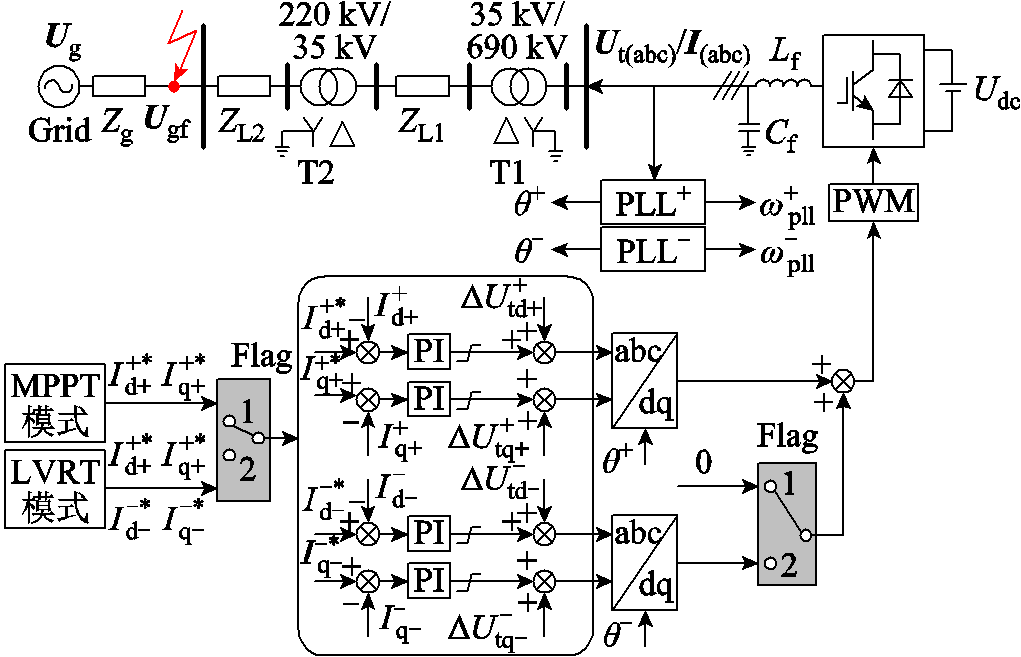
图1 在电网不对称故障下的并网VSC控制框图
Fig.1 Control block digram of grid-connected VSC under asymmetric grid faults
摘要 电网不对称短路故障期间可再生能源发电装备与电网之间,以及正负序分量之间均存在显著的动态交互行为,使得以电压源型变流器为并网接口的可再生能源发电装备在故障期间的暂态同步失稳问题突出。为此,该文基于正负序分离的双序锁相环控制模型,揭示了系统正负序之间的控制耦合特性。进一步探究锁相环比例/积分系数以及故障穿越指令对系统正负序等效功角暂态行为的影响规律。分析结果表明:正负序机端电压q轴分量中电动势的不平衡是导致锁相同步型并网变流器在电网不对称故障期间发生暂态同步失稳的关键。较长的故障检测延时以及不恰当的低电压穿越(LVRT)指令可能导致正负序锁相环因加减速能量不匹配而发生暂态同步失稳。此外,为了提高电网不对称故障期间系统的暂态同步稳定性,提出了锁相同步型并网变流器在电网不对称故障下的暂态同步稳定增强控制策略。最后,进行了仿真和实验验证。
关键词:电网不对称故障 锁相同步型并网变流器 暂态同步稳定 控制耦合特性 稳定控制策略
近年来,以风力发电、光伏发电等为代表的可再生能源发电技术迅速发展,新能源装机容量不断增加[1-2]。然而,受可再生能源资源分布的影响,大型可再生能源基地通常位于偏远地区,电网强度较弱,极易出现短路故障,尤其是不对称短路故障频发[3]。受限于电力电子设备的弱抗扰性[4-5],采用电压源型变流器(Voltage Source Converter, VSC)为并网接口的可再生能源发电系统在电网不对称故障期间极易发生暂态失步(Loss of Synchronous, LOS)现象,造成VSC大规模脱网。
为了确保含大规模VSC接入的电力系统的安全稳定运行,国内外围绕以VSC为并网接口的可再生能源发电系统在电网故障下的暂态稳定进行了广泛研究。文献[6[7]-8]指出电网故障期间并网VSC锁相环(Phase-Locked Loop, PLL)平衡点的缺失是导致系统发生暂态失步的关键。文献[9]指出电网故障期间系统不恰当的有功无功电流注入方式,也会导致系统因加减速面积不匹配而发生暂态同步失稳。然而,上述文献主要聚焦并网VSC在电网对称故障期间的暂态同步稳定问题,在电力系统发生的短路故障中,对称短路故障仅占5%,绝大多数为不对称故障[10]。
与对称故障下的暂态运行特性相比,并网VSC在不对称故障下的暂态运行特性更加复杂。文献[11-13]指出在不对称短路期间,由于系统的正序和负序阻抗网络相互连接,导致并网VSC的正负序分量之间也存在显著的动态交互行为。为此,文献[14-16]基于正负序分离的双序锁相环模型,分析了并网VSC在电网不对称故障期间的四种暂态同步失稳形态,并给出了并网VSC在故障期间平衡点存在的条件。在文献[17-18]中,研究了并网VSC在电网不对称故障期间不同的正负序无功电流穿越指令对系统暂态同步稳定性的影响。尽管上述文献对并网VSC在电网故障期间的暂态同步特性进行了初步探究,但是没有直观地揭示系统正负序PLL在电网不对称故障期间的耦合控制行为,缺少对正负序PLL在不同控制参数下[19]动态控制耦合行为的探究,也没有深入分析系统正负序有功无功故障穿越指令[20]对系统正负序等效功角的暂态特性的影响规律。为此,有必要进一步研究并网VSC正负序PLL在电网不对称故障期间的耦合控制特性,揭示不同参数对系统暂态同步稳定性的影响规律。
为了减少电网故障期间并网VSC的暂态同步失稳的风险,文献[6]提出了一种电压自适应的暂态同步稳定控制策略,该策略可以根据PLL输出角频率的偏差自适应调节系统的q轴电压,进而提高系统的暂态同步稳定能力。然而,考虑到正负序PLL在电网不对称故障期间的暂态行为存在耦合关系,上述控制策略可能无法适用。文献[21[22][23]-24]提出了电网不对称故障期间并网VSC的低电压故障穿越(Low Voltage Ride Through, LVRT)控制策略,上述方法充分利用了变流器的正负序有功无功电流支撑能力,但是没有考虑故障期间并网VSC的暂态同步稳定裕度,使得系统面临较大的暂态失稳风险。因此,有必要进一步考虑系统的正负序分离耦合关系以及暂态稳定能力,研究并网VSC在电网不对称故障期间的暂态同步稳定控制策略,以降低系统的暂态同步失稳风险。
为了填补现有文献的研究空白,本文考虑并网VSC非线性多时间尺度控制特性,建立了基于正负序分离的正负序PLL非线性暂态模型,刻画了系统正负序PLL的控制耦合行为。进一步基于等面积法,构建了并网VSC在电网不对称故障下的暂态稳定判据,基于该方法分析了不同正负序PLL比例积分系数,以及故障期间不同的故障穿越指令对系统正负序等效功角的影响规律。此外,为了提高可再生能源并网变流器在电网不对称故障下的暂态同步稳定性,分别从改进正负序PLL控制参数,以及优化LVRT指令两方面提出了电网不对称故障下并网VSC暂态同步稳定增强控制策略。最后进行了仿真和实验验证。
由于VSC被广泛应用于永磁同步风电机组、光伏电站等全功率型可再生能源发电装备的并网接口,本文以并网VSC为例,研究可再生能源发电系统在电网不对称故障下的暂态稳定性。此外,考虑到全功率型发电装备不与电网直接连接,而是通过大容量的直流电容与电网隔离,机侧变流器的暂态行为对系统暂态稳定性的影响可以忽略[14]。因此,本文将主要探究网侧变流器的电流输出外特性对系统暂态同步稳定性的影响。
图1为电网不对称故障下跟网型并网VSC控制框图。图1中,Ut为VSC的机端电压,Ug为电网电压,Zg为公共传输线路阻抗,ZL为传输线路阻抗。本文中,各物理量的上标“+”“-”表示正负序分量,下标为d(q)+(-)表示参考坐标系坐标轴。在故障发生前,VSC采用最大功率点跟踪(Maximum Power Point Tracing, MPPT)控制模式(Flag = 1),当故障电压(Ugf)被检测到,VSC采用电流环控制(Flag = 2),实现正、负序有功无功电流的快速注入。
