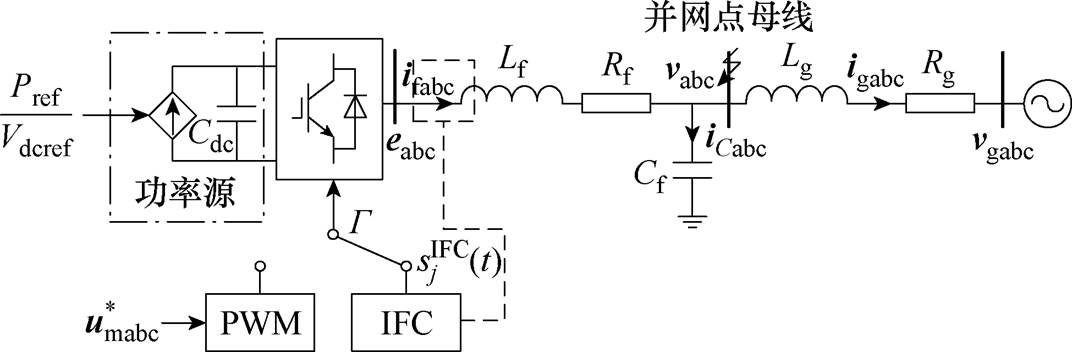
图1 直流电压同步构网型换流器拓扑
Fig.1 The topology of DC-link voltage grid-forming converter
摘要 随着高比例可再生能源装机容量的增加,构网型换流器的同步稳定能力对电力系统的同步稳定性影响日益显著。当系统发生如电压重度跌落、大容量负荷投入和接地故障等大扰动时,故障电流会急剧增大,进而对电力电子设备和系统稳定性造成威胁。因此对故障电流的有效限制是保证电力系统稳定运行的关键措施之一。然而,传统的电流限幅控制策略减少了故障期间的功角减速面积,削弱了构网型换流器的同步稳定能力。针对此问题,该文创新性地提出了一种基于改进漏斗控制的换流器故障电流限制策略。与传统的漏斗控制不同,该文通过合理设计漏斗边界,能够使系统在对称故障和不对称故障期间,有效地维持故障电流的三相对称性。同时,故障电流幅值能够限制在0.8~1.1(pu),使得构网型换流器具备良好的同步稳定能力。通过理论分析证明了所提限流策略的有界性,基于实时数字仿真系统的硬件在环实验验证了所提策略的有效性。
关键词:构网型换流器 直流电压同步控制 电流限幅 漏斗控制
针对传统跟网型换流器在弱电网下适应性差且对交流电网支撑能力弱等问题,高比例可再生能源并网电力系统对构网型换流器的需求剧增。构网型换流器通过给定换流器输出电压的幅值与相位,对外呈现电压源特性,可广泛应用于可再生能源发电领域[1-3]。然而,当构网型换流器面对大扰动故障时,其限流能力和故障穿越能力却是有限的[1-4]。目前,电流限制算法主要分为三种,以d轴主导的电流饱和算法(Current Saturation Algorithm, CSA)、虚拟阻抗(Virtual Impedance, VI)算法和基于切换控制的虚拟电阻(Virtual Resistor, VR)控制[5]。
首先是以d轴为主导的电流饱和算法,其结构简单易于实现,是应用最为广泛的一种限流策略[6]。这种算法通过限制故障过程中的dq轴电流参考值达到限流的目的。最早的电流饱和算法通过在电流环前直接加限幅实现,但由于这种直接限幅方式没有考虑dq轴优先级,容易引起暂态失稳[7]。d轴主导的电流饱和算法在文献[8]中提出,考虑dq轴耦合作用,以优先稳定有功功率为目的,将q轴电流参考值的限幅设计成由d轴电流决定。这种方法能够在对称故障过程中将故障电流限制在1.3(pu)左右,但极大地削弱了暂态功角中的减速面积,稳定裕度下降,这将导致极限切除时间(Critical Clearing Time, CCT)的减少[9-11]。文献[12-13]研究了电流限幅环节对不同类型换流器暂态稳定能力的影响,并指出采用电流限幅环节会影响换流器在故障期间的运行特性。同时,最近的研究表明,电流饱和时选择的相位会影响系统的限流能力和故障恢复能力。文献[13]通过最优化算法寻找最优功率因素角(Power Actor Angle, PAA),但在不同系统中,最优功率因素角不同,难以快速确定。基于CSA的电流限幅控制方法虽然具有结构简单、易于实现的优点,但在系统进行故障穿越时,电流饱和现象可能会对系统稳定性产生不利影响。此外,电流饱和瞬间的冲击电流可能高达2~3倍额定值,这容易导致电力电子设备被击穿。
VI算法通过在电压环中引入虚拟的电阻电抗,增大线路上的限流能力,能够对电流进行实时快速地限制[14]。但是VI算法不能保证将故障电流限制在安全范围内,因此其通常需配合功率同步算法使用[15]。这种功率同步算法通过在故障过程中降低功率参考值,减少功角曲线中的加速面积来提高暂态稳定性,但是这类方法仅适用于虚拟同步机等构网型控制中[16-21]。文献[19]在虚拟同步机构网型换流器中引入自适应虚拟阻抗控制,提高换流器的故障穿越能力。文献[20]将d轴主导的CSA和VI算法进行对比,指出CSA具有较好的限流能力,但是故障耐受能力被削弱,VI算法虽然有着较好的故障耐受能力,但在故障过程中出现过电流。文献[21]根据电压跌落曲线设计VI数值,电压跌落越深,虚拟阻抗值越大,以此来实现故障电流限流的目的。与CSA相比,VI算法虽然不会削弱系统的同步稳定能力,但电流限幅能力不如CSA。
此外,基于切换控制的限流算法也被应用到构网型换流器上。文献[22]设计了一个在故障过程中切换至变虚拟电阻的算法,故障电流越大,虚拟电阻越大,限流效果越明显,但当电压发生重度跌落时,这种方法限流效果有限。文献[23]设计了一套基于比例谐振控制的故障冲击电流抑制策略。但是以上方法仅对于对称故障进行研究和分析,对于不对称故障的抑制能力尚未研究。
由三相短路接地等引起的对称故障会产生极大的故障电流幅值。在此情况下,工程上要求换流器需要具备耐受0.2 s的故障持续时间[4],这对于仅加入电流饱和算法是一种挑战。另外,由单相接地和两相短路引起的不对称故障,会产生负序和零序电流,导致设备过热、电压不对称,进而影响电能质量,甚至还会引起系统保护误动以及系统解列。文献[24]研究了虚拟同步机构网型控制下的对称和不对称故障的限流措施。目前的主流方法是考虑在不对称故障过程中注入负序分量,而CSA、VI算法等限流方法对于不对称故障适用能力较弱。
