图1 MMC型融冰装置拓扑结构和运行方式
Fig.1 Topology and operation mode of MMC-based deicing device
摘要 直流融冰装置是实现输电线路覆冰快速融冰的关键技术装备,对保障我国冰冻灾害频发地区电力系统安全稳定运行具有突出价值。其中,模块化多电平换流器(MMC)型直流融冰装置因其容量要求低、融冰高效、接线简单和无功需求低等显著优势,成为融冰技术发展的主要方向。然而,在现有直流电流控制方式下,MMC型直流融冰装置表现出明显的直流侧电压波动,进而导致环流增大、子模块电容电压不平衡等现象。为此,该文从控制系统角度出发,深入剖析直流电压波动的成因,提出一种基于调制直流电压取整与电流控制模式自适应切换的直流电流控制改进策略,并且引入电流状态监测机制,有效地控制实际融冰电流与参考值之间的稳态偏差。该方法可从根本上消除电压波动,通过逻辑控制实现直流电压质量的提升与融冰电流幅值工程要求的同步满足,且方案简便,无需额外硬件投入。仿真结果表明,所提方法能有效地抑制直流电压波动,改善MMC装置的环流和电容电压波动问题,验证了改进控制策略的可行性。
关键词:MMC型直流融冰 直流电压波动 直流电流控制 直流电流偏差 最近电平逼近调制
我国南方的冰冻灾害性天气极易造成输电线路覆冰,从而引起线路跳闸、断线、倒杆、导线舞动、绝缘子闪络等事故,严重影响电力系统的安全稳定运行[1-3]。以2008年的大范围凝冻灾害为例,持续的冰灾天气导致全国范围内36 740条线路和2 018座变电站跳闸,8 381座110~500 kV电塔倒塌或损坏,170个县(市)停电,直接经济损失超过150亿元[4]。为应对频繁发生的冰灾给电力系统基础设施带来的严重威胁,配置高效可靠的线路融冰装置已成为保障电网安全运行的关键措施之一。
我国电网广泛采用直流融冰装置对覆冰输电线路开展融冰作业,该装置通过将交流电转换为稳定、可调的直流电,并将其施加于覆冰线路上,依靠电流产生的焦耳热实现对线路的融冰[5]。目前,直流融冰装置主要分为电网换相换流器(Line Commutated Converter, LCC)型直流融冰装置与模块化多电平换流器(Modular Multilevel Converter, MMC)型直流融冰装置。LCC型直流融冰装置的研究开展相对较早,是目前应用最广泛的融冰方式。但LCC型直流融冰装置需要三绕组换流变压器、大量交直流滤波器以及并联电容器,占地面积大、不可移动,并且在触发角较大时,谐波含量高、波形质量差[6]。
与LCC型直流融冰装置相比,MMC型直流融冰装置具有控制灵活、谐波含量小、融冰效率高、接线方便、无功需求低等突出优势[7-8],在我国冰灾严重地区的输电线路融冰领域具有广阔的应用前景。其中,采用全桥子模块(Full Bridge Sub-Module, FBSM)的MMC可以灵活调节直流电压升降,具备较宽的电压和电流调节范围,从而适应不同线路长度和导线尺寸的融冰需求,是直流融冰的理想电源。此外,为了节省投资成本,非冰期MMC型直流融冰装置可以兼顾静止无功补偿器(Static Synchronous Compensator, STATCOM)使用,为变电站提供无功补偿,提高设备利用率。目前MMC型全桥直流融冰装置在我国南方电网具有广泛工程应用,典型工程包括[9]:2014年安顺110 kV纳雍变电站项目(容量12 MW,参数1 200 A/10 kV)、2019年遵义220 kV上坝变电站项目(容量26 MW,参数2 000 A/13 kV)、2020年遵义220 kV新蒲变电站项目(容量34 MW,参数2 000 A/17 kV)。上述装置投运后的运行数据表明,各站点设备在冬季覆冰条件下均能可靠地完成融冰任务,验证了该技术的区域适用性。
区别于常规MMC型高压直流(MMC-High Voltage Direct Current, MMC-HVDC)输电系统,融冰装置在控制结构中增设了直流电流控制环(MMC-HVDC输电系统中不具备),其通过改变调制时直流电压的大小精准控制融冰电流[10-11]。在此控制方式下,融冰装置直流电流环的输出难以使其调制直流电压为子模块额定电容电压的整数倍,造成直流电压出现约1个子模块电压幅值的波动。考虑到融冰装置的直流电压较小,1个子模块电容电压的波动将导致直流电压出现明显的谐波。但在实际工程应用中,由于电压波动对融冰过程中焦耳热产生的影响较小,因此电流控制的准确性是首要关注目标[12],研究重点主要集中在确保融冰电流达到一定水平以实现可靠的除冰效果,而对直流侧电能质量的关注相对较弱,直流侧电压波动问题往往容易被忽视[13]。目前,融冰装置在电能质量方面的规范主要集中于交流侧,要求注入系统公共连接点的谐波应符合国家标准GB/T 14549—1993《电能质量公用电网谐波》的相关规定,而对于直流侧的电压质量,目前尚未有明确的标准或技术规定。
然而,MMC型直流融冰装置的直流电压质量同样值得关注,直流电压波动将对MMC型直流融冰装置的稳定运行带来诸多不利影响。文献[14]指出,当MMC系统直流侧出现频率为ωh的电压波动时,桥臂内部将产生ωh±2kω(ω为工频角频率,k=1,2,…)分量的环流。由于现有主流控制策略多采用双频负序坐标系下的PI调节器,仅能有效抑制二倍频环流,对于其他频率的环流则无法进行有效抑制。环流的存在不仅会显著增加系统损耗、降低融冰效率,还会引起桥臂电流畸变,产生电流纹波,进一步加剧子模块电容电压的不平衡问题[15]。文献[16]也指出,直流母线电压波动将导致MMC上、下桥臂间电压分布不均,这正是引发环流的主要原因之一。此外,有研究表明,直流侧谐波具有明显的宽频特性,这些高频干扰不仅可能会影响电力电子器件的正常工作,引发控制器误动作,还会提高系统发生谐振的风险,威胁融冰装置的安全运行[17]。因此,深入研究MMC型融冰装置直流电压波动的本质机理,并在此基础上提出有效的抑制策略,有助于改善系统电能质量,提升系统的安全性与稳定性。
