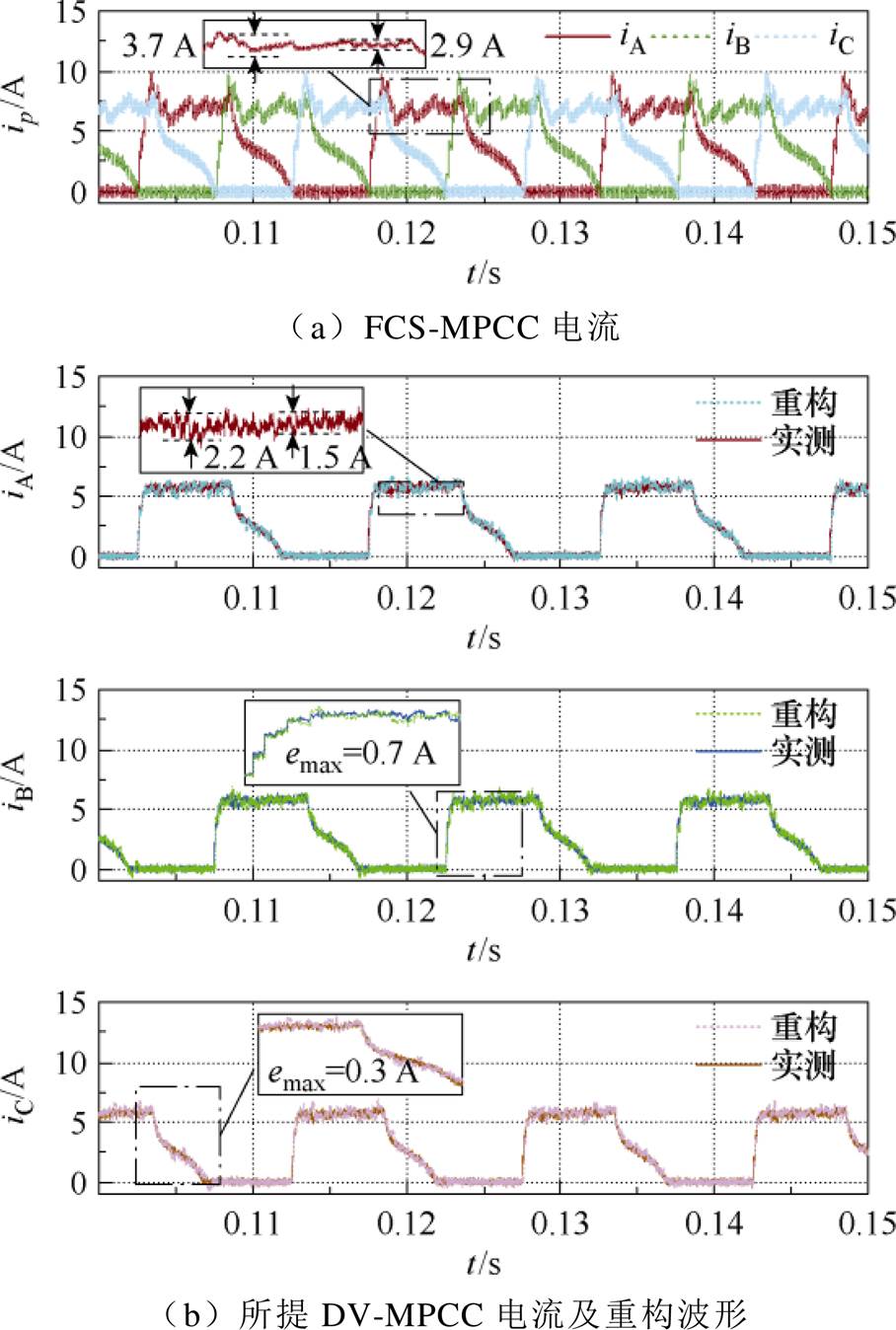
图16 500 r/min两种控制策略的电流及重构波形
Fig.16 Current waveforms and reconstructed waveforms of two control strategies at 500 r/min
图17所示为所提DV-MPCC方法在负载12 N·m下的从400 r/min提速至600 r/min的动态过程及其电流重构电流波形,在0.2 s转速提速,整个动态过程14 ms,平均重构误差 为0.3 A,重构误差率xe为6.03%。
为0.3 A,重构误差率xe为6.03%。
图18所示为所提DV-MPCC方法在500 r/min条件下负载转矩从6 N·m提升到12 N·m的动态过程及其电流重构波形,在0.2 s增加负载转矩,整个动态过程10 ms,平均重构误差为0.3 A,重构误差率xe为5.77%。
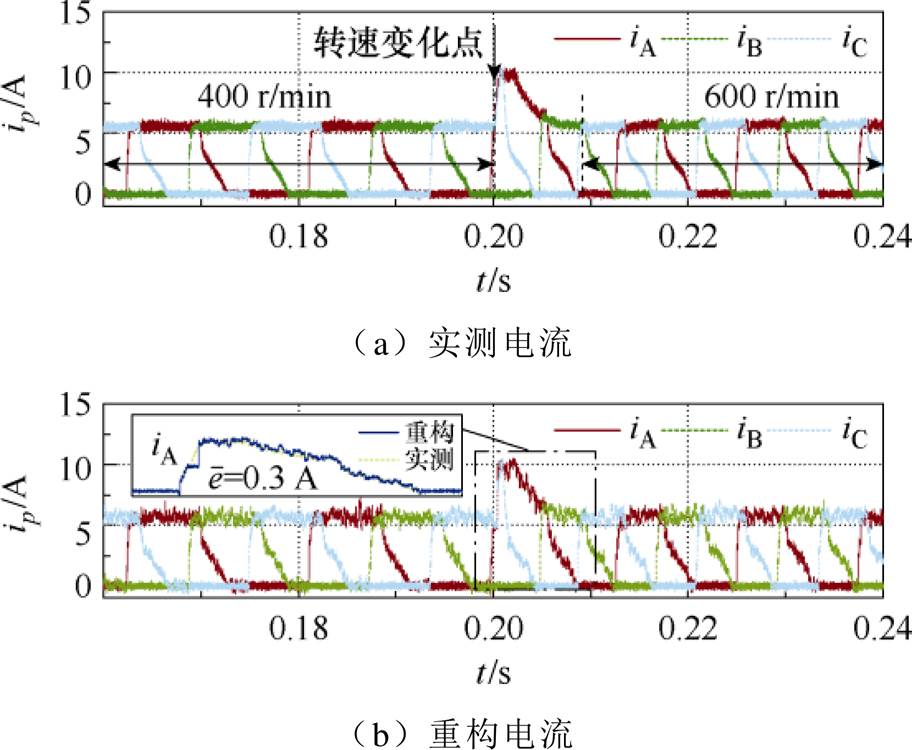
图17 12 N·m负载转矩下400 r/min提速至600 r/min
Fig.17 Transient response at 12 N·m load torque (400 r/min to 600 r/min sweep)
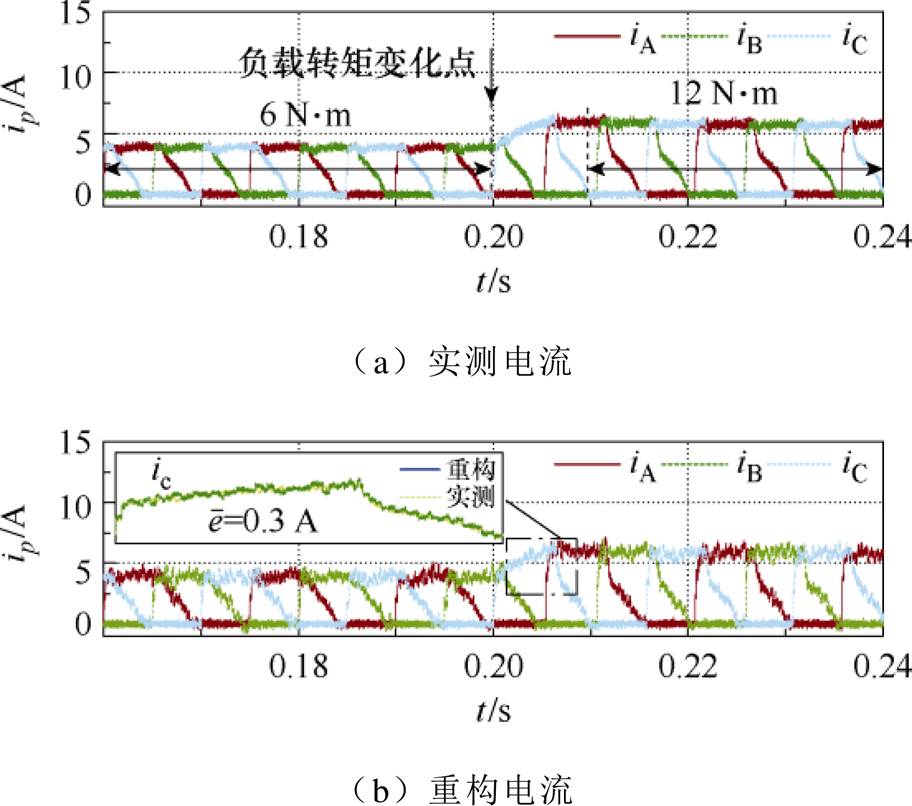
图18 500 r/min下负载6 N·m提升到12 N·m
Fig.18 Transient response to load torque change (6 N·m to 12 N·m) at speed of 500 r/min
代入相关参数,通过式(24)计算得到重构误差DiAÎ(0.277 A, 0.8 A),实验结果符合预期。
