 和A分别为挠性梁的弹性模量、截面二次矩、长度、材料密度和横截面积。
和A分别为挠性梁的弹性模量、截面二次矩、长度、材料密度和横截面积。摘要 挠性系统的无振动伺服定位对于提升高端工程装备的精度具有重要工程价值。传统输入整形器技术主要针对伺服过程中产生的残余振动,难以有效应对系统运行初期已存在的非零初始振动。为将这一时变状态量纳入整形器设计,亟须实现对系统振动特征参数的在线辨识。因此,该文研究针对永磁同步电机直驱挠性梁系统的非零初始振动抑制问题,设计了一种“特征辨识-参数整定-振动抑制-伺服定位”一体化的控制方案。该方案采用基于电机状态量的自传感技术实现了挠性梁的振动频率与相位的在线辨识,从而在不安装振动传感器的情况下实现了初始条件整形器参数自整定和在线主动抑振,避免了振动参数的离线获取和输入整形器的离线再设计。实验结果表明,相较于传统频谱分析方法,该文所提控制策略在保证振动特征在线辨识精度的同时,显著缩短了参数获取时间,并实现了辨识过程与振动抑制的快速衔接,大幅提升了辨识速度。在应对突发扰动激励的非零初始振动时,改进设计的初始条件整形器展现出优越的抑振性能,有效增强了系统对辨识误差的控制鲁棒性。
关键词:挠性系统 永磁同步电机 振动抑制 电机自传感技术 非零初始条件
实现低能耗、高响应速度和大操作空间是许多高端工程装备的共性目标[1-4]。为了满足这一需求,装备结构件普遍采用轻量化设计与大尺寸构型,典型代表包括柔性连杆机械臂[5-6]、空间站机械臂和太阳翼[7-8]、储能装置柔性涡簧[9]等。这类由永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)驱动的非理想刚体系统被统称为挠性伺服系统。此类系统在伺服定位过程中易发生显著的弹性形变,导致定位完成后产生多模态、低阻尼的残余振动。挠性系统普遍具有高阶、非线性和强耦合的特性[10],其残余振动不仅降低伺服系统的瞬态定位精度与操作效率,更可能引发机械疲劳甚至导致安全事故。因此,挠性系统振动抑制已成为现代高性能伺服驱动领域的关键研究方向[11]。
输入整形技术作为一种高效的前馈控制方法,通过设计特定脉冲序列与运动指令卷积重构,实现伺服系统的运行轨迹整形进而抑制振动。该抑振技术具有兼容性强、不影响系统稳定性的优势,在工程领域得到了广泛应用[12-13]。输入整形器进行卷积运算的副作用是给运动指令造成一定延时。零振动(Zero Vibration, ZV)整形器是常用的延时较短的输入整形器,通过两个脉冲即可完成指令重构[14]。输入整形器的参数主要由系统的振动频率和阻尼系数决定,因此,在设计输入整形器之前,必须对系统的振动特性进行测量。工程中通常采用快速傅里叶变换(Fast Fourier Transform, FFT)对系统振动频率进行离线或在线辨识[15-16]。然而,FFT的固有局限在于频谱分辨率与样本数量正相关,导致辨识过程耗时较长,且对控制器的存储和算力提出较高要求[17-18]。值得注意的是,采样时长不足导致的频率误差会显著降低ZV整形器的抑振能力,虽然可以通过增加脉冲数量的设计提高整形器的鲁棒性,如零振动零导数(Zero Vibration and Derivative, ZVD)整形器、极不敏感(Extra Insensitive, EI)整形器等,但这会进一步加剧指令延时的问题[19]。因此,为优化振动抑制效果,不论是增加FFT采样时长,还是提升输入整形器的鲁棒性,都不可避免地降低系统的整体操作效率。因此,在保证参数辨识精度的前提下缩短其计算耗时,是协同提升运行效率与抑振效果的核心技术环节。
在工业应用场域中,传统输入整形器普遍仅适用于零初始条件的理想工况,然而挠性伺服系统的实际运行过程往往伴随非零初始振动现象,其激励源既包含辨识阶段引入的主动激励,亦涵盖操作误差、外部冲击等非预期突发扰动触发的被动激励。需要特别指出的是,当系统存在未衰减的非零初始振动时,传统输入整形器控制策略必须经历漫长的等待周期使残余振动自然衰减至容许范围,方可启动后续伺服定位操作,这种强制性的等待延时严重制约了作业效率[20]。针对此问题,学者提出的初始条件(Initial Condition, IC)整形器虽能有效地处理非零初始振动,但其参数整定不仅需要系统模态参数,还需实时检测振动相位[21]。现有技术方案普遍采用外置式振动传感器或激光测振仪器[22-23],这不仅增加了硬件成本,且在复杂工况下更面临着安装的可行性与可靠性等问题[24]。因此,开发基于电机本征状态量的非零初始振动抑制方法是提升挠性伺服系统工程实用价值研究的前沿方向。
概括而言,现有挠性伺服系统普遍存在以下问题:①针对非零初始振动的动态特征辨识与协同抑振机制缺失;②传统的在线频率获取方法存在计算效率与精度之间的固有矛盾;③抑振控制对附加振动传感器具有强依赖性,不利于工程应用。