图1 在电网不对称故障下的并网VSC控制框图
Fig.1 Control block digram of grid-connected VSC under asymmetric grid faults
图2为跟网型并网VSC在不同电网不对称故障类型下的序网络,其中,ZF为接地阻抗,VSC系统提供的正序电流和负序电流可分别等效为频率为 和
和 的可控电流源
的可控电流源 与
与 ,电网故障期间,VSC向电网注入的正负序电流为
,电网故障期间,VSC向电网注入的正负序电流为
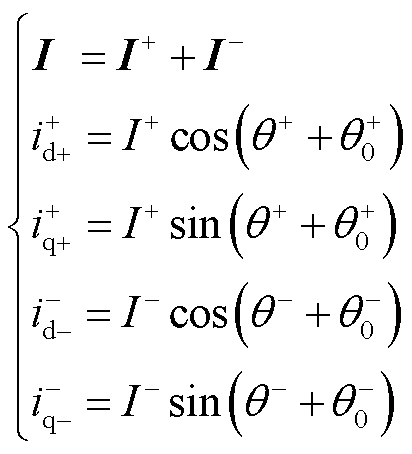 (1)
(1)
式中, 为
为 在dq+坐标系下的角度;
在dq+坐标系下的角度; 为
为 在dq-坐标系下的角度;q +为dq+与ab之间的角度;
在dq-坐标系下的角度;q +为dq+与ab之间的角度; 为dq-与ab之间的角度。
为dq-与ab之间的角度。
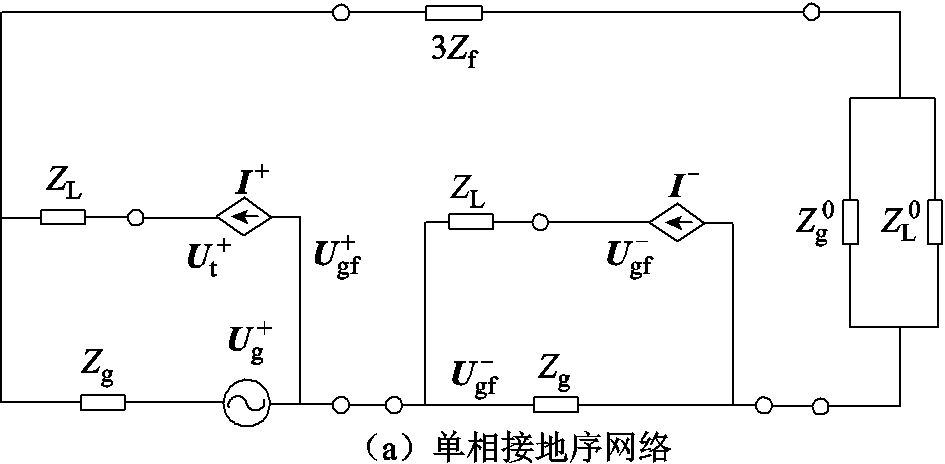
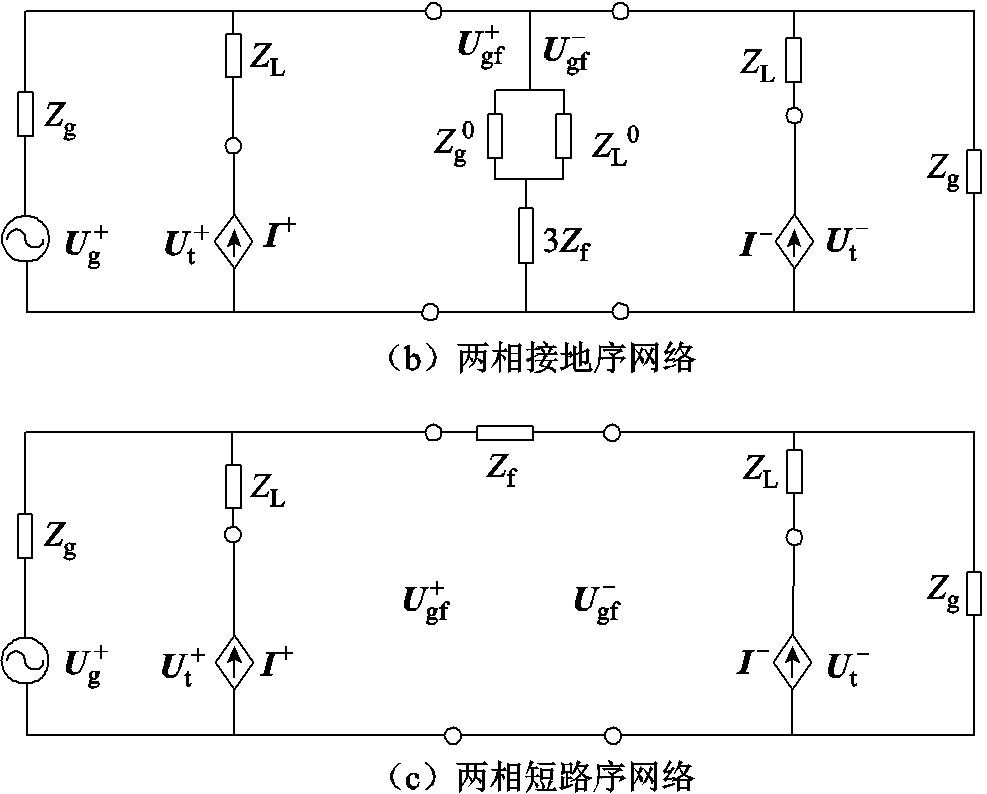
图2 并网VSC在不同不对称故障类型下的序网络
Fig.2 Sequential network of grid-connected VSC under different types of asymmetric faults
以电网单相接地短路故障为例,根据图2中的序网络,可得故障点电压正负序分量为
 (2)
(2)
式中,K1、K2、Z1、Z2、Z3、Z4的详细表达式见附录。
进一步可得机端电压正负序分量( ,
, )为
)为
 (3)
(3)
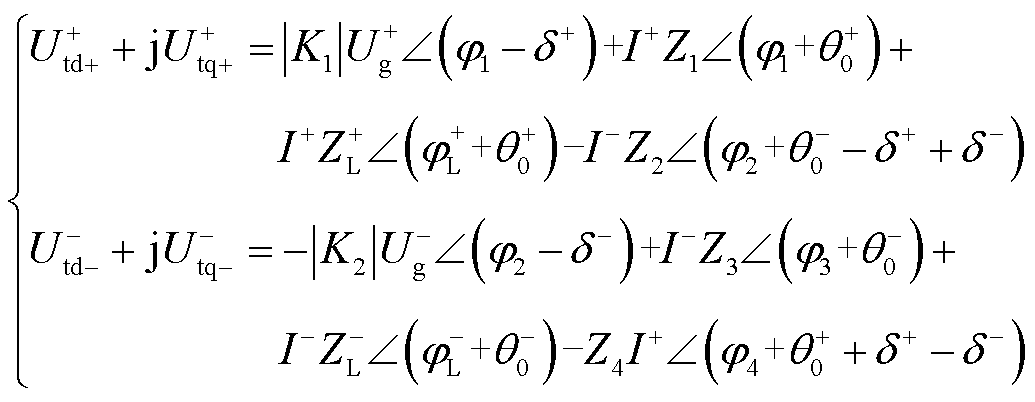
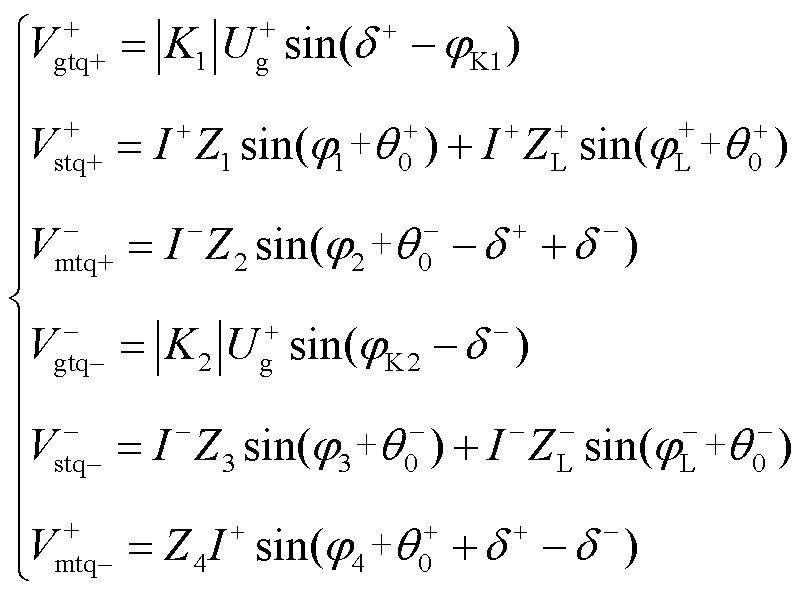
进一步结合式(2),并将式(3)变换到图3所示的坐标系下,可得系统正负序机端电压为
 (4)
(4)
式中,δ+为 和
和 之间的角度;d-为和
之间的角度;d-为和 之间的角度;
之间的角度; 和
和 为
为 和
和 的相位;|K1|和|K2|分别为K1和K2的幅值;
的相位;|K1|和|K2|分别为K1和K2的幅值; 和
和 分别为K1和K2的相位;
分别为K1和K2的相位; 为Zi的相位 (i=1,2,3,4) 。
为Zi的相位 (i=1,2,3,4) 。
进一步结合式(4),可以得到正负序机端电压q轴分量表达式为
 (5)
(5)
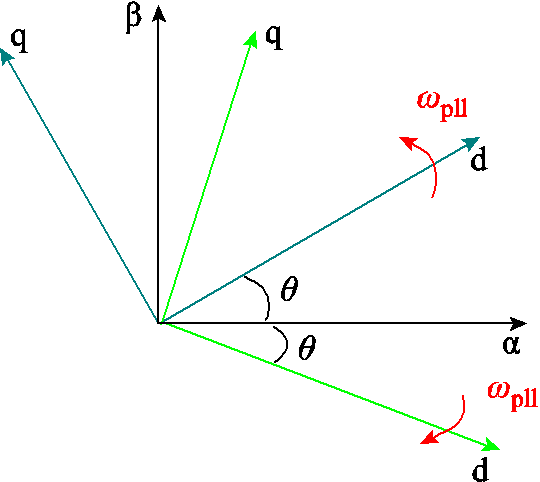
图3 正负序dq±参考坐标系
Fig.3 Positive and negative sequence dq±frames
其中
 (6)
(6)
从式(5)可以看出,故障期间系统正负序机端电压q轴分量 和
和 均由三部分构成。其中,
均由三部分构成。其中, 和
和 分别反映了电网电压的运行状态对系统暂态同步特性的影响,因此可以分别定义为正序电网电压同步电势和负序电网电压同步电势;
分别反映了电网电压的运行状态对系统暂态同步特性的影响,因此可以分别定义为正序电网电压同步电势和负序电网电压同步电势; 和
和 分别反映了系统正序分量和负序分量的暂态同步行为,因此可以分别定义为系统的正序自同步电势和负序自同步电势;
分别反映了系统正序分量和负序分量的暂态同步行为,因此可以分别定义为系统的正序自同步电势和负序自同步电势; 和
和 分别反映了系统负序分量对正序分量暂态同步特性的影响,以及正序分量对负序分量暂态同步特性的影响,因此可以分别定义为负序耦合电动势和正序耦合电势。
分别反映了系统负序分量对正序分量暂态同步特性的影响,以及正序分量对负序分量暂态同步特性的影响,因此可以分别定义为负序耦合电动势和正序耦合电势。
由于在电网不对称故障期间,系统正负分量具有截然不同的暂态行为[14],并且为了抑制高频谐波和噪声,本文建立了如图4所示的基于移动平均滤波器(Moving Average Filter, MAF)的正负序PLL模型[25]。图4中, 、
、 分别为正序锁相环PI控制器的比例和积分系数;
分别为正序锁相环PI控制器的比例和积分系数; 、
、 分别为负序锁相环PI控制器的比例和积分系数;ωg为电网额定角频率。
分别为负序锁相环PI控制器的比例和积分系数;ωg为电网额定角频率。
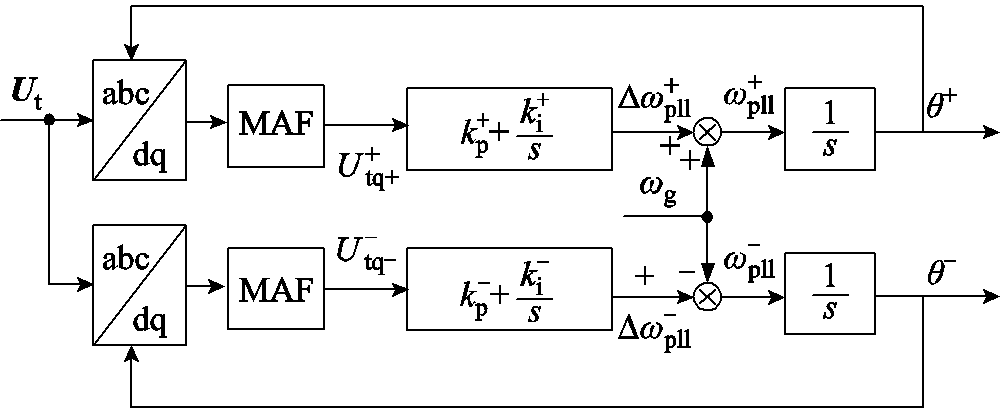
图4 正负序PLL控制结构
Fig.4 PLL control structure based on positive and negative sequence separation
由文献[14]可知,正负序PLL的控制方程为
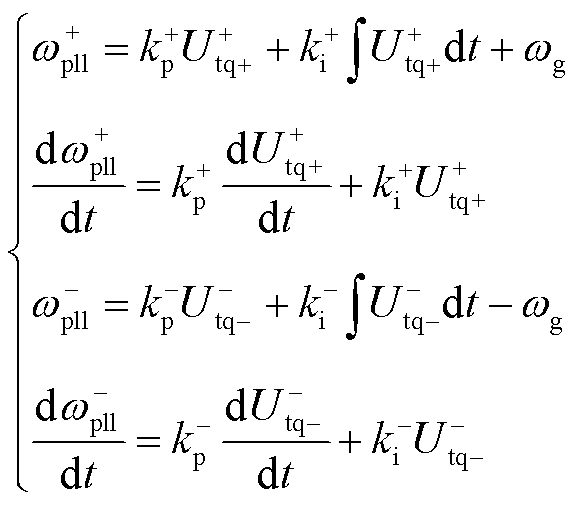 (7)
(7)
将式(5)代入式(7),可以得到跟网型VSC并网系统在电网不对称故障下的正负序非线性暂态模型为
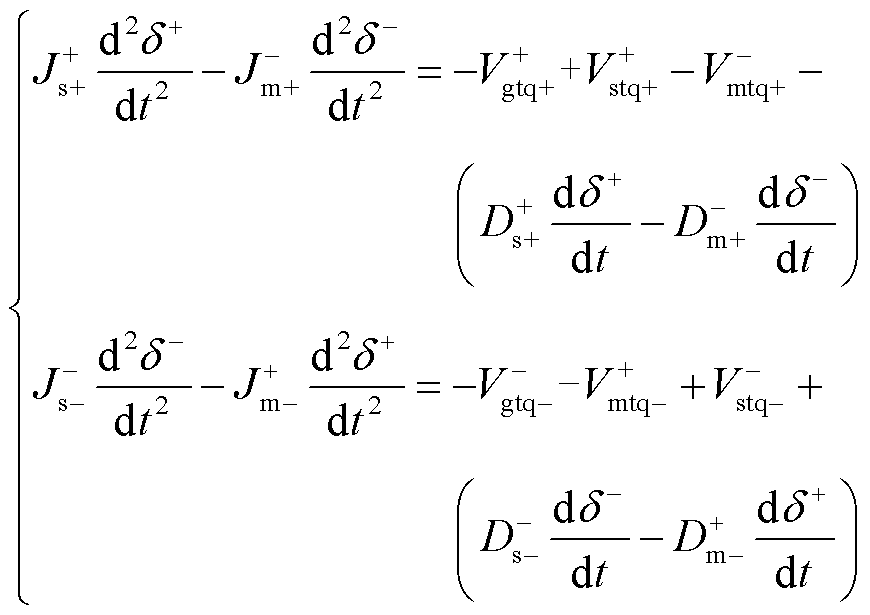 (8)
(8)
式中, 和
和 分别为正序自同步惯量系数和负序自同步惯量系数;
分别为正序自同步惯量系数和负序自同步惯量系数; 和
和 分别为负序耦合惯量系数和正序耦合惯量系数;
分别为负序耦合惯量系数和正序耦合惯量系数; 和
和 分别为正序自同步阻尼系数和负序自同步阻尼系数;
分别为正序自同步阻尼系数和负序自同步阻尼系数; 和
和 分别为负序耦合阻尼系数和正序耦合阻尼系数。
分别为负序耦合阻尼系数和正序耦合阻尼系数。
由式(5)~式(7)可得图5所示的电网不对称故障期间VSC并网系统正负序PLL耦合控制模型。从图5可以看出,电网不对称故障期间VSC单机并网系统正负序分量之间存在错综复杂暂态交互行为,使得系统在电网不对称故障下的暂态稳定特性远比对称故障更加复杂。考虑到目前对于新能源发电系统正负序分量在电网不对称故障下的暂态同步行为缺乏系统性的认识,本文将在第2节深入探究故障期间正负序PLL之间的控制耦合行为,进而为研究系统的稳定控制策略提供理论依据。
