图1 GFLI并网系统结构
Fig.1 System structure of GFLI
摘要 新能源并网逆变器接入弱电网时易在大扰动下同步失稳,易致新能源系统脱网,影响电力系统的安全稳定运行。该文针对跟网型并网逆变器在大扰动下的同步稳定性问题,构建了考虑锁相环动态和电网阻抗的跟网型逆变器降阶模型,在所建模型基础上结合相平面法研究了电网电压暂降时跟网型逆变器的同步失稳问题,发现锁相环在暂态过程中具有负阻尼效应,是导致逆变器同步失稳的主要因素。基于此,该文提出了一种改进锁相方法,通过在传统锁相环结构中引入频率偏差反馈,提升了锁相环的等效转动惯量和阻尼系数,增强了逆变器在大扰动下的同步稳定性。最后搭建了2 MW并网逆变器仿真模型和硬件在环实验平台,结果验证了所提方法的有效性。
关键词:新能源发电 跟网型并网逆变器 锁相环 同步稳定性 稳定控制
随着电力系统“双高”比例持续提升,使电网强度下降,传统基于锁相环(Phase-Locked Loop, PLL)的跟网型并网逆变器(Grid Following Inverter, GFLI)与电网的交互耦合作用增强,电网故障等暂态事件下GFLI失稳风险增加,易导致新能源机组脱网,继而引发停电等连锁反应[1-3]。GFLI作为新能源机组连接电力系统的核心装备,其性能直接影响电力系统的安全稳定运行[4-6]。因此,研究暂态事件下GFLI的稳定性问题至关重要。
关于GFLI的稳定性问题研究可分为小信号稳定与大信号稳定(即同步稳定)两类[7]。目前关于GFLI小信号稳定性的研究已较为全面[8-10]。然而,小信号稳定性无法有效地表征系统的全局非线性特性,且研究仅针对小扰动展开,分析方法和结果难以沿用至电网故障、大负载切换等暂态事件下的同步稳定性分析[11]。因此,关于GFLI的同步稳定性研究必不可少。随着电网“双高”特性进一步显著,电网短时故障等暂态事件下新能源机组同步失稳现象越发严重,亟须对GFLI并网系统的同步稳定性问题展开深入研究,并提出同步稳定性提升控制方法,增强新能源机组对电网暂态过程的适应性。
GFLI并网系统建模是同步稳定性分析的基础,系统模型精度直接影响分析结果的准确度。文献[12-13]建立了考虑电流环和PLL动态及电网阻抗特性的GFLI并网系统全阶模型,在此基础上对系统同步稳定性进行分析。然而,由于所建GFLI并网系统模型阶数高(12阶),分析过程变得复杂,分析结果不能有效揭示同步失稳机理,难以沿用至多新能源机组并网系统的分析中。因此,文献[14]研究了电网故障期间GFLI电流环与PLL的耦合机制,证实了忽略电流环动态进行同步稳定性分析的可行性。文献[15]构建了忽略电流环动态的GFLI并网系统降阶模型,验证了降阶模型在同步稳定性分析中的准确性。大量研究表明,当电流环控制带宽远大于PLL带宽时,GFLI并网系统的同步稳定性由PLL主导,电流环对同步稳定性的影响可忽略不计[16-19]。因此,可通过建立GFLI并网系统的降阶模型简化分析复杂度,并提升其在多机组并网同步稳定性分析中的灵活性。但为保证稳定性分析结果的精度,降阶模型中需考虑PLL动态和电网阻抗的影响[7]。建立GFLI并网系统模型后,即可采用同步稳定性分析方法(如能量函数法、时域仿真法、分叉理论等[18,20-22])对系统进行同步稳定性分析。文献[18]采用相轨迹法分析了GFLI控制参数对其在大扰动下的同步稳定性影响,并根据分析结果推导了PLL控制参数设计方法,在一定程度上提升了系统的稳定性。文献[20]采用Lyapunov直接法定量分析了PLL参数和电网参数对系统同步稳定性的影响。文献[21]基于分叉理论分析了导致系统不稳定周期轨迹(Unstable Periodic Orbits, UPOs)出现和消失的临界条件,并给出了系统参数优化设计准则。然而,上述方法大多仅通过数值计算和仿真得到稳定边界,缺乏对GFLI同步失稳机理的理论解释。不仅如此,同步稳定性提升主要依赖参数优化设计,虽有一定效果,但因参数选取还受GFLI动态性能和电网标准限制,仅采用参数优化设计来提升同步稳定性效果仍然有限。
因GFLI的并网同步稳定性主要受PLL动态性能影响,有学者提出通过改进锁相技术来提升GFLI并网系统的同步稳定性[20,23-26]。文献[20]研究发现,可以通过限制锁相环积分输出来提升逆变器在大扰动下的同步稳定性。该方法虽然有一定效果,但积分上下限的设计依赖所获得的同步稳定边界,而同步稳定边界的高保守性限制了该方法对稳定性的提升能力。文献[23]提出了一种变结构锁相技术,通过自适应调整PLL的积分系数,增强了系统小信号稳定裕度,降低了系统同步失稳风险。然而,该方法依赖对电网电压的实时精准检测,在实际电网电压突降事件下的电压检测延时可能会影响该方法的有效性。文献[24]提出了一种改进的锁相技术,通过在传统PLL结构中引入一个功角反馈线性控制器,增强了GFLI的稳定性。然而,该方法在实现过程中依赖对电网阻抗的实时精准检测,导致实际实现难度较大。文献[25-26]则通过在传统PLL中加入高频频率偏差负反馈对PLL在暂态事件下的性能进行改善,提升了GFLI的同步稳定性。但该方法仅反馈了PLL偏差频率的高频分量,无法消除稳态频率偏差,且未对控制器参数进行优化设计,实际应用时难以实施。