为此,本文针对挠性伺服系统非零初始振动抑制,提出了一种融合电机自传感技术与输入整形技术的复合控制方法。该方法仅依赖PMSM编码器位置信息和定子电流信号,即可实现振动特征在线辨识及协同抑振,有效地避免了频率的离线获取和输入整形器的离线再设计。本研究所提出的控制方法根据PMSM直驱挠性负载系统的动力学模型构建扭振转矩观测器,通过广义二阶积分器-锁频环(Second Order Generalized Integrator based Frequency Locked Loop, SOGI-FLL)对挠性梁最低阶次模态的振动频率及相位进行在线辨识,替代了大样本、高计算量的传统频域分析方法。在此基础上,设计了初始条件下的零振动(Zero Vibration under Initial Condition, ZV-IC)整形器和初始条件下的零振动零导数(Zero Vibration and Derivative under Initial Condition, ZVD-IC)整形器,实现“振动特征参数的实时提取、输入整形器参数的在线整定、非零初始振动主动抑制”的复合功能集成,从而构建了计及非零初始条件的无传感器振动抑制方案。实验表明,本文方法在确保参数辨识精度的前提下,显著缩短挠性伺服系统的振动特征辨识时间,同时有效抑制突发扰动激励的非零初始振动,为高性能挠性伺服装备的研发提供了新的思路。
PMSM直驱挠性系统模型如图1所示,挠性梁一端与PMSM转子轴连接固定,另一端为自由端。在图1中,xOy为旋转坐标系,XOY为静止坐标系。E、I、l、和A分别为挠性梁的弹性模量、截面二次矩、长度、材料密度和横截面积。
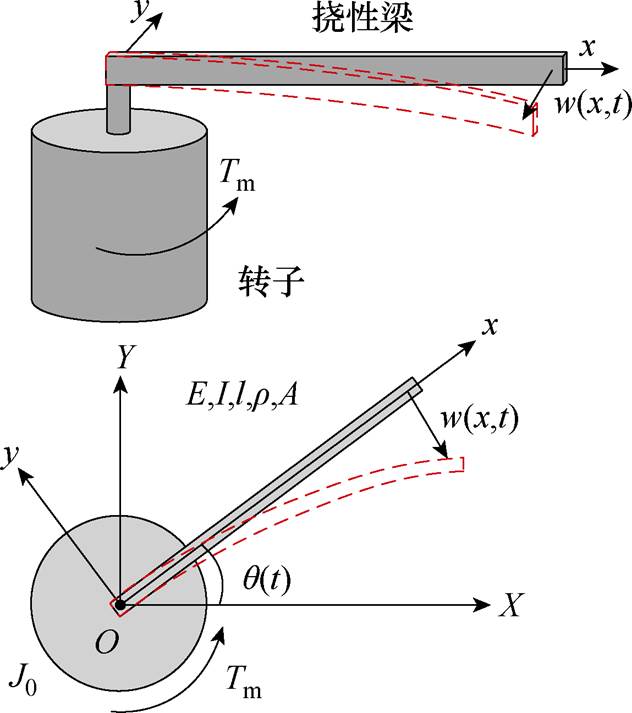
图1 永磁同步电动机驱动的挠性系统模型
Fig.1 Model of PMSM-driven flexible system
系统在水平面内运动,挠性梁上某一点因弹性形变偏离其原位置的距离被称为挠度w(x, t),x为该点与坐标原点之间的纵向距离(x轴方向上)。假设仅考虑其横向形变(y轴方向上),则挠度表达式为
 (1)
(1)
式中, 为第i阶模态的广义坐标;
为第i阶模态的广义坐标; 为第i阶模态的振型函数。
为第i阶模态的振型函数。
xOy与XOY坐标系之间的转换关系可表示为
 (2)
(2)
式中, 为PMSM的机械位置角。
为PMSM的机械位置角。
整个系统所具有的动能总和为
 (3)
(3)
式中,J0为PMSM转子的旋转惯量。
由于系统在水平面旋转,系统总势能全部来源于挠性梁形变产生的弹性势能,其表达式为
 (4)
(4)
根据能量守恒,列写系统的拉格朗日方程为
 (5)
(5)
式中,Tm为PMSM输出的电磁转矩。
联立式(2)~式(5)并忽略极小量,可得系统的动力学方程组为
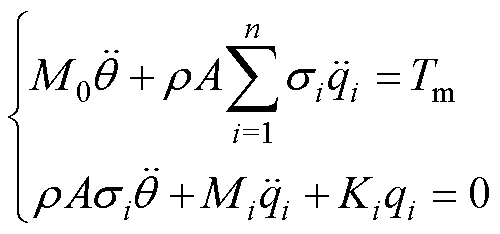 (6)
(6)
其中
 (7)
(7)
式中,M0为系统刚性的旋转惯量;Mi为第i阶模态的主质量;Ki为第i阶模态的主刚度; 为第i阶模态的刚柔耦合程度。
为第i阶模态的刚柔耦合程度。
式(6)第一行等式中的 为系统加减速所需要的转矩,可知等号左边另一项为引起系统振动的扭振转矩TB,其表达式为
为系统加减速所需要的转矩,可知等号左边另一项为引起系统振动的扭振转矩TB,其表达式为
 (8)
(8)
对式(6)进行拉普拉斯变换,可得系统动力学方程组在频域的表达式为
 (9)
(9)
在仅考虑第一阶模态的情况下,由式(9)可得梁末端挠度Dend与PMSM转速 的关系为
的关系为
 (10)
(10)
同时,可得扭振转矩TB与转速的传递函数为
 (11)
(11)
由式(10)和式(11)可知,梁末端挠度与系统中的扭振转矩是反相的,当扭振转矩的交流分量为零,梁的末端振动也将停止。
输入整形器实现残余振动抑制的原理如图2所示:将原指令与脉冲序列进行卷积,实现指令时域轨迹的重构,重构后指令所激励出的振动响应分量在时域上相互抵消,最终实现合成的残余振动响应为零。
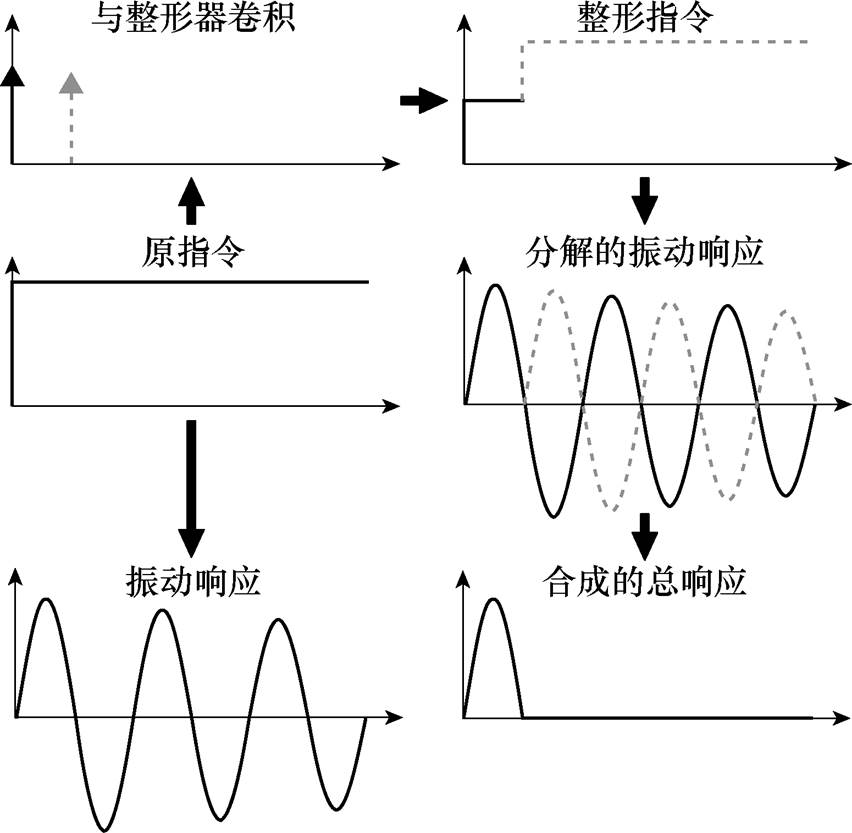
图2 输入整形器抑振原理示意图
Fig.2 Vibration suppression principle of input shapers
假设N个脉冲组成的序列作为输入时,二阶系统的残余振动比[14]为
 (12)
(12)
其中
 (13)
(13)
式中,VPRV为归一化后的振幅,用于表征输入整形器作用后的振动残留比例;Aj为第j个脉冲的幅值;tj为第j个脉冲的发生时间; 为振动频率;
为振动频率; 为阻尼系数。
为阻尼系数。
根据应用需求,列写约束方程组[2]为
 (14)
(14)
求解上述方程组可得ZV整形器的脉冲序列矩阵为
 (15)
(15)
其中
 (16)
(16)
假设初始振动等效为由一个幅值为A0的脉冲在-t0时刻输入二阶系统产生的响应,则残余振动比表达式修改为
 (17)
(17)
其中
 (18)
(18)
式中, 为初始振动相位;A0为初始振动幅值。
为初始振动相位;A0为初始振动幅值。
由式(18)可知,当=0时,初始振动可等效为发生在t=0时刻幅值为A0的脉冲;当 时,则等效为发生在t=0时刻幅值为-A0的脉冲。
时,则等效为发生在t=0时刻幅值为-A0的脉冲。
列写IC整形器的约束方程组为
 (19)
(19)
式(19)中约束条件的物理含义由上到下依次为:①残余振动为零;②对加速度指令进行整形,因此设置脉冲幅值总和为零,最终系统进入匀速运动状态,便于衔接后续伺服指令;③IC整形器的脉冲幅值不超过1,目的是防止给定指令超过伺服系统上限。其中第二行的约束方程可整理为
 (20)
(20)
式中, 、