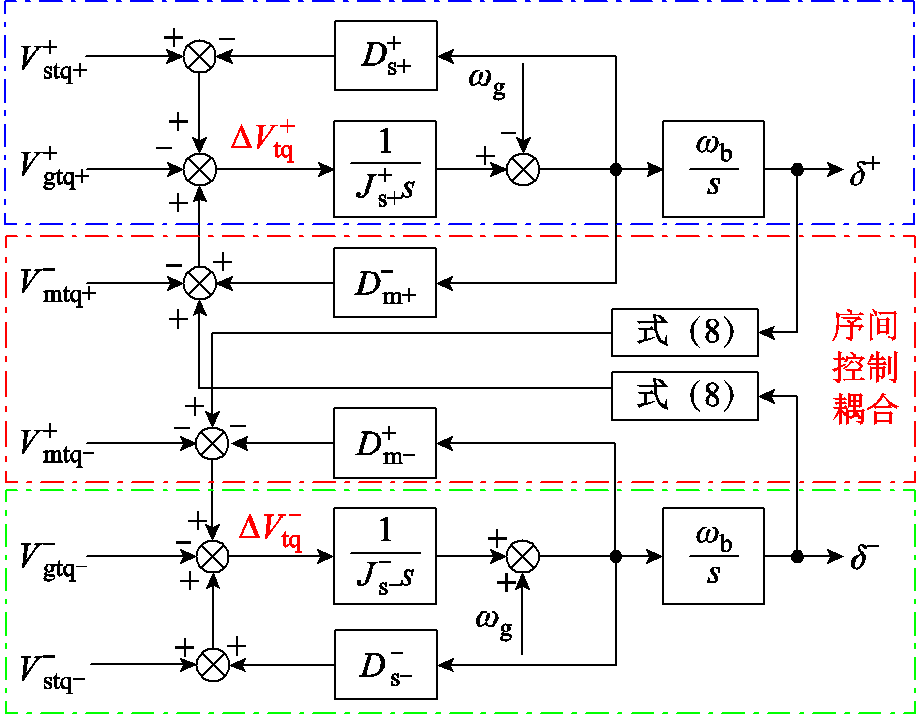
图5 电网不对称故障期间正负序PLL控制耦合模型
Fig.5 The coupling control model of positive and negative sequence PLL during asymmetric grid faults
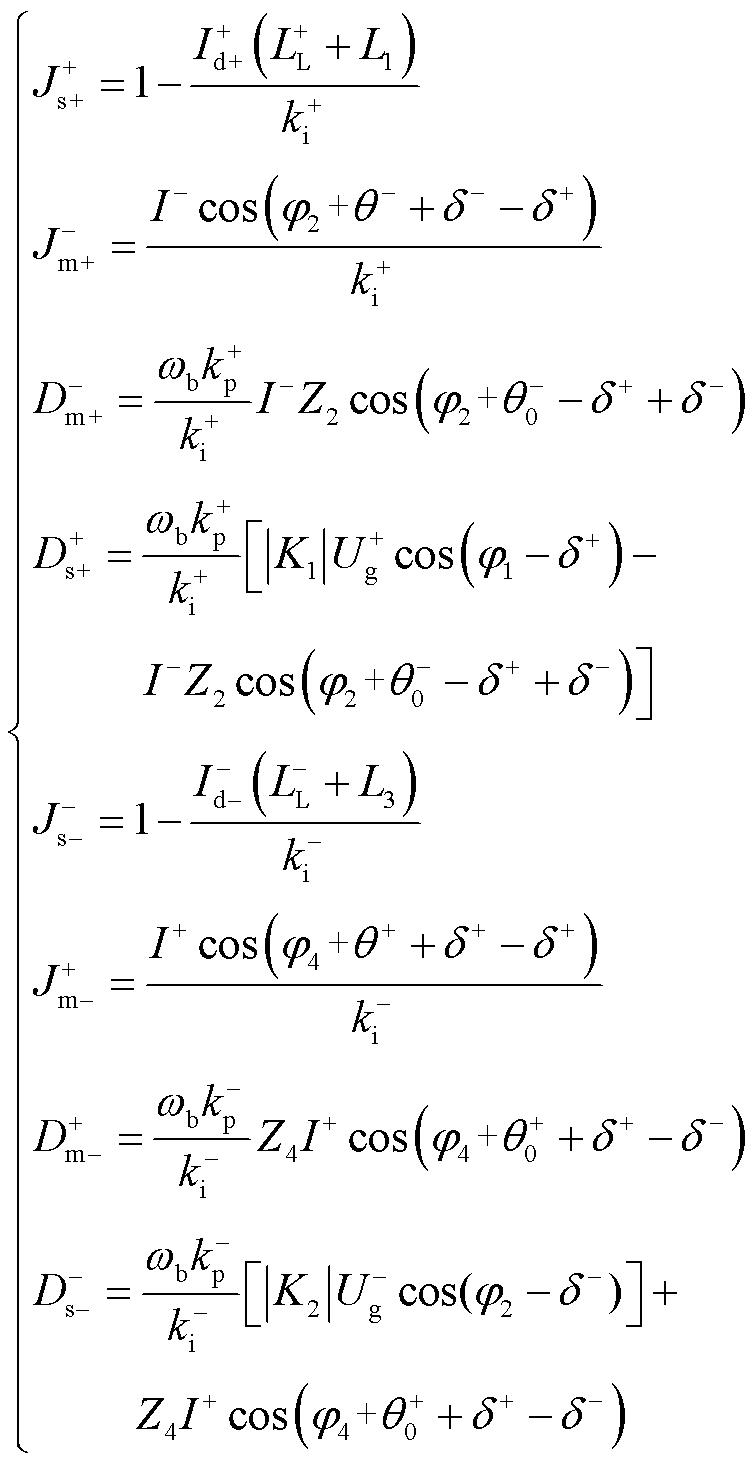 (9)
(9)
式中, 和
和 分别为正、负序传输线路等值电感;L1、L2、L3、L4分别为Z1、Z2、Z3、Z4的等值电感;ωb为角频率基值。
分别为正、负序传输线路等值电感;L1、L2、L3、L4分别为Z1、Z2、Z3、Z4的等值电感;ωb为角频率基值。
由第1节分析可知,电网不对称故障期间,系统正负序PLL的暂态行为之间存在耦合关系,使系统在电网不对称故障期间的暂态同步特性远比系统在电网对称故障下的暂态特性复杂。因此,本节将基于第1节建立的并网VSC正负序PLL的暂态控制耦合模型,探究正负序分量之间的交互特性对系统暂态稳定性的影响规律,揭示系统正负序PLL的暂态同步失稳机理,研究适用于量化分析电网不对称故障下新能源发电系统暂态同步稳定性的方法,从而进一步研究新能源并网系统在电网不对称短路故障下的暂态稳定控制策略。
根据式(8)以及图5可知,当电网发生不对称短路故障时,电网电压运行状态的改变将导致 和
和 发生突变,进而打破正负序机端电压q轴分量的电势平衡。此时,系统正负序不平衡电势
发生突变,进而打破正负序机端电压q轴分量的电势平衡。此时,系统正负序不平衡电势 和
和 将会驱动
将会驱动 以及增加或减小,使得δ+和δ-发生改变,进而抑制
以及增加或减小,使得δ+和δ-发生改变,进而抑制 和
和 的改变。与此同时,为了消除
的改变。与此同时,为了消除 和
和 ,并快速向电网提供正负序有功无功电流支撑,VSC将切换到LVRT控制模式,导致机端电压的
,并快速向电网提供正负序有功无功电流支撑,VSC将切换到LVRT控制模式,导致机端电压的 和
和 发生改变。在此期间,由于系统正负序阻抗网络相互连接,VSC输出的正序有功无功电流不仅会影响,还会在阻抗网络的耦合作用下影响
发生改变。在此期间,由于系统正负序阻抗网络相互连接,VSC输出的正序有功无功电流不仅会影响,还会在阻抗网络的耦合作用下影响 ;同理,VSC输出的负序有功无功电流不仅会影响,还会在阻抗网络的耦合作用下影响
;同理,VSC输出的负序有功无功电流不仅会影响,还会在阻抗网络的耦合作用下影响 ,并导致和发生变化,驱使δ+和δ-进一步增加或者减小。此外,δ+暂态行为的改变不仅会影响,还会在阻抗网络的作用下影响;同理,δ-暂态行为的改变不仅会影响,也会影响。最终,若系统正负序PLL能够通过调整δ+和δ-消除和,系统将会在故障期间重新恢复暂态同步稳定;否则系统将会发生暂态失稳。
,并导致和发生变化,驱使δ+和δ-进一步增加或者减小。此外,δ+暂态行为的改变不仅会影响,还会在阻抗网络的作用下影响;同理,δ-暂态行为的改变不仅会影响,也会影响。最终,若系统正负序PLL能够通过调整δ+和δ-消除和,系统将会在故障期间重新恢复暂态同步稳定;否则系统将会发生暂态失稳。
由于系统正负序分量之间存在显著的控制耦合行为,基于电网对称短路故障场景制定的暂态失稳判据难以直接适用于不对称短路故障场景。因此,本节将分别从平衡点存在性和暂态能量平衡角度刻画新能源发电系统在电网不对称短路故障下的暂态失稳边界。
由2.1节分析可知,只有完全消除了机端电压正负序q轴不平衡电势,U + tq+和U – tq-才可以被正负序PLL控制到0;否则,不平衡电势将会驱动等效功角持续增大或者减小,进而造成系统发生暂态同步失稳。因此,式(5)需要满足
 (10)
(10)
由于只有当正负序电网电压同步电势、自同步电势以及耦合电势相交时,式(10)才能成立。考虑到电网同步电势主要由电网的运行状态决定,而正负序自同步电势和耦合电势与VSC输出的正负序有功无功电流以及电网阻抗密切相关。此外,在电网故障位置和故障程度确定的情况下系统的阻抗是不可改变的。因此,式(10)是否成立主要取决于VSC输出的正负序电流。此时,VSC输出的正负序电流需要满足
 (11)
(11)
式中,上标为“*”为正负序指令值。
 (12)
(12)
如果故障期间VSC输出的正负序有功无功电流无法满足式(10),则意味着正负序电网同步电势、自同步电势以及耦合电势不存在交点,正负序机端电压q轴不平衡电势将无法被消除。此时,正负序PLL将会因平衡点缺失而发生暂态同步失稳。考虑到系统正负序平衡点存在的条件下,故障期间发电装备不恰当的非线性控制行为也可能造成正负序PLL因加减速面积不匹配而发生暂态同步失稳。因此,有必要对系统在故障期间的暂态能量变换进行深入探究。
将式(8)两边同时乘以时间单元dt,可以得到
 (13)
(13)
式中,t0为故障初始时刻。
将式(13)两边对t进行积分可以得到
 (14)
(14)
式中, 和
和 分别为正、负序等效功角的初始角度。
分别为正、负序等效功角的初始角度。
结合式(8),并参考同步发电机的功角特性曲线,可以得到并网VSC在电网不对称短路故障下的正负序电势-功角特性曲线。考虑到现有故障检测方法存在一定的故障检测延时,因此可以将系统的正负序工作点运动轨迹分为故障检测阶段的运动轨迹和故障持续阶段的运动轨迹,下面将分别探究这两个阶段系统暂态能量的转换过程。
1)阶段1:故障检测阶段的能量转换关系
由于在故障检测阶段系统仍采用MPPT控制策略,此时,系统仅向电网注入正序有功电流为
 (15)
(15)
式中,P* n为故障发生前的有功指令;Im为网侧变流器的电流阈值。
当系统检测到电网电压的跌落后,系统将采用LVRT策略。此时,系统输出的正负序有功无功电流[26]为
 (16)
(16)
将式(10)和式(11)代入式(9),可以得到如图6所示的故障检测阶段正负序工作点的运动轨迹。图6中, 和
和 分别为故障检测阶段的电流指令与电网阻抗产生的正、负序q轴等效电势;
分别为故障检测阶段的电流指令与电网阻抗产生的正、负序q轴等效电势; 和