综上所述,GFLI并网系统在暂态事件下的同步稳定性分析与控制仍存在不足,需进一步研究。针对这一问题,本文首先建立了考虑PLL动态和电网阻抗的GFLI并网系统降阶模型。基于所建模型,采用相平面法研究了暂态事件下GFLI的同步稳定性,揭示了影响同步稳定的关键主导参数和机理。分析发现PLL具有负阻尼效应,易导致GFLI并网系统失稳。基于此,提出了一种基于偏差频率和相角反馈的改进PLL技术,并对控制器参数进行了详细优化设计,增强了暂态事件下系统的惯量和阻尼系数,提升了GFLI的同步稳定性。该控制策略无需依赖系统参数,可有效消除PLL的稳态频率偏差,同时具备对系统的主动支撑能力。最后,建立了2 MW GFLI并网系统仿真模型和半实物仿真平台,通过仿真和硬件在环实验验证了所提方法的有效性。
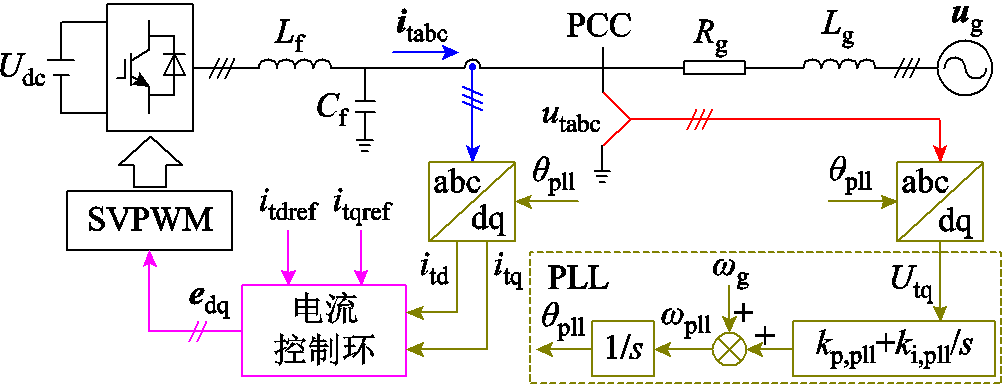
本文研究的GFLI并网系统结构如图1所示。图1中,ug为电网电压,utabc和itabc分别为逆变器并网点(Point of Common Coupling, PCC)电压和电流,Udc为输入直流电压,Rg和Lg分别为PCC点至电网的等效电阻和等效电感,用以表征电网阻抗,Lf和Cf分别为LC滤波器的电感和电容。
图1 GFLI并网系统结构
Fig.1 System structure of GFLI
如图1所示,GFLI通过PLL与电网保持同步运行,PLL的输入为并网点电压utabc的q轴分量Utq,经过运算后输出PLL角频率ωpll和相位θpll,其中kp,pll和ki,pll分别为PLL的PI控制参数,ωg为交流电网额定角频率。
GFLI的电流控制环通过将电流参考值itdref、itqref和实际电流值itd、itq比较运算后(下标d、q分别代表d轴和q轴分量),再经过空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)得到调制信号,最终控制逆变器输出期望的电流值。由于GFLI并网系统电流环控制带宽远大于PLL控制带宽,因此在分析中可忽略电流环动态,将其简化为受控电流源[27],且满足itd=itdref,itd=itdref。
GFLI系统详细参数见表1。
表1 GFLI系统参数
Tab.1 System parameters of GFLI

参数数值 系统额定功率Sn/MW2 电网额定电压Un/V690(1(pu)) 电网额定频率ωg/(rad/s)100 LC滤波电感Lf/μH75.77 LC滤波电容Cf/μF66.86
(续)
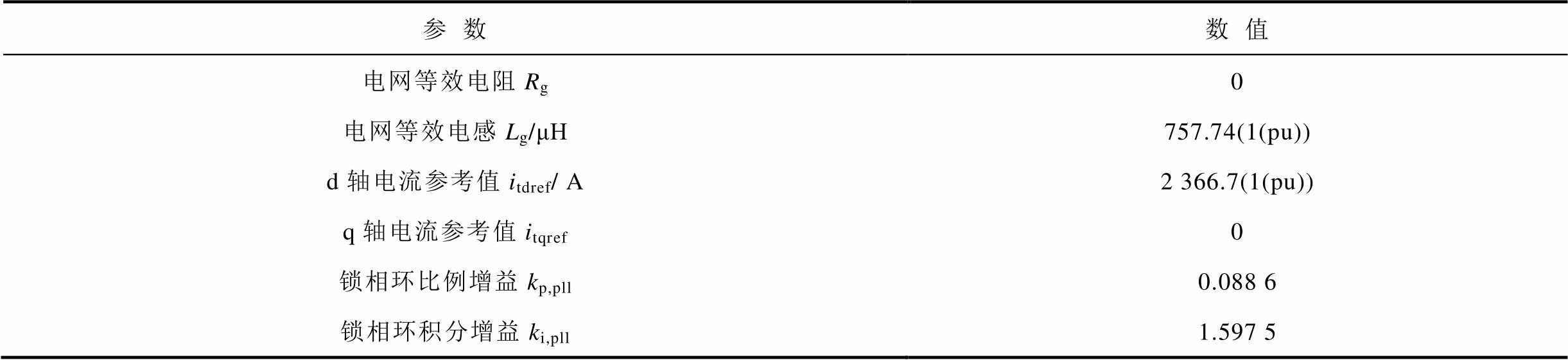
参数数值 电网等效电阻Rg0 电网等效电感Lg/μH757.74(1(pu)) d轴电流参考值itdref/ A2 366.7(1(pu)) q轴电流参考值itqref0 锁相环比例增益kp,pll0.088 6 锁相环积分增益ki,pll1.597 5
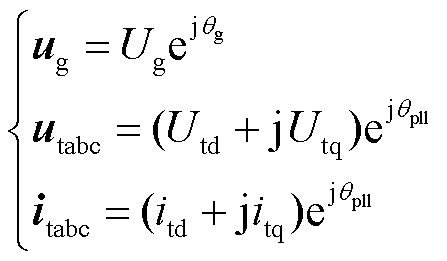
根据图1,GFLI并网系统并网点电压utabc满足
 (1)
(1)
其中
 (2)
(2)
式中,Ug为电网电压幅值; 为电网电压相位。
为电网电压相位。
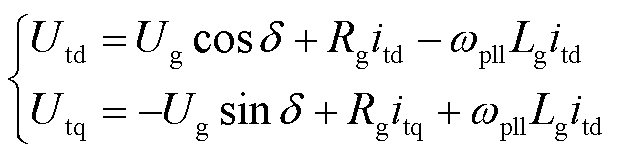
式(1)两边同时乘以 ,联立式(2)可得utabc的dq轴分量表达式为
,联立式(2)可得utabc的dq轴分量表达式为
 (3)
(3)
式中,δ为PLL与交流电网相位差,δ=θpll-θg。
联立图1、式(3),并忽略电流环动态,可得如图2所示的系统降阶模型,图中,Uin=Rgitq+ωgLgitd。
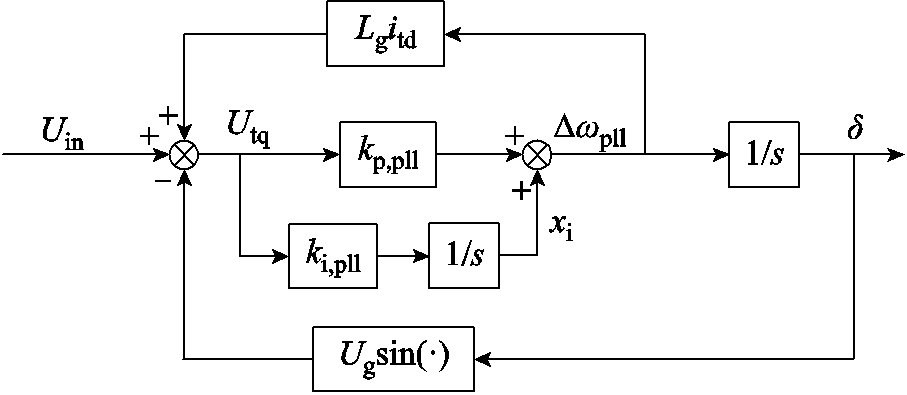
图2 系统降阶模型
Fig.2 System reduced-order model
由图2可得系统降阶动态模型为
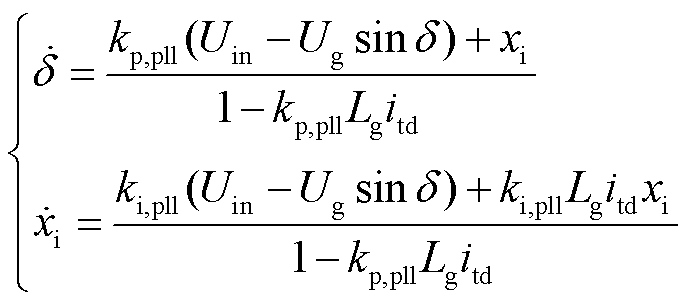 (4)
(4)
为验证降阶模型的有效性,在Matlab/Simulink中分别搭建式(4)所示的降阶模型与考虑电流环的全阶系统模型[13],并进行仿真对比,结果如图3所示。
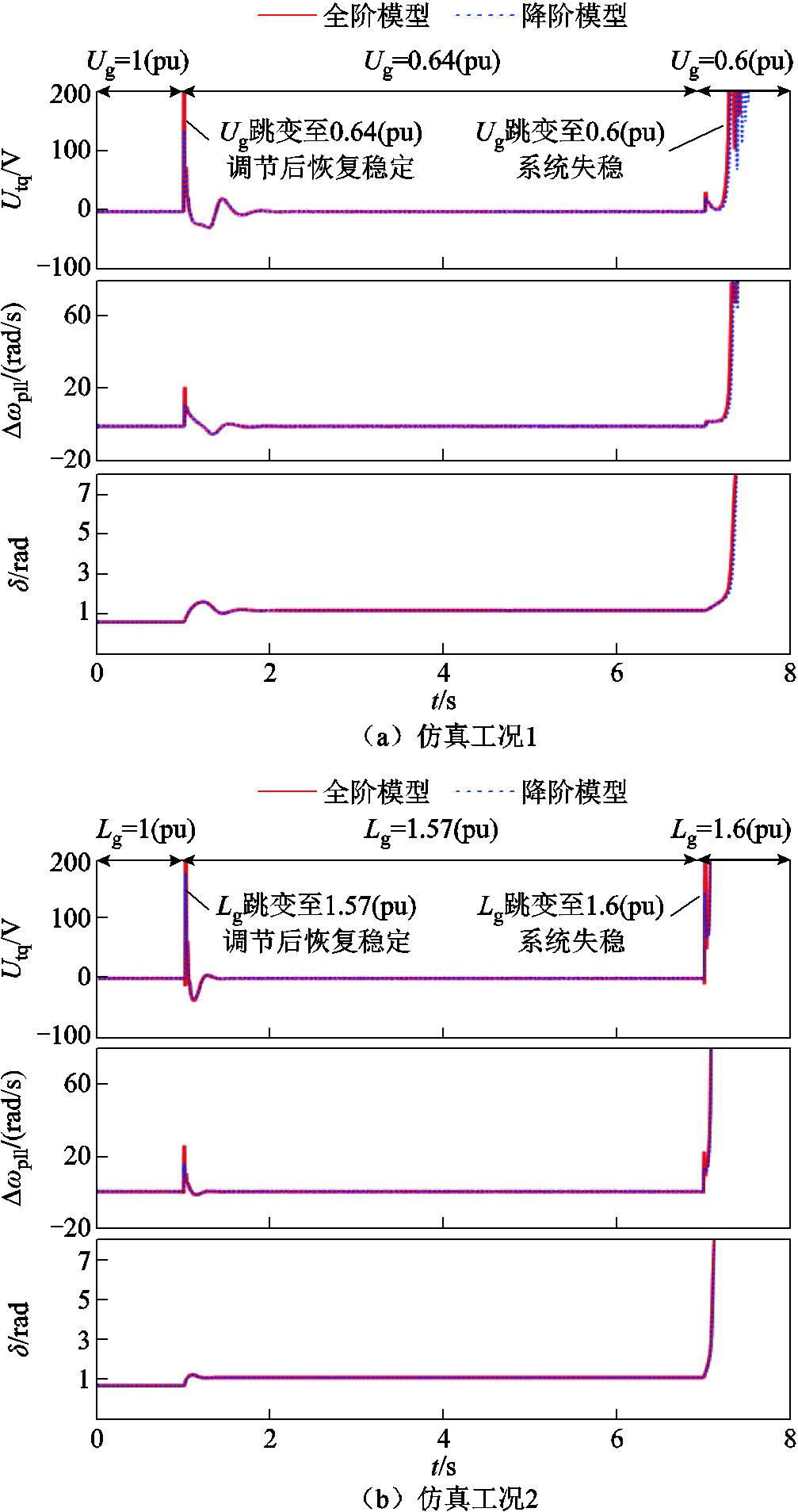
图3 降阶模型与全阶模型仿真对比
Fig.3 Simulation comparison between the reduced-order model and the full-order model
系统初始状态设置为:电网电压Ug=1(pu),电网电感Lg=1(pu),GFLI的参考电流itdref=0.6(pu) (1 420 A)、itqref=0。分别进行以下两种工况下的仿真。
仿真工况1:t=1 s时,电网电压跌落至0.64(pu),t=7 s时,电网电压进一步跌落至0.6(pu)。
仿真工况2:t=1 s时,电网电感跳变至1.57(pu),t=7 s时,电网电感进一步跳变至1.6(pu)。
