 (1)
(1)
摘要 针对锂离子电池锂枝晶生长导致内阻及极化电容波动引发的荷电状态(SOC)估计精度不足问题,该文提出基于蚁狮算法(ALO)与自适应插值改进强跟踪扩展卡尔曼滤波(AISTAEKF)的SOC联合估计方法。首先,分析锂电池脉冲电流密度分布引起的锂枝晶生长特性,考虑锂电池内阻和极化电容变化差异,提出基于ALO算法的端电压与阻容参数的非线性特征分段映射方法;并基于SOC三段式Huber损失函数,衡量模型端电压预测值与实测值偏差,构建全局参数辨识模型。然后,基于锂枝晶生长影响的电压、电流波动,提出线性伪插值方法,补偿电压对电流方向变化的滞后响应;基于强跟踪算法的渐消因子,修正SOC估计误差协方差矩阵,提升容量状态突变跟踪能力;引入噪声自适应机制,利用遗忘因子动态调整过程与测量噪声协方差参数,增强算法鲁棒性。实验结果表明,所提的SOC估计方法在不同温度与工况下均具有较强的普适性与稳定性。
关键词:锂离子电池 锂枝晶 荷电状态 蚁狮优化算法 自适应插值 改进强跟踪扩展卡尔曼滤波
荷电状态(State of Charge, SOC)作为锂电池管理系统的核心参数,在电动汽车运行中发挥着关键作用。其精确估计直接关系到电池系统的安全管理效能、充放电策略优化以及整车能量管理水平的提升[1-4]。
精确的电池模型是实现高精度SOC估计的基础[5-7],国内外专家聚焦于最小二乘法及其衍生算法的电池模型参数辨识方法。文献[8]考虑电池老化过程中历史数据比重增加导致模型参数辨识精度降低,引入遗忘因子和采样频率,提出最小二乘法的锂电池内短路全寿命周期模型参数在线辨识方法,实时调整数据结构;文献[9]提出一种基于多新息最小二乘法的锂电池参数辨识策略,基于递归最小二乘(Recursive Least Squares, RLS)辨识算法将电池输出电压观测值与模型响应值差的标量值扩展为向量值或矩阵值;文献[10]提出一种基于遗忘因子最小二乘法的环境温度依赖的锂离子电池双极化模型,将模型参数拟合为环境温度的连续函数,解决了环境温度变化下电池参数波动造成的辨识不准确问题;文献[11]针对传统算法中单一遗忘因子无法精准适配估计需求问题,引入多可变遗忘因子,独立修正模型内阻、极化电容和极化电阻的估计误差,实现电池模型参数辨识。综上所述,参数辨识方法主要为递推最小二乘法的衍生算法,解决传统参数辨识方法对历史数据分配权重高以及单一遗忘因子难以兼顾欧姆内阻、极化电容和极化电阻等多参数协同辨识需求的问题。
针对电池动态特性变化与噪声干扰的复杂耦合特性,当前高精度SOC估计研究主要聚焦于自适应滤波算法的优化创新与多时间尺度协同建模方法的突破。文献[12]针对动力电池非线性时变特性导致的过程噪声非稳态问题,引入自适应卡尔曼滤波算法,正定性优化SOC估计噪声协方差矩阵计算方式;文献[13]利用扩展卡尔曼滤波(Extended Kalman Filter, EKF)与粒子群优化算法(Particle Swarm Optimization, PSO),通过EKF生成重要性密度函数解决粒子滤波的粒子退化问题,利用PSO动态优化重采样粒子分布,增强算法对非线性系统的适应性,提升SOC估计精度;文献[14]考虑欧姆极化与浓差极化的响应速度差异,提出开窗估计原理,通过滑动窗口的电压新息实时估计协方差函数,映射模型对不同时间尺度动态响应的跟踪性能,解决传统方法因固定窗口导致的滞后问题;文献[15]考虑状态估计过程中噪声时变与非线性特性,提出自适应扩展粒子滤波算法,根据状态向量预测的准确度自适应地调整噪声协方差,并利用扩展卡尔曼滤波实现粒子分布函数的局部线性化,映射算法对非线性强耦合系统的鲁棒性;文献[16]基于比例-积分-微分(Proportion-Integration-Differentiation, PID)控制原理设计SOC初值补偿策略,映射初值误差对SOC估计的累积影响,通过PID反馈调节初值偏差,并优化EKF算法中的状态变量修正过程,解决初始SOC误差大导致估计收敛慢的问题,提升估计稳定性。综上所述,基于拓展卡尔曼滤波衍生算法可实现SOC在线估计,但估计过程中存在延迟效应,使得动态工况下SOC估计的鲁棒性降低。
锂电池不同倍率脉冲工况下,脉冲电流密度与电势分布的差异性会阻碍锂枝晶浓差极化的离子浓度平衡建立,引发弛豫过程导致极化电压滞后响应。本文结合锂枝晶生长特性,构建二阶等效电路模型阻容参数阶跃式增长特性的映射关系;基于蚁狮优化(Ant Lion Optimization, ALO)算法设计三段式阻容参数寻优方法,采用Huber损失函数评估模型端电压预测值与实测值偏差,建立全局参数辨识模型。引入电压、电流线性伪插值方法,补偿电压对电流方向变化的滞后响应;利用自适应插值改进强跟踪自适应扩展卡尔曼滤波(Adaptive Interpolation improved Strong Tracking Adaptive Extended Kalman Filter, AISTAEKF)算法中的渐消因子调整SOC估计误差协方差矩阵,提升容量状态突变跟踪能力;设计噪声自适应机制动态优化过程与测量噪声协方差参数,增强状态转移过程对浓差极化动态响应的捕捉精度,提升鲁棒性,有效应对锂枝晶生长导致的电池内部结构变化及非高斯量测噪声的不确定性影响。最后,通过混合功率脉冲特性(Hybrid Pulse Power Characteristic, HPPC)实验、动态应力测试(Dynamic Stress Test, DST)、城市道路循环(Urban Dynamometer Driving Schedule, UDDS)和高速公路行驶(US06)等多工况实验,验证ALO-AISTAEKF算法的有效性。
锂电池在充放电过程中,尤其是快充或过充条件下,锂离子易在负极表面发生不均匀沉积,形成锂枝晶,引发电池内阻、极化内阻和极化电容的非规律性变化,其中枝晶长度与内阻R的经验公式[17]为
(1)
式中,L为枝晶长度(mm);K1、K2为拟合常数; 为时间常数(s)。
为时间常数(s)。
图1所示为25℃下恒流充放电时不同时刻脉冲电流密度分布及锂枝晶形貌。随着锂枝晶持续生长并逐渐穿透固态电解质界面(Solid Electrolyte Inter- phase, SEI)膜,将导致欧姆内阻呈现阶跃式上升,同时极化内阻发生非线性变化。电池原本均匀的电流分布被打乱,内部不同区域的电流大小和方向发生改变,如图1所示,导致离子扩散路径和速度异常,其他温度环境下形貌特征变化类似,均随SOC增加锂枝晶呈现增长态势。同时,相比与常温,低温下形成的SEI膜相对较薄且不稳定,易破碎,不能有效钝化负极,锂离子电流密度分布相对更不均匀,锂枝晶生长稍快;高温下形成的SEI膜通常更厚、更稳定,机械强度更高,能更好地钝化金属锂负极,锂枝晶生长受到一定抑制。文献[17-18]指出,当锂电池电流密度恒定时,枝晶生长速率越高,维持恒定电流所需的电压梯度越大,内阻越高。浓差极化方面,离子浓度平衡建立受阻,回到平衡状态时间大幅增加,恢复时间延长,影响电池弛豫特性。
