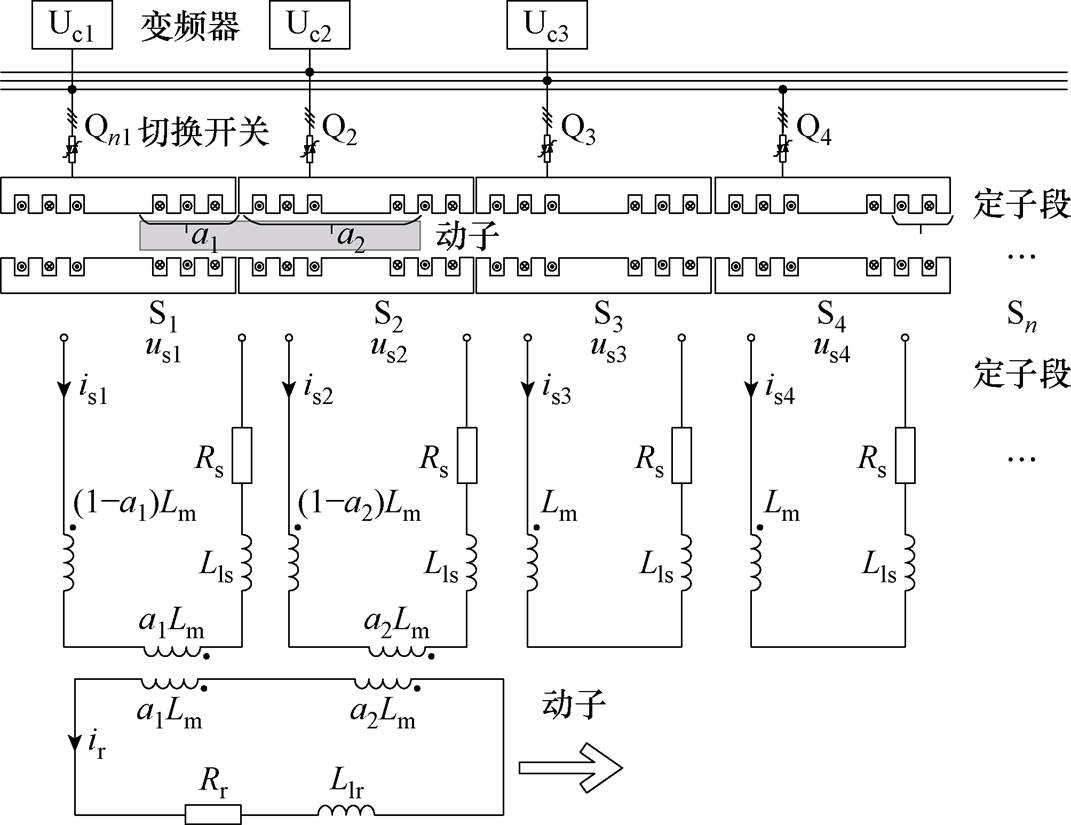
图1 长定子直线感应电机拓扑及等效电路
Fig.1 The topology and equivalent circuit of LIMs
摘要 针对直线电机在地面超声速(约340 m/s)运行时激波非定常气动力扰动导致速度传感器失效、速度易失控问题,该文提出一种基于多元电压特征提取的直线感应电机速度观测方法。首先,通过构建分段函数融合相邻定子段的dq轴电压,消除单个定子段电压的直流偏置,重构直线电机动子连续速度特征;其次,利用定子段切换时刻的电压变化特性,动态提取速度观测器参数,降低对电机参数准确性的依赖;最后,设计dq轴观测速度加权融合算法,通过动态调整权重系数提升直线电机速度观测精度。提出的速度观测方法适用于高速且高加/减速工况,在惰行和低速时具有一定的局限性,但不影响超声速时速度观测。在Matlab/Simulink和超高速实验平台对提出速度观测方法的有效性、精度和局限性进行了验证,在高速且高加速/减速工况下,仿真中速度观测平均误差小于0.8%,实验中速度观测与传感器测量值的平均误差小于1.1%,实现了直线感应电机超声速下速度的准确观测。所提方法可有效解决超声速激波不确定扰动对速度测量的影响,为直线电机更高速度运行提供速度观测基础。
关键词:直线感应电机 速度观测 超声速 电压特征提取
直线感应电机具有动子结构简单、易模块化且无需传动机构等优点,在电磁推进地面高速实验设施或航天电磁发射等领域具有良好的应用前景[1-2]。当直线电机在地面超声速(约340 m/s,海拔高度<100 m,温度<30℃)运行时,激波非定常气动力会导致动子产生剧烈抖振,对磁编码、光电编码等速度位置测量设备造成严重干扰,进而引发电机速度失控,是阻碍直线电机超声速稳定运行的关键瓶颈问题之一,亟待突破和解决。
当前,针对高速电机速度观测方法的研究主要有高频信号注入法和模型观测法。高频信号注入法通常可分为旋转高频电压信号注入法和脉冲高频电压信号注入法。文献[3]提出了一种基于高频信号注入的永磁同步直线电机速度观测方法,并对位置角误差实施了补偿。文献[4]则借助改进的模型预测控制(Model Predictive Control, MPC)与脉振高频注入法相结合的方式,增强了永磁同步电机无传感器控制的动态响应性能以及抗负载扰动能力。高频信号注入法的优点为不依赖电机的基波反电动势,在低速时也能实现良好的位置和速度估计,但该方法在高速运行时易受高频噪声、带宽、逆变器最大输出电压等多种因素制约[5]。模型观测法无需额外注入信号[6-7],主要包括全阶观测器、模型参考自适应系统(Model Reference Adaptive System, MRAS)以及滑模观测器(Sliding Mode Observer, SMO)[8-10]等。MRAS方法是一种基于稳定性理论的辨识手段,能够确保估计结果的渐近收敛,结构简单,易于实现,不过其对电机参数的依赖性较强,抗干扰能力也相对较弱。SMO的鲁棒性要优于MRAS,文献[9]中提出的基于改进指数趋近律的滑模观测器,在电机高速运行时展现出了较高的转速观测精度和收敛速度。文献[10]提出了一种感应电机负载变化情况下的无传感器滑模控制策略,将转速观测范围拓展到了定子电流低速运行工况。文献[11]把滑模变结构控制与MRAS相结合,既保留了MRAS自身的优点,又具备滑模控制对参数不敏感的特性。然而,基于模型的无速度传感器控制方法难以适应参数快速时变且不确定扰动较大的系统。为了解决基于模型的无速度传感器控制方法抗扰性弱、鲁棒性低的缺点,文献[12-13]将自抗扰控制(Active Disturbance Rejection Control, ADRC)技术应用于电机无速度传感器控制,通过对系统存在的非线性及其他扰动因素进行补偿,提高了速度观测的精度和抗干扰的快速响应能力。文献[14-15]将自抗扰控制技术应用于同步电机无传感器控制,但存在自抗扰控制器参数难以整定的问题。文献[16-17]将遗传算法和人工智能技术应用于自抗扰电机控制系统,利用深度强化学习(Deep Reinforcement Learning, DRL)方法参与自抗扰控制器参数的自动调优,有效降低了计算量,提高了参数的灵敏度。然而,直线感应电机在超声速运行时,分段结构导致参数非线性快速时变,现有观测方法难以适用。
本文依据直线感应电机动子高速进入和离开定子段时定子电压快速变化特性,提出了一种基于多个相邻定子段电压特征提取的超声速直线感应电机速度观测方法。该方法能够有效抑制快速动态切换过程参数快速时变对速度观测的影响,具有精度高、参数敏感度低等优点。
