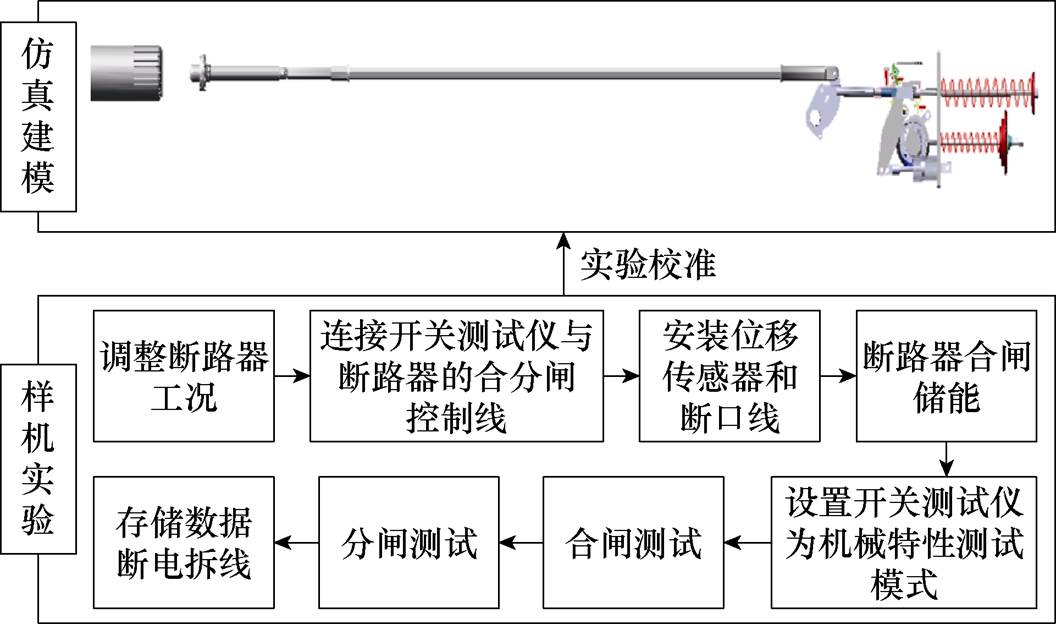
图1 LW30-252断路器的机械特性仿真模型及实验校准
Fig.1 Simulation model of mechanical characteristics and experimental calibration for the LW30-252 circuit breaker
摘要 高压断路器操动机构的机械状态是保障设备和电网安全稳定运行的重要因素,利用人工智能手段实现关键机械参数的精准辨识有利于高压断路器的机械故障诊断,是实现缺陷溯源的基础。该文提出了以一维卷积神经网络和多头注意力机制为基础的新型迁移网络,实现了操动机构合闸弹簧、分闸弹簧、缓冲器、拐臂轴孔磨损程度及机构卡涩状态的机械参数辨识。针对操动机构机械状态受多部件相互作用影响的特点,该迁移网络由共有特征学习网络和特有特征学习网络构成,分别提取机械特征与机械参数间的公共知识,以及与特定机械参数间的特有知识。此外,基于操动机构的动力学特性,构建融合物理信息的损失函数并引入样本加权策略,增强了机械参数间的物理一致性,提升了模型的机械参数辨识能力。测试结果表明,该文所提网络对于操动机构机械参数辨识的平均相对误差低于4%,能够为操动机构的故障诊断和关键部件的状态评价提供数据支撑。
关键词:高压断路器 弹簧操动机构 机械参数辨识 迁移学习 物理信息嵌入
以新能源为主体的新型电力系统对电力设备的稳定运行和状态感知提出了更高要求[1-2]。高压断路器(High-Voltage Circuit Breaker, HVCB)作为电力系统中的关键保护设备,利用数字化手段掌握高压断路器发展态势并实现故障预警具有重要意义。统计数据显示,高压断路器的操动机构缺陷在主要故障中占比较高,是导致高压断路器动作异常的主要原因之一[3-5]。
借助先进人工智能技术,数据驱动已成为高压断路器状态评估和故障诊断的重要途径[6-7]。操动机构的机械状态表征形式丰富[8],包括行程曲线、振动信号、声音信号等。基于数据驱动的操动机构故障诊断方法首先利用能量轨迹熵、逐次变分模态分解、相空间重建等特征提取方法[9-13]获取操动机构不同机械故障下的监测信号特征;再以支持向量 机[14]、神经网络[15-16]、注意力机制[17]等机器学习网络为基础建立操动机构故障诊断模型。
目前,实现操动机构机械状态识别的技术思路主要集中于确定操动机构的故障类型。然而,操动机构的故障状态通常源于多个部件的综合作用。即使各部件单独未发生劣化,其相互作用仍可能导致操动机构机械性能下降。因此,定量获取操动机构关键部件的机械参数,将更有利于关键部件的状态评价,为操动机构的机械状态诊断和故障溯源提供数据基础。实现高精度的高压断路器操动机构关键机械参数辨识,需考虑以下两方面问题:①高压断路器操动机构的机械特性受多部件交互影响,且不同故障工况下的机械特性表现可能存在较高相似性;②操动机构运动遵循一定的物理规律。
操动机构各部件联动引起的机械状态变化反映了各部件与机械状态之间的相互作用,而特定机械参数与机械状态之间也蕴含着独特关联。迁移学习利用已获得的知识(源域)来提升新任务(目标域)的学习效率,通过模型参数的迁移和微调建立新旧任务之间的联系,更有效地提取目标域的特征信息,其思想在电力设备[18]和电网[19]的故障诊断中取得了良好的应用效果。
物理信息神经网络(Physics-Informed Neural Networks, PINN)将物理约束嵌入神经网络,利用物理法则指导模型学习过程[20],通过物理信息和数据双驱动的方式为多物理场的偏微分方程求解、数据驱动模型的物理一致性问题提供了重要的解决思路。PINN在电力系统领域已得到初步验证,如将转速与功角间的微分关系嵌入功角轨迹预测模型[21]、利用深度算子模型求解物理场以建立流注放电代理模型[22]。
本文基于一维卷积神经网络(1D Convolutional Neural Network, 1DCNN)和多头注意力机制,提出了一种新型迁移网络模型,即融合物理信息的双阶段卷积-Transformer网络(Dual-stage Convolution- Transformer network with Physical information, DCT- P)。DCT-P的共有特征学习网络作为源模型,挖掘操动机构机械特征和各部件机械参数间的公共知识,特有特征学习网络作为目标模型,进一步学习机械特征与特定机械参数间的专有知识。根据操动机构的动作机理及机械特性,在模型训练过程中引入物理信息,提高模型精度及机械参数间的物理一致性。基于该方法能够有效依据断路器的行程曲线,实现操动机构关键部件的机械参数辨识,从而为高压断路器的机械故障诊断和缺陷溯源提供依据。
弹簧操动机构具有动作速度快、可靠性高、体积小、质量轻等优点,在高压断路器中广泛使用。
为分析关键部件工况对操动机构特性的影响,建立配CT26弹簧操动机构的LW30-252型断路器的机械特性仿真模型。为了确保仿真模型的保真性,利用LW30-252断路器样机的实验结果校准仿真模型,如图1所示。实验通过控制合闸线圈和分闸线圈,进行先合闸后分闸测试。正常工况下现场实验和仿真模型获取的行程曲线对比如图2所示,二者重合度较高,合、分闸速度和合、分闸时间误差均在1%以内,验证了仿真模型的准确性。