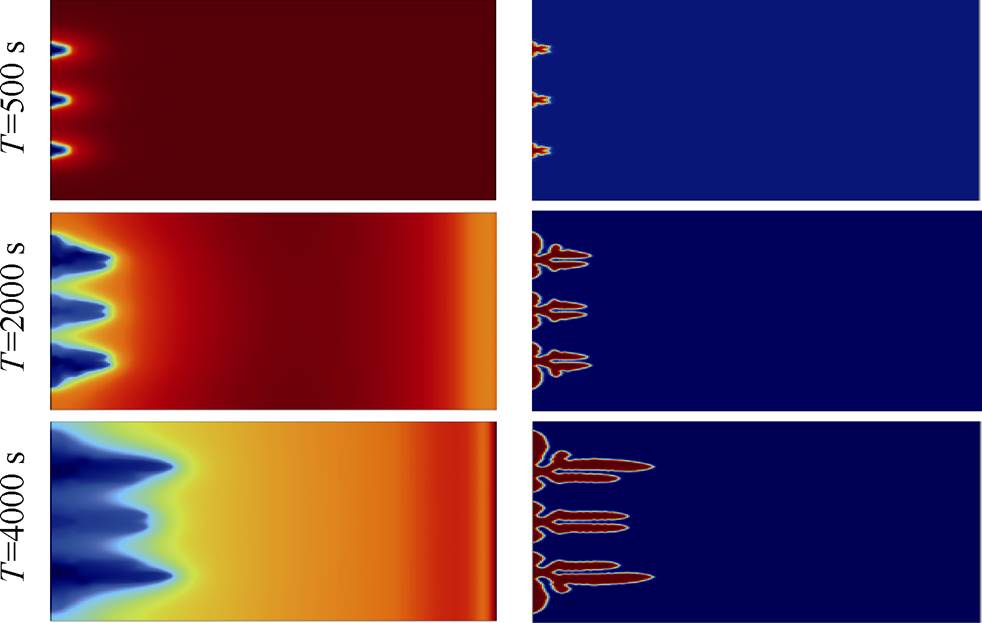
图1 不同时刻脉冲电流密度分布及锂枝晶形貌
Fig.1 Pulsed current concentration distribution at different times and lithium dendrite morphology
理想情况下,锂电池恒流充放电时的电压应呈现平滑变化曲线。然而,受锂枝晶效应影响,内阻的波动会导致电压扰动。图2展示了0.05C和0.1C倍率下恒流充放电的端电压-时间曲线。理论分析表明,若不考虑锂枝晶影响,0.1C完全放电时间(SOC从1降至0)应为0.05C的50%。但实测数据显示,0.1C和0.05C的实际放电时间分别为38 564 s和80 795 s,时间缩短幅度达52.3%。差异表明:在0.05C低倍率放电时,端电压变化平缓,锂枝晶对内阻影响弱,电化学过程相对稳定;而0.1C高倍率放电时,端电压波动增强,反映锂枝晶引发内阻波动剧烈。增大的内阻导致能量损耗增加,从而缩短实际放电时间。结果表明了不同倍率下锂枝晶特性的差异和实际放电容量低于理论值的情况。同时,充放电倍率的改变会影响电流密度分布而加剧极化现象,对SOC估计精度产生干扰。
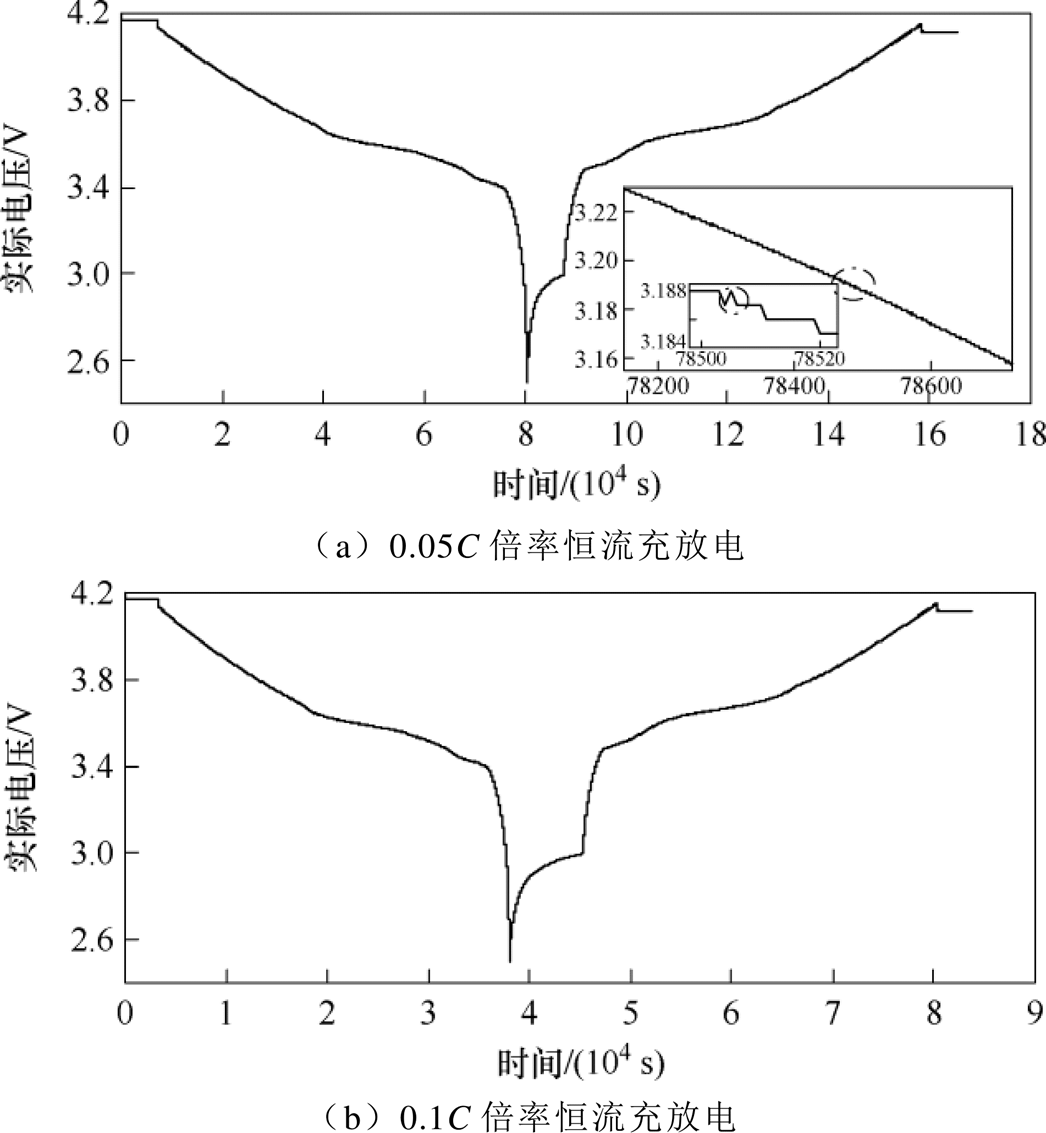
图2 不同倍率恒流充放电
Fig.2 Different rates constant current charge-discharge
建立二阶RC等效电路模型如图3所示。其中,R1和C1、R2和C2分别电化学极化电阻和电容、浓差极化电阻和电容,UOC和U分别为电池开路电压和端电压,I为电池充放电电流,R0为欧姆内阻。
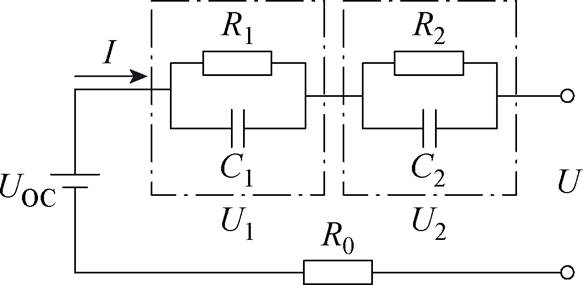
图3 二阶RC等效电路模型
Fig.3 Second-order RC equivalent circuit model
由基尔霍夫定律可得电路时域方程为
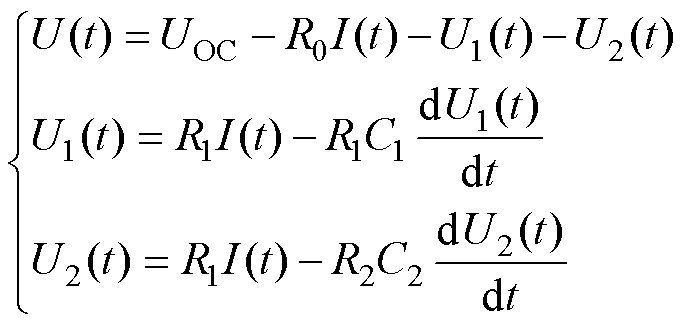 (2)
(2)
式中,U1和U2分别为R1和R2两端的压差。
选取典型18650锂电池作为研究对象,额定容量为2 A·h、电压范围为[2.5 V, 4.2 V]。采用静置 法[19]和7次多项式拟合考虑电压滞后效应的固定测量点的OCV与SOC函数关系[20],如图4所示。

 (3)
(3)
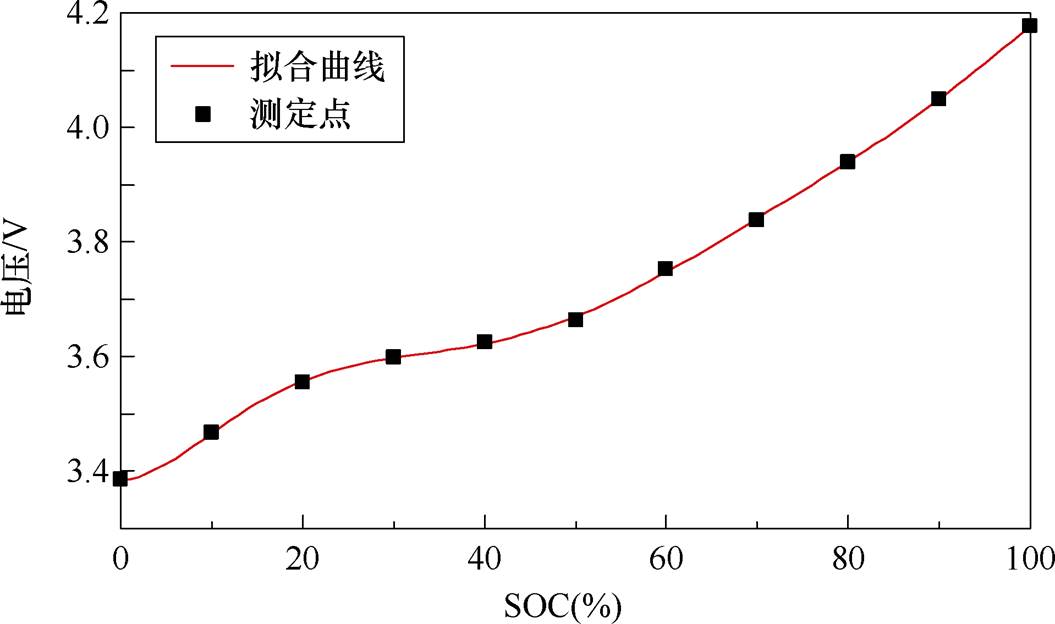
图4 SOC-OCV曲线
Fig.4 SOC-OCV curve
锂电池电压和电流作为状态变量,可间接反映内阻及极化电容的动态变化特性;ALO通过蚁狮群体觅食行为,可自适应调节惯性权重和弹性边界收缩参数[21],实现对电池电压与模型阻容参数非线性特性的精确拟合。
将电流It作为蚂蚁移动输入量,模型估计端电压 作为输出量,并通过构建适应度函数,建立二阶等效模型参数辨识流程如图5所示。
作为输出量,并通过构建适应度函数,建立二阶等效模型参数辨识流程如图5所示。
(1)随机初始化参数集X={R0, R1, R2, C1, C2}。设置最大容量和迭代次数分别为50、100次,其中R0、R1、R2∈[0.001, 1],C1、C2∈[0, 5 000],适应度、调整量Dx初值分别设为0.001、0.01,适应度值改变量小于1×10-8或最大迭代次数达到100次时,参数辨识终止。
(2)以X适应度最好参数确定最优参数集Xbest。
基于文献[17],不同工况下电池内阻和极化电容等参数变化规律呈现近似特征:高SOC阶段(80%~100%),内阻和极化电容大幅波动,锂枝晶生长快,参数变化复杂且剧烈;中SOC阶段(20%~80%),内阻和极化电容受锂枝晶生长影响变小,波动逐渐减缓,参数变化呈非线性;在低SOC阶段(0~20%),电池内阻低且变化平缓,极化电容相对稳定,锂枝晶生长慢,对参数影响小。
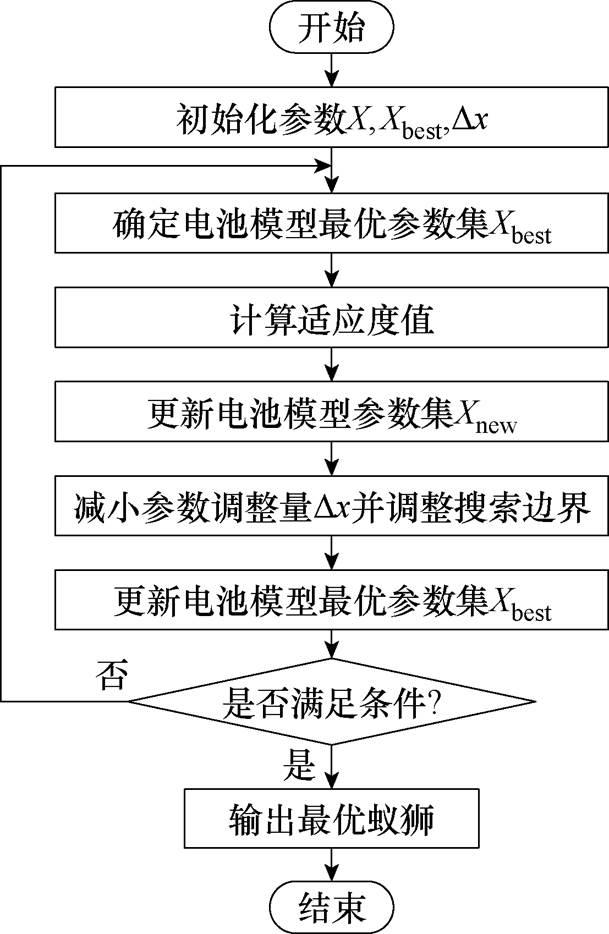
图5 ALO算法流程
Fig.5 ALO algorithm flow chart
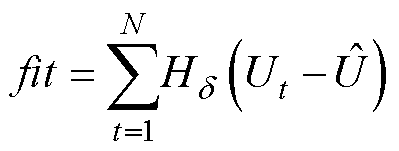
以模型预测端电压与实测端电压Ut的误差作为Huber损失,构建适应度函数fit。针对SOC低、中、高段差异,提出Huber损失阈值参数d分别为d1、d2、d3的方法,确定小误差与大误差设定方式。通过分段寻优和误差修正,得到模型参数R0、R1、R2及C1、C2的最优值。
 (4)
(4)
式中, 为Huber损失函数,定义为
为Huber损失函数,定义为
 (5)
(5)
式中, 。
。
(3)基于阻容参数集与参数调整量Dx,根据式(6)更新位置Xnew。每轮迭代中,对比参考参数集,计算适应度函数fit,获取与Ut的Huber损失函数最小的参数组合。
 (6)
(6)
式中,X为参数值;D表示[-1, 1]随机方向向量。
(4)利用式(7)减小调整量Dx,实现从全局搜索向局部搜索的过渡,调整阻容模型参数集X和阻容最优参数集Xbest的搜索边界,确保迭代在边界内移动。
 (7)
(7)
式中, 为初始参数调整量;k为迭代次数;kmax为最大迭代次数。
为初始参数调整量;k为迭代次数;kmax为最大迭代次数。
设计分阶段老化实验方案:首先进行多温度HPPC工况实验,第100次循环后实施DST工况测试,第200次循环后进行UDDS工况测试,第300次循环时开展US06工况测试。
基于蚁狮优化(ALO)算法实现了锂电池二阶等效电路模型的最优阻抗参数辨识,即以最小化Huber损失函数为优化目标获取最优阻抗参数集。图6展示了在HPPC、DST、UDDS和US06四种工况下的参数辨识结果。
基于HPPC、UDDS、US06多工况d组合,对比分析模型端电压拟合精度影响,见表1,确定d1、d2、d3分别为0.000 5、0.001、0.002。
扩展卡尔曼滤波(EKF)算法通过结合安时积分法建立的状态空间方程(用于描述线性系统动态特性)和基于开路电压法构建的观测方程[22],可利用二阶等效模型中的电阻、电容等参数特性,结合实时采集的电压、电流数据,通过递推计算获取电池SOC。
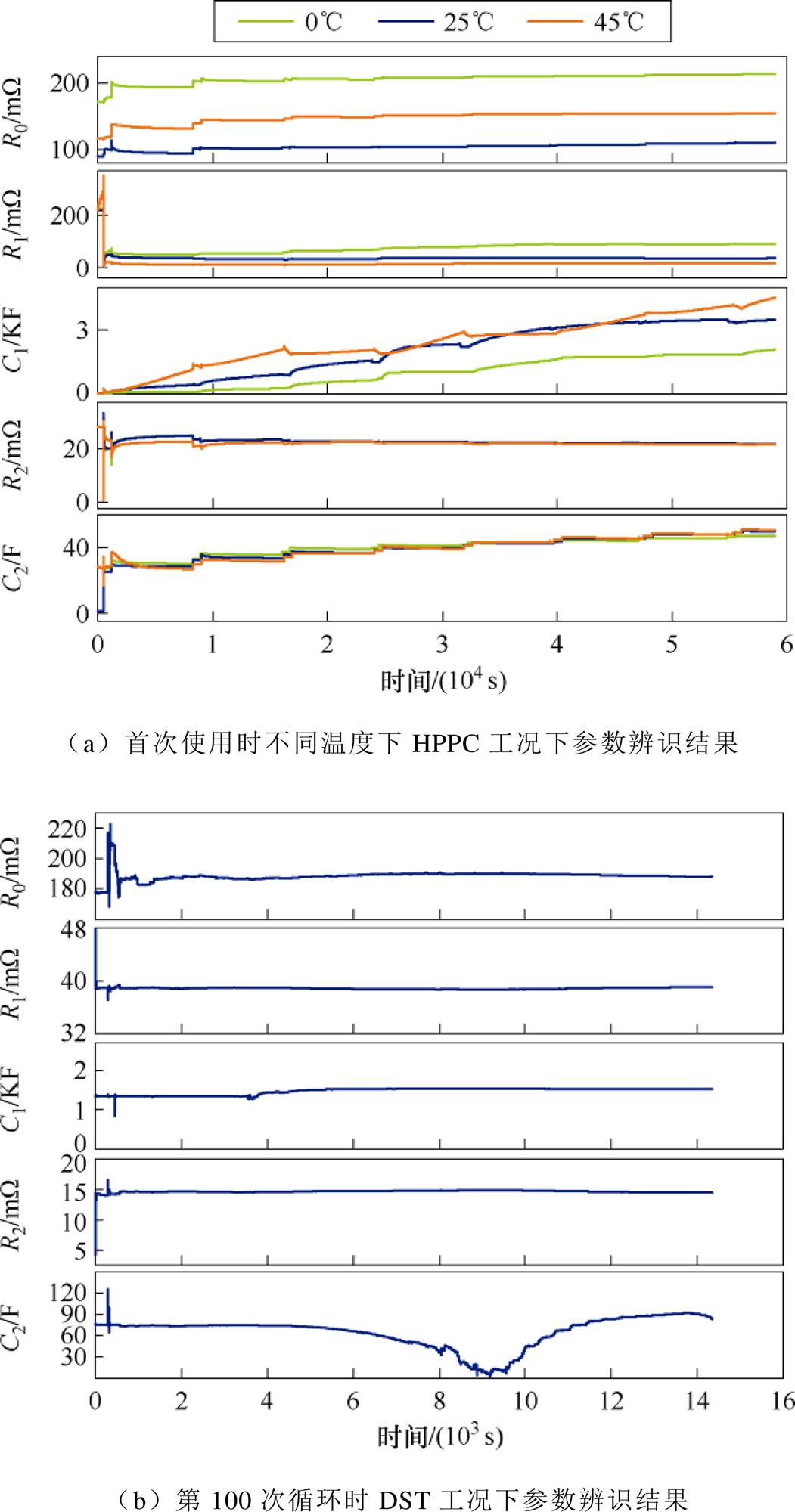
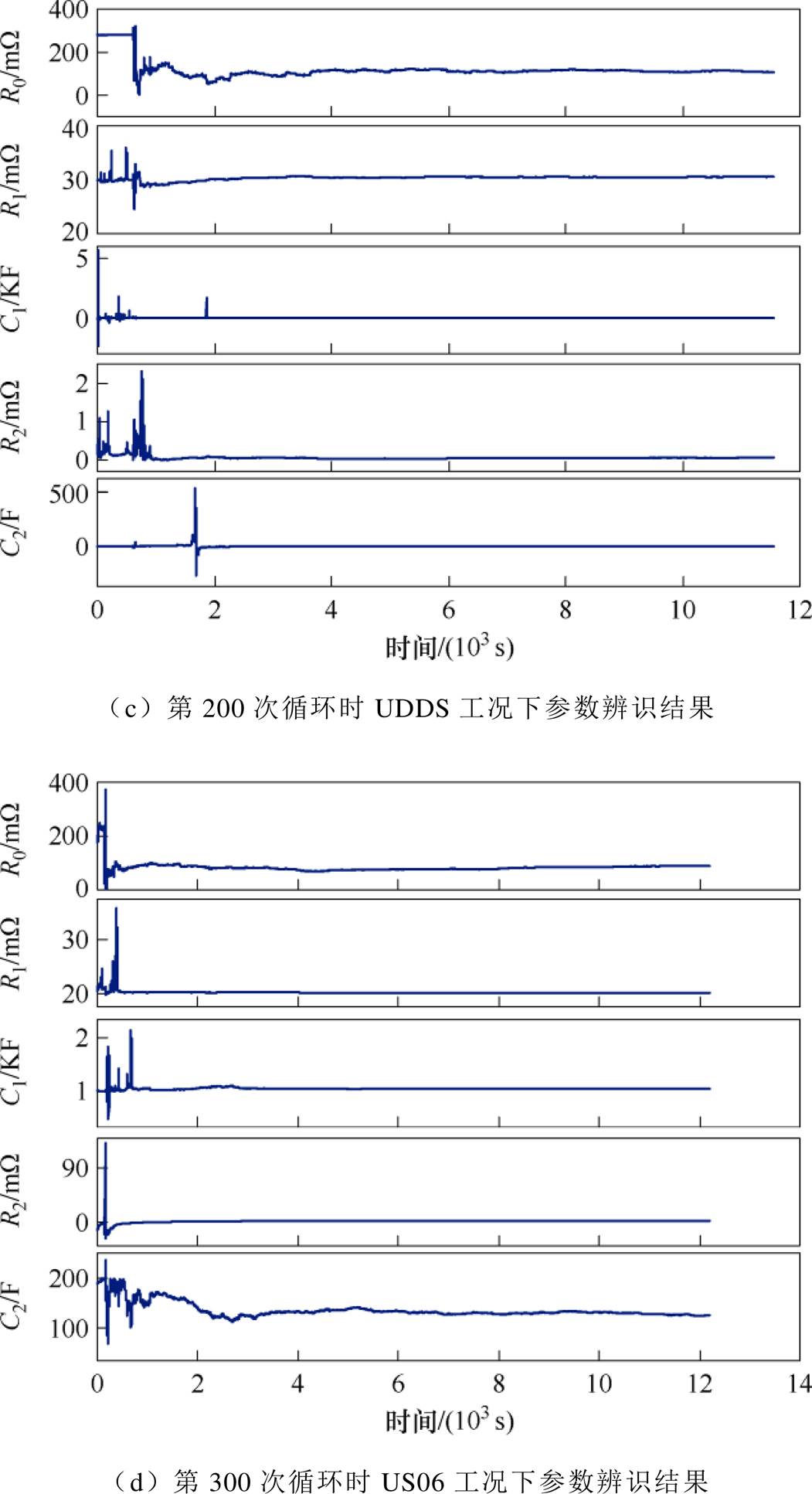
图6 参数辨识结果
Fig.6 Parameter identification results
表1 多工况下阈值参数d组合对比实验
Tab.1 Combination comparison experiments for threshold parameter d under various operating conditions

