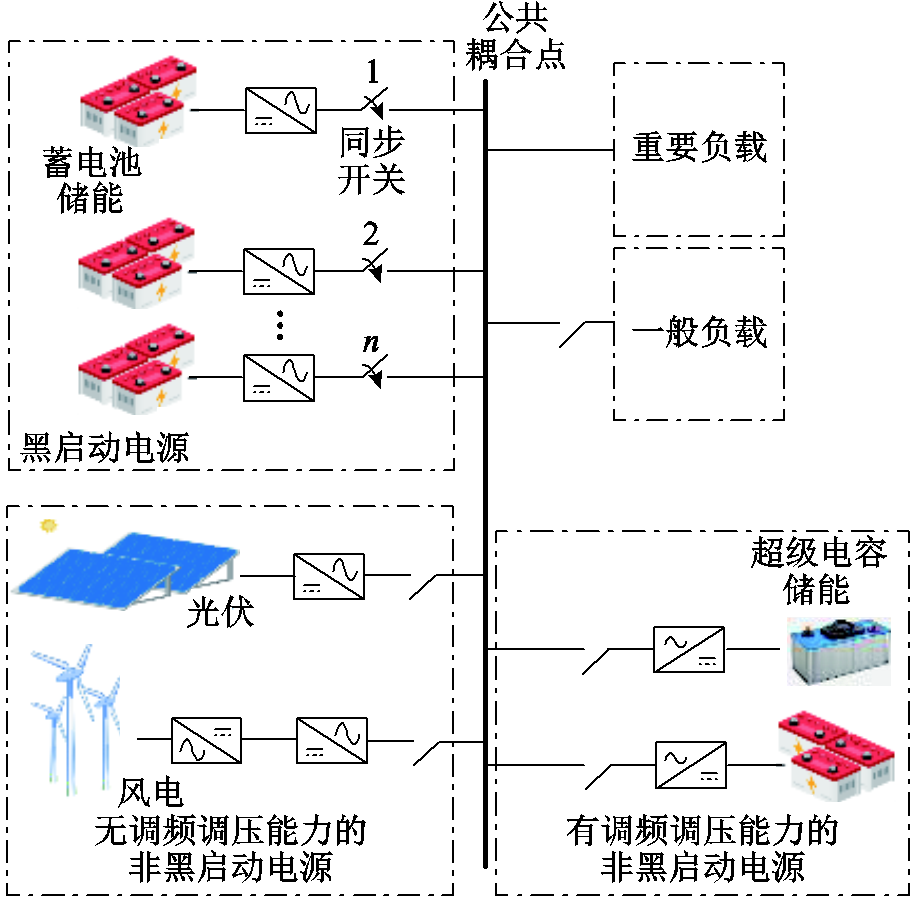
图1 典型孤岛交流微电网及其黑启动示意图
Fig.1 Diagram of typical islanded AC microgrid and its black-start operation
摘要 当大电网发生故障时,需要在负载信息未知、各分布式电源无法实现信息交互的情况下,紧急启动孤岛交流微电网以快速恢复负载供电。这就要求微电网具备在“全黑”状态下启动的能力,而实现黑启动的关键在于抑制分布式电源接口逆变器的过电流。为了提高逆变器的过电流抑制能力,该文提出了一种基于自适应虚拟阻抗与缓启升压协同的交流微电网黑启动控制方法。首先,在现有缓启升压控制中引入自适应虚拟阻抗,以抑制逆变器并入公共耦合点瞬间产生的冲击电流;其次,通过对虚拟阻抗进行缓切,消除了过电流抑制过程中的虚拟阻抗振荡;然后,通过建立虚拟阻抗环小信号模型以及分析过电流抑制过程,提供了所提方法的参数设计流程;最后,仿真和实验结果表明,当存在电压幅值偏差或电压相位不同步时,所提方法均可实现过电流的抑制以及虚拟阻抗的单调缓切。
关键词:孤岛微电网 黑启动 过电流抑制 缓启升压 自适应虚拟阻抗 虚拟阻抗缓切
当极端天气或自然灾害等因素导致大电网停电时,微电网作为由分布式电源和负载构成的独立电能系统,需在孤岛模式下启动运行,以快速恢复负载供电[1-4]。典型孤岛交流微电网及其黑启动示意图如图1所示,各分布式电源通过逆变器并联接入公共耦合点(Point of Common Coupling, PCC)。由于在紧急情况下往往难以建立有效通信连接,逆变器之间无法实现信息交互,同时也无法获取负载信息[5],即微电网处于“全黑”状态。为应对这一特殊工况,微电网应具备黑启动能力[6-10]。
传统的黑启动流程[11-13]为:①切除系统所有负载。②启动黑启动电源,并将PCC电压幅值抬升到额定值。黑启动电源有两个要求:采用构网型控制方式以维持稳定的PCC电压和频率;能够提供稳定的功率输出。本文采用蓄电池储能系统作为黑启动电源。③投入重要负载。④启动其他具有调压调频能力的非黑启动电源,如超级电容等[13]。⑤启动无调压调频能力的非黑启动电源,如光伏、风机等。⑥投入一般负载。本文重点关注步骤①~步骤③,即要求在微电网“全黑”状态下,将PCC电压幅值抬升至额定值[14-16];同时,为快速恢复重要负载供电,本文在步骤①中仅切除一般负载,黑启动电源需带重要负载进行黑启动。
图1 典型孤岛交流微电网及其黑启动示意图
Fig.1 Diagram of typical islanded AC microgrid and its black-start operation
另外,在图1中,为了降低控制算法的复杂度,一般采用串行黑启动方式建立PCC电压,即每台黑启动电源按顺序依次并入PCC端[15-16]。黑启动电源的数量取决于两个因素:PCC端重要负载的额定功率和黑启动电源的额定功率。随着并入PCC端黑启动电源数量的增加,电源输出功率逐渐提升,PCC电压幅值也随之抬升。当第n台黑启动电源并入PCC端后,若PCC电压幅值达到额定值,则在本文中表示黑启动已经完成,此时黑启动电源的数量即为n。
由于黑启动电源需要带重要负载进行黑启动,且逆变器的过电流能力仅为1.1(pu)~1.5(pu),因此需在黑启动过程中避免逆变器过电流[17-18]。逆变器过电流主要源于以下三个方面[5, 19-21]。①浪涌电流:当PCC端存在感应电机等特殊类型负载时,若逆变器的输出电压发生突变,该类负载的磁心磁通量会迅速增加,从而产生较大幅值的电流;②较大的负载电流:由于黑启动过程中负载大小未知,较高的PCC电压可能会导致较大的负载电流;③并联冲击电流:当同步开关闭合,逆变器并入PCC端时,由于并联在PCC端的各逆变器输出电压之间存在幅值偏差或相位不同步,从而引发的过电流。根据抑制过电流方式的不同,黑启动方法可进一步分为电流源型-电压源型切换方法和电压源型方法。
在电流源型-电压源型切换方法[5]中,由于启动初期并联在PCC端的黑启动电源数量较少,电源输出功率无法满足负载需求,此时各逆变器工作在电流源模式。随着越来越多的黑启动电源并入PCC端,电源输出功率逐渐提升,若电源输出功率满足负载需求,各逆变器则切换到电压源模式。然而,由于PCC端缺乏电网支撑,启动初期的电流源并联模式稳定性较差。
为了提高孤岛微电网运行的稳定性,以缓启升压为代表的电压源型黑启动方法[22-26]被提出。在该方法中,逆变器的输出电压幅值以设定步长缓慢抬升,从而有效地减轻了由特殊类型负载引起的浪涌电流;此外,输出电压幅值抬升的增量取决于设定的输出电流限制值,因此也避免了较大的负载电流。随着越来越多的黑启动电源并入PCC端,当电源输出功率满足负载需求时,各逆变器的输出电压便上升到额定值,黑启动完成。然而,由于并联逆变器之间无法交互电压信息,因此难以有效地抑制并联冲击电流。为了避免并联冲击电流导致的逆变器过电流,可通过减小输出电流限制值以获得更大的电流安全裕度,但这会浪费黑启动电源的输出功率,并需投入更多的黑启动电源来完成黑启动。
为了有效且经济地抑制并联冲击电流,虚拟阻抗被广泛应用。相比于实际阻抗,虚拟阻抗避免了功率损耗,但若加入一固定值的虚拟阻抗,可能无法兼顾对不同过电流值的抑制效果。因此,为实现对不同过电流值的有效抑制,通常依据输出电流幅值来自适应地调节虚拟阻抗[27-30]。具体地,当输出电流幅值超过限流阈值时,逆变器运行在过电流抑制模态,即根据输出电流幅值成比例地加大虚拟阻抗以抑制并联冲击电流;反之,虚拟阻抗置零,返回初始模态。然而,此方法将导致系统在初始模态和过电流抑制模态之间频繁切换,从而引发虚拟阻抗振荡,甚至危及系统稳定运行。