针对上述问题,本文首先分析了CSA与VR限流算法对构网型换流器的暂态稳定性的影响。其次,为了能够同时抑制对称和不对称故障,本文设计了基于改进漏斗控制(Improved Funnel Control, IFC)的故障电流限流算法,该算法能够将构网换流器的故障电流幅值限制在0.8~1.1(pu),与传统CSA相比,有着更强的限流能力,并且无需考虑PAA。同时,IFC算法还适用于对称故障和不对称故障,在对称故障下不出现过电流且不影响换流器的暂态稳定能力,在不对称故障下能够将不对称故障电流限制成三相对称电流,提升变流器的故障穿越能力。另外,本文还基于逻辑控制设计了一套切换策略,基于故障过电流和故障清除后电压恢复这两种状态,准确地识别故障的发生与清除,实现限流模式的切换。本文所提出的控制策略简单易实施,无需改变现有构网型换流器控制结构。最后,通过仿真和半实物实验验证了所提限流策略的有效性。
直流电压同步构网型换流器拓扑如图1所示。直流侧采用恒定功率源Pref作为输入,交流侧通过LC型滤波器滤波,经过传输线路接入电网。图1中,Vdcref为直流电压参考值,ifabc为换流器出口处三相滤波电流,vabc为并网点母线处三相电压,igabc为电网侧三相电流,eabc为换流器出口处三相电压,Lf和Rf分别为滤波电感和滤波电阻,Cf为滤波电容,Lg和Rg分别为传输线路等值电感与等值电阻。
图1 直流电压同步构网型换流器拓扑
Fig.1 The topology of DC-link voltage grid-forming converter
直压同步构网型换流器控制框图如图2所示。图2中,主要控制回路包括电压内环、电流内环和直流电压同步环;Kpv、Kiv分别为电压内环PI控制器的比例和积分系数;Kpi、Kii分别为电流内环PI控制器的比例和积分系数;Kpac和Kiac分别为交流电压控制环的比例和积分系数;Ki为直流电压同步环积分系数。“—”代表变量以标幺值形式给出; 为控制器输出的三相参考电压;
为控制器输出的三相参考电压; 为送入调制环节前的三相参考电压;Rv和Lv分别为虚拟电阻和虚拟电感。系统考虑了d轴主导的电流限幅、虚拟阻抗以及基于切换策略的虚拟电阻。基于直流电压同步的构网型换流器利用直流电容Cdc的充放电动态特性来模拟同步机的转子特性。因此,这种控制能够在维持直流电压恒定的同时,还能向电网提供惯量支撑。
为送入调制环节前的三相参考电压;Rv和Lv分别为虚拟电阻和虚拟电感。系统考虑了d轴主导的电流限幅、虚拟阻抗以及基于切换策略的虚拟电阻。基于直流电压同步的构网型换流器利用直流电容Cdc的充放电动态特性来模拟同步机的转子特性。因此,这种控制能够在维持直流电压恒定的同时,还能向电网提供惯量支撑。
大扰动下的系统等效模型如图3所示,构网型换流器输出具有电压源特性,在功角暂态分析中,输出的有功功率Pm和无功功率Qm仅由输出电压和并网点母线电压决定,即

图2 直压同步构网型换流器控制框图
Fig.2 The control scheme of DC-link voltage grid-forming converter
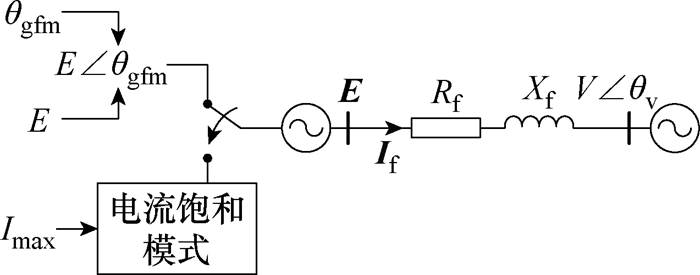
图3 大扰动下的系统等效模型
Fig.3 The system equivalent model under large disturbance
 (1)
(1)
式中,E为换流器出口电压eabc的有效值;V为并网点母线电压vabc的有效值;If为滤波电流有效值;Xf为滤波电抗; 为实际功角,
为实际功角, ,即变流器出口端电压与并网点母线电压之间的相位差,
,即变流器出口端电压与并网点母线电压之间的相位差, 为图2中直压同步控制生成的相位,
为图2中直压同步控制生成的相位, 为并网点电压矢量角;conj(·)表示共轭运算。忽略滤波电阻,进一步得到
为并网点电压矢量角;conj(·)表示共轭运算。忽略滤波电阻,进一步得到
 (2)
(2)
式中, 。
。
图2中,dq轴优先的电流饱和算法表达式[8, 25]为
 (3)
(3)
式中, 和
和 分别为d、q轴电流饱和算法的输入;
分别为d、q轴电流饱和算法的输入; 和
和 分别为d、q轴电流饱和算法的输出;Imax为最大允许电流幅值,为了保证电压内环在正常状态时稳定运行,其值一般设置在1.3~1.5(pu)之间。
分别为d、q轴电流饱和算法的输出;Imax为最大允许电流幅值,为了保证电压内环在正常状态时稳定运行,其值一般设置在1.3~1.5(pu)之间。
在本文中,当换流器的电流幅值达到Imax时,电流受电流饱和算法的限制,电流幅值维持在Imax,对外等效于电流源,此时换流器运行在电流饱和模式;当电流幅值小于Imax时,此时换流器运行在非饱和模式。如图3所示,当换流器运行在电流饱和模式时,不考虑功率因素角的影响,换流器输出的有功功率Pmsat表达式为
 (4)
(4)
与式(2)相比,电流饱和时的功角特性曲线滞后于非饱和时的功角特性90°。增加电流限幅环节时的功角特性曲线如图4所示。
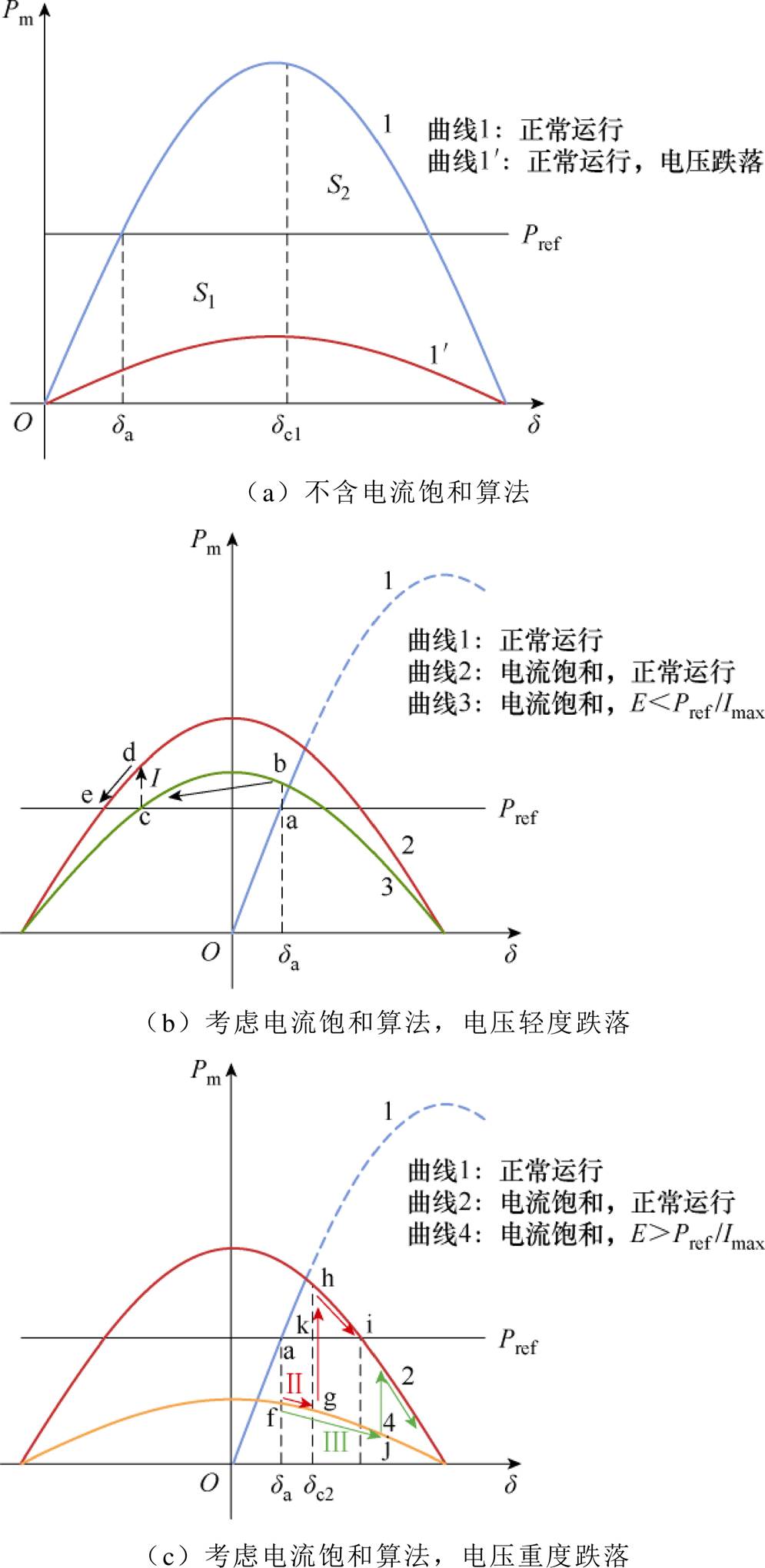
图4 加入电流饱和算法后的功角特性曲线
Fig.4 The power angle curves of system with CSA
系统在并网点母线处发生大扰动故障,当不采用电流饱和算法时,大扰动故障期间功角特性如图4a所示。由于直流电压同步构网型控制是二阶构网型,根据等面积法则,当加速面积S1等于减速面积S2时,系统能够在大扰动中恢复,极限切除角为 。
。
当控制系统加入电流饱和算法后,其大扰动下的功角特性如图4b和图4c所示。图4b中,在平衡点a时,电压在 时发生轻度跌落,即E<Pref/Imax。工作点由a点突变至b点,此时Pm>Pref,功角开始减速至c点,如路径Ⅰ所示。当扰动切除后,电压上升,此时工作点从c点变到d点,最后减速至工作点e点。由于此时与曲线1无交点,系统仍处于电流饱和状态运行,对外呈现电流源特性,因此工作点e点并不是理想工作点。