工况参数组合d1d2d3RMSE/ mV误差增幅 (%) HPPC组合10.000 50.0010.0025.354 5 组合20.0010.0010.0016.13212.7 组合30.000 30.000 80.00155.8768.9 UDDS组合10.000 50.0010.00210.789 组合20.0010.0010.00113.25718.6 组合30.000 40.00090.001 811.5626.7 US06组合10.000 50.0010.00211.328 组合20.000 30.000 70.002 512.1546.8 组合30.000 60.001 20.001 511.8934.8
假定k时刻电池电压等状态量、电流等输入参数、观测量分别为xk、uk、zk,状态方程和量测方程分别为f(xk, uk)、h(xk, uk),则电池系统离散化空间方程为
 (8)
(8)
 (9)
(9)
其中

式中,T为采样间隔; =R1C1和
=R1C1和 =R2C2;Qc为电池容量;
=R2C2;Qc为电池容量; 为高斯分布的系统过程噪声;vk为传感器测量噪声。
为高斯分布的系统过程噪声;vk为传感器测量噪声。
基于EKF算法的SOC估计迭代过程如下。
(1)变量初始化
 (10)
(10)
(2)迭代过程为
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
 (15)
(15)
式中, 和
和 分别为k时刻系统状态量的先验估计和后验估计;Kk为卡尔曼滤波增益;
分别为k时刻系统状态量的先验估计和后验估计;Kk为卡尔曼滤波增益; 和
和 分别为k时刻系统状态量的误差协方差矩阵的先验估计和后验估计;Qk为过程噪声wk的协方差;Rk为测量噪声vk的协方差。。
分别为k时刻系统状态量的误差协方差矩阵的先验估计和后验估计;Qk为过程噪声wk的协方差;Rk为测量噪声vk的协方差。。
锂电池等效电路模型中,欧姆内阻导致的电压变化表现为线性特性,而受锂枝晶动态生长影响,极化内阻和极化电容引起的极化电压则呈现与电流方向相关的滞后非线性响应。由式(7)所示的EKF算法实现中,仅采用低阶项构建雅可比矩阵进行线性化处理,导致高阶非线性项被忽略并产生误差累积效应。为此,本文提出基于有限状态机模型的插值因子伪测量值的自适应插值方法,实时系统状态转移函数和测量函数的非线性度指标计算,有效补偿传统EKF算法中的累积误差问题[23]。
定义nz和nl分别表征锂电池状态方程和量测方程的非线性程度,其物理本质是对电池内部复杂电化学过程偏离线性规律的量化指标。根据式(16)和式(17)计算状态转换函数f(x)的线性化误差ez和非线性指标nz、式(18)和式(19)计算测量函数h(x)的线性化误差el和非线性指标nl。
 (16)
(16)
 (17)
(17)
 (18)
(18)
 (19)
(19)
当nz 1且nl1时,系统动态特性可视为拟线性,无需插值处理;否则,根据实时计算的联合非线性指标,在连续采样点间增加伪量测值,降低状态预测与观测耦合的非线性情况。
1且nl1时,系统动态特性可视为拟线性,无需插值处理;否则,根据实时计算的联合非线性指标,在连续采样点间增加伪量测值,降低状态预测与观测耦合的非线性情况。
自适应插值策略设计如下:
(1)根据式(16)~式(19)计算非线性指标nz和nl。
(2)基于nz和nl,得到状态方程和测量方程偏离线性假设的程度。设置3个线性度状态:状态1对应SOC为80%~100%,线性度高,设定插值因子、阈值分别为r=1、U1=0.25、D1=0.10;状态2对应SOC为20%~80%,设定r=3、U2=0.45、D2=0.20;状态3对应SOC为0~20%,线性度低,设定r=5、U3=0.65、D3=0.30。状态转移逻辑中,当任一指标超过当前状态Ui时,状态升级;当两个指标均低于Di时,状态降级。动态适应SOC非线性变化,尤其SOC较低时,插入更多伪测量值可补偿非线性误差。
图7中,nzi和nli分别表示状态方程和量测方程的非线性指标,下标i为有限状态机的状态编号。选择任一状态阈值时,保证Ui>Di,并且插值因子满足较高状态对应较大的插值因子,即ri+1>ri。
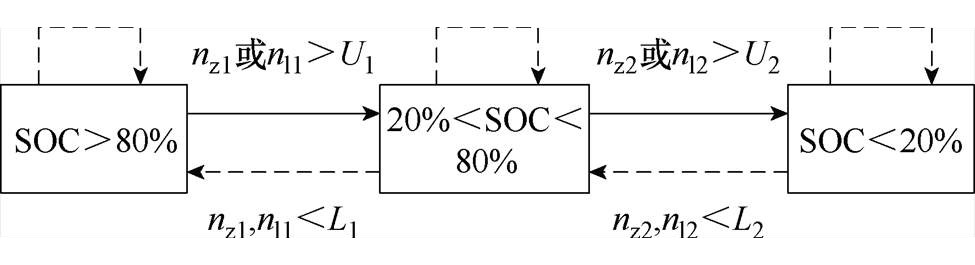
图7 有限状态机(三个状态)
Fig.7 Finite state machine (three states)
(3)对比非线性指标与对应状态阈值,确定当前状态。当状态i对应的任一非线性指标超过阈值上限Ui时,进入更高非线性等级的下一个状态i+1;当状态i两个非线性指标均低于阈值下限Di时,状态机回到前一个状态i-1。参考文献[24],有限状态机插值数目见表2。
表2 插值数目
Tab.2 Interpolation number
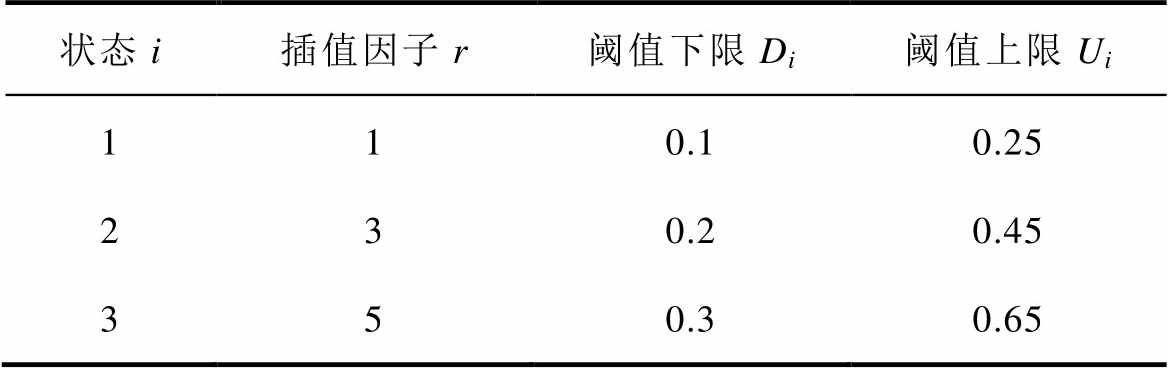
状态i插值因子r阈值下限Di阈值上限Ui 110.10.25 230.20.45 350.30.65
(4)基于线性插值法,相邻电压、电流采样测量值间,增加r个伪测量值。通过EKF得到自适应插值扩展卡尔曼滤波算法(Adaptive Iterative EKF, AIEKF),进行SOC估计。
锂枝晶在初始形成时对锂离子传输干扰小,但随着充放电循环的进行,其持续生长阻碍锂离子传输,导致不同充放电倍率下的电压响应差异扩大、实际可用容量衰减以及测量噪声均值波动加剧。传统EKF算法采用固定噪声参数的线性化系统模型,难以适应锂枝晶生长引发的电池高度非线性和时变特性,其噪声统计特性已不再符合EKF的基本假设。为此,本文提出强跟踪扩展卡尔曼滤波(Strong Tracking EKF, STEKF)算法[25],引入渐消因子,自适应地调整电压和电流滤波权重并修正误差协方差矩阵,解决因容量波动导致的SOC估计精度问题。
将式(12)中引入渐消因子,实时调整先验误差协方差矩阵为
 (20)
(20)
式中,mk为次优渐消因子,mk>1。
 (21)
(21)
其中
 (22)
(22)
 (23)
(23)
 (24)
(24)
 (25)
(25)
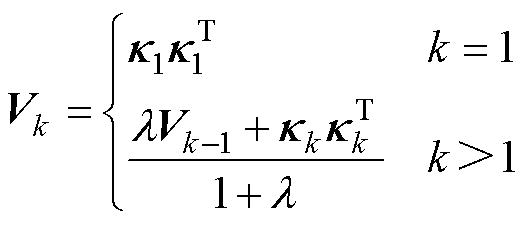
式中,tr(∙)为求迹函数; 为k时刻的量测残差;Vk为残差协方差矩阵;
为k时刻的量测残差;Vk为残差协方差矩阵; 为遗忘因子,取=0.95;a为弱化因子,取a=1.2。
为遗忘因子,取=0.95;a为弱化因子,取a=1.2。
STEKF算法的决策机制依赖等效电路模型参数、系统状态转移方程、测量方程以及噪声统计特性的综合作用。当产生噪声时,通过放大协方差矩阵提高卡尔曼增益;但固定决策标准难以适应反映锂枝晶动态生长及充放电过程复杂变化下的真实状态。因此,基于噪声自适应机制,引入遗忘因子 和
和 ,自适应调整噪声协方差Rk与Qk,如式(26)所示。和越大,Rk和Qk初值权重越大,以保持电池状态较为平缓变化时的估计稳定性;反之,权重越小,则能够快速跟踪锂枝晶生长引发的内阻突变和端电压观测噪声的非平稳特性。