长定子直线感应电机(Long primary linear Induction Motor, LIM)采用定子分段结构,由变频器(Uc1、Uc2、Uc3)、定子段(S1、S2、…、Sn)、动子、切换开关(Q1、Q2、…、Qn)和测量控制设备组成,其拓扑及等效电路如图1所示。直线感应电机通过控制定子段电流和供电切换开关调控动子速度,定义an为动子覆盖第n个定子段比例系数,该系统可表征动子高速进出定子段时互感快速变化特性。
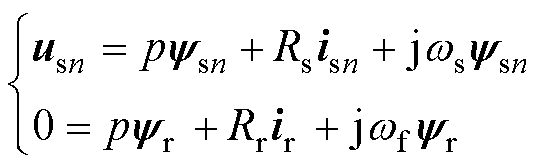
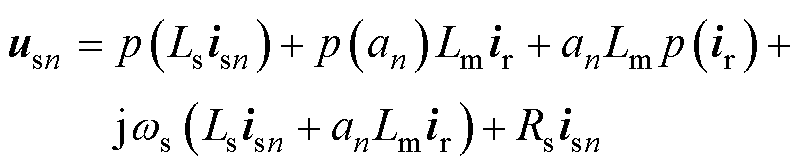
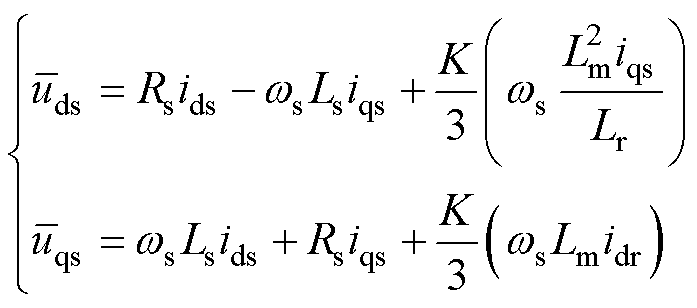
由直线感应电机等效电路可知,在同步坐标系下,第n个定子段电压和动子电压方程为
图1 长定子直线感应电机拓扑及等效电路
Fig.1 The topology and equivalent circuit of LIMs
 (1)
(1)
式中,p为微分算子;j为虚数;Rs、Rr分别为定子、动子电阻;ws为定子角频率;wf为转差角频率;ysn、usn、isn分别为第n个定子段的磁链、电压和电流;yr、ir分别为动子的磁链和电流。
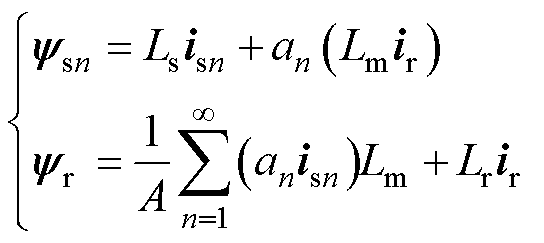
直线感应电机动子磁链与所有定子互感磁链之和相关,第n个定子和动子磁链计算方法为
 (2)
(2)
式中,Ls为单段定子电感;Lm为励磁电感;Lr为动子电感;A为常数,所有定子覆盖比例之和a1+a2+ a3+…+an=A。
当所有定子段电流给定值相同且能够快速跟踪给定值时,式(2)可被简化[18]为
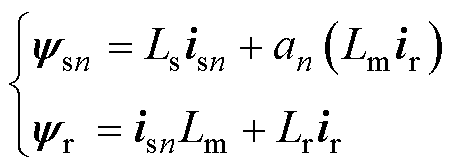 (3)
(3)
整理式(1)和式(3),可得到直线感应电机第n个定子段电压与定、动子电流关系为
 (4)
(4)
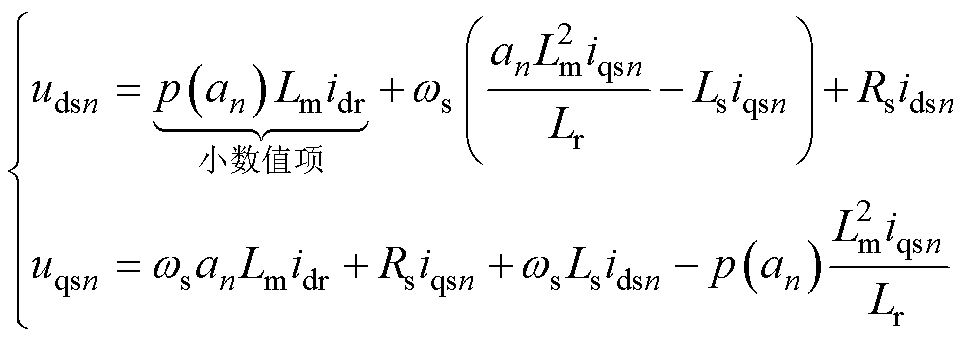
在动子磁场定向控制策略下,当定子电流isn和转子磁链yr保持恒定时其微分项可忽略,q轴动子磁链yqr可假设为零,简化式(4)可得直线感应电机第n个定子段dq轴电压方程为
 (5)
(5)
式中,idr为动子d轴电流;idsn、iqsn分别为第n个定子d轴、q轴电流。
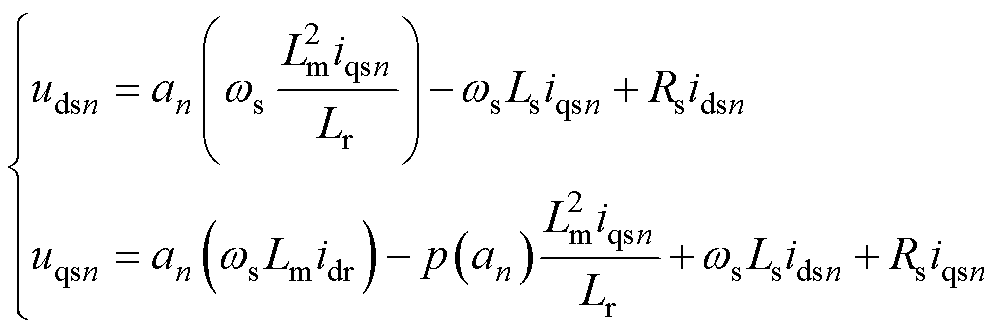
式(5)中,Lmidr数值较小,对d轴电压观测影响可忽略,q轴电压中ws在高速时值较大,wsanLmidr不能忽略,简化后定子电压方程为
 (6)
(6)
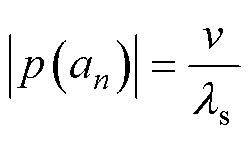
由式(6)可知,动子覆盖第n个定子段比例系数an包含动子速度信息,当动子进入第n个定子段时,an由0变化为1,当动子离开第n个定子段时,an由1变化为0。an变化率与动子速度v成正比,有
 (7)
(7)
式中,ls为单个定子段长度。
将an作为中间量,建立直线感应电机定子段电压udsn、uqsn和速度v的观测模型分别为
 (8)
(8)
 (9)
(9)
式中,kd1、kd2、kq1、kq2、kq3为速度观测系数。
为了实现动子速度的观测,传统方法将式(8)和式(9)进行欧拉离散化变换,由直线感应电机第n个定子段d轴和q轴电压变化特性得到动子速度,有
 (10)
(10)
 (11)
(11)
式中,vdsn和vqsn分别为第n个定子段d轴和q轴观测速度;k为第k个计算周期;Ts为离散计算步长。
传统方法较难观测直线感应电机动子速度,原因如下:首先,单个定子电压在动子全覆盖和供电切换时无法观测动子速度;其次,式(10)和式(11)中3个观测系数kd1、kq1、kq2严重依赖电机参数;最后,电机动子高加/减速进入和离开定子段时dq轴电压具有直流偏量。图2为超高速直线感应电机单个定子段d轴电压特征,包括四个阶段:第1阶段动子进入定子(an从0至1)、第2阶段定子全覆盖(an为恒定1)、第3阶段为动子离开定子(an从1至0),第4阶段供电切换。由图2可知,定子电压在第2和第4阶段无法观测动子速度,仅第1和第3阶段可观测速度信息,且不同阶段具有显著的直流偏量。因此,需结合多个定子段电压特性,提出基于多元电压数据特征提取的速度观测方法,提高速度观测的精度并降低对电机参数的精度依赖。
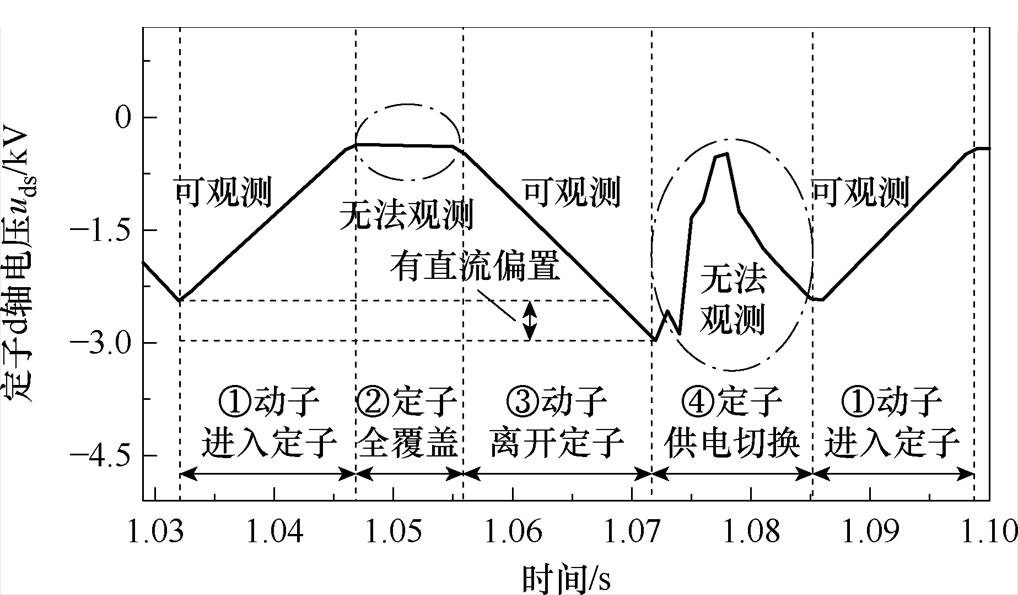
图2 动子高速运动时定子段电压特征分析