时发生轻度跌落,即E<Pref/Imax。工作点由a点突变至b点,此时Pm>Pref,功角开始减速至c点,如路径Ⅰ所示。当扰动切除后,电压上升,此时工作点从c点变到d点,最后减速至工作点e点。由于此时与曲线1无交点,系统仍处于电流饱和状态运行,对外呈现电流源特性,因此工作点e点并不是理想工作点。
当系统受到大扰动导致电压发生重度跌落时,功角特性曲线如图4c所示。系统在平衡点a发生大扰动,此时工作点由a点跳变至f点。如路线Ⅱ所示,当加速面积Safgk等于减速面积Skhi时,功角到i点时功角速度为0,系统临界稳定,此时极限切除角为 。当Safgk<Skhi时,系统功角能够成功减速并回到曲线1与曲线2的交点,此时系统能够退出电流饱和模式并恢复理想的运行状态运行。当Safgk>Skhi时,如路线Ⅲ所示,故障切除后系统功角会超过i点,并沿着电流饱和曲线2持续加速,发生功角失稳,系统无法恢复稳定。对比加入电流饱和算法后的极限切除角,可以得到
。当Safgk<Skhi时,系统功角能够成功减速并回到曲线1与曲线2的交点,此时系统能够退出电流饱和模式并恢复理想的运行状态运行。当Safgk>Skhi时,如路线Ⅲ所示,故障切除后系统功角会超过i点,并沿着电流饱和曲线2持续加速,发生功角失稳,系统无法恢复稳定。对比加入电流饱和算法后的极限切除角,可以得到 ,极限切除角明显减小。因此,系统在加入电流饱和算法后,耐受大、扰动能力减弱,其暂态稳定能力受到影响。
,极限切除角明显减小。因此,系统在加入电流饱和算法后,耐受大、扰动能力减弱,其暂态稳定能力受到影响。
与传统虚拟阻抗方法不同,为了实现快速过电流抑制,采用虚拟电阻Rv对换流器调制电压参考值进行修正,如图2所示。与电流饱和算法不同,虚拟电阻的引入,不会影响电压环在故障过程中的运行特性,即电流环参考值在故障过程中仍由电压环决定,保证了系统故障穿越能力不会被削弱。
同时,为了实现对瞬时过电流的抑制,虚拟电阻Rv在文献[22]中被设计成电流偏差的比例值,表达式为
 (5)
(5)
式中,If为滤波电流的幅值;Ilim为故障电流幅值,Ilim=1.3;k为虚拟电阻比例系数,参考文献[22],本文取k=2。式(5)表示,故障电流越大,虚拟电阻值Rv越大,限流能力越强。在图1所示的单机无穷大系统中仅采用图2中的虚拟电阻限流策略,Matlab/Simulink仿真结果如图5所示。
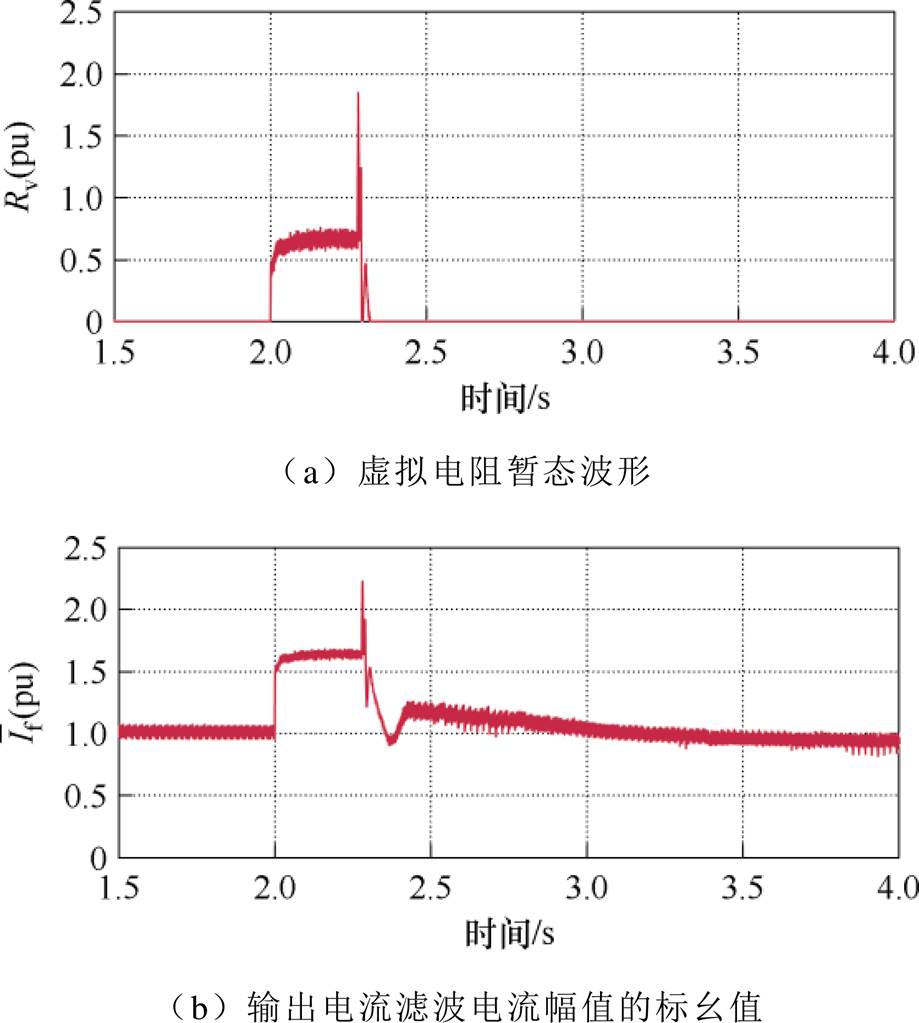
图5 虚拟电阻限流策略的暂态稳定波形
Fig.5 The transient stability waveforms of the test system with virtual resistor current limit strategy
系统的并网点母线在2 s时发生一个持续时间为0.28 s的三相短路接地故障。如图5所示,虚拟电阻Rv能够随故障电流幅值的增大而增加,暂态特性良好。虽然Ilim取值为1.3,在面对极端故障如三相短路接地时,故障电流幅值仍超过1.5(pu),容易造成电力电子设备的击穿。同时,在故障后期也发生了过电流,此现象与文献[20]中发现的结论一致。
通过第1节的机理分析表明,传统电流饱和算法在实现限制故障电流的同时,会显著减少功角曲线中的减速面积,从而导致换流器故障穿越期间暂态稳定裕度下降。虚拟阻抗类控制策略虽能通过动态调节实现故障电流的快速抑制,并在暂态过程中保持同等稳定裕度,但其电流限幅能力存在显著缺陷。另外,上述两类方法均没有考虑对称、不对称故障电流的限制。值得注意的是,以上方法均未构建负序电流抑制机制,导致不对称故障时将出现过电流,严重威胁设备绝缘安全。
综上所述,考虑到漏斗控制能够对被控量准确跟踪参考值,跟踪误差灵活可控,此时故障过程中电流参考值只需要考虑正序分量[26]。因此,本文设计了一套基于改进漏斗控制的故障电流限制策略和切换控制策略,能够在无需考虑注入负序电流分量的情况下同时抑制对称故障电流和不对称故障电流,并且保持故障过程中电流幅值维持在0.8~1.1(pu)的安全运行范围内。
在图1三相对称电路中,滤波电流ifabc、滤波电容电压vabc和电网电流igabc的动态特性方程为
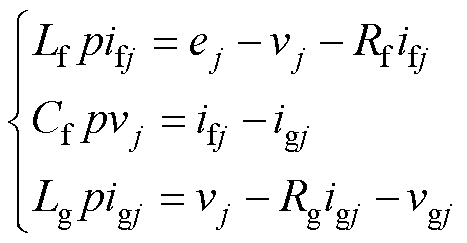 (6)
(6)
式中,p为一阶微分因子;ifj、igj、vj、ej为第j相的滤波及电网电流、电压,j=a, b, c。在对称三相构网型换流器中,式(6)可以表示成状态方程和输出方程的形式,即
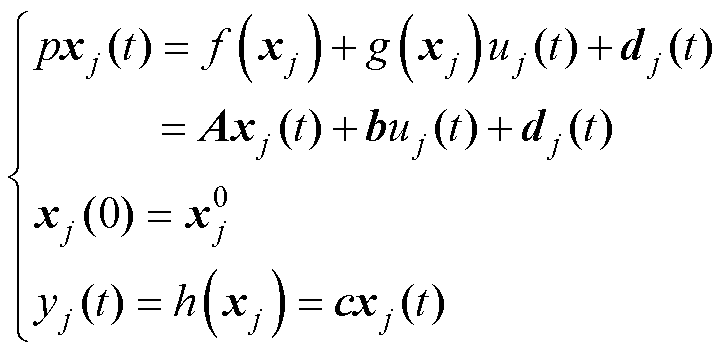 (7)
(7)
其中
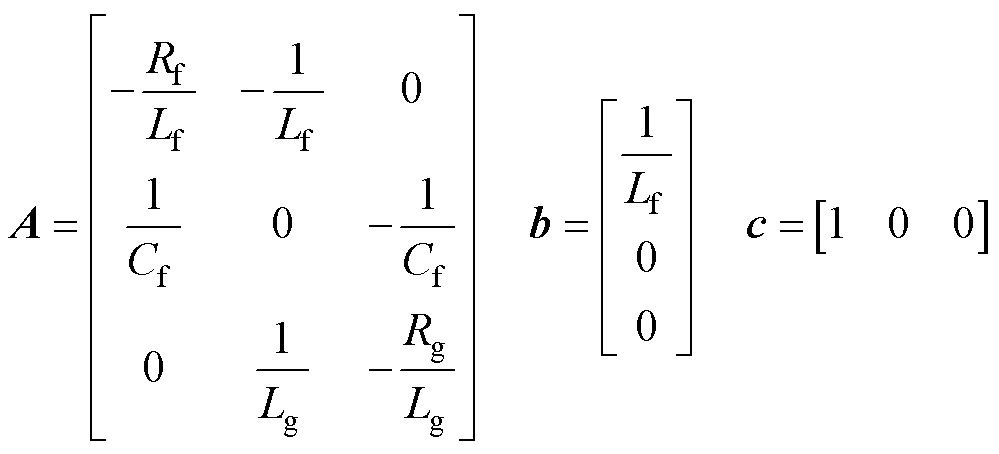
式中,xj(t)=[xj1 xj2 xj3]T=[ifj vj igj]T作为状态变量;uj(t)=ej和yj(t)=xj1=ifj分别作为系统的控制输入和控制输出;dj(t)=[0 0 -vgj]T表示系统是有界的。
由式(7)可得,构网型换流器的每一相动态特性方程可以被认为是一个单输入单输出(Single-Input Single Output, SISO)系统。因此,求取 的相对阶数为
的相对阶数为
 (8)
(8)
式中, 为李导数。因此关于
为李导数。因此关于 的相对阶数
的相对阶数 。采用一阶漏斗控制限制故障电流。故障发生时,换流器出口处的滤波电流
。采用一阶漏斗控制限制故障电流。故障发生时,换流器出口处的滤波电流 通过IFC调节准确跟踪给定的电流参考值
通过IFC调节准确跟踪给定的电流参考值 。每一相的IFC逻辑表达式为
。每一相的IFC逻辑表达式为
 (9)
(9)
式中, ,
, 。
。 是逻辑表达式(9)的输出。换流器的触发信号由决定,即
是逻辑表达式(9)的输出。换流器的触发信号由决定,即