由图3仿真结果可知,降阶模型与全阶模型具有相同的稳态响应。在系统参数发生跳变后,降阶模型与全阶模型动态响应基本一致。对于δ,两个模型的仿真结果基本重合。对于Utq和Δωpll,全阶模型具有更大的超调,即电流环会增大Utq和Δωpll的超调。然而,对于同步稳定性分析而言,这种差别是可以忽略的。因此,在系统未发生同步失稳时,降阶模型式(4)可以用于系统的同步稳定性分析。
为了分析GFLI的并网同步稳定性,首先可基于式(4)所示模型分析系统是否存在稳态平衡点(Stable Equilibrium Point, SEP),如存在,则可进一步采用相平面法、李雅普诺夫稳定性理论等方法对系统的同步稳定性进行分析,并得出参数对同步稳定性的影响规律,以此优化设计参数。
在分析系统同步稳定性时,必须确保系统存在SEP。在强电网条件下,电网阻抗通常可忽略不计[28],此时Uin=Rgitq+ωgLgitd≈0,必定存在δ使得Uin-Ugsinδ=0,故式(4)所示系统始终存在SEP。然而,在弱电网条件下,电网阻抗通常较大(尤其是Lg较大),Uin不可忽略。此时,根据式(4)可知系统存在平衡点的条件为
 (5)
(5)
根据图1锁相环结构及系统动态方程式(4),当Uin-Ugsinδ>0时,锁相环角速度ωpll将变大,锁相环与电网相位差δ增大;当Uin-Ugsinδ<0时,锁相环角速度ωpll将变小,δ减小。由此可得图4所示的系统平衡点分布情况,图中UEP(unstable equilibrium point)表示系统的非稳态平衡点。
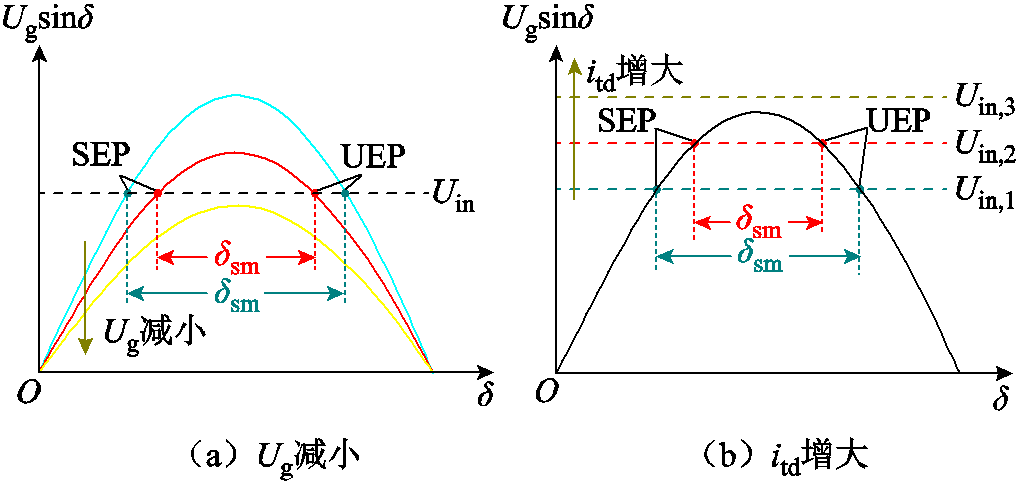
图4 系统参数变化时平衡点分布
Fig.4 Equilibriums when system parameters change
图4a为电网电压Ug变化而Uin不变时系统平衡点的变化情况;图4b为逆变器有功电流itd变化而Ug不变时系统平衡点的变化情况。由图4可知,当Ug和itd变化时,系统SEP(记为(δs, 0))和UEP(记为(δu, 0))的位置均发生改变;当Ug跌落幅度过大或itd过大时,Uin和Ugsinδ将不存在交点,即不满足式(5),此时系统将不存在平衡点,GFLI并网系统失稳。定义同一周期内相邻SEP和UEP之间的相位差δsm为系统的稳定裕度,由图4可知Ug越大或itd越小,系统稳定度越大,系统越稳定。
当明确GFLI并网系统存在SEP后,还需保证系统受到扰动后能够恢复至稳态平衡点,这主要由系统的小信号稳定性确定。因此,可进一步通过小信号分析获取系统稳定条件。
定义系统小信号变量为
 (6)
(6)
联立式(4)和式(6)可得系统在SEP(δs, 0)处的小信号模型为
 (7)
(7)
为保证系统在SEP(δs, 0)处稳定运行,系统小信号模型所对应特征方程的特征根必须均为负实部[29],同时系统稳态功角应满足cosδs>0。因此,系统小信号稳定需满足
 (8)
(8)
 (9)
(9)
 (10)
(10)
综上所述,当条件式(5)、式(8)~式(10)同时满足时,系统存在SEP,且系统在SEP处受到小扰动后仍能保证稳定运行。
在保证GFLI具有稳态平衡点后,可进一步分析GFLI并网系统在暂态事件下的同步稳定性。考虑到电网电压跌落为典型的暂态事件,且对系统稳定性影响较大,本文主要分析电网电压短时跌落后的暂态稳定性问题,并得出暂态稳定的条件。
图5a和图5b分别为电网电压跌落时GFLI与电网再同步及发散失稳的过程。假设GFLI初始运行于SEP A,某一时刻电网电压Ug突然跌落,因相位差δ在电网电压跌落瞬间仍保持不变,GFLI状态由A点切换至B点。此时Uin维持不变,故有Uin-Ugsinδ>0,GFLI角频率ωpll变大,δ增加,GFLI将朝着新SEP C方向运行。当Ug跌落较小,且系统具备足够的同步稳定性时,系统运行超过C点后有Uin-Ugsinδ<0,逆变器角频率ωpll变小,δ减小,系统经过振荡后最终可运行于SEP C。当故障清除后,Ug恢复,GFLI状态由C点切换至E点,并最终恢复至A点。该运行过程如图5a所示。
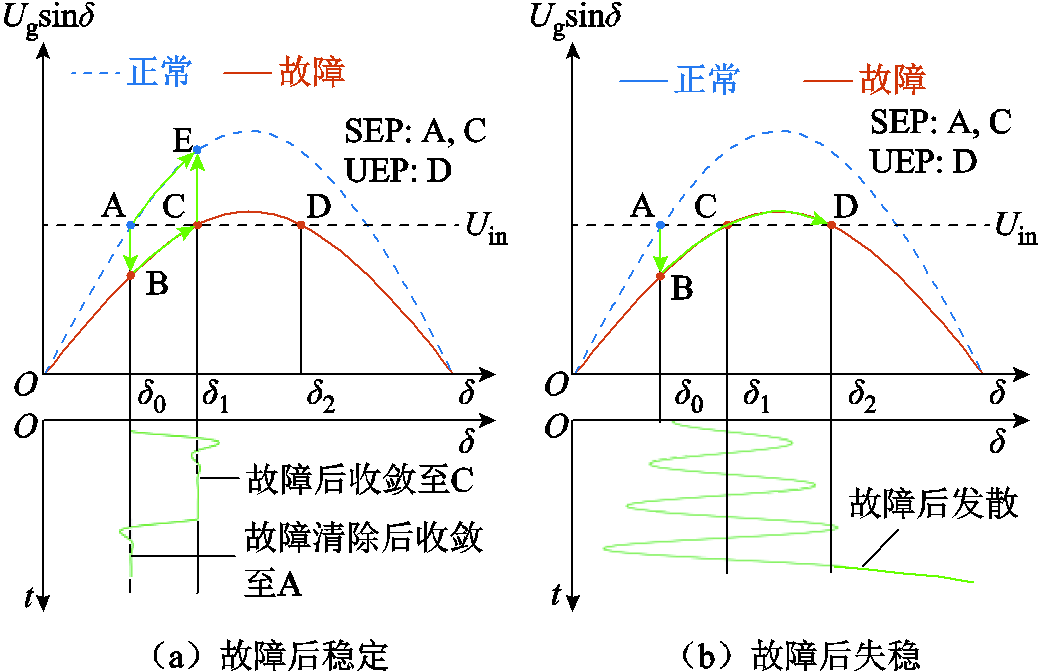
图5 电网电压跌落时GFLI运动过程
Fig.5 Operation process of GFLI when grid voltage drops
当Ug跌落较大或系统同步稳定性不足时,暂态过程中系统相位差δ变化过大,则系统可能运行至UEP D,并最终发散。该运行过程如图5b所示。
根据以上分析可知,GFLI并网系统在发生电网电压跌落等暂态事件后相位差δ会发生振荡,其振荡幅度和频率与系统的惯量和阻尼密切相关,直接影响系统的同步稳定性。为便于直观揭示稳定机理,将式(4)所示系统模型与同步机摇摆方程类比,转换为
 (11)
(11)
其中
 (12)
(12)
式中,Jeq为系统等效转动惯量;Deq为等效阻尼系数;Pm为等效机械功率;Pe为等效电磁功率。
对于传统同步发电机,其转动惯量可抑制系统扰动的影响,减缓暂态事件中系统功率和频率波动。因此,可通过控制增大GFLI的等效转动惯量Jeq抑制因电网电压跌落等暂态事件引起的频率波动,提高新能源并网系统的稳定性。在实际中,一般有kp,pllLgitd 1,因此Jeq可简化为