由于直流电压波动对融冰效果的直接影响相对有限,现有直流融冰装置的控制策略多聚焦融冰电流的精确调节,针对MMC型融冰装置直流电压波动问题的研究相对较少。参考直流系统在其他应用场景中的相关研究,直流电压波动的抑制主要通过增设一次设备与优化控制策略两方面实现。在增设一次设备层面,常见方法包括无源滤波和有源滤波两类[18]。然而,增加一次设备会带来设备体积增大、系统复杂度提升以及运行可靠性下降等问题,难以满足直流融冰装置在经济性与实用性方面的工程需求[19]。在优化控制策略方面,现有研究多聚焦柔性直流系统中由于交流电网不平衡或负荷波动引发的电压扰动问题[20-21]。然而,这些方案多数未结合MMC型直流融冰装置独有的运行机制与控制特性,缺乏专门针对其直流电压波动问题的控制设计,难以本质性地解决直流电压波动性问题。
对于MMC型直流融冰装置而言,从优化控制策略层面抑制直流电压波动更具经济性与可行性。本文结合融冰装置特有的直流电流控制结构,深入分析其直流电压波动产生的本质原因,并在此基础上提出一种改进的直流电流控制策略。该策略能够协调调制直流电压与子模块配置之间的离散矛盾,无需额外的硬件投入,实施简便,可有效地抑制直流电压波动,并确保融冰电流大小满足工程需求,具有良好的工程参考价值。
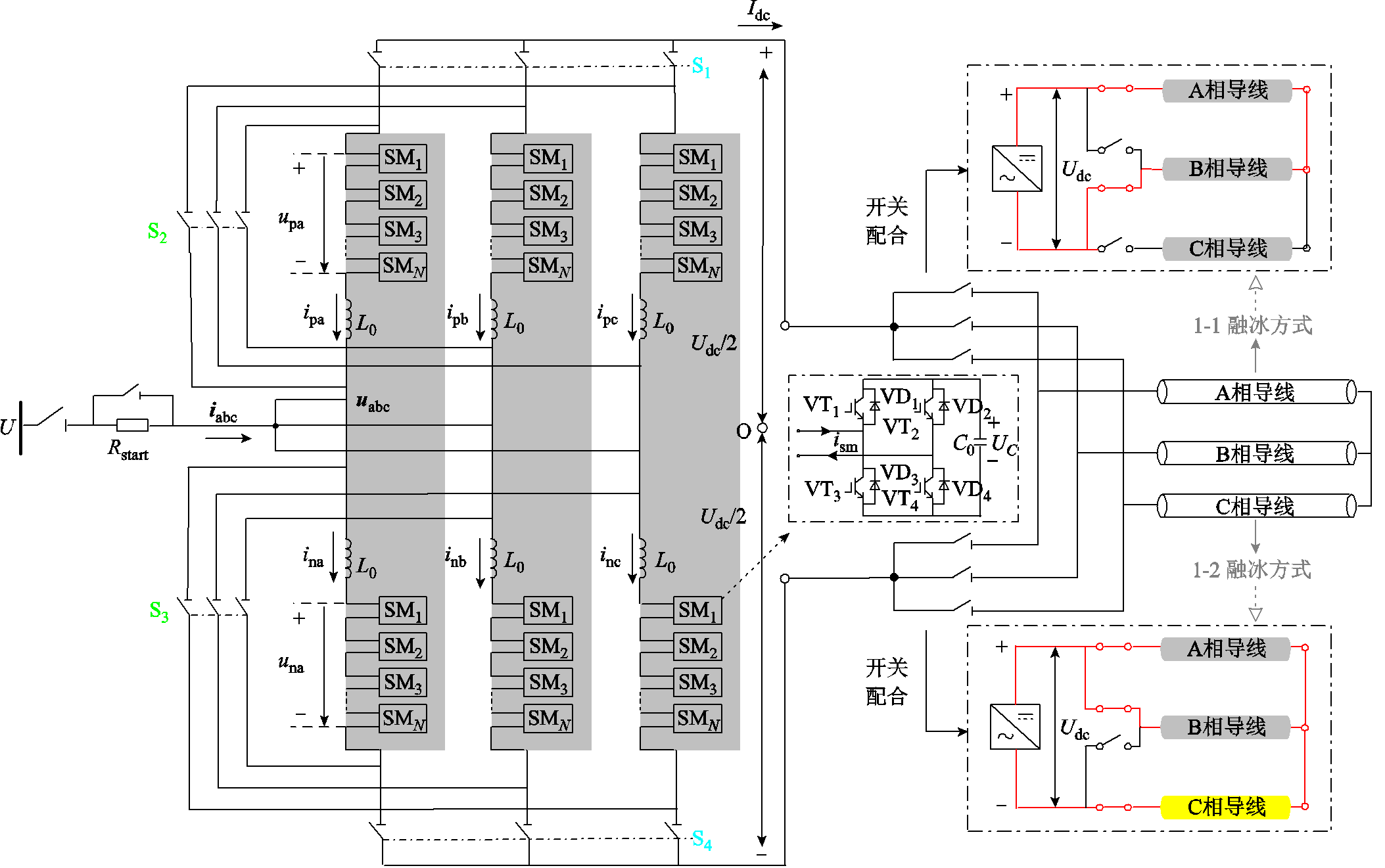
考虑到不同长度、电压等级线路所需的融冰电流大小不同,MMC型直流融冰装置采用全桥子模块(FBSM)构建,其系统拓扑和运行方式如图1所示。融冰装置由三个相单元组成,每个相单元分上、下两个桥臂,每个桥臂由N个子模块和1个桥臂电感串联而成。通过对子模块的IGBT器件进行控制,每个模块可输出正、负和零电平,从而实现直流电压从零到额定值的灵活调节。MMC型直流融冰装置可采用直挂主变压器低压母线的方式直接接入电网或接在换流变压器的低压侧,在结冰期可作为融冰装置使用(S1、S4闭合,S2、S3断开),在非冰期可作为静止无功补偿器(STATCOM)使用(S2、S3闭合,S1、S4断开)[22]。当作为融冰装置使用时,其接线方式可分为“1-1融冰方式”和“1-2融冰方式”两种,具体做法是将目标融冰线路的末端短路,通过线路首端隔离开关的配合将线路两相或三相接入融冰装置的直流侧[23]。
图1 MMC型融冰装置拓扑结构和运行方式
Fig.1 Topology and operation mode of MMC-based deicing device
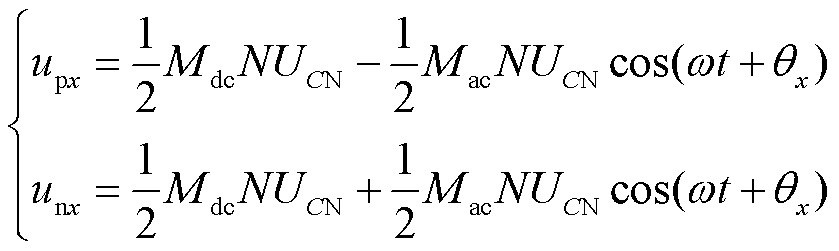
融冰装置在正常运行下,其交流侧的相电压幅值U可以表示为
 (1)
(1)
式中,UCN为子模块电容电压额定值;Mac为交流电压调制系数。
同时,定义直流电压调制系数为Mdc,则融冰过程中的直流电压Udc可表示为

 (2)
(2)
由基尔霍夫电压定律,忽略桥臂电感压降,可得交流电压、直流电压与桥臂电压间的关系为
 (3)
(3)
式中,x=a, b, c;ux为交流侧x相电压;u(p,n)x为桥臂x相电压,其中,下角标“p”为上桥臂,“n”为下桥臂。
根据式(1)~式(3),桥臂电压可写为
 (4)
(4)
式中,θx为x相交流电压的相位。
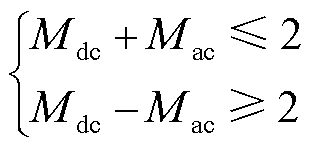
全桥式MMC型直流融冰装置的每个桥臂拥有N个子模块,因此单个桥臂的电压输出范围为
 (5)
(5)
结合式(4)和式(5),可以得到
 (6)
(6)
在融冰过程中要保证直流电压Udc>0即Mdc>0,同时直流电压Udc不能超过额定直流电压UdcN,因此根据式(6),Mdc可进一步改写为
 (7)
(7)
当融冰装置直挂母线时,Mac的大小是固定的,式(7)确定了融冰装置直流电压的调节范围,体现了MMC型直流融冰装置直流电压灵活可控的特点。
当前典型工业级MMC型直流融冰装置的运行容量普遍处于数十兆瓦级别,其直流侧额定电压通常在10~20 kV范围内。当装置以直挂方式接入较高电压等级的母线(即满足Mac Mdc工况)时,由式(4)的理论推导可知,换流器需具备更宽的桥臂电压调节裕度,从而要求每个桥臂配置更多数量的串联子模块。同时,较多的串联子模块还可显著抑制交流侧谐波,提高输出电压波形质量。因此,为适应不同电压等级下的接入需求,并确保输出电压波形的完整性,在工程实践中通常在每个桥臂中配置较多数量的串联子模块,并采用冗余子模块的配置方案。
Mdc工况)时,由式(4)的理论推导可知,换流器需具备更宽的桥臂电压调节裕度,从而要求每个桥臂配置更多数量的串联子模块。同时,较多的串联子模块还可显著抑制交流侧谐波,提高输出电压波形质量。因此,为适应不同电压等级下的接入需求,并确保输出电压波形的完整性,在工程实践中通常在每个桥臂中配置较多数量的串联子模块,并采用冗余子模块的配置方案。
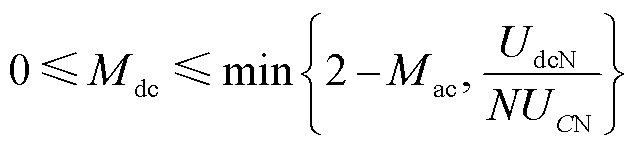
全桥型MMC型直流融冰装置仍采用双闭环控制系统,并依托其负电平输出能力构建独立的直流电流控制回路,从而实现交流侧与直流侧的解耦控制。MMC型融冰装置控制框图如图2所示。图2中,下角标“ref”代表参考值,整体控制系统可分为以下四个部分[7]。
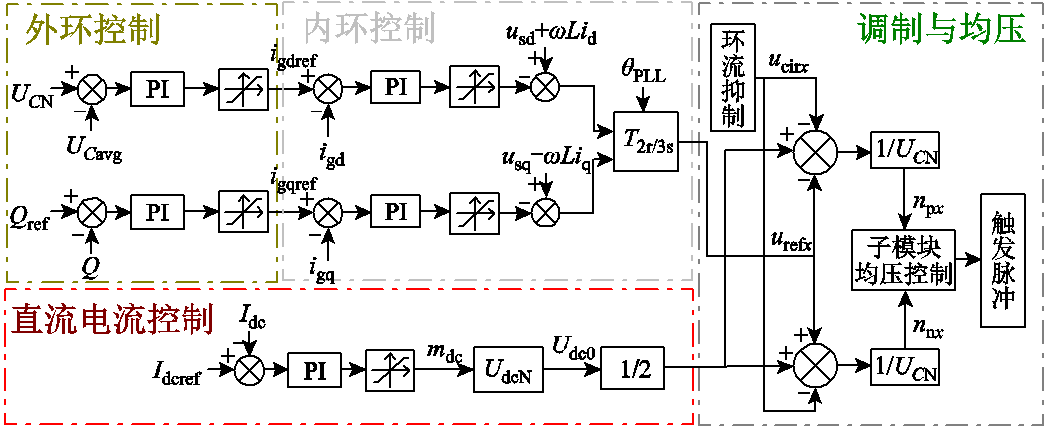
图2 MMC型融冰装置控制框图
Fig.2 Control block diagram of MMC-based de-icing device
1)外环控制
MMC型直流融冰装置的外环控制与传统MMC类似,按控制目标可分为有功控制和无功控制,其中有功控制目标为子模块电容平均电压UCavg,无功控制目标为系统的无功功率Q。
2)内环控制
内环电流通过控制差模电压使得dq轴电流跟踪外环控制输出的dq轴电流参考值,同时引入共模电压抑制内部环流中的二倍频分量。
3)直流电流控制
MMC型融冰装置具备独立调节直流侧电压的能力。通过在控制系统中引入直流电流控制环节,利用实际融冰电流Idc与其参考值Idcref之间的偏差,经由PI调节器生成调制系数mdc,从而确定参与调制的直流电压参考值Udc0。该控制机制使系统能够根据不同的融冰电流需求,灵活调节直流侧电压,mdc与Udc0的表达式为
 (8)
(8)
式中,Kp和Ki为直流电流控制器的PI参数;mdc为直流电流控制回路输出的调制系数,0<mdc≤1。
4)调制与均压
