图1 高温超导钉扎磁浮永磁轮驱动样机
Fig.1 PMEDW driven prototype of HTS maglev
摘要 现有磁浮交通使用直线电机存在成本高、控制系统复杂等问题,而Halbach永磁轮(PMEDW)结构简单、工程造价低,能将磁阻力转化为推进力,有望代替直线电机成为一种新型驱动方式。为实现PMEDW推进力调节稳定性及系统快速响应,该文提出一种永磁轮电机的改进自抗扰控制(RAM)策略。首先,对永磁轮电机一体化结构进行优化,加入6 mm硅钢材料,电机磁链幅值提升94.97%;然后,通过实验获取PMEDW在不同转速下的电磁力特性;构建改进永磁轮电机控制系统,相比传统比例-积分(PI)控制,RAM控制响应时间减小约0.5 s,超调量减小约22.4%;最后,建立Simulink与Maxwell的联合仿真模型。结果表明,RAM控制策略能够有效提高永磁轮电机的运行稳定性,为新型永磁轮驱动技术在磁悬浮交通中的应用提供有力支撑。
关键词:永磁轮电机 一体化永磁轮 模型预测控制 自抗扰控制 径向基函数神经网络
高温超导钉扎磁悬浮列车驱动系统主要采用长定子直线电机[1],但是长定子直线电机存在工程造价较高、控制复杂等问题。因此,有必要探索一种新的适用于高温超导钉扎磁悬浮列车的驱动方式,用于克服传统直线电机驱动系统的诸多缺点。永磁电动轮(Permanent Magnet Electrodynamic Wheel, PMEDW)常称为永磁轮,由环形Halbach永磁体阵列构成,其作为磁悬浮列车的驱动系统,具有结构简单、工程造价低、安全可靠等优点,为高温超导钉扎磁悬浮列车提供了新型的驱动方式[2]。永磁轮驱动的工作原理是通过控制永磁轮电机旋转[3],导体板切割磁感线产生感应磁场与PMEDW磁场相互作用,进而产生电磁力。
关于永磁轮驱动技术,陈怡浩等[4]提出了一种环形Halbach永磁轮的新型充磁方式以提升永磁轮电磁力。刘新等[5]提出了一种基于斜置环形Halbach永磁轮的“悬浮-导向-推进”一体化方案,为系统集成设计提供了新思路。Deng Zigang等[6]搭建了高温超导永磁轮驱动样机,用永磁轮驱动替代了传统的直线电机驱动,然而永磁轮的旋转并非由自身直接驱动,而是通过外部电机带动换向齿轮传递至永磁轮实现旋转,齿轮传动增加了机械损耗,降低了系统效率。Yuan Yuan等[2]通过机械结构将永磁轮固定在外转子电机上,虽然解决了永磁轮的驱动,但也带来了结构复杂性和质量增加的问题。A. Kushwaha等[7]研究了永磁轮与电机耦合结构导体板涡流会导致电机气隙磁场不对称,进而引发三相电压不平衡与转矩脉动,可以通过电流控制策略抑制。大部分学者对于永磁轮的研究都主要集中在建模和优化方面[8-11],在实验与工程实践中,永磁轮的旋转通过外部电机来驱动[2-3, 12]。而永磁轮与电机一体化(Integration of PMEDW and Motor, IPMEDWM)集成设计的结构,减少机械连接点,不需要使用传动结构减少机械损耗,优化系统结构,可以提高运行的安全性和可靠性。
永磁轮电机是一个强耦合、多变量的非线性系统,传统比例-积分(Proportional-Integral, PI)控制容易受到外界扰动的影响。针对电机控制问题,国内外学者研究了滑模控制[13]、模型预测控制[14](Model Predictive Control, MPC)、自适应控制[15]、自抗扰控制(Active Disturbance Rejection Control, ADRC)等算法应用于电机控制系统中。自抗扰控制因其强鲁棒性、抗干扰性、适应复杂非线性系统,常被应用于电机转速控制中,但需要整定的参数较多,并且通过试凑法整定参数效率较低,如何解决这种不足成为新的研究热点。Gao Zhiqiang等[16]将整定参数与带宽结合,采用极点配置法进行参数整定,优化了参数整定,但是调参范围存在局限性。李思毅等[17]研究了一种基于自抗扰控制的电压反馈弱磁控制方法,并给出了该控制器参数的整定经验,但需要整定的参数较多,且整定过程需依赖反复试错,难以实现参数配置的最优化。由于PI控制器的电流控制存在超调大和参数鲁棒性差等缺点,模型预测控制具有原理简单、多目标优化和鲁棒性强等优势[18],能降低电流谐振,因而众多学者将其替代电流控制中的PI控制器。H. T. Moon等[19]将电流作为控制变量,通过计算选择价值函数最小的电压矢量作为输出,得出最优电压矢量。