和 分别为故障持续阶段的电流指令与电网阻抗产生的正、负序q轴等效电势。故障初始时刻对应的正负序功角为
分别为故障持续阶段的电流指令与电网阻抗产生的正、负序q轴等效电势。故障初始时刻对应的正负序功角为 和。系统检测到故障时对应的正负序功角为
和。系统检测到故障时对应的正负序功角为 和
和 。
。 和
和 分别为正负序工作点在
分别为正负序工作点在 和
和 时的功角。
时的功角。
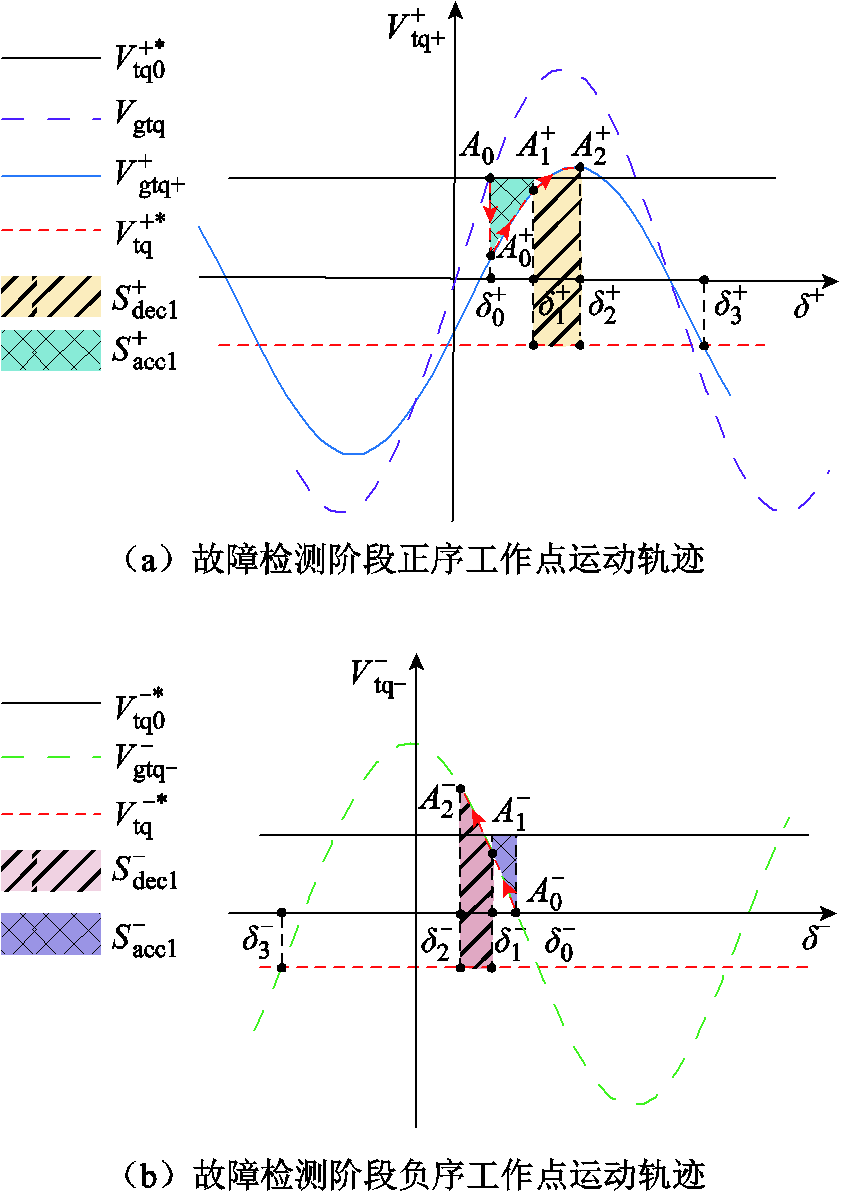
图6 故障检测阶段正负序电势-功角特性曲线
Fig.6 Positive and negative sequence potential-power angle characteristic curves in fault detection stage
从图6 a和图6b可知,正负序分量运行点分别在A+ 0A+ 1和A- 0A- 1阶段加速,对应的加速面积分别为ΔS+ acc1和ΔS- acc1,系统阻尼消耗的能量分别为ΔW+ D0和ΔW- D0。正负序分量运行点在A+ 1A+ 2和A- 1A- 2阶段减速,对应的减速面积分别为 和
和 ,系统阻尼消耗的能量分别为
,系统阻尼消耗的能量分别为 和
和 。只有δ+到达δ+ 3之前,以及δ-到达δ- 3之前,
。只有δ+到达δ+ 3之前,以及δ-到达δ- 3之前, 和
和 可以被恢复到同步速,系统正负序PLL才不会发生暂态同步失稳。因此,正负序分量运行点在电网故障检测阶段积累的加速能量需要不超过最大的减速能量,否则正负序PLL会因为减速面积不足而发生暂态同步失稳。此时,系统在故障期间的正负序无功电流需要满足
可以被恢复到同步速,系统正负序PLL才不会发生暂态同步失稳。因此,正负序分量运行点在电网故障检测阶段积累的加速能量需要不超过最大的减速能量,否则正负序PLL会因为减速面积不足而发生暂态同步失稳。此时,系统在故障期间的正负序无功电流需要满足
 (17)
(17)
其中
 (18)
(18)
式中, 和
和 分别为故障初始阶段的正、序自同步阻尼和耦合阻尼系数;
分别为故障初始阶段的正、序自同步阻尼和耦合阻尼系数; 和
和 分别为故障检测阶段的正、序自同步阻尼和耦合阻尼系数;
分别为故障检测阶段的正、序自同步阻尼和耦合阻尼系数; 和
和 分别为故障检测阶段的负序自同步阻尼和耦合阻尼系数。
分别为故障检测阶段的负序自同步阻尼和耦合阻尼系数。
2)阶段2:故障持续阶段的能量转换关系
故障持续阶段正负序电势-功角特性曲线如图7所示。图7中, 和
和 为不稳定正负序功角,
为不稳定正负序功角, 和
和 为稳定正负序功角,
为稳定正负序功角, 和
和 分别为正负序工作点在
分别为正负序工作点在 和
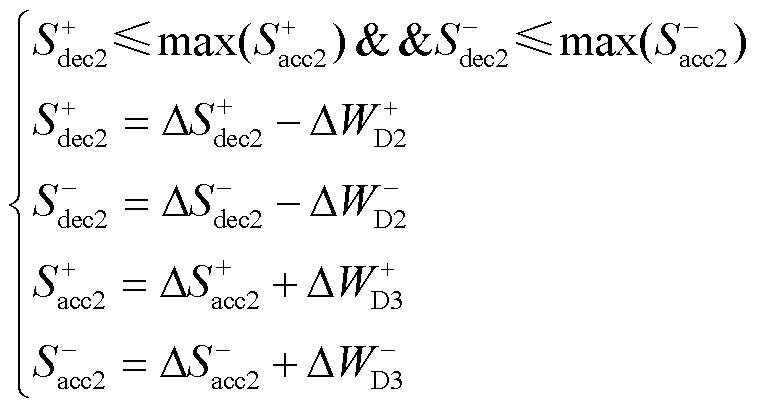
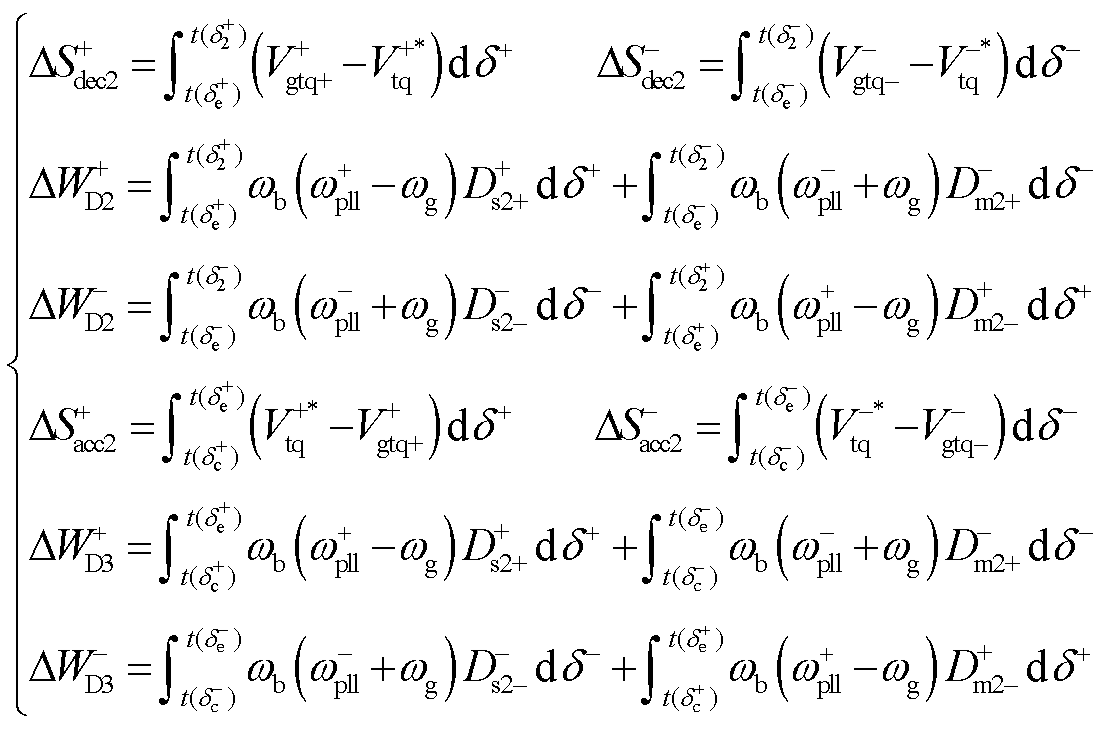
和 时的功角。从图7 a可以看到,在 A+ 2A+ 3阶段,ΔV + tq将会驱动和δ+减小,对应的减速面积和阻尼能量分别为S+ dec2和W+ D2。在A+ 3A+ 4阶段,ΔV + tq将会通过驱动δ+减小,正序系统的加速面积和阻尼能量分别为S+ acc2与W+ D3。在
时的功角。从图7 a可以看到,在 A+ 2A+ 3阶段,ΔV + tq将会驱动和δ+减小,对应的减速面积和阻尼能量分别为S+ dec2和W+ D2。在A+ 3A+ 4阶段,ΔV + tq将会通过驱动δ+减小,正序系统的加速面积和阻尼能量分别为S+ acc2与W+ D3。在 阶段,ΔV- tq将会驱动和δ-的绝对值减小,对应的减速面积和阻尼消耗的能量分别为S- dec2与W- D2。在
阶段,ΔV- tq将会驱动和δ-的绝对值减小,对应的减速面积和阻尼消耗的能量分别为S- dec2与W- D2。在 阶段,
阶段, 将会驱动
将会驱动 的绝对值增大。在此阶段,负序工作点的加速面积和阻尼消耗的能量分别为
的绝对值增大。在此阶段,负序工作点的加速面积和阻尼消耗的能量分别为 与
与 。为了使正负序功角不发生暂态失稳,系统在电网故障期间输出的正负序有功无功电流需要满足
。为了使正负序功角不发生暂态失稳,系统在电网故障期间输出的正负序有功无功电流需要满足
 (19)
(19)
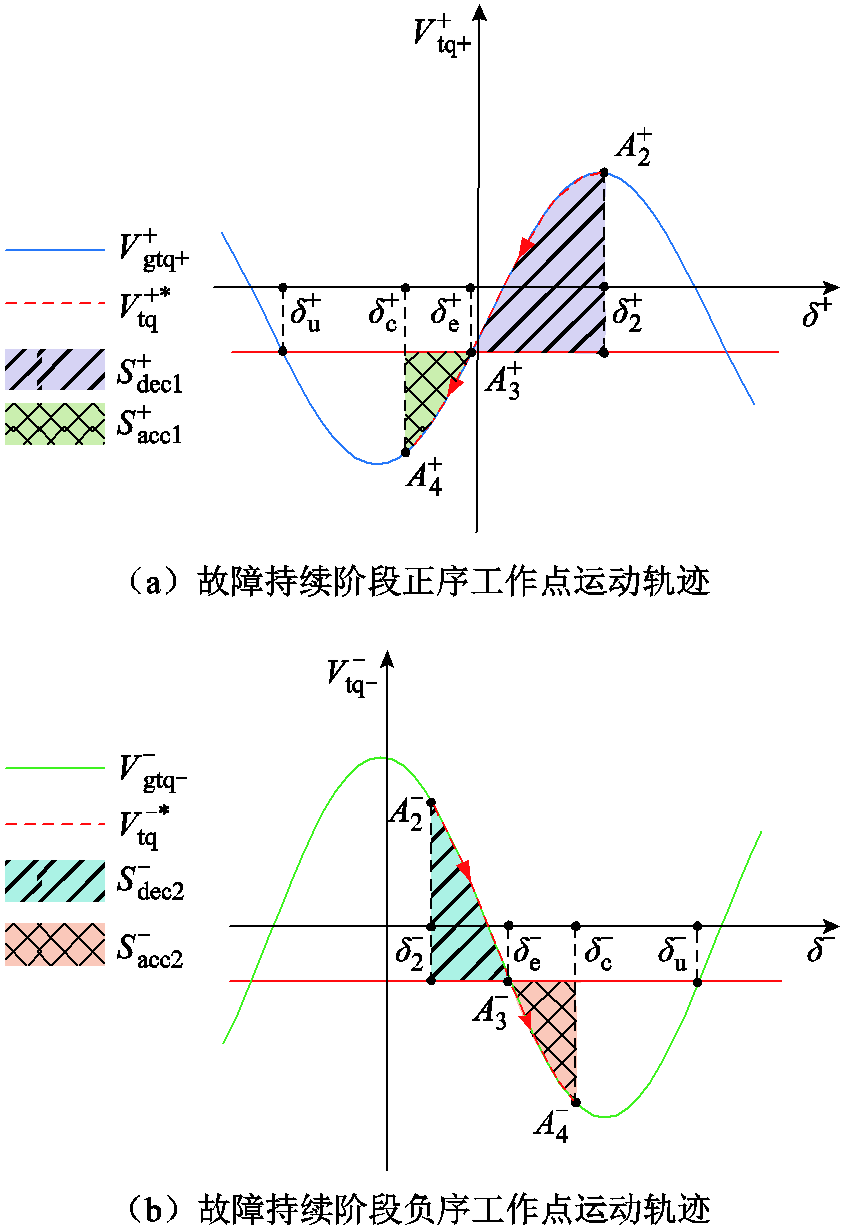
图7 故障持续阶段正负序电势-功角特性曲线
Fig.7 Positive and negative sequence potential-power angle characteristic curves in fault duration stage
 (20)
(20)
式中, 和
和 分别为故障持续阶段的正序自同步阻尼和耦合阻尼系数;
分别为故障持续阶段的正序自同步阻尼和耦合阻尼系数; 和
和 分别为故障持续阶段的负序自同步阻尼和耦合阻尼系数。
分别为故障持续阶段的负序自同步阻尼和耦合阻尼系数。
电网不对称故障期间系统输出的正负序有功无功电流只有满足式(19),正负序工作点在故障持续期间的等效势能才能完全补偿释放的等效动能,否则正负序PLL会因为在故障持续期间的加速面积不足而发生降频失步。
由2.2节的分析可知,正负序等效功角故障期间暂态能量转换过程与同步机类似,故障期间的不平衡能量将导致系统正序PLL发生暂态同步失稳。由式(17)和式(19)可知,系统在故障期间的暂态能量与故障检测延时tdelay、正负序无功电流指令、正负序PLL比例积分系数等密切相关,为了进一步探究电网不对称故障期间正负序耦合控制特性对系统暂态同步稳定性的影响规律,本节将基于2.2节所提出的稳定判据以及表1中列出的VSC单机并网系统的仿真参数,探究单相接地故障条件下临界故障切除时间、正序无功电流指令、正序PLL比例积分系数等因素对系统的暂态同步稳定性的影响。考虑到故障期间正序PLL需要具有较强的抗干扰能力,而负序PLL需要快速跟踪负序电网电压,从而抑制负序分量,因此,本文正负序PLL采用不同控制参数,使得正负序PLL具有不同的动态性能和抗干扰能力。
