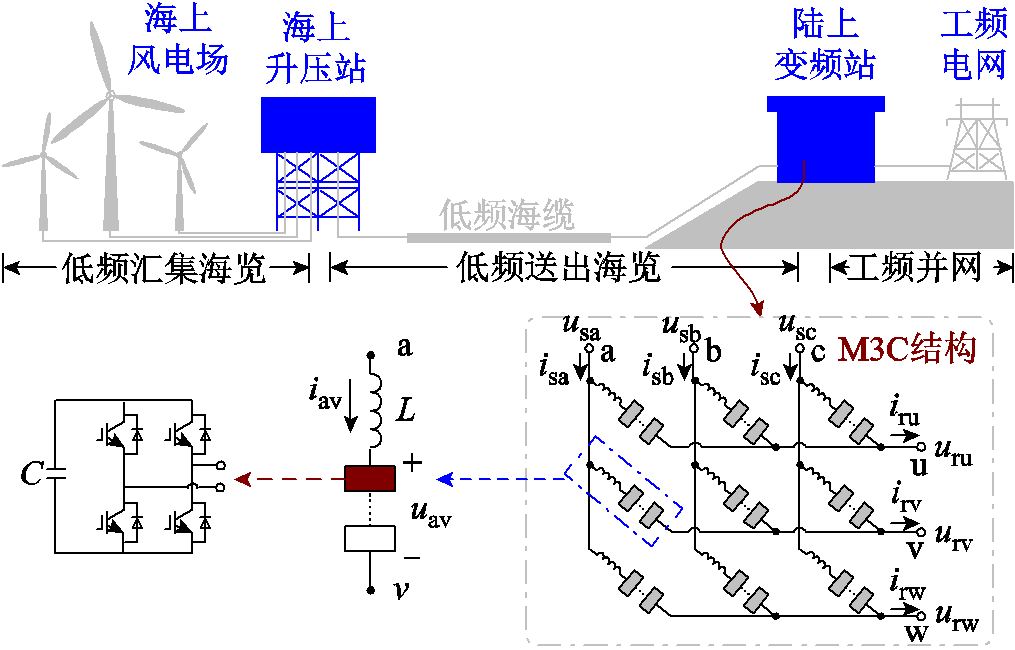
图1 海上风电低频送出系统基本结构
Fig.1 Basic structure of low-frequency AC transmission system for offshore wind power
摘要 基于模块化多电平矩阵变换器(M3C)的低频输电方式在远海风电送出场景中具有巨大潜力,而M3C作为电压源型换流器,在电流矢量控制下高频段存在负阻特性,易引发高频振荡。该文为明确海上风电低频送出系统潜在的高频振荡现象及机理,首先建立M3C四端口导纳模型,并在保持端口自导纳特性的约束下,给出了基于平均曼哈顿距离描述的降阶处理过程;其次,结合风电场单机等值和M3C四端口降阶导纳模型,通过阻抗集成分析了海上风电低频送出系统低频海缆长度、M3C桥臂电感、控制延时等关键参数对高频振荡特性的影响,并提出基于虚拟阻感支路的附加控制策略与考虑风电场阻抗宽范围分布的参数设计方法;最后,结合Matlab/Simulink时域仿真和控制硬件在环实验,验证了导纳建模、高频振荡机理分析的有效性及附加控制策略设计的鲁棒性。
关键词:低频送出系统 模块化多电平矩阵变换器 导纳模型 高频振荡 抑制策略
随着我国“双碳”目标的稳步推进,加速规模化开发深远海上风电已经成为重要的能源发展战略之一,大容量、远距离的海上风电送出方式备受关注[1-3]。受交流线路传输距离的限制,直接工频交流输电仅适用于近海风电送出,而基于模块化多电平变换器的柔性直流输电技术相对成熟,是目前最为主流的远距离送出方案[4-5],如南汇柔性直流输电工程、美国Trans Bay Cable工程[6-7]等。然而,海上换流站造价相对较高,大容量直流断路器技术尚不成熟,在一定程度上制约了远距离海上风电的发展。低频输电作为折衷方案,兼顾了输电容量与工程经济性,以直驱风机为主的海上风电场,风机网侧变流器经低频改造就可接入,具有良好的应用前景,因而近年来得到学术界和工业界的广泛关注[8]。
较为典型的远距离海上风电低频送出系统涉及风电机组、低频汇集海缆、低频输电海缆、变频站等。变频站是低频送出系统的核心,现有的集成方案多围绕模块化多电平矩阵变换器(Modular Multilevel Matrix Converter, M3C)展开。M3C各桥臂由全桥子模块级联构成,克服了传统变频器因受功率器件耐压限制难以用于高压大功率场合的缺点,且兼具低频侧和工频侧的灵活控制能力[9]。然而,M3C存在多个控制环路,其输入输出控制一般采用dq坐标系,内部环流及均压控制则基于双ab坐标系,是典型的多输入多输出系统,模型复杂度与准确度间的矛盾极为突出。文献[10]通过叠加定理将M3C拆分为两个不同主导频率分量的子系统,并在低频和工频子系统拆分的基础上建立了小信号模型。文献[11]则在双ab0坐标系下对M3C低频与工频分量分别进行dq变换,并建立了数学模型。文献[12]则进一步考虑电容电压低频侧二次谐波动态,建立了dq坐标系的M3C小信号模型。文献[13]建立了M3C低频侧dq轴阻抗模型,并结合阻抗矩阵k-范数对低频侧系统的稳定性实施快速判别,但未涉及工频侧阻抗、低频-工频耦合阻抗的建模和分析。
作为电压源型换流器,M3C在电流矢量控制下,高频段同样存在负阻特性,易导致谐波振荡现象[14]。文献[15]梳理了低频输电系统可能发生的振荡类型,并给出了浙江杭州低频输电示范工程在试运行阶段的2 100~2 300 Hz高频振荡案例。对于海上风电低频送出系统,以风电机组和海缆为核心的低频侧系统、工频交流电网均存在多种工况,阻抗特性复杂,发生高频振荡的风险会更为突出,但目前针对性的研究却相对较少,机理尚未完全明晰。与状态空间法相比,阻抗法不依赖系统的统一建模,可利用端口外特性直接定量评估系统的稳定性,在稳定性机理分析与解释上具备一定优势[16]。考虑到M3C的运行特点与控制复杂度,应用阻抗法研究海上风电低频送出系统的高频振荡机理需重点处理两方面因素:①保证阻抗模型的覆盖频段,且模型复杂度应相对可控,可使用直接截断法、Pade近似法、Routh近似法等对阻抗模型进行降阶处理[17-18];②M3C作为多输入多输出多控制环路系统,应保留主要环路,并与低频侧、工频侧系统进行集成分析,最终实现不因模型简化而缺失识别问题的准确性或因模型复杂阻碍振荡机理的研究和抑制方案的可靠设计。
针对海上风电低频送出系统高频振荡机理分析与抑制需求,本文首先建立了便于系统集成的M3C四端口导纳模型,并在保持端口自导纳特性的约束下给出了采用平均曼哈顿距离描述的截断式降阶处理过程;其次,结合直驱风电场单机等值输出阻抗及低频海缆多段串联π型等效,通过阻抗集成着重针对低频侧潜在高频振荡展开了分析,根据阻抗交截分布特征将高频振荡划分为两个典型频段,明确了产生及影响低频侧高频振荡现象的关键参数;然后,基于串联虚拟阻感支路,提出了高频振荡附加控制策略与考虑风电场阻抗宽范围分布的参数设计方法;最后,结合Matlab/Simulink时域仿真和控制硬件在环实验,验证了导纳建模、高频振荡机理分析的有效性与附加控制策略设计的鲁棒性。
基于M3C的海上风电低频送出系统基本结构如图1所示,包括海上风电场、低频汇集海缆、海上升压站、低频送出海缆、陆上变频站等。其中陆上变频站主要包含隔离变压器和M3C变换器,每个桥臂由桥臂电感L和n个全桥子模块构成,子模块电容记为C。
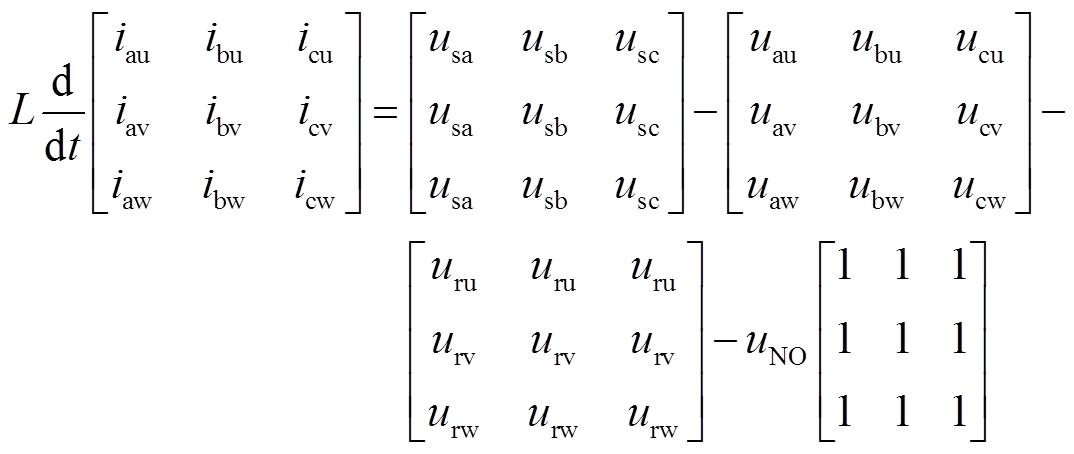
由图1,M3C桥臂电流动态过程可表示为
图1 海上风电低频送出系统基本结构
Fig.1 Basic structure of low-frequency AC transmission system for offshore wind power
 (1)
(1)
式中,usx和isx分别为低频侧的相电压和相电流,下标x∈{a,b,c}表示M3C低频侧端口三相编号;ury和iry分别为工频侧相电压和相电流,下标y∈{u,v,w}表示工频侧端口三相编号;uNO为低频与工频侧中性点间压差;uav和iav分别为桥臂av输出电压和电流,其他桥臂输出电压和电流定义类似,不再赘述。
考虑恒功率变换,对式(1)进行双αβ变换可得
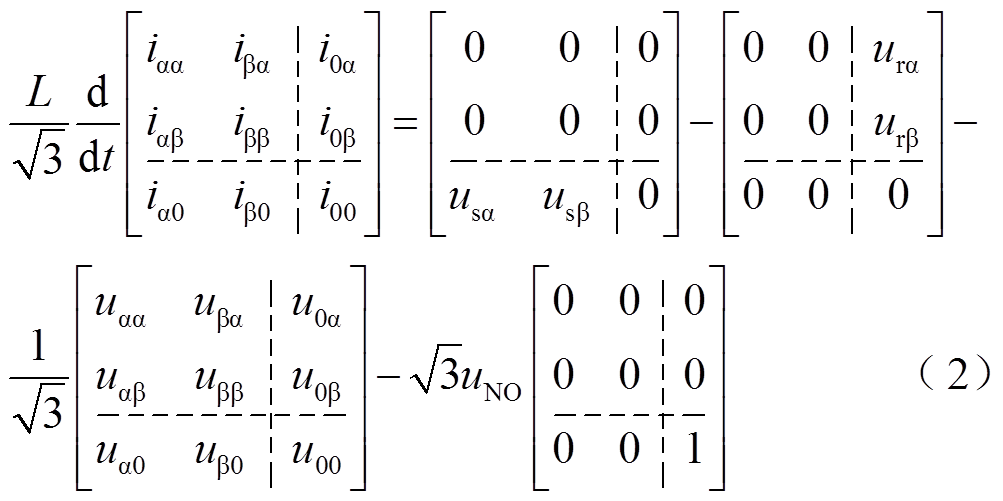
式中,iαα、iβα、iαβ、iββ、iα0、iβ0、i0β、i0α、i00分别为桥臂电流在双αβ坐标系下的分量;uαα、uβα、uαβ、uββ、uα0、uβ0、u0β、u0α、u00分别为桥臂输出电压在双αβ坐标系下的分量;urα、urβ为工频侧端口电压在双αβ坐标系下的分量;usα、usβ为低频侧端口电压在双αβ坐标系下的分量。
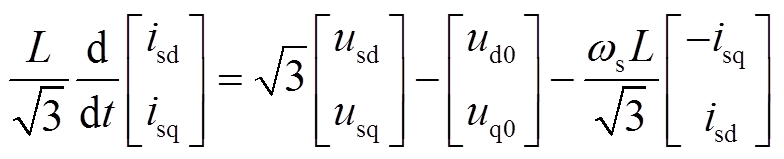
对式(2)等号左侧矩阵进行分块,左上角和右下角矩阵分别对应桥臂间环流和零序电流,左下角和右上角子矩阵对应桥臂电流的低频和工频分量。若仅关注低频和工频分量的动态,αβ-dq变换后可得
 (3)
(3)
 (4)
(4)
式中,isd、isq与ird、isq分别为iα0、iβ0与i0α、i0β经αβ-dq变换后的分量;usd、usq与urd、urq分别为usα、usβ与urα、urβ经αβ-dq变换后的分量;ud0、uq0与u0d、u0q分别为uα0、uβ0与u0α、u0β经αβ-dq变换后的分量;ωs、ωr分别为低频侧、工频侧系统的角频率。
对于各桥臂子模块电容电压的动态过程,以桥臂为基本单位,对各子模块电容电压求和并进行双ab变换,可得8个与电容电压均衡相关的分量和1个表示总体电容电压的分量 。受总体功率流入、流出影响,具体可表示为
