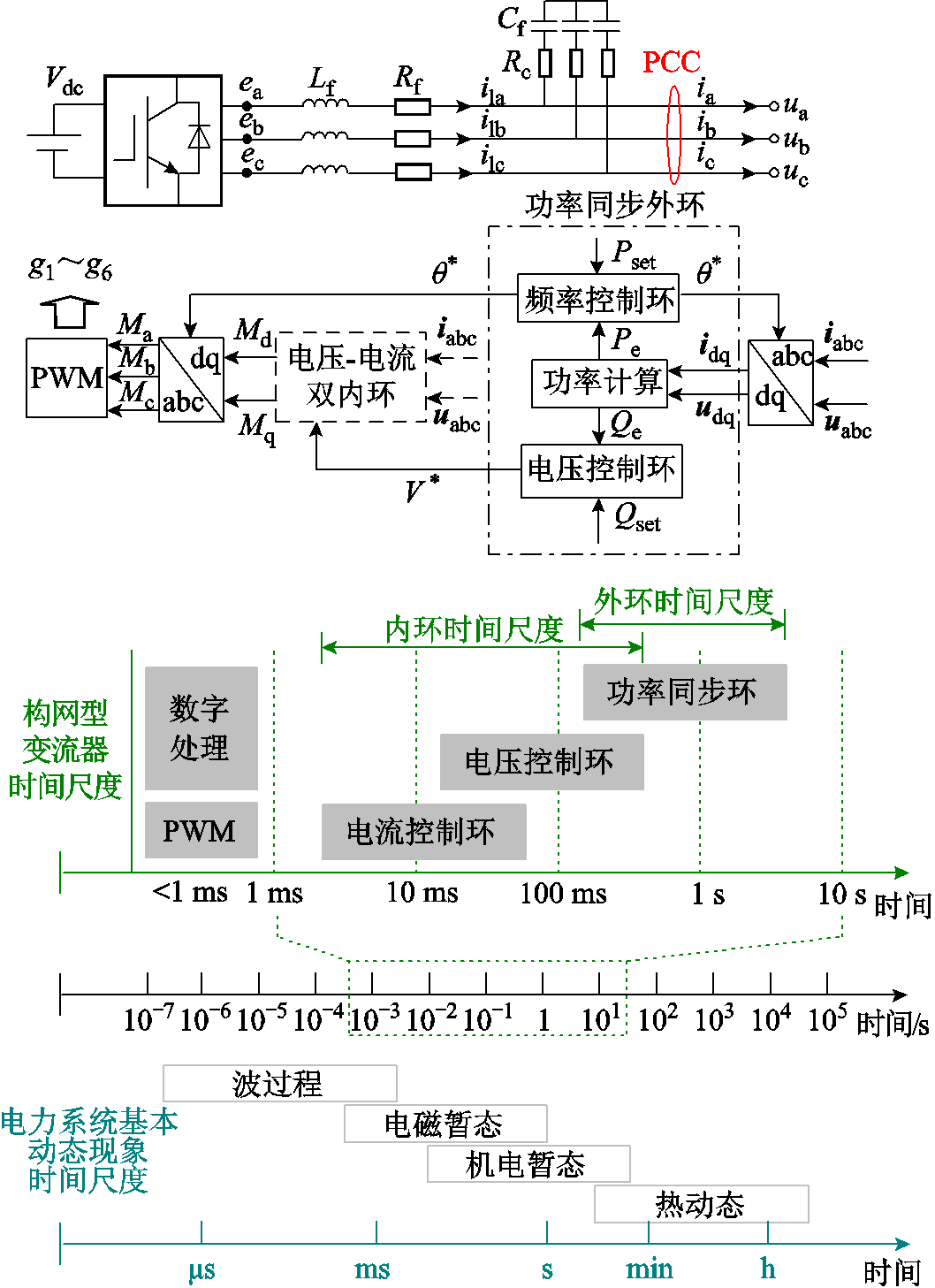
图1 GFM变流器控制结构及时间尺度
Fig.1 GFM control structure and time scale
摘要 构网型(GFM)变流器以自同步电压源的方式并网,是高比例新能源系统提供频率和电压支撑的关键设备,然而其多环控制环节耦合复杂,所处新能源场站的送出场景与电网条件多样,导致其并网稳定性分析与宽频振荡机理解析面临挑战。基于此,该文采用谐波线性化方法建立了基于调制信号传递函数的统一化序阻抗模型,并提出了基于调制信号解析式的多环控制解耦方法,明晰了频率外环、电压外环、电压-电流双内环对阻抗特性的独立贡献,深入剖析了不同控制拓扑的GFM变流器在不同强度交流电网及经串补送出场景下的振荡风险来源及影响因素。主要结论如下:外环主要影响近工频阻抗特性,一阶控制结构较二阶控制结构具有更优的振荡稳定性;无内环的GFM在强电网下的次同步振荡问题可通过优化控制结构或调整控制参数得到控制;双内环的引入使GFM在次/超同步频段呈容性,增加了强电网下的振荡风险,但在串补送出场景下能改善系统稳定性。
关键词:构网变流器 电压-电流双环控制 序阻抗建模 振荡稳定性 电网强度 串联补偿
随着“双碳”目标的提出,能源低碳转型加快推进,新能源占比逐渐提升,预计2030年我国新能源装机容量将突破28亿kW,占电源总装机的56%[1];至2060年新能源装机规模达67亿kW[2],占全国电源总装机规模比例超过80%。传统新能源发电采用锁相同步方式并网,不具备主动支撑能力,削弱了电网的交流同步机制[3]。随着高比例新能源电力的持续接入、电力电子设备的大量并网,电力系统呈现低惯量、强非线性、弱抗扰性等特性[4]。在此背景下,以构网型(Grid-Forming, GFM)为代表的自同步电力电子电源成为行业研究热点,构网型控制技术通过模拟同步机运行机制呈现自同步电压源特性,具备惯量/频率/电压主动支撑能力,能够改善系统的振荡特性,是维持电力系统交流同步机制、保障新型电力系统安全稳定运行的重要途径[5-6]。
构网型并网变流器摒弃传统锁相环,通过功率-频率自同步机制实现并网运行,对外呈现电压源特性,下垂控制、虚拟同步机(Virtual Synchronous Generator, VSG)控制是发展最早、最主流的构网型自同步控制策略。GFM变流器外环输出的电压幅值和相位可直接合成为三相电压参考值[7];为实现故障状态下的自然限流能力,内环亦可采用电压-电流双闭环的控制策略[8]。此外,还可以通过附加虚拟阻抗等方式提升连接强电网时的稳定性[9]。GFM变流器控制结构在经历双内环控制、虚拟阻抗等改进后已日趋完善,其应用范围从微电网逐步扩展至大电网[10],在未来具有广泛的应用前景。然而,GFM变流器的多环控制结构与多样化控制方式形成了宽频带等效阻抗,易与复杂的外部电网环境发生阻抗耦合,引发宽频振荡事故,各控制环节存在不同时间尺度且参数设定灵活,大大增加了振荡机理分析的复杂性[11]。
目前,针对宽频振荡问题主要的研究方法包括时域状态空间分析法和频域阻抗分析法两类[12]。随着系统规模扩大、电力电子装备控制特性趋于多样化,采用状态空间分析法会导致模型阶数急剧增大,面临计算“维数灾”等难题,难以适应新能源发电与电网动态相互作用的精准分析。与之相比,阻抗分析法具有物理意义清晰、适用范围广、易于测量的工程化优势,已经在高比例新能源电力系统宽频段振荡问题的研究领域中得到了广泛应用[13]。因此本文采用阻抗分析法,针对GFM变流器多环控制结构引发的复杂阻抗特性及其并网稳定性问题展开研究。
针对GFM变流器的振荡稳定性问题,国内外学者采用阻抗分析法展开了大量研究。对于单一控制环的作用机理,文献[14]对跟网型(Grid-following, GFL)并网变流器和GFM变流器不同频段阻抗特性进行了对比,重点探讨了同步环节在阻抗特性中的角色和作用;文献[15]研究了电压-电流双闭环对GFM控制型永磁同步风电机组次同步振荡的影响特性,并提出了引入附加阻尼支路的振荡抑制策略;文献[16]针对功率同步型双馈风机,对比了锁相同步与功率同步型双馈风电机组的阻抗特性差异,并分析了功率环和电压环参数对系统相位裕度的影响;文献[17]对比了无内环/双内环结构GFM变流器的阻抗特性曲线,针对加入双内环造成的低频相位裕度不足的问题,提出引入虚拟阻抗的方法提高变流器并网稳定性。然而,GFM变流器各控制环存在耦合,现有建模方法难以实现多环控制解耦,从而难以量化电压、频率环的独立贡献,以及电压-电流双内环引入的作用机理。
另一方面,面对复杂的新能源外送场景(不同强度电网、经串补线路送出、柔直并网等),现有文献多基于特定控制拓扑进行单一场景下的振荡稳定性分析,例如:文献[18]针对VSG控制的无内环GFM变流器并网系统,基于阻抗分析法指出GFM设备的感性阻抗在低频区容易与串联补偿网络耦合,导致次同步振荡的发生;文献[19]针对VSG控制的模块化多电平GFM变流器,研究其在强电网下次/超同步振荡机理。然而,GFM变流器可采用多种控制结构且动态特性差异较大,针对单一拓扑结构的阻抗特性分析难以全面解析GFM变流器的并网振荡特性,更缺乏多种送出条件下振荡风险来源的对比与归因。
可见针对GFM变流器的振荡稳定性问题,国内外学者已进行了大量颇有价值的研究,但目前仍存在控制拓扑复杂与解耦困难、多场景交互差异与适配性解析两大难题。因此,本文主要工作如下:首先,基于谐波线性化方法推导了基于调制信号传递函数的统一化序阻抗模型,并通过阻抗扫频验证了所建模型的准确性,将不同控制拓扑下GFM变流器的序阻抗模型进行对比,明确了频率外环、电压外环、电压-电流双内环等环节对阻抗特性的主要影响频段;其次,分析了不同强度的交流电网、不同串补度送出场景下,GFM变流器与电网阻抗的交互特性与振荡风险,并通过仿真验证了理论分析的正确性;最后,通过基于调制信号解析式的阻抗分解法将电压环、频率环的作用解耦,剖析了不同外环控制方式对阻抗特性的影响机理、关键参数作用,并解析了内环引入的作用机理。
GFM变流器的控制结构框图及对应时间尺度如图1所示。交流侧通过LC滤波器连接到电网,考虑到工程测量点的实际需求,本文建立包含LC滤波器的序阻抗模型,将公共连接点(Point of Common Coupling, PCC)作为阻抗测量点。
图1 GFM变流器控制结构及时间尺度
Fig.1 GFM control structure and time scale