为了验证所提方法对转矩脉动的优化效果及重构误差对电流脉动的影响,定义转矩脉动系数κ为
 (38)
(38)
式中,Te_max和Te_min分别为运行过程中的最大、最小转矩。
图19、图20所示为1 000 r/min、1 200 r/min下两种方法转矩的对比。可以看出,FCS-MPCC方法造成的转矩脉动较大,为69%和67%,而所提DV-MPCC的转矩脉动系数能够降低至30%和35%,有效地降低了转矩脉动。
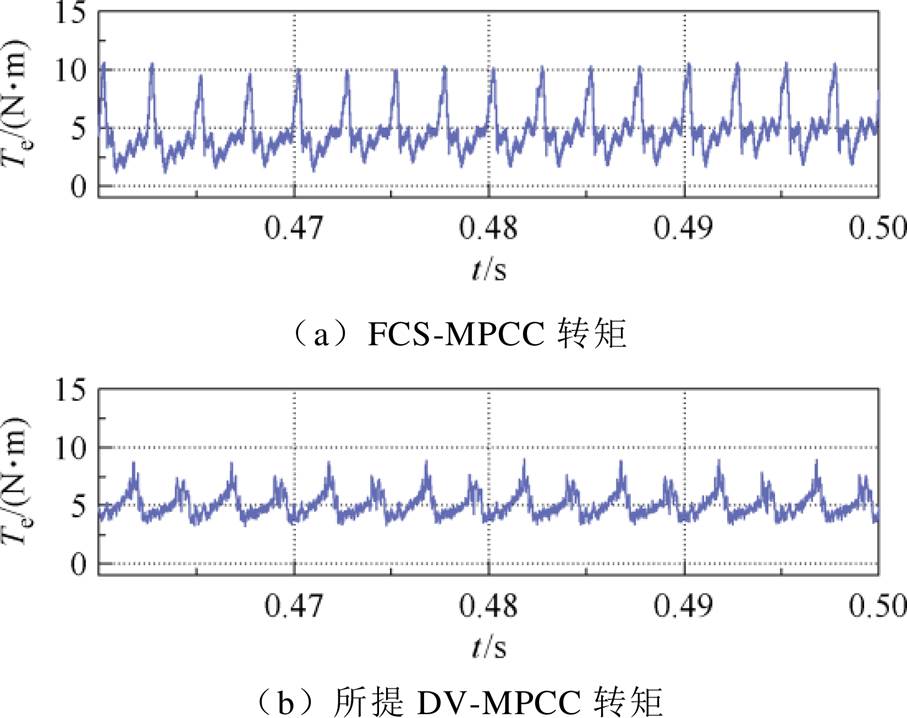
图19 1 000 r/min下两种控制策略的转矩波形
Fig.19 Torque waveforms diagrams of two control strategies under 1 000 r/min
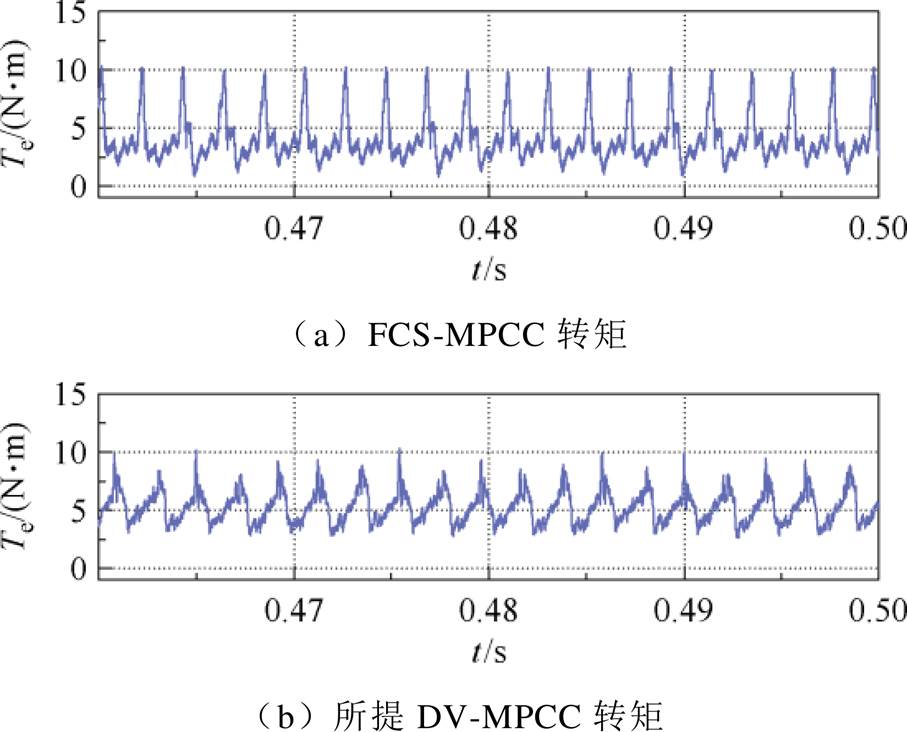
图20 1 200 r/min下两种控制策略的转矩波形
Fig.20 Torque waveforms of two control strategies under 1 200 r/min
重构误差对转矩脉动的影响如图21所示,图中,Te_rec和Te_act分别为使用重构方法的转矩和未使用重构方法产生的转矩,在1 000 r/min、1 200 r/min条件下,重构误差导致的转矩脉动系数变化了0.7%和0.9%,因此所提方法造成的电流重构误差对转矩脉动造成的影响较小。
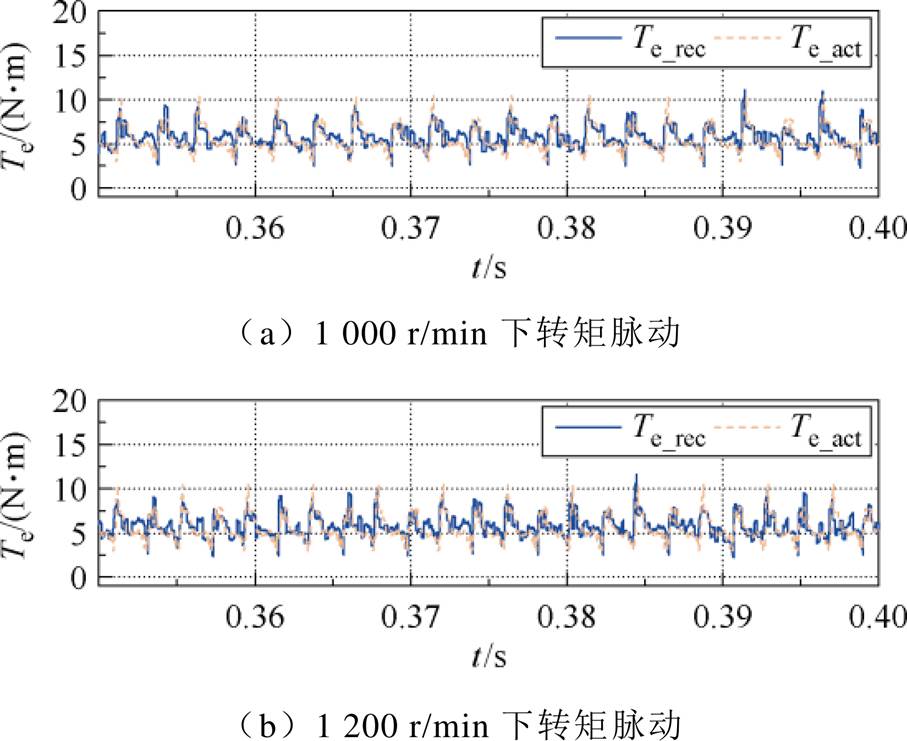
图21 重构误差对转矩脉动的影响
Fig.21 Impact of reconstruction error on torque ripple
