图1 VSG拓扑结构
Fig.1 Structure of system containing VSG
摘要 基于虚拟同步发电机(VSG)的构网型控制技术可为新型电力系统提供较好的支撑作用,然而其主流控制策略在阻尼项设计上有多种形式,现有研究缺乏对不同形式阻尼项下换流器控制特性差异及阻尼作用机理进行分析。针对此问题,该文从变流器并网输出特性角度出发,系统性地揭示了不同阻尼控制下的阻尼作用机理与惯量-阻尼协同机制。首先,由功率传输方程推导了不同阻尼控制下含电网频率约束的VSG功率传递函数模型,以此得到不同控制方式的统一数学描述框架;其次,通过对各传递函数进行频域分析,探明了不同控制方式下阻尼系数、截止频率等关键参数在多工况下对功率输出特性及稳定性的影响规律;最后,通过实验样机测试系统验证了理论分析的正确性,并以此总结了各控制方式的优缺点及适用场景,为构网型控制策略的阻尼控制形式选型与参数整定提供了理论依据。
关键词:构网型控制 不同阻尼控制 阻尼作用机理 负荷扰动 并网特性
现有新能源并网装置大多基于跟网型控制接入电网[1-3]。由于可再生能源发电形式呈现高度间歇性、波动性及不确定性的特点,其大量接入时,电网将面临低惯量、弱支撑等挑战[4-5]。基于虚拟同步发电机(Virtual Synchronous Generator, VSG)控制技术[6-7]的构网型换流器对外呈现电压源特性,是解决上述问题的途径之一。现有研究主要针对VSG构网控制中的有功-频率与无功-电压控制环节,而阻尼控制项作为VSG控制的核心环节,其不仅直接影响系统的动态响应速度和稳定性,还在抑制功率振荡、平滑频率波动等方面发挥了重要作用[8-10],其设计是否合理直接影响并网装置的运行性能与电网稳定。
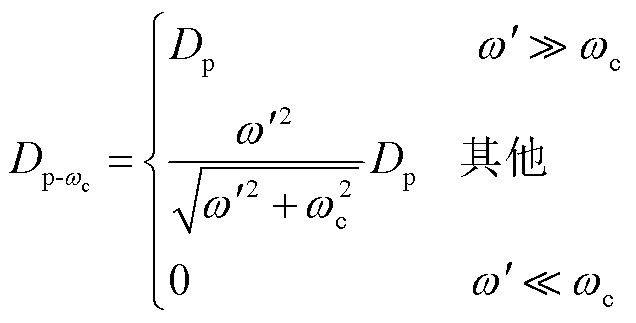
目前典型的阻尼控制形式有三种:定频率阻尼控制[11]、电网频率阻尼控制[12]及暂态阻尼控制[13]。定频率阻尼控制方式因简单易行而被广泛应用,其阻尼项与惯性环节耦合较大,文献[14]采用该控制建立传递函数,利用改进粒子群算法对关键参数初始值进行取值,对换流器的动态响应进行了一定改善。电网频率阻尼控制方式在阻尼项的频率差值中引入了锁相环(Phase-Locked Loop, PLL)测量得到的电网频率,其对惯性环节的依赖减小,但与电网频率的耦合增大,文献[15]对采用该控制方式的构网型和跟网型换流器的混联电力系统进行了暂态同步稳定分析,并据此给出了系统控制器参数的设计原则。目前对暂态阻尼控制方式的研究较多,其在定频率阻尼控制方式的阻尼通道基础上加入一阶高通滤波器(High-Pass Filter, HPF),旨在对中间控制量暂态化以提高控制性能,文献[16]对该控制进行了一定分析,利用主导极点法及频域分析给出了截止频率及其余关键参数的整定原则,具有一定的参考意义。
上述研究针对单一阻尼控制形式进行了设计、优化与稳定性分析,但缺乏对不同阻尼形式性能差异的分析。文献[17-18]指出,采用定频率阻尼控制时,其下垂控制和阻尼反馈简化成为下垂环节,在稳态下易受到电网频率影响而使得换流器功率输出出现误差积累,但并未对其暂态特性进行深入研究。文献[19-20]表明,由于引入了PLL控制,该方法虽然模拟了同步发电机的阻尼机理,但受限于PLL参数,电网频率阻尼控制方式在极弱电网、非线性负载等端口电压不稳定或畸变严重的条件下容易失效,引发系统稳定性问题。其对较为极端的控制情况做出了说明,而未讨论常规电网环境下该阻尼控制方式对系统阻尼特性的影响。文献[21]提出了模拟实际阻尼绕组暂态特性的暂态阻尼,将所研究的暂态阻尼和定频率阻尼控制方式进行对比,实验结果表明,在功率指令发生改变时前者输出振荡较后者大,但频率扰动时前者相较于后者输出较小。以上研究对于单一阻尼控制方式特性进行的分析多侧重于特定工况下的性能分析,缺乏不同阻尼控制形式对并网稳态、暂态特性及多场景适应性的横向对比分析,且没有对不同形式阻尼项的作用机理与性能边界进行研究。同时在实际工程应用中,常依赖经验调试,缺乏对采用不同阻尼控制的理论指导。
针对上述问题,本文基于常规VSG控制框架,以该三类典型阻尼控制形式为研究对象,系统性地分析了不同阻尼控制形式下并网特性的差异。首先,通过功率传输方程构建含电网频率约束的VSG统一数学模型框架;其次,以建立的模型为基础,基于频域分析方法,通过分析阻尼系数、截止频率等关键参数对功率动态响应与稳定性的影响规律,揭示了不同阻尼控制下阻尼作用机理与惯量-阻尼协同机制;最后,通过搭建实物样机系统,对比验证了各控制方式的输出差异,以此建立不同阻尼控制形式与电网运行场景的适配关系,为构网控制策略的阻尼控制形式选型与参数整定提供了理论依据。
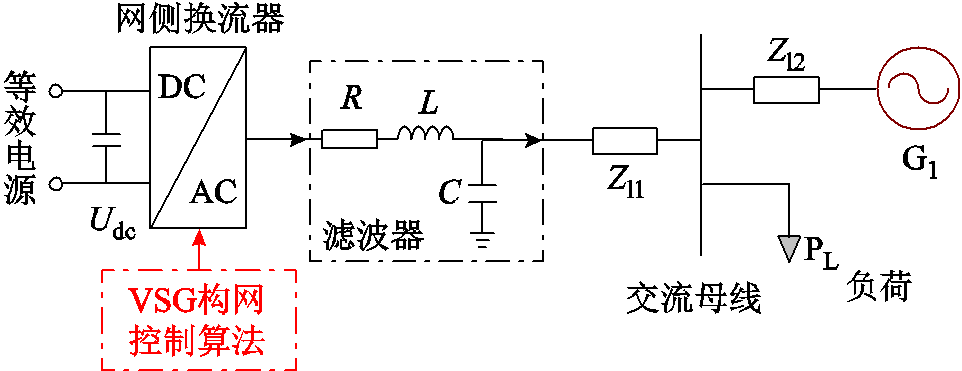
典型VSG拓扑结构如图1所示。新能源发电单元通过处理后视为等效直流电压源,网侧换流器采用VSG控制策略,经RLC滤波器汇集至交流母线。其中,Udc为直流电压值,G1为模拟电网的同步机,PL为负荷,Zl1与Zl2为线路阻抗。