MMC型直流融冰装置的单桥臂子模块数较多,调制方法适合采用广泛应用于MMC的最近电平逼近控制(Nearest Level Control, NLC),其基本原理是根据桥臂电压参考波与电容电压的比值取整,以此确定上、下桥臂投入的子模块数;均压方法采用基于子模块电容电压排序的综合策略。若不考虑环流抑制,每个相单元上、下桥臂投入的子模块数n(p,n)x为
 (9)
(9)
式中,函数round(·)为四舍五入的取整运算;urefx为x相交流参考电压。
在融冰装置以直挂母线方式接入系统的工况下,装置的直流电压具备从0~UdcN的灵活调节能力,相比之下,其额定直流电压UdcN相较于交流侧电压参考值urefx幅值较小。因此,根据式(9)可知,每个相单元上、下桥臂投入的子模块数n(p,n)x在一个工频周期内将呈现正负交替变化的特性,其中正值对应子模块处于正向投入状态,负值则对应子模块处于负向投入状态。在此运行条件下,实际融冰过程中的直流电压Udc可表示为
 (10)
(10)
式中,nx为x相单元实际投入的子模块总数。
分析式(9)和式(10)可知,由于交流侧电压参考值urefx的幅值相较于直流电压Udc较大,且urefx在n(p,n)x的表达式中符号相反,表明尽管n(p,n)x的幅值较大、每个桥臂的模块配置数量较多,但实际投入相单元的子模块总数nx却相对较小。因此,即便nx仅有1个子模块数的波动,也会对直流电压Udc产生明显扰动。
在常规MMC系统中,参与调制的直流电压通常为固定的系统额定直流电压,且该电压值一般为子模块电容额定电压UCN的整数倍。并且由于输电系统电压等级远高于单个子模块电容电压,因此即使存在子模块投入数量的波动,常规输电场景下的直流电压波动问题也并不显著。
然而,MMC型直流融冰装置由于其特有的直流电流控制结构,传统控制方式下参与调制时的直流电压Udc0会受到调制系数mdc的直接影响。该调制系数mdc由直流电流控制经PI调节直接生成,其数值取决于融冰装置自身参数配置、融冰现场的外部环境条件,以及被融冰线路的长度、截面积等因素。换言之,在保证直流电流控制精度的前提下,当融冰线路的阻值R固定,直流电压就必须控制在Udc= IdcrefR附近,相应地,调制系数mdc亦将被钳制在某一特定值。此时,参与调制时的直流电压Udc0= mdcUdcN往往不是电容电压额定值UCN的整数倍,二者之间的数学关系为
 (11)
(11)
式中,Aint为A的整数部分,是一个正整数;Adec为A的小数部分,0<Adec<1。
调制过程中Adec的引入使得单个相单元上、下桥臂所投入的子模块数量之和nx不能维持恒定,稳态运行状态下nx会出现1个子模块数的波动。由于融冰装置的融冰电压Udc相对较小,nx本身数值不大,故即便仅为1个子模块的数量变化,亦会对直流电压Udc产生较大影响,从而导致直流电压质量下降。以下将对nx波动的成因进行具体分析。
当Aint为偶数,即Aint=2a,a∈N*时,根据式(9),此时上、下桥臂投入的子模块数为
 (12)
(12)
同理,当Aint为奇数,即Aint=2a+1,a∈N*时,上、下桥臂投入的子模块数为
 (13)
(13)
在式(12)和式(13)中,连续变化量B= (U/UCN)cos(ωt+θx)也可拆分成整数部分Bint和小数部分Bdec。由于在取整函数round(⋅)的定义中,当B落在区间[Bint−0.5, Bint+0.5)内时,round(B)=Bint,故设定Bdec的范围为-0.5≤Bdec<0.5,于是有
 (14)
(14)
则式(12)可改写为
 (15)
(15)
式(13)可改写为
 (16)
(16)
为了避免直流电压因子模块数的变化而产生波动,理想情况下,每个相单元中上、下桥臂实际投入的子模块数量之和nx0应保持恒定,其表达式为
 (17)
(17)
由式(17)可知,在理想条件下为避免直流电压波动,直流电流参考值Idcref一经设定,相单元上、下桥臂投入子模块数之和nx0应保持恒定。然而,MMC交流侧电压参考值是交流正弦信号,Bdec会重复经历从-0.5~0.5的变化过程,这一过程会影响式(15)和式(16)中上、下桥臂投入的子模块数n(p,n)x,造成实际中上、下桥臂投入的子模块数之和nx发生波动。
当Aint为偶数和奇数情况下,实际投入子模块数之和nx随Bdec的变化情况分别见表1和表2。可以看到,当调制时的直流电压Udc0不是UCN的整数倍时,相单元实际投入子模块总数nx会在Aint和Aint+1之间波动,从而导致直流电压出现以子模块电容电压UCN为幅值的波动。
表1 Aint为偶数时的变化情况(Aint=2a)
Tab.1 Variation of Aint as an even number (Aint=2a)
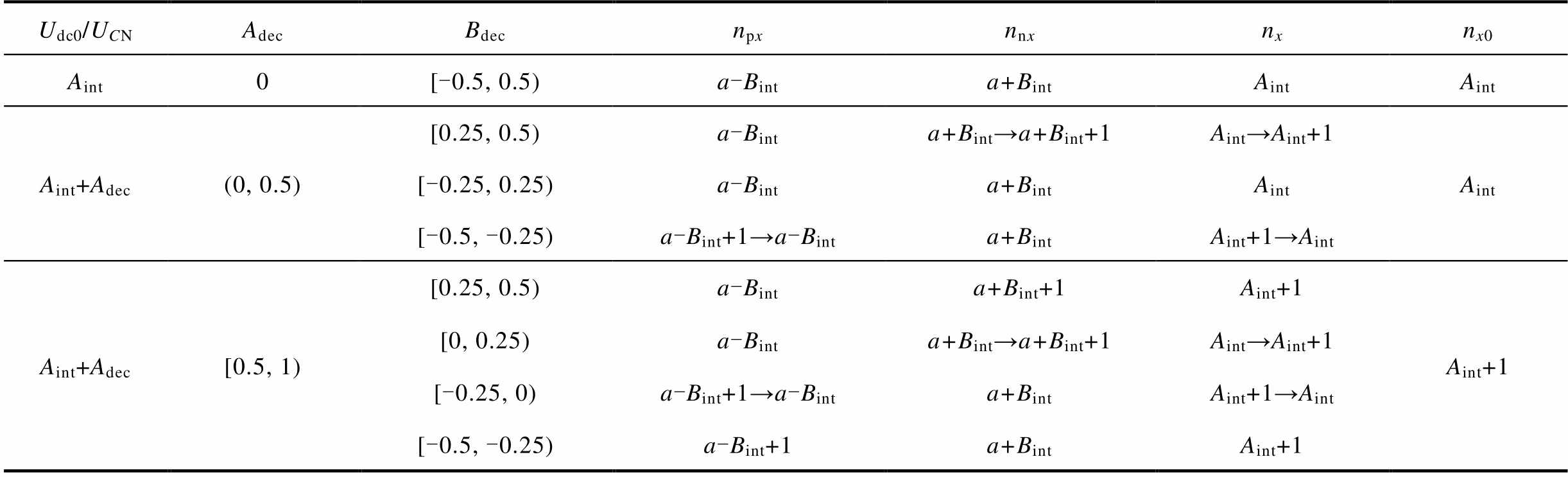
Udc0/UCNAdecBdecnpxnnxnxnx0 Aint0[-0.5, 0.5)a-Binta+BintAintAint Aint+Adec(0, 0.5)[0.25, 0.5)a-Binta+Bint→a+Bint+1Aint→Aint+1Aint [-0.25, 0.25)a-Binta+BintAint [-0.5, -0.25)a-Bint+1→a-Binta+BintAint+1→Aint Aint+Adec[0.5, 1)[0.25, 0.5)a-Binta+Bint+1Aint+1Aint+1 [0, 0.25)a-Binta+Bint→a+Bint+1Aint→Aint+1 [-0.25, 0)a-Bint+1→a-Binta+BintAint+1→Aint [-0.5, -0.25)a-Bint+1a+BintAint+1
表2 Aint为奇数时的变化情况(Aint=2a+1)
Tab.2 Variation of Aint as an odd number (Aint=2a+1)
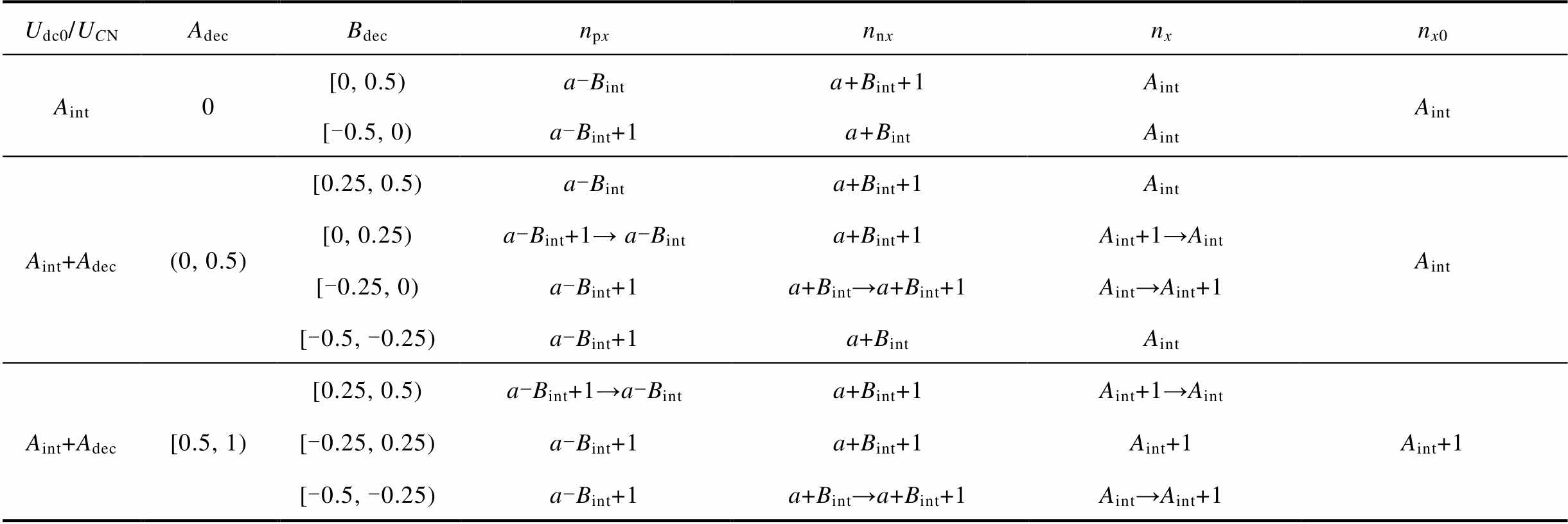