本文所提基于单电流传感器的开关磁阻电机DV-MPCC方法在传统单状态选取的FCS-MPCC基础上,对其算法及电流采样方式改进优化。该方法通过在两相导通区域借助双矢量合成的方法实现了固定的开关频率,并有效地降低了电流脉动;且多个开关状态的存在实现了单电流传感器相电流重构。通过实验验证,与FCS-MPCC相比,所提方法能够降低电流脉动,具有较好的跟踪效果,且在控制效果接近的情况下减少了两个电流传感器,降低了驱动系统的成本和体积,具有一定的应用前景。
参考文献
[1] 李宗霖, 陈昊, 戚湧, 等. 基于自抗扰滑模控制的开关磁阻电机转矩分配控制策略[J]. 电工技术学报, 2024, 39(18): 5639-5656.
Li Zonglin, Chen Hao, Qi Yong, et al. Torque sharing function control strategy for switched reluctance motor based on active disturbance rejection sliding mode control[J]. Transactions of China Electro- technical Society, 2024, 39(18): 5639-5656.
[2] 方成辉, 陈昊, Galina Demidova, 等. 开关磁阻电机无电流传感器控制方法[J]. 电工技术学报, 2023, 38(2): 365-374.
Fang Chenghui, Chen Hao, Demidova G, et al. Current sensorless control method of switched relu- ctance motors[J]. Transactions of China Electro- technical Society, 2023, 38(2): 365-374.