、 分别为IC整形器的第1、j个脉冲。
分别为IC整形器的第1、j个脉冲。
在式(14)的第二行等式两边乘A0,可整理为
 (21)
(21)
式中, 、
、 分别为ZV整形器的第1、j个脉冲。
分别为ZV整形器的第1、j个脉冲。
对比式(20)和式(21)可知,当两式中第一项相等时,则两式等效。以=0的情况为例,IC整形器的设计思路为:第一束脉冲A1-IC与非零初始等效脉冲A0叠加,使合成后的脉冲序列等效于零初始条件下的传统输入整形器。由此可得ZV-IC整形器的脉冲序列矩阵为
 (22)
(22)
振动特征参数的测量或估计误差越大,输入整形器的残余振动抑制效果越差,ZV整形器与ZV-IC整形器对参数摄动十分敏感。在常规输入整形器的设计中,若想进一步提升输入整形器的鲁棒性,则可以增加约束方程为
 (23)
(23)
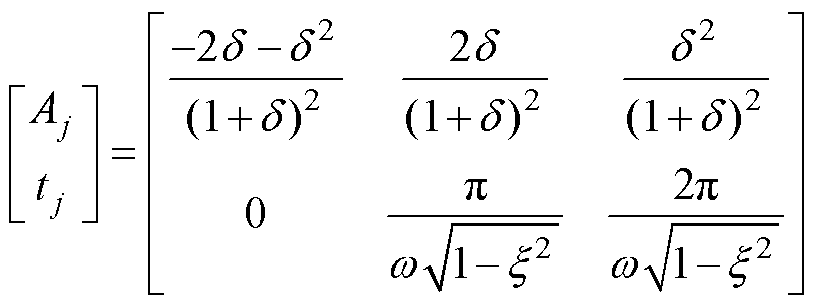
联立求解式(14)和式(23)可得ZVD整形器的脉冲序列矩阵为
 (24)
(24)
以估计频率 和实际频率的比值作为横坐标,以残余振动比VPRV为纵坐标,可绘制出ZV整形器与ZVD整形器的敏感度曲线,如图3所示。假设残振容许度为0.1,表示系统容许的最大残振比。整形器敏感度低于残振容许度的频率范围称作不敏感度,用于表征整形器对频率误差的鲁棒性。可见,通过增加条件约束,ZVD整形器相比ZV整形器不敏感度有明显提升,具备更强的鲁棒性。
和实际频率的比值作为横坐标,以残余振动比VPRV为纵坐标,可绘制出ZV整形器与ZVD整形器的敏感度曲线,如图3所示。假设残振容许度为0.1,表示系统容许的最大残振比。整形器敏感度低于残振容许度的频率范围称作不敏感度,用于表征整形器对频率误差的鲁棒性。可见,通过增加条件约束,ZVD整形器相比ZV整形器不敏感度有明显提升,具备更强的鲁棒性。
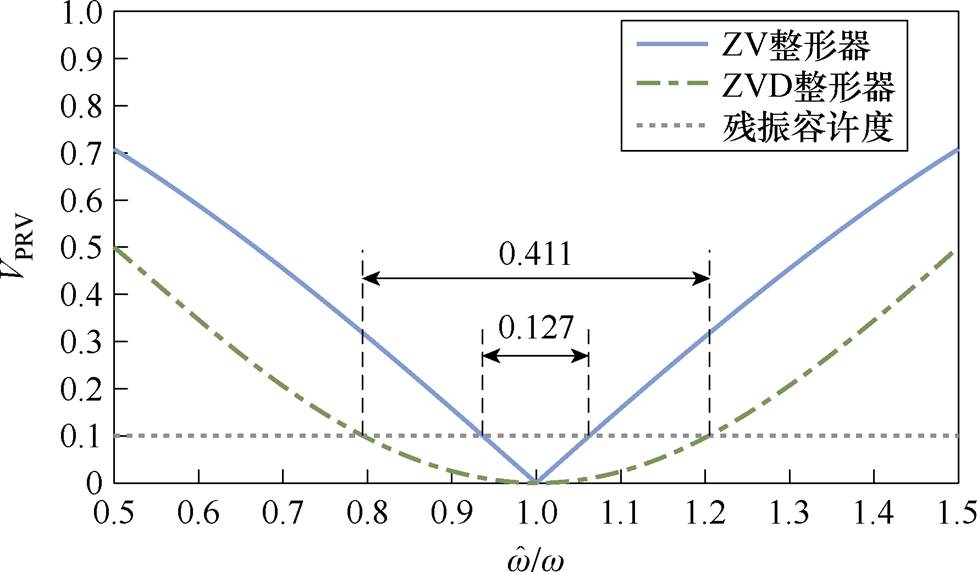
图3 ZV整形器与ZVD整形器的敏感度曲线
Fig.3 Sensitivity curves of ZV shaper and ZVD shaper
根据ZV-IC的设计思路,IC整形器的等效过程如图4所示。结合式(24)中ZVD整形器的表达式,推导ZVD-IC整形器的脉冲序列矩阵为
 (25)
(25)
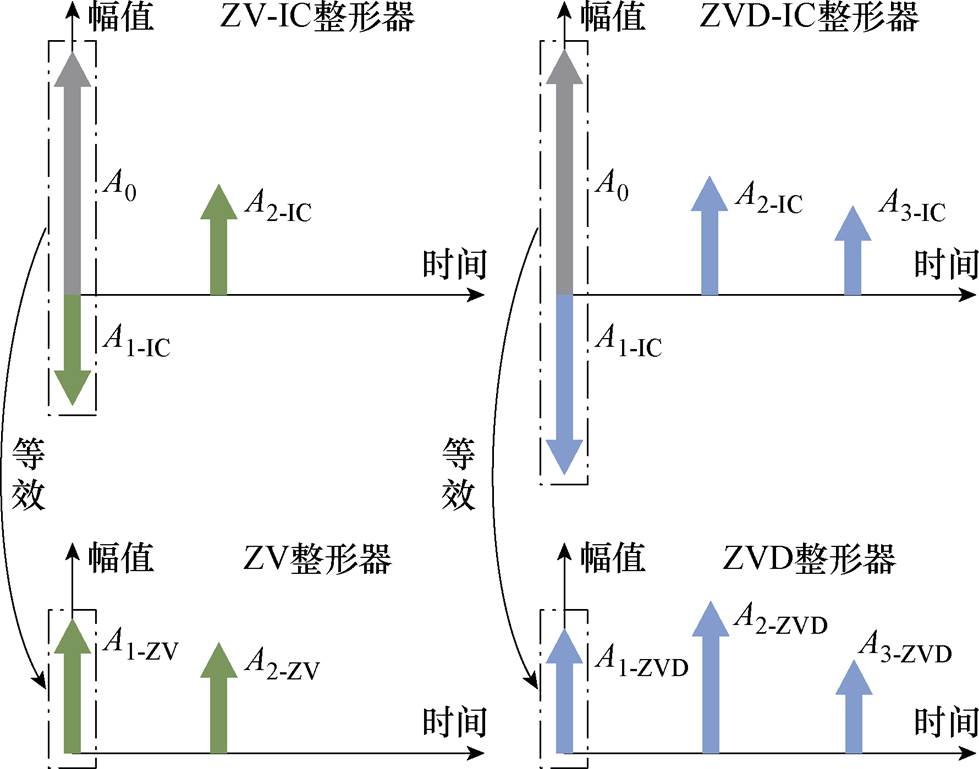
图4 IC整形器等效示意图
Fig.4 Equivalent schematic of IC shaper
根据式(17)可绘制IC整形器关于频率误差的敏感度曲线如图5所示。由频率敏感度曲线可知,当估计频率准确时,IC整形器能够完全消除非零初始振动。在相同的残振容许度下,ZVD-IC整形器相比ZV-IC对于频率误差具有更大的不敏感度,具备更强的鲁棒性。
此外,可假设阻尼系数的估计误差为 ,可绘制出IC整形器关于阻尼误差的敏感度曲线,如图6所示。相比ZV-IC整形器,ZVD-IC整形器不仅在频率误差上体现出更高的鲁棒性,对于阻尼系数误差的不敏感度也有明显提升。考虑到挠性系统的阻尼作用通常很微弱(
,可绘制出IC整形器关于阻尼误差的敏感度曲线,如图6所示。相比ZV-IC整形器,ZVD-IC整形器不仅在频率误差上体现出更高的鲁棒性,对于阻尼系数误差的不敏感度也有明显提升。考虑到挠性系统的阻尼作用通常很微弱( ),同时输入整形器相对于阻尼系数误差的不敏感度较高,因此在本研究的应用中可将阻尼系数设置为零来计算整形器参数。
),同时输入整形器相对于阻尼系数误差的不敏感度较高,因此在本研究的应用中可将阻尼系数设置为零来计算整形器参数。
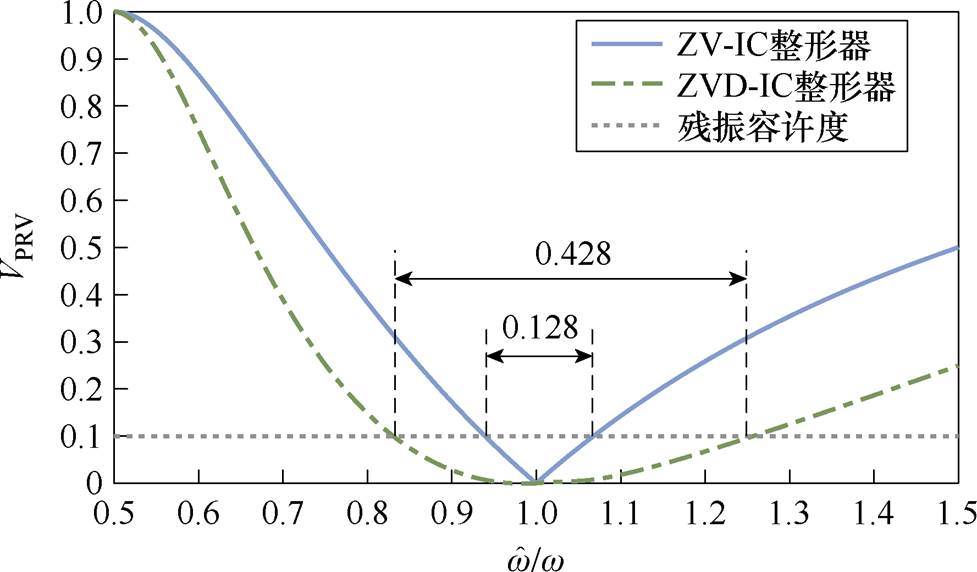
图5 IC整形器的频率误差敏感度曲线
Fig.5 Frequency error sensitivity curves of IC shapers
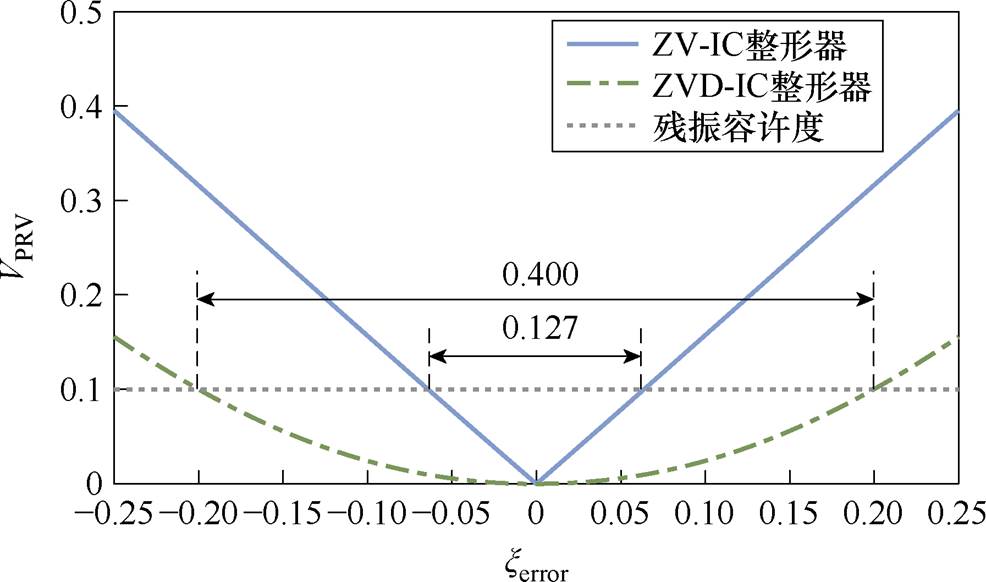
图6 IC整形器的阻尼误差敏感度曲线
Fig.6 Damping error sensitivity curves of IC shapers
针对低阻尼的挠性系统,IC整形器的参数是由振动频率来确定的,其触发时刻是由非零初始振动相位决定的。因此,在不使用额外振动传感器的情况下,需要通过PMSM本征状态量对振动频率和相位进行辨识,本研究利用SOGI-FLL实现对挠性系统振动特征的在线辨识。
根据挠性系统动力学方程可知,额定工况下的扭振转矩表达式为
 (26)
(26)
式中,Kt为转矩常数;iq为q轴电流。
根据式(26),构建不完全微分形式的扭振转矩观测器,其表达式为
 (27)
(27)
式中,g为决定观测器的截止频率的参数,合理的参数设置可以过滤扭振转矩中的高频分量。
考虑到实际工程中存在的非线性摩擦、挠性梁固定端装配偏心等因素可能在观测转矩中引入一定的直流分量,为避免其对SOGI-FLL性能产生不利影响,本研究采用高通滤波器(High-Pass Filter, HPF)对SOGI-FLL的输入信号进行前置滤波处理[20, 25]。滤波后的输入信号表达式为
 (28)
(28)
SOGI-FLL控制框图如图7所示,图中 为SOGI-FLL为同相跟踪输出,