Fig.2 Analysis of stator voltage characteristics during high-speed motion of the mover
直线感应电机动子在高速运动时,多台变频器依据动子所在位置对相应的定子段交替供电,如图1所示。本文以3台变频器供电为例,相邻3个定子段的dq轴测量电压分别为uds1, uds2, uds3、uqs1, uqs2, uqs3。由式(8)和式(9)可推导出dq轴电压的直流偏置 、
、 为
为
 (12)
(12)
式中,K为变频器供电3个定子段被动子覆盖的比例之和,a1+a2+a3=K。
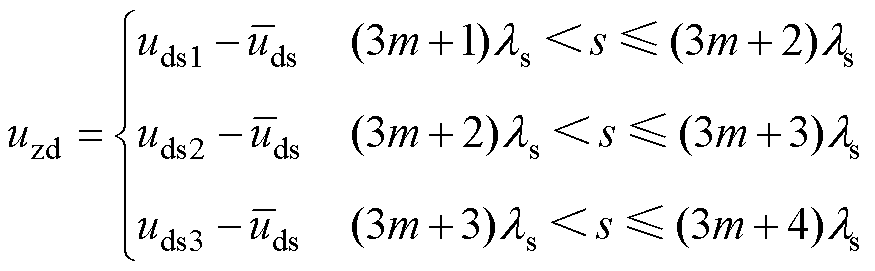
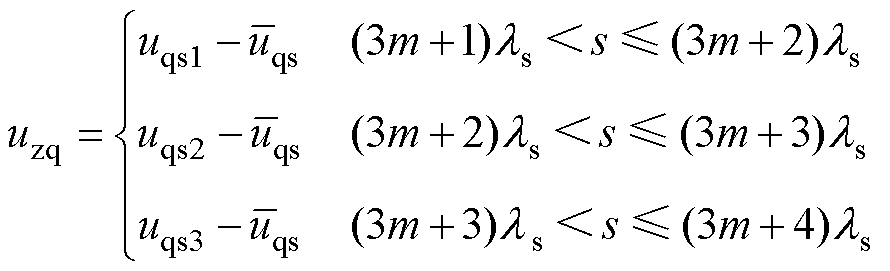
依据3个定子段的dq轴测量电压、直流偏置及动子位置s构造分段函数,进而得到用于速度观测的dq轴多元融合电压uzd、uzq为
 (13)
(13)
 (14)
(14)
式中,s为动子前端的位置(以起始点为零点);ls为定子段长度;m为定子段编号。
由式(13)和式(14)可提取出具有连续速度信息的d轴和q轴多元电压,图3为动子离开定子段过程的d轴多元电压波形。由图3可知,第1、2、3阶段分别为动子离开3台变频器供电的定子段S1、S2、S3电压波形。该方法可有效消除单个定子段电压直流偏置,并且解决定子段全覆盖和供电切换时定子段电压测量值无法观测速度的问题。
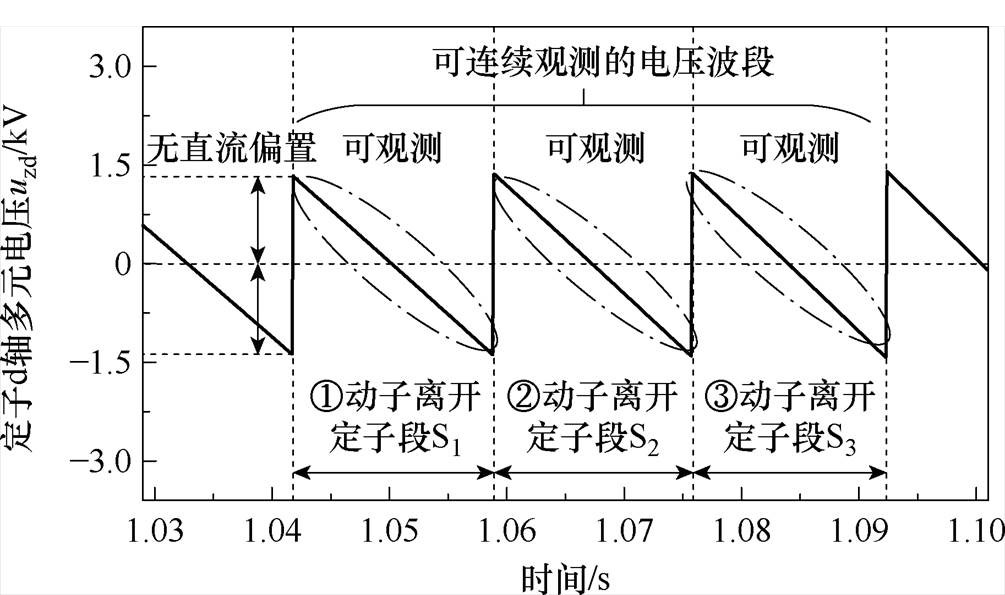
图3 动子高速运动时定子d轴多元电压波形
Fig.3 Multivariate stator voltage waveform during high-speed motion of mover
采用直线感应电机多元电压uzd、uzq特征提取方法可得到动子速度信息。首先,整理式(8)、式(9)、式(13)和式(14),可得直线感应电机多元电压与速度关系为
 (15)
(15)
 (16)
(16)
式中,kzd、kzq1和kzq2为速度观测参数;as为多元融合电压的动子覆盖定子比例。
其次,将式(13)、式(14)中微分项欧拉离散化可得直线感应电机速度观测模型为
 (17)
(17)
 (18)
(18)
式中,vzd(k)、vzq(k)分别为第k周期的d、q轴多元电压观测速度;uzd(k)、uzq(k)分别为第k周期d、q轴多元电压。
式(17)和式(18)中kzd、kzq1和kzq2为速度观测参数,该参数与直线感应电机的励磁电感Lm、动子电感Lr、动子d轴电流idr和定子q轴电流iqs相关。直线感应电机高速运动时参数变化较大,相关参数难以直接准确获取,影响速度观测精度。本文依据多元电压变化特性提取速度观测器参数,降低速度观测对参数准确性的依赖。
速度观测系数kzd提取方法如下,由式(15)可知,由于速度在短时内不会发生突变,且 变化范围恒定(记为
变化范围恒定(记为 ),所以kzd可用d轴多元电压uzd在一个供电切换周期变化值
),所以kzd可用d轴多元电压uzd在一个供电切换周期变化值 表示,如式(19)和图4所示。
表示,如式(19)和图4所示。
 (19)
(19)
式中,i为第i次供电切换;ti为第i次供电切换发生的时间。第i次供电切换时d轴观测系数 等于此时电压uzd变化值
等于此时电压uzd变化值 。
。
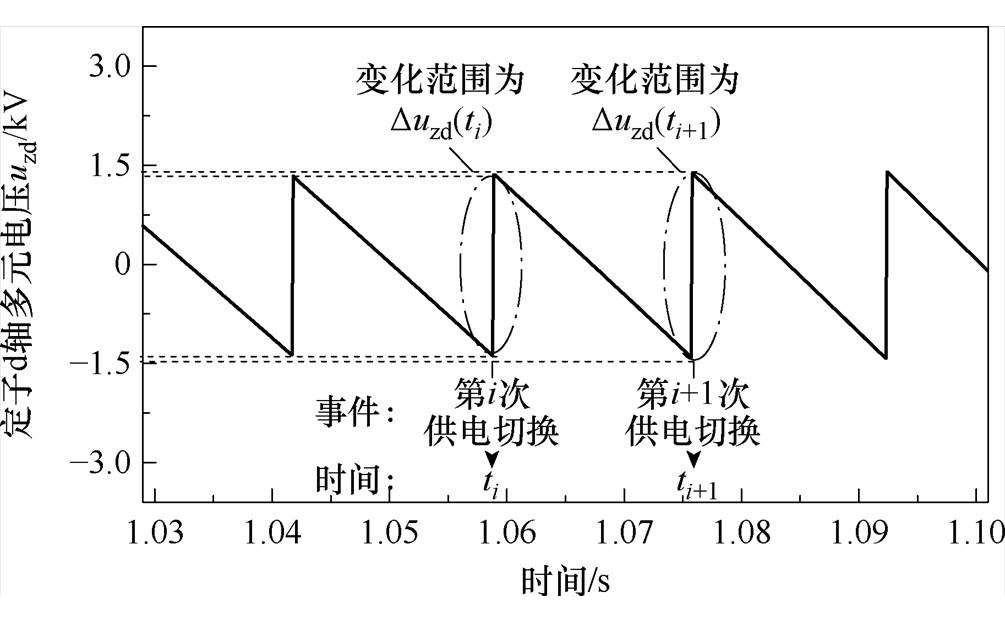
图4 供电切换时定子d轴多元电压uzd变化范围
Fig.4 The variation range of the multivariate voltage uzd during switching process
同理,根据式(16)可知,速度观测系数kzq1的估计方法如式(20)所示,第i次供电切换时q轴多元电压uzq的变化范围如图5所示。
 (20)
(20)
式中, 为ti时q轴观测系数
为ti时q轴观测系数 ;
; 为ti时q轴观测系数kzq2;
为ti时q轴观测系数kzq2; 为ti时供电切换周期变化值
为ti时供电切换周期变化值 ;
; 为前一周期的速度。
为前一周期的速度。
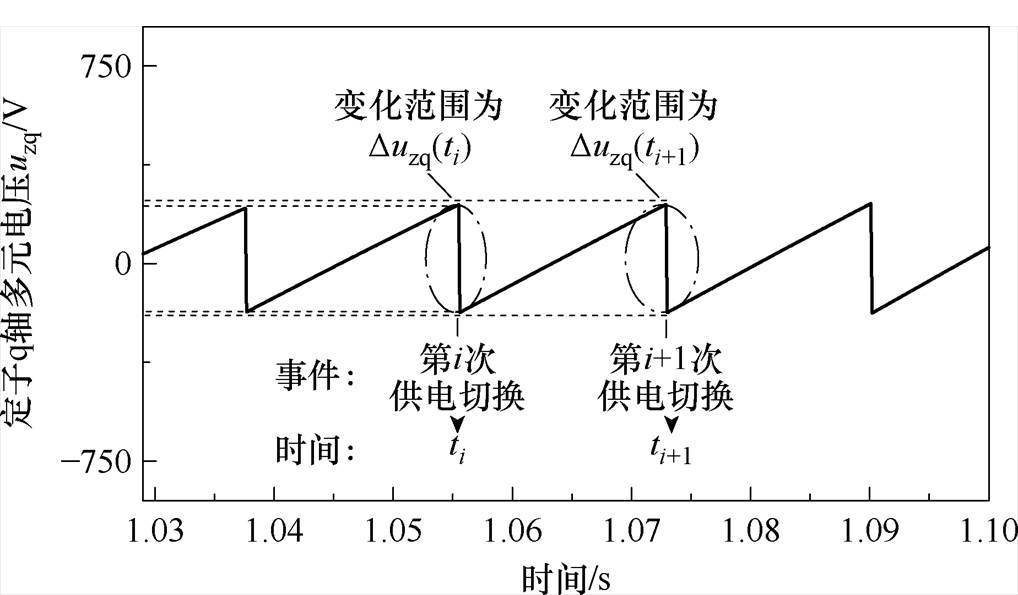
图5 供电切换时q轴多元电压uzq变化范围
Fig.5 The variation range of the multivariate voltage uzq during switching process
由于式(16)中kzq2不随速度变化,因此可假设其为近似恒定值,有
 (21)
(21)