随着智能算法的发展,其在参数整定中广泛应用。在智能算法中,径向基函数网络(Radial Basis Function, RBF)具有计算量少、学习速度快和无局部极小问题存在等优点[20],为ADRC参数整定提供了高效且智能的优化方法。为提高永磁轮电机的控制性能,减少自抗扰的参数整定个数,本文提出将永磁轮电机转速控制与推进力调节耦合的控制策略,设计了一种RBF、ADRC与MPC相结合的改进自抗扰控制(RBF-ADRC-MPC, RAM)策略,以实现对永磁轮电机推进力的快速控制,并提高系统的抗干扰能力和稳定性。
综上所述,本文将围绕Halbach永磁轮驱动系统展开研究,首先,通过有限元建模,对永磁轮电机的结构进行优化改进;然后,通过永磁轮力检测实验装置获取力与转速的关系,并提出一种新的永磁轮推进力控制策略,即基于电流预测控制的改进自抗扰控制策略;最后,通过联合仿真验证本文所提方法的有效性。
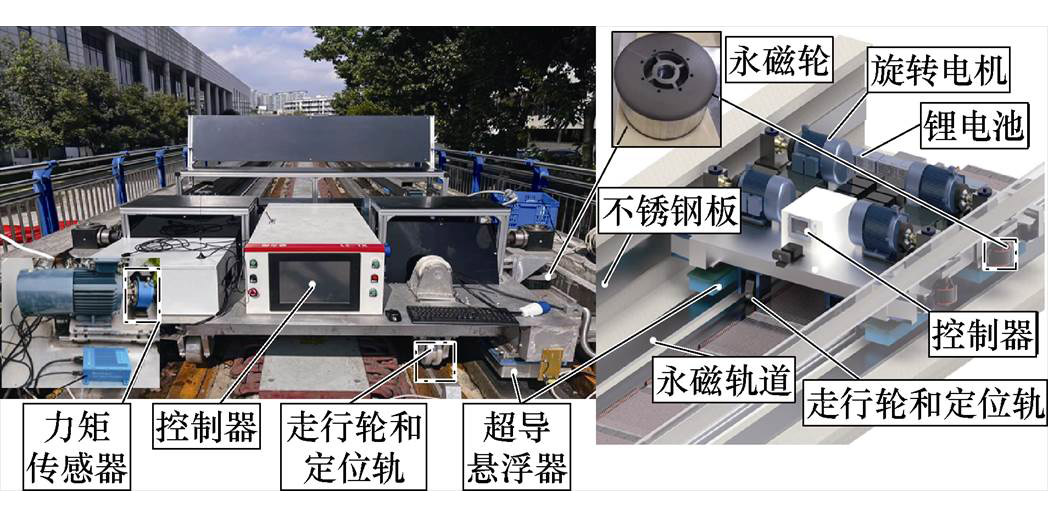
永磁轮旋转产生运动磁场,导体板产生的感应磁场与之相互作用,最终产生电磁力。基于永磁轮驱动原理,文献[21]搭建了初代高温超导钉扎磁浮永磁轮驱动样机,如图1所示。永磁轮横向摆放至样机两侧,该结构可以抵消两侧永磁轮产生的导向力并产生向前的推进力,超导悬浮器为样机提供悬浮力。
外部电机通过换向齿轮传递至永磁轮实现旋转,该结构存在传动环节多、机械损耗大、系统效率低等问题。针对这一不足,本文提出永磁轮与电机一体化结构,如图2a所示。为解决IPMEDWM存在的漏磁现象,在Halbach阵列与NS极永磁体之间加入硅钢材料,如图2b所示。
图1 高温超导钉扎磁浮永磁轮驱动样机
Fig.1 PMEDW driven prototype of HTS maglev
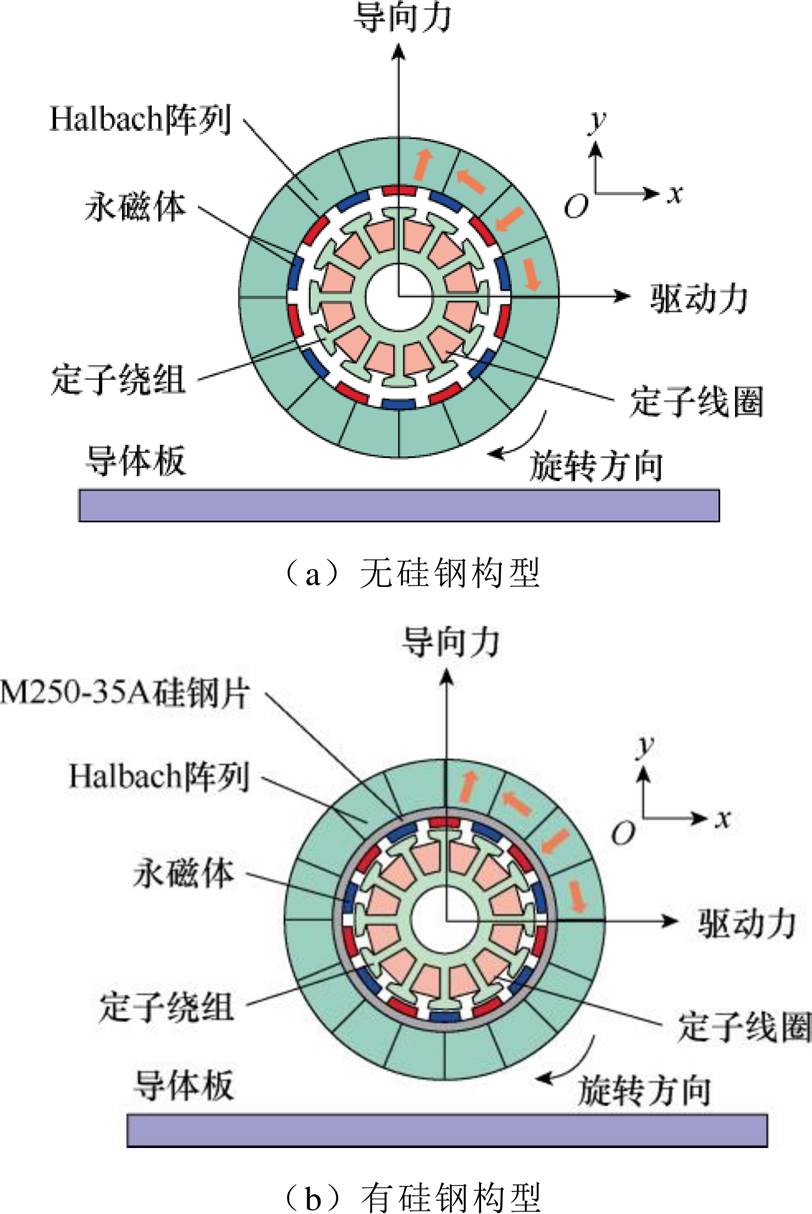
图2 一体化永磁轮电机二维结构
Fig.2 The 2D model schematic of IPWMM
永磁轮电机(永磁同步电机衍生结构)与典型的永磁同步电机仅有结构上的差异,所以,永磁轮电机数学模型与典型的表贴式永磁同步电机数学模型相同。为方便分析,忽略磁饱和效应及各种损耗、忽略齿槽效应、忽略电机运行中温度和频率的影响,并假设绕组均匀对称分布[22],且负载转矩主要由磁阻力矩构成,空气阻力及其他因素对转矩影响较小。
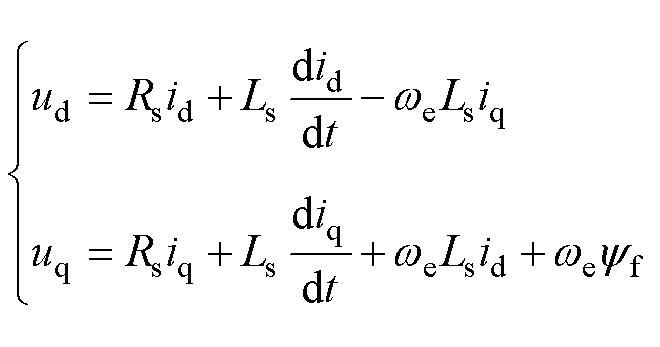
基于上面的假设,则永磁轮电机的状态方程可表示为
 (1)
(1)
式中,ud和uq分别为在d、q轴上的电压分量;Rs为等效电阻;id和iq分别为d、q轴上电流分量;Ls为等效电感;we为电角速度;yf为转子永磁励磁磁链。
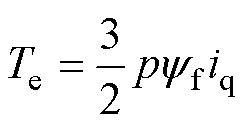
电磁转矩可表示为
 (2)
(2)
式中,p为电机的磁极对数;Te为电磁转矩。
基于假设,永磁轮电机负载转矩可表示为
 (3)
(3)
式中,TL为负载转矩;m为永磁轮电机的半径;l为永磁轮电机与导体板之间的间隙;Fx为推进力。
引入电机运动方程,可表示为
 (4)
(4)
式中,J为转子转动惯量;w为机械角速度;Bv为黏滞摩擦系数。
基于第2节假设,根据式(1)状态方程将电流写成微分形式并采用一阶欧拉前向法对其离散化,整理可得dq轴的k+1时刻的电流预测模型为
 (5)
(5)
 (6)
(6)
式中,Ts为离散周期;id(k+1)和iq(k+1)分别为k+1时刻在d、q轴上的预测电流分量;id(k)和iq(k)分别为k时刻在d、q轴上的电流分量;ud(k)和uq(k)分别为k时刻在d、q轴上的电压分量。
由于多步预测的预测误差会随着步数的增加而累积,逐渐降低预测结果的准确性[23]。因此,本文将选择预测区间和预测步数都为1。采用平方误差项的形式,构造价值函数,有
 (7)
(7)
式中, 、
、 分别为d、q轴电流参考值;imax为允许的最大电流。
分别为d、q轴电流参考值;imax为允许的最大电流。
ADRC控制器的原理如图3所示,一阶ADRC由微分跟踪器(Tracking Differentiator, TD)、扩张状态观测器(Extended State Observer, ESO)和非线性误差反馈控制律(Nonlinear State Error Feedback, NLSEF)三部分构成[24]。
