 ,其中每个样本
,其中每个样本 表示长度为l的窗口化片段,如电机轴承加速度信号片段。通过SRG网络,输入片段
表示长度为l的窗口化片段,如电机轴承加速度信号片段。通过SRG网络,输入片段 被映射为残差片段
被映射为残差片段 ,即
,即 且满足
且满足摘要 针对电机各类序列数据中的故障特征难以直接辨识和依赖人工经验的问题,该文提出了一种残差内积驱动的序列故障检测模型(RID-FDM),可在仅使用健康数据训练的条件下,实现轴承局部损伤、定子匝间短路及转子断条三类典型故障的高灵敏度检测。该模型通过序列窗口化将长时序数据分割为局部片段,利用片段残差生成器提取输入与输出间的残差特征,并设计全局残差内积损失迫使健康数据的残差内积序列趋近于零。故障发生时,残差内积序列的均值、方差等统计指标因输入分布偏移而显著偏离,触发阈值报警机制。实验表明,RID-FDM对三类电机故障的检测准确率均超过90%,优于传统主成分分析、自编码器等方法。该研究完全由数据驱动,为少样本、高实时性要求的工业故障检测提供了新的解决方案。
关键词:异步电机 故障检测 神经网络 无监督学习 零样本检测
在电机故障检测领域,振动分析和定子电流监测等对时间序列信号的解读有着决定性作用[1-3]。这些信号融合了丰富的信息与不可避免的噪声,其中蕴含的特征对于理解设备健康状态至关重要[4-7]。然而,在实际应用中,微弱故障信号常被强背景噪声与冗余信息掩盖,难以直接辨识和提取[8]。因此,探索并实施有效的技术手段以增强时间序列数据中的特征表现,使潜在的异常模式更加突出,具有至关重要的意义。
常见的特征增强方法如主成分分析(Principal Component Analysis, PCA)[9-11]、独立成分分析(Independent Component Analysis, ICA)[12]和线性判别分析(Linear Discriminant Analysis, LDA)[13-14]适用于高维数据[15-16],而电机的序列信号通常是低维度的,如轴承的振动数据是单通道的一维时间序列数据、三相定子电流数据是三通道的二维时间序列数据。因此,在利用PCA等传统特征强化方法处理低维度序列数据时,会先将序列数据转化为计算统计量,如均值、方差、标准差、最值、峰度、偏度等,再对统计量实行特征增强,进而进行故障诊断。文献[17]提出了一种基于多元统计过程控制方法的滚动轴承故障检测框架。该框架使用历史正常运行数据训练模型,并计算监控指标的控制限值,然后用新采集的数据与这些控制限值对比来判断轴承的健康状态。文献[18]提出了一种基于红外热成像和二维离散小波变换的感应电机轴承故障诊断方法,通过主成分分析降维、马氏距离排序特征,并利用支持向量机进行分类。但此类方法在将序列信息转化为统计量的过程中,会损失大量原始信息,且无法保留序列的位置信息。
针对序列信号的特征增强方法主要集中在降低噪声影响、提高信噪比方面。文献[19]利用自适应频移随机共振增强了微弱信号,该方法利用噪声能量,将其部分转移给有用的信号,从而增强了微弱信号特征。文献[20]提出了一种新的基于Gramian的降噪策略用于轴承故障检测。该降噪策略通过增强振动信号中的低秩模式来减少无用噪声。但此类方法无差别地对待所有类型的数据特征,而非针对性地对故障特征进行强化。
自编码器(Autoencoder, AE)等无监督模型通过数据驱动方式提取潜在特征,为故障检测提供了新思路[21-24],通过编码解码,将信息压缩降维,从而使得异常特征得以凸显。文献[25]利用带自注意力机制的去噪自动编码器重建信号,在瓶颈层人为增加高斯噪声以减小原始噪声对信号的影响。文献[26]通过在自编码器中引入残差学习,提升了模型性能并降低了训练难度和时间成本。然而,现有方法存在两大局限:①重构误差作为标量指标无法保留故障的序列特性,导致误报漏报;②瓶颈层特征与物理故障机制缺乏显式关联。