基于所建立的机械特性仿真模型,分析关键故障类型对操动机构机械特性的影响,包括合闸弹簧性能下降、分闸弹簧性能下降、分闸弹簧法兰紧固螺栓松动、缓冲器性能衰退、机构卡涩及拐臂轴孔磨损,各故障的仿真设置方法如下:
(1)合闸弹簧、分闸弹簧性能下降。更改合闸弹簧、分闸弹簧的刚度系数及力值,力值由所设置的刚度系数及弹簧当前长度计算得出。
图1 LW30-252断路器的机械特性仿真模型及实验校准
Fig.1 Simulation model of mechanical characteristics and experimental calibration for the LW30-252 circuit breaker
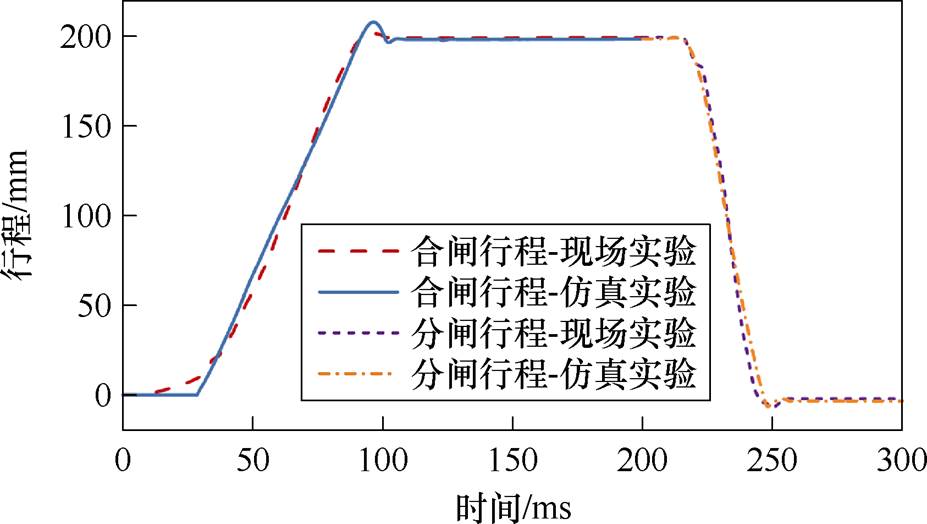
图2 行程曲线的实验和仿真结果对比
Fig.2 Comparison of stroke curves by experimental and simulation
(2)分闸法兰紧固螺栓松动。更改分闸法兰的相对位移。
(3)缓冲器性能。根据缓冲器节流孔的位置设置不同工况的阻尼系数曲线,并与缓冲器活塞杆运动速度相乘,从而模拟缓冲器的阻尼特性。
(4)机构卡涩。改变输出轴的旋转摩擦系数。
(5)拐臂轴孔磨损。轴销直径减小1 mm,通过基于Archard磨损模型的磨损仿真确定拐臂轴孔的磨损位置,修改轴孔孔径三维几何模型,替换正常的拐臂模型以模拟轴孔磨损下的机构动作。
将操动机构机械故障分为单一故障和复合故障,见表1。
表1 弹簧操动机构机械故障类型
Tab.1 Mechanical fault type of the spring operating mechanism
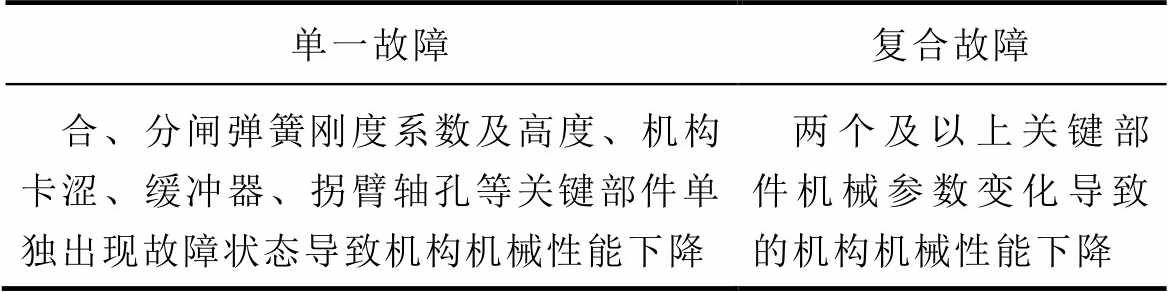
单一故障复合故障 合、分闸弹簧刚度系数及高度、机构卡涩、缓冲器、拐臂轴孔等关键部件单独出现故障状态导致机构机械性能下降两个及以上关键部件机械参数变化导致的机构机械性能下降
单一故障对操动机构机械特性的影响如图3所示。合闸弹簧和分闸弹簧作为提供动力源的核心部件,随着操动机构操作次数的增加和长期的储能压缩,合闸弹簧和分闸弹簧产生的疲劳或应力松弛现象导致刚度系数下降。因振动等原因导致的弹簧法兰紧固螺栓松动造成弹簧储能不足。弹簧的刚度系数下降或压缩量不足均会引起储能下降,进而影响分合闸速度。缓冲器参与操动机构的运动过程以提高机构的可靠性和稳定性,缓冲器性能下降引起其介入阶段的合闸速度和分闸速度加快。机构卡涩会减缓机构的运动速度。轴销与拐臂轴孔配合不良导致轴孔局部磨损且逐渐增强,轴销与轴孔之间的间隙碰撞造成机构运动波动增大。
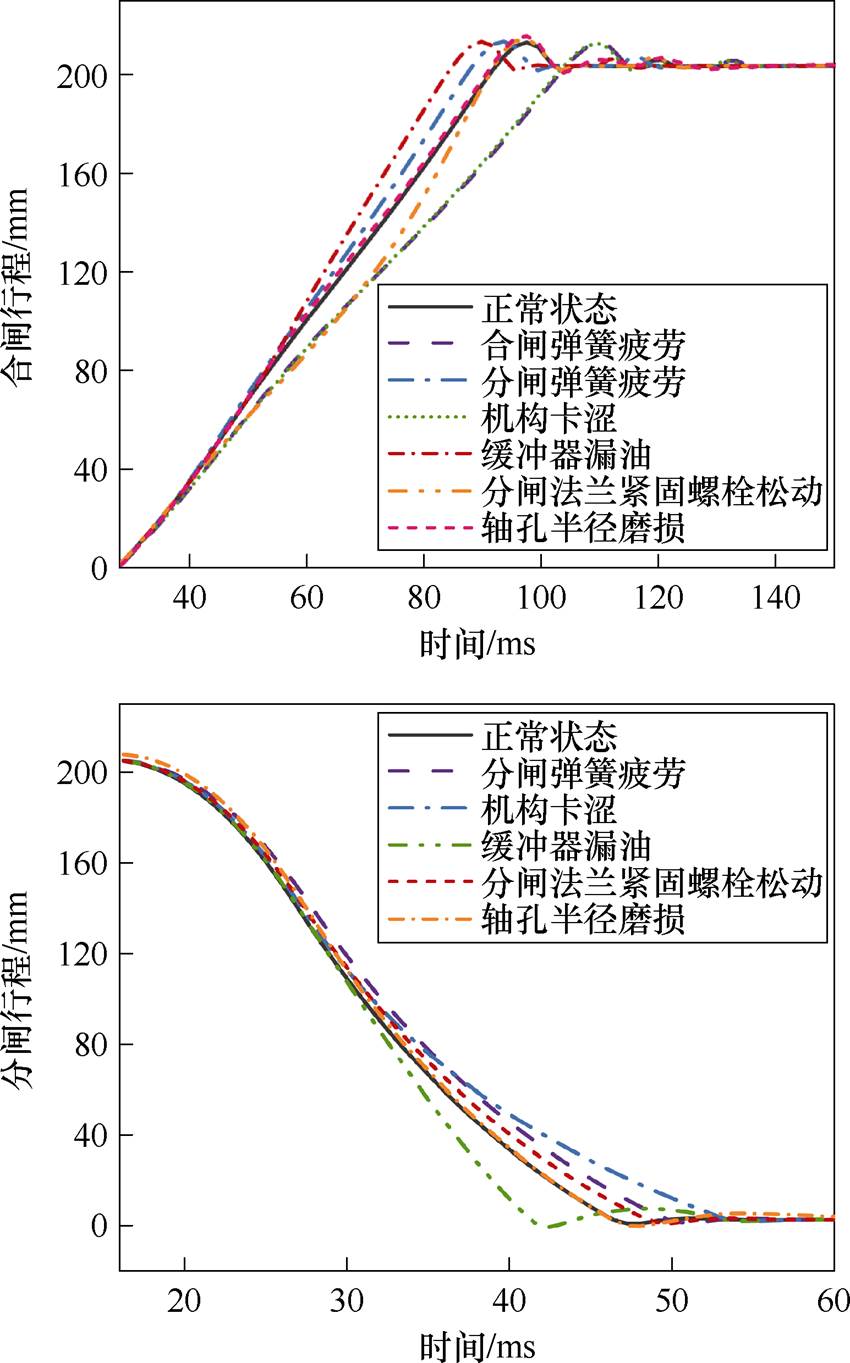
图3 单一故障对操动机构机械特性的影响
Fig.3 The influence of single fault on the mechanical characteristics of the operating mechanism
操动机构的机械特性受多部件机械状态的相互制约和共同作用。例如,缓冲器产生的缓冲力受输出拐臂运动状态和缓冲器阻尼力影响。输出拐臂的运动状态同时取决于弹簧驱动力、机构卡涩状态、缓冲力等多因素的共同作用。关键部件故障逐步叠加产生的复合故障对操动机构机械特性的影响如图4所示,图4中,用实心符号和空心符号分别代表部件的正常工况和故障工况。单一部件的故障状态通常需要达到一定的严重程度才能显著影响机械性能,而多部件同时存在缺陷时,即使各部件故障程度相对较轻,也会对机构整体的机械性能产生重要影响。相比于单一部件故障,多部件性能同时下降对机构机械特性产生协同影响,非线性效应增强,增加了故障诊断的难度。
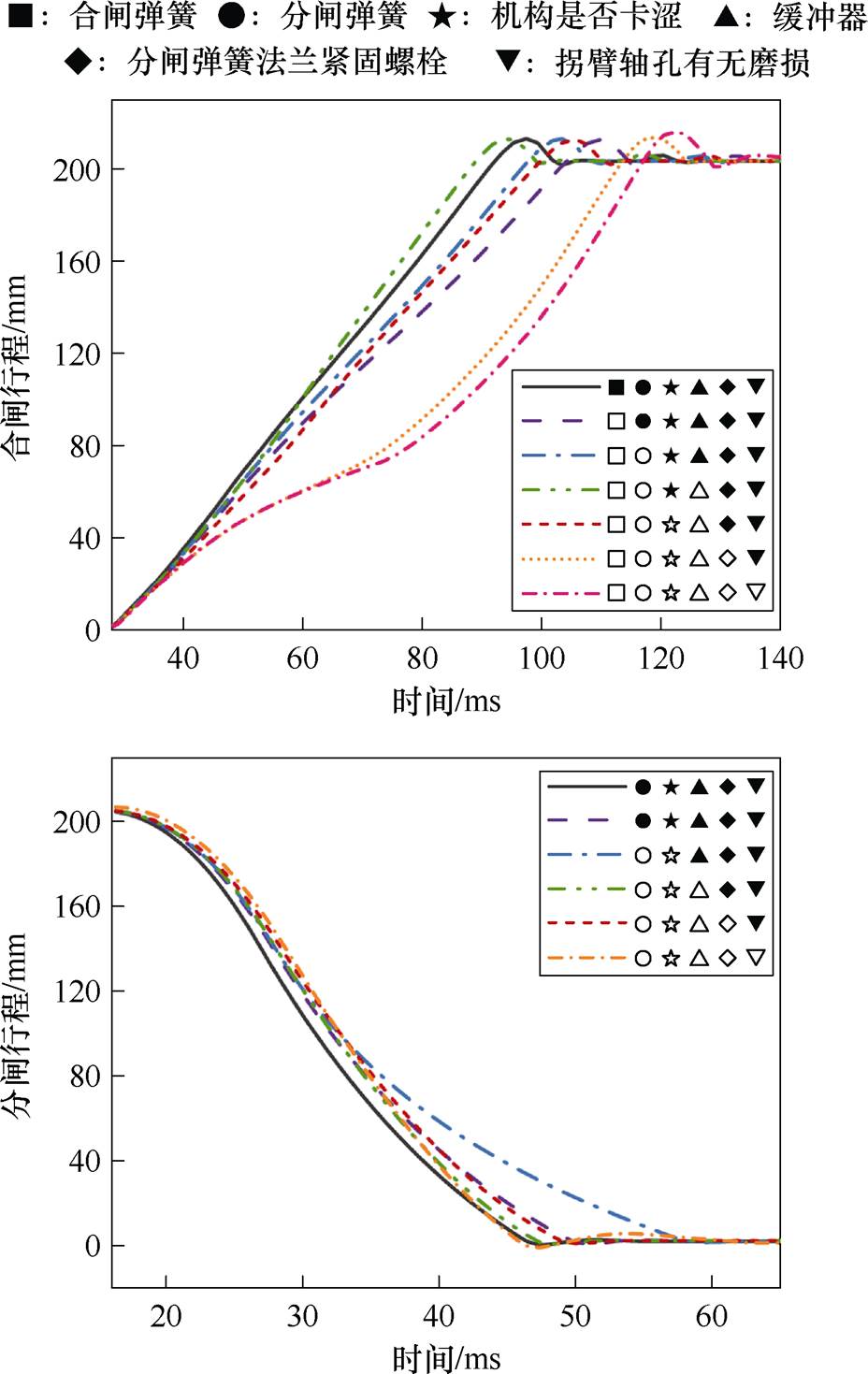
图4 复合故障对操动机构机械特性的影响
Fig.4 The influence of compound fault on the mechanical characteristics of the operating mechanism
弹簧操动机构的机械参数是机构运动的核心要素,通过机械参数辨识获取关键部件的机械参数,能够直接反映关键部件的健康状态,进而分析操动机构呈现故障状态的原因,为故障诊断和故障溯源建立数据基础。
卷积神经网络特征提取能力强,被广泛应用于分类和回归任务,由卷积层(Conv)、池化层(Pool)、全连接层(Fully Connected, FC)等结构组成。
卷积层通过局部连接的方式,应用卷积核对输入数据进行卷积操作,从而有效提取输入数据的局部特征,1维卷积层的卷积操作为
 (1)
(1)
式中, 和
和 分别为第u-1层和第u层的输出;
分别为第u-1层和第u层的输出; 和
和 分别为第u层的卷积核和偏置;M为的通道数;
分别为第u层的卷积核和偏置;M为的通道数; 为激活函数,激活函数通过引入非线性,提升网络对数据非线性关系的学习能力。
为激活函数,激活函数通过引入非线性,提升网络对数据非线性关系的学习能力。
池化层连接在卷积层之后,其主要功能是通过降低卷积层的输出维度以减少网络参数,从而达到减少计算量和防止过拟合的效果。常用的池化操作包括最大池化和平均池化,分别在预定区域内计算最大值和平均值作为输出结果。