为SOGI-FLL为同相跟踪输出, 为正交生成信号,h为高通滤波器参数,e为误差信号,vin为滤波处理后输入SOGI-FLL的信号。变量和
为正交生成信号,h为高通滤波器参数,e为误差信号,vin为滤波处理后输入SOGI-FLL的信号。变量和 与输入vin之间的传递函数为
与输入vin之间的传递函数为
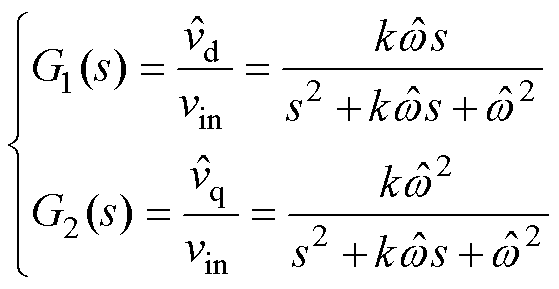 (29)
(29)
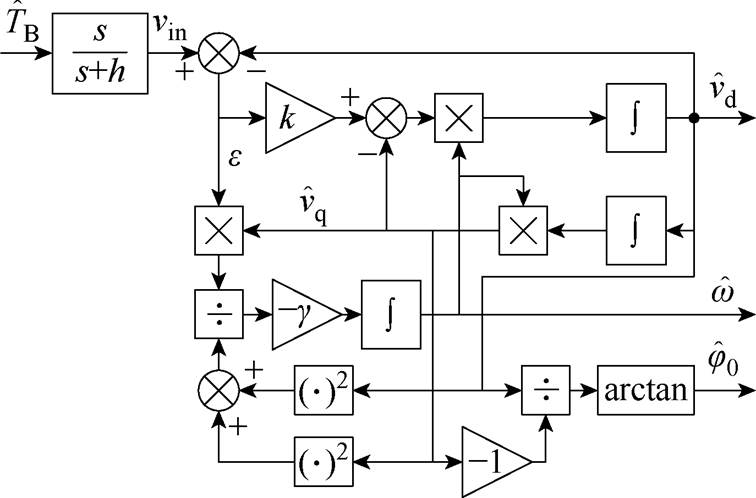
图7 SOGI-FLL控制框图
Fig.7 Control diagram of SOGI-FLL
由式(29)可知,G1(s)为以估计频率为中心频率的陷波器,参数k决定该陷波器的阻尼系数。始终滞后于90°,两者正交。首先,假设 ,则两个正交变量的时域表达形式为
,则两个正交变量的时域表达形式为
 (30)
(30)
进一步推导可得
 (31)
(31)
将式(37)的两边对时间t求导可得
 (32)
(32)
假设当下估计频率 偏离实际频率
偏离实际频率 ,根据控制框图可知,变量
,根据控制框图可知,变量 和
和 关于表达式为
关于表达式为
 (33)
(33)
将式(32)代入式(33)可得
 (34)
(34)
式(34)表示估计频率与实际频率之间的偏差,等式右边分子中k和的数值始终为正,因此可用积分控制器实现对频率的迭代搜索,学习率可设计为
 (35)
(35)
式中, 为正数,该参数数值的大小决定了频率迭代收敛的速度。
为正数,该参数数值的大小决定了频率迭代收敛的速度。
根据式(31),振动估计相位与估计频率将同步完成收敛。考虑到扭振转矩观测器中不完全微分将引入相位滞后,而前置高通滤波处理则造成相位超前,因此需要根据滤波器的相频特性,对估计相位进行相应修正。计及上述补偿的非零初始相位的计算公式为
 (36)
(36)
式中,h为HPF的截止角频率。
挠性伺服系统控制框图如图8所示,系统通过经典的三闭环控制结构实现PMSM的伺服控制,采用电机自传感模块辨识振动特征,IC整形器根据辨识结果自整定参数,进而生成用于抑振的运动指令。
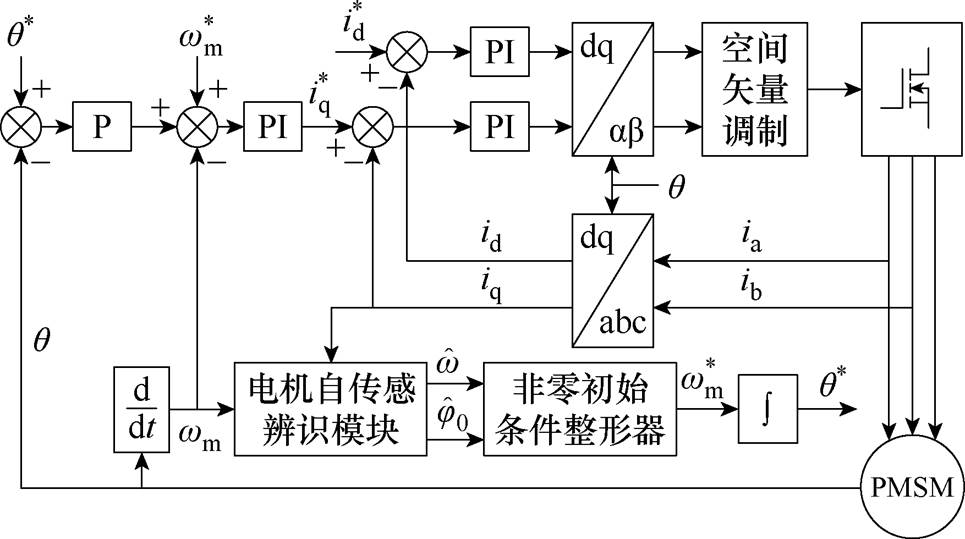
图8 挠性伺服系统控制框图
Fig.8 Control diagram of flexible servo system
非零初始振动抑制的控制流程如图9所示,该流程分为辨识与抑振两个阶段。流程中的所有判断语句设置最大判断次数,若超过最大判断次数则终止流程,人为进行错误处理及参数重置。
在辨识阶段,首先使用一个初始运动指令激励挠性系统振动。鉴于实验的易操作性,本研究采用加速度为 、加减速时间为
、加减速时间为 的等腰三角形轨迹,其时域表达形式为
的等腰三角形轨迹,其时域表达形式为
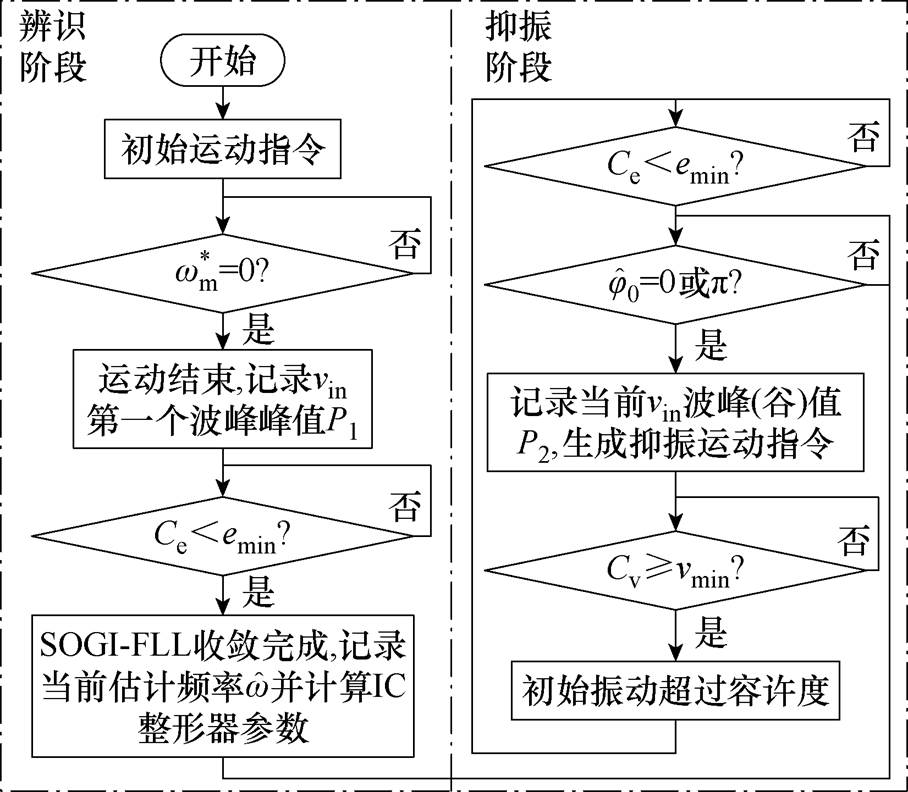
图9 非零初始振动抑制流程示意图
Fig.9 Non-zero initial vibration suppression flowchart
 (37)
(37)
式中,u为单位阶跃函数。
对应的扭振转矩的时域响应形式为
 (38)
(38)
式中, 为常数,其表达式为
为常数,其表达式为
 (39)
(39)
初始运动指令发生的同时电机自传感模块开始对振动特征进行辨识。运动指令结束后记录振动波形的波峰值P1,即可计算得到的值。为了判别辨识是否完成,使用指数平均移动构建代价函数,其递归表达式为
 (40)
(40)
式中, 为平滑因子。
为平滑因子。
设置阈值emin,当函数值小于emin时,则判定电机自传感模块辨识结束,保持SOGI-FLL中值不变并计算IC整形器参数。当实时相位为0或 时,记录振动波形的波峰(谷)值P2,系统发送斜率为
时,记录振动波形的波峰(谷)值P2,系统发送斜率为 的斜坡指令,经过IC整形器卷积处理后实施抑振,此后控制流程进入抑振阶段。
的斜坡指令,经过IC整形器卷积处理后实施抑振,此后控制流程进入抑振阶段。
在抑振阶段,用与式(40)相同形式的代价函数量化残余振动大小,其表达式为
 (41)
(41)
设置阈值vmin,当函数值大于vmin时,则判定振动超过了系统容许度,在相关条件满足的时刻再次生成抑振指令,实现对突发扰动激励的非零初始振动的实时抑制。
为验证本研究所提出的抑振控制方法的有效性,搭建实验平台如图10所示。由锰钢制作的挠性梁通过法兰盘与PMSM转子轴连接固定,采用铸铁固定台将PMSM垂直于水平面放置,使挠性梁可在水平面内旋转。采用基于STM32H743微处理器的自研驱动板对PMSM进行控制,采样定子相电流与转子位置信息,驱动板开关频率设置为20 kHz。上位机通过仿真器与驱动板实时通信,使用虚拟示波器对数据进行实时显示与记录,采样频率为1 kHz。实验平台的关键参数见表1。
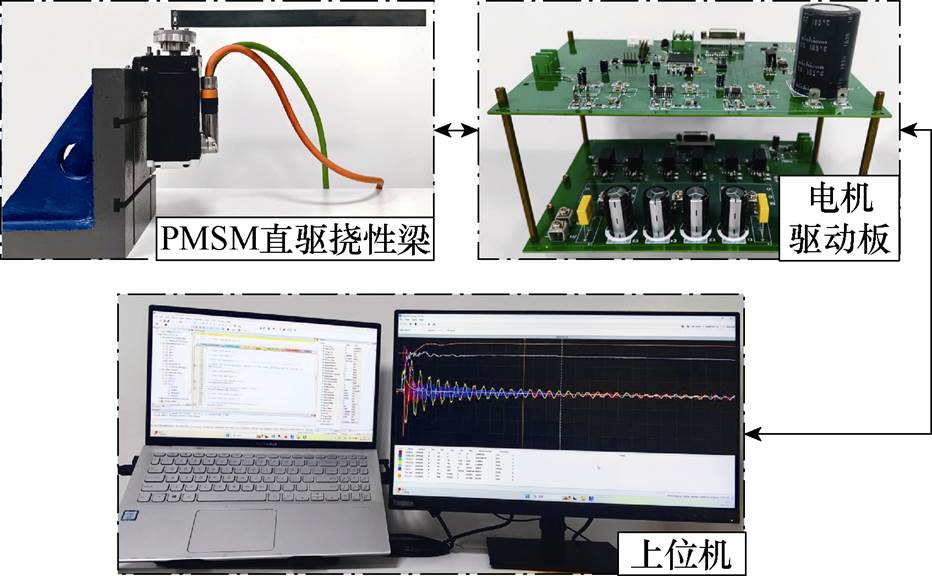
图10 实验平台
Fig.10 Experimental platform
表1 实验平台关键参数
Tab.1 Key parameters of experimental platform
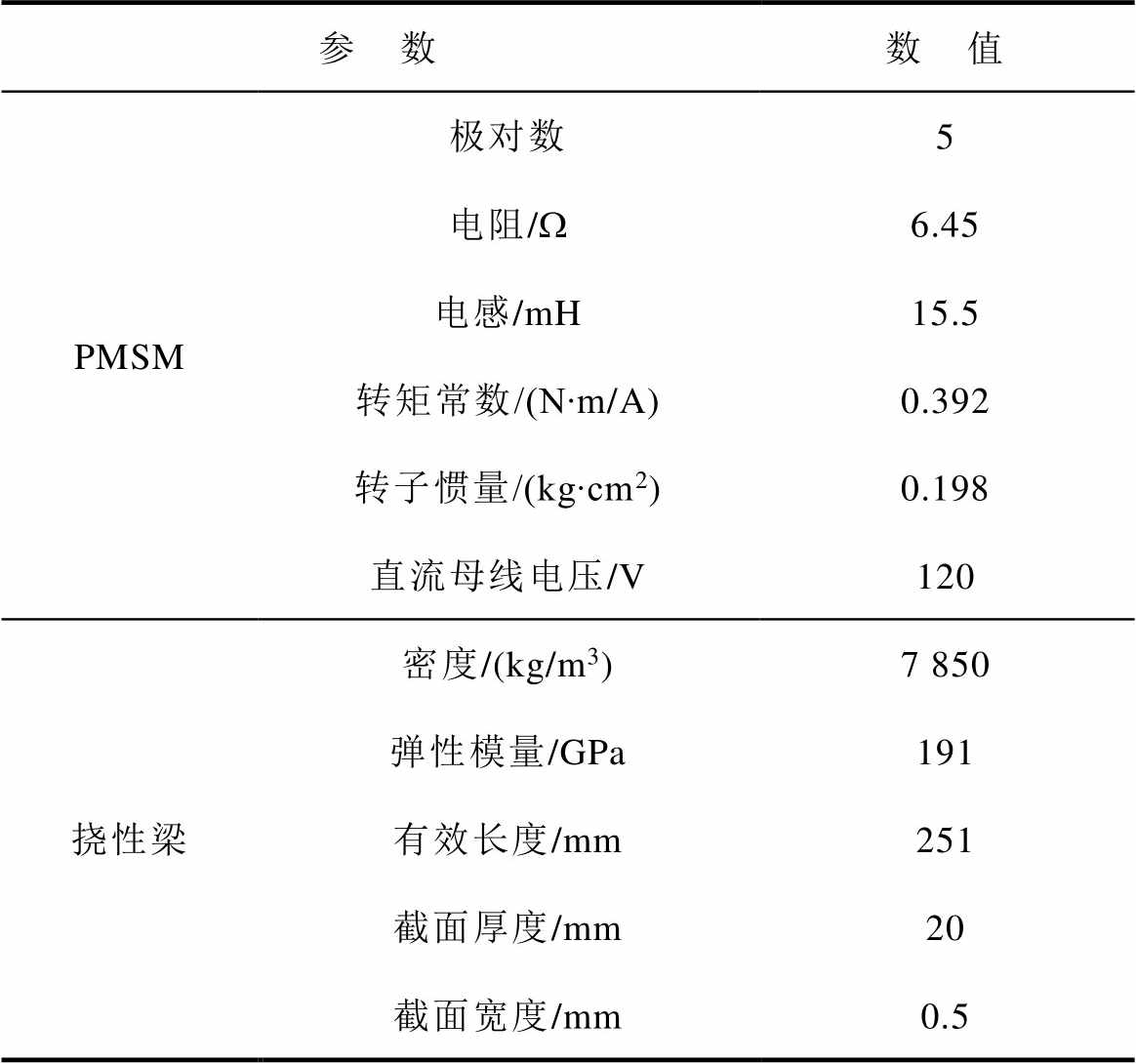