由式(15)和式(16)可知,当直线电机高加速运行时,速度与定子电流频率ws随时间变化,导致uzd和uzq变化范围改变。在供电切换时可测量多元电压锯齿波变化范围,在非供电切换时采用插值方法估计速度观测系数kzd和kzq1分别为
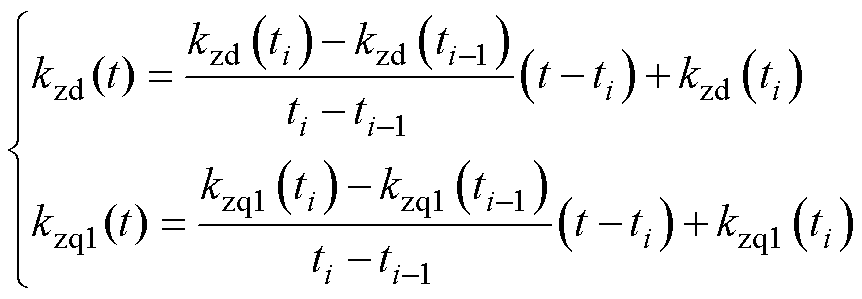 (22)
(22)
基于多元电压特征提取的速度观测方法流程如图6所示,依据多个定子段测量电压、动子位置和定子段切换时刻,获得速度观测系数kzd、kzq1和kzq2,根据式(17)和式(18)计算观测速度vzd(k)和vzq(k)。相比单定子电压-速度观测方法,基于多元电压特征提取的速度观测方法不依赖直线电机精准参数,有效提高了速度观测精度。
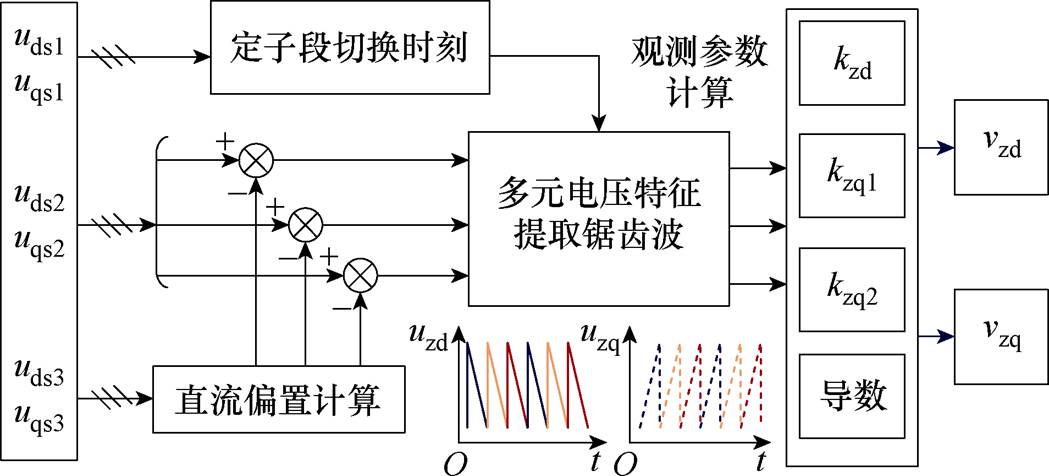
图6 基于多元电压特征提取的速度观测方法流程
Fig.6 Velocity estimation method based on multivariate voltage feature extraction
基于多元电压特征提取的速度观测方法可获得d轴观测速度vzd(k)和q轴观测速度vzq(k),为了进一步提升速度观测精度,本文提出d轴和q轴观测速度加权融合算法,详细流程如下:
(1)在第k控制周期,使用线性预测方法给出第k周期的预测速度vp(k)为
 (23)
(23)
式中,vob(k-1)为第k-1周期的融合观测速度;vob(k-2)为第k-2周期的融合观测速度。
(2)计算预测速度vp(k)与d轴观测速度vzd(k)和q轴观测速度vzq(k)的误差,有
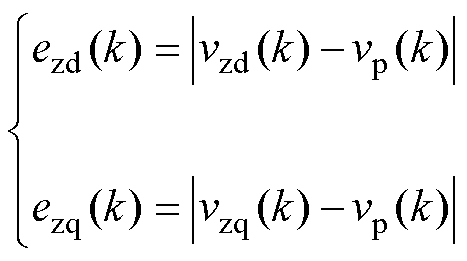 (24)
(24)
式中,ezd(k)为第k周期vzd(k)与vp(k)的误差;ezq(k)为第k周期vzq(k)与vp(k)的误差。
(3)得到观测误差后,d轴与q轴观测速度的权重依据误差反比原则进行量化分配,有
 (25)
(25)
式中,lzd(k)为第k周期vzd(k)的权重;lzq(k)为第k周期vzq(k)的权重。
式(25)确保了当d轴观测误差ezd(k)远小于q轴误差ezq(k)时,d轴权重lzd(k)趋近于1,融合速度主要信赖d轴观测结果;反之,则信赖q轴结果,该方法实现了权重的自适应、量化调整。
(4)根据权重将dq轴观测速度加权融合,得第k周期的融合观测速度vob(k)为
 (26)
(26)
本文提出的基于多元电压特征提取的超声速直线感应电机速度观测方法如图7所示,主要包括超声速直线电机电压采集、多元电压融合、速度观测器参数估计、速度观测、速度信息加权融合等部分,实时观测直线感应电机动子速度,主要流程如下:
(1)实时采集定子分段直线感应电机的3台变频器电压,并将其变换到同步坐标系。
(2)采用式(12)计算单个定子段电压直流偏置,由式(13)和式(14)计算多元电压uzd和uzq,提取出具有连续速度信息的特征电压。
(3)由定子段切换时刻的电压变化特性,依据式(19)~式(22)实时计算3个速度观测参数。
(4)根据d轴和q轴多元电压速度观测方法式(17)和式(18),计算d轴和q轴多元电压观测的速度vzd和vzq。
(5)由式(23)获取预测速度,式(25)计算dq轴观测速度权重。依据权重将dq轴观测速度加权融合得到融合观测速度,如式(26)所示,从而实现基于多元电压特征提取的超声速直线电机无传感器速度观测方法。
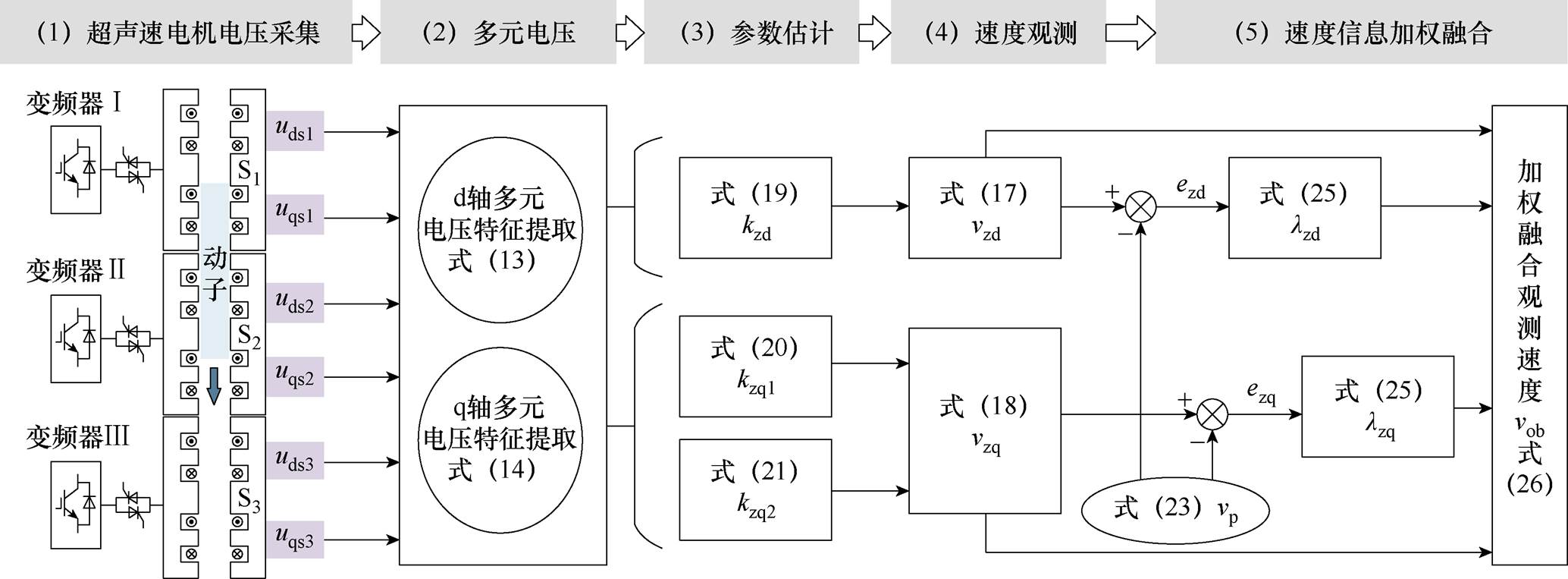
图7 基于多元电压特征提取的超声速直线感应电机速度观测方法
Fig.7 Velocity observation method for supersonic LIMs based on multivariate voltage feature extraction
为了验证超声速直线感应电机多元电压特征提取速度观测方法的有效性,搭建了Matlab/Simulink仿真平台,包括电机控制模块和分段供电直线感应电机模型,在动子进出定子段时变频器输出六相电压变化过程如图8所示。定子段S1由变频器Ⅰ供电,定子段S2由变频器Ⅱ供电,定子段S3由变频器Ⅲ供电。动子位置向前移动,动子覆盖定子比例an变化,导致对应的变频器输出电压也随之明显变化,电压包络线呈凹槽状,依据此特性可观测动子速度。