针对上述挑战,本文提出残差内积驱动的无监督故障检测模型(Residual Inner product-Driven Fault Detection Model, RID-FDM),主要创新如下:
(1)残差内积敏感机制。通过片段残差生成器(Segment Residual Generator, SRG)生成与输入片段正交的残差表征,利用全局残差内积损失迫使健康数据的残差内积序列(Residual Inner Product Sequence, RIPS)趋近于零,而故障引发内积值剧烈偏离,实现故障敏感特征的自适应放大。
(2)窗口化残差传播。将长时序分割为局部片段,通过SRG的卷积网络捕捉故障局部特征,并利用残差内积的时序传播特性累积异常证据,兼顾局部敏感性与全局关联性。
(3)多故障普适性。通过残差内积的通用特征表征能力,模型可适配不同类型的电机故障,无需针对特定故障调整网络结构,仅需调整个别超参数,显著提升工程适用性。
1.1.1 残差内积的物理意义
考虑一个序列数据集,其中每个样本表示长度为l的窗口化片段,如电机轴承加速度信号片段。通过SRG网络,输入片段被映射为残差片段,即且满足
 (1)
(1)
核心目标为:在健康数据上,通过全局残差内积损失(Global Residual Inner Product Loss, GRIP Loss)迫使 ,即残差与输入在特征空间中近似正交;故障发生时,分布偏移导致内积值显著偏离零值。
,即残差与输入在特征空间中近似正交;故障发生时,分布偏移导致内积值显著偏离零值。
为阐明GRIP Loss的作用机制,考虑SRG为线性映射的简化场景。设残差生成过程为
 (2)
(2)
式中, 为权重矩阵。若
为权重矩阵。若 为反对称矩阵,即
为反对称矩阵,即 ,则对任意输入x,有
,则对任意输入x,有
 (3)
(3)
此性质表明:通过约束网络参数结构,可强制实现健康数据的残差正交性。实际SRG为非线性神经网络,GRIP Loss通过反向传播优化网络参数,使得健康数据的 最小化,而非依赖显式的矩阵约束。
最小化,而非依赖显式的矩阵约束。
1.1.2 窗口化策略的理论支撑
窗口化分段(将长序列切分为 长片段)对模型性能的影响可归结为以下三点:
长片段)对模型性能的影响可归结为以下三点:
(1)高维空间敏感性。当较大时,残差片段的维度随之增加,SRG可学习更复杂的局部特征映射规则,从而增强对微小故障(如轴承早期剥落)的敏感性。
(2)噪声抑制能力。短片段(较小)通过局部化处理抑制长序列中的全局噪声。
(3)模型规模限制。窗口化将大幅度减小模型参数量,加深对健康数据的拟合,使其对异常数据更加敏感。
1.1.3 故障检测的核心假设
对任意健康数据 ,训练后的SRG满足
,训练后的SRG满足
 ;若输入
;若输入 包含故障特征,其残差
包含故障特征,其残差 满足
满足 。此外,长序列故障特征可通过窗口化分解为局部片段的残差放大效应。
。此外,长序列故障特征可通过窗口化分解为局部片段的残差放大效应。
神经网络通过调整权重和偏置参数来学习输入与输出数据之间的映射关系[27],具有高效的拟合性能。理论上,具有无界活函数的神经网络可以逼近任意复杂的函数[28]。
神经网络深度越深,逼近的精度越高,拟合性能越强。文献[29]指出,在Sobolev空间中,对于一般光滑函数逼近,网络深度L的上界和权重W上界分别满足

 (4)
(4)
 (5)
(5)
式中, 为逼近精度;d为输入数据维度;n为Sobolev空间光滑性指标。即对于深度上界,随着逼近精度要求的提高,网络深度只需要以对数速度增加;对于权重数上界,随着逼近精度的提高,权重数会增加,但增加的速度会受到数据维度和函数光滑性的影响。
为逼近精度;d为输入数据维度;n为Sobolev空间光滑性指标。即对于深度上界,随着逼近精度要求的提高,网络深度只需要以对数速度增加;对于权重数上界,随着逼近精度的提高,权重数会增加,但增加的速度会受到数据维度和函数光滑性的影响。