图1 VSG拓扑结构
Fig.1 Structure of system containing VSG
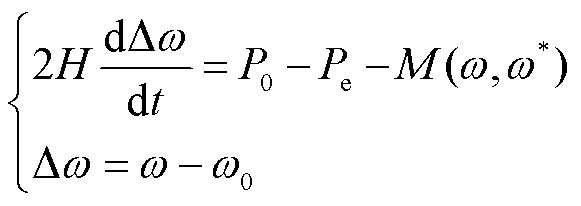
通过转子运动方程推导出VSG有功功率与输出频率的关系,其控制方程[22-23]为
 (1)
(1)
 (2)
(2)
式中,H为惯性时间常数;P0、Pe分别为模拟同步机的机械功率和电磁功率;ω为输出角频率;ωg为电网角频率;ω0为额定角频率;δGFM、δPCC分别为换流器与并网点母线相位;θ为两者相位差;M(ω,ω*)为阻尼控制项,与反馈被减的输入量ω*有直接关系。
无功电压控制采用PI反馈调节,有
 (3)
(3)
式中,E为VSG输出电压幅值;kp、ki分别为控制环节的比例、积分系数;Dq为下垂系数;Q0、U0分别为无功功率与电压设定值;Qe、U分别为无功输出与交流侧相电压幅值。
为了提高控制精度,简化控制环节,本文采用电压定向控制法(Voltage-Oriented Control, VOC),VSG控制框图如图2所示。
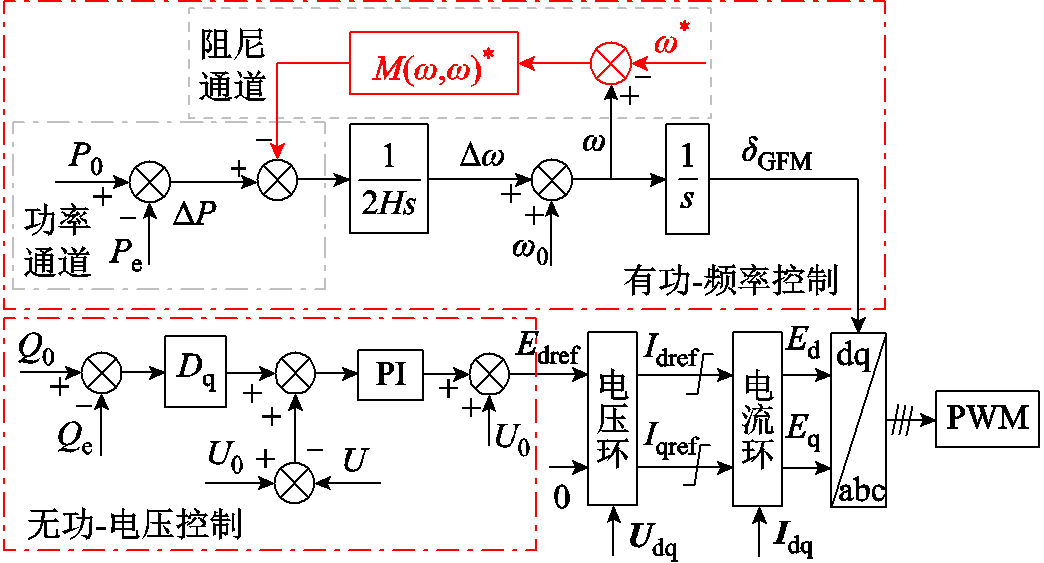
图2 VSG控制框图
Fig.2 VSG control diagram
定频率阻尼控制(M1)、电网频率阻尼控制(M2)及暂态阻尼控制(M3)的表现形式为
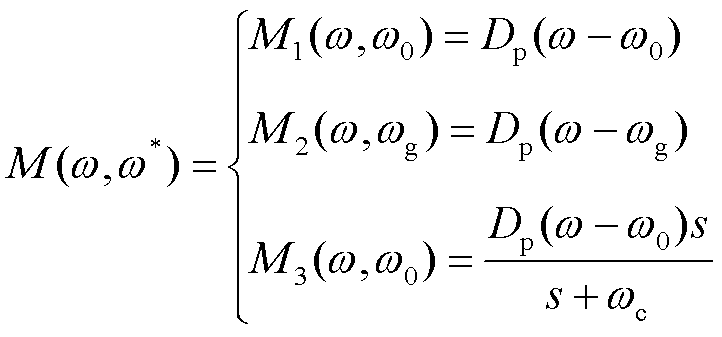 (4)
(4)
式中,Dp为阻尼系数;ωc为截止频率。根据式(4),图2控制框图中点画线框部分如图3所示。
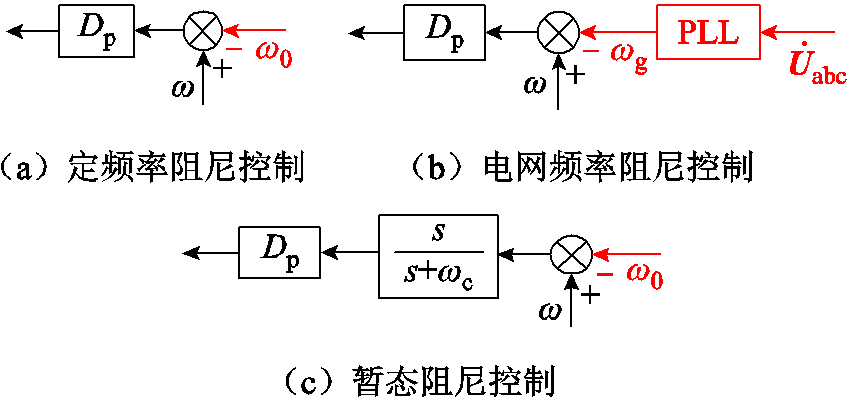
图3 阻尼项常见的三类控制
Fig.3 Three typical damping control methods
由图2与图3可知,当采用M1控制方式时,选取ω*=ω0,与整体控制前馈项加入的ω0相抵消,此时有功控制环节可简化为
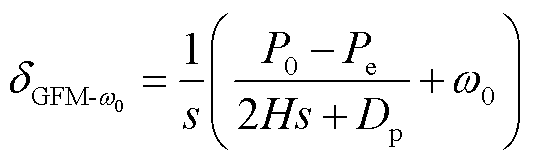 (5)
(5)
当采用M2控制方式时,需要从接入点得到母线频率,此时系统增加一个输入量ωg,代入式(5)可得有功环为
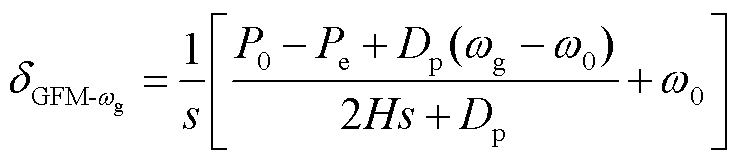 (6)
(6)
此处,ωg由PLL追踪电网频率得到,对于实际的PLL,不同控制参数会影响其追踪性能。本文假设PLL参数设计合理,输入量满足实际控制要求。
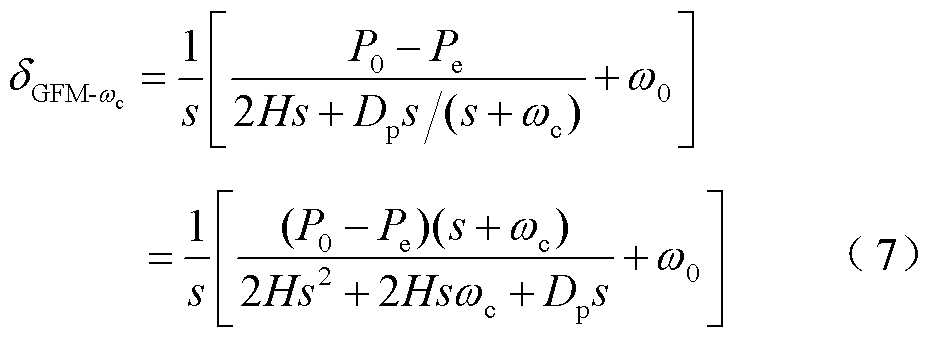
当采用M3控制方式时,由式(1)与图3c可知,其在定频率阻尼控制通道上加入一阶HPF,使得阻尼项作用受HPF限制。其传递函数与式(5)相似,有
对于采用VSG换流器功率输出传递函数的推导,目前大多数的研究都基于两个通道:①功率指令扰动通道;②频率扰动通道。由于功率指令改变为VSG控制的内部调控,所以一般在分析该通道传递函数时考虑VSG内部输出变化即可。但在频率扰动通道下,VSG功率输出特性与电网频率变化密切相关,在推导过程中需要重点考虑上述变化对功率输出的影响。
由图1可知,线路上有功功率的传输可表示为
 (8)
(8)
式中,Zn为线路总阻抗;Rn为线路总电阻;X为线路总电抗;θzn为线路阻抗角。
在实际输电线路中,线路电抗远远大于其电阻,因此本文中认为线路为纯感性电路,由此可将式(8)简化[24]为
 (9)
(9)
式中,Xn为忽略电阻情况下输出线路电抗。
对于M1控制方式而言,由式(5)可得此时VSG输出频率与系统频率变化的关系为
 (10)
(10)
所以,M1控制方式下的完整功率传递函数为
式中, 为M1方式的功率通道传递函数;
为M1方式的功率通道传递函数; 为M1方式的频率扰动传递函数,具体表达式为
为M1方式的频率扰动传递函数,具体表达式为
 (12)
(12)
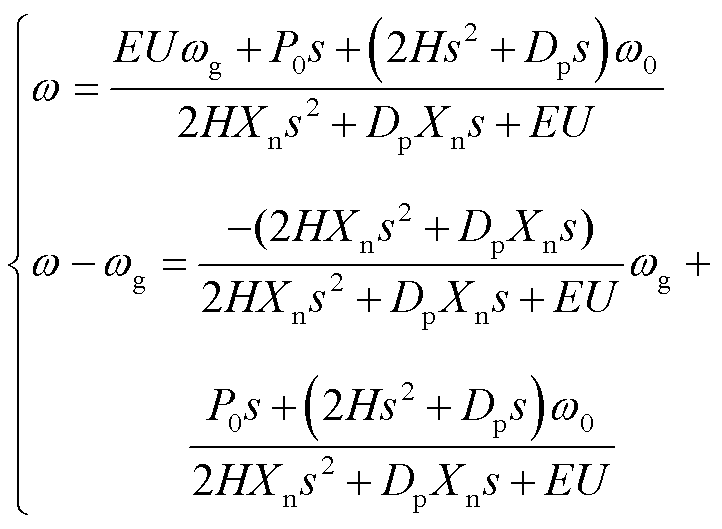
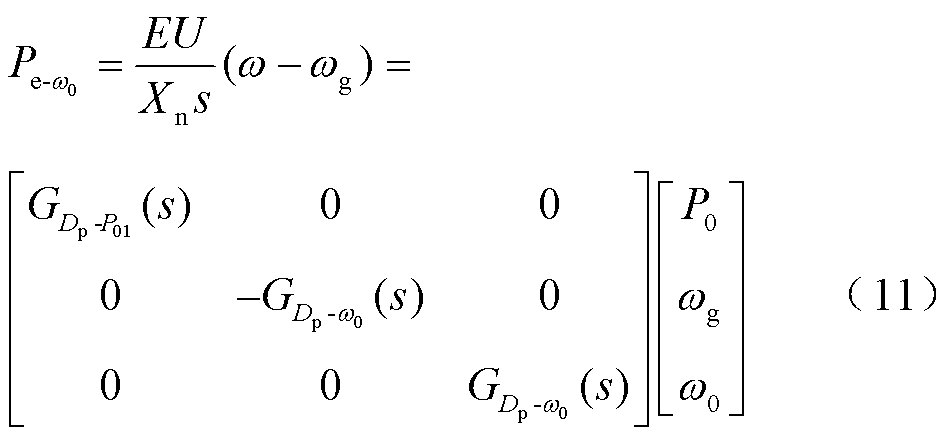
对于M2控制方式,由式(6)可得VSG输出频率与电网频率变化关系为
 (13)
(13)
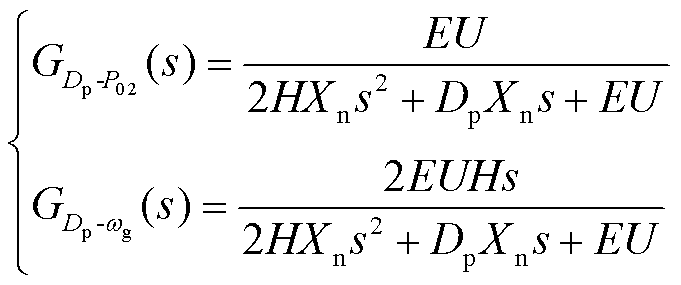
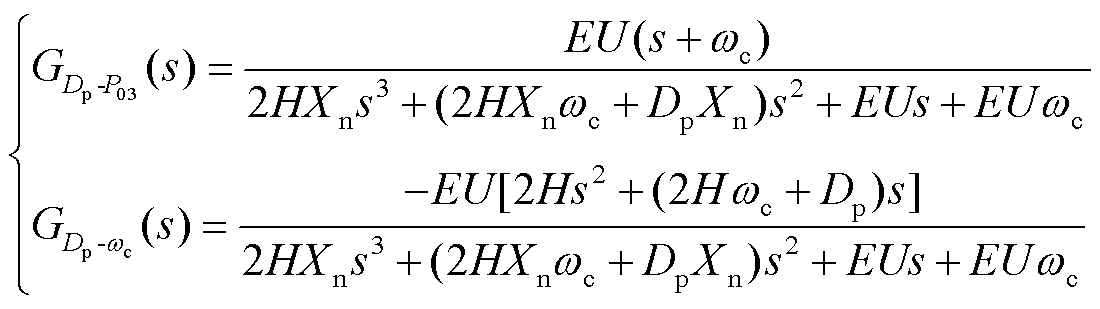
由式(6)与式(13)可知,M2控制方式下的完整功率传递函数为
 (14)
(14)
式中, 为M2方式的功率通道传递函数;
为M2方式的功率通道传递函数; 为M2方式的频率扰动传递函数,具体表达式为
为M2方式的频率扰动传递函数,具体表达式为
 (15)
(15)
在M3控制方式下,其传递函数与定频率阻尼控制方式类似,同理可得M3控制方式下的完整功率传递函数为
式中, 为M3方式的功率通道传递函数;
为M3方式的功率通道传递函数; 为M3方式的频率扰动传递函数,具体表达式为
为M3方式的频率扰动传递函数,具体表达式为
 (17)
(17)
为精细探究不同阻尼控制下VSG功率输出特性的异同,本节将以电网强弱的控制场景为区分,具体工作如下。