1,因此Jeq可简化为
 (13)
(13)
由式(13)可知,降低PLL中ki,pll可提升系统的等效转动惯量,即增强了系统的同步稳定性。
阻尼系数Deq可抑制系统振荡,使系统在频率发生较大波动时能够尽快恢复到稳定运行状态。根据式(12),kp,pll、Ug越大,或ki,pll、Lg、itd越小时,系统阻尼系数Deq越大,系统同步稳定性越好。
需要注意的是,增大PLL的比例系数kp,pll可提高系统阻尼系数,增强系统的稳定性。但若kp,pll过大,会使式(12)中的系统等效转动惯量降低(甚至为负),并且会使式(4)中的系统角速度过大,增加系统失稳风险,从而使系统稳定性恶化。因此,实际中kp,pll需优化选取。
将GFLI并网系统模型类比为同步机摇摆方程,可以对系统的同步稳定性进行初步的定性分析,揭示系统的同步稳定机理。然而,在暂态事件下,系统运行参数大范围波动,导致式(12)中的各等效参数大幅变化,使分析的准确性下降。因此,还需进一步对系统同步稳定性进行定量分析。本文通过绘制式(4)的相轨迹来分析获取电网电压跌落等暂态事件下系统参数与同步稳定性的量化关系。考虑到线路电阻会增强系统阻尼,进而增强系统的稳定性[30],为了保证分析的可靠性,本文针对最恶劣的运行情况进行分析,认为Rg=0,即电网阻抗为纯感性,且GFLI以单位功率因数运行(itq=0)。
图6a~图6e分别为不同电网参数和控制参数下GFLI的相轨迹。分析时系统参数设置见表1,系统初始状态为(-0.5rad, 0)。在分析某一参数影响时,其余参数保持不变。由图6可知,Ug、kp,pll越小或Lg、itd、ki,pll越大,系统从初始点收敛至SEP所需经历的相位差δ变化越大,而当参数变化导致的相位差过大时,系统将无法收敛至SEP(如图6中的Ug=0.73(pu),Lg=1.4(pu),itd=0.84(pu),kp,pll=0.008 8,ki,pll=15.975),导致系统相角发散,系统失稳。通过分析,可优化确定kp,pll和ki,pll的取值范围。本文中分别取kp,pll=0.088 6、ki,pll=1.597 5。
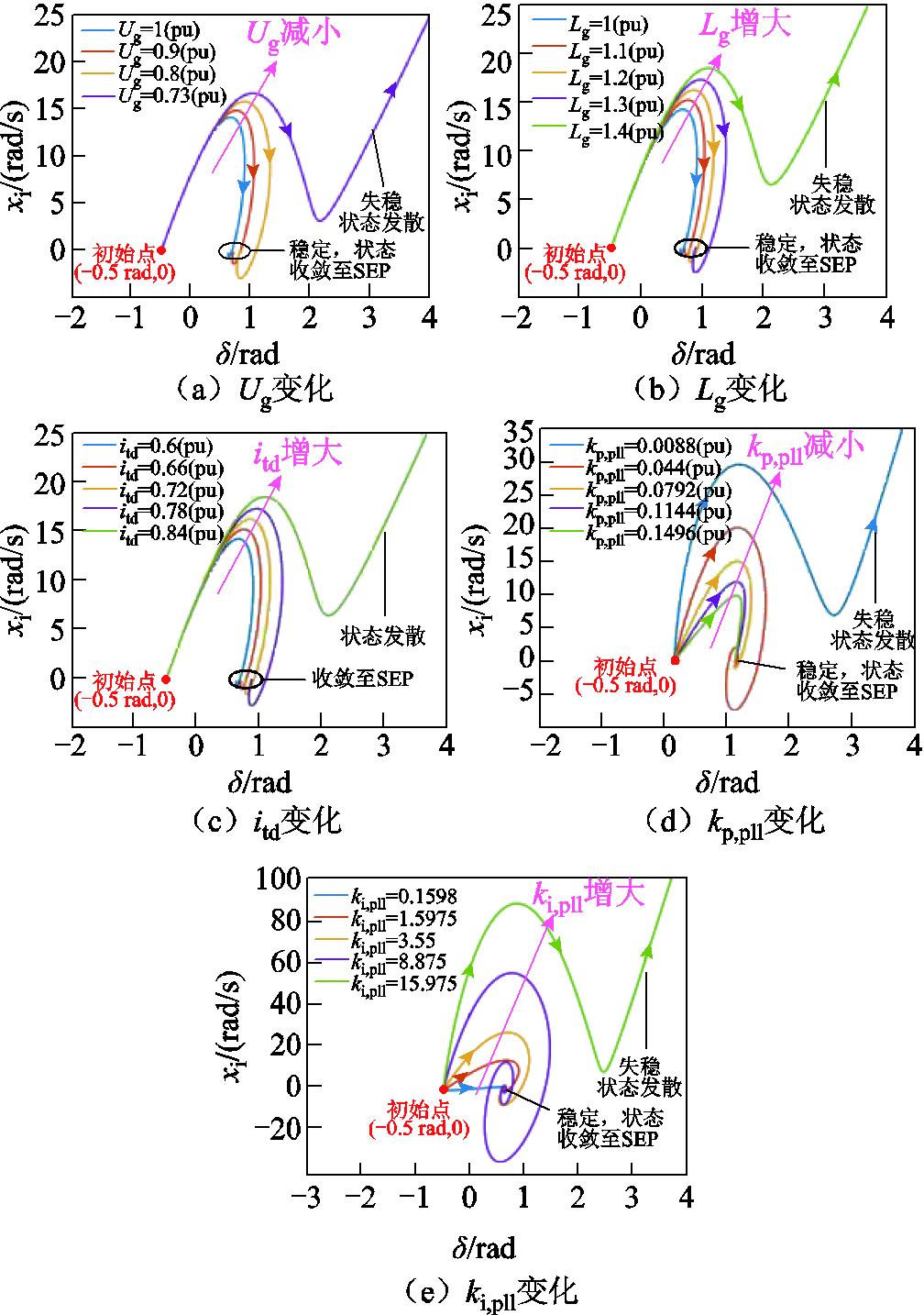
图6 不同电网参数及控制参数下系统的相轨迹
Fig.6 Phase portraits of GFLI under different parameters
根据2.3节分析可知,通过优化参数可在一定程度上提升GFLI并网系统的同步稳定性,但出于动态响应限制、电网运行条件约束等原因,稳定性提升能力存在限制。由式(12)可知,因系统PLL存在正反馈项Lgitd,在暂态过程中会使系统等效惯量Jeq和等效阻尼Deq减小,降低系统的同步稳定性。因此,可通过改进PLL技术来提升系统的同步稳定性。
本文通过在传统PLL中引入偏差频率反馈,在不增加额外成本的情况下实现系统同步稳定性的增强。所提的同步稳定控制策略结构及其等效框图如图7所示。该控制策略将锁相环角频率偏差Δωpll作为反馈PI控制器输入,以削弱电网的强感抗对GFLI并网系统稳定性的影响,提升逆变器阻尼系数,从而增强其同步稳定性。采用图7a所示改进PLL方法后,图2所示系统等效模型变为图7b所示模型。
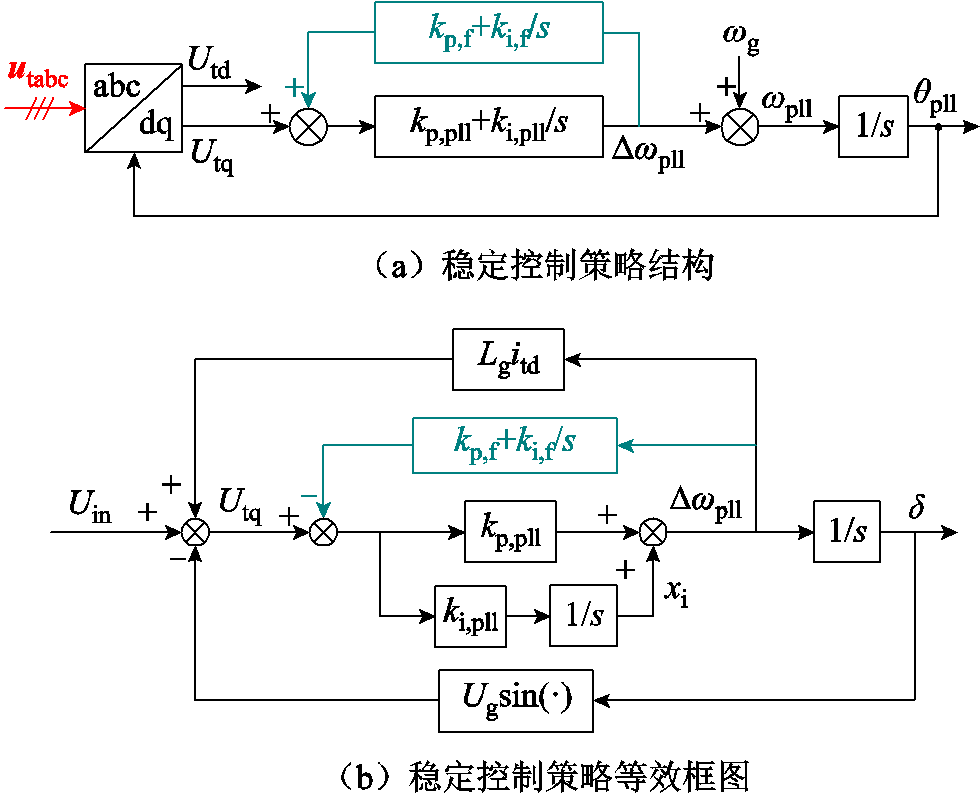
图7 稳定控制策略结构及其等效框图
Fig.7 Structure and equivalent diagram of the stability control strategy
加入所提稳定控制策略后的系统状态方程为
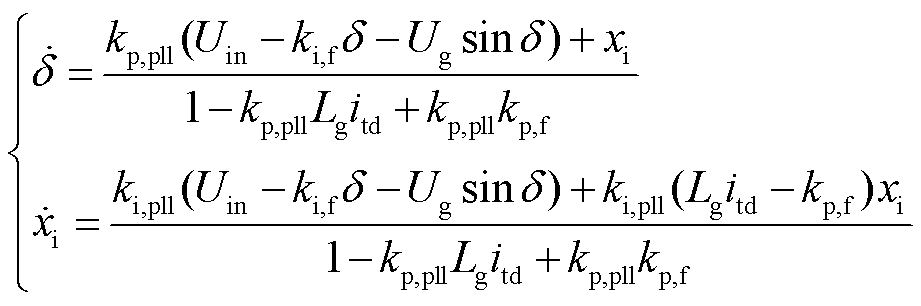 (14)
(14)
式中, 和
和 分别为引入偏差频率反馈控制器的比例和积分系数。
分别为引入偏差频率反馈控制器的比例和积分系数。
3.2.1 系统稳态平衡点分析
首先对系统平衡点进行分析。式(14)存在SEP的条件为
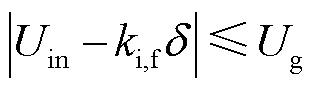 (15)
(15)
由式(15)可知,通过合理设置ki,f,式(14)必定存在稳态平衡点。
图8为采用所提稳定控制策略前后系统平衡点的分布。由图8可得,在相同条件下,加入稳定控制策略后系统SEP( , 0)和UEP(
, 0)和UEP( , 0)间的相位差
, 0)间的相位差 增大,即系统具有更高的稳定度。
增大,即系统具有更高的稳定度。
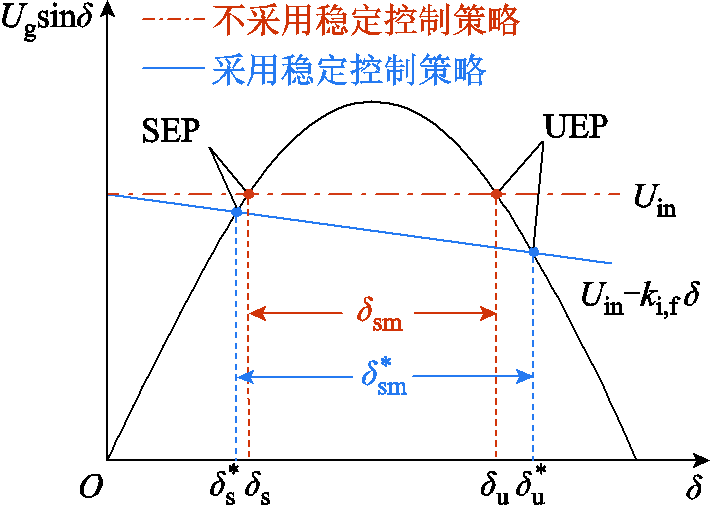
图8 采用稳定控制策略前后系统平衡点分布
Fig.8 System equilibrium distributions before and after adopting stability control strategy
为了分析系统在新SEP处的稳定性,在SEP( , 0)处建立系统的小信号模型。定义小信号变量为
, 0)处建立系统的小信号模型。定义小信号变量为
 (16)
(16)
联立式(14)和式(16)可得式(17)所示的系统小信号模型。