SRG通过神经网络实现输入片段到残差片段的非线性映射。由于神经网络是通过数值方法构建函数,因此SRG无法严格满足正交约束 ,但通过GRIP Loss的优化,可迫使健康数据近似满足正交性,有
,但通过GRIP Loss的优化,可迫使健康数据近似满足正交性,有
 (6)
(6)
式中, 为训练后健康数据的残差内积容忍阈值,确保输入片段与残差片段呈弱相关性,内积接近0但不为0。
为训练后健康数据的残差内积容忍阈值,确保输入片段与残差片段呈弱相关性,内积接近0但不为0。
设健康数据受扰动后变为故障数据
 ,其中
,其中 为故障引入的差异。SRG生成的残差满足
为故障引入的差异。SRG生成的残差满足
 (7)
(7)
式中, 为SRG在
为SRG在 处的雅可比矩阵,故残差内积为
处的雅可比矩阵,故残差内积为
 (8)
(8)
由于健康数据满足 ,且与分布差异显著,高阶项
,且与分布差异显著,高阶项 主导内积值的增长,导致
主导内积值的增长,导致 。
。
若输入为时域信号,则周期性冲击将使所在窗口的残差内积突增,并通过谐波成分在相邻窗口传播;若输入为频域信号,则显著变化的频域模式将使得大部分窗口的残差内积均显著升高。
输入长序列数据 被分割为p个长度为k的输入片段
被分割为p个长度为k的输入片段 ,满足
,满足 。窗口长度k需权衡局部特征捕捉能力与噪声鲁棒性:①较长窗口有更强拟合能力,具有更宏观的感受野,但易引入无关噪声;②较小的窗口聚焦局部变化,容易识别频域局部特征与时域的瞬态冲击(如转子断条引起的电流波形畸变),但对大尺度或周期性特征的敏感性下降;③若采用重叠窗口,可增强输入的连续性,但复杂程度会显著上升,实验表明,非重叠窗口在保证实时性的前提下,对多数故障表现稳健。
。窗口长度k需权衡局部特征捕捉能力与噪声鲁棒性:①较长窗口有更强拟合能力,具有更宏观的感受野,但易引入无关噪声;②较小的窗口聚焦局部变化,容易识别频域局部特征与时域的瞬态冲击(如转子断条引起的电流波形畸变),但对大尺度或周期性特征的敏感性下降;③若采用重叠窗口,可增强输入的连续性,但复杂程度会显著上升,实验表明,非重叠窗口在保证实时性的前提下,对多数故障表现稳健。
将所有输入片段逐一传入SRG生成残差片段,SRG由一维卷积神经网络构成,结构如图1所示。SRG接收一个窗口化输入片段 ,输出一个残差片段
,输出一个残差片段 。若输入序列为频域,SRG的卷积层和全连接层激活函数为ReLU;若输入序列为时域,则改为LeakyReLU以避免梯度消失。
。若输入序列为频域,SRG的卷积层和全连接层激活函数为ReLU;若输入序列为时域,则改为LeakyReLU以避免梯度消失。
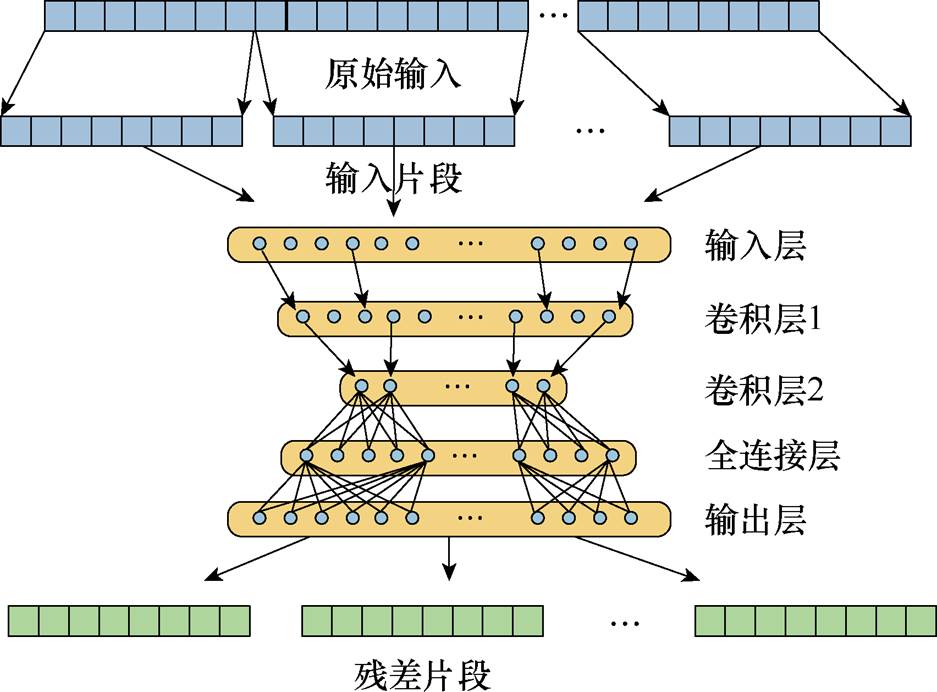
图1 片段残差生成器结构
Fig.1 Structure diagram of SRG
得到残差片段后,计算残差片段与输入片段内积,并将p个内积组合为RIPS,有
 (9)
(9)
因此,模型的GRIP Loss为
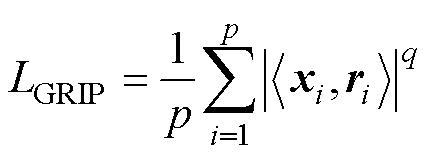 (10)
(10)
式中,q为敏感系数,控制损失函数的敏感度,默认q=2,平衡收敛速度与稳定性,适用多数场景;在高敏感场景,q=4,放大异常片段的损失贡献,加速故障检测。
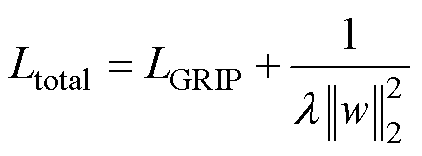
实验发现,SRG为满足GRIP Loss,模型拟合出极小权重,对任何输入均输出为零向量。为防止SRG输出全零退化解,必须对节点权重加以约束,要求权重的L2范数不能过小。因此,损失函数将改为
 (11)
(11)
其中
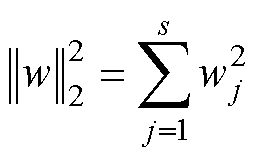 (12)
(12)
式中, 为约束系数;
为约束系数; 为权重向量的二次方;s为权重的数量。
为权重向量的二次方;s为权重的数量。