采用间接磁场定向方法将3个变频器供电定子段电压进行同步变换,得到超声速直线感应电机d轴多元电压uzd和q轴多元电压uzq波形如图9所示。图9a中,usd1、usd2、usd3为3个变频器d轴电压,反映动子离开定子段S1、S2、S3时d轴电压变化特性。依据动子位置和式(13)、式(14)将3个电压进行融合,可得到d轴多元电压uzd,该电压是包含连续速度特征信息的锯齿波。图9b为q轴多元电压,其计算过程与d轴相似,q轴多元电压反映动子进入定子段S1、S2、S3时电压变化的特性。

图8 超声速直线感应电机电压随动子位置变化特性
Fig.8 The voltage of supersonic LIMs varies with the position of the mover
随着动子速度v提高,定子段供电角速度 增大,根据式(15)和式(16)可知,kzd和kzq1也逐渐增大,体现在图9中多元电压变化范围
增大,根据式(15)和式(16)可知,kzd和kzq1也逐渐增大,体现在图9中多元电压变化范围 和
和 增加,仿真结果与速度参数估计方法的理论推导相符合。基于d轴电压的观测速度vzd仿真结果如图10所示,平均观测误差小于1.2%。图中,vactual为实际速度。基于q轴电压的观测速度vzq仿真结果如图11所示,由于q轴需要估计2个参数,因此观测误差较d轴大,误差小于1.9%。根据图10和图11观测速度仿真结果可知,由于d轴和q轴两种观测速度分别反映动子进入和离开定子段的不同阶段,在不同时刻两种速度观测方法误差不同,使用数据融合算法可提高速度观测精度。
增加,仿真结果与速度参数估计方法的理论推导相符合。基于d轴电压的观测速度vzd仿真结果如图10所示,平均观测误差小于1.2%。图中,vactual为实际速度。基于q轴电压的观测速度vzq仿真结果如图11所示,由于q轴需要估计2个参数,因此观测误差较d轴大,误差小于1.9%。根据图10和图11观测速度仿真结果可知,由于d轴和q轴两种观测速度分别反映动子进入和离开定子段的不同阶段,在不同时刻两种速度观测方法误差不同,使用数据融合算法可提高速度观测精度。

图9 超声速直线感应电机d轴多元电压uzd和q轴多元电压uzq波形
Fig.9 d-axis multivariate voltage and q-axis multivariate voltage of supersonic LIMs
由图(10)和图(11)可知,当动子刚进入或离开定子段、供电切换时d轴或q轴速度观测误差较大。本文提出了加权融合算法,当d轴观测误差较小时提高其权重;反之,则提高q轴权重,以获得更准确的观测速度。由式(23)~式(25)计算d轴和q轴观测速度权重,如图12所示,d轴多元电压观测速度为动子离开定子段,q轴多元电压观测速度为动子进入定子段,两者误差相互补充,通过加权融合可明显抵消与实际速度的误差,消除在供电切换和动子刚进入定子段时速度观测误差。
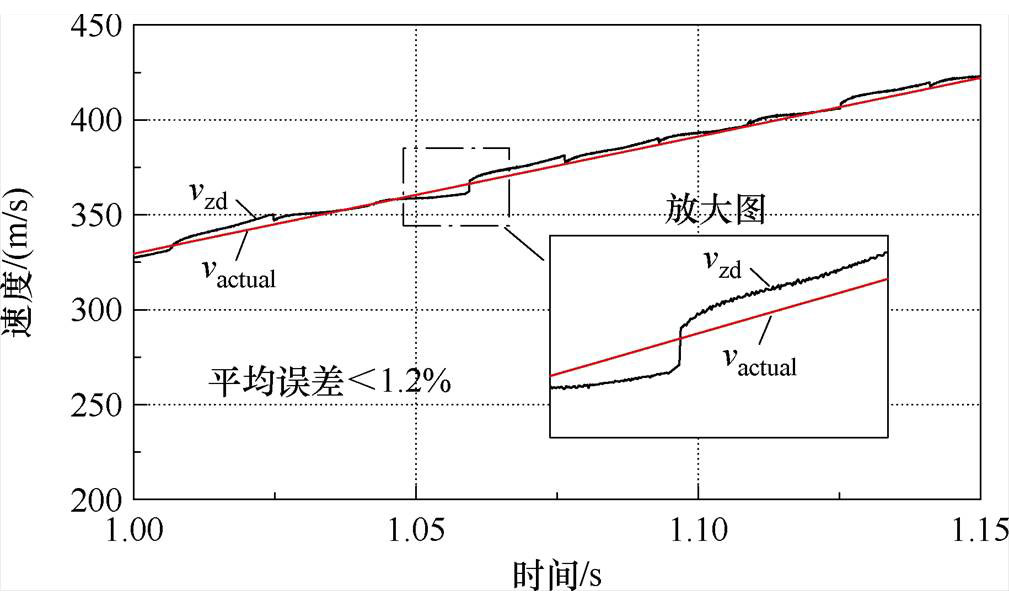
图10 基于多元电压特征提取d轴速度观测结果
Fig.10 Velocity observation of the d-axis multivariate voltage
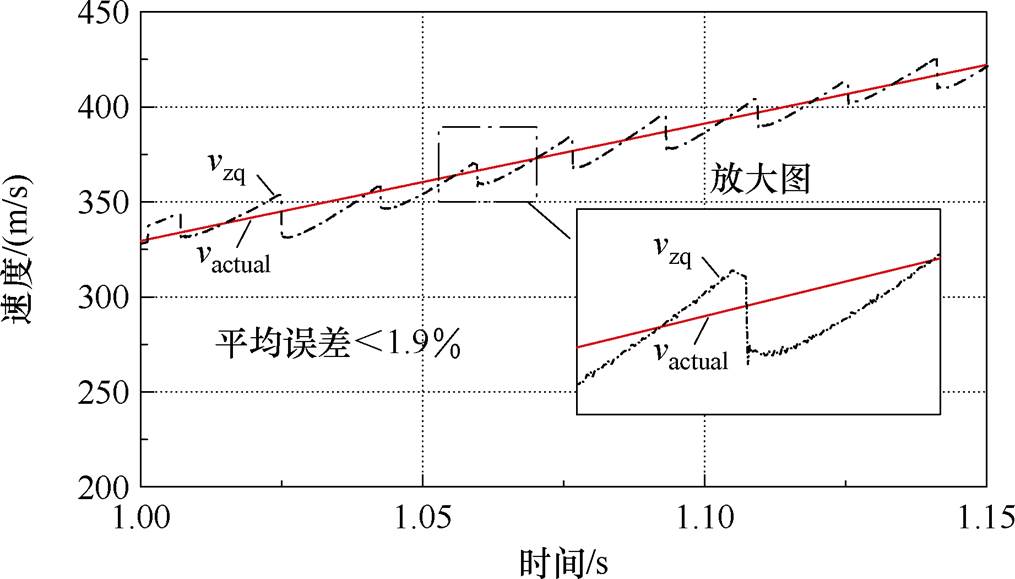
图11 基于多元电压特征提取q轴速度观测结果
Fig.11 Velocity observation of the q-axis multivariate voltage
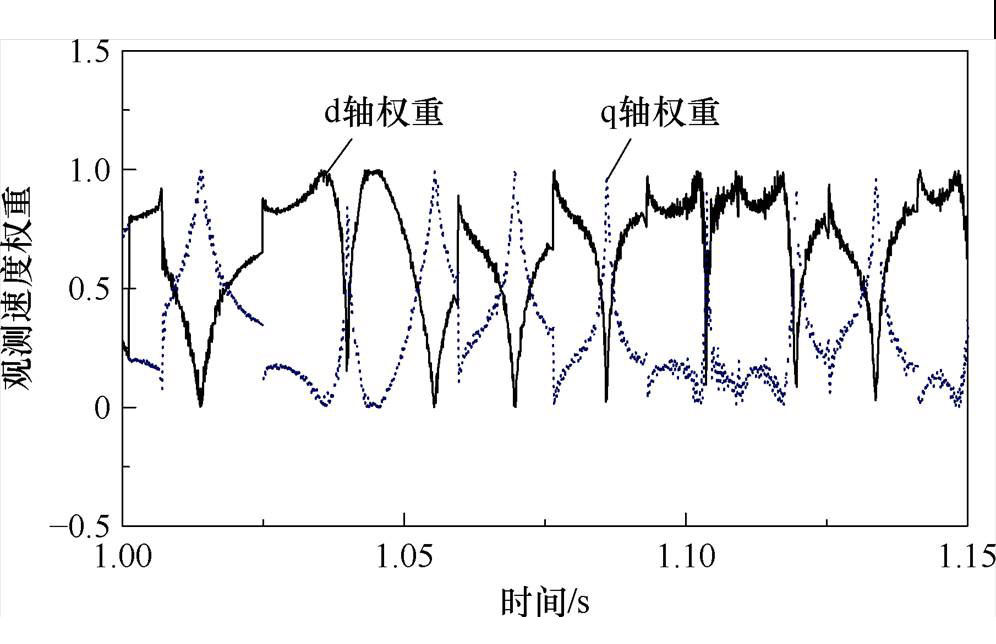
图12 d轴和q轴速度观测器的权重
Fig.12 The weight of the dq aix observed velocity
图13为dq轴观测速度加权融合算法仿真结果,图13a中,vzd和vzq分别为d轴和q轴多元电压速度观测结果,vob为d轴和q轴加权融合结果,可知dq两轴观测速度的正负误差可相互抵消,提高了速度观测精度。图13b为加权融合观测速度vob与实际速度vactual对比,两者之间平均误差小于0.8%,实现了超声速工况下动子速度的观测。
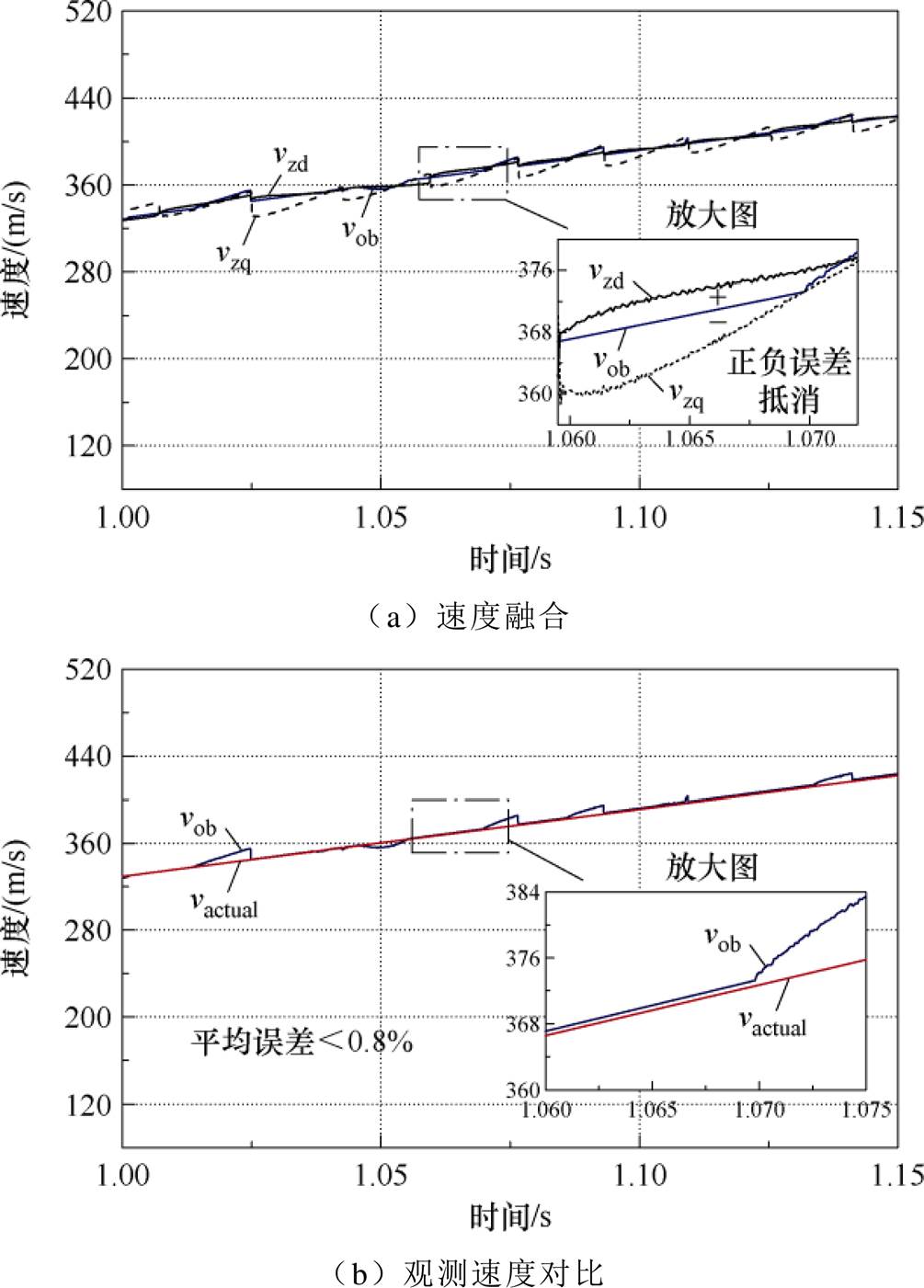
图13 dq轴观测速度加权融合算法仿真结果
Fig.13 Simulation results of the dq axis observation velocity-weighted fusion algorithm
基于多元电压特征提取的直线感应电机速度观测方法主要依据动子进入和离开定子段时定子电压变化特性观测电机速度,因此对电机参数准确性敏感性较低。由于直线感应电机因热积累或磁场饱和等因素会导致动子电阻和励磁电感在不同工况下有差异,本文分别对120%动子电阻和80%励磁电感进行仿真对比,结果如图14所示。由图14可知,动子电阻和励磁电感参数不准确仅影响电机运行速度,对本文提出的速度观测精度影响较小。