图3 ADRC控制器工作原理
Fig.3 The working principle of ADRC
由式(1)和式(3)可得推进力与角速度的关系,为了简化控制器设计并提高系统响应的实时性与鲁棒性,本文对推进力和角速度的关系进行拟合处理,推进力表示为角速度的函数,有
 (8)
(8)
将式(8)与式(2)、式(3)代入运动方程式(4)得
 (9)
(9)
将iq设为输出量u0,输出增益g= ,系统内外总扰动用
,系统内外总扰动用 表示,推进力状态方程可改写为
表示,推进力状态方程可改写为
 (10)
(10)
因此,永磁轮电机推进力的ADRC方程式如下所示。
一阶微分跟踪器(TD)
 (11)
(11)
二阶扩张观测器(ESO)
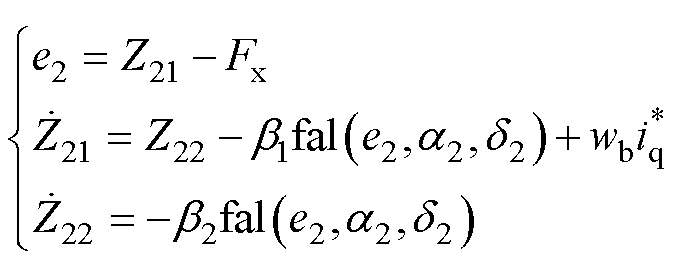 (12)
(12)
非线性状态误差反馈控制率(NLSEF)
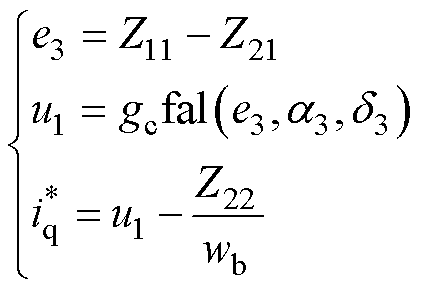 (13)
(13)
式中,e1~e3为误差值;a、d分别为跟踪因子和滤波因子;r0为速度因子;Z11为跟踪信号;Z21和Z22分别为Fx和z的估计值;b1、b2分别为校正增益;wb为补偿因子;gc为调节增益; 为非线性函数。
为非线性函数。
对的e>0段求导得
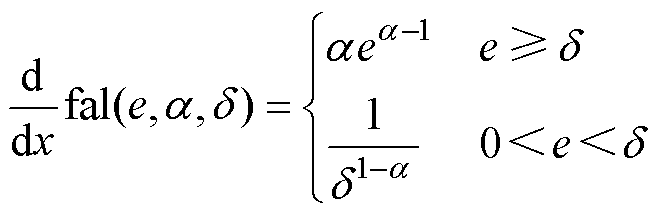 (14)
(14)
可以看出,函数在e=d处不可导,导致d的取值直接影响函数,甚至可能引发高频振荡,降低系统的鲁棒性。为解决这一问题,设计一个连续且光滑的改进(Improved  ,
,  函数,既消除了原函数在e=d处的不可导,又更好地满足“小误差大增益,大误差小增益”的概念,表达式为
函数,既消除了原函数在e=d处的不可导,又更好地满足“小误差大增益,大误差小增益”的概念,表达式为
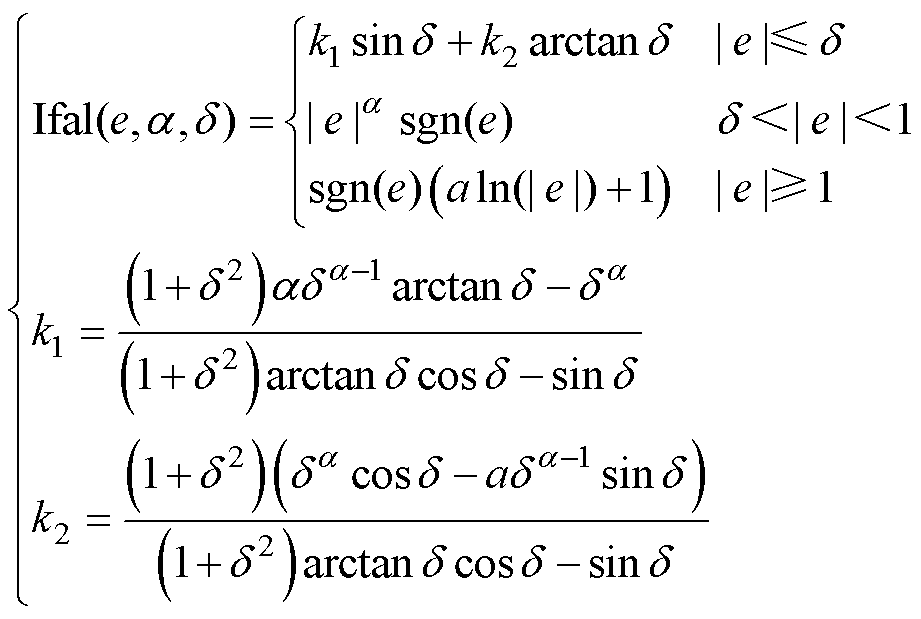 (15)
(15)
函数曲线如图4所示。
将fal函数替换为Ifal函数,观测器的误差方程可写为
 (16)
(16)
其中
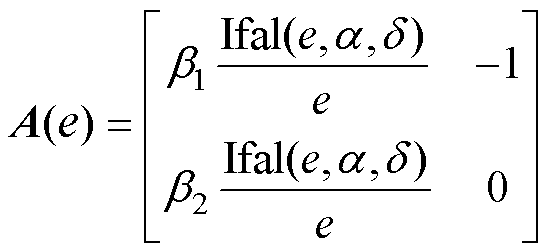 (17)
(17)
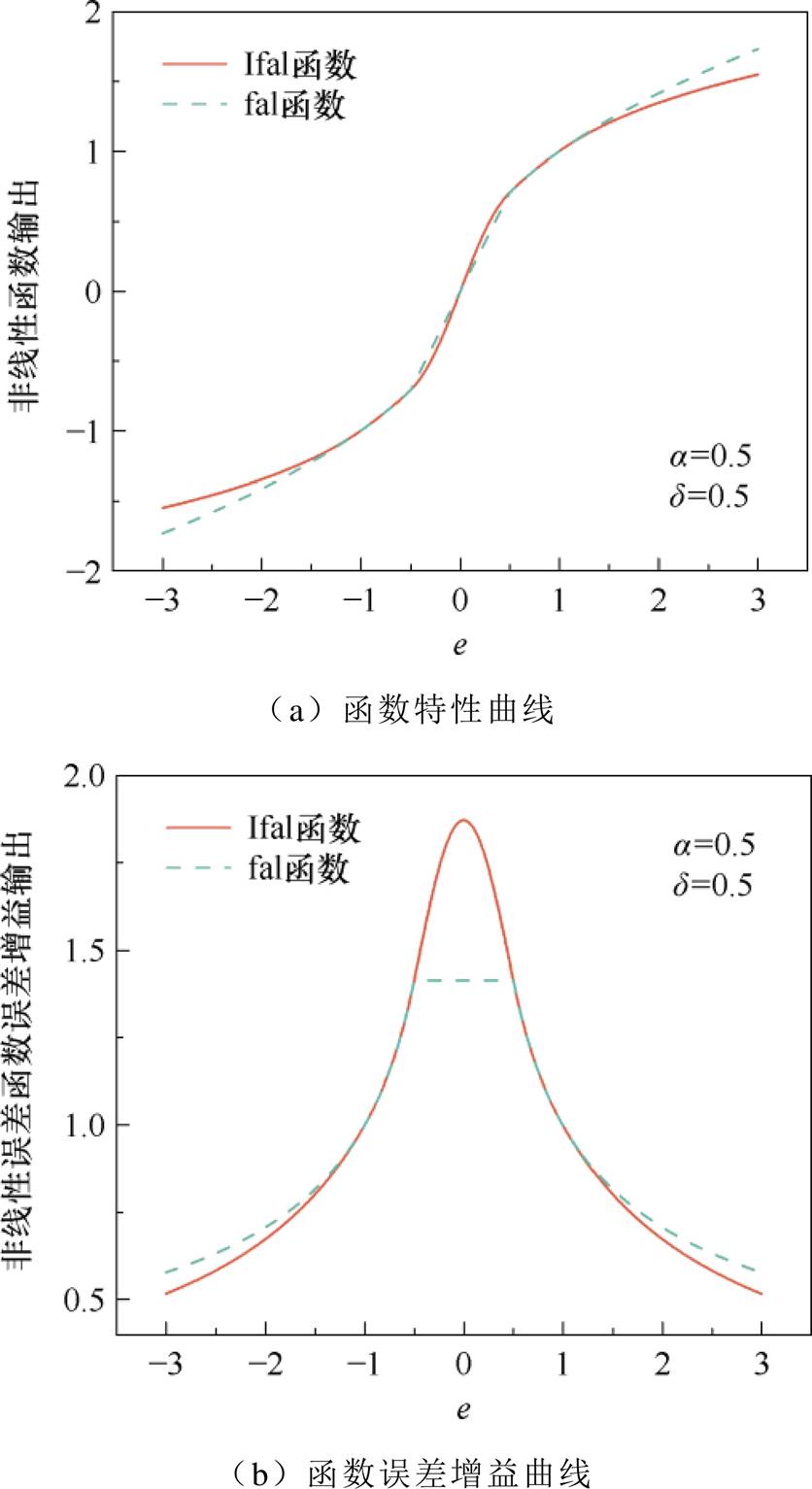
图4 fal函数与Ifal函数的对比
Fig.4 Comparison of fal function and Ifal function
本文借助文献[25]所使用的系统稳定性证明理论来证明Ifal函数的稳定性。证明如下:
引理1[26] 若存在主对角元素为正数的斜对称矩阵D
 (18)
(18)
使得矩阵DA(e)正定对称,则系统是Lyapunov渐近稳定的。其中,d11和d22为正实数;d12为常数。
通过计算可得矩阵DA(e)为
 (19)
(19)
其中
 (20)
(20)
若矩阵DA(e)为对称正定矩阵,则须满足如下条件
 (21)
(21)
 (22)
(22)
 (23)
(23)
令d11=d12=1,d22=e,e为无限趋于零的正数,代入式(21)~式(23)中得
 (24)
(24)
 (25)
(25)
 (26)
(26)
因为e为无限趋近于0,b1和b2大于0,G有界,且
 (27)
(27)
所以可得
 (28)
(28)
综上所述,存在满足条件的矩阵D,使得矩阵DA(e)正定对称,证明Ifal函数构造的系统是稳定的。
传统ADRC依靠扩张状态观测器实时估计与补偿扰动,但是其性能高度依赖参数的合理整定。由于ADRC具有多个待调参数,其选取需要依靠大量的实验与仿真经验,通过试凑法得出。此外,永磁轮电机在运行过程中,其推进力随着转速的增大呈现先增大后减小的非线性特性[21],这将导致永磁轮电机的负载力矩随之变化,从而影响永磁轮电机的动态性能,固定的参数使其难以保持最优的控制性能。因此,本文引入RBF神经网络,实现永磁轮电机运行过程中ADRC中观测器参数b1和b2的自整定,同时减少对人工调参的依赖,降低参数整定的难度。RBF神经网络的三层分别为输入层、隐含层和输出层[27],图5给出RBF网络结构。其中,x1~x3为输入值,y为输出结果,hj为激活函数,l1~lj为输出权重,j为隐含层节点数,本文选择性能优良的Gaussian函数,表达式为
 (29)
(29)