为了提高孤岛微电网黑启动过程中的逆变器过电流抑制能力,本文提出了一种基于自适应虚拟阻抗与缓启升压协同的黑启动控制方法。该方法在采用缓启升压控制抑制浪涌电流和较大负载电流的基础上,通过引入自适应虚拟阻抗控制实现了对并联冲击电流的抑制,主要工作如下:
(1)根据逆变器输出电流幅值的大小,虚拟阻抗分别由4个模态进行调节。除初始模态外,过电流抑制模态用于抑制缓启升压过程中的并联冲击电流;此外,本文还通过额外引入缓冲模态和虚拟阻抗缓切模态,消除了过电流抑制过程中的虚拟阻抗振荡。
(2)通过分析过电流抑制过程,对虚拟阻抗缓切模态中的关键参数进行了设计;同时通过建立包含电压内环的完整虚拟阻抗环小信号模型,对过电流抑制模态的稳定性进行了分析并指导其参数设计。
本文中,各逆变器采用下垂控制进行同步。为确保下垂控制的稳定性,虚拟阻抗的类型由线路阻抗特性决定:在阻性线路下,虚拟阻抗表现为虚拟电阻;而在感性线路下,虚拟阻抗则表现为虚拟电感。本文以阻性线路为例进行分析;对于感性线路,只需将虚拟电阻替换为虚拟电感即可。
孤岛交流微电网中逆变器并联系统结构示意图如图2所示,每个逆变器包括直流输入母线(Udc)、三相开关网络、电感(Lf)-电容(Cf)滤波器、输出端同步开关S以及本地控制器。图2中,iLabc为三相电感电流,ioabc为三相输出电流,uCabc为三相输出电压, 为同步开关的PCC侧电压,vsyn为同步开关S的控制信号。各逆变器通过线路阻抗Rline+Lline并联在PCC端,共同为负载Zload供电。
为同步开关的PCC侧电压,vsyn为同步开关S的控制信号。各逆变器通过线路阻抗Rline+Lline并联在PCC端,共同为负载Zload供电。
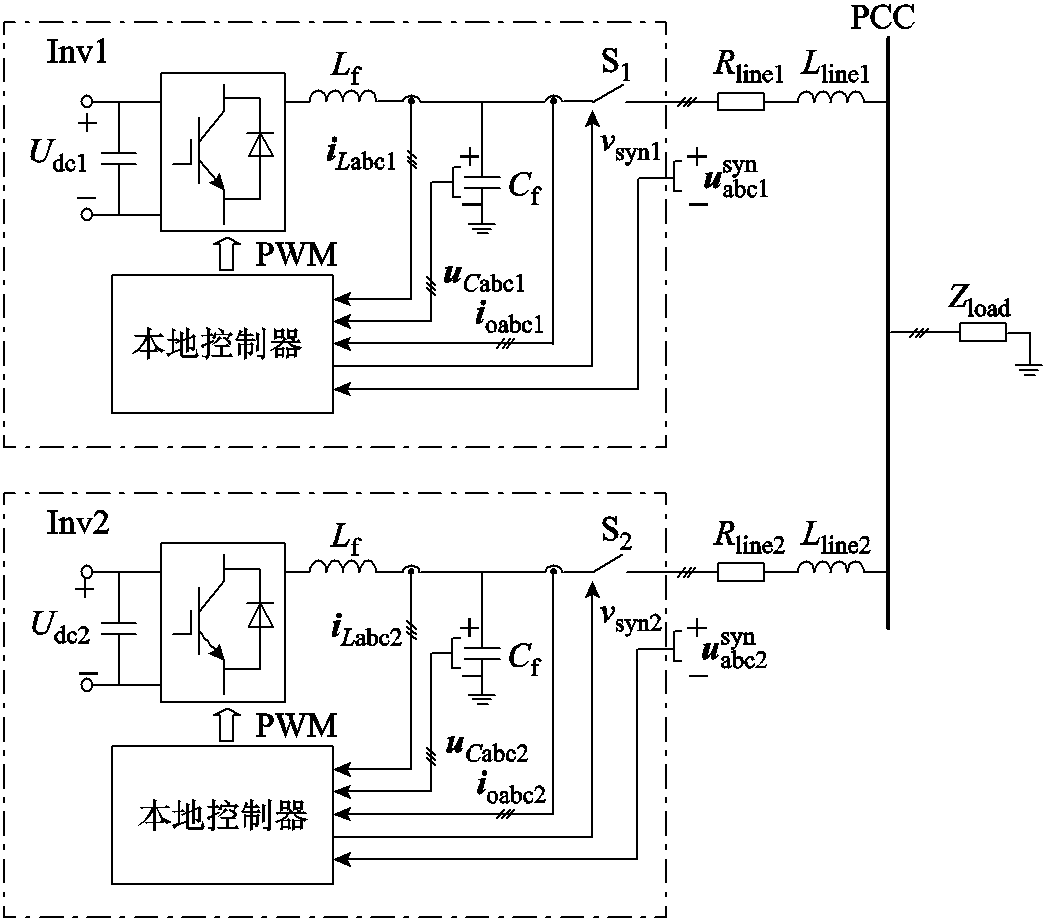
图2 孤岛交流微电网中逆变器并联系统结构示意图
Fig.2 Schematic of parallel inverters in islanded AC microgrids
逆变器本地控制器内部控制框图如图3所示,包括传统的下垂控制与预同步、电压控制等模块,以及所提黑启动方法中的缓启升压、自适应虚拟阻抗等模块。在下垂控制与预同步模块中,Q和P分别为逆变器输出的无功功率和有功功率;Q0和P0分别为额定无功功率和额定有功功率;kq和kp分别为无功下垂系数和有功下垂系数;wsyn为预同步输出的频率;w0为逆变器的额定频率;Ebs为黑启动电压幅值;w和E分别为逆变器输出的频率和电压幅值。基波参考电压生成模块生成的电压记作ebsαβ。ebsαβ的幅值E由黑启动电压幅值Ebs和下垂控制共同决定。但是由于下垂系数kp较小,下垂控制造成的电压幅值偏差可忽略,即E≈Ebs。因此本文为了论述方便,将ebsαβ定义为黑启动电压。在电压控制模块中,eRvαβ为虚拟阻抗压降, 为逆变器给定输出电压。下文将重点介绍缓启升压和自适应虚拟阻抗控制的原理。
为逆变器给定输出电压。下文将重点介绍缓启升压和自适应虚拟阻抗控制的原理。
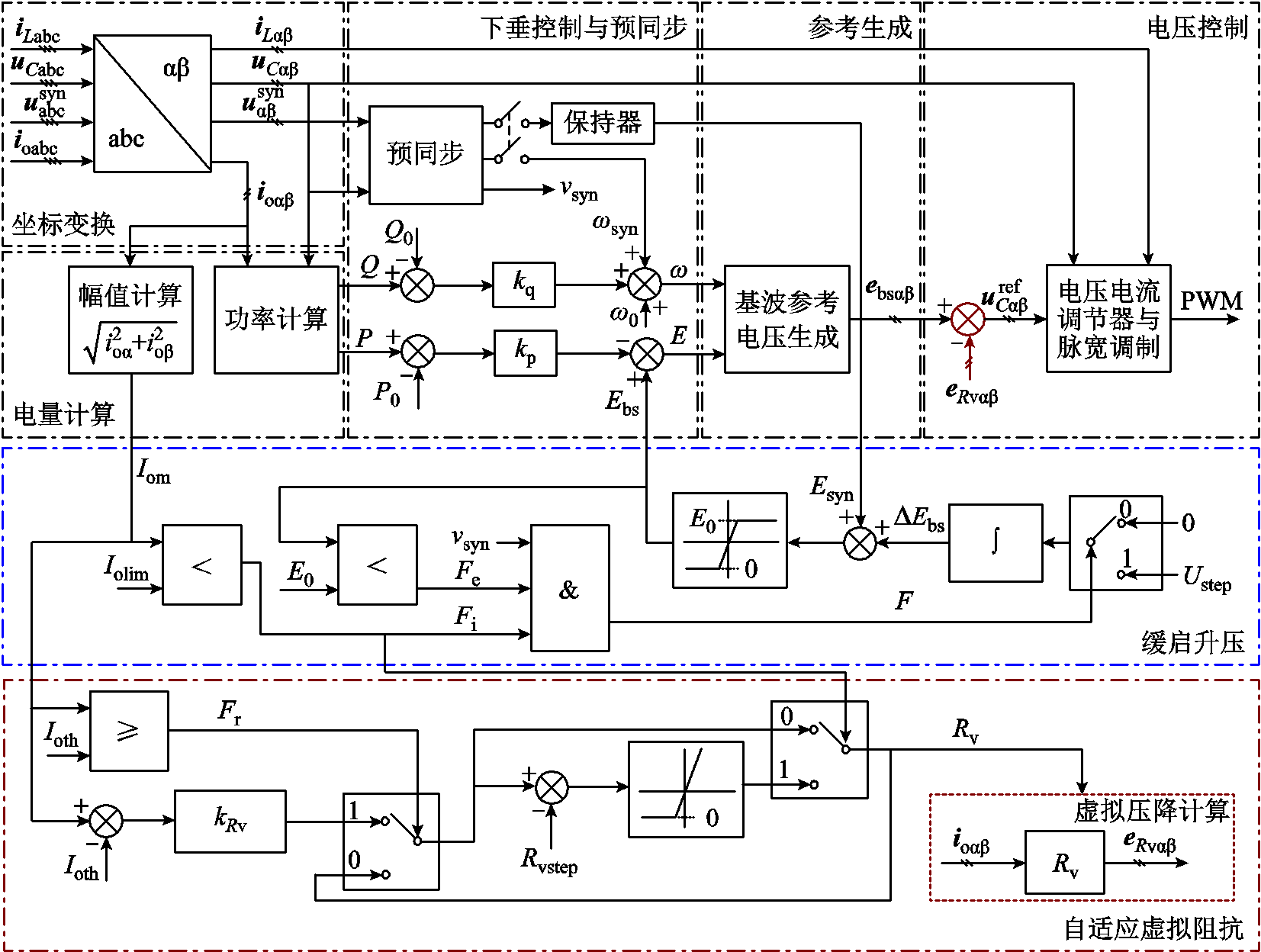
图3 包含所提黑启动方法的逆变器本地控制器控制框图
Fig.3 Control block diagram of the inverter local controller with the proposed black-start method
1.2.1 缓启升压
在图3所示的缓启升压模块中,黑启动电压幅值Ebs由预同步产生的电压幅值Esyn和缓启升压产生的黑启动电压幅值增量ΔEbs加和而成。ΔEbs由缓启升压控制标志位F决定。而F则由电流判断标志位Fi、电压判断标志位Fe以及同步开关控制信号vsyn的逻辑“与”决定。当逆变器输出电流幅值Iom小于设定的缓启升压限流值Iolim时,Fi=1;反之,Fi=0。当Ebs小于逆变器额定电压幅值E0时,Fe=1;反之,Fe=0。当预同步完成时,vsyn=1;反之,vsyn=0。当F=1时,启动缓启升压,ΔEbs以缓启升压步长Ustep逐渐升高,Ebs随之抬升;当F=0时,停止缓启升压,ΔEbs停止升高,Ebs维持不变。
在虚拟阻抗控制不作用的情况下,缓启升压过程的理想波形如图4a所示,其中f为黑启动电压ebs的相位;Ebs为ebs的幅值。图4a中,在0<t≤t0阶段,逆变器Inv1进行缓启升压,Ebs1逐渐抬升,直到输出电流幅值Iom1达到限流值Iolim为止,此时Ebs1=EIolim,EIolim为Inv1达到限流值时的黑启动电压幅值;Inv2处于待机状态。在t0<t≤t1阶段,逆变器Inv1维持稳定运行;逆变器Inv2进行预同步,并在t1时刻预同步完成(即vsyn2=1),黑启动电压幅值Ebs1=Ebs2且其相位f1=f2,然后并入PCC端。在t1<t≤t3阶段,负载电流在逆变器Inv1和逆变器Inv2之间均分,两台逆变器均进行缓启升压,Ebs1和Ebs2同时抬升。在t3时刻之后,Ebs1和Ebs2均达到额定值E0,黑启动结束。
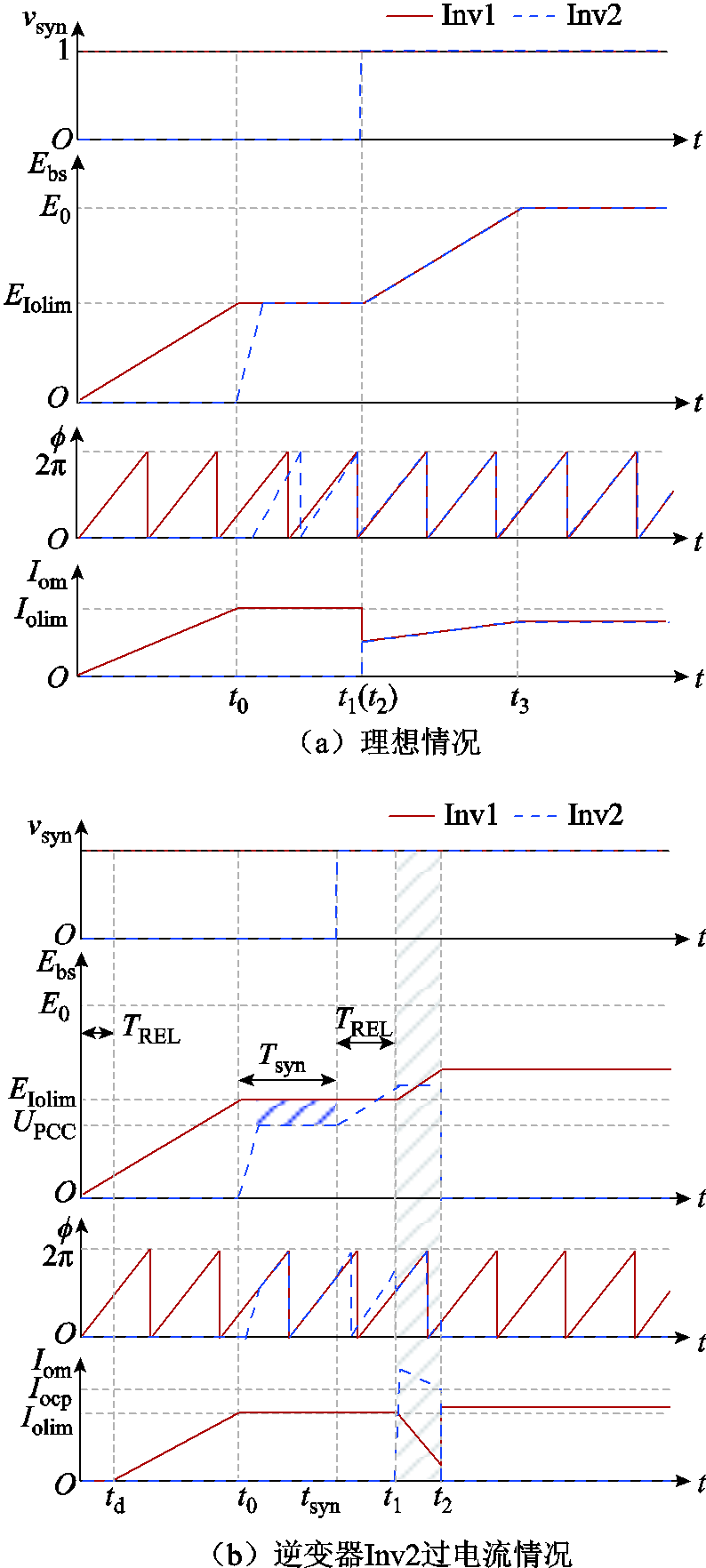
图4 逆变器并联系统缓启升压运行波形
Fig.4 Sketch waveforms of parallel inverters with slow-voltage-rising method
然而,在t1时刻,两台逆变器黑启动电压之间易出现幅值偏差(Ebs1≠Ebs2)和相位不同步(f1≠f2),如图4b所示,具体原因分析如下:
1)预同步。在预同步阶段Tsyn内,逆变器Inv2的黑启动电压幅值Ebs2将同步到PCC端电压幅值UPCC(即Ebs2=UPCC)。然而,由于逆变器Inv1是带载启动,其输出电流会在线路阻抗上产生压降,导致UPCC<Ebs1,进而有Ebs2<Ebs1。