模型整体架构如图2所示。其工作流程为:①将轴承加速度数据或者定子电流数据作为输入,并通过序列窗口化策略分割为若干定长的局部片段;②将每个片段输入SRG提取局部特征并生成残差片段,SRG的训练目标是通过全局残差内积损失迫使健康数据的残差与输入片段在特征空间中近似正交;③对每个输入片段及其对应的残差片段计算内积值,并将所有片段内积值按分割顺序排列,构成残差内积序列;④用健康数据作为训练集训练模型,当模型损失到达设定值后停止训练;⑤根据健康数据验证集设定阈值,当测试数据的残差内积序列的故障敏感指标超过阈值时触发故障警报。
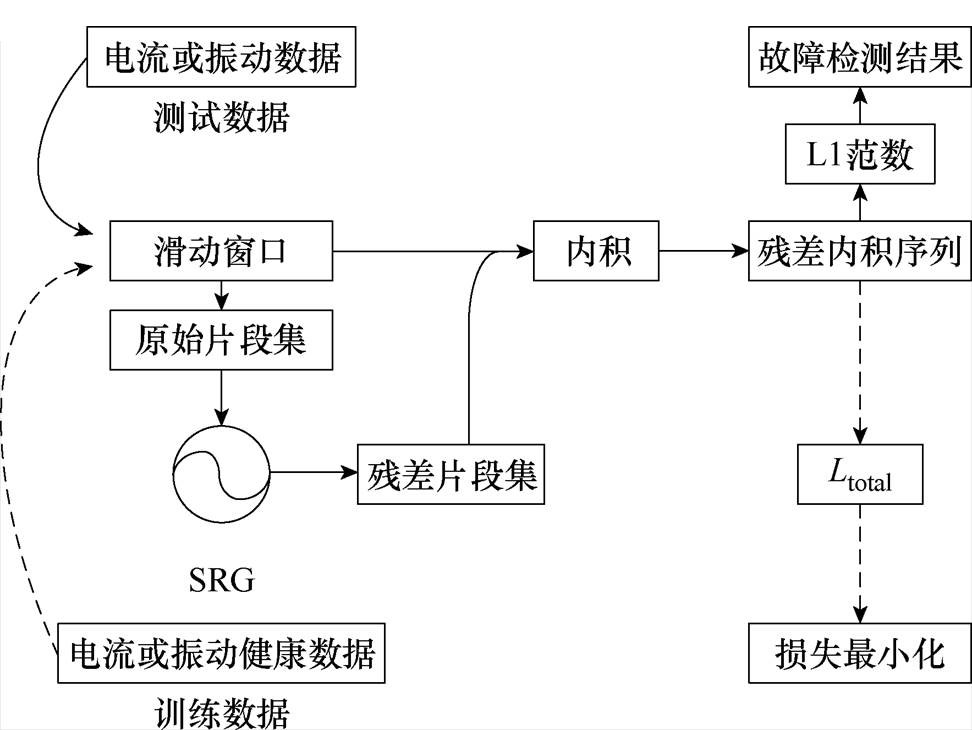
图2 模型结构
Fig.2 Model structure
在本节中,将对实验结果进行讨论和分析。本文所用的深度学习框架为Anaconda环境下的Pytorch1.9。
本文使用案例1和案例2验证所提方法对异步电机不同类型故障的适用性,覆盖了异步电机的轴承故障、定子匝间短路故障、转子断条故障。数据均在实验台上采集。
案例1为6026轴承故障数据集,验证了残差敏感机制的可行性以及RID-FDM的可行性。主要实验设备包括电机、控制箱和用于调整电机负载的电阻箱。电机型号为Y100L2-4,轴承型号6206。轴承振动信号采用Lance LC0104T压电加速度传感器采集,在实验中安装于轴承座正下方以测取垂直方向的振动加速度信号,采样频率为2.5 kHz。轴承故障如图3所示,实验轴承故障为人工故障,分别将不同故障的轴承安装在测试电机中,测量其空载、半载、满载状态下的加速度。故障情况见表1,其中凹槽深度为1.5 mm宽度不同的矩形槽,透槽代表深度不同的矩形槽。
案例2结合案例1验证了RID-FDM对多类故障的适应性,并探讨了模型的泛化性能。主要实验设备如图4所示,该故障模拟电机型号为Y132S2-2,可以通过调整接线实现定子匝间短路、转子断条等多种故障,通过联轴器连接可调直流负载。
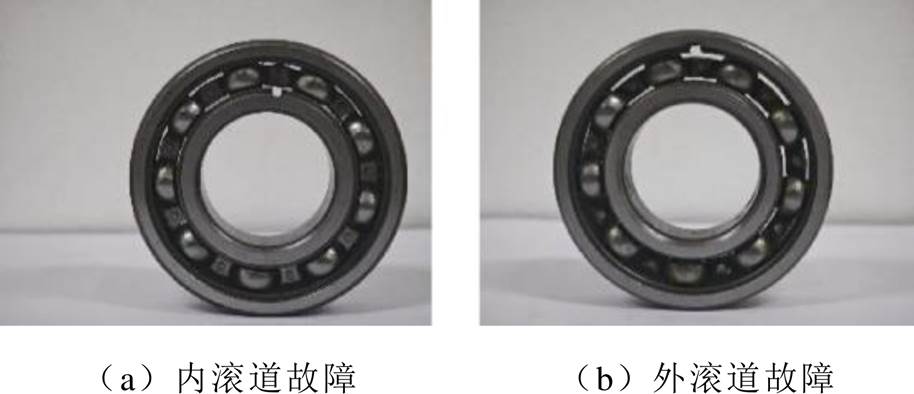
图3 轴承故障
Fig.3 Bearing fault
表1 数据样本信息
Tab.1 Data sample information
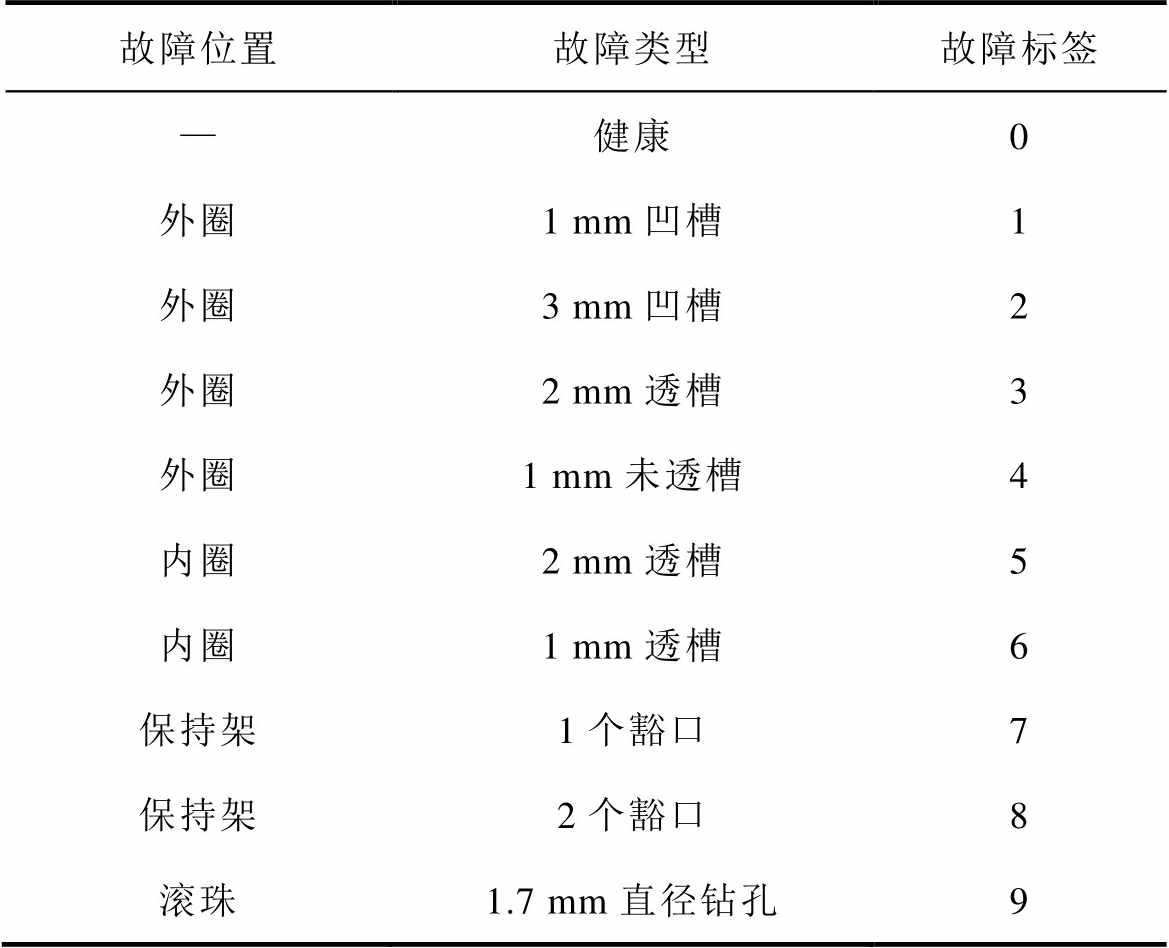
故障位置故障类型故障标签 —健康0 外圈1 mm凹槽1 外圈3 mm凹槽2 外圈2 mm透槽3 外圈1 mm未透槽4 内圈2 mm透槽5 内圈1 mm透槽6 保持架1个豁口7 保持架2个豁口8 滚珠1.7 mm直径钻孔9
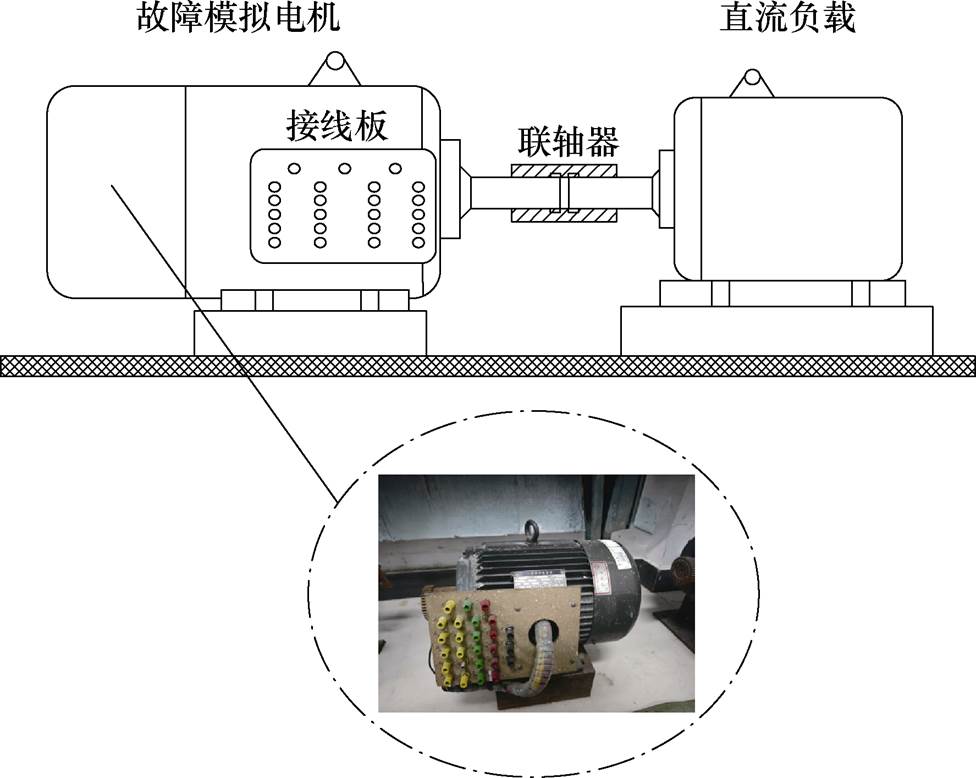
图4 定子与转子故障实验台
Fig.4 Stator and rotor fault test bench
3.2.1 数据预处理与SRG训练
将时域数据进行快速傅里叶变换得到频域数据。样本数据长度为25 000,片段长度为25,损失函数的敏感系数取2,学习率设定为0.001,约束系数设定为0.01,采用Adam算法作为梯度下降算法。SRG损失小于0.6时停止训练。SRG超参数见表2。图5展示了不同故障的RIPS曲线。以外圈凹槽为例,故障程度越严重,RIPS越大,外圈3 mm凹槽相较于1 mm凹槽,RIPS整体提高了两个数量级。
表2 片段残差生成器超参数
Tab.2 Hyperparameter of SRG
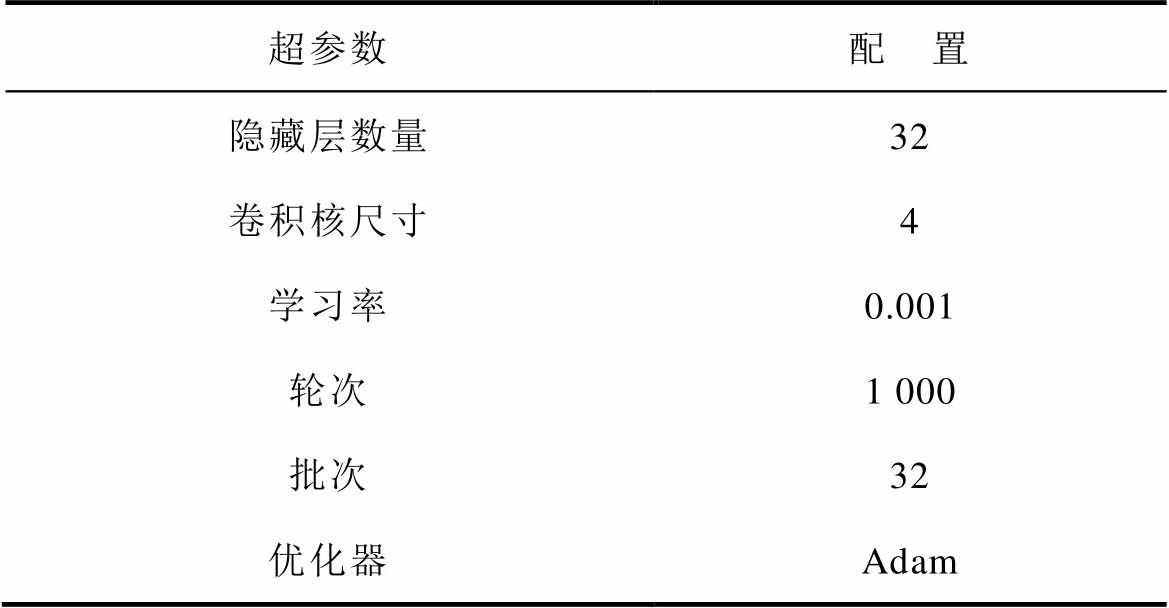
超参数配 置 隐藏层数量32 卷积核尺寸4 学习率0.001 轮次1 000 批次32 优化器Adam
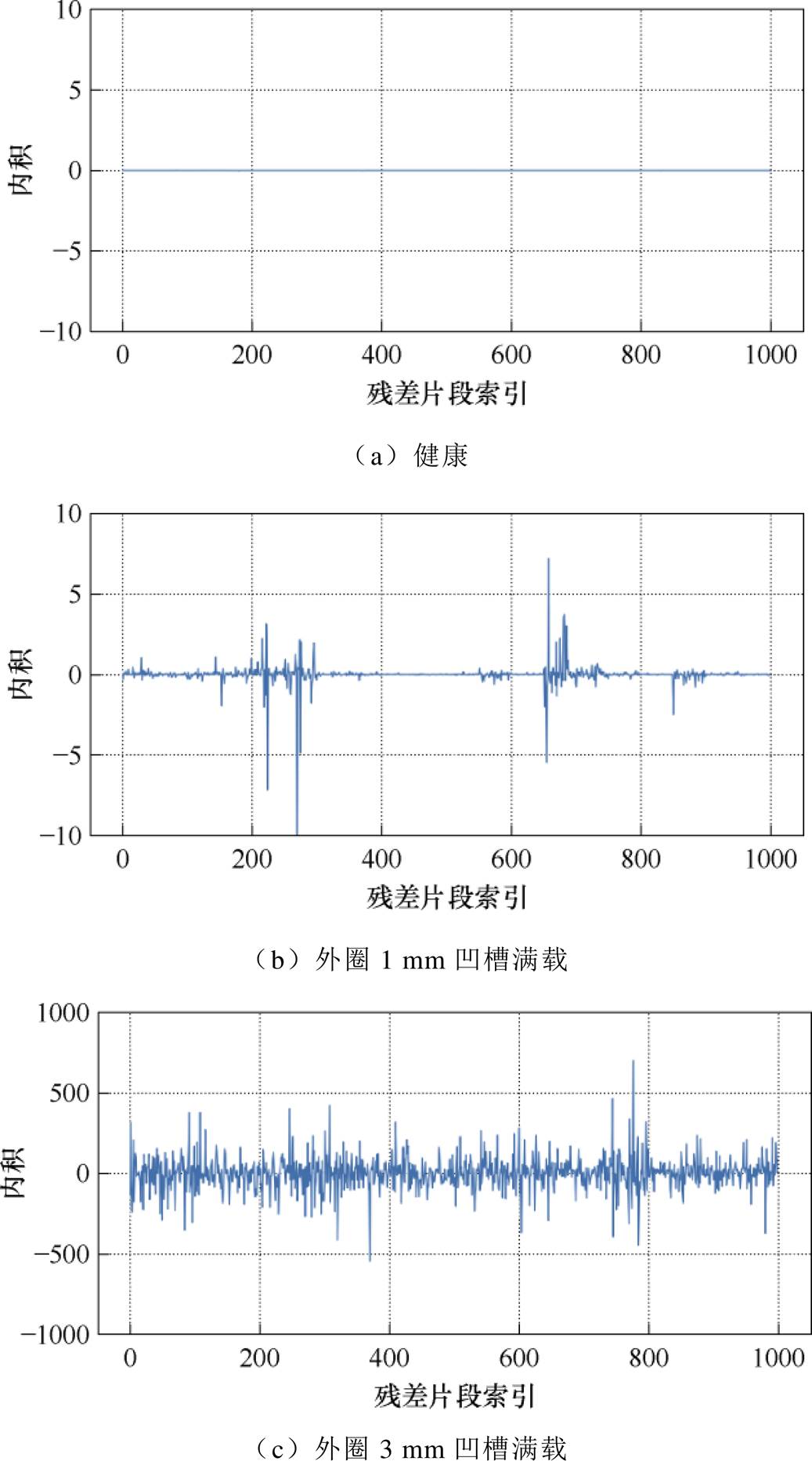
图5 轴承RIPS曲线
Fig.5 RIPS curves of bearing
3.2.2 零样本轴承故障检测
经过特征增强后,故障样本特征突出,利用单变量统计过程方法即可实现故障检测。将RIPS的L1范数作为故障敏感指标,有
 (13)
(13)
式中,X为序列的L1范数;为序列中的元素。