。受总体功率流入、流出影响,具体可表示为
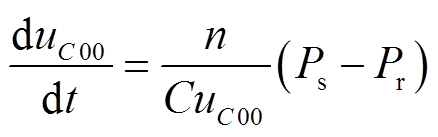 (5)
(5)
式中,Ps和Pr分别为由低频侧流入M3C和M3C传递至工频侧系统的有功功率。
根据式(2)~式(4),M3C桥臂电流低频和工频分量的控制可在dq坐标系下实施,内部环流和电容均压控制则建立在ab坐标系下,三者电压指令值叠加后变换到三相静止坐标系下即可作为调制信号。以最近电平调制(Nearest Level Modulation, NLM)为例,图2给出了整体控制框图,其中低频侧采用定交流电压控制,用于消纳海上风电场送出功率,工频侧d轴和q轴分别控制电容电压和工频并网无功功率[19]。为与系统坐标系做区分,控制坐标系中相关变量标注上标c,另外控制中指令值标注上标*。Gsi(s)和Gsu(s)分别为低频侧内、外环PI,Gri(s)和Gru(s)对应工频侧内、外环PI。式(3)~式(5)给出了考虑外特性情况下的M3C数学模型,结合图2所示控制方式、低频海缆π型等值和风电场等值[20],即可实现较为完整的海上风电低频送出系统的建模。
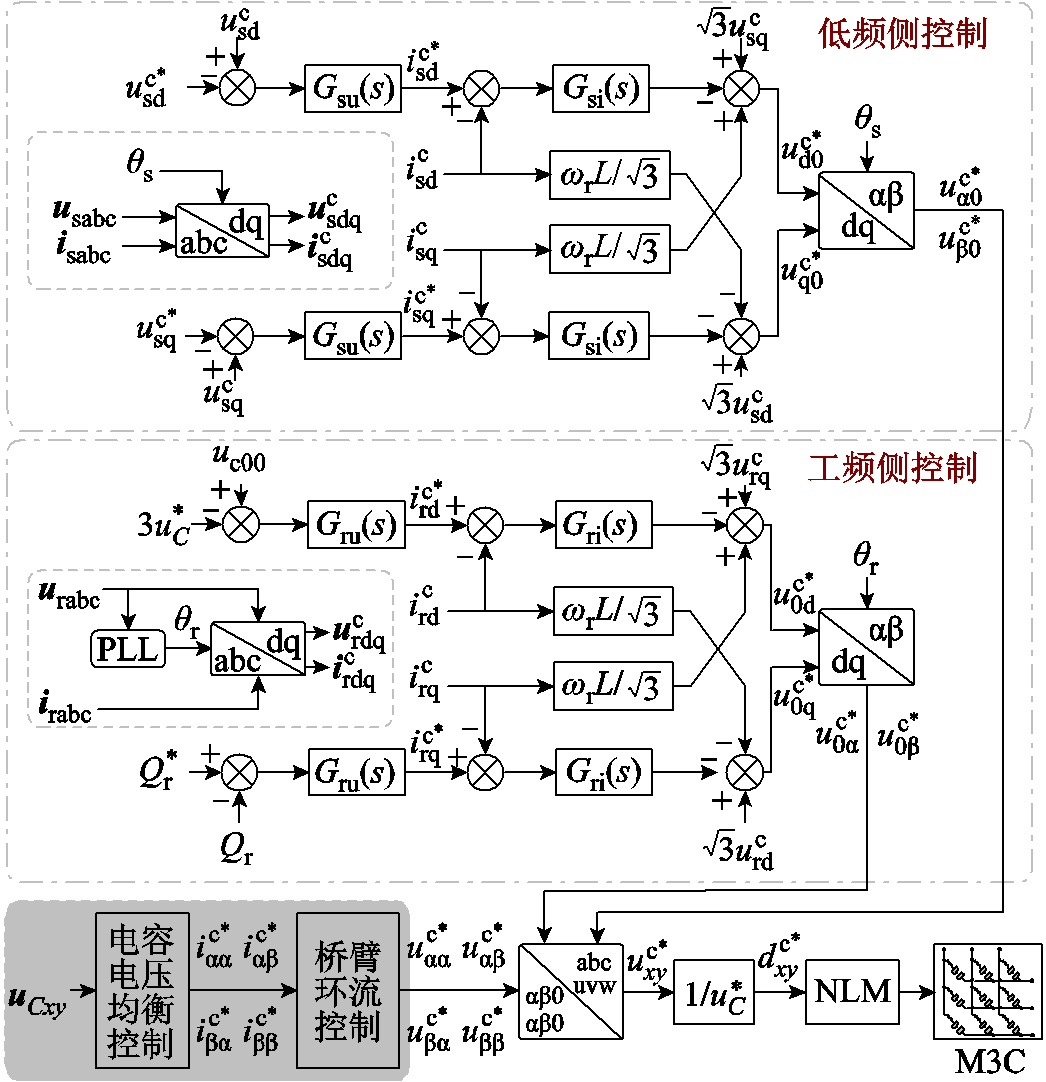
图2 海上风电送出场景下M3C控制框图
Fig.2 Control block diagram of M3C for offshore wind power transmission
M3C外部控制特性直接影响整个海上风电低频送出系统的稳定性能。在M3C内部桥臂电压均衡的前提下,环流控制对低频与工频侧系统的稳定性影响较小,以下主要围绕低频侧与工频侧控制进行小信号建模。定义对角矩阵M0=diag(1, 1, -1, -1),对式(3)~式(5)线性化可得
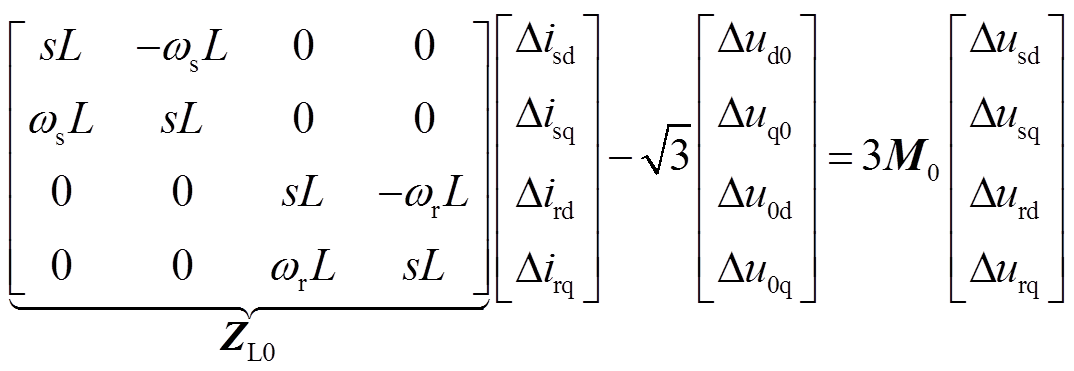 (6)
(6)

式中,∆表示相应变量的小信号量;Usd和Usq分别为M3C低频侧端口电压usd和usq的稳态值;Isd、Isq等变量定义方式类似,均用大写变量表示相应小写变量的稳态值。
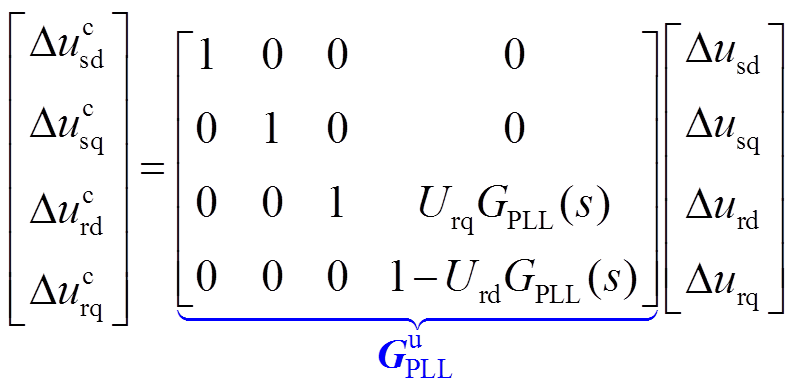
低频侧外环采用定交流电压控制,不需要配置锁相环,因此低频侧系统dq坐标系与控制dq坐标系一致。工频侧受电网条件和锁相环跟踪影响,在出现扰动时,工频侧控制dq坐标系相对工频侧系统dq坐标系会出现相位偏差∆θPLL,两个坐标系下电压小信号量的转换关系为
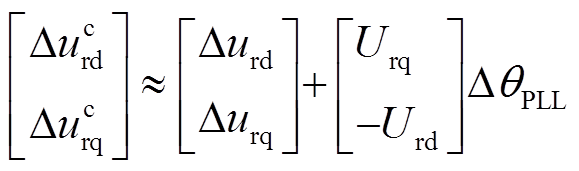 (8)
(8)
对于基于同步参考坐标系(Synchronous Reference System, SRF)型锁相环,∆θPLL可表示为
 (9)
(9)
式中,GPLL(s)为∆urq输入的锁相环传递函数;kppll、kipll分别为锁相环比例、积分系数。
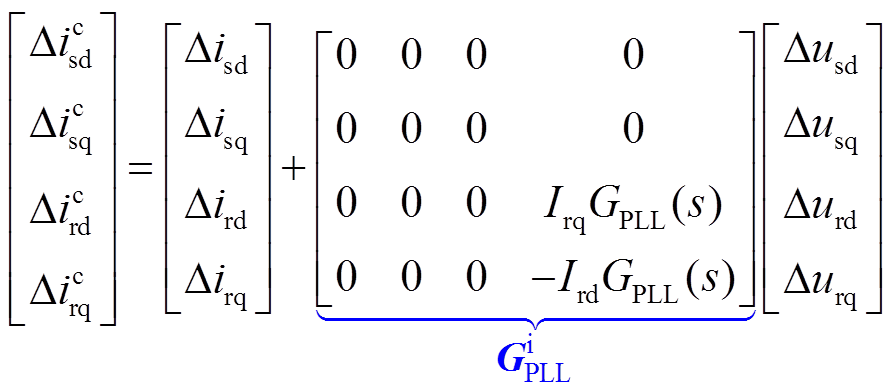
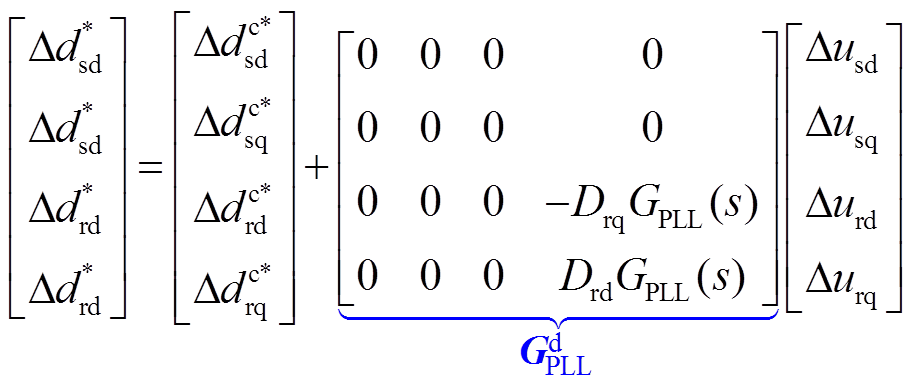
类似地,可得式(10)和式(11)所示电流及占空比在工频侧控制坐标系和工频侧系统坐标系间的转换关系。
 (10)
(10)
 (11)
(11)
式中, 、
、 分别为工频侧调制占空比d轴分量
分别为工频侧调制占空比d轴分量 、q轴分量
、q轴分量 的小信号量;
的小信号量; 、
、 分别为工频侧调制占空比指令d轴分量
分别为工频侧调制占空比指令d轴分量 、q轴分量
、q轴分量 的小信号量;Drq、Drd分别为实际工频侧调制占空比d轴分量drd、q轴分量drq稳态值。
的小信号量;Drq、Drd分别为实际工频侧调制占空比d轴分量drd、q轴分量drq稳态值。
结合图2可得式(12)和式(13)所示控制器电流内环和外环的小信号方程。
 (12)
(12)
 (13)
(13)
对于调制部分,低频侧与工频侧的电流内环输出与占空比指令值满足
 (14)
(14)
式中, 为桥臂电容电压之和的指令值;
为桥臂电容电压之和的指令值; 、
、 分别为低频侧调制占空比指令d轴分量、q轴分量的小信号量;
分别为低频侧调制占空比指令d轴分量、q轴分量的小信号量; 、
、 、
、 、
、 分别为ud0、uq0、u0d、u0q控制器参考指令的小信号量。
分别为ud0、uq0、u0d、u0q控制器参考指令的小信号量。
由于M3C主控制器与桥臂级控制器一般采用并行处理,且前者计算耗时大于后者,因此本文主要考虑M3C主控制器计算及采样引入的延时 ,采用三阶泰勒展开近似保证0~5000 Hz宽频段建模的准确性。
,采用三阶泰勒展开近似保证0~5000 Hz宽频段建模的准确性。
 (15)
(15)
式中,控制延时Tc设为1.5拍控制周期。
由于M3C的调制增益为桥臂整体电容电压,则桥臂输出电压与占空比的小信号量满足
 (16)
(16)
为了便于M3C小信号模型与两侧系统的集成,进而从阻抗角度进行并网运行特性分析,以下给出M3C四端口导纳的建模过程。以M3C低频与工频侧dq轴电压为输入,式(8)、式(10)和式(11)可拓展为
 (17)
(17)
 (18)
(18)
 (19)
(19)
M3C工频侧d轴外环控制桥臂总体电容电压,由决定。考虑到建模完整性,在四端口导纳建模中考虑 ,即将式(7)代入式(16),整理可得桥臂输出电压与占空比小信号量的关系为
,即将式(7)代入式(16),整理可得桥臂输出电压与占空比小信号量的关系为
 (20)
(20)
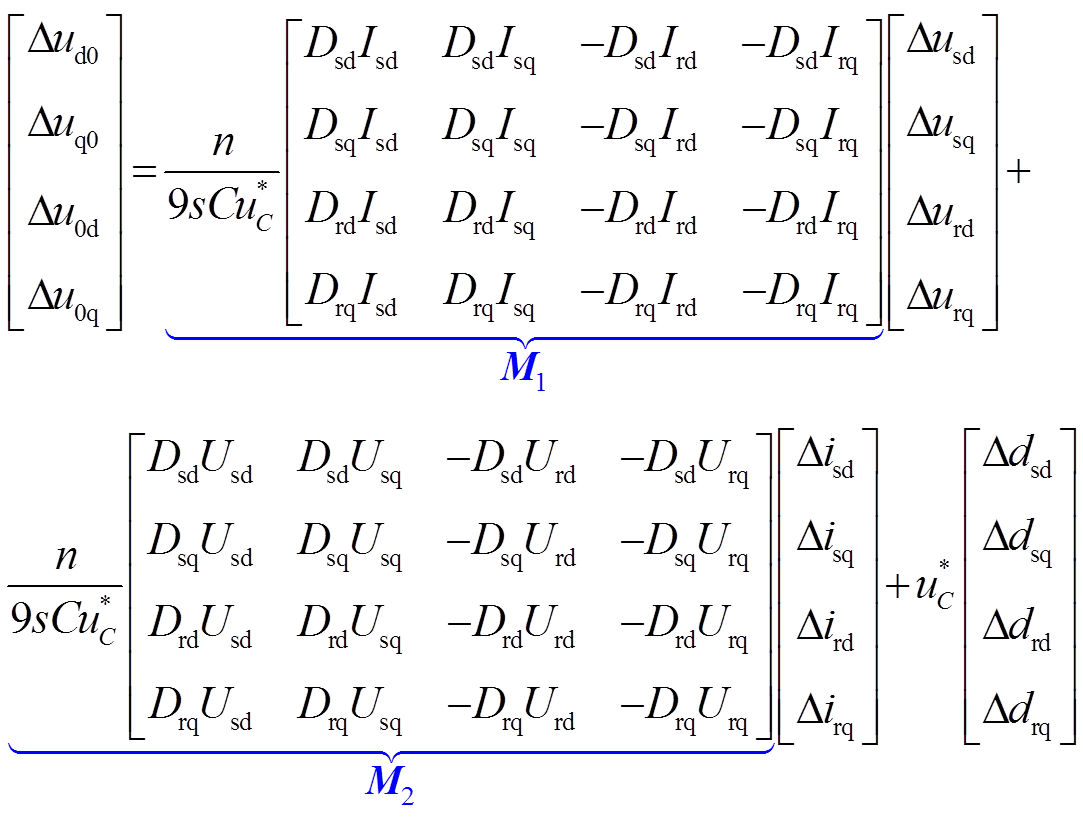
四端口电压和电流为输入和输出的M3C小信号框图如图3所示。桥臂电容电压受两侧功率影响,与电容电压相关的M1、M2、Gvu和Gcu都体现了低频与工频侧的耦合关系,即红色虚线标注部分。值得强调的是,在涉及耦合的矩阵传递函数中,各元素分母均包含子模块电容C。随着C的增大,各相关元素数值减小,M3C低频与工频侧的耦合强度会进一步减弱。
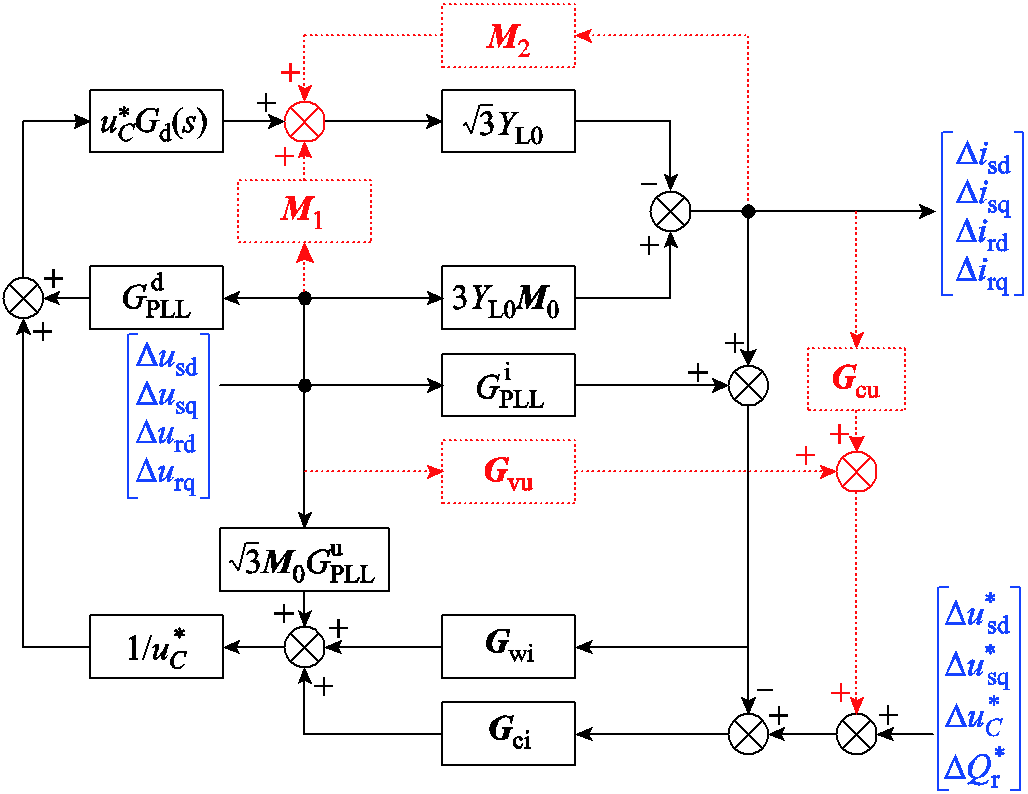
图3 M3C四端口小信号框图
Fig.3 Block diagram of M3C four-port small-signal model
根据图3,四端口导纳YM3C可表示为
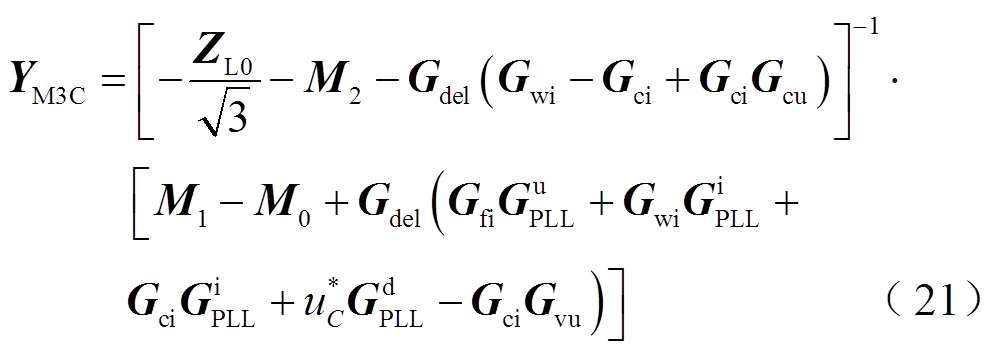
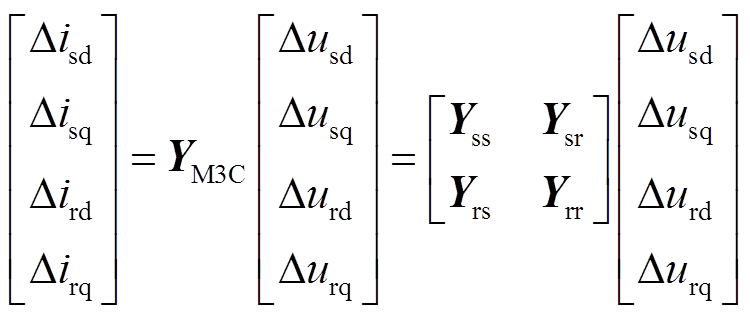
从而,M3C低频和工频侧dq轴端口电压电流满足
 (22)
(22)
式中,Yss和Yrr分别为低频侧和工频侧dq轴端口的自导纳;Ysr为工频侧对低频侧的耦合导纳;Yrs为低频侧对工频侧的耦合导纳。
完整描述低频侧、工频侧特性以及两侧耦合特性,YM3C整体形式会较为复杂。为高效准确地探究参数影响稳定性的主导规律,在实施降阶处理时重点关注了模型精度和复杂度之间的平衡,尤其是较高频段的模型一致性。考虑到d轴与q轴的耦合导纳远小于自导纳,为便于振荡机理分析及后续附加控制策略的推导,在保持d轴与q轴端口自导纳基本不变的前提下,使用直接截断法对YM3C进行降阶处理。由于YM3C是4×4传递函数矩阵,为综合降阶对各元素幅相特性的影响,选用曼哈顿距离来度量降阶前后四端口导纳矩阵的差异,具体降阶步骤如下:
1)确定处理频段及频率采样点数N,选择图3中拟简化的目标传递函数矩阵,对目标传递函数矩阵第m个元素hm进行判定。
2)计算元素hm删去前、后端口导纳的平均曼哈顿距离δ,其中第k个频率采样点的曼哈顿距离用δk表示,将所有δk取平均并进行归一化处理得到 ,δk和的计算方式为