,自适应调整噪声协方差Rk与Qk,如式(26)所示。和越大,Rk和Qk初值权重越大,以保持电池状态较为平缓变化时的估计稳定性;反之,权重越小,则能够快速跟踪锂枝晶生长引发的内阻突变和端电压观测噪声的非平稳特性。
 (26)
(26)
式中,、的取值范围为 ,参考文献[26-27]的∈[0.7, 0.9]、∈[0.8, 0.95],本文经多工况正交实验优化后确定、分别取0.8、0.9。
,参考文献[26-27]的∈[0.7, 0.9]、∈[0.8, 0.95],本文经多工况正交实验优化后确定、分别取0.8、0.9。
基于AISTAEKF的锂电池SOC估计算法流程如图8所示。步骤如下:
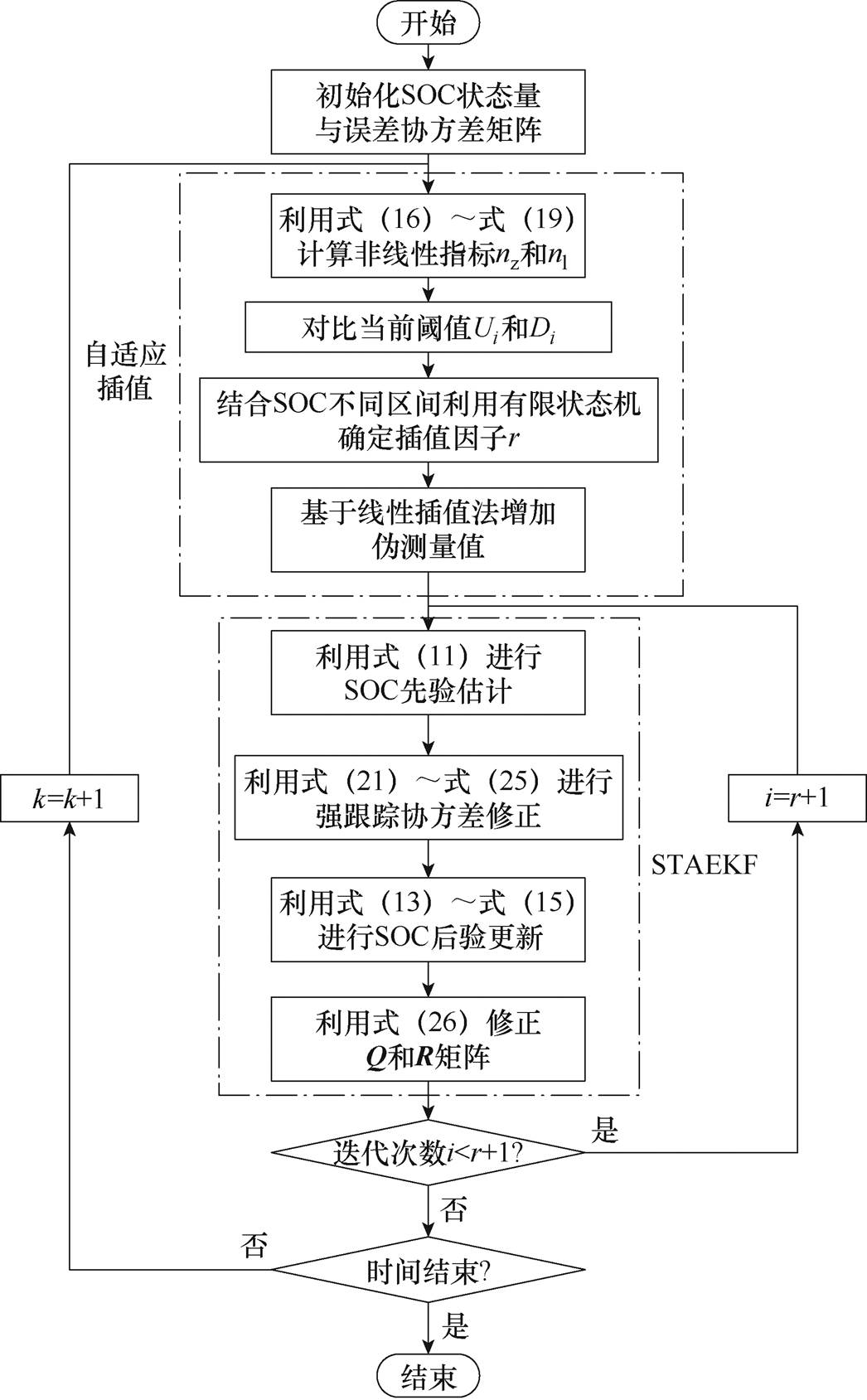
图8 基于AISTAEKF算法的SOC估计
Fig.8 SOC estimation based on AISTAEKF algorithm
(1)根据式(10),初始化锂电池SOC状态量以及误差协方差矩阵。
(2)通过式(16)~式(19)计算非线性指标nz和nl,结合SOC不同区间确定插值因子r,并在相邻测量值线性插入r个值。
(3)利用式(11)估计锂电池SOC;结合强跟踪算法,通过式(21)~式(25)调整先验误差协方差矩阵,同时利用式(26)修正Q和R矩阵后,利用式(13)~式(15)修正SOC状态估计值。
(4)在步骤(3)中完成一次强跟踪过程后,若i<r+1,则重复步骤(3),继续强跟踪过程,进一步优化SOC估计结果。
(5)判断SOC估计过程是否结束。若未结束,则重复步骤(2)和步骤(3),持续估计和优化;若结束,则输出最终SOC估计结果。
搭建如图9所示的锂电池测试平台,设备型号为CT-4008T-5V12A。
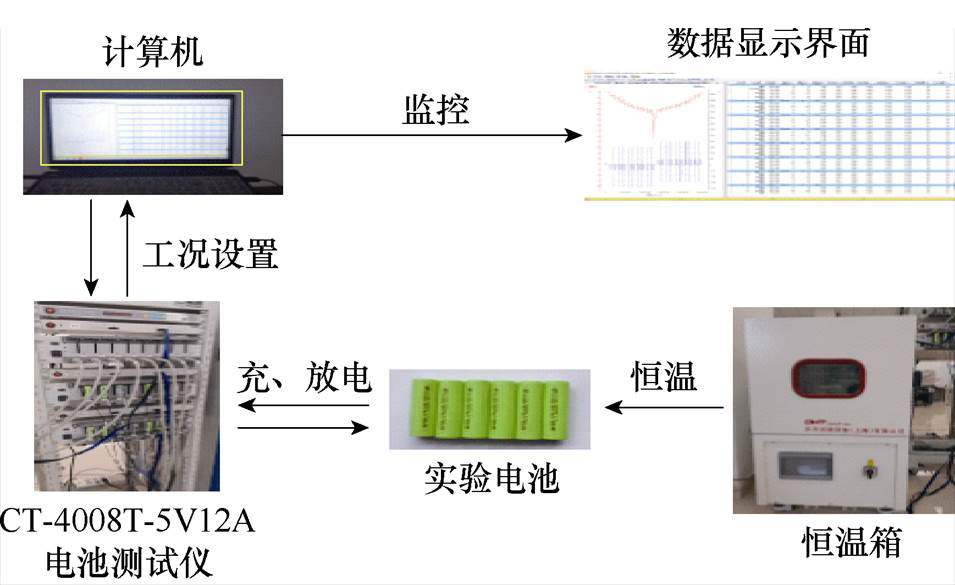
图9 实验设备
Fig.9 Experimental equipment
设计0℃、25℃、45℃不同温度HPPC、DST、UDDS和US06工况下基于不同算法的实验方案,验证等效模型参数辨识方法与SOC估计方法的有效性:
方案一:0℃、25℃、45℃温度梯度下HPPC对比实验:以1C恒定电流将电池充电至4.2 V截止电压,静置1 h后,0.25C恒定倍率间隔10%放电,直至电压降至最低截止电压,验证不同温度梯度下模型参数辨识方法与SOC估计方法的有效性。
方案二:25℃温度下,锂电池经过100、200、300次老化循环时,分别设置DST、UDDS和US06工况实验,验证不同工况下SOC估计方法的有效性。
其中,动态实验设置如下:
(1)DST实验依次以0.25C、0.5C、1C、1.25C和2C的电流倍率进行恒流充放电循环测试,直至电池电量完全耗尽(SOC降至0),模拟城市普通路况变化特征。
(2)UDDS与US06分别模拟城市道路驾驶的典型工况与驾驶循环中高负荷运行工况,充放电电流如图10所示。通过模拟车辆启动时的大电流过程,测试电池在动态负载下响应特性,包括加速、匀速、减速等典型行驶阶段及其循环重复过程,验证高速度与高加速度路况下SOC估计方法的有效性。

图10 UDDS和US06工况实验充放电电流
Fig.10 Charge-discharge current under UDDS and US06
5.2.1 基于方案一三种温度梯度HPPC工况的参数辨识
设置60 000 s测试时长,对比分析ALO和PSO-KF算法的等效模型端电压和误差结果如图11和表3所示。
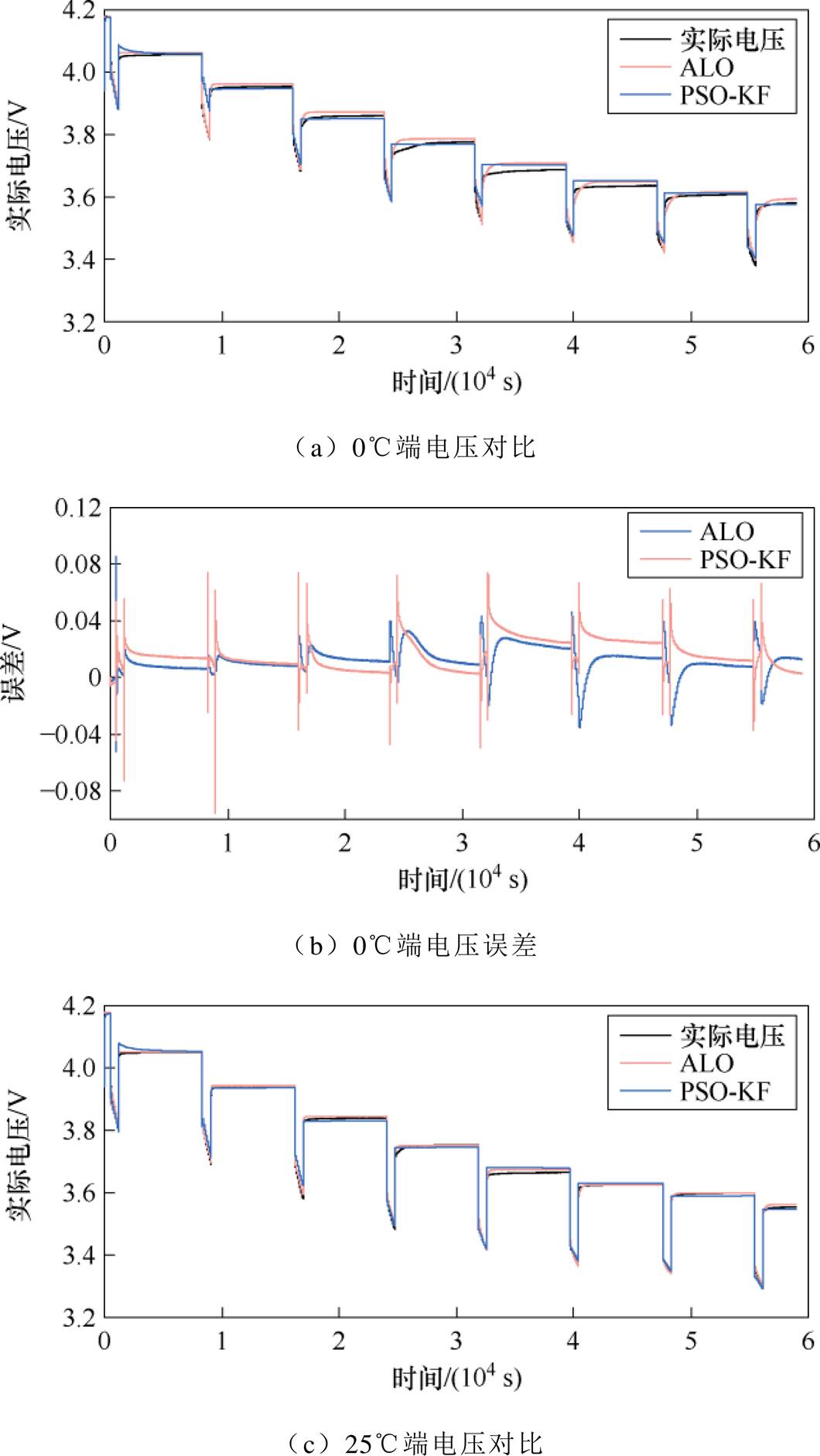
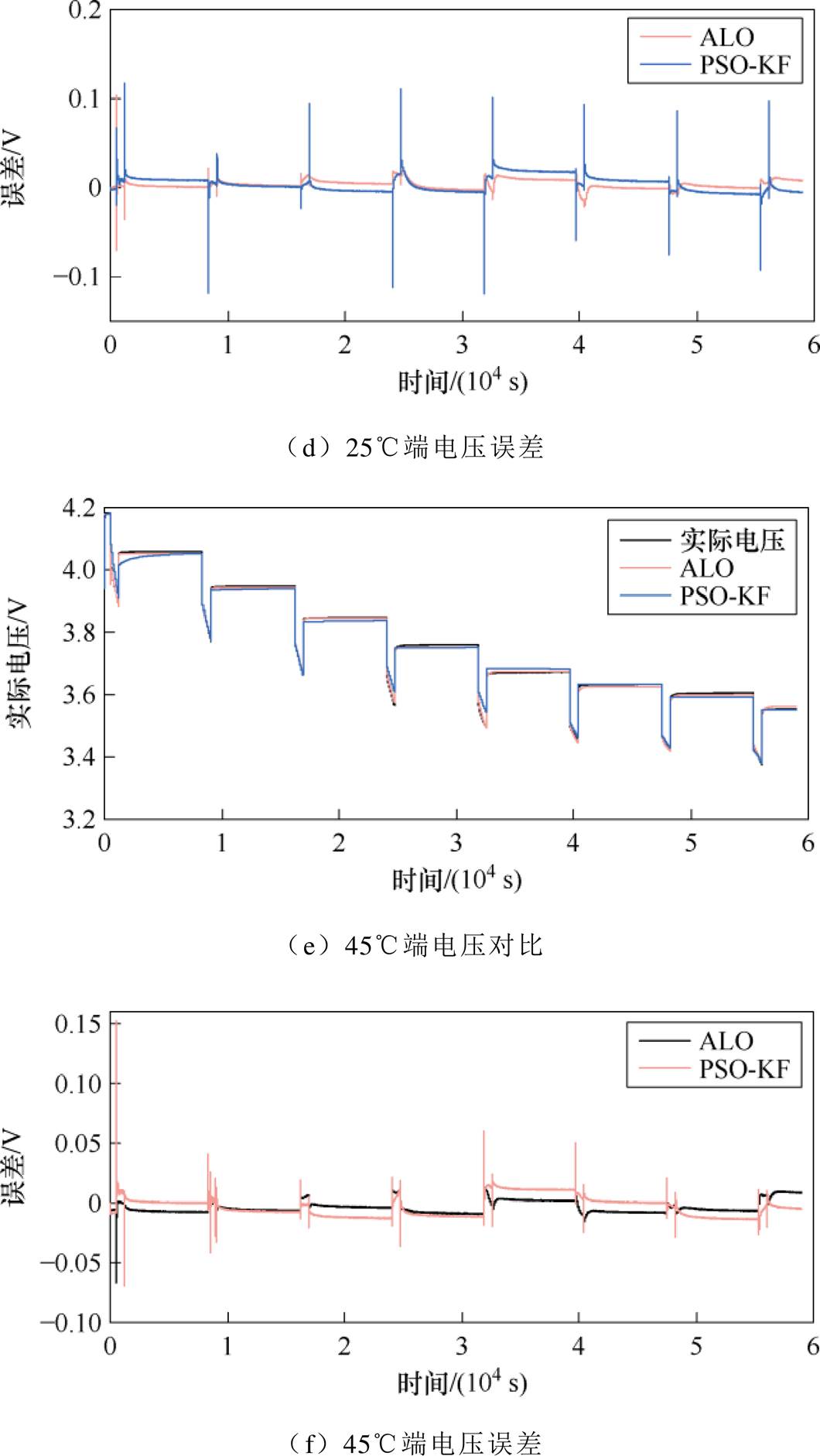
图11 HPPC工况端电压
Fig.11 Terminal voltage under HPPC
由图11和表3可见,HPPC工况的三种温度测试中,基于ALO算法的SOC初始估计的最大误差与PSO-KF算法相近,但其全周期平均误差(Mean Error, ME)、平均绝对误差(Mean Absolute Error, MAE)和方均根误差(Root Mean Square Error, RMSE)均优于PSO-KF算法。从图11a、图11c、
表3 HPPC工况端电压误差
Tab.3 Terminal voltage error under HPPC (单位: mV)
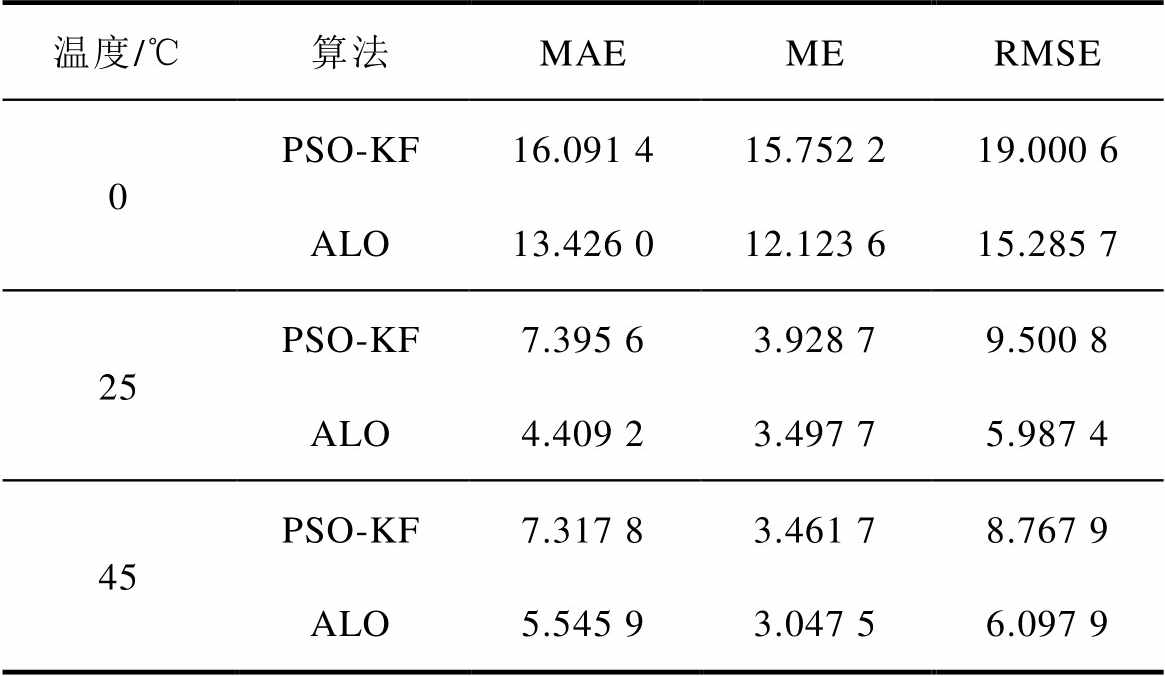
温度/℃算法MAEMERMSE 0PSO-KF16.091 415.752 219.000 6 ALO13.426 012.123 615.285 7 25PSO-KF7.395 63.928 79.500 8 ALO4.409 23.497 75.987 4 45PSO-KF7.317 83.461 78.767 9 ALO5.545 93.047 56.097 9
图11e可以看出,三种温度下,25 000 s附近均出现实际电压恢复缓慢特征,但相比25℃、45℃, 0℃时实际电压恢复更加缓慢。这是由于温度对锂枝晶生长速率、内阻及极化行为具有影响,低温下枝晶成核速率加快、生长抑制效应减弱,导致电池内部欧姆内阻与极化电容参数漂移加剧,使电压恢复过程呈现更加严重的非线性拖尾。具体而言,0℃、25℃和45℃下,ALO算法分别使等效模型参数估计ME降低23.04%、10.97%和11.97%,MAE降低16.56%、40.38%和24.21%,RMSE降低19.55%、36.98%和30.45%。其原因为:ALO算法能够自适应拟合不同温度下极化参数的非线性动态变化,特别是在脉冲结束后的弛豫阶段,对极化电压滞后响应的跟踪更为精确。相比之下,PSO-KF算法由于全局搜索能力不足,在锂枝晶生长导致等效模型参数突变时易陷入局部最优,如图11b所示,在10 000 s附近的脉冲电流放电结束时,其对极化内阻和极化电容引起的极化电压滞后响应的跟踪误差明显高于ALO算法。
实验证明,在不同温度HPPC工况下,考虑锂枝晶生长导致的内阻阶跃式增长,极化参数非线性波动引起的极化电压滞后现象,ALO引入分段Huber损失和适应度计算,导致等效模型参数获取计算复杂性稍高于无迭代的FFRLS算法和迭代计算的PSO-KF算法。但ALO算法能有效捕捉锂电池充放电过程等效模型欧姆内阻的阶跃式增长特性,降低模型与实际端电压误差。
5.2.2 基于方案二三种动态工况的参数辨识
1)DST工况
设置测试时长为14 000 s,对比分析基于ALO、PSO-KF和FFRLS算法的等效电路模型端电压和误差分别如图12和表4所示。

图12 DST工况下不同算法端电压
Fig.12 Terminal voltage based on various algorithms under DST
表4 DST工况端电压误差
Tab.4 Terminal voltage error under DST (单位: mV)
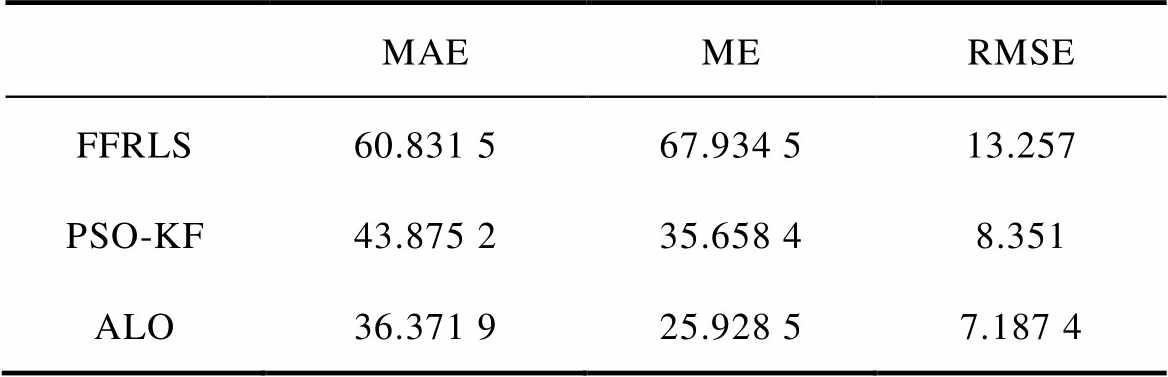