式中, 为第j个隐含层神经元的高斯中心点;bj为第j个隐含层节点的基宽长度,用于调整神经元的灵敏度;
为第j个隐含层神经元的高斯中心点;bj为第j个隐含层节点的基宽长度,用于调整神经元的灵敏度; 为欧氏向量范数,表示输入神经元与中心点矢量间的距离[19]。
为欧氏向量范数,表示输入神经元与中心点矢量间的距离[19]。
RBF网络模型的设计核心为确定隐含层基函数参数cj、bj、lj,选用梯度下降法进行网络模型参数的学习与训练,具体迭代过程为
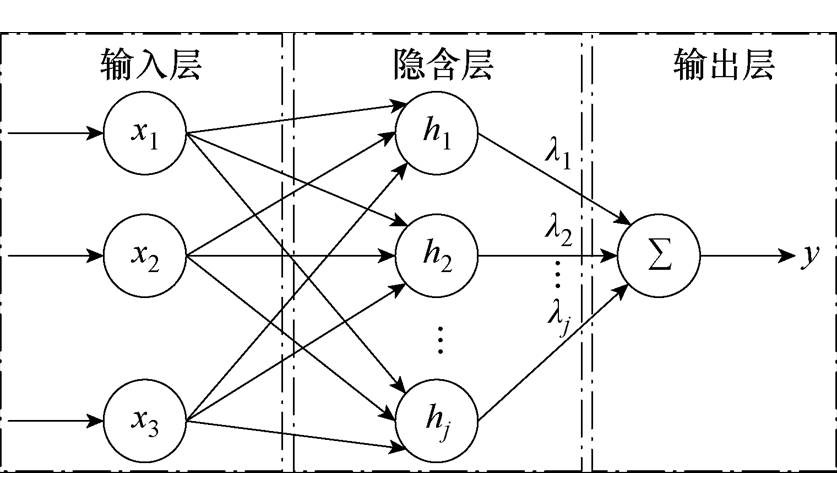
图5 RBF神经网络结构
Fig.5 The structure of RBF neural network
 (30)
(30)
 (31)
(31)
 (32)
(32)
式中,h为学习速率,取值范围为[0, 1];a1为动量因子,取值范围为[0, 1];ej(k)为网络在第k时刻的输出误差;E(k)为k时刻目标值与输出值之间的误差函数。
结合系统输入与输出间的误差,定义ESO控制器中b1和b2参数增量系数为
 (33)
(33)
式中,ec1和ec2分别为ESO观测器中误差变化量与瞬时误差。
定义ESO中参数b1和b2整定公式为
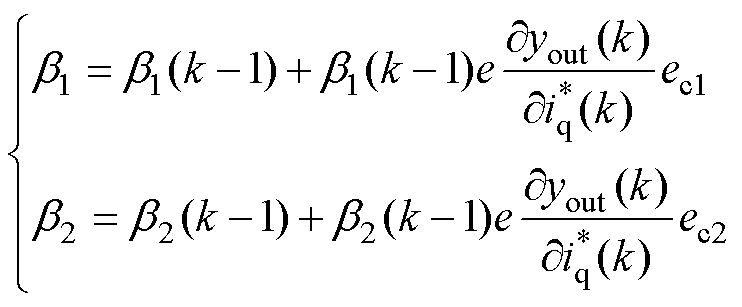 (34)
(34)
式中,yout(k)为RBF神经网络在第k时刻的输出值。
RBF-ADRC控制器在原ADRC控制器的基础上,通过RBF神经网络的自整定功能,实时调节ESO中参数b1和b2。RBF-ADRC控制器内部结构框图如图6所示。
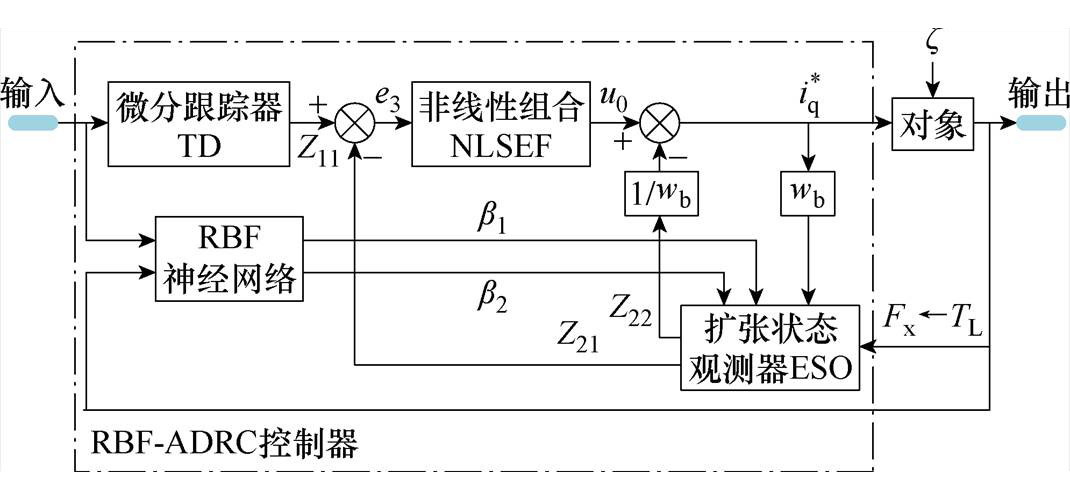
图6 基于RBF的ADRC控制框图
Fig.6 The diagram of ADRC based on RBF
根据上述MPC与RBF-ADRC的构造,基于改进的ADRC的永磁轮电机模型预测控制系统整体框图如图7所示。图中, 为给定驱动力值,
为给定驱动力值, 、
、 分别为输入至坐标转换模块的d轴与q轴的电压参考值,
分别为输入至坐标转换模块的d轴与q轴的电压参考值, 、
、 分别为输入至SVPWM的a轴与b轴的电压参考值,
分别为输入至SVPWM的a轴与b轴的电压参考值, 、
、 分别为输入至MPC的d轴与q轴的电流参考值。永磁轮电机的推进力调节采用RBF-ADRC,电流采用MPC调节。
分别为输入至MPC的d轴与q轴的电流参考值。永磁轮电机的推进力调节采用RBF-ADRC,电流采用MPC调节。
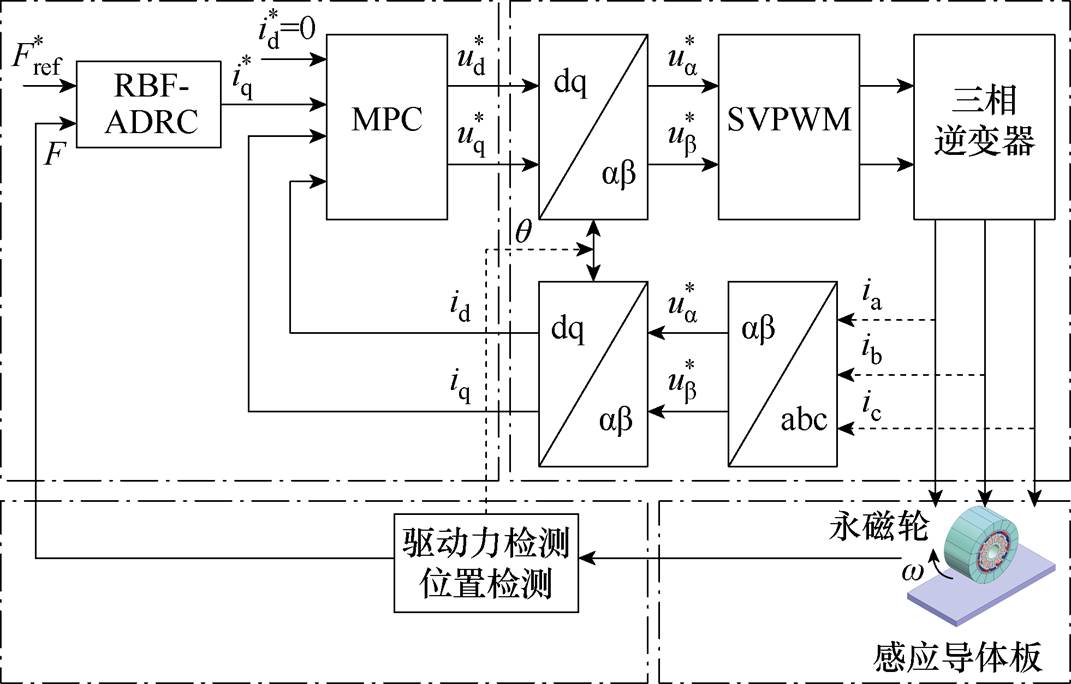
图7 永磁轮电机控制系统结构框图
Fig.7 The structure block diagram of PMEDWM control system
首先利用有限元仿真对永磁轮电机的转子结构进行简要分析,结合永磁轮实验研究,得出转速与力之间的关系,其中转速与角速度之间的关系如式(35)所示;然后使用Matlab/Simulink仿真搭建永磁轮电机控制系统;最后搭建Simulink与Maxwell联合仿真,对所设计的RAM控制器进行验证。
 (35)
(35)
根据表1的参数,构建永磁轮电机的Maxwell有限元模型。
表1 永磁轮电机参数
Tab.1 Parameters of PMEDW motor
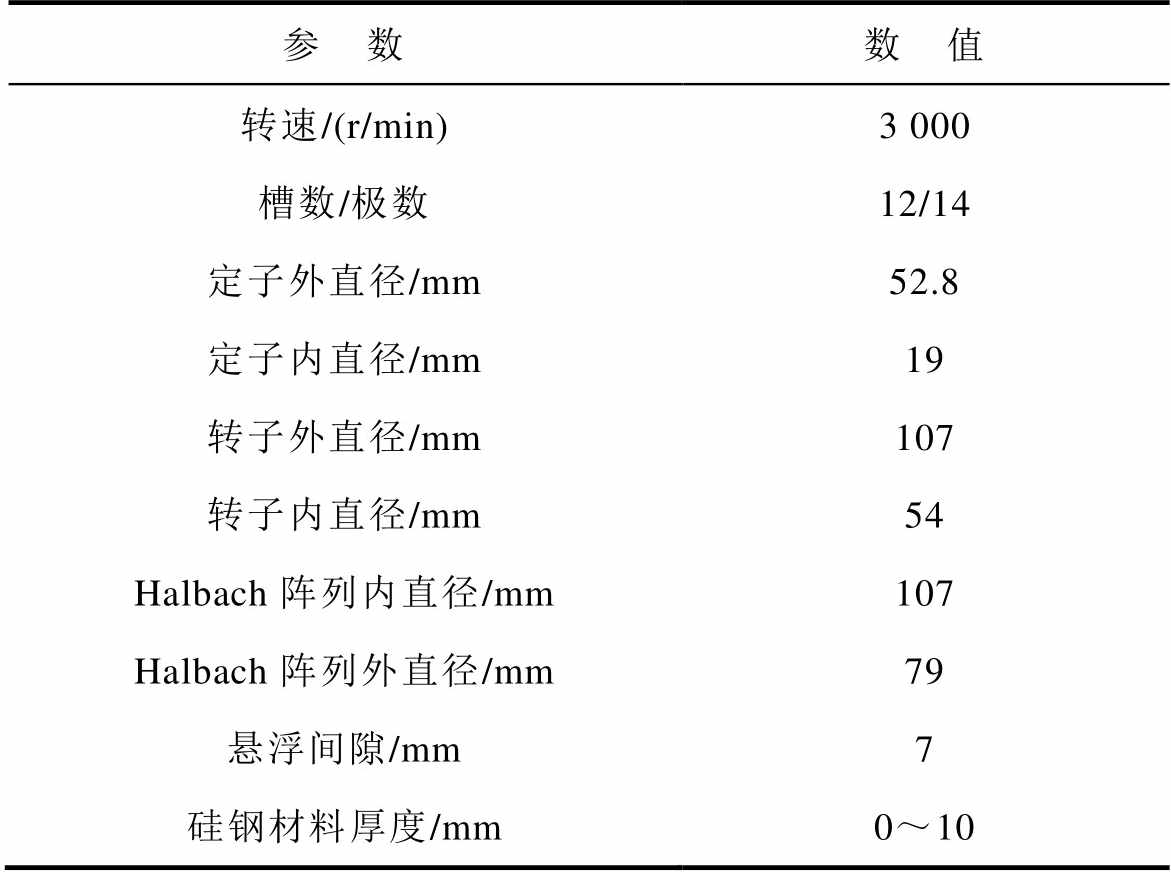
参 数数 值 转速/(r/min)3 000 槽数/极数12/14 定子外直径/mm52.8 定子内直径/mm19 转子外直径/mm107 转子内直径/mm54 Halbach阵列内直径/mm107 Halbach阵列外直径/mm79 悬浮间隙/mm7 硅钢材料厚度/mm0~10
图8展示了永磁轮电机在有无硅钢材料下的磁矢分布情况。可以观察到,在无硅钢构型中,Halbach阵列与NS磁体之间的空气区域中,磁通密度较低且磁力线路径分散。加入M250-35A硅钢材料后,其高磁导率有效引导了磁通的闭合路径,使磁感线更多地集中于铁磁材料中,避免了在空气中发散,磁路更加集中、磁通密度更高。