全连接层的神经元与前一层每个神经元相连,全连接层通过学习权重和偏置,增强模型的表达能力。假设全连接层的前一层为网络的u-1层,则全连接层的输出为
 (2)
(2)
式中, 为权重。
为权重。
注意力机制能够捕捉输入序列中任意位置的信息,具有提取全局特征的能力,其变体被广泛应用于深度学习网络[23]。
多头注意力机制(Multi-Head Attention, MHA)通过缩放点积注意力(Scaled Dot-Product Attention, SDPA)和线性层以及拆分、拼接等操作实现,如图5所示。缩放点积注意力方程为
 (3)
(3)
式中,Q、K、V分别为查询、键和值矩阵,由输入序列进行不同的线性变换获得;dk为键的维度;softmax为网络激活函数。多头注意力机制结合多个并行的缩放点积注意力,使模型在不同位置同时关注不同子空间的信息,从而提高特征学习能力,有
 (4)
(4)
式中, 、
、 、
、 为线性层训练得到的权重矩阵。W权重矩阵通过Concat函数拼接各注意力头的输出,并将其映射到模型的原始维度。
为线性层训练得到的权重矩阵。W权重矩阵通过Concat函数拼接各注意力头的输出,并将其映射到模型的原始维度。
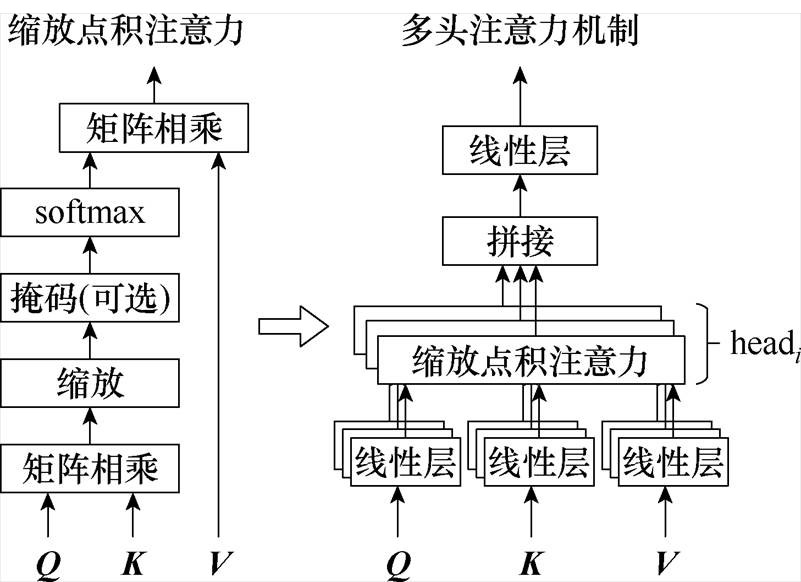
图5 多头注意力机制
Fig.5 Multi-head attention
2.3.1 DCT-P网络结构
本文基于一维卷积神经网络和多头注意力机制,融合操动机构物理信息,建立了DCT-P迁移网络结构,如图6所示。DCT-P模型由共有特征学习网络(Common Feature Learning Network, CFLN)和特有特征学习网络(Specific Feature Learning Network, SFLN)两部分组成。两类特征学习网络结构相似,由输入层、中间层(特征提取层)和输出层组成。CFLN作为源模型,挖掘行程曲线与关键部件机械参数之间的公共特征。考虑各关键部件物理信息的差异性,将各关键部件的机械参数作为输出目标,为各关键部件建立针对性的SFLN,从而加强对特定关键部件机械参数的特征提取。SFLN作为目标模型,训练时冻结中间层第一层的网络结构和参数,在CFLN的基础上微调。
输入层和输出层分别为行程曲线组成的样本矩阵。CFLN和SFLN的输入层相同,均为行程曲线样本矩阵;CFLN的输出层由所有关键部件的机械参数构成,SFLN的输出层则仅包含特定关键部件的机械参数。
中间层由两层构成:第一层由卷积层-池化层-卷积层-池化层-全连接层的结构组成,两个卷积层的输出通道数分别为128和512,卷积层和池化层的卷积核大小为2,卷积层和全连接层的激活函数为ReLU函数;第二层以多头注意力机制为核心,由N层结构相同的子模块堆叠而成。
为确立CFLN和SFLN的最优网络参数,基于贝叶斯优化思想指导网络参数寻优,其参数优化目标函数fobj及最优超参数组合 为
为
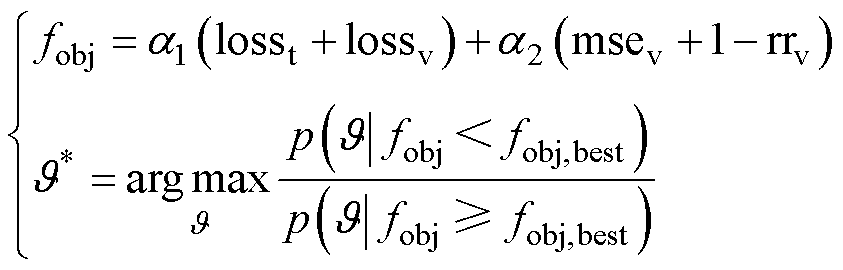 (5)
(5)
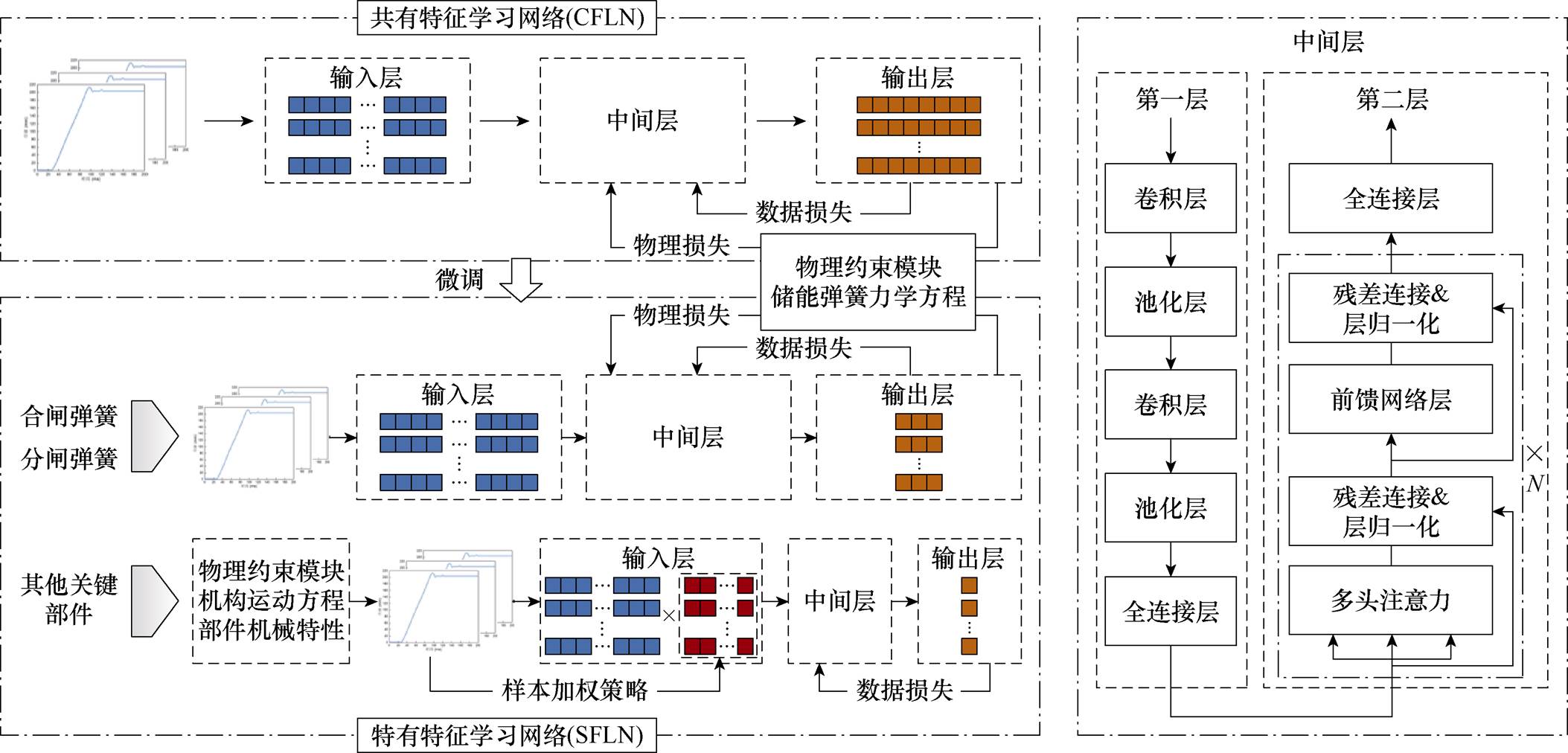
图6 面向高压断路器弹簧操动机构机械参数辨识的DCT-P迁移网络
Fig.6 DCT-P transfer network for mechanical parameter identification of spring operating mechanism of HVCB
式中, 为超参数组合
为超参数组合 的条件概率分布;losst为训练集的损失;lossv、msev和rrv分别为验证集的损失、方均误差(Mean Square Error, MSE)和R2;
的条件概率分布;losst为训练集的损失;lossv、msev和rrv分别为验证集的损失、方均误差(Mean Square Error, MSE)和R2; 和
和 为平衡系数;fobj,best为当前最优的目标函数值。待寻优的网络参数包括CFLN全连接层的输出维度、SFLN的多头注意力的头数和层数、物理约束的权重系数等。
为平衡系数;fobj,best为当前最优的目标函数值。待寻优的网络参数包括CFLN全连接层的输出维度、SFLN的多头注意力的头数和层数、物理约束的权重系数等。
2.3.2 物理信息的转换及嵌入
将操动机构各部件视为理想刚体杆件,建立包含操动机构及触头的理想铰刚体动力学模型,如图7所示。合闸弹簧和分闸弹簧释放能量推动输出拐臂FH旋转,联动DEFH运动模块和BCD运动模块实现机构的合闸、分闸动作, 为各广义坐标的角位移。铰点D和铰点O为固定铰点。
为各广义坐标的角位移。铰点D和铰点O为固定铰点。 为铰点B和铰点D在y轴方向上的位移差值,
为铰点B和铰点D在y轴方向上的位移差值, 和
和 分别为铰点D和铰点O在y轴和x轴方向上的位移差值,、和均恒定不变。杆件CD和杆件DE同轴旋转,角位移相差定值
分别为铰点D和铰点O在y轴和x轴方向上的位移差值,、和均恒定不变。杆件CD和杆件DE同轴旋转,角位移相差定值 。
。
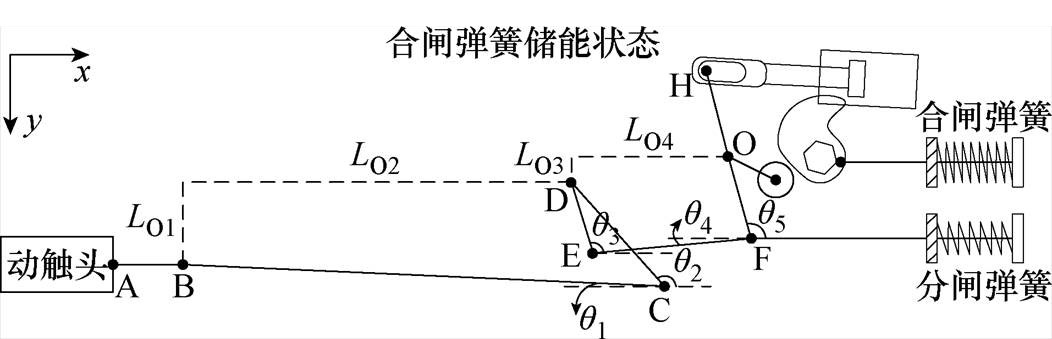
图7 弹簧操动机构(含触头)的理想铰刚体动力学模型