对于零样本检测,一般采用两种指标衡量检测结果,用于衡量对正常数据误报水平的虚警率(False Alarm Rate, FAR)和用于衡量对异常数据漏报水平的故障检测率(Fault Detection Rate, FDR)。FAR越低,表明模型不易将正常数据误识别为异常数据;FDR越高,表明模型不易将异常数据漏识别为正常数据。
不同故障的小提琴图如图6所示。相较于不同程度的故障工况,健康状况下故障敏感指标的中位数约为50,最大值为65,而故障状况下故障敏感指标的最小值为383,存在数量级的差距,因此将故障敏感指标的故障触发阈值设定为(65, 383)时,FAR为0且FDR达到100%。
不同程度故障特征存在显著差异,外圈3 mm凹槽故障L1范数的中位数接近300 000,而外圈1 mm凹槽中位数不到1 000。此外,内圈2 mm凹槽故障整体上比内圈1 mm凹槽故障的故障敏感指标大,保持架也存在类似现象。可以得知,越严重的故障,其RIPS的L1范数也越大,表明其大量窗口残差内积升高,验证了窗口化传播机制。图7比较了外圈3 mm凹槽故障的半载与满载工况,满载工况的故障特征大体上比半载工况更明显,其中位数略高于半载工况。
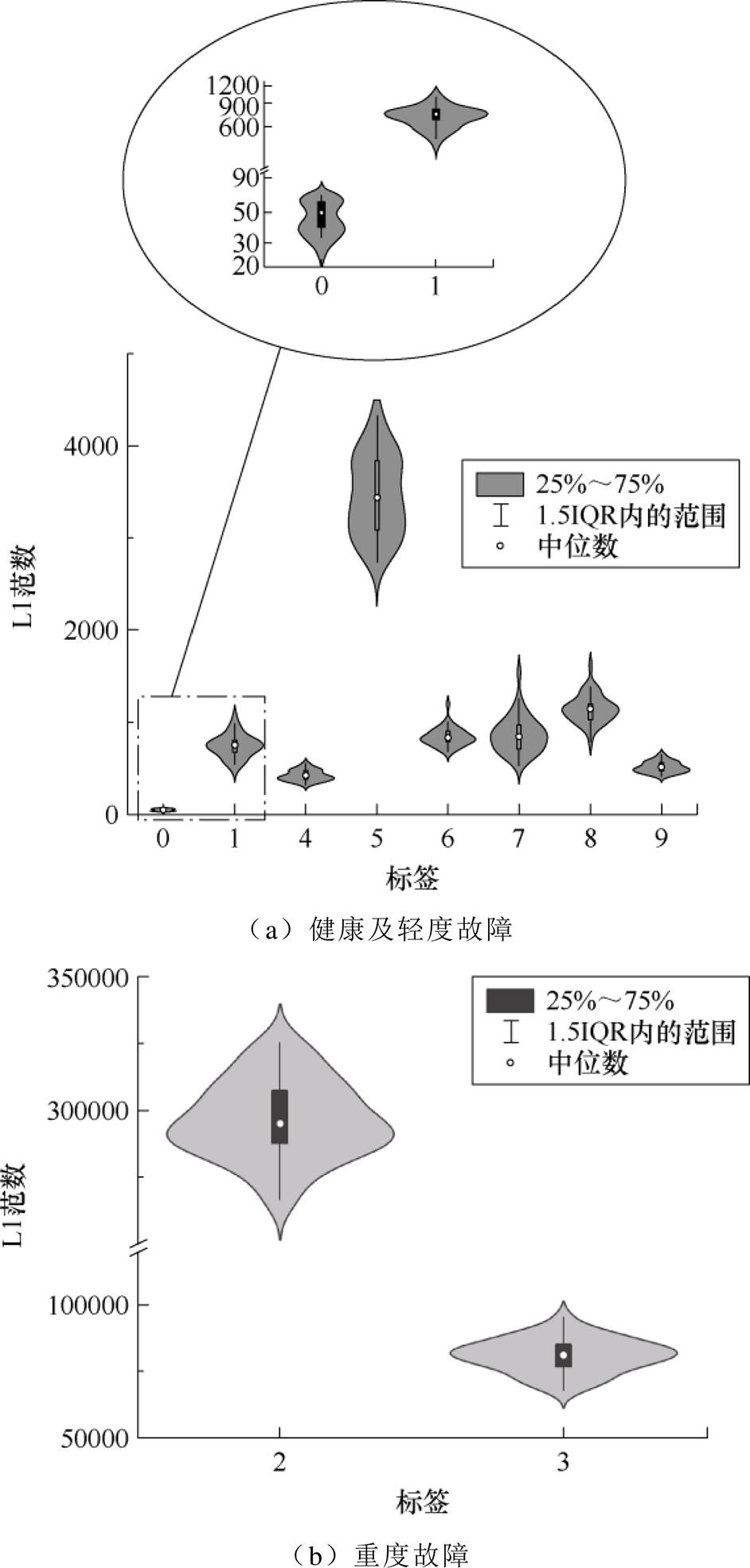
图6 检测指标的小提琴图
Fig.6 Violin chart of detection indicators
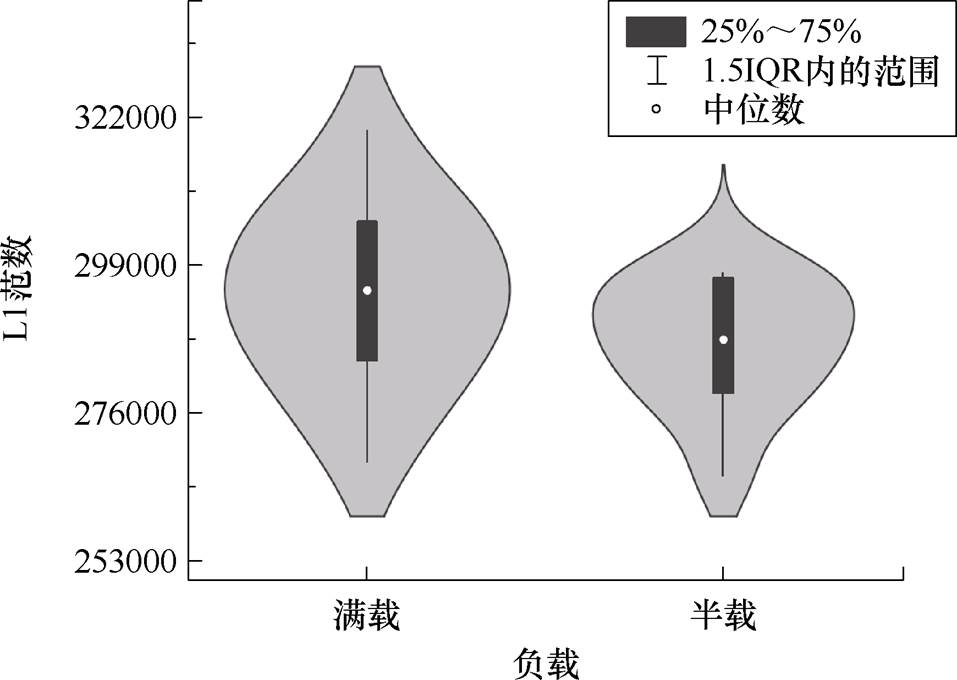
图7 负载对故障特征的影响
Fig.7 The influence of load on fault characteristics
3.3.1 定子故障检测
利用定子的三相电流和三相电压计算其正序、负序、零序电流及电压,电压不平衡分量为
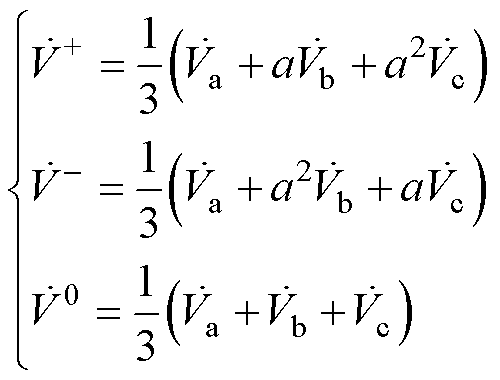 (14)
(14)
式中,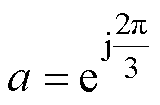 为复数旋转因子;
为复数旋转因子; 、
、 、
、 为三相电压。
为三相电压。
将不平衡分量的频域数据传入SRG,样本长度为20 000,片段长度为25,损失函数的敏感系数取4,学习率设定为0.000 1,约束系数设定为0.01,模型损失小于0.6时停止训练。故障样本的RIPS如图8所示,呈现周期性的内积峰值。
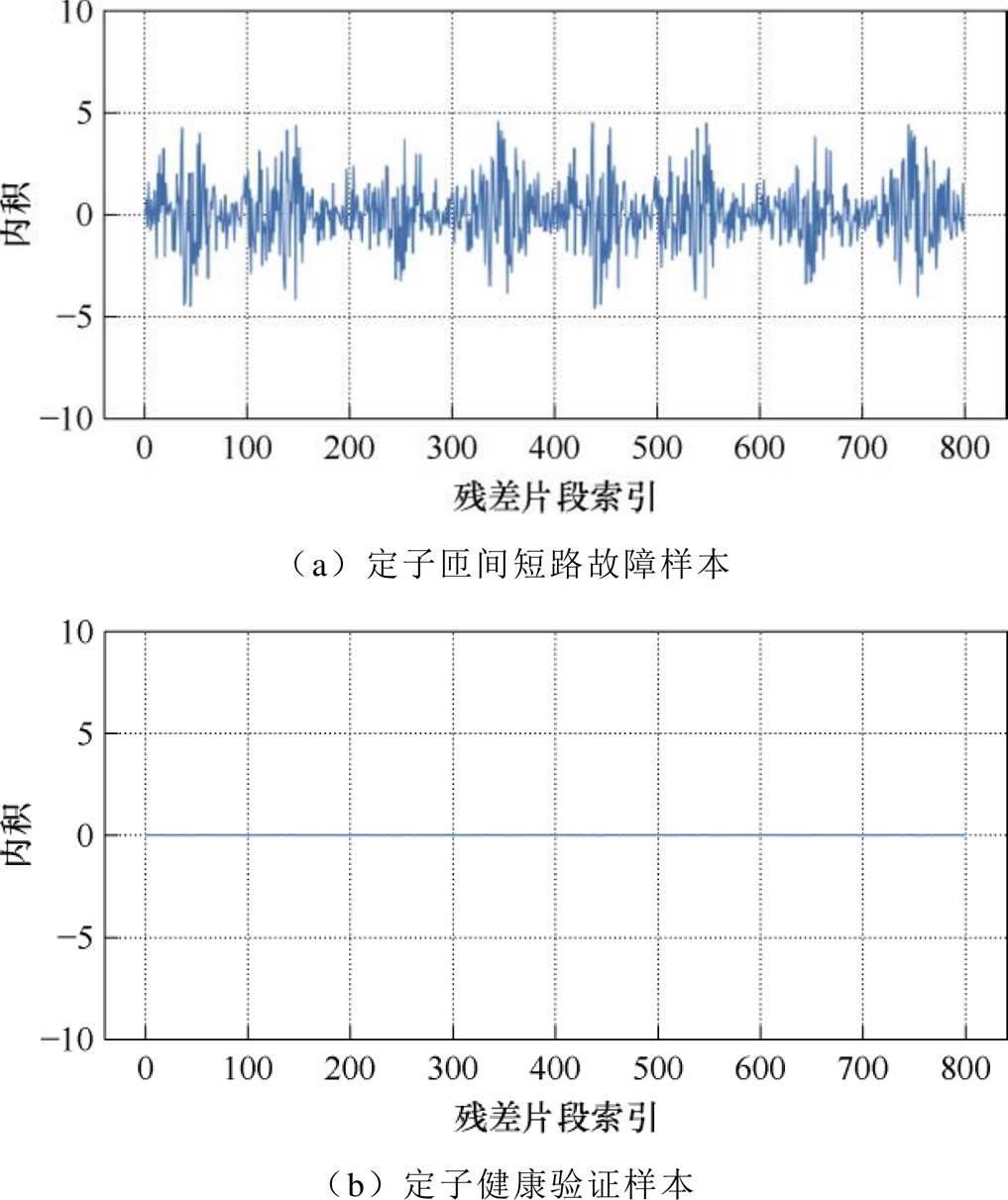
图8 定子RIPS曲线
Fig.8 RIPS curves of stator
相较于基于加速度信号的轴承故障,在SRG的损失基本相同的情况下,基于电流信号的定子匝间短路故障的RIPS数值较小,收敛更为困难,故障特征不明显。表3展示了本文所提RID-FDM与传统故障检测方法按 原则的FAR及FDR,其中PCA与ICA的检测指标为
原则的FAR及FDR,其中PCA与ICA的检测指标为 统计量,AE的检测指标为方均误差。
统计量,AE的检测指标为方均误差。
表3 定子故障检测结果
Tab.3 Results of stator fault detection
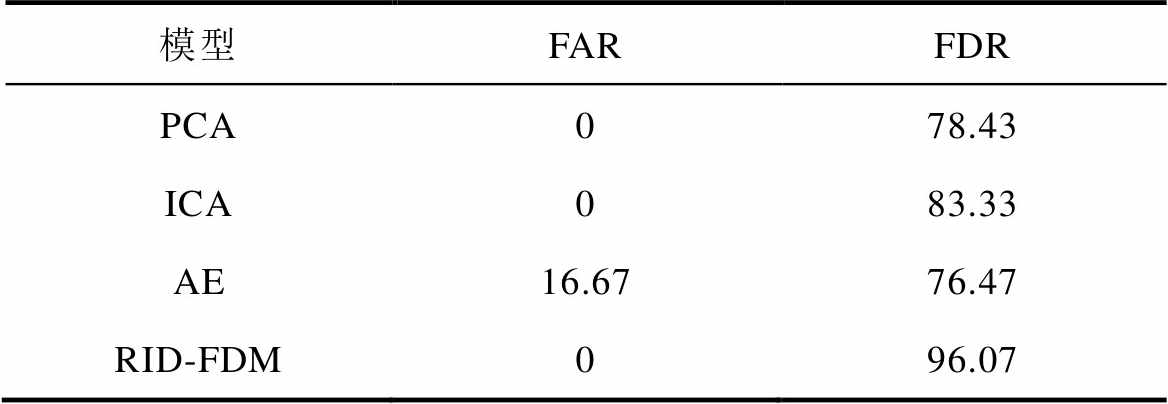
模型FARFDR PCA078.43 ICA083.33 AE16.6776.47 RID-FDM096.07
结果表明,当故障特征不明显时,基于神经网络的AE比基于机器学习的PCA和ICA性能更弱。对于长序列的复杂信号,AE对信号重构时,会产生大量噪声,从而降低性能。而同样基于神经网络的RID-FDM由于序列被切分为短片段,降低了噪声,且由于局部片段的残差放大效应,性能得以大幅提高。
3.3.2 转子故障检测
经3.3.1节验证,基于频域的RID-FDM能够实现定子故障的检测,可以适应故障检测任务。但基于时域的RID-FDM能提供辅助分析价值,有助于分析故障模式。尽管时域数据对噪声更敏感,且复杂故障模式的识别难度较高,但通过计算转子不平衡分量(见式(14))并传入SRG,可提取故障特征的局部波动特性。模型超参数与基于频域的故障检测完全一致,用于验证检测性能的转子故障样本的RIPS如图9所示。

