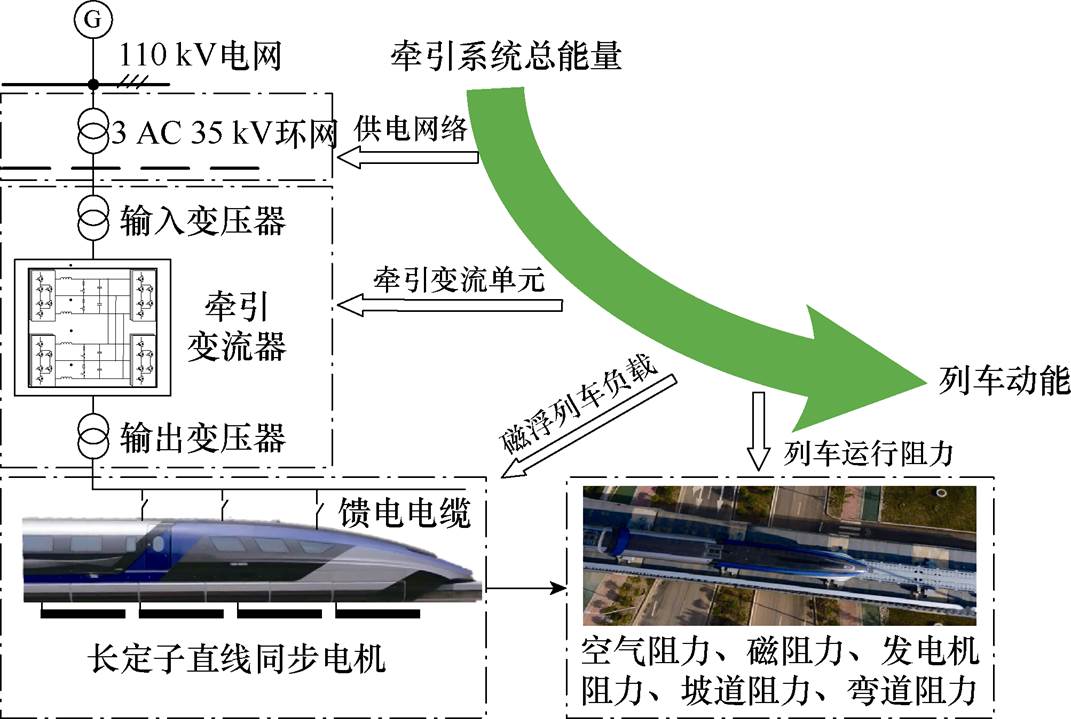
图1 高速磁浮牵引供电系统能量传输路径
Fig.1 Energy transfer path of high-speed maglev traction power supply system
摘要 针对高速磁浮列车双端供电模式中亟待解决的环流与馈电网络损耗问题,该文提出一种基于动态电流分配与牵引变电站布局的双维度协同优化策略。首先,通过建立环流抑制与馈电网络损耗的协同优化模型,提出基于电缆长度反比原则的动态电流分配策略,旨在同步达成消除环流与降低损耗的双重目标;其次,面向高速实验与常态运营两种典型工况,从系统顶层设计维度分别构建牵引变电站空间布局的差异化优化方案,以实现馈电网络损耗的二次优化;最后,通过硬件在环实验结果表明,动态电流分配策略可有效消除并联逆变器环流,并将馈电网络损耗降低达50.3%;牵引变电站优化布局策略有效解决了电流优化分配可能引发的逆变器功率不均衡问题,在高速实验工况下最高可提升牵引效率11.3%,在常态运营工况下最高可提升3.2%。该文研究内容可为高速磁浮牵引供电系统的能效优化提供理论支撑。
关键词:高速磁浮列车 双端供电模式 馈电网络 损耗优化
在轨道交通领域提质增效的需求驱动下,高速磁浮牵引供电系统的能效优化已成为突破工程化应用瓶颈的关键方向[1]。区别于传统轮轨交通,高速磁浮牵引供电系统特有的“分段式长定子供电”架构呈现双重技术特征:一方面,非接触式牵引技术通过消除轮轨摩擦和机械传动环节,实现了传统系统固有损耗的归零;另一方面,长距离分段供电的拓扑特性会不可避免地产生较多的馈电损耗[2]。
高速磁浮牵引供电系统能量传输路径如图1所示,磁浮列车运行过程中,牵引变电站通过动态切换的馈电网络向列车所处区段的定子绕组供电。该过程需同步实现直线电机动态行波磁场的精确构建与长距离电能传输的能效维持。从能量耗散视角分析,传输路径中的输入/输出变压器、牵引逆变器和牵引电机的损耗属于由自身物理参数主导的设备本征损耗,而馈电网络损耗则受控于供电模式的选择和牵引变电站的空间布局[3]。
图1 高速磁浮牵引供电系统能量传输路径
Fig.1 Energy transfer path of high-speed maglev traction power supply system
双端供电模式作为高速磁浮牵引供电系统的结构性创新,其本质是通过并联逆变器架构设计突破单逆变器供电的容量限制。列车动态运行工况下,逆变器与通电定子段的馈电电缆阻抗呈现时变非对称特性[4]。该现象使牵引供电系统面临双重挑战:未建立实时优化的电流分配策略将导致馈电网络损耗加剧且逆变器间产生环流;同时,牵引变电站的空间布局差异会引发双侧馈线长度失配,进一步放大阻抗不平衡效应。因此,开展双端供电模式下动态电流分配策略与变电站布局优化研究,成为实现系统级能效优化的关键路径。
目前双端并联供电的研究呈现显著方向性失衡:环流抑制方向已初步形成完善的理论体系[5-7],而馈电损耗优化方向的研究深度明显不足。文献[8]通过建立并联逆变器多物理场耦合模型,揭示了消除环流的本质条件,即输出电压在频率、相位及幅值维度实现全参数同步匹配。文献[9]建立了三电平逆变器模块化并联系统的中点电流与零序环流耦合模型,提出基于冗余小矢量调节的协调控制策略,同步实现了零序环流抑制和中点电位波动平衡的双重目标。文献[10]通过建立延时补偿机制解决了高速磁浮双端供电模式下馈电电缆信号传输延迟问题,但完全忽视了电缆长度动态变化导致的损耗问题。文献[11]提出了离散多级电流分配比控制策略,虽实现了馈电网络损耗的阶梯式优化,却因控制参数离散化导致系统无法达成动态连续最优控制。文献[12]通过等功率动态分配方法实现了并联逆变器功率均衡控制,然而其对非对称负载工况下环流生成机理与电流分配方式的理论分析尚存完善空间。
当前针对能量传输效率的高速磁浮牵引变电站配置优化理论研究仍处于空白状态。既有工程实践表明,不同技术路线下的牵引变电站配置存在显著差异。文献[13]通过横向对比国内外磁浮牵引供电系统,指出上海常导高速磁浮示范线采用线路两端布置两座牵引变电站的双端分布式供电架构。文献[14]解析的日本超导磁浮山梨实验线则采用线路中点布局一座牵引变电站的单端供电模式。值得注意的是,现有研究在变电站布局决策中主要依赖传统可靠性指标,尚未建立线路损耗与空间参数的量化关联模型,导致变电站优化缺乏系统性理论支撑。