Fig.7 Ideal hinged rigid body dynamic model of spring operating mechanism (including the contact)
合闸弹簧和分闸弹簧产生的驱动力满足胡克定律,有
 (6)
(6)
式中,FS和KS分别为弹簧力值和弹簧刚度系数;XS0和XS1分别为弹簧原长和当前的长度。
操动机构的运动受几何和运动学约束。动触头的质心位移及BCD运动模块的运动约束分别为
 (7)
(7)
 (8)
(8)
式中, 为动触头质心的初始位置;S、
为动触头质心的初始位置;S、 和
和 分别为动触头、铰点B和铰点D的位移,为定值;
分别为动触头、铰点B和铰点D的位移,为定值; 、
、 和
和 分别为杆件AB、BC和CD的长度;L0为铰点A到动触头质心的距离。
分别为杆件AB、BC和CD的长度;L0为铰点A到动触头质心的距离。
DEFH运动模块的运动约束为
 (9)
(9)
式中, 、
、 和
和 分别为杆件DE、EF和FO的长度。
分别为杆件DE、EF和FO的长度。
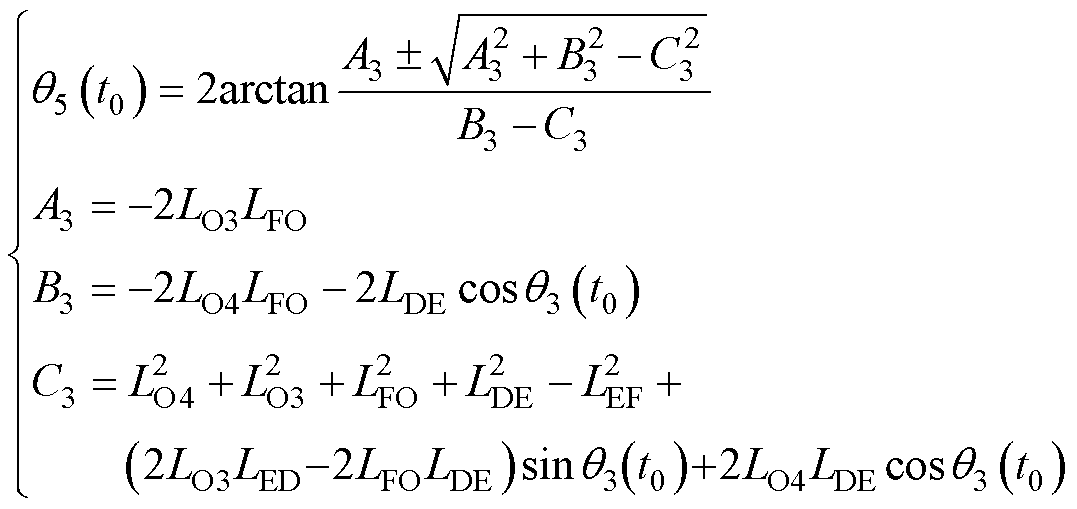
对于分合闸弹簧,在DCT-P网络训练过程中引入弹簧的力学物理规律,设计了由数据损失和物理损失组成的损失函数为
 (10)
(10)
式中, 和
和 分别为输出目标的真实值和模型计算值;lossd和lossp分别为数据损失和物理损失;cd和cp分别为数据损失和物理损失的平衡系数,数据损失和物理损失均采用方均误差损失函数;fp为分合闸弹簧的物理约束方程,如式(6)所示。
分别为输出目标的真实值和模型计算值;lossd和lossp分别为数据损失和物理损失;cd和cp分别为数据损失和物理损失的平衡系数,数据损失和物理损失均采用方均误差损失函数;fp为分合闸弹簧的物理约束方程,如式(6)所示。
对于缓冲器,缓冲器参与操动机构的部分运动过程,其作用起始时刻 与
与 角位移相关。结合式(7)~式(9),通过行程曲线获取的计算过程如式(11)~式(13)所示。将操动机构到达最大行程的时刻记为
角位移相关。结合式(7)~式(9),通过行程曲线获取的计算过程如式(11)~式(13)所示。将操动机构到达最大行程的时刻记为 ,为~区间内的监测信号设置样本权重,从而加强特有特征网络对缓冲器力值的训练影响。
,为~区间内的监测信号设置样本权重,从而加强特有特征网络对缓冲器力值的训练影响。

 (11)
(11)
 (12)
(12)
 (13)
(13)
对于拐臂DE轴孔磨损,以合闸过程为例,当操动机构其他部件为正常状态时,拐臂轴孔磨损对弹簧操动机构的机械特性影响如图8所示。随着轴销松动并引起轴孔半径的最大磨损量从0.3 mm增大至1.5 mm,机构运动的波动性增强,动触头的最大行程增加。因此,在特有特征网络训练中对动触头最大行程至保持阶段的样本值添加权重系数,从而加强特有特征网络对拐臂轴孔半径的训练影响。
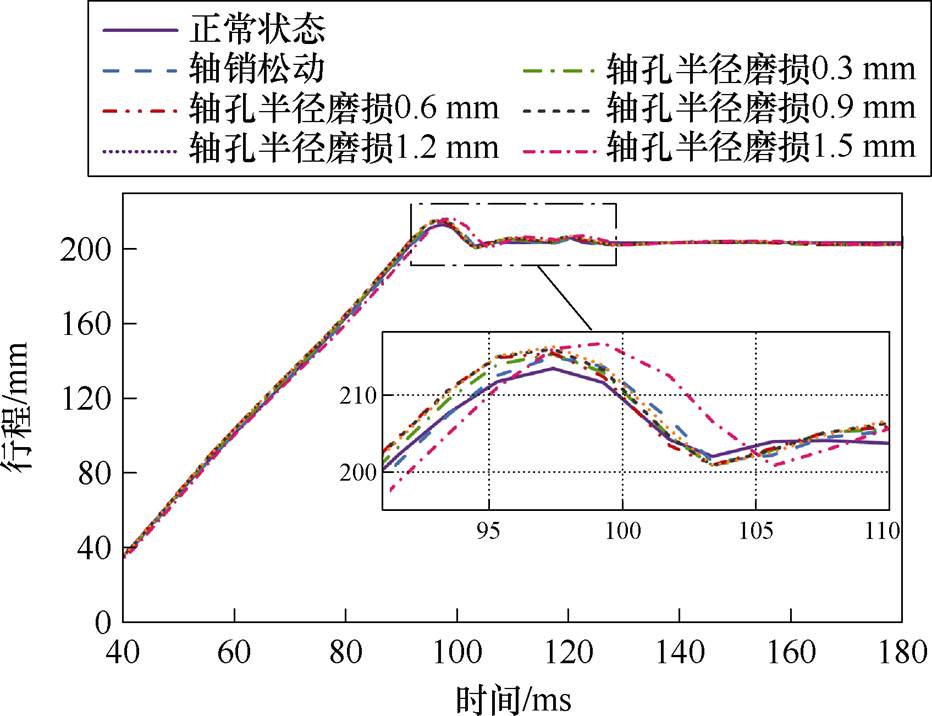
图8 拐臂轴孔磨损对操动机构机械特性的影响
Fig.8 The influence of shaft hole wear in the crank arm on mechanical characteristics of the operating mechanism
为加快故障样本产生速度,基于第1节所述的故障仿真策略,利用Python对ADAMS进行二次开发,完成复合故障工况下的合闸及分闸过程的批量仿真实验。设置机械状态数据集的机械参数规则见表2,采用均匀实验设计方法获得了复合故障工况下的62 244组合闸机械状态样本、19 200组分闸机械状态样本。
表2 操动机构机械状态数据集机械参数设置规则
Tab.2 Setting rules for mechanical parameters of mechanical state dataset of the operating mechanism
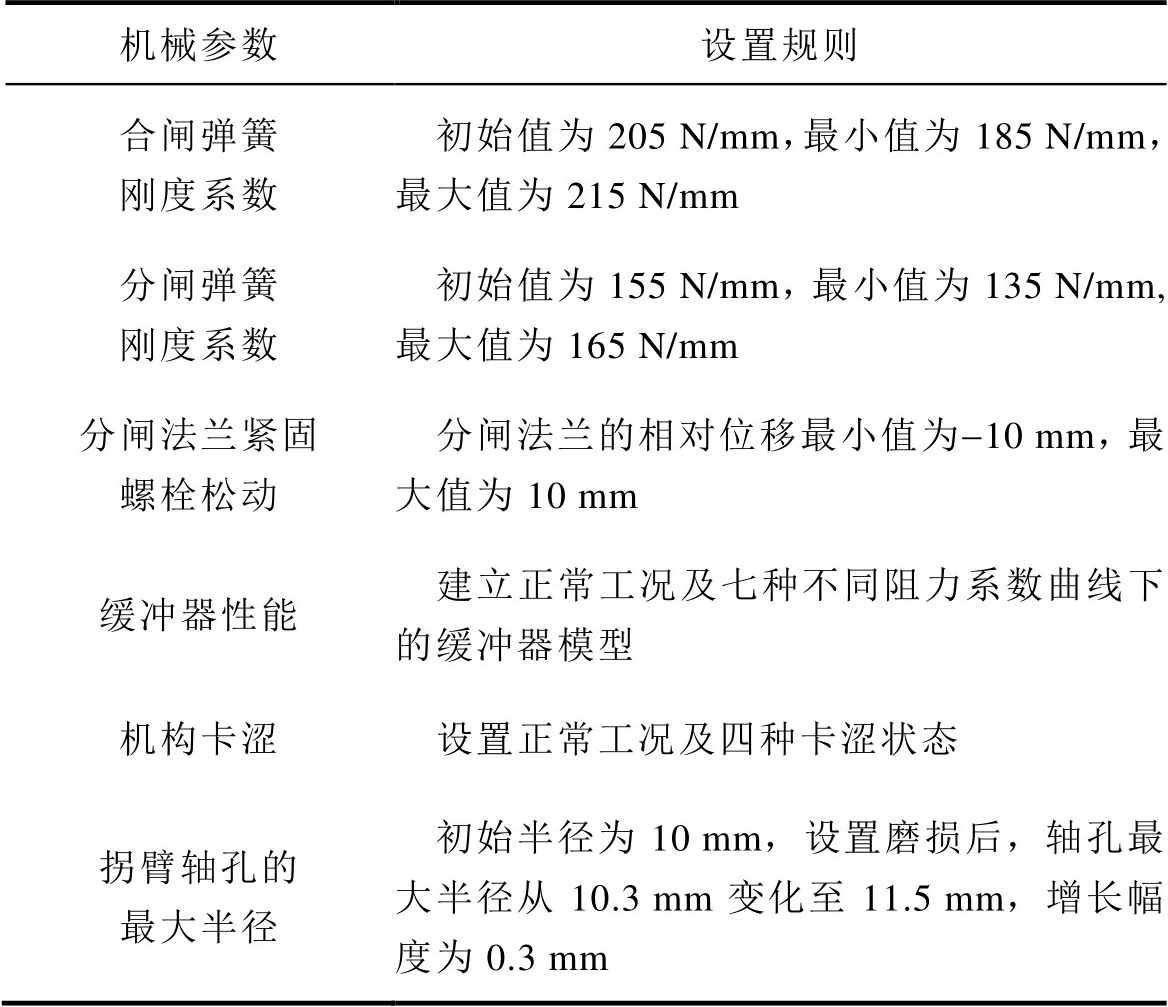
机械参数设置规则 合闸弹簧刚度系数初始值为205 N/mm,最小值为185 N/mm,最大值为215 N/mm 分闸弹簧刚度系数初始值为155 N/mm,最小值为135 N/mm, 最大值为165 N/mm 分闸法兰紧固螺栓松动分闸法兰的相对位移最小值为-10 mm,最大值为10 mm 缓冲器性能建立正常工况及七种不同阻力系数曲线下的缓冲器模型 机构卡涩设置正常工况及四种卡涩状态 拐臂轴孔的最大半径初始半径为10 mm,设置磨损后,轴孔最大半径从10.3 mm变化至11.5 mm,增长幅度为0.3 mm
3.2.1 机械参数辨识模型实验设置
将行程曲线作为操动机构机械参数辨识模型的输入,对应的操动机构机械参数为输出目标。模型训练前,以正常工况下的时间序列为基准,对各行程曲线进行对齐。合闸机械状态样本中,合闸弹簧力值为合闸弹簧储能力值,分闸弹簧的力学参数为预压状态下的力值和高度。分闸机械状态样本中,分闸弹簧的力学参数为储能状态的力值和高度。
本文分别从合闸机械状态样本及分闸机械状态样本中随机抽取3 200组样本进行模型性能的对比实验及分析。将合闸机械状态数据集与分闸机械状态数据集以80% 15%5%的比例划分为训练集、验证集以及测试集。模型性能通过方均误差(MSE)、R2、相对误差(Relative Error, RE)评价,有