 (17)
(17)
式中,a=1-kp,pllLgitd+kp,pllkp,f,b=-kp,pll(Ugcos +ki,f),c=-kp,pll(Ugcos+ki,f),d=ki,pll(Lgitd-kp,f)。
+ki,f),c=-kp,pll(Ugcos+ki,f),d=ki,pll(Lgitd-kp,f)。
由2.1节分析可得,为保证系统在SEP(, 0)处的稳定性,需满足
 (18)
(18)
 (19)
(19)
 (20)
(20)
对比采用所提稳定控制前后系统的小信号稳定条件,采用所提控制策略不仅提升了系统的小信号稳定裕度,且Ug、Lg、itd允许的波动范围扩大,表明GFLI并网系统的同步稳定性得到了增强。
3.2.2 系统惯量阻尼特性分析
采用所提稳定控制策略后,式(11)转换为
 (21)
(21)
其中
 (22)
(22)
式中, 、
、 和
和 分别为采用改进PLL后系统的等效转动惯量、等效阻尼和等效电磁功率。
分别为采用改进PLL后系统的等效转动惯量、等效阻尼和等效电磁功率。
对比式(12)和式(22)可知,所提稳定控制策略通过将角速度差Δωpll和相位差δ反馈至PLL输入端,增大了系统的等效转动惯量和阻尼,提升了系统在暂态过程中的同步稳定性。
根据式(22),反馈控制器的比例系数kp,f主要通过增强系统阻尼提升系统稳定性,增大kp,f意味着系统稳定性增强。然而,系统阻尼过大会导致系统调节时间增加,系统受扰后难以快速恢复稳定,故kp,f不宜过大。考虑到1 kp,pllLgitd-kp,pllkp,f,Ugcosδki,f,Ugsinδki,fδ,且δ通常较小,因此,式(22)可近似等效为
kp,pllLgitd-kp,pllkp,f,Ugcosδki,f,Ugsinδki,fδ,且δ通常较小,因此,式(22)可近似等效为
 (23)
(23)
将式(23)代入式(21),进行拉普拉斯变换并整理可得
 (24)
(24)
式(24)所示系统的传递函数为一个标准的二阶传递函数,可按标准二阶系统参数设计方法对kp,f进行设计。
令 ,
, ,其中ωn为自然谐振频率,
,其中ωn为自然谐振频率, 为阻尼系数。为使系统具有较好的响应,一般可设为
为阻尼系数。为使系统具有较好的响应,一般可设为
 (25)
(25)
联立式(23)和式(25)可得
 (26)
(26)
在暂态过程中,电网电压幅值Ug可能大幅波动,因此在设计参数时还需考虑Ug波动对 的影响。本文取Ug波动范围为0.2(pu)~1(pu)[31]。
的影响。本文取Ug波动范围为0.2(pu)~1(pu)[31]。
综上所述,结合系统参数取值即可得到kp,f的取值范围。
根据式(3),GFLI稳态时q轴电压
 。而采用稳定控制策略后,由式(14)可知系统稳态时的q轴电压变为
。而采用稳定控制策略后,由式(14)可知系统稳态时的q轴电压变为
 ,即稳定控制器的积分环节使得系统q轴电压不为0,且反馈积分系数ki,f决定了稳态时系统的q轴电压大小。为了给电网提供足够多的有功功率支撑,同时使并网系统具有较高的功率因数,需要对ki,f引入的无功电压进行限制,本文取该值为10%Un。同时,当δ超过180°后,系统越过UEP进入不稳定区域。因此,本文采用最大允许相位差π来计算ki,f。综上所述,ki,f需满足
,即稳定控制器的积分环节使得系统q轴电压不为0,且反馈积分系数ki,f决定了稳态时系统的q轴电压大小。为了给电网提供足够多的有功功率支撑,同时使并网系统具有较高的功率因数,需要对ki,f引入的无功电压进行限制,本文取该值为10%Un。同时,当δ超过180°后,系统越过UEP进入不稳定区域。因此,本文采用最大允许相位差π来计算ki,f。综上所述,ki,f需满足
 (27)
(27)
根据上述设计准则,本文取kp,f =2,ki,f =20。
为了验证理论分析的正确性和所提控制策略的有效性,在Matlab/Simulink中搭建2 MW GFLI并网系统仿真模型。其系统结构如图1所示,系统参数见表1。系统初始状态设置为:电网电压Ug= 1(pu),电网电感Lg=1(pu),GFLI的参考电流itdref=0.6(pu)(1 420 A)、itqref=0。分别对三种典型电网故障工况进行仿真验证:①电网电压跌落;②电网阻抗跳变;③电网相位跳变。为满足分布式电源的并网技术要求[31],同时充分展示系统故障后的运行状态,将故障后的仿真时长设置为3 s。
图9为电网电压Ug在t=3 s时跌落至0.63(pu),采用传统PLL的GFLI仿真结果。电网电压跌落后,由于Uin-Ugsinδ瞬间增大,使得Δωpll增大,进而使δ逐渐增大,与图5a中δ的运动轨迹相符。当δ越过UEP后系统进入不稳定区域,GFLI失稳,电压电流振荡。
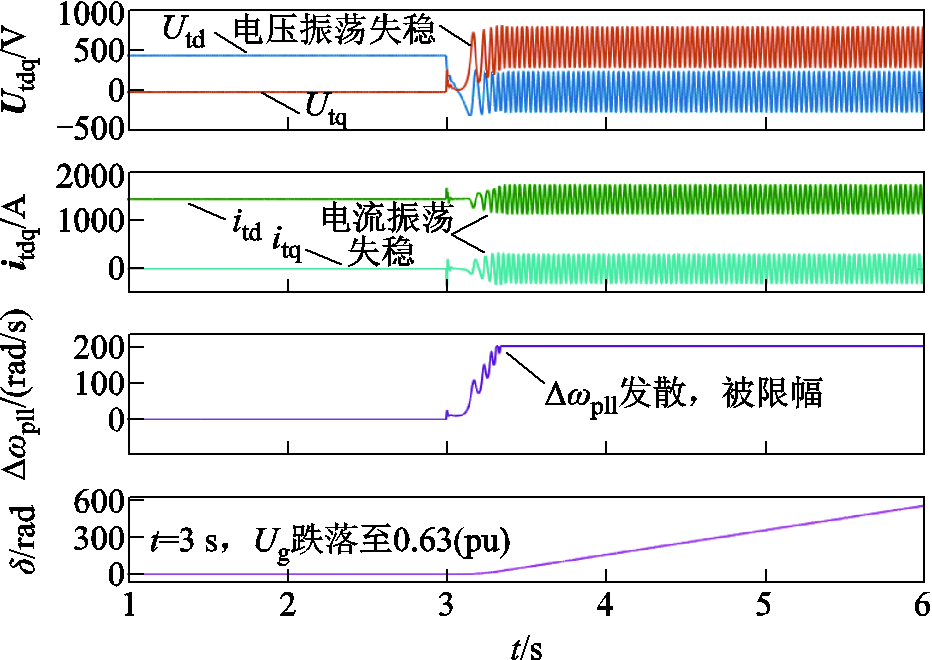
图9 Ug跌落时采用传统PLL的GFLI仿真结果
Fig.9 Simulation results of GFLI with traditional PLL under grid voltage drops