在强电网工况下,假设电网为理想电源,惯量和阻尼足够大,系统频率稳定不变,负荷的投切对系统不会产生影响,此时分两种情况:①系统稳态频率为标准额定频率,即ωg=ω0;②系统稳态频率与标准额定频率有一定偏差,即ωg≠ω0。
3.1.1 系统频率为标准频率(ωg=ω0)
在ωg=ω0情况下,由式(11)与式(13)可知,采用M1与M2控制方式在功率指令发生改变时的传递函数一致,因此本节将以前者进行分析,即
 (18)
(18)
由式(18)可知其为典型的二阶控制系统,其自然振荡频率ωn和阻尼比ζ为
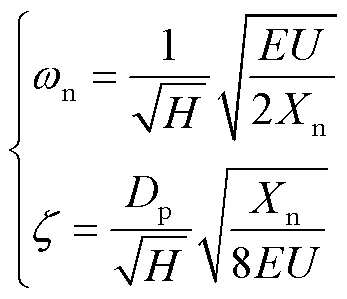 (19)
(19)
当阻尼系数Dp为定值时,随着惯性时间常数H的增大,系统函数的阻尼比逐渐减小,系统振荡加剧,稳定性降低,反之则相反;当H为定值时,随着Dp的增大,系统函数的阻尼比逐渐增大,系统振荡减小,稳定性加强。
在控制过程中,阻尼通道通过检测频率差值对功率通道进行反馈输出,以此减缓功率通道的数值不平衡,降低惯量作用,从而抑制功频振荡。由阻尼比可知,为保证系统的稳定性,一般在数值上Dp显著大于H。
若采用M3控制方式,同理可得在参考值发生改变后有
 (20)
(20)
在暂态过程中,对于阻尼通道而言,输入信号为Δω,即VSG输出角频率ω的变化频率 决定阻尼通道输入信号的频率。考虑HPF动态响应特性,该频率与截止频率ωc对阻尼项输出的数值影响可表示为
决定阻尼通道输入信号的频率。考虑HPF动态响应特性,该频率与截止频率ωc对阻尼项输出的数值影响可表示为
 (21)
(21)
但对于上述整体传递函数而言,仅有ΔP0直接体现对输出功率的影响,所以为简化控制分析,对一般功率指令阶跃过程,可在系统自然振荡频率处匹配阻尼效果为
 (22)
(22)
由于阻尼效果通常由阻尼系数实部进行贡献,即取式(22)实部,结合式(19)可得
 (23)
(23)
由此,在上述工况下将暂态阻尼简化为定值阻尼进行分析,通过式(23)可确定等效阻尼系数 与ωc之间的关系。
与ωc之间的关系。
3.1.2 系统频率不等于标准频率(ωg≠ω0)
在ωg≠ω0情况下,由式(17)与式(19)可知,对于功率通道指令的改变,VSG输出的功率总能达到改变量ΔP的平衡点,但由于此时ωg≠ω0,VSG输出的总功率同时还可能受到频率扰动通道的影响。
在采用M1控制方式时,由式(10)可知,系统稳态情况下VSG输出频率与电网频率相等,由式(11)可得VSG输出总功率为
 (24)
(24)
此时VSG控制在稳态下表现为一次调频控制形式,Dp表现为调频系数,总的电功率输出与设定值之间存在误差。
在采用M2控制方式时,由式(12)与式(13)可知VSG输出总功率为
 (25)
(25)
此时在稳态时阻尼项不会产生误差,系统输出总功率等于功率指令设定值。
在采用M3控制方式时,由式(16)与式(17)可得频率扰动通道稳态下对功率输出影响为
 (26)
(26)
此时由于HPF的过滤作用,在稳态时同样不会产生误差,系统输出总功率等于功率指令设定值。
在弱电网工况下,忽略VSG功率指令发生变化时对电网频率的影响,本文考虑负荷投切对电网系统的影响,显然强电网中所得的分析结果在弱电网中同样适用,由此本节将重点关注电网频率变化下的输出特性。
3.2.1 负荷投切时换流器瞬时响应
在负荷突然投切后(以负荷突增为例,本节下文分析均基于此),以同步发电机为基础的电网频率响应通常包含惯量响应、一次调频以及二次调频过程[25-26],其变化时序如图4所示。
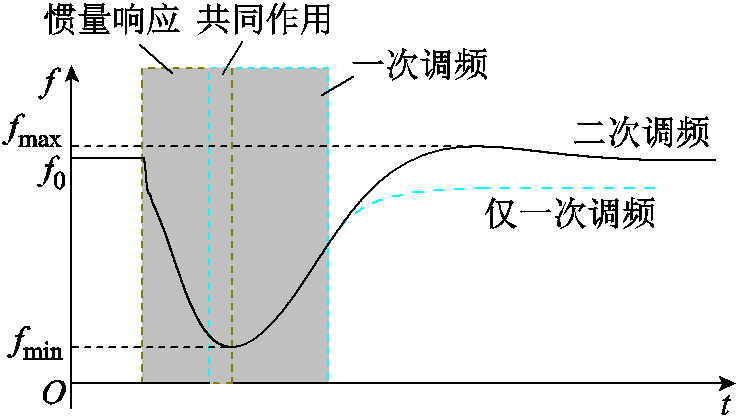
图4 电网频率变化时序
Fig.4 Time sequence of power grid frequency variation
不同形式阻尼控制下的换流器功频响应逻辑如图5所示。
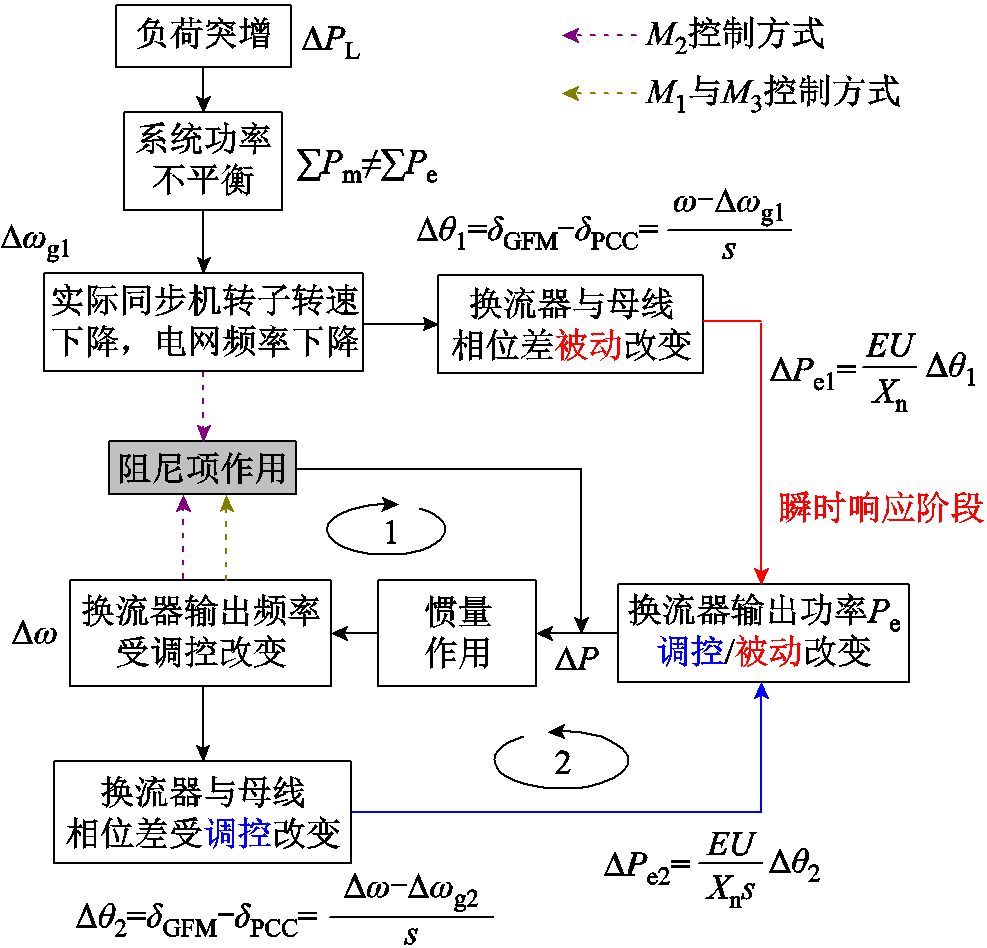
图5 换流器功频响应逻辑
Fig.5 Converter power-frequency response logic
对于M1和M3控制方式,整个换流器功频响应各阶段过程如下:
(1)负荷突增,系统功率供需不平衡,电网中的同步发电机开始释放转子能量,惯量响应启动,电网频率ωg开始下降。
(2)由于ωg下降,导致接入点母线与换流器输出的相位差θ增大,换流器输出功率Pe被动增加。
(3)换流器输出功率增大后,其变化量被VSG控制所捕捉,通过VSG方程输出调控频率ω向ωg同步,此举进一步调整两端相位差θ。
(4)通过调整后的相位差θ主动改变换流器输出功率Pe,在暂态过程中以此循环。
(5)系统中同步发电机通过一系列调频后使电网频率恢复稳态,换流器输出功率恢复初始值。
对于M2控制方式,在负荷投切瞬间输入VSG方程的变化量为ΔP与ω-ωg,阻尼项可直接启动,两者通过VSG方程后输出频率ω以调整相位差θ,所以此时M2控制方式换流器输出的频率下跌较快,其余逻辑与M1和M3所示逻辑一致。