MAEMERMSE FFRLS60.831 567.934 513.257 PSO-KF43.875 235.658 48.351 ALO36.371 925.928 57.187 4
由图12和表4可见,相较于FFRLS和PSO-KF,ALO算法在SOC估计的等效电路模型参数辨识初期(0~200 s)表现出相对稳定的特性,虽初始精度略低,但对长期参数辨识结果影响较小。200 s后,ALO算法的收敛速度显著提升,参数辨识精度优于传统算法,原因为:①初期锂枝晶生长缓慢,此时FFRLS和PSO-KF算法对平稳数据具有更好的适应性;②ALO算法初期在较大参数空间进行全局探索,导致[0 s, 200 s]区间存在参数抖动;③迭代次数增加,ALO算法逐步聚焦最优解区域,可建立全局搜索的优势,能更准确地捕捉锂电池长期动态特性。定量分析表明,相比FFRLS和PSO-KF,ALO算法的平均绝对误差、平均误差、方均根误差分别下降40.21%、61.83%、45.78%和17.10%、27.30%、13.93%。
2)UDDS和US06工况
设置测试时长分别为11 563 s和12 191 s,对比分析基于ALO、PSO-KF和FFRLS算法的等效电路模型端电压和误差如图13和表5所示。
由图13和表5可见,相较于FFRLS和PSO-KF,ALO算法在整个等效模型参数估计周期内保持较小的误差波动范围。具体表现为:①如图13d所示,FFRLS算法全程误差明显偏高;②4 600 s附近电流突增导致内阻阶跃变化时,PSO-KF算法因粒子群优化机制中惯性权重调整滞后,难以快速响应参数非线性突变,误差急剧上升。定量对比显示,相较于FFRLS算法,ALO算法平均绝对误差、平均误差、方均根误差分别下降68.12%、75.22%、71.27%和67.99%、73.73%、69.43%;相较于PSO-KF算法,分别下降36.35%、43.39%、53.59%和18.33%、34.75%、50.25%。
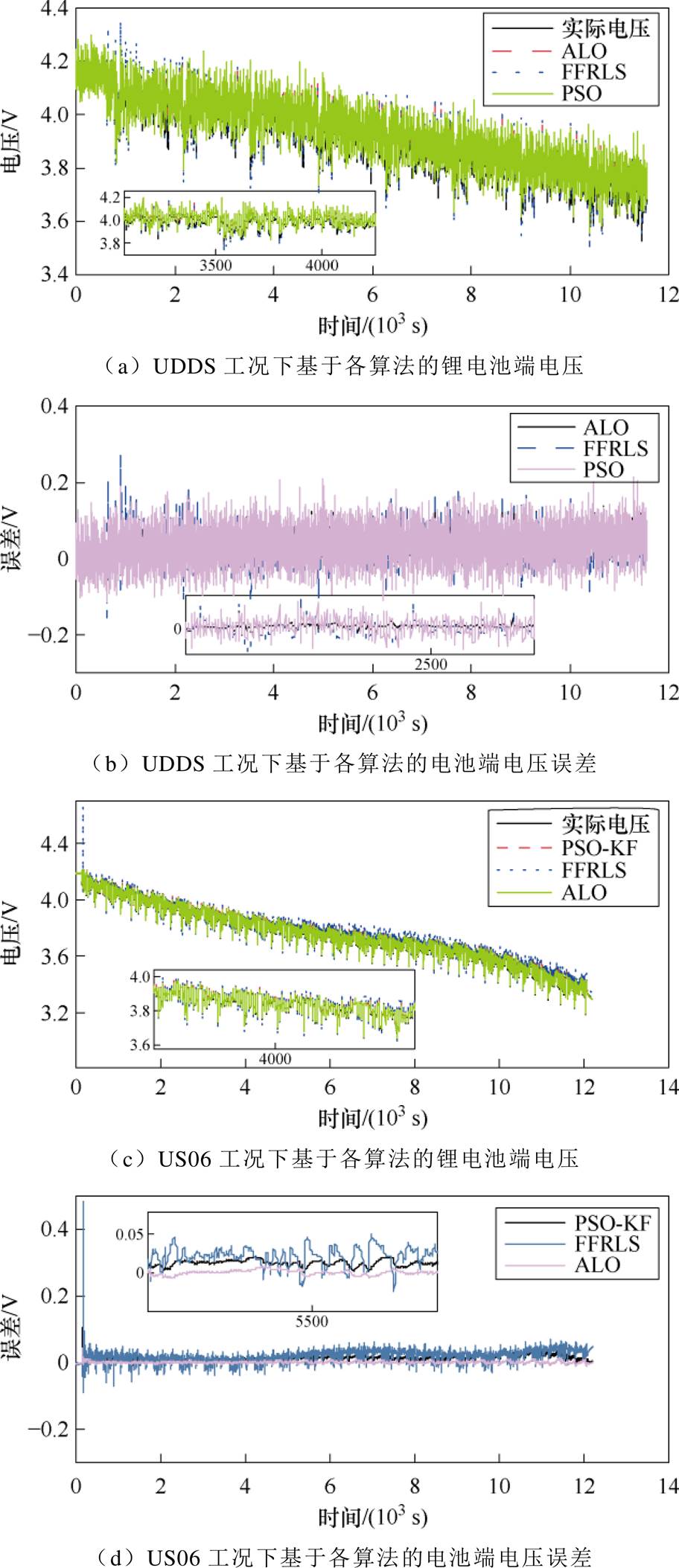
图13 UDDS和US06工况下不同算法下端电压
Fig.13 Terminal voltages based on various algorithms under UDDS and US06
表5 UDDS和US06工况下端电压误差
Tab.5 Terminal voltage error under UDDS and US06 (单位: mV)
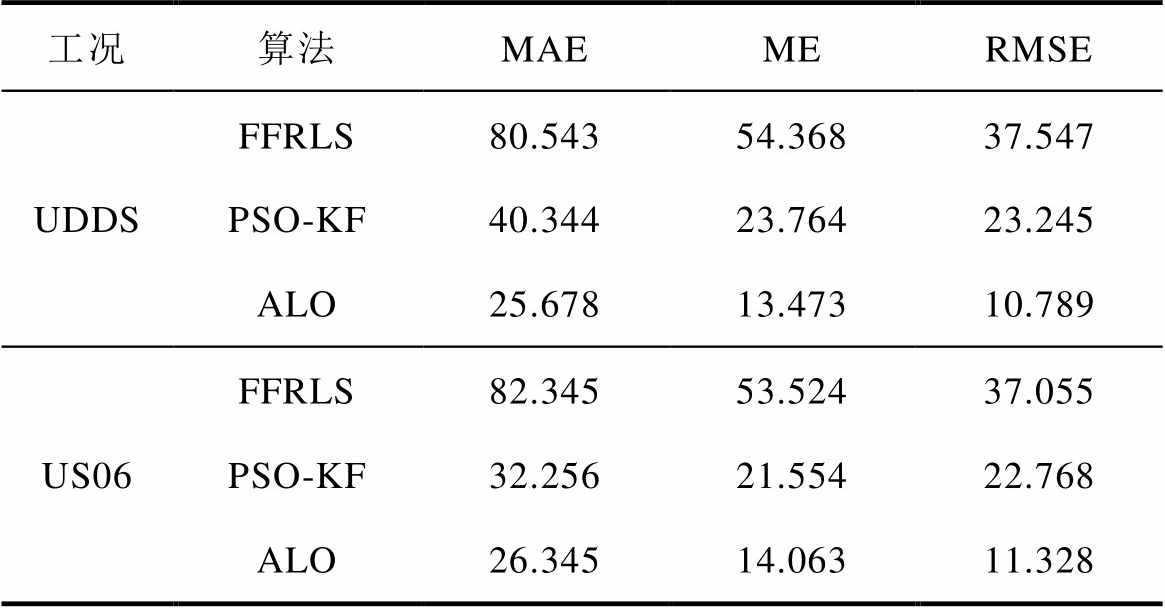
工况算法MAEMERMSE UDDSFFRLS80.54354.36837.547 PSO-KF40.34423.76423.245 ALO25.67813.47310.789 US06FFRLS82.34553.52437.055 PSO-KF32.25621.55422.768 ALO26.34514.06311.328
结果表明,在模拟城市道路典型工况和高负荷工况时,ALO算法能够精确跟踪实际端电压变化,有效捕捉锂枝晶生长引发的阻容参数波动,实现更优的全周期参数辨识效果。
锂枝晶生长导致内阻变化和容量衰减,对SOC估计精度产生影响。设计EKF、AEKF、STAEKF、AISTAEKF、长短期记忆网络(Long Short Term Memory, LSTM)和卷积神经网络(Convolutional Neural Networks, CNN)-LSTM联合模型(CNN- LSTM)[28]六种算法在不同温度、不同工况下的锂离子电池SOC估计对比方案,验证基于AISTAEKF的SOC估计方法的有效性。其中,CNN-LSTM采用1D卷积与LSTM混合架构。卷积层含32个1D卷积核(核大小为3),用于提取电压、电流序列的局部特征,池化层采用最大池化(步长为2),卷积层激活函数为LeakyReLU;LSTM模型架构采用2层双向LSTM网络,输入层为当前时刻及前5个时刻的电压、电流、温度特征,共18维。第一层LSTM含64个隐藏单元,第二层含32个隐藏单元,输出层为1维即SOC估计值,激活函数采用ReLU,输出层无激活函数。
分别采用0℃、25℃、45℃的HPPC工况以及不同老化程度下的DST、UDDS和US06工况的充放电数据,按7 3划分训练集与验证集。优化器为Adam,初始学习率为0.001(即每20个epoch衰减10%),batch size为32,训练epoch为200;采用早停策略(即验证集损失5个epoch无下降则终止);损失函数设计为方均误差(MSE)。
3划分训练集与验证集。优化器为Adam,初始学习率为0.001(即每20个epoch衰减10%),batch size为32,训练epoch为200;采用早停策略(即验证集损失5个epoch无下降则终止);损失函数设计为方均误差(MSE)。
5.3.1 基于方案一的三种温度梯度HPPC工况SOC估计
为验证不同温度下SOC估计方法的普适性,对比分析三种温度下基于LSTM、CNN-LSTM、STEKF、AISTAEKF四种算法的SOC估计与误差、收敛时间分别如图14、表6和表7所示。表中,MAX为最大误差。
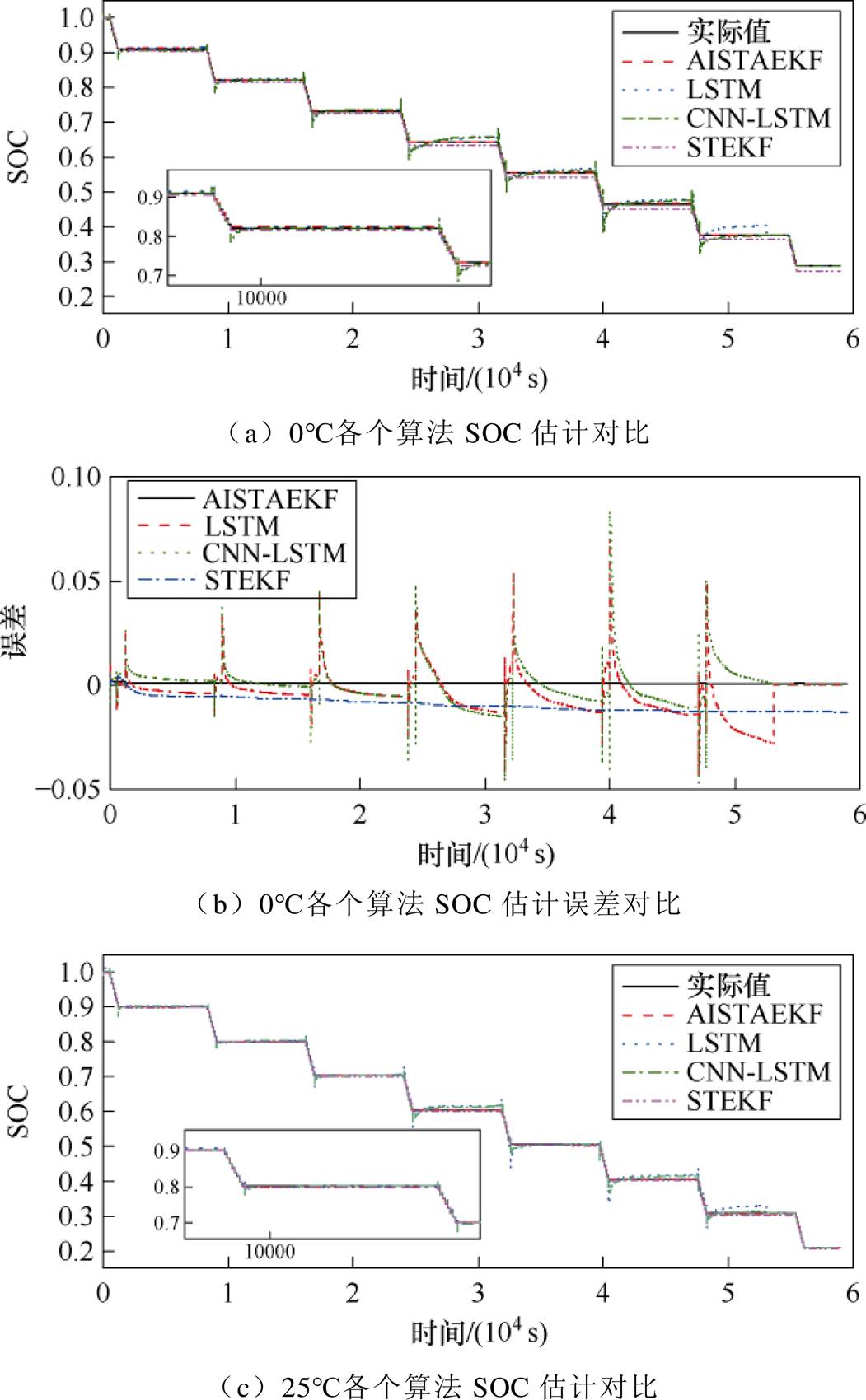
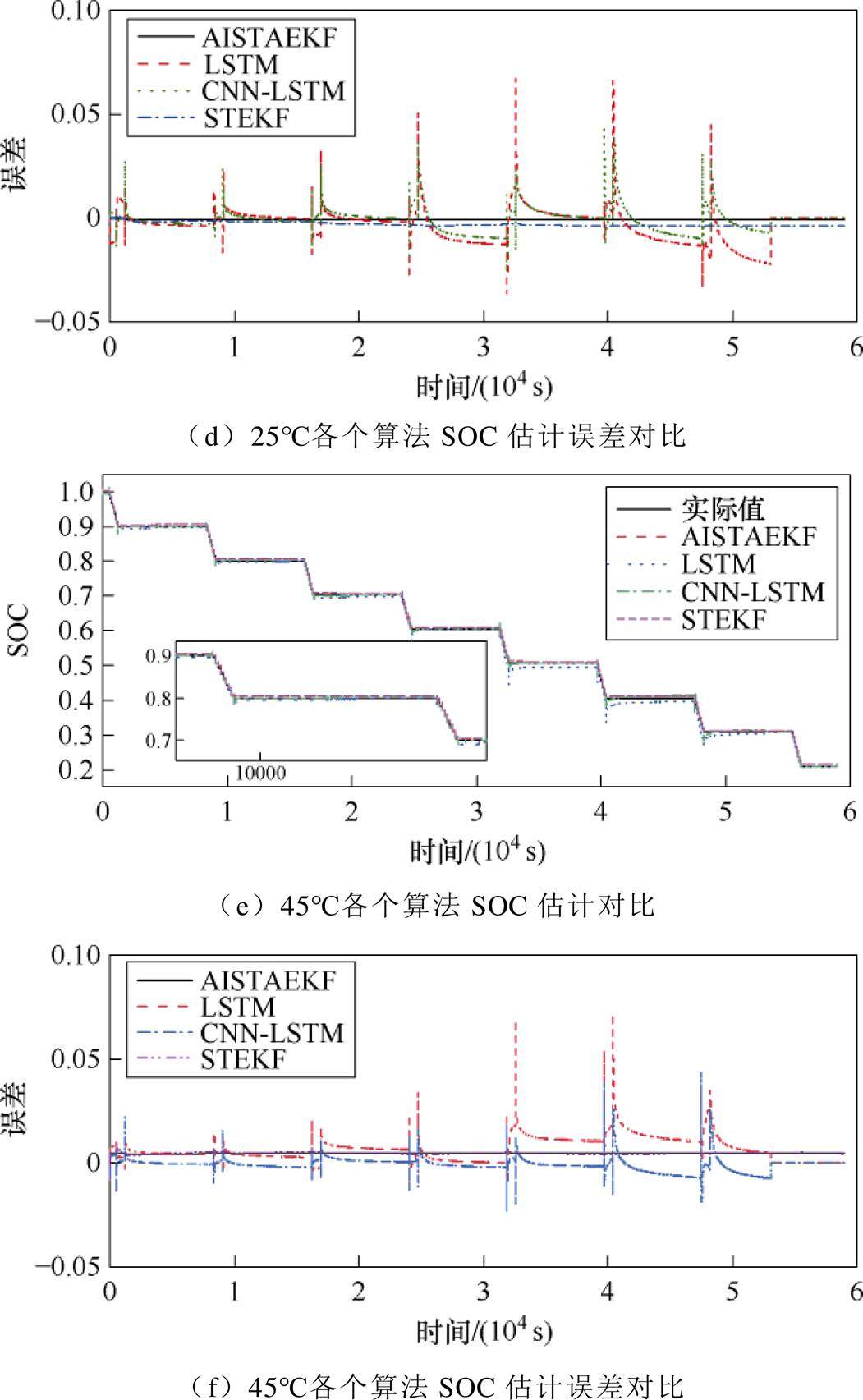
图14 不同温度HPPC工况下SOC估计
Fig.14 SOC estimation at different temperatures under HPPC
表6 不同温度HPPC工况下SOC估计误差
Tab.6 SOC estimation error at different temperatures under HPPC
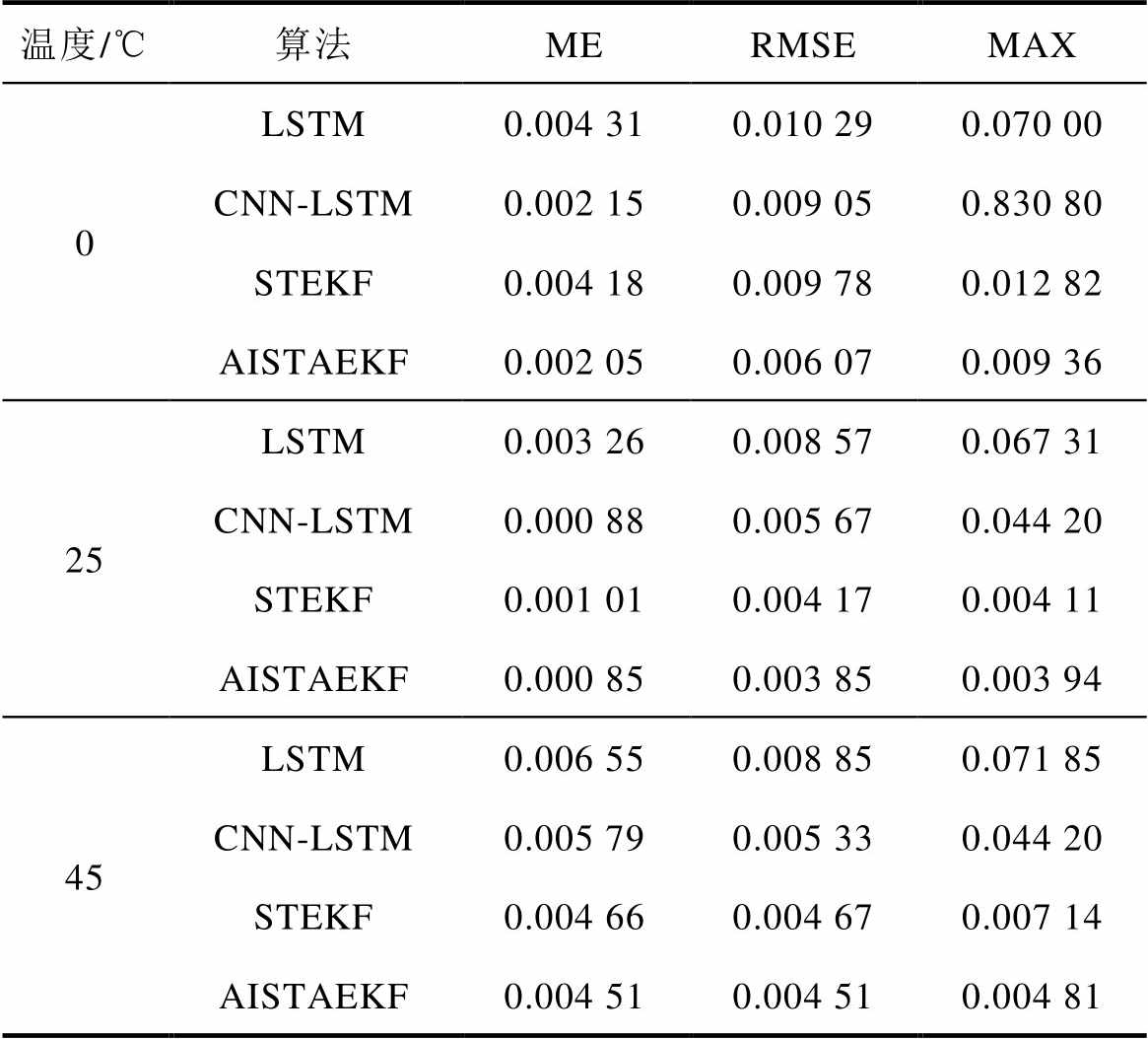
温度/℃算法MERMSEMAX 0LSTM0.004 310.010 290.070 00 CNN-LSTM0.002 150.009 050.830 80 STEKF0.004 180.009 780.012 82 AISTAEKF0.002 050.006 070.009 36 25LSTM0.003 260.008 570.067 31 CNN-LSTM0.000 880.005 670.044 20 STEKF0.001 010.004 170.004 11 AISTAEKF0.000 850.003 850.003 94 45LSTM0.006 550.008 850.071 85 CNN-LSTM0.005 790.005 330.044 20 STEKF0.004 660.004 670.007 14 AISTAEKF0.004 510.004 510.004 81
由图14、表6、表7可见,不同温度HPPC工况下的SOC估计对比分析结果如下:
(1)①0℃、25℃和45℃的HPPC工况测试中,LSTM和CNN-LSTM算法在40 000 s脉冲电流突变时刻均出现较大估计误差;②0℃时,STEKF算法通过渐消因子动态调整滤波增益,能够有效跟踪脉冲电流干扰下SOC突变特征,但在连续脉冲充放电交替过程中存在误差累积现象,导致平均误差和方均根误差相对较高;③25℃时,STEKF算法SOC估计平均误差、方均根误差、最大误差分别为0.001 01、0.004 17、0.004 11,均低于0℃工况,且误差波动范围缩小;④45℃高温下,由于STEKF算法的固定渐消因子难以适应快速变化的噪声协方差,导致平均误差较25℃有所上升,表现出温度依赖性的误差累积效应。
表7 不同温度HPPC工况下各算法收敛时间
Tab.7 Convergence time of various algorithms at different temperatures under HPPC
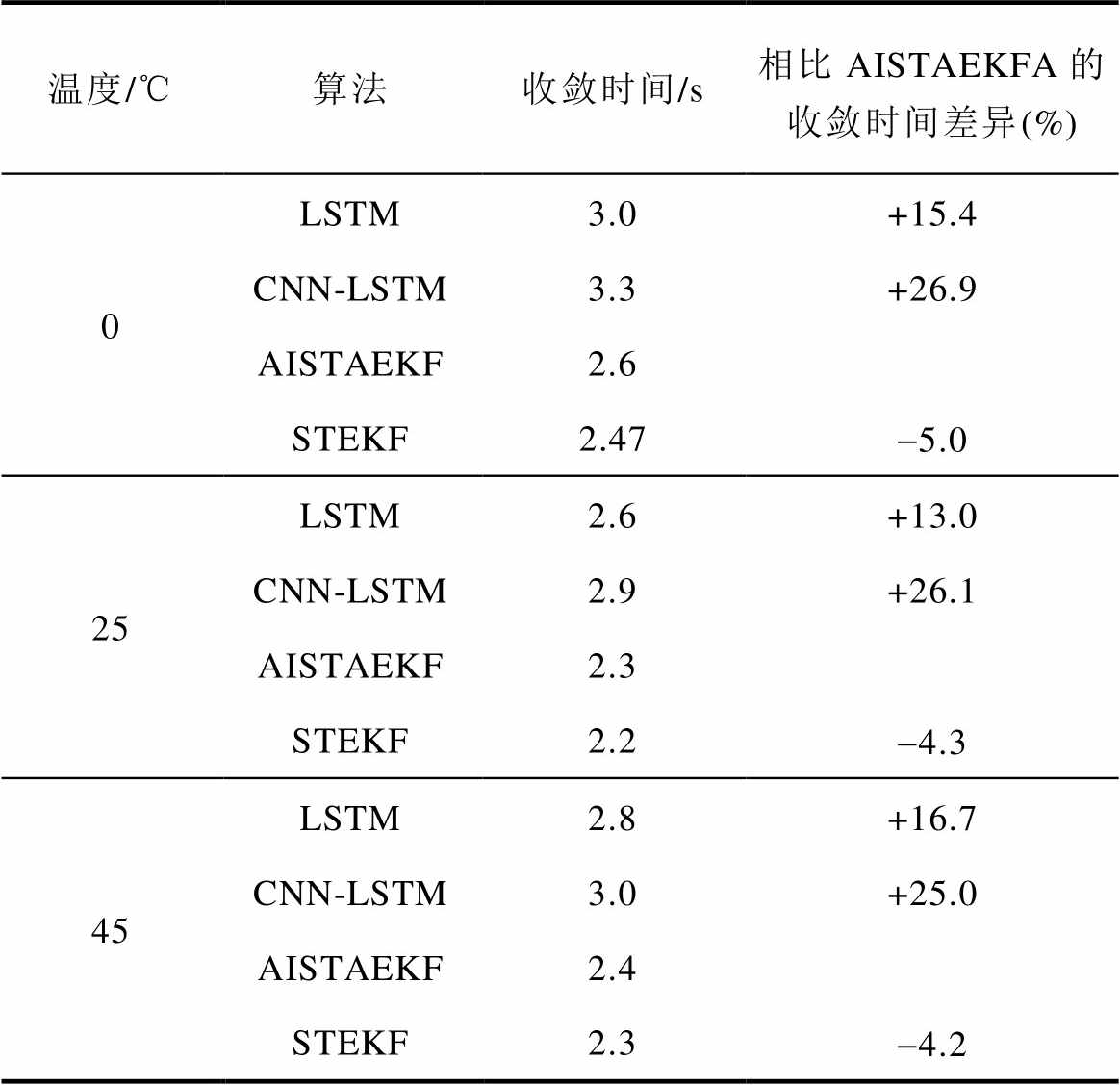
温度/℃算法收敛时间/s相比AISTAEKFA的收敛时间差异(%) 0LSTM3.0+15.4 CNN-LSTM3.3+26.9 AISTAEKF2.6 STEKF2.47-5.0 25LSTM2.6+13.0 CNN-LSTM2.9+26.1 AISTAEKF2.3 STEKF2.2-4.3 45LSTM2.8+16.7 CNN-LSTM3.0+25.0 AISTAEKF2.4 STEKF2.3-4.2
(2)0℃、25℃和45℃测试条件下,相比STEKF,AISTAEKF算法的SOC估计精度提升,ME分别下降50.96%、15.84%、3.22%,RMSE分别下降37.93%、7.67%、3.43%。原因为:采用自适应插值策略,在单个脉冲期间还是连续脉冲序列中,包括极化效应显著的高电流脉冲区间及电流方向切换时,智能增加电压电流伪测量点,精确拟合锂枝晶导致的阻容参数阶跃变化特性,有效修正状态转移函数与测量函数的线性化误差及噪声估计偏差。
(3)稳态下,相比于STEKF,基于AISTAEK的SOC估计收敛时间增加约5%,原因为:电池参数稳定时,STEKF引入强跟踪算法,仅通过渐消因子调整误差协方差矩阵;AISTAEKF算法引入自适应插值和噪声自适应机制,因此增加额外的伪测量值生成与噪声协方差动态调整计算。相比于深度学习模型LSTM和CNN-LSTM依赖大量历史数据训练和复杂网络迭代,AISTAEKF算法仅进行一次计算,过程相对简洁,保持较短收敛时间,缩短约为10%以上。
测试结果表明,AISTAEKF算法在宽温域范围(0℃~45℃)内均能将SOC估计误差稳定控制在较小范围内。
5.3.2 基于方案二的三种动态工况的SOC估计
1)DST工况下
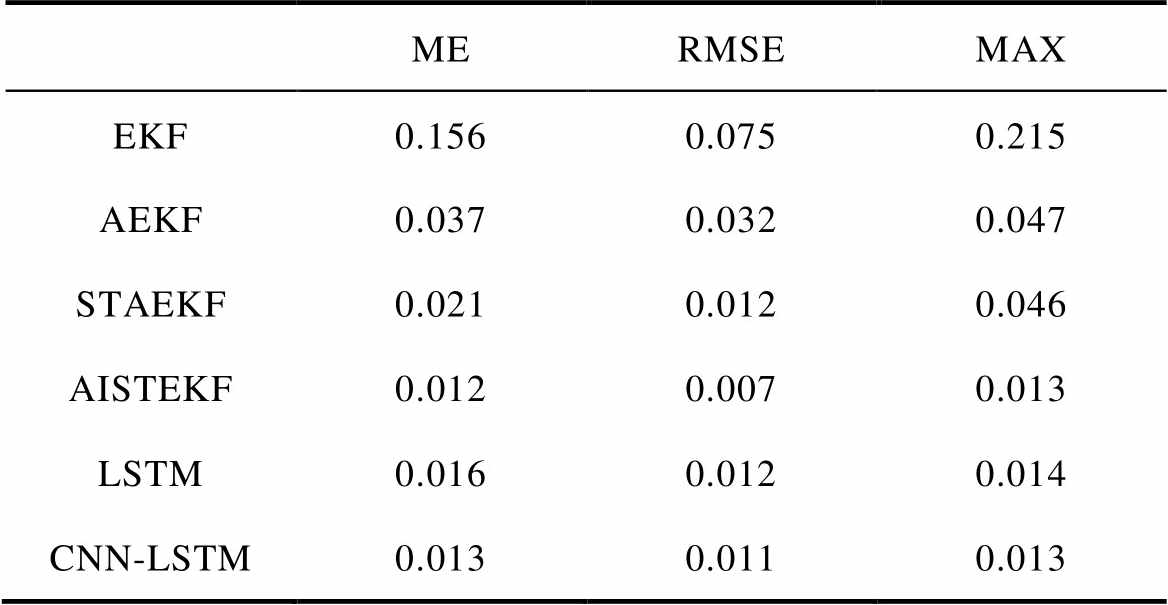
锂电池循环充放电100次时,设置不同幅度和持续时间的充放电DST工况,基于六种不同算法的SOC估计对比及误差如图15和表8所示。
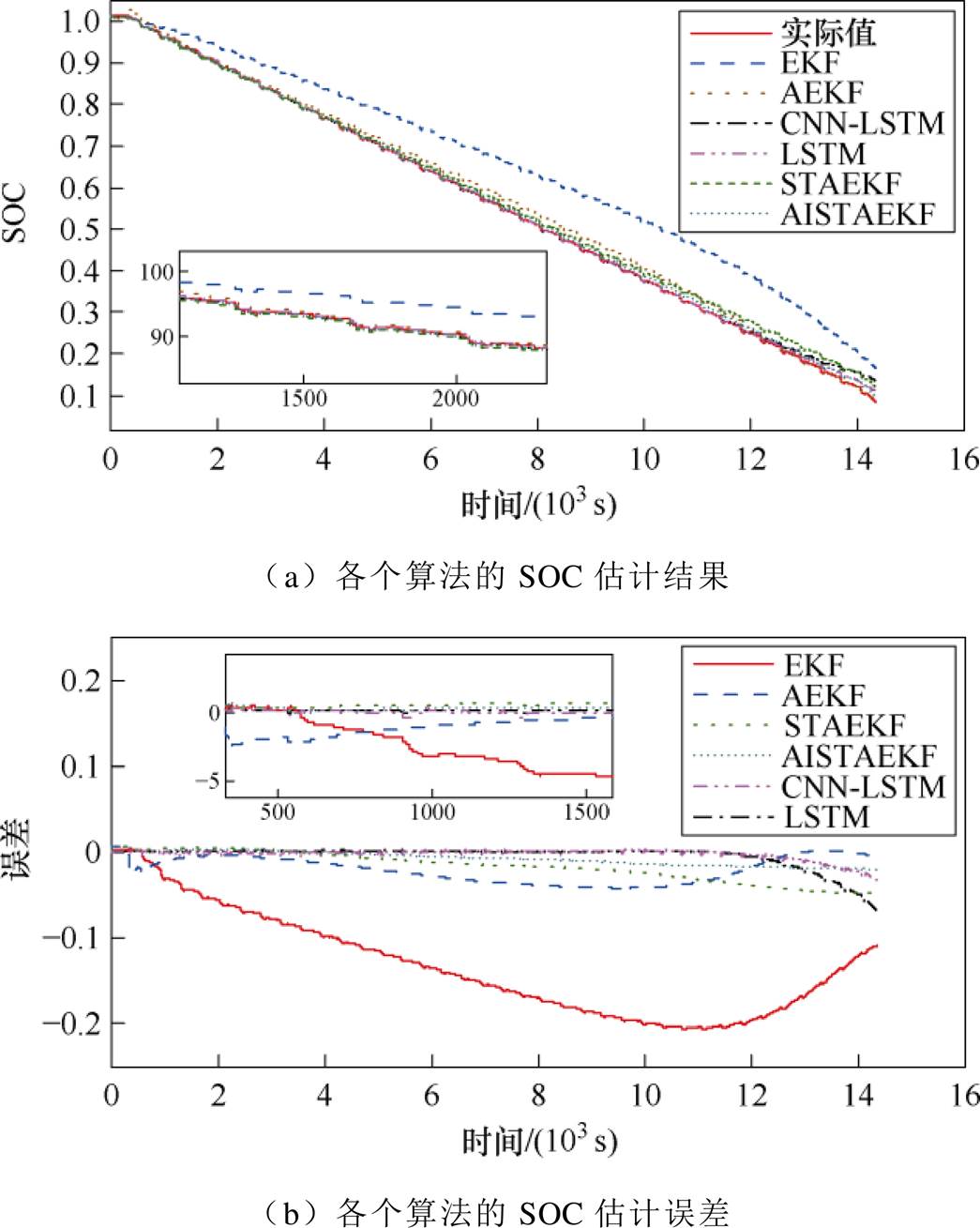
图15 DST工况下基于各算法的SOC估计
Fig.15 SOC estimation based on various algorithms under DST
表8 DST工况下各算法的SOC估计误差
Tab.8 SOC estimation error of various algorithms under DST
MERMSEMAX EKF0.1560.0750.215 AEKF0.0370.0320.047 STAEKF0.0210.0120.046 AISTEKF0.0120.0070.013 LSTM0.0160.0120.014 CNN-LSTM0.0130.0110.013
由图15和表8可见,DST工况下各算法SOC估计对比分析为:
(1)DST工况下,EKF算法由于对模型精度和噪声统计特性的高度依赖,加之其线性化处理的固有局限,在充放电状态切换瞬间表现出SOC估计滞后现象,平均误差、方均根误差和最大误差分别达0.156、0.075、0.215。
(2)AEKF算法虽能够自适应调整噪声协方差,并将平均误差、方均根误差和最大误差分别降低至0.037、0.032、0.047,但在处理电池高度非线性特性时,尤其是在长时间小电流放电和大电流充电等复杂工况下,其SOC估计仍然难以快速跟踪真实值的变化。
(3)STAEKF算法通过引入渐消因子修正误差协方差矩阵,在高SOC区间因锂电池线性度较高而表现出较好的跟踪效果。然而,在中低SOC区间,受锂枝晶生长以及充放电速率频繁切换的影响,极化内阻和极化电容导致的极化电压会呈现随电流方向变化的滞后响应,从而使残差协方差增大。由于渐消因子的调整依赖残差协方差矩阵的历史均值与当前值的偏差,这种滞后效应会导致误差不断累积,使得平均误差、方均根误差和最大误差分别达到约0.021、0.012和0.046。
(4)LSTM算法的SOC估计平均误差、方均根误差和最大误差分别为0.016、0.012和0.014,其优势在于能够进行历史数据时序特征学习,但由于缺乏对锂枝晶导致的内阻阶跃式增长以及极化参数动态变化的物理建模,在充放电倍率频繁切换的工况下,难以准确捕捉电池内部状态的突变特性,导致估计误差波动较大。
(5)CNN-LSTM算法利用卷积神经网络提取电压、电流特征,将SOC估计平均误差、方均根误差和最大误差分别优化至0.013、0.011和0.013,相比LSTM算法有所提升。然而,由于缺乏等效电路模型的物理机理支撑,该算法无法准确表征锂枝晶生长引起的浓差极化滞后效应,导致在中低SOC区间的估计误差呈现逐渐增大的趋势。
(6)ALO-AISTAEKF算法通过构建等效电路模型,在稳定充放电工况下采用积分策略提高精度,在剧烈工况下实时监测残差并动态调整滤波增益,将SOC估计的平均误差、方均根误差和最大误差分别优化至0.012、0.007和0.013。相比STAEKF算法和LSTM算法,分别下降了42.86%、41.67%、71.74%和25%、41.67%、7.14%;对比CNN-LSTM算法,平均误差和方均根误差分别减少7.69%和36.36%。
综上所述,通过AISTAEKF对SOC估计模型权重进行动态调整,可实现历史数据与当前测量数据依赖程度的优化分配;同时借助渐消因子持续修正状态估计误差协方差矩阵,可提升系统对突变状态的跟踪能力,从而有效抑制误差的产生和累积。
2)UDDS和US06工况
锂电池分别在老化循环第100和200次时,设计多种不同幅度和持续时间的充放电UDDS和US06工况。基于六种不同算法的SOC估计及误差如图16和表9所示。
由图16和表9可见,UDDS和US06工况下的SOC估计对比分析为:
(1)在频繁启停的UDDS工况和高负荷电流波动的US06工况下,传统滤波算法EKF和AEKF受限于线性化模型固有缺陷,SOC估计误差显著:EKF的最大误差(MAX)分别高达0.091 14和0.076 19;而AEKF虽能够通过自适应调整噪声协方差一定程度上改善精度,但平均误差(ME)仍分别达到0.032 24和0.015 84,显示复杂动态工况下的适应性局限。