图9 转子RIPS曲线
Fig.9 RIPS curves of rotor
局部损伤引发周期性电动冲击导致所在窗口的残差内积突增加,并通过谐波成分在相邻窗口传播,与理论预测一致。表4对比了模型在时域和频域的表现,并与其他模型的时域性能进行了对比。相较于频域故障序列,时域故障序列的RIPS整体较小,降低了FDR;此外,由于时域数据存在相位,部分健康数据由于相位与训练数据存在显著差异,部分窗口内积上升,这也导致FAR更高。尽管时域的检测性能显著弱于频域数据,但时域RIPS提供了潜在的时域故障特征,存在突出的周期性内积峰值,揭示了故障的时域特征模式。
表4 转子故障检测结果
Tab.4 Results of rotor fault detection
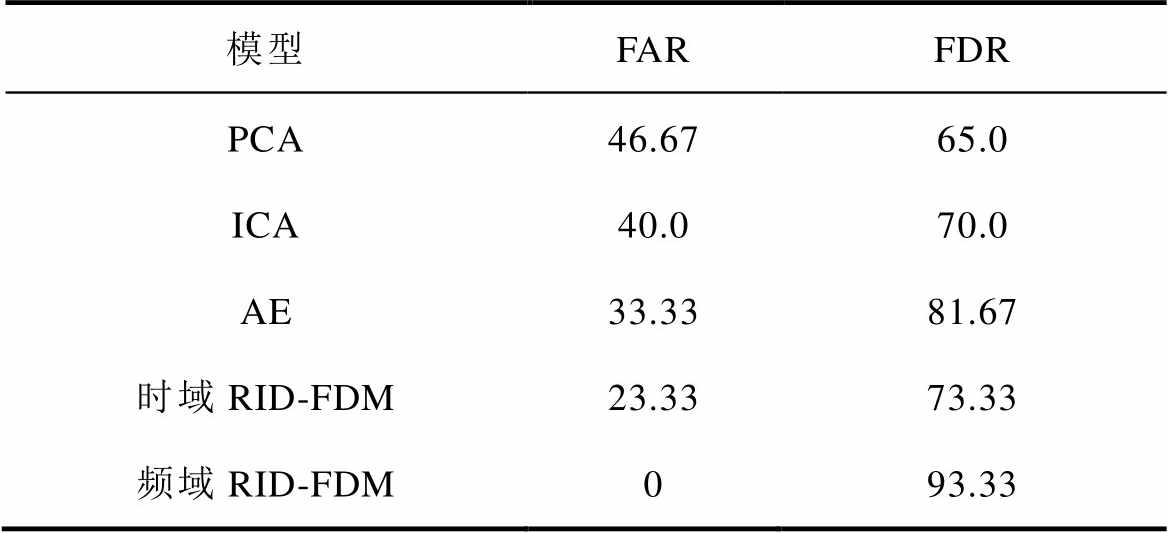
模型FARFDR PCA46.6765.0 ICA40.070.0 AE33.3381.67 时域RID-FDM23.3373.33 频域RID-FDM093.33
3.3.3 模型过拟合与泛化性能分析
在深度学习领域,过拟合指模型在训练数据上表现优异,但在新数据上性能显著下降,导致泛化能力不足。本文提出的RID-FDM通过SRG对健康数据进行识别,使得健康数据的RIPS趋近于零,而故障数据则表现出显著偏离。这种设计本质上是一种针对健康数据的拟合,旨在通过最大化健康与故障数据的RIPS差异,实现高灵敏度的故障检测。由于模型仅利用健康数据进行训练,未接触故障样本,因此可视为一种零样本故障检测方法。
SRG的拟合程度直接影响模型性能:拟合不足,故障数据的RIPS值可能接近健康数据,导致漏报(FDR下降);拟合过度:健康数据的RIPS值波动增大,可能触发误报(FAR上升)。
因此,SRG与损失函数的超参数需与健康数据的分布特性匹配,包括:窗口长度 、隐藏通道数量
、隐藏通道数量 、训练轮次与损失、GRIP Loss的敏感系数。
、训练轮次与损失、GRIP Loss的敏感系数。
以定子匝间短路(频域)为例,超参数对模型的影响如图10所示,表5记录了对照组与实验组的超参数设置。对照组1因模型性能受限,2 000轮迭代后损失为4.16,其余所有实验损失均降低至0.5左右。较长的窗口与过多隐藏通道数量可能使SRG过度拟合健康数据的全局特征,导致故障检测性能下降;较短的窗口与过少隐藏通道数量则会导致过拟合,FAR上升。
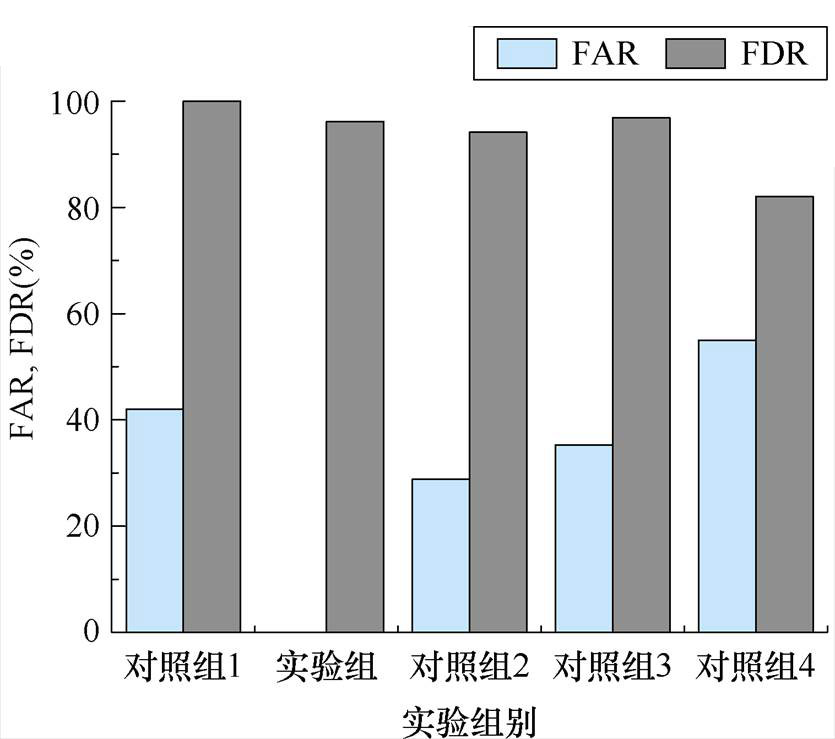
图10 超参数对模型的影响
Fig.10 The influence of hyperparameters on the model
表5 实验设置
Tab.5 Experimental setup
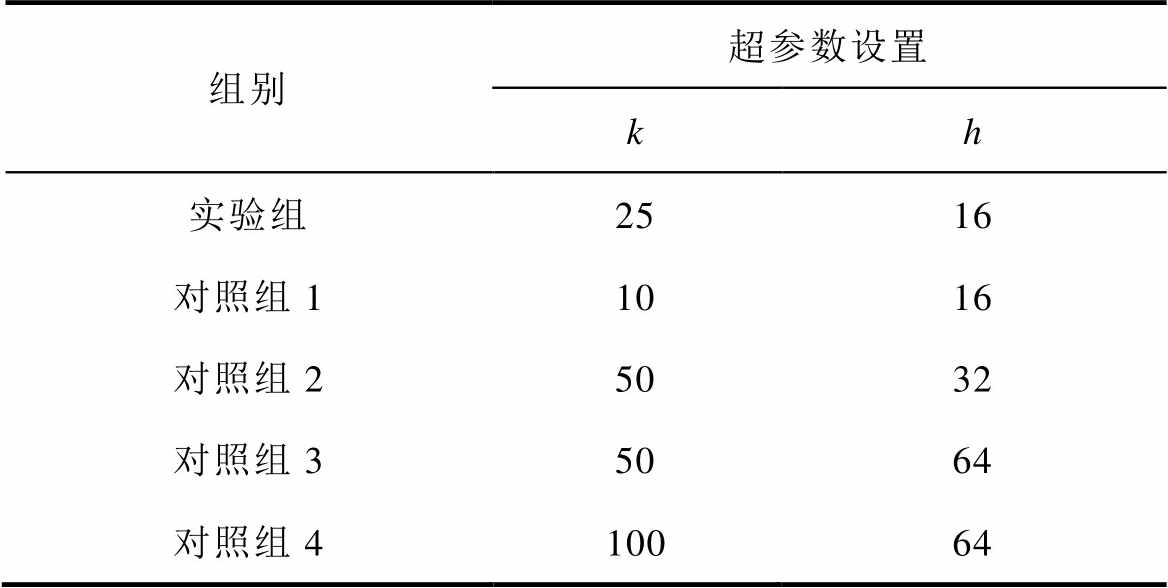
组别超参数设置 kh 实验组2516 对照组11016 对照组25032 对照组35064 对照组410064
经实验验证,窗口长度与隐藏层数分别应取能够使得模型在500~1 000轮内将损失降低至1以内的最短长度与最小层数。适当增大隐藏层数会提高FDR,但FAR也可能会随之上升。
针对不同的数据类型,GRIP Loss的敏感系数也需要对应调整,以转子断条故障为例,若敏感系数取2,则损失下降至100左右之后便难以下降。
本文提出了一种基于残差内积驱动的无监督故障检测模型(RID-FDM),通过轴承局部损伤、定子匝间短路及转子断条三类典型故障的验证,证明了其在故障检测中的高效性与鲁棒性。
本文的贡献主要体现在以下几个方面:
1)提出残差内积驱动分析框架,通过GRIP损失函数约束健康数据与残差的正交性,为无监督故障检测提供了新的思路。