图10a为采用所提稳定控制策略后Ug跌落至0.63(pu)时的系统仿真结果。由图10a可知,所提控制策略提高了GFLI阻尼,减缓了电网电压跌落后Δωpll的上升速度,从而减小了δ的变化幅度,使其不超过UEP,因此GFLI在电网电压跌落后仍保持稳定,并最终与电网恢复同步。图10b为采用所提控制策略后Ug跌落至0.58(pu)时的系统仿真结果。由图10b可知,该暂态事件下系统仍可保持稳定运行,说明所提控制策略提升了电网电压的最大允许跌落深度,意味着系统同步稳定性得到了提升,验证了电网电压跌落故障下所提方法的有效性。
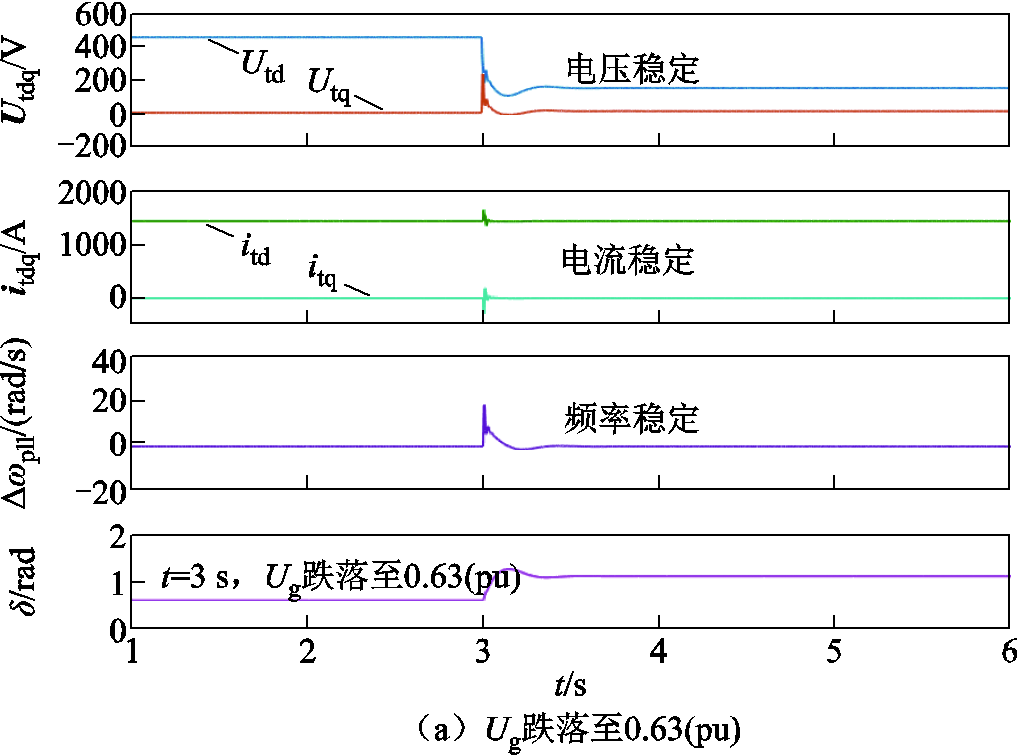
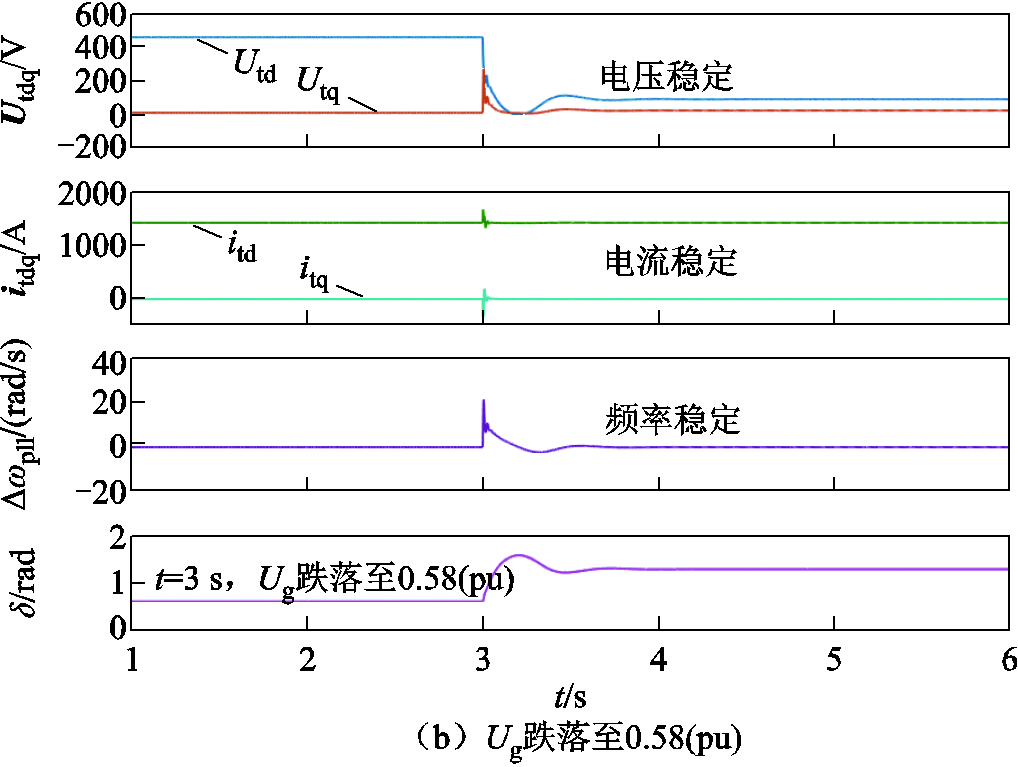
图10 Ug跌落采用所提稳定控制策略的GFLI仿真结果
Fig.10 Simulation results of GFLI with the proposed stability control strategy under grid voltage drops
图11为电网电感Lg在t=3 s时跳变至1.58(pu),采用传统PLL的GFLI仿真结果。电网电感跳变后,由于Uin-Ugsinδ瞬间增大,使得Δωpll增大,进而使δ增大。当δ越过UEP后系统进入不稳定区域,GFLI失稳,电压电流振荡。
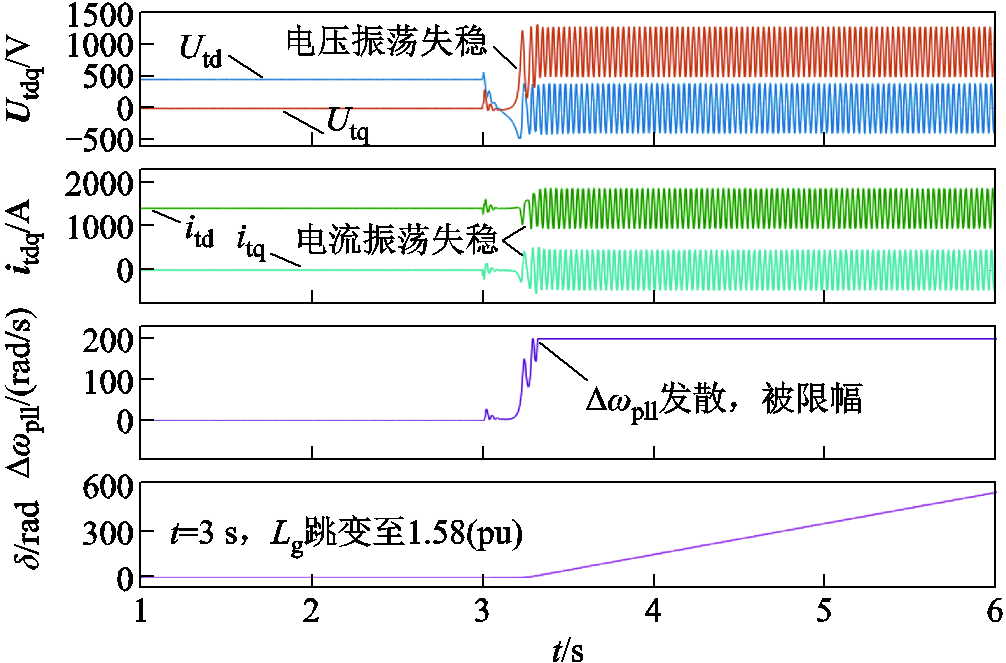
图11 Lg跳变时采用传统PLL的GFLI仿真结果
Fig.11 Simulation results of GFLI with traditional PLL under grid impedance steps
图12a为采用所提稳定控制策略后Lg跳变至1.58(pu)时的系统仿真结果。由图12a可知,采用所提控制策略后,GFLI保持稳定,并最终恢复与电网同步。图12b为Lg跳变至1.68(pu)时的系统仿真结果。由图12b可知,Lg进一步跳变时系统仍可保持稳定运行,说明所提控制策略增大了电网阻抗的可变范围,意味着系统同步稳定性得到了提升,验证了电网阻抗跳变故障下所提方法的有效性。
图13为电网相位θg在t=3 s时跳变190°,采用传统PLL的GFLI仿真结果。电网相位跳变后,由于PLL相位θpll滞后,θpll将加速,以实现与电网相位θg同步,在此过程中Δωpll增大,从而使δ逐
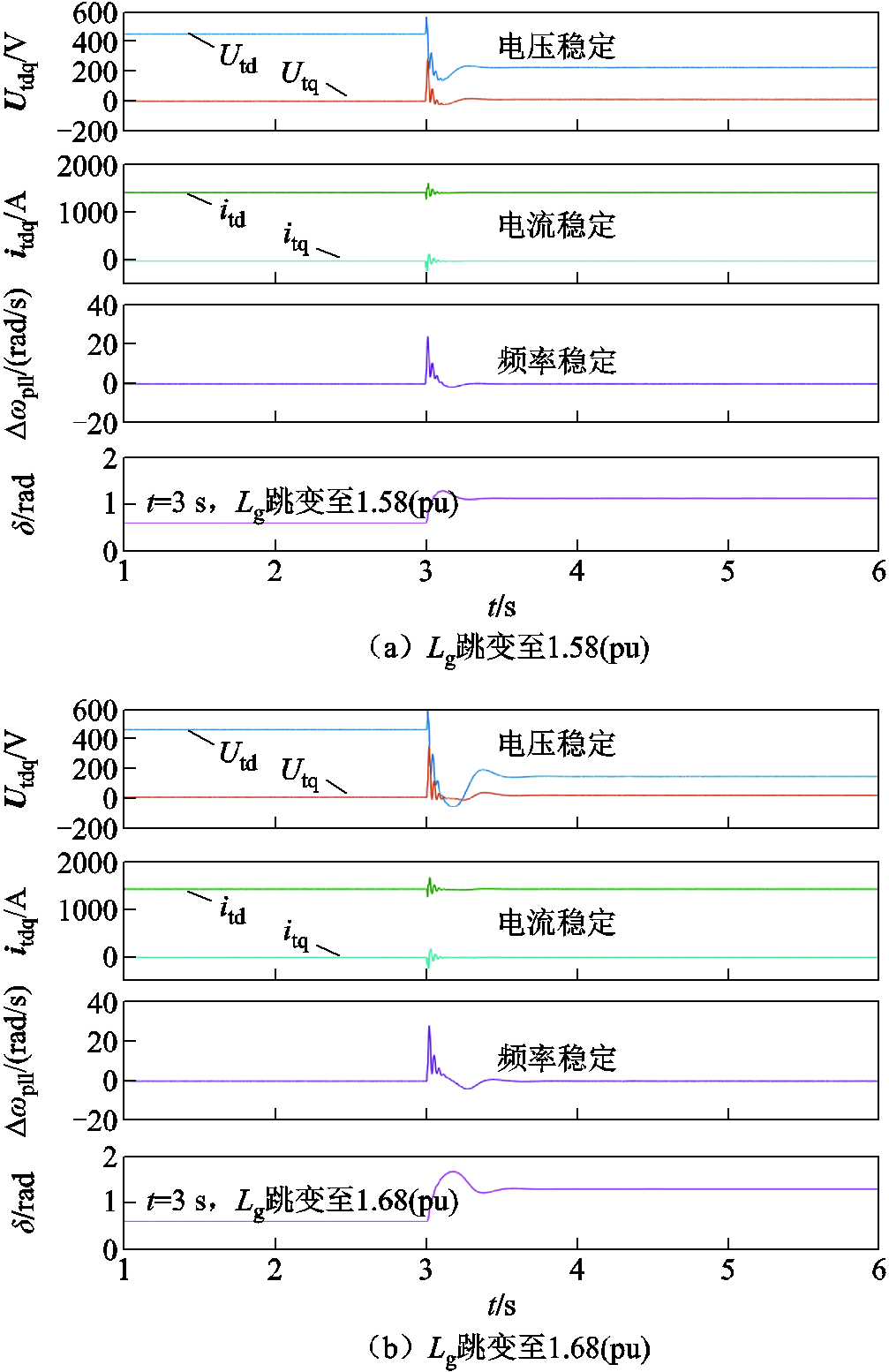
图12 Lg跳变时采用所提控制策略的GFLI仿真结果
Fig.12 Simulation results of GFLI with the proposed stability control strategy under grid impedance steps
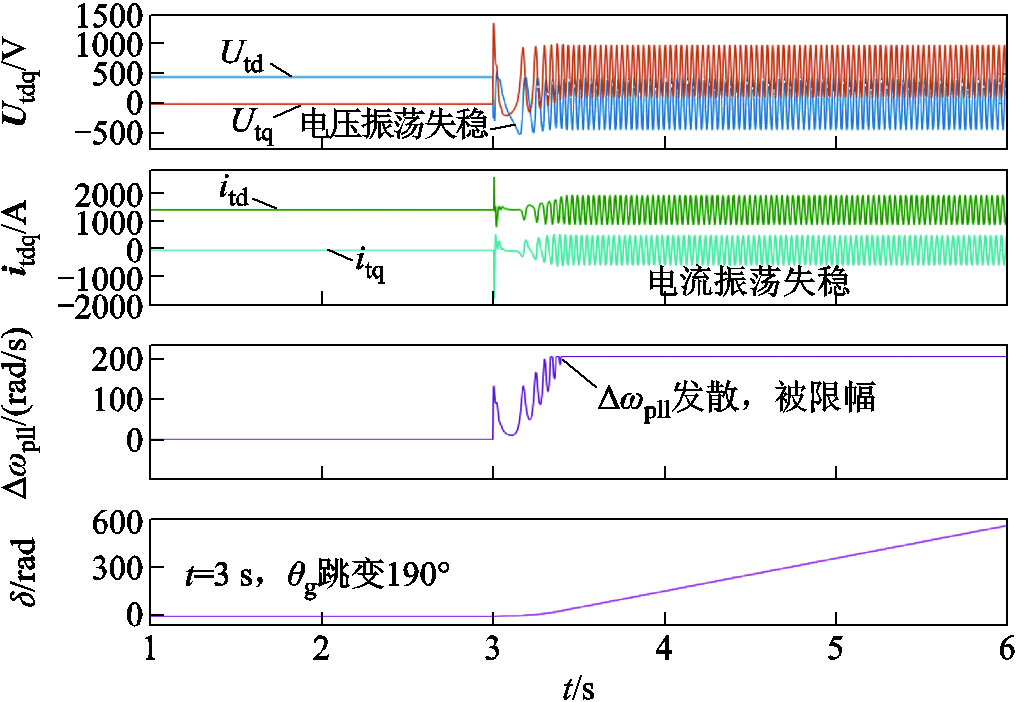
图13 θg跳变时采用传统PLL的GFLI仿真结果
Fig.13 Simulation results of GFLI with traditional PLL under grid phase steps
图14a为采用所提稳定控制策略后θg跳变190°时的系统仿真结果。由图14a可知,采用所提控制策略后,GFLI保持稳定,并最终与电网恢复同步。图14b为采用所提控制策略后θg跳变200°时的系统仿真结果,由图14b可知,当θg进一步跳变时系统仍可保持稳定运行,说明所提控制策略增大了电网相位的跳变范围,意味着系统同步稳定性得到了提升,验证了电网相位跳变故障下所提方法的有效性。
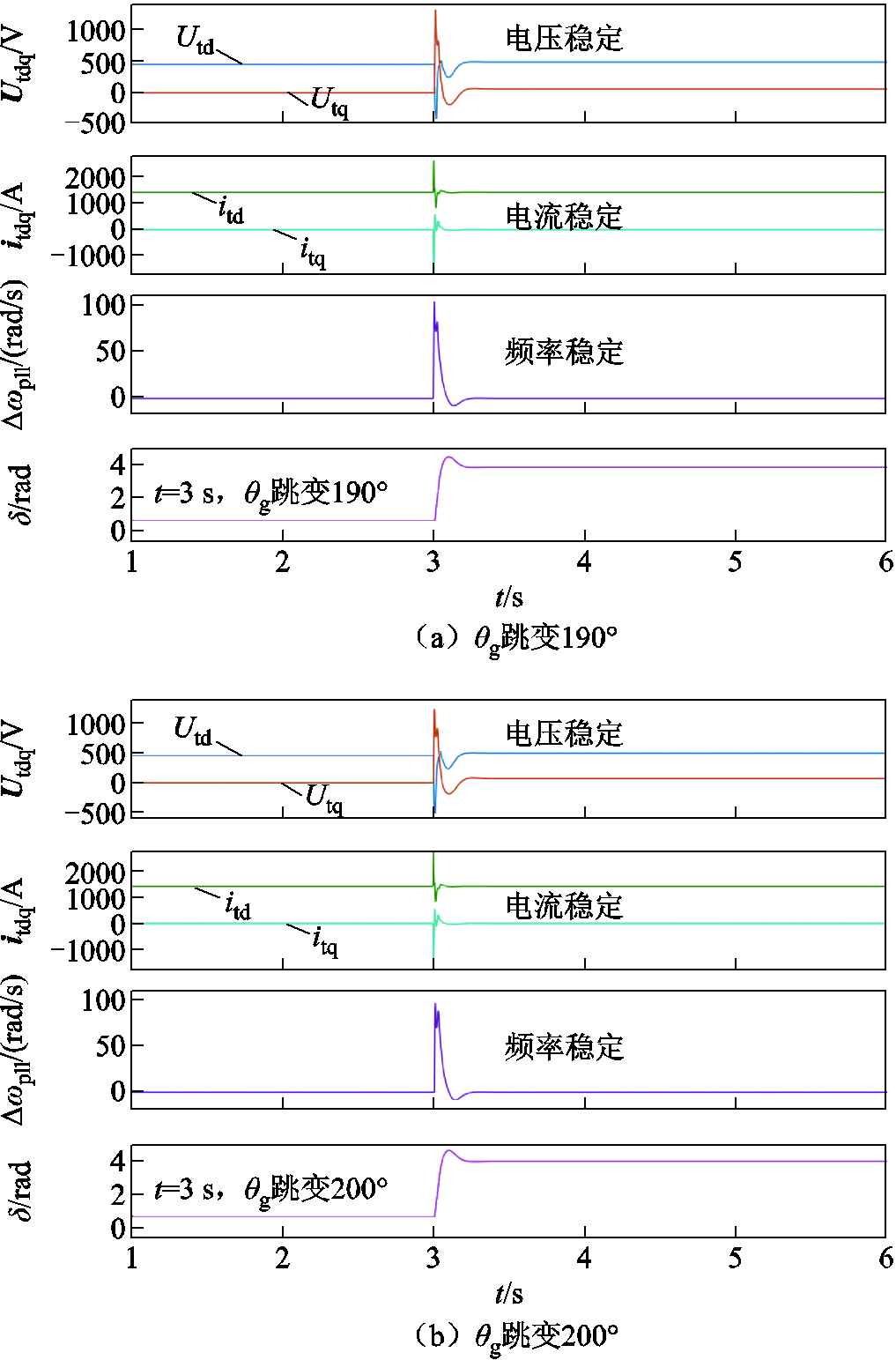
图14 θg跳变时采用所提控制策略的GFLI仿真结果
Fig.14 Simulation results of GFLI with the proposed stability control strategy under grid phase steps
为进一步验证所提稳定控制策略的有效性,基于Typhoon HIL 602搭建了2 MW GFLI并网系统硬件在环实时仿真实验平台进行实验验证,实验参数与仿真参数一致。实验平台如图15所示,主电路搭建在Typhoon HIL 602中,控制算法搭建在以TMS320F28335 DSP芯片为核心的控制器中。为满足分布式电源的并网技术要求[31],同时充分展示系统故障后的运行状态,将故障后的实验时长设置为900 ms。
图16为采用传统PLL的GFLI并网系统在电网电压Ug跌落至0.63(pu)时的实验结果。由图16可知,GFLI的输出电压和电流在Ug跌落后开始振荡,系统失稳。

图15 硬件在环实验平台
Fig.15 HIL experimental platform
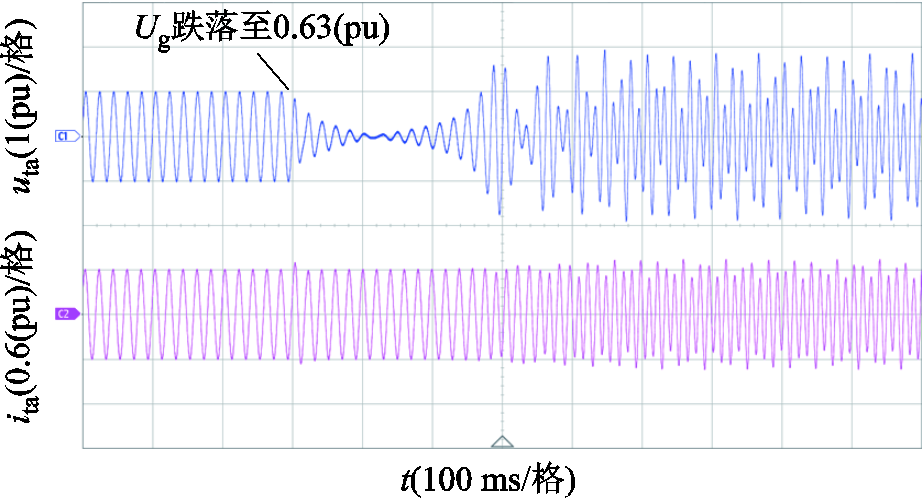
图16 Ug跌落时采用传统PLL的GFLI实验结果
Fig.16 Experimental results of GFLI with traditional PLL under grid voltage drops