电机下半区离Halbach阵列5 mm处的磁感应强度大小的对比如图9所示,电磁力结果的对比如图10所示,永磁轮电机的电磁转矩结果如图11所示。从图9~图11中可得,加入硅钢材料后,对Halbach阵列外侧的磁场影响较小。磁感应强度在80 mm附近变大主要是由于下方导体板产生的感应磁场与原有磁场叠加所致。与此同时,在带载运行条件下,永磁轮电机的电磁转矩由1.76 N·m提升至3.35 N·m,表明引入硅钢材料有效改善了磁路结构,显著提升了电机的输出性能。图12表明加入硅钢材料后,损耗从0.70 W/kg增加至2.40 W/kg。为抑制损耗的增加,可以采用薄片层叠结构或绝缘处理以降低损耗。
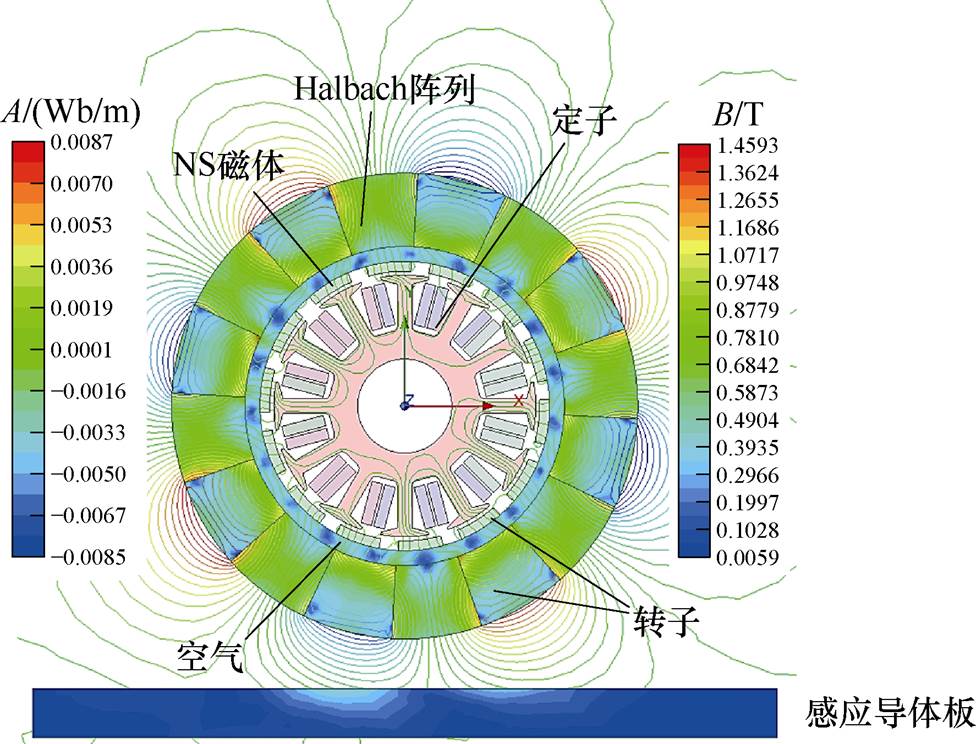
(a)无硅钢构型
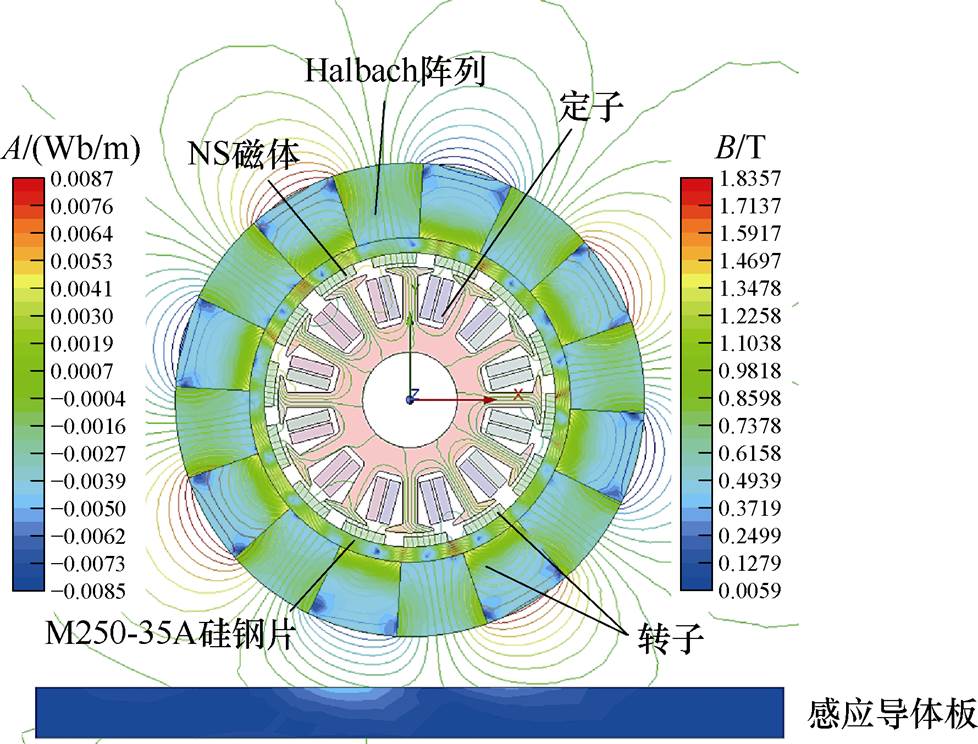
(b)有硅钢构型
图8 永磁轮电机及导体板区域磁场分布示意图
Fig.8 Magnetic field distribution of the IPMEDWM and conductor plate region
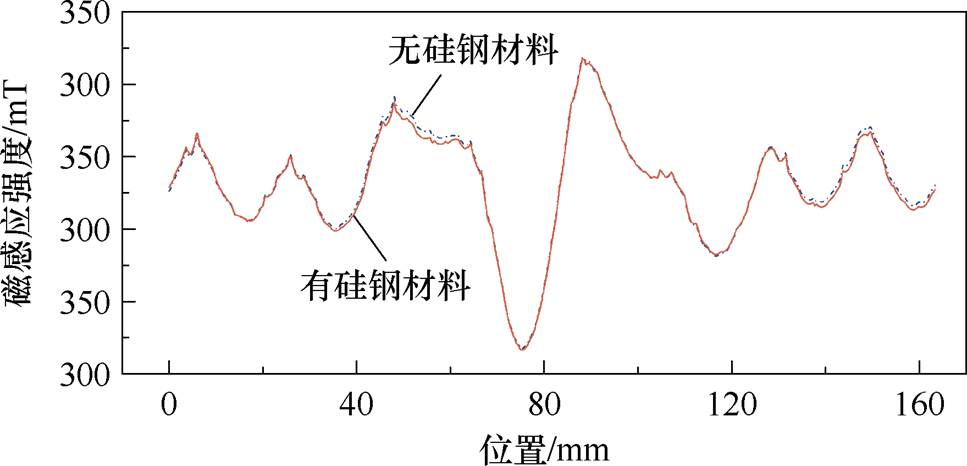
图9 电机下半区离Halbach阵列5 mm处的磁感应强度大小的对比
Fig.9 Comparison of the magnetic flux density in the lower half of the motor at 5 mm away from the Halbach array
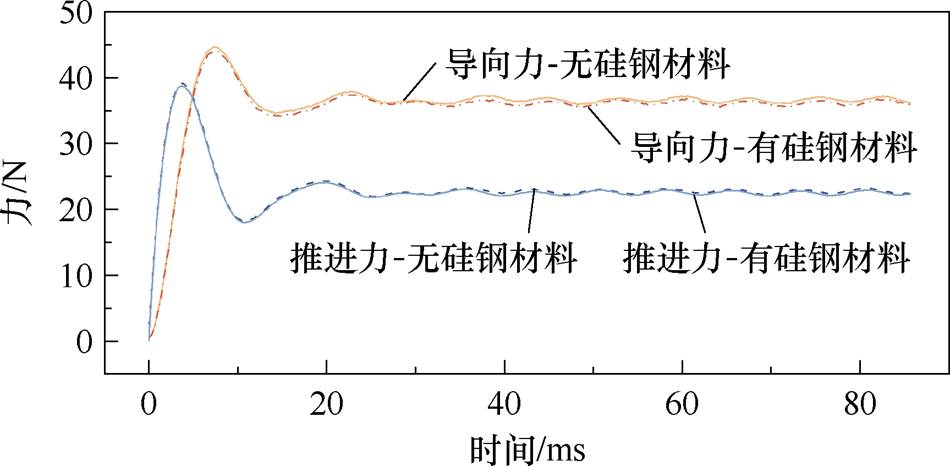
图10 电磁力结果的对比
Fig.10 Comparison of the electromagnetic force
图13所示为永磁轮电机空载运行时机械角度与气隙径向磁通密度的波形,以302°处为例,没有加入硅钢材料的结构,其气隙径向磁通密度的幅值为0.357 T。加入2 mm的硅钢材料后幅值增加至0.592 T,相比没有硅钢材料其径向磁通密度增加了65.83%。这是因为硅钢片有较高的磁导率,集中了磁力线于其内部,重新规划了磁路,增大了气隙内部的磁场利用率,减少了漏磁,同时硅钢材料也减少了外环Halbach阵列内侧对气隙处的磁场影响。依次增加2~10 mm硅钢片,径向磁通密度依次为0.622、0.730 1、0.730 3、0.730 4 T。厚度达到6 mm后,随着硅钢材料的厚度增加径向磁通密度的值变化不明显,这是由于厚度增加到6 mm后,漏磁已经得到显著的改善,剩余的漏磁影响较小。
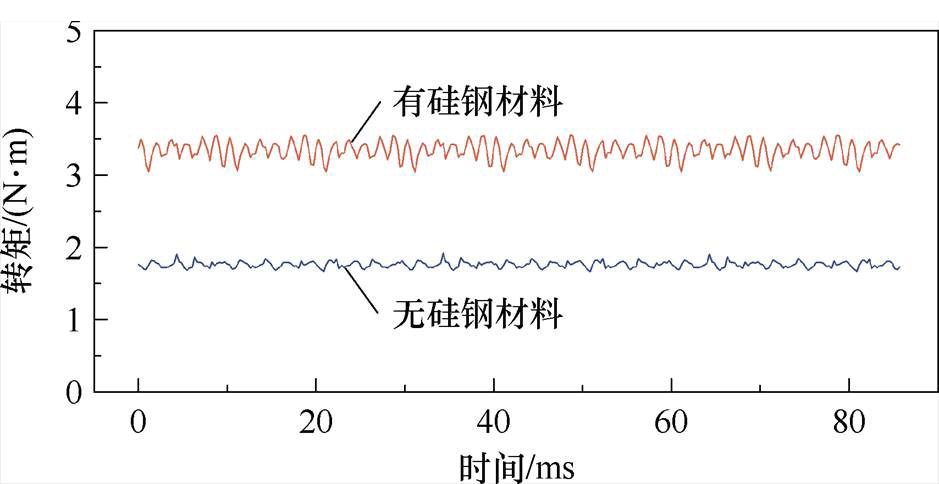
图11 磁轮电机的电磁转矩结果
Fig.11 The electromagnetic torque result graph of PMEDWM
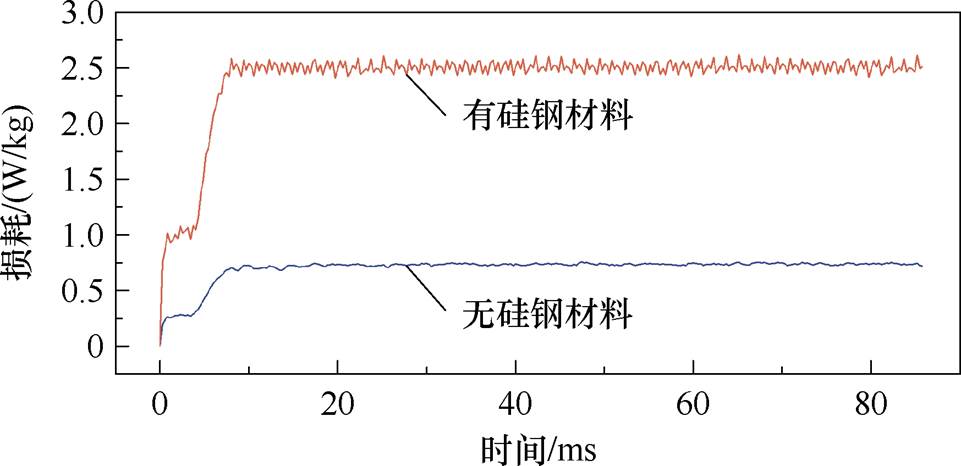
图12 加入硅钢材料后,电机的铁心损耗
Fig.12 Core loss diagram of the motor after adding silicon steel material
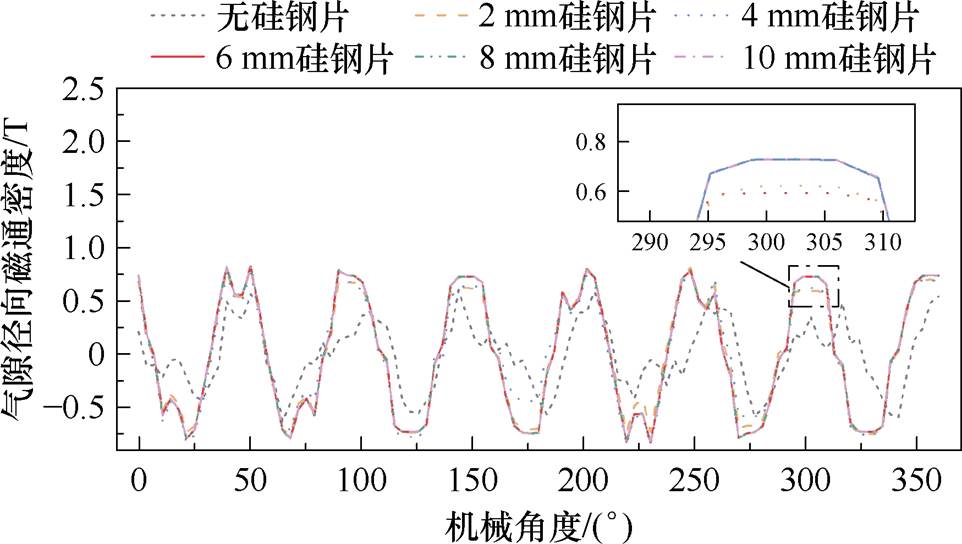
图13 不同厚度硅钢材料的气隙径向磁通密度
Fig.13 Radial air-gap flux density of silicon steel material with different thickness
图14为三种情况下的三相磁链波形。加入导体板后,三相磁链的变化忽略不计,这是由于永磁轮电机气隙离导体板产生的感应磁场较远,永磁轮电机气隙处几乎不受感应磁场的影响。加入导体板之后,再加入6 mm的硅钢材料,其内部的三相磁链幅从原来的3.708 4 mWb增加到7.230 4 mWb,提升了94.97%,提高了磁场利用率,电磁转矩增大。因此,考虑实际的加工难度、结构质量等因素,可以选择6 mm的硅钢材料加入结构中,提高永磁轮的性能。
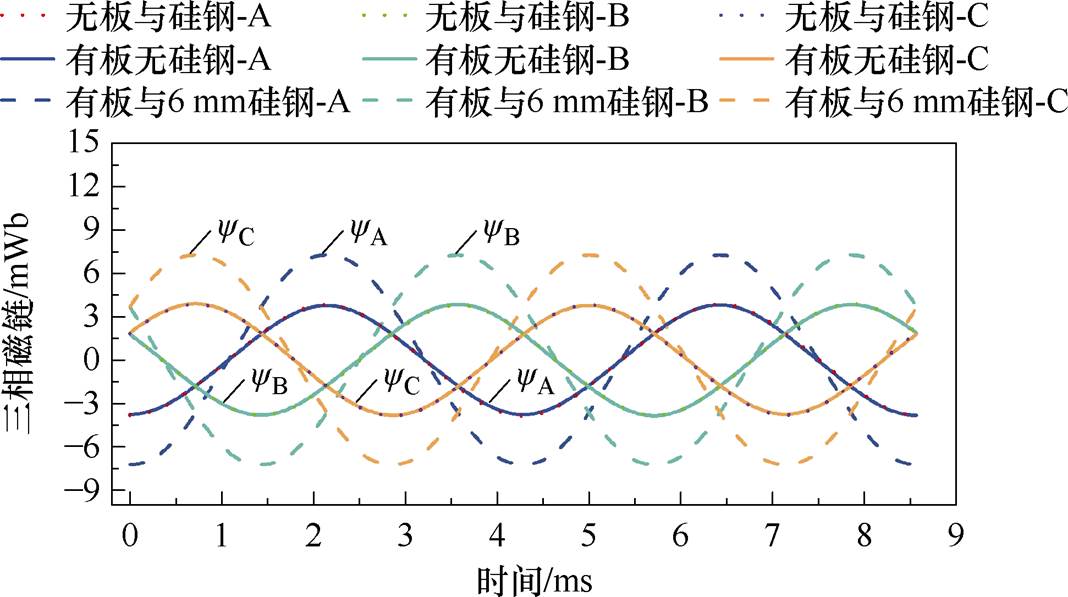
图14 硅钢材料对内部磁链的影响
Fig.14 Effect of silicon steel material on internal flux linkage
图15为不同转速下,铜导体板产生的涡流效果,感应涡流主要集中在永磁轮电机正下方靠后的位置,这是由于永磁轮在旋转过程,正下方靠后磁通量变化大,下方的感应磁场主要影响永磁轮电机的导向力,永磁轮电机后端产生的感应磁场主要影响推进力。随着转速的增加,导体板切割磁感线的速度加快,导致涡流逐渐趋向于轨道表面,同时涡流的峰值向永磁轮电机正下方靠前方向移动。