 (10)
(10)
与传统的定值漏斗边界不同,为了实现在对称和不对称故障期间电流维持三相对称余弦运行,改进漏斗控制的漏斗边界被设计为三相电流参考值,能够实现动态余弦变化,其边界表达式为
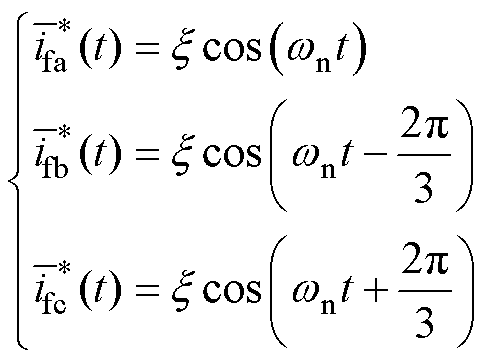 (11)
(11)
式中, 为漏斗边界幅值,代表故障期间电流的幅值,为保证稳定运行,本文设=0.95。通过IFC对式(11)中余弦边界的准确跟踪,实现故障期间电流维持三相对称运行且不出现过电流。结合式(9)与式(10),可以实现IFC的逻辑控制框图如图6所示。
为漏斗边界幅值,代表故障期间电流的幅值,为保证稳定运行,本文设=0.95。通过IFC对式(11)中余弦边界的准确跟踪,实现故障期间电流维持三相对称运行且不出现过电流。结合式(9)与式(10),可以实现IFC的逻辑控制框图如图6所示。
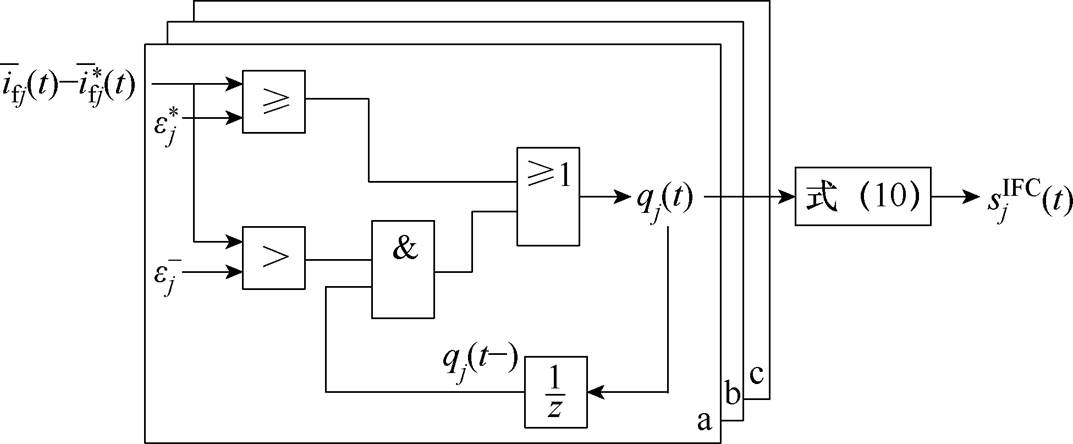
图6 IFC逻辑控制框图
Fig.6 The logic control scheme of IFC
图6中, 、
、 分别为IFC的裕度上、下边界;qj(t-)由qj(t)经过延时模块生成。IFC逻辑控制的输入为换流器出口处三相滤波电流
分别为IFC的裕度上、下边界;qj(t-)由qj(t)经过延时模块生成。IFC逻辑控制的输入为换流器出口处三相滤波电流 与给定电流参考值的偏差。
与给定电流参考值的偏差。
由式(6)得到标幺值下的表达式为
 (12)
(12)
令 ,对
,对 进行求导得到
进行求导得到
 (13)
(13)
当故障发生时,切入IFC控制,有 ,
, 。由式(11),
。由式(11), 。故障过程中,切入IFC电流限制器,根据式(9),第j相触发信号与滤波电流的关系如图7所示。故在IFC工作过程中,滤波电流始终在有界范围内,
。故障过程中,切入IFC电流限制器,根据式(9),第j相触发信号与滤波电流的关系如图7所示。故在IFC工作过程中,滤波电流始终在有界范围内,
 。此时,
。此时, 是有界的。当误差信号
是有界的。当误差信号 时,
时, ,当
,当 时,
时, ,误差
,误差 有界,故IFC的控制误差有界。
有界,故IFC的控制误差有界。
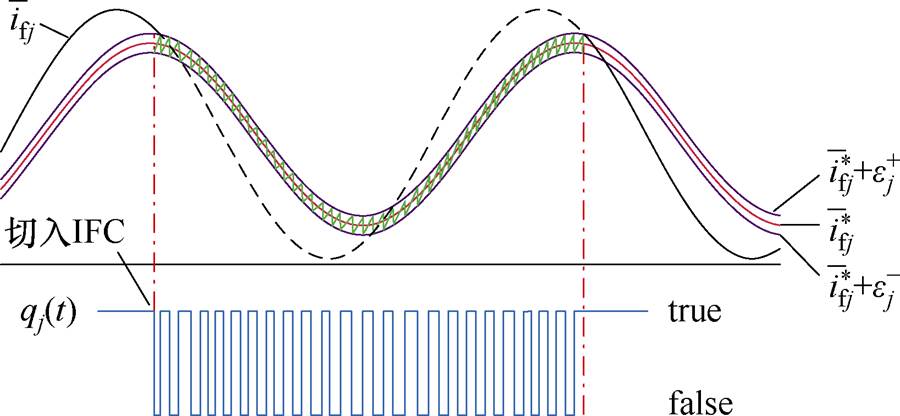
图7 IFC电流限制原理
Fig.7 The current limitation mechanism of IFC
本文根据故障时出现过电流和故障清除后电压恢复这两种状态,设计了一种电流和电压状态相关的切换策略,直流电压同步构网控制与改进漏斗控制之间切换策略的示意图如图8所示。Ts为实验步长,Tblock为换流器闭锁时间。
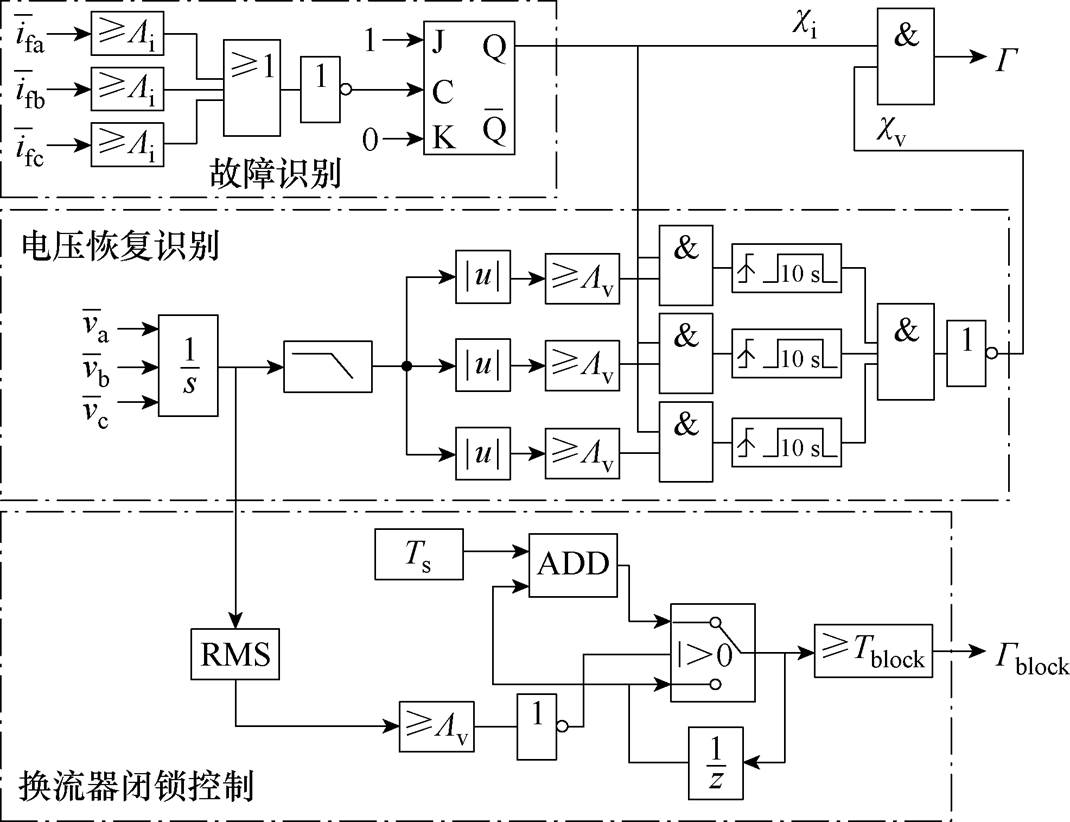
图8 直流电压同步构网控制与改进漏斗控制之间切换策略的示意图
Fig.8 The schematic of switch strategy between DC-link voltage synchronization grid-forming control and improved funnel control
该切换策略包括三个部分:故障识别模块、电压恢复识别模块以及换流器闭锁控制模块。稳定运行时,故障识别模块输出 =0,电压恢复识别模块输出
=0,电压恢复识别模块输出 =1,此时
=1,此时 =0,系统为直流电压同步构网型控制。当三相电路中某一相检测出过电流时,即
=0,系统为直流电压同步构网型控制。当三相电路中某一相检测出过电流时,即 时,故障识别模块输出信号为=1,=1保持不变,此时=1,系统切换至IFC进行限流。当故障清除且电压恢复至阈值
时,故障识别模块输出信号为=1,=1保持不变,此时=1,系统切换至IFC进行限流。当故障清除且电压恢复至阈值 时,切换策略的输出=0,系统恢复至直流电压同步构网控制,实现故障穿越。
时,切换策略的输出=0,系统恢复至直流电压同步构网控制,实现故障穿越。
当发生永久性故障或保护动作失败时,需要及时切除换流器以保证电力系统的稳定运行。如图8所示,当发生永久性故障或者保护动作失败时,并网点电压有效值得不到恢复,当故障持续时间超过Tblock时,输出 ,换流器闭锁,同时控制换流器从电网中切除,此时换流器工作在停运模式。
,换流器闭锁,同时控制换流器从电网中切除,此时换流器工作在停运模式。
为了验证第1节的理论分析,即电流饱和算法能够有效限制故障电流,但会削弱系统的暂态稳定能力,而采用虚拟电阻方法不影响系统的暂态稳定能力,但限流能力不如电流限幅算法。进一步验证所提出IFC限流策略的有效性,本节基于Matlab/ Simulink对图9所示的单机系统进行仿真。不同限流措施下的单机系统均采用如图2所示的直流电压同步构网型控制,包括虚拟阻抗、电压内环和电流内环控制,其系统参数见表1。
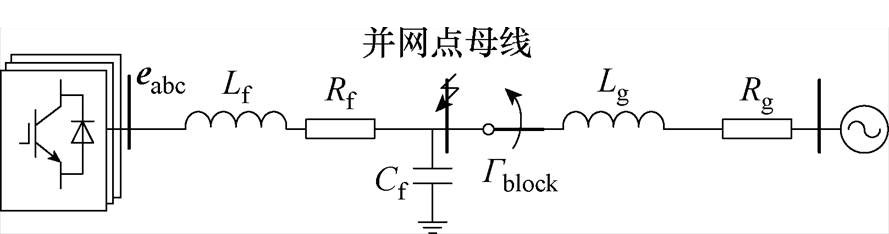
图9 仿真与实验下系统拓扑
Fig.9 The system topology under simulation and experiment
t=2 s时在并网点母线上投入一个三相短路接地故障,不同限流策略下的a相滤波电流波形如图10所示。