将传统模型参考自适应(MRAS)方法与本文方法进行了对比,同样采用120%动子电阻和80%励磁电感,模型参考自适应速度观测方法仿真结果如图15所示。传统MRAS方法对电机参数准确性依赖性大,因超声速直线感应电机参数变化和快速时变因子an,导致速度观测最大误差达5.66%。相较于传统MRAS方法,本文提出的方法具有良好的参数变化适应性,验证了所提方法对电机参数准确性依赖较低的优点。
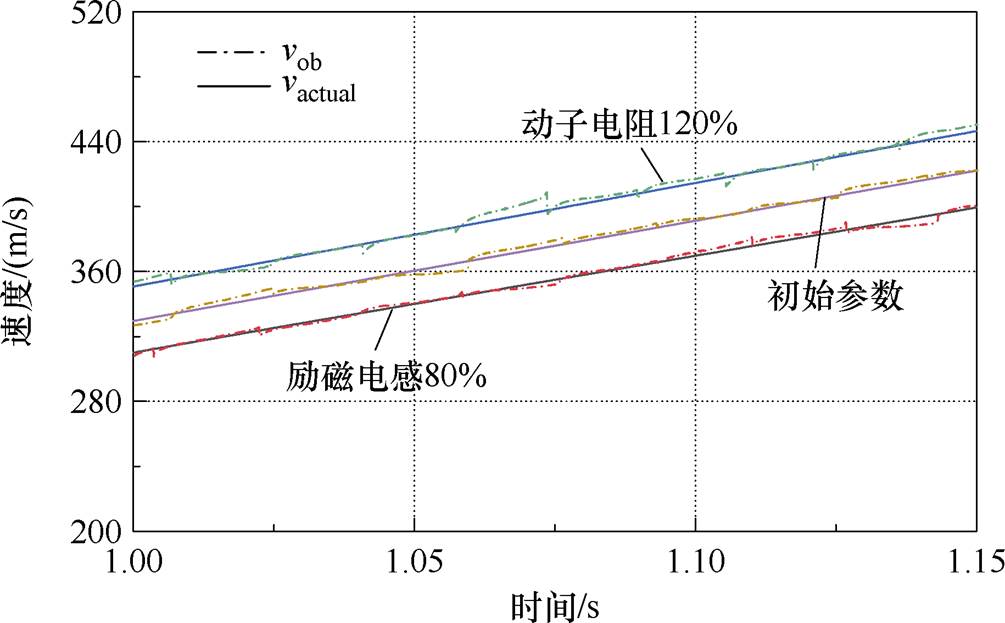
图14 速度观测方法对参数敏感性分析
Fig.14 Speed observation methods for different mover resistances and excitation inductances
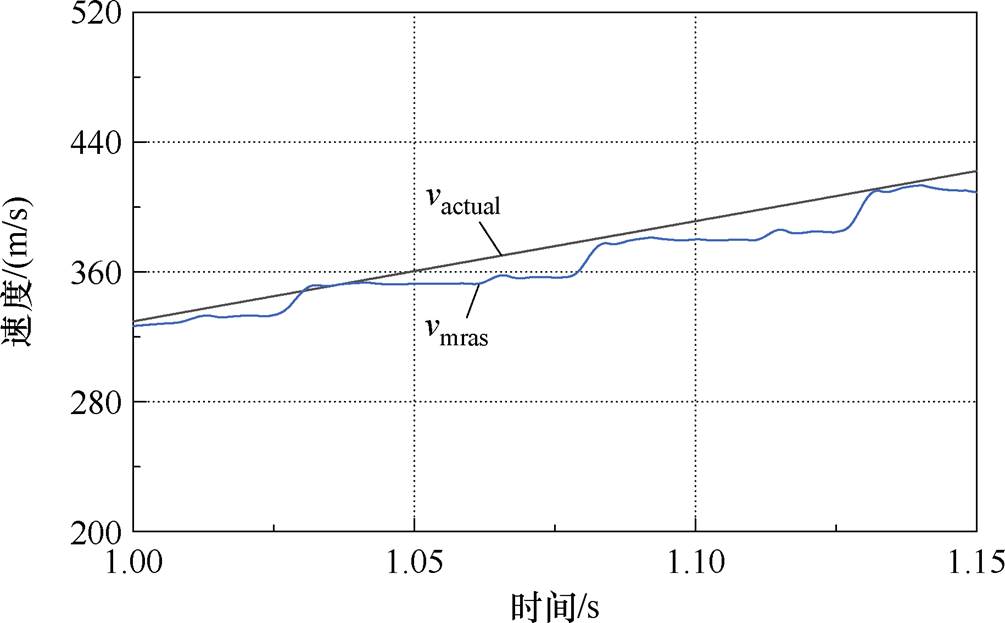
图15 模型参考自适应速度观测方法
Fig.15 Model reference adaptive speed observation method
基于多元电压特征提取的直线感应电机速度观测方法,通过构建分段函数融合相邻定子段电压,重构直线电机动子连续速度特征,实现速度观测。该方法适用于高速和高加/减速工况,对于低速或惰行工况具有一定局限性,主要分析如下。
(1)低速工况。一方面,在低速或零速工况时电机定子电压较低,电压测量精度影响电压特征提取性能;另一方面,为了减少供电开关数量,长定子直线电机通常在起动低速段采用长分段供电,当动子长度小于定子长度时该方法速度观测不连续。这是因为根据式(7)可知,本文速度观测方法需通过计算动子覆盖定子比例an来推算电机速度。若动子长度小于定子段长度,当动子全覆盖定子运动时,an为恒定1保持不变,因此速度在此处无法观测,速度观测具有不连续特性。低速工况下局限对超声速直线电机稳定运行影响较小,因为速度测量的磁编码或光电编码传感器在低速时受扰动影响较小,测量精度较高。
(2)惰行工况。直线电机在惰行工况时通常电流为零,此时电压也为零,因此无法提取多元电压变化特征观测速度。惰行工况下局限性对超声直线电机稳定运行也影响较小,因为惰行工况下直线电机推力为零,控制上可不依赖速度信息。如果惰行工况下保持励磁电流为恒定值,转矩电流为零,也能实现在该工况下速度的观测。
超声速直线感应电机全过程运行的速度、电压仿真波形如图16所示,包括直线电机加速、惰行和减速三个阶段,总共仿真时长为5 s。为了体现该方法的局限性,本文设置了不等长供电定子和惰行工况。首先,在低速起动段定子长度为动子长度的1.5倍,其余定子段长度为动子长度的0.67。仿真结果可知,其局限性体现在0~0.8 s,动子进入或离开1.5倍长定子时速度观测有效,动子在1.5倍定子内速度观测失效,具有非连续特点。其次,在2.7~2.9 s时,动子处于惰行阶段,此时电机电流下降为零,定子电压也快速下降为零,电压信息缺失导致速度观测失效。本文方法在0.8~2.7 s高速且高加速工况和2.9~5 s高速且高减速工况下具有较好的速度观测精度,可有效解决超声速激波不确定扰动对速度测量的影响。未来可进一步研究惰行和低速运行工况下的速度观测方法,提高方法的适用性。
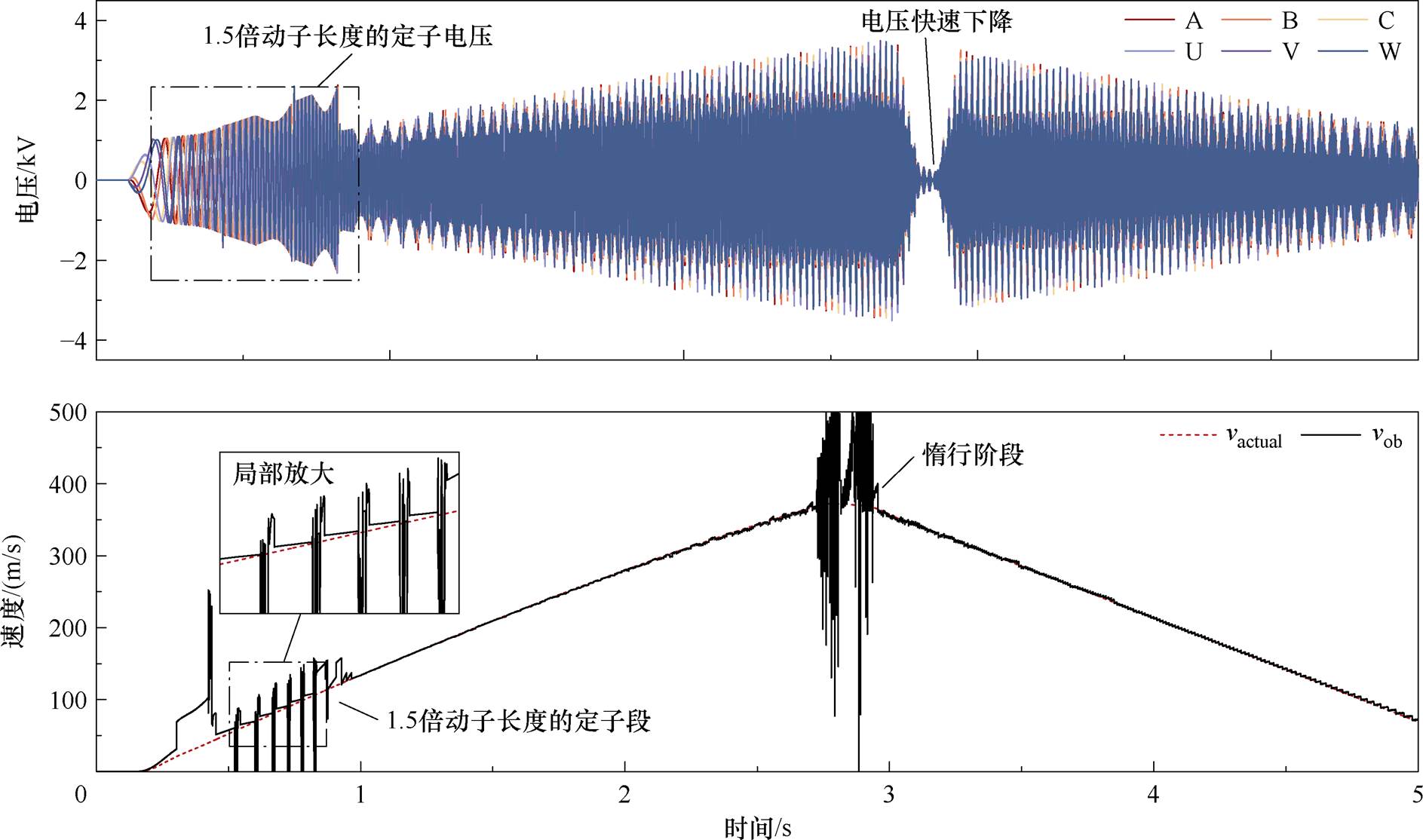
图16 超声速直线感应电机全过程运行的速度、电压仿真波形
Fig.16 Velocity and voltage simulation waveforms of the entire operation process of supersonic LIMs
本文借助超高速直线电机实验平台验证所提基于多元电压特征提取的超声速直线感应电机速度观测方法,实验平台如图17所示,主要由直线电机和分段供电设备组成。
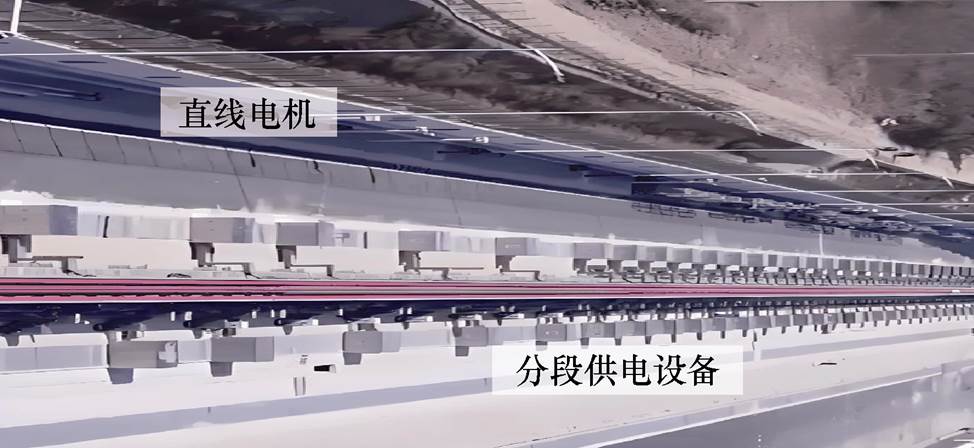
图17 超高速直线电机实验平台
Fig.17 Ultra-high-speed linear motor experimental platform
直线感应电机在超声速运行工况下动子进入和离开定子段时电压变化特性实验结果如图18所示。当动子进入定子段时,动子覆盖定子比例an增加,定子电感下降,定子段供电电压降低。当动子离开定子段时,动子覆盖定子比例an减小,定子电感上升,定子段供电电压升高。电压包络线特性与动子覆盖定子比例an变化相关,电压变化特性包含动子速度信息,实验结果与仿真和理论分析一致。