图16 UDDS和US06工况下基于各算法的SOC估计
Fig.16 SOC estimation based on various algorithms under UDDS and US06
表9 UDDS和US06工况下的SOC估计误差
Tab.9 SOC estimation error under UDDS and US06
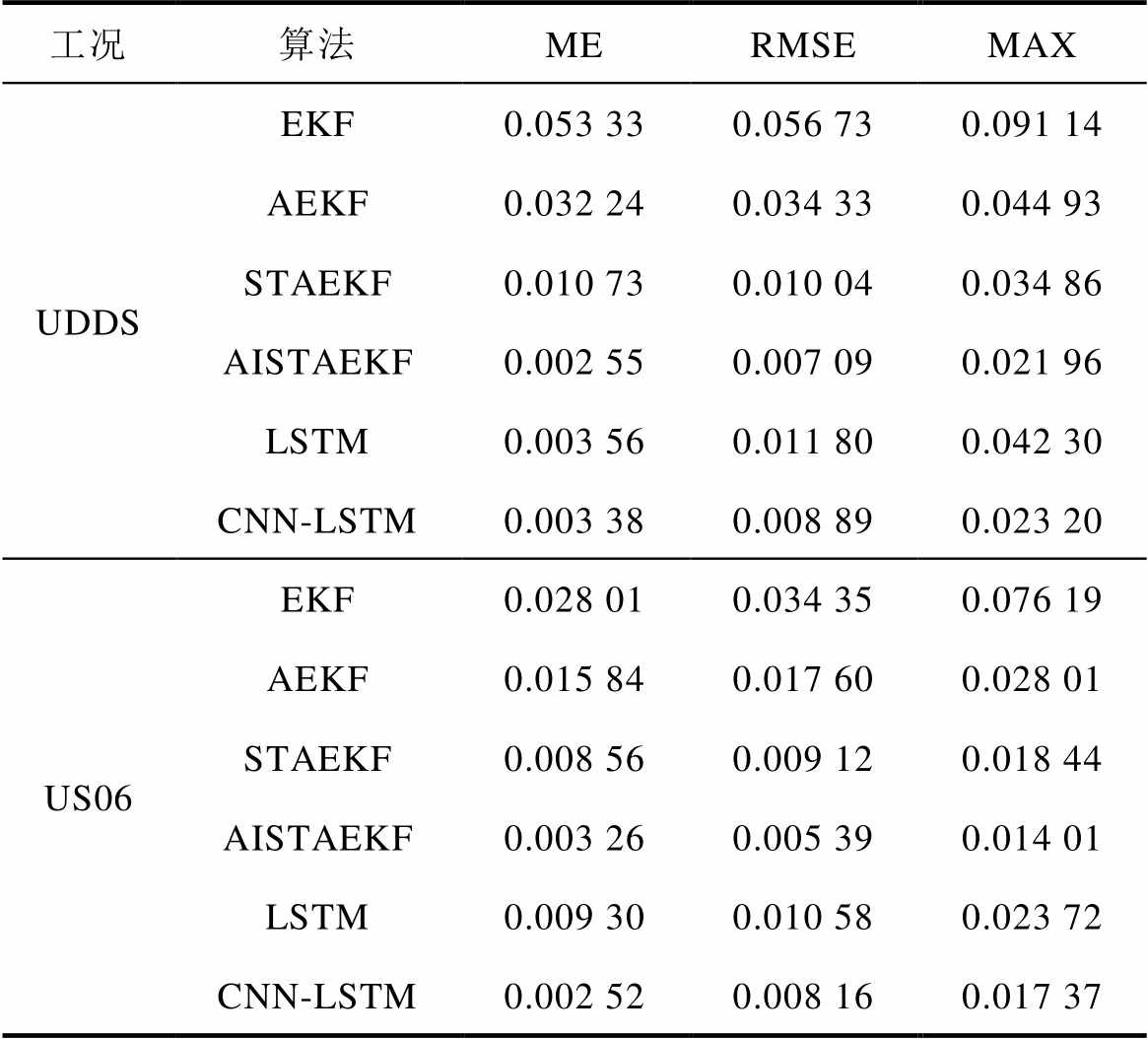
工况算法MERMSEMAX UDDSEKF0.053 330.056 730.091 14 AEKF0.032 240.034 330.044 93 STAEKF0.010 730.010 040.034 86 AISTAEKF0.002 550.007 090.021 96 LSTM0.003 560.011 800.042 30 CNN-LSTM0.003 380.008 890.023 20 US06EKF0.028 010.034 350.076 19 AEKF0.015 840.017 600.028 01 STAEKF0.008 560.009 120.018 44 AISTAEKF0.003 260.005 390.014 01 LSTM0.009 300.010 580.023 72 CNN-LSTM0.002 520.008 160.017 37
(2)STAEKF算法通过引入渐消因子使SOC估计误差得到一定改善,在UDDS和US06工况下平均误差ME分别降至0.010 73和0.008 56。然而,该算法的固定噪声协方差矩阵难以适应锂枝晶生长导致的电池参数时变特性,致使在中、低SOC区间的估计误差呈现明显的累积效应。
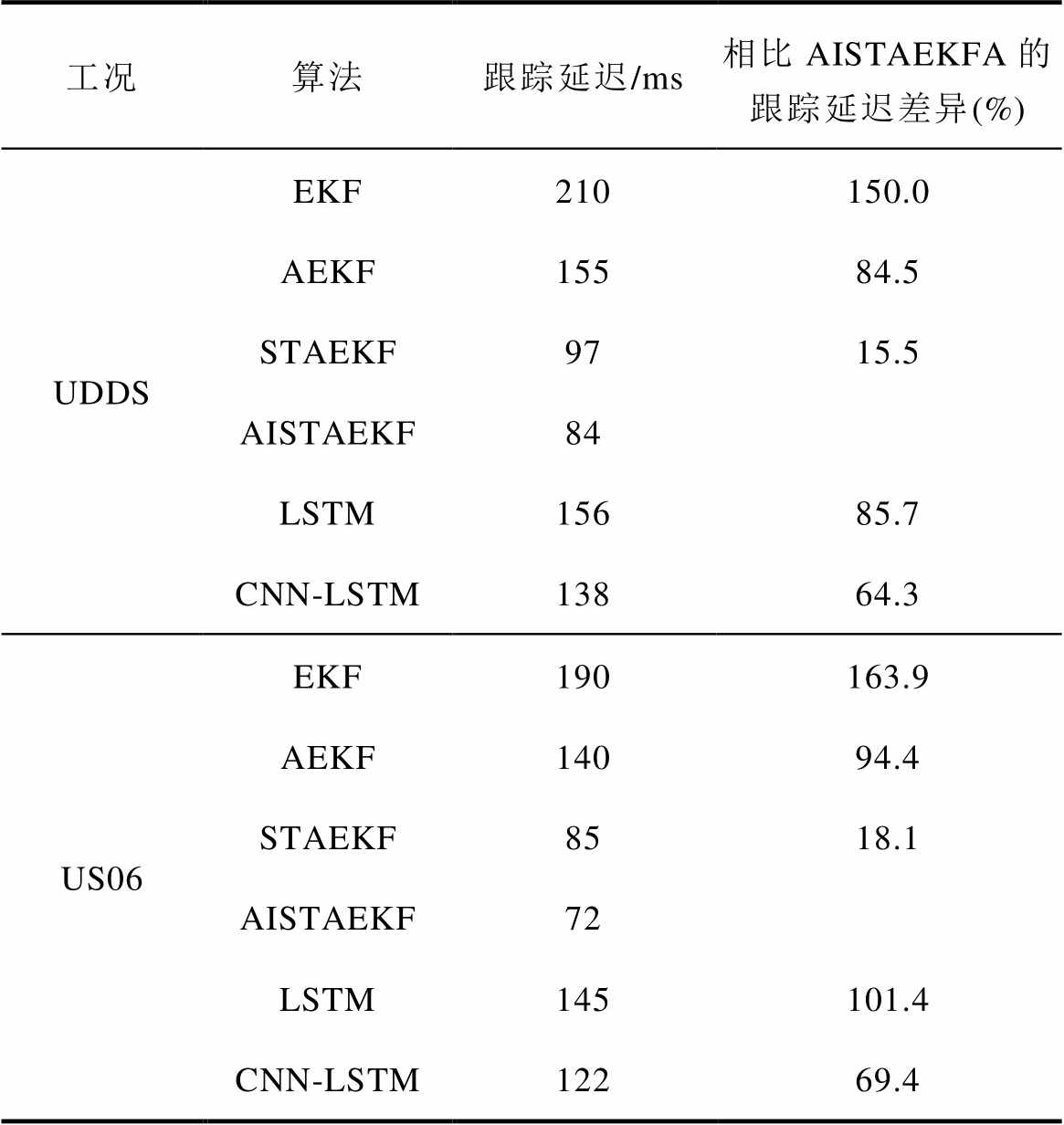
选取UDDS和US06工况中急加速和减速电流突变点,统计基于各算法SOC估计的跟踪延迟时间,即估计值与真实值之间的滞后时间,结果见表10。
(3)LSTM和CNN-LSTM依赖历史数据学习,UDDS工况下RMSE分别为0.011 80和0.008 89,US06工况下因电流大范围突变导致最大误差MAX分别达0.023 72和0.017 37,原因为:当数据集不充足时,缺乏物理建模难以捕捉极化滞后。若训练样本充足,可在一定程度提升自主学习电流突变与极化滞后的时间关联、温度对滞后程度的影响规律、以及老化状态下滞后特性漂移趋势等能力,实现SOC估计偏差减少,但训练与迭代过程复杂。
表10 UDDS和US06工况下各算法跟踪延时间
Tab.10 Tracking delay time of various algorithms under UDDS and US06
工况算法跟踪延迟/ms相比AISTAEKFA的跟踪延迟差异(%) UDDSEKF210150.0 AEKF15584.5 STAEKF9715.5 AISTAEKF84 LSTM15685.7 CNN-LSTM13864.3 US06EKF190163.9 AEKF14094.4 STAEKF8518.1 AISTAEKF72 LSTM145101.4 CNN-LSTM12269.4
(4)AISTAEKF算法通过线性伪插值补充伪测量值,补偿电压对电流方向变化的滞后响应,在UDDS和US06工况下将ME分别控制在0.002 55和0.003 26,较STAEKF算法降低76.23%和61.92%;同时方均根误差RMSE也分别下降了29.38%和40.90%。
(5)UDDS和US06工况下,AISTAEKF算法跟踪延迟特性好,分别为84 ms和72 ms,较EKF分别缩短126 ms和118 ms,降低60%、62.1%;较STAEKF分别缩短13 ms和13 ms,降低13.4%、15.3%。原因为:电流突变时,AISTAEKF算法的自适应插值因子为r=5,可补充伪测量值,并结合强跟踪渐消因子,可快速修正因锂枝晶极化滞后导致的误差;此外,噪声自适应机制动态调整Qk和Rk,可减少锂枝晶引发的测量噪声干扰,使SOC估计值更快跟随真实SOC变化。而EKF、STAEKF缺乏突变等动态调整机制,响应滞后明显;深度学习模型受限于历史数据依赖,实时性表现较差。
综上所述,基于AISTAEKF算法的SOC估计方法,虽然计算复杂度稍高于STAEKF算法,但复杂工况下SOC估计误差相比STAEKF算法降低30%以上,且最大误差相比传统EKF降低90%以上,同时SOC估计跟踪延迟时间缩短10%以上,有效跟踪锂枝晶引起的内阻波动与容量变化,实现动态补偿并提高SOC估计的跟踪速度,验证了AISTAEKF算法在不同老化程度以及宽范围工况下具有良好的估计特性,满足电动汽车BMS允许ms级延迟的实时性要求。
考虑锂离子电池因锂枝晶生长引发的内阻及极化电容波动问题,本文提出基于蚁狮算法(ALO)与自适应插值改进强跟踪扩展卡尔曼滤波(AISTAEKF)的SOC联合估计方法,并进行验证。
1)提出基于ALO算法和三段式Huber损失函数的二阶等效电路模型分段时变参数辨识方法,以映射不同SOC区间内阻和极化状态的差异性变化。
2)构建基于自适应插值改进强跟踪扩展卡尔曼滤波(AISTAEKF)的SOC估计方法。引入表征锂电池状态方程和量测方程得非线性指标和插值因子,有效补偿电压滞后电流效应导致的线性化预测误差。采用渐消因子修正SOC估计误差协方差矩阵,增强对SOC容量突变的跟踪能力,同时提高SOC估计的跟踪速度;设计噪声自适应机制,动态调节过程与测量噪声协方差,克服固定噪声参数在复杂工况下适应性不足问题。
3)搭建锂电池性能测试实验平台,开发0℃、25℃、45℃温度梯度HPPC工况与DST、UDDS和US06工况下基于多类型算法的等效模型参数辨识方法与SOC估计方法验证实验方案,结果表明:不同温度梯度和不同复杂工况下,基于FFRLS、PSO-KF和ALO三种算法的等效电路模型参数辨识精度对比分析,验证了ALO算法在参数辨识中能有效捕捉锂枝晶生长导致的端电压、阻容参数变化。基于EKF、AEKF、STAEKF、AISTAEKF、LSTM和CNN-LSTM六种算法的SOC估计对比分析,验证了AISTAEKF算法在宽温域范围内(0~45℃)、宽工况下均具有良好的SOC估计精度。
参考文献
[1] Yan Gangui, Liu Dongyuan, Li Junhui, et al. A cost accounting method of the Li-ion battery energy storage system for frequency regulation considering the effect of life degradation[J]. Protection and Control of Modern Power Systems, 2018, 3(1): 1-9.