参 数数 值 PMSM极对数5 电阻/W6.45 电感/mH15.5 转矩常数/(N∙m/A)0.392 转子惯量/(kg∙cm2)0.198 直流母线电压/V120 挠性梁密度/(kg/m3)7 850 弹性模量/GPa191 有效长度/mm251 截面厚度/mm20 截面宽度/mm0.5
首先对电机自传感模块的振动特征辨识功能进行实验验证。在不施加抑振算法的前提下,仅使用初始运动指令主动激励挠性梁振动,初始运动指令参数设置为=1 500 r/min/s,=0.1 s;电机自传感模块的控制参数设置为g=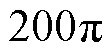 ,h=
,h= ,k= 0.707,=20,=0.9,emin=0.25。图11为初始振动触发电机自传感模块后,扭振转矩幅值、频率与相位等振动特征参数的辨识实验。为验证振动特征辨识准确性,本研究对观测扭振转矩即电机自传感的输入信号进行频域分析。对采样时长为40 s的数据样本进行FFT后处理,将FFT频谱峰值频率作为基准,处理结果为5.975 Hz。在FFT分析的基础上,以长度为50的窗口,通过希尔伯特变换获得瞬时相位,并将其作为相位基准。由式(29)可知,估计频率是SOGI的中心频率,因此随着估计频率向实际频率收敛逼近,SOGI所提取的模态幅值与估计相位检测越接近实际值。如图11所示,实验波形与理论分析一致,随着估计频率趋近稳态,估计幅值与相位也同步收敛。在2.12 s时,式(40)所示的代价函数低于阈值,系统判定电机自传感模块的辨识完成,频率估计结果为5.960 Hz,误差为0.25%。进入稳态后,估计相位与希尔伯特变换结果之差小于0.11 rad。该实验说明,相比传统的基于频谱的频率计算方法,本文提出的电机自传感方案能以更快的速度、更少的计算量实现同等精确的频率估计与相位计算。
,k= 0.707,=20,=0.9,emin=0.25。图11为初始振动触发电机自传感模块后,扭振转矩幅值、频率与相位等振动特征参数的辨识实验。为验证振动特征辨识准确性,本研究对观测扭振转矩即电机自传感的输入信号进行频域分析。对采样时长为40 s的数据样本进行FFT后处理,将FFT频谱峰值频率作为基准,处理结果为5.975 Hz。在FFT分析的基础上,以长度为50的窗口,通过希尔伯特变换获得瞬时相位,并将其作为相位基准。由式(29)可知,估计频率是SOGI的中心频率,因此随着估计频率向实际频率收敛逼近,SOGI所提取的模态幅值与估计相位检测越接近实际值。如图11所示,实验波形与理论分析一致,随着估计频率趋近稳态,估计幅值与相位也同步收敛。在2.12 s时,式(40)所示的代价函数低于阈值,系统判定电机自传感模块的辨识完成,频率估计结果为5.960 Hz,误差为0.25%。进入稳态后,估计相位与希尔伯特变换结果之差小于0.11 rad。该实验说明,相比传统的基于频谱的频率计算方法,本文提出的电机自传感方案能以更快的速度、更少的计算量实现同等精确的频率估计与相位计算。

图11 基于电机自传感的振动特征辨识
Fig.11 Vibration characterization based on motor self-sensing
在常规作业流程中,完成如图11b所示的频率辨识后,系统必须等待初始振动自然衰减至容许阈值以下,方可实施整形后的运动指令。这一被动等待过程严重制约了系统作业效率。为此,本文在系统辨识阶段引入了非零初始振动的主动抑制机制,从而消除了等待时间,实现特征辨识与主动抑振的快速衔接。
图12与图13为不同抑振方案的对照实验波形,验证了IC整形器在系统辨识流程中应用的时效优势。实验组与对照组采用统一初始运动指令(=1 500 r/min/s,=0.1 s)主动激励挠性梁振动。此设计旨在确保在标准化条件下形成可量化比较的初始振动,从而保证对照实验的公平性。

图12 振动辨识-主动抑振衔接实验
Fig.12 Vibration identification-active vibration suppression integration experiment
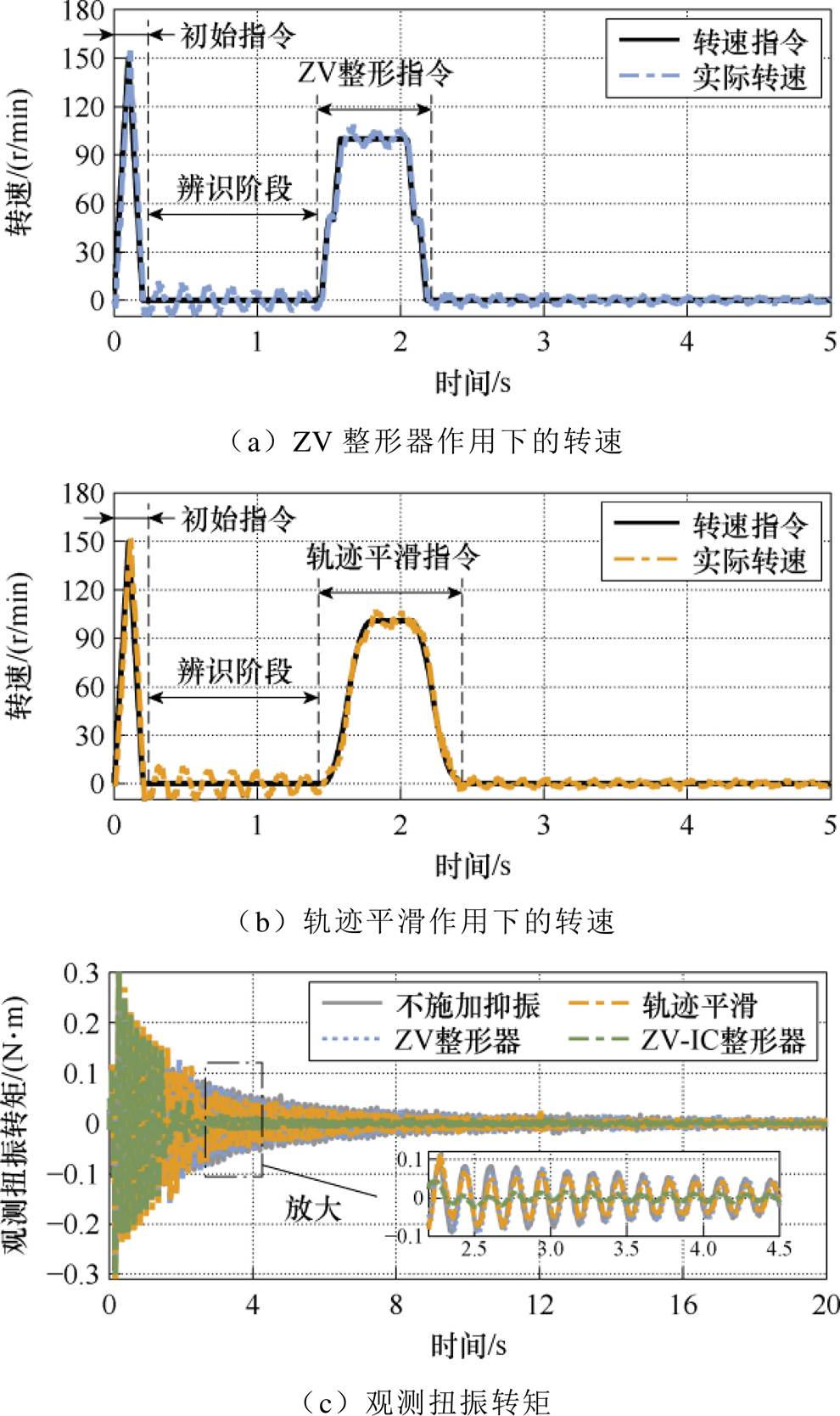
图13 辨识阶段的抑振方案对比实验
Fig.13 Comparative experiments of vibration suppression schemes at the identification stage
如图12所示,自传感模块完成频率及相位辨识后,立即应用ZV-IC整形器生成指令控制PMSM执行单圈正向运动。0.2 s时初始运动指令结束,在辨识阶段中,由于扭振转矩的影响,转速出现了持续的低频振荡。辨识过程在1.399 s结束,判定估计频率与估计相位收敛,此时固定估计频率作为SOGI的中心频率,保持相位实时估算。1.404 s时,估算相位数值首次到0 rad,用于抑制非零初始振动的整形指令发生。2.215 s时,抑振指令结束,电机转速中的振荡得到了明显抑制,且系统完成正向1圈的伺服定位。本实验中,先使用ZV-IC整形器抑制非零初始振动(加速阶段),再采用ZV整形的梯形速度轨迹控制电机恢复零速(减速阶段)。值得注意的是,在不执行额外后续指令的情况下,IC整形器作用后电机将运转在匀速工况,因此可灵活配合不同类型的运动指令与输入整形器来实现任意期望位置的伺服定位。