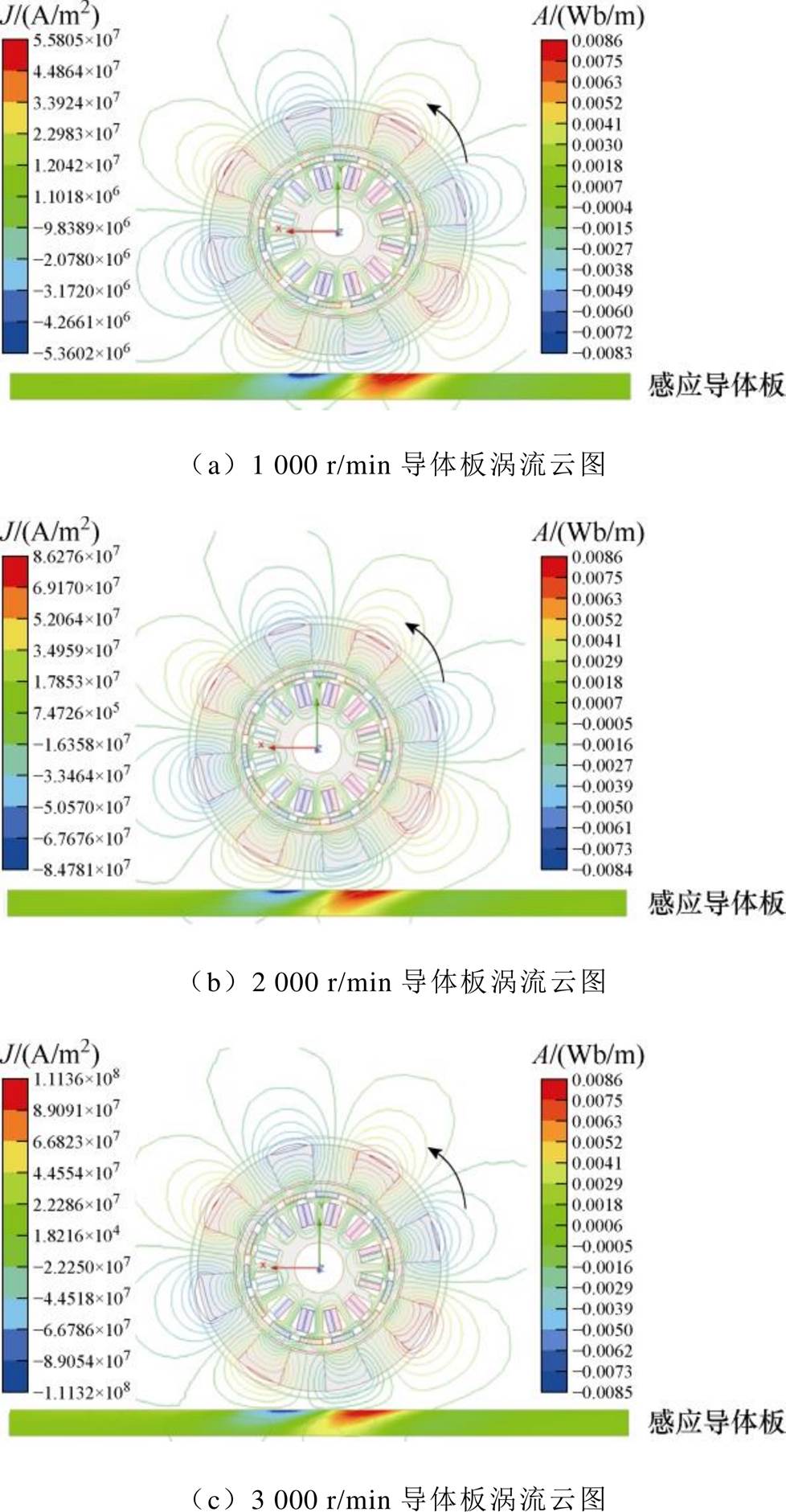
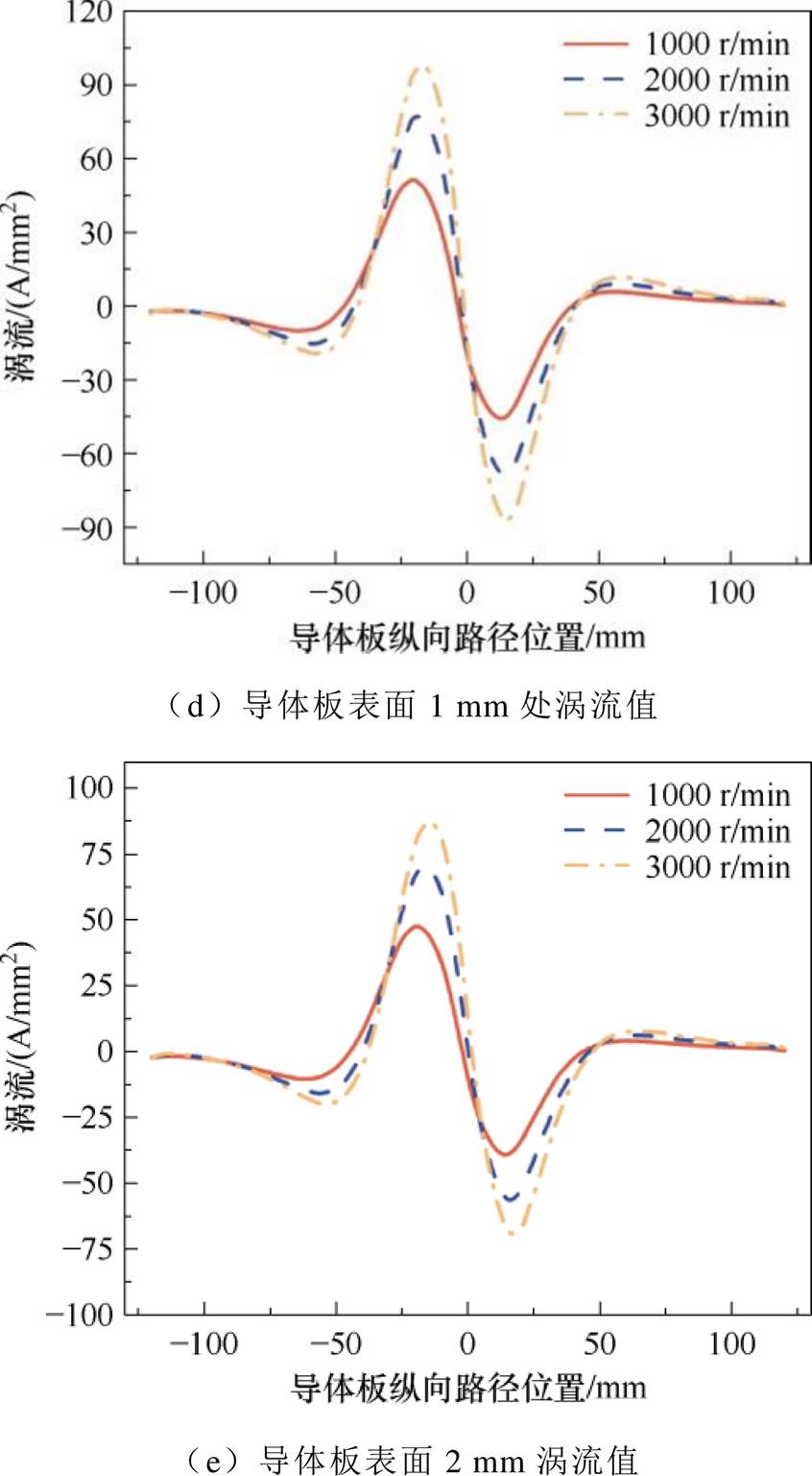
图15 不同转速下,导体板涡流云图及内部涡流大小
Fig.15 Eddy current cloud diagram of conductor plate and internal eddy current at different speeds
通过图16所示的实验装置,对加入硅钢材料的永磁轮电机在0~3 000 r/min的导向力及推进力进行测量。永磁轮电机力检测平台由力传感器及采集系统、永磁轮电机、铜导体板等组成,永磁轮电机固定在实验台上,通过上位机控制永磁轮旋转,铜导体板产生感应磁场与源磁场相互作用产生力,力传感器测量导体板受力并将数据采集。将实验结果与Maxwell仿真所计算结果进行比对,结果如图17所示,所得电磁力变化趋势保持一致。仿真与实验结果存在一定的误差,一方面原因是仿真模型未考虑导体板边缘效应;另一方面,永磁轮电机转速的增大,铜导体板内部产生的感应涡流增大,铜导体板的温度上升,温升致使铜板电导率变小,造成推进力增加,导向力减少,而仿真中未考虑导体板的温度影响。此外,由于导体板纯度不高、永磁轮加工机械磨损以及永磁轮长期使用后导致其磁通密度减小,最终导致实验值与仿真值出现误差。
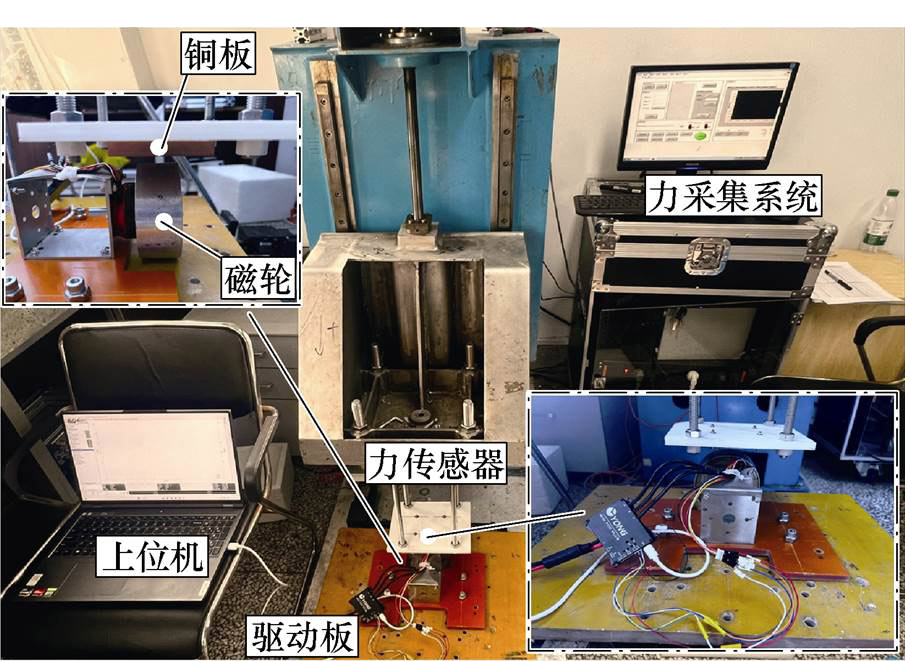
图16 永磁轮电机力检测实验平台
Fig.16 The force detection experimental platform of PMEDW motor
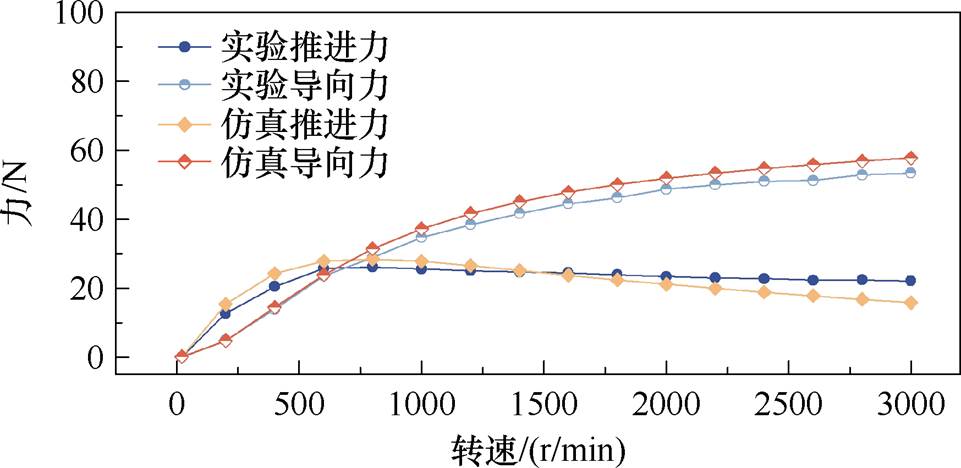
图17 电磁力实验与仿真对比
Fig.17 Comparison of force experiment and simulation
为了进一步提升永磁轮电机的整体性能效果,接下来将对其控制系统进行仿真分析。根据实验得出的推进力与转速关系进行拟合,拟合结果为
 (36)
(36)
根据表2的参数,构建永磁轮电机的Simulink控制系统,电流限幅为80 A。
永磁轮电机空载起动,目标推进力为15 N,结果如图18所示。可以观察到推进力响应曲线中双环PI控制响应速度最慢,同时,产生的超调量最大。而加入MPC后,响应时间与超调量都明显减小,响应时间从0.539 s减小至0.414 s,超调量从22.5%减小至8.6%。继续引入ADRC后,响应时间减小至0.016 s,超调量低于1%。在0.8 s时加入负载0.5 N·m,1.5 s时减载至0.2 N·m,由图18中可以看出,RAM下的推进力波动最小,能够更好地适应永磁轮电机推进力的突变,实现更精确的推进力跟踪控制,转速与导向力曲线趋势与推进力趋势一致。
表2 永磁轮电机仿真参数
Tab.2 The simulation parameters of PMEDW motor
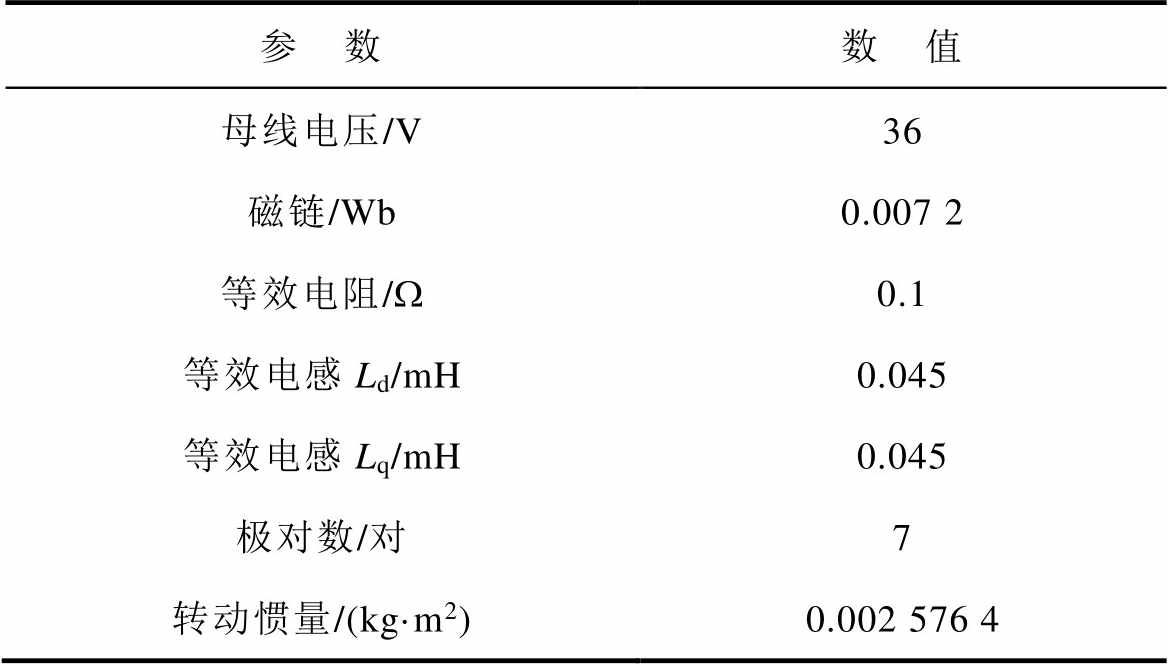
参 数数 值 母线电压/V36 磁链/Wb0.007 2 等效电阻/W0.1 等效电感Ld/mH0.045 等效电感Lq/mH0.045 极对数/对7 转动惯量/(kg·m2)0.002 576 4
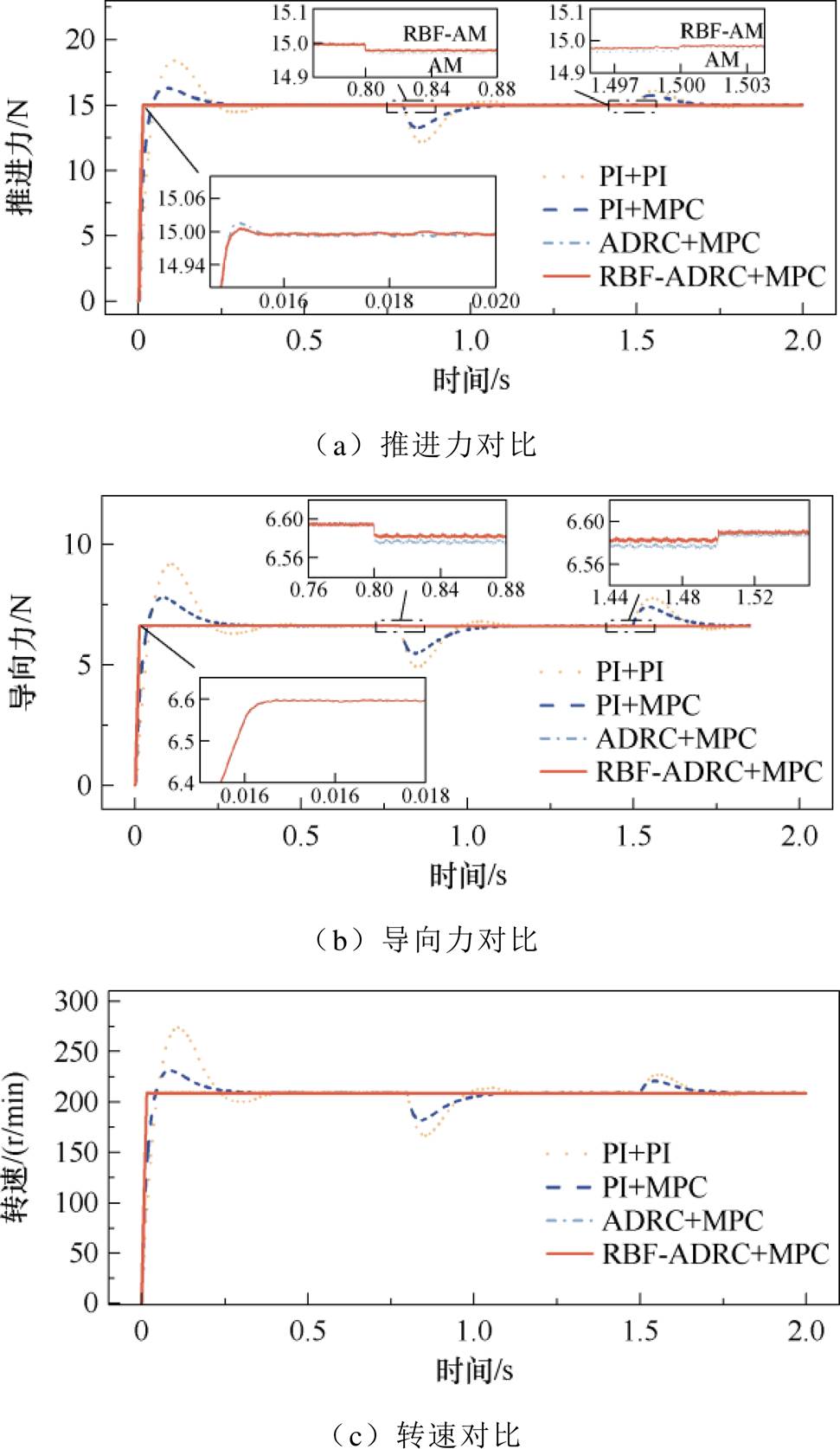
图18 空载起动,加减载电磁力与转速动态曲线
Fig.18 No-load start, the curves of the electromagnetic force and speed dynamics of the load plus or minus
为研究永磁轮电机系统的抗干扰性,在0.8 s时,加入2 N·m负载,1.5 s减载至1 N·m。ADRC中ESO的b1和b2通过试凑法分别设置为3 000和10。加入RBF参数自整定后其参数变化曲线如图19所示。0.8 s时加入负载,b1从175 747.268变为175 750.556,b2从1 757.549变为1 757.587。从图19中可以看出,RAM算法中,可以在线整定参数,根据外界条件的变化,不需要人工重新调参,实时自动调整ESO中b1、b2的参数。