采集PCC的电压、电流后,一方面经Park变换馈入内环;另一方面经功率计算输入控制外环,生成参考电压幅值和相位后馈入内环。内环可将外环馈入信号直接合成三相调制信号;亦可经过电压-电流双内环输出调制信号dq轴分量 ,再经Park反变换转换为三相调制信号。其中,Lf和Rf分别为滤波器的等效电感和阻尼电阻,Cf和Rc分别为滤波器的等效电容和寄生电阻,Lg和Rg分别为等值电网的电感和电阻。直流侧用恒定电压源代替,Vdc为直流侧电压。ilabc为滤波电感三相电流,uabc和iabc分别为三相并网点(采样点)电压和电流,eabc为变流器三相内电动势,Pe和Qe分别为变流器输出的有功功率和无功功率,θ为变流器调制电压的相位;V*为调制电压幅值,
,再经Park反变换转换为三相调制信号。其中,Lf和Rf分别为滤波器的等效电感和阻尼电阻,Cf和Rc分别为滤波器的等效电容和寄生电阻,Lg和Rg分别为等值电网的电感和电阻。直流侧用恒定电压源代替,Vdc为直流侧电压。ilabc为滤波电感三相电流,uabc和iabc分别为三相并网点(采样点)电压和电流,eabc为变流器三相内电动势,Pe和Qe分别为变流器输出的有功功率和无功功率,θ为变流器调制电压的相位;V*为调制电压幅值,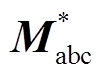 为abc三相电压调制信号,
为abc三相电压调制信号, 为三相调制信号dq轴分量。
为三相调制信号dq轴分量。
就时间尺度而言,GFM变流器内部的动态响应时间尺度分布于ms~s级之间。对于控制内环,在参数设计时,常取电压内环的带宽为电流内环带宽的1/50左右[10],因此电流控制内环的响应快于电压控制内环,整体在数十ms级;功率同步外环包括频率环与电压环,其响应速度慢于内环,在s级,同时间尺度下的控制易发生动态交互作用[13]。目前对于变流器控制的研究主要集中于电磁暂态与机电暂态时间尺度,其中,电流控制环、电压控制环与功率同步环的时间尺度最具代表性,也是本文关注的三个控制环节。直流侧用恒定电压源代替,该假设适用于前端具备快速、稳定能量支撑的场景,如风机、光伏与并网逆变器之间经过容值较大的直流电容相连接,使得直流母线电压在数十ms级时间尺度内的波动可被忽略的场景。
GFM变流器的频率控制环主要包括有功下垂控制与VSG控制两种典型结构。有功下垂控制通过引入有功功率-频率下垂特性实现频率调节,结构简单、响应迅速;VSG控制则通过模拟转子运动方程引入虚拟惯量J和阻尼Dp,使GFM变流器具备类似同步机的惯性响应与阻尼特性,有助于提升系统的频率稳定性。对于电压控制环,二阶控制结构可采用的具体控制方式更为多样,本文选取带积分器的下垂控制(后文简称“积分下垂”)。作为电压环经典二阶控制结构[20-22],其特点是将机端无功功率 与机端电压幅值U用下垂方程描述后送进积分器,这样可以保证和U在稳态时维持在下垂曲线上。相较于下垂控制,积分下垂控制可以更加精准地塑造机端的Q-U下垂特性。其中,下垂控制为一阶控制结构,VSG控制与积分下垂控制为二阶控制结构。
与机端电压幅值U用下垂方程描述后送进积分器,这样可以保证和U在稳态时维持在下垂曲线上。相较于下垂控制,积分下垂控制可以更加精准地塑造机端的Q-U下垂特性。其中,下垂控制为一阶控制结构,VSG控制与积分下垂控制为二阶控制结构。
GFM变流器控制内环可采用电压-电流双内环控制(后文称“双内环”)或外环信号直接合成的两种控制方式。内、外环典型控制结构框图如图2所示。图2中,Pset、Qset及ωset分别为有功功率、无功功率及频率参考值;Mp、Mq分别为有功、无功下垂系数;Dp、Dq分别为有功功率、电压偏差反馈系数;J为惯性系数;K为无功-电压系数;Em为电压环输出电压幅值参考值;Gv(s)为电压内环PI环增益;Gi(s)为电流内环PI环增益;电压内环输入Vdref= 、Vqref=0。
、Vqref=0。
在三相交流系统中,某一频率处的正序分量可以解释为负频率处的负序分量,并具有共轭性,因此正序阻抗Zp(s)与负序阻抗Zn(s)存在以下关系:Zp(s)= (-s)[22]。利用阻抗分析法分析稳定性时,正、负序阻抗均需要满足奈奎斯特稳定性判据,然而由于一般情况下负序阻抗不含有容性负阻尼区间,因此仅需对正序阻抗做重点研究。下文的推导以注入正序谐波信号为例,推导GFM变流器的正序阻抗模型。
(-s)[22]。利用阻抗分析法分析稳定性时,正、负序阻抗均需要满足奈奎斯特稳定性判据,然而由于一般情况下负序阻抗不含有容性负阻尼区间,因此仅需对正序阻抗做重点研究。下文的推导以注入正序谐波信号为例,推导GFM变流器的正序阻抗模型。
在PCC注入频率为fp的正序电压谐波信号,a相并网点电压va、电流ia时域表达式为
图2 GFM变流器内外环控制结构
Fig.2 Inner and outer loop control structure of GFM
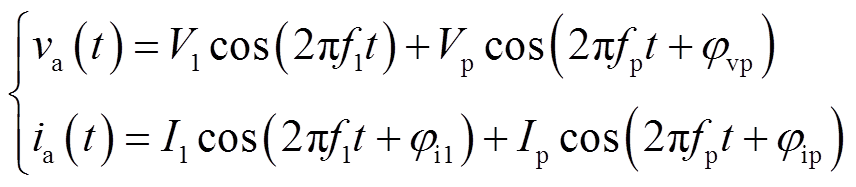 (1)
(1)
式中,V1、Vp分别为基频分量、正序小扰动分量的电压峰值;I1、Ip分别为基频分量、正序小扰动分量的电流峰值;f1、fp分别为基波频率、正序扰动频率;φvp为正负序电压扰动初相角;φi1、φip分别为基频电流、正负序电流扰动初相角。
va(t)、ia(t)的频域表达式Va(s)、Ia(s)分别为
 (2)
(2)
 (3)
(3)
式中,V1=V1/2;Vp=(Vp/2)ejφvp;I1=(I1/2)ejφi1;Ip=(Ip/2)ejφip。
设从谐波信号的输入开始走完控制结构的完整通路,得到调制小信号Ma(s)关于Vp、Ip的表达式为
 (4)
(4)
式中,A(s)、B(s)分别为Ma(s)关于Ip和Vp的传递函数。
变流器内电动势为
 (5)
(5)
式中,Kpwm为调制比。
根据图1所示主电路结构,a相主电路频域核心方程为
 (6)
(6)
式中,Ea(s)、Va(s)、Ia(s)、Ila(s)分别为ea、ua、ia、ila的频域值;s=j2πf。
将式(5)代入式(6),即可得到系统的正序阻抗表达式为
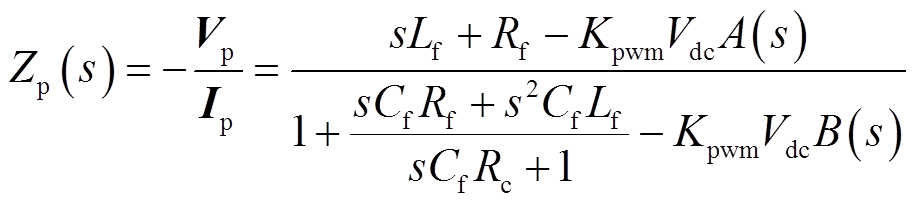 (7)
(7)
若考虑采样延时与PWM延时则式(7)可更新为
式中,H(s)=e-Tss(1-e-Tss),Ts为控制周期,Ts=1/fs,fs为采样频率。
值得注意的是,PCC处注入频率为fp的正序电压谐波分量时,除了会激发出fp的正序扰动分量外,还会产生fp-2f1的负序耦合分量,这是由于变流器控制系统的dq控制结构不对称导致的固有振荡特征。
主电路核心方程确定时,不同控制策略主要影响变流器三相桥臂调制信号 。因此,序阻抗建模的关键是得到不同控制方式下的传递函数A(s)与B(s)。
。因此,序阻抗建模的关键是得到不同控制方式下的传递函数A(s)与B(s)。