2)同步开关S的机械延迟时间TREL。由于同步开关S通常选用继电器或接触器,其在接收到预同步完成信号(即vsyn=1)后,需要经过TREL后才能可靠闭合。故而在TREL内,预同步虽已完成,但同步开关S尚未闭合,此时逆变器未并入PCC端,但缓启升压控制已经启动。缓启升压的启动使得在TREL期间,Ebs2上会产生一额外增量TRELfsUstep(其中fs为逆变器的控制频率),进一步加剧了幅值偏差。此外,在TREL期间,Inv2预同步的输出频率wsyn2也已被切除,导致已同步的黑启动电压相位再次变得不同步,即f1≠f2。
逆变器黑启动电压间的幅值偏差或相位不同步极易导致逆变器在并入PCC端时刻(如图4b中的t1时刻)出现冲击电流。若冲击电流幅值高于逆变器的过电流保护值Iocp,逆变器将因过电流而停机。为了避免这一问题,可以在控制中对TREL进行补偿。但由于TREL受同步开关S的机械结构、电磁特性、驱动电流及寿命等因素的影响[31],难以精确测量,补偿效果有限。也可以通过减小Ustep来降低Ebs2的增量,然而这又会降低黑启动的速度。
1.2.2 自适应虚拟阻抗
本文采用图3所示的自适应虚拟阻抗模块来抑制缓启升压过程中的并联冲击电流。图3中,Ioth为虚拟阻抗限流阈值,且Iolim<Ioth<Iocp;Fr为过电流抑制判断标志位,当Iom≥Ioth时,Fr=1,反之,Fr=0;kRv为虚拟阻抗调节系数;Rvstep(>0)为设定的虚拟阻抗缓切步长。每个并联逆变器的kRv和Rvstep均相同。根据电流幅值Iom和虚拟阻抗Rv的不同,控制被划分为4个模态,各模态之间的转换关系如图5所示。
在不同模态下,自适应虚拟阻抗控制输出的虚拟阻抗和缓启升压控制输出的黑启动电压幅值见表1。
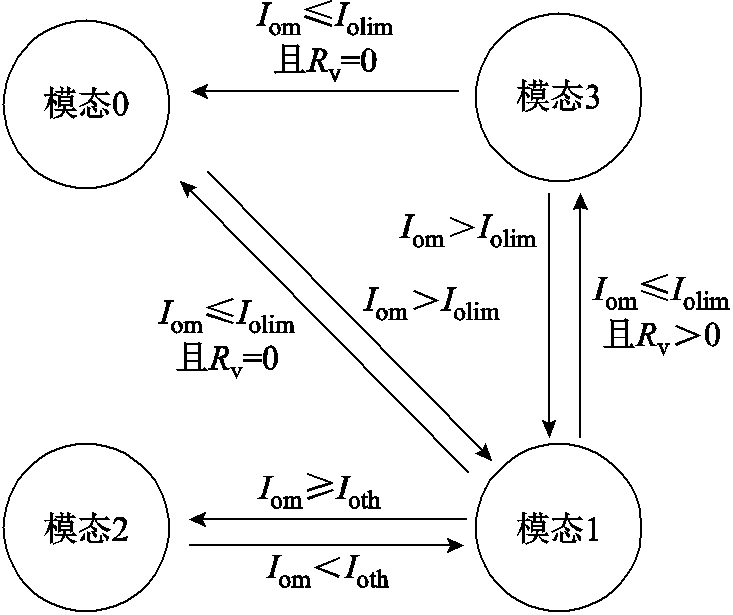
图5 各模态之间的转换关系
Fig.5 The switching condition among modes
表1 各模态下的虚拟阻抗和黑启动电压幅值
Tab.1 Virtual impedance and black-start voltage amplitude in each mode
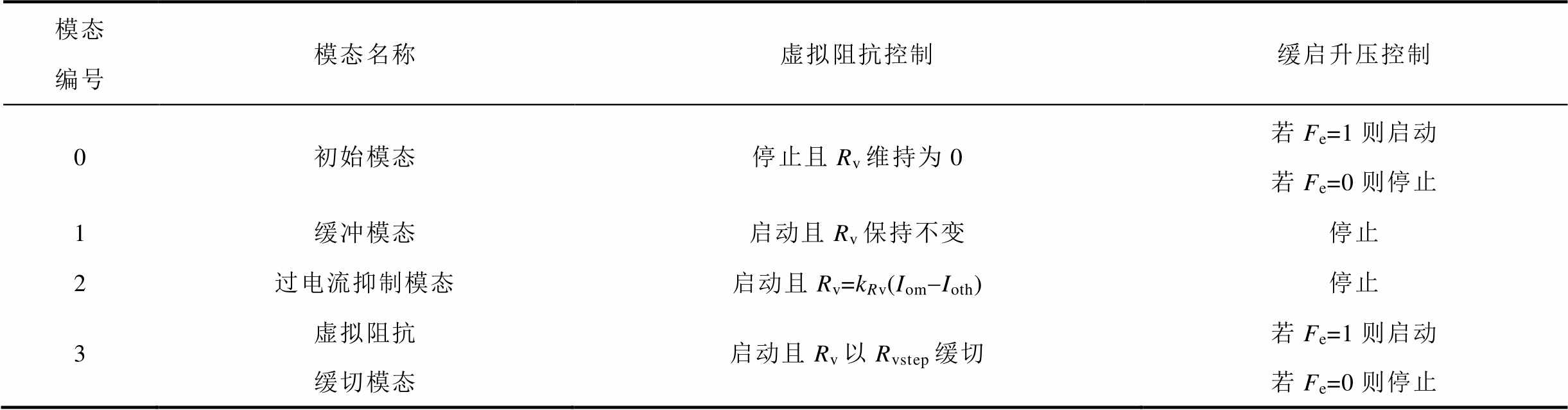
模态编号模态名称虚拟阻抗控制缓启升压控制 0初始模态停止且Rv维持为0若Fe=1则启动若Fe=0则停止 1缓冲模态启动且Rv保持不变停止 2过电流抑制模态启动且Rv=kRv(Iom-Ioth)停止 3虚拟阻抗缓切模态启动且Rv以Rvstep缓切若Fe=1则启动若Fe=0则停止
本文以图4b所示的工况为例,分析所提方法抑制并联冲击电流的过程。在该工况下,当逆变器Inv2并入PCC端时,Ebs2>Ebs1。其他工况下的过电流抑制过程与之类似。
1.3.1 系统等效电路建模
引入虚拟阻抗后的等效电路如图6所示。图6中,逆变器Inv2在t1时刻并入PCC端,此时逆变器Inv1和Inv2的黑启动电压ebs1和ebs2分别表示为 ∠
∠ 和
和 ∠
∠ 。为了降低计算逆变器输出电流io1和io2的复杂度,作如下两点假设:①由于io1和io2的时域表达式与PCC端的负载类型相关,本文以电阻负载Rload为例进行分析;②由于线路电感Lline的存在,当逆变器Inv2并入PCC端时,io1和io2中会包含零输入响应分量,导致求解其最大值时需构建超越方程,因此,本文忽略Lline,仅考虑线路电阻Rline。上述简化将带来两个优点:①等效电路中不含电感元件,io1和io2可直接采用正弦稳态计算,避免了复杂的时域分析;②由于忽略了Lline,代入计算的线路阻抗小于实际值,使得计算出的电流幅值大于实际值,从而为后续参数设计提供了裕度,确保了系统在实际运行时的可靠性。
。为了降低计算逆变器输出电流io1和io2的复杂度,作如下两点假设:①由于io1和io2的时域表达式与PCC端的负载类型相关,本文以电阻负载Rload为例进行分析;②由于线路电感Lline的存在,当逆变器Inv2并入PCC端时,io1和io2中会包含零输入响应分量,导致求解其最大值时需构建超越方程,因此,本文忽略Lline,仅考虑线路电阻Rline。上述简化将带来两个优点:①等效电路中不含电感元件,io1和io2可直接采用正弦稳态计算,避免了复杂的时域分析;②由于忽略了Lline,代入计算的线路阻抗小于实际值,使得计算出的电流幅值大于实际值,从而为后续参数设计提供了裕度,确保了系统在实际运行时的可靠性。
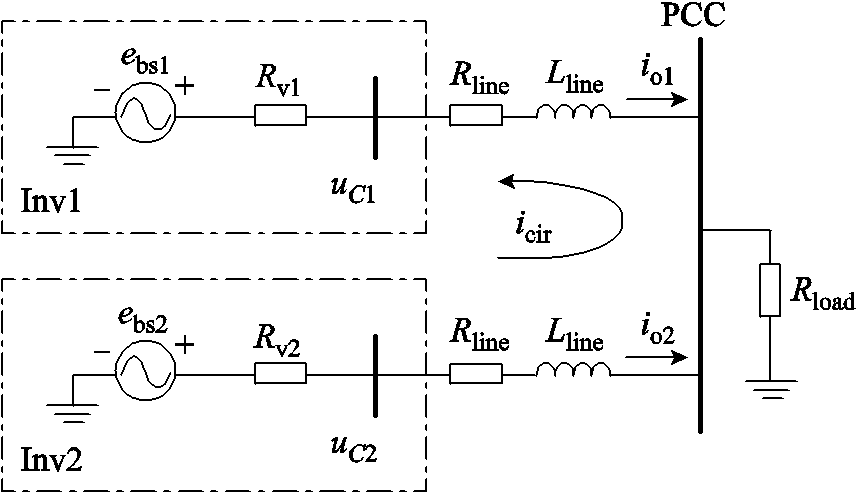
图6 逆变器并联系统等效电路
Fig.6 Equivalent circuit of the parallel inverters
基于上述简化,逆变器Inv1和Inv2的输出电流分别为
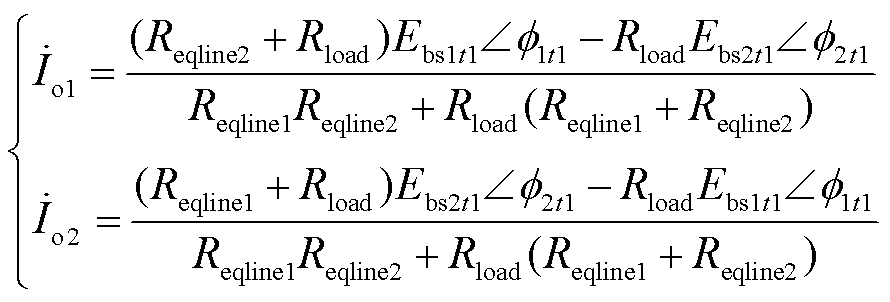 (1)
(1)
式中,Reqline1=Rline+Rv1,Reqline2=Rline+Rv2。
1.3.2 逆变器运行模态分析
根据式(1),若Rv1=Rv2=0,则输出电流幅值与黑启动电压幅值偏差的关系如图7所示。图7中,在Ebs2>Ebs1工况下,逆变器Inv2的输出电流幅值Iom2会随着电压幅值偏差的增大而增大,当其电流幅值超过Ioth时,将启动模态2。对应于图4b,当逆变器Inv2在t1时刻并入PCC端时,若电压偏差Ebs2t1-Ebs1t1使得Iom2>Ioth,那么逆变器Inv2将启动模态2。根据表1,此时虚拟阻抗Rv2为
 (2)
(2)