由于在负荷投切瞬间,换流器输出功率Pe受相位差影响而被动改变,所以三种控制方式下的换流器在瞬间功率响应阶段的反应速度一致。由此,不同控制方式瞬时响应阶段特性总结见表1。
表1 不同控制方式瞬时响应阶段特性总结
Tab.1 Summary of characteristics during transient response phase under different control schemes
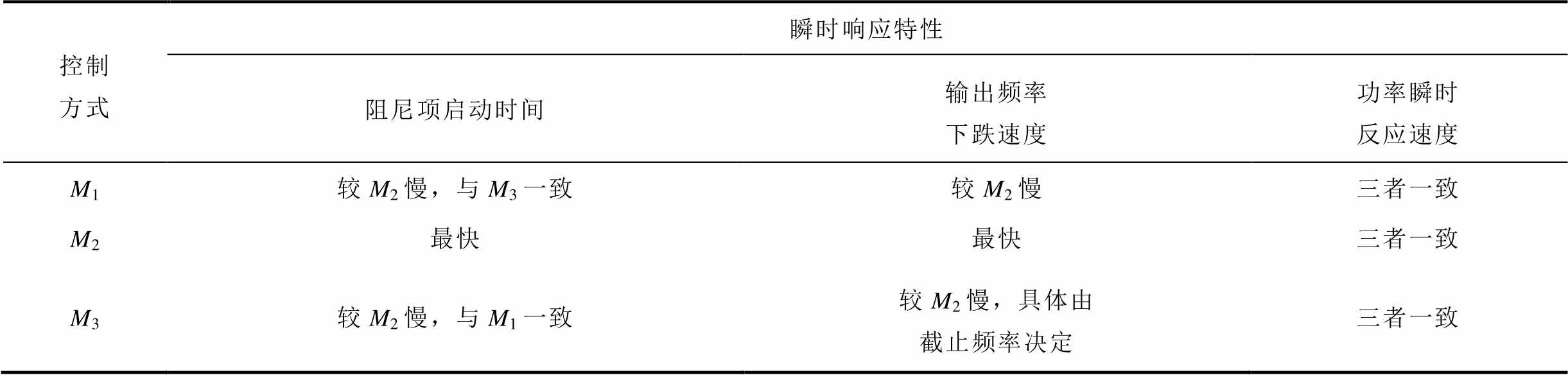
控制方式瞬时响应特性 阻尼项启动时间输出频率下跌速度功率瞬时反应速度 M1较M2慢,与M3一致较M2慢三者一致 M2最快最快三者一致 M3较M2慢,与M1一致较M2慢,具体由截止频率决定三者一致
3.2.2 暂态功率增发
若采用M1控制方式,从传递函数角度看,其暂态功率增发遵循式(10)与式(11),即
 (27)
(27)
由此可知,H与Dp均能提升换流器的暂态功率支撑能力。不同Dp传递函数的Bode图如图6所示。
由图6可知,当电网频率的波动处于较低频段时,传递函数在相同曲线上呈现相对恒定的增益特性。这是由于在低频工况下,系统更趋近于稳态运行,VSG输出频率与电网频率保持近似同步,此时阻尼项发挥作用(即增益产生机理),而该频段内惯
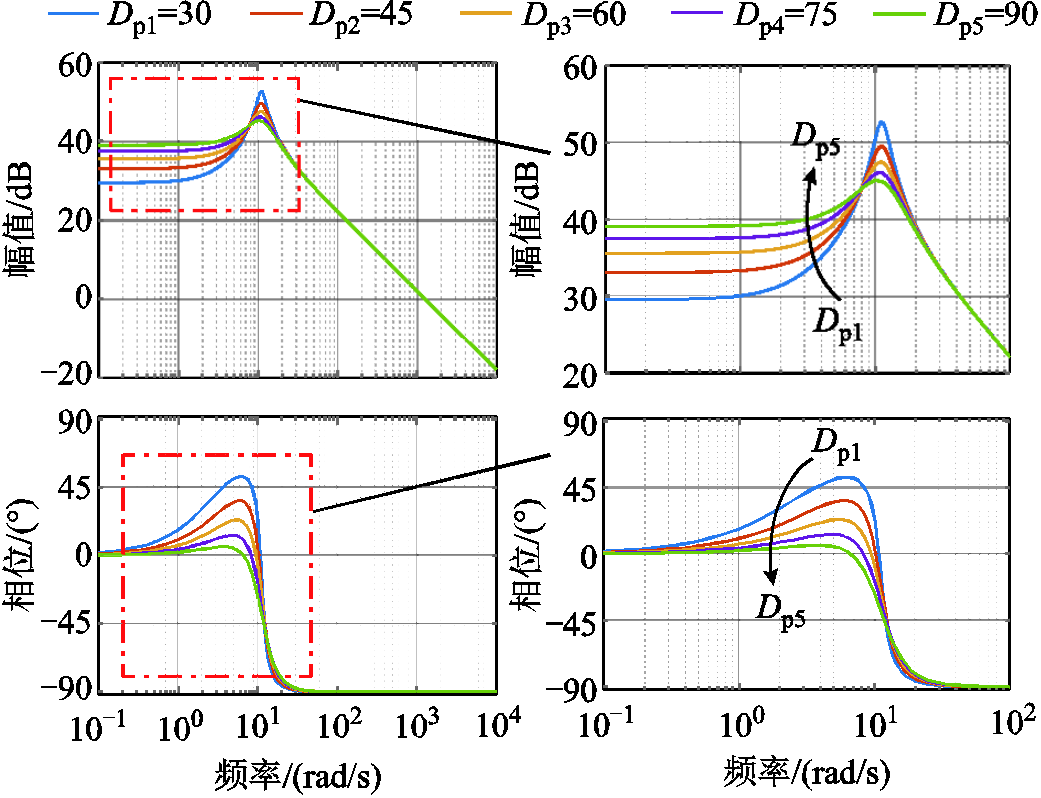
图6 M1控制方式下频率扰动通道Bode图
Fig.6 Bode diagram of frequency disturbance channel under M1 control scheme
量作用受惯性时间常数H的约束,其对功率增量的影响显著弱于阻尼作用,即
 (28)
(28)
此时阻尼作用主导暂态功率调节,暂态功率输出主要受阻尼系数Dp调控。随着Dp增大,传递函数增益同步提升,导致暂态功率输出幅值增加。当输入信号频率升高时,相位裕度与增益均增大,系统暂态响应能力与稳定性增强,且Dp取值越低时相位裕度提升速率越快,系统稳定裕度越高,波动越小。随着输入信号频率向中高频段迁移,各传递函数曲线增益整体抬升,这源于电网频率波动加剧导致惯量作用更为显著。在特定频带内,Dp增大会强化对惯量作用的抑制效应,此时阻尼兼具调频支撑和抑制振荡的作用。当输入信号频率超出系统带宽上限时,高频分量无法有效地响应,导致输出增益衰减。
在工程实践中,系统负荷扰动引发的电网频率波动频率多集中于0.1~1 Hz频段,此时由于电网中实际同步机的作用,系统惯性将主导低频响应,一次调频需要时间反应,但在此范围内,上述控制下的阻尼作用通过实时的一次调频机制可快速补偿功率缺额,与实际同步机特性有一定差异。
若采用M2控制方式,电网频率ωg在暂态过程中一直变化,暂态增发功率遵循式(14),即
 (29)
(29)
由式(29)可知,在上述控制方式下,H的增大在一定频段内会提升换流器的暂态功率支撑能力,而Dp的增加则会对暂态功率增发产生抑制作用。进一步分析,不同Dp传递函数的Bode图如图7所示。
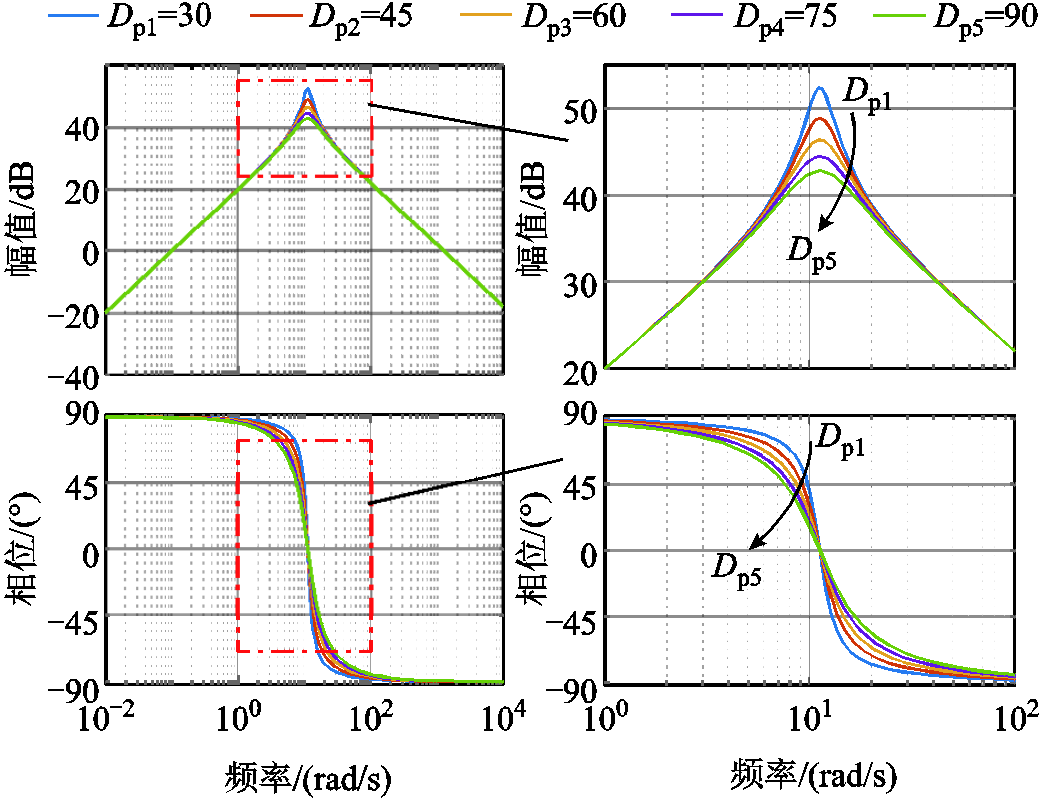
图7 M2控制方式下频率扰动通道Bode图
Fig.7 Bode diagram of frequency disturbance channel under M2 control scheme
由图7可知,当电网频率波动处于较低频段时,传递函数增益随着输入信号频率的降低呈现递减趋势。这是由于随着频率趋近稳定工况,VSG输出频率与电网频率趋于同步,导致阻尼项作用弱化。此时,惯量作用对暂态功率增量的影响权重显著高于阻尼作用,惯量主导暂态功率输出,即
 (30)
(30)
由式(30)和图7可知,在该频段内,阻尼系数Dp的增大将强化阻尼项的抑制作用,传递函数的增益减小,暂态功率输出降低。随着输入信号频率向中高频段迁移,函数增益呈现递增特性,同理,源于电网频率波动加剧导致系统频率缺额扩大,使得惯量作用更为显著。在特定频率范围内,随着Dp增大,其对输出的抑制开始明显增大。同理,当输入信号频率过高时会因带宽问题导致输出增益衰减。
对于一般负荷变化,由以上分析可知,此时阻尼项对于暂态功率增发的贡献度趋于零,暂态功率通过惯量作用增发,阻尼作用主要为抑制换流器功角振荡而削弱功率支撑。所以采用M2控制方式时,换流器没有一次调频能力,其在惯量响应阶段与传统同步机控制特性一致,Dp越大功率支撑能力越弱。
若采用M3控制方式,其功率增发遵循式(16),即
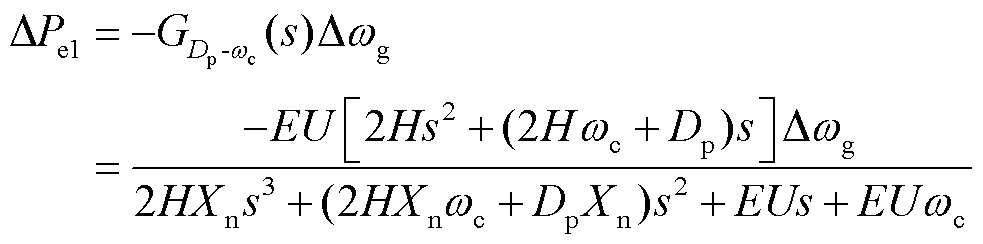 (31)
(31)
在Dp相同时,不同ωc传递函数的Bode图如图8,其中ωc=0为对照组视为M1控制方式。
图8 不同截止频率下频率扰动通道Bode图
Fig.8 Bode diagram of the frequency disturbance channel under different cutoff frequencies
由图8可知,当电网频率波动处于较低频段时,传递函数增益随输入信号频率降低而减小。这是由于在低频段系统趋于稳态,HPF特性导致阻尼通道数值显著削弱。在该频段有