,δk和的计算方式为
 (23)
(23)
 (24)
(24)
式中,Yk和 分别为在第k个频率采样点降阶前后的四端口导纳矩阵。
分别为在第k个频率采样点降阶前后的四端口导纳矩阵。
3)若小于最大允许阈值,则所对应元素hm置0,否则hm保留。若目标传递函数矩阵中还有元素未判定,则返回步骤1);若判定完毕,则输出简化后的目标传递函数矩阵及四端口导纳。
考虑到低频与工频侧耦合会大幅增加导纳矩阵的复杂度,选择M1、M2、Gvu和Gcu为降阶的目标矩阵。所选频段为100~5 000 Hz,设N为500,最大允许阈值为0.2。按上述步骤实施后,M1和M2可完全忽略,Gvu和Gcu忽略Gvu(3,2)、Gvu(3,4)、Gcu(3,2)、Gcu(3,4)。该结果也说明,M3C低频与工频侧耦合性不强,M3C桥臂电容对低频与工频系统存在隔离作用。
为了直观展示降阶结果,对M3C低频侧和工频侧端口导纳进行扫频验证,其中低频侧端口扫频时M3C工频侧接理想电压源,工频侧端口扫频时M3C低频侧接理想电流源,则两种情况下阻抗的解析结果分别为: 和
和 。以红色圆点扫频结果为参照,图4对比了
。以红色圆点扫频结果为参照,图4对比了 和
和 降阶前、后的幅相特性,其中蓝色实线和绿色虚线分别为降阶前和降阶后导纳。图中
降阶前、后的幅相特性,其中蓝色实线和绿色虚线分别为降阶前和降阶后导纳。图中 和
和 分别表示的d轴和q轴自导纳,
分别表示的d轴和q轴自导纳, 表示的q轴对d轴耦合导纳,
表示的q轴对d轴耦合导纳, 则表示的d轴对q轴耦合导纳。对于及后文其他导纳、阻抗矩阵,同样采用类似的定义。降阶后和的d轴与q轴自导纳基本维持不变,而dq耦合导纳仅低频侧发生了一定偏移,保留了主导特性。基于上述降阶和解耦处理,可得简化后M3C小信号模型,如图5所示。
则表示的d轴对q轴耦合导纳。对于及后文其他导纳、阻抗矩阵,同样采用类似的定义。降阶后和的d轴与q轴自导纳基本维持不变,而dq耦合导纳仅低频侧发生了一定偏移,保留了主导特性。基于上述降阶和解耦处理,可得简化后M3C小信号模型,如图5所示。
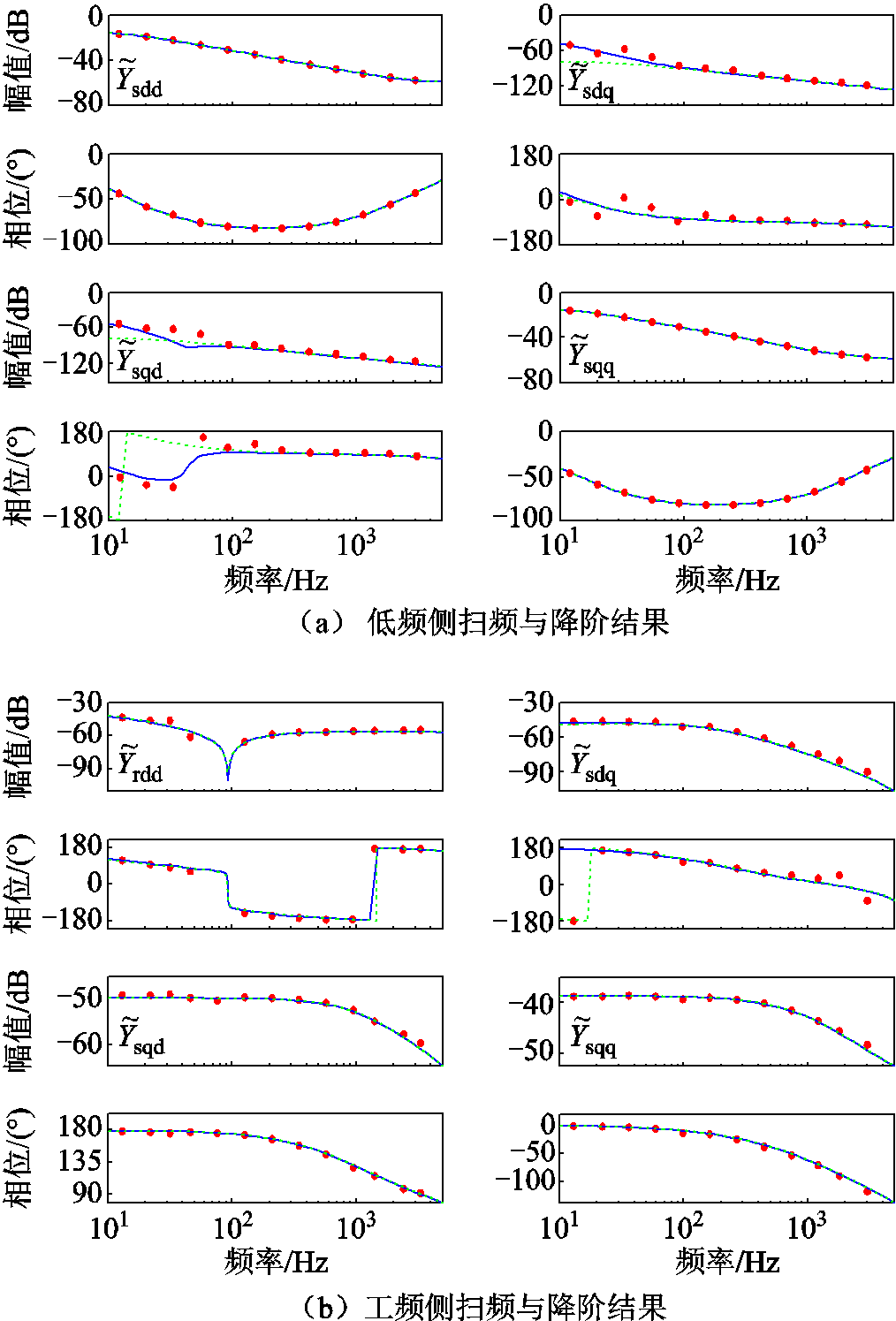
图4 低频侧和工频侧端口导纳扫频及降阶结果
Fig.4 Low-frequency and power-frequency port admittance sweep and reduction results
以M3C为分界,海上风电低频送出系统的振荡与潜在失稳现象包括M3C与低频系统交互引发的振荡失稳、M3C与工频系统交互引发的振荡失稳。在较远距离传输下,风电场侧阻抗高频段由低频海缆主导,与M3C阻抗的不匹配易引发低频侧高频振荡;工频侧的振荡诱因则与MMC或者VSC并网稳定性问题类似,会受电网强弱条件、锁相环参数直接影响。
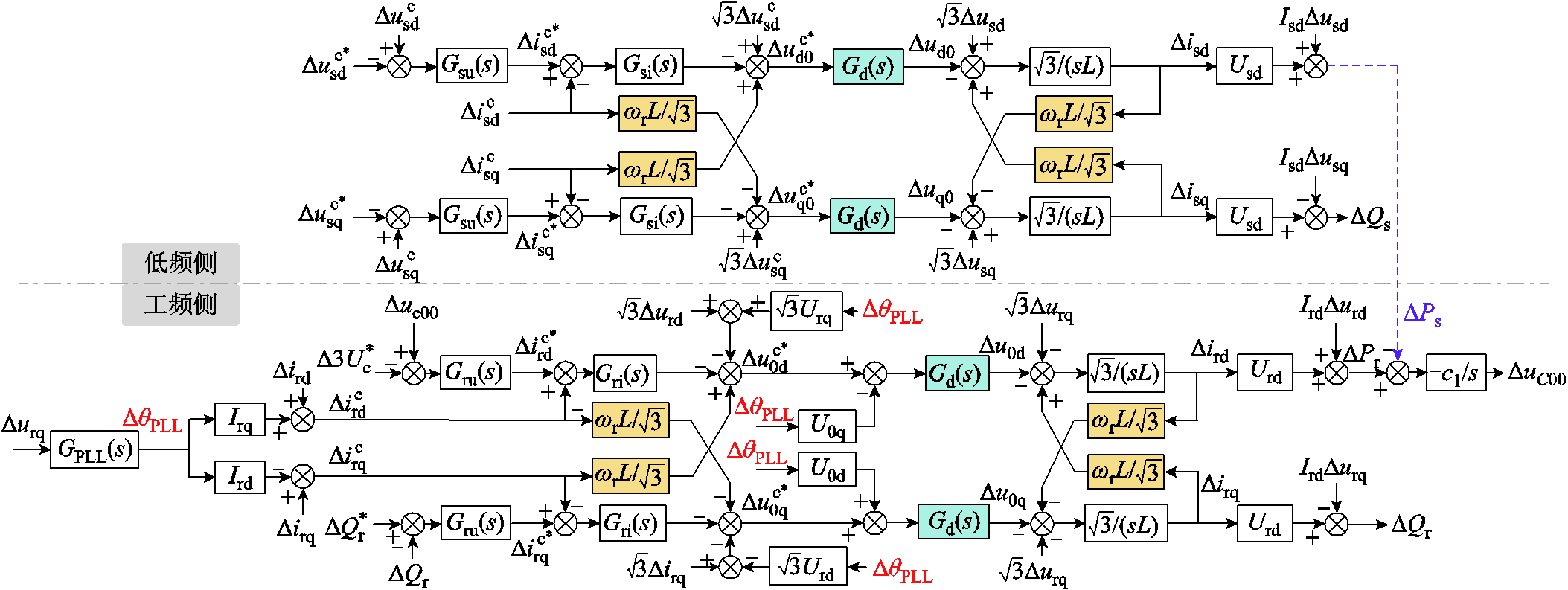
图5 M3C小信号模型
Fig.5 Small-signal model of M3C
海上风电低频送出系统的等效电路如图6所示。Zw为风电场单机等值输出阻抗,Lt、Ct分别为M3C低频侧隔离降压变压器漏感、杂散电容,海上风电场离岸距离一般在50~200 km范围内,对低频海缆每10 km采用一个p型等效电路,Lm、Rm、Cm为等值参数,np为等效电路个数。由图6b,记海上风电场与低频汇集、送出海缆集成后的输出阻抗和等效电流源分别为Zp和ip,M3C低频侧输入导纳为Ys,考虑工频电网阻抗Zg并结合式(22)可得 ,则低频侧端口电压为
,则低频侧端口电压为
 (25)
(25)
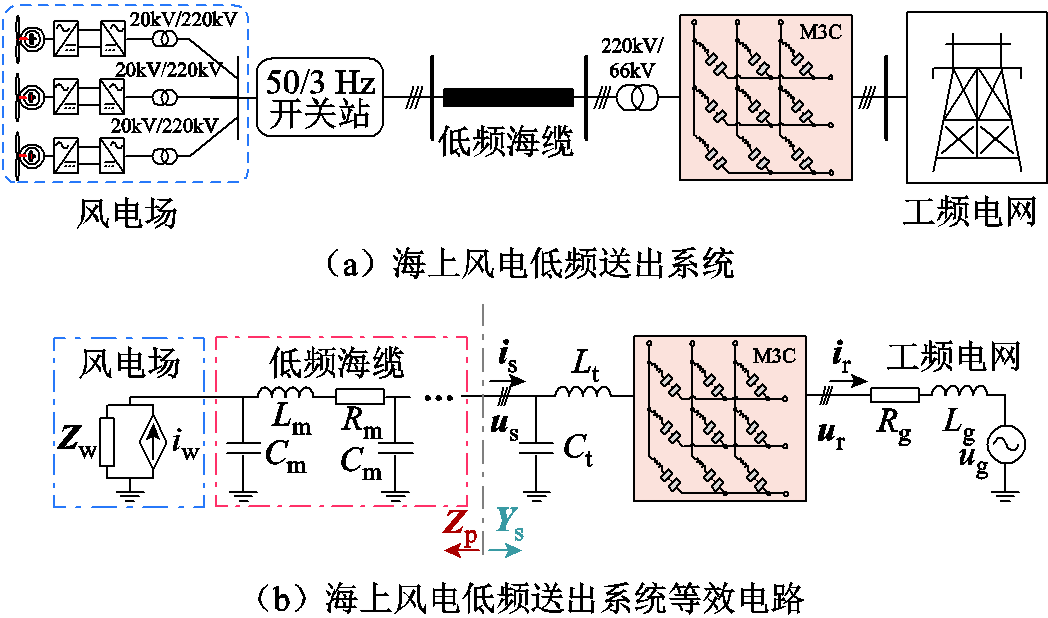
图6 海上风电低频送出系统及等效电路
Fig.6 Equivalent circuit of low-frequency sea breeze transmission system
由式(25),可定义低频侧回比矩阵Ls=YsZp,假设M3C与风电场单独运行时是稳定的,则根据广义奈奎斯特判据,Ls的特征值曲线是否环绕(-1,0)点可用于判断低频系统的稳定性[21]。由于Zs与Zp的耦合阻抗远小于自阻抗,Ls可按式(26)所示作近似处理,将特征值轨迹回归到阻抗交截关系,即直接利用d轴与q轴幅相特性来分析主导的失稳机理。
 (26)
(26)
对于图6所示海上风电低频送出系统,除考虑风电场输出阻抗Zw外,低频海缆是另一个重要影响因素,主要改变风电场侧阻抗Zp的高频段。因此,以下关于低频侧潜在高频失稳现象的分析将主要围绕低频海缆及M3C展开,基本参数见表1。其中控制周期为M3C主控制器周期,采样周期同样为100 μs,调制加载延时按单位仿真步长设定,则控制延时大于150 μs,与实际工程接近,风电场则采用了单机动态等值。
表1 海上风电低频送出系统参数
Tab.1 Parameters of low-frequency transmission system of offshore wind power
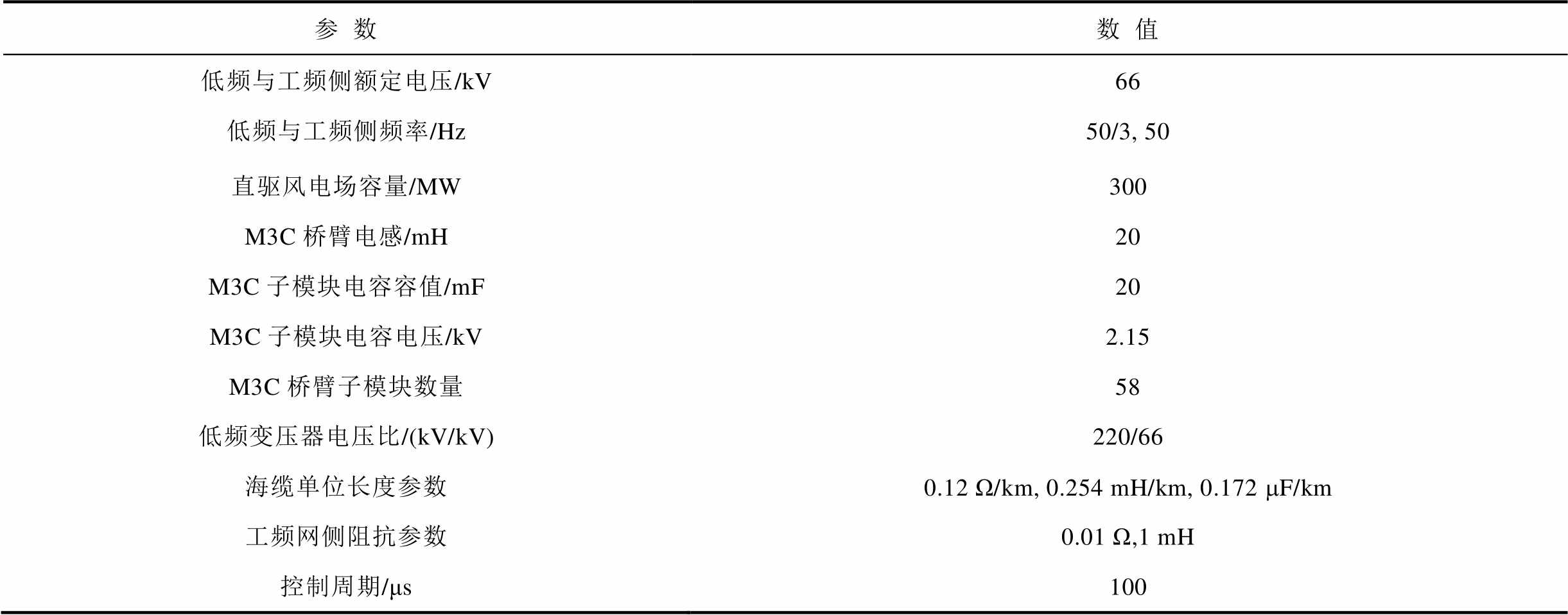
参数数值 低频与工频侧额定电压/kV66 低频与工频侧频率/Hz50/3, 50 直驱风电场容量/MW300 M3C桥臂电感/mH20 M3C子模块电容容值/mF20 M3C子模块电容电压/kV2.15 M3C桥臂子模块数量58 低频变压器电压比/(kV/kV)220/66 海缆单位长度参数0.12 Ω/km, 0.254 mH/km, 0.172 mF/km 工频网侧阻抗参数0.01 Ω,1 mH 控制周期/μs100
1)低频海缆参数对低频侧稳定性影响
为简化分析,首先将M3C低频侧降压变压器视为理想变压器,图7给出了低频海缆100 km时Zp与Zs的d轴与q轴自阻抗。
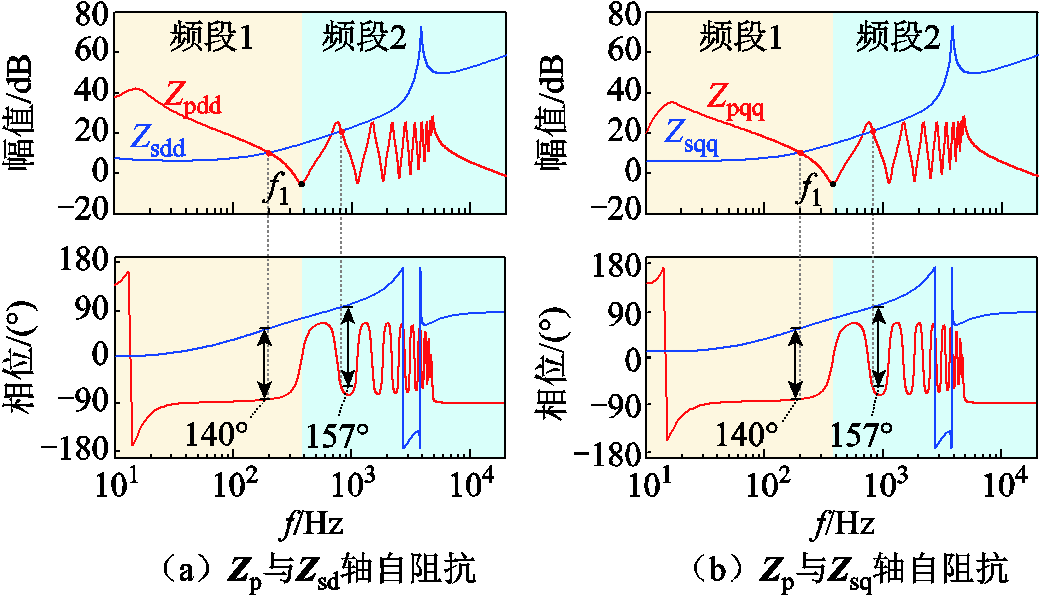
图7 海缆长度100 km时Zp与Zs自阻抗的交截情况
Fig.7 Intersection between the self-impedances of Zp and Zs for submarine cable length of 100 km
由图7可知,由于桥臂电感的作用Zsdd和Zsqq在高频段呈现感性,且在控制系统和延时的共同作用下具有负阻特性;Zpdd和Zpqq由低频海缆引入了2np个谐振尖峰与凹陷,在高频段交替呈现容性和感性,易与Zsdd、Zsqq产生多处幅值交截,存在明显的高频振荡风险。另外根据dq轴自阻抗交截点分布,选择Zpdd或Zpqq第一处凹陷的谐振频率f1作为边界,对阻抗特性进行分频段分析。由于Zsdd与Zsqq具有对称性,而Zpdd与Zpqq在高频段相近,因此后续将主要通过q轴自阻抗进行机理分析。
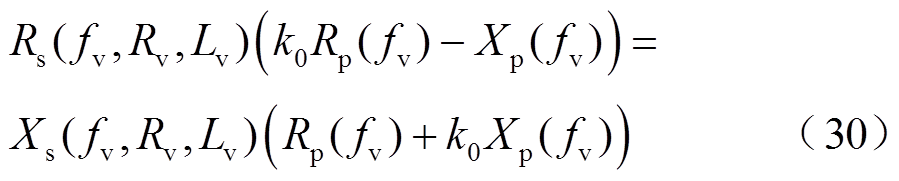
图8给出了不同海缆长度下Zpqq与Zsqq的交截情况。在表1系统参数下,由阻抗交截确定的高频振荡涉及频段大致为200~2 000 Hz,该分布特征受低频海缆参数影响最为直接。当低频海缆为20 km时,频段1中520 Hz处的幅值发生交截,相位差为180°;当低频海缆长度为50 km时,频段2中1 530 Hz处的幅值发生交截,相位差为183°。
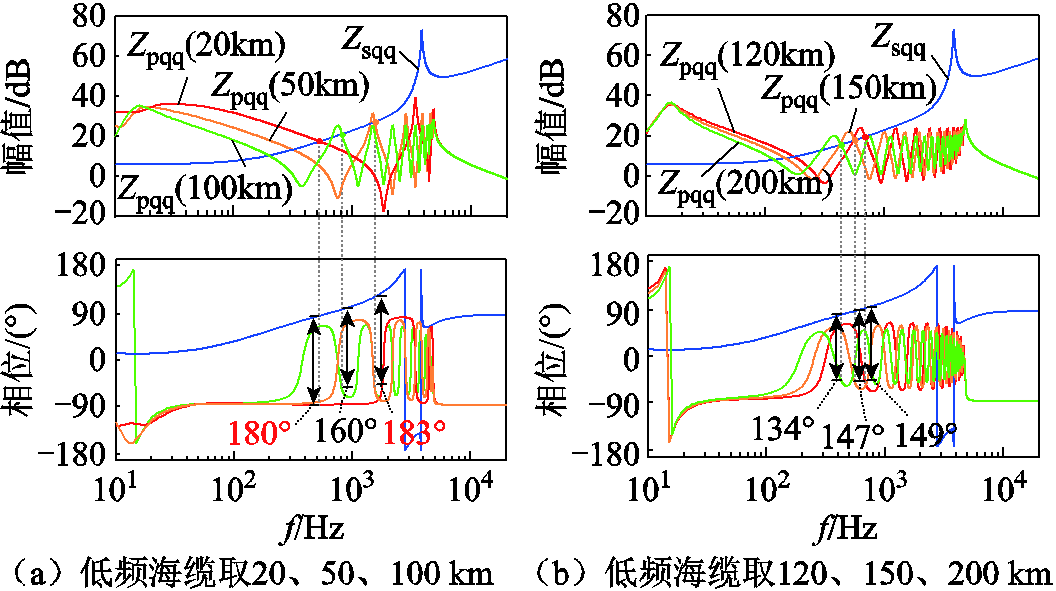
图8 不同海缆长度下Zpqq及其与Zsqq的交截情况
Fig.8 Zpqq and its intersection with Zsqq for different submarine cable lengths