如图10所示,当不采用电流限幅措施且故障持续时间为0.22 s时,换流器在故障期间保持电压源特性,故障电流达到4(pu)时,电力电子设备可能会被击穿。当采用第1节所描述的d轴主导电流饱和算法且故障时间设置为0.22 s时,如图10绿色线所示。此时故障电流能限制在1.3(pu)左右,然而在故障清除后,系统发生低频振荡,无法回到稳态运行。这是因为电流饱和算法减少了暂态过程中的减速面积,因而削弱了系统的暂态稳定能力。当采用第1节所描述的虚拟电阻限流算法时,系统能够在0.28 s的故障持续时间中恢复,暂态同步能力比电流饱和算法强,但是故障过程中出现过电流,故障电流约是额定值1.6倍。当采用所提出的基于切换控制的IFC电流抑制算法时,设置故障电流幅值= 0.9,故障持续时间为0.32 s。如图10中的红色曲线所示,故障电流能成功抑制在0.9(pu)左右,并且故障过程中不出现过电流现象,同时暂态稳定能力不受影响,性能优于电流饱和算法和虚拟电阻算法。
表1 基于Matlab/Simulink的时域仿真系统的控制参数
Tab.1 The system and control parameters of time domain simulation based on Matlab/Simulink
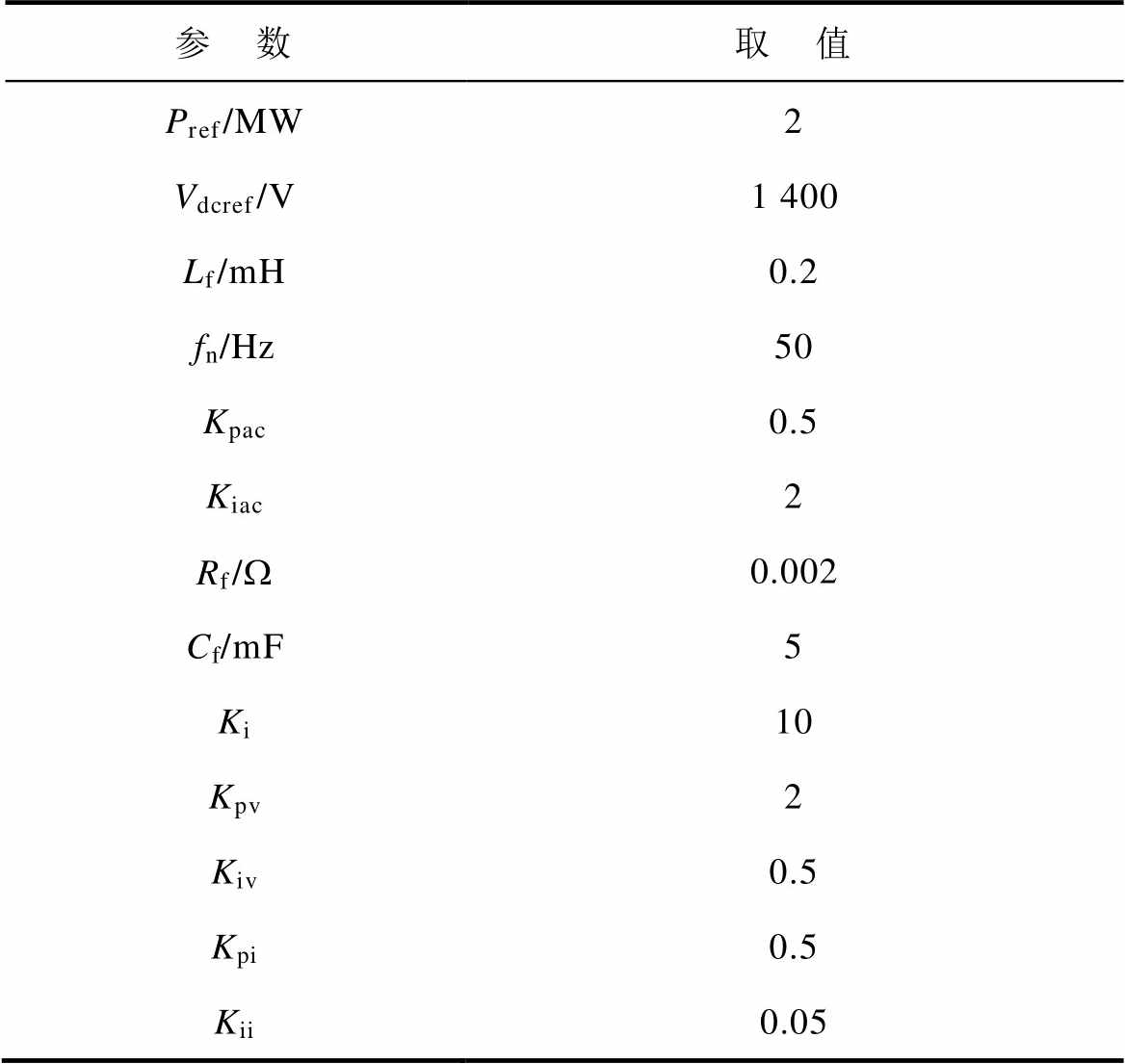
参 数取 值 Pref/MW2 Vdcref/V1 400 Lf/mH0.2 fn/Hz50 Kpac0.5 Kiac2 Rf/W0.002 Cf/mF5 Ki10 Kpv2 Kiv0.5 Kpi0.5 Kii0.05
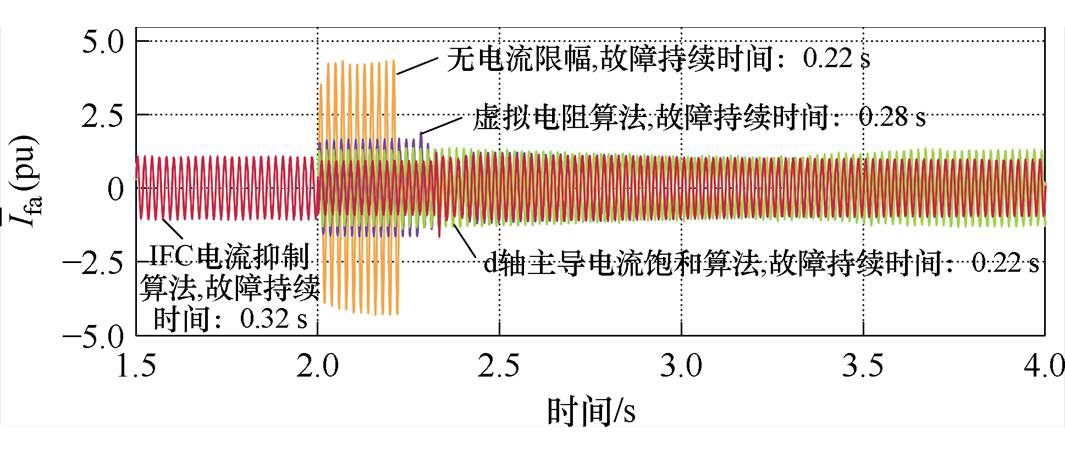
图10 三相对称故障下不同限流策略a相滤波电流波形
Fig.10 Phase a current waveform of different current limiting strategy under three-phase symmetrical fault
为了验证所提出的控制策略限流幅值可调的能力,图11给出了不同故障电流幅值 取值下的a相滤波电流波形。在t=2 s时,一个持续时间为0.32 s的三相短路接地故障发生于并网点,系统控制参数见表1。
取值下的a相滤波电流波形。在t=2 s时,一个持续时间为0.32 s的三相短路接地故障发生于并网点,系统控制参数见表1。
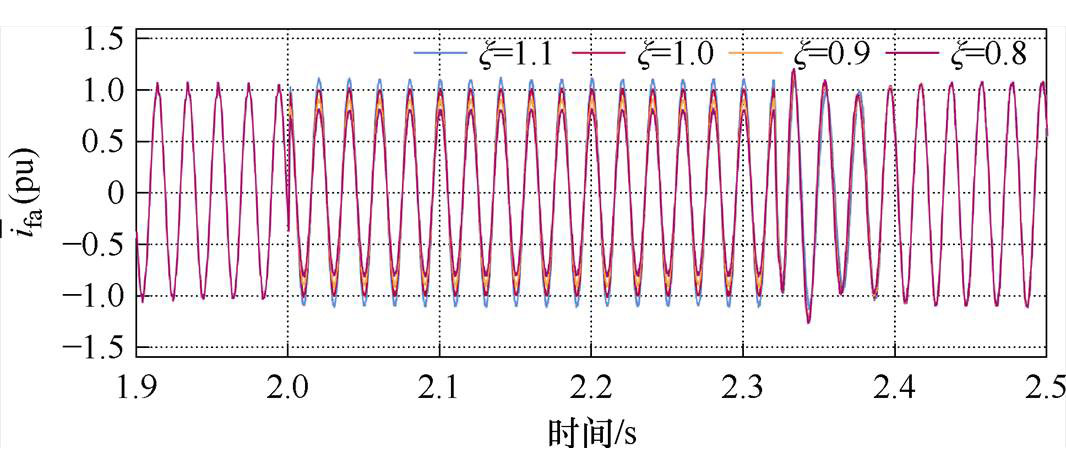
图11 三相对称故障下不同故障电流幅值 下的a相滤波电流波形
下的a相滤波电流波形
Fig.11 Phase a current waveform of different fault current amplitude under three-phase symmetrical fault
图11中,在不同故障电流幅值的取值下,IFC限流策略均能实现相应的电流限幅。故与传统电流限幅相比,IFC限流策略不仅有更强的限流能力,还存在故障电流幅值可调的优点。在大功率故障电流较大时,可以适当减少故障电流幅值,当故障电流较小时,故障电流幅值可以适当增大,因为由图11可知,越小,故障清除后的瞬时电流冲击越大。考虑换流器在故障过程中需输出无功功率提供电压支撑时,故障电流中含有无功电流分量,此时应当增大故障电流幅值。
为了进一步验证所提控制策略的可行性和有效性,在RTDS+dSpace构成的硬件在环实验平台搭建如图9所示的单机无穷大系统对IFC电流限幅的效果进行详细测试。实验平台如图12所示,换流器并网系统采用RTDS进行仿真,换流器控制系统配置于dSpace实时仿真器进行仿真,RTDS与dSpace之间通过光纤通信,仿真步长为2×10-5 s。系统采用IFC电流限制算法分别与电流饱和算法、虚拟电阻算法进行比较,故障场景分别设置为在并网点处发生三相短路接地故障、a、b两相短接故障以及a相接地故障。硬件在环实验所采用的系统和控制器参数见表2。
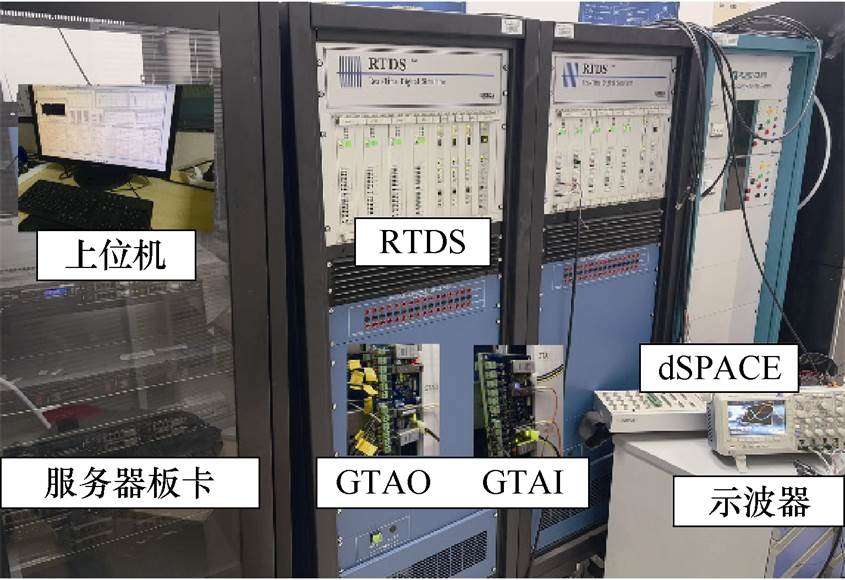
图12 硬件在环实验平台
Fig.12 Hardware-in-loop experimental platform
表2 基于Matlab/Simulink的硬件在环实验系统的控制参数
Tab.2 The system and control parameters of HIL experiments
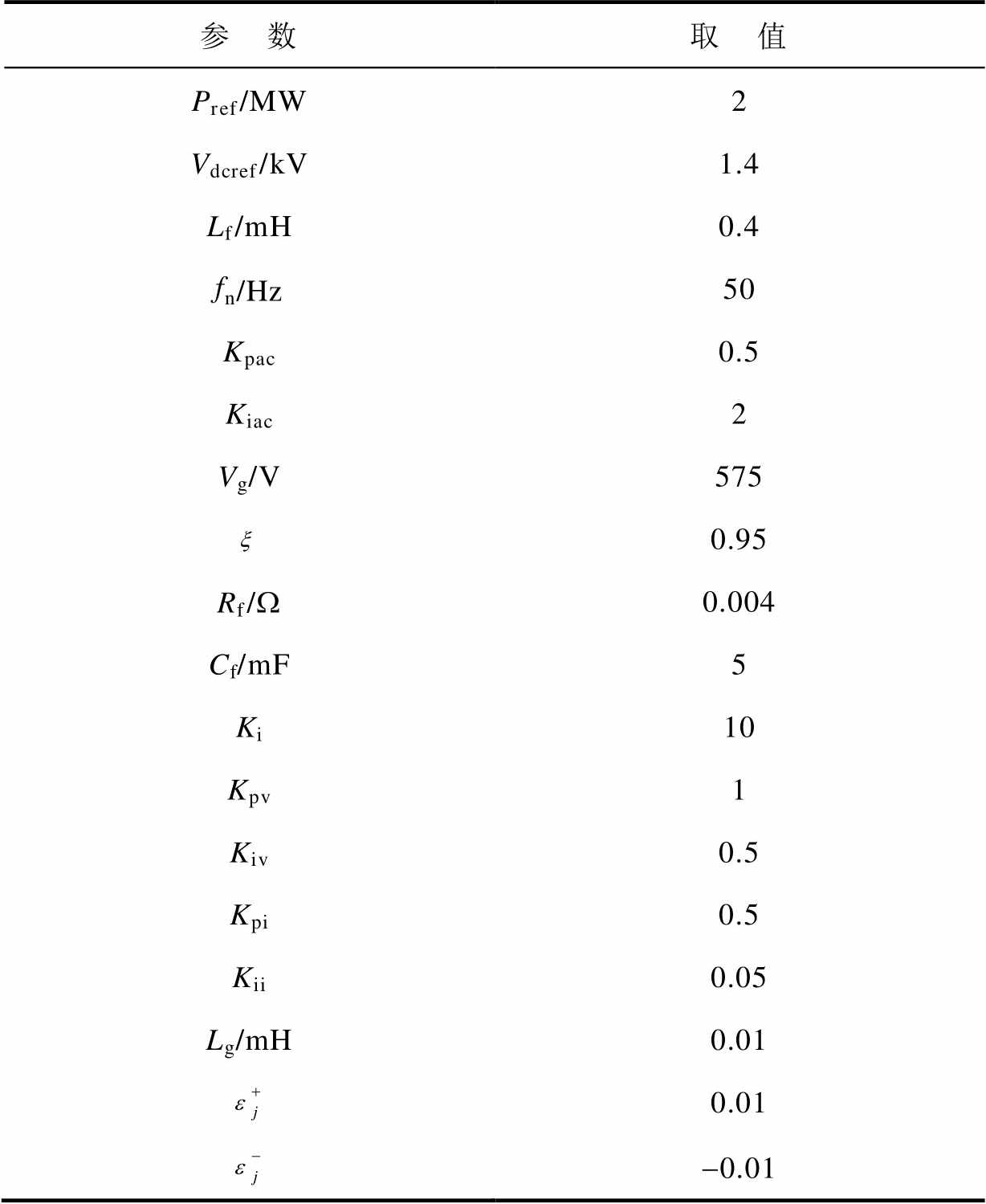
参 数取 值 Pref/MW2 Vdcref/kV1.4 Lf/mH0.4 fn/Hz50 Kpac0.5 Kiac2 Vg/V575 0.95 Rf/W0.004 Cf/mF5 Ki10 Kpv1 Kiv0.5 Kpi0.5 Kii0.05 Lg/mH0.01 0.01 -0.01
3.2.1 在t=2 s时并网点发生三相接地故障
图13和图14给出了不同限流策略下,并网点发生三相接地故障的三相滤波电流波形。图13c为不采用限流策略的实验波形,在故障期间故障电流超过2(pu),并且无法维持三相对称运行。图13a为采用电流饱和算法限流策略的实验波形,极限切除时间为0.22 s。可以看出,当三相短路接地故障发生时,系统出现一个2.2(pu)的瞬时冲击电流。在故障过程中,故障电流维持在1.4倍的额定电流,出现过电流现象。
图13b为采用虚拟电阻限流策略的实验波形,极限切除时间为0.27 s。当三相短路故障发生时,故障期间电流幅值为1.6倍的额定值,同时在故障清除并回到退出虚拟电阻控制环时出现约2(pu)的瞬时过电流。由此可以得出与第1节分析相同的结论。与虚拟电阻控制策略相比,电流饱和算法抑制故障电流效果更好,但暂态稳定能力削弱,这体现在极限切除时间的减少。图14给出了系统在IFC电流限制策略下的三相短路接地故障时的波形。

图13 三相接地故障时传统限流策略下三相滤波电流波形