2)设计窗口化残差传播机制,将长序列故障特征解耦为局部片段的残差放大效应,增强对局部异常的敏感性。
3)在零样本故障场景下,模型对轴承、定子、转子故障的故障检测率分别达100%、96.07%与93.33%。
4)该方法完全由数据驱动,仅依赖健康数据,对电机多种故障实现了零样本故障检测。
参考文献
[1] 迟连强, 张殿海, 赵俊清, 等. 旋转电机轴承电蚀损伤机理与缓解措施研究进展[J]. 电工技术学报, 2024, 39(20): 6409-6430.
Chi Lianqiang, Zhang Dianhai, Zhao Junqing, et al. Research progress on the mechanism and mitigation measure of electrical corrosion damage in rotating motor bearings[J]. Transactions of China Electro- technical Society, 2024, 39(20): 6409-6430.
[2] 宋向金, 孙文举, 刘国海, 等. 深度子领域自适应网络电机滚动轴承跨工况故障诊断[J]. 电工技术学报, 2024, 39(1): 182-193.
Song Xiangjin, Sun Wenju, Liu Guohai, et al. Across working conditions fault diagnosis for motor rolling bearing based on deep subdomain adaption network[J]. Transactions of China Electrotechnical Society, 2024, 39(1): 182-193.
[3] Liu Zepeng, Zhang Long. A review of failure modes, condition monitoring and fault diagnosis methods for large-scale wind turbine bearings[J]. Measurement, 2020, 149: 107002.
[4] Yan Ruqiang, Shang Zuogang, Xu Hong, et al. Wavelet transform for rotary machine fault diagnosis: 10 years revisited[J]. Mechanical Systems and Signal Processing, 2023, 200: 110545.
[5] 张辉, 戈宝军, 韩斌, 等. 基于GAF-CapsNet的电机轴承故障诊断方法[J]. 电工技术学报, 2023, 38(10): 2675-2685.
Zhang Hui, Ge Baojun, Han Bin, et al. Fault diagnosis method of motor bearing based on GAF-CapsNet[J]. Transactions of China Electrotechnical Society, 2023, 38(10): 2675-2685.
[6] 姚鹏. 人工智能技术在交流异步电机故障诊断中的应用[J]. 电机与控制应用, 2022, 49(4): 1-9.
Yao Peng. Application of artificial intelligence technology in fault diagnosis of AC asynchronous motor[J]. Electric Machines & Control Application, 2022, 49(4): 1-9.
[7] 樊红卫, 孟瑾, 任众孚, 等. 一种变转速电机转子-轴承系统故障智能诊断方法[J]. 电机与控制学报, 2024, 28(11): 195-210.