本文针对高速磁浮列车双端供电模式下面临的馈电网络损耗与环流问题,提出基于动态电流分配和牵引变电站布局的双维度协同优化方法。首先基于动态电流分配策略,建立了环流与馈电损耗协同优化模型,同步实现环流抑制与馈电损耗优化的双重目标。其次从牵引变电站布局的顶层设计维度,分别针对高速实验和常态运营两种典型工况,提出差异化最优布局方法,实现馈电网络损耗的二次优化。最终基于RT-Lab半实物硬件在环实验平台,验证了所提方法的有效性。
高速磁浮牵引变电站是配置牵引功率模块的核心设施,其主要功能是通过牵引功率模块向沿轨道两侧铺设的长定子直线电机定子绕组分段供电。根据定子段换步控制方式差异,牵引功率模块可分为两种典型结构:集成双逆变器单元H2型和集成三逆变器单元H3型。
上海磁浮示范运营线作为国内唯一商业化运营的高速磁浮线路,采用30 km双线折返运行架构。线路采用两端建造两座牵引变电站,即双逆变器双端布局(Dual End-to-End Configuration, DEEC)的方式,每站配置两套H3型高功率模块,每套模块包含3套15 MV·A三电平中点钳位(Neutral Point Clamped, NPC)式逆变器单元[15]。这种设计方案使系统具备三步法换步与系统冗余容错能力,单线轨道的牵引变电站布局如图2所示。
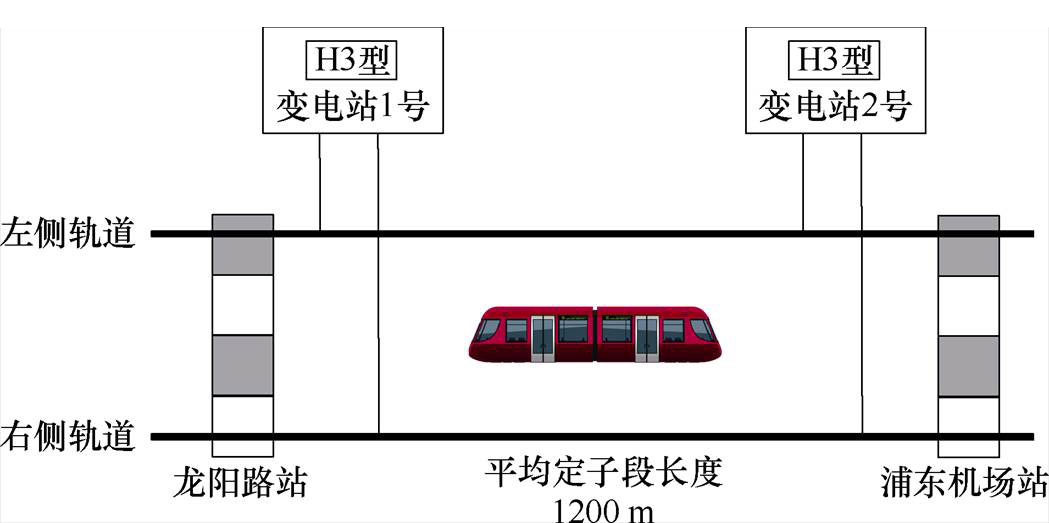
图2 上海常导高速磁浮示范运营线牵引变电站布局
Fig.2 Layout of traction substation for Shanghai high-speed maglev demonstration operation line
磁浮列车运行过程中,只有列车所在定子段供电,此时牵引供电系统如图3所示。供电模式根据列车位置动态调整:当列车处于首段或末段定子时,分别由龙阳路站或浦东机场站单端供电;其余区段则启用双端供电模式。在双端供电模式下,系统采用两变电站输出电流等比例分配(Current Equal Sharing, CES)策略,即每个变电站输出电流为长定子直线同步电机输入电流的一半。这一调控方式控制简单易实现,且能尽量保证两台逆变器输出功率接近。然而由于列车运行过程中馈电电缆长度不断发生变化,这种分配方式在产生较大的环流的同时,会带来较高的馈电网络损耗[16]。
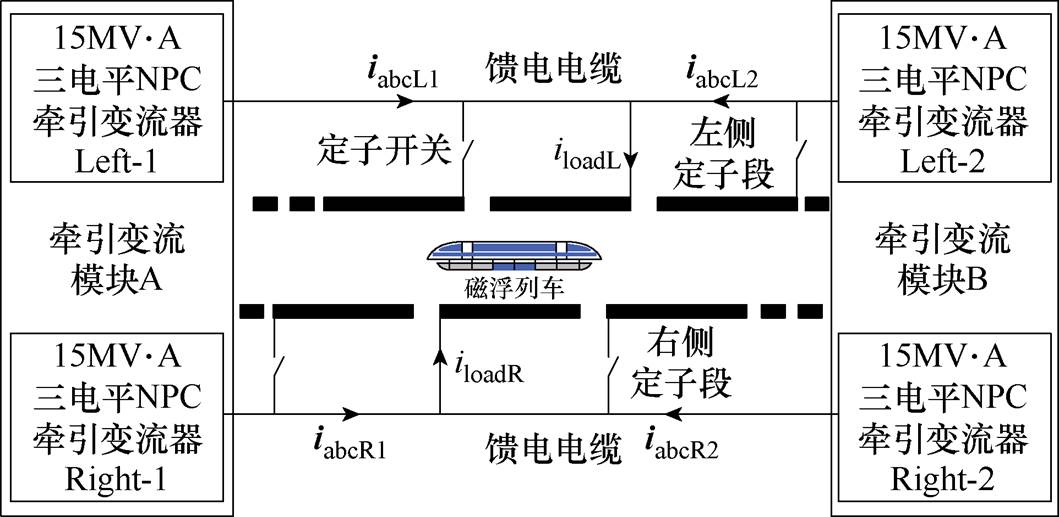
图3 列车运行过程中的牵引供电系统
Fig.3 Traction power supply system during train operation
长定子直线同步电机的阻抗、反电动势及馈电网络阻抗均与磁浮列车运行速度密切相关。在低速运行区间,采用单端供电模式即可满足牵引需求。当进入高速工况后,牵引功率呈现急剧的非线性增加,需切换至双端供电模式,长定子直线同步电机单/双端供电模式示意图如图4所示[17]。图4中,ua、ub、uc和ia、ib、ic分别为长定子直线同步电机的定子绕组端部电压和定子绕组三相电流;ua1、ub1、uc1和ia1、ib1、ic1分别为逆变器1的输出电压和输出电流;ua2、ub2、uc2和ia2、ib2、ic2分别为逆变器2的输出电压和输出电流。
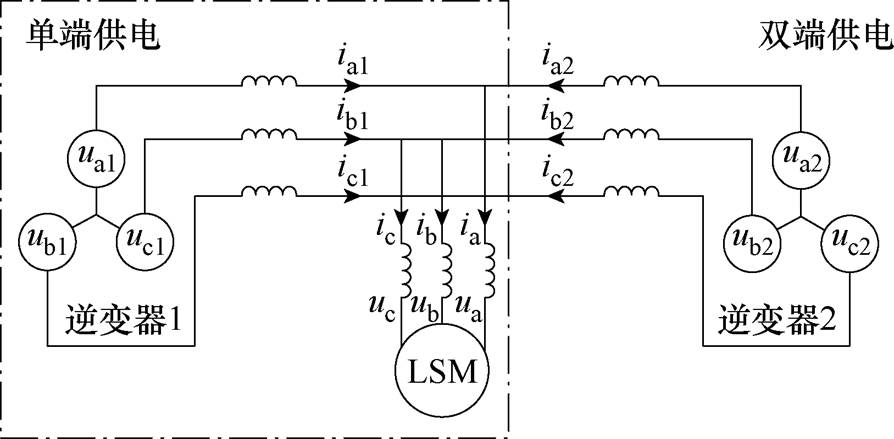
图4 长定子直线同步电机单/双端供电模式示意图
Fig.4 Schematic diagram of single/dual feeding mode for long-stator linear synchronous motor
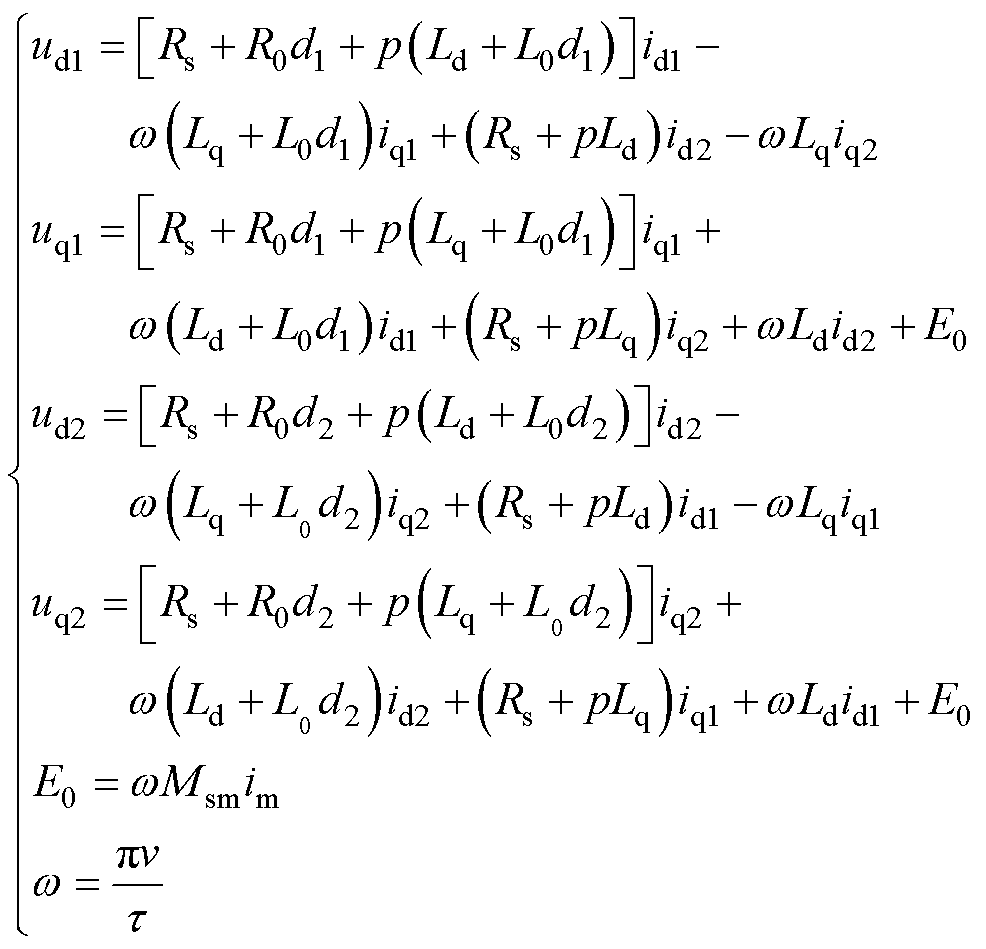
根据图2并结合参考文献[18]中的推导,可得到采用等幅变换的双端供电模式下的长定子直线同步电机在dq坐标系下的数学模型为
 (1)
(1)
式中,ud1、uq1和id1、iq1分别为逆变器1的输出电压和输出电流在d、q坐标系下的分量;ud2、uq2和id2、iq2分别为逆变器2的输出电压和输出电流在d、q坐标系下的分量;Rs为定子电阻;Ld、Lq分别为定子绕组在d、q坐标系下的电感;R0、L0分别为单位长度馈电电缆的电阻和电感;d1、d2为两侧馈电电缆的长度;E0为电机反电动势; 为动子角速度;Msm为定子与转子间的互感;im为励磁电流;v为列车速度;
为动子角速度;Msm为定子与转子间的互感;im为励磁电流;v为列车速度; 为极距;p为微分算子。
为极距;p为微分算子。
在并联逆变器系统中,环流是指由并联逆变器间的电压差驱动,仅在逆变器内部及连接线路中循环而不流经负载的无效电流。环流不参与能量传输,且会产生额外损耗和破坏供电系统稳定性[19]。在并联逆变器存在电压差的前提下,线路阻抗差异、逆变器内阻差异及控制信号偏差均有可能引发环流。