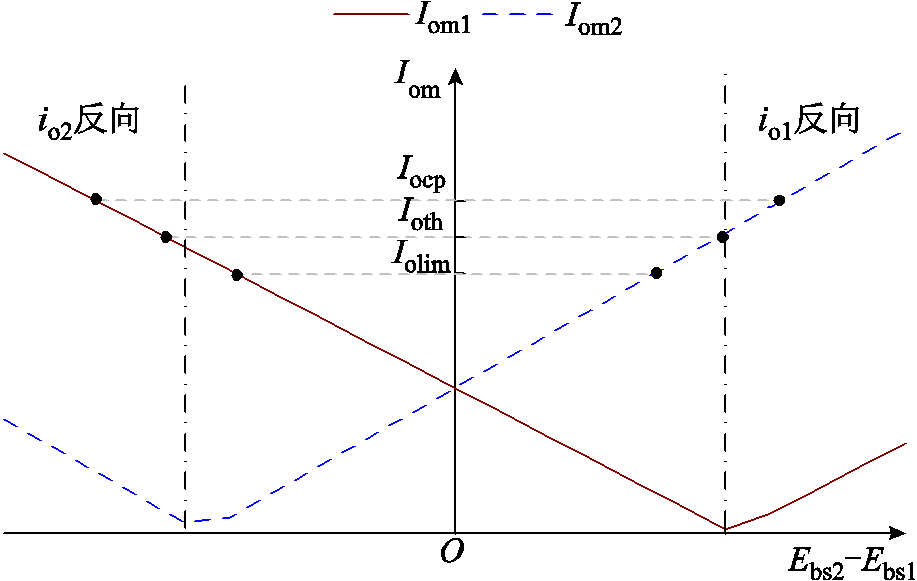
图7 逆变器输出电流幅值随黑启动电压幅值偏差的变化曲线
Fig.7 The relation between inverter output current amplitude and voltage amplitude difference
然后,又根据图3,Rv2的存在会产生虚拟压降ERv2,使得电压幅值偏差从Ebs2t1-Ebs1t1降低为(Ebs2t1-ERv2) -Ebs1t1,以实现对逆变器Inv2的过电流抑制。然而,在幅值偏差降低后,逆变器Inv1是否维持在模态0或启动模态2,则需进一步讨论。
假设逆变器Inv1仍然维持在模态0,其条件是输出电流幅值的最大值Iom1max<Iolim。根据式(1),当相位差f1-f2=p时,输出电流幅值达到最大,即
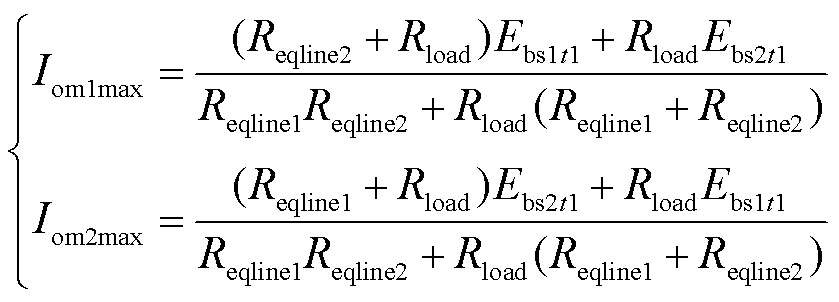 (3)
(3)
结合式(2)和式(3)可知,在逆变器Inv2启动模态2之后,逆变器Inv1维持在模态0的条件为
 (4)
(4)
式中,Reqload=Rload+Rline,Ebst1sum=Ebs1t1+Ebs2t1。另外,从图4中可知,Ebs1t1=EIolim=ReqloadIolim,并且结合式(4)可知,kRv应小于无穷大。这表明,在逆变器Inv2启动模态2之后,逆变器Inv1始终维持在模态0。这一结论也可以推广到n台逆变器并联系统。已经并联在PCC端的n-1台逆变器的输出电压可视为相等,均为Ebs(n-1)t1∠f(n-1)t1。根据戴维南等效定理,n-1台逆变器并联系统可以等效成输出电压为Ebs(n-1)t1∠f(n-1)t1,线路电阻为Rline/(n-1)的单台逆变器。在t1时刻,当逆变器Invn并入PCC端时,系统的等效电路仍如图6所示,只是在式(4)中有
 (5)
(5)
同时根据缓启升压规则,有
 (6)
(6)
将式(5)和式(6)代入式(4),可知kRv仍小于无穷大,即Inv1~Inv(n-1)仍维持在模态0。
另外,这一结论也可以根据图7进行定性解释。当io2反向时,逆变器Inv1才有可能启动模态2。根据图6并结合式(1),可知PCC电压幅值最大值UPCCmax为
 (7)
(7)
根据数学关系,若Ebs2t1>Ebs1t1,Ebs2t1会始终大于UPCCmax。这表明io2始终维持正向,也就是Inv1不会启动模态2,而是始终维持在模态0。
1.3.3 过电流抑制波形
根据1.3.2节分析,电阻负载下,所提方法的过电流抑制波形如图8所示,其中Mode代表逆变器的运行模态。在t1~t2阶段,逆变器Inv2并入PCC端并进行过电流抑制,其会首先工作在过电流抑制模态(模态2)以抑制并联冲击电流,之后便在缓冲模态(模态1)和虚拟阻抗缓切模态(模态3)之间切换或仅运行在虚拟阻抗缓切模态(模态3),直到t2时刻虚拟阻抗Rv2=0;而之前已经并联到PCC端的逆变器Inv1,则始终工作在初始模态(模态0)。
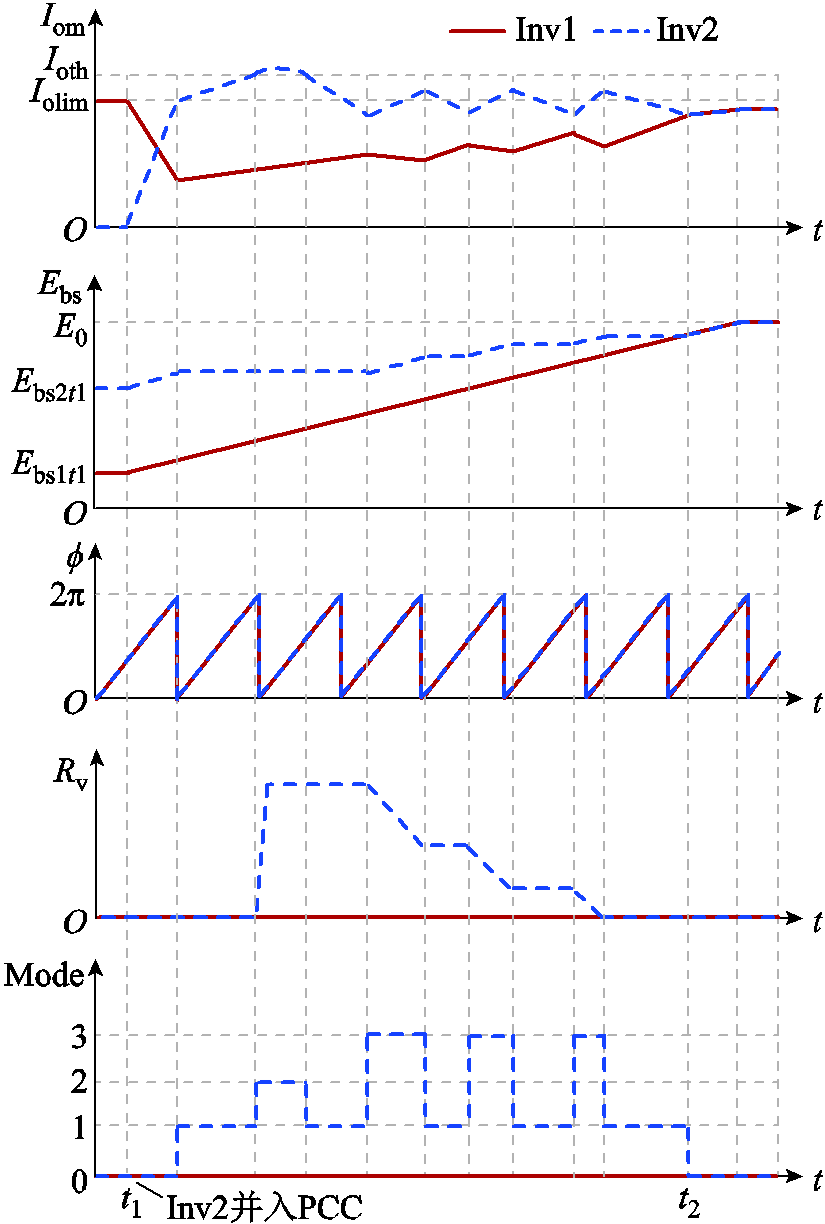
图8 电阻负载下,逆变器并联系统过电流抑制波形
Fig.8 The waveforms of overcurrent suppression in parallel inverters under resistor load
下面继续分析t1~t2阶段中,逆变器Inv2输出电流幅值Iom2的变化规律。当逆变器Inv2运行在模态1时,黑启动电压幅值Ebs2维持不变,使得逆变器间的黑启动电压幅值偏差Ebs2-Ebs1下降,又由于虚拟阻抗Rv2也维持不变,因此根据式(1)可知,逆变器Inv2输出电流幅值Iom2下降。当逆变器Inv2运行在模态3时,黑启动电压幅值Ebs2也以步长Ustep抬升,使得Ebs2-Ebs1保持动态不变,又由于Rv2以步长Rvstep减小,因此根据式(1)可知,输出电流幅值Iom2上升。
如果逆变器Inv2在模态1和模态3的切换过程中,其输出电流幅值Iom2始终满足Iom2<Ioth,则逆变器Inv2不需要再次启动模态2以抑制过电流。这使得Rv2可单调地缓切到0,不会出现振荡。在Rv2缓切到0之后(即t2时刻之后),Ebs1和Ebs2均以步长Ustep抬升,直到Ebs1=Ebs2=E0时,黑启动结束。
特别地,若在t1~t2阶段,逆变器Inv2模态2投入的虚拟阻抗较大或模态3的缓切步长较小,使得Inv2的输出电流幅值Iom2始终满足Iom2<Iolim,那么Inv2将始终运行于模态3,直至Rv2缓切至0。
最后,当负载为其他类型时,比如感性或非线性负载,其分析过程与本节相似,即当逆变器过电流时,将首先启动模态2,通过提高虚拟阻抗来抑制过电流;然后在模态1和模态3的配合下,将虚拟阻抗单调缓切至0。
缓启升压限流值Iolim是根据逆变器三相开关网络的电流应力以及储能装置的最大输出功率来选取的,可在避免逆变器开关网络因过电流而损坏的同时防止储能装置过充过放。Iolim表达式为
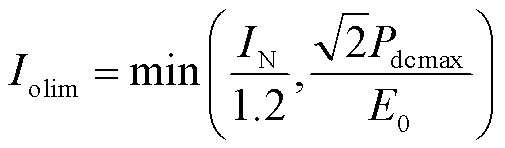 (8)
(8)
式中,IN为开关网络的额定电流;Pdcmax为储能装置的最大输出功率。虽然在黑启动过程中,黑启动电源的输出电压或输出功率是变化的,但这些时变性参数对Iolim的选择无影响,即Iolim是一个定值。
2.2.1 稳定性分析
与逆变器并网应用不同,在逆变器离网应用中,由于PCC端缺乏电网支撑[27-30],需要在控制中引入电压内环来提升逆变器对输出电压的控制性能。本文采用的电压内环控制结构如图9所示。图9中,电压调节器采用PR控制器GPR(s),电流调节器采用比例控制器kpi。此外, ,G1(s)=1/(sLf+ Rf),G2(s)=1/(sCf)。