图8给出了不同故障检测延时下正负序等效功角的相轨迹。其中,故障前系统提供1 (pu)的正序有功电流,故障持续期间提供0.2(pu)的正序无功电流和0.2 (pu)的负序无功电流。此时,根据式(17)和式(19)可以得到表2所示的不同故障检测延时下系统积累的不平衡暂态能量。从图8和表2可以看出,随着故障检测时间的增加,系统在阶段1积累的不平衡加速能量逐渐增加,在阶段1的最大减速能量逐渐减小。当tdelay=15 ms时,系统积累的不平衡加速能量S+ acc1超过最大减速能量max(S+ dec1),导致δ+发生了如图8所示的暂态同步失稳现象。值得注意的是,尽管在此期间S- acc1<max(S- dec1),但是在阻抗网络的作用下,δ-也发生了振荡失稳,该仿真结果也验证了正负序分量之间的控制耦合特性。
表1 并网VSC仿真参数
Tab.1 Parameters of the simulation grid-connection VSC
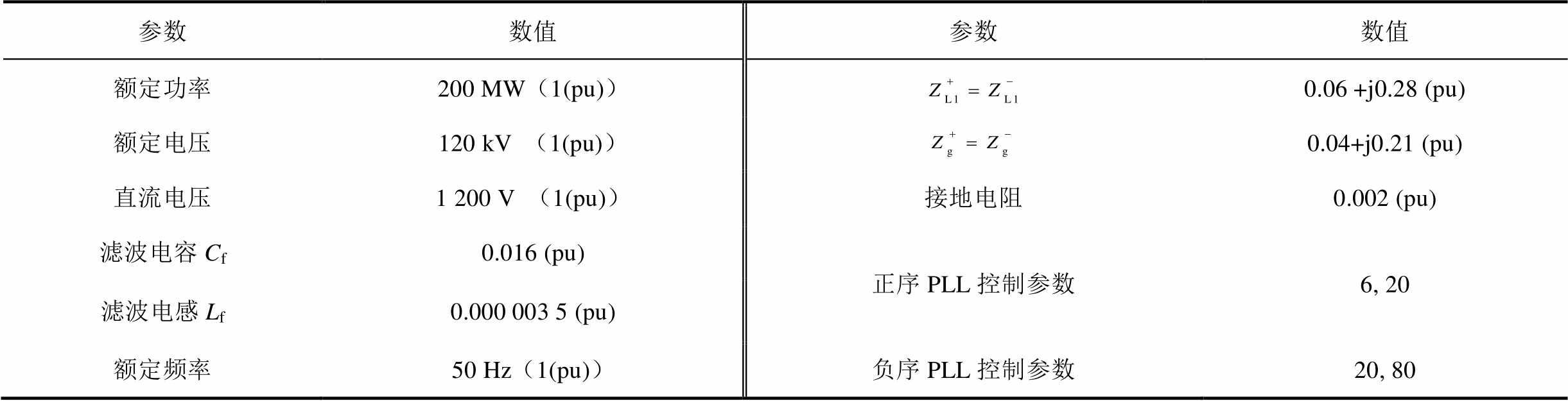
参数数值参数数值 额定功率200 MW(1(pu))0.06 +j0.28 (pu) 额定电压120 kV (1(pu))0.04+j0.21 (pu) 直流电压1 200 V (1(pu))接地电阻0.002 (pu) 滤波电容Cf0.016 (pu)正序PLL控制参数6, 20 滤波电感Lf0.000 003 5 (pu) 额定频率50 Hz(1(pu))负序PLL控制参数20, 80
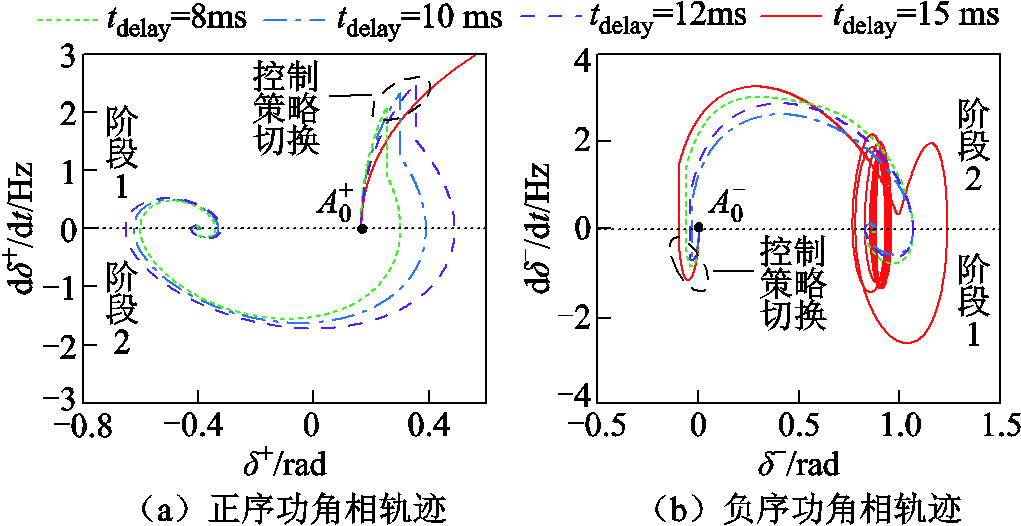
图8 不同检测延时下系统正负序等效功角的相轨迹
Fig.8 Phase trajectories of positive and negative sequence equivalent power angle under different detection delays
表2 不同临界故障切除时间下的稳定性分析结果
Tab.2 Stability analysis results under different critical fault removal time

tdelay/s阶段1阶段2系统状态 80.2350.8210.0860.3450.2730.6170.2620.426稳定 100.3640.6530.0920.3360.4250.6170.2750.426稳定 120.5250.5710.1050.3270.5370.6170.2830.426稳定 150.6960.3580.1170.315————失稳
图9给出了不同正序无功电流指令下正负序等效功角的相轨迹。其中,故障检测延时为10 ms,故障持续期间的负序无功电流为0.2(pu)。此时,表3给出了不同正序无功电流指令下系统积累的不平衡暂态能量。从图9和表3可以看出,随着故障期间系统提供的正序无功电流的增加,系统在阶段1的最大减速能量都得到了增加,这意味着系统在故障检测阶段可以承受更大的不平衡加速能量,系统在阶段1的暂态同步稳定性得到了提高。然而,随着系统提供的正序无功电流的增加,系统在阶段2的最大加速能量逐渐减小,使得系统在阶段2的暂态同步稳定性降低,最终发生暂态同步失稳。
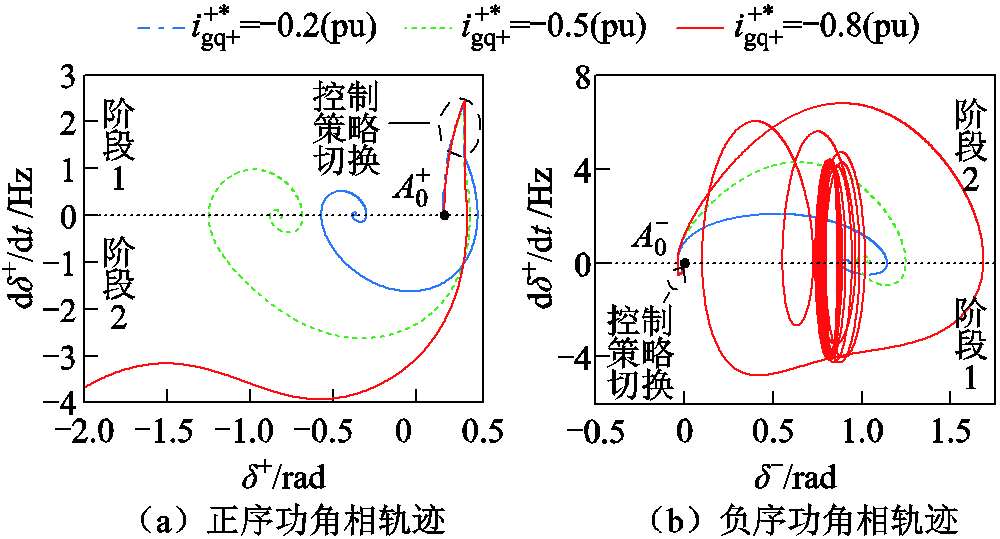
图9 不同正序无功电流指令下正负序等效功角相轨迹
Fig.9 Phase trajectories of positive and negative sequence equivalent power angle under different positive sequence reactive current references
表3 不同正序无功电流指令下的稳定性分析结果
Tab.3 Stability analysis results under different positive sequence reactive current references

阶段1阶段2系统状态 -0.20.3640.6530.0920.3360.4250.6170.2750.426稳定 -0.50.3640.7460.0920.3520.5420.5730.2910.407稳定 -0.80.3640.8620.0920.3790.7760.3420.3160.382失稳
图10和图11分别给出了不同正序PLL比例和积分系数下正负序等效功角的相轨迹。表4和表5分别给出了不同正序PLL比例和积分系数下系统积累的不平衡暂态能量。其中,故障检测延时为10 ms,故障持续期间的正序和负序无功电流均为0.2(pu)。从图10和图11可以看到,随着正序PLL比例系数的增大或者积分系数的减小,系统在阶段1的正序最大减速能量和阶段2的最大加速能量逐渐增加,使得系统正序PLL的暂态同步稳定性得到了提高。此外,在序间控制耦合作用下,增大正序PLL比例系数或者减小正序PLL积分系数,阶段1和阶段2负序系统积累的不平衡暂态能量也得到了抑制,提高了负序PLL的暂态同步稳定性。
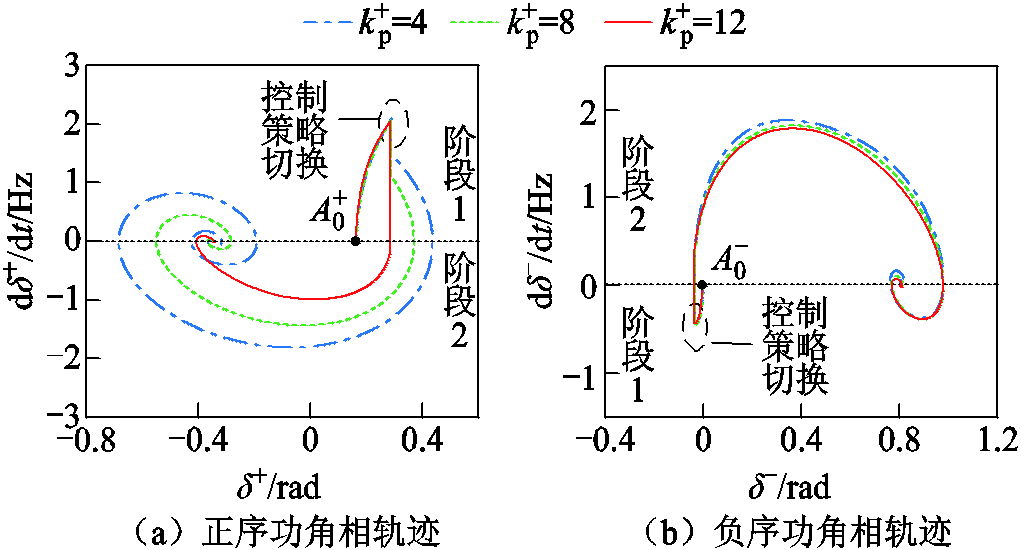
图10 不同正序PLL比例系数下正负序等效功角相轨迹
Fig.10 Phase trajectories of positive and negative sequence equivalent power angle under different proportional coefficient of positive sequence PLL
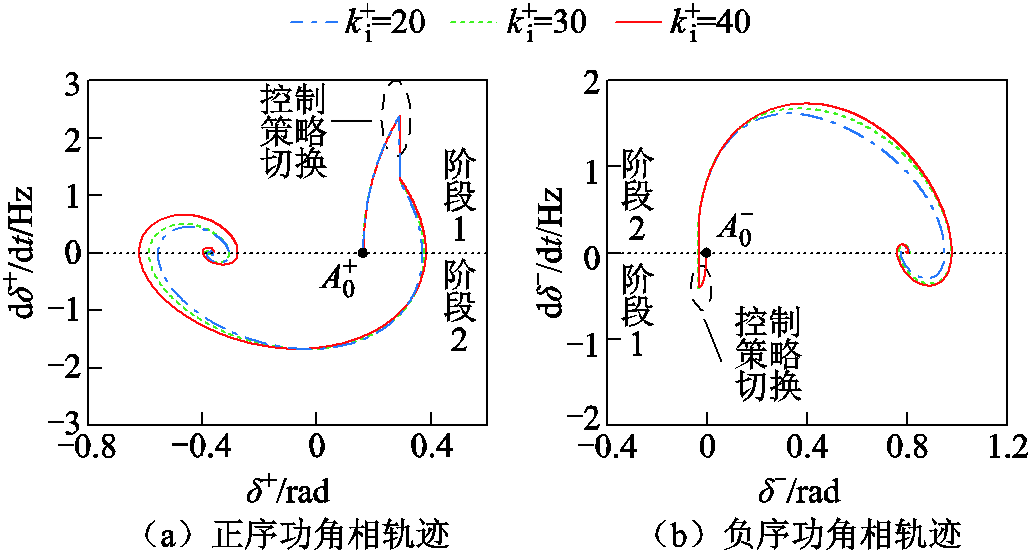
图11 不同正序PLL积分系数下正负序等效功角相轨迹
Fig.11 Phase trajectories of positive and negative sequence equivalent power angle under different integral coefficient of positive sequence PLL