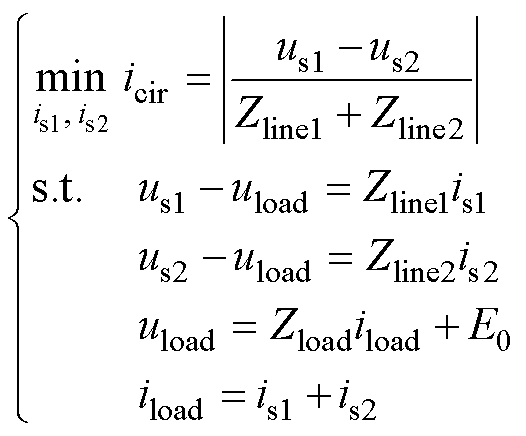
为更便于分析长定子直线同步电机双端供电模式下的环流,可简化双端供电等效电路如图5所示。根据基尔霍夫电压定律可知,当us1与us2的电动势差最小时,线路中环流最小[20]。基于此,本文建立双端供电模式下环流最小的动态电流优化分配模型为
 (2)
(2)
其中
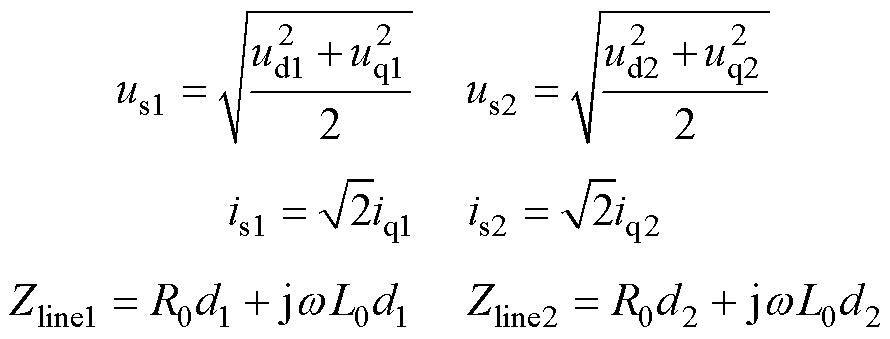
式中,icir为环流;us1、us2和is1、is2分别为逆变器1、逆变器2的相电压和相电流有效值;uload、iload分别为电机负载的相电压和相电流有效值;Zline1、Zline2为两侧馈电电缆的阻抗;Zload为电机定子阻抗。
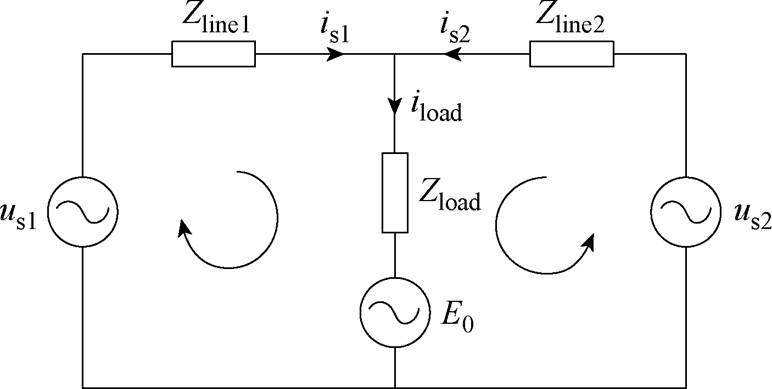
图5 长定子直线同步电机双端供电等效电路
Fig.5 Equivalent circuit of dual-terminal power supply for long stator linear synchronous motor
通过分析式(2)可知,目标函数的最小值对应于|us1-us2|的最小值。由于绝对值的非负性,当且仅当us1=us2分子取得最小值0,此时icir为全局最小值。对式(2)进行化简求解,可得目标函数最小时的逆变器电流分配比例为
 (3)
(3)
环流最小时,馈电网络的损耗功率为
 (4)
(4)
式中,PLoss为牵引系统馈电网络的损耗功率。
由式(3)可知,在列车行驶过程中,采用逆变器输出电流与相连馈电电缆长度成反比的电流分配(Current Length-Inverse Sharing, CLIS)策略时,逆变器间环流最小。
在双端供电过程中,两台逆变器通过阻感参数随列车位置和速度动态变化的馈电网络为直线电机供电。电机定子电流由牵引需求决定,其定子绕组损耗功率由电流和电阻决定,因而无法通过电流分配策略优化。然而,由于两台逆变器各提供部分电流,其动态分配将直接影响馈电网络的损耗功率。基于此,本文建立了馈电网络损耗功率最小的动态电流优化分配模型为
 (5)
(5)
将目标函数化简,并引入总电流约束可得
 (6)
(6)
将目标函数展开对is1求导,并令导数为0可得
 (7)
(7)
求解导数为0的临界点为
 (8)
(8)
证明该临界点为最小值,对二阶导数检验得
 (9)
(9)
基于上述分析可知,当馈电网络损耗功率最小时,两台逆变器的电流分配比例为
(10)
此时,馈电网络的损耗功率为
(11)
基于动态电流分配模型的最优解分析表明,馈电网络损耗功率最小化与环流抑制双目标优化问题存在唯一帕累托最优解,即CLIS策略。这种数学一致性揭示了电缆阻感参数与长度的正相关关系,为多目标协同优化提供了物理基础:当馈电网络采用对称拓扑设计时,阻抗匹配特性使得环流抑制与损耗最小化目标呈强耦合关系。
在实际工程应用中,逆变器额定容量约束使得电流反比分配策略易导致双侧设备功率失衡。此时,单侧逆变器因容量饱和而丧失电流调节能力,而另一侧逆变器则处于低功率工况。因此,需要通过馈电线路参数可行域分析,构建容量约束条件下的能效优化策略。本文通过建立约束模型,精确界定理论最优策略的工程适用边界与失效临界值,为工程实践提供量化设计准则。
在逆变器容量约束下,每台逆变器输出需满足
 (12)
(12)
式中,S为逆变器容量。
采用最优电流分配策略时,两台逆变器的电压均为u,将其与电流共同代入式(12)则有
 (13)
(13)
令两侧馈电电缆的长度比 ,则有
,则有
 (14)
(14)
对式(14)进行分析,可得出不同场景下的最优电流分配策略适用范围:
(1)当S≥3uiload时,逆变器容量充足,所提优化策略无条件适用,此时 为任意不小于0的实数。
为任意不小于0的实数。
(2)当1.5uiload≤S<3uiload时,需严格控制电缆比例,此时
 (15)
(15)
(3)当S<1.5uiload时,必须保证两侧电缆长度相等;否则,至少一台逆变器过载。此时所提优化策略仅在=1时有效。
(4)当逆变器容量不足或两侧馈电电缆比例超出允许范围时,需放弃理论最优策略,改用加权分配为
 (16)
(16)
本文提出的并联逆变器环流-馈电损耗协同优化策略受馈电电缆长度不对称性约束,其物理本质源自牵引变电站空间布局差异引起的馈电网络阻抗参数不对称。本文以列车单线运行时的单条轨道为研究对象,通过分析高速实验和常态运营两种工况,构建双端供电模式下以能耗最小化为目标的牵引变电站空间布局优化方案。