由图8可知,频段1中由Zpqq凹陷引起的阻抗交截难以规避,而频段2中Zpqq尖峰导致的幅值交截可通过抬高M3C阻抗避免。海缆长度增加会使频段1和频段2幅值交截频率前移,相应的Zsqq相位下降,相位裕度增大,不易发生高频振荡。因此,仅就高频振荡而言,低频输电系统对于远海风电送出场景具有较明显优势。
2)M3C参数对低频侧稳定性影响
类似于低频海缆对Zp的影响,M3C桥臂电感、变压器参数、控制参数等也会改变Zs的高频特性。考虑变压器漏感Lt及杂散电容Ct,对Zs重新求解,图9a和图9b分别给出了M3C不同桥臂电感及不同变压器漏感下的Zsqq及与Zpqq的交截情况。选取较大的桥臂电感L及变压器漏感Lt均会提高频段2的相位裕度,甚至避免频段2的幅值交截;而L减小则会降低Zpqq的幅值,如减小至10 mH时会导致幅值交截转移到频段2第二个谐振峰,即在1 560 Hz处相位裕度不足引发高频振荡。
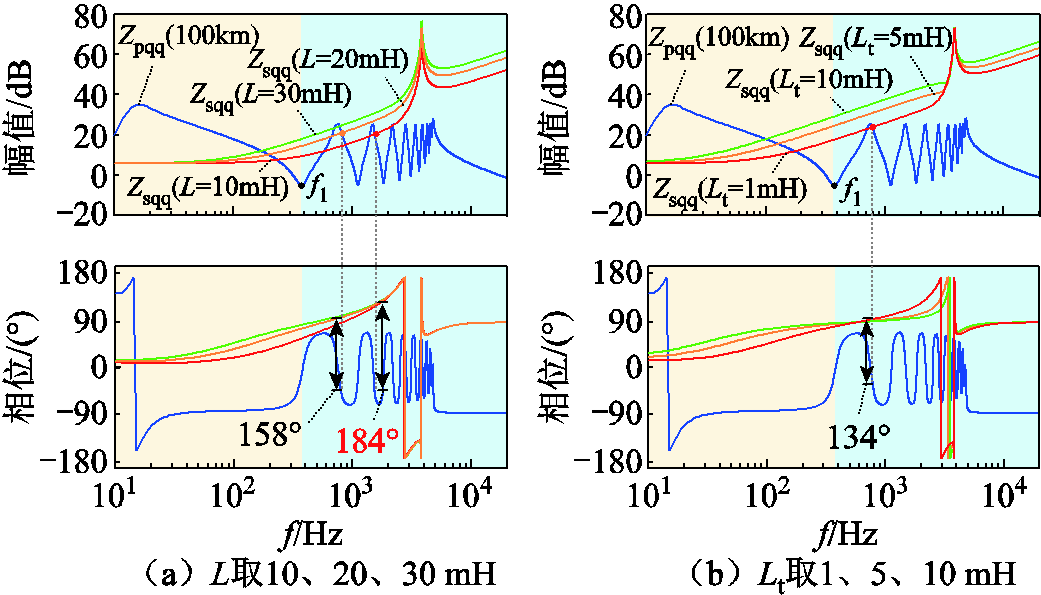
图9 不同桥臂电感及变压器漏感下Zsqq及其与Zpqq交截情况
Fig.9 Zsqq and its intersection with Zpqq under different arm inductance and transformer leakage inductance
在M3C控制参数中,内环与外环PI的比例系数对高频阻抗特性影响较大[22]。图10a和图10b分别绘制了M3C低频侧不同内环及外环比例系数下Zpqq与Zsqq。内、外环比例系数增大均会导致频段2中第二个谐振峰幅值交截处的相位裕度不足,而内、外环比例系数减小则有助于避免频段2中的幅值交截,因此适当调节内、外环比例系数有利于抑制高频振荡。需要强调的是,减小内环比例系数会使得Zsqq在频段1幅值交截附近相位抬升,而调节外环比例系数并不会对频段1的相位产生较大影响。因此,为了避免在频段1中的不利影响,可优先调节外环比例系数来规避频段2中的幅值交截。此外,通过调整PI控制器参数来提高系统稳定性,会不同程度地牺牲M3C的并网性能,对于结构性失稳现象,调整要求会极高,改变物理参数的优化效果会更为显著。
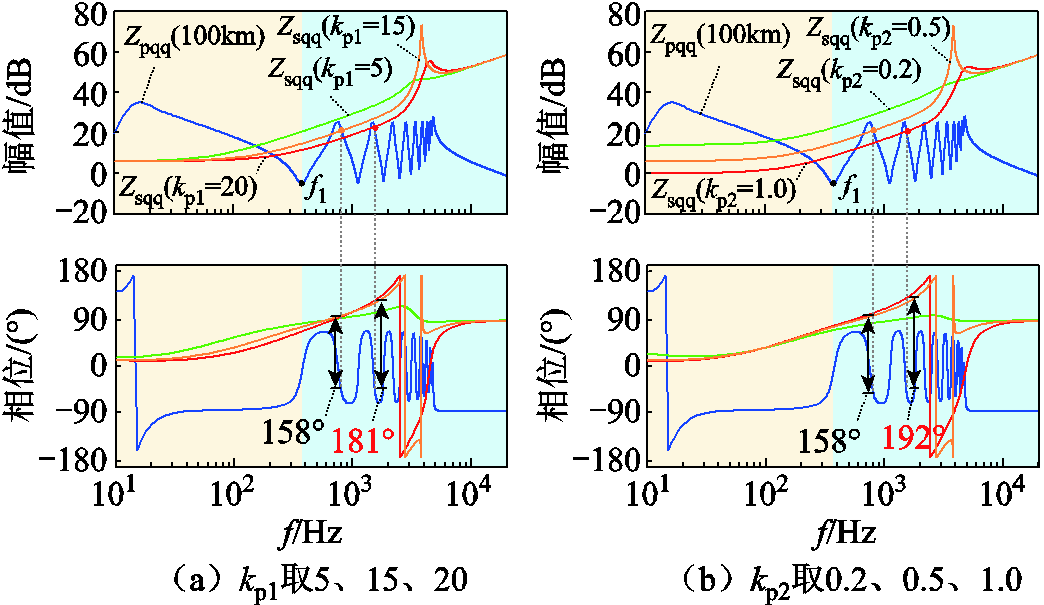
图10 不同控制参数下Zsqq及其与Zpqq的交截情况
Fig.10 Zsqq and its intersection with Zpqq under different control parameters
图11进一步对比了M3C控制周期为100 μs和150 μs的Zsqq。控制周期的增加会抬升Zsqq相位,且随低频海缆长度的增加,对该阻抗交截的影响会从频段1转移至频段2。海缆长度20 km时,控制周期增大至150 μs,使得频段1幅值交截点相位裕度减少,而在海缆长度100 km时则使得原本稳定的系统在频段2发生高频振荡。需要注意的是,控制周期的增加会使得系统高频振荡问题更加突出,但并不会引起幅值交截分布特征的改变。
结合上述分析,本文进一步对比了海上风电低频送出系统与柔直送出系统的高频振荡特征,具体可见附表1。
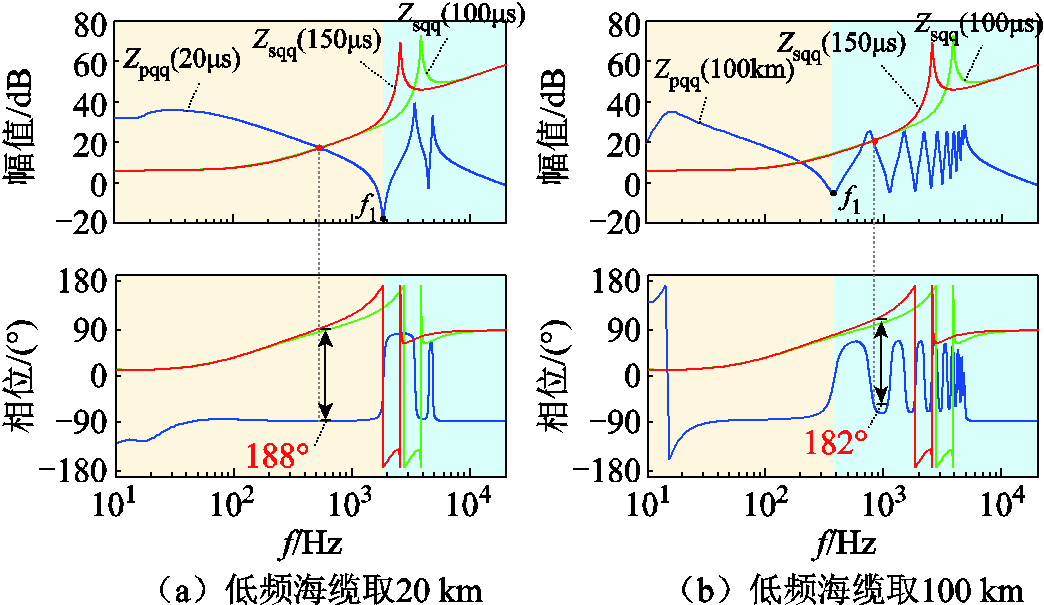
图11 不同控制周期下Zsqq及其与Zpqq交截情况
Fig.11 Zsqq and its intersection with Zpqq under different control period
出于经济性考虑,通过附加控制改变M3C外特性是抑制高频振荡的有效手段之一。出于交截频率和相位裕度的调整,附加控制策略须具备灵活的幅值和相位调节能力。频段1中Zs呈阻感性,在M3C低频侧输入端口串联电阻可降低Zs相位,频段2则可通过增大桥臂电感避免幅值交截。附加控制策略在物理意义上可统一为桥臂串联虚拟阻感支路。
由图5简化小信号模型,图12给出了串联虚拟阻感支路的控制实现过程。虚拟阻感支路由原桥臂电感串联实际阻感拆分而来,并将其反馈点前移至内环。完整考虑延时环节Gd(s)会在补偿器中引入高次微分项。为降低实现难度,补偿器可简化为
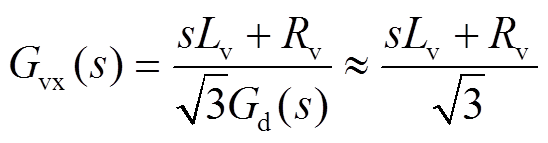 (27)
(27)
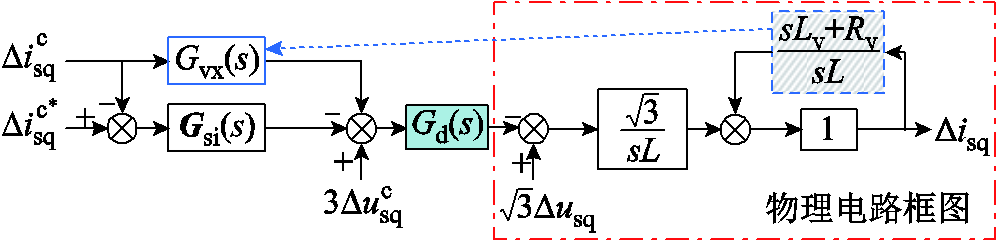
图12 串联虚拟阻感的控制实现
Fig.12 Implementation of virtual resistor-inductor in series
对于dq轴均完整配置补偿器,定义对角矩阵Gv=diag{Gvx(s), Gvx(s), 0, 0},可得式(28)所示附加控制后的M3C四端口阻抗,相应地可求解M3C低频侧输入阻抗Zs。
 (28)
(28)
对于频段1与频段2涉及的振荡现象,均可通过相位补偿进行虚拟阻感参数设计、图13a以频段1为例给出了参数设计示意图。记Zsqq=Rs+jXs,Zpqq=Rp+jXp,定义q0为加入虚拟阻感后需要满足的相位裕度,fv为附加控制后待确定的Zpqq与Zsqq幅值交截频率,则虚拟阻感参数应满足
 (29)
(29)
式中,k0=tan(180°-q0)。
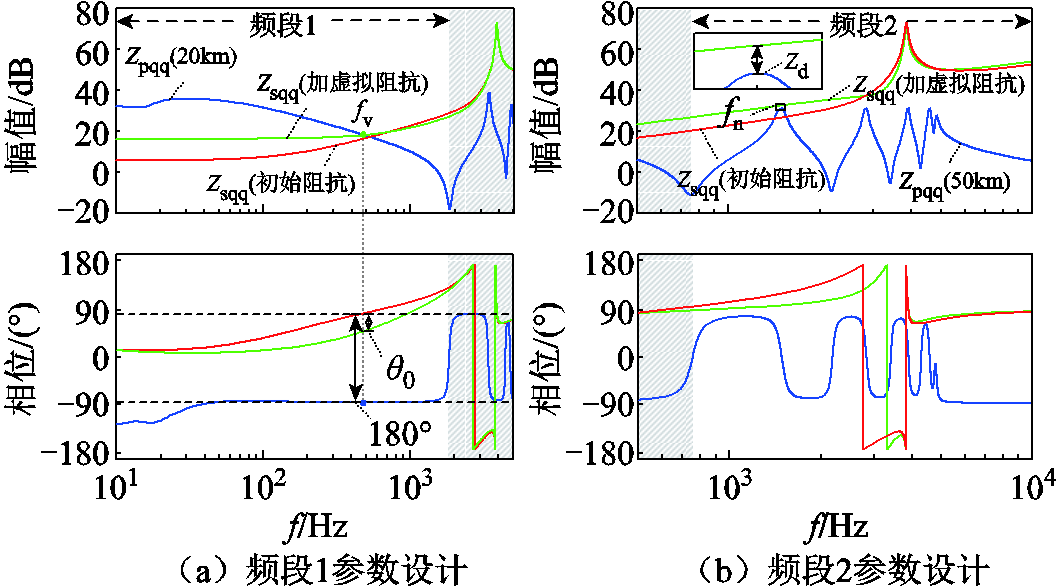
图13 虚拟阻感参数设计示意图
Fig.13 Design schematic diagram of virtual inductance and resistance parameters
由式(29)和式(30)求解Rv、Lv和fv,得到的是虚拟阻感支路的多个可行解。为使得附加控制后Zs的变化尽可能小,降低对M3C响应特性的不利影响,可使用前述曼哈顿距离表征变化程度,即引入式(31)作为约束条件获得虚拟阻感支路Rv和Lv的最优解。
 (31)
(31)
需要指出,对于频段2涉及的振荡现象及参数设计,可直接按避免幅值交截进行设计,即设定一定幅值裕度Zd,具体如图13b所示。与考虑相位裕度的设计相比,按幅频特性曲线避免交截的设计结果较为保守,对输出性能的影响也更为突出。
按风电场单一工况输出阻抗进行M3C附加控制参数设计,相位裕度的选取直接影响附加控制的适用性,过小则难以兼顾风电场不同运行工况的高频振荡抑制要求,过大则易导致较差的M3C响应特性。为模拟风电场工况对系统稳定性的影响,将风电场单机等值模型拓展为多机等值模型(5台等值机,总容量不变),以50 km送出海缆和5条10 km汇集海缆构成送出网络为例,图14给出了风电场等值机投入1~5台时风电场阻抗Zpqq的分布情况。对Zpqq引入区间描述,记幅值上界和下界分别为Apqq+(f)、Apqq-(f),相位上、下界为θpqq+(f)、θpqq-(f),则当Zpqq涉及红色阴影区域时,附加控制策略存在失效的风险。
图14 考虑Zpqq分布范围的阻抗交截情况
Fig.14 Impedance intersections considering the distribution range of Zpqq
为保证M3C附加控制在Zpqq整个分布范围均能实现高频振荡抑制效果,可选用充分而不必要的稳定性约束,即在Zsqq与Zpqq分布范围的幅值交截频段(f1, f2)内,Zsqq相位θsqq(f)与Zpqq相位下边界θpqq-(f)构成的最大可能相位差Δqmax(f)应满足
 (32)
(32)
式中, 为最大可能相位差处的频率。
为最大可能相位差处的频率。
为了降低参数计算的复杂度,不再完整设计虚拟阻感支路,即在关注频段内仅考虑对相位影响更灵敏的虚拟电阻或虚拟电感参数配置。定义Zsqq对Rv和Lv的相位灵敏度分别为Sq,Rv(f)和Sq,Lv(f),理论表达式为