表4 不同正序PLL比例系数下的稳定性分析结果
Tab.4 Stability analysis results under different proportional coefficient of positive sequence PLL

阶段1阶段2系统状态 40.3640.5970.0920.3280.4720.5590.2860.412稳定 80.3640.6530.0920.3360.4250.6170.2750.426稳定 120.3640.7740.0920.3450.3610.6760.2610.435稳定
表5 不同正序PLL积分系数下的稳定性分析结果
Tab.5 Stability analysis results under different integral coefficient of positive sequence PLL

阶段1阶段2系统状态 200.3640.7010.0920.3490.3740.6580.2640.435稳定 300.3640.6530.0920.3360.4250.6170.2750.426稳定 400.3640.6150.0920.3210.4920.5820.2890.413稳定
考虑到增加正负序PLL的比例系数或者减小积分系数[27-28]可以增加系统的阻尼在故障期间消耗的能量,进而减少系统不平衡能量的积累。为此,本文基于正负序PLL输出角频率的偏差(
 ,
, ),设计了如图12所示的改进正负序PLL控制策略。此时,系统的正负序PLL控制模型为
),设计了如图12所示的改进正负序PLL控制策略。此时,系统的正负序PLL控制模型为
 (21)
(21)
式中, 和
和 分别为正序角频率偏差比例和积分系数;
分别为正序角频率偏差比例和积分系数; 和
和 分别为负序角频率偏差比例和积分系数。
分别为负序角频率偏差比例和积分系数。
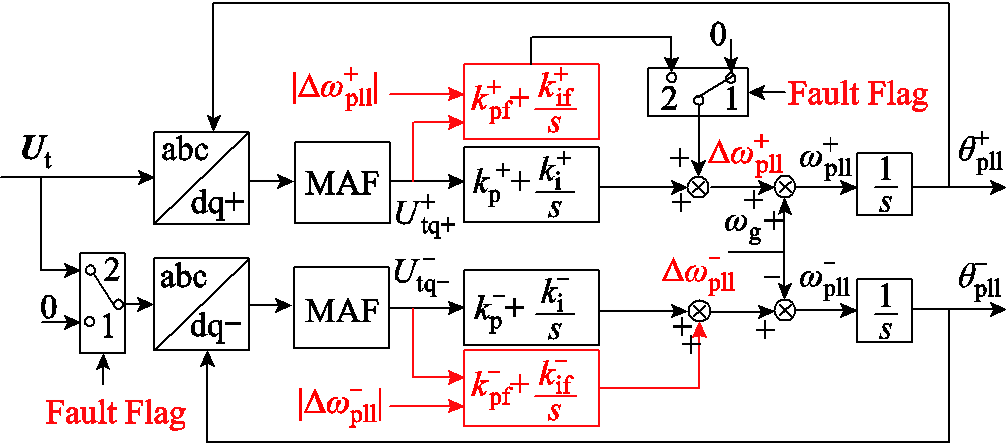
图12 改进正负序PLL控制结构
Fig.12 Improved control structure of positive and negative sequence PLL
由式(21)和图9可以看到,当系统正负序PLL输出角频率 和
和 不为0时,系统的正负序PLL将会根据和自适应调节正负序PLL的比例和积分系数,从而增强并网VSC在电网不对称故障期间的暂态同步稳定性;当和等于0时,正负序PLL的积分与比例系数将会恢复到故障前的状态。
不为0时,系统的正负序PLL将会根据和自适应调节正负序PLL的比例和积分系数,从而增强并网VSC在电网不对称故障期间的暂态同步稳定性;当和等于0时,正负序PLL的积分与比例系数将会恢复到故障前的状态。
进一步结合式(21),可以得到采用所提控制策略后系统的阻尼系数如式(22)所示。从式(22)可以看到,当采用所提控制策略后,系统将会根据Δω+ pll和Δω- pll自适应调节正负序PLL的比例和积分系数,从而增大系统的阻尼系数,抑制不平衡暂态能量的积累,进而增强并网VSC在电网不对称故障期间的暂态同步稳定性。
 (22)
(22)
为了验证理论分析的正确性以及所提控制策略的有效性,本节在Matlab/Simulink平台上搭建了图1所示的锁相同步型VSC并网系统时域仿真模型,并基于该模型进行了仿真验证,系统详细参数见表1。故障前并网VSC采用最大功率跟踪控制模式。在1 s时电网220 kV交流侧输电线路发生不对称短路故障,故障持续1 s后切除。
图13给出了单相接地故障下并网VSC采用不同控制策略时的仿真结果。图13中,Ufa为0.25(pu),故障检测延时为15 ms,故障期间系统首先按照电网导则输出正负序无功电流,剩余变流器电流容量输出正序有功电流。在此工况下,当系统采用传统控制策略时,计算得到系统在阶段1的不平衡暂态能量分别为
 。此时,
。此时, ,从图13可以看到,正负序PLL发生了暂态同步失稳现象。当系统采用所提正负序PLL改进控制策略后,计算得到系统在阶段1的加减速能量分别为
,从图13可以看到,正负序PLL发生了暂态同步失稳现象。当系统采用所提正负序PLL改进控制策略后,计算得到系统在阶段1的加减速能量分别为 [0.564 0.602 0.123 0.483]T;系统在阶段2的加减速能量分别为
[0.564 0.602 0.123 0.483]T;系统在阶段2的加减速能量分别为 =[0.612 0.718 0.465 0.525]T。从计算结果可以看到,系统在阶段1的正序最大减速面积得到了增加,使得系统在故障检测阶段积累的不平衡暂态能量可以得到补偿。如图13所示,正负序PLL在故障持续阶段未发生暂态同步失稳现象,并且系统在故障恢复阶段也可以快速恢复暂态同步稳定。由此可知,所提控制策略可以有效地提高VSC在电网不对称短路故障下的暂态同步稳定性,增强系统的不对称短路故障穿越能力。
=[0.612 0.718 0.465 0.525]T。从计算结果可以看到,系统在阶段1的正序最大减速面积得到了增加,使得系统在故障检测阶段积累的不平衡暂态能量可以得到补偿。如图13所示,正负序PLL在故障持续阶段未发生暂态同步失稳现象,并且系统在故障恢复阶段也可以快速恢复暂态同步稳定。由此可知,所提控制策略可以有效地提高VSC在电网不对称短路故障下的暂态同步稳定性,增强系统的不对称短路故障穿越能力。
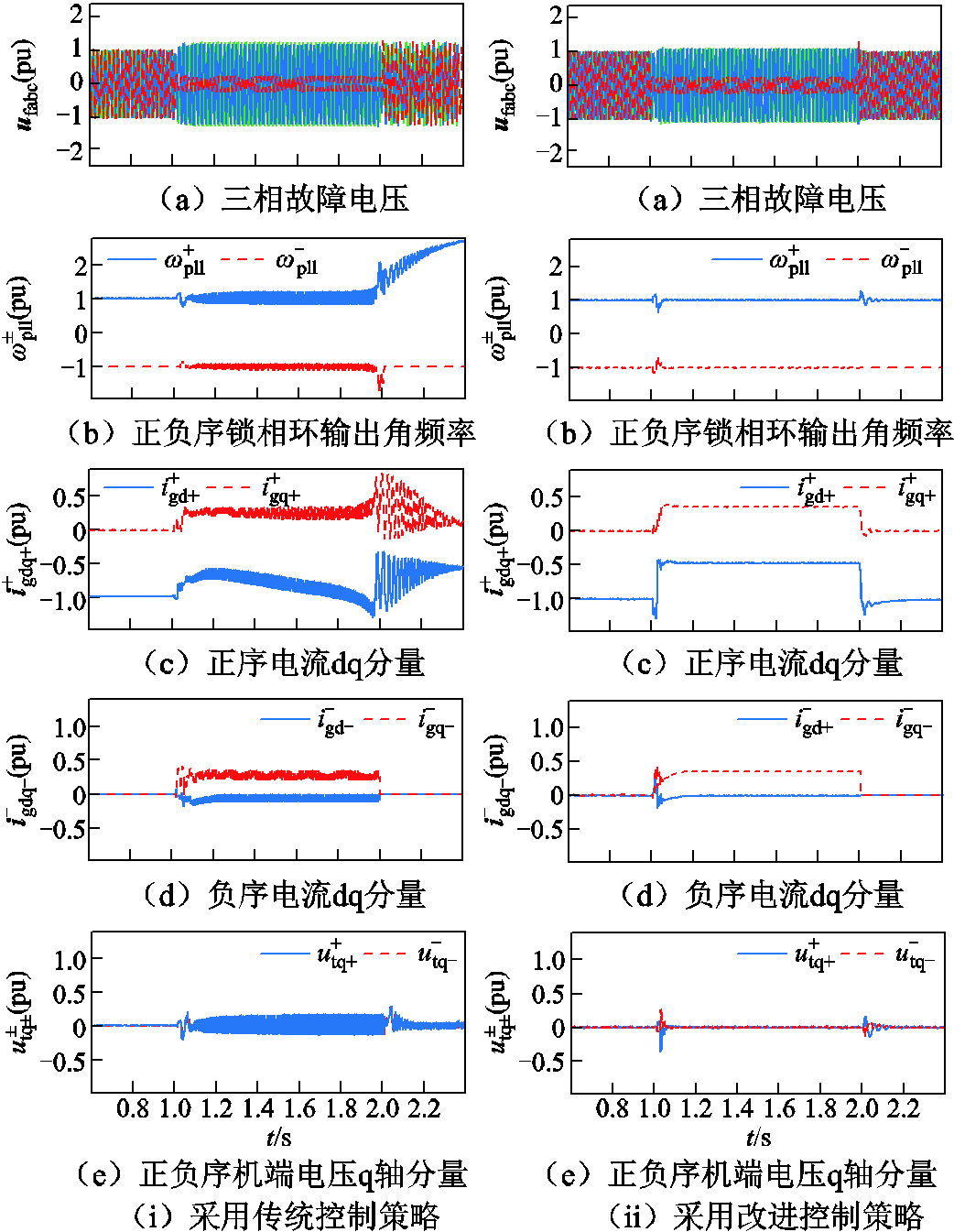
图13 并网VSC在不同控制策略下的仿真结果
Fig.13 Simulation results of grid-connected VSC under different control strategies
此外,为了进一步探究本节所提正负序PLL改进控制策略在不同电网不对称短路故障类型下的适应性,图14和图15进一步给出了两相接地故障以及相间短路故障下系统采用不同控制策略时的仿真结果。其中,系统的故障检测延时为15 ms。从仿真结果可以看到,采用所提控制策略后,系统可以根据PLL输出角频率偏差自适应调节阻尼系数,减小不平衡暂态能量的积累。因此,系统正负序PLL输出角频率在故障期间能够快速恢复暂态稳定。所提控制策略有效提高了系统的暂态同步稳定性。由此可知,所提控制策略适用于不同电网不对称短路故障类型。