本节采用谐波线性化方法,在频域中推导GFM变流器的序阻抗模型。按照内外环控制方式不同,本文搭建了四个典型控制结构的阻抗模型,见表1。通过对比模型1、2可分析外环频率控制方式对阻抗特性的影响;对比模型2、3可分析内环控制方式对阻抗特性的影响;对比模型2、4可分析外环电压控制方式对阻抗特性的影响。
表1 所选典型控制结构
Tab.1 Typical control structure selected

模型调制小信号电压环频率环内环 1ΔMa1(s)积分下垂有功下垂无内环 2ΔMa2(s)积分下垂VSG无内环 3ΔMa3(s)积分下垂VSG双内环 4ΔMa4(s)无功下垂VSG无内环
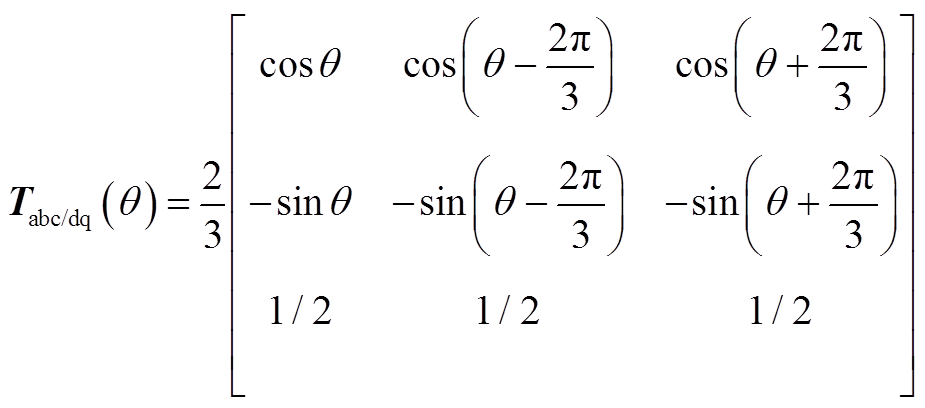
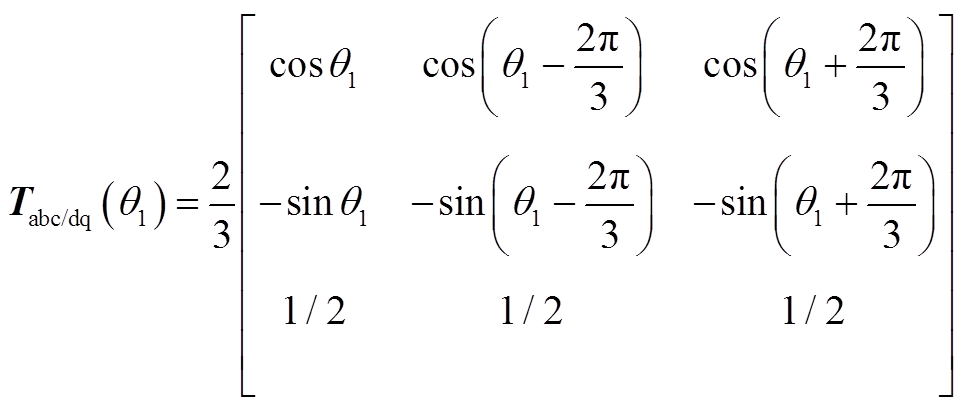
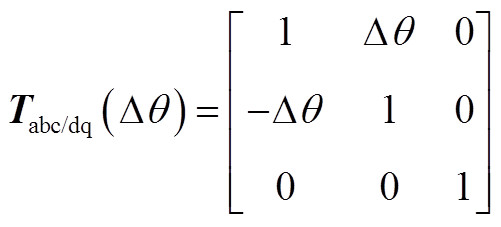
在静止坐标系下,三相电压和电流是正弦交流量,具有时变特性,不便于应用传统PI控制器进行控制,因此,通常通过Park变换将电压、电流转换到dq坐标系下进行控制。将Park变换矩阵线性化可得Tabc/dq(θ)≈Tabc/dq(θ1)Tabc/dq(Δθ),Tabc/dq(θ1)、Tabc/dq(Δθ)分别为基频分量、扰动量部分对应变换矩阵。其中,θ1=2f1,Δθ为谐波小信号带来的相位小扰动。Vabc(s)、Idq(s)经过Tabc/dq(θ1)转换为不考虑相位小扰动的dq轴信号Vdq1(s)、Idq1(s);Vdq1(s)与Idq1(s)再经Tabc/dq(Δθ)转换即可得到考虑完整相位的dq域下的电压分量、电流分量Vdq(s)、Idq(s)。Tabc/dq(θ)、Tabc/dq(θ1)及Tabc/dq(Δθ)表达式如附录中式(A1)~式(A3)所示。以电压信号为例,结合三角变换积化和差公式,uabc(t)转换到dq域的基频分量udq_0(t)时域推导过程如式(A4)所示,正、负序谐波分量及电流信号同理。
可见,基频分量经过Park变换转换为直流分量,获得了稳态工作点;正序谐波分量经过Park变换,fp+f1频次谐波分量三相抵消;负序三相扰动经过Park变换,fn-f1频次谐波分量三相抵消。即通过Park变换正序小信号产生了fp-f1的频率偏移,负序小信号产生了fn+f1的频率偏移。
Vabc(s)、Iabc(s)经过Tabc/dq(θ1)可得到不考虑相位小扰动时,电压、电流在dq轴的分量,有
 (8)
(8)
 (9)
(9)
根据瞬时功率理论,输出功率为
 (10)
(10)
将式(8)、式(9)代入式(10),忽略二阶以上小扰动项,根据频域卷积定理得有功、无功功率频域表达式为
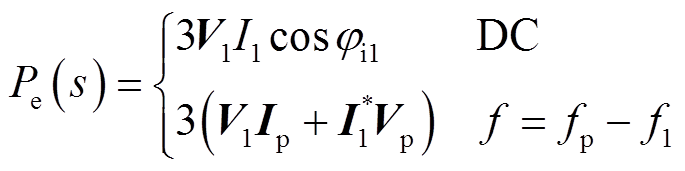 (11)
(11)
 (12)
(12)
式中,I1*为I1的共轭,I1=(I1/2)ejφvir;对于GFM并网系统, 为虚拟功角,=arcsin(ω1LfPe/EmV1),Em为滤波器内电动势;V1为并网点电压。
为虚拟功角,=arcsin(ω1LfPe/EmV1),Em为滤波器内电动势;V1为并网点电压。
2.2.1 控制外环建模
频率环采用有功下垂控制时,相位表达式为
 (13)
(13)
频率环采用VSG控制时,相位表达式为
 (14)
(14)
将式(11)分别代入式(13)、式(14),可得有功下垂、VSG控制下相位小扰动的频域表达式为
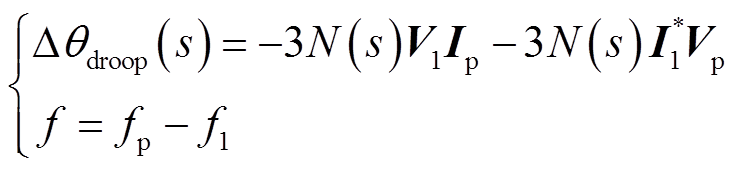 (15)
(15)
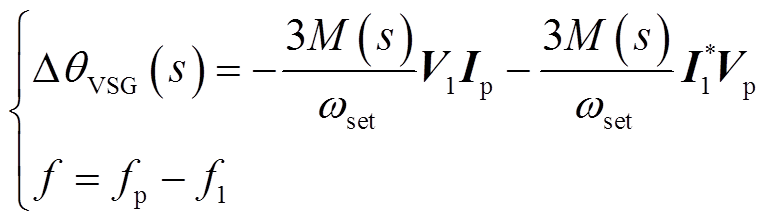 (16)
(16)
其中
M(s)=1/[s(Js+Dp)] N(s)=-Mp/s
电压环采用无功下垂控制时,调制电压幅值表达式为
 (17)
(17)
电压控制环采用积分下垂控制时,调制电压幅值表达式为
 (18)
(18)
将式(12)分别代入式(17)、式(18),得到无功下垂、积分下垂控制下调制电压幅值小扰动的频域表达式为
 (19)
(19)
 (20)
(20)
其中
K(s)=Dq/(Ks) T(s)=1/(Ks)
2.2.2 控制内环建模与调制小信号推导
对于无内环结构(模型1、模型2及模型4),频率环和电压环的输出直接合成调制波,此时a相调制信号Ma(s)为
 (21)
(21)
谐波线性化,得
 (22)
(22)
式中,ΔMa(s)为Ma(s)的谐波分量,注入正序小扰动时s=j2(fp-f1),注入负序小扰动时s=j2(fn+f1);Em0为调制电压幅值的基频分量;θ1=2f1。后文谐波分量同理,不再赘述。
将式(15)、式(16)、式(19)、式(20)代入式(22)即可得无内环的GFM变流器模型的调制小信号ΔMa1(s)、ΔMa2(s)、ΔMa4(s),详见附录式(A5)~式(A7)。将各调制小信号表达式中传递函数A(s)和B(s)代入式(7)即可得到无内环GFM并网系统(模型1、2、4)正序阻抗。
对于电压-电流双内环结构GFM变流器(模型3),内环对电压及电流进行调控,考虑相位小扰动,电压dq完整Park变换为
 (23)
(23)
将式(8)代入式(23)得Vdq(s)如式(24)、式(25)所示,电流信号Idq(s)同理,如附录式(A8)、式(A9)所示。
 (24)
(24)
 (25)
(25)
Vdq(s)经电压内环得到dq轴电流参考值Idqref(s)为
 (26)
(26)
Idref(s)、Iqref(s)馈入电流内环,经电流反馈控制得到dq轴调制信号Mdq(s)为
 (27)
(27)
式中,Gi(s)=kPi+kIi/s;Gv(s)=kPv。
将式(27)谐波线性化得
 (28)
(28)
 (29)
(29)
式中,ΔIdq(s)为Idq(s)的谐波分量;Idq0(s)为Idq(s)的基频分量;ΔMdq(s)为Mdq(s)的谐波分量;Mdq0(s)为Mdq(s)的基频分量。将式(A8)、式(A9)、式(24)、式(25)代入得到Mdq(s)的具体表达式如附录式(A10)所示。
将调制波dq轴分量Mdq(s)经反Park变换转换到abc坐标系,得到双内环控制结构下a相调制信号为
 (30)
(30)
将式(30)谐波线性化得

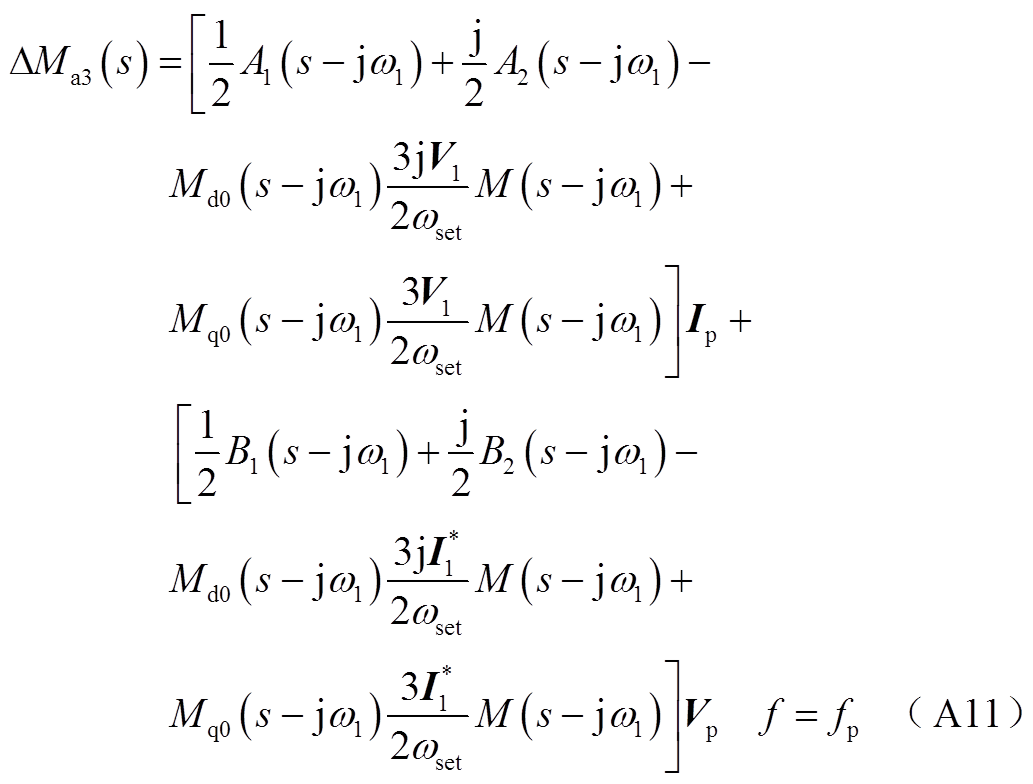
将式(A10)、式(16)代入式(31)即可得到模型3的调制小信号ΔMa3(s),详见附录式(A11)。将ΔMa3(s)表达式中传递函数A(s)和B(s)代入式(7)即可得到双内环的GFM变流器(模型3)并网系统阻抗。
为验证所建GFM变流器阻抗模型的正确性,基于Matlab/Simulink电磁暂态仿真平台搭建变流器并网系统仿真模型。系统仿真参数见附表1。