15%5%的比例划分为训练集、验证集以及测试集。模型性能通过方均误差(MSE)、R2、相对误差(Relative Error, RE)评价,有
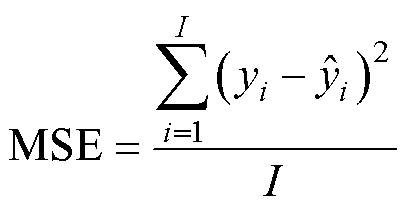 (14)
(14)
 (15)
(15)
 (16)
(16)
式中, 、
、 和
和 分别为输出样本的计算值、真实值和真实值的平均值;I为测试样本总数。MSE越小、R2越高,模型的辨识精度越高、拟合程度越高。
分别为输出样本的计算值、真实值和真实值的平均值;I为测试样本总数。MSE越小、R2越高,模型的辨识精度越高、拟合程度越高。
3.2.2 操动机构机械参数辨识模型对比分析
为评估本文提出的DCT-P网络的优势,选择不同原理的多输入多输出回归模型作为对比,分别为多输出最小二乘支持向量回归(Multi-output Least- Squares Support Vector Regression, MLS-SVR)[24]、可解释的多目标回归随机森林(eXplainable Multi Target Regression random forests, XMTR)[25]、多输出高斯过程混合模型(Multi-Output Mixture of Gaussian Processes, MOMoGP)[26]、深度多模态迁移学习回归模型(Deep Multimodal Transfer-Learned Regressor, DMTL-R)[27],各模型说明见表3。为消除数据集选择对模型性能的影响,对各对比模型均重复进行10次随机实验,并将平均值作为最终结果。
表3 对比实验的模型说明
Tab.3 Model explanation of comparative experiments
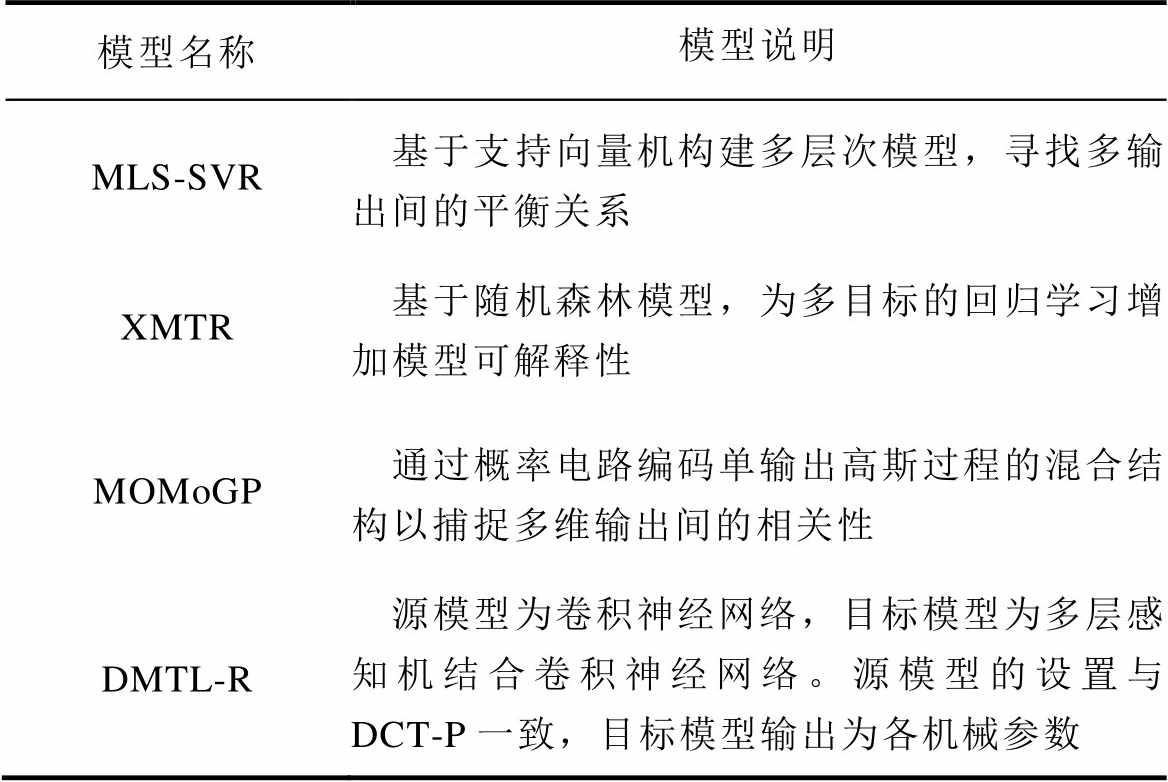
模型名称模型说明 MLS-SVR基于支持向量机构建多层次模型,寻找多输出间的平衡关系 XMTR基于随机森林模型,为多目标的回归学习增加模型可解释性 MOMoGP通过概率电路编码单输出高斯过程的混合结构以捕捉多维输出间的相关性 DMTL-R源模型为卷积神经网络,目标模型为多层感知机结合卷积神经网络。源模型的设置与DCT-P一致,目标模型输出为各机械参数
各模型对测试集机械参数辨识的相对误差见表4和表5。可以看出,所选择的对比模型对分闸动作各机械参数的计算均较好,但对合闸动作的缓冲力辨识效果不佳。基于支持向量机和高斯过程的MLS-SVR和MOMoGP模型对于弹簧力学参数的辨识具有一定优势,但对其他参数的辨识精度不足。并且MLS-SVR模型因涉及矩阵计算,在样本数量过多时会占用大量计算机内存。相比于XMTR和DMTL-R,本文提出的DCT-P模型对于各机械参数均达到了最好的辨识精度。对于机构卡涩系数的辨识,DCT-P与MOMoGP对分闸动作卡涩系数的辨识能力相近,此外,DCT-P显著优于其他模型。综合来看,相比于其他模型,DCT-P对各机械参数的辨识准确度较高且更平衡。
表4 不同模型下合闸动作机械参数辨识的相对误差
Tab.4 RE of mechanical parameter identification of closing operation under different models (%)
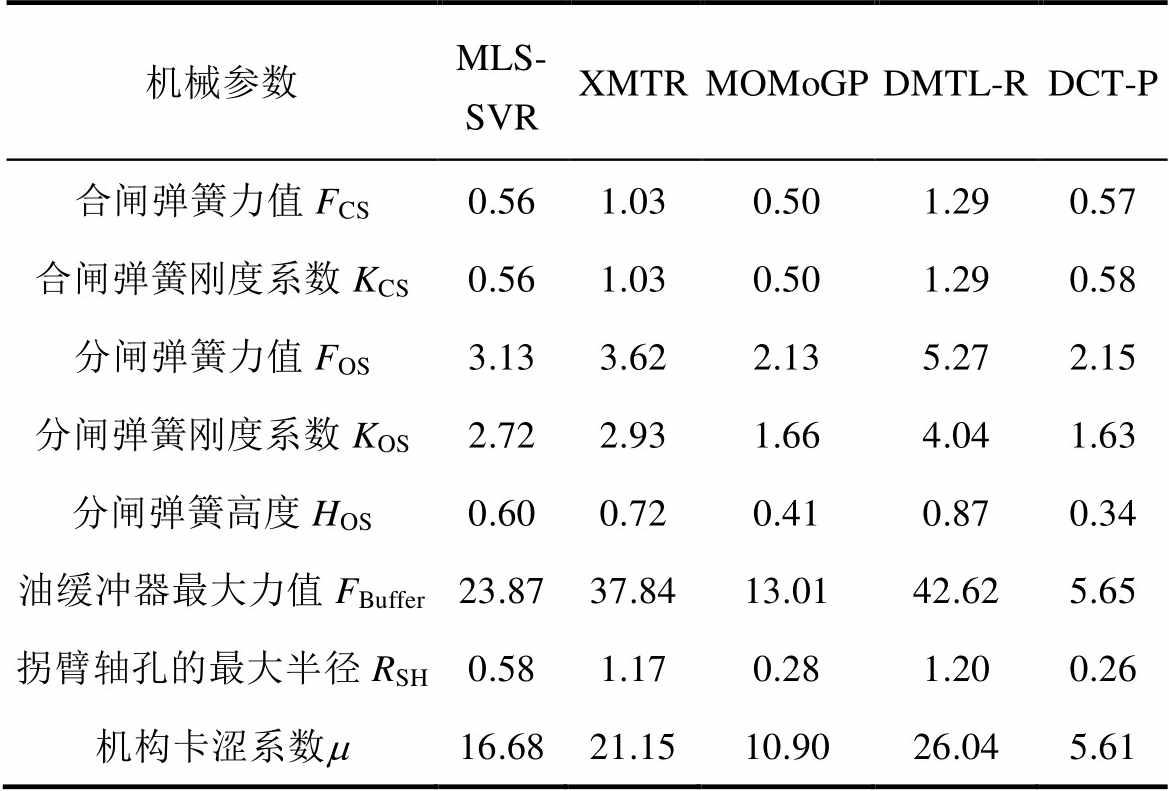
机械参数MLS- SVRXMTRMOMoGPDMTL-RDCT-P 合闸弹簧力值FCS0.561.030.501.290.57 合闸弹簧刚度系数KCS0.561.030.501.290.58 分闸弹簧力值FOS3.133.622.135.272.15 分闸弹簧刚度系数KOS2.722.931.664.041.63 分闸弹簧高度HOS0.600.720.410.870.34 油缓冲器最大力值FBuffer23.8737.8413.0142.625.65 拐臂轴孔的最大半径RSH0.581.170.281.200.26 机构卡涩系数m16.6821.1510.9026.045.61
表5 不同模型下分闸动作机械参数辨识的相对误差
Tab.5 RE of mechanical parameter identification of opening operation under different models (%)
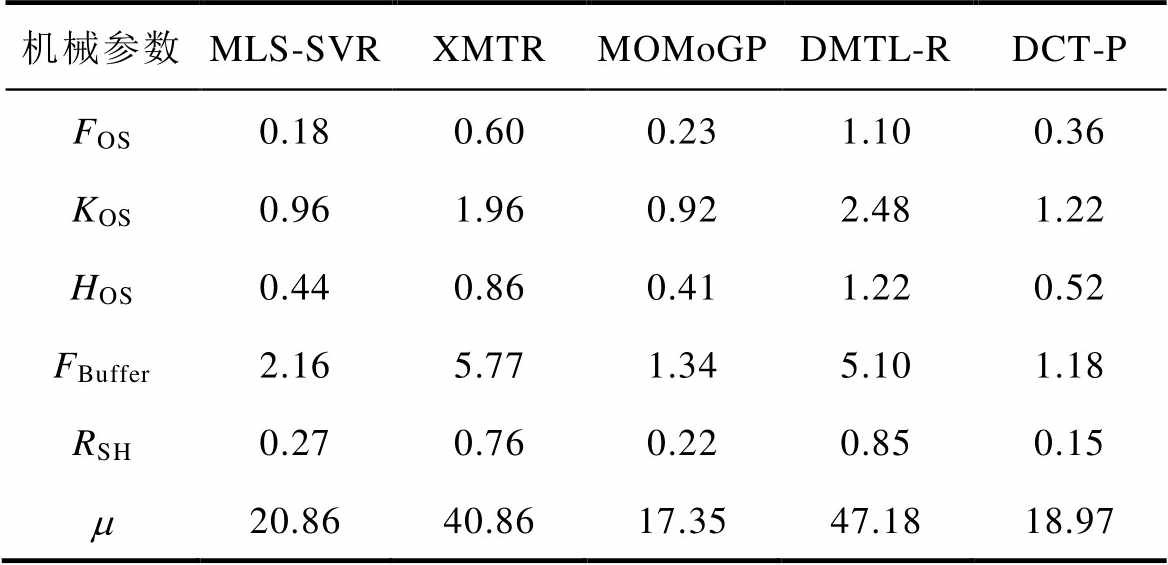
机械参数MLS-SVRXMTRMOMoGPDMTL-RDCT-P FOS0.180.600.231.100.36 KOS0.961.960.922.481.22 HOS0.440.860.411.220.52 FBuffer2.165.771.345.101.18 RSH0.270.760.220.850.15 m20.8640.8617.3547.1818.97
3.2.3 基于DCT-P机械参数辨识模型的操动机构故障诊断
本文所研究的操动机构平均分闸速度和平均合闸速度分别为(8.4±0.6) m/s和(4.4±0.6) m/s。参考《六氟化硫高压断路器状态评价导则》,当单个部件机械参数变化导致合闸速度或分闸速度超出技术指标时,视该部件处于故障状态。分析各部件工况对操动机构的机械特性影响,各部件正常状态的机械参数范围见表6。