Udc0/UCNAdecBdecnpxnnxnxnx0 Aint0[0, 0.5)a-Binta+Bint+1AintAint [-0.5, 0)a-Bint+1a+BintAint Aint+Adec(0, 0.5)[0.25, 0.5)a-Binta+Bint+1AintAint [0, 0.25)a-Bint+1→ a-Binta+Bint+1Aint+1→Aint [-0.25, 0)a-Bint+1a+Bint→a+Bint+1Aint→Aint+1 [-0.5, -0.25)a-Bint+1a+BintAint Aint+Adec[0.5, 1)[0.25, 0.5)a-Bint+1→a-Binta+Bint+1Aint+1→AintAint+1 [-0.25, 0.25)a-Bint+1a+Bint+1Aint+1 [-0.5, -0.25)a-Bint+1a+Bint→a+Bint+1Aint→Aint+1
在Aint分别为偶数和奇数两种情况下,当Adec=0.25和Adec=0.75时,实际投入子模块总数nx随Bdec的变化情况如图3所示。可以看到,当Aint为偶数时,nx在2a~2a+1之间波动;当Aint为奇数时,nx在2a+1~2a+2之间波动,符合表1和表2的分析结果,验证了相单元实际投入子模块总数nx会在Aint~Aint+1之间波动的结论。
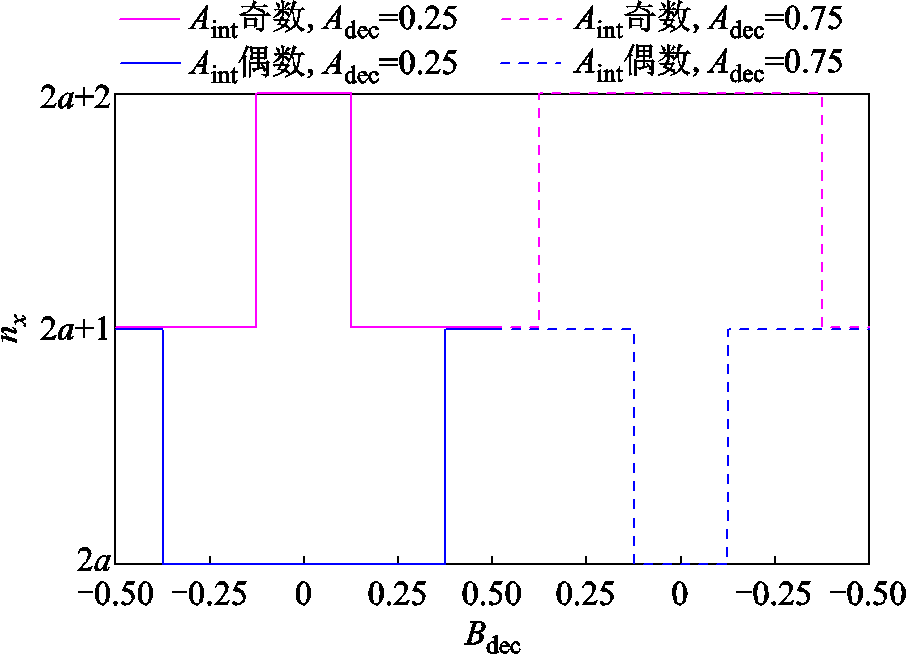
图3 nx随Bdec的变化情况
Fig.3 Variation of nx with Bdec
由此可见,直流侧电压波动的产生并非源于控制回路精度不足,而是由于直流电流控制对调制直流电压Udc0的钳制作用。本质原因在于调制系数mdc与子模块离散配置特性之间的不匹配,导致相单元子模块投入总数nx波动,进而引发直流电压波动。附图1展示了某变电站MMC型直流融冰装置在稳态融冰阶段的电压现场录波结果,可观察到直流电压波形波动显著,其峰值约为800 V,电压波动幅度接近200 V,验证了本节的结论。
由第2节分析可以看出,只要调制过程中的直流电压不是电容电压额定值UCN的整数倍,运行过程中实际相单元上、下桥臂投入子模块总数nx就会产生波动,进而造成融冰系统直流电压的波动;相反,若调制时的直流电压为UCN的整数倍,则可有效地避免nx的波动,从而抑制直流电压波动。因此,将调制时的直流电压参考值调整为UCN的整数倍,是改进直流电流控制环的关键目标。
如第2节所述,若将直流电流参考值与实际值的偏差经PI控制器处理后输出的调制量直接用于计算调制直流电压Udc0,则难以保证其恰为子模块电容额定电压UCN的整数倍。为了确保调制环节中所生成的直流电压满足整数倍关系,需对由直流电流控制环节输出的原始调制直流电压Udc0进行取整处理。取整后的调制直流电压Udc1可表示为
 (18)
(18)
由式(18)可以看出,取整后的调制直流电压Udc1仍受控于直流调制系数mdc。同时,式(18)的非线性运算会导致实际输出电压Udc1与理想值Udc0间产生固有偏差。在闭环直流电流控制下,该电压偏差将等效为直流电流环在Idc上的扰动输入,该扰动经过PI控制环节后将反映为调制系数mdc的波动,最终造成Udc1仍然会在AintUCN~(Aint+1)UCN间反复波动,其扰动传递路径如图4所示。
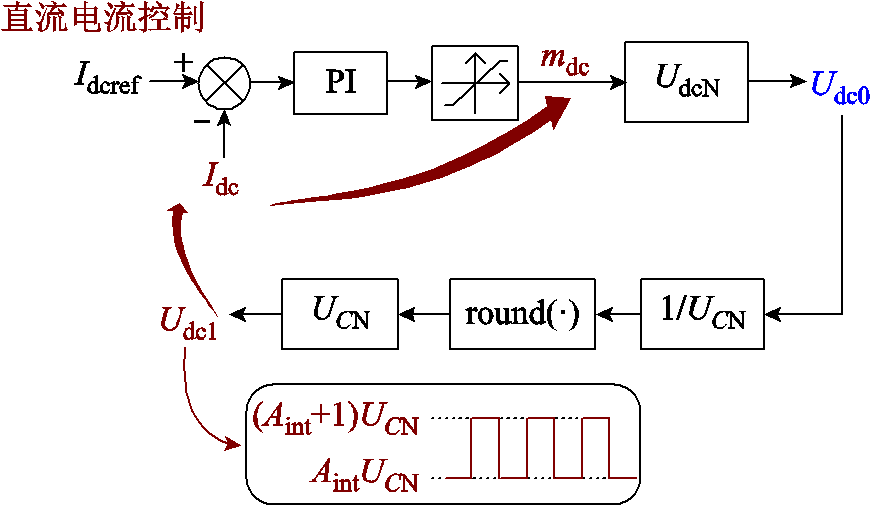
图4 调制直流电压取整带来的影响
Fig.4 Impact of modulation DC voltage rounding
因此,若仅保留常规的直流电流控制方法,并通过对调制过程中的直流电压进行简单取整来处理子模块数的配置问题,难以从根本上消除直流电压的波动。其根本原因在于取整运算所引入的偏差扰动问题并没有解决,导致调制系数mdc出现波动,进而引发电压扰动。因此,如何有效地抑制由取整误差引起的电流扰动,保持mdc的稳定,是实现直流电压稳定控制的关键。
3.2.1 电压取整下电流扰动问题及消除方法
若能设定一个合理的固定直流电流参考值Idcref,使调制电压mdcUdcN恰好为子模块额定电压UCN的整数倍,理论上可避免由于取整引起的误差,从而抑制直流电压的波动。然而,在实际运行过程中,受负载变化等因素影响,难以通过预先计算来精确设定满足上述条件的固定电流参考值。可见在固定Idcref的情况下,取整后的调制直流电压Udc1不可避免地会受到取整运算误差的影响,导致相单元投入子模块总数nx反复波动,仍会造成直流侧电压质量下降。
鉴于传统固定参考电流控制在直流电压波动方面存在的局限性,本文提出一种基于直流电流参考值动态调整的改进控制方法。该方法通过根据融冰电流Idc的变化适时调整Idcref,以抵消因取整操作带来的误差扰动,实现对子模块数波动的抑制,从而提升直流电压质量。改进直流电流控制方法及直流参考值调整策略如图5所示。
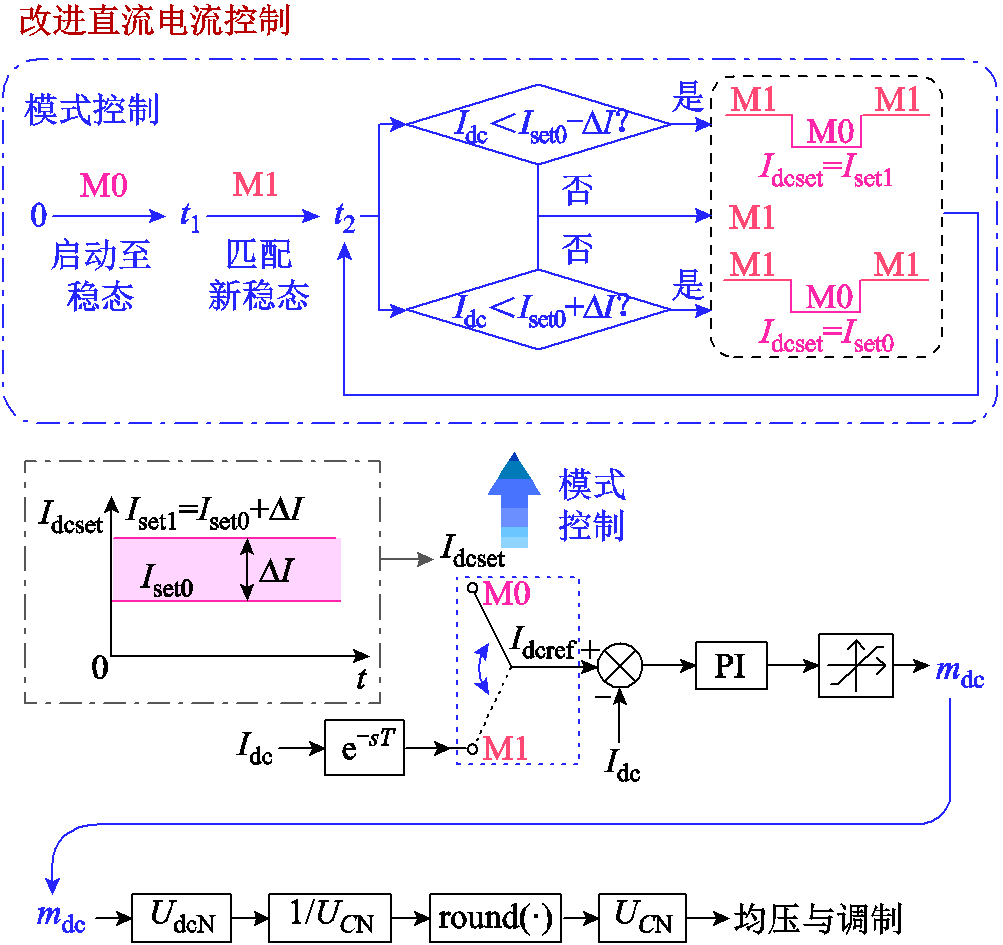
图5 改进直流电流控制方法及直流参考值调整策略
Fig.5 Enhanced DC current control method and DC reference adjustment strategy
改进的直流电流控制方法在Idcref的选择上包括Mode0和Mode1两种模式(分别用M0和M1表示):M0模式下将Idcref直接设定为固定的电流参考值Idcset(与传统直流电流控制方法一致),适用于系统的启动和融冰电流大小的调整;而M1模式下则将Idcref设定为T时刻前的直流电流Idc实时值,适用于系统启动后的电流调整以及稳态运行,此时直流环输出的调制系数mdc表达式为
 (19)
(19)
式中,T为延迟时间。
由第2节分析可知,直接对Udc0进行取整运算会给直流电流Idc带来扰动,进而引起mdc的波动。而式(19)的控制目标实质上是令取整运算带来的电流扰动趋于0,当式(19)到达稳态时,T时刻之前的直流电流与当前直流电流的大小相同,即Idce-sT=Idc,说明此时取整运算带来的电流扰动消失,不会再引起mdc的变化。考虑到该过程中同时引入了电压取整环节,式(19)的平衡态表明此时电压的取整也不会再导致电流扰动。换言之,此时电压取整和电流恒定的条件同时满足,相单元实际投入子模块总数nx固定不变,直流电压的波动得到了有效消除。
3.2.2 直流电流稳态偏差问题及消除方法