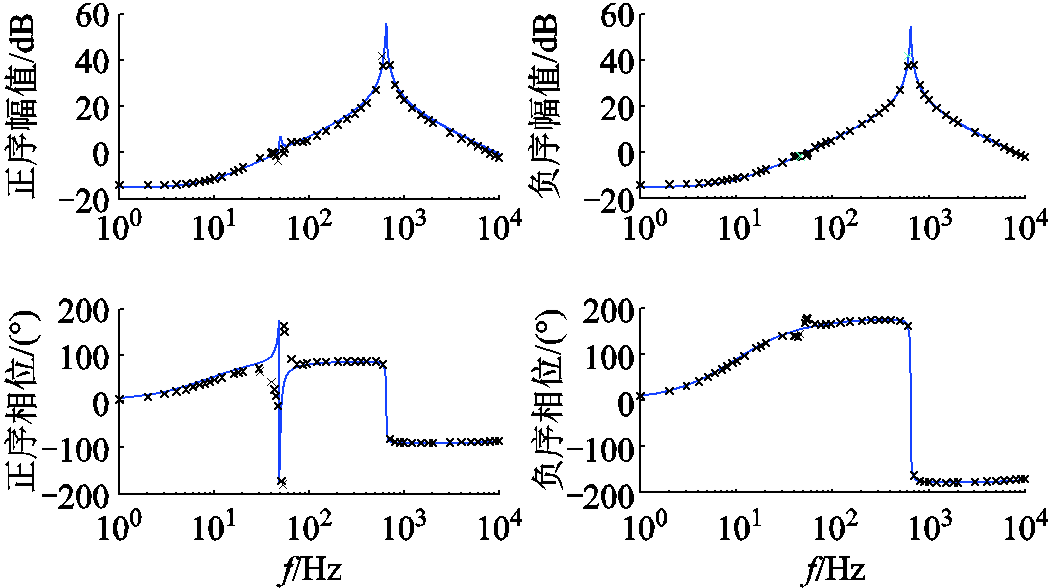
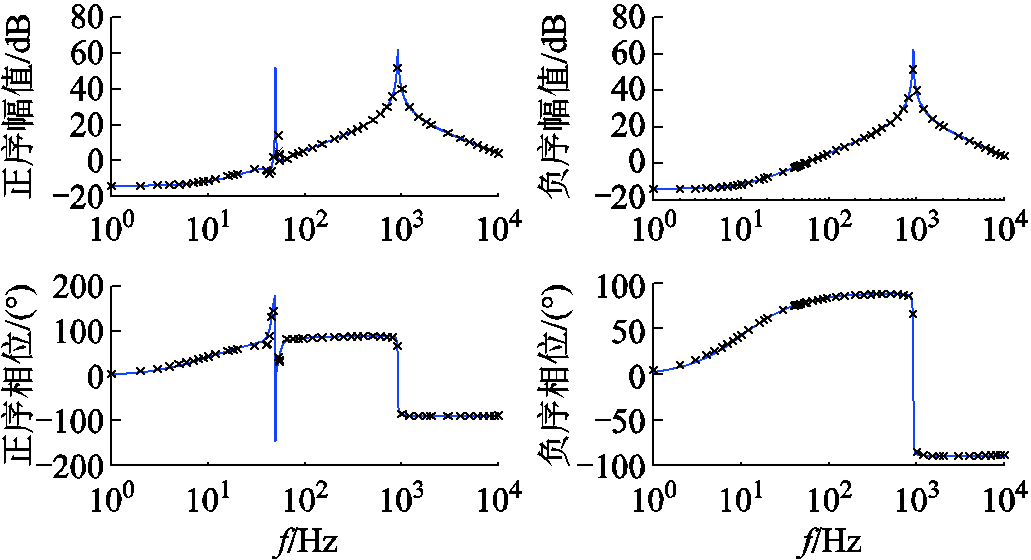
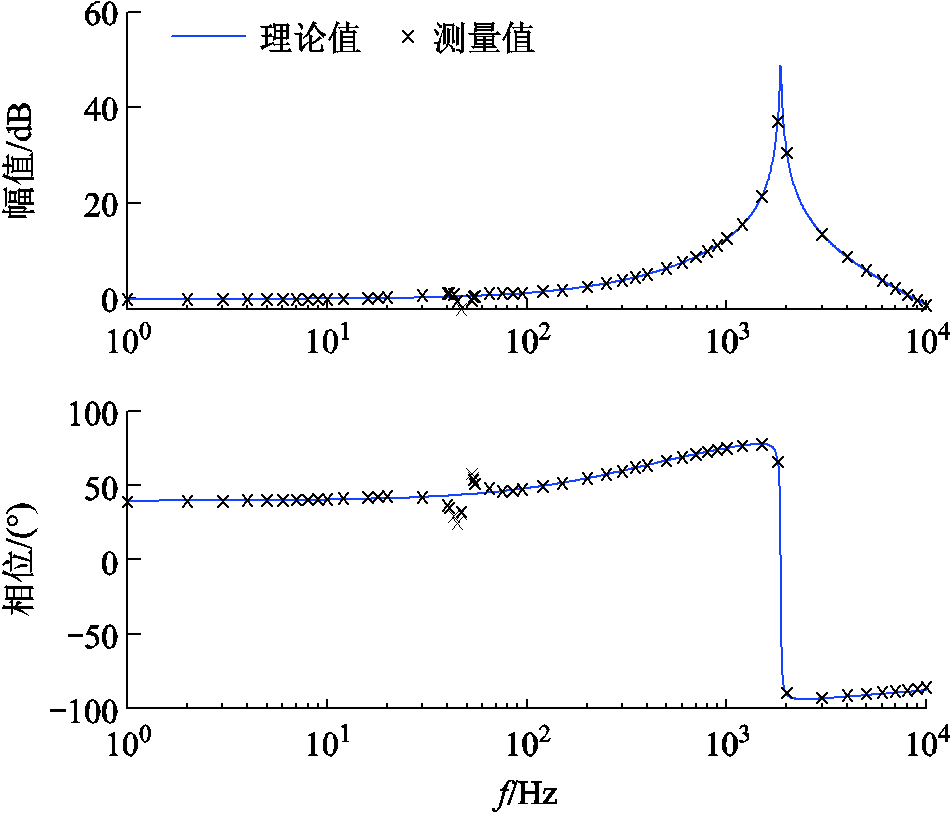
双内环控制的GFM变流器(模型3)正序阻抗理论计算与测量值对比如图3所示。当采样频率fs设置为105 Hz时,高频段理论值与实测值之间存在相频误差,而当fs设置为106 Hz时两者一致,可见采样频率的取值会影响中高频段的扫频精度,此误差来自于延时环节带来的相位滞后效应。因此在进行kHz的高频阻抗建模时,必须充分考虑实际控制系统的采样频率与延时效应。模型1、2、4的正序阻抗理论计算与测量值对比如附图1~附图3所示,模型3的负序阻抗理论计算与测量值对比如附图4所示。建模理论解析结果与仿真扫频结果基本一致,能够验证所建阻抗模型的正确性。
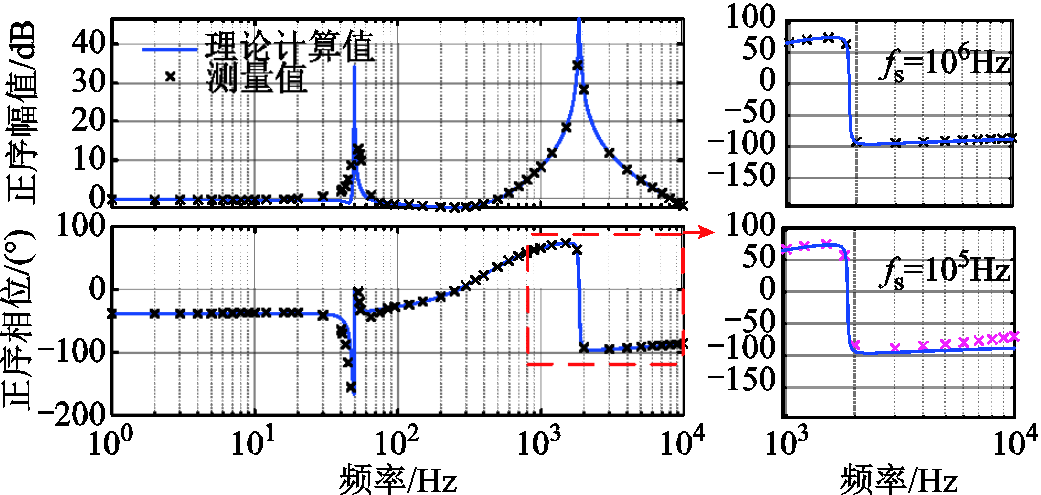
图3 模型3正序阻抗理论值与测量值对比
Fig.3 Comparison of theoretical and measured positive-sequence impedance for Model 3
在相同滤波器结构与电网条件下,上述四个模型:模型1(积分下垂,有功下垂,无内环),模型2(积分下垂,VSG,无内环),模型3(积分下垂,VSG,双内环),模型4(无功下垂,VSG,无内环)正序阻抗对比如图4所示。
根据图4初步可见,双内环控制结构对低频容性、高频谐振峰位置具备决定性影响。从阻抗幅值特性来看,200 Hz以下的频段,双内环控制的GFM变流器幅频特性曲线变化很小,1~50 Hz的次同步频段,无内环结构的GFM变流器阻抗幅值低于双内环结构,50~100 Hz的超同步频段,无内环结构的GFM变流器阻抗幅值则高于双内环结构;100 Hz以上的中高频段阻抗特性主要受滤波器结构影响,谐振频率 ,双内环模型的高频谐振峰后移,因此双内环的引入相当于在等效电路中引入“负电感”。从正序阻抗相频特性来看,50 Hz附近的近工频频段无内环的GFM变流器与双内环的GFM变流器均存在负阻尼区,且双内环控制结构下,在宽频率范围内更接近负阻尼区;无内环结构GFM变流器在次/超同步频段呈感性(相位>0°),而电网一般呈现“正电阻+感性”特性,因此无内环结构的GFM变流器不易于与电网构成二阶阻尼振荡电路;而双内环结构的GFM变流器在次/超同步频段呈容性(相位<0°),可能存在振荡风险。GFM变流器的外环结构(频率环与电压环)的影响相对较小,主要体现在工频附近阻抗特性,将在第3节中详细阐述。
,双内环模型的高频谐振峰后移,因此双内环的引入相当于在等效电路中引入“负电感”。从正序阻抗相频特性来看,50 Hz附近的近工频频段无内环的GFM变流器与双内环的GFM变流器均存在负阻尼区,且双内环控制结构下,在宽频率范围内更接近负阻尼区;无内环结构GFM变流器在次/超同步频段呈感性(相位>0°),而电网一般呈现“正电阻+感性”特性,因此无内环结构的GFM变流器不易于与电网构成二阶阻尼振荡电路;而双内环结构的GFM变流器在次/超同步频段呈容性(相位<0°),可能存在振荡风险。GFM变流器的外环结构(频率环与电压环)的影响相对较小,主要体现在工频附近阻抗特性,将在第3节中详细阐述。
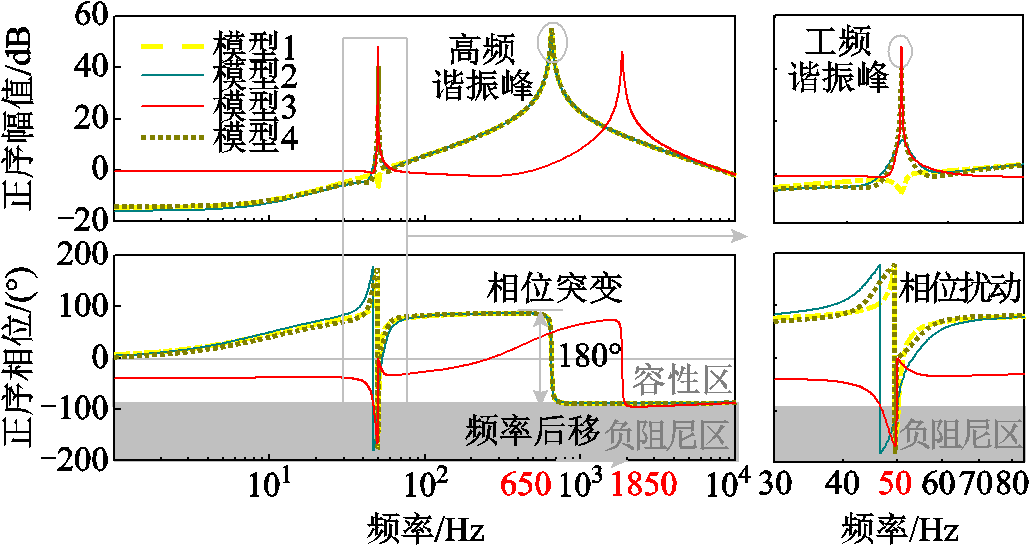
图4 正序阻抗特性对比
Fig.4 Comparison of positive sequence impedance characteristics
系统短路比(Short Circuit Ratio, SCR)可用来表征新能源电站并网点的电网强弱。GFM变流器具备弱电网稳定性[23],GFM变流器的应用可将并网点短路比技术边界下探至1.2[24]。参考我国构网型示范工程与相关研究文献,设置弱电网、中等强度电网和强电网,SCR分别取为1.2、2.5和10.0,分析GFM变流器并入不同强度交流电网时的稳定性,电网采用等值阻抗串联电压源的形式,除SCR不同外,电网结构相同。由阻抗稳定性准则可知,变流器并网时,当电网阻抗与变流器输出阻抗的幅频曲线交截点处的相位裕度PM(s)=180°-|∠Zg(s)- ∠ZGFM(s)|>0°时,系统稳定;否则,系统失稳;PM<30°时系统存在振荡风险。
频率环采用VSG控制,电压环采用积分下垂控制时,无内环的GFM变流器与双内环的GFM变流器(即模型2与模型3)经不同电网强度送出时与电网阻抗交截情况如图5所示。可得出以下结论:GFM变流器幅频特性曲线较低,在弱电网下,次同步频段可能与电网阻抗特性曲线交截,但无内环结构的GFM变流器具有较大的相位裕度,在宽频范围内不存在振荡风险,因此整体来看GFM变流器具有弱电网稳定的特点;GFM变流器主要在近工频频段存在负阻尼区,双内环结构的GFM变流器相位裕度远低于无内环结构,其相频曲线接近负阻尼区,且在近工频频段出现容性进一步增强的区间,存在较大的次同步振荡风险,因此无内环的GFM变流器在强电网下的稳定性高于双内环控制结构;当采用LC滤波器时,高频段存在谐振峰和对应负阻尼区,在强电网下存在与电网阻抗交截的风险,双内环的引入可使该谐振峰后移且峰值降低,降低了LC滤波器引入的高频谐振风险。
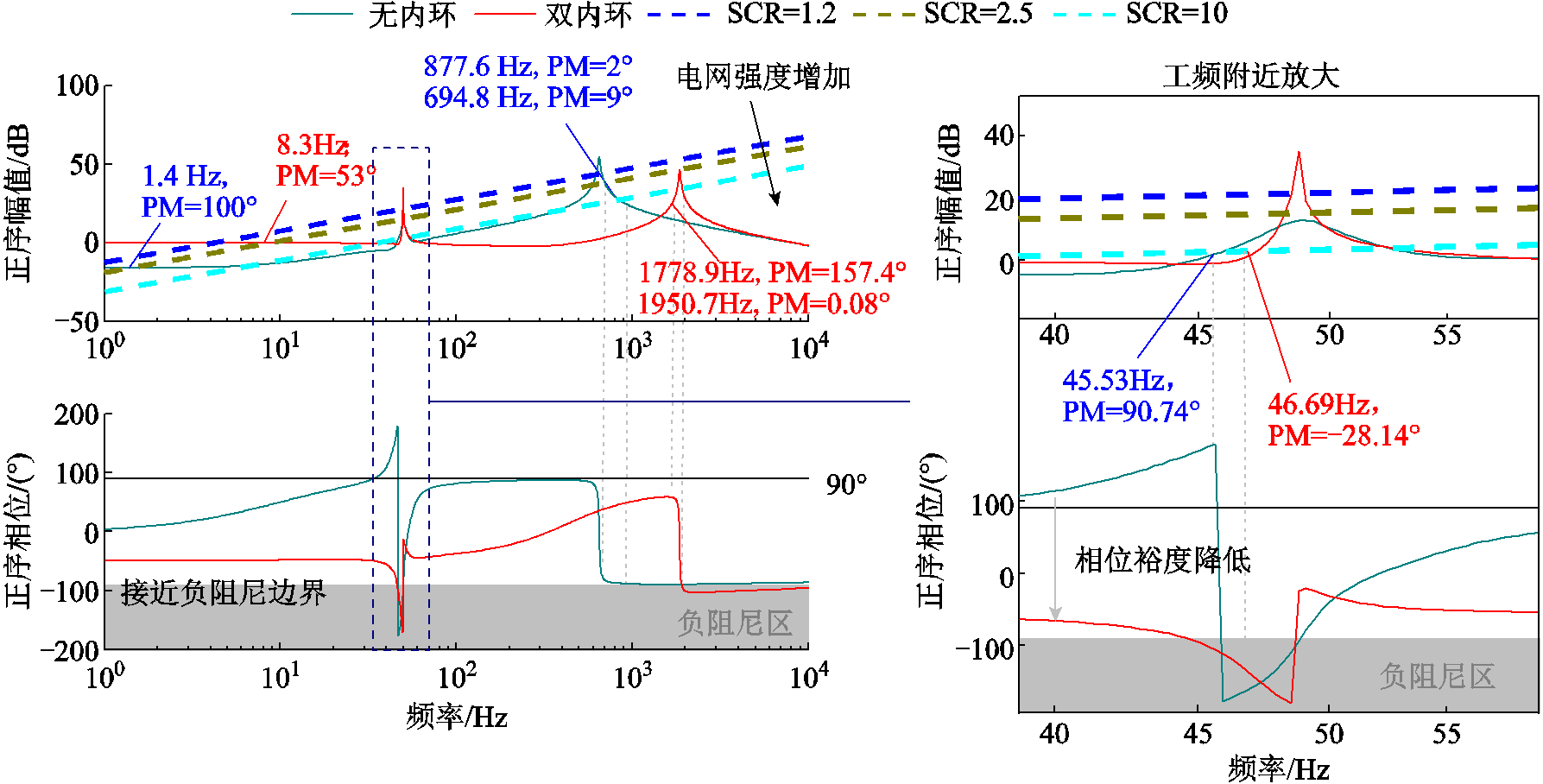
图5 无内环/双内环结构的GFM变流器与电网交互特性对比
Fig.5 Comparison of grid interaction characteristics between no-inner-loop/dual-inner-loop GFM
为了验证上述理论分析的正确性,本文基于Matlab/Simulink平台,按附表1所示参数分别搭建了上述并网系统仿真模型。设置电网的SCR在2 s时由4.6切换至6,在3 s时由6切换至10,此时无内环与双内环结构的PCC电压ua的时域波形对比及傅里叶分解结果如图6所示。可见随着电网强度的增大,在SCR=6时,无内环控制GFM变流器与双内环控制GFM变流器下均能稳定运行;当SCR= 10时,无内环控制GFM变流器可以稳定运行,而双内环控制GFM变流器发生了振荡,此时PCC存在44 Hz(fp)的扰动频次谐波分量以及56 Hz(2f1-fp)的耦合频次谐波分量,与理论分析结果基本一致,验证了并网稳定性分析结果的正确性。
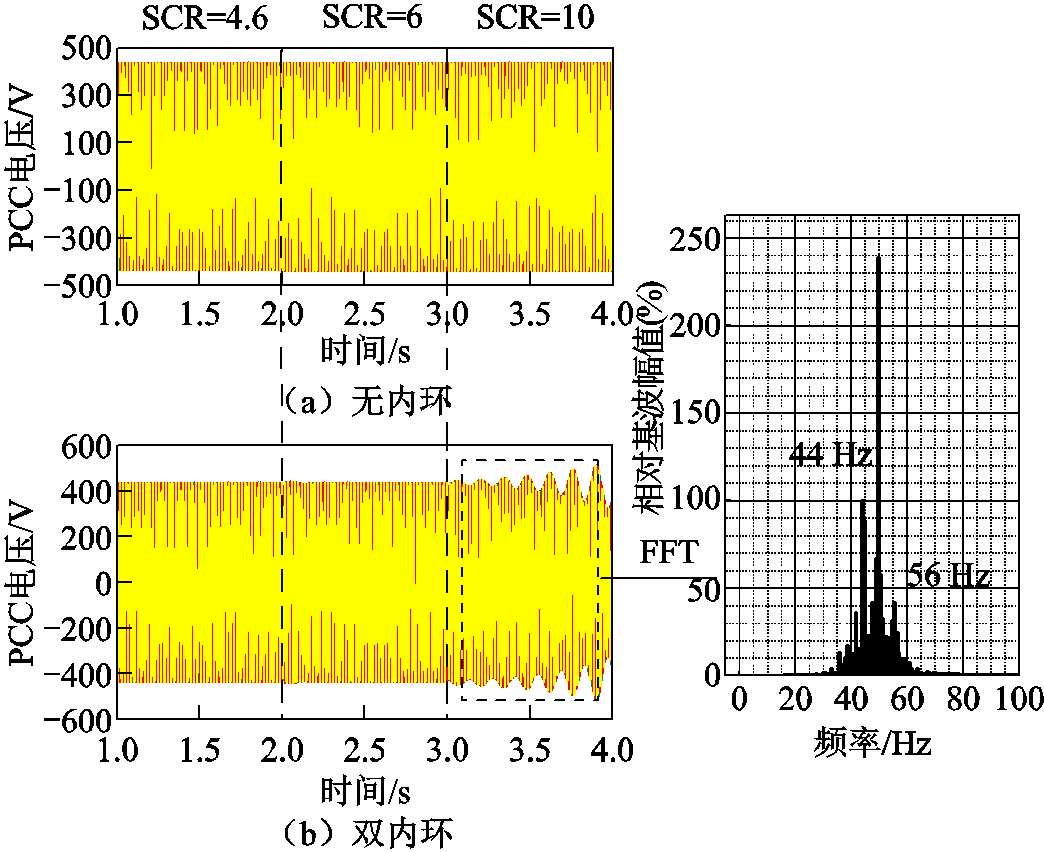
图6 强电网下时域仿真波形及傅里叶分解结果
Fig.6 Time-domain simulation waveforms and FFT results under strong power grid conditions.