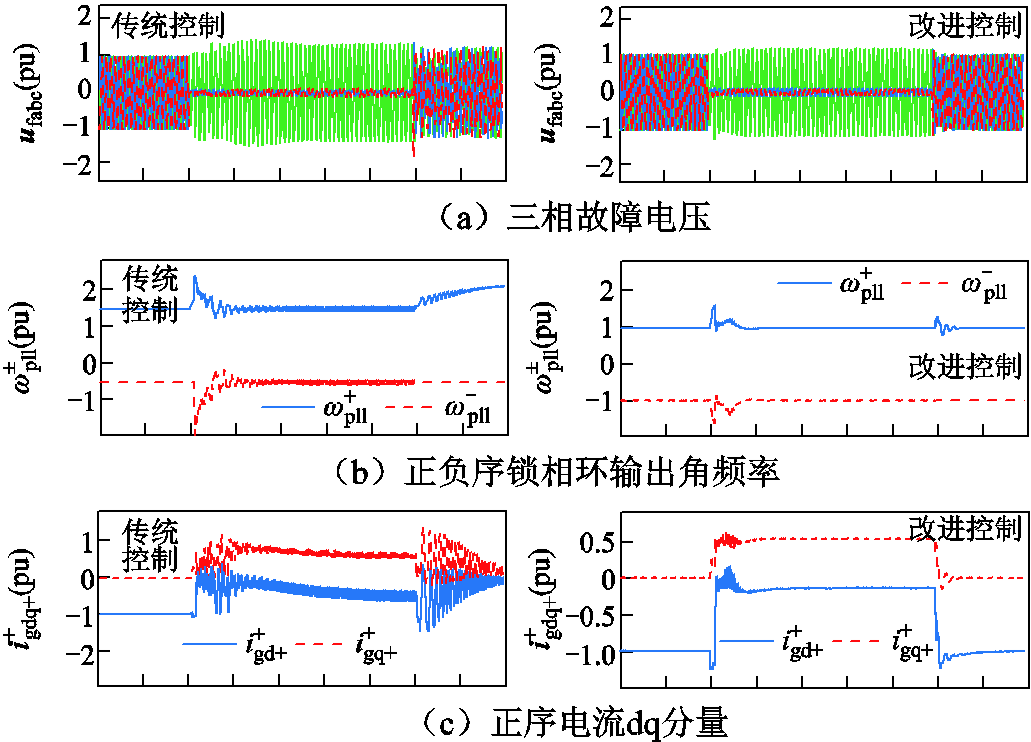
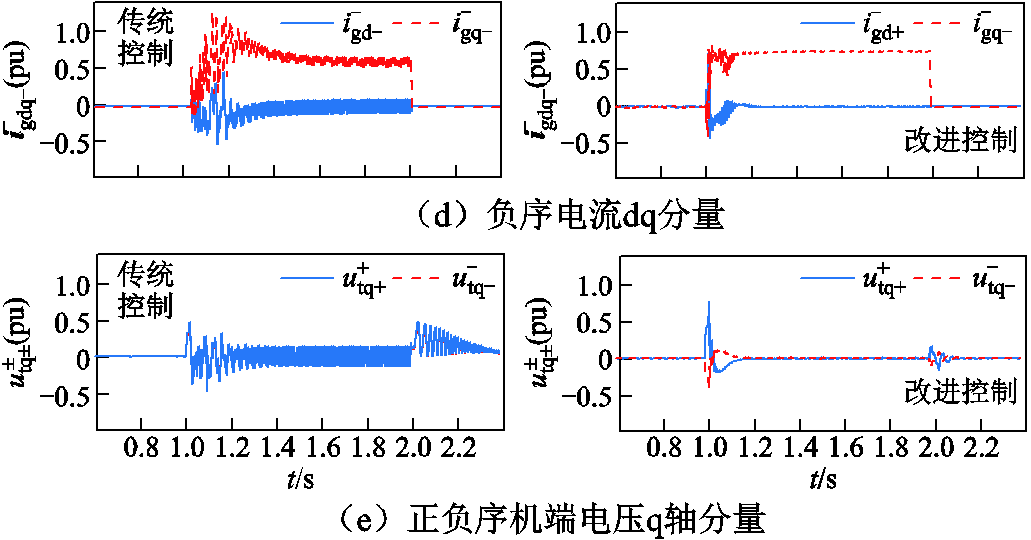
图14 并网VSC在两相接地故障下的仿真结果
Fig. 14 Simulation results of grid-connected VSC under two-phase ground fault
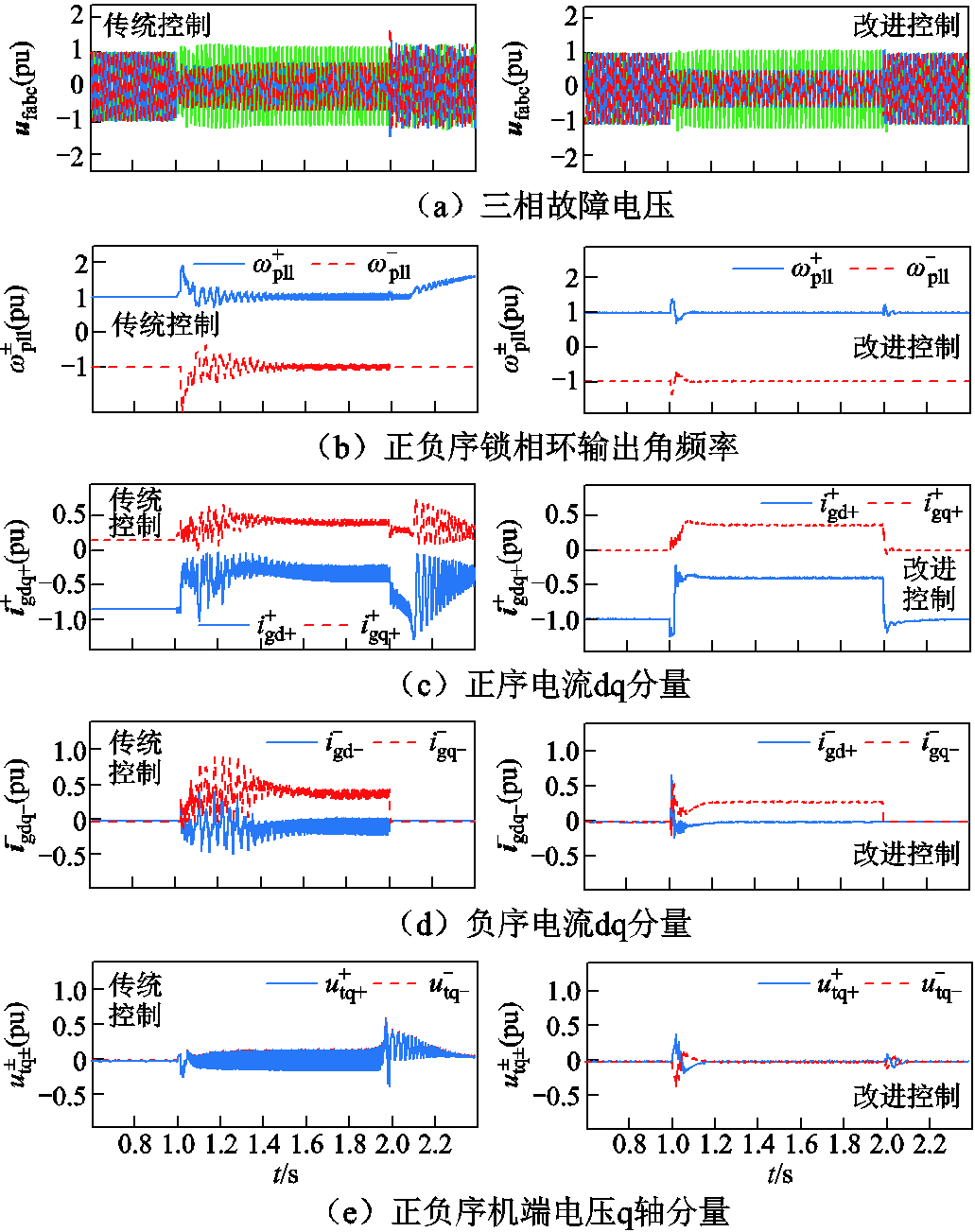
图15 并网VSC在相间短路故障下的仿真结果
Fig.15 Simulation results of grid-connected VSC under two-phase short-circuit fault
为了进一步验证本节理论分析的正确性以及所提正负序PLL改进控制策略的有效性,搭建了如图16所示的并网VSC实验平台,对可再生能源并网变流器在电网不对称短路故障期间的暂态失稳机理以及改进控制策略进行实验验证。实验系统的详细参数见表6。
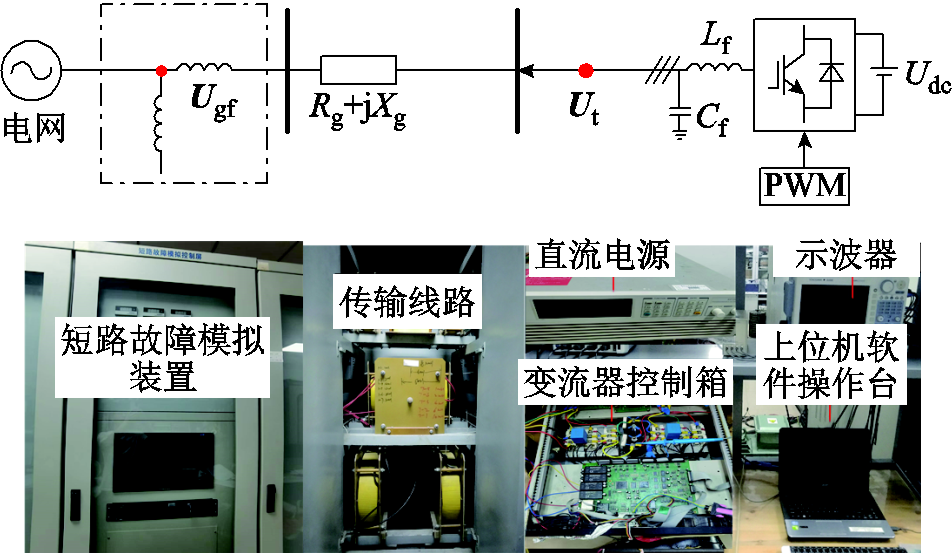
图16 实验系统结构
Fig.16 The structure of experimental platform
表6 并网VSC实验参数
Tab.6 Experimental parameters of the grid-connection VSC
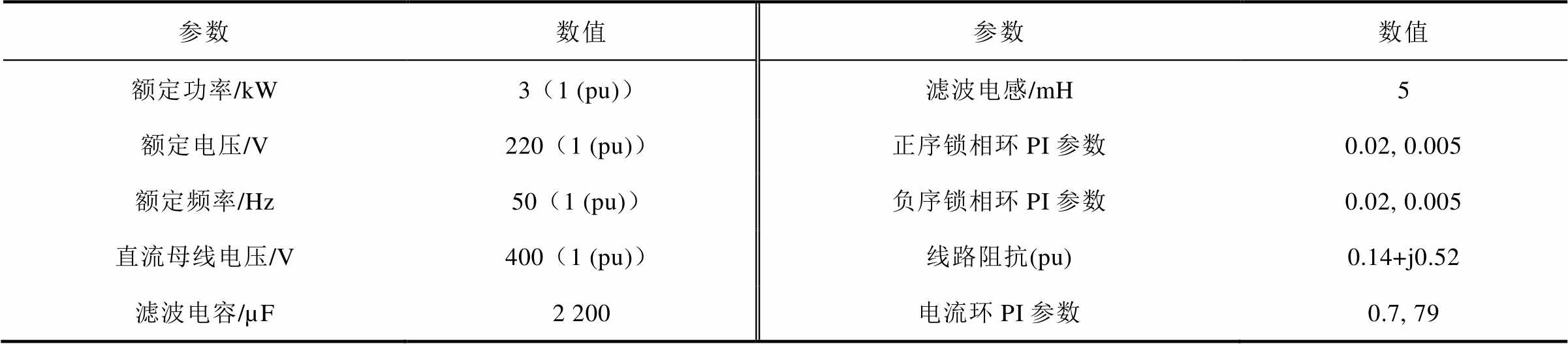
参数数值参数数值 额定功率/kW 3(1 (pu))滤波电感/mH5 额定电压/V220(1 (pu))正序锁相环PI参数0.02, 0.005 额定频率/Hz 50(1 (pu))负序锁相环PI参数0.02, 0.005 直流母线电压/V400(1 (pu))线路阻抗(pu)0.14+j0.52 滤波电容/µF2 200 电流环PI参数0.7, 79
图17给出了相间短路故障下并网VSC采用传统控制策略时的实验结果。从图17可以看到,系统采用传统控制策略时负序PLL出现了降频失步现象。与此同时,在序间控制耦合作用下,正序PLL输出角频率也发生了暂态同步失稳。图18给出了并网VSC在采用正负序PLL改进控制策略时的实验结果。从图18可以看到,系统正负序PLL均没有发生暂态同步失稳现象。由此可知,本节所提控制策略可以有效提高并网VSC在电网不对称短路故障下的暂态同步稳定性,实验结果验证了所提控制的有效性。
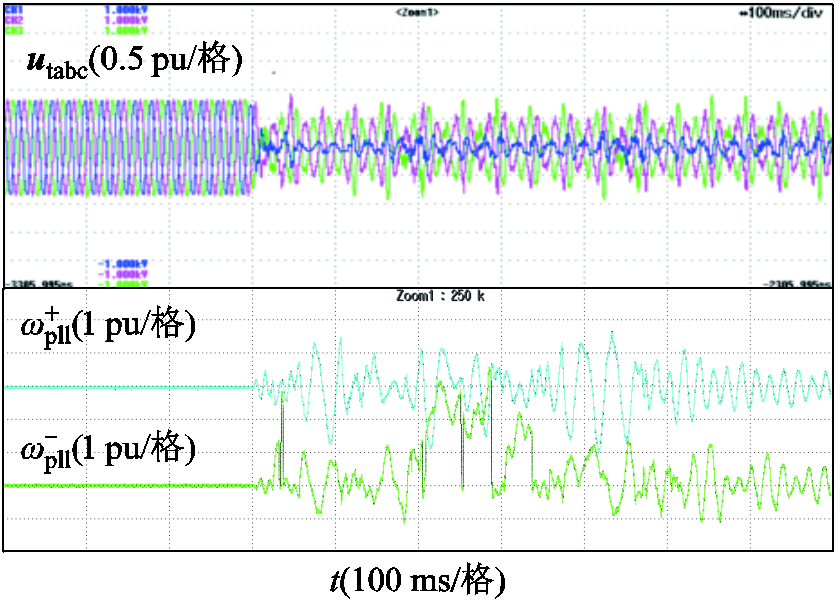
图17 相间短路故障下并网VSC采用传统控制策略时的实验结果
Fig.17 Experimental results of grid-connected VSC with traditional control strategy under phase-to-phase fault
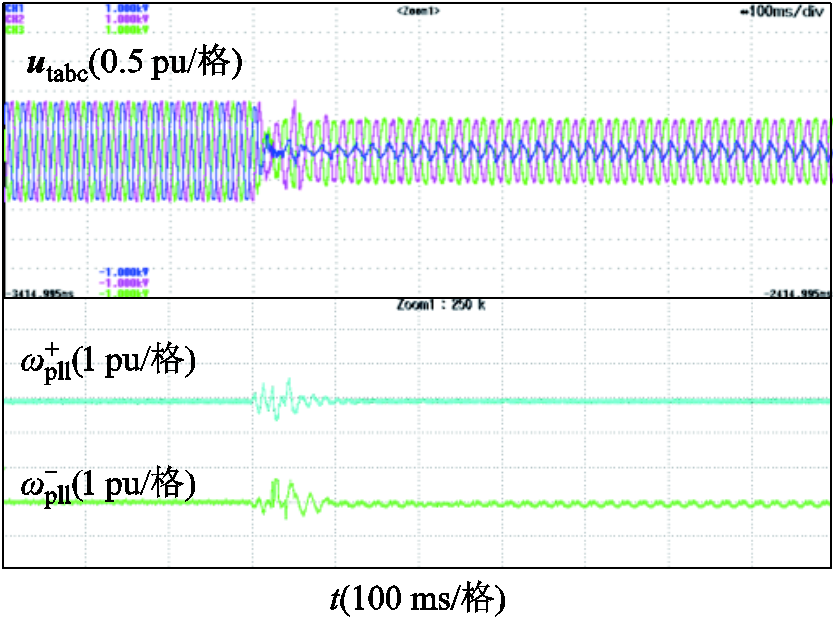
图18 相间短路故障下并网VSC采用PLL改进控制策略下的实验结果
Fig.18 Experimental results of grid-connected VSC with PLL improved control strategy under phase-to-phase fault
本文研究可再生能源并网变流器在电网不对称故障期间的暂态同步稳定性,揭示了系统正负序PLL的控制耦合特性,分析了不同因素对系统暂态稳定性的影响规律,提出了不对称故障下可再生能源并网变流器的暂态同步稳定增强控制策略。主要结论如下:
1)正负序机端电压q轴分量中电势的不平衡是导致可再生能源并网变流器在电网不对称故障期间发生暂态同步失稳的关键,并且由于电网不对称短路故障期间系统正负序阻抗网络相互连接,使得正负序PLL之间存在控制耦合关系。因此,机端电压q轴分量中任意序分量存在不平衡电势,都将导致可再生能源并网变流器在电网不对称故障期间发生暂态同步失稳。
2)基于等面积法构建了可再生能源并网变流器在电网不对称短路故障下的暂态同步稳定失稳判据,该判据可实现对系统暂态同步稳定性的量化评估。基于所提判据分析了单相接地故障条件下临界故障切除时间、正序无功电流指令、正序PLL比例积分系数等因素对系统的暂态同步稳定性的影响规律。分析结果表明:较长的故障检测延时以及不恰当的LVRT指令可能会导致正负序PLL因加减速能量不匹配而发生暂态同步失稳。此外,增大正序PLL的比例系数以及减小正序PLL积分系数可以有效增强系统的暂态稳定性。
3)提出了可再生能源并网变流器在电网不对称短路故障下的暂态稳定控制策略,该策略可以根据故障期间正负序PLL输出角频率偏差,自适应地调节正负序PLL的比例和积分系数,从而增大系统在电网不对称故障期间的阻尼系数,进而增加系统阻尼消耗的能量,减小不平衡能量的积累,削弱正负序PLL之间的暂态交互行为的影响,从而提高系统的暂态同步稳定性。
附 录
K1、K2、Z1、Z2、Z3、Z4的详细表达式为
 (A1)
(A1)
 (A2)
(A2)
 (A3)
(A3)
 (A4)
(A4)
 (A5)
(A5)
 (A6)
(A6)
参考文献
[1] 黄萌, 舒思睿, 李锡林, 等. 面向同步稳定性的电力电子并网变流器分析与控制研究综述[J]. 电工技术学报, 2024, 39(19): 5978-5994. Huang Meng, Shu Sirui, Li Xilin, et al. A review of synchronization-stability-oriented analysis and control of power electronic grid-connected converters[J]. Transactions of China Electrotechnical Society, 2024, 39(19): 5978-5994.