如图5所示,系统在0~t1时间段内工作于原始控制模式M0,此阶段直流电流Idc由控制系统调节至初始设定值Iset0附近。然而,由于无法使得mdcUdcN的结果为UCN的整数倍,导致此时直流电压仍存在显著波动。在t1时刻,系统切换至改进控制模式M1。为抑制上述波动,参考电流Idcref将根据实际直流电流Idc的变化自适应调整,逐步逼近一个最接近Iset0且能够有效消除扰动的稳态参考值Idcrefi(i=1,2,…)。在PI控制器的作用下,系统最终将Idc调节至与Idcrefi相等的稳定状态。与此同时,由于该过程中引入了直流电压取整环节,系统在该稳态下的直流电压值为UCN的整数倍,从而确保nx维持为正整数定值,有效地避免了直流电压波动现象的产生。
但是,在不同初始设定值Iset0下,系统t2时刻匹配到的稳态电流参考值Idcrefi会有所不同,此时Idcrefi以及相邻参考值Idcref(i+1)间的步长∆Idcref为
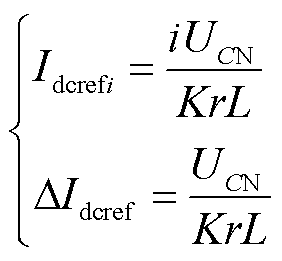 (20)
(20)
式中,r为线路单位长度电阻;L为融冰线路的长度;K为阻值系数,与系统接线方式有关,1-1融冰方式下K=2,1-2融冰方式下K=1.5。
式(20)说明,在控制模式M1下为保证直流侧电压质量,系统的最终稳态电流Idc会与初始设定值Iset0之间存在一定的偏差。结合式(19)分析,在稳态前的自适应匹配阶段,为确保直流电压Udc>0,必须满足调制系数mdc>0。即需满足不等式Idce-sT>Idc,当前电流值要小于T时刻之前的电流值。该约束表明,在自适应调节过程中,融冰电流Idc呈逐步减小趋势,直至趋近于某一满足条件的稳态电流参考值Idcrefi。因此,最终系统稳定的直流电流满足Idc≈Idcrefi<Iset0。
然而,工程规定直流融冰电流的实际值与给定参考值的偏差不应超过±5%[24]。但仅切换一次参考值模式时,当Iset0十分逼近两个相邻Idcrefi中较大的一方时,在反向趋近的效应下系统最终稳态电流Idc将趋于两个相邻Idcrefi中较小的一方。此时,Idc与Iset0的偏差将接近一个参考值步长∆Idcref,在某些场景下可能导致超出±5%的允许范围,产生稳态偏差过大的问题。
此时,若适当调整原有的电流设定值Iset0,使调整后的设定值为Iset1=Iset0+∆I,其中偏差门槛∆I= 0.5∆Idcref,就可以使上述情况下稳态电流Idc收敛于Idcrefi中较大的一方,使得最终融冰电流Idc与初始电流设定值Iset0相差至多0.5∆Idcref,缩小两者间的稳态偏差。同时,仅切换一次参考值的方式还会存在扰动不收敛值不合理以及超调量较大时系统收敛至较高的Idcrefi的问题。因此,综合上述两方面考虑,改进的直流电流控制环还需要额外的控制环节来监测并控制融冰电流大小。
基于上述分析,本文提出的直流电流控制环改进控制策略如图6所示,具体控制步骤为:
(1)0~t1时段:该阶段参考值控制模式保持在M0,Idcref保持为Iset0,在t1时刻,融冰系统直流电流Idc通过控制系统调节,稳定在设定值Iset0附近。
(2)t1~t2时段:在t1时刻之后,参考值控制模式切换至M1,随后Idcref根据Idc实现自适应调整,至t2时刻系统到达稳态,此时取整后的调制直流电压Udc1为UCN的整数倍,相单元实际投入子模块总数nx固定不变,直流电压波动大幅度降低。需要指出的是,t1和t2的选取应结合融冰系统特性及控制器的动态响应能力,并依据工程经验设定,以保证其适用于多数应用场景下的控制要求。
(3)t2时刻之后:系统进入稳态运行阶段,开启状态监测功能,对Idc进行实时监测。当Idc与Iset0间的偏差小于±∆I时,保持M1稳态运行;偏差大于±∆I时,通过直流参考值调整环节的切换配合来对融冰系统的电流进行重新控制。
(4)模式切换调整机制:当检测到Idc<Iset0-∆I时,控制模式切换回M0,电流参考值Idcref设为Iset1= Iset0+∆I,经过响应间隔时间∆T之后,重新切换为M1,并匹配电流稳态值;当检测到Idc>Iset0+∆I时,控制模式切换回M0,电流参考值Idcref设为Iset0,经过∆T的响应时间后,重新切换为M1,随后重新匹配电流稳态值。其中,响应间隔时间∆T的确定需综合考虑控制回路的响应速度,确保其大于模式切换后直流电流的调整时间,从而保障控制策略的动态响应性能。
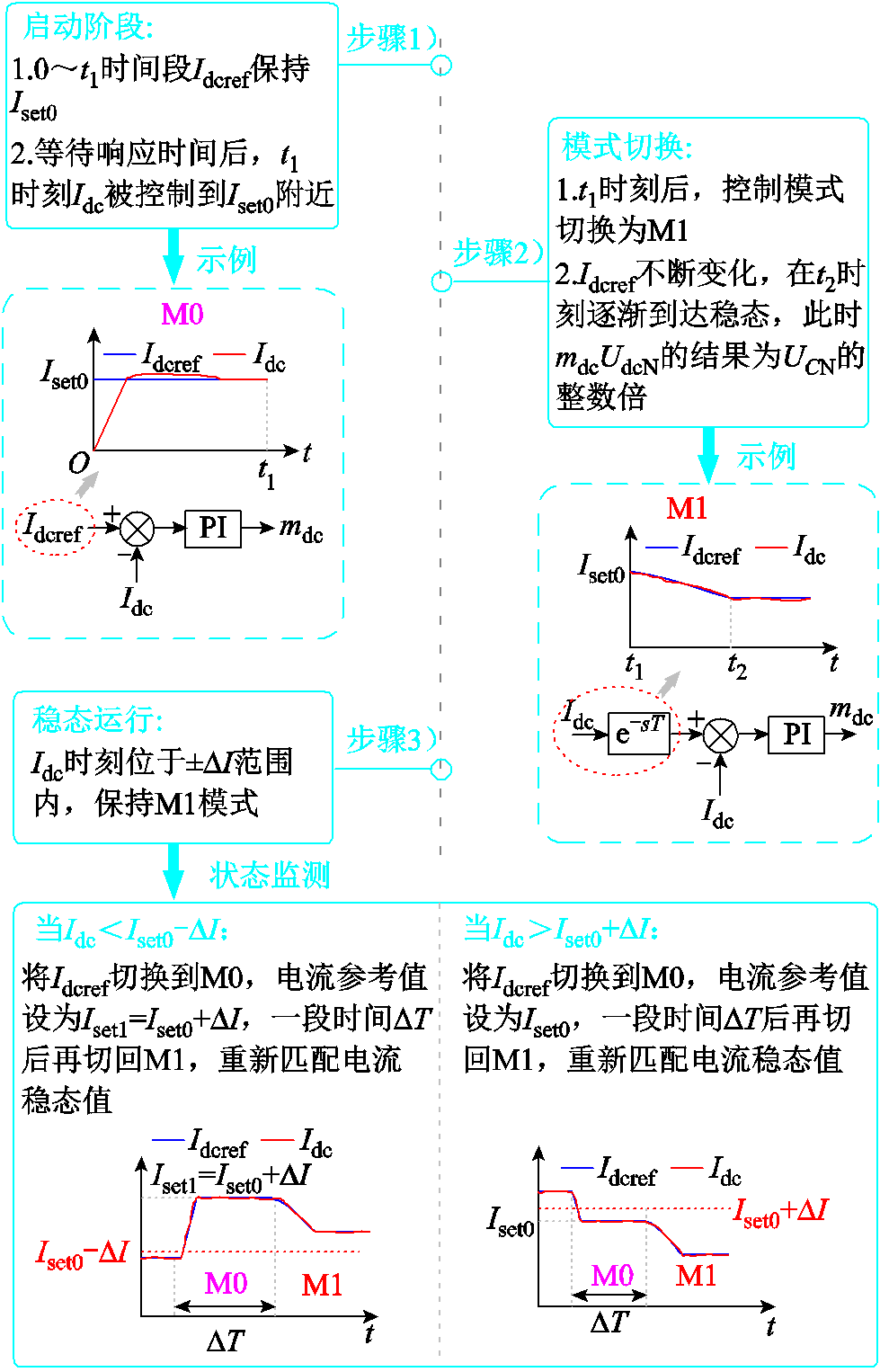
图6 直流电流控制环改进控制策略
Fig.6 Enhanced control strategy for DC current control loop
为验证本文所提控制策略的有效性,在PSCAD/ EMTDC中搭建了如图7所示的仿真模型,模拟融冰装置接入500 kV变电站的35 kV母线侧,对站内覆冰线路开展直流融冰作业。其中融冰线路采用依频模型,融冰装置的仿真参数参考贵州电网某500 kV变电站工程中已投运的全桥型MMC直流融冰装置配置[25],系统具体参数见附表1,传统控制方法下各控制环运行情况详见附录。
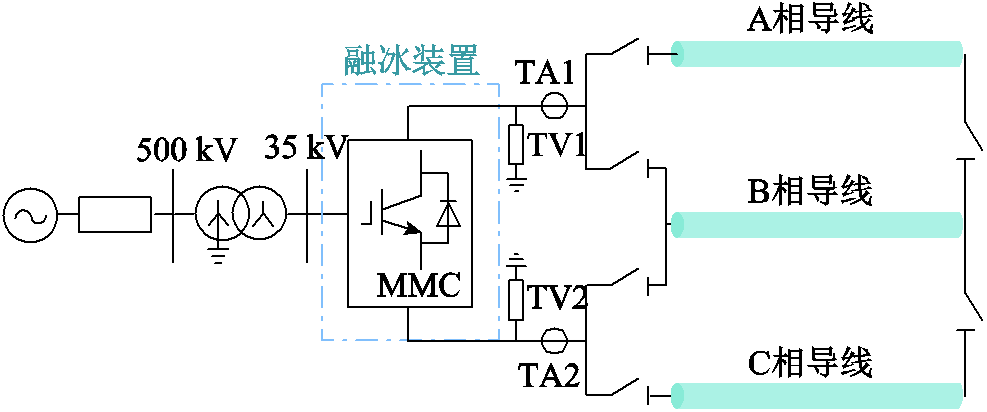
图7 仿真系统拓扑
Fig.7 Topology of the simulation system
本文所提出的改进型直流电流控制策略在仿真中共涉及5个控制参数:控制模式切换时刻t1、t2,响应间隔时间∆T,延迟时间T以及偏差门槛∆I。结合融冰系统特性及控制器的动态响应能力,本文设定参数值为:t1=2.5 s,t2=5 s,∆T=2 s,并根据系统参数计算得到∆I≈0.03(pu)。
在延迟时间T的选取方面,以“1-1融冰方式”下Iset0=0.76(pu)为例,系统于t1时刻切换至M1,分别测试延迟时间T=5、10、20 ms下直流电压的稳定效果,仿真结果如图8a所示。结果表明,延迟时间T越短,直流电压的改善效果越显著。因此,本文选取T=5 ms作为延迟时间。在后续所有仿真算例中均采用“1-1融冰方式”,并基于上述统一设定的控制参数进行验证。