 (32)
(32)
由式(32)可知,此时截止频率对惯量作用具有一定的加强作用,而对于阻尼为负面的抑制作用。随着截止频率减小,相位裕度降低,增益相对增大,这是由于HPF对阻尼项的削弱作用减弱、惯量的削弱作用增强,阻尼通道反馈值相对增大,从阻尼通道数值看,其可等效于定频率阻尼控制,输出的暂态功率增发也相应增加。随着截止频率上升,惯量及阻尼作用的低频分量被削弱的程度加剧,但惯量作用的高频分量被加大,所以惯量作用将变强,阻尼作用变弱。随着输入信号频率逐渐升高,HPF作用逐渐减弱,控制特性趋近于定频率阻尼控制,其变化规律与后者一致。
在ωc相同、不同Dp的情况下传递函数的Bode图如图9所示,其分析可同理等效定频率阻尼控制方式。
由以上分析可知,对于一般负荷变化,ωc相对Dp对暂态功率增发起相反作用,M3控制方式的控制特性在输出变化上与M1阻尼控制方式相似,但此时阻尼作用由于受到输入信号频率变化的影响而不能直接视为一次调频,实际特性由ωc大小决定。
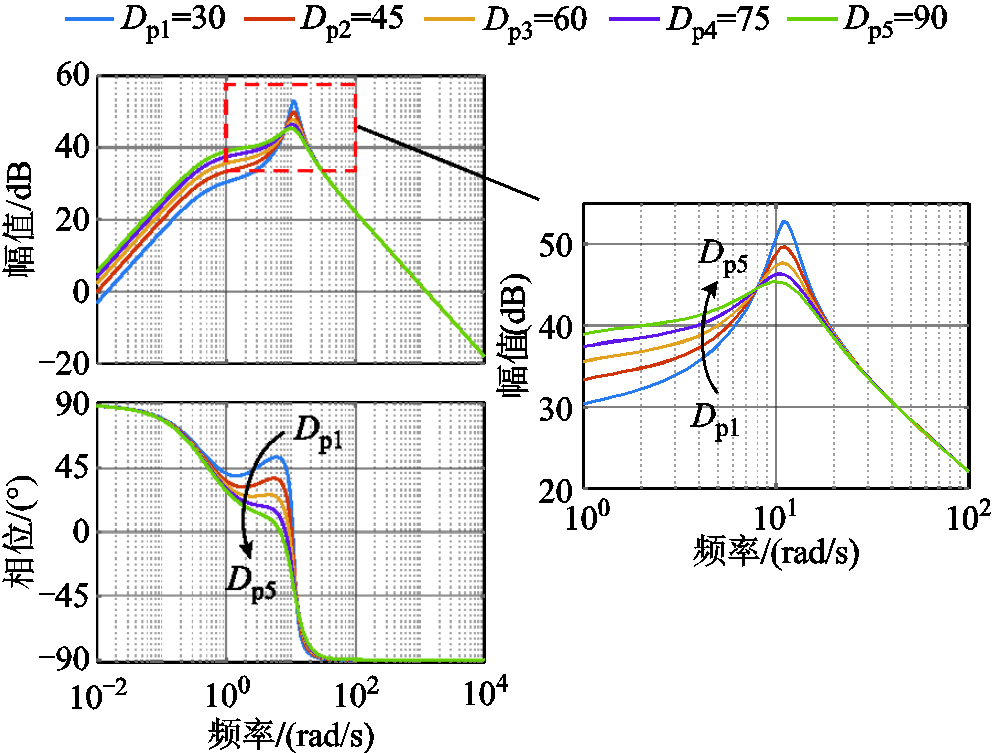
图9 不同阻尼系数下扰动通道Bode图
Fig.9 Bode diagram of the disturbance channel under different damping coefficients
考虑到样机系统比仿真更能反映实际作用效果,本文全部实验均基于图10所示的样机系统开展。
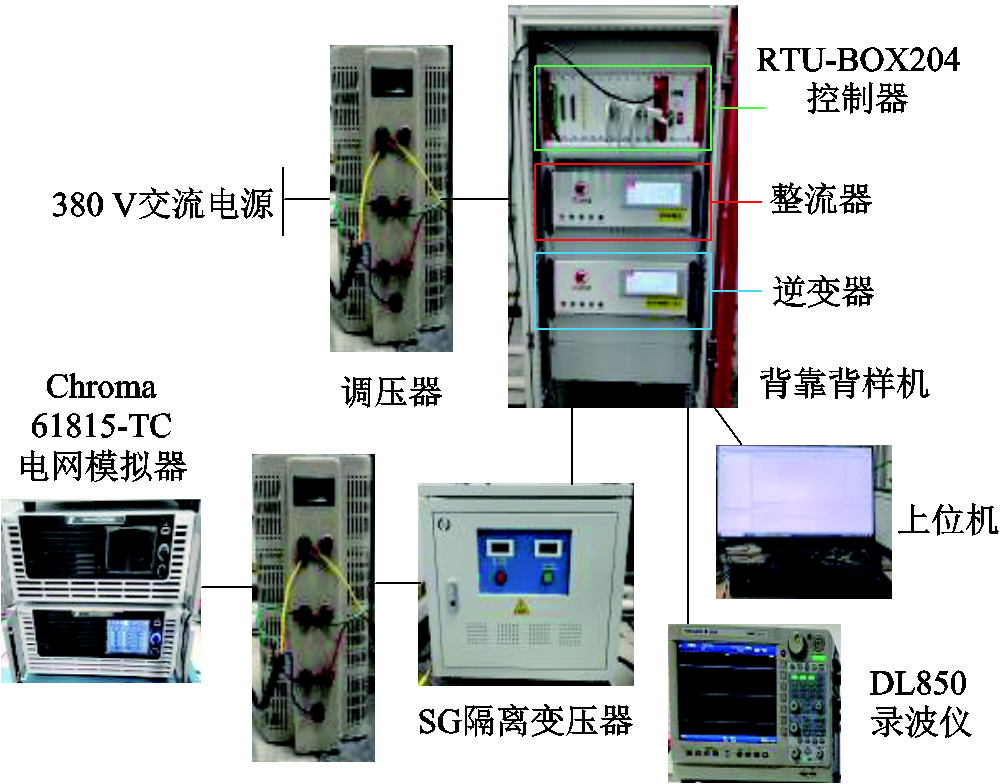
图10 实验样机测试系统
Fig.10 Experimental prototype test system
该样机系统由380 V交流电源、SG隔离变压器、调压器、多级功率变换集成样机及Chroma 61815-TC电网模拟器构成。交流电压由系统前端输入,经调压器输出至样机整流端,在本文中为逆变侧提供稳定直流输入。逆变侧嵌入VSG算法,其采用了三个半桥模块RTM-PEH8035IE,每个模块最高耐压800 V,最大电流35 A,输出的三相电压通过隔离变压器后经调压器接入电网模拟器,电网模拟器可模拟电网各种工况。
上位机为计算机端,通过FPGA实现ms级实时控制,同步调节VSG阻尼系数及截止频率等关键参数;数据采集系统采用高压差分探头与多通道录波仪DL850,精准采集逆变器输出电流/电压、直流母线电压等状态变量。
实验测试包括稳态、功率指令变化和负荷突变三种工况,逆变端实验参数详见表2。
表2 实验模型与控制参数配置
Tab.2 Experimental system parameter configuration
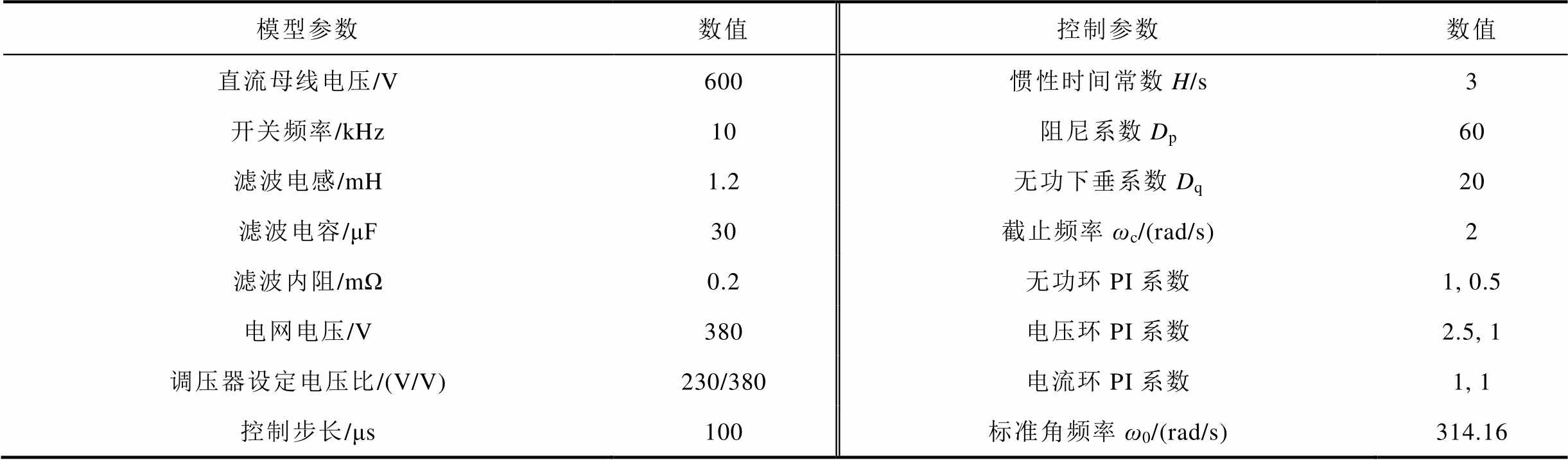
模型参数数值控制参数数值 直流母线电压/V600惯性时间常数H/s3 开关频率/kHz10阻尼系数Dp60 滤波电感/mH1.2无功下垂系数Dq20 滤波电容/μF30截止频率ωc/(rad/s)2 滤波内阻/mΩ0.2无功环PI系数1, 0.5 电网电压/V380电压环PI系数2.5, 1 调压器设定电压比/(V/V)230/380电流环PI系数1, 1 控制步长/μs100标准角频率ω0/(rad/s)314.16
需要说明的是,表2参数为初始实验配置,实验过程中将采用控制变量法,在保持其他参数不变的情况下,探究相关参数改变对输出特性的影响规律。
4.2.1 稳态输出误差
在实验过程中,将人为调节电网频率与阻尼系数。不同关键参数影响下稳态误差如图11所示。
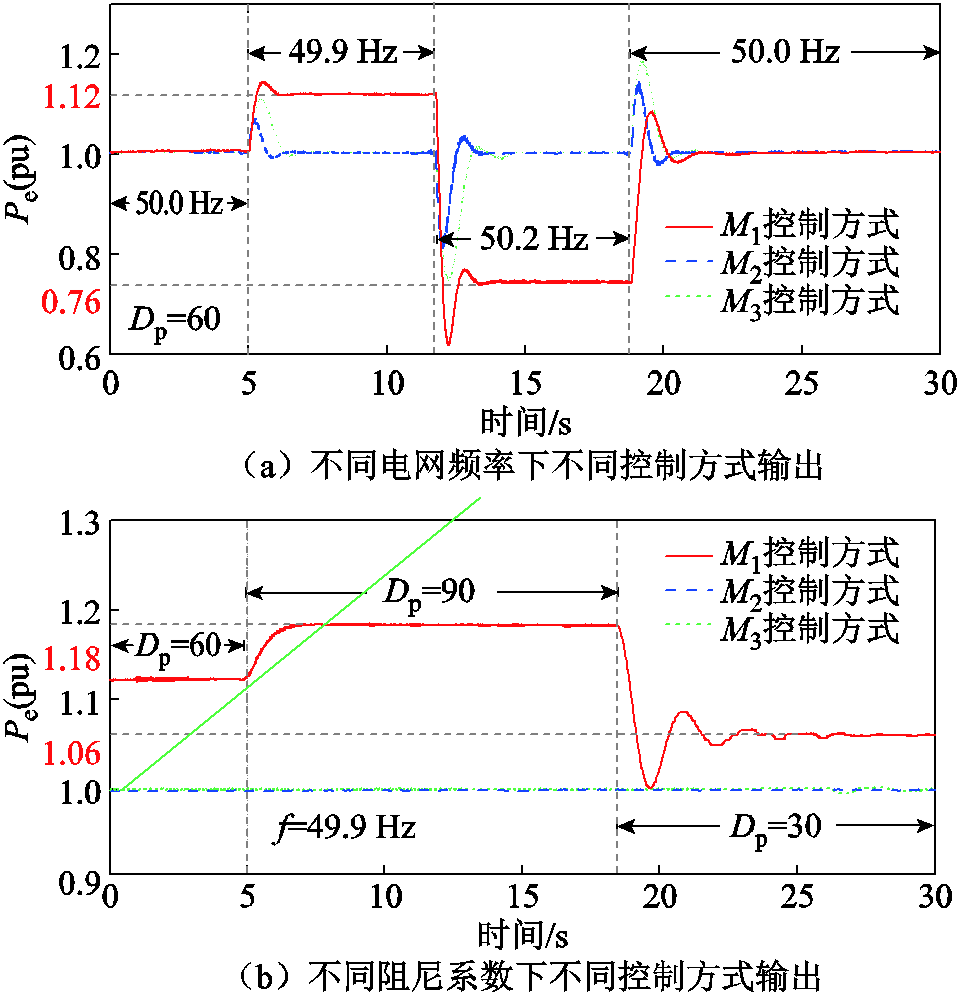
图11 不同关键参数影响下稳态误差
Fig.11 Steady-state error under different key parameter influences
如图11a所示,初始电网频率为50 Hz,换流器输出有功功率1(pu),在第5 s时频率变至49.9 Hz。当恢复稳态时,采用M1控制方式的换流器稳态误差值为0.12(pu),而M2及M3控制方式换流器无稳态误差。在第12 s频率变至50.2 Hz,采用M1控制方式的换流器误差值为0.24(pu),其余控制方式同理。
如图11b所示,电网频率恒为49.9 Hz。在第5 s时Dp增大为90,仅有采用M1控制方式的换流器输出具有暂态变化,恢复稳态后输出误差值为0.18(pu),在第17 s时Dp减小为30,误差值为0.06(pu)。
4.2.2 功率指令变化
本实验主要针对M3控制方式下不同Dp与ωc产生的变化进行分析。功率指令改变下关键参数对暂态输出影响对比如图12所示。

图12 功率指令改变下关键参数对暂态输出影响对比
Fig.12 Comparative analysis of key parameters’ impact on transient output under power command variations