 (33)
(33)
式中,a=Rv, Lv; ;
;
 。
。
若Δqmax超过180°存在振荡风险,则参数a的调节量Δa可按式(34)进行估计。
 (34)
(34)
参数整定后Zpqq与Zsqq幅值交截频段出现变化,仍需考虑对最大可能相位差Δqmax是否小于180°进行再次校验,参数设计流程如图15所示。
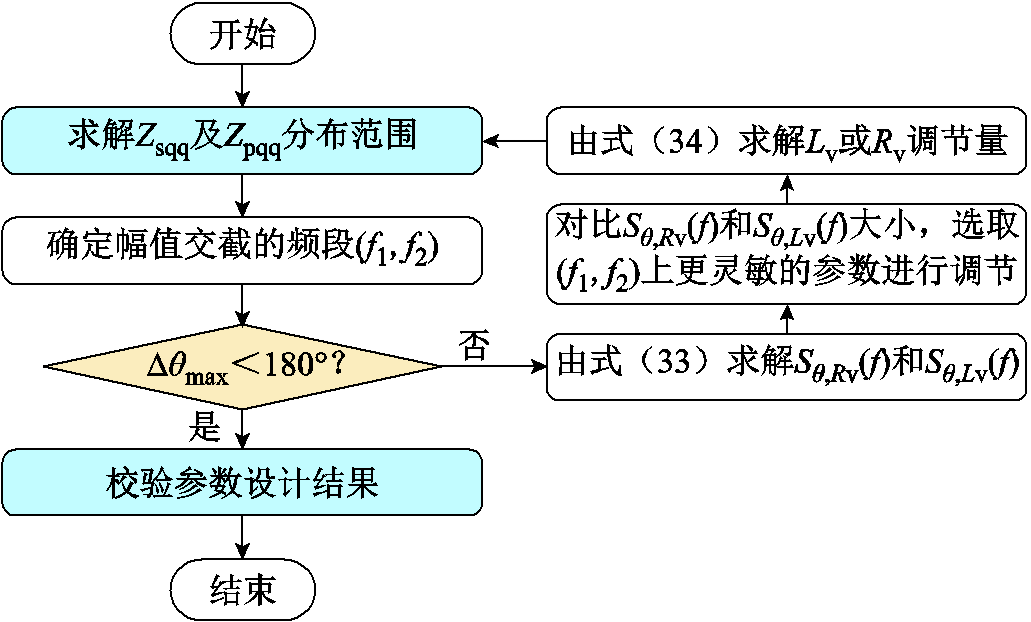
图15 参数设计流程
Fig.15 Process diagram for parameter design
基于Matlab/Simulink仿真平台搭建了采用单机等值的300 MW海上风电低频送出系统仿真模型,系统参数见表1。由3.1节分析可知,控制周期为100 μs而海缆长度分别为20 km和50 km时在频段1和频段2存在高频振荡。图16和图17分别给出了海缆长度20 km和50 km时M3C低频侧电流仿真波形及频谱结果,两种低频海缆配置下在520 Hz和1 530 Hz附近发生了高频振荡,与图8所示阻抗分析结果一致。
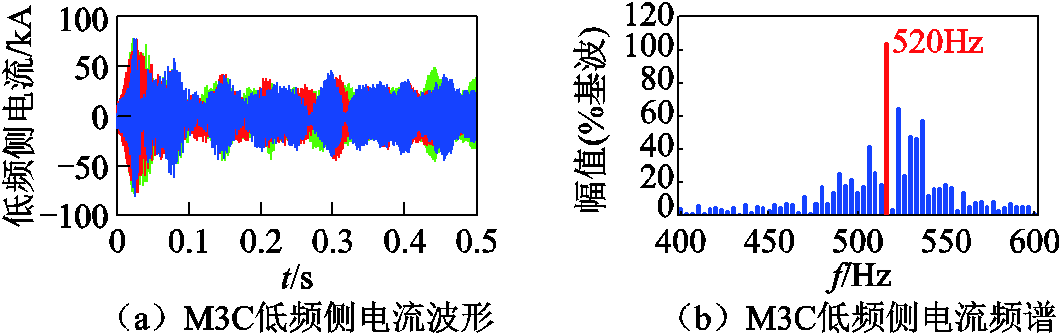
图16 海缆长度20km时M3C低频侧的电流波形及频谱
Fig.16 Low-frequency side current waveform and spectrum of M3C at the submarine cable length of 20km
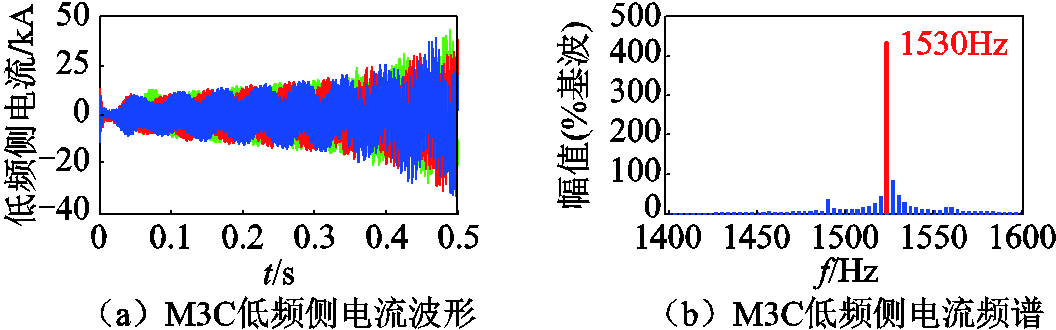
图17 海缆长度50 km时M3C低频侧的电流波形及频谱
Fig.17 Low-frequency side current waveform and spectrum of M3C at the submarine cable length of 50 km
针对上述两种高频振荡工况,分别进行附加控制策略的配置及参数设计。海缆长度为20 km时,取 为20°,求解式(29)、式(30)可得满足相位要求的虚拟阻感参数的可行域如图18a所示。海缆长度为50 km时,以避免交截进行参数设计,取Zd为2 dB可得虚拟阻感参数的可行域如图18b所示。图18a和图18b中z轴标注了采用不同虚拟阻感的
为20°,求解式(29)、式(30)可得满足相位要求的虚拟阻感参数的可行域如图18a所示。海缆长度为50 km时,以避免交截进行参数设计,取Zd为2 dB可得虚拟阻感参数的可行域如图18b所示。图18a和图18b中z轴标注了采用不同虚拟阻感的 ,工况1取Rv=21 Ω时最小,工况2取Lv=24 mH时最小。这是因为通过附加虚拟电阻降低Zs在频段1的相位达到所需相位裕度引起的Zs变化更小;而频段2通过抬升Zs幅值避免交截,且该频段频率更高,采用虚拟电感更易实现。
,工况1取Rv=21 Ω时最小,工况2取Lv=24 mH时最小。这是因为通过附加虚拟电阻降低Zs在频段1的相位达到所需相位裕度引起的Zs变化更小;而频段2通过抬升Zs幅值避免交截,且该频段频率更高,采用虚拟电感更易实现。

图18 虚拟阻感参数的可行域
Fig.18 Feasible range of virtual inductance and resistance
根据设计的虚拟阻感参数,图19a和图19b分别展示了两种工况附加控制后Zsqq及其与Zpqq的交截情况,图20给出了时域仿真波形。配置附加控制策略使得系统稳定,在1.5 s增加50 MW送出功率能够快速进入稳态,动态特性仍满足工程需求。
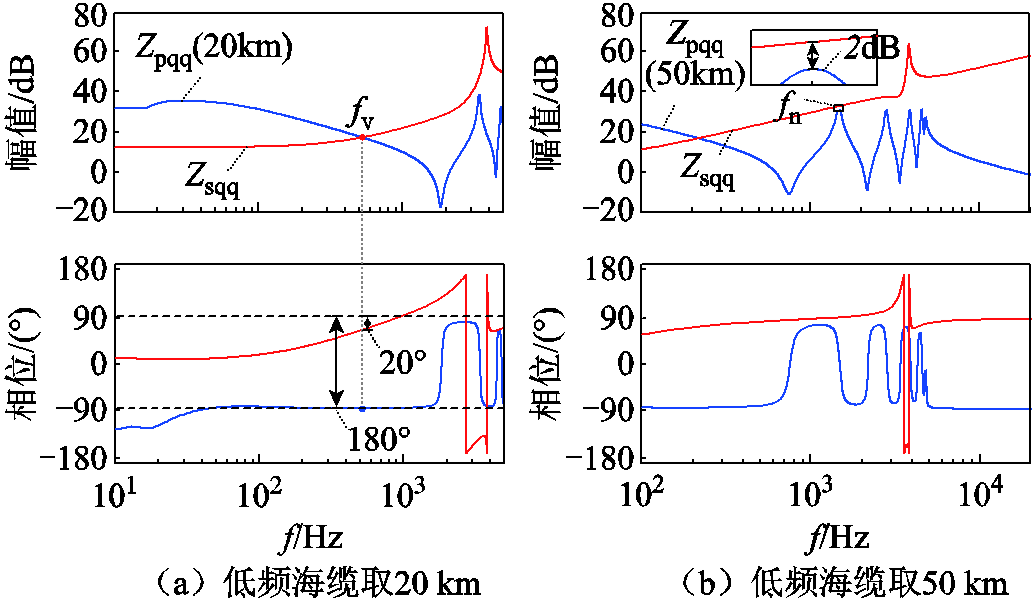
图19 附加控制后Zsqq及其与Zpqq的交截情况
Fig.19 Zsqq and its intersection with Zpqqunder additional control
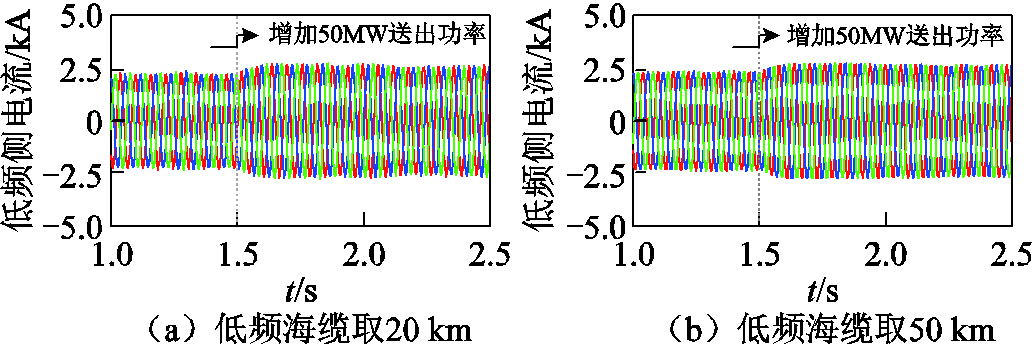
图20 附加控制后M3C低频侧电流波形
Fig.20 Low-frequency side current waveform under additional control
对于控制延时增加引起的高频振荡,同样配置所提附加控制策略,参数计算过程不再重复。由图11可知,控制周期为150 μs、海缆长度为100 km时系统失稳,配置附加控制(Lv=20 mH)后,时域仿真波形如图21所示。可知所提附加控制策略对控制延时引发的高频振荡现象同样具备抑制作用。
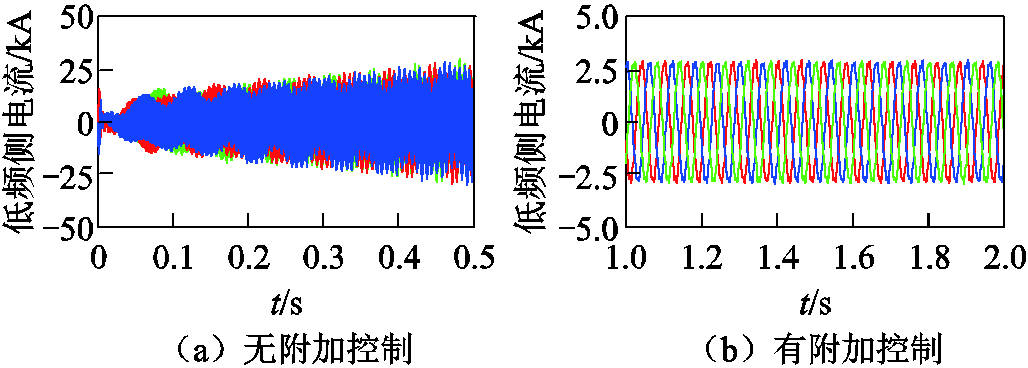
图21 附加控制前后M3C低频侧电流波形
Fig.21 Low-frequency side current waveform with and without additional control
以含5台等值风机的海上风电低频送出系统进行验证,考虑风机投入数量由1~5台变化导致对Zpqq的宽范围分布。图22展示了Sq,Rv(f)和Sq,Lv(f)绝对值轨迹,在幅值交截频段内θsqq(f)对Lv更灵敏,因此附加控制策略将优先配置虚拟电感支路。
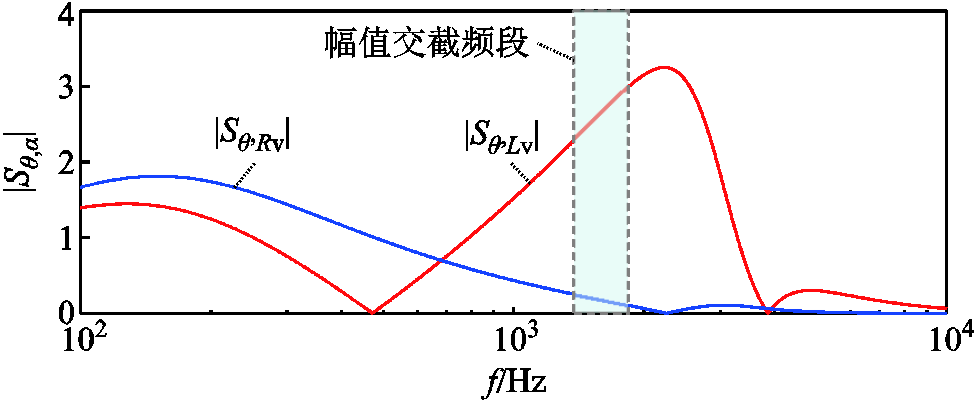
图22 Sq,Rv(f)和Sq,Lv(f)的绝对值轨迹
Fig.22 The absolute value trajectory of Sq,Rv(f) and Sq,Lv(f)
若不考虑Zpqq变化,以1台风机投入进行参数设计,相位裕度取5°时,由式(29)和式(30)可得Lv=2 mH。若考虑1~5台等值风机不同投入情况导致的Zpqq分布范围,由式(33)和式(34)可得Lv取值应为8 mH。图23对设计结果进行了对比,当风机投入数量由1台变为4台,考虑Zpqq阻抗分布范围设计的Lv=8 mH仍然有效,相位裕度为20°,而采用单一工况设计的Lv=2 mH则无法满足稳定性要求。
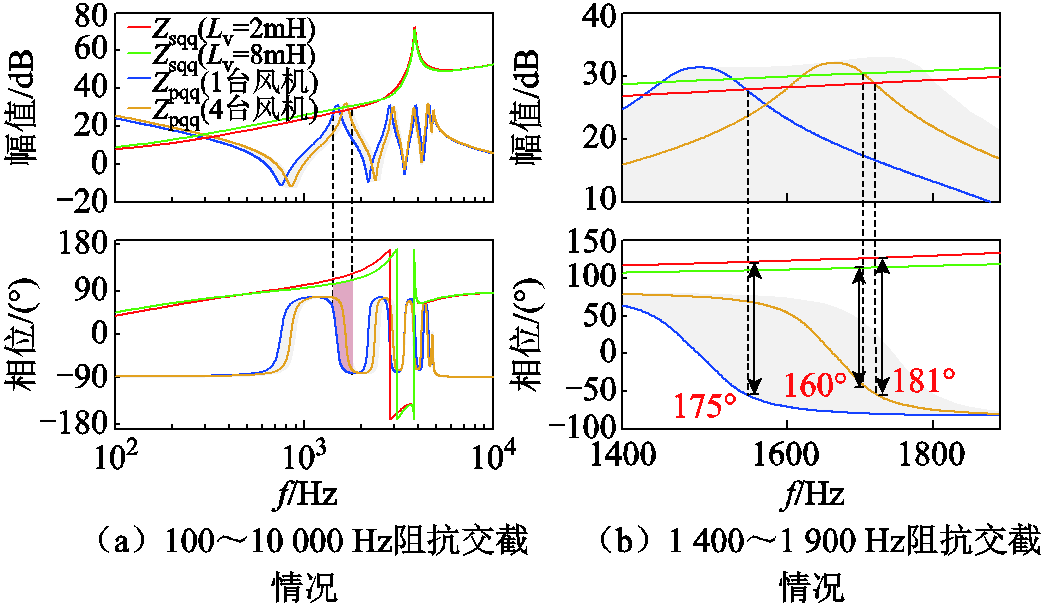
图23 不同Lv及风机投入数量下Zsqq与Zpqq的交截情况
Fig.23 Impedance intersection situation with different Lv and wind turbines in operation
图24给出了风机投入数量为4台时低频侧电流的仿真波形,附加控制中Lv分别为2 mH和8 mH。Lv为2 mH时系统发生了高频振荡,而Lv为8 mH时系统稳定。因此,就附加控制的鲁棒性而言,参数设计应考虑风电场阻抗的宽范围分布和变化特征。
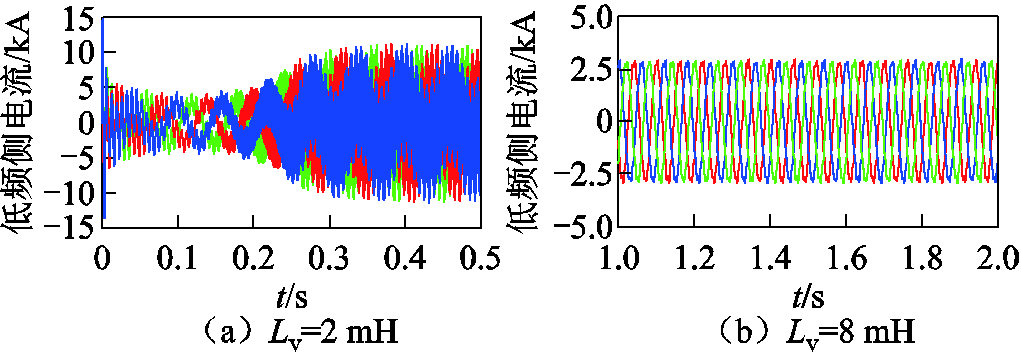
图24 不同Lv取值下M3C低频侧电流波形
Fig.24 Low-frequency side current waveforms with different Lv
4.1节中按避免阻抗幅值交截设计所得Lv为 24 mH,在4台风机投入时系统仍保持稳定,仿真波形如图25a所示。图25b展示了配置不同Lv时低频侧电压指令阶跃的响应特性,虽然Lv=8 mH或 24 mH均能使得M3C在风电场阻抗宽范围变化时保持稳定,但Lv=24 mH时系统响应速度变慢且超调量增大,因此虚拟阻感参数的设计应尽可能结合风电场阻抗分布特征。如果需要进一步通过虚拟阻抗覆盖尽可能多的高频振荡模式,本质是强化系统稳定裕度,则容易导致系统正常调控特性的削弱。
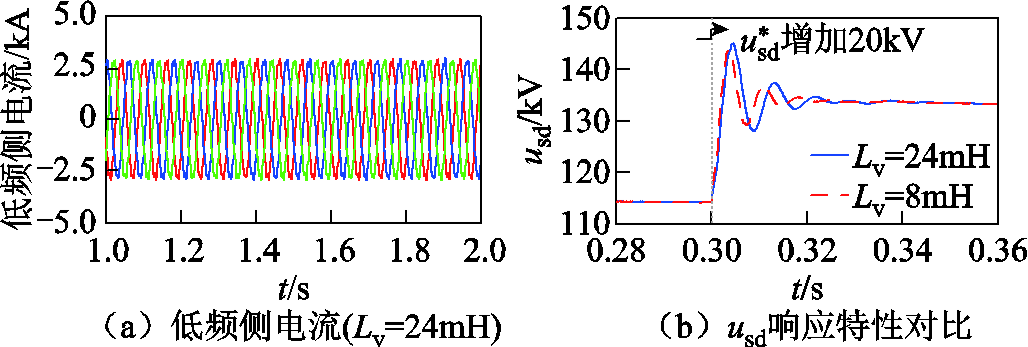