图8b展示了在融冰电流设定值Iset0=0.74(pu)条件下,改进方法实施前后直流电压的仿真结果对比。结果表明,引入改进方法后,直流电压的波动幅值由约1.5 kV降低至约0.6 kV,电压质量得到有效提升。进一步分析图8c所示的a相相单元实际投入子模块总数na可见,改进前na在13与14之间频繁波动,导致电流与电压产生明显扰动;而在采用改进方法后,na保持恒定于13,有效地抑制了子模块数量波动带来的直流电压扰动,从而显著改善了系统的电压质量。
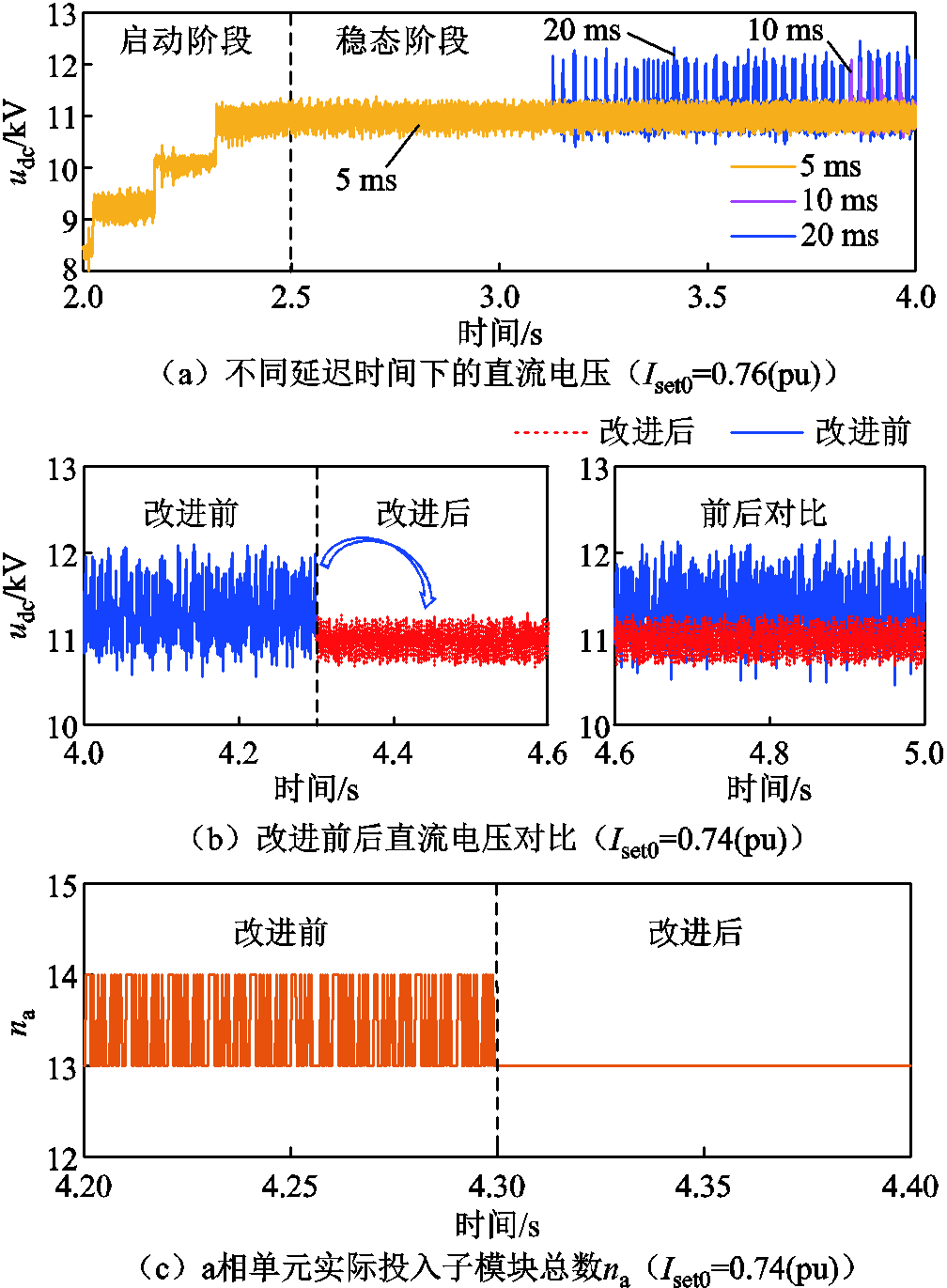
图8 不同延迟时间下以及直流电流控制环改进前后的仿真结果对比
Fig.8 Comparison of waveforms under different delay times and comparison of waveforms before and after improvement
本算例首先测试不考虑直流电流稳态偏差消除(即无状态监测功能)、不同Iset0下最终得到的稳态直流电流Idc,结果见表3。由测试结果可以看出,在不引入状态监测功能(3.3节中步骤3)和步骤4))条件下,当初始设定值较小时,最终的直流电流Idc与初始参考值Iset0之间的偏差可能会超过-5%的下限;而当初始设定值较大时,受超调量的影响,最终直流电流Idc则又有可能会超过+5%的稳态偏差。
表3 无直流电流监测功能时的直流电流控制结果
Tab.3 Steady-state current results without DC mode control
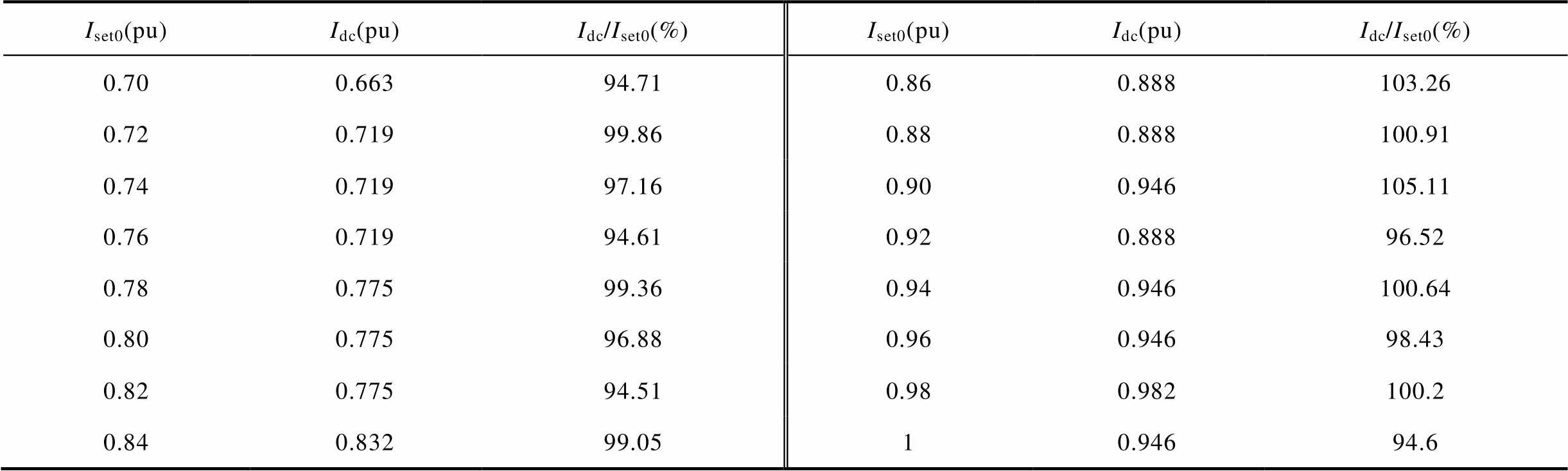
Iset0(pu)Idc(pu)Idc/Iset0(%)Iset0(pu)Idc(pu)Idc/Iset0(%) 0.700.66394.710.860.888103.26 0.720.71999.860.880.888100.91 0.740.71997.160.900.946105.11 0.760.71994.610.920.88896.52 0.780.77599.360.940.946100.64 0.800.77596.880.960.94698.43 0.820.77594.510.980.982100.2 0.840.83299.0510.94694.6
进一步地,测试在引入完整状态监测功能的直流电流控制改进策略下,直流电流控制的改善效果。当系统切换至M1并达到稳态后,实时监测融冰电流的幅值,一旦检测到融冰电流偏离当前参考值超过设定的偏差门槛±∆I,系统将立即触发响应机制,切换控制模式以二次匹配新的电流参考值。
以Iset0=0.82(pu)为例,相应的仿真结果如图9所示。系统达到稳态阶段时,在t2时刻检测到实际直流电流Idc=0.775(pu)<Iset0-∆I=0.82-0.03= 0.79(pu)。因此,直流电流控制模式重新切回M0,并将融冰电流的参考值调整为0.85(pu)(Iset1=Iset0+∆I=0.82+ 0.03=0.85(pu)),在经过响应时间∆T后,系统逐步达到稳态。
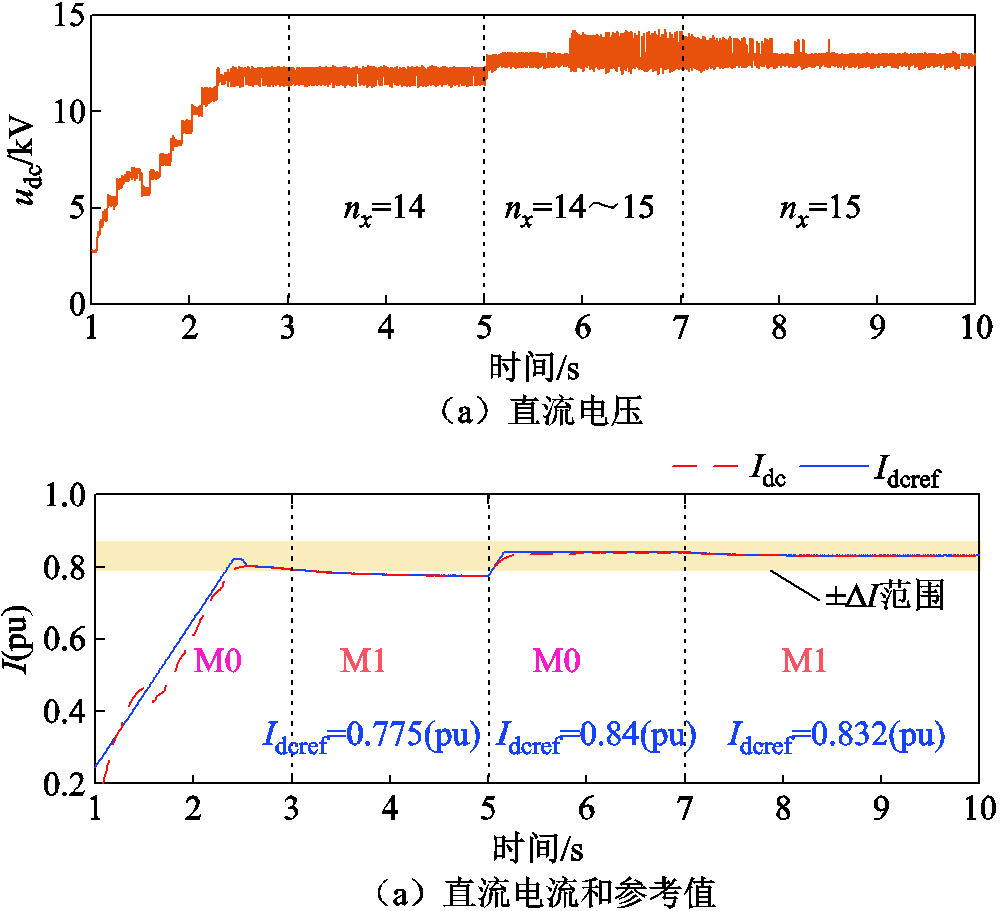
图9 直流电压和直流电流参考值(Iset0=0.82(pu))
Fig.9 DC voltage and DC current reference values (Iset0=0.82(pu))
然而,此时稳态时刻下的mdcUdcN并非UCN的整数倍,导致相单元投入模块总数nx在14~15之间波动。为此,控制模式再次切换为M1,进行电流的二次匹配。最终在稳态条件下,模块投入总数nx=15,直流电流Idc=0.832(pu),满足±∆I的误差范围,验证了控制策略的有效性。
重新测试表3中不同Iset0下的最终电流控制结果,得到相应测试结果见表4。由测试结果可知,在引入状态监测功能后,最终得到的稳态直流电流Idc与设定值Iset0的稳态偏差均不会超过±5%,表明改进控制策略下直流电流稳态偏差均在允许范围以内,满足工程上对融冰电流的幅值要求。
表4 引入直流电流监测功能后直流电流控制结果
Tab.4 Steady-state current results with DC mode control
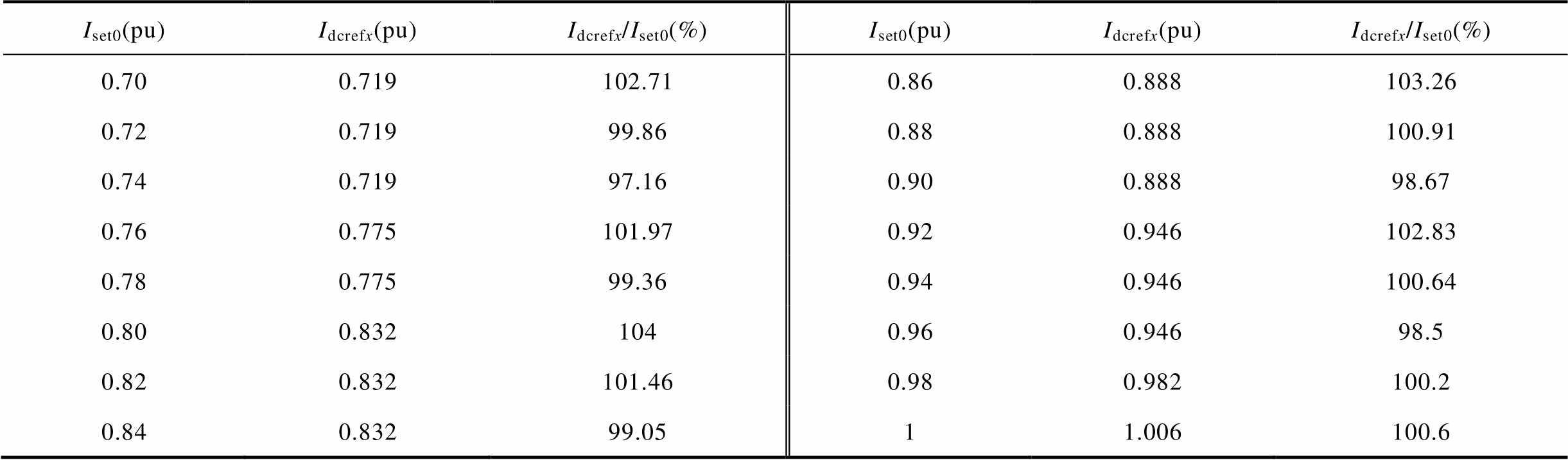
Iset0(pu)Idcrefx(pu)Idcrefx/Iset0(%)Iset0(pu)Idcrefx(pu)Idcrefx/Iset0(%) 0.700.719102.710.860.888103.26 0.720.71999.860.880.888100.91 0.740.71997.160.900.88898.67 0.760.775101.970.920.946102.83 0.780.77599.360.940.946100.64 0.800.8321040.960.94698.5 0.820.832101.460.980.982100.2 0.840.83299.0511.006100.6
图10展示了当Iset0=0.74(pu)时,控制策略优化前后的三相桥臂环流Icir、桥臂子模块电容电压uC、直流电流Idc、直流电压Udc以及系统功率P的仿真结果。如图10a、图10b所示,未采用改进策略时,三相桥臂环流中除主要的二倍频分量外,还叠加有其他频率成分,桥臂电流畸变严重。其环流最大值为-0.709 kA,最小值为-1.064 kA,对应最大偏差Δicir0=-0.709-(-1.064)=0.355 kA。实施改进方法后,环流的最大值为-0.723 kA,最小值为-1.006 kA,对应最大偏差降至Δicir1=-0.723-(-1.006)= 0.283 kA,表明桥臂电流的畸变程度得到了有效抑制。
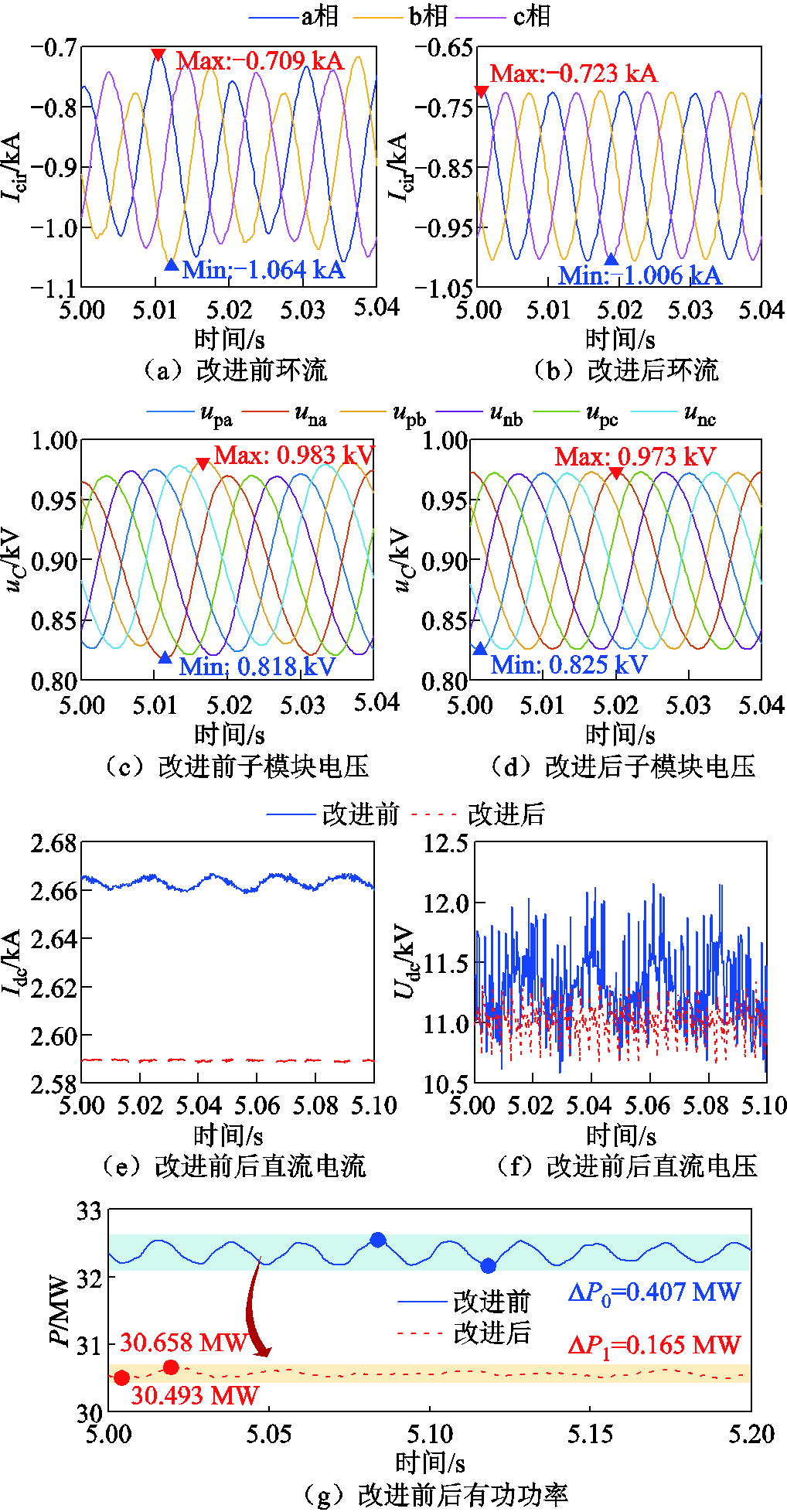
图10 改进前后环流、子模块电压、直流电流、直流电压、有功功率对比(Iset0=0.74(pu))
Fig.10 Comparison of circulating current, submodule voltage, DC current, DC voltage and active power before and after the improvement (Iset0=0.74(pu))