Fig.13 The three-phase current waveforms of the test system with conventional current limitation strategies under three-phase-to-ground fault
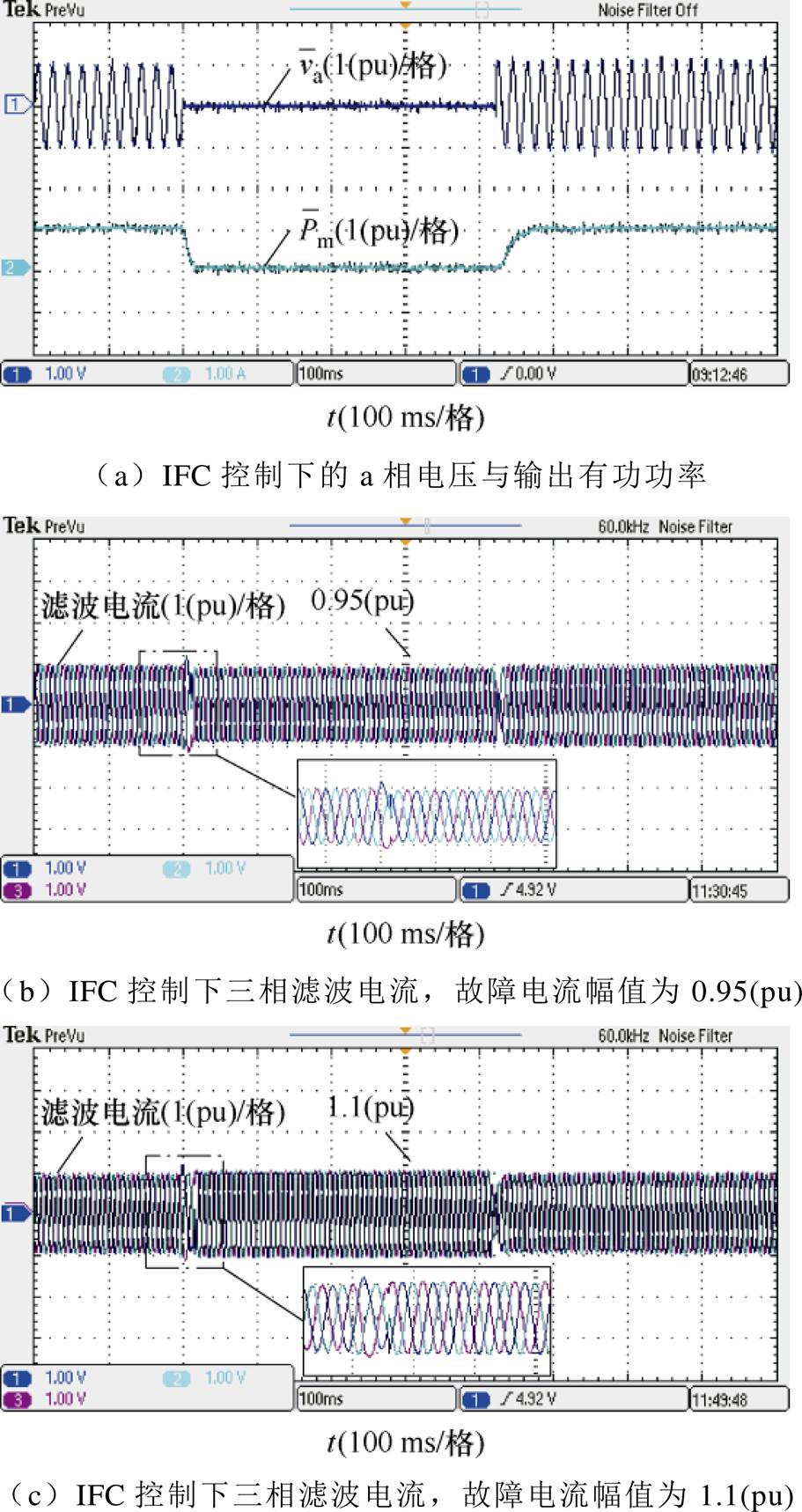
图14 三相接地故障时IFC限流策略下三相滤波电流波形
Fig.14 The three-phase current waveforms of the test system with IFC current limitation strategies under three-phase-to-ground fault
图14a给出了在IFC限流策略下系统的并网点a相电压波形和输出有功功率波形,此时故障清除时间为0.42 s。当并网点发生三相短路接地故障时,并网点电压跌落至0,此时输出有功功率由1(pu)降低至0(pu),经过0.42 s的故障后,系统电压恢复,有功功率以良好的暂态过程回到1(pu),系统保持稳定。图14b给出了在IFC限流措施下,换流器出口处的三相电流波形,此时故障电流幅值被设为0.95。可以看出,在故障过程中,由于图7所示的IFC工作原理,故障电流被限制在0.95(pu),与电流饱和算法和虚拟电阻限制策略相比,故障期间无过电流以及瞬时冲击电流,展现出良好的故障穿越能力,符合第2节的分析结果,并且与第1节的仿真结果一致。
考虑到故障期间换流器需提供无功支撑且维持有功电流,故障电流中存在无功电流分量,故障电流幅值应大于额定值。图14c给出了故障电流幅值被设为1.1的实验结果。如图14c所示,在检测出故障发生后,系统切入IFC电流限幅控制,故障期间电流维持在1.1(pu),经过0.42 s的故障后,系统仍能回到稳定运行状态。
3.2.2 在t=2 s时并网点发生ab两相短接故障
图15给出了不同限流控制策略下,并网点发生ab两相短接故障时的三相滤波电流波形。图15a给出了ab两相短接时并网点三相电压波形,此时a相与b相波形一致,c相电压幅值增加,这导致图15c与图15d中的电流出现不对称分量。图15c给出了系统在电流饱和算法下的三相滤波电流波形,故障持续时间为0.22 s。当不对称故障发生时,同样出现了2.2(pu)的瞬时冲击电流,在故障过程中a相和b相电流保持稳定运行,c相电流出现1.4(pu)的过电流,此时系统电流处于不对称运行状态。

图15 ab两相短接故障时不同限流策略下三相滤波电流波形
Fig.15 The three-phase current waveforms of the test system with different current limitation strategies under two-phase fault
图15d给出了在虚拟电阻限流算法下的三相滤波电流波形,故障持续时间为0.28 s。当不对称故障发生时,ab两相电流不出现过电流,但出现振荡,c相电流出现1.8(pu)的过电流,有明显的过电流现象,这种极端不对称电流会极大程度上影响换流器的稳定运行,即换流器暂态能力减弱。因此,从图15d故障清除后三相电流波形可以看出,在系统恢复稳态时需要经过一个振荡的暂态过程,这是另外两种方法所没有出现的现象,故虚拟电阻对不对称故障的恢复能力较弱,同时对不对称故障电流的限流效果不显著。
图15b给出了在IFC限流算法下的三相滤波电流波形,故障持续时间为0.42 s。与电流饱和算法相比,当不对称故障发生瞬间,IFC限流算法下不出现瞬时冲击电流。同时,与电流饱和算法和虚拟电阻算法相比,在故障过程中不出现过电流现象,故障电流维持在0.95(pu)附近,故障电流维持三相对称运行,与第2节的理论分析一致。
3.2.3 在t=2 s时并网点发生a相接地故障
图16给出了不同限流控制策略下,并网点发生a相接地故障时的三相滤波电流波形。图16a给出了在此故障场景下的并网点三相电压波形,当故障发生时,a相电压跌至0,b相电压保持额定运行,c相电压超过额定值。图16c给出了系统在电流饱和算法下的三相滤波电流波形,故障持续时间为0.22 s。当故障发生时,同样出现一个瞬时冲击电流,故障过程中出现两相过电流,为额定值的1.4倍,而另一相电流仍保持额定运行。图16d给出了在虚拟电阻限流策略下的三相滤波电流波形,故障持续时间为0.28 s。同样地,在故障发生时出现1.5(pu)的瞬时过电流,但由于故障程度较弱,故障过程中过电流不明显,但是出现明显的不对称电流。另外,在故障清除后,系统采用虚拟电阻限流时仍需要经过一个振荡过程才能回到稳态。
图16b给出了在IFC限流控制策略下的三相滤波电流波形,故障持续时间为0.42 s。与其他两种方法不同,故障发生时不出现瞬时冲击电流,同时在故障期间电流幅值始终维持在所设定的0.95(pu)之内。另外,与虚拟电阻限流策略相比,采用IFC限流策略的系统在故障清除后不会发生振荡。

图16 a相接地故障时不同限流策略下三相电流波形
Fig.16 The three-phase current waveforms of the test system with different current limitation strategies under a-phase-to-ground fault
通过在对称故障与不对称故障场景下,对三种限流方法进行对比可以看出,本文所提出的IFC电流限制策略能够有效地限制对称和不对称故障电流。这体现在:一方面在故障发生瞬间系统不出现瞬时冲击电流;另一方面在故障过程中故障电流的幅值有效可控,避免了持续过电流的风险,从而保证电力电子设备不易被击穿,同时拥有更好的暂态稳定能力。为了更进一步对比三种限流措施的性能,表3从三相接地短路故障极限切除时间(Critical Clearing Time, CCT)、是否出现过电流、是否出现瞬时冲击电流以及是否出现不对称电流分量这四个维度进行比较。