图20为0.8 s时,加入2 N·m后四种控制方式的转矩变化情况,可以看出,双环PI控制的电磁转矩在负载加入后迅速上升,但波动较大,稳定性稍差。加入MPC的电磁转矩在加入负载后,响应速度较快,波动幅度有所减少。ADRC+MPC的电磁转矩在负载变化时,电磁转矩迅速达到目标值。在负载加入后,RAM控制电磁转矩迅速平稳过渡,几乎无明显波动,显示出最好的控制效果。
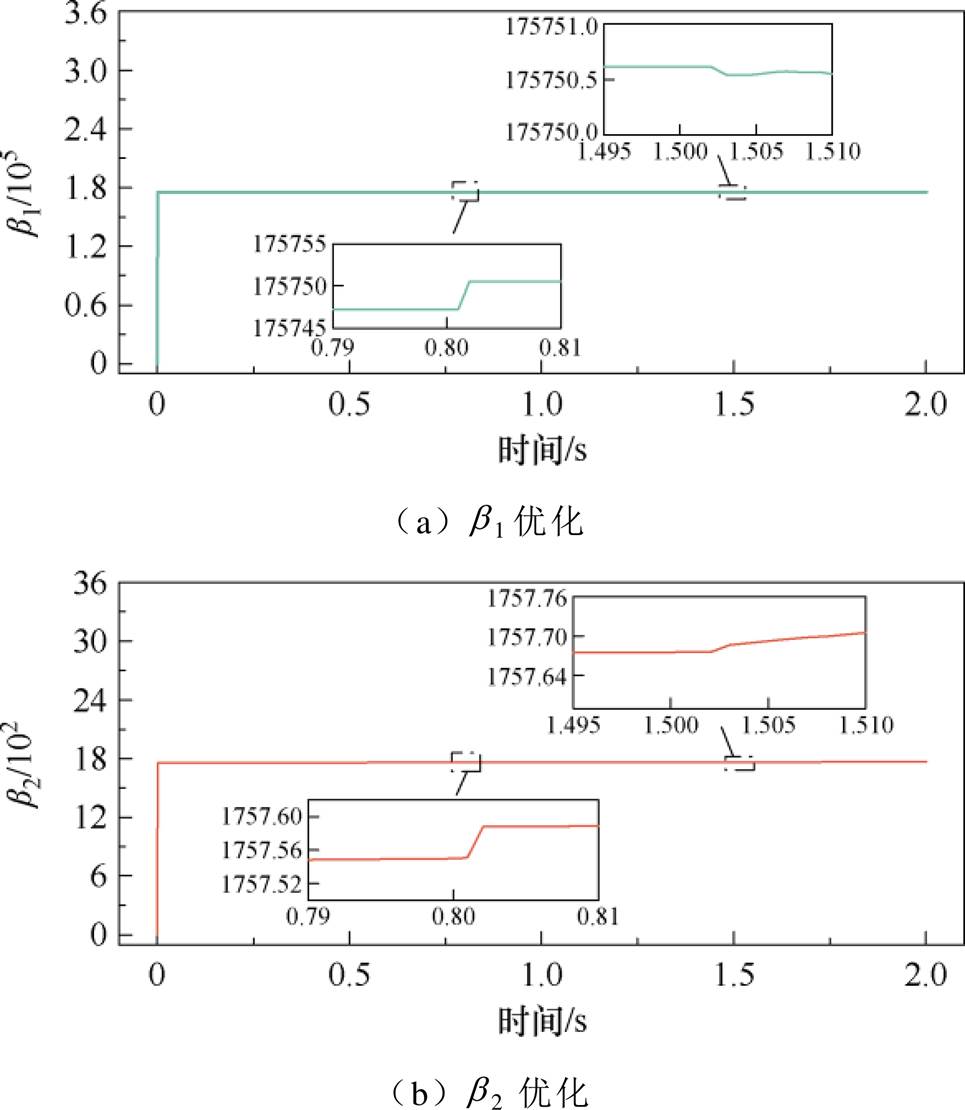
图19 ESO参数整定曲线
Fig.19 The curves of the ESO parameter tuning
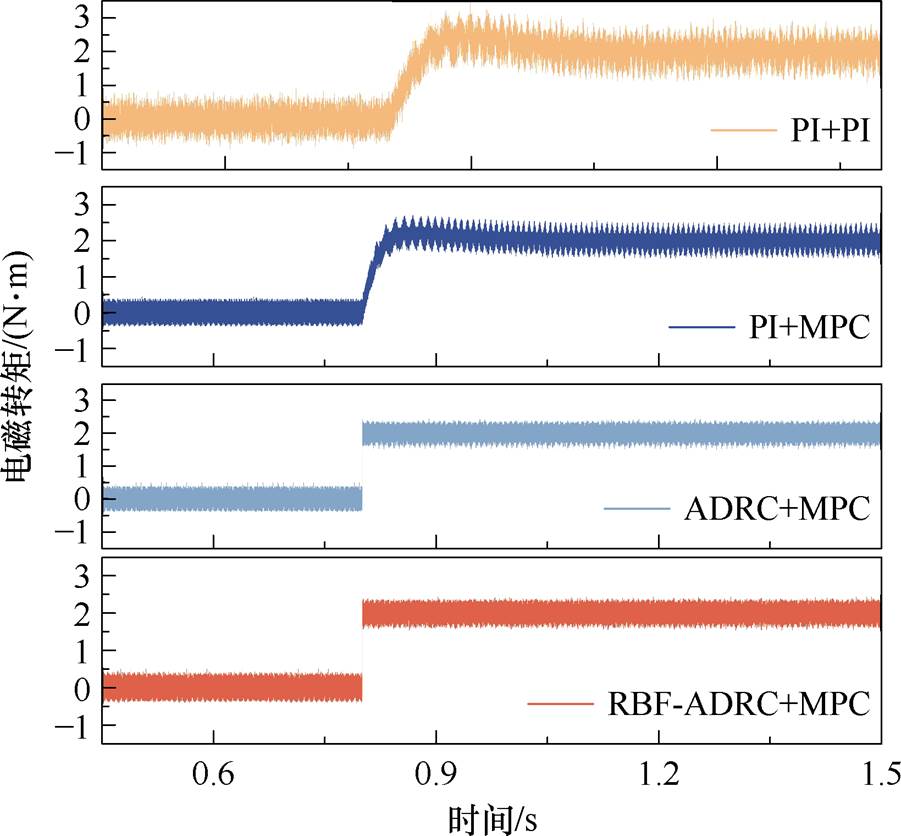
图20 0.8 s时加入2 N·m转矩曲线
Fig.20 The curves with 2 N·m torque is added at 0.8 s
永磁轮电机的推进力达到目标值15 N后,在1 s时将推进力目标值提升至20 N,并在4 s时恢复至15 N,得到的曲线如图21所示,图中同时给出了A相电流曲线与电磁转矩曲线,可以发现,电流的波动幅度在双环PI控制方法下最大,因其鲁棒性较差,难以应对突变,表明该方法的稳定性较差。PI+MPC有一些突出的电流波动尖峰。RAM在ADRC与MPC的基础上加入RBF神经网络,根据外界扰动实时调整ESO的参数,且电流波动较小,相对稳定且抖动最小,表明其具有良好的抗扰动能力和系统稳定性。从电磁转矩来看,RAM控制下的波动最小,PI+MPC和ADRC+MPC的波动幅度较为接近,也表现出了较好的性能。双环PI控制在转矩波动上相对较大,尤其是在瞬态过程中。综上所述,RAM是四种控制方法中表现最优的,具有较好的抗干扰能力、平稳的推进力控制和最小的电流波动,电磁转矩波动也最小。
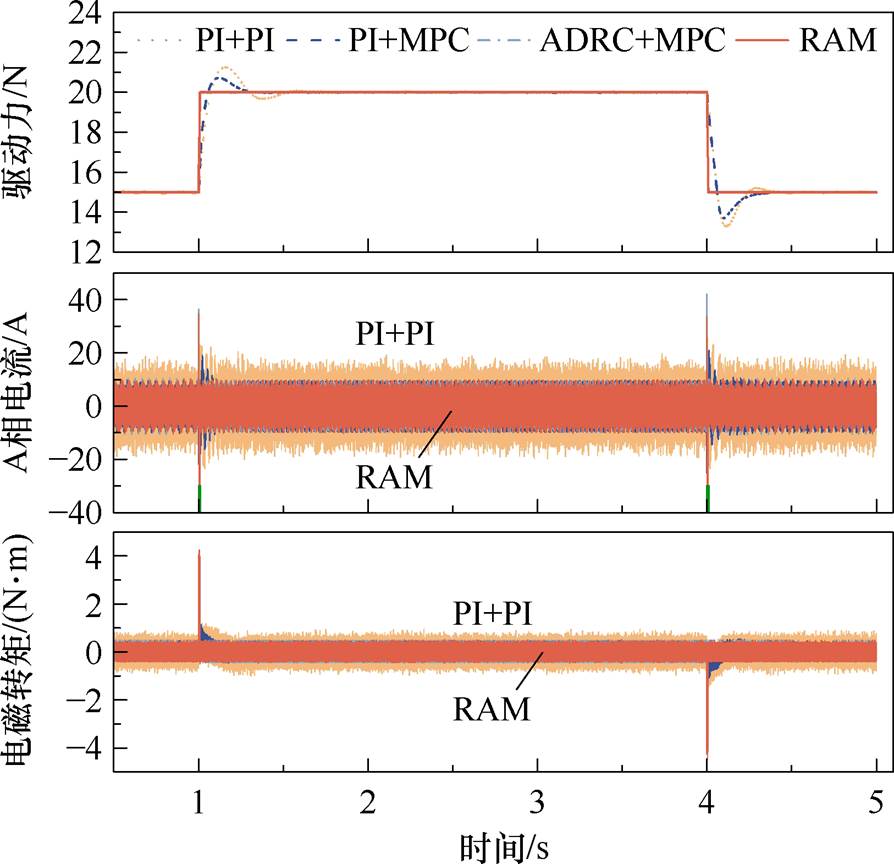
图21 动态调整推进力曲线
Fig.21 The dynamically adjust the curves of the driving force
通过Simulink与Maxwell联合仿真,得到了推进力与转速的动态响应曲线,如图22所示。可以看出,电流控制器采用MPC算法时,相比PI控制更快达到目标值,但在稳态阶段存在一定的波动,其稳态输出值在14.69~15.01 N范围内变化。将双PI控制器都替换并使用RAM控制时,波动误差得到了改善,并在0.008 s达到目标值,响应速度优于另外两种控制策略,转速与导向力的趋势与推进力基本一致。此外,RAM控制器通过自适应调节减少了对整定参数的依赖,降低了参数调试的难度。
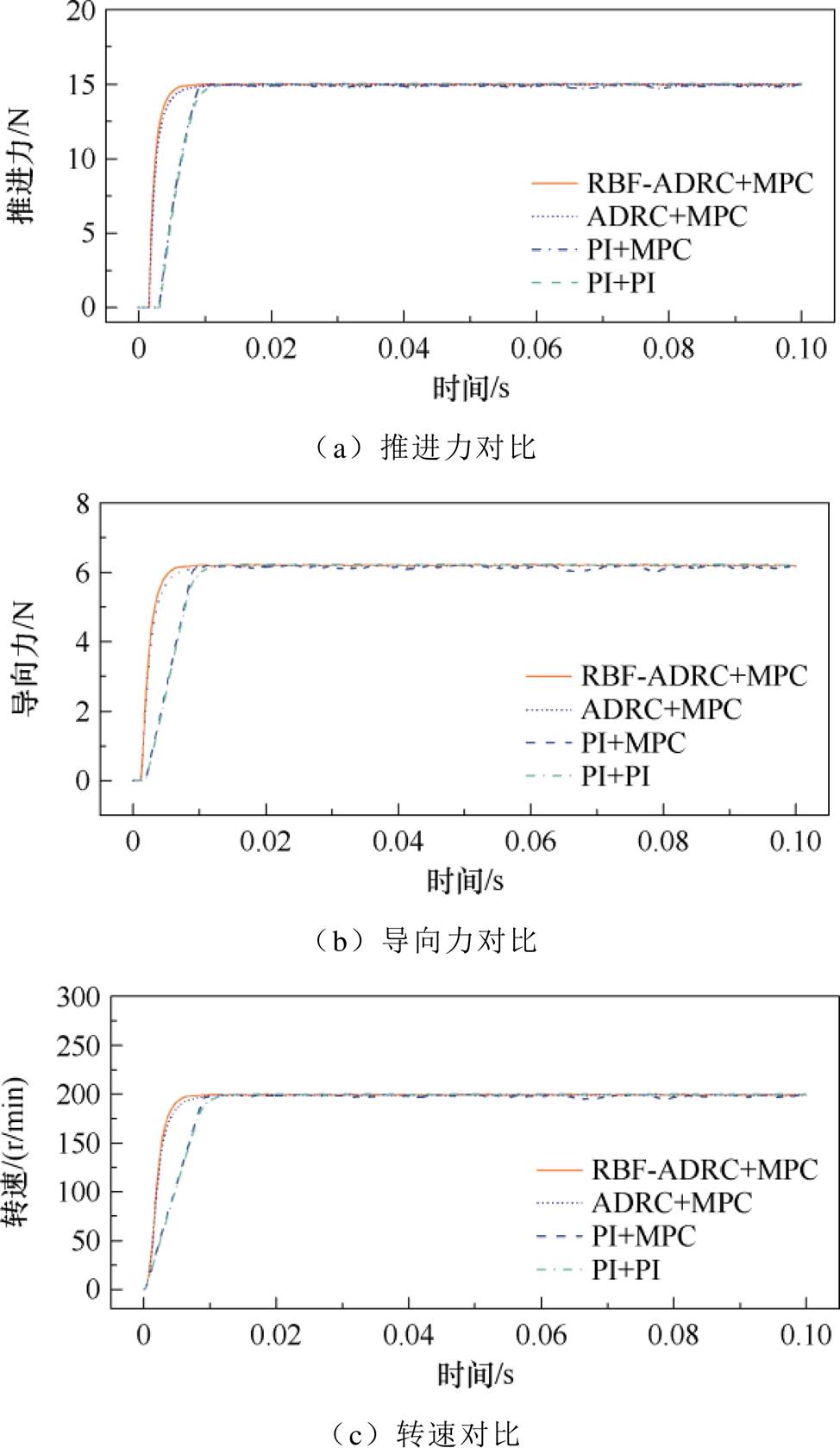
图22 电磁力与转速动态响应曲线
Fig.22 Dynamic response curves of driving force and rotational speed
本文针对目前永磁轮驱动系统存在推进力变化不能及时反馈、响应时间滞后等问题,提出了一种RAM控制策略,具有响应速度快、自适应强、鲁棒性强的优点,弥补了目前永磁轮电机控制的不足,此外,改进了IPMEDWM的结构,主要得出如下结论:
1)在环形Halbach阵列与NS极永磁体之间加入硅钢材料优化磁路设计,结果表明,当硅钢材料厚度为6 mm时,三相磁链幅值提升了94.97%,磁场利用率显著提高,电磁转矩性能得到改善,同时漏磁场情况得到了有效抑制。
2)提出的RAM控制策略实现了对永磁轮电机推进力的快速、平稳控制。Simulink仿真结果表明,RAM控制相比PI控制,响应时间减小了约0.5 s,超调量减少了约22.4%,且在负载变化下表现出更强的抗干扰能力,通过联合仿真验证了RAM控制的有效性。
3)在突加负载、推进力突变等复杂工况下,RAM控制策略通过RBF神经网络实现对ESO参数的实时调整。结果表明,RAM控制不仅在突变负载条件下快速恢复目标值,还表现出较低的电流波动和电磁转矩波动,显著优于PI控制,有较强的动态适应性和鲁棒性。
本文提出的RAM控制策略能实现对永磁轮电机推进力的快速、精确控制,并且具有较好的抗干扰性,更适用于高温超导钉扎磁悬浮列车的永磁轮驱动系统,为未来新型磁悬浮列车驱动方式、涡流制动器、无接触式输送板的设计提供了参考和助力。
参考文献
[1] 张卫华, 邓自刚, 毕海权, 等. 低真空超高速轨道交通研究进展与思考[J]. 机车电传动, 2025(1): 1-13.