如图13所示,本研究选取常规ZV整形器与文献[26]提出的轨迹平滑方法作为对照组进行对比实验。在完成振动特征参数辨识后,分别实施两种对照方法,驱动PMSM执行单圈正向伺服定位运动(最大转速设定为100 r/min):图13a展示了常规ZV整形器衔接的转速波形,其加速度与实验组加速段指令保持一致;图13b展示了基于文献[26]方法(采用零极点对消法确定平滑参数)生成的S形转速轨迹方案以实现加速度的连续变化。由实验波形可见,电机转速的零速段和匀速段均存在明显的转速振荡现象,其根本原因在于初始扭振转矩未被有效抑制。可见,常规ZV整形器与轨迹平滑方法均仅依赖辨识获得的频率参数进行设计,并未将初始振动相位这一动态状态参数纳入设计考量,因而其抑振机制无法有效抵消既有振动,导致残余振动持续存在。
图13c对比展示了在四种不同衔接策略下的观测扭振转矩波形,分别为:不施加抑振、ZV整形器、轨迹平滑和ZV-IC整形器。由图中波形可见,ZV整形器与轨迹平滑方案作用终止后,残余振动与不施加抑振策略情形几乎无异,表明常规ZV整形器与轨迹平滑方法无法有效改变非零初始振动的状态。而在采用本文提出的ZV-IC整形器后,残余振动幅值得到明显削弱。为了进一步量化比较,规定当观测扭振转矩的峰峰值小于0.02 N·m时,判定残余振动镇定。由实验数据可知,在不施加抑振算法的振动辨识过程中,残余振动在12.632 s时镇定,采用ZV-IC整形器的辨识过程将耗时缩短至2.425 s。可见,本文所提出的非零初始振动抑制方法能将整体辨识过程时间缩短了80.8%,有效提高了挠性伺服系统的整体工作效率。上述对比实验验证了所提方案具备抑制非零初始振动的能力,该能力源于其在设计中增加了对振动相位的分析与处理。
在挠性伺服系统的工程应用中,除了辨识阶段主动激励的振动外,非零初始振动还包括因操作失误、外部碰撞等意外事件引发的振动。如图9所示,针对此类工况,可将辨识阶段得到的估计频率固定,保持振动幅值与相位实时估算,其余控制流程与辨识阶段的非零初始振动抑制一致。
图14和图15通过对比实验验证了不同的IC整形器对突发扰动激励下系统振动的抑制效果以及对参数失配的鲁棒性差异。基于图11所示的前序实验得到的估计频率( =5.960 Hz),配置阻尼系数为零,分别构造ZV-IC与ZVD-IC整形器进行实验。实验采用统一的初始运动指令(参数设置:= 1 000 r/min/s,=0.1 s)主动激励系统振动,确保各次实验的非零初始振动一致。图14展示了ZV-IC与ZVD-IC两种输入整形器作用下的PMSM转子位置与转速波形。未整形的初始运动指令在0.2 s时终止,随后系统振动被充分激励,电机自传感模块的振动幅值与相位估计值开始收敛。转速波形显示,ZV-IC与ZVD-IC整形器的抑振指令分别在1.113 s和1.115 s触发(判定相位已完全收敛),并持续至1.994 s和1.622 s结束。图15对比了两种整形器作用下的扭振转矩观测波形。尽管抑振指令结束后残余振动均得到显著抑制,但ZVD-IC整形器对应的残振转矩最大峰峰值(0.018 8 N·m)较ZV-IC(0.034 2 N·m)降低45.03%。为进一步量化评估两种IC整形器的抑振效果,本研究对抑振结束后PMSM的q轴电流进行FFT分析,其结果如图15c所示:采用ZVD-IC整形器后的残余振动在主频率处的峰值(0.002 3 N·m),相比ZV-IC整形器(0.007 5 N·m)降低69.33%,表明ZVD-IC整形器对参数误差表现出更强的鲁棒性。
=5.960 Hz),配置阻尼系数为零,分别构造ZV-IC与ZVD-IC整形器进行实验。实验采用统一的初始运动指令(参数设置:= 1 000 r/min/s,=0.1 s)主动激励系统振动,确保各次实验的非零初始振动一致。图14展示了ZV-IC与ZVD-IC两种输入整形器作用下的PMSM转子位置与转速波形。未整形的初始运动指令在0.2 s时终止,随后系统振动被充分激励,电机自传感模块的振动幅值与相位估计值开始收敛。转速波形显示,ZV-IC与ZVD-IC整形器的抑振指令分别在1.113 s和1.115 s触发(判定相位已完全收敛),并持续至1.994 s和1.622 s结束。图15对比了两种整形器作用下的扭振转矩观测波形。尽管抑振指令结束后残余振动均得到显著抑制,但ZVD-IC整形器对应的残振转矩最大峰峰值(0.018 8 N·m)较ZV-IC(0.034 2 N·m)降低45.03%。为进一步量化评估两种IC整形器的抑振效果,本研究对抑振结束后PMSM的q轴电流进行FFT分析,其结果如图15c所示:采用ZVD-IC整形器后的残余振动在主频率处的峰值(0.002 3 N·m),相比ZV-IC整形器(0.007 5 N·m)降低69.33%,表明ZVD-IC整形器对参数误差表现出更强的鲁棒性。
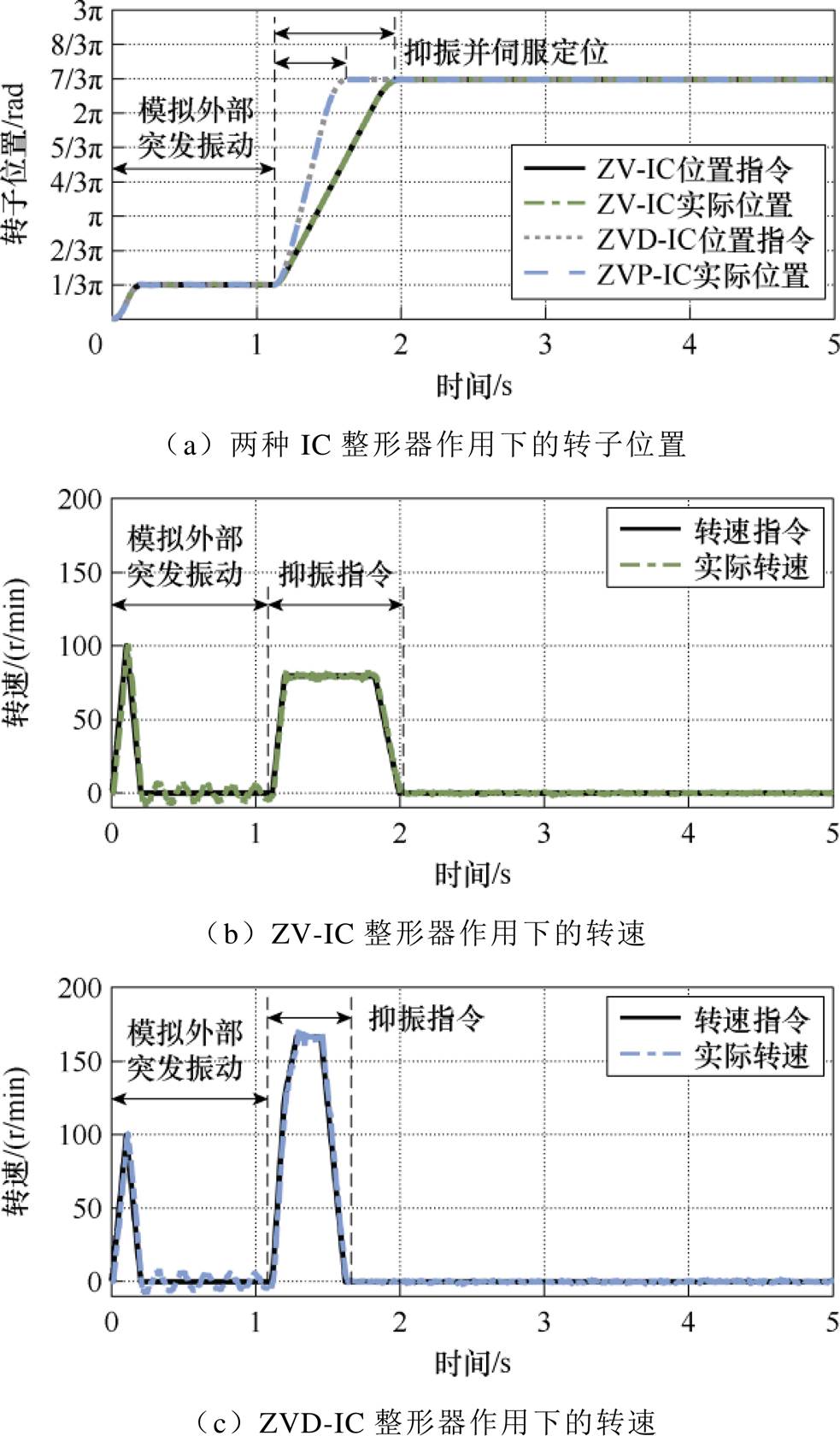
图14 ZV-IC整形器与ZVD-IC整形器的运动轨迹
Fig.14 Motion trajectories of ZV-IC shaper and ZVD-IC shaper
图15 ZV-IC整形器与ZVD-IC整形器的抑振效果比较