表6 各部件正常工况的机械参数范围
Tab.6 Mechanical parameter ranges of each component under normal conditions
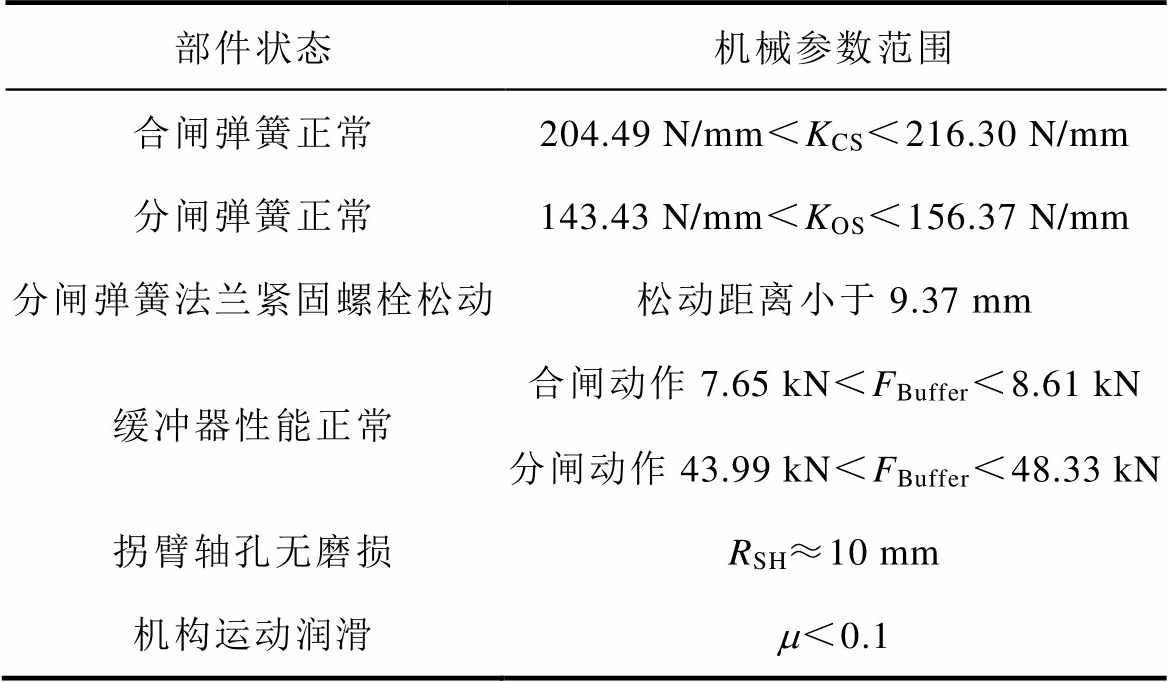
部件状态机械参数范围 合闸弹簧正常204.49 N/mm<KCS<216.30 N/mm 分闸弹簧正常143.43 N/mm<KOS<156.37 N/mm 分闸弹簧法兰紧固螺栓松动松动距离小于9.37 mm 缓冲器性能正常合闸动作7.65 kN<FBuffer<8.61 kN 分闸动作43.99 kN<FBuffer<48.33 kN 拐臂轴孔无磨损RSH≈10 mm 机构运动润滑m<0.1
利用DCT-P对测试集的机械参数辨识结果进行故障诊断准确率验证,鉴于行程曲线是在复合故障条件下获取的,分别对各部件状态的单独诊断准确率和同时诊断所有部件状态的准确率进行评价。对10组测试集的各工况行程曲线进行故障诊断,得到各部件的故障诊断平均准确率如图9所示。
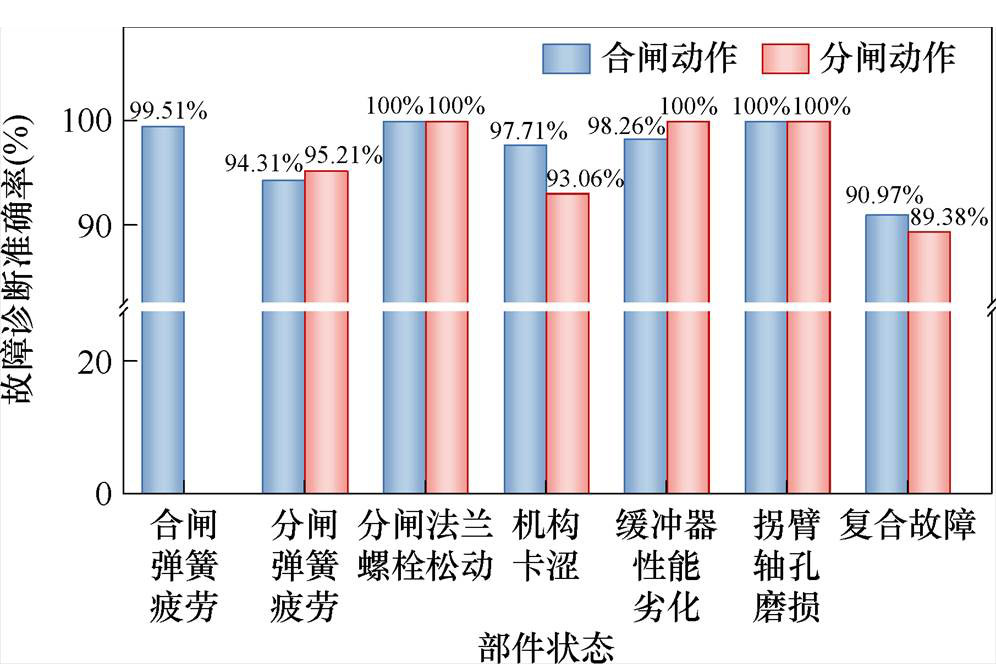
图9 基于DCT-P机械参数辨识的故障诊断
Fig.9 Fault diagnosis based on the mechanical parameter identification results obtained from DCT-P
可以看出,单独判断各部件状态时,基于DCT-P机械参数辨识结果的故障诊断准确率达到93%以上,分闸法兰螺栓松动和拐臂轴孔磨损的诊断准确率达到100%。设置部件机械参数时,合闸弹簧高度不变,分闸弹簧高度随紧固螺栓松动距离而变化,分闸弹簧的机械特性变化设置相比合闸弹簧更加复杂。结合表4和表5,合闸弹簧及分闸弹簧的力学参数辨识相对误差分别低于0.6%和2%,合闸弹簧的力学参数辨识结果优于分闸弹簧。基于弹簧力学参数辨识结果的故障诊断中,对于合闸弹簧和分闸弹簧疲劳状态的诊断准确率分别高于99%和94%,合闸弹簧的状态评价效果优于分闸弹簧,与机械参数辨识效果一致。
在合闸动作和分闸动作中,机构卡涩系数的参数辨识相对误差分别为5.61%和18.97%,机构卡涩故障诊断的准确率分别为97.97%和93.06%。对于机构卡涩的机械参数辨识和故障诊断,合闸动作均优于分闸动作,其原因在于合闸动作相比分闸动作涉及的部件更多,合闸运动时产生的法向力及摩擦力更大,在相同的摩擦系数下,机构卡涩对合闸运动的影响大于分闸运动,其特征也更容易被辨识。
合闸动作和分闸动作中各部件故障单独诊断的最低准确率分别为94.31%与93.06%,复合故障的诊断准确率分别为90.97%和89.38%。复合故障和单一故障的故障诊断效果相差不大,证明了DCT-P能够较为平衡地同时辨识各部件的机械参数,从而较好地对复合故障进行故障诊断。
3.3.1 物理信息对DCT-P模型性能的影响
为测试物理信息嵌入对DCT-P性能的影响,对有无物理信息的模型随机设置30组相同的模型超参数,利用同一组数据样本进行训练和测试。物理信息提高DCT-P机械参数辨识能力的比例如图10所示,在各机械参数辨识实验中,物理信息嵌入提高了模型对于机械参数辨识能力的比例,平均为83.5%,合闸动作中分闸弹簧力学参数的辨识性能提高比例达到90%及以上。
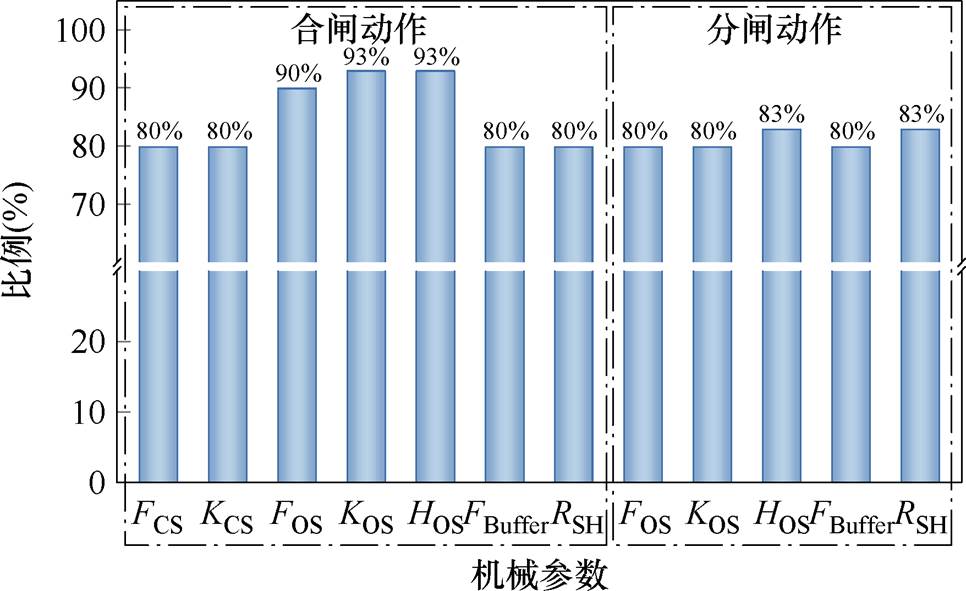
图10 物理信息提高DCT-P机械参数辨识能力的比例
Fig.10 The proportion of physical information improving the mechanical parameter identification ability of DCT-P
物理信息对测试集的机械参数辨识性能影响见表7。可以看出,在模型训练过程中引入物理信息,普遍提高了对各机械参数的辨识能力,MSE和RE平均降低了13.82%和7.80%,R2平均相对提升了0.89%。对于弹簧的力学参数辨识,如合闸动作中的合闸弹簧刚度系数和分闸弹簧高度、分闸动作中的分闸弹簧刚度系数,嵌入基于力学方程的物理损失对于DCT-P辨识结果的提升不显著,其主要原因为,物理损失约束的引入使得模型的优化难度提升,这要求模型在训练过程中逐渐平衡数据损失和物理损失,从而导致有物理信息的模型在训练初期收敛速度减慢。但经过充分的训练,模型能够更好地满足物理一致性,使弹簧力学参数的预测结果更符合其力学规律。
表7 物理信息嵌入对模型性能的影响
Tab.7 Impact of embedding physical information on model performance
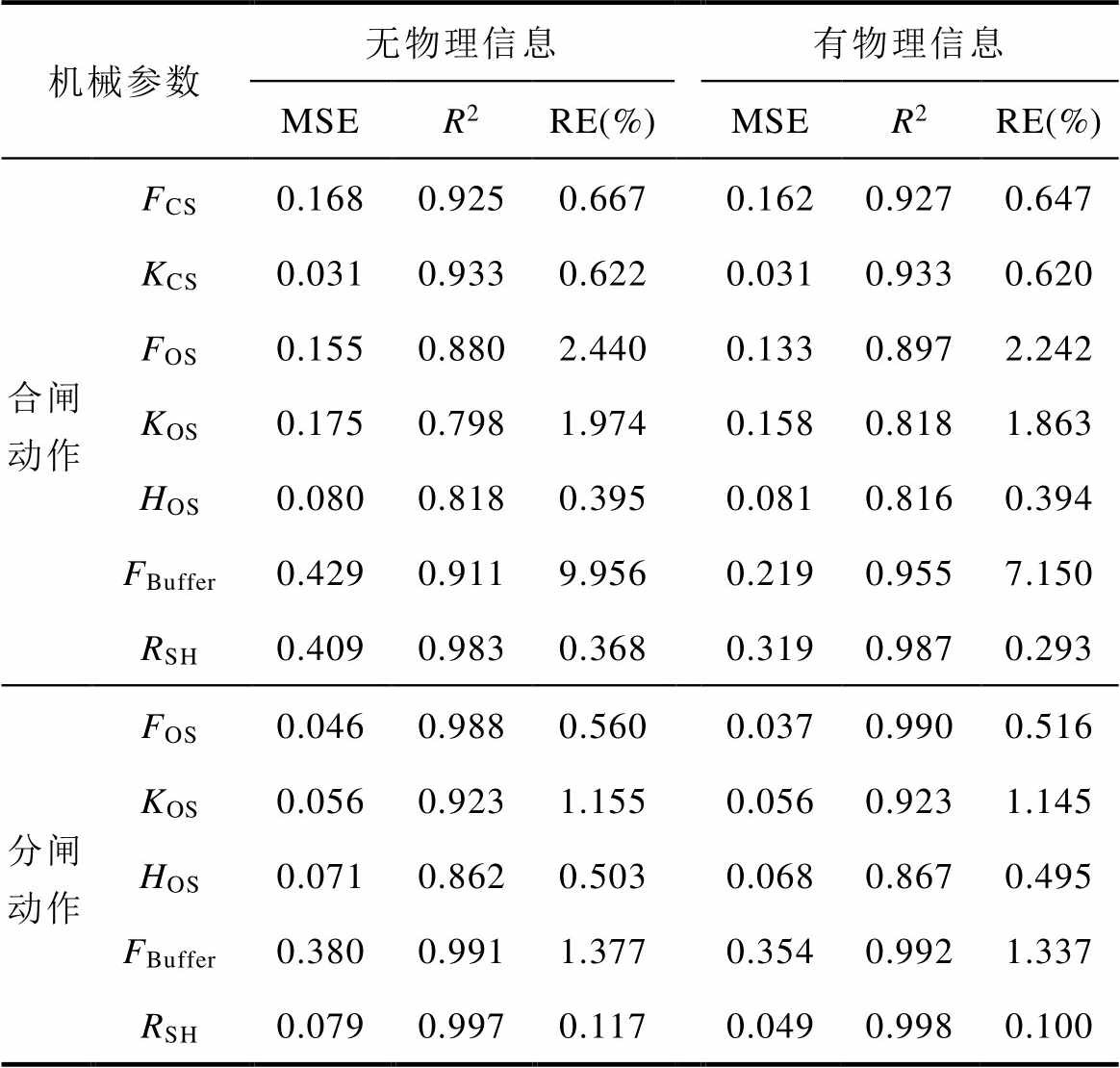