为定量分析控制优化对子模块电容电压均衡性的提升,引入中电容电压不平衡度σC的概念[26],即一段时间内电容电压之间的最大偏差与电容电压额定值之比。图10c、图10d显示,策略优化前的最大电容电压为0.983 kV,最小值为0.818 kV,对应电容电压不平衡度σC0=(0.983-0.818)/0.9=0.18;而在策略优化后,电容电压范围为0.825~0.973 kV,计算得到不平衡度σC1=(0.973-0.825)/0.9=0.16。可见,所提出的改进方法有效地缓解了子模块电压偏差,提升了电压均衡水平。
进一步从图10e、图10f可观察到,尽管改进前的融冰电流中存在幅值较小的低频谐波,但其对融冰热效应的影响有限。而相比之下,直流侧电压波动量更大、谐波成分更复杂,是导致系统有功功率波动的主要原因。功率波动的对比结果如图10g所示,未采用改进方法时的功率波动幅度为ΔP0= 0.407 MW,当采用改进方法后功率波动降至ΔP1= 0.165 MW。可见,控制策略优化后抑制了有功功率的波动,使功率传输过程更加平稳,有利于提升系统的稳定性。
综上表明,所提控制策略可有效地抑制桥臂环流畸变,提升子模块电压均衡性并降低系统功率波动,在提升系统电能质量、运行稳定性等方面展现出良好的工程参考价值,验证了所提控制策略正确性与有效性。
本文深入分析了MMC型直流融冰系统中直流电压波动的产生机理,并在此基础上,结合现有融冰装置的直流电流控制结构,提出了一种兼顾直流电压波动抑制与直流电流稳态偏差补偿的控制环改进方法。该方法从优化控制策略层面有效地消除了直流电压波动的根源,具备实现简便、无需额外硬件投入等优势,具体结论如下:
1)在现有的直流环控制方式下,调制时的直流电压Udc0难以保证是子模块电容额定电压UCN的整数倍,使得MMC各相单元实际投入的子模块总数nx频繁变化,存在1个子模块数量的幅值波动,从而导致直流电压产生波动。
2)本文提出了基于调制直流电压取整和电流控制模式自适应切换的直流电流控制环改进方法。该方法通过引入调制电压取整环节,确保参与调制的取整调制直流电压Udc1为子模块电容额定电压UCN的整数倍,并通过自适应调整直流电流控制参考值消除取整环节导致的扰动问题。同时,为进一步减小由此带来的融冰电流稳态偏差,引入电流状态监测环节,在融冰电流越限时通过切换控制模式对其进行合理调控,有效地降低实际融冰电流与目标值之间的稳态偏差。仿真结果表明,所提方法可有效地抑制直流电压波动,改善MMC相间环流和子模块电容电压波动问题。
附 录
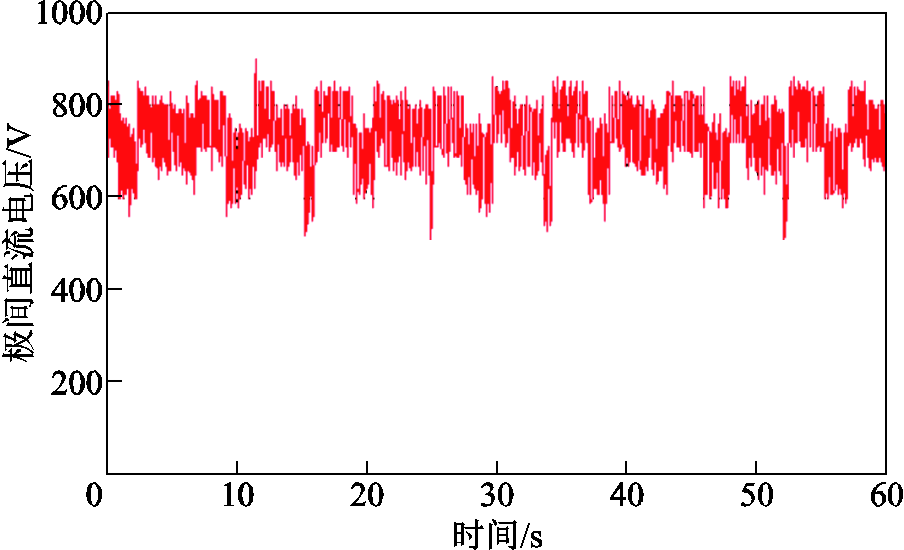
附图1 某变电站MMC型融冰装置稳态阶段现场电压录波
App.Fig.1 Steady-state voltage profile recording for MMC deicing device in field operation
附表1 融冰系统参数
App.Tab.1 De-icing device parameters
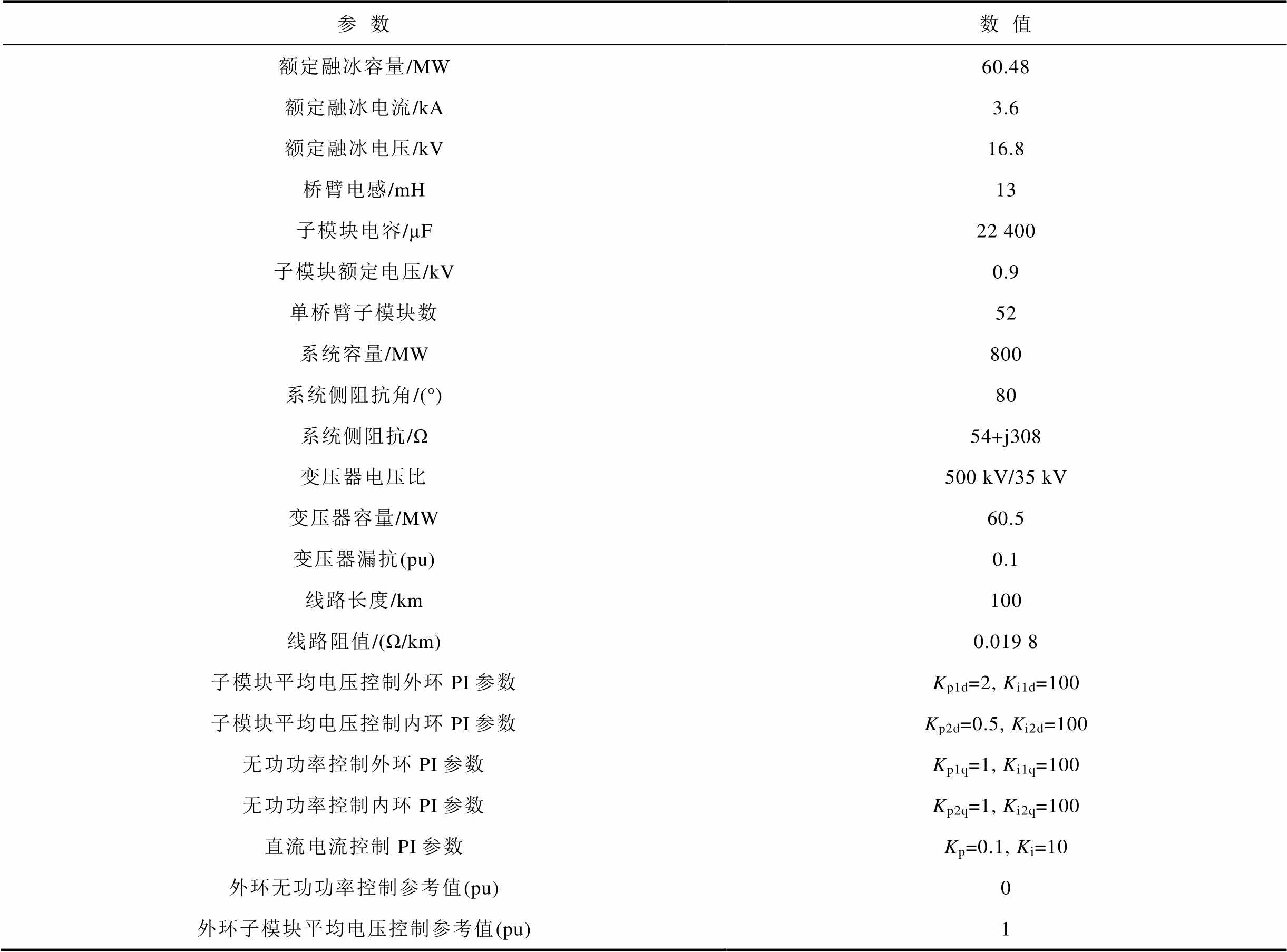
参数数值 额定融冰容量/MW60.48 额定融冰电流/kA3.6 额定融冰电压/kV16.8 桥臂电感/mH13 子模块电容/μF22 400 子模块额定电压/kV0.9 单桥臂子模块数52 系统容量/MW800 系统侧阻抗角/(°)80 系统侧阻抗/Ω54+j308 变压器电压比500 kV/35 kV 变压器容量/MW60.5 变压器漏抗(pu)0.1 线路长度/km100 线路阻值/(Ω/km)0.019 8 子模块平均电压控制外环PI参数Kp1d=2, Ki1d=100 子模块平均电压控制内环PI参数Kp2d=0.5, Ki2d=100 无功功率控制外环PI参数Kp1q=1, Ki1q=100 无功功率控制内环PI参数Kp2q=1, Ki2q=100 直流电流控制PI参数Kp=0.1, Ki=10 外环无功功率控制参考值(pu)0 外环子模块平均电压控制参考值(pu)1
以下以电流设定值Iset0=0.74(pu)为例,说明在引入改进控制策略前,各控制环的动态响应过程及配合时序,如附图2所示。MMC型直流融冰装置在0.2 s完成子模块预充电,在0.4 s信号解锁后投入运行,交流侧与直流侧控制环同时激活,各控制环开始响应。直流电流参考值在控制环作用下逐步上升,并于2.4 s左右达到稳态水平,系统进入稳态运行阶段。
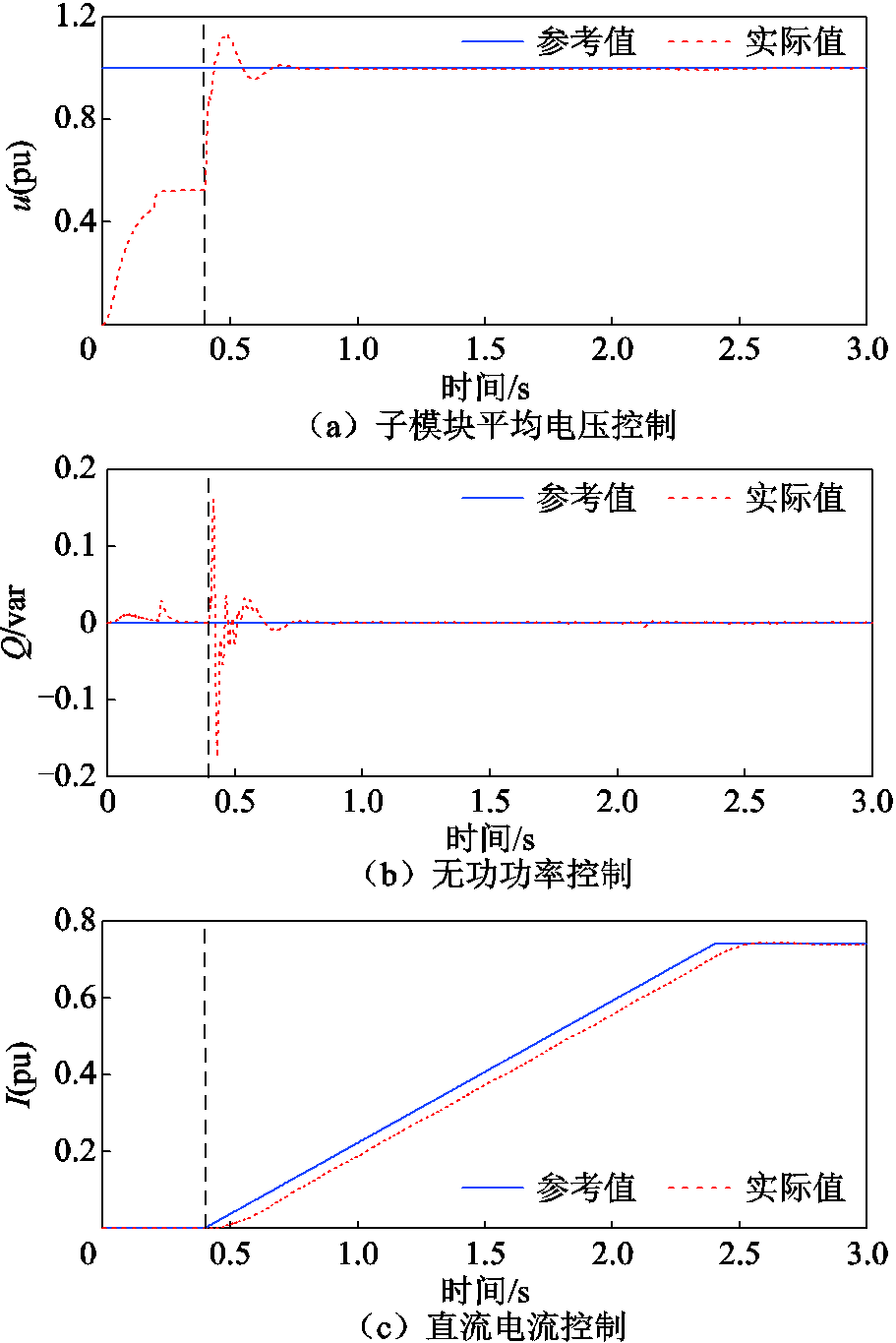
附图2 各控制环影响效果(Iset0=0.74(pu))
App.Fig.2 Impact of control loops (Iset0 = 0.74(pu))
为观察子模块调制行为,以a相单元为例,其稳态运行下上、下桥臂的投入子模块数量n(p,n)a如附图3所示。图中,当n(p,n)a为正值时表示对应桥臂正向投入子模块;为负值时表示负向投入。
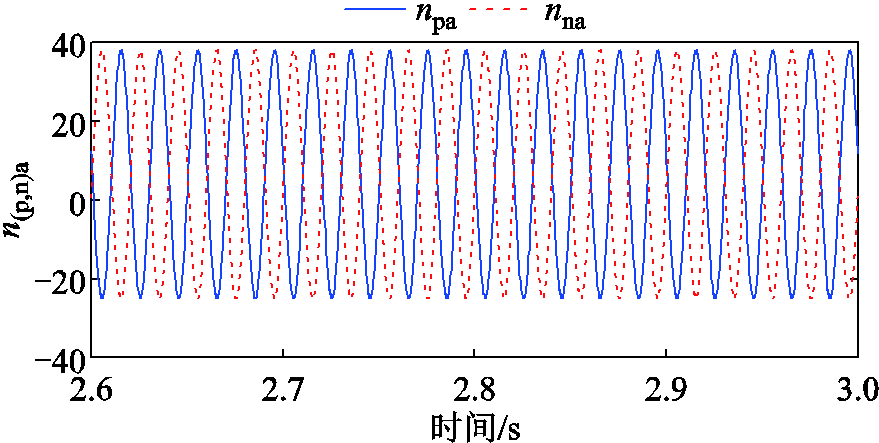
附图3 稳态a相上下桥臂投入子模块数(Iset0=0.74(pu))
App.Fig.3 Steady-state inserted SM count in phase a arms (Iset0=0.74(pu))
参考文献
[1] 黄亚飞, 陈阳宁, 杨鑫, 等. 基于遮蔽效应分析的分裂导线覆冰特性及快速计算方法[J]. 电工技术学报, 2025, 40(9): 2852-2863. Huang Yafei, Chen Yangning, Yang Xin, et al. Icing characteristics and rapid calculating method of bundled conductor of transmission line based on shadowing effect analysis[J]. Transactions of China Electrotechnical Society, 2025, 40(9): 2852-2863.