双端供电模式下,馈电网络损耗与电流分配策略及牵引变电站空间布局存在强耦合关系。为实现变电站布局优化,需以电流分配策略和列车运行工况的确定为前提。当列车处于高速实验工况且采用CES策略时,双端供电模式的馈电网络损耗主要来源于电流流经电缆产生的焦耳损耗,其值与供电点到负载的距离成正比。为实现变电站布局优化,逆变器最优空间布局的数学决策模型建立为变电站坐标位置c1、c2的函数,即
 (17)
(17)
式中,Eloss为列车运行全程馈电网络总损耗;c1、c2分别为逆变器1和逆变器2在线路上的坐标位置;d为线路总长度,是优化问题的边界约束。
由对称性原理可知,两台逆变器对称布置在线路中点两侧时,馈电网络损耗最小,因此令
 (18)
(18)
式中,h为逆变器位置相对于线路中点的水平偏移量。
将最小损耗目标函数的积分项进行分段积分得
 (19)
(19)
目标函数最优解为 =0,此时馈电网络损耗和逆变器位置为
=0,此时馈电网络损耗和逆变器位置为
 (20)
(20)
由式(20)可知,在高速实验工况且采用CES电流分配策略时,采用双逆变器中点共址布局(Dual Midpoint Co-located Configuration, DMCC)可使馈电网络损耗达到理论最小值。此时,牵引变电站布局如图6所示。
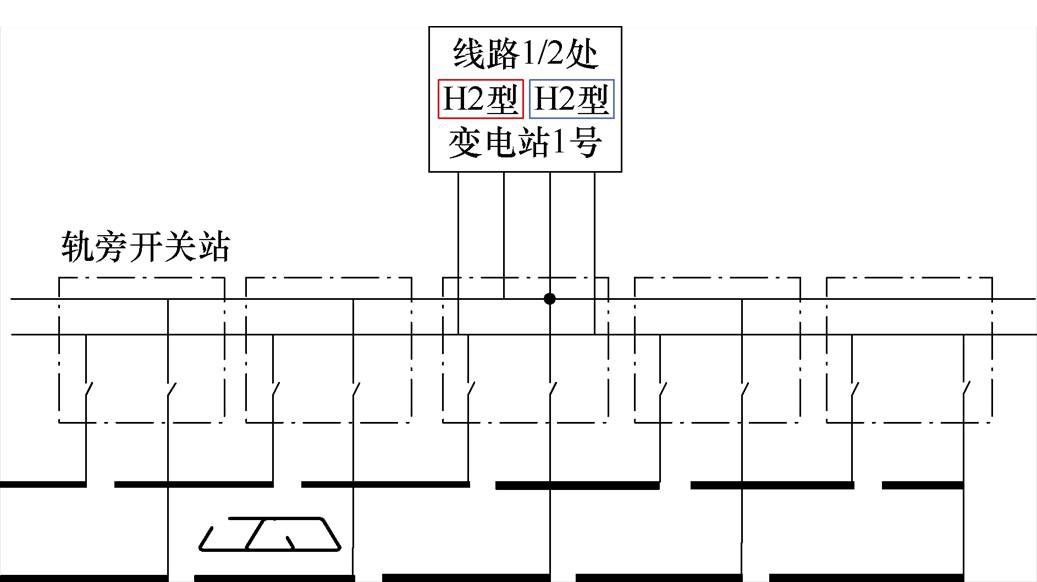
图6 双端供电CES策略下变电站最优布局
Fig.6 Optimal substation layout under dual feeding mode with CES strategy
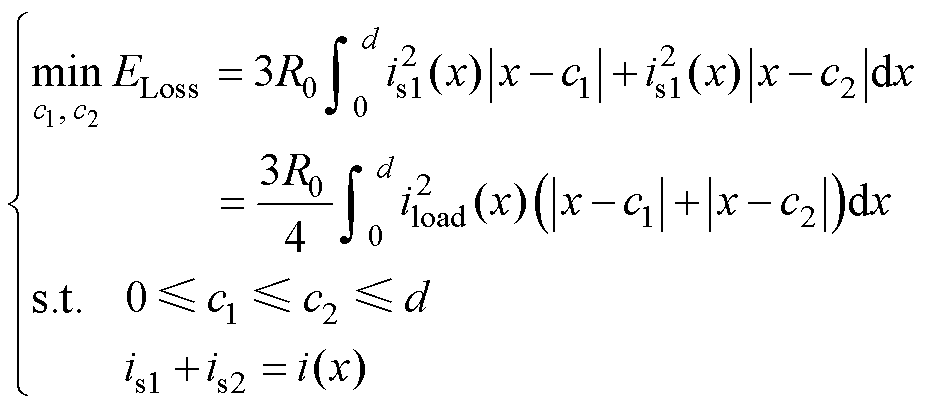
由于上述方案在CLIS策略下的馈电网络损耗未必全局最优,为保证所提优化理论的完整性,需进一步构建双端供电模式CLIS策略下的馈电网络损耗最小化数学模型为
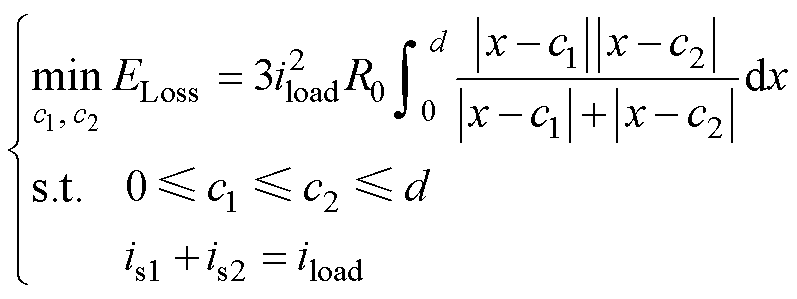 (21)
(21)
将目标函数的积分项进行分段积分得
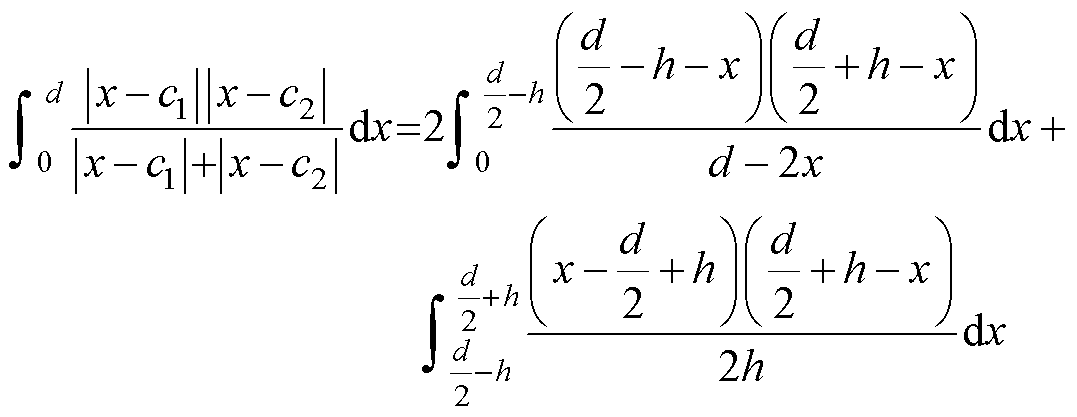 (22)
(22)
采用数值分析法可得目标函数的最优解为
 (23)
(23)
此时,馈电网络总损耗为
 (24)
(24)
由式(24)可知,在双端供电模式CLIS策略下,采用两台逆变器对称偏移布局(Dual Symmetric Offset Configuration, DSOC)时,馈电网络损耗达到理论最小值,其损耗相较DMCC-CES策略降低约26.4%。此时,牵引变电站布局如图7所示。
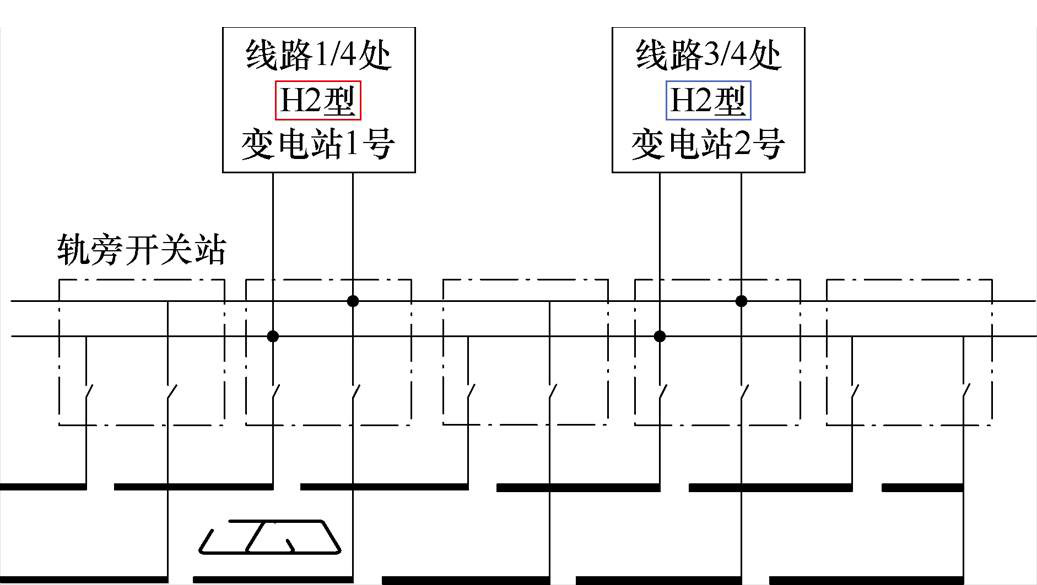
图7 双端供电CLIS策略下变电站最优布局
Fig.7 Optimal substation layout under dual feeding mode with CLIS strategy
在高速实验工况下,当两台逆变器采用中点共址布局时,本文提出的DMCC-CES与DMCC-CLIS策略具有等效性。此方案不仅完全消除了环流与损耗协同优化对逆变器容量的限制,赋予动态电流分配策略全局适用性,还可通过共享牵引变电站显著降低建造成本。然而,当采用CLIS策略时,虽然牵引变电站的对称偏移布局可实现双端供电模式下馈电网络全局损耗最小化,但该策略仍受逆变器实际容量限制,且需独立建造两座牵引变电站。
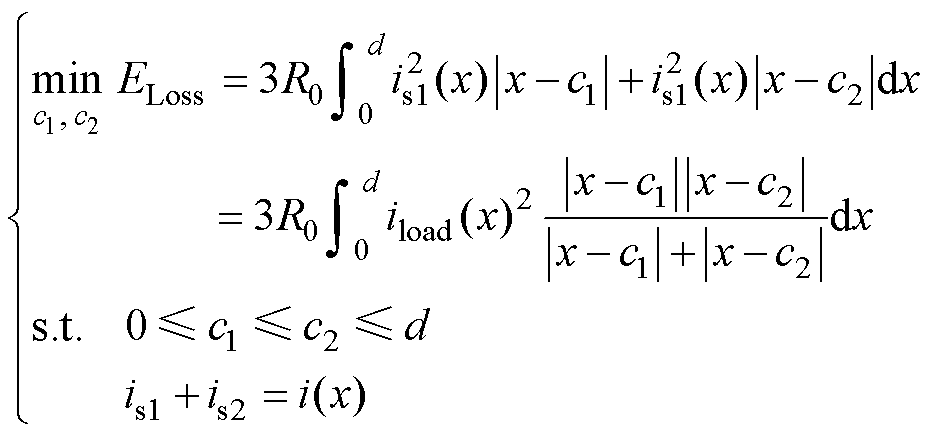
基于高速实验工况提出的牵引变电站最优配置方案,其理论前提是列车全程加减速运行,该方案适用于特定实验需求或长大干线具有相似运动特征的区段。然而,上海磁浮示范线采用单分区运营模式,常态运营要求列车在分区内完成加速—匀速—减速全周期运行,各阶段电机电流呈现显著时变特性。为契合工程实际需求,需针对运营工况构建融合位置-电流权重因子的变电布局数学模型。
磁浮列车运行可大致分为启动加速、匀速运行和减速制动三个阶段。鉴于列车运行速度曲线动态变化但电流分布规律可解析表征(加减速段为高电流iH,匀速段为低电流iL),本文建立分段参数化优化模型确定逆变器位置参数,以最小化馈电网络损耗。该分段参数化模型具有普适适配能力,即针对任意给定运行速度曲线,可通过提取其加减速段占比及高低电流比等特征参数,计算牵引变电站最优布局位置。
当双端供电采用CES策略时,优化模型为
 (25)
(25)
其中

式中,iload(x)为不同位置处的电机电流;iH为加速段和减速段的高电流;iL为匀速段的低电流;k1、k2分别为加速段和减速段占线路总长度的比例。
通过分析目标函数,可知最优解满足对称性条件 ,因此式(25)可简化为