Zhang Weihua, Deng Zigang, Bi Haiquan, et al. Research review and reflections on ultra-high-speed rail transit in low-vacuum environments[J]. Electric Drive for Locomotives, 2025(1): 1-13.
[2] Yuan Yuan, Deng Zigang, Zhang Shuai, et al. Working principle and primary electromagnetic characteristics of a permanent magnet electrodynamic wheel for maglev car application[J]. IEEE Transactions on Applied Superconductivity, 2021, 31(8): 1-5.
[3] Lin Peng, Deng Zigang, Ke Zhihao, et al. Dynamic characteristics and working modes of permanent magnet electrodynamic suspension vehicle system based on six wheels of annular halbach structure[J]. Technologies, 2023, 11(1): 16.
[4] 陈怡浩, 梁乐, 刘新, 等. 环形Halbach永磁轮新型充磁设计及磁力特性研究[J]. 机车电传动, 2024(4): 107-117.
Chen Yihao, Liang Le, Liu Xin, et al. Novel design of magnetization and study of magnetic force characteri- stics of annular Halbach permanent magnet electro- dynamic wheel[J]. Electric drive for locomotives, 2024(4): 107-117.
[5] 刘新, 邓自刚, 梁乐, 等. 基于斜置环形Halbach永磁轮的磁浮列车“悬浮-导向-推进”一体化方案设计[J]. 机车电传动, 2023(2): 90-96.
Liu Xin, Deng Zigang, Liang Le, et al. Levitation- guidance-propulsion integrated design for maglev trains based on oblique ring Halbach permanent magnet wheels[J]. Electric Drive for Locomotives, 2023(2): 90-96.
[6] Deng Zigang, Shi Hongfu, Chen Yihao, et al. A cost-effective linear propulsion system featuring PMEDW for HTS maglev vehicle: design, imple- mentation, and dynamic test[J]. Measurement, 2025, 240: 115618.
[7] Kushwaha A, Endla N, Fernandes B G. Motor integrated rotating permanent magnet based electro- dynamic suspension device: part II: investigation of coupled topology[J]. IEEE Transactions on Energy Conversion, 2023, 38(3): 1715-1726.
[8] Park J H, Choi J H, Kim D H, et al. Parametric design of the levitation mechanism for maglev planar trans- portation vehicle[J]. IEEE Transactions on Magnetics, 2004, 40(4): 3069-3071.
[9] Bird J, Lipo T A. Characteristics of an electrodynamic wheel using a 2-D steady-state model[J]. IEEE Transactions on Magnetics, 2007, 43(8): 3395-3405.
[10] 秦伟, 范瑜, 朱熙. 永磁磁轮磁悬浮力的解析与数值方法研究[J]. 微计算机信息, 2010, 26(13): 218- 219, 204.
Qin Wei, Fan Yu, Zhu Xi. Levitation force analysis of a permanent magnet wheel[J]. Microcomputer Infor- mation, 2010, 26(13): 218-219, 204.
[11] Paul S, Bird J Z. A 3-D analytic eddy current model for a finite width conductive plate[J]. COMPEL: the International Journal for Computation and Mathe- matics in Electrical and Electronic Engineering, 2013, 33(1/2): 688-706.
[12] Zhang Ze, Deng Zigang, Zhang Shuai, et al. Design and operating mode study of a new concept maglev car employing permanent magnet electrodynamic suspension technology[J]. Sustainability, 2021, 13(11): 5827.
[13] 石秦赓, 朱俊杰, 韩一, 等. 基于自适应滑模观测器的永磁同步电机负载转矩辨识[J]. 电工技术学报, 2025, 40(12): 3868-3882.
Shi Qingeng, Zhu Junjie, Han Yi, et al. Load torque identification of permanent magnet synchronous motor based on adaptive sliding mode observer[J]. Transactions of China Electrotechnical Society, 2025, 40(12): 3868-3882.
[14] 刘忠永, 范涛, 何国林, 等. 高性能永磁同步电机显式模型预测控制算法研究[J]. 电工技术学报, 2023, 38(22): 6039-6058.
Liu Zhongyong, Fan Tao, He Guolin, et al. Research on high-performance explicit model predictive control algorithm for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2023, 38(22): 6039-6058.
[15] 赵鑫宇, 王丽梅. 永磁直线同步电机自适应分数阶终端滑模控制[J]. 电工技术学报, 2023, 38(20): 5434-5443.
Zhao Xinyu, Wang Limei. Adaptive fractional-order terminal sliding mode control for permanent magnet linear synchronous motor[J]. Transactions of China Electrotechnical Society, 2023, 38(20): 5434-5443.
[16] Gao Zhiqiang. Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the 2003 American Control Conference, Denver, CO, USA, 2003: 4989-4996.
[17] 李思毅, 苏健勇, 杨贵杰. 基于自抗扰控制的永磁同步电机弱磁控制策略[J]. 电工技术学报, 2022, 37(23): 6135-6144.
Li Siyi, Su Jianyong, Yang Guijie. Flux weakening control strategy of permanent magnet synchronous motor based on active disturbance rejection control[J]. Transactions of China Electrotechnical Society, 2022, 37(23): 6135-6144.
[18] 徐奇伟, 龙学汉, 苗轶如, 等. 永磁同步电机双矢量模型预测控制的计算量优化方法研究[J]. 电机与控制学报, 2025, 29(5): 19-30.
Xu Qiwei, Long Xuehan, Miao Yiru, et al. Double- vector model predictive current control for PMSM drive system with low calculation burden[J]. Electric Machines and Control, 2025, 29(5): 19-30.
[19] Moon H T, Kim H S, Youn M J. A discrete-time predictive current control for PMSM[J]. IEEE Transa- ctions on Power Electronics, 2003, 18(1): 464-472.
[20] 邵文强. 基于RBF神经网络的永磁同步电机控制系统[D]. 哈尔滨: 哈尔滨理工大学, 2019.
Shao Wenqiang. Permanent magnet synchronous motor control system based on RBF neural net- work[D]. Harbin: Harbin University of Science and Technology, 2019.
[21] Chen Yihao, Liang Le, Lin Wangxuan, et al. Novel induction plate configuration for permanent magnet electrodynamic wheel systems based on electro- magnetic force optimization and its implementation on HTS system[J]. Physica Scripta, 2025, 100(3): 035512.
[22] 陈卓易, 邱建琪, 金孟加. 永磁同步电机有限集无参数模型预测控制[J]. 电机与控制学报, 2019, 23(1): 19-26.
Chen Zhuoyi, Qiu Jianqi, Jin Mengjia. Finite control set nonparametric model predictive control for permanent magnet synchronous machines[J]. Electric Machines and Control, 2019, 23(1): 19-26.
[23] 闫美洁. 基于模型预测的无位置传感器无刷直流电机控制策略研究[D]. 长春: 吉林大学, 2022.
Yan Meijie. Research on control strategy of sensor- less brushless DC motor based on model predi- ction[D]. Changchun: Jilin University, 2022.
[24] 王建渊, 王海啸, 尹忠刚, 等. 基于一阶线性自抗扰控制器的同步磁阻电机无速度传感器控制[J]. 电工技术学报, 2024, 39(14): 4405-4421.
Wang Jianyuan, Wang Haixiao, Yin Zhonggang, et al. Sensorless control of synchronous reluctance motor based on first order linear active disturbance rejection controller[J]. Transactions of China Electrotechnical Society, 2024, 39(14): 4405-4421.
[25] 陈志旺, 张子振, 曹玉洁. 自抗扰fal函数改进及在四旋翼姿态控制中的应用[J]. 控制与决策, 2018, 33(10): 1901-1907.
Chen Zhiwang, Zhang Zizhen, Cao Yujie. Fal function improvement of ADRC and its application in quadrotor aircraft attitude control[J]. Control and Decision, 2018, 33(10): 1901-1907.
[26] Lozgachev G I. On a method of construction of Lyapunov functions[J]. Automation and Remote Control, 2006, 59: 1365-1369.
[27] 刘志赢, 汪友华, 刘成成, 等. 基于多岛遗传算法与响应面法的横向磁通感应加热装置参数优化设计[J]. 电工技术学报, 2024, 39(10): 3180-3191.
Liu Zhiying, Wang Youhua, Liu Chengcheng, et al. Optimization design of parameters for transverse flux induction heating device based on multi-island genetic algorithm and response surface method[J]. Transactions of China Electrotechnical Society, 2024, 39(10): 3180-3191.
Abstract With the development of maglev transportation technology, the existing high-temperature superconducting maglev trains that use a long-stator linear motor as the driving system face high costs, complex structures, and complex control systems. The Halbach Permanent Magnet Electrodynamic Wheel (PM EDW) has a simple structure and low engineering cost. It can convert magnetic resistance into propulsion force and is expected to replace linear motors. The working principle of PM EDW is to drive rotation. The interaction between the rotating magnetic field generated by the PM EDW and the conductor plate eventually produces the electromagnetic force. In this paper, PM EDW and drive motor structures are coupled to construct the PM EDW motor. However, the PM EDW motor drive system is a strongly coupled, nonlinear, and multi-variable system. Therefore, this paper proposes an improved active disturbance rejection control (ADRC) strategy based on model predictive control (MPC) to rapidly control the propulsion force and improve the system’s anti-interference ability and stability.
Firstly, the PM EDW motor structure is optimized by introducing a 6 mm-thick silicon steel sheet between the Halbach permanent magnet array and the conventional NS pole permanent magnet. This action significantly concentrates the flux path, reduces the flux leakage, and increases the flux density at the air gap. The simulation results show that the optimized design increases the amplitude of the three-phase flux linkage by about 94.97%, improving the magnetic field utilization and electromagnetic torque.
Secondly, to obtain the electromagnetic characteristics of the PM EDW motor under actual operation, the propulsion and guiding forces at different speeds were measured using the PM EDW motor's electromagnetic force test platform. The accuracy of the theoretical model is verified by comparing measured electromagnetic force data with Maxwell finite-element simulation results. A nonlinear fitting relationship between the propulsion force and the speed is obtained, providing support for control system modeling.
In terms of control system design, this paper proposes a hybrid control strategy of improved ADRC and MPC, referred to as RAM controller (RBF-ADRC-MPC, RAM). Among them, the current inner loop uses MPC to achieve high-precision adjustment, avoiding the overshoot and oscillation problems of traditional PI control. The improved ADRC is used in the outer loop control to enhance the system response speed and interference suppression. To address the cumbersome problem of ADRC parameter tuning, the RAM controller introduces an RBF neural network to dynamically adjust the parameters b1 and b2 online, thereby enabling self-tuning and enhancing the control system’s adaptability to environmental changes.
Compared with PI control, RAM control reduces response time by about 0.5 s, reduces the overshoot by about 22.4%, and demonstrates stronger anti-interference ability under load changes. The effectiveness of RAM control is verified by co-simulation.
The proposed RAM control strategy can achieve rapid and accurate control of the propulsion force and exhibits strong anti-interference, making it suitable for the magnetic wheel drive system of the high-temperature superconducting pin maglev train. It provides a reference and helps with the design of a new maglev train driving mode, an eddy current brake, and a non-contact conveyor plate in the future.
keywords:Permanent magnet electrodynamic wheel motor, integrated permanent magnet electrodynamic wheel motor, model predictive control, active disturbance rejection control, radial basis function neural network
DOI: 10.19595/j.cnki.1000-6753.tces.250796
中图分类号:TM351
四川省自然科学基金资助项目(2026NSFSCZY0072)。
收稿日期 2025-05-13
改稿日期 2025-06-19
林旺煊 男,2001年生,硕士研究生,研究方向为电机控制。E-mail: wxuan@my.swjtu.edu.cn
邓自刚 男,1982年生,研究员,博士生导师,研究方向为磁悬浮动力技术及应用。E-mail: deng@swjtu.edu.cn(通信作者)
(编辑 崔文静)