[3] Ge Lefei, Fan Zizhen, Du Nan, et al. Model predictive torque and force control for switched reluctance machines based on online optimal sharing function[J]. IEEE Transactions on Power Electronics, 2023, 38(10): 12359-12364.
[4] Li Xin, Shamsi P. Inductance surface learning for model predictive current control of switched relu- ctance motors[J]. IEEE Transactions on Transpo- rtation Electrification, 2015, 1(3): 287-297.
[5] 魏尧, 柯栋梁, 黄东晓, 等. 基于时间序列的永磁同步电机连续控制集无模型预测电流控制[J]. 电工技术学报, 2023, 38(22): 6027-6038.
Wei Yao, Ke Dongliang, Huang Dongxiao, et al. A continuous-control-set type model-free predictive current control based on time-series for permanent magnet synchronous motor drives[J]. Transactions of China Electrotechnical Society, 2023, 38(22): 6027- 6038.
[6] 赵悦, 陈卓易, 沈非凡, 等. 基于单电阻采样的永磁同步电机有限集模型预测控制[J]. 电工技术学报, 2026, 41(2): 487-498.
Zhao Yue, Chen Zhuoyi, Shen Feifan, et al. Finite- control-set model predictive control of permanent magnet synchronous motor based on single resistor sampling[J]. Transactions of China Electrotechnical Society, 2026,41(2): 487-498.
[7] Xu Shuai, Yao Chunxing, Ren Guanzhou, et al. Weighting factors autotuning of FCS-MPC for hybrid ANPC inverter in PMSM drives based on deep residual networks[J]. IEEE Transactions on Power Electronics, 2024, 39(12): 16540-16552.
[8] 顾明, 邢勐, 葛贤军. 感应电机无权重分配有限集模型预测控制设计[J]. 电气传动, 2022, 52(7): 3-8, 15.
Gu Ming, Xing Meng, Ge Xianjun. Design of the finite set model predictive control without weight distribution for induction motor[J]. Electric Drive, 2022, 52(7): 3-8, 15.