图19为直线感应电机超高速运行时d轴和q轴电压实验结果,包括动子进入定子段、动子全覆盖定子段、动子离开定子段和供电切换等阶段。随着动子覆盖定子段比例an增大,d轴电压增加;随着动子覆盖定子段比例an减小,d轴电压降低。q轴电压的变化与d轴电压相反。动子不覆盖定子段或者全覆盖定子段时,d轴电压和q轴电压均保持不变。
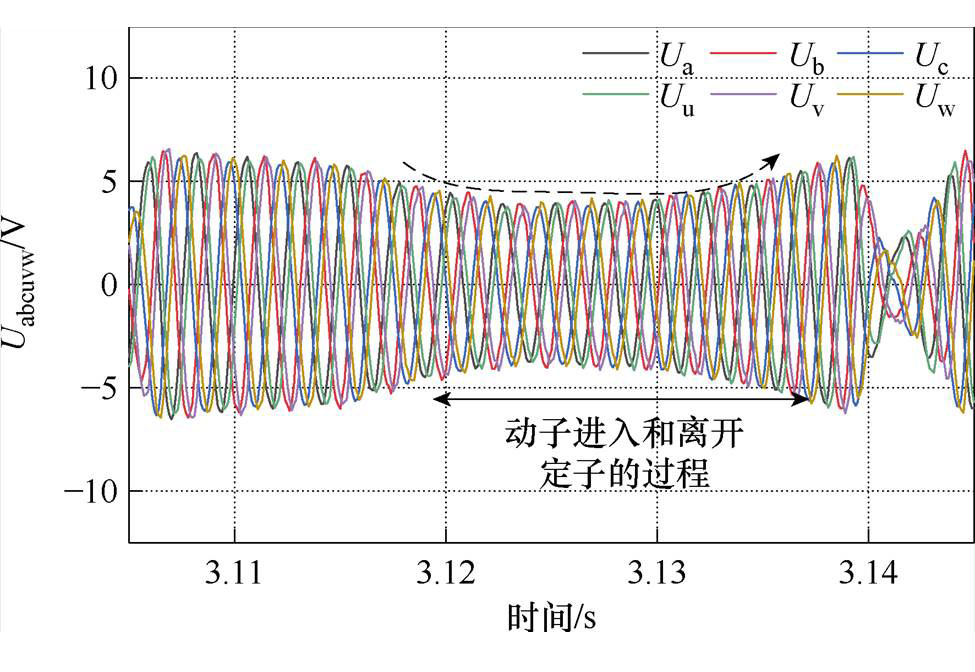
图18 直线感应电机动子进入和离开定子段时电压变化特性实验结果
Fig.18 Voltage variation characteristics when the mover of LIMs enters and leaves the stator
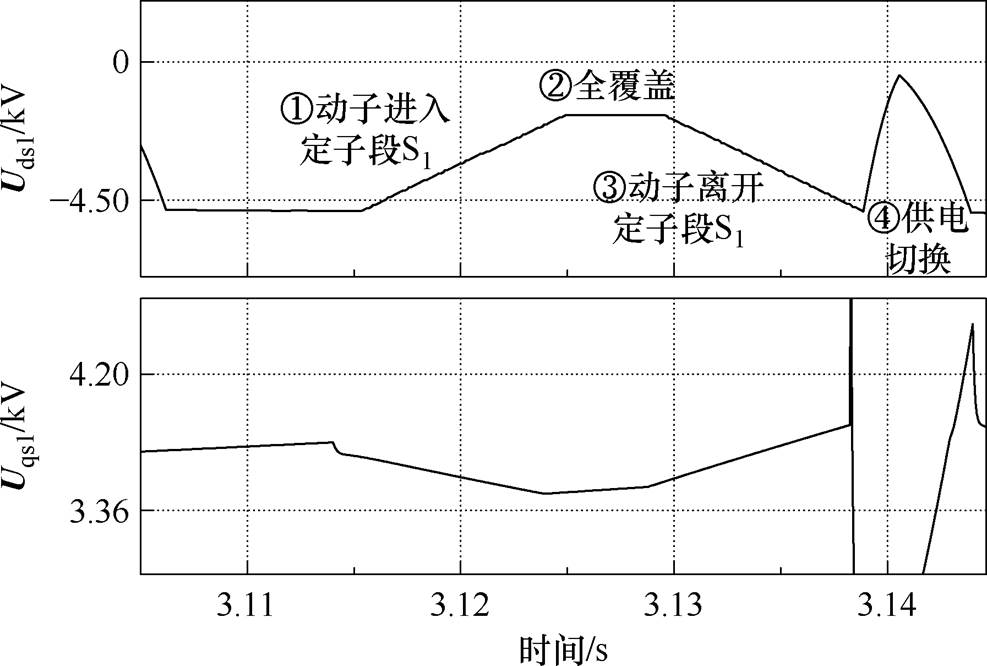
图19 直线感应电机d轴和q轴电压实验结果
Fig.19 Experimental results of dq axis voltage of LIMs
基于多元电压特征提取的直线电机速度观测实验结果如图20所示,将观测速度和测量速度进行对比分析。超声速激波的非定长不确定扰动通常为偶发短时扰动,为了验证速度观测方法的准确性和精度,本文选取测量速度值为未受严重影响的两个短时区域,并对测量数据进行了滤波处理,为速度观测准确性分析提供基准值。图20a为3.105~3.145 s区域内速度观测实验结果,直线电机动子经过1个完整定子段,动子速度为353~360 m/s。图20b为3.145~3.185 s区域内速度观测实验结果,动子进入下一个完整定子段,动子速度为360~365 m/s。由图20可知,本文所提速度观测方法在不同时刻不同定子段都具有较好的速度观测效果,速度平均观测误差小于1.1%,实现了超声速工况下动子速度的观测。
本文所提速度观测方法适用于高速且高加/减速工况,在惰行和低速时具有一定的局限性,图21为多元电压特征提取的速度观测方法在加速、惰行和减速三个阶段实验结果。在2.5~4.0 s区域内直线电机速度由250 m/s高加速至370 m/s超声速运行,经过惰行段后高减速至250 m/s。在3.25~3.5 s惰行阶段,电机电压为零,速度不可观测,体现出本文方法的局限性。然而,在高速且高加/减速阶段,本文方法均可较好地观测速度,实现超声速工况下动子速度的观测,可有效解决超声速激波不确定扰动对速度测量的影响。
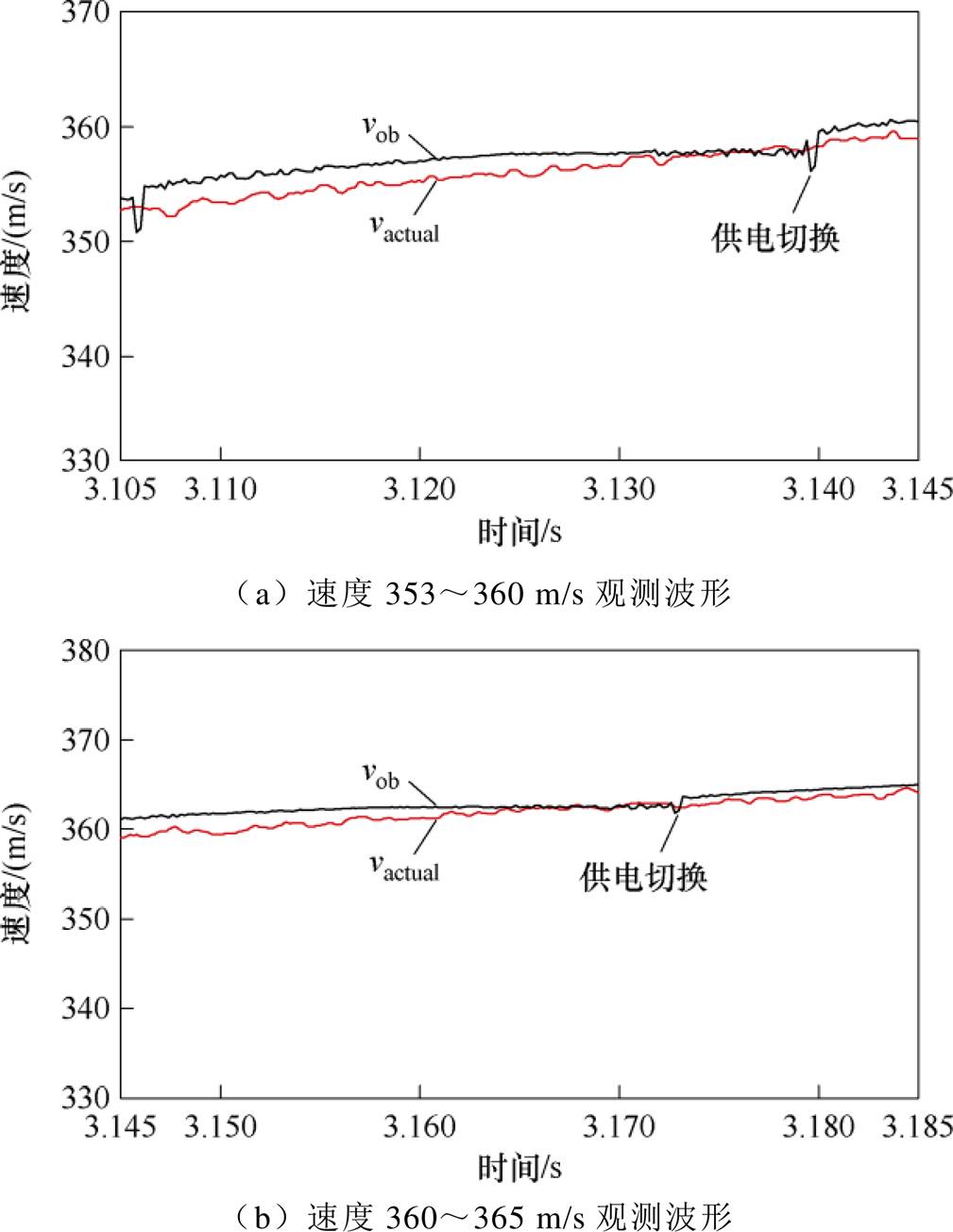
图20 多元电压特征提取的速度观测方法实验结果
Fig.20 Experimental results of the speed measurement based on multivariate voltage feature extraction
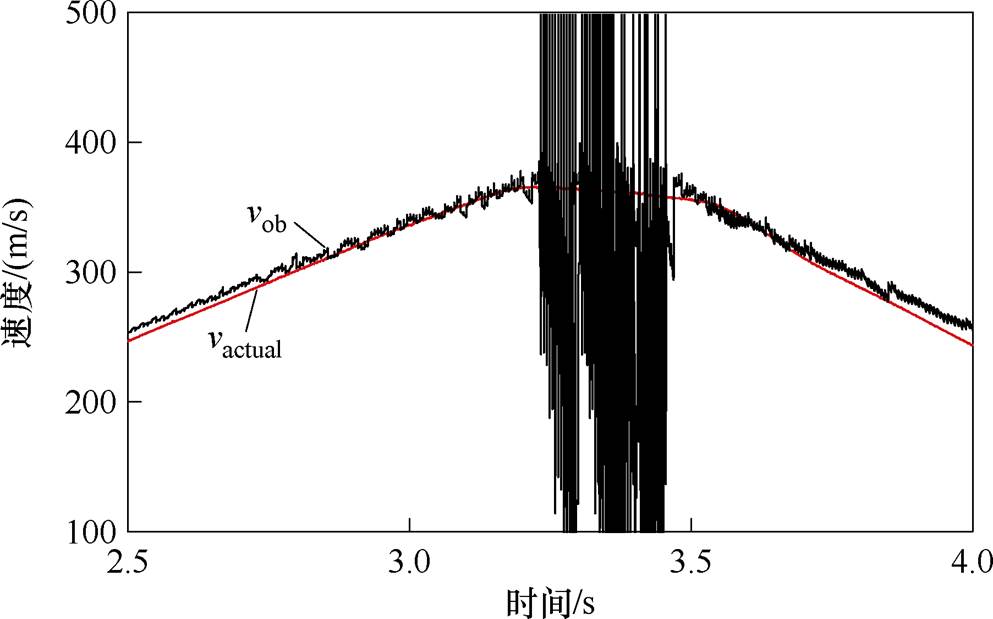
图21 高速且高加/减速工况下多元电压特征提取的速度观测方法实验结果
Fig.21 Experimental results of the speed measurement based on multivariate voltage feature extraction under high-speed and high acceleration/deceleration conditions
本文提出一种基于多元电压特征提取的超声速直线感应电机速度观测方法,通过理论建模、仿真分析与超高速实验验证,得出以下结论:
1)所提方法通过分段函数融合相邻定子段的dq轴电压,构建具有连续速度特征的多元融合电压,有效消除了单个定子段电压直流偏置及观测盲区。
2)利用定子段切换时刻的电压变化特性动态提取速度观测器参数,降低了对励磁电感、动子电阻等精准参数的依赖,显著增强了系统鲁棒性。
3)dq轴观测速度加权融合算法通过线性预测与误差反比重分配权重,实现动子进出定子段不同阶段的误差互补,提高了速度观测精度。仿真速度观测误差小于0.8%,实验速度观测误差小于1.1%。
4)所提方法适用于高速且高加/减速工况,在低速或惰行阶段具有一定的局限性,但是不影响超声速工况下动子速度的观测。
本文所提速度方法无需额外传感器或高频信号注入,有效解决了高速且高加/减速工况下超声速激波不确定扰动对直线电机推进系统速度测量的影响,为直线电机更高速度运行提供速度观测基础。未来可进一步研究惰行和低速运行工况下速度观测方法,提高基于多元电压特征提取的超声速直线感应电机速度观测方法的适用性。
参考文献
[1] 鲁军勇, 柳应全. 电磁发射用直线电机及其控制技术综述[J]. 电工技术学报, 2024, 39(19): 5899- 5913.