,因此式(25)可简化为
 (26)
(26)
逆变器最优位置 满足带权中位数条件,即
满足带权中位数条件,即
 (27)
(27)
此时,优化模型可根据实际线路的加速段、匀速段及减速段距离,计算权重积分得出平衡点。
当双端供电采用CLIS策略时,优化模型为
 (28)
(28)
鉴于目标函数具有分段式非线性特征,解析解难以直接获取,需基于实际运行工况采用优化算法求取数值最优解。
为验证所提能效优化与环流抑制策略的有效性,本文搭建了如图8所示的高速磁浮半实物系统。该系统由RT-Lab测试平台和牵引控制系统两部分组成,系统仿真步长为900 ns。RT-Lab测试平台包含四套有源中点钳位型三电平逆变器仿真子系统,以及一套长定子直线同步电机仿真子系统。
变电站的优化设计与列车运行过程中不同位置处的电流分布密切相关,且高速实验与常态运营工况下的电流分布呈现显著差异,因此本文基于上海高速磁浮示范运营线的实际线路数据,在高速磁浮牵引半实物系统上,选取这两种典型工况开展了硬件在环实验。实验采用的牵引供电系统参数见表1[21-22],其中牵引控制系统采用id=0的转子磁场定向控制策略,定子段换步方式为两步法换步。

图8 高速磁浮牵引半实物系统
Fig.8 Semi-physical traction system of high-speed maglev
表1 牵引供电系统参数
Tab.1 Traction power supply system parameters
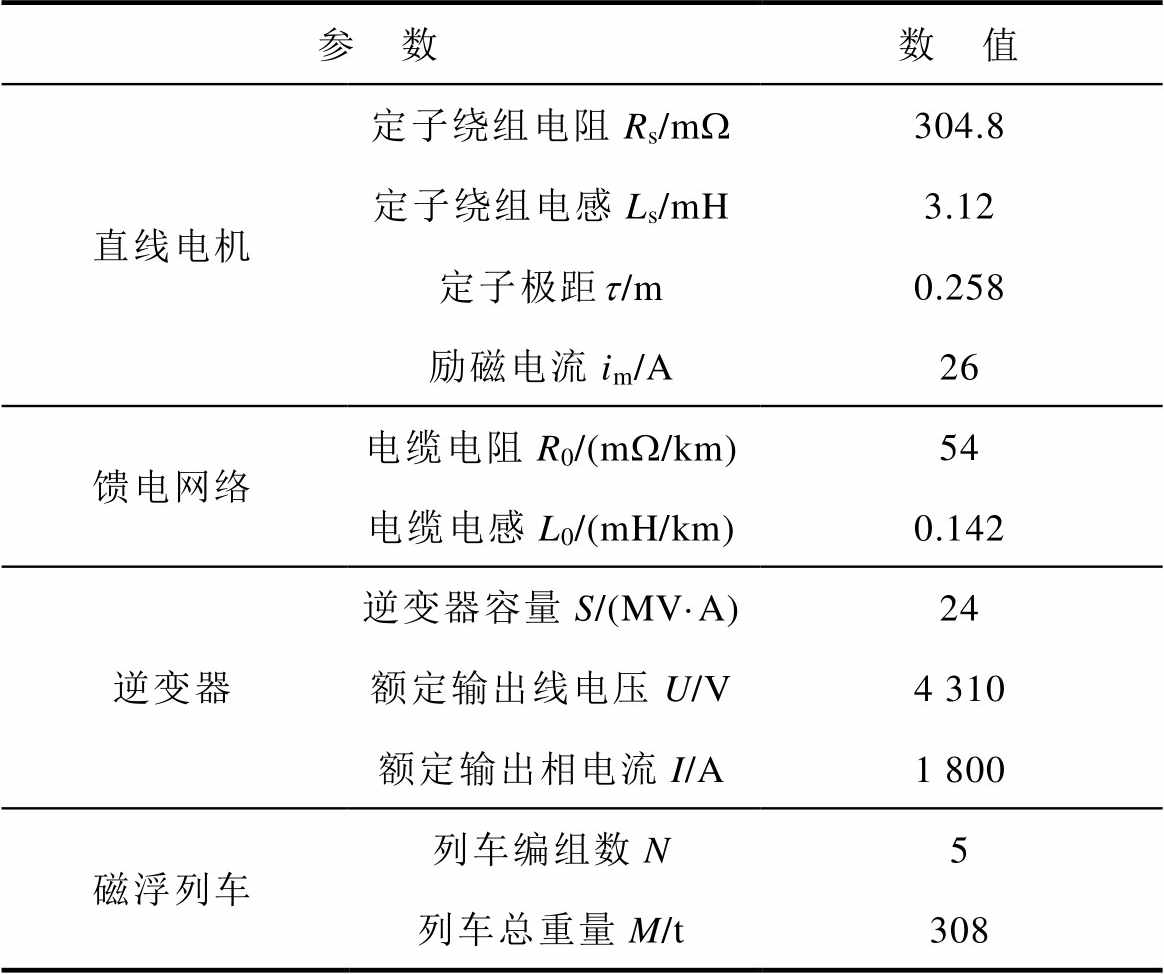
参 数数 值 直线电机定子绕组电阻Rs/mW304.8 定子绕组电感Ls/mH3.12 定子极距t/m0.258 励磁电流im/A26 馈电网络电缆电阻R0/(mW/km)54 电缆电感L0/(mH/km)0.142 逆变器逆变器容量S/(MV·A)24 额定输出线电压U/V4 310 额定输出相电流I/A1 800 磁浮列车列车编组数N5 列车总重量M/t308
在高速实验工况下,控制电机输入电流相同,DEEC-CES、DEEC-CLIS、DMCC-CES、DSOC-CLIS四种策略实验得到的速度与里程曲线均相同,如图9所示。该工况下列车最高速度可达506 km/h。
在高速实验工况下,双端供电模式采用CES与CLIS策略下的实验结果如图10所示,PLoss为馈电网络损耗功率,S1、S2分别为两台逆变器视在功率。由图10a可知,在DEEC-CES策略下两台逆变器输出电流保持严格同步。当列车临近线路端部变电站时,因线路阻抗失配导致环流达600 A,此时馈电网络损耗功率呈现先增后减的线性变化趋势。两台逆变器视在功率始终接近,最大视在功率为20 MV·A。由图10b可知,在DEEC-CLIS策略下逆变器输出电流与所连电缆长度成反比,通过合理动态分配两台逆变器电流有效消除环流。馈电网络损耗功率呈正态分布特征,当列车接近线路端部时,存在逆变器输出功率非均衡分布现象,逆变器最大视在功率为22 MV·A。
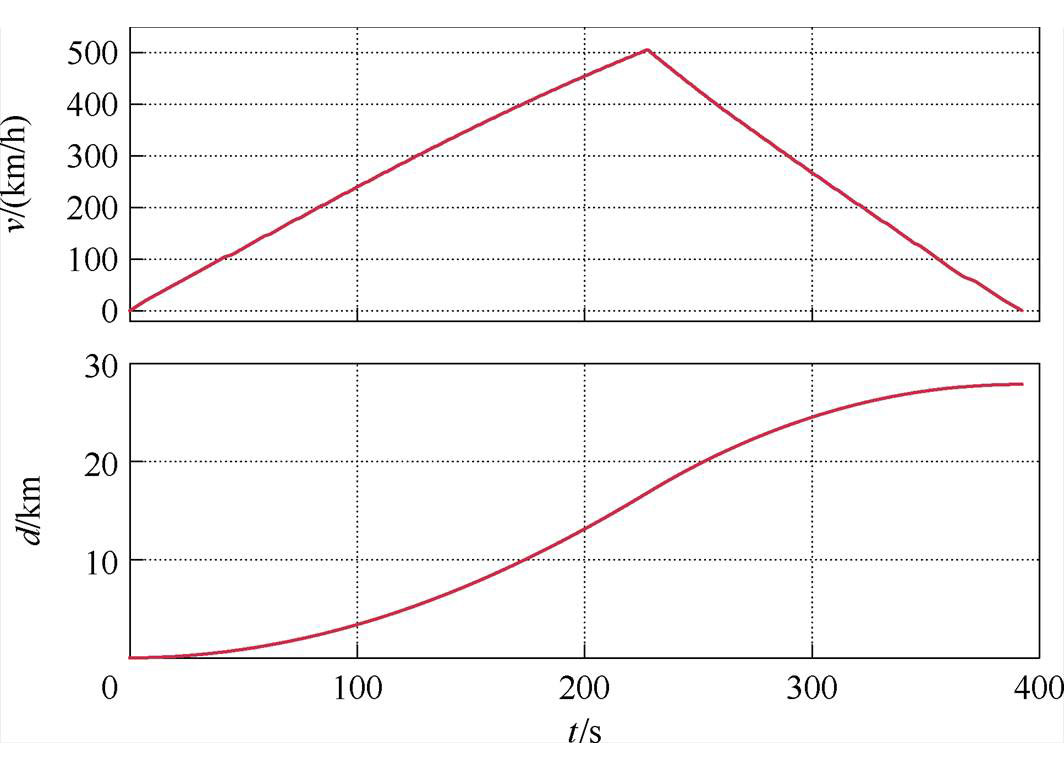
图9 高速实验工况下列车的速度和里程曲线
Fig.9 Speed and mileage curves of train under high speed test condition
牵引变电站空间布局直接影响两台逆变器所连馈电电缆参数,采用DMCC和DSOC两种布局方式的实验结果如图11所示。由图11a可知,在DMCC- CES策略下,得益于共址布局形成的对称负载结构,两台逆变器实现输出电流与视在功率的严格同步,最大视在功率为15 MV·A。CES与CLIS策略在逆变器共址条件下呈现等效性,环流维持在零值状态。此时馈电网络损耗功率不超过2 MW。由图11b可知,采用DSOC-CLIS策略时,通过动态电流分配机制有效消除环流,馈电网络最大损耗功率降至1.5 MW。当列车临近牵引变电站时,出现逆变器功率非均衡分配现象,最大视在功率为24 MV·A。

图10 高速实验工况下不同电流分配策略的实验波形
Fig.10 Experimental waveforms of different current distribution strategies under high speed test conditions
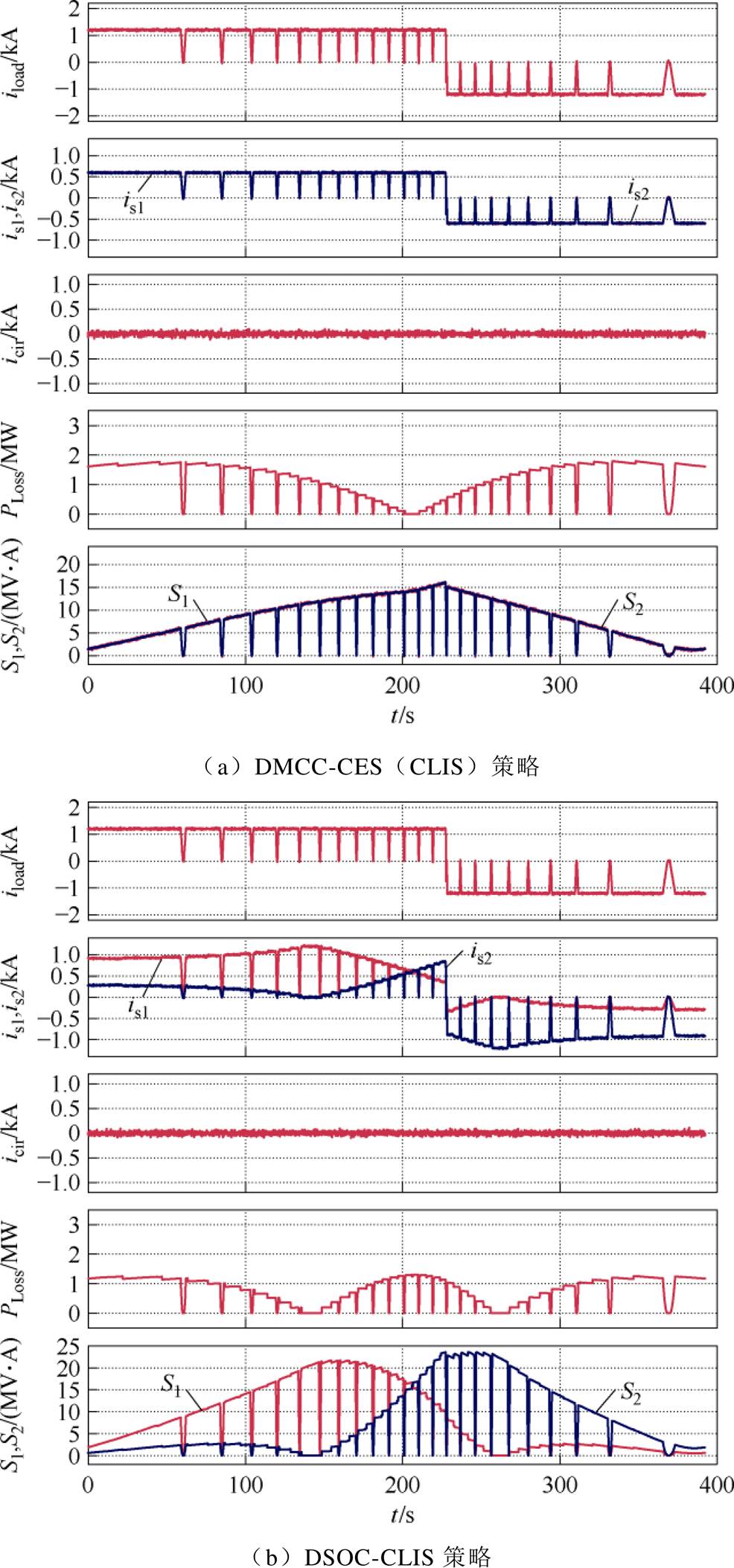
图11 高速实验工况下不同变电站布局的实验波形