表3 不同限流策略的比较
Tab.3 The comparisons of different current limitation strategies

IFC电流饱和算法虚拟电阻算法 出现不对称电流否是是 出现过电流否是是 出现瞬时冲击电流否是是 三相接地短路故障CCT大于0.42 s0.225 s0.28 s
3.2.4 在t=2 s时并网点发生永久性三相接地故障
为验证所设计的切换策略在不同模式下的切换效果,图17给出了在并网点发生永久性故障时,含IFC限流策略的并网点三相电压与换流器出口处三相滤波电流波形。
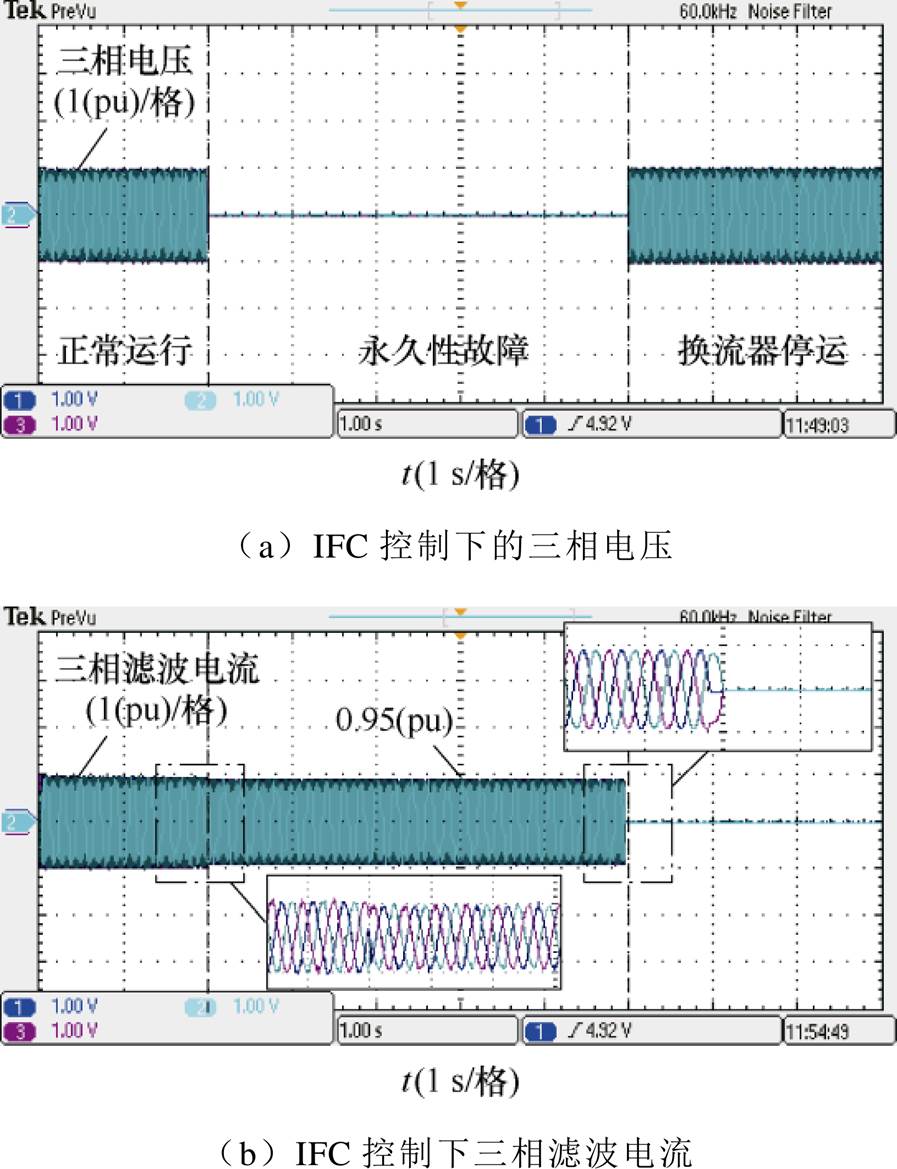
图17 永久性三相接地故障时含IFC的系统暂态响应
Fig.17 The transient responses of the test system with IFC strategy under three-phase-to-ground forever fault
当三相接地故障在t=2 s发生时,并网点电压立即跌落至0,如图16a所示。此时换流器通过切换策略进入限流模式,由于IFC的切入,故障期间故障电流被限制为幅值为0.95(pu)的三相正弦波,系统能够继续保持一段时间的对称运行,如图17b所示。
当故障持续时间超过所设定的Tblock时,Tblock在实验中取值为5,则切换策略输出换流器停运信号,并将换流器切除,此时电压恢复至额定值,同时换流器出口处电流为0。
针对传统电流饱和算法削弱系统暂态稳定性能和虚拟阻抗限流算法限流能力较弱的问题,本文提出了一种基于IFC的故障电流限制方法。该方法通过跟踪给定的电流参考值,一方面能够将故障电流精准限制在设定幅值内;另一方面在不对称故障时,可使电流维持三相对称运行。这一过程不影响换流器的暂态稳定性能,从而为各类短路故障电流的抑制提供了有效方案。仿真和实验分析证明了该方法的有效性。通过理论分析和结果对比分析,可以得出以下结论:
1)通过功角特性分析得出,CSA虽能有效限流,但会减少直压同步构网型换流器暂态功角特性中的减速面积,导致系统在故障恢复时暂态稳定性能变弱。而VR电流限制算法因不改变功角曲线面积,对暂态稳定无影响,但其限流能力有限,在三相短路接地故障中会出现过电流,限流效果不及CSA。此外,这两种方法均未考虑对不对称故障电流的限制。
2)与CSA和VR电流限制算法相比,本文提出的IFC算法配合所提出的切换策略,能够在故障发生瞬间进行切换且不出现瞬时冲击电流,同时在故障清除后,系统能够以较好的动态特性从IFC算法切换至直流电压同步构网型控制。
3)与CSA和VR电流限制算法相比,本文提出的IFC算法展现出更优越的限流性能。一方面IFC算法不影响系统的暂态稳定能力;另一方面该算法具备可调节的电流限幅幅值,其范围为0.8~1.1(pu),能够保证系统在故障期间维持稳定运行。
4)与CSA和VR电流限制算法相比,本文提出的IFC算法能够在无需注入负序电流的情况下抑制不对称故障电流,在不对称故障过程中保持三相对称运行。同时IFC算法实现步骤简单,无需改变现有控制器结构。
参考文献
[1] 詹长江, 吴恒, 王雄飞, 等. 构网型变流器稳定性研究综述[J]. 中国电机工程学报, 2023, 43(6): 2339- 2359.
Zhan Changjiang, Wu Heng, Wang Xiongfei, et al. An overview of stability studies of grid-forming voltage source converters[J]. Proceedings of the CSEE, 2023, 43(6): 2339-2359.
[2] 赵统, 吴超, 王勇, 等. 频率自适应的构网型变流器宽频带谐波电压抑制策略[J]. 电工技术学报, 2025, 40(1): 164-177.
Zhao Tong, Wu Chao, Wang Yong, et al. A frequency- adaptive wide bandwidth harmonic voltage supper- ssion strategy for grid-forming converters[J]. Transa- ctions of China Electrotechnical Society, 2025, 40(1): 164-177.
[3] 刘思佳, 刘海涛, 张隽, 等. 基于等效阻抗的虚拟同步机电压支撑影响因素分析与改进控制策略研究[J]. 电工技术学报, 2025, 40(9): 2738-2751.
Liu Sijia, Liu Haitao, Zhang Jun, et al. Research on the analysis of virtual synchronous generator voltage support influence factors and improvement control strategies based on equivalent impedance[J]. Transac- tions of China Electrotechnical Society, 2025, 40(9): 2738-2751.
[4] 迟永宁, 江炳蔚, 范译文, 等. 构网型变流器: 控制与稳定特性[J]. 高电压技术, 2025, 51(4): 1527- 1542.