,G1(s)=1/(sLf+ Rf),G2(s)=1/(sCf)。

图9 电压内环控制结构
Fig.9 Control structure of inner voltage loop
在图9中存在以下关系:
 (9)
(9)
式中, 为逆变器输出电压;
为逆变器输出电压; 为逆变器给定输出电压;Gcl(s)为给定增益;Zout(s)为输出阻抗。Gcl(s)和Zout(s)分别为
为逆变器给定输出电压;Gcl(s)为给定增益;Zout(s)为输出阻抗。Gcl(s)和Zout(s)分别为
 (10)
(10)
 (11)
(11)
基于文献[32]的建模思路并引入Gcl(s)以及Zout(s),建立包含电压内环的完整虚拟阻抗环小信号模型,如图10所示。图10中,UPCCab为PCC端电压的a、b轴分量,上角标“*”表示共轭,上标“ ”表示小信号分量,虚拟阻抗分量为
”表示小信号分量,虚拟阻抗分量为
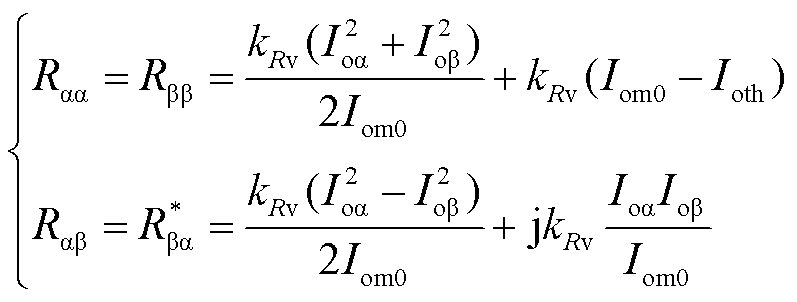 (12)
(12)
式中,Iom0为逆变器稳态工作点的电流幅值。图10中,虚拟阻抗环内部存在一个耦合环Gc(s),该耦合是由电流幅值计算引入的。为确保系统稳定,需首先保证Gc(s)稳定,再保证虚拟阻抗环TAVI(s)稳定。
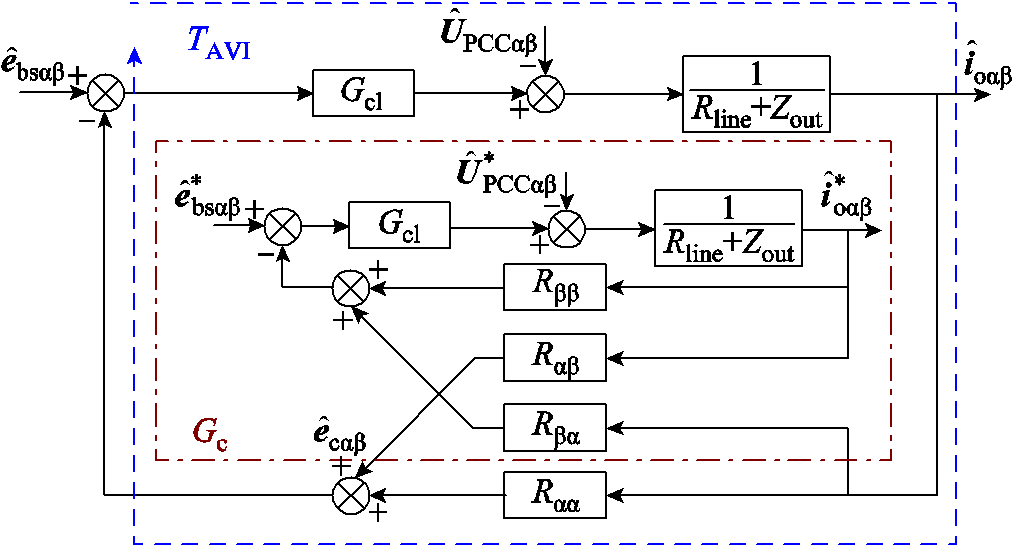
图10 包含电压内环的完整虚拟阻抗环小信号模型
Fig.10 The small-signal model of the virtual impedance loop consisting of the inner voltage loop
耦合环Gc(s)为
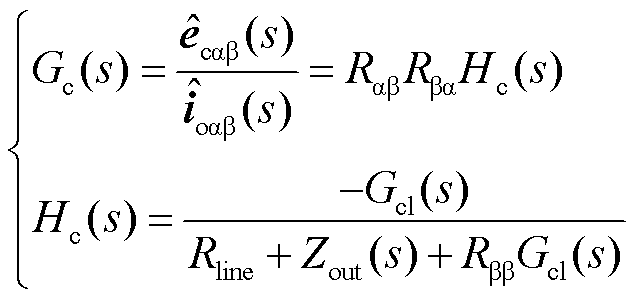 (13)
(13)
式中,ecab(s)为耦合压降。由于RabRba为常数,不存在右半平面极点,因此仅需通过分析Hc(s)的开环传递函数Tc (s)即可确定耦合环的稳定性。Tc(s)为
 (14)
(14)
基于实验参数(具体见3.1节),Tc(s)的相位裕度jc随kRv的变化曲线如图11所示。由图11可见,电压内环对耦合环的稳定性影响较小;同时,虚拟阻抗调节系数kRv的变化不会明显恶化耦合环的稳定性。
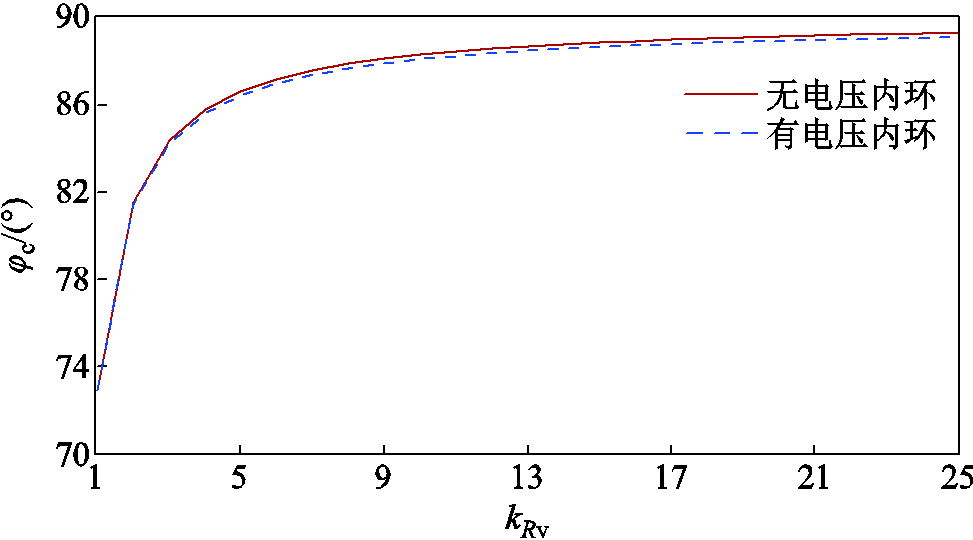
图11 耦合环Tc(s)的相位裕度jc-kRv变化曲线
Fig.11 The relation between phase margin jc and kRv
虚拟阻抗环的开环传递函数TAVI(s)为
 (15)
(15)
仍基于实验参数(具体见3.1节),TAVI(s)的相位裕度jAVI随kRv的变化曲线如图12所示。由图12可见,电压内环的引入使得维持环路稳定(即jAVI>0)的最大kRv降低,即内环恶化了虚拟阻抗环的稳定性;此外也可看到,随着虚拟阻抗调节系数kRv的增大,虚拟阻抗环的稳定裕度降低。kRv的选择应该保证环路稳定,即
 (16)
(16)
式中,kRvmax为保证环路临界稳定的虚拟阻抗调节系数限值。
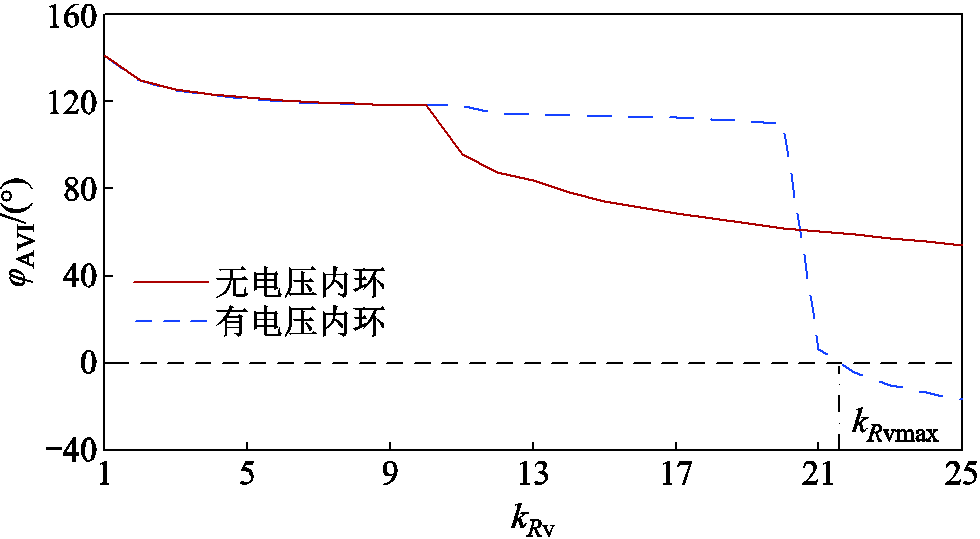
图12 虚拟阻抗环TAVI(s)的相位裕度jAVI-kRv变化曲线
Fig.12 The relation between phase margin jAVI and kRv
2.2.2 过电流抑制性能
为抑制图8中逆变器Inv2的过电流,式(3)中的Iom2max应小于Iocp。当Iom2=Iocp时,根据表1有
 (17)
(17)
结合式(3)和式(17),可得虚拟阻抗调节系数kRv的最小临界值kRvmin为
 (18)
(18)
为了避免图8中逆变器Inv2多次启动模态2,进而实现虚拟阻抗Rv2的单调变化,其需要满足的条件是:当逆变器Inv2启动1次模态3时,其输出电流幅值增量ΔIom2不大于Ioth-Iolim。结合式(1),该条件可表示为
 (19)
(19)
为了留有设计裕度,根据数学关系,令式(19)中的ΔIom2为
 (20)
(20)
结合式(20)和式(1)可知,当Ebs1和Ebs2之间的偏差最大且线路电阻Reqline2最小时,ΔIom2取得最大值ΔIom2max,即
 (21)
(21)
结合式(19)和式(21)可知Rvstep需使得
 (22)
(22)
当黑启动电压幅值存在偏差时,传统缓启升压方法下的仿真波形如图13a所示,其中ioa为a相输出电流,vCa为a相输出电压,仿真参数见表2。逆变器Inv2在tsyn时刻完成预同步后,Ebs2-Ebs1=-5 V;之后,进入同步开关延迟阶段(TREL)并启动缓启升压控制,由于TREL=50 ms,Ustep=0.02 V,fs=20 kHz,故Ebs2的增量为20 V;然后在t1时刻,Inv2并入PCC端,此时Ebs2-Ebs1=15 V,使得ioa2的最大幅值为7 A,超过了硬件过电流保护值Iocp=6 A,Inv2过电流。
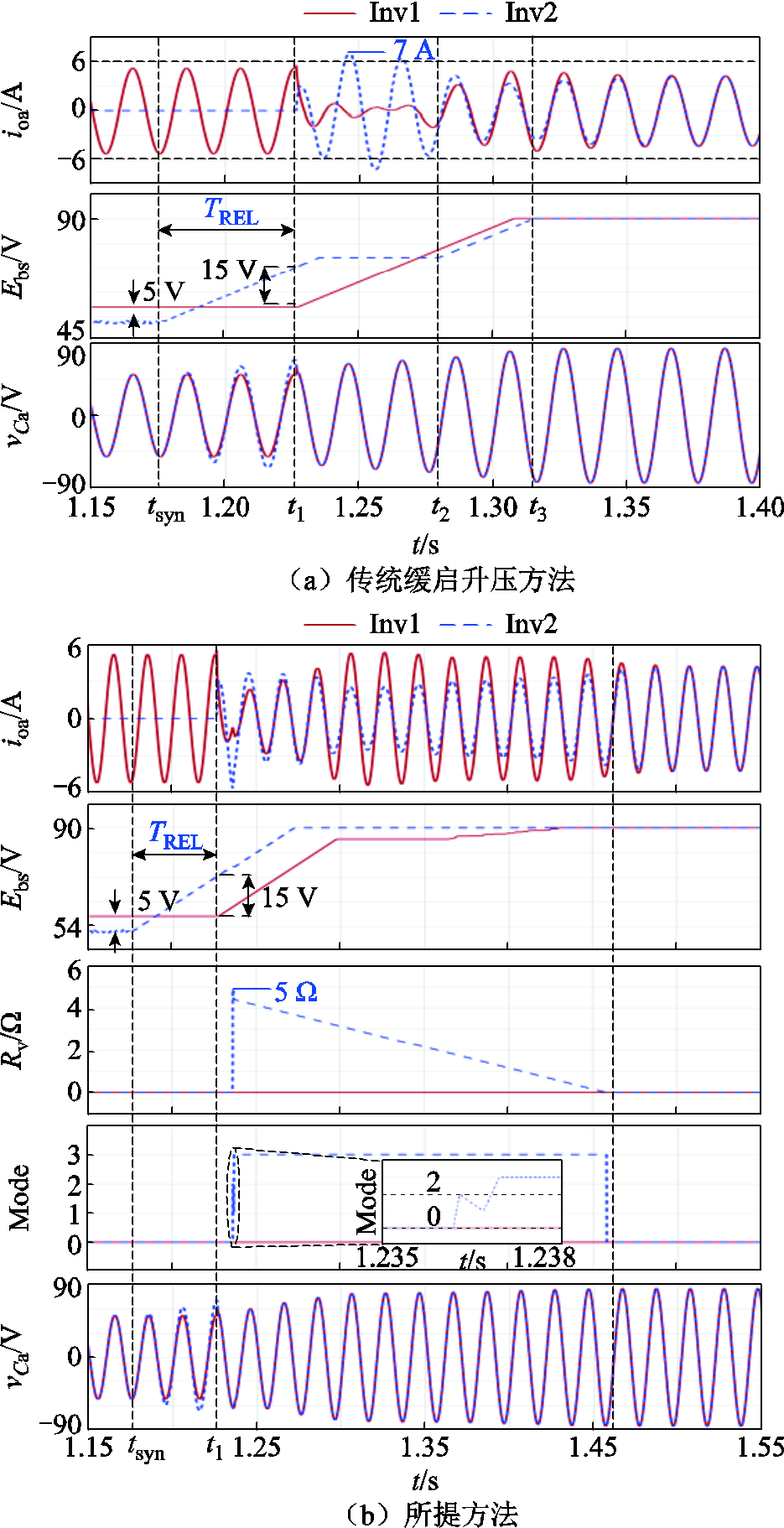
图13 黑启动电压幅值存在偏差时的仿真波形
Fig.13 Simulation waveforms with black-start voltage amplitude difference
表2 逆变器并联系统仿真和实验参数
Tab.2 Parameters of parallel inverters
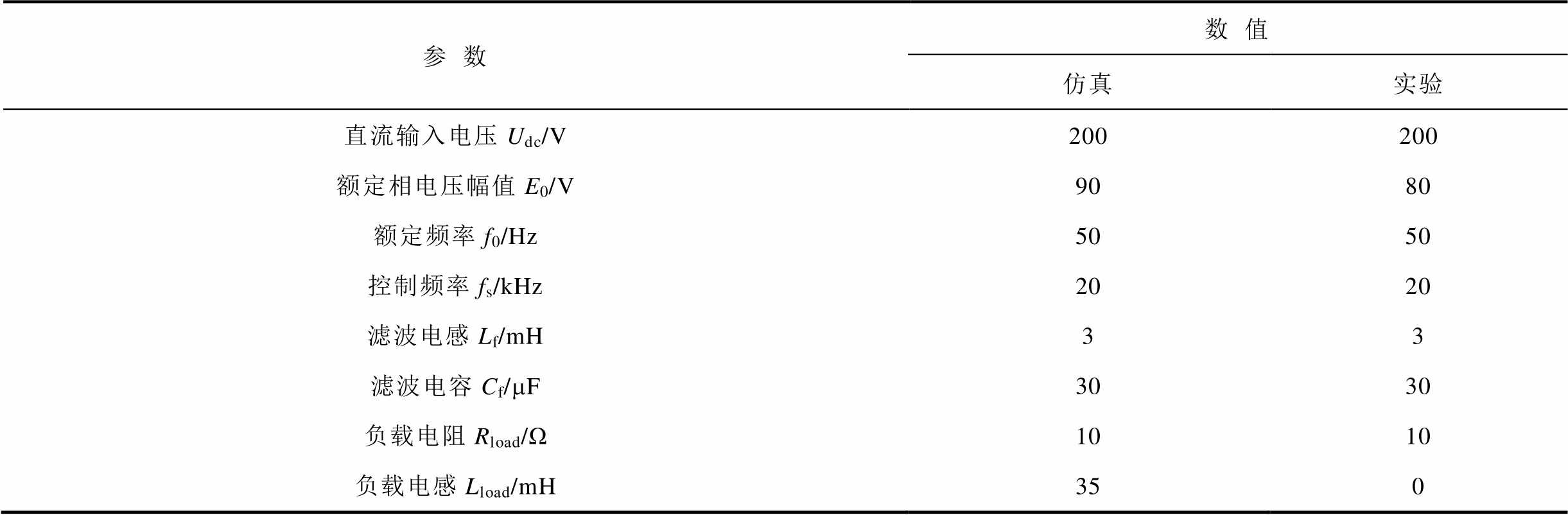