Fig.15 Comparison of ZV-IC shaper and ZVD-IC shaper
本文对非零初始条件下的PMSM直驱挠性系统振动抑制问题展开研究分析。首先,建立了计及挠性负载动态特性的系统动力学模型,并在此模型框架下推导出具有解析表达式的ZV-IC整形器,突破了传统输入整形器初始振动必须为零的限制条件。然后,为提高初始条件整形器的参数鲁棒性,本文在ZV-IC整形器基础上设计了ZVD-IC整形器,以降低频率估计误差和阻尼误差对振动抑制效果的影响。此外,提出了基于电机本征状态量的振动特征辨识方法,采用SOGI-FLL实现振动频率与实时相位的快速估计,并基于辨识结果实现整形器参数自整定。最后,形成了“特征辨识-参数整定-振动抑制-伺服定位”一体化的控制策略,并通过实验验证获得以下结论:
1)相较于40 s采样的传统FFT方法,本文提出的基于电机自传感的振动特征辨识方法在2.12 s内即完成频率估计(5.960 Hz),与FFT基准值(5.975 Hz)误差仅0.25%,但将估算时间缩短94.7%。
2)所提初始条件整形器对主动激励产生的非零初始振动实现了有效抑制,使整体辨识流程耗时缩短了80.8%,大幅提升了系统整体作业效率。
3)针对突发扰动引起的非零初始振动,ZV-IC与ZVD-IC整形器均表现出显著抑制效果,其中ZVD-IC整形器对于参数辨识误差表现出更强的鲁棒性,将残振抑制程度进一步提升69.33%。
虽然上述数据性结论来自于一台实验样机,但是所提出的挠性系统振动抑制方法具有普遍性优势,为挠性伺服系统的研发提供了新的理论思路。
参考文献
[1] Li Bai, Li Xinyuan, Gao Hejia, et al. Advances in flexible robotic manipulator systems: part I: overview and dynamics modeling methods[J]. IEEE/ASME Transactions on Mechatronics, 2024, 29(2): 1100- 1110.
[2] Huang Zhanghao, Shen Jianxin, Chen Yidong, et al. End-point vibration suppression in flexible servo systems based on improved two-mode shaper[J]. IEEE Transactions on Industry Applications, 2025, 61(3): 3919-3930.
[3] 史婷娜, 徐奕扬, 谭本慷, 等. 机器人关节用伺服电机关键技术与展望[J]. 电工技术学报, 2025, 40(19): 6192-6212.
Shi Tingna, Xu Yiyang, Tan Benkang, et al. Key technologies and prospects of the servo motor for robot joints[J]. Transactions of China Electrotechnical Society, 2025, 40(19): 6192-6212.
[4] 李欣, 朱成琨. 碳视角下基于网-车-线耦合的高速列车节能运行优化[J]. 电工技术学报, 2025, 40(22): 7431-7448.
Li Xin, Zhu Chengkun.Energy-efficient operation optimization of high-speed trains based on network- train-line coupling under carbon perspective[J]. Transactions of China Electrotechnical Society, 2025, 40(22): 7431-7448.
[5] 张晓宇, 刘晓峰, 蔡国平, 等. 柔性关节柔性连杆机械臂的动力学建模[J]. 动力学与控制学报, 2022, 20(3): 25-39.
Zhang Xiaoyu, Liu Xiaofeng, Cai Guoping, et al. Dynamic modeling of a flexible-link flexible-joint manipulator[J]. Journal of Dynamics and Control, 2022, 20(3): 25-39.
[6] 丁有爽, 肖曦. 基于负载位置反馈的永磁同步电机驱动柔性负载谐振抑制方法[J]. 电工技术学报, 2017, 32(11): 96-110.
Ding Youshuang, Xiao Xi. Resonance suppression method based on load position feedback for flexible load driven by PMSM[J]. Transactions of China Elec- trotechnical Society, 2017, 32(11): 96-110.
[7] 尚东阳, 李小彭, 尹猛, 等. 采用模糊补偿滑模控制器的空间柔性机械臂振动抑制方法[J]. 振动与冲击, 2024, 43(7): 175-185, 204.