图17为采用所提稳定控制策略后GFLI在电网电压Ug分别跌落至0.63(pu)与0.58(pu)时的实验结果。结果显示,GFLI在电网电压Ug跌落至0.63(pu)和0.58(pu)后,系统仍能保持稳定运行,硬件在环实验结果验证了所提稳定控制策略在电网电压跌落故障下的有效性。
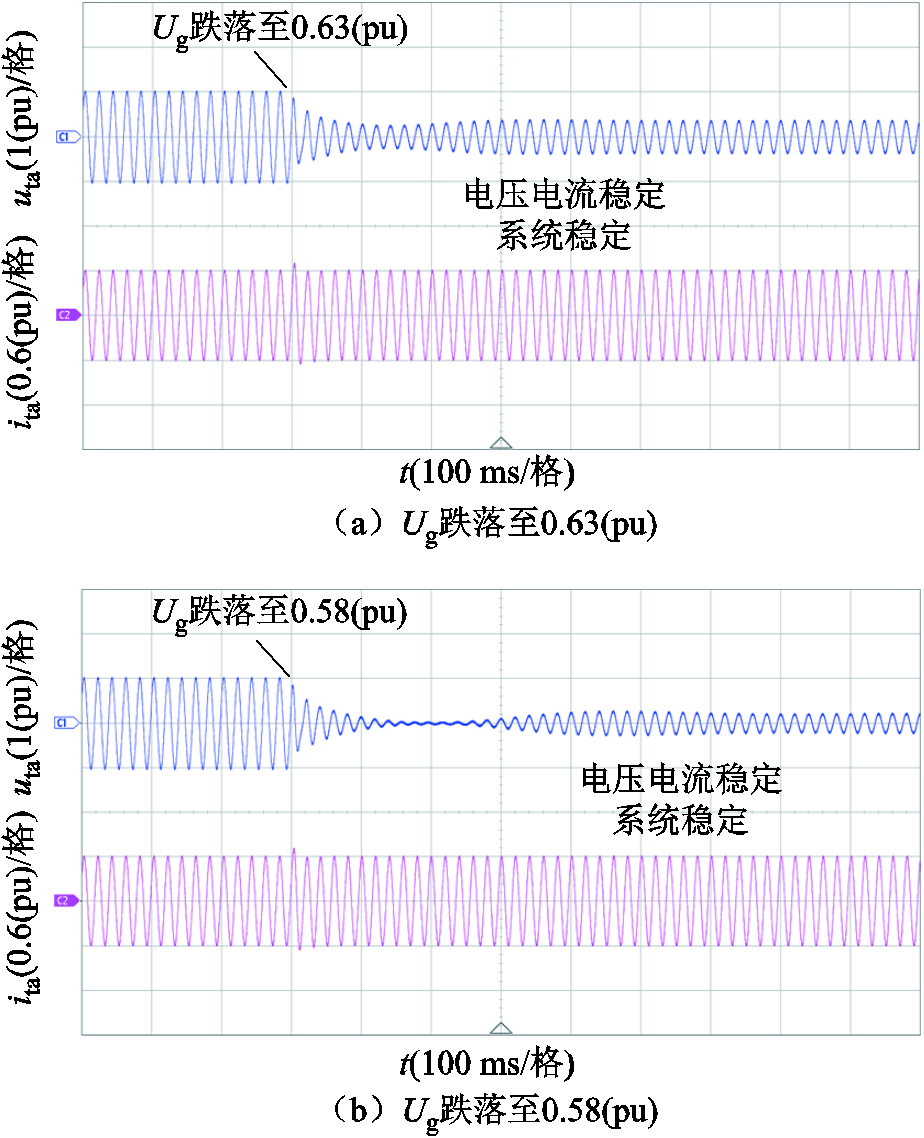
图17 Ug跌落时采用所提控制策略的GFLI实验结果
Fig.17 Experimental results of GFLI with the proposed stability control strategy under grid voltage drops
图18为采用传统PLL的GFLI在电网电感Lg由1(pu)跳变至1.58(pu)时的实验结果。由图18可知,GFLI的输出电压和电流在Lg跳变后开始振荡,系统失稳。
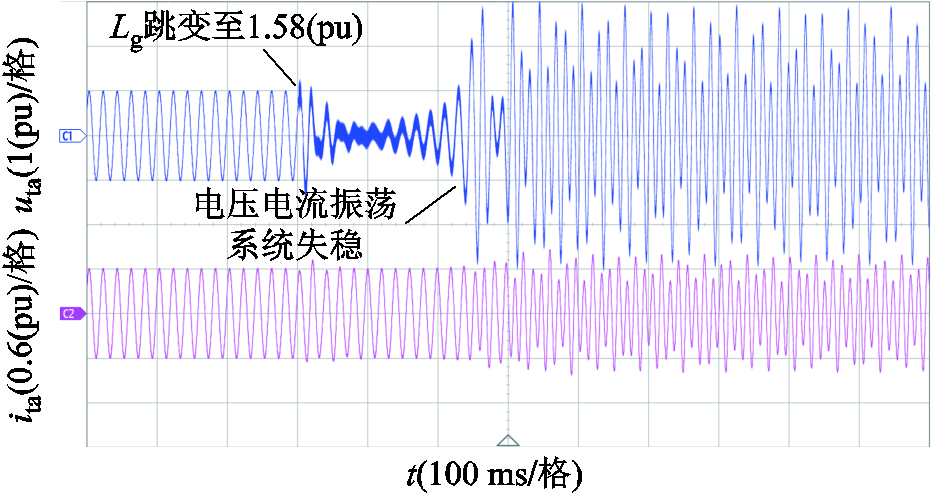
图18 Lg跳变时采用传统PLL的GFLI实验结果
Fig.18 Experimental results of GFLI with traditional PLL under grid impedance steps
图19为采用所提稳定控制策略后GFLI并网系统在电网电感Lg分别跳变至1.58(pu)与1.68(pu)时的实验结果。由图19可知,GFLI在电网电感Lg跳变至1.58(pu)和1.68(pu)后,系统仍能保持稳定运行,说明所提稳定控制策略增大了电网阻抗的可变范围,增强了GFLI并网系统的同步稳定性。硬件
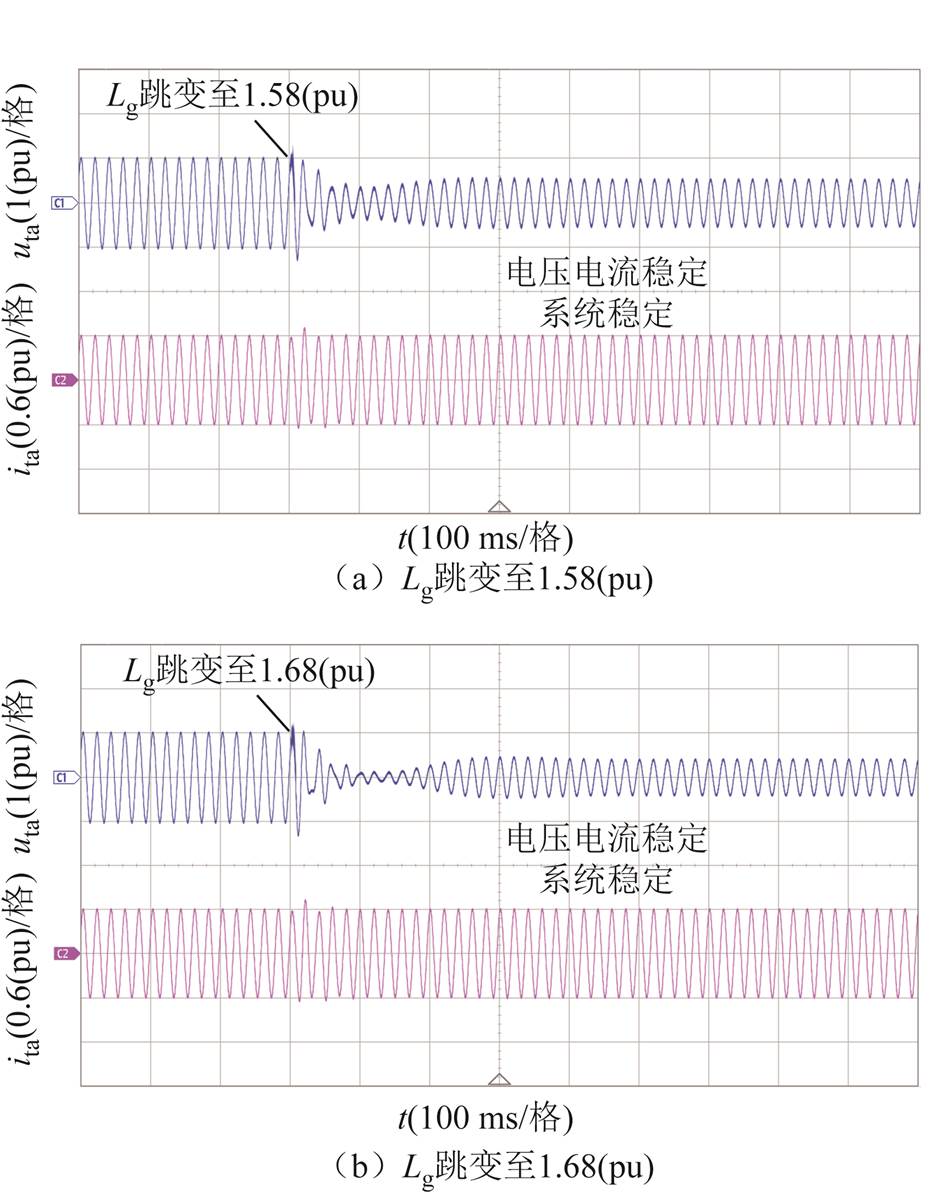
图19 Lg跳变时采用所提控制策略的GFLI实验结果
Fig.19 Experimental results of GFLI with the proposed stability control strategy under grid impedance steps
在环实验结果验证了所提稳定控制策略在电网阻抗跳变故障下的有效性。
图20为采用传统PLL时GFLI在电网相位θg跳变190°时的实验结果。由图20可知,GFLI的输出电压和电流在θg跳变后开始振荡,系统失稳。
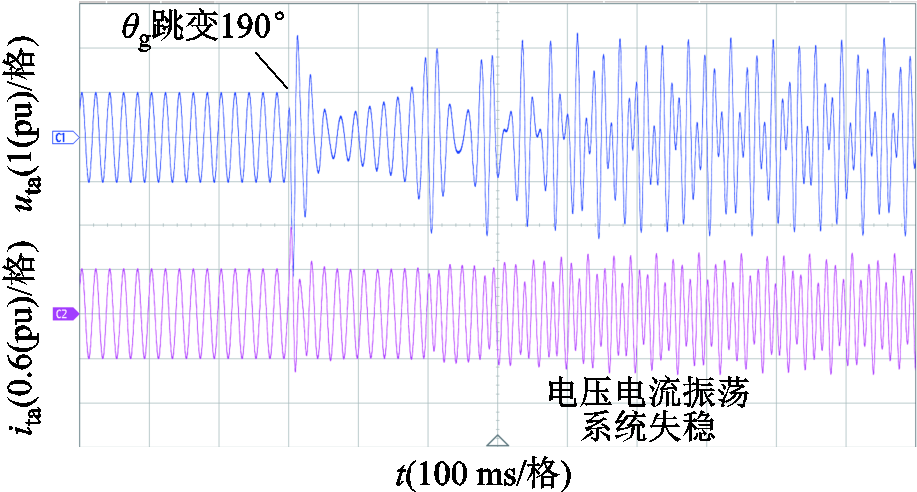
图20 θg跳变时采用传统PLL的GFLI实验结果
Fig.20 Experimental results of GFLI with traditional PLL under grid phase steps
图21为采用所提稳定控制策略后GFLI并网系统在电网相位θg分别跳变190°与200°时的实验结果。结果显示,GFLI并网系统在经历电网相位θg跳变190°和200°后,仍能保持稳定运行,说明所提稳定控制策略增大了电网相位的可变范围,从而增强了GFLI并网系统的同步稳定性。硬件在环实验结果验证了所提稳定控制策略在电网相位跳变故障下的有效性。
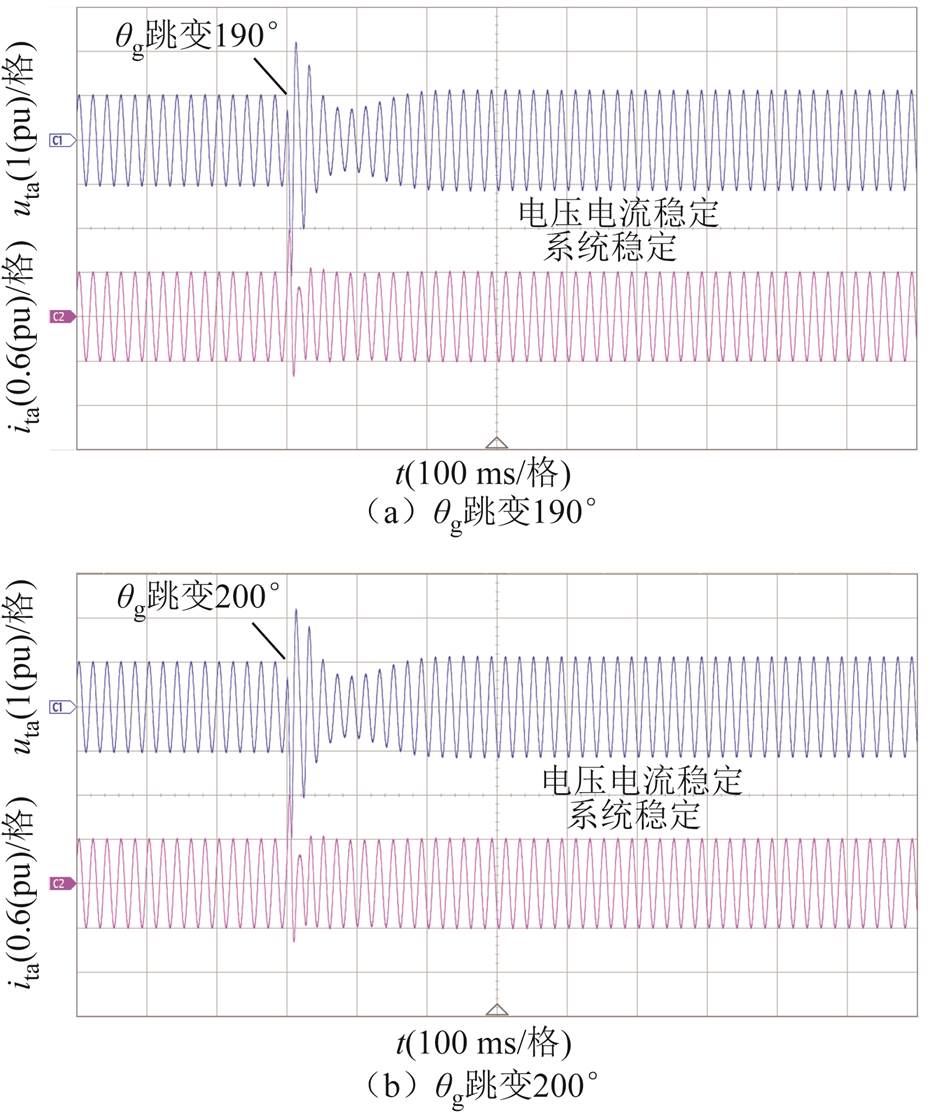
图21 θg跳变时采用所提控制策略的GFLI实验结果
Fig.21 Experimental results of GFLI with the proposed stability control strategy under grid phase steps
本文针对GFLI并网系统的同步稳定性问题进行了研究,对系统稳态平衡点、电网故障后系统的同步机理与系统惯量阻尼特性进行了分析,揭示了系统参数对GFLI同步稳定性的影响机理,提出了一种基于改进锁相技术的同步稳定性提升控制方法,通过仿真与实验验证了所提方法的有效性。通过论文研究,可形成如下结论:
1)GFLI在电网故障等暂态事件下能够保持稳定的必要条件为系统故障后存在SEP,且SEP需满足小信号稳定条件。
2)电网电压跌落越小,或电网电感、锁相环积分系数、系统有功电流越小,系统阻尼越大,稳定性越强。GFLI锁相环比例系数对系统稳定性则有双重影响,在一定范围内,比例系数越大,GFLI阻尼越大,系统越稳定;但当其过大时,会使暂态过程中GFLI角频率过大,降低其同步稳定性,甚至使系统因不满足小信号稳定条件而失稳。
3)所提改进PLL不仅可增强GFLI的小信号稳定裕度,而且可提升GFLI的惯量和阻尼系数,进而提升其同步稳定性。
参考文献
[1] 曾祥辰, 刘青, 王嘉晨, 等. 弱电网下并网逆变器恒定带宽及稳定裕度的自适应控制策略[J]. 电工技术学报, 2024, 39(9): 2682-2695. Zeng Xiangchen, Liu Qing, Wang Jiachen, et al. Adaptive control strategy of grid-connected inverters with constant bandwidth and stability margin in weak grids[J]. Transactions of China Electrotechnical Society, 2024, 39(9): 2682-2695.