[2] 宫明辉, 乌江, 焦朝勇. 基于模糊自适应扩展卡尔曼滤波器的锂电池SOC估算方法[J]. 电工技术学报, 2020, 35(18): 3972-3978.
Gong Minghui, Wu Jiang, Jiao Chaoyong. SOC estimation method of lithium battery based on fuzzy adaptive extended Kalman filter[J]. Transactions of China Electrotechnical Society, 2020, 35(18): 3972- 3978.
[3] 赵珈卉, 田立亭, 程林. 锂离子电池状态估计与剩余寿命预测方法综述[J]. 发电技术, 2023, 44(1): 1-17.
Zhao Jiahui, Tian Liting, Cheng Lin. Review on state estimation and remaining useful life prediction methods for lithium-ion battery[J]. Power Generation Technology, 2023, 44(1): 1-17.
[4] 王辉, 严欢, 张晓滨, 等. 基于分数阶的锂电池SOC和SOH联合在线估计[J]. 电源学报, 2025, 23(2): 256-265.
Wang Hui, Yan Huan, Zhang Xiaobin, et al. Joint online estimation of SOC and SOH for lithium batteries based on fractional-order models[J]. Journal of Power Supply, 2025, 23(2): 256-265.
[5] Luo Jiayi, Peng Jiankun, He Hongwen. Lithium-ion battery SOC estimation study based on Cubature Kalman filter[J]. Energy Procedia, 2019, 158: 3421- 3426.
[6] 郭向伟, 邢程, 司阳, 等. RLS锂电池全工况自适应等效电路模型[J]. 电工技术学报, 2022, 37(16): 4029-4037.
Guo Xiangwei, Xing Cheng, Si Yang, et al. RLS adaptive equivalent circuit model of lithium battery under full working condition[J]. Transactions of China Electrotechnical Society, 2022, 37(16): 4029- 4037.
[7] 范兴明, 封浩, 张鑫. 最小二乘算法优化及其在锂离子电池参数辨识中的应用[J]. 电工技术学报, 2024, 39(5): 1577-1588.
Fan Xingming, Feng Hao, Zhang Xin. Optimization of least squares method and its application in parameter identification of lithium-ion battery model[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(5): 1577-1588.
[8] 何晋, 马睿飞, 蔡琦琳, 等. 基于递推最小二乘法的锂电池内短路全寿命周期辨识[J]. 机械工程学报, 2022, 58(17): 96-104.
He Jin, Ma Ruifei, Cai Qilin, et al. Life cycle identification of internal short circuits of lithium-ion battery based on recursive least square method[J]. Journal of Mechanical Engineering, 2022, 58(17): 96-104.
[9] 巫春玲, 付俊成, 徐先峰, 等. 基于多新息最小二乘和多新息扩展卡尔曼滤波算法的锂电池SOC估计[J]. 华南理工大学学报(自然科学版), 2024, 52(2): 74-83.
Wu Chunling, Fu Juncheng, Xu Xianfeng, et al. Lithium battery SOC estimation based on multi innovation least square and multi innovation extended Kalman filter algorithm[J]. Journal of South China University of Technology (Natural Science Edition), 2024, 52(2): 74-83.
[10] 庞辉, 郭龙, 武龙星, 等. 考虑环境温度影响的锂离子电池改进双极化模型及其荷电状态估算[J]. 电工技术学报, 2021, 36(10): 2178-2189.
Pang Hui, Guo Long, Wu Longxing, et al. An improved dual polarization model of Li-ion battery and its state of charge estimation considering ambient temperature[J]. Transactions of China Electrotechnical Society, 2021,36(10): 2178-2189.
[11] 董磊, 赖纪东, 苏建徽, 等. 基于IMAFFRLS-EKF的锂电池在线参数辨识和SOC估计方法[J]. 太阳能学报, 2024,45(6): 66-74.
Dong Lei, Lai Jidong, Su Jianhui, et al. Online parameter identification and soc estimation of lithium battery based on IMAFFRLS-EKF[J]. Acta Energiae Solaris Sinica, 2024,45(6): 66-74.
[12] 宋海飞, 王乐红, 原义栋, 等. 基于改进自适应卡尔曼滤波算法的锂离子电池荷电状态估计[J]. 电力系统保护与控制, 2024,52(20): 72-82.
Song Haifei, Wang Lehong, Yuan Yidong, et al. State of charge estimation of lithium-ion batteries based on improved adaptive Kalman filter algorithm[J]. Power System Protection and Control, 2024,52(20): 72- 82.
[13] 贠祥, 张鑫, 王超, 等. 基于联合参数辨识的粒子群优化扩展粒子滤波的锂电池荷电状态估计[J]. 电工技术学报, 2024, 39(2): 595-606.
Yun Xiang, Zhang Xin, Wang Chao, et al. State of charge estimation of Li-ion battery using particle swarm optimization extended Kalman particle filter based on joint parameter identification[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(2): 595-606.
[14] 邹国发, 高祥, 王春. 考虑锂电池多时间尺度效应的参数辨识与SOC估计方法[J]. 电力系统保护与控制, 2024, 52(21): 71-80.
Zou Guofa, Gao Xiang, Wang Chun. Parameter identification and SOC estimation methods con- sidering multi-timescale effect lithium batteries[J]. Power System Protection and Control, 2024, 52(21): 71-80.
[15] 刘旖琦, 雷万钧, 刘茜, 等. 基于双自适应扩展粒子滤波器的锂离子电池状态联合估计[J]. 电工技术学报, 2024, 39(2): 607-616.
Liu Yiqi, Lei Wanjun, Liu Qian, et al. Joint state estimation of lithium-ion battery based on dual adaptive extended particle filter[J]. Transactions of China Electrotechnical Society, 2024, 39(2): 607- 616.
[16] 周娟, 林加顺, 吴乃豪, 等. 一种联合PID控制与扩展卡尔曼滤波的磷酸铁锂电池荷电状态估算方法[J]. 电网技术, 2023, 47(4): 1623-1632.
Zhou Juan, Lin Jiashun, Wu Naihao, et al. State of charge estimation for LiFeO4 battery combining PID control and extended Kalman filter[J]. Power System Technology, 2023, 47(4): 1623-1632.
[17] Park H E, Hong C H, Yoon W Y. The effect of internal resistance on dendritic growth on lithium metal electrodes in the lithium secondary batteries[J]. Journal of Power Sources, 2008, 178(2): 765-768.
[18] Sawaki Y, Shiba T, Kishimi M, et al. In- operandocross-sectional observation of graphite anode with deposited lithium and measurement of internal cell resistance[J]. Electrochemistry, 2016, 84(9): 695-698.
[19] Ren Zhong, Du Changqing, Wu Zhongyi, et al. A comparative study of the influence of different open circuit voltage tests on model-based state of charge estimation for lithium-ion batteries[J]. International Journal of Energy Research, 2021, 45(9): 13692- 13711.
[20] Xiong Rui, Yu Quanqing, Wang Leyi, et al. A novel method to obtain the open circuit voltage for the state of charge of lithium ion batteries in electric vehicles by using H infinity filter[J]. Applied Energy, 2017, 207: 346-353.
[21] 李东洋, 吕明泽, 郭艳蓉, 等. ALO优化下1DCNN- BiLSTM-Attention锂电池SOH预测[J]. 电工技术, 2023(4): 33-40.
Li Dongyang, Lü Mingze, Guo Yanrong, et al. SOH prediction of 1DCNN-BiLSTM-attention lithium battery under ALO optimization[J]. Electric Engin- eering, 2023(4): 33-40.
[22] Jiang Haifeng. Research on SOC estimation of residual power of lithium-ion batteries for electric vehicles based on extended Kalman filtering algorithm[J]. Applied Mathematics and Nonlinear Sciences, 2023, 8(1): 2849-2860.
[23] 艾蔓桐, 孙永辉, 王义, 等. 基于插值H∞扩展卡尔曼滤波的发电机动态状态估计[J]. 中国电机工程学报, 2018,38(19): 5846-5853, 5942.
Ai Mantong, Sun Yonghui, Wang Yi, et al. Dynamic state estimation for synchronous machines based on interpolation H∞ extended Kalman filter[J]. Pro- ceedings of the CSEE, 2018,38(19): 5846-5853, 5942.
[24] Akhlaghi S, Zhou Ning, Huang Zhenyu. A multi-step adaptive interpolation approach to mitigating the impact of nonlinearity on dynamic state estimation[J]. IEEE Transactions on Smart Grid, 2018, 9(4): 3102- 3111.
[25] 周东华, 席裕庚, 张钟俊. 非线性系统带次优渐消因子的扩展卡尔曼滤波[J]. 控制与决策, 1990, 5(5): 1-6.
Zhou Donghua,Xi Yugeng Zhang Zhongjun. Suboptimal fading extended Kalman filtering for nonlinear systems[J]. Control and Decision, 1990, 5(5): 1-6.
[26] Akhlaghi S, Zhou Ning, Huang Zhenyu. Adaptive adjustment of noise covariance in Kalman filter for dynamic state estimation[C]//2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 2017: 1-5.
[27] Liu Jianguo, ChenXiyuan. Adaptive Kalman filter based on multiple fading factors for fast in-motion initial alignment with rotation modulation tech- nique[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2022, 236(15): 3281-3292.
[28] 范志远, 杜江. 基于相关变分模态分解和CNN- LSTM的变压器油中溶解气体体积分数预测[J]. 高电压技术, 2024, 50(1): 263-273.
Fan Zhiyuan, Du Jiang. Prediction of dissolved gas volume fraction in transformer oil based on correlation variational mode decomposition and CNN- LSTM[J]. High Voltage Engineering, 2024, 50(1): 263-273.
Abstract With lithium dendrite growth, the diaphragm may bepiercedforming a microshort circuit that increases the Ohmic internal resistance (R0). At the same time, lithium dendrite accumulation can exacerbate non-uniformity in the electrode surface reaction, leading to dynamic changes in the polarization resistance and polarization capacitance.However, without accounting for dynamic mutations caused by lithium dendrites, traditional identification methods based on fixed or slowly varying parameters degrade SOC estimation accuracy.Additionally, the distinct characteristics of lithium dendrites under varying charge and discharge rates affect the actual capacity change, thereby influencingthe accuracy of SOC estimation.
Method: A new strategy was proposed based on the ant lion optimization (ALO) algorithm and an adaptive interpolation improved strong tracking extended Kalman filter (AISTAEKF). First, the growth characteristics of lithium dendrites induced by the pulse-current concentration were analyzed, clarifying differences in lithium dendrite growth rates and their impacts on battery parameters across high, medium, and low SOC stages. Recognizing the distinction between internal resistance and polarization capacitance, the ALO algorithm was introduced to characterize the nonlinear relationship between the battery's terminal voltage and its resistance- capacitance parameters. The SOC three-stage Huber loss function was designed by setting thresholds d1, d2, and d3 to measure the deviation between the model-predicted terminal voltage and the estimated value. A global parameter identification method of the equivalent circuit model was obtained. Then, an adaptive interpolation algorithm based on capacity fluctuations was introduced, using nonlinear indices nz and nl to determine interpolation factors that perform linear pseudo-interpolation on the sampled parameters to compensate for dynamic response characteristics. A fading factor derived from a robust tracking algorithm was used to update the SOC error covariance matrix. The orthogonality of the estimation residual vector was ensured, and the tracking capability for SOC sudden changes was improved. Additionally, a noise-adaptive mechanism using forgetting factors a and b dynamically adjusts the noise covariances of the process and measurement parameters, thereby enhancing the algorithm's robustness. Hybrid power pulse characteristic (HPPC), dynamic stress test (DST), urban dynamometer driving schedule (UDDS), and the united states government’s light vehicle drive cycle (US06) experiments were designed to verify the effectiveness of the SOC estimation model.
Results: (1) Under different temperature gradients and complex conditions, the comparative analysis of the equivalent circuit model based on FFRLS, PSO-KF, and ALO algorithms verifies that the ALO algorithm can effectively capture the changes of terminal voltage and resistance capacitance parameters caused by lithium dendrite growth in parameter identification. Its root mean square error (RMSE) was reduced by 13.93%~53.59% relative to PSO-KF. (2) According to the SOC estimation of six algorithms, EKF, AEKF, STAEKF, AISTAEKF, LSTM, and CNN-LSTM, the AISTAEKF algorithm has good SOC estimation accuracy in a wide temperature range (0℃~45℃), different aging degrees, and a wide range of operating conditions. The maximum error (MAX) was within 0.936% under HPPC conditions, and the tracking delay was shortened to 84 ms under UDDS conditions.
keywords:Lithium-ion battery, lithium dendrite, state of charge (SOC) estimation, ant lion optimizer, adaptive interpolation, improved strong tracking extended Kalman filter
DOI: 10.19595/j.cnki.1000-6753.tces.250420
中图分类号:TM912
中央引导地方科技发展资金(216Z1011G)资助。
收稿日期 2025-03-13
改稿日期 2025-06-16
赵靖英 女,1974年生,教授,硕士生导师,研究方向为电工装备可靠性理论及应用、智能电网、无线传能。E-mail: zhaojy931@hebut.edu.cn(通信作者)
崔宇杰 男,2001年生,硕士研究生,研究方向为锂离子电池SOC估计与均衡策略。E-mail: 2979789538@qq.com
(编辑 郭丽军)