Shang Dongyang, Li Xiaopeng, Yin Meng, et al. Vibration suppression method for space-flexible manipulator using fuzzy compensation sliding mode controller[J]. Journal of Vibration and Shock, 2024, 43(7): 175-185, 204.
[8] Xu Jinquan, Fang Hao, Zhou Tong, et al. Optimal robust position control with input shaping for flexible solar array drive system: a fuzzy-set theoretic approach[J]. IEEE Transactions on Fuzzy Systems, 2019, 27(9): 1807-1817.
[9] 余洋, 田夏, 从乐瑶, 等. 基于反推控制和模态估计的永磁同步电机驱动柔性涡簧储能控制方法[J]. 电工技术学报, 2019, 34(24): 5084-5094.
Yu Yang, Tian Xia, Cong Leyao, et al. Energy storage control method of flexible spiral springs driven by permanent magnet synchronous motor based on backstepping control and modal estimation[J]. Transactions of China Electrotechnical Society, 2019, 34(24): 5084-5094.
[10] 丁有爽, 肖曦. 伺服系统柔性负载建模方法研究[J]. 中国电机工程学报, 2016, 36(3): 818-827.
Ding Youshuang, Xiao Xi. Mathematical modeling of flexible load in servo system[J]. Proceedings of the CSEE, 2016, 36(3): 818-827.
[11] 刘铠源, 杨明. 基于改进有源阻尼的柔性关节机械臂伺服系统振动抑制策略[J]. 电机与控制学报, 2022, 26(7): 20-28.
Liu Kaiyuan, Yang Ming. Vibration suppression strategy for manipulator servo with flexible joints based on improved active damping[J]. Electric Machines and Control, 2022, 26(7): 20-28.
[12] Li Gang, Ma Xin, Li Yibin. Robust command shaped vibration control for stacker crane subject to parameter uncertainties and external disturbances[J]. IEEE Transactions on Industrial Electronics, 2024, 71(11): 14740-14752.
[13] Suksabai N, Chuckpaiwong I. The novel design of the command smoother for sway suppression of industrial overhead crane considering acceleration and deceleration limits[J]. International Journal of Dynamics and Control, 2023, 11(5): 2082-2100.
[14] Vaughan J, Yano A, Singhose W. Comparison of robust input shapers[J]. Journal of Sound and Vibration, 2008, 315(4/5): 797-815.
[15] Chen Yangyang, Yang Ming, Long Jiang, et al. Analysis of oscillation frequency deviation in elastic coupling digital drive system and robust Notch filter strategy[J]. IEEE Transactions on Industrial Elec- tronics, 2019, 66(1): 90-101.
[16] 李建闽, 曹远远, 姚文轩, 等. 基于自适应移频滤波的电力系统谐波分析方法[J]. 电工技术学报, 2024, 39(13): 4015-4024.
Li Jianmin, Cao Yuanyuan, Yao Wenxuan, et al. Power system harmonic analysis method based on adaptive frequency-shift filtering[J]. Transactions of China Electrotechnical Society, 2024, 39(13): 4015- 4024.
[17] Sheu M H, Yang Enchi, Wang S T, et al. High precision, low complexity, and fast calculation based on hybrid recursive DFT and FFT algorithms for electrochemical impedance spectroscopy system[J]. IEEE Transactions on Instrumentation and Measure- ment, 2024, 73: 7507914.
[18] 王照伟, 郭雯君, 宋向金, 等. 融合TKEO和Goerztel算法的感应电机转子断条故障诊断[J]. 电工技术学报, 2024, 39(12): 3679-3690.
Wang Zhaowei, Guo Wenjun, Song Xiangjin, et al. Fault diagnosis of broken rotor bar in induction motor based on TKEO and Goertzel algorithm[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(12): 3679-3690.
[19] 杨明, 曹佳, 徐殿国. 基于输入整形技术的交流伺服系统抖动抑制[J]. 电工技术学报, 2018, 33(21): 4979-4986.
Yang Ming, Cao Jia, Xu Dianguo. Suppression of vibration of AC servo system based on input shaping technique[J]. Transactions of China Electrotechnical Society, 2018, 33(21): 4979-4986.
[20] Huang Zhanghao, Shen Jianxin, Shi Dan, et al. Adaptive vibration suppression control for direct- drive flexible manipulators based on PMSM self- sensing[C]//2024 IEEE 7th Student Conference on Electric Machines and Systems (SCEMS), Macao, China, 2024: 1-6.
[21] Newman D, Hong S W, Vaughan J E. The design of input shapers which eliminate nonzero initial condi- tions[J]. Journal of Dynamic Systems, Measurement, and Control, 2018, 140(10): 101005.
[22] Wahrburg A, Jurvanen J, Niemelä M, et al. Input shaping for non-zero initial conditions and arbitrary input signals with an application to overhead crane control[C]//2022 IEEE 17th International Conference on Advanced Motion Control (AMC), Padova, Italy, 2022: 36-41.
[23] 赖泽楷, 关向雨, 涂嘉毅, 等. 基于激光多普勒测振的电力设备表面振动测量及补偿算法[J]. 电工技术学报, 2025, 40(6): 1707-1717.
Lai Zekai, Guan Xiangyu, Tu Jiayi, et al. Surface vibration measurement and compensation algorithm of power equipment based on laser Doppler vibration[J]. Transactions of China Electrotechnical Society, 2025, 40(6): 1707-1717.
[24] 房钰超, 王博, 王元奎, 等. 电流传感器故障状态下内嵌式永磁同步电机的无位置传感器容错控制算法研究[J]. 电机与控制学报, 2024, 28(8): 1-9.
Fang Yuchao, Wang Bo, Wang Yuankui, et al. Research on sensorless fault-tolerant control algo- rithm for interior permanent magnet synchronous machine under sensor fault conditions[J]. Electric Machines and Control, 2024, 28(8): 1-9.
[25] Karimi-Ghartemani M, Ali Khajehoddin S, Jain P K, et al. Addressing DC component in PLL and Notch filter algorithms[J]. IEEE Transactions on Power Electronics, 2012, 27(1): 78-86.
[26] Ha Changwan, Lee D. Analysis of embedded pre- filters in motion profiles[J]. IEEE Transactions on Industrial Electronics, 2018, 65(2): 1481-1489.
Abstract Flexible servo systems driven by permanent magnet synchronous motors (PMSMs) often experience significant elastic deformations during servo positioning, resulting in residual vibrations characterized by multiple modes and low damping after motion completion. These vibrations, typically featuring high-order dynamics, nonlinearity, and strong coupling, degrade the transient positioning accuracy and operational efficiency of servo systems. Furthermore, persistent vibrations can induce mechanical fatigue or even lead to safety-critical failures. As a result, effective vibration suppression has become a key topic in modern high-performance servo drives. Conventional input shaping techniques are primarily designed to suppress residual vibrations generated during servo motion, but are insufficient to mitigate non-zero initial vibrations before motion initiation. In addition, current flexible servo systems face several limitations: (1) the absence of an integrated mechanism for dynamic characteristic identification and coordinated vibration suppression targeting non-zero initial vibrations; (2) an inherent trade-off between computational efficiency and estimation accuracy in existing online frequency acquisition methods; (3) firm reliance on additional vibration sensors for vibration suppression.
This paper proposes a composite control method that integrates motor self-sensing technology with input shapers. This method relies on the PMSM rotor position and stator current signals to achieve online vibration characteristic identification and coordinated vibration suppression, without requiring offline frequency acquisition and offline redesign of input shapers. Specifically, based on the dynamic model of the PMSM direct-drive flexible system, a torsional torque observer is constructed. The vibration frequency and phase of the lowest-order mode of the flexible beam are then identified online using a second-order generalized integrator frequency-locked loop (SOGI-FLL). The zero-vibration under initial condition (ZV-IC) shaper and the zero-vibration and derivative under initial condition (ZVD-IC) shaper are designed. Thus, integrated functionality is provided, comprising real-time extraction of vibration characteristics, online tuning of input shaper parameters, and active suppression of non-zero initial vibrations.
The traditional fast Fourier transform (FFT) method requires 40 seconds of sampling. In contrast, the proposed motor self-sensing-based vibration characteristic identification method completes frequency estimation in only 2.12 seconds, achieving a relative frequency estimation error of 0.25% compared to the FFT baseline while reducing the estimation time by 94.7%. The proposed initial condition input shaper effectively suppressed non-zero initial vibrations, shortening the overall identification process duration by 80.8%. Both ZV-IC and ZVD-IC shapers demonstrate remarkable suppression performance against sudden disturbances that generate non-zero initial vibrations. ZVD-IC exhibits superior robustness to parameter identification errors and further enhances residual vibration suppression by an additional 69.33%.
Overall, the proposed integrated control scheme provides a sensorless, computationally efficient, and robust solution for suppressing non-zero initial vibrations in PMSM-driven flexible systems. It offers substantial practical value for enhancing performance in advanced servo-driven engineering equipment.
keywords:Flexible system, permanent magnet synchronous motor, vibration suppression, motor self- sensing technology, non-zero initial condition
DOI: 10.19595/j.cnki.1000-6753.tces.250500
中图分类号:TM301.2
浙江省自然科学基金重大项目(LD24E070002)资助。
收稿日期 2025-03-28
改稿日期 2025-05-19
黄彰浩 男,1997年生,博士研究生,研究方向为永磁同步电机驱动的挠性系统控制。E-mail: Zhanghao_H@zju.edu.cn
沈建新 男,1969年生,教授,博士生导师,研究方向为电机与驱动控制、新能源技术。E-mail: J_X_Shen@zju.edu.cn(通信作者)
(编辑 崔文静)