机械参数无物理信息有物理信息 MSER2RE(%)MSER2RE(%) 合闸动作FCS0.1680.9250.6670.1620.9270.647 KCS0.0310.9330.6220.0310.9330.620 FOS0.1550.8802.4400.1330.8972.242 KOS0.1750.7981.9740.1580.8181.863 HOS0.0800.8180.3950.0810.8160.394 FBuffer0.4290.9119.9560.2190.9557.150 RSH0.4090.9830.3680.3190.9870.293 分闸动作FOS0.0460.9880.5600.0370.9900.516 KOS0.0560.9231.1550.0560.9231.145 HOS0.0710.8620.5030.0680.8670.495 FBuffer0.3800.9911.3770.3540.9921.337 RSH0.0790.9970.1170.0490.9980.100
将模型有无物理约束时获得的分合闸弹簧力学参数辨识结果代入力学方程进行计算,用MSE衡量其与辨识值间的偏差,从而进行弹簧力学参数辨识结果的物理一致性对比,结果如图11所示。可以看出,相比于无物理约束模型,有物理约束模型的参数辨识结果代入力学方程验证后,其计算结果与模型辨识值之间的MSE显著减小,相对减小幅度在57.19%~74.69%之间。因此,物理约束大幅提高了弹簧力学参数辨识结果的物理一致性,使模型获得的弹簧参数更符合力学规律。
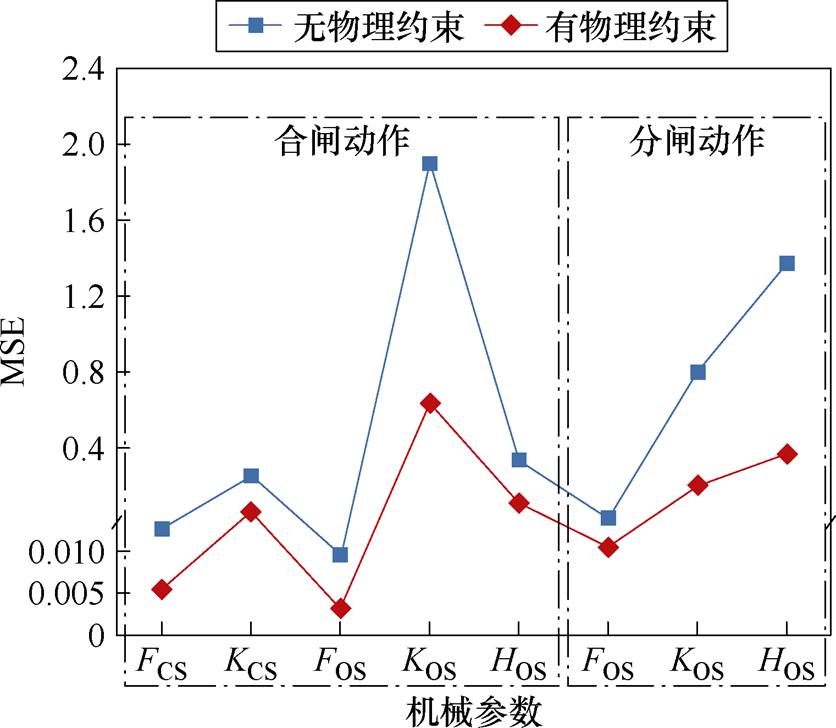
图11 弹簧力学参数辨识结果的物理一致性对比
Fig.11 Physical consistency comparison of identification results of spring mechanical parameters
3.3.2 DCT-P迁移性能评估
DCT-P的模型性能随训练循环次数的变化如图12所示,共有特征学习网络完成200个训练循环后,特有特征学习网络开始训练。可以看出,经过模型迁移,在训练起始阶段,特有特征学习网络的训练损失低于共有特征学习网络,在验证集上的MSE更小、R2更趋近于1。特有特征学习网络有效迁移了共有特征学习网络所获得的知识,加速了模型的训练进程,提升了模型的训练效果。
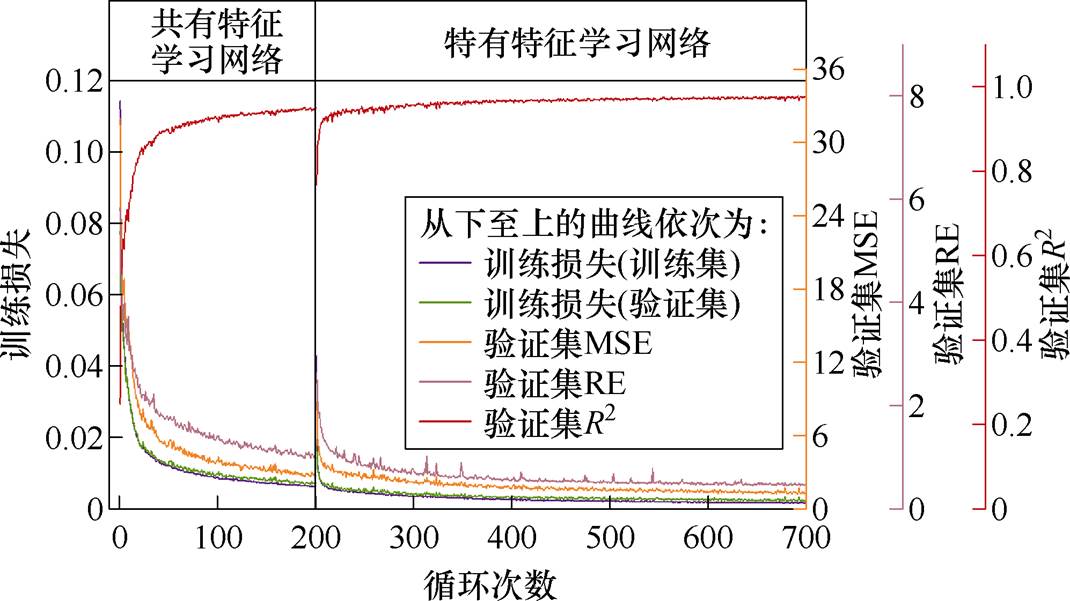
图12 DCT-P性能随训练次数的变化
Fig.12 Variation of DCT-P performance with the number of training iterations
共有特征学习网络和DCT-P对机械参数辨识结果的影响如图13所示。经过特有特征网络的学习,各机械参数的辨识精度提升,且机械参数间辨识效果的差异性下降。特有特征网络对各机械参数辨识效果的提升程度不同,说明了模型对各机械参数的敏感性不同,利用特有特征学习网络加强特定特征的知识提取是必要的。
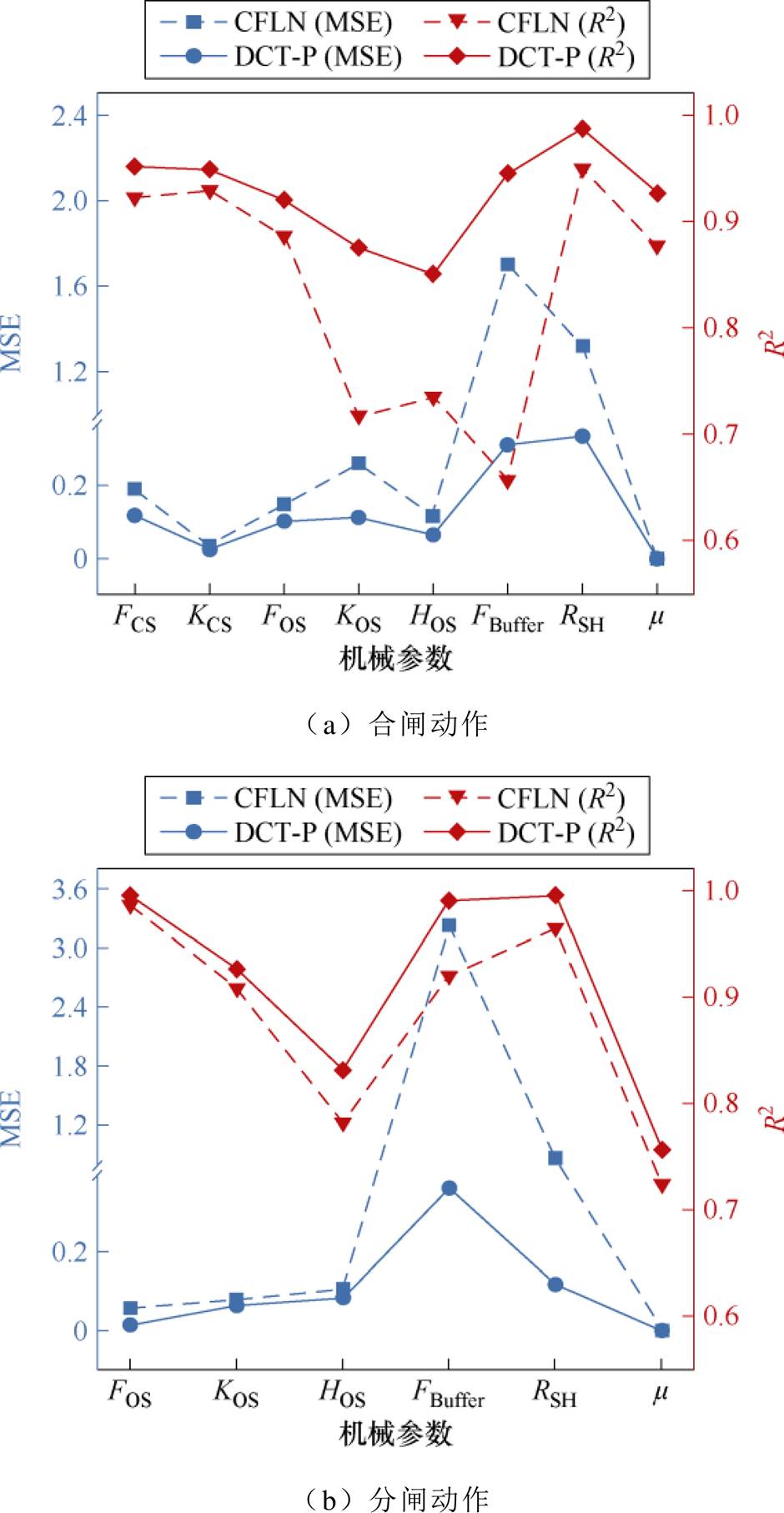
图13 CFLN与DCT-P的网络性能对比
Fig.13 Performance comparison between CFLN and DCT-P
3.3.3 DCT-P模型的鲁棒性分析
用于获取机构行程曲线的压电式传感器在工作环境或自身特性下可能会受到噪声影响,引起测量误差。为模拟噪声对模型性能的影响,对操动机构机械状态数据集获取的行程曲线添加高斯噪声,在数据处理模块加入高斯滤波过程。
有无噪声条件下,DCT-P模型在测试集上的评价指标及其标准差如图14所示。可以看出,加入噪声后,模型对测试集的辨识精度和稳定性有所下降。除机构卡涩系数以外,合闸样本和分闸样本机械参数辨识的相对误差低于7.55%和2.09%,平均值为2.64%和1.21%,仍具有较高的辨识精度。噪声影响下,机构卡涩系数的辨识准确度下降,主要原因和卡涩系数处于较低数量级相关,由于其数值较小,微小的变化即会引起较大相对误差。此外,增加训练模型的样本数量可以降低噪声对模型性能的影响。
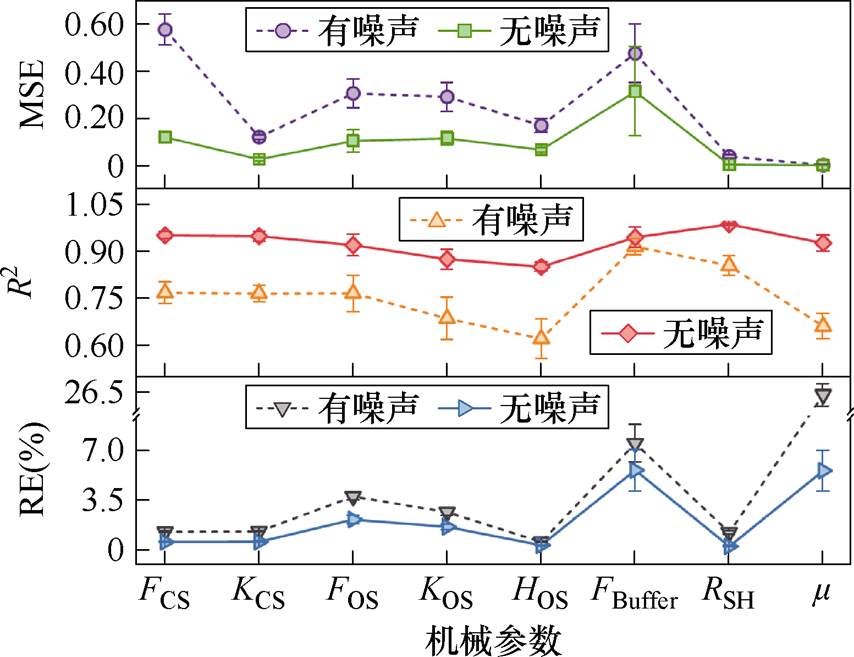
(a)合闸动作
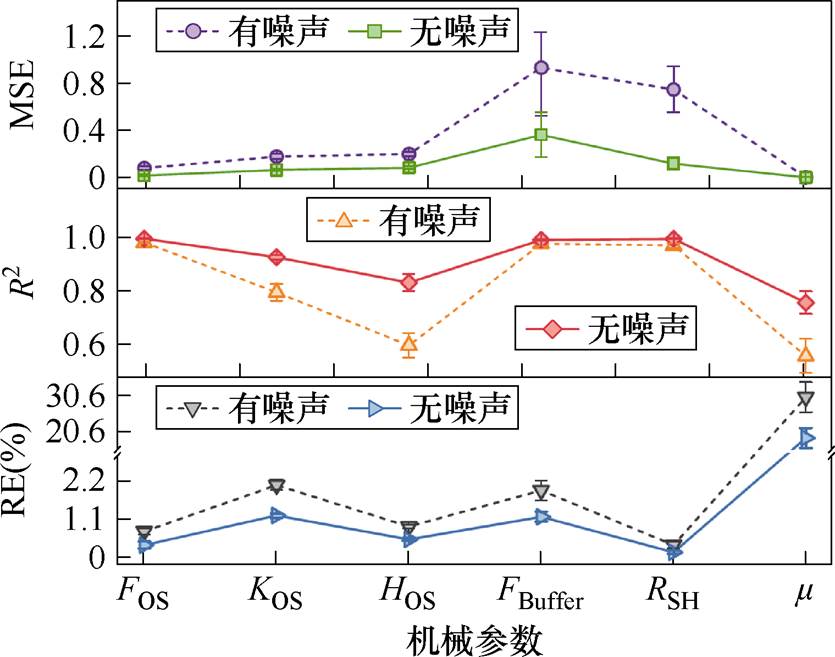
(b)分闸动作
图14 噪声对模型性能的影响
Fig.14 The impact of noise on model performance
本文通过数据和物理信息双驱动的方式,提出一种基于DCT-P迁移网络的高压断路器弹簧操动机构机械参数辨识模型,为操动机构的机械故障诊断和溯源提供参考。主要结论如下:
1)本文基于一维卷积神经网络和多头注意力机制构建的DCT-P迁移网络,可以实现弹簧操动机构关键部件合闸弹簧、分闸弹簧、油缓冲器、拐臂轴孔磨损和机构卡涩相关机械参数的准确辨识。基于操动机构运动原理及机械特性,将物理信息嵌入网络学习框架,能够增强机械参数辨识结果的物理一致性,提升模型对机械参数的辨识性能。
2)所提模型对操动机构关键机械参数的辨识相对误差最低达到0.15%。在复合故障下,基于DCT-P的机械参数辨识结果,对各部件状态单独诊断的准确率达到93%以上,同时诊断多个部件状态的准确率达到89%以上。此外,在噪声影响下,本文所提方法对于机械参数辨识相对误差的标准差平均仅增加0.11,仍具有鲁棒性。
参考文献
[1] 盛戈皞, 钱勇, 罗林根, 等. 面向新型电力系统的数字化电力设备关键技术及其发展趋势[J]. 高电压技术, 2023, 49(5): 1765-1778.