图25 Lv=24 mH时电流波形及电压响应特性对比
Fig.25 Current waveform and comparison of voltage response characteristics when Lv=24 mH
为进一步验证附加控制策略的应用效果,基于远宽MT6020实时仿真平台进行海上风电低频送出系统控制硬件在环实验,如图26所示。图27给出了1台和4台风机投入时附加控制策略不同参数下的低频侧电流波形。Lv=2 mH时,1台等值风机投入系统可保持稳定,但4台风机投入时发生振荡,如图27a所示;Lv=8 mH时,1台和4台风机投入系统均保持稳定,如图27b所示。硬件在环实验结果与前文理论分析及Simulink仿真结果一致,证明了附加控制策略有效性与考虑阻抗区间的参数设计鲁棒性。

图26 控制器硬件在环实时仿真平台
Fig.26 Real-time simulation platform of control hardware-in-the-loop
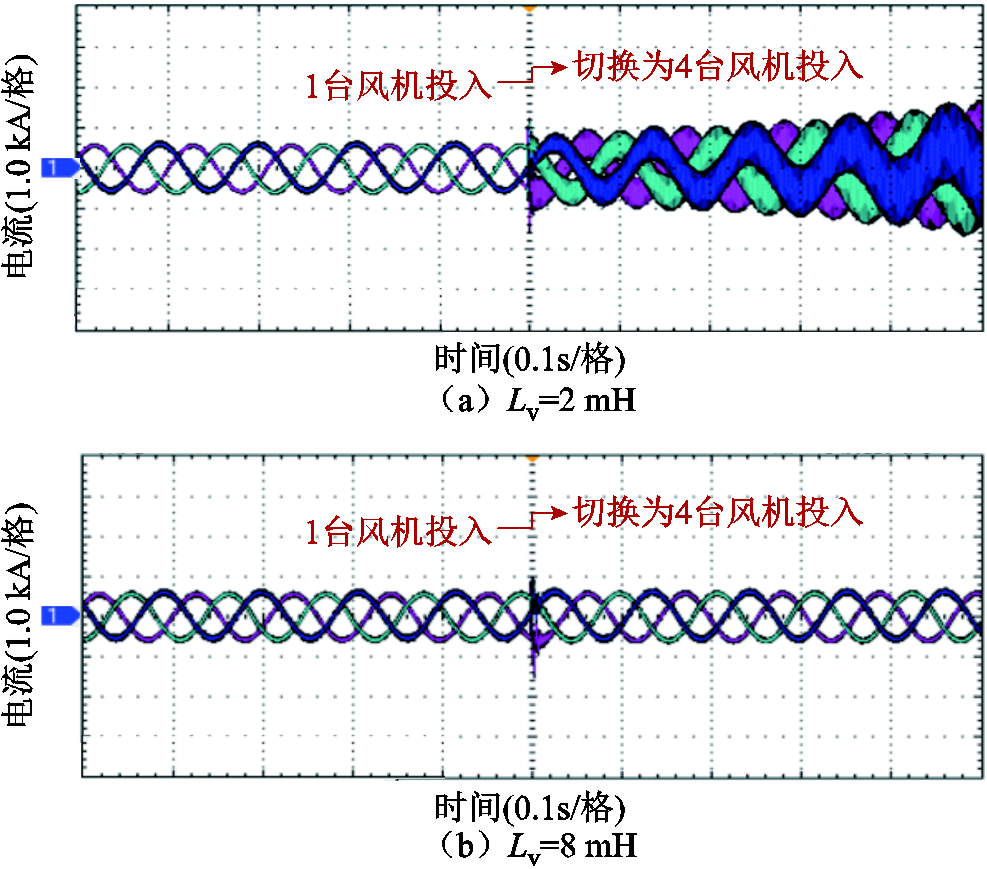
图27 附加控制硬件在环实验验证
Fig.27 Experimental verification of the additional control hardware-in-the-loop
为明晰海上风电低频送出系统的高频振荡机理,本文建立了M3C四端口导纳模型,通过阻抗分析揭示了影响低频侧高频振荡的关键参数,并提出了基于虚拟阻感支路的附加控制策略及考虑风电场阻抗宽范围分布的参数设计方法。结合Matlab/ Simulink时域仿真和控制硬件在环实验,验证了导纳建模、高频振荡机理分析及所提附加控制策略的有效性,主要结论如下:
1)M3C子模块电容的隔离作用使得低频侧与工频侧的耦合较弱,当研究海上风电低频送出系统低频侧或者工频侧稳定性时,可忽略子模块电容引入的部分耦合元素构成降阶导纳模型。
2)低频海缆、M3C桥臂电感、控制参数及控制延时均会对潜在高频振荡现象产生较大影响,且高频振荡的分布特征受低频海缆参数影响最为直接,在低频海缆较短时系统稳定性问题更为突出。
3)针对低频海缆和控制延时作为主要诱因引发的高频振荡,基于虚拟阻感支路的附加控制策略均能实现很好的抑制效果,且参数设计考虑风电场阻抗分布范围,具有更好的鲁棒性。
附 录
附表1 海上风电低频送出系统与柔直送出系统高频振荡特征对比
App.Tab.1 Comparison of high-frequency oscillation characteristics between low-frequency transmission system and flexible direct current transmission system for offshore wind power
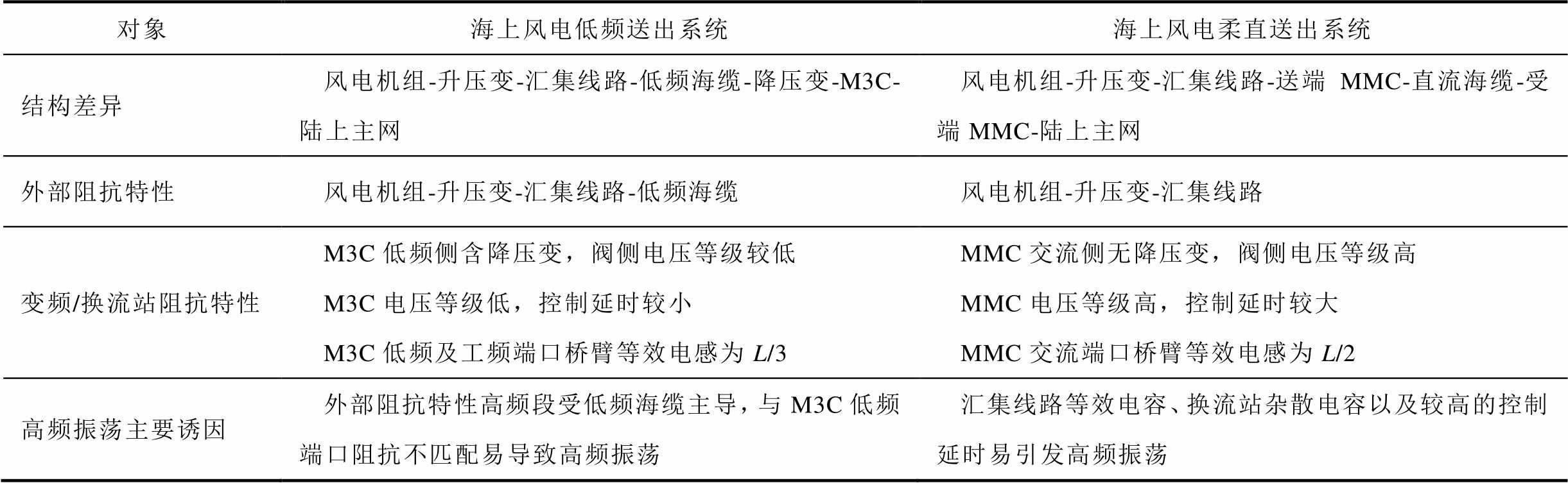
对象海上风电低频送出系统海上风电柔直送出系统 结构差异风电机组-升压变-汇集线路-低频海缆-降压变-M3C-陆上主网风电机组-升压变-汇集线路-送端MMC-直流海缆-受端MMC-陆上主网 外部阻抗特性风电机组-升压变-汇集线路-低频海缆风电机组-升压变-汇集线路 变频/换流站阻抗特性M3C低频侧含降压变,阀侧电压等级较低M3C电压等级低,控制延时较小M3C低频及工频端口桥臂等效电感为L/3MMC交流侧无降压变,阀侧电压等级高MMC电压等级高,控制延时较大MMC交流端口桥臂等效电感为L/2 高频振荡主要诱因外部阻抗特性高频段受低频海缆主导,与M3C低频端口阻抗不匹配易导致高频振荡汇集线路等效电容、换流站杂散电容以及较高的控制延时易引发高频振荡
参考文献
[1] 高仕龙, 陈武, 杨勇, 等. 海上风电柔性低频输电换流器控制策略及试验[J]. 电工技术学报, 2024, 39(增刊1): 77-94. Gao Shilong, Chen Wu, Yang Yong, et al. Control strategy and test of flexible low frequency transmission converter for offshore wind power[J]. Transactions of China Electrotechnical Society, 2024, 39(S1): 77-94.
[2] 王秀丽, 张小亮, 宁联辉, 等. 分频输电在海上风电并网应用中的前景和挑战[J]. 电力工程技术, 2017, 36(1): 15-19. Wang Xiuli, Zhang Xiaoliang, Ning Lianhui, et al. Application prospects and challenges of fractional frequency transmission system in offshore wind power integration[J]. Electric Power Engineering Technology, 2017, 36(1): 15-19.
[3] 黄明煌, 王秀丽, 刘沈全, 等. 分频输电应用于深远海风电并网的技术经济性分析[J]. 电力系统自动化, 2019, 43(5): 167-174. Huang Minghuang, Wang Xiuli, Liu Shenquan, et al. Technical and economic analysis on fractional frequency transmission system for integration of long-distance offshore wind farm[J]. Automation of Electric Power Systems, 2019, 43(5): 167-174.
[4] Luo Jiajie, Lin Kai, Li Jianing, et al. Cost analysis and comparison between modular multilevel converter (MMC) and modular multilevel matrix converter (M3C) for offshore wind power transmission[C]//15th IET International Conference on AC and DC Power Transmission (ACDC 2019), Coventry, UK, 2019: 1-6.
[5] Yu Zheyang, Zhang Zheren, Xu Zheng. Electro-mechanical transient modeling of the low-frequency AC system with modular multilevel matrix converter stations[J]. IEEE Transactions on Power Systems, 2024, 39(1): 921-933.
[6] 蒋晓娟, 姜芸, 尹毅, 等. 上海南汇风电场柔性直流输电示范工程研究[J]. 高电压技术, 2015, 41(4): 1132-1139. Jiang Xiaojuan, Jiang Yun, Yin Yi, et al. A demonstration project of flexible DC power transmission in Shanghai Nanhui wind power station[J]. High Voltage Engineering, 2015, 41(4): 1132-1139.