[2] Zhou Weihua, Mohammed N, Bahrani B. Comprehensive modeling, analysis, and comparison of state-space and admittance models of PLL-based grid-following inverters considering different outer control modes[J]. IEEE Access, 2022, 10: 30109-30146.
[3] 李红, 梁军杨, 王振民, 等. 跟网型变换器的小扰动同步稳定机理分析与致稳控制[J]. 电工技术学报, 2024, 39(12): 3802-3815. Li Hong, Liang Junyang, Wang Zhenmin, et al. Small signal synchronization stability analysis and improved control strategy for grid following converter[J]. Transactions of China Electrotechnical Society, 2024, 39(12): 3802-3815.
[4] Zhao Jiantao, Huang Meng, Zha Xiaoming. Nonlinear analysis of PLL damping characteristics in weak-grid-tied inverters[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2020, 67(11): 2752-2756.
[5] 刘昊, 方天治, 张惠丽, 等. 弱电网下应对复杂稳定性问题的并网逆变器改进电压前馈通路研究[J]. 电工技术学报, 2024, 39(16): 4955-4967. Liu Hao, Fang Tianzhi, Zhang Huili, et al. Research on an improved voltage feedforward path of grid-connected inverter coping with complex stability issues in weak grid[J]. Transactions of China Electrotechnical Society, 2024, 39(16): 4955-4967.
[6] 张占俊, 李建文, 董耀, 等. 弱电网下多逆变器并网谐振失稳分析方法[J]. 电气技术, 2020, 21(10): 21-28. Zhang Zhanjun, Li Jianwen, Dong Yao, et al. Method of resonance instability analysis of multiple grid-connected inverters in weak grid[J]. Electrical Engineering, 2020, 21(10): 21-28.
[7] He Xiuqiang, Geng Hua, Xi Jiangbei, et al. Resynchronization analysis and improvement of grid-connected VSCs during grid faults[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(1): 438-450.
[8] 李鹏飞, 李霞林, 王成山, 等. 中低压柔性直流配电系统稳定性分析模型与机理研究综述[J]. 电力自动化设备, 2021, 41(5): 3-21. Li Pengfei, Li Xialin, Wang Chengshan, et al. Review of stability analysis model and mechanism research of medium- and low-voltage flexible DC distribution system[J]. Electric Power Automation Equipment, 2021, 41(5): 3-21.
[9] Zhao Jiantao, Huang Meng, Zha Xiaoming. Nonlinear analysis of PLL damping characteristics in weak-grid-tied inverters[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2020, 67(11): 2752-2756.
[10] 胡祺, 付立军, 马凡, 等. 弱电网下基于锁相控制并网变换器小扰动同步稳定分析[J]. 中国电机工程学报, 2021, 41(1): 98-108, 401. Hu Qi, Fu Lijun, Ma Fan, et al. Small signal synchronizing stability analysis of PLL-based VSC connected to weak AC grid[J]. Proceedings of the CSEE, 2021, 41(1): 98-108, 401.
[11] 梁军杨, 李红, 宋国杰, 等. 多时间尺度控制下跟网型变换器的同步稳定性分析与改进控制[J]. 电工技术学报, 2024, 39(22): 7182-7196. Liang Junyang, Li Hong, Song Guojie, et al. Synchronization stability analysis and enhanced control of grid-following converters under multi-timescale control[J]. Transactions of China Electro-technical Society, 2024, 39(22): 7182-7196.
[12] 张梓钦, 朱东海, 马玉梅, 等. 弱电网故障下新能源并网变换器的奇异摄动模型与暂态稳定性分析[J]. 中国电机工程学报, 2023, 43(2): 454-466. Zhang Ziqin, Zhu Donghai, Ma Yumei, et al. Singular perturbation model and transient stability analysis of grid-connected converter under weak grid faults[J]. Proceedings of the CSEE, 2023, 43(2): 454-466.
[13] Xu Jinming, Ling Zihan, Luo Yunhu, et al. Synchronization stability analysis and parameter design of grid-following inverters considering the interactions of current control and phase-locked loop[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2024, 12(5): 5013-5027.
[14] Wu Chao, Lyu Yashi, Wang Yong, et al. Transient synchronization stability analysis of grid-following converter considering the coupling effect of current loop and phase locked loop[J]. IEEE Transactions on Energy Conversion, 2024, 39(1): 544-554.
[15] 李霞林, 王智, 郭力, 等. 基于最大估计吸引域的VSC接入弱网下的锁相环同步暂态稳定性分析[J]. 中国电机工程学报, 2022, 42(20): 7485-7497. Li Xialin, Wang Zhi, Guo Li, et al. Transient stability analysis of PLL synchronization in weak-grid-connected VSCs based on the largest estimated domain of attraction[J]. Proceedings of the CSEE, 2022, 42(20): 7485-7497.
[16] Lin Jianheng, Su Mei, Sun Yao, et al. Frequency coupling suppression control strategy for single-phase grid-tied inverters in weak grid[J]. IEEE Transactions on Industrial Electronics, 2022, 69(9): 8926-8938.
[17] 黄萌, 舒思睿, 李锡林, 等. 面向同步稳定性的电力电子并网变流器分析与控制研究综述[J]. 电工技术学报, 2024, 39(19): 5978-5994. Huang Meng, Shu Sirui, Li Xilin, et al. A review of synchronization-stability-oriented analysis and control of power electronic grid-connected converters[J]. Transactions of China Electrotechnical Society, 2024, 39(19): 5978-5994.
[18] Wu Heng, Wang Xiongfei. Design-oriented transient stability analysis of PLL-synchronized voltage-source converters[J]. IEEE Transactions on Power Electronics, 2020, 35(4): 3573-3589.
[19] Taul M G, Wang Xiongfei, Davari P, et al. An efficient reduced-order model for studying synchronization stability of grid-following converters during grid faults[C]//2019 20th Workshop on Control and Modeling for Power Electronics (COMPEL), Toronto, ON, Canada, 2019: 1-7.
[20] 张宇, 张琛, 蔡旭, 等. 并网变换器的暂态同步稳定性分析: 稳定域估计与镇定控制[J]. 中国电机工程学报, 2022, 42(21): 7871-7884. Zhang Yu, Zhang Chen, Cai Xu, et al. Transient grid-synchronization stability analysis of grid-tied voltage source converters: stability region estimation and stabilization control[J]. Proceedings of the CSEE, 2022, 42(21): 7871-7884.
[21] Liu C C, Yang Jingxi, Tse C K, et al. Transient synchronization stability of grid-following converters considering nonideal current loop[J]. IEEE Transactions on Power Electronics, 2023, 38(11): 13757-13769.
[22] Yang Jingxi, Tse C K, Huang Meng, et al. Comparison of homoclinic bifurcations between grid-following and grid-forming converters[J]. IEEE Transactions on Industrial Electronics, 2024, 71(5): 4731-4741.
[23] 王继磊, 张兴, 韩峰, 等. 并网逆变器LVRT同步稳定性分析及其优化策略[J]. 太阳能学报, 2024, 45(2): 309-317. Wang Jilei, Zhang Xing, Han Feng, et al. Synchronous stability analysis and optimization strategy of LVRT for grid-connected inverter[J]. Acta Energiae Solaris Sinica, 2024, 45(2): 309-317.
[24] Mansour M Z, Ravanji M H, Karimi A, et al. Small-signal synchronization stability enhancement of grid-following inverters via a feedback linearization controller[J]. IEEE Transactions on Power Delivery, 2022, 37(5): 4335-4344.
[25] Yang Huoming, Eggers M, Teske P, et al. Comparative stability analysis and improvement of grid-following converters using novel interpretation of linear time-periodic theory[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2022, 10(6): 7049-7061.
[26] Lu Shaoqi, Xu Zheng, Xiao Liang, et al. Evaluation and enhancement of control strategies for VSC stations under weak grid strengths[J]. IEEE Transactions on Power Systems, 2018, 33(2): 1836-1847.
[27] 杨明, 杨倬, 李玉龙, 等. 高渗透率下基于并网逆变器阻抗重塑的锁相环设计方法[J]. 电工技术学报, 2024, 39(2): 554-566. Yang Ming, Yang Zhuo, Li Yulong, et al. A phase-locked loop design method based on impedance remodeling of grid-connected inverter under high permeability[J]. Transactions of China Electrotechnical Society, 2024, 39(2): 554-566.
[28] 于彦雪, 马慧敏, 陈晓光, 等. 弱电网下基于准静态模型的混合控制微电网逆变器同步稳定性研究[J]. 电工技术学报, 2022, 37(1): 152-164. Yu Yanxue, Ma Huimin, Chen Xiaoguang, et al. Synchronous stability research of inverters in hybrid microgrid based on the quasi-static models under weak grid[J]. Transactions of China Electrotechnical Society, 2022, 37(1): 152-164.
[29] 宋永端. 自动控制原理-下[M]. 北京: 机械工业出版社, 2020.
[30] Zhao Jiantao, Huang Meng, Yan Han, et al. Nonlinear and transient stability analysis of phase-locked loops in grid-connected converters[J]. IEEE Transactions on Power Electronics, 2021, 36(1): 1018-1029.
[31] 国家质量监督检验检疫总局, 中国国家标准化管理委员会. 分布式电源并网技术要求: GB/T 33593—2017[S]. 北京: 中国标准出版社, 2017.
Abstract Renewable energy resources (RESs) such as wind power and photovoltaic power have been developed rapidly and applicated in large scale in recent years. The phase-locked loop (PLL) based grid-following inverters (GFLIs) are widely used to connect RESs to the power system due to their advantages of high efficiency, flexibility and controllability. However, with the continuous increase in penetration of power electronic devices and RESs within the power system, GFLIs are prone to loss synchronous stability under transient events like grid voltage sage, grid short circuit and so on, resulting in disconnection of RESs and threatening the safe and stable operation of the power system. Therefore, it is crucial to study the stability issues of GFLIs under transient events. The analysis results reveal that the PLL poses a negative damping effect, which will decrease GFLI’s synchronous stability during transient events, especially under weak grid condition. To address this issue, a stability control method is proposed in this work to enhance GFLI’s synchronous stability during transient events in weak grid condition.
The basic idea of the proposed stability control method is to reduce the negative damping effect introduced by the PLL. Base on this, a feedback loop that uses the deviation of the angular speed between the PLL and the grid as feedback signal is added to the conventional PLL, thereby reducing the negative damping effect of the PLL. Theoretical analysis shows that the stability control method improves the small-signal stability margin of GFLI, increases the equivalent inertia and damping coefficient of GFLI, and thus enhances system’s synchronous stability. The parameter design principle of the stability control method is given with consideration of different grid conditions.
Simulation and hardware-in-the-loop (HIL) experiment results validate that the proposed stability control method can enhance the stability of GFLI under the conditions of grid voltage sag, sudden changes in grid impedance and grid phase. With the traditional PLL that doesn’t adopt the stability control method, the system losses synchronous stability when grid voltage drops from 1pu to 0.63(pu), grid impedance steps from 1(pu) to 1.58(pu) and grid phase steps 190°. On the contrary, with the stability control method, the GFLI grid-connected system can maintain stability when grid voltage drops to 0.58(pu), grid impedance steps to 1.68(pu) and grid phase steps 200°.
The following conclusions can be drawn through the research presented in this paper: (1) The necessary condition for GFLI grid-connected system to maintain stability during transient events lies in the existence of a post-fault steady-state equilibrium point (SEP), which must satisfy the small-signal stability criterion. (2) The smaller the voltage sage, grid inductance, PLL’s integral coefficient, and the system active current, the greater the system stability. PLL’s proportional coefficient poses dual effects on GFLI’s stability. Within a certain range, increased proportional coefficient can enhance system’s synchronous stability. However, excessive proportional coefficient will induce overspeed angular velocity in the GFLI, even make the system fail to meet the small-signal stability condition, thereby deteriorating system’s stability. (3) The proposed stability control method can not only enhance the small-signal stability margin of GFLI, but also strengthen synchronous stability.
keywords:Renewable energy power generation, grid-following inverter, phase-locked loop, synchronous stability, stability control
DOI: 10.19595/j.cnki.1000-6753.tces.250588
中图分类号:TM464
直流输电技术国家重点实验室开放基金资助项目(SKLHVDC-2023-KF-04)。
收稿日期 2025-04-11
改稿日期 2025-05-12
王鹏飞 男,1997年生,博士研究生,研究方向为新能源并网系统稳定性分析与控制。E-mail:20231301012@stu.cqu.edu.cn
陈家伟 男,1986年生,教授,博士生导师,研究方向为新能源发电与微电网、分布式发电系统功率控制与能量管理策略等。E-mail:echenjw@cqu.edu.cn(通信作者)
(编辑 赫 蕾)