如图12a所示,初始换流器初始有功指令为0.5(pu),在第1 s时有功指令阶跃至1(pu)。在同一截止频率下,当Dp减小时,系统振荡加剧。如图12b所示,同样初始条件,在同一Dp下,HPF减弱阻尼通道低频成分的影响,当ωc较大时,系统振荡加剧;当ωc逐渐变小时,系统趋于稳定。如图12c所示,将M3控制方式与等效阻尼控制方式对比,结果较为符合。
4.2.3 负荷突变瞬时响应
将测量得到的端口输出频率与电网频率代入阻尼项进行数据拟合,结果如图13所示。
初始换流器输出有功功率1(pu),如图13a、图13b所示,采用M2控制方式的阻尼项相对于其他两种控制方式可直接启动,在前期第3.08 s前数值上与电网频率变化相同;M2控制方式下换流器输出的频率跌落速度最快,与其他两种方式频率差值在第3.21 s左右达最大值0.05 Hz。由图13c可知,三种控制方式功率瞬时变化一致,均在第3.08 s左右启动。
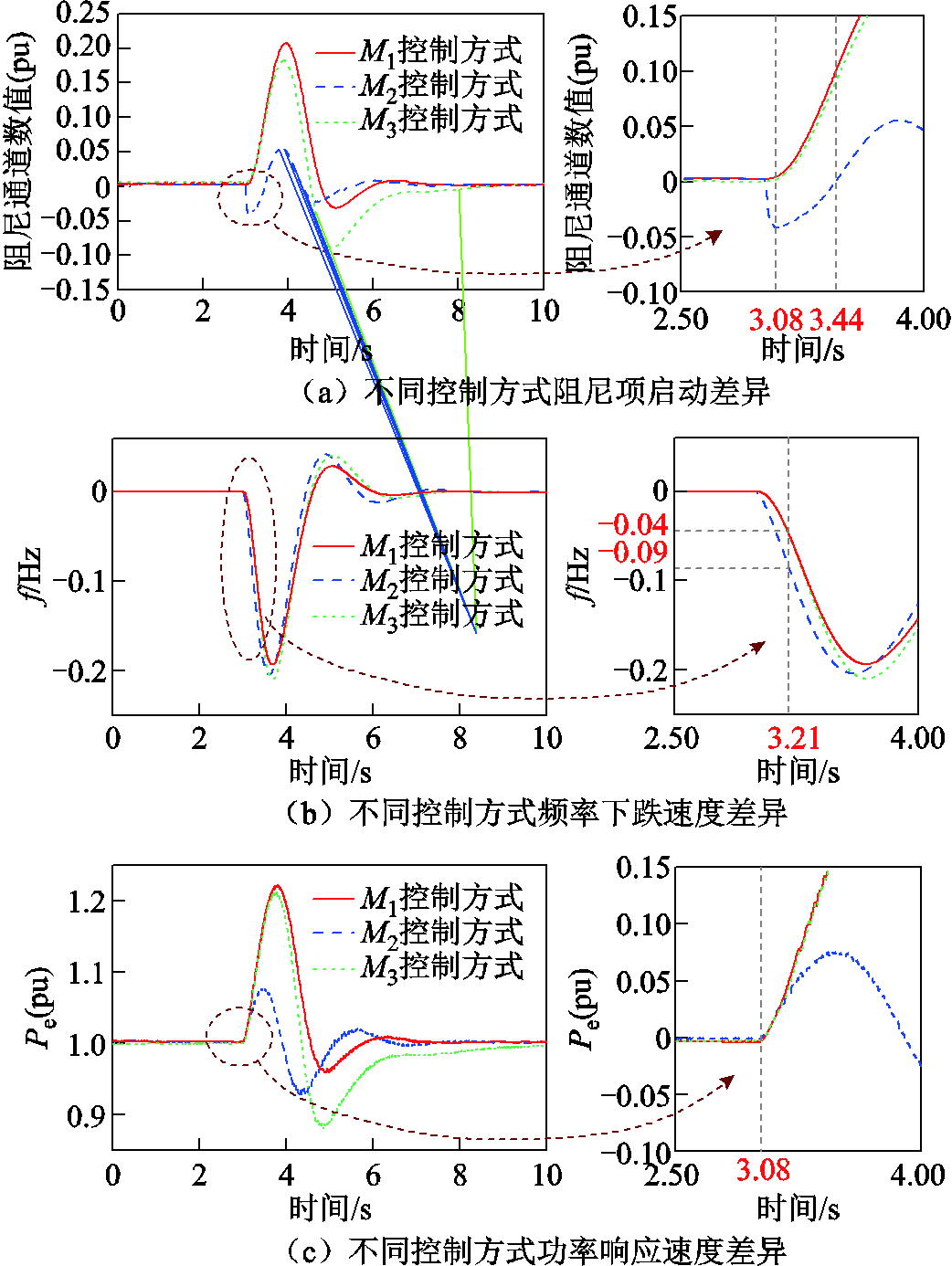
图13 不同控制方式瞬时响应特性对比
Fig.13 Comparative analysis of transient response speeds under different control schemes
4.2.4 暂态功率增发
初始换流器输出有功功率1(pu),第2 s时向电网中投入有功负荷3(pu)。将测量得到的电网频率数据代入不同阻尼项计算阻尼作用主导量,代入式(28)、式(29)及式(32)计算惯量作用主导量以及总功率增发量,结果如图14所示。
如图14a所示,在暂态功率增发上升阶段,阻尼主导了功率增发,作用量最大为0.208(pu),而惯量作用量最大为0.05(pu);当VSG输出频率开始上升时,惯量作用与阻尼作用方向开始相反,阻尼作用抑制惯量导致的功率振荡。
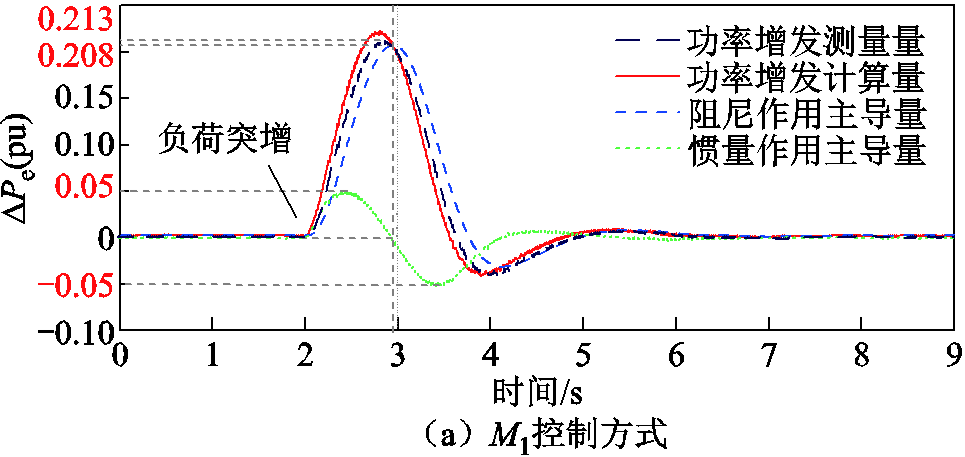
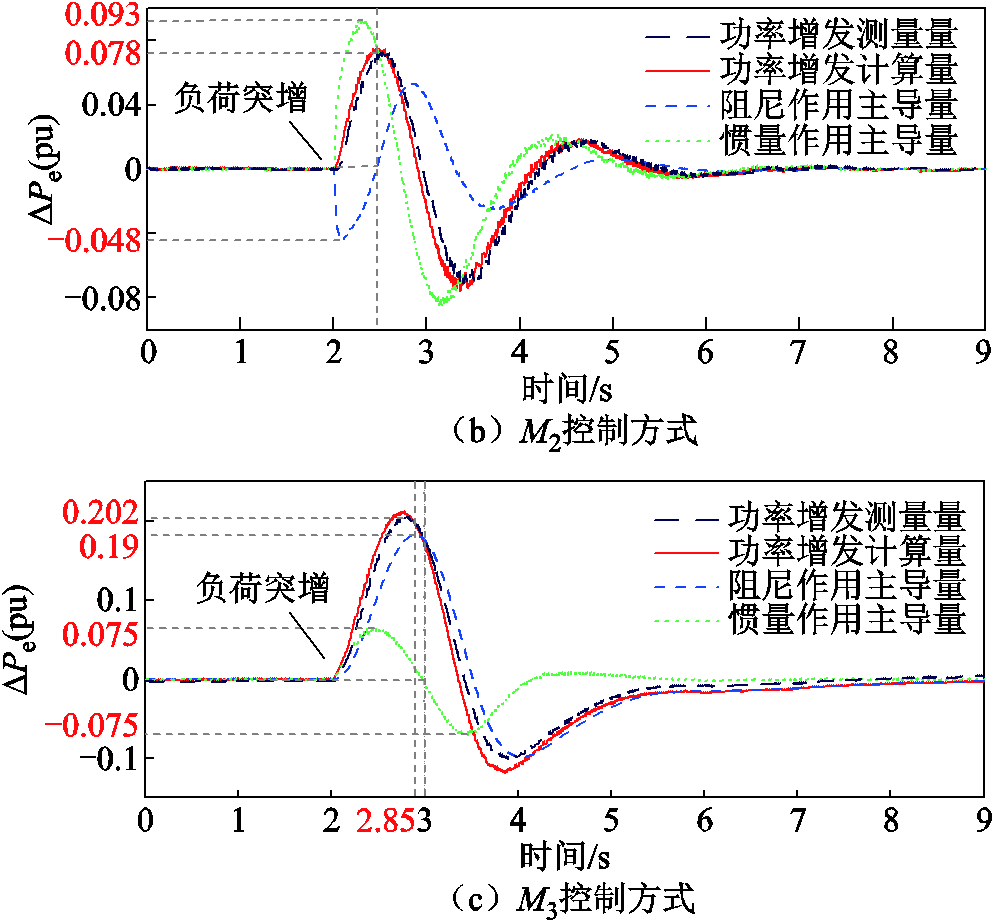
图14 不同控制方式下各环节功率作用量对比
Fig.14 Comparative analysis of power distribution among system components under different control strategies
如图14b所示,在暂态功率增发上升阶段,惯量对功率增发具有促进作用,阻尼为反向的抑制作用,惯量作用量最大为0.093(pu),阻尼作用量最大为-0.048(pu);恢复阶段,在阻尼作用的影响下,惯量作用对功率振荡变化的影响削弱。
而图14c在暂态功率上升阶段同图14a,由于HPF作用,阻尼作用量最大值为0.19(pu),相较于M1控制方式减少0.018(pu),而惯量作用量为0.075(pu),相较于M1控制方式增加0.025(pu)。
同样初始条件下,不同控制方式下不同阻尼系数的输出对比如图15所示。如图15a、图15b所示,在采用M1控制方式时,随着阻尼系数的增大,换流器暂态增发的功率增多,输出振荡减小;而采用M2控制方式的换流器输出功率振荡较大,同时随着阻尼系数的增大,换流器暂态增发功率减小,其输出的振荡减小。
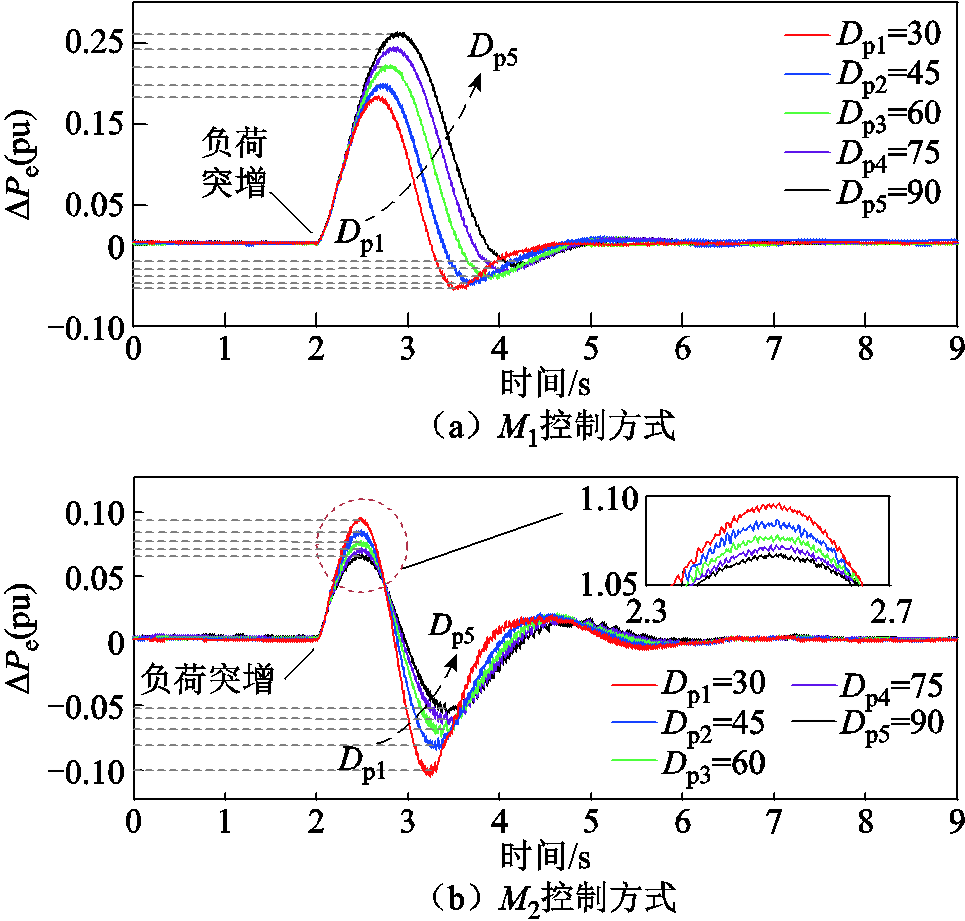
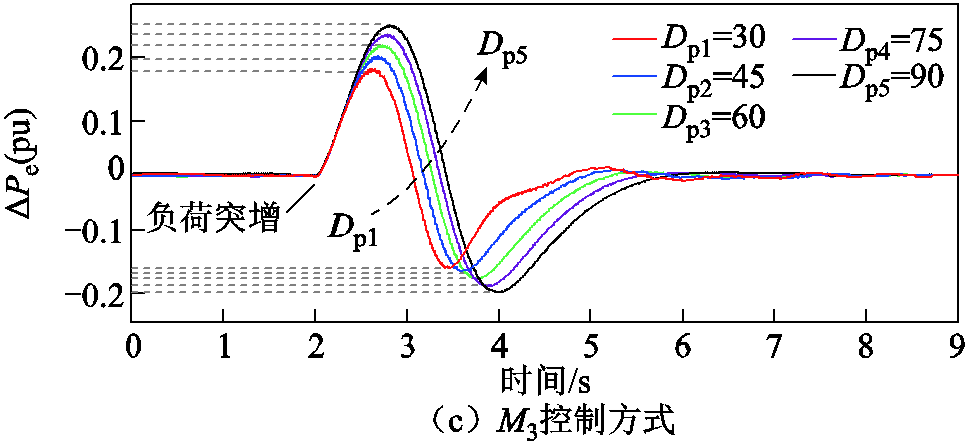
图15 不同控制方式下不同阻尼系数输出对比
Fig.15 Comparative analysis of output responses under different control schemes with varying damping coefficients
对于M3控制方式的功率增发,如图15c所示,可同理M1控制方式,但由于HPF对阻尼通道低频分量的削弱,在频率恢复阶段阻尼对惯量振荡的抑制作用削弱,阻尼系数越大其削弱作用越明显,输出振荡加剧。在此重点对不同截止频率下的输出进行分析。不同截止频率下各环节作用对比如图16所示,其中ωc=0为对照组视作M1控制方式。
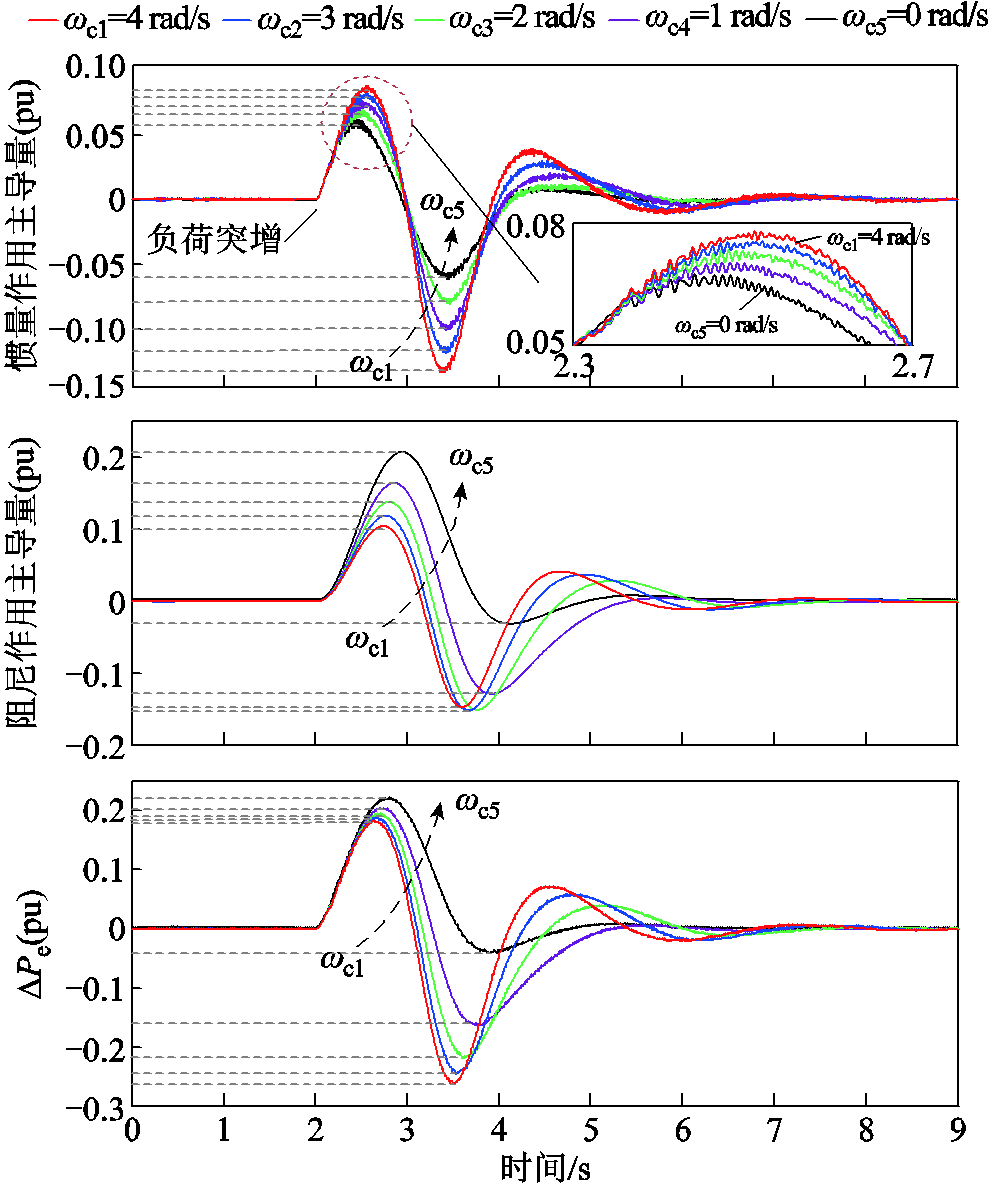
图16 不同截止频率下各环节作用对比
Fig.16 Comparative analysis of component-level effects under different cutoff frequencies
如图16所示,随着截止频率的增大,惯量及阻尼作用的低频分量被削弱的程度加剧,但阻尼作用的高频分量被保留,惯量作用的高频分量被加大,此时惯量和阻尼作用主导的功率增量出现较大的振荡情况,进而输出功率振荡加剧。而由于H与Dp数值的差异,总体功率增发减小。
综上所述,不同形式阻尼控制方式下并网控制特性与适用场景总结见表3。
表3 不同形式阻尼控制方式下VSG输出特性、优缺点以及适用场景
Tab.3 Summary of VSG output characteristics, advantages and disadvantages and applicable scenarios under different forms of damping control modes