[2] 杨国林, 蒋兴良, 廖乙, 等. 输电线路单导线自由扭转覆冰动态仿真研究[J]. 电工技术学报, 2024, 39(13): 4079-4089. Yang Guolin, Jiang Xingliang, Liao Yi, et al. Simulation study of the free torsional icing on single conductors of transmission lines[J]. Transactions of China Electrotechnical Society, 2024, 39(13): 4079- 4089.
[3] 胡琴, 王欢, 舒立春, 等. 覆冰条件下风力发电机叶片防/除冰方法综述[J]. 电工技术学报, 2024, 39(17): 5482-5496. Hu Qin, Wang Huan, Shu Lichun, et al. Review of anti-/de-icing methods for wind turbine blades under icing conditions[J]. Transactions of China Electro- technical Society, 2024, 39(17): 5482-5496.
[4] Wang Juanjuan, Fu Chuang, Chen Yiping, et al. Research and application of DC de-icing technology in China southern power grid[J]. IEEE Transactions on Power Delivery, 2012, 27(3): 1234-1242.
[5] 许逵, 马晓红, 邴钰淇, 等. 电压源和电流源混合型融冰技术及其控制策略[J]. 高电压技术, 2020, 46(8): 2789-2798. Xu Kui, Ma Xiaohong, Bing Yuqi, et al. VSC and CSC hybrid de-icing technology and its control strategy[J]. High Voltage Engineering, 2020, 46(8): 2789-2798.
[6] Li Binbin, Shi Shaolei, Xu Dianguo, et al. Control and analysis of the modular multilevel DC de-icer with STATCOM functionality[J]. IEEE Transactions on Industrial Electronics, 2016, 63(9): 5465-5476.
[7] 郭裕群, 周月宾, 许建中, 等. 适用于全桥型模块化多电平换流器的直流融冰装置控制策略[J]. 电力系统自动化, 2017, 41(5): 106-113. Guo Yuqun, Zhou Yuebin, Xu Jianzhong, et al. Control strategies of DC ice-melting equipments for full-bridge modular multilevel converters[J]. Automation of Electric Power Systems, 2017, 41(5): 106-113.
[8] 班国邦, 牛唯, 杨旗, 等. 模块化多电平直流融冰装置谐振机理及抑制措施研究[J]. 电力系统保护与控制, 2022, 50(3): 180-187. Ban Guobang, Niu Wei, Yang Qi, et al. The resonance mechanism and suppression measures of DC ice-melting equipment based on a modular multilevel converter[J]. Power System Protection and Control, 2022, 50(3): 180-187.
[9] 李政林. 基于全桥MMC拓扑结构的直流融冰装置工程应用研究[J]. 电力勘测设计, 2024(8): 79-83. Li Zhenglin. Research on engineering application of DC ice-melting device with full bridge MMC topology structure[J]. Electric Power Survey & Design, 2024(8): 79-83.
[10] Lin Weixing, Jovcic D, Nguefeu S, et al. Full-bridge MMC converter optimal design to HVDC operational requirements[J]. IEEE Transactions on Power Delivery, 2016, 31(3): 1342-1350.
[11] Hu Pengfei, Liang Yiqiao, Du Yi, et al. Development and testing of a 10 kV 1.5 kA mobile DC de-icer based on modular multilevel converter with STATCOM function[J]. Journal of Electronics, 2018, 18(2): 456-466.
[12] 杨国林, 蒋兴良, 王茂政, 等. 输电线路单导线覆冰形状对直流大电流融冰时间的影响[J]. 电工技术学报, 2024, 39(9): 2916-2924. Yang Guolin, Jiang Xingliang, Wang Maozheng, et al. The impact of ice accumulation shape on the DC high current ice-melting time for a single conductor on power transmission line[J]. Transactions of China Electrotechnical Society, 2024, 39(9): 2916-2924.
[13] 许逵, 马晓红, 饶崇林, 等. 全桥MMC型和晶闸管整流型直流融冰技术的研究与比较[J]. 南方电网技术, 2020, 14(4): 45-53. Xu Kui, Ma Xiaohong, Rao Chonglin, et al. Research and comparison of DC deicing technologies based on full bridge MMC and thyristor rectifier[J]. Southern Power System Technology, 2020, 14(4): 45-53.
[14] 张夏辉, 韩民晓, 杨景刚, 等. 直流侧电压波动对MMC的环流影响机理分析及抑制方法[J]. 电力系统自动化, 2021, 45(15): 122-131. Zhang Xiahui, Han Minxiao, Yang Jinggang, et al. Analysis on influence mechanism of DC-side voltage fluctuation on circulating current of modular multilevel converter and its suppression method[J]. Automation of Electric Power Systems, 2021, 45(15): 122-131.
[15] 潘子迅, 杨晓峰, 赵锐, 等. 不平衡电网下模块化多电平换流器的直流环流均衡策略[J]. 电工技术学报, 2024, 39(2): 541-553. Pan Zixun, Yang Xiaofeng, Zhao Rui, et al. DC circulating current balancing control of modular multilevel converter under unbalanced power grid[J]. Transactions of China Electrotechnical Society, 2024, 39(2): 541-553.
[16] Moon J W, Kim C S, Park J W, et al. Circulating current control in MMC under the unbalanced voltage [J]. IEEE Transactions on Power Delivery, 2013, 28(3): 1952-1959.
[17] 王强钢, 周亦尧, 廖建权, 等. 直流配电网电能质量研究综述[J]. 电力系统自动化, 2023, 47(7): 193-207. Wang Qianggang, Zhou Yiyao, Liao Jianquan, et al. Review on power quality in DC distribution network [J]. Automation of Electric Power Systems, 2023, 47(7): 193-207.
[18] 胡顺全, 陈阿莲, 刘通, 等. 级联H桥储能变流器直流侧纹波电流协同抑制方法[J]. 电力系统自动化, 2024, 48(24): 136-144. Hu Shunquan, Chen Alian, Liu Tong, et al. Cooperative suppression method for DC-side ripple current in cascaded H-bridge energy storage converter [J]. Automation of Electric Power Systems, 2024, 48(24): 136-144.
[19] 李霞林, 郭力, 黄迪, 等. 直流配电网运行控制关键技术研究综述[J]. 高电压技术, 2019, 45(10): 3039-3049.Li Xialin, Guo Li, Huang Di, et al. Research review on operation and control of DC distribution networks[J]. High Voltage Engineering, 2019, 45(10): 3039- 3049.
[20] 原亚雷, 钊翔坤, 徐高祥, 等. 兼顾电压波动抑制的级联H桥STATCOM相间电压平衡控制策略[J]. 电网技术, 2022, 46(4): 1494-1502. Yuan Yalei, Zhao Xiangkun, Xu Gaoxiang, et al. Clustered voltage balance control strategy of cascaded H-bridge STATCOM with suppressing DC voltage fluctuation[J]. Power System Technology, 2022, 46(4): 1494-1502.
[21] 李梦杰, 谢震, 徐上, 等. 弱电网下构网型双馈风电机组直流动态分析及优化控制策略[J]. 电力系统自动化, 2024, 48(14): 129-138. Li Mengjie, Xie Zhen, Xu Shang, et al. DC-link dynamics analysis and optimal control strategy for grid-forming DFIG-based wind turbines in weak grid [J]. Automation of Electric Power Systems, 2024, 48(14): 129-138.
[22] 薛英林, 徐政, 傅闯, 等. 500kV固定式直流融冰装置的静止无功补偿器重构方案[J]. 高电压技术, 2011, 37(12): 3135-3142. Xue Yinglin, Xu Zheng, Fu Chuang, et al. Static var compensator reconstruction scheme of 500 kV fixed DC de-icing device[J]. High Voltage Engineering, 2011, 37(12): 3135-3142.
[23] 傅闯, 饶宏, 黎小林, 等. 直流融冰装置的研制与应用[J]. 电力系统自动化, 2009, 33(11): 53-56, 107. Fu Chuang, Rao Hong, Li Xiaolin, et al. Development and application of DC deicer[J]. Automation of Electric Power Systems, 2009, 33(11): 53-56, 107.
[24] IEEE Power and Energy Society. IEEE guide for direct-current ice-melting technology of overhead transmission lines: IEEE Std 3133—2023[S]. New York: IEEE, 2023.
[25] 吴小刚, 何锐. 全桥MMC型直流融冰装置关键参数及装置容量解耦分析研究[J]. 南方能源建设, 2023, 10(5): 72-79. Wu Xiaogang, He Rui. Research on the key parameters and device capacity decoupling analysis of full bridge MMC DC ice-melting device[J]. Southern Energy Construction, 2023, 10(5): 72-79.
[26] 武鸿, 王跃, 刘熠, 等. 基于广义电容电压不平衡度的MMC子模块开路故障诊断策略[J]. 电工技术学报, 2023, 38(14): 3909-3922. Wu Hong, Wang Yue, Liu Yi, et al. Open circuit fault diagnosis strategy of MMC sub-module based on generalized capacitor voltage unbalance[J]. Transactions of China Electrotechnical Society, 2023, 38(14): 3909-3922.
Abstract Direct current (DC) de-icing devices are essential equipment for ensuring the safe and stable operation of power grids in regions frequently affected by severe icing disasters, as they enable rapid removal of ice accretion on transmission lines. Among various de-icing technologies, the modular multilevel converter (MMC)-based DC de-icing system has emerged as a mainstream solution due to its advantages of compact capacity, high efficiency, flexible connection topology, and low reactive power demand. However, under existing DC current control schemes, such systems generally encounter prominent DC voltage fluctuation problems. These fluctuations may induce circulating current distortion in converter arms and capacitor voltage imbalance among submodules, which pose significant challenges to system stability and long-term reliability.
To address these problems, this study systematically investigates the underlying mechanism of DC voltage fluctuation from a control system perspective. Firstly, through mathematical modeling and theoretical analysis, the fundamental cause of voltage fluctuation is identified. It is demonstrated that the observed DC voltage oscillations do not stem from control precision limitations, but are caused by the clamping effect of the current control loop on the modulation voltage. This clamping leads to frequent variations in the number of inserted submodules per phase, resulting in significant DC voltage disturbances. Secondly, based on the identified mechanism, a modified control strategy is proposed. The core idea combines modulation DC voltage rounding with adaptive switching of the DC current reference value. Specifically, the modulation voltage is constrained to integer multiples of the rated submodule capacitor voltage, stabilizing the submodule configuration. Simultaneously, the DC current reference value is adaptively adjusted according to the dynamic state of the system, thereby suppressing submodule switching fluctuations and improving DC voltage stability. Thirdly, to eliminate steady-state current deviations introduced by reference value switching, a real-time current state monitoring mechanism is further incorporated. This mechanism continuously detects and compensates for steady-state current errors, thereby enhancing current control accuracy and improving steady-state performance of the system. Finally, simulation studies verify that the proposed control strategy effectively suppresses DC voltage oscillations, mitigates arm circulating current distortion, and reduces capacitor voltage imbalance. As a result, both the dynamic performance and operational stability of the MMC-based DC de-icing system are significantly improved while still meeting the required de-icing current amplitude without additional hardware or complex modifications.
In conclusion, this research clarifies that: (1) The inability to maintain the modulation DC voltage as integer multiples of submodule rated capacitor voltage under existing control schemes is the root cause of DC voltage fluctuation in MMC-based DC de-icing devices. (2) The proposed control strategy, integrating voltage rounding and adaptive reference adjustment, fundamentally suppresses configuration-induced voltage disturbances. The additional current state monitoring further refines steady-state current accuracy. The solution offers a practical approach for improving MMC de-icing system performance within existing hardware configurations, without the need for supplementary filtering equipment or hardware redesign.
keywords:MMC-based DC de-icing, DC voltage fluctuation, DC current deviation, DC current control loop, nearest level control
DOI: 10.19595/j.cnki.1000-6753.tces.250693
中图分类号:TM77
国家自然科学基金青年科学基金(52207129)和国家自然科学基金杰出青年科学基金(52025071)资助项目。
收稿日期 2025-04-25
改稿日期 2025-06-10
闫 旭 男,2000年生,硕士研究生,研究方向为电力系统保护与控制等。E-mail:yanxu_tju@163.com
何佳伟 男,1991年生,博士,副研究员,博士生导师,研究方向为柔性交直流电网保护控制、新能源电力系统保护控制等。E-mail:hejiawei_tju@126.com(通信作者)
(编辑 李 冰)