Lu Junyong, Liu Yingquan. Review on linear motor for electromagnetic launch and its control tech- nology[J]. Transactions of China Electrotechnical Society, 2024, 39(19): 5899-5913.
[2] 马伟明, 鲁军勇. 电磁发射技术的研究现状与挑战[J]. 电工技术学报, 2023, 38(15): 3943-3959.
Ma Weiming, Lu Junyong. Research progress and challenges of electromagnetic launch technology[J]. Transactions of China Electrotechnical Society, 2023, 38(15): 3943-3959.
[3] Cupertino F, Pellegrino G, Giangrande P, et al. Sensorless position control of permanent-magnet motors with pulsating current injection and com- pensation of motor end effects[J]. IEEE Transactions on Industry Applications, 2011, 47(3): 1371-1379.
[4] 刘伟, 刘浩民. 改进的脉振高频注入永磁同步电动机无传感器控制[J]. 电气技术, 2023, 24(6): 6-12, 20.
Liu Wei, Liu Haomin. Improved sensorless control for pulsating high frequency signal injection of permanent magnet synchronous motor[J]. Electrical Engineering, 2023, 24(6): 6-12, 20.
[5] 王天擎, 王勃, 于泳, 等. 基于二阶变增益滑模的感应电机电压模型磁链观测器[J]. 中国电机工程学报, 2024, 44(11): 4490-4501.
Wang Tianqing, Wang Bo, Yu Yong, et al. Voltage model rotor flux observer of induction motor based on second-order variable gain sliding mode[J]. Pro- ceedings of the CSEE, 2024, 44(11): 4490-4501.
[6] 石秦赓, 朱俊杰, 韩一, 等. 基于自适应滑模观测器的永磁同步电机负载转矩辨识[J]. 电工技术学报, 2025, 40(12): 3868-3882.
Shi Qingeng, Zhu Junjie, Han Yi, et al. Load torque identification of permanent magnet synchronous motor based on adaptive sliding mode observer[J]. Transactions of China Electrotechnical Society, 2025, 40(12): 3868-3882.
[7] 卞小亮, 原熙博, 陈硕, 等. SiC逆变器驱动感应电机的高频脉振注入无速度传感器控制[J]. 电工技术学报, 2025, 40(22): 7289-7300.
Bian Xiaoliang, Yuan Xibo, Chen Shuo, et al. Sensorless control of SiC inverter-driven induction motors using high-frequency pulsating injection method[J]. Transactions of China Electrotechnical Society, 2025, 40(22): 7289-7300.
[8] 陈玥轩, 葛兴来, 左运, 等. 一种感应电机无速度传感器系统的电流传感器容错控制策略[J]. 中国电机工程学报, 2022, 42(6): 2346-2356.
Chen Yuexuan, Ge Xinglai, Zuo Yun, et al. A current sensor fault-tolerant control strategy for speed- sensorless induction motor system[J]. Proceedings of the CSEE, 2022, 42(6): 2346-2356.
[9] 滕然, 赵希梅. 基于复合观测器的PMSM分数阶快速终端滑模速度跟踪控制[J]. 电工技术学报, 2025, 40(16): 5259-5270.
Teng Ran, Zhao Ximei. Fractional-order fast terminal sliding mode speed tracking control based on composite observer for PMSM[J]. Transactions of China Electrotechnical Society, 2025, 40(16): 5259- 5270.
[10] 兰志勇, 李延昊, 罗杰, 等. 一种自适应扩展卡尔曼滤波的永磁同步电机无位置传感器矢量控制[J]. 电机与控制学报, 2024, 28(3): 141-148.
Lan Zhiyong, Li Yanhao, Luo Jie, et al. Sensorless vector control of permanent magnet synchronous motor based on adaptive extended Kalman filter[J]. Electric Machines and Control, 2024, 28(3): 141- 148.
[11] 涂炜, 江卫华, 胡为兵, 等. 基于自适应算法的IPMSM无速度传感器研究[J]. 自动化与仪表, 2020, 35(3): 82-87.
Tu Wei, Jiang Weihua, Hu Weibing, et al. Research on IPMSM speed sensorless based on adaptive algorithm[J]. Automation & Instrumentation, 2020, 35(3): 82-87.
[12] 林旺煊, 陈怡浩, 石嘉恒, 等. 基于改进自抗扰的永磁轮电机控制研究[J/OL]. 电工技术学报, https:// doi.org/10.19595/j.cnki.1000-6753.tces.250796.
Lin Wangxuan, Chen Yihao, Shi Jiaheng, et al. Research on permanent magnet electrodynamic wheel motor based on improved active disturbance rejection control[J]. Transactions of China Electrotechnical Society, https://doi.org/10.19595/j.cnki.1000-6753.tces. 250796.
[13] 王建渊, 王海啸, 尹忠刚, 等. 基于一阶线性自抗扰控制器的同步磁阻电机无速度传感器控制[J]. 电工技术学报, 2024, 39(14): 4405-4421.
Wang Jianyuan, Wang Haixiao, Yin Zhonggang, et al. Sensorless control of synchronous reluctance motor based on first order linear active disturbance rejection controller[J]. Transactions of China Electrotechnical Society, 2024, 39(14): 4405-4421.
[14] Lin Shiyu, Cao Yanfei, Li Chen, et al. Two-degree- of-freedom active disturbance rejection current control for permanent magnet synchronous motors[J]. IEEE Transactions on Power Electronics, 2023, 38(3): 3640-3652.
[15] Wang Bo, Tian Minghe, Yu Yong, et al. Enhanced ADRC with quasi-resonant control for PMSM speed regulation considering aperiodic and periodic dis- turbances[J]. IEEE Transactions on Transportation Electrification, 2022, 8(3): 3568-3577.
[16] 徐飞, 姜新宇, 李子欣, 等. 高速直线感应电机自学习抗扰控制策略[J]. 电工技术学报, 2025, 40(6): 1771-1783.
Xu Fei, Jiang Xinyu, Li Zixin, et al. Self-learning anti-disturbance control strategy for high-speed linear induction motor[J]. Transactions of China Electro- technical Society, 2025, 40(6): 1771-1783.
[17] 姜云风, 蓝益鹏, 孙伟栋. 基于ESO的磁悬浮直线同步电机变增益自适应迭代学习控制[J]. 电机与控制应用, 2023, 50(4): 1-7, 15.
Jiang Yunfeng, Lan Yipeng, Sun Weidong. Variable gain adaptive iterative learning control of magnetic levitation linear synchronous motor based on ESO[J]. Electric Machines & Control Application, 2023, 50(4): 1-7, 15.
[18] 徐飞, 李子欣, 孔甘霖, 等. 变长分段直线感应电机数学建模[J]. 中国电机工程学报, 2024, 44(13): 5338-5348.
Xu Fei, Li Zixin, Kong Ganlin, et al. Mathematical model of variable-length segmented linear induction motor[J]. Proceedings of the CSEE, 2024, 44(13): 5338-5348.
Abstract Linear induction motors (LIMs) offer the advantages of a simple mover design, ease of modularization, and the elimination of transmission mechanisms, making them ideal for ground-based high-speed electromagnetic testing facilities and aerospace electromagnetic launch systems. However, when LIMs operate at supersonic speeds (around 340 m/s at altitudes below 100 m and temperatures below 30℃), unsteady aerodynamic forces caused by shock waves create severe disturbances to the mover. This disruption can interfere with speed and position sensing devices, leading to failures in motor speed control.
This paper presents a speed observation method for LIMs based on extracting multivariate voltage features. First, a piecewise function is used to fuse the dq-axis voltages from adjacent segmented stators, thereby removing the inherent DC bias in individual stator voltages and reconstructing continuous speed profiles of the LIM mover. Second, by analyzing voltage variations during segmented stator switching, the method dynamically extracts parameters for the speed observer, reducing reliance on precise motor parameters. Lastly, a weighted fusion algorithm for the dq-axis observed speeds is developed to improve accuracy by adaptively adjusting weighting coefficients. The proposed approach is practical under high-speed and high acceleration/deceleration conditions. However, it has limitations during coasting and low-speed operations that do not significantly affect speed observations at supersonic speeds.
The proposed method is validated through Matlab/Simulink simulation and high-speed experiment. Simulation results indicate that errors in high-speed and average-speed measurements are less than 8% under high-speed and high-acceleration/deceleration conditions. Experimental results reveal an average error of less than 1.1% compared to sensor measurements. Both simulation and experimental data confirm that accurate speed observation is achievable during supersonic operation.
The following conclusions are drawn from the simulation and experimental analysis. (1) Compared to traditional single-segment methods, the proposed approach that combines information from adjacent stator segments can achieve continuous speed characteristics. (2) The method uses voltage variation characteristics at switching points to lessen dependence on precise parameters. (3) The dq-axis speed observation weighted fusion algorithm improves the accuracy of speed observation. (4) The proposed method is suitable for high-speed and high-acceleration/deceleration scenarios, but it has limitations at low speeds or during coasting. Overall, the proposed method effectively reduces the impact of unpredictable shockwave disturbances on speed measurement, paving the way for disturbance suppression in LIMs operating at even higher speeds.
keywords:Linear induction motor, speed observation, supersonic speed, voltage feature extraction
DOI: 10.19595/j.cnki.1000-6753.tces.251248
中图分类号:TM346
中国科学院战略性先导科技专项(B类)资助项目(XDB1330202)。
收稿日期 2025-07-15
改稿日期 2025-10-16
徐 飞 男,1983年生,博士,副研究员,研究方向为高速直线电机数学建模与高性能控制。E-mail: xufei@mail.iee.ac.cn
范满义 男,1988年生,博士,副研究员,研究方向为高速直线电机高精度速度测量和无线电能传输。E-mail: fanmanyi@mail.iee.ac.cn(通信作者)
(编辑 崔文静)