为进一步分析外环控制结构对不同电网强度送出时并网稳定的影响,将第2节所述模型1、2、4阻抗特性对比如图7所示。可见模型1、模型4负阻尼区很小,虽然模型4的工频谐振峰较高、易与电网阻抗交截,但由于负阻尼区较窄,几乎不存在振荡风险(如SCR=2时,模型2与电网存在超同步频段的交截点,此时PM=92.19°,相位裕度充足);相比而言,模型2存在较大阻尼区,在SCR>3.5时会与电网阻抗交截,可能存在次同步振荡风险(如SCR=8时,PM=-77.41°)。因此,外环结构主要影响工频处阻抗幅值及负阻尼区宽度,频率环采用有功下垂控制,相较于VSG控制可显著降低工频处阻抗特性幅值并降低负阻尼区宽度;电压环采用无功下垂控制,相较于积分下垂控制可降低负阻尼区宽度。就工频附近小扰动稳定性而言,一阶控制结构优于二阶控制结构。
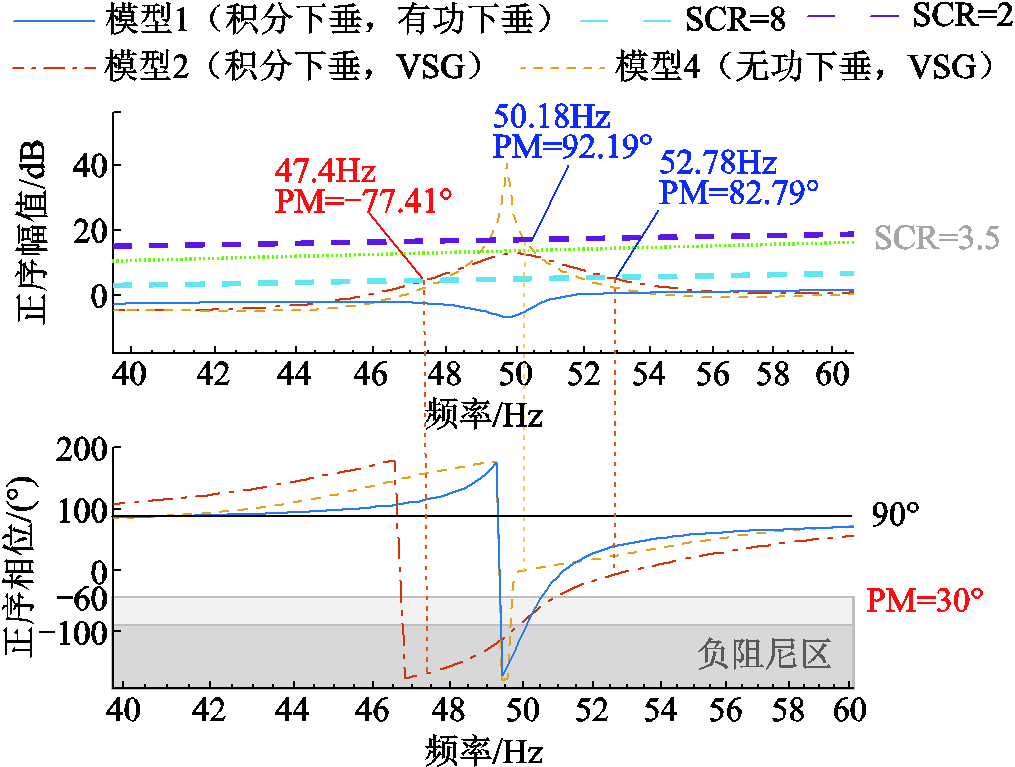
图7 无内环控制GFM变流器与电网交互特性对比
Fig.7 Comparison of grid interaction characteristics between no-inner-loop GFM and the grid
本小节分析GFM变流器经串补送出时的小扰动稳定性,对于串联补偿传输线,串补度(Series Compensation Level, SCL)为1/(ωnLgCg)×100%。GFM变流器并网系统经串补送出示意图如图8所示,Zg=sLg+Rg+1/(sCg),电容引入主要影响Zg次同步频段阻抗特性,因此,本小节研究100 Hz以下的阻抗交互特性。设置SCL分别为20%、35%和75%,电网均采用等值阻抗串联电压源的形式,除SCL不同外,电网结构相同[25]。
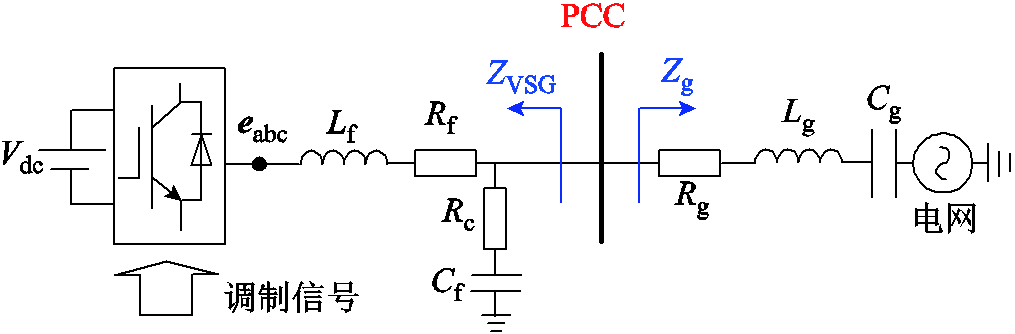
图8 GFM变流器并网系统经串补送出示意图
Fig.8 Schematic diagram of GFM grid-connected system with series compensation transmission
无内环控制GFM变流器与双内环控制GFM变流器与串补线在10~100 Hz的阻抗特性曲线如图9所示。
对于无内环结构的GFM变流器,在经串补送出时,次同步频段相位裕度接近稳定边界,系统存在次同步振荡风险,且随着串补度的升高交截频率升高,相位裕度降低;而由于双内环结构在次同步频段呈容性,与串补线相频特性相近,故相位裕度远大于无内环结构,因此,可通过引入电压电流双内环控制降低无内环控制的GFM变流器经串补送出时的次同步振荡风险。
基于Matlab/Simulink平台搭建无内环结构GFM变流器经串补送出的时域仿真模型。设置SCL在2 s时由0切换至70%,此时并网点电压ua的时域波形及频谱分析结果如图10所示,PCC存在41 Hz(fp)的扰动频次谐波分量以及59 Hz(2f1-fp)的耦合频次谐波分量,与理论分析结果基本一致,验证了上述阻抗分析结果的正确性。
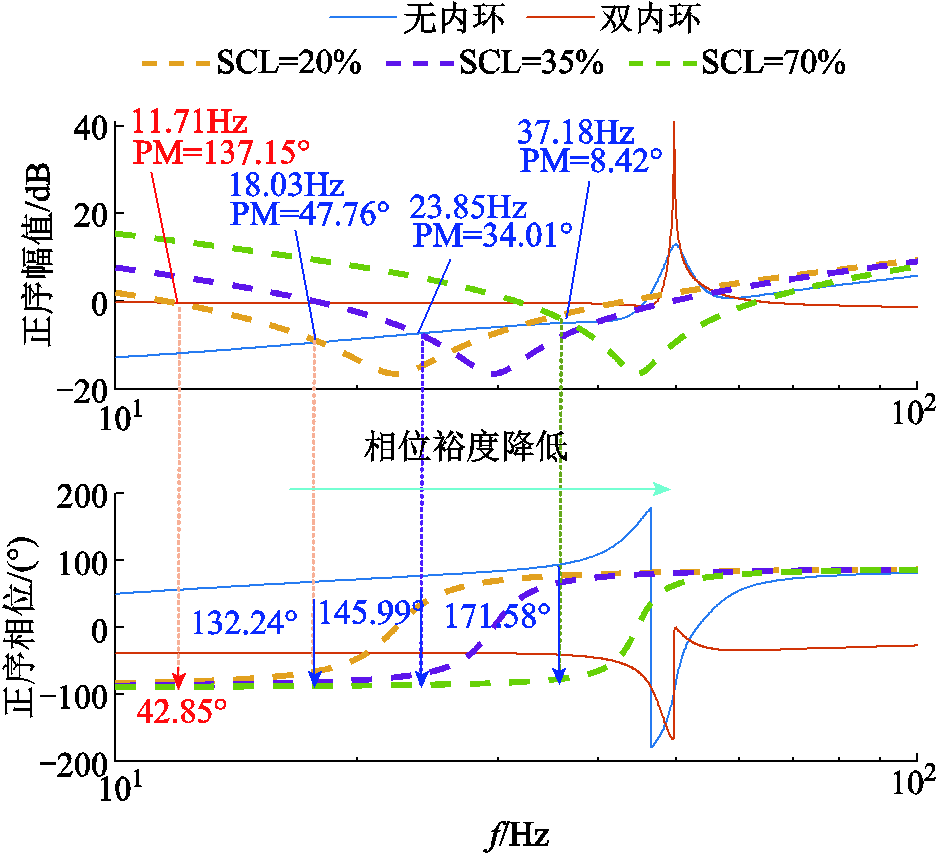
图9 无内环/双内环结构GFM变流器经串补送出系统阻抗对比
Fig.9 Comparison of system impedance for no-inner-loop and dual-inner-loop structures with series compensation
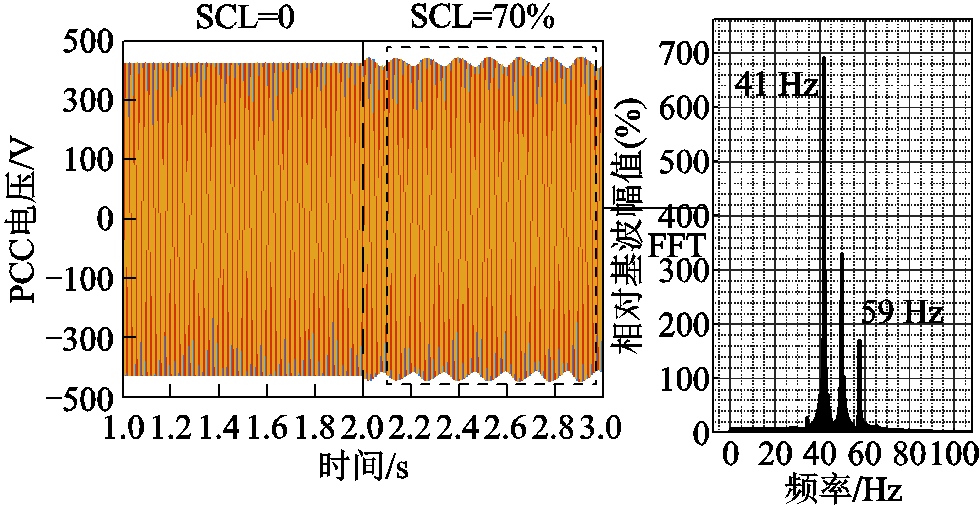
图10 无内环GFM变流器经串补送出时域仿真
Fig.10 Time-domain simulation of no-inner-loop GFM with series compensation
本节将结合第2节阻抗解析式及并网稳定性分析结果,进一步剖析内、外环对整体阻抗特性的作用机理及关键参数作用。
为分析外环采用不同控制结构的阻抗特性差异产生机理以及关键参数对阻抗特性的影响,本节将阻抗解析式进行分解,建立电压环与功率环解耦的序阻抗模型,分别分析电压环、频率环对阻抗特性的影响。
注意到对于无内环结构的GFM变流器,调制小信号ΔMa(s)表达式(22)可写为ΔMa1(s)与ΔMa2(s)两部分(以正序谐波信号为例),有
 (32)
(32)
 (33)
(33)
式中,ΔMa1取决于相位小扰动,反映了频率控制环动态对阻抗特性的影响;ΔMa2取决于电压小扰动,反映了电压控制环动态对阻抗特性的影响。以模型1为例,将式(15)、式(18)分别代入式(32)、式(33)得到外环采用一阶控制方式时频率环、电压环单独作用下的调制小信号为
 (35)
(35)
再将式(34)、式(35)中A1(s)、B1(s)及A2(s)、B2(s)分别代入主电路方程式(7)即可得到解耦的电压环、频率环正序阻抗。外环采用二阶控制方式时同理。将由ΔMa1决定的阻抗定义为“频率环阻抗”Zp1,表示只考虑频率环动态时的系统阻抗;由ΔMa2决定的阻抗定义为“电压环阻抗”Zp2,表示只考虑电压环动态时的系统阻抗。
次/超同步频段电压环/频率环阻抗对比如图11所示。对于频率控制环,如图11a所示,频率环动态会使工频处存在较高的幅频谐振峰并伴随相位扰动,其中VSG控制在工频处的谐振峰较高且尖锐,有功下垂控制在工频谐振处的谐振峰较低,与电网阻抗交截的风险降低且相位更稳定,次/超同步频段的并网稳定性较好。对于电压控制环,如图11b所示,两种控制方式的电压环在工频处幅值谐振峰均较低,无功下垂控制的相频特性相位平稳且不存在负阻尼区;积分下垂控制的相频特性则与VSG相似,工频处存在较大的相位骤降(170°~-180°),且存在负阻尼区,可能导致系统在工频附近逼近稳定边界。
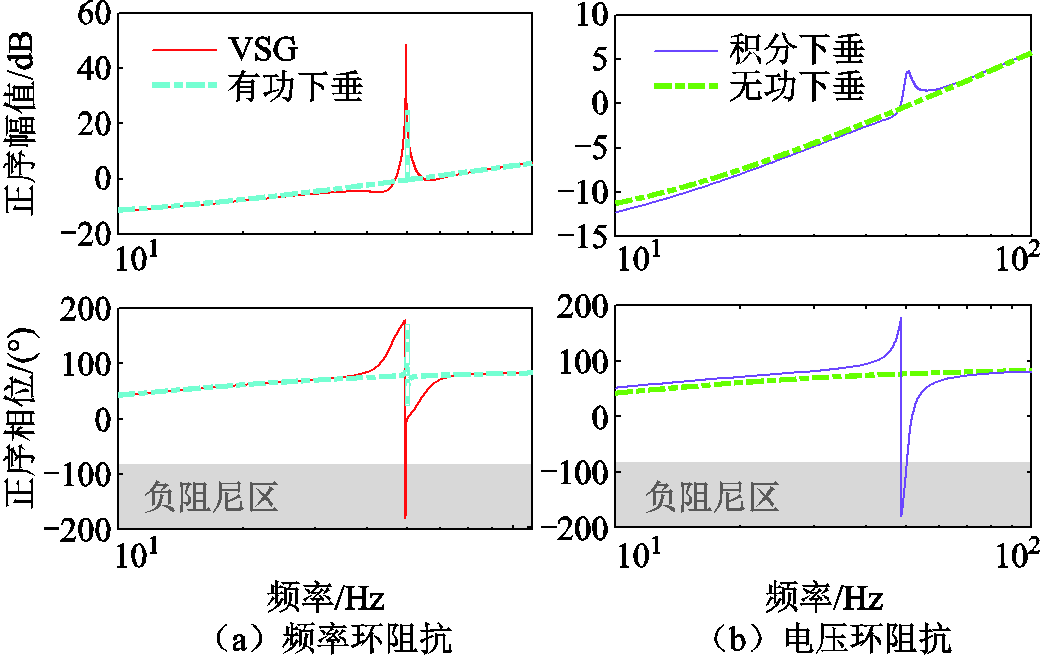
图11 不同控制结构下的电压环/频率环阻抗特性对比
Fig.11 Comparison of voltage loop/frequency loop impedance characteristics under different control structures