[9] 颜黎明, 郭鑫, 徐玺声, 等. 基于新型解析权重因子配置的感应电机模型预测转矩控制[J]. 电工技术学报, 2023, 38(20): 5421-5433.
Yan Liming, Guo Xin, Xu Xisheng, et al. Model predictive torque control of induction machine drives using novel analytic weighting factor assignment[J]. Transactions of China Electrotechnical Society, 2023, 38(20): 5421-5433.
[10] 宋文胜, 郭永琪, 余彬, 等. 五相永磁同步电机全速度范围占空比优化模型预测电流控制[J]. 中国电机工程学报, 2022, 42(12): 4561-4571.
Song Wensheng, Guo Yongqi, Yu Bin, et al. A model predictive current control of five-phase PMSM with duty ratio optimization in whole speed range[J]. Proceedings of the CSEE, 2022, 42(12): 4561-4571.
[11] 汪逸哲, 黄晟, 廖武, 等. 基于新型虚拟矢量调制方法的IPMSM模型预测电流控制方法[J]. 电工技术学报, 2024, 39(8): 2422-2433.
Wang Yizhe, Huang Sheng, Liao Wu, et al. IPMSM model predictive current control method based on a novel virtual vector modulation method[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(8): 2422-2433.
[12] Zhang Yongchang, Peng Yubin, Yang Haitao. Perfor- mance improvement of two-vectors-based model predictive control of PWM rectifier[J]. IEEE Transa- ctions on Power Electronics, 2016, 31(8): 6016-6030.
[13] 葛乐飞, 宋佳赫, 黄佳乐, 等. 基于电流误差补偿的开关磁阻电机振动抑制策略[J]. 电工技术学报, 2025, 40(17): 5434-5447.
Ge Lefei, Song Jiahe, Huang Jiale, et al. Vibration suppression strategy for switched reluctance machine based on current error compensation[J]. Transactions of China Electrotechnical Society, 2025, 40(17): 5434-5447.
[14] Valencia D F, Tarvirdilu-Asl R, Garcia C, et al. A review of predictive control techniques for switched reluctance machine drives. part II: torque control, assessment and challenges[J]. IEEE Transactions on Energy Conversion, 2021, 36(2): 1323-1335.
[15] 任萍, 朱景伟, 赵燕, 等. 一种基于快速傅里叶建模方法的开关磁阻电机模型预测控制[J]. 中国电机工程学报, 2024, 44(14): 5764-5776.
Ren Ping, Zhu Jingwei, Zhao Yan, et al. Model predictive control of switched reluctance motor based on fast Fourier modeling method[J]. Proceedings of the CSEE, 2024, 44(14): 5764-5776.
[16] 张其林, 全力, 张超, 等. 基于矢量控制的五相永磁同步电机相电流重构方法研究[J]. 电机与控制应用, 2017, 44(11): 18-25.
Zhang Qilin, Quan Li, Zhang Chao, et al. Research on phase current reconstruction algorithm for five-phase permanent magnet synchronous motor based on vector control[J]. Electric Machines & Control Application, 2017, 44(11): 18-25.
[17] Tian Lisi, Wang Zaixiang, Yu Qiang, et al. Current reconstruction by one-step compensation for permanent magnet synchronous motor with fixed sampling interval in position sensorless control[J]. IEEE Transactions on Industrial Electronics, 2023, 70(1): 200-210.
[18] Gan Chun, Wu Jianhua, Yang Shiyou, et al. Phase current reconstruction of switched reluctance motors from DC-link current under double high-frequency pulses injection[J]. IEEE Transactions on Industrial Electronics, 2015, 62(5): 3265-3276.
[19] 蒯松岩, 李奎, 衡凤平, 等. 考虑互感影响的开关磁阻电机无位置传感器控制技术[J]. 电工技术学报, 2017, 32(8): 178-186.
Kuai Songyan, Li Kui, Heng Fengping, et al. Position sensorless technology of switched reluctance motor considering mutual inductances[J]. Transactions of China Electrotechnical Society, 2017, 32(8): 178-186.
[20] 蒯松岩, 朱启铭, 王玺凯, 等. 基于DSP的开关磁阻电动机参数辨识技术[J]. 实验室研究与探索, 2023, 42(3): 98-103, 129.