Fig.11 Experimental waveforms of different substation layouts under high speed test conditions
高速实验工况下,不同优化策略的牵引供电系统能耗、效率与馈电网络损耗见表2。由表2可知,上海磁浮运营线现行DEEC-CES策略的环流与馈电网络损耗均居最高水平,最大环流达600 A,馈电损耗达213.84 kW·h。相较于DEEC-CES策略,本文提出的CLIS策略不仅能完全消除环流,更使馈电损耗下降50%至106.92 kW·h。通过牵引变电站布局优化,可进一步降低馈电网络损耗并提升系统效率,其中DSOC策略实现全局最优馈电损耗88.71 kW·h,对应的牵引效率为81.5%;而DMCC布局虽馈电损耗较高为131.85 kW·h,但其牵引效率达84.4%,同时逆变器容量需求降低37.5%,且通过单牵引变电站布局降低建造成本、简化系统架构。
表2 高速实验工况下不同优化策略的能耗与效率
Tab.2 Energy efficiency of different optimization strategies under high speed test conditions
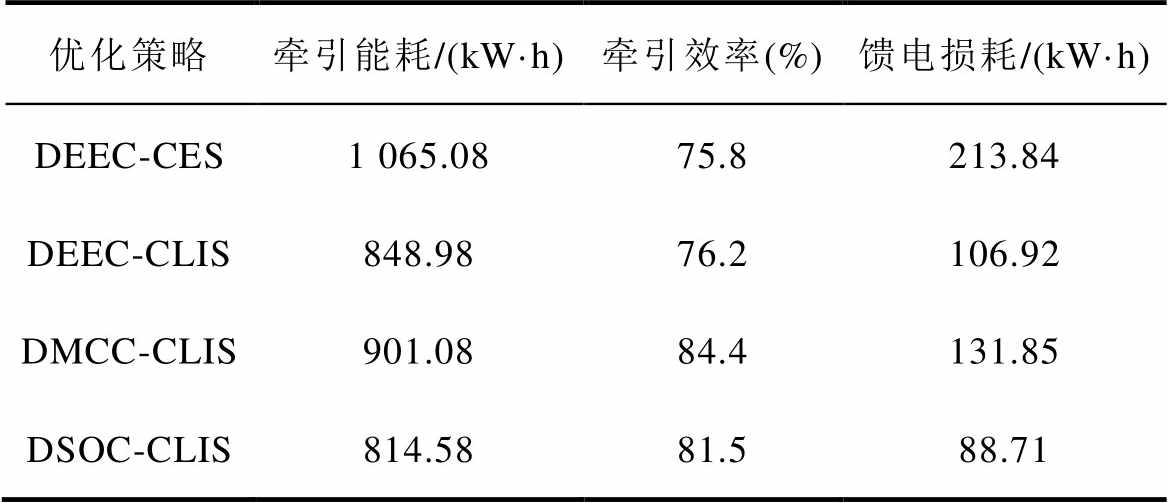
优化策略牵引能耗/(kW·h)牵引效率(%)馈电损耗/(kW·h) DEEC-CES1 065.0875.8213.84 DEEC-CLIS848.9876.2106.92 DMCC-CLIS901.0884.4131.85 DSOC-CLIS814.5881.588.71
常态运营工况下的变电站布局优化与线路条件及运营工况密切相关。为验证所提优化策略在常态运营下的有效性,本文选取线路长度27.87 km、最高运营时速430 km/h的上海高速磁浮示范运营线为研究对象,列车实测路程-速度曲线如图12所示[23]。
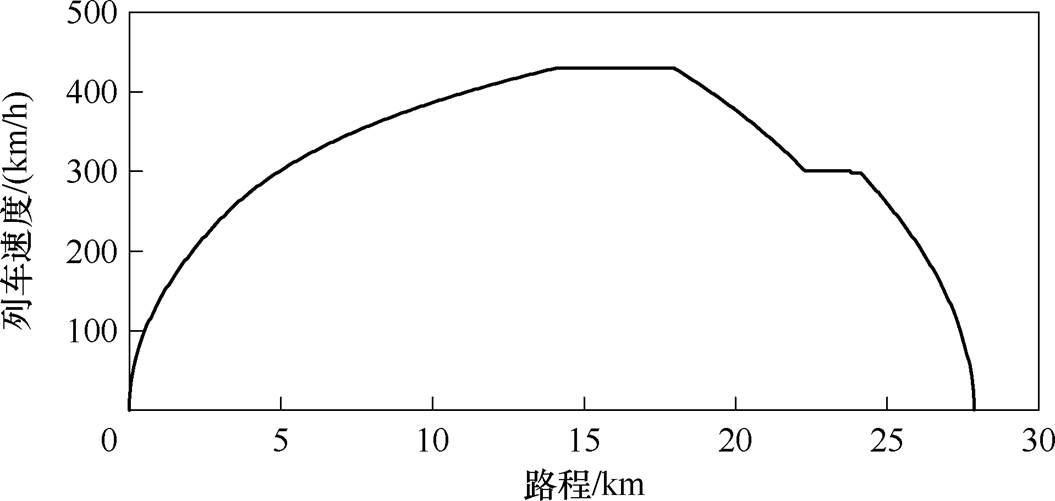
图12 上海高速磁浮列车实测路程-速度曲线
Fig.12 Measured distance-speed curve of Shanghai high-speed maglev
将实测数据代入常态运营工况下的优化模型,可知
 (29)
(29)
当电流分配策略为CES时,优化模型解析解为
 (30)
(30)
当电流分配策略为CLIS时,采用有界梯度下降法求解优化模型数值解为
 (31)
(31)
根据式(30)、式(31)可知,当采用CES策略时,基于运营工况将逆变器共址配置于一座牵引变电站(Operating Conditions Co-Located Confi- guration, OCCC),可使馈电网络损耗最小。此时,由于两台逆变器共址,CES与CLIS策略具有等效性。当采用CLIS策略时,基于运营工况将两台逆变器分别放置在相对于线路中点对称建造的两座牵引变电站(Operating Conditions Symmetric Configuration, OCSC),可使馈电网络损耗最小。
为验证常态运营工况下牵引变电站优化方法的有效性,本文选取了三种策略方案进行对比实验:上海磁浮现行应用的DEEC策略、本文提出的OCCC策略以及OCSC策略。不同策略下的列车运行速度曲线如图13所示。
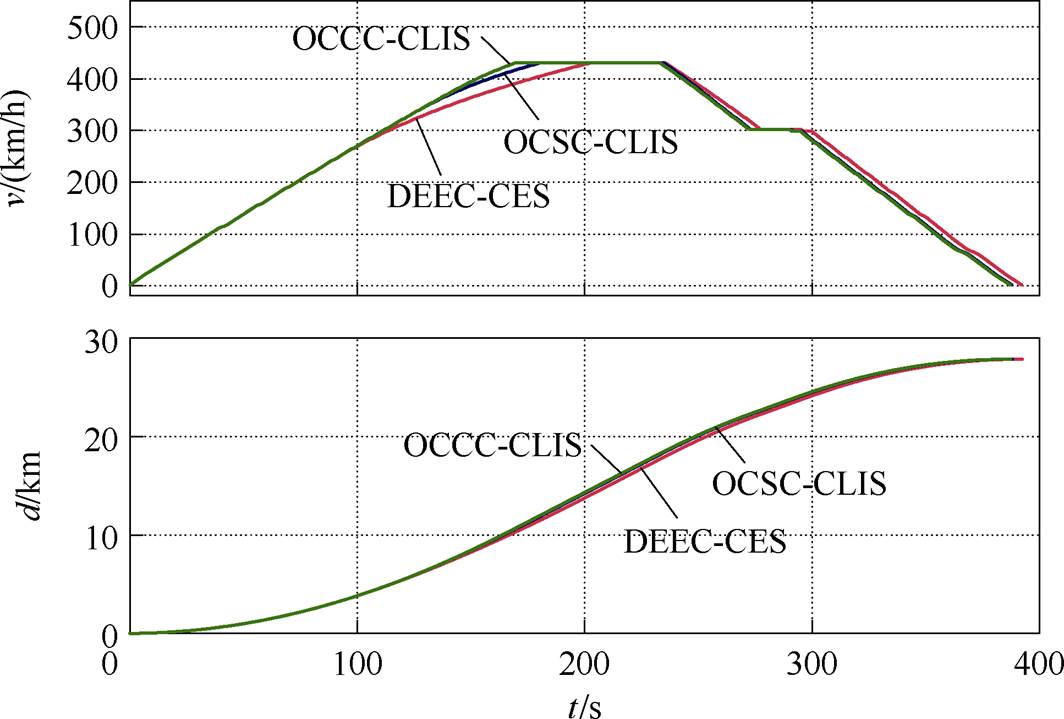
图13 常态运营工况下列车的速度和里程曲线
Fig.13 Speed and mileage curve of train under normal operation conditions
在高速实验工况下,采用DEEC-CES、OCCC- CES(CLIS)和OCSC-CLIS策略的实验结果如图14所示。由图14a可知,在DEEC-CES策略下两台逆变器输出电流呈现高度同步性,最大视在功率达15 MV·A且功率差值在4 MV·A范围内。当列车临近线路端部变电站时,因馈电线路阻抗参数差异引发显著阻抗失配现象,导致环流达620 A。此时馈电损耗功率呈现动态负载敏感特性:在加速段与减速段中呈先升后降态势,最大损耗2.8 MW出现在减速段,匀速段损耗功率维持在低值区间。由图14b可知,在OCCC-CES(CLIS)策略下,由于逆变器共址布局形成的对称负载结构,两台逆变器实现输出电流与视在功率的严格同步,最大视在功率为14 MV·A。CES与CLIS策略在此条件下呈现等效性,环流稳定维持零值。由于牵引逆变器共址部署在加速段末端,馈电网络损耗呈现阶段性波动特征:加速段与匀速段损耗功率均低于1 MW,而减速段因电缆长度增加导致损耗功率显著升高。由图14c可知,在OCSC-CLIS策略下,动态电流分配机制有效消除逆变器间环流,馈电网络最大损耗功率降至1.5 MW。然而,当列车临近变电站时,出现逆变器功率非均衡分配现象,最大视在功率为24 MV·A。