根据上述分析可知,无内环控制GFM变流器的振荡风险容易发生在工频谐振峰较高与电网阻抗交截且工频附近存在负阻尼区导致稳定裕度不足的条件下。而工频谐振峰由频率环主导,工频附近的负阻尼区由电压环主导,且主要来源于二阶控制结构。因此,本节进一步分析二阶控制结构下,控制参数对阻抗特性的影响。
惯性系数J、有功阻尼系数Dp改变对频率环阻抗的影响如图11所示。可见工频谐振峰主要受阻尼系数Dp影响,随着Dp的减小,阻抗在基频附近更宽的范围内呈现较大输出阻抗,阻抗幅值增大,相位变化率减小,因此,Dp增大有利于基频电流的稳定。
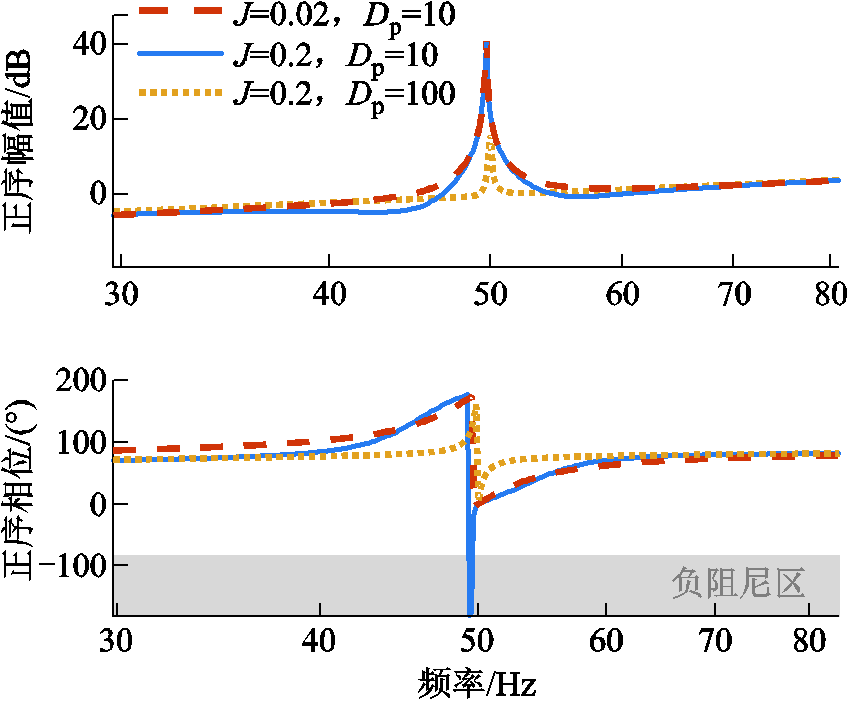
图12 J、Dp对频率环阻抗特性影响
Fig.12 Influence of J and Dpon frequency loop impedance characteristics
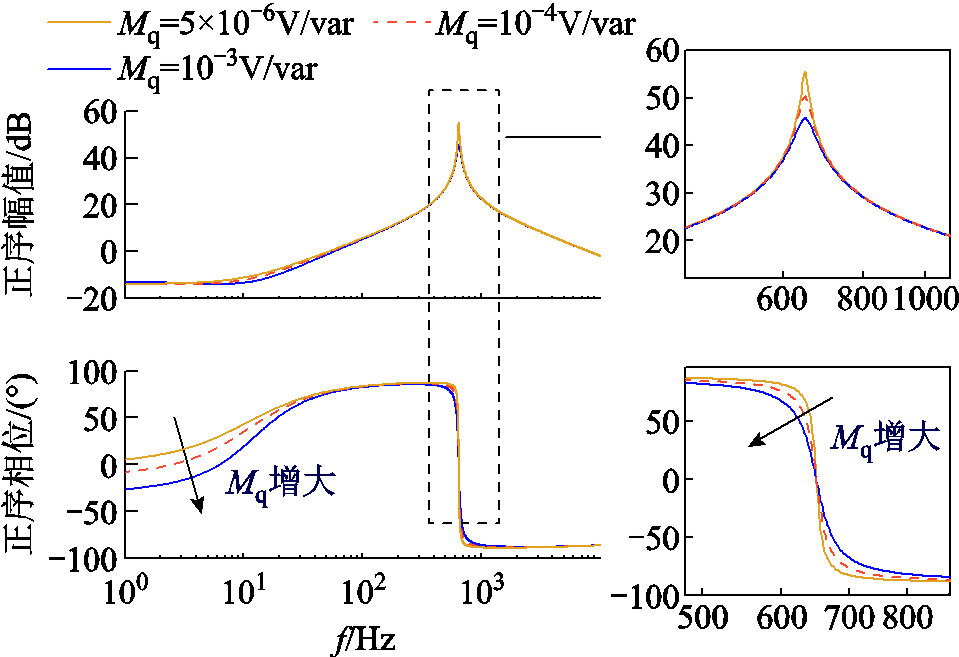
积分器增益K、电压偏差反馈系数Dq对电压环阻抗的影响如图13所示,可见K、Dq均可影响工频附近负阻尼区大小,Dq越大,次同步频段的负阻尼区越大;K越大,负阻尼区越小。综上所述,可以通过减小电压控制环电压偏差反馈系数Dq、增大频率控制环有功阻尼系数Dp的方式,降低由外环控制带来的振荡风险。
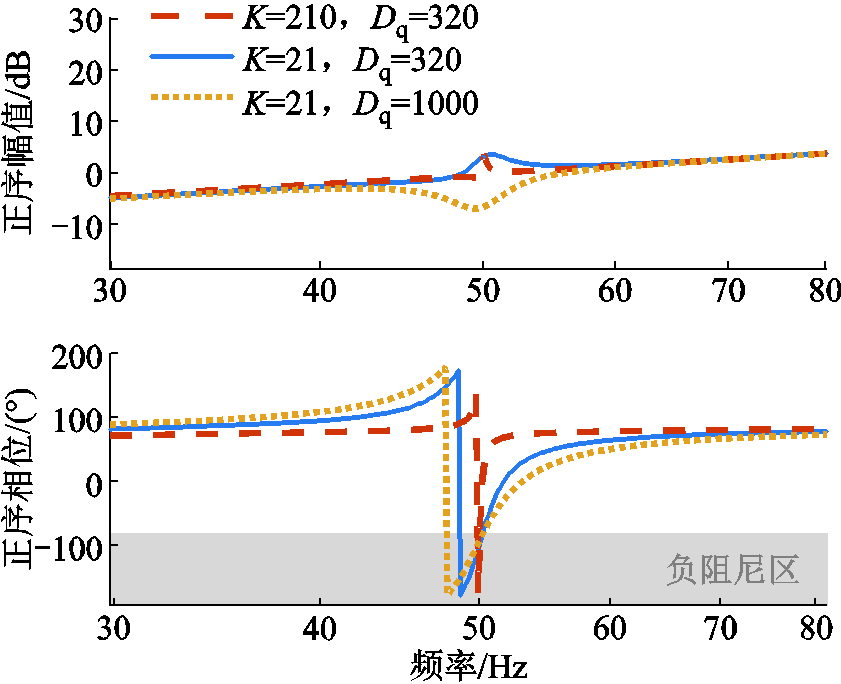
图13 K、Dq对电压环阻抗特性影响
Fig.13 Influence of K and Dq on voltage loop impedance characteristics
外环采用一阶控制结构时,下垂系数对次/超同步频段电压环、频率环的阻抗特性的影响如附图5、附图6所示。有功下垂系数Mp主要影响频率环阻抗在基频附近的阻抗特性,随着Mp的增大,基频附近更宽范围内呈现较大输出阻抗且相位变化率减小。因此,Mp增大虽然可以使功率调节更迅速但不利于基频电流稳定性,可能在负载功率变化瞬间造成振荡。无功下垂系数Mq主要影响次同步频段相位裕度及高频谐振峰相位变化率,随着无功下垂系数Mq的增大,次同步频段相位裕度降低,高频谐振峰幅值降低,相位突变趋于平缓,增大Mq同样不利于强电网送出条件下的并网稳定性。
根据第3节分析,电压电流双内环的引入对阻抗特性的主要影响为负电感效应及工频附近负阻尼区的进一步增大。首先,从双内环控制结构与电路方程出发,对负电感效应引入的机理进行说明。根据图1所示的主电路结构,在忽略滤波器附加电阻时,流经滤波电容上的三相电流满足
 (36)
(36)
对式(36)进行Park变换,得到dq坐标系下的电流方程为
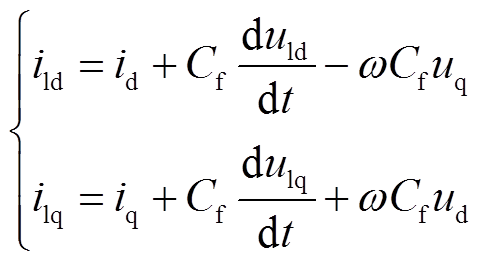 (37)
(37)
对式(37)进行拉氏变换得
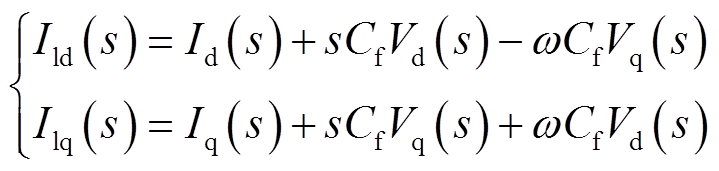 (38)
(38)
电压内环控制方程如式(26)所示,在电压环的时间尺度上,电流环可视为单位增益,即满足Idref(s)=Ild(s),Iqref(s)=Ilq(s),联立式(26)、式(38)可得
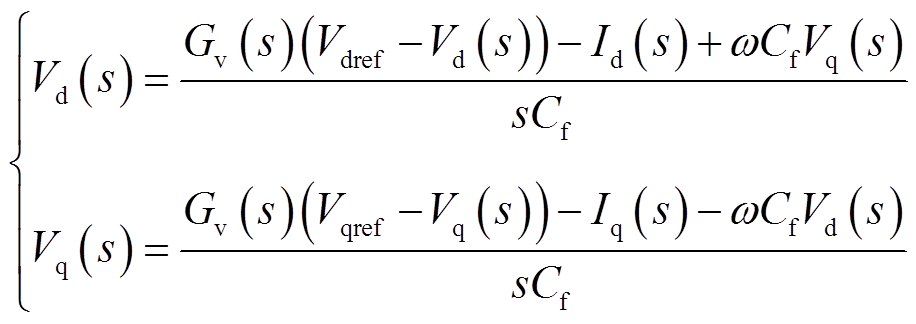 (39)
(39)
因此内环控制框图可简化为图14所示。
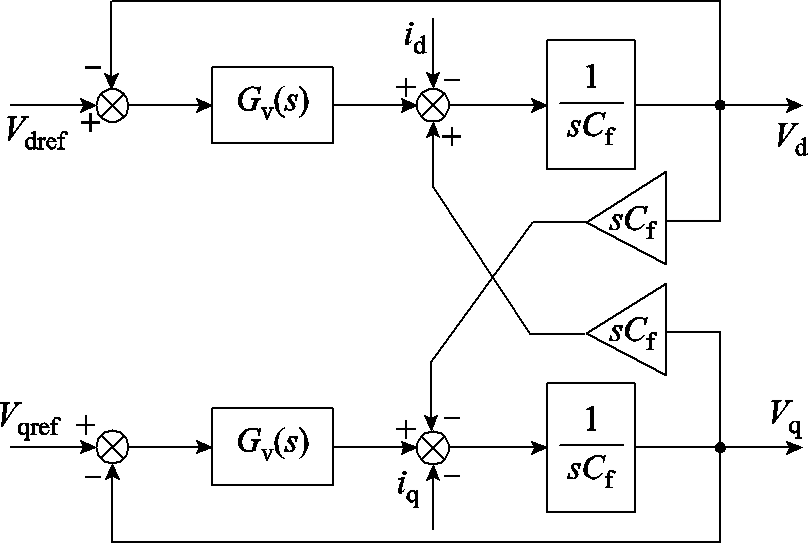
图14 简化内环控制框图
Fig.14 Simplified control block diagram for inner loop
由图14可见,电压-电流双内环控制将并网点电压控制为参考值,本质上是控制滤波器外电压;相应地,无内环的GFM变流器直接合成三相电压参考值输出为机端电压,本质上是控制滤波器内电压。因此从并网点看向变流器时,无内环结构的GFM变流器是滤波阻抗后的等效电压源,控制的效果使得滤波电抗在内环趋稳的时间尺度被抵消了,相当于在电路中引入了一个负电感。
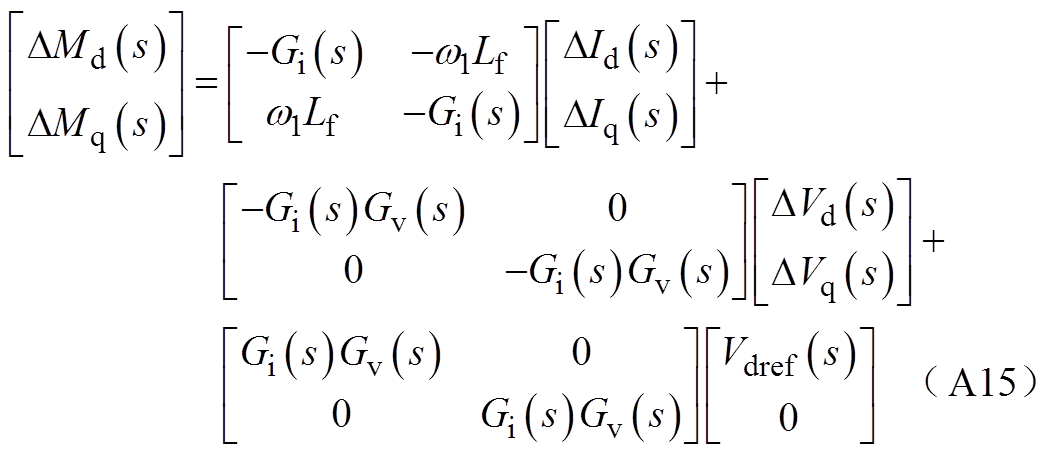
从阻抗表达式出发,可定量分析该“负电感”:无内环与双内环控制结构下,外环输出的调制信号分别如式(A14)、式(A15)所示,增加双内环控制后,相当于在变流器出口dq轴调制信号解析式中引入了一个附加电感矩阵HL,如式(40)所示,该矩阵表现为滤波器电感特性。
 (40)
(40)
该附加矩阵使得变流器出口调制电压增加了一个由电流流经感性元件产生的电压分量,不考虑滤波器对地支路时,主电路方程式(6)可写为
 (41)
(41)
式中,Zf为滤波器阻抗;Zeq为双内环引入的附加等效阻抗。
整理式(41)得到变流器输出阻抗表达式为
 (42)
(42)
可见,双内环的引入相当于在构网型并网系统的主电路中引入了一个以负的电感形式表现的容性阻抗元件-Zeq,削弱了并网系统的感性特征,即加入双环控制后构网型阻抗特性呈现阻抗相位减小,阻抗幅值增加的特点。另外,由于双环控制本身含两级PI,具备一定时间常数,因此在低频段,双环控制相当于一个容性阻抗,而在高频段双环控制作用减弱,无内环与双内环结构的构网型变流器在高频阻抗特性趋近。
双内环的引入对阻抗特性的另一个重要影响为工频附近负阻尼区的进一步增大。由4.1小节分析可知,工频谐振峰及对应负阻尼区由外环控制主导。本小节将双内环控制结构下的阻抗模型(模型3)阻抗解析式分解,进一步剖析内环引入与外环的相互作用。
不考虑相位小扰动时,式(27)中d轴调制信号小扰动表达式可重写为
 (43)
(43)
将式(43)定义为ΔMd1(s),剩余部分定义为ΔMd2(s),即ΔMd(s)=ΔMd1(s)+ΔMd2(s),其中ΔMd1(s)为不考虑频率环动态时d轴调制小信号,该部分由内环动态主导;ΔMd2(s)为频率环动态主导时d轴调制小信号。同理可将ΔMq(s)分解为ΔMq1(s)与ΔMq2(s)两部分,将式(26)、式(A8)及式(A9)代入式(28)、式(29)即可得Mdq1(s)、Mdq2(s)表达式,如附录式(A12)、式(A13)所示。
此时,双内环结构a相调制信号 表达式(31)亦可分解为
表达式(31)亦可分解为 与
与 两部分,如式(44)、式(45)所示,具体推导过程如式(A16)所示。
两部分,如式(44)、式(45)所示,具体推导过程如式(A16)所示。