参数数值 仿真实验 直流输入电压Udc/V200200 额定相电压幅值E0/V9080 额定频率f0/Hz5050 控制频率fs/kHz2020 滤波电感Lf/mH33 滤波电容Cf/mF3030 负载电阻Rload/Ω1010 负载电感Lload/mH350
(续)
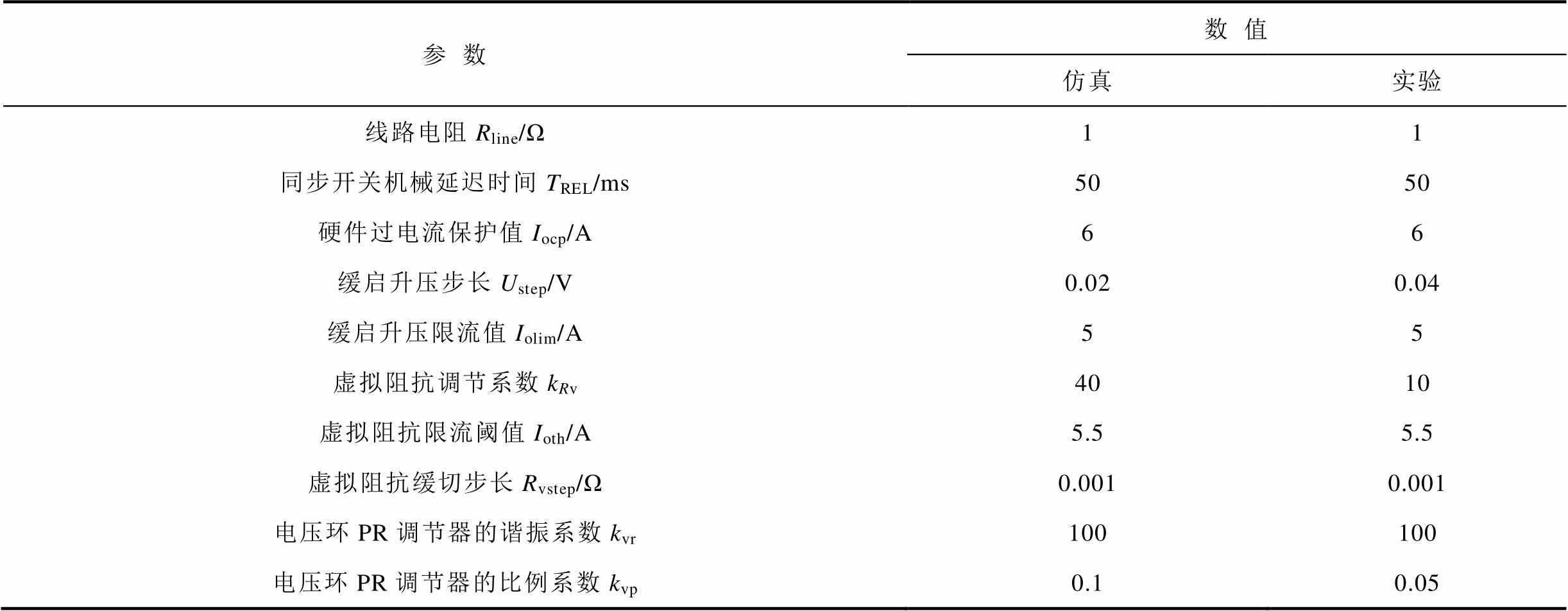
参数数值 仿真实验 线路电阻Rline/Ω11 同步开关机械延迟时间TREL/ms5050 硬件过电流保护值Iocp/A66 缓启升压步长Ustep/V0.020.04 缓启升压限流值Iolim/A55 虚拟阻抗调节系数kRv4010 虚拟阻抗限流阈值Ioth/A5.55.5 虚拟阻抗缓切步长Rvstep/Ω0.0010.001 电压环PR调节器的谐振系数kvr100100 电压环PR调节器的比例系数kvp0.10.05
在与图13a相同的工况下,采用所提方法得到的仿真波形如图13b所示。相比于图13a,在t1时刻,Inv2并入PCC端之后,其首先运行在模态2,将虚拟阻抗Rv2调节到5 Ω,使得ioa2的最大幅值小于Iocp,以抑制并联冲击电流,然后运行在模态3,直到Rv2为0;而逆变器Inv1则始终运行在模态0。
当黑启动电压相位不同步时,传统缓启升压方法下的仿真波形如图14a所示。在t1时刻,Inv2并入PCC端,两台逆变器的输出电压相位差为0.05 rad/s,使得两台逆变器的输出电流ioa1和ioa2的最大幅值均超过了硬件过电流保护值Iocp,两台逆变器均过电流。另外,由于ioa1和ioa2的幅值均超过缓启升压限流值Iolim,使得两台逆变器的缓启升压算法失效,Ebs1和Ebs2无法再进行缓启。
在与图14a相同的工况下,所提方法下的仿真波形如图14b所示。相比于图14a,在t1时刻,Inv2并入PCC端之后,首先运行在模态2,将虚拟阻抗Rv2调节到3 Ω,使ioa2的最大幅值小于Iocp,以抑制并联冲击电流,然后便在模态3和模态1之间切换,直到Rv2为0;而Inv1则始终运行在模态0。
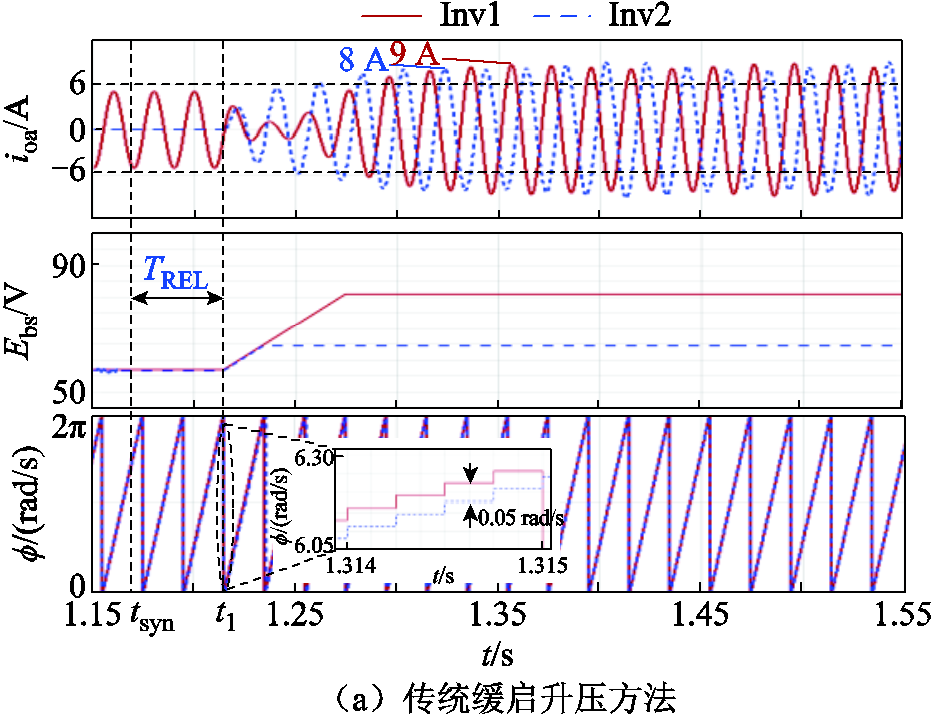
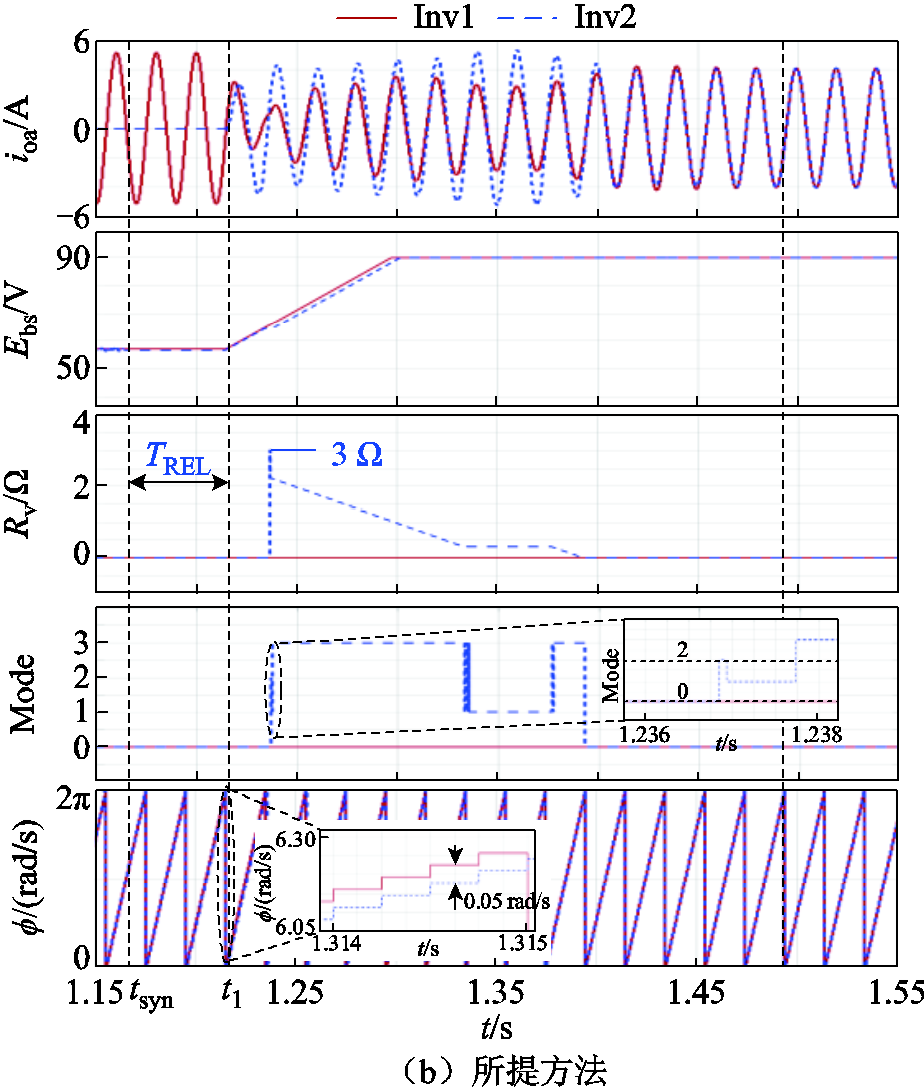
图14 黑启动电压相位不同步时的仿真波形
Fig.14 Simulation waveforms with black-start voltage phase asynchronization
电动机负载的仿真参数见表3。在不同方法下带电动机负载时的黑启动仿真波形如图15所示。图中,Nr为电动机转速。若将PCC电压直接上升到额定值,其仿真波形如图15a所示。Inv1输出电流ioa1的最大幅值达到约12 A,大于逆变器硬件过电流保护值Iocp=6 A。
表3 电动机负载的仿真参数
Tab.3 Simulation parameters of motor load
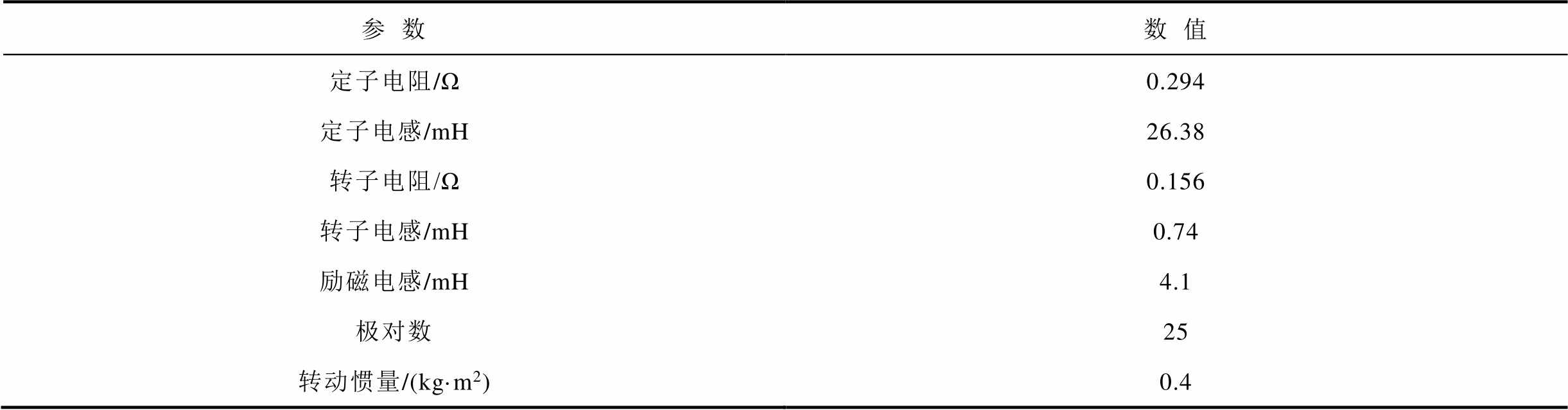
参数数值 定子电阻/Ω0.294 定子电感/mH26.38 转子电阻/Ω0.156 转子电感/mH0.74 励磁电感/mH4.1 极对数25 转动惯量/(kg·m2)0.4
若采用传统缓启升压方法,其仿真波形如图15b所示。在0~t0阶段,逆变器Inv1启动缓启升压控制,使得其黑启动电压幅值Ebs1缓慢上升,进而避免了浪涌电流。随后,逆变器Inv2在ts时刻启动并在tsyn时刻完成预同步,在经过同步开关S2的延迟阶段TREL后,在t1时刻并入PCC端。然而,预同步和同步开关延迟使得在t1时刻,逆变器Inv1和Inv2的黑启动电压幅值相差20 V,从而导致两台逆变器的输出电流ioa的最大幅值均超过Iocp,两台逆变器均过电流。
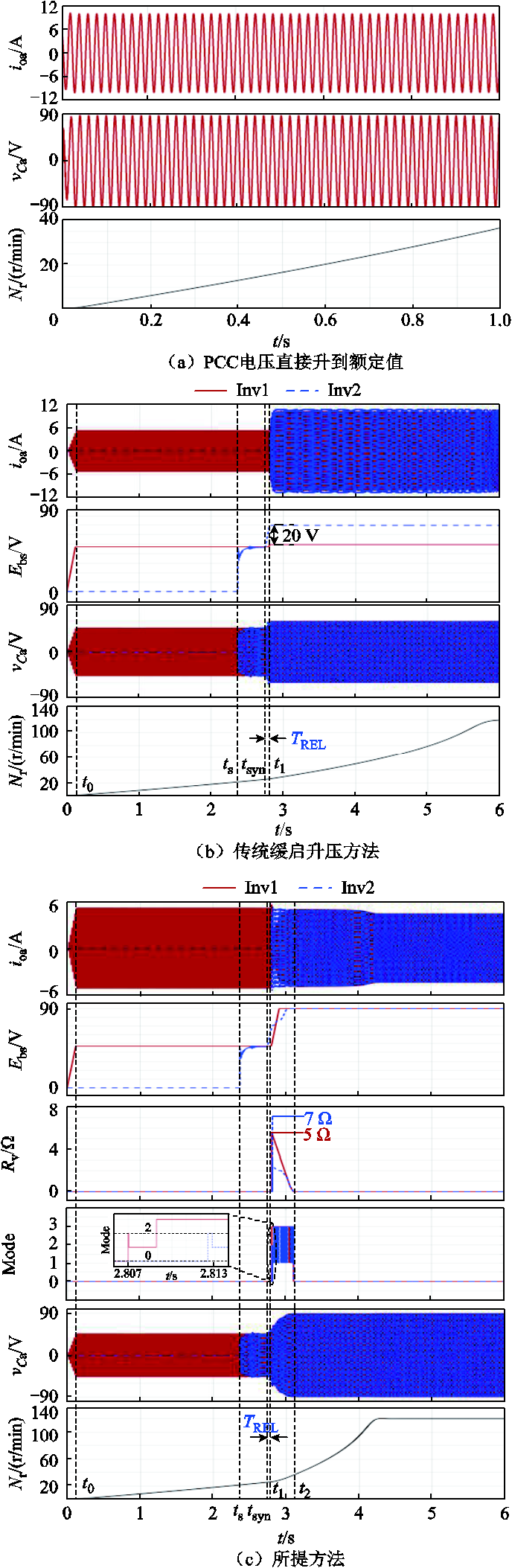
图15 带电动机负载时的黑启动仿真波形
Fig.15 Simulation waveforms of black-start under the motor load
若采用所提方法,其仿真波形如图15c所示。图中,除了在0~t0阶段避免逆变器Inv1启动时的浪涌电流外;在t1时刻,当逆变器Inv2并入PCC端时,两台逆变器分别启动自适应虚拟阻抗控制,虚拟阻抗分别为Rv1=5 Ω和Rv2=7 Ω,使得两台逆变器的输出电流ioa的幅值均小于Iocp,实现了过电流抑制;并且在t2时刻,虚拟阻抗均缓切到0;之后,当Ebs1=Ebs2=E0时,黑启动结束,电动机转速Nr达到120 r/min。
为验证所提黑启动方法的有效性,基于图2搭建了包含两台逆变器的并联系统实验平台,如图16所示,具体的实验参数见表2。实验中,两台逆变器的直流侧采用直流电压源来模拟储能装置,其最大输出功率为600 W且容量充足。同时,为了更好地观察过电流工况,设定的硬件过电流保护值Iocp小于实际值。
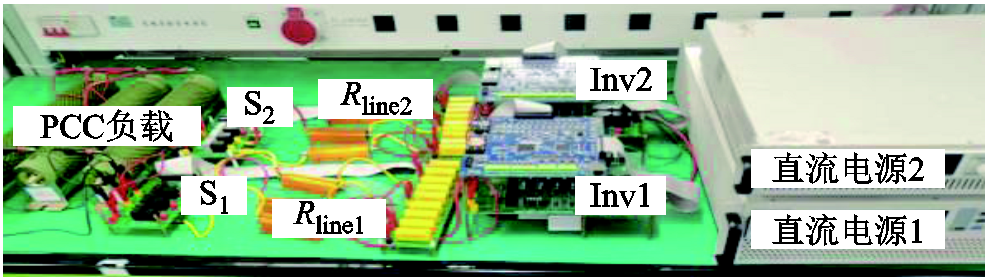
图16 逆变器并联系统实验平台
Fig.16 Experimental platform of parallel inverters
4.1.1 逆变器并入PCC端时电压幅值偏差工况
电压幅值偏差时缓启升压方法下的实验波形如图17所示。图17中,uCa1和uCa2分别为逆变器Inv1和Inv2的a相输出电压;ioa1和ioa2分别为两台逆变器的a相输出电流。在t1时刻之前,逆变器Inv1已完成缓启升压,ioa1的幅值为Iolim=5 A,uCa1的幅值约为50 V;同时,逆变器Inv2也完成了预同步,但是由于同步开关机械延迟时间的存在,uCa2的幅值增加到额定电压E0=80 V。在t1时刻,逆变器Inv2并入PCC端,ioa2的最大幅值为7 A,超过了设定的过电流保护值Iocp,Inv2过电流。