Sheng Gehao, Qian Yong, Luo Lingen, et al. Key technologies and development trends of digital power equipment for new type power system[J]. High Voltage Engineering, 2023, 49(5): 1765-1778.
[2] 阎光伟, 张云馨, 符哲源, 等. 基于改进集合预测网络的输变电设备故障知识图谱构建方法[J]. 电工技术学报, 2025, 40(15): 4976-4987.
Yan Guangwei, Zhang Yunxin, Fu Zheyuan, et al. The construction method of fault knowledge graph for transmission and transformation equipment based on improved set prediction network[J]. Transactions of China Electrotechnical Society, 2025, 40(15): 4976- 4987.
[3] Janssen A, Makareinis D, Sölver C E. International surveys on circuit-breaker reliability data for substation and system studies[J]. IEEE Transactions on Power Delivery, 2014, 29(2): 808-814.
[4] 国网山东省电力公司运维检修部组. 山东电网开关设备典型故障分析与预防: 2006~2015年[M]. 北京: 中国电力出版社, 2017.
[5] 董华军, 孙鹏, 李东恒, 等. 考虑电动斥力的真空断路器刚柔耦合系统机械特性研究[J]. 电机与控制学报, 2023, 27(3): 147-157.
Dong Huajun, Sun Peng, Li Dongheng, et al. Research on structural characteristics of rigid-flexible coupling system of VCB considering electro-dynamic repulsion force[J]. Electric Machines and Control, 2023, 27(3): 147-157.
[6] 刘会兰, 许文杰, 赵书涛, 等. 面向高压断路器故障分类的电流-振动信号类聚几何敏感特征优选方法[J]. 电工技术学报, 2023, 38(1): 26-36.
Liu Huilan, Xu Wenjie, Zhao Shutao, et al. Opti- mization method of clustering geometric sensitive features of current vibration signals for fault classification of high voltage circuit breakers[J]. Transactions of China Electrotechnical Society, 2023, 38(1): 26-36.
[7] 韩翔宇, 纽春萍, 何海龙, 等. 电磁式断路器状态监测与智能评估技术综述[J]. 电工技术学报, 2023, 38(8): 2191-2210.
Han Xiangyu, Niu Chunping, He Hailong, et al. Review of condition monitoring and intelligent assessment of electromagnetic circuit breaker[J]. Transactions of China Electrotechnical Society, 2023, 38(8): 2191-2210.
[8] 李建鹏, 赵冀宁, 孟延辉, 等. 高压断路器操动机构非侵入式多信息检测及故障诊断研究[J]. 高压电器, 2024, 60(7): 128-137.
Li Jianpeng, Zhao Jining, Meng Yanhui, et al. Research on non-invasive multi-information detection and fault diagnosis for operating mechanism of high voltage circuit breaker[J]. High Voltage Apparatus, 2024, 60(7): 128-137.
[9] Ma Li, Wang Guodong, Zhang Pei, et al. Fault diag- nosis method of circuit breaker based on CEEMDAN and PSO-GSA-SVM[J]. IEEJ Transactions on Elec- trical and Electronic Engineering, 2022, 17(11): 1598-1605.
[10] 刘会兰, 常庚垚, 赵书涛, 等. 溯源弹簧形变过程的断路器振动信号递归量化分析辨识方法[J]. 电工技术学报, 2024, 39(8): 2567-2577.
Liu Huilan, Chang Gengyao, Zhao Shutao, et al. Circuit breaker state identification method based on tracing spring deformation process and recurrence quantitative analysis of vibration signals[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(8): 2567-2577.
[11] 范兴明, 许洪华, 张思舜, 等. 基于改进蜣螂优化算法深度混合核极限学习机的高压断路器故障诊断[J]. 电工技术学报, 2025, 40(12): 3994-4003.
Fan Xingming, Xu Honghua, Zhang Sishun,et al. Fault diagnosis of high voltage circuit breaker based on improved dung beetle optimizer algorithm deep hybrid kernel extreme learning machine[J]. Transactions of China Electrotechnical Society, 2025, 40(12): 3994- 4003.
[12] Cao Shi, Zhao Tong, Wang Gang, et al. A mechanical defect localization and identification method for high- voltage circuit breakers based on the segmentation of vibration signals and extraction of chaotic features[J]. Sensors, 2023, 23(16): 7201.
[13] 马莉, 霍耀佳, 吴杨, 等. 基于VMD和KFCM-SVM的高压断路器声振联合故障诊断方法[J]. 高压电器, 2024, 60(8): 53-62.
Ma Li, Huo Yaojia, Wu Yang, et al. Acoustic and vibration joint fault diagnosis method of high voltage circuit breaker based on VMD and KFCM-SVM[J]. High Voltage Apparatus, 2024, 60(8): 53-62.
[14] 牛博, 王雪莉, 吴兵, 等. 基于运动轨迹检测与支持向量机的高压断路器机械缺陷诊断方法[J]. 高压电器, 2024, 60(8): 29-36.
Niu Bo, Wang Xueli, Wu Bing, et al. Mechanical defect detection method of high voltage circuit breaker based on motion trajectory detection and support vector machine[J]. High Voltage Apparatus, 2024, 60(8): 29-36.
[15] 郑悦, 姚瑛, 晋萃萃, 等. 基于MSMOTE与FA-CNN- LSTM的断路器故障诊断[J]. 光电子·激光, 2025, 36(4): 421-428.
Zheng Yue, Yao Ying, Jin Cuicui, et al. Fault diagnosis of circuit breakers based on MSMOTE and FA-CNN-LSTM[J]. Journal of Optoelectronics·Laser, 2025, 36(4): 421-428.
[16] Ye Xinyu, Yan Jing, Wang Yanxin, et al. A novel U-Net and capsule network for few-shot high-voltage circuit breaker mechanical fault diagnosis[J]. Measure- ment, 2022, 199: 111527.
[17] Ye Xinyu, Yan Jing, Wang Yanxin, et al. A novel capsule convolutional neural network with attention mechanism for high-voltage circuit breaker fault diagnosis[J]. Electric Power Systems Research, 2022, 209: 108003.
[18] 王艳新, 闫静, 王建华, 等. 基于域对抗迁移卷积神经网络的小样本GIS绝缘缺陷智能诊断方法[J]. 电工技术学报, 2022, 37(9): 2150-2160.
Wang Yanxin, Yan Jing, Wang Jianhua, et al. Intelligent diagnosis for GIS with small samples using a novel adversarial transfer learning in convolutional neural network[J]. Transactions of China Electro- technical Society, 2022, 37(9): 2150-2160.
[19] 叶远波, 王吉文, 邵庆祝, 等. 配电网故障识别Transformer-联邦迁移学习算法设计[J/OL]. 电力系统及其自动化学报, 2025: 1-10. (2025-02-17). https:// link.cnki.net/doi/10.19635/j.cnki.csu-epsa.001590.
Ye Yuanbo, Wang Jiwen, Shao Qingzhu, et al. Transformer-federation transfer learning algorithm design for distribution network fault recognition[J/OL]. Proceedings of the CSU-EPSA, 2025: 1-10. (2025- 02-17). https://link.cnki.net/doi/10.19635/j.cnki.csu- epsa.001590.
[20] Raissi M, Perdikaris P, Karniadakis G E. Physics- informed neural networks: a deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations[J]. Journal of Computational Physics, 2019, 378: 686-707.
[21] 李湘, 陈思远, 张俊, 等. 基于物理信息嵌入的非固定长度电力系统暂态稳定快速评估[J]. 上海交通大学学报, 2025, 59(7): 962-970.
Li Xiang, Chen Siyuan, Zhang Jun, et al. Physics- informed fast transient stability assessment of non- fixed length in power systems[J]. Journal of Shanghai Jiao Tong University, 2025, 59(7): 962-970.
[22] 彭长志, 董旭柱, 阮江军, 等. 基于物理信息神经网络的短间隙流注放电模拟[J]. 高压电器, 2023, 59(9): 90-97.
Peng Changzhi, Dong Xuzhu, Ruan Jiangjun, et al. Short-gap streamer discharge simulation based on physics-informed neural network[J]. High Voltage Apparatus, 2023, 59(9): 90-97.
[23] Vaswani A. Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30.
[24] Xu Shuo, An Xin, Qiao Xiaodong, et al. Multi-output least-squares support vector regression machines[J]. Pattern Recognition Letters, 2013, 34(9): 1078- 1084.
[25] Bardos A, Mylonas N, Mollas I, et al. Local interpretability of random forests for multi-target regression[M]//Machine Learning and Principles and Practice of Knowledge Discovery in Databases. Cham: Springer Nature Switzerland, 2025: 38-45.
[26] Yu Z, Zhu M, Trapp M, et al. Leveraging pro- babilistic circuits for nonparametric multi-output regression[C]//Proceedings of the Thirty-Seventh Conference on Uncertainty in Artificial Intelligence, PMLR, 2021: 2008-2018.
[27] Mcclenny L, Haile M, Attari V, et al. Deep multi- modal transfer-learned regression in data-poor domains[J]. 2020, DOI:10.48550/arXiv.2006.09310.
Abstract The new power system places high demands on the stable operation and condition monitoring of power equipment. The mechanical state of the operating mechanism of the high-voltage circuit breaker (HVCB) is crucial for ensuring the safe and stable operation of both the equipment and the power grid. Currently, the primary technical approaches to mechanical status recognition of the operating mechanism focus on identifying fault types. However, the fault state of the operating mechanism is typically caused by the combined effect of multiple components. Quantitative acquisition of mechanical parameters for key components provides a strong foundation for evaluating their states and the overall operating mechanism. This paper proposes a novel transfer network, a dual-stage convolution-transformer network with physical information (DCT-P), to identify the mechanical parameters of the closing spring, opening spring, buffer, wear level of crank arm shaft hole, and jamming conditions.
The DCT-P comprises a common feature learning network (CFLN) and a specific feature learning network (SFLN), both based on a one-dimensional convolutional neural network and a multi-head attention mechanism. CFLN and SFLN extract common knowledge between mechanical features and mechanical parameters, as well as specific knowledge related to individual mechanical parameters, respectively. In addition, based on the dynamic properties of the operating mechanism, a physics-informed loss function is defined, and a sample-weighting strategy is introduced. By learning the DCT-P, features in stroke curves and mechanical parameters can be captured.
Datasets of the mechanical characteristics of the operating mechanism are established using the mechanical characteristic simulation model. Numerical experimental results show that, compared with other models, the DCT-P model achieves superior and more balanced identification accuracy for mechanical parameters. The impact of physical information on the identification performance of DCT-P reveals that, compared to the case without physical details, the introduction of physical information reduces the mean square error and relative error by an average of 13.82% and 7.80% in the MSE and RE, respectively, while the R² obtains a relative increase of 0.89% on average. The integration of spring mechanical equations significantly enhances the physical consistency of the identified spring performance parameters. Additionally, the DCT-P model exhibits robustness to noise.
The following conclusions can be derived. (1) The DCT-P model can accurately identify the mechanical parameters of the key components in the spring operating mechanism of HVCB, with the minimum identification error reaching 0.15%. (2) Incorporating physical information into the network can improve the performance of the model and enhance the physical consistency of the identified mechanical parameters. (3) For the composite faults, based on the mechanical parameter identification results from the DCT-P model, the accuracy of simultaneously diagnosing the states of multiple components exceeds 89%. The proposed model effectively provides data support for fault diagnosis of the operating mechanism and status evaluation of key components.
keywords:High-voltage circuit breaker, spring operating mechanism, identification of mechanical parameter, transfer learning, physics-informed
DOI: 10.19595/j.cnki.1000-6753.tces.250521
中图分类号:TM561; TP18
国家电网有限公司科技资助项目(5500-202199527A-0-5-ZN)。
收稿日期 2025-04-01
改稿日期 2025-04-18
赵陈琛 女,1998年生,博士研究生,研究方向为电力设备数字孪生和智能故障诊断。E-mail: cc.zhao@stu.xjtu.edu.cn
张国钢 男,1976年生,博士,教授,研究方向为智能电器理论与工程、储能与新能源电力系统和电弧等离子体与电接触。E-mail: ggzhang@mail.xjtu.edu.cn(通信作者)
(编辑 崔文静)