Kuai Songyan, Zhu Qiming, Wang Xikai, et al. Parameter identification technology of switched reluctance motor based on DSP[J]. Research and Exploration in Laboratory, 2023, 42(3): 98-103, 129.
Abstract Switched Reluctance Motors (SRMs) have been extensively utilized in traditional mining machinery, conveyor systems, ventilation equipment, and hoisting devices, owing to their advantages of frequent start-stop capability, high efficiency, robust adaptability, and reliability. Furthermore, under the constraints of rare-earth resource scarcity and the ongoing national new-energy strategy, the rare-earth-free characteristic of SRMs ensures their economic viability, positioning them as an irreplaceable technology in the intelligent development of modern mining industries. Consequently, research on high-performance and cost-effective SRM drive systems holds significant practical value for advancing intelligent mining.
The hysteresis control of conventional SRMs results in a high switching frequency, while the nonlinear inductance variation causes significant current ripple during commutation. Model Predictive Control (MPC) is particularly suitable for handling such nonlinear issues. However, traditional finite-set model predictive control (FCS-MPC) for SRMs suffers from the following limitations. (1) Requirement for multiple current sensors, which increases system complexity and cost. Conventional phase-current reconstruction methods based on a single-bus current sensor fail in the two-phase conduction region due to overlapping intervals. The single-current-sensor phase current reconstruction scheme based on high-frequency injection is inefficient at low speeds. (2) Variable switching frequency and suboptimal current tracking. Only one voltage vector combination is selected per control cycle, leading to inconsistent switching frequencies and degraded current-following performance at low control frequencies.
This paper proposes a novel dual-vector model predictive current control (DV-MPCC) strategy with a single current sensor. The method integrates vector synthesis techniques. (1) In single-phase conduction regions, a valid vector and a zero vector are combined to calculate the dwell time of the voltage vector combination. (2) In two-phase conduction regions, two valid vectors and a zero vector are synthesized to determine the voltage vector combination dwell time. A bus-current-sensor-based phase current reconstruction scheme is further developed, enabling direct sampling of the conducting phase current in single-phase regions and multi-sampling reconstruction in two-phase regions. A phase-shifting method is employed to minimize reconstruction errors and avoid dead zones. During this process, the causes of errors in this reconstruction method are analyzed, providing a theoretical foundation for error analysis in experiments.
Experimental validation was conducted on a three-phase 12/8 SRM using a control platform featuring the TMS320F28379D DSP and AD7606 synchronous sampling chip. The comparisons include the traditional FCS-MPCC method under steady-state current response at 100 r/min and 500 r/min, current response during speed variation from 400 r/min to 600 r/min, current characteristics under load torque variation from 6 N·m to 12 N·m, and torque ripple during commutation. The proposed method demonstrates good fixed switching frequency and superior current tracking performance even at low control frequencies by dynamically selecting multiple switching states per cycle. Accurate phase current reconstruction is achieved in both steady-state and dynamic conditions (e.g., speed variations, load torque transients), with minimal performance degradation compared to multi-sensor systems. Phase-shifting compensation is robust in overlapped regions, ensuring reliable current reconstruction even in dead zones. The proposed method simplifies hardware implementation, enhances control accuracy, and is readily integrated with speed-loop control strategies. It offers a promising solution for industrial SRM drives.
keywords:Switched reluctance motor (SRM), model predictive current control (MPCC), dual-vector model predictive control (DV-MPC), single-current sensor
DOI: 10.19595/j.cnki.1000-6753.tces.250794
中图分类号:TM352
教育部产学研合作协同育人项目(202102449040)、江苏省高等教育教改研究课题(2017JSJG127)和煤炭行业高等教育研究课题(2021MXJG032)资助。
收稿日期 2025-05-13
改稿日期 2025-06-04
蒯松岩 男,1978年生,博士,副教授,研究方向为电力电子与电力传动、电机及其控制等。E-mail: kuaisongyan@163.com
胡 堃 男,1978年生,博士,教授,研究方向为电机与电器、新型电机的设计与应用。E-mail: hucaipan@126.com(通信作者)
(编辑 崔文静)