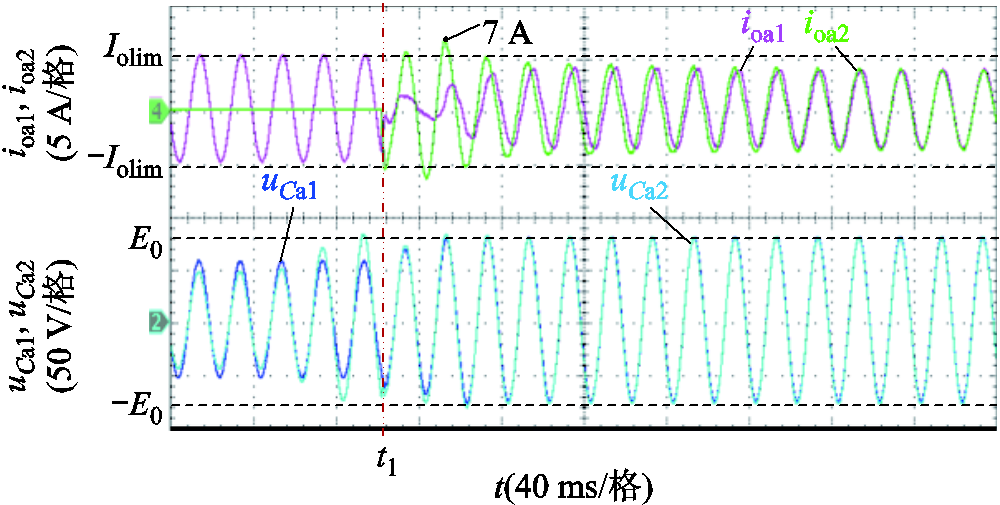
图17 电压幅值偏差时缓启升压方法下的实验波形
Fig.17 Experimental waveforms under the slow-voltage-rising method with the voltage amplitude difference
在与图17相同的工况下,采用所提方法的实验波形如图18所示。图18中,Mode2为逆变器Inv2的运行模态,其标识0、1、2、3代表图5中的模态编号;Rv2为逆变器Inv2的虚拟阻抗。在t1时刻之前,系统的运行工况与图17所示相同。不同的是,在t1时刻之后,逆变器Inv2首先运行在模态2,使虚拟阻抗Rv2增大到5 Ω,从而将ioa2的幅值限制在Iolim以下。随后,逆变器Inv2切换到模态1,然后切换到模态3,Rv2开始以步长Rvstep进行缓切。在缓切过程中,ioa2的幅值始终小于Iolim。因此,所提方法可在电压幅值偏差工况下,抑制逆变器Inv2过电流。
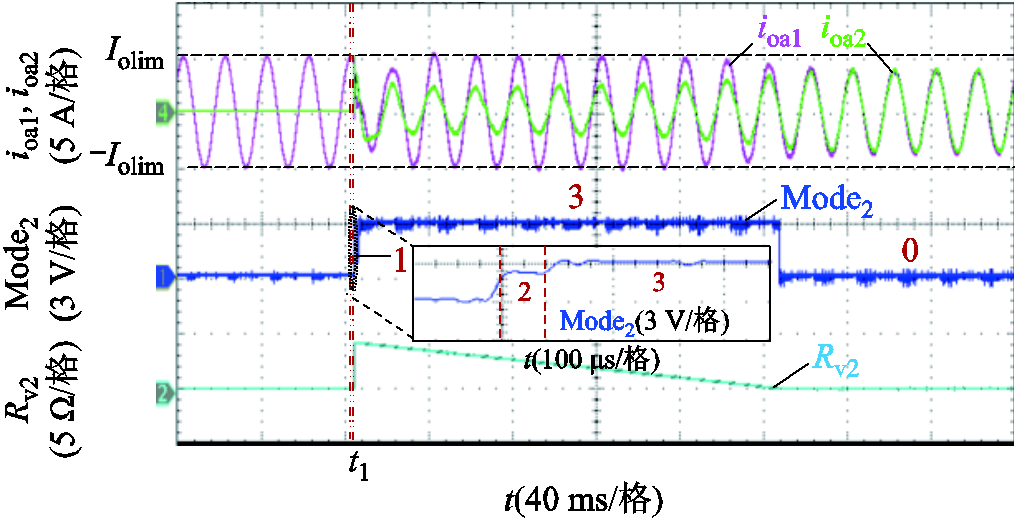
图18 电压幅值偏差时所提方法下的实验波形
Fig.18 Experimental waveforms under the proposed method with the voltage amplitude difference
4.1.2 逆变器并入PCC端时电压相位不同步工况
电压相位不同步时缓启升压方法下的实验波形如图19所示。其中,在t1时刻,当逆变器Inv2并入PCC端时,逆变器输出电压之间存在约为10°的相位差。这使得在逆变器Inv2并入PCC端之后,ioa2的最大幅值达到8 A,超过了设定的过电流保护值Iocp,Inv2过电流。
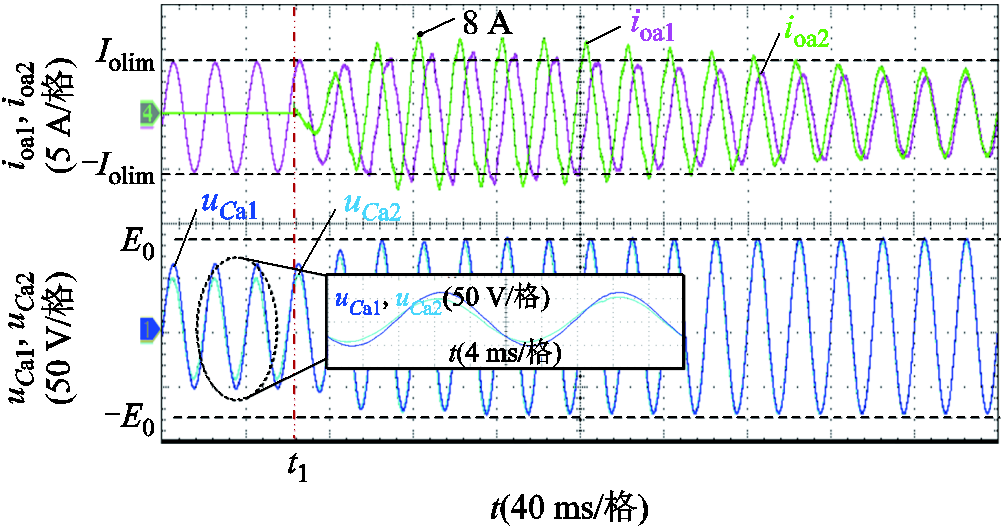
图19 电压相位不同步时缓启升压方法下的实验波形
Fig.19 Experimental waveforms under the slow-voltage-rising method with the voltage phase asynchronization
在与图19相同的工况下,采用所提方法的实验波形如图20所示。在t1时刻之前,系统的运行工况与图19相同。在t1时刻之后,逆变器Inv2首先运行在模态2,使Rv2增大到8 Ω,从而将ioa2的幅值限制在Iolim以下。随后,逆变器Inv2切换到模态1,然后切换到模态3,Rv2开始以步长Rvstep进行缓切。在缓切过程中,ioa2的幅值始终小于Iolim。因此,所提方法可在电压相位不同步工况下,抑制逆变器Inv2过电流。
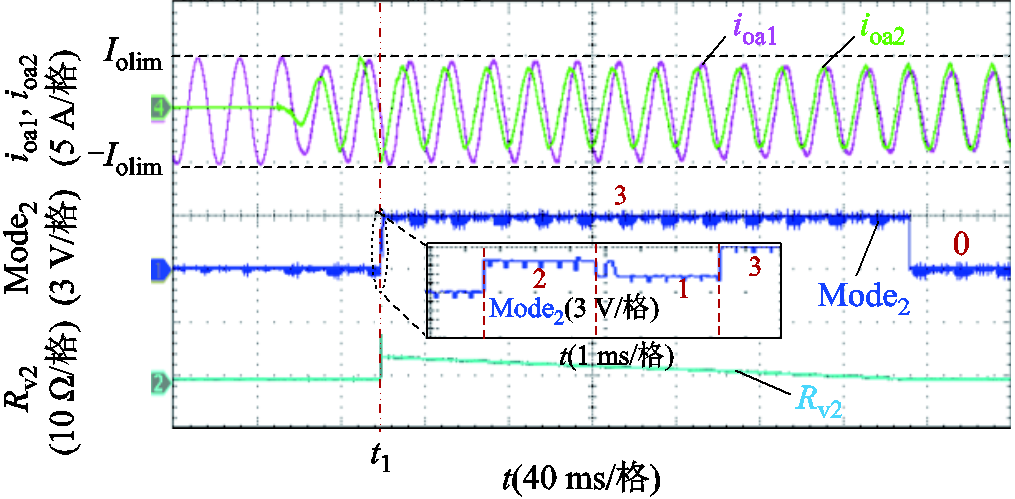
图20 电压相位不同步时所提方法下的实验波形
Fig.20 Experimental waveforms under the proposed method with the voltage phase is asynchronization
在与图19相同的工况下,采用文献[27-30]中提到的将虚拟阻抗直接置0的限流方式,得到实验波形如图21所示。相比于图20,在过电流抑制过程中,逆变器Inv2的模态2被多次启动,导致Rv2振荡。
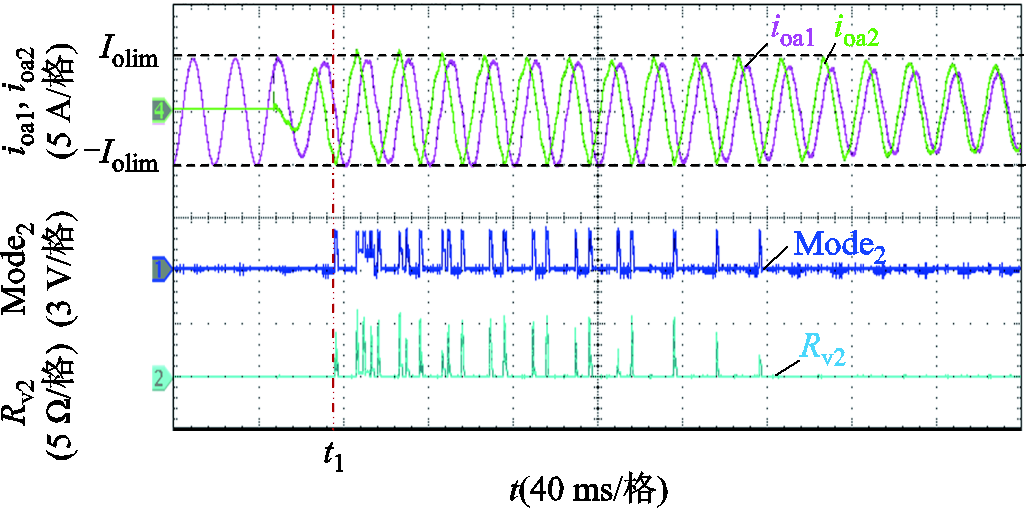
图21 虚拟阻抗直接置零限流方式下的实验波形
Fig.21 Experimental waveforms when the virtual impedance is set zero directly
最后,将模态2的调节系数kRv调整到25,得到所提方法在虚拟阻抗环不稳定时的实验波形如图22所示。可见,逆变器的输出电流和输出电压出现振荡,系统变得不稳定,验证了2.2.1节分析的正确性。
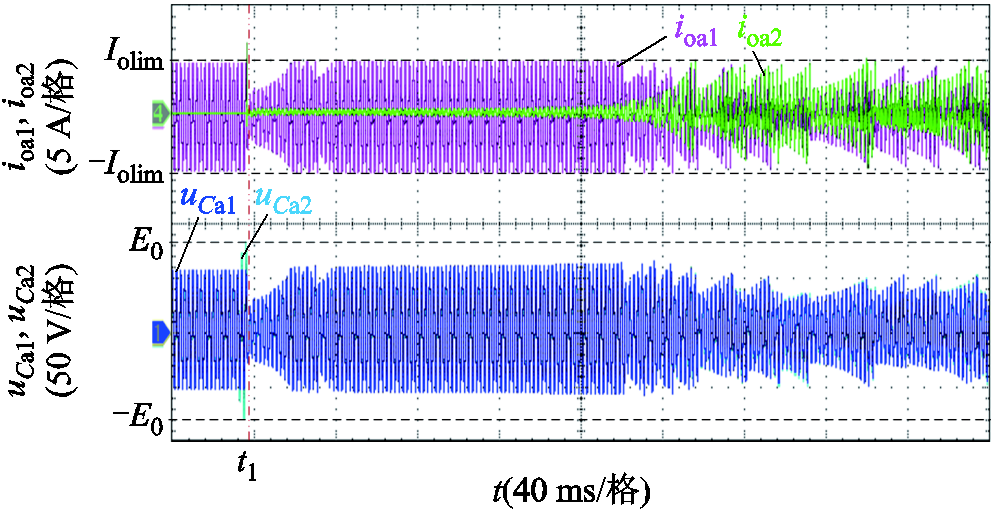
图22 虚拟阻抗环不稳定时的实验波形
Fig.22 Experimental waveforms when the virtual impedance loop is unstable
本文提出了一种基于自适应虚拟阻抗与缓启升压协同的黑启动控制方法,以提升逆变器在黑启动过程中的过电流抑制能力。首先,采用缓启升压方法抑制浪涌电流以及较大的负载电流;其次,采用所提自适应虚拟阻抗方法中的过电流抑制模态抑制并联冲击电流,同时采用缓冲模态和虚拟阻抗缓切模态消除虚拟阻抗振荡;然后,通过建立包含电压内环的完整虚拟阻抗环小信号模型,分析了过电流抑制模态的稳定性并指导其参数设计;最后,仿真与实验结果表明,当存在电压幅值偏差或电压相位不同步时,所提方法均可实现过电流抑制以及虚拟阻抗的单调缓切。
参考文献
[1] 顾雪平, 魏佳俊, 白岩松, 等. 基于分层模型预测控制的含风电电力系统恢复在线决策方法[J]. 电工技术学报, 2025, 40(5): 1471-1486. Gu Xueping, Wei Jiajun, Bai Yansong, et al. Online decision-making method for wind power integrated power system restoration based on hierarchical model predictive control[J]. Transactions of China Electro-technical Society, 2025, 40(5): 1471-1486.