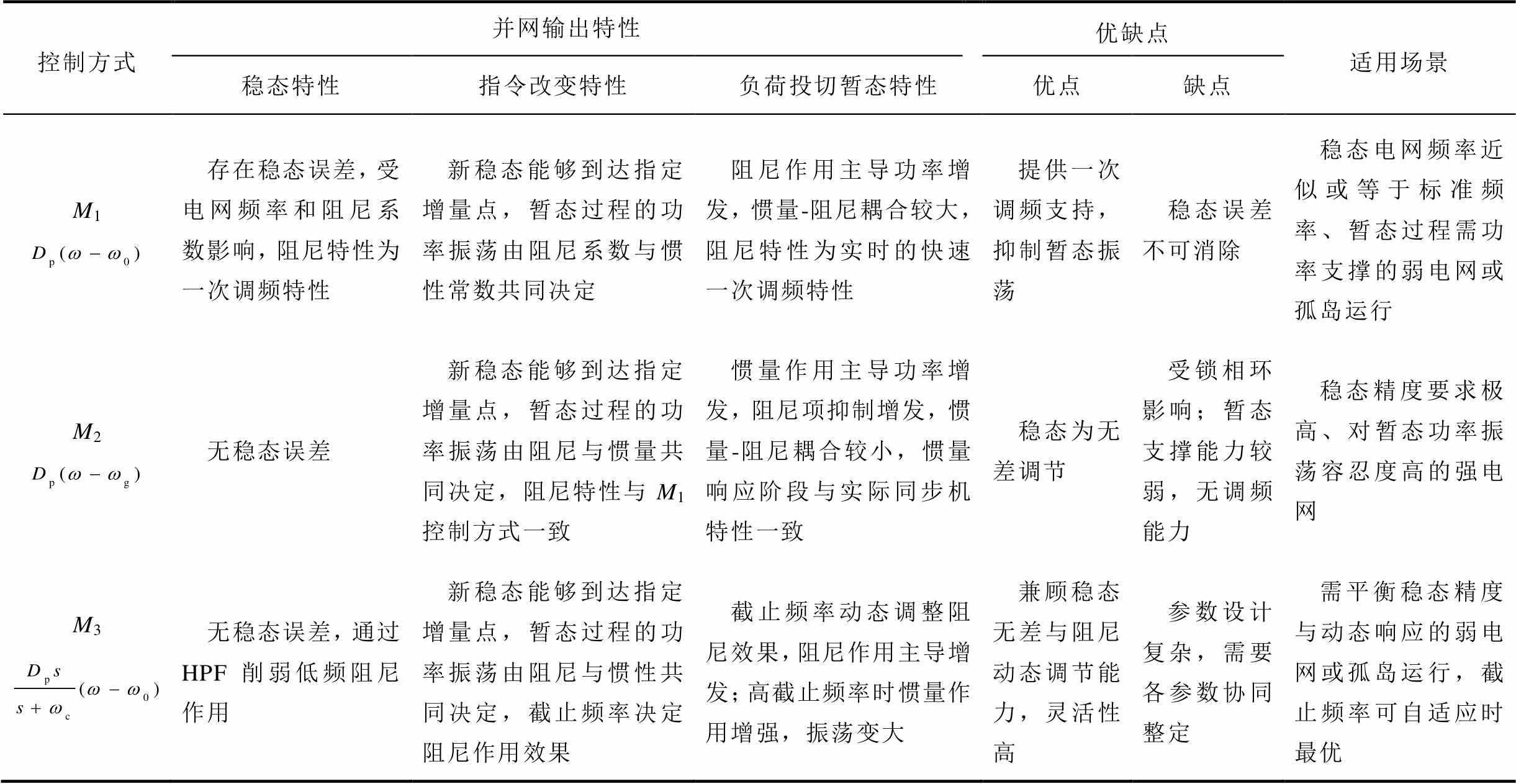
控制方式并网输出特性优缺点适用场景 稳态特性指令改变特性负荷投切暂态特性优点缺点 M1存在稳态误差,受电网频率和阻尼系数影响,阻尼特性为一次调频特性新稳态能够到达指定增量点,暂态过程的功率振荡由阻尼系数与惯性常数共同决定阻尼作用主导功率增发,惯量-阻尼耦合较大,阻尼特性为实时的快速一次调频特性提供一次调频支持,抑制暂态振荡稳态误差不可消除稳态电网频率近似或等于标准频率、暂态过程需功率支撑的弱电网或孤岛运行 M2无稳态误差新稳态能够到达指定增量点,暂态过程的功率振荡由阻尼与惯量共同决定,阻尼特性与M1控制方式一致惯量作用主导功率增发,阻尼项抑制增发,惯量-阻尼耦合较小,惯量响应阶段与实际同步机特性一致稳态为无差调节受锁相环影响;暂态支撑能力较弱,无调频能力稳态精度要求极高、对暂态功率振荡容忍度高的强电网 M3无稳态误差,通过HPF削弱低频阻尼作用新稳态能够到达指定增量点,暂态过程的功率振荡由阻尼与惯性共同决定,截止频率决定阻尼作用效果截止频率动态调整阻尼效果,阻尼作用主导增发;高截止频率时惯量作用增强,振荡变大兼顾稳态无差与阻尼动态调节能力,灵活性高参数设计复杂,需要各参数协同整定需平衡稳态精度与动态响应的弱电网或孤岛运行,截止频率可自适应时最优
本文通过理论建模、频域分析和实验验证,系统地研究了定频率阻尼控制(M1)、电网频率阻尼控制(M2)及暂态阻尼控制(M3)三种VSG控制策略的稳态与暂态特性差异,得到以下结论:
1)通过M1控制方式的关键系统辨识参数对M3控制方式的功率通道传递函数进行定值阻尼系数等效,可简化控制分析,直观展现控制效果。
2)通过分析阻尼系数、截止频率等关键参数对功率动态响应与稳定性的调控规律,揭示了负荷投切时不同阻尼控制下阻尼作用机理与惯量-阻尼协同机制,研究表明:
(1)M1中阻尼主导暂态功率增发,可将其视为一次调频特性。频率下降阶段惯量与阻尼共同促进功率增发,频率上升阶段阻尼抑制惯量使功率振荡。
(2)M2中惯量主导暂态功率增发,阻尼抑制功率输出振荡但削弱功率支撑能力,与实际同步机惯量响应阶段类似。
(3)M3性能受截止频率与阻尼系数协同影响,高截止频率时惯量作用增强,阻尼作用削弱,振荡变大。
3)基于样机系统开展了实验,通过实验深入分析并明确了各种控制方式的优缺点及适用场景。
参考文献
[1] 谢小荣, 贺静波, 毛航银, 等. “双高”电力系统稳定性的新问题及分类探讨[J]. 中国电机工程学报, 2021, 41(2): 461-475. Xie Xiaorong, He Jingbo, Mao Hangyin, et al. New issues and classification of power system stability with high shares of renewables and power electronics [J]. Proceedings of the CSEE, 2021, 41(2): 461-475.
[2] 罗宇航, 肖凡, 郑宇婷, 等. 基于稳定域的PQ控制并网逆变器稳定性分析方法[J]. 电工技术学报, 2025, 40(22): 7334-7348. Luo Yuhang, Xiao Fan, Zheng Yuting, et al. Stability analysis method of grid-connected inverter with PQ control based on stable operating region[J]. Transactions of China Electrotechnical Society, 2025, 40(22): 7334-7348.
[3] 黎博, 陈民铀, 钟海旺, 等. 高比例可再生能源新型电力系统长期规划综述[J]. 中国电机工程学报, 2023, 43(2): 555-581. Li Bo, Chen Minyou, Zhong Haiwang, et al. A review of long-term planning of new power systems with large share of renewable energy[J]. Proceedings of the CSEE, 2023, 43(2): 555-581.
[4] 张智刚, 康重庆. 碳中和目标下构建新型电力系统的挑战与展望[J]. 中国电机工程学报, 2022, 42(8): 2806-2819. Zhang Zhigang, Kang Chongqing. Challenges and prospects for constructing the new-type power system towards a carbon neutrality future[J]. Proceedings of the CSEE, 2022, 42(8): 2806-2819.