 (44)
(44)
 (45)
(45)
将式(A10)代入式(44)可进一步整理为

观察 解析式(46)可知,
解析式(46)可知, 由内环动态决定,可将其定义为“内环阻抗”;而由相位小扰动产生,受频率环动态以及内环动态共同影响。将式(44)、式(45)分别代入式(7),即可得到双内环控制结构下的构网型变流器阻抗分解结果,其中,
由内环动态决定,可将其定义为“内环阻抗”;而由相位小扰动产生,受频率环动态以及内环动态共同影响。将式(44)、式(45)分别代入式(7),即可得到双内环控制结构下的构网型变流器阻抗分解结果,其中, 由内环动态决定、
由内环动态决定、 由频率环动态主导。频率环采用VSG控制,电压环采用积分下垂控制时阻抗分解结果如图15所示。
由频率环动态主导。频率环采用VSG控制,电压环采用积分下垂控制时阻抗分解结果如图15所示。
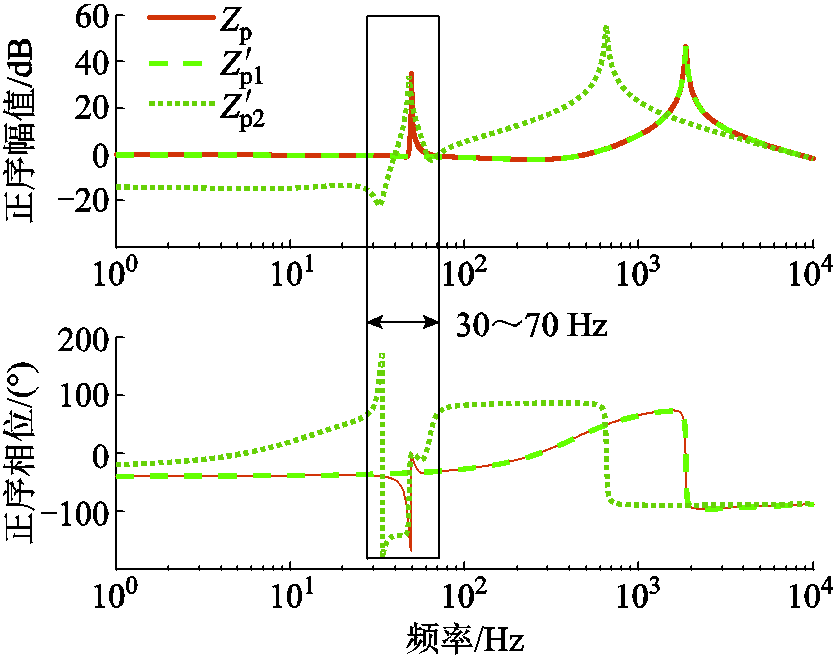
图15 双内环GFM变流器阻抗分解
Fig.15 Impedance decomposition of the GFM with dual-inner-loop
可得出以下结论:系统阻抗Zp在宽频段范围内与重合,因此可以用表达式拟合双内环模型在低频与中高频段的阻抗特性,如式(A17)所示,可大大简化双内环模型的阻抗建模;次/超同步频段(30~70 Hz)的阻抗特性由内环与频率环动态共同决定,与无内环结构相比,引入双内环与频率环共同作用,增大了频率环在次同步频段带来的负阻尼区,使相位裕度接近稳定边界;采用双内环控制时,外环输出电压幅值基频分量作为内环输入而不受电压幅值小扰动影响,因此可消除由电压环动态近工频负阻尼区。
针对GFM变流器控制拓扑复杂性与解耦困难、多场景交互差异与适配性解析两大难题,本文的主要研究成果如下:
1)本文提出的阻抗分解法将频率与电压的作用从阻抗上解耦,剖析了外环的独立贡献及双内环引入的作用机理:工频谐振峰及工频附近负阻尼区由外环主导,其中频率环主导工频谐振峰,外环采用一阶控制结构更有利于小扰动稳定性;双内环的引入可消除由电压外环带来的近工频负阻尼区,但会与频率环共同作用使双内环结构的GFM变流器在次同步频段呈现相角裕度进一步下降的趋势。
2)本文对不同控制拓扑GFM变流器阻抗特性的对比以及不同场景下的振荡风险分析可为不同GFM变流器对交流电网环境的适配性提供参考:无内环结构的GFM变流器外环采用二阶控制方式时在强电网下存在次同步振荡风险,但可通过优化外环控制结构/调整控制参数得到控制;双内环结构的引入使GFM变流器阻抗在次/超同步频段呈现容性,增加了强电网送出的振荡风险、降低了经串补送出的振荡风险。因此,从小扰动稳定性来看,无内环控制结构更适应强电网,双内环控制结构则更适应串补送出场景。
本文精细化建模过程可帮助工程设计人员掌握通用的建模方法,研究结果可为GFM变流器控制设计、GFM变流器并网系统次/超同步振荡来源及抑制策略提供理论依据,未来有必要针对新能源大基地中构网型变流器之间的交互作用进行进一步研究。
附 录
 (A1)
(A1)
 (A2)
(A2)
 (A3)
(A3)
 (A4)
(A4)
 (A5)
(A5)
 (A6)
(A6)
 (A7)
(A7)
 (A8)
(A8)
 (A9)
(A9)
 (A10)
(A10)
其中
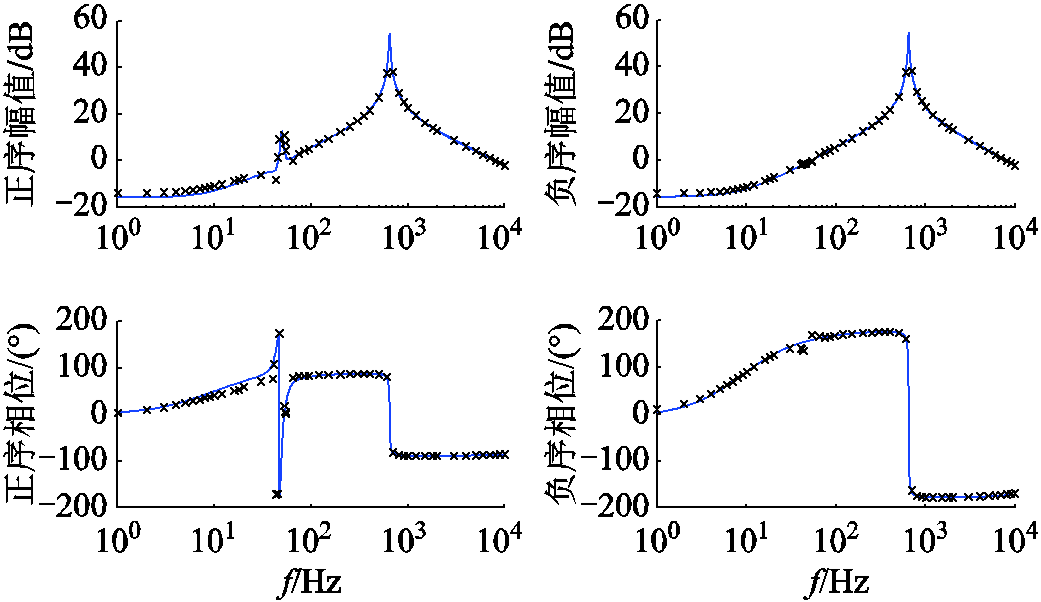
附图1 模型1正负序阻抗理论值与测量值对比
App.Fig.1 Comparison of positive-and negative-sequence impedance theoretical and measured values in Model 1
附表1 系统及控制器仿真参数
App.Tab.1 Simulation parameters of system and controller
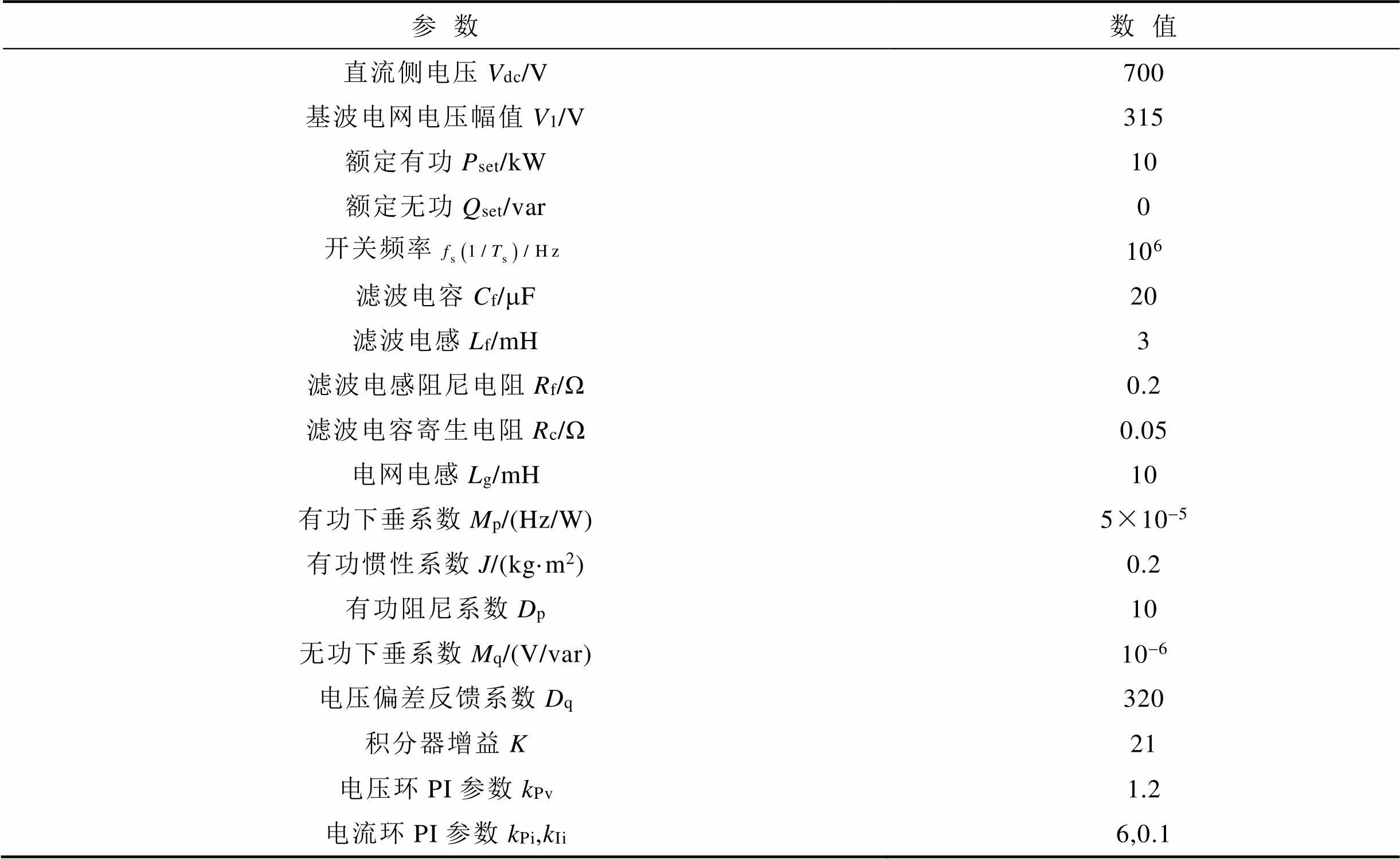
参数数值 直流侧电压Vdc/V700 基波电网电压幅值V1/V315 额定有功Pset/kW10 额定无功Qset/var0 开关频率106 滤波电容Cf/mF20 滤波电感Lf/mH3 滤波电感阻尼电阻Rf/Ω0.2 滤波电容寄生电阻Rc/Ω0.05 电网电感Lg/mH10 有功下垂系数Mp/(Hz/W)5×10-5 有功惯性系数J/(kg·m2)0.2 有功阻尼系数Dp10 无功下垂系数Mq/(V/var)10-6 电压偏差反馈系数Dq320 积分器增益K21 电压环PI参数kPv1.2 电流环PI参数kPi,kIi6,0.1
附图2 模型2正负序阻抗理论值与测量值对比
App.Fig.2 Comparison of positive- and negative-sequence impedance theoretical and measured values in model 2
附图3 模型4正负序阻抗理论值与测量值对比
App.Fig.3 Comparison of positive- and negative-sequence impedance theoretical and measured values in Model 4
附图4 模型3负序阻抗理论值与测量值对比
App.Fig.4 Comparison of theoretical and measured negative-sequence impedance for Model 3
附图5 Mq对电压环阻抗特性影响
App.Fig.5 Influence of Mq on voltage loop impedance characteristics
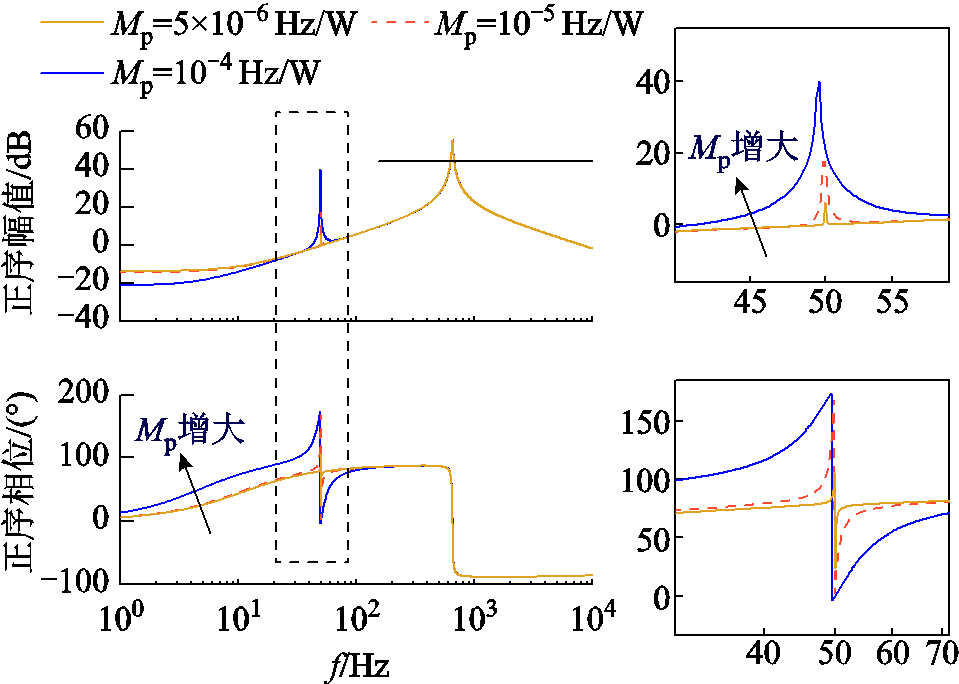
附图6 Mp对频率环阻抗的影响
App.Fig.6 Influence of Mp on frequency loop impedance characteristics
 (A12)
(A12)
 (A14)
(A14)
 (A17)
(A17)
参考文献
[1] 国网能源研究院. 新型电力系统发展分析报告2024[R].北京: 国网能源研究院, 2024.