[2] 蔡胜, 徐振钦, 谢云云, 等. 计及冷负荷启动时变特性的弹性配电网供电恢复[J]. 电工技术学报, 2025, 40(1): 139-151. Cai Sheng, Xu Zhenqin, Xie Yunyun, et al. A service restoration method for resilient distribution systems considering time-varying characteristic of cold load pickup[J]. Transactions of China Electrotechnical Society, 2025, 40(1): 139-151.
[3] 刘瀚琛, 王冲, 鞠平. 双碳背景下综合能源电力系统弹性分析与提升研究综述[J]. 电气工程学报, 2023, 18(2): 108-124. Liu Hanchen, Wang Chong, Ju Ping. Review on resilience analysis and enhancement of integrated energy power systems considering dual carbon goal[J]. Journal of Electrical Engineering, 2023, 18(2): 108-124.
[4] 杨金洲, 李业成, 熊鸿韬, 等. 新能源接入的受端电网暂态电压失稳高风险故障快速筛选[J]. 电工技术学报, 2024, 39(21): 6746-6758. Yang Jinzhou, Li Yecheng, Xiong Hongtao, et al. A fast screening method for the high-risk faults with transient voltage instability in receiving-end power grids interconnected with new energy[J]. Transactions of China Electrotechnical Society, 2024, 39(21): 6746-6758.
[5] Zhang Xiao, Wang Haocheng, Kang Fangrui, et al. Black start of multiple mobile emergency energy storage vehicles without communication[C]//2022 IEEE/IAS Industrial and Commercial Power System Asia (I&CPS Asia), Shanghai, China, 2022: 946-951.
[6] Schneider K, Tuffner F, Elizondo M, et al. Evaluating the feasibility to use microgrids as a resiliency resource[J]. IEEE Transactions on Smart Grid, 2016, 8(2): 1.
[7] Sharma A, Srinivasan D, Trivedi A. A decentralized multi-agent approach for service restoration in uncertain environment[J]. IEEE Transactions on Smart Grid, 2018, 9(4): 3394-3405.
[8] Sun Lei, Lin Zhenzhi, Xu Yan, et al. Optimal skeleton-network restoration considering generator start-up sequence and load pickup[J]. IEEE Transactions on Smart Grid, 2019, 10(3): 3174-3185.
[9] Alobaidi A H, Fazlhashemi S S, Khodayar M, et al. Distribution service restoration with renewable energy sources: a review[J]. IEEE Transactions on Sustainable Energy, 2023, 14(2): 1151-1168.
[10] Zhao Jinquan, Zhang Qiang, Liu Ziwen, et al. A distributed black-start optimization method for global transmission and distribution network[J]. IEEE Transactions on Power Systems, 2021, 36(5): 4471-4481.
[11] 王敏, 李想, 潘永春, 等. 微电网黑启动研究综述[J]. 电力自动化设备, 2016, 36(3): 41-45, 59. Wang Min, Li Xiang, Pan Yongchun, et al. Overview of research on microgrid black-start[J]. Electric Power Automation Equipment, 2016, 36(3): 41-45, 59.
[12] 姚辰昊, 熊小玲, 冯定腾, 等. CSC海上风电送出系统的改进型孤岛运行与黑启动策略[J]. 电力系统自动化, 2025, 49(16): 153-165. Yao Chenhao, Xiong Xiaoling, Feng Dingteng, et al. Improved islanded operation and black-start strategy of offshore wind power transmission system with current source converter[J]. Automation of Electric Power Systems, 2025, 49(16): 153-165.
[13] 李鑫卓. 微电网运行控制与黑启动策略研究[D]. 广州: 华南理工大学, 2019. Li Xinzhuo. Research on operation control and black start strategy of microgrid[D]. Guangzhou: South China University of Technology, 2019.
[14] 蔡胜, 谢云云, 张玉坪, 等. 考虑移动应急电源配置的微电网顺序恢复方法[J]. 中国电机工程学报, 2023, 43(7): 2677-2689. Cai Sheng, Xie Yunyun, Zhang Yuping, et al. A sequential service restoration method for microgrids considering optimal allocation of mobile emergency generators[J]. Proceedings of the CSEE, 2023, 43(7): 2677-2689.
[15] 黄杏, 金新民, 马琳. 微网离网黑启动优化控制方案[J]. 电工技术学报, 2013, 28(4): 182-190. Huang Xing, Jin Xinmin, Ma Lin. An optimized island micro-grid black-start control method[J]. Transactions of China Electrotechnical Society, 2013, 28(4): 182-190.
[16] 顾雪平, 白岩松, 李少岩, 等. 电力系统黑启动恢复问题的研究评述[J]. 电工技术学报, 2022, 37(13): 3183-3200. Gu Xueping, Bai Yansong, Li Shaoyan, et al. Research review of power system black-start restoration[J]. Transactions of China Electrotechnical Society, 2022, 37(13): 3183-3200.
[17] 李建林, 邹菲, 游洪灏, 等. 构网型储能变流器自适应低电压穿越控制策略[J]. 电工技术学报, 2025, 40(9): 2724-2737. Li Jianlin, Zou Fei, You Honghao, et al. Adaptive low-voltage ride-through control strategy of grid-forming energy storage converter[J]. Transactions of China Electrotechnical Society, 2025, 40(9): 2724-2737.
[18] 李昊恒, 刘洋, 武艳秋, 等. 一种基于改进漏斗控制的构网型换流器故障电流限制策略[J/OL]. 电工技术学报, 2025: 1-14[2025-07-15]. https://link.cnki. net/doi/10.19595/j.cnki.1000-6753.tces.250574. Li Haoheng, Liu Yang, Wu Yanqiu, et al. A fault current limiting strategy for grid-forming converters based on improved funnel control[J/OL]. Transactions of China Electrotechnical Society, 2025: 1-14[2025-07-15]. https://link.cnki.net/doi/10.19595/j.cnki.1000-6753.tces.250574.
[19] Jain A, Saborio-Romano O, Sakamuri J N, et al. Virtual resistance control for sequential green-start of offshore wind power plants[J]. IEEE Transactions on Sustainable Energy, 2022, 13(3): 1420-1429.
[20] 姚凌君, 袁雨诺, 杨永恒, 等. 电压源型分布式电源黑启动构网控制及关键技术综述[J]. 电网技术, 2025, 49(7): 2702-2711. Yao Lingjun, Yuan Yunuo, Yang Yongheng, et al. Review of grid-forming control and key technologies for voltage-source distributed energy resources black-start[J]. Power System Technology, 2025, 49(7): 2702-2711.
[21] Alassi A, Ahmed K H, Egea-Alvarez A, et al. Transformer inrush current mitigation techniques for grid-forming inverters dominated grids[J]. IEEE Transactions on Power Delivery, 2023, 38(3): 1610-1620.
[22] 周旭, 杨博, 刘航, 等. 一种多储能变流器的启动方法、电力系统: CN115765421A[P]. 2023-03-07.
[23] 杨帆, 王换民. 虚拟同步发电机并机黑启动技术研究[J]. 电气传动, 2024, 54(2): 49-54. Yang Fan, Wang Huanmin. Implementation of parallel black start of virtual synchronous generator[J]. Electric Drive, 2024, 54(2): 49-54.
[24] 石荣亮, 张兴, 刘芳, 等. 基于虚拟同步发电机的孤立微网黑启动方案研究[J]. 太阳能学报, 2017, 38(10): 2857-2864. Shi Rongliang, Zhang Xing, Liu Fang, et al. Research of black-start schemes of isolated microgrid based on virtual synchronous generator[J]. Acta Energiae Solaris Sinica, 2017, 38(10): 2857-2864.
[25] Fix E, Banerjee A, Muenz U, et al. Investigating multi-microgrid black start methods using grid-forming inverters[C]//2023 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 2023: 1-5.
[26] Alassi A, Ahmed K, Egea-Alvarez A, et al. Modified grid-forming converter control for black-start and grid-synchronization applications[C]//2021 56th International Universities Power Engineering Conference (UPEC), Middlesbrough, United Kingdom, 2021: 1-5.
[27] Liu Teng, Wang Xiongfei, Liu Fangcheng, et al. A current limiting method for single-loop voltage-magnitude controlled grid-forming converters during symmetrical faults[J]. IEEE Transactions on Power Electronics, 2022, 37(4): 4751-4763.
[28] Qoria T, Gruson F, Colas F, et al. Critical clearing time determination and enhancement of grid-forming converters embedding virtual impedance as current limitation algorithm[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2020, 8(2): 1050-1061.
[29] 尚磊, 胡家兵, 袁小明, 等. 电网对称故障下虚拟同步发电机建模与改进控制[J]. 中国电机工程学报, 2017, 37(2): 403-412. Shang Lei, Hu Jiabing, Yuan Xiaoming, et al. Modeling and improved control of virtual synchronous generators under symmetrical faults of grid[J]. Proceedings of the CSEE, 2017, 37(2): 403-412.
[30] 李清辉, 葛平娟, 肖凡, 等. 基于功角与电流灵活调控的VSG故障穿越方法研究[J]. 中国电机工程学报, 2020, 40(7): 2071-2080, 2387. Li Qinghui, Ge Pingjuan, Xiao Fan, et al. Study on fault ride-through method of VSG based on power angle and current flexible regulation[J]. Proceedings of the CSEE, 2020, 40(7): 2071-2080, 2387.
[31] 陈鑫. 一种用于交流接触器的储能驱动机构设计与实现[D]. 伊宁: 伊犁师范大学, 2023. Chen Xin. Design and implementation of an energy storage drive mechanism for AC contactor[D]. Yining: YiLi Normal University, 2023.
[32] Wu Heng, Wang Xiongfei. Small-signal modeling and controller parameters tuning of grid-forming VSCs with adaptive virtual impedance-based current limitation[J]. IEEE Transactions on Power Electronics, 2022, 37(6): 7185-7199.
Abstract When the natural disasters cause the outage of power grid, the islanded AC microgrids are started to feed the loads fast. However, due to the lack of the communication links, it is difficult to share information among paralleled inverters interfacing distributed energy sources in the islanded AC microgrids and acknowledge the load information for each inverter. Thus, the inverters need to equip black-start capability. Overcurrent suppression is the key for a successful black-start. To improve the overcurrent suppression capability of the inverters in the black-start, this paper proposed a black-start control method for AC microgrids based on coordination between adaptive virtual impedance and slow-voltage-rising. In the proposed method, the surge current and overload current are suppressed by the slow-voltage-rising strategy. Additionally, when the inverter is connected to the point of the common coupling, the impulse current caused by the difference on the voltage amplitude and the asynchronization on the voltage phase, is suppressed by introducing the adaptive virtual impedance.
Specifically, the proposed method has four modes. In the initial mode, the virtual impedance is set as zero while the slow-voltage-rising control is activated; in the overcurrent suppression mode, the virtual impedance is regulated by a proportional controller to suppress the impulse current while the slow-voltage-rising control is inactivated; in the transition mode, the virtual impedance maintains constant while the slow-voltage-rising control is inactivated; in the virtual impedance slow-removal mode, the virtual impedance is removed step by step with the set virtual impedance step-length to eliminate the oscillation of the virtual impedance, while the slow-voltage-rising control is activated. Under the proposed method, the inverter with overcurrent first works on the overcurrent suppression mode, and then works on the switching between transition mode and virtual impedance slow-removal mode until initial mode; other inverters without overcurrent work on the initial mode all along. Meanwhile, to guide the design of the overcurrent suppression mode, an overall small-signal model of the virtual impedance loop consisting of inner voltage loop is built, which indicates that the inner voltage loop obviously deteriorates the stability of the virtual impedance loop. Additionally, the constrain of the current increase serves as the sufficient condition to design the virtual impedance removal-step length.
Simulation and experimental results which are inducted on the voltage amplitude difference and voltage phase asynchronization, both show that the proposed method can suppress overcurrent while achieving the smooth virtual impedance variation. Additionally, the special load, i.e., motor load and the stability analysis, is also verified by the simulation and experimental results, respectively.
The following conclusions can be drawn. Firstly, the proposed method suppresses the surge current and overload current by the slow-voltage-rising strategy, and the impulse current is suppressed by introducing the adaptive virtual impedance while the virtual impedance oscillation is also eliminated by the proposed transition mode and the virtual impedance slow-removal mode. Secondly, by building the small-signal model of the virtual impedance loop consisting of the inner voltage loop, the stability of the proposed method is analyzed and the overcurrent suppression mode is designed. Meanwhile, the virtual impedance removal-step length is also designed based on the constrain of the current increase.
keywords:Islanded AC microgrid, black-start, overcurrent suppression, adaptive virtual impedance, slow-rising voltage
DOI: 10.19595/j.cnki.1000-6753.tces.250737
中图分类号:TM46
国家重点研发计划资助项目(2023YFB2604600)。
收稿日期 2025-04-30
改稿日期 2025-07-16
吴啸尘 男,1995年生,博士研究生,研究方向为构网型逆变器并联控制与建模。E-mail:wxc7694923@stu.xjtu.edu.cn
刘 增 男,1984年生,教授,博士生导师,研究方向为面向可再生能源和储能的多变流器系统的控制与分析。E-mail:zengliu@xjtu.edu.cn(通信作者)
(编辑 李 冰)