[5] 舒印彪, 张正陵, 汤涌, 等. 新型电力系统构建的若干基本问题[J]. 中国电机工程学报, 2024, 44(21): 8327-8341. Shu Yinbiao, Zhang Zhengling, Tang Yong, et al. Fundamental issues of new-type power system con-struction[J]. Proceedings of the CSEE, 2024, 44(21): 8327-8341.
[6] 许诘翊, 刘威, 刘树, 等. 电力系统变流器构网控制技术的现状与发展趋势[J]. 电网技术, 2022, 46(9): 3586-3595. Xu Jieyi, Liu Wei, Liu Shu, et al. Current state and development trends of power system converter grid-forming control technology[J]. Power System Technology, 2022, 46(9): 3586-3595.
[7] 刘辉, 于思奇, 孙大卫, 等. 构网型变流器控制技术及原理综述[J]. 中国电机工程学报, 2025, 45(1): 277-297. Liu Hui, Yu Siqi, Sun Dawei, et al. An overview of control technologies and principles for grid-forming converters[J]. Proceedings of the CSEE, 2025, 45(1): 277-297.
[8] 迟永宁, 江炳蔚, 胡家兵, 等. 构网型变流器: 物理本质与特征[J]. 高电压技术, 2024, 50(2): 590-604. Chi Yongning, Jiang Bingwei, Hu Jiabing, et al. Grid-forming converters: physical mechanism and characteristics[J]. High Voltage Engineering, 2024, 50(2): 590-604.
[9] 迟永宁, 江炳蔚, 范译文, 等. 构网型变流器: 控制与稳定特性[J]. 高电压技术, 2025, 51(4): 1527-1542. Chi Yongning, Jiang Bingwei, Fan Yiwen, et al. Grid-forming converters: control and behavior of stability [J]. High Voltage Engineering, 2025, 51(4): 1527-1542.
[10] 陈建, 任永峰, 孟庆天, 等. 含UDE附加阻尼支路的构网型直驱永磁同步风电机组次同步振荡抑制策略[J]. 电工技术学报, 2024, 39(7): 1985-2000. Chen Jian, Ren Yongfeng, Meng Qingtian, et al. Sub-synchronous oscillation suppression strategy for grid-forming direct-drive permanent magnet synchronous generator with uncertainty and disturbance estimator supplementary damping branch[J]. Transactions of China Electrotechnical Society, 2024, 39(7): 1985-2000.
[11] 李志军, 贾学岩, 王丽娟, 等. 基于改进惯量阻尼特性的VSG控制策略[J]. 太阳能学报, 2021, 42(7): 78-85. Li Zhijun, Jia Xueyan, Wang Lijuan, et al. Improved virtual synchronous generator based on enhanced inertia and damping characteristics[J]. Acta Energiae Solaris Sinica, 2021, 42(7): 78-85.
[12] Liu Jia, Miura Y, Bevrani H, et al. Enhanced virtual synchronous generator control for parallel inverters in microgrids[J]. IEEE Transactions on Smart Grid, 2017, 8(5): 2268-2277.
[13] 江世明, 唐杰. 基于暂态阻尼增强的改进VSG控制策略[J]. 电力系统保护与控制, 2023, 51(19): 144-154. Jiang Shiming, Tang Jie. Improved VSG control strategy based on transient damping enhancement[J]. Power System Protection and Control, 2023, 51(19): 144-154.
[14] 张自力, 刁亚飞, 田志杰, 等. 基于适应迁移粒子群算法的光储构网型灵活调节策略[J/OL]. 华北电力大学学报(自然科学版), 2024: 1-12. [2024-09-19]. https://kns.cnki.net/KCMS/detail/detail.aspx?filename=HBDL20240915001&dbname=CJFD&dbcode=CJFQ. Zhang Zili, Diao Yafei, Tian Zhijie, et al. Flexible grid-forming control strategy for photovoltaic energy storage system based on adaptive moving particle swarm optimization algorithm[J/OL]. Journal of North China Electric Power University (Natural Science Edition), 2024: 1-12. [2024-09-19]. https://kns.cnki. net/KCMS/detail/detail.aspx?filename=HBDL20240915001&dbname=CJFD&dbcode=CJFQ.
[15] 黄森, 姚骏, 钟勤敏, 等. 含跟网和构网型新能源发电单元的混联电力系统暂态同步稳定分析[J]. 中国电机工程学报, 2024, 44(21): 8378-8392. Huang Sen, Yao Jun, Zhong Qinmin, et al. Transient synchronization stability analysis of hybrid power system with grid-following and grid-forming renewable energy generation units[J]. Proceedings of the CSEE, 2024, 44(21): 8378-8392.
[16] 李新, 刘国梁, 杨苒晨, 等. 具有暂态阻尼特性的虚拟同步发电机控制策略及无缝切换方法[J]. 电网技术, 2018, 42(7): 2081-2088. Li Xin, Liu Guoliang, Yang Ranchen, et al. VSG control strategy with transient damping term and seamless switching control method[J]. Power System Technology, 2018, 42(7): 2081-2088.
[17] 石荣亮, 王斌, 黄冀, 等. 储能虚拟同步机的并网阻尼特性分析与改进策略[J]. 太阳能学报, 2023, 44(7): 30-38. Shi Rongliang, Wang Bin, Huang Ji, et al. Analysis and improvement strategy of grid-connected damping characteristic for energy storage VSG[J]. Acta Energiae Solaris Sinica, 2023, 44(7): 30-38.
[18] 魏腾, 李昕涛. 基于改进阻尼控制的VSG控制策略[J]. 微电机, 2024, 57(9): 30-36. Wei Teng, Li Xintao. VSG control strategy based on improved damping control[J]. Micromotors, 2024, 57(9): 30-36.
[19] 李明烜, 王跃, 徐宁一, 等. 基于带通阻尼功率反馈的虚拟同步发电机控制策略[J]. 电工技术学报, 2018, 33(10): 2176-2185. Li Mingxuan, Wang Yue, Xu Ningyi, et al. Virtual synchronous generator control strategy based on bandpass damping power feedback[J]. Transactions of China Electrotechnical Society, 2018, 33(10): 2176-2185.
[20] Wen Bo, Boroyevich D, Burgos R, et al. Analysis of D-Q small-signal impedance of grid-tied inverters[J]. IEEE Transactions on Power Electronics, 2016, 31(1): 675-687.
[21] 杨效, 曾成碧, 苗虹, 等. 优化虚拟同步发电机惯量和阻尼的自适应控制策略[J]. 太阳能学报, 2023, 44(11): 495-504. Yang Xiao, Zeng Chengbi, Miao Hong, et al. Optimizing adaptive inertia and damping control strategy of virtual synchronous generator[J]. Acta Energiae Solaris Sinica, 2023, 44(11): 495-504.
[22] 王开让, 赵一名, 孟建辉, 等. 基于自适应模型预测控制的光储虚拟同步机平滑并网策略[J]. 高电压技术, 2023, 49(2): 831-839. Wang Kairang, Zhao Yiming, Meng Jianhui, et al. Smooth grid-connected strategy for photovoltaic-storage virtual synchronous generator based on adaptive model predictive control[J]. High Voltage Engineering, 2023, 49(2): 831-839.
[23] 刘思佳, 刘海涛, 张隽, 等. 基于等效阻抗的虚拟同步机电压支撑影响因素分析与改进控制策略研究[J].电工技术学报, 2025, 40(9): 2738-2751. Liu Sijia, Liu Haitao, Zhang Jun, et al. Research on the analysis of VSG voltage support influence factors and improvement control strategies based on equivalent impedance[J]. Transactions of China Electrotechnical Society, 2025, 40(9): 2738-2751.
[24] 郭潇镁, 李永刚, 周一辰. 基于变权重自适应MPC的VSG调频控制策略[J]. 电工技术学报, 2025, 40(21): 6956-6969. Guo Xiaomei, Li Yonggang, Zhou Yichen. VSG frequency regulation control strategy based on variable weight adaptive MPC[J]. Transactions of China Electrotechnical Society, 2025, 40(21): 6956-6969.
[25] 孟建辉, 叶泰然, 任必兴, 等. 考虑频率不同响应阶段的惯量评估优化策略[J]. 电力自动化设备, 2024, 44(11): 171-177.Meng Jianhui, Ye Tairan, Ren Bixing, et al. Optimization strategy for inertia assessment considering different frequency response stages[J]. Electric Power Automation Equipment, 2024, 44(11): 171-177.
[26] 刘晓明, 刘俊, 姚宏伟, 等. 基于VSG的风光水火储系统频率调节深度强化学习方法[J]. 电力系统自动化, 2025, 49(9): 114-124. Liu Xiaoming, Liu Jun, Yao Hongwei, et al. Deep reinforcement learning method for frequency regulation of wind-solar-hydro-thermal-storage systems based on virtual synchronous generator[J]. Automation of Electric Power Systems, 2025, 49(9): 114-124.
Abstract The increasing integration of renewable energy sources into power systems has intensified challenges such as low inertia and weak grid support. Grid-forming converters based on virtual synchronous generator (VSG) control emulate voltage-source characteristics to enhance grid stability. Damping control, a pivotal element in VSG strategies, critically influences dynamic response, oscillation suppression, and power-sharing accuracy. However, existing studies predominantly focus on individual damping control designs, lacking systematic comparisons of output characteristics and damping mechanisms across different strategies. This gap leads to empirical parameter tuning in practice, limiting optimal performance. To address this, the study systematically investigates three damping control strategies—fixed-frequency damping (M1), grid-frequency damping (M2), and transient damping (M3)—to elucidate their steady-state and transient performance differences, inherent damping mechanisms, and applicability in diverse grid scenarios.
A unified mathematical framework for VSG power transfer functions under grid frequency constraints was derived using power transmission equations, incorporating grid frequency deviations and damping dynamics. Frequency-domain analysis was conducted to quantify the influence of key parameters (damping coefficient Dp, cutoff frequency ωc, and inertia constant H) on stability margins, transient power overshoot, and oscillation attenuation. Experimental validation was performed on a 380 V hardware prototype, comprising a grid simulator, FPGA-based VSG controller, and multi-level power converters. Steady-state, power command tracking, and load-step tests were executed to validate theoretical findings.
Key results reveal distinct characteristics: M1 introduces steady-state power errors (0.12(pu)~0.24(pu) under ±0.1 Hz frequency deviations) due to its dependency on grid frequency for damping feedback. However, it provides robust transient power support dominated by damping effects, achieving 0.208(pu) power surge during load steps. Inertia-damping coupling amplifies oscillations at low damping ratios;M2 eliminates steady-state errors by decoupling damping from grid frequency but weakens transient power support (0.092(pu) peak) as inertia dominates dynamics. Its behavior aligns with synchronous generators, where damping suppresses oscillations but limits power contribution;M3 balances steady-state accuracy and dynamic adaptability through a high-pass filter (HPF). At low cutoff frequencies (ωc=2 rad/s), it mimics M1 with reduced oscillations; higher ωcvalues enhance inertia effects but increase overshoot by 15% compared to M1.
The study further establishes operational guidelines: M1 is suited for weak grids or islanded systems requiring transient power support and primary frequency regulation;M2 excels in strong grids prioritizing steady-state precision, particularly in frequency-stable environments;M3 offers adaptability for hybrid scenarios, where adjustable ωc enables trade-offs between static accuracy and dynamic response.
These findings address the lack of comparative analysis in existing literature and provide actionable insights for parameter tuning. For instance, increasing Dp in M1 enhances stability but amplifies steady-state errors, while in M2, higher Dp reduces oscillations at the cost of transient support. The HPF in M3 introduces design complexity but enables scenario-specific optimization.
The work bridges theoretical modeling and practical implementation, offering a foundation for adaptive damping control in future grid-forming converters. Future research will explore multi-objective optimization of damping parameters under unbalanced grid conditions and renewable intermittency.
Keywords:Grid-forming control, different damping control, damping mechanism, load disturbance, grid-connection characteristics
DOI: 10.19595/j.cnki.1000-6753.tces.250557
中图分类号:TM761
国家电网冀北电力有限公司科技项目资助(B3018K240067)。
收稿日期 2025-04-07
改稿日期 2025-05-13
孟建辉 男,1987年生,高级工程师,硕士生导师,研究方向为新能源并网发电与保护技术。E-mail:mengjianhui2008@163.com
刘 昊 男,2001年生,硕士研究生,研究方向为构网型换流器控制技术及其应用。E-mail:1696824711@qq.com(通信作者)
(编辑 赫 蕾)