Fan Hongwei, Meng Jin, Ren Zhongfu, et al. Intelligent fault diagnosis method of motor rotor- bearing system under variable speed conditions[J]. Electric Machines and Control, 2024, 28(11): 195- 210.
[8] Li Jun, Liu Yongbao, Li Qijie. Intelligent fault diagnosis of rolling bearings under imbalanced data conditions using attention-based deep learning method[J]. Measurement, 2022, 189: 110500.
[9] Gewers F L, Ferreira G R, De Arruda H F, et al. Principal component analysis[J]. ACM Computing Surveys, 2022, 54(4): 1-34.
[10] Dong Wei, Woźniak M, Wu Junsheng, et al. Denoising aggregation of graph neural networks by using principal component analysis[J]. IEEE Transa- ctions on Industrial Informatics, 2023, 19(3): 2385- 2394.
[11] 詹诗语, 高国强, 曹炳磊, 等. 基于深度学习的局部放电分类识别研究综述[J]. 电气工程学报, 2025, 20(2): 371-382.
Zhan Shiyu, Gao Guoqiang, Cao Binglei, et al. Review on classification and recognition of partial discharge rest on deep learning[J]. Journal of Electrical Engineering, 2025, 20(2): 371-382.
[12] 卢太武, 马洪波, 王先芝, 等. 时变工况下基于精细复合多尺度散度熵的旋转机械故障诊断方法[J]. 振动与冲击, 2023, 42(21): 211-218.
Lu Taiwu, Ma Hongbo, Wang Xianzhi, et al. Fault diagnosis method for rotating machinery based on fine composite multi-scale divergence entropy under time-varying working conditions[J]. Journal of Vibration and Shock, 2023, 42(21): 211-218.
[13] 叶旭, 杨炯, 丘志力, 等. 结合拉曼光谱主成分分析-线性判别进行蛇纹石玉产地溯源的探索[J]. 光谱学与光谱分析, 2024, 44(9): 2551-2558.
Ye Xu, Yang Jiong, Qiu Zhili, et al. An exploration of geographic determination of serpentine jade by Raman spectroscopy combined with principal com- ponent analysis and linear discriminant analysis[J]. Spectroscopy and Spectral Analysis, 2024, 44(9): 2551-2558.
[14] Zhu Fa, Gao Junbin, Yang Jian, et al. Neighborhood linear discriminant analysis[J]. Pattern Recognition, 2022, 123: 108422.
[15] Amin M T, Khan F, Ahmed S, et al. A data-driven Bayesian network learning method for process fault diagnosis[J]. Process Safety and Environmental Pro- tection, 2021, 150: 110-122.
[16] Wei Jihong, Chammam A, Feng Jianqin, et al. Power system monitoring for electrical disturbances in wide network using machine learning[J]. Sustainable Com- puting: Informatics and Systems, 2024, 42: 100959.
[17] Jin Xiaohang, Fan Jicong, Chow T W S. Fault detection for rolling-element bearings using multi- variate statistical process control methods[J]. IEEE Transactions on Instrumentation and Measurement, 2019, 68(9): 3128-3136.
[18] Choudhary A, Goyal D, Letha S S. Infrared thermography-based fault diagnosis of induction motor bearings using machine learning[J]. IEEE Sensors Journal, 2021, 21(2): 1727-1734.
[19] Wang Zhile, Yang Jianhua, Guo Yu. Unknown fault feature extraction of rolling bearings under variable speed conditions based on statistical complexity measures[J]. Mechanical Systems and Signal Pro- cessing, 2022, 172: 108964.
[20] Jia Linshan, Chow T W S, Yuan Yixuan. GTFE-Net: a gramian time frequency enhancement CNN for bearing fault diagnosis[J]. Engineering Applications of Artificial Intelligence, 2023, 119: 105794.
[21] Li Pengzhi, Pei Yan, Li Jianqiang. A comprehensive survey on design and application of autoencoder in deep learning[J]. Applied Soft Computing, 2023, 138: 110176.
[22] Yan Shen, Shao Haidong, Min Zhishan, et al. FGDAE: a new machinery anomaly detection method towards complex operating conditions[J]. Reliability Engin- eering & System Safety, 2023, 236: 109319.
[23] 李兵, 梁舒奇, 单万宁, 等. 基于改进正余弦算法优化堆叠降噪自动编码器的电机轴承故障诊断[J]. 电工技术学报, 2022, 37(16): 4084-4093.
Li Bing, Liang Shuqi, Shan Wanning, et al. Motor bearing fault diagnosis based on improved sine and cosine algorithm for stacked denoising autoen- coders[J]. Transactions of China Electrotechnical Society, 2022, 37(16): 4084-4093.
[24] 雷蕾潇, 何怡刚, 姚其新, 等. 基于变权属性矩阵的变压器零样本故障诊断技术[J]. 电工技术学报, 2024, 39(20): 6577-6590.
Lei Leixiao, He Yigang, Yao Qixin, et al. Zero-shot fault diagnosis technique of transformer based on weighted attribute matrix[J]. Transactions of China Electrotechnical Society, 2024, 39(20): 6577-6590.
[25] Zhang Jiusi, Zhang Ke, An Yiyao, et al. An integrated multitasking intelligent bearing fault diagnosis scheme based on representation learning under imbalanced sample condition[J]. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(5): 6231-6242.
[26] Yu Jianbo, Zhou Xingkang. One-dimensional residual convolutional autoencoder based feature learning for gearbox fault diagnosis[J]. IEEE Transactions on Industrial Informatics, 2020, 16(10): 6347-6358.
[27] 梁郑秋, 郝亮亮, 周艳真, 等. 基于卷积神经网络的核电多相无刷励磁系统旋转整流器故障诊断[J]. 电工技术学报, 2023, 38(20): 5458-5472.
Liang Zhengqiu, Hao Liangliang, Zhou Yanzhen, et al. Fault diagnosis of rotating rectifier in nuclear multi- phase brushless excitation system based on convolu- tional neural network[J]. Transactions of China Electrotechnical Society, 2023, 38(20): 5458-5472.
[28] Sonoda S, Murata N. Neural network with unbounded activation functions is universal approximator[J]. Applied and Computational Harmonic Analysis, 2017, 43(2): 233-268.
[29] Yarotsky D. Error bounds for approximations with deep ReLU networks[J]. Neural Networks, 2017, 94: 103-114.
Abstract Industrial motor fault detection faces significant challenges in identifying subtle failure features from sequential data and reducing reliance on expert knowledge. Traditional methods like principal component analysis (PCA) and autoencoders often struggle with limited fault sensitivity and require extensive labeled data for training. This study proposes a residual inner product-driven fault detection model (RID-FDM). This fully data-driven framework achieves high-precision detection of three critical motor faults—localized bearing damage, stator inter-turn short circuits, and rotor bar breakage—using only healthy data for training. By leveraging sequence windowing to partition long-term temporal data into localized fragments, the model introduces a novel residual inner product mechanism to amplify fault-sensitive features while maintaining robustness to normal operational variations.
The core innovations of RID-FDM lie in its three-tiered technical framework. First, the residual inner product analysis (RIPA) framework employs a segment residual generator (SRG) to produce orthogonal residual representations of input fragments, enforced by a global residual inner product (GRIP) loss function that drives the residual inner product sequence (RIPS) of healthy data toward zero. Second, the windowed residual propagation mechanism decomposes long sequences into localized segments, enabling the convolutional SRG to capture spatial-temporal fault patterns while accumulating abnormal evidence through the temporal evolution of RIPS. Third, the model demonstrates universal adaptability to diverse fault types by leveraging the generic feature representation capacity of residual inner products, requiring hyperparameter adjustments rather than architectural redesign. This design significantly enhances engineering applicability in industrial settings with limited fault samples and stringent real-time requirements.
Extensive experiments validate RID-FDM's superiority across benchmark datasets. The model achieves 100% detection accuracy for bearing faults, 96.07% for stator faults, and 93.33% for rotor faults in zero-shot scenarios. Notably, the method does not require prior knowledge of fault during training and operates in real time with minimal computational overhead. The proposed framework offers a scalable solution for predictive maintenance systems where labeled fault data is scarce and rapid response is critical.
keywords:Asynchronous motor, fault detection, neural network, unsupervised learning, zero-shot detection
DOI: 10.19595/j.cnki.1000-6753.tces.250501
中图分类号:TM306+.1
国家自然科学基金资助项目(51277077)。
收稿日期 2025-03-28
改稿日期 2025-05-06
许伯强 男,1972年生,教授,博士生导师,研究方向为电机状态监测与故障诊断。E-mail: xbq_ncepu@126.com
熊 鹏 男,2000年生,硕士研究生,研究方向为电机故障诊断。E-mail: 1054139382@qq.com(通信作者)
(编辑 崔文静)