Chi Yongning, Jiang Bingwei, Fan Yiwen, et al. Grid-forming converters: control and behavior of stability[J]. High Voltage Engineering, 2025, 51(4): 1527-1542.
[5] 金涛, 沈学宇, 苏泰新, 等. 不平衡电网下并网逆变器的模型预测电流限幅灵活控制[J]. 电工技术学报, 2019, 34(11): 2342-2353.
Jin Tao, Shen Xueyu, Su Taixin, et al. Flexible model predictive control with peak current limitation for grid-connected inverter under unbalanced grid voltage[J]. Transactions of China Electrotechnical Society, 2019, 34(11): 2342-2353.
[6] Fan Bo, Liu Teng, Zhao Fangzhou, et al. A review of current-limiting control of grid-forming inverters under symmetrical disturbances[J]. IEEE Open Journal of Power Electronics, 2022, 3: 955-969.
[7] Zhang Lidong, Harnefors L, Nee H P. Power- synchronization control of grid-connected voltage- source converters[J]. IEEE Transactions on Power Systems, 2010, 25(2): 809-820.
[8] Pal A, Pal D, Panigrahi B K. A current saturation strategy for enhancing the low voltage ride-through capability of grid-forming inverters[J]. IEEE Transa- ctions on Circuits and Systems II: Express Briefs, 2023, 70(3): 1009-1013.
[9] 姜卫同. 考虑电流限幅控制的组网型逆变器暂态稳定分析及其控制策略改进[D]. 杭州: 浙江大学, 2022.
Jiang Weitong. Transient stability analysis and control strategy improvement of grid-forming VSC considering current limiting control[D]. Hangzhou: Zhejiang University, 2022.
[10] 葛平娟, 肖凡, 涂春鸣, 等. 考虑故障限流的下垂控制型逆变器暂态控制策略[J]. 电工技术学报, 2022, 37(14): 3676-3687.
Ge Pingjuan, Xiao Fan, Tu Chunming, et al. et al. Transient control strategy of droop-controlled inverter considering fault current limitation[J]. Transactions of China Electrotechnical Society, 2022, 37(14): 3676-3687.
[11] 王盼宝, 王鹏, 李珅光, 等. 电网故障下构网型逆变器动态限流控制策略[J]. 高电压技术, 2022, 48(10): 3829-3837.
Wang Panbao, Wang Peng, Li Shenguang, et al. Dynamie current-limiting control strategy of grid forming inverter under grid faults[J]. High Voltage Engineering, 2022, 48(10): 3829-3837.
[12] 高本锋, 沈雨思, 宋瑞华, 等. 虚拟同步机控制模块化多电平变流器阻抗建模及次/超同步振荡稳定性分析[J]. 电工技术学报, 2025, 40(2): 559-573.
Gao Benfeng, Shen Yusi, Song Ruihua, et al. Impedance modeling and sub/super synchronous oscillation stability analysis of modular multilevel converter under virtual synchronous generator control[J]. Transactions of China Electrotechnical Society, 2025, 40(2): 559-573.
[13] Rokrok E, Qoria T, Bruyere A, et al. Transient stability assessment and enhancement of grid-forming converters embedding current reference saturation as current limiting strategy[J]. IEEE Transactions on Power Systems, 2022, 37(2): 1519-1531.
[14] 高长伟, 黄翀阳, 郑伟强, 等. 虚拟阻抗制动可再生能源机组低电压穿越控制[J]. 电力系统保护与控制, 2023, 51(10): 142-152.
Gao Changwei, Huang Chongyang, Zheng Weiqiang, et al. Low voltage ride-through control of a renewable energy unit with virtual impedance braking[J]. Power System Protection and Control, 2023, 51(10): 142- 152.
[15] 刘伟, 刘欣悦. 基于能量函数和改进虚拟同步控制的低频振荡抑制策略[J]. 电气技术, 2024, 25(9): 1-8.
Liu Wei, Liu Xinyue. Low-frequency oscillation suppression strategy based on the energy function and improved virtual synchronization control[J]. Elec- trical Engineering, 2024, 25(9): 1-8.
[16] 李建林, 邹菲, 游洪灏, 等. 构网型储能变流器自适应低电压穿越控制策略[J]. 电工技术学报, 2025, 40(9): 2724-2737.
Li Jianlin, Zou Fei, You Honghao, et al. Research on adaptive low-voltage ride-through control strategy of grid-forming energy storage converter[J]. Transa- ctions of China Electrotechnical Society, 2025, 40(9): 2724-2737.
[17] 刘欣, 郭志博, 贾焦心, 等. 基于序阻抗的虚拟同步发电机并网稳定性分析及虚拟阻抗设计[J]. 电工技术学报, 2023, 38(15): 4130-4146.
Liu Xin, Guo Zhibo, Jia Jiaoxin, et al. Stability analysis and virtual impedance design of virtual synchronous machine based on sequence impe- dance[J]. Transactions of China Electrotechnical Society, 2023, 38(15): 4130-4146.
[18] 范宸珲, 秦晓辉, 齐磊, 等. 构网型下垂控制中虚拟阻抗的作用、改进及研究前景分析[J]. 电网技术, 2024, 48(6): 2237-2250.
Fan Chenhui, Qin Xiaohui, Qi Lei, et al. Analysis of the role, improvement, and research prospects of virtual impedance in grid-forming droop control[J]. Power System Technology, 2024, 48(6): 2237-2250.
[19] Kim S, Kim K H, Cui Shenghui, et al. Adjustable virtual impedance via anti-windup method for enhancing transient stability and grid-forming capa- bility under current limiting conditions[J]. IEEE Transactions on Power Electronics, 2025, 40(5): 6423-6428.
[20] Fan Bo, Wang Xiongfei. Fault recovery analysis of grid-forming inverters with priority-based current limiters[J]. IEEE Transactions on Power Systems, 2023, 38(6): 5102-5112.
[21] Paquette A D, Divan D M. Virtual impedance current limiting for inverters in microgrids with synchronous generators[J]. IEEE Transactions on Industry Appli- cations, 2015, 51(2): 1630-1638.
[22] Liu Teng, Wang Xiongfei, Liu Fangcheng, et al. A current limiting method for single-loop voltage- magnitude controlled grid-forming converters during symmetrical faults[J]. IEEE Transactions on Power Electronics, 2022, 37(4): 4751-4763.
[23] 沈霞, 黄文, 帅智康. 基于准PR控制的虚拟同步逆变器故障冲击电流快速抑制方法研究[J]. 中国电机工程学报, 2018, 38(16): 4768-4776, 4981.
Shen Xia, Huang Wen, Shuai Zhikang. Research of inrush current restraining strategy based on quasi-PR control for synchronverter during grid fault[J]. Pro- ceedings of the CSEE, 2018, 38(16): 4768-4776, 4981.
[24] Rosso R, Engelken S, Liserre M. Current limitation strategy for grid-forming converters under symmet- rical and asymmetrical grid faults[C]//2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 2020: 3746-3753.
[25] Huang Linbin, Xin Huanhai, Wang Zhen, et al. Transient stability analysis and control design of droop-controlled voltage source converters con- sidering current limitation[J]. IEEE Transactions on Smart Grid, 2019, 10(1): 578-591.
[26] Liberzon D, Trenn S. The Bang-Bang funnel controller for uncertain nonlinear systems with arbitrary relative degree[J]. IEEE Transactions on Automatic Control, 2013, 58(12): 3126-3141.
Abstract With the increasing penetration of large-scale renewable energy generation, the synchronization stability of grid-forming (GFM) converters exerts a profound influence on power system transient stability. When the system encounters large disturbances, such as severe voltage sags, significant load variations, and metallic ground faults, the converter current will increase significantly. It threatens the safe operation of power electronic devices and can lead to large-scale tripping of converter-based power sources. Therefore, effective fault current limiting control is one of the key measures to ensure the stable operation of GFM converters. However, conventional current limiting control strategies commonly reduce the equivalent deceleration area of GFM converters, thereby decreasing the transient stability margin. This paper proposes a novel fault current limiting strategy for converters based on improved funnel control (IFC). The main contributions of this paper can be summarized as follows.
The equivalent model of the GFM converter under significant disturbance is established, and the adverse effect of the current saturation algorithm (CSA) is revealed through the analysis of power angle stability. It is found that the introduction of CSA reduces the deceleration area of the GFM converters during significant disturbances. Moreover, simulation results indicate that overcurrent would occur during the fault when the virtual resistor (VR)-based current limiting strategy is adopted.
Considering that the funnel control scheme can accurately track the reference value of the objective variable and the tracking error can be flexibly controlled, the IFC current limiting strategy achieved by utilizing switching logic is designed, which can restrict the fault current amplitude within the pre-defined error funnels. The relative degree in the single-input single-output (SISO) system established by the circuit formulation of the converter is obtained, making it feasible to use a first-order funnel controller for direct fault current regulation due to the first-order relative degree.
Moreover, a switch strategy is also designed for recognizing the overcurrent and the voltage recovery. The converter switches to IFC current limiting mode when the overcurrent appears and switches back to GFM control mode after the grid voltage recovers. To ensure the converter is protected from the hazards of constant faults, the proposed control strategy is capable of issuing a converter shutdown command after identifying long-term faults.
Furthermore, the boundedness of the tracking error is proved by theoretical analysis. Single-phase output currents are investigated by simulations on Matlab/Simulink with different fault current reference values. IFC, CSA, and VR current limiting methods are compared by hardware-in-the-loop (HIL) experiments under symmetrical and asymmetrical faults. The following conclusions are obtained. (1) Compared with the CSA and VR current limiting algorithms, the proposed IFC strategy shows superior current limiting performance. On one hand, it does not affect the transient stability ability of the system. On the other hand, this algorithm has an adjustable current limiting amplitude from 0.8(pu) to 1.1(pu), which can ensure that the system maintains stable operation during faults. (2) The proposed strategy can suppress the asymmetric fault current without injecting negative sequence current and maintain three-phase symmetrical operation despite the asymmetric fault. Meanwhile, the implementation of the IFC algorithm is simple and requires no changes to the existing controller structure.
keywords:Grid-forming converters, DC-link voltage synchronization control, current limiting, funnel control
DOI: 10.19595/j.cnki.1000-6753.tces.250574
中图分类号:TM614
广东省自然科学基金海上风电联合基金资助项目(2023A1515240019)。
收稿日期 2025-04-10
改稿日期 2025-04-28
李昊恒 男,2001年生,硕士研究生,研究方向为跟网型和构网型变流器稳定性分析与控制。E-mail: ephoen@mail.scut.edu.cn
刘 洋 男,1989年生,副教授,博士生导师,研究方向为电力系统分析、稳定和控制等。E-mail: epyangliu@scut.edu.cn(通信作者)
(编辑 陈 诚)