[2] 国务院发展研究中心, 壳牌国际有限公司. 面向未来助力增长: 构建中国新型能源体系[M]. 北京: 中国发展出版社, 2024.
[3] NERC Joint and WECC Staff Report. 900 MW fault induced solar photovoltaic resource interruption disturbance report[R]. NERC Atlanta and GA USA Tech. Rep., 2018.
[4] 黄萌, 舒思睿, 李锡林, 等. 面向同步稳定性的电力电子并网变流器分析与控制研究综述[J]. 电工技术学报, 2024, 39(19): 5978-5994. Huang Meng, Shu Sirui, Li Xilin, et al. A review of synchronization-stability-oriented analysis and control of power electronic grid-connected converters[J]. Transactions of China Electrotechnical Society, 2024, 39(19): 5978-5994.
[5] 刘龙, 胡彬, 王垚鑫, 等. 构网型变流器宽短路比范围适应性分析与提升[J]. 电力系统自动化, 2025, 49(2): 64-72. Liu Long, Hu Bin, Wang Yaoxin, et al. Adaptability analysis and enhancement of grid-forming converter for wide-range short-circuit ratio[J]. Automation of Electric Power Systems, 2025, 49(2): 64-72.
[6] 詹长江, 吴恒, 王雄飞, 等. 构网型变流器稳定性研究综述[J]. 中国电机工程学报, 2023, 43(6): 2339-2359. Zhan Changjiang, Wu Heng, Wang Xiongfei, et al. An overview of stability studies of grid-forming voltage source converters[J]. Proceedings of the CSEE, 2023, 43(6): 2339-2359.
[7] Gao Fang, Iravani M R. A control strategy for a distributed generation unit in grid-connected and autonomous modes of operation[J]. IEEE Transactions on Power Delivery, 2008, 23(2): 850-859.
[8] D’Arco S, Suul J A. Virtual synchronous machines: classification of implementations and analysis of equivalence to droop controllers for microgrids[C]// 2013 IEEE Grenoble Conference, Grenoble, France, 2013: 1-7.
[9] 袁敞, 丛诗学, 徐衍会. 应用于微电网的并网逆变器虚拟阻抗控制技术综述[J]. 电力系统保护与控制, 2017, 45(9): 144-154. Yuan Chang, Cong Shixue, Xu Yanhui. Overview on grid-connected inverter virtual impedance technology for microgrid[J]. Power System Protection and Control, 2017, 45(9): 144-154.
[10] 刘辉, 于思奇, 孙大卫, 等. 构网型变流器控制技术及原理综述[J]. 中国电机工程学报, 2025, 45(1): 277-297. Liu Hui, Yu Siqi, Sun Dawei, et al. An overview of control technologies and principles for grid-forming converters[J]. Proceedings of the CSEE, 2025, 45(1): 277-297.
[11] Wang Xiongfei, Taul M G, Wu Heng, et al. Grid-synchronization stability of converter-based resources: an overview[J]. IEEE Open Journal of Industry Applications, 2020, 1: 115-134.
[12] 韩应生. 含高比例电力电子装置的电力系统宽频振荡分析方法与特性研究[D]. 武汉: 华中科技大学, 2023. Han Yingsheng. Research on the analysis method and characteristics of wideband oscillations in power systems with high proportional power electronic devices[D]. Wuhan: Huazhong University of Science and Technology, 2023.
[13] 尚佳宇, 虞家骏, 刘增, 等. 构网型与跟网型逆变器并联系统精确频域建模及简化稳定判据[J]. 电力系统自动化, 2025, 49(2): 53-63. Shang Jiayu, Yu Jiajun, Liu Zeng, et al. Accurate frequency-domain modeling and simplified stability criterion for parallel grid-forming and grid-following inverter system[J]. Automation of Electric Power Systems, 2025, 49(2): 53-63.
[14] 雷雨, 李光辉, 王伟胜, 等. 跟网型和构网型新能源并网控制阻抗对比与振荡机理分析[J]. 中国电机工程学报, 2025, 45(1): 150-163. Lei Yu, Li Guanghui, Wang Weisheng, et al. Comparison of impedance characteristics and oscil-lation mechanism for grid following and grid forming renewable energy[J]. Proceedings of the CSEE, 2025, 45(1): 150-163.
[15] 陈建, 任永峰, 孟庆天, 等. 含UDE附加阻尼支路的构网型直驱永磁同步风电机组次同步振荡抑制策略[J]. 电工技术学报, 2024, 39(7): 1985-2000. Chen Jian, Ren Yongfeng, Meng Qingtian, et al. Sub-synchronous oscillation suppression strategy for grid-forming direct-drive permanent magnet synchronous generator with uncertainty and disturbance estimator supplementary damping branch[J]. Transactions of China Electrotechnical Society, 2024, 39(7): 1985-2000.
[16] 高翔. 弱电网下功率同步构网型双馈风电机组稳定性分析与优化控制策略研究[D]. 合肥: 合肥工业大学, 2023. Gao Xiang. Stability analysis and optimization control strategy of power-synchronized grid-forming DFIG-wind turbines in weak grid[D]. Hefei: Hefei University of Technology, 2023.
[17] 郑雨萱, 陈兰杭, 李先允, 等. 构网型变流器多环控制阻抗建模与稳定性分析[J]. 自动化与仪表, 2024, 39(3): 1-6. Zheng Yuxuan, Chen Lanhang, Li Xianyun, et al. Impedance modeling and stability analysis for multi-loop control of grid-forming converter[J]. Automation & Instrumentation, 2024, 39(3): 1-6.
[18] Li Gaoxiang, Chen Yandong, Luo An, et al. Analysis and mitigation of subsynchronous resonance in series-compensated grid-connected system controlled by a virtual synchronous generator[J]. IEEE Transactions on Power Electronics, 2020, 35(10): 11096-11107.
[19] 高本锋, 沈雨思, 宋瑞华, 等. 虚拟同步机控制模块化多电平变流器阻抗建模及次/超同步振荡稳定性分析[J]. 电工技术学报, 2025, 40(2): 559-573. Gao Benfeng, Shen Yusi, Song Ruihua, et al. Impedance modeling and sub/super synchronous oscillation stability analysis of modular multilevel converter under virtual synchronous generator control[J]. Transactions of China Electrotechnical Society, 2025, 40(2): 559-573.
[20] Chen Xingyou, Si Wenjia, Yu Qun, et al. Transient stability analysis and enhancement of grid-forming converters: a comprehensive review[J]. Electronics, 2025, 14(4): 645.
[21] 刘钊汛, 秦亮, 杨诗琦, 等. 面向新型电力系统的电力电子变流器虚拟同步控制方法评述[J]. 电网技术, 2023, 47(1): 1-16. Liu Zhaoxun, Qin Liang, Yang Shiqi, et al. Review on virtual synchronous generator control technology of power electronic converter in power system based on new energy[J]. Power System Technology, 2023, 47(1): 1-16.
[22] Xiong Xiaoling, Zhou Yan, Luo Bochen, et al. Analysis and suppression strategy of synchronous frequency resonance for grid-connected converters with power-synchronous control method[J]. IEEE Transactions on Power Electronics, 2023, 38(6): 6945-6955.
[23] 詹修瑜, 袁辉, 胡光, 等. 系统强度视角下含跟网型和构网型设备混联系统的低频段小干扰稳定分析[J]. 电工技术学报, 2026, 41(3): 865-882. Zhan Xiuyu, Yuan Hui, Hu Guang, et al. Small-signal low-frequency stability analysis of power systems with grid-following and grid-forming devices based on system strength[J]. Transactions of China Electrotechnical Society, 2026, 41(3): 865-882.
[24] 刘泽洪, 郑炜, 李佳朋, 等. 构网型技术发展现状与前景[J]. 全球能源互联网, 2025, 8(4): 399-415. Liu Zehong, Zheng Wei, Li Jiapeng, et al. Status and outlook for the development of grid-forming technologies[J]. Journal of Global Energy Interconnection, 2025, 8(4): 399-415.
[25] 张琦, 刘俊良, 陈兵, 等. 一种基于并网电流反馈的构网型变流器次同步振荡抑制策略[J]. 电工技术学报, 2025, 40(9): 2795-2808. Zhang Qi, Liu Junliang, Chen Bing, et al. A sub-synchronous oscillation suppression strategy for the grid-forming converter based on grid-connected current feedback[J]. Transactions of China Electro-technical Society, 2025, 40(9): 2795-2808.
Abstract The multi-loop control architecture of grid-forming converters(GFMs)—comprising outer power synchronization loops and inner voltage-current regulation loops—introduces complex coupling across multiple timescales, complicating the characterization of impedance properties and the analysis of oscillation mechanisms, particularly under diverse grid conditions such as weak/strong grids and series-compensated lines. Although substantial research has been conducted on GFM oscillation stability, two major challenges remain: the complexity of control topologies and difficulties in decoupling, and the lack of adaptability analysis under multi-scenario interactions. To address these issues, this paper proposes a novel modulation signal-based control loop decoupling method that quantitatively isolates the individual contributions of the frequency loop, voltage loop, and dual inner loops to the impedance characteristics.
Firstly, the impedance expression of the GFM grid-connected system is shown to be determined by the transfer functions of modulated small signals with respect to voltage and current. Using harmonic linearization, these transfer functions were further decoupled to distinguish the effects of the frequency and voltage loops. The decoupled transfer functions were then incorporated into the impedance model to isolate the influence of each loop. This impedance decomposition method was also applied to GFMs with inner loops. By comparing the decomposition results of dual inner-loop control structures with those without inner loops, the interaction between the dual inner loops and the frequency/voltage loops can be analyzed separately. The study further revealed that the dual inner loops introduce an equivalent negative inductance, which counteracts the physical filter inductance and leads to capacitive impedance phase characteristics—a key factor affecting grid-connected stability. This mechanism was derived analytically through control path simplification and matrix operations. Frequency scanning in Matlab/Simulink demonstrated strong agreement between the theoretical and simulated impedance across a wide frequency range, validating the proposed model.
Impedance comparison and decomposition results indicate that the dual inner-loop structure decisively influences low-frequency capacitive behavior and high-frequency resonance peaks. By effectively controlling the voltage outside the filter, the dual inner loops counteract part of the filter impedance under steady control conditions, resulting in two major effects: (1) The phase-frequency characteristics of the GFM approach the negative damping region over a wider frequency range, shifting the high-frequency resonance backward. (2) The risk of high-frequency oscillation in GFMs connected via LC filters is reduced. The outer loops primarily affect impedance characteristics near the fundamental frequency. The power-frequency resonance peak is dominated by the frequency loop. Compared to virtual synchronous generator (VSG) control, active power droop control significantly reduces the impedance magnitude at fundamental frequency and narrows the negative damping region. Similarly, reactive power droop control reduces the negative damping region more effectively than integral droop control. Thus, first-order control structures outperform second-order ones in terms of small-signal stability near fundamental frequency.
Stability comparisons under different grid conditions yield the following conclusions: (1) The oscillation risk of GFMs without inner loops in strong grids can be mitigated by adopting first-order control structures or adjusting control parameters, such as reducing the voltage deviation feedback coefficient in the voltage loop and increasing the damping coefficient in the frequency loop. (2) The introduction of dual voltage-current inner loops increases oscillation risks in strong grids but enhances stability in series-compensated transmission scenarios. These findings are corroborated by time-domain simulations.
keywords:Grid-forming converter, voltage and current dual loop control, sequence impedance modeling, oscillation stability, grid strength, series compensation
DOI: 10.19595/j.cnki.1000-6753.tces.250458
中图分类号:TM712
国家电网公司科技资助项目(4000-202414073A-1-1-ZN)。
收稿日期 2025-03-22
改稿日期 2025-09-10
闫子晗 女,2001年生,硕士研究生,研究方向为新能源并网稳定性分析与控制。Email:15102668716@163.com
艾 欣 男,1964年生,博士,教授,博士生导师,研究方向为新能源电力系统及微网。Email:aixin@ncepu.edu.cn(通信作者)
(编辑 赫 蕾)