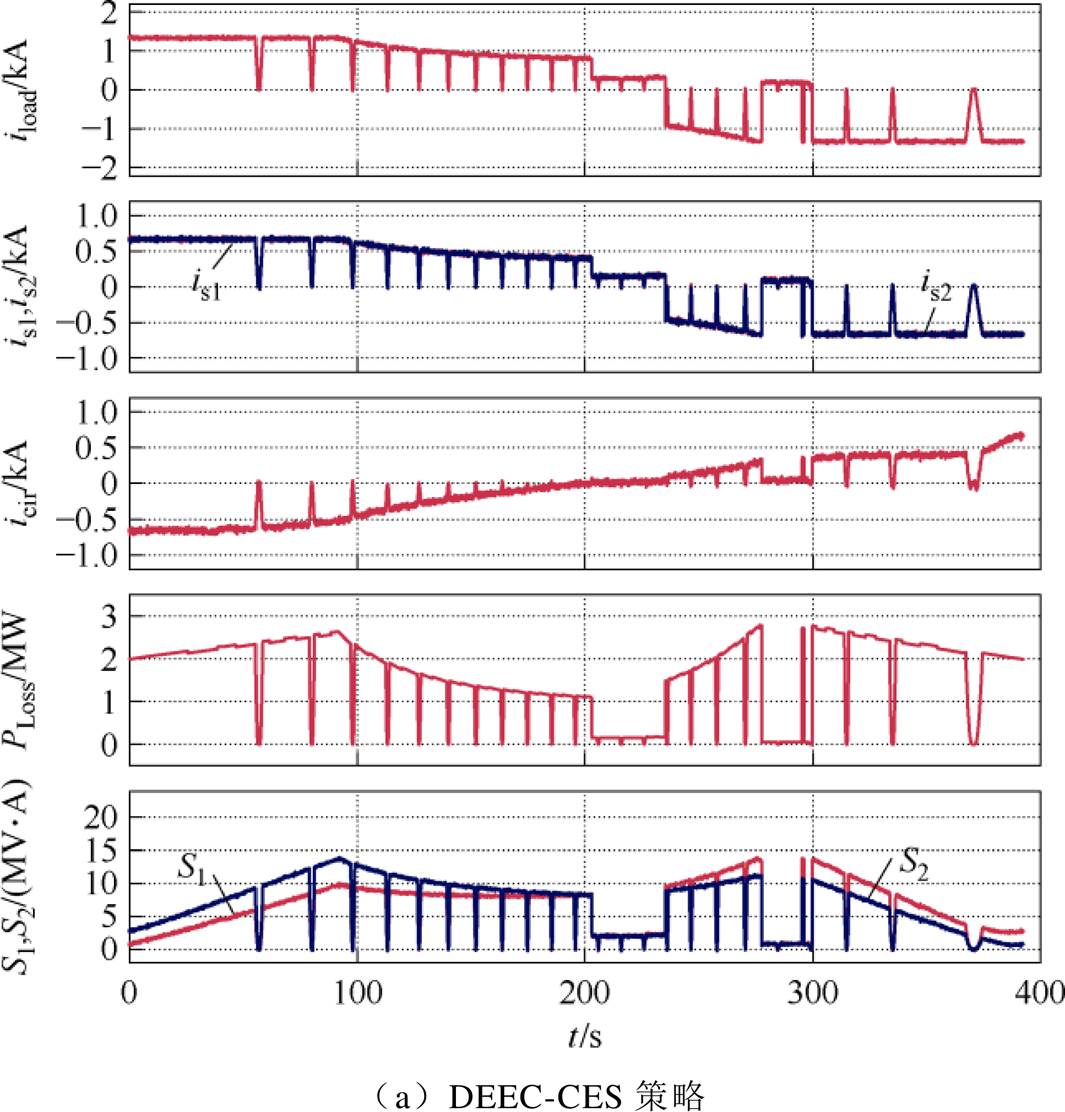
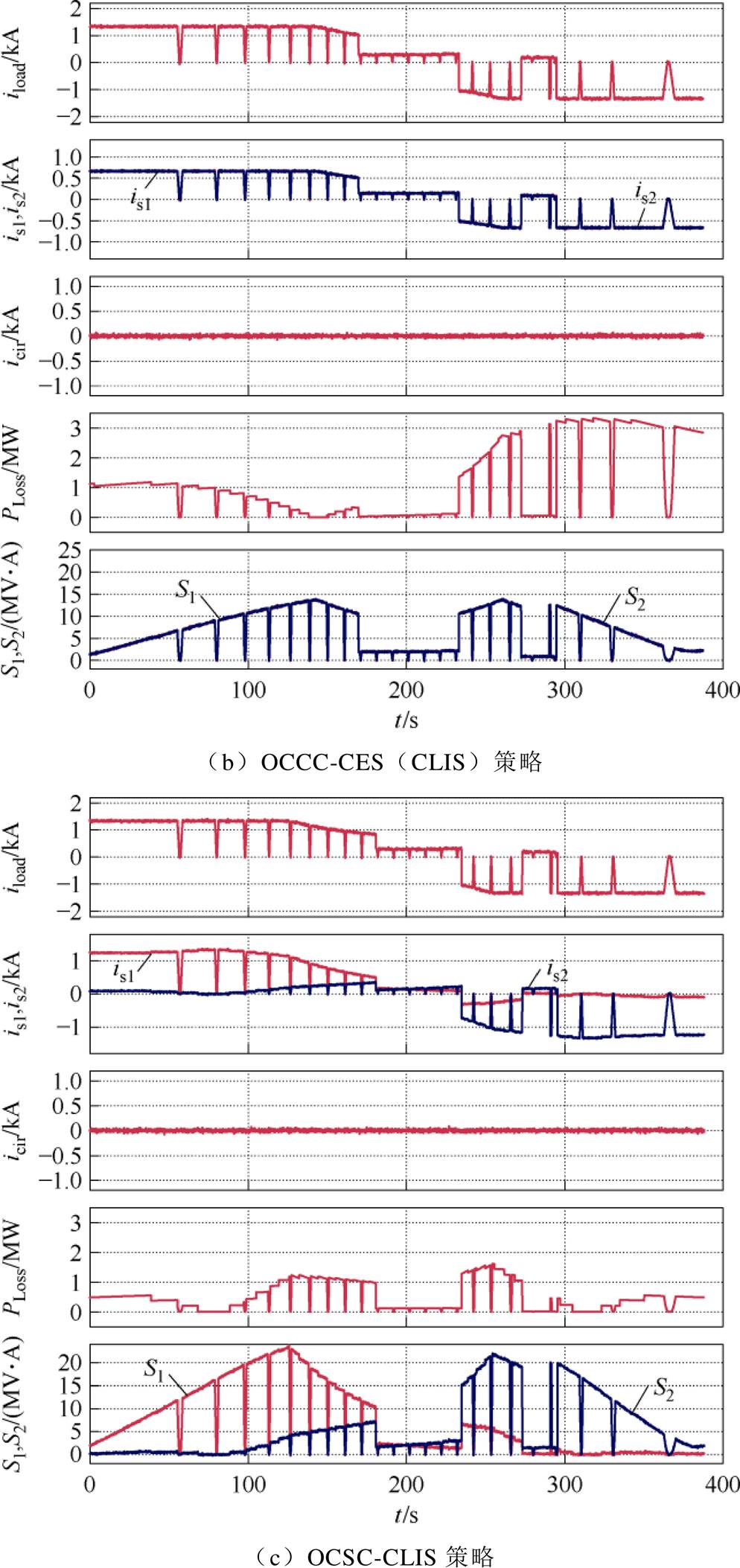
图14 常态运营工况下不同变电站布局的实验波形
Fig.14 Experimental waveforms of different substation layouts under normal operation conditions
常态运营工况下,不同优化策略的牵引供电系统能耗、效率与馈电网络损耗见表3。由表3可知,上海磁浮运营线现行DEEC-CES策略存在显著环流与能效瓶颈,其最大环流达620 A、馈电网络损耗高达178.39 kW·h。电流动态分配策略与牵引变电站布局可突破现有能效限制:本文提出的OCSC-CLIS策略实现全局最优馈电损耗52.36 kW·h,较DEEC- CES降低70.6%,牵引效率提升至88.3%,但需增加60%逆变器容量以满足动态分配需求;而OCCC布局方案虽馈电损耗较高,但牵引效率达90.3%为各方案最高,同时逆变器容量需求降低,且通过单变电站架构使基建成本降低50%。
表3 常态运营工况下不同优化策略的能耗与效率
Tab.3 Energy consumption and efficiency of different optimization strategies under normal operating conditions
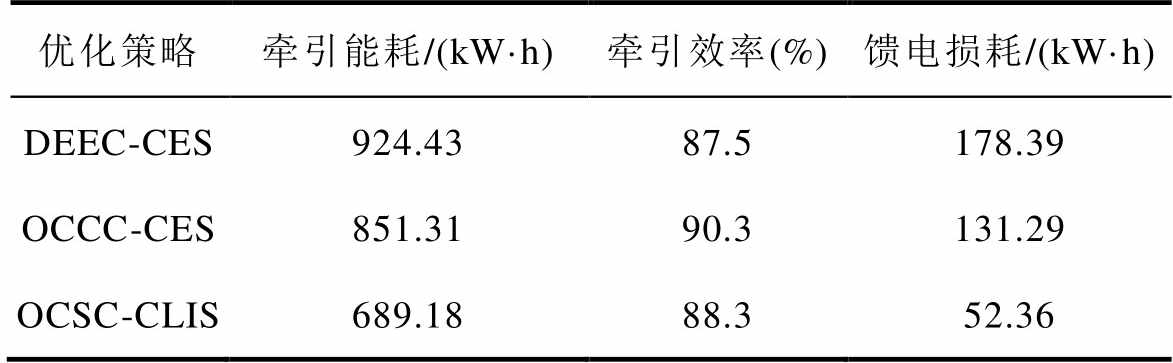
优化策略牵引能耗/(kW·h)牵引效率(%)馈电损耗/(kW·h) DEEC-CES924.4387.5178.39 OCCC-CES851.3190.3131.29 OCSC-CLIS689.1888.352.36
上述实验证明,本文提出的CLIS动态电流分配策略可成功消除环流并显著降低馈电损耗;牵引变电站布局优化策略进一步实现了牵引效率提升与损耗协同优化。
高速磁浮牵引供电系统在双端供电模式下,兼具电能长距离传输与逆变器并联供电的双重特性,导致馈电网络损耗显著及环流超标问题。为此,本文提出双维度优化策略:一方面通过动态电流分配策略抑制环流并降低馈电损耗;另一方面基于牵引变电站布局的顶层设计,协同优化系统能效和变电站建造数量,最终形成适配不同工况需求的差异化技术路径。通过理论分析和硬件在环实验验证,得出以下结论:
1)针对双端供电模式提出的CLIS策略,基于电流-电缆长度反比机制,可完全消除环流。实验表明,相同条件下CLIS策略馈电损耗仅为106.92 kW·h,较CES策略的213.84 kW·h显著降低50.3%。
2)对于高速实验工况,现行DEEC-CES方案馈电损耗213.84 kW·h,牵引效率75.8%。本文提出的DSOC-CLIS策略实现最低馈电损耗88.71 kW·h,牵引效率达81.5%;DMCC-CLIS策略馈电损耗131.85 kW·h,最高牵引效率84.4%。
3)对于常态运营工况,现行DEEC-CES方案馈电损耗178.39 kW·h,牵引效率87.5%。本文提出的OCSC-CLIS策略实现最低馈电损耗52.36 kW·h,牵引效率88.3%;OCCC-CLIS策略馈电损耗131.29 kW·h,最高牵引效率90.3%。
4)DSOC与OCSC策略在能效极值维度优势突出,但需建造两座牵引变电站且逆变器输出功率要求较高;而DMCC与OCCC策略依托逆变器功率均衡优化与单变电站集约部署,更具综合效益。
参考文献
[1] 陈冲, 贾利民, 赵天宇, 等. 去碳化导向的轨道交通与新能源融合发展——形态模式、解决方案和使/赋能技术[J]. 电工技术学报, 2023, 38(12): 3321- 3337.
Chen Chong, Jia Limin, Zhao Tianyu, et al. Decarbonization-oriented rail transportation and renewable energy integration development-configurations, solutions, and enabling/empowering technologies[J]. Transactions of China Electrotechnical Society, 2023, 38(12): 3321-3337.