[7] Teeuwsen S P. Modeling the trans bay cable project as voltage-sourced converter with modular multilevel converter design[C]//2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 2011: 1-8.
[8] 王锡凡, 刘沈全, 王秀丽, 等. 分频输电系统研究现状、趋势与展望[J]. 中国电机工程学报, 2024, 44(17): 6775-6787. Wang Xifan, Liu Shenquan, Wang Xiuli, et al. Status, Trends and prospects of the fractional frequency transmission system[J]. Proceedings of the CSEE, 2024, 44(17): 6775-6787.
[9] Diaz M, Cardenas R, Espinoza M, et al. Control of wind energy conversion systems based on the modular multilevel matrix converter[J]. IEEE Transactions on Industrial Electronics, 2017, 64(11): 8799-8810.
[10] Meng Yongqing, Li Sijia, Zou Yichao, et al. Stability analysis and control optimisation based on particle swarm algorithm of modular multilevel matrix converter in fractional frequency transmission system [J]. IET Generation, Transmission & Distribution, 2020, 14(14): 2641-2655.
[11] Luo Jiajie, Zhang Xiaoping, Xue Ying. Small signal model of modular multilevel matrix converter for fractional frequency transmission system[J]. IEEE Access, 2019, 7: 110187-110196.
[12] Kawamura W, Hagiwara M, Akagi H. Control and experiment of a modular multilevel cascade converter based on triple-star bridge cells[J]. IEEE Transactions on Industry Applications, 2014, 50(5): 3536-3548.
[13] 宁联辉, 吴再驰, 王锡凡, 等. 基于模块化多电平矩阵式换流器的分频输电系统低频侧阻抗建模及稳定性判别[J]. 电网技术, 2022, 46(10): 3720-3730. Ning Lianhui, Wu Zaichi, Wang Xifan, et al. Low-frequency side impedance modeling and stability discrimination of fractional frequency transmission system based on modular multilevel matrix converter [J]. Power System Technology, 2022, 46(10): 3720-3730.
[14] 华文, 林进钿, 裘鹏, 等. 柔性低频输电高频谐振风险评估及抑制方法研究[J]. 浙江电力, 2022, 41(10): 87-96. Hua Wen, Lin Jintian, Qiu Peng, et al. Research on a risk evaluation and suppression method for high-frequency resonance of flexible low-frequency transmission[J]. Zhejiang Electric Power, 2022, 41(10): 87-96.
[15] 向念文, 王书来, 邵冰冰, 等. 柔性低频输电系统宽频振荡研究现状与展望[J]. 高电压技术, 2024, 50(5): 1967-1977. Xiang Nianwen, Wang Shulai, Shao Bingbing, et al. Research status and challenges of wide-band oscillation in flexible low-frequency transmission system[J]. High Voltage Engineering, 2024, 50(5): 1967-1977.
[16] 辛焕海, 李子恒, 董炜, 等. 三相变流器并网系统的广义阻抗及稳定判据[J]. 中国电机工程学报, 2017, 37(5): 1277-1293. Xin Huanhai, Li Ziheng, Dong Wei, et al. Generalized-impedance and stability criterion for grid-connected converters[J]. Proceedings of the CSEE, 2017, 37(5): 1277-1293.
[17] 王晴, 刘增, 韩鹏程, 等. 基于变流器输出阻抗的直流微电网下垂并联系统振荡机理与稳定边界分析[J]. 电工技术学报, 2023, 38(8): 2148-2161. Wang Qing, Liu Zeng, Han Pengcheng, et al. Analysis of oscillation mechanism and stability boundary of droop-controlled parallel converters based on output impedances of individual converters in DC microgrids[J]. Transactions of China Electrotechnical Society, 2023, 38(8): 2148-2161.
[18] 于潇寒, 王睿, 邹亮, 等. 基于平衡截断的锁相环完整结构保留双馈风电机组降阶模型构建[J].电工技术学报, 2026, 41(3): 898-911. Yu Xiaohan, Wang Rui, Zou Liang, et al. construction of reduced order model of doubly-fed wind turbines with the preservation of complete phase-locked loop structure based on balanced truncation[J]. Transactions of China Electrotechnical Society, 2026, 41(3): 898-911.