[2] 张亚耀, 占萌. 锁相环型变换器并网系统暂态主导失稳特征分析[J]. 中国电机工程学报, 2023, 43(23): 9285-9297. Zhang Yayao, Zhan Meng. Dominant transient unstable characteristics of PLL-based grid-connected converters[J]. Proceedings of the CSEE, 2023, 43(23): 9285-9297.
[3] 袁小明, 周蓉. 电力电子化并网设备激励下网络不对称故障分析的时变幅频对称分量法[J]. 中国电机工程学报, 2022, 42(16): 5811-5822, 6158. Yuan Xiaoming, Zhou Rong. Method of time-varying amplitude/frequency symmetrical components for network asymmetrical fault analysis excited by power electronic devices[J]. Proceedings of the CSEE, 2022, 42(16): 5811-5822, 6158.
[4] 刘铖, 李守超, 张宇驰, 等. 基于I-ω响应关联特征的新能源电力系统暂态功角稳定判别方法[J]. 电工技术学报, 2024, 39(24): 7902-7916. Liu Cheng, Li Shouchao, Zhang Yuchi, et al. Transient angle stability discrimination method of new energy power system based on I-ω response correlation characteristics[J]. Transactions of China Electrotechnical Society, 2024, 39(24): 7902-7916.
[5] 余墨多, 黄文焘, 邰能灵, 等. 逆变型分布式电源并网运行暂态稳定机理与评估方法[J]. 电工技术学报, 2022, 37(10): 2596-2610. Yu Moduo, Huang Wentao, Tai Nengling, et al. Transient stability mechanism and judgment for inverter interfaced distributed generators connected with public grids[J]. Transactions of China Electro-technical Society, 2022, 37(10): 2596-2610.
[6] 裴金鑫, 姚骏, 黄森, 等. 电网短路故障下新能源并网变换器的暂态同步机制及其自适应稳定控制策略[J]. 中国电机工程学报, 2022, 42(16): 5922-5934, 6167. Pei Jinxin, Yao Jun, Huang Sen, et al. Transient synchronization mechanism and adaptive stability control strategy for renewable energy grid-connected converter under grid faults[J]. Proceedings of the CSEE, 2022, 42(16): 5922-5934, 6167.
[7] Ma Shaokang, Geng Hua, Liu Lu, et al. Grid-synchronization stability improvement of large scale wind farm during severe grid fault[J]. IEEE Transactions on Power Systems, 2018, 33(1): 216-226.
[8] Zhang Meiqing, Sun Li. PLL and additional frequency control constituting an adaptive synchronization mechanism for VSCs[J]. IEEE Transactions on Power Systems, 2020, 35(6): 4920-4923.
[9] Göksu Ö, Teodorescu R, Bak C L, et al. Instability of wind turbine converters during current injection to low voltage grid faults and PLL frequency based stability solution[J]. IEEE Transactions on Power Systems, 2014, 29(4): 1683-1691.
[10] 王诗雯, 刘飞, 刘沁怡, 等. 不对称故障下两级式光伏并网系统低电压穿越控制[J]. 电网技术, 2023, 47(1): 91-102. Wang Shiwen, Liu Fei, Liu Qinyi, et al. Low-voltage riding-through control strategy for two-staged grid-connected photovoltaic system under asymmetrical faults[J]. Power System Technology, 2023, 47(1): 91-102.
[11] Liu Ruikuo, Yao Jun, Sun Peng, et al. Complex impedance-based frequency coupling characteristics analysis of DFIG-based WT during asymmetric grid faults[J]. IEEE Transactions on Industrial Electronics, 2021, 68(9): 8274-8288.
[12] 彭星, 姜飞, 涂春鸣, 等. 不对称故障下光伏逆变器的最优电压支撑策略[J]. 电网技术, 2021, 45(11): 4259-4268. Peng Xing, Jiang Fei, Tu Chunming, et al. Optimal voltage support strategy for photovoltaic inverters under asymmetric faults[J]. Power System Technology, 2021, 45(11): 4259-4268.
[13] 解宝, 李萍宇, 苏建徽, 等. 不平衡电网下并网逆变器阻抗建模及稳定性分析[J]. 高电压技术, 2023, 49(12): 5196-5206. Xie Bao, Li Pingyu, Su Jianhui, et al. Impedance modeling and stability analysis of grid-connected inverter under unbalanced grid[J]. High Voltage Engineering, 2023, 49(12): 5196-5206.
[14] He Xiuqiang, He Changjun, Pan Sisi, et al. Synchronization instability of inverter-based generation during asymmetrical grid faults[J]. IEEE Transactions on Power Systems, 2022, 37(2): 1018-1031.
[15] Wang Zhi, Guo Li, Li Xialin, et al. PLL synchronization transient stability analysis of a weak-grid connected VSC during asymmetric faults[J]. IEEE Transactions on Power Electronics, 2024, 39(2): 2140-2154.
[16] 李红, 粟时平, 唐铭泽, 等. 不对称故障下考虑电压跌落程度的新能源逆变器控制策略[J]. 电力系统保护与控制, 2023, 51(1): 21-32. Li Hong, Su Shiping, Tang Mingze, et al. Control strategy of renewable energy inverter considering voltage sag degree under asymmetric faults[J]. Power System Protection and Control, 2023, 51(1): 21-32.
[17] Guo Xiaoqiang, Zhang Xue, Wang Baocheng, et al. Asymmetrical grid fault ride-through strategy of three-phase grid-connected inverter considering network impedance impact in low-voltage grid[J]. IEEE Transactions on Power Electronics, 2014, 29(3): 1064-1068.
[18] Chang Yuanzhu, Hu Jiabing, Tang W, et al. Fault current analysis of type-3 WTs considering sequential switching of internal control and protection circuits in multi time scales during LVRT[J]. IEEE Transactions on Power Systems, 2018, 33(6): 6894-6903.
[19] 姚骏, 孙鹏, 刘瑞阔, 等. 弱电网不对称故障期间双馈风电系统动态稳定性分析[J]. 中国电机工程学报, 2021, 41(21): 7225-7237. Yao Jun, Sun Peng, Liu Ruikuo, et al. Dynamic stability analysis of DFIG-based wind power system during asymmetric faults of weak grid[J]. Proceedings of the CSEE, 2021, 41(21): 7225-7237.
[20] Chang Yuanzhu, Kocar I, Hu Jiabing, et al. Coordinated control of DFIG converters to comply with reactive current requirements in emerging grid codes[J]. Journal of Modern Power Systems and Clean Energy, 2022, 10(2): 502-514.
[21] 王书征, 李先允, 许峰. 不对称电网故障下级联型光伏并网逆变器的低电压穿越控制[J]. 电力系统保护与控制, 2019, 47(13): 84-91. Wang Shuzheng, Li Xianyun, Xu Feng. Low voltage ride-through controlling of cascaded inverter for grid-connected photovoltaic systems under asymmetric grid fault[J]. Power System Protection and Control, 2019, 47(13): 84-91.
[22] Gu Jiateng, Zhao Rende, He Jinkui, et al. Enhanced excitation converter with parallel/series DC-link based on TAB for DFIG to improve the LVRT capability under severe grid faults[J]. IEEE Transactions on Power Electronics, 2023, 38(10): 12304-12308.
[23] 万子镜, 田震, 王伟, 等. 基于平滑切换的不平衡工况下直驱风机故障穿越控制策略[J]. 电力系统自动化, 2023, 47(19): 138-146. Wan Zijing, Tian Zhen, Wang Wei, et al. Smooth switching based fault ride-through control strategy for direct-driven wind turbine under unbalance condition[J]. Automation of Electric Power Systems, 2023, 47(19): 138-146.
[24] Mortazavian S, Mohamed Y A I. Analysis and augmented model-based control design of distributed generation converters with a flexible grid-support controller[J]. IEEE Transactions on Power Electronics, 2019, 34(7): 6369-6387.
[25] 熊连松, 修连成, 康志亮, 等. 不平衡工况下电网电压序分量快速提取方法[J]. 电力系统自动化, 2019, 43(11): 144-151. Xiong Liansong, Xiu Liancheng, Kang Zhiliang, et al. Fast extraction method of grid voltage sequence components in unbalanced conditions[J]. Automation of Electric Power Systems, 2019, 43(11): 144-151.
[26] 风电场接入电力系统技术规定第1部分:陆上风电: GB/T 19963.1—2021[S]. 2021.
[27] 郝艺, 周瑀涵, 刘晨曦, 等. 含跟网型储能的新能源多馈入系统小扰动电压支撑强度分析[J]. 电工技术学报, 2024, 39(11): 3569-3580. Hao Yi, Zhou Yuhan, Liu Chenxi, et al. Small-disturbance voltage support strength analysis for renewable multi-infeed system with grid-following energy storage[J]. Transactions of China Electro-technical Society, 2024, 39(11): 3569-3580.
[28] 李锐博, 颜湘武, 蔡光, 等. 离散域下基于轮换计算的跟/构网逆变器混联系统暂态稳定性求解算法[J]. 电工技术学报, 2025, 40(9): 2780-2794. Li Ruibo, Yan Xiangwu, Cai Guang, et al. Transient stability solver for grid-following/forming-converter hybrid system based on alternating calculation in discrete domain[J]. Transactions of China Electro-technical Society, 2025, 40(9): 2780-2794.
Abstract Under asymmetrical grid faults, there are not only violent dynamic interactions between the generation equipment and the power grid, but also between the positive sequence components and negative sequence components, which makes the transient synchronous instability of the renewable energy power generation (REPG) system very prominent. To solve this issue, with the dual-sequence phase-locked loop (PLL) control model, the coupling control characteristics between the positive and negative sequence components is revealed in this paper. Then, the influence of PLL control parameters, as well as the low voltage ride through (LVRT) reference on the transient behavior positive and negative sequence equivalent power angles is analyzed. In addition, to improve the transient synchronous stability of the REPG system under asymmetrical grid faults, a transient synchronous stability enhancement control strategy is proposed. Finally, the simulation and experimental verification are carried out.
Firstly, considering the nonlinear control characteristics of PLL, a nonlinear transient model of PLL based on the separation of positive and negative sequence is established. Based on energy function, the transient synchronous stability instability criterion of REPG system under asymmetric faults is constructed, which can realize the quantitative evaluation of transient synchronous stability of the system. The influence of critical fault removal time, LVRT current references and proportional integral coefficient of PLL on the transient synchronous stability of the system is analyzed. Finally, a transient stability control strategy of REPG system under asymmetric faults is proposed.
Simulation and experimental results show that, when the system adopts the traditional PLL control strategy in Ref.[6], the acceleration and deceleration energies of the system at stage 1 are  [0.564, 0.518, 0.123, 0.421]T. In this case,
[0.564, 0.518, 0.123, 0.421]T. In this case,  is greater than max (
is greater than max ( ). Consequently, the transient synchronous instability occurs in the positive and negative sequence PLL. When the system adopts the proposed control strategy, the acceleration and deceleration energies of the system at stage 1 are
). Consequently, the transient synchronous instability occurs in the positive and negative sequence PLL. When the system adopts the proposed control strategy, the acceleration and deceleration energies of the system at stage 1 are
 [0.564 0.602 0.123 0.483]T. It can be seen from the calculation results that is smaller than max() with the proposed control strategy is adopted. Therefore, there is no transient synchronous instability in the system. Consequently, the proposed control strategy can effectively improve the transient synchronization stability of REPG system under asymmetric faults.
[0.564 0.602 0.123 0.483]T. It can be seen from the calculation results that is smaller than max() with the proposed control strategy is adopted. Therefore, there is no transient synchronous instability in the system. Consequently, the proposed control strategy can effectively improve the transient synchronization stability of REPG system under asymmetric faults.
The following conclusions can be drawn from the simulation analysis: (1) The unbalance of q-axis potential in the positive and negative sequence terminal voltage is the key factor that causes the transient synchronous instability of the REPG system during the asymmetric faults. Moreover, there is the control coupling relationship between the positive and negative sequence PLL due to the interconnection of the positive and negative sequence impedance networks during the asymmetric faults. (2) The improper fault detection delay and LVRT current references may lead to transient synchronous instability due to the mismatch of acceleration and deceleration energies. (3) A transient stability control strategy of REPG system under asymmetric faults is proposed, which can improve the damping coefficient of the system during asymmetrical faults, as well as the transient synchronous stability of the system.
keywords:Asymmetrical grid faults, phase-locked loop-based grid-connected, transient synchronous stability, coupling control characteristics, stability control strategy
DOI: 10.19595/j.cnki.1000-6753.tces.250572
中图分类号:TM712
智能电网国家科技重大专项项目(2024ZD0801400)和国家电网公司科技项目(52272224000V)资助。
收稿日期 2025-04-08
改稿日期 2025-05-09
罗 艺 男,1997年生,博士研究生,研究方向为新能源发电并网控制技术等。E-mail:20211101021@cqu.edu.cn
姚 骏 男,1979年生,博士,教授,博士生导师,研究方向为电力电子与电力传动、风电技术及新能源电能变换技术。E-mail:topyj@163.com(通信作者)
(编辑 郭丽军)