[2] 熊嘉阳, 沈志云, 池茂儒, 等. 高速磁悬浮列车技术综述[J]. 交通运输工程学报, 2025, 25(2): 1-23.
Xiong Jiayang, Shen Zhiyun, Chi Maoru, et al. Review on high-speed maglev train technology[J]. Journal of Traffic and Transportation Engineering, 2025, 25(2): 1-23.
[3] 高信迈, 张志强, 郑景文. 高速磁浮系统能耗与效率分析[J]. 科技创新与应用, 2023, 13(6): 30-36.
Gao Xinmai, Zhang Zhiqiang, Zheng Jingwen. Energy consumption and efficiency analysis of high-speed maglev system[J]. Technology Innovation and Appli- cation, 2023, 13(6): 30-36.
[4] 曹学谦, 葛琼璇, 朱进权, 等. 基于积分滑模的高速磁悬浮列车牵引控制策略[J]. 电工技术学报, 2022, 37(14): 3598-3607.
Cao Xueqian, Ge Qiongxuan, Zhu Jinquan, et al. Traction-system research of high-speed maglev train based on integral sliding mode control[J]. Transa- ctions of China Electrotechnical Society, 2022, 37(14): 3598-3607.
[5] Zhang Peng, Wu Xuezhi, Lin Zhiheng, et al. Integration modulation for current ripple and high- frequency zero-sequence circulating current reduction on two-parallel three-level converters[J]. IEEE Transactions on Industrial Electronics, 2023, 71(8): 8216-8226.
[6] Porkia H A, Adabi J, Zare F. Reduction of zero- sequence and differential-mode circulating currents and common-mode voltage in parallel PWM con- verters[J]. IEEE Transactions on Industrial Elec- tronics, 2023, 70(4): 4038-4047.
[7] Jiang Dong, Shen Zewei, Wang Fei. Common-mode voltage reduction for paralleled inverters[J]. IEEE Transactions on Power Electronics, 2017, 33(5): 3961-3974.
[8] Cai Hui, Zhao Rongxiang, Yang Huan. Study on ideal operation status of parallel inverters[J]. IEEE Transa- ctions on Power Electronics, 2008, 23(6): 2964- 2969.
[9] 张敏, 陈宏舟, 樊瑞, 等. 三电平变流器模块化并联系统中点电位与零序环流机理建模与协调控制[J]. 电工技术学报, 2025, 40(18): 6014-6028.
Zhang Min, Chen Hongzhou, Fan Rui, et al. Modeling and coordinated control of neutral point potential and zero-sequence circulating current in modular parallel three-level converters[J]. Transactions of China Elec- trotechnical Society, 2025, 40(18): 6014-6028.
[10] 刘金鑫, 葛琼璇, 王晓新, 等. 高速磁浮牵引控制系统半实物实验研究[J]. 电工技术学报, 2015, 30(14): 497-503.
Liu Jinxin, Ge Qiongxuan, Wang Xiaoxin, et al. Hardware-in-loop research of traction-system for high-speed maglev[J]. Transactions of China Elec- trotechnical Society, 2015, 30(14): 497-503.
[11] 谭强. 高速磁浮列车双端供电技术研究[D]. 北京: 中国科学院电工研究所, 2018.
Tan Qiang. Technical research on double-end supply for high-speed maglev[D]. Beijing: Institute of Electrical Engineering, Chinese Academy of Sciences, 2018.
[12] 朱进权, 葛琼璇, 孙鹏琨, 等. 高速磁悬浮列车在双端供电模式下的电流控制策略[J]. 电工技术学报, 2021, 36(23): 4937-4947.
Zhu Jinquan, Ge Qiongxuan, Sun Pengkun, et al. Current control strategy for high-speed maglev in the dual feeding mode[J]. Transactions of China Elec- trotechnical Society, 2021, 36(23): 4937-4947.
[13] 葛琼璇, 张波, 韦榕, 等. 高速磁浮交通牵引供电与控制技术现状及展望[J]. 前瞻科技, 2023, 2(4): 89-95.
Ge Qiongxuan, Zhang Bo, Wei Rong, et al. Present situation and prospect of traction power supply and control technologies for highspeed maglev trans- portation[J]. Science and Technology Foresight, 2023, 2(4): 89-95.
[14] Sawada K. Outlook of the superconducting maglev[J]. Proceedings of the IEEE, 2009, 97(11): 1881-1885.
[15] 吴祥明. 高速磁浮上海示范线的建设[J]. 同济大学学报(自然科学版), 2002, 30(7): 814-818.
Wu Xiangming. Construction of Shanghai maglev demonstration line[J]. Journal of Tongji University, 2002, 30(7): 814-818.
[16] Okui A, Fukada S, Kaga S, et al. Constitution and characteristics of neutral point clamped type inverter for driving LSM[C]//Conference Record of the Power Conversion Conference-Yokohama 1993, Yokohama, Japan, 1993: 38-43.
[17] 朱进权, 葛琼璇, 张波, 等. 考虑悬浮系统影响的高速磁悬浮列车牵引控制策略[J]. 电工技术学报, 2022, 37(12): 3087-3096.
Zhu Jinquan, Ge Qiongxuan, Zhang Bo, et al. Traction control strategy of high-speed maglev con- sidering the influence of suspension system[J]. Transactions of China Electrotechnical Society, 2022, 37(12): 3087-3096.
[18] Cao Xueqian, Ge Qiongxuan, Zhu Jinquan, et al. Improved sliding mode traction control combined sliding mode disturbance observer strategy for high- speed maglev train[J]. IEEE Transactions on Power Electronics, 2023, 38(1): 827-838.
[19] 徐畅, 宫金武, 张国琴, 等. 中点钳位型三电平逆变器并联系统的零序环流抑制策略[J]. 电工技术学报, 2023, 38(增刊1): 124-135.
Xu Chang, Gong Jinwu, Zhang Guoqin, et al. Zero- sequence circulating current suppression strategy of neutral-point-clamped three-level inverter parallel system[J]. Transactions of China Electrotechnical Society, 2023, 38(S1): 124-135.
[20] 刘沁怡, 黄伟煌, 郭铸, 等. 基于自适应虚拟阻抗的多并联构网型变流器无功功率分配策略[J]. 电力系统自动化, 2024, 48(15): 122-130.
Liu Qinyi, Huang Weihuang, Guo Zhu, et al. Reactive power sharing strategy for multiple parallel grid- forming converters based on adaptive virtual impedance[J]. Automation of Electric Power Systems, 2024, 48(15): 122-130.
[21] 高瞻. 大功率三电平逆变器优化载波脉宽调制及容错技术研究[D]. 北京: 中国科学院电工研究所, 2021.
Gao Zhan. Research on optimized carrier based PWM strategies and fault tolerant techniques for high power three level inverter[D]. Beijing: Institute of Electrical Engineering, Chinese Academy of Sciences, 2021.
[22] Zhu Jinquan, Ge Qiongxuan, Sun Pengkun. Extended state observer-based sensorless control for high-speed maglev application in single-feeding mode and double-feeding mode[J]. IEEE Transactions on Trans- portation Electrification, 2022, 8(1): 1350-1361.
[23] 王立天, 李力鹏. 高速磁悬浮牵引供电系统[M]. 北京: 北京交通大学出版社, 2014.
Abstract High-speed maglev traction power supply systems feature a configuration where parallel inverters supply power to the segmented long-stator from both ends. As a result, circulating currents and feeding network losses adversely affect the energy efficiency of the traction system. While several solutions addressing circulating currents in parallel inverters have been proposed recently, existing research rarely analyzes or addresses this issue from the perspective of overall traction power supply system efficiency. This paper proposes a dual-dimensional collaborative optimization strategy that integrates dynamic current allocation with traction substation layout design. This approach suppresses circulating currents, reduces feeding network losses, and enhances traction efficiency for high-speed maglev traction power supply systems under both high-speed testing and normal operation scenarios.
Firstly, a collaborative optimization model is developed to suppress circulating currents and minimize feeding network losses simultaneously. A dynamic current allocation strategy is proposed based on the principle of inverse proportionality to cable length. This strategy ensures that the output currents of parallel inverters are dynamically adjusted according to the length of the connected feeding cables, thus achieving minimal circulating currents and reduced feeding losses. Secondly, the study introduces differentiated optimization designs for traction substation layouts to optimize feeding network losses, considering the constraints of inverter capacity and system topology. Hardware-in-the-loop (HIL) experimental results validate the effectiveness of the proposed strategies. The dynamic current allocation strategy successfully eliminates circulating currents between parallel inverters and reduces feeding network losses by up to 50.3%. Furthermore, the optimized traction substation layouts address unbalanced power distribution among inverters caused by current allocation adjustments. For high-speed testing conditions, the dual symmetric offset configuration (DSOC) strategy achieves the lowest feeding network loss of 88.71 kW·h and a traction efficiency of 81.5%. The dual midpoint co-located configuration (DMCC) strategy achieves a higher traction efficiency of 84.4% with a feeding loss of 131.85 kW·h. Still, it requires fewer traction substations, thereby reducing infrastructure complexity and cost. In normal operation conditions, the operating conditions symmetric configuration (OCSC) strategy achieves the lowest feeding loss of 52.36 kW·h and a traction efficiency of 88.3%. In comparison, the operating conditions co-located configuration (OCCC) strategy achieves the highest traction efficiency of 90.3% with a feeding loss of 131.29 kW·h. DSOC and OCSC strategies offer superior performance in minimizing feeding losses, but necessitate the construction of two traction substations and high inverter power capacities. Conversely, DMCC and OCCC strategies provide balanced power distribution and enable single-substation deployment, reducing construction costs and simplifying system architecture.
The dynamic current allocation strategy, grounded in the inverse proportionality principle, effectively balances the trade-off between feeding loss minimization and circulating current suppression. The differentiated substation layout designs provide scalable solutions for various operating scenarios, ensuring energy-efficient and cost-effective system operation. This paper offers valuable insights for the design and optimization of high-speed maglev traction power supply systems, contributing to the advancement of efficient and sustainable high-speed transportation.
keywords:High-speed maglev, double feed mode, feeding network, loss optimization
DOI: 10.19595/j.cnki.1000-6753.tces.250434
中图分类号:TM359.4
国家重点研发计划(2023YFB4302501-02)和国家自然科学基金(52302458)资助项目。
收稿日期 2025-03-20
改稿日期 2025-07-15
郑彦喜 男,1996年生,博士研究生,研究方向为磁浮交通牵引供电系统能效优化技术。E-mail: zhengyanxi@mail.iee.ac.cn
朱进权 男,1993年生,副研究员,研究方向为磁浮交通牵引供电及控制技术。E-mail: zhujinquan@mail.iee.ac.cn(通信作者)
(编辑 陈 诚)