[19] 郑涛, 康恒. 基于控保协同的柔性低频输电系统电流差动保护性能提升方案[J]. 电工技术学报, 2025, 40(7): 2162-2177. Zheng Tao, Kang Heng. Improvement of current differential protection performance of flexible low-frequency transmission system based on control and protection cooperation[J]. Transactions of China Electrotechnical Society, 2025, 40(7): 2162-2177.
[20] 李龙源, 付瑞清, 吕晓琴, 等. 接入弱电网的同型机直驱风电场单机等值建模[J]. 电工技术学报, 2023, 38(3): 712-725. Li Longyuan, Fu Ruiqing, Lü Xiaoqin, et al. Single machine equivalent modeling of weak grid connected wind farm with same type PMSGs[J]. Transactions of China Electrotechnical Society, 2023, 38(3): 712-725.
[21] 法拉蒂尔, 杨靖, 花斌, 等. 基于回比矩阵的双馈风电机组多机稳定性分析[J]. 电气技术, 2023, 24(6): 26-36, 41. Fa Ladier, Yang Jing, Hua Bin, et al. Multi-machine stability analysis of doubly-fed wind turbine based on return-ratio matrix[J]. Electrical Engineering, 2023, 24(6): 26-36, 41.
[22] 李冠群. 风电经柔直并网系统高频振荡与暂态稳定性研究[D]. 济南: 山东大学, 2023. Li Guanqun. Study on high frequency oscillation and transient stability of wind power grid-connected system through flexible direct current[D]. Jinan: Shandong University, 2023.
Abstract The low-frequency transmission based on the modular multilevel matrix converter (M3C) demonstrates substantial potential for offshore wind power. As a typical multi-input multi-output system characterized by multiple control loops, the M3C exhibits a highly pronounced conflict between model complexity and accuracy. Furthermore, as a voltage-source converter, when operating under current vector control, the M3C presents negative resistance characteristics in the high-frequency domain, rendering it susceptible to high-frequency oscillations.
To address the mechanism analysis and suppression requirements of high-frequency oscillations in offshore wind power low-frequency transmission systems, this paper establishes an M3C four-port admittance model that facilitates system integration. A truncation-based order reduction method, constrained by preserving port self-admittance characteristics and described using the average Manhattan distance, is proposed. Subsequently, by integrating the single-machine equivalent output impedance of a direct-drive wind farm and a multi-segment π-type equivalent model of low-frequency submarine cables, the analysis focuses on potential high-frequency oscillations on the low-frequency side. Based on impedance intersection characteristics, high-frequency oscillations are classified into two typical frequency bands, and key parameters influencing these oscillations are identified. An additional control strategy based on a virtual resistance-inductance branch is proposed, along with a parameter design method considering the wide-range impedance distribution of wind farms. Finally, through MATLAB/Simulink time-domain simulation and hardware-in-the-loop experiment, the admittance modeling, high-frequency oscillation mechanism, and the robustness of proposed additional control strategy were verified.
The results of this paper are as follows: Firstly, the full-order M3C four-port admittance model is overly complex. Truncation-based order reduction via Manhattan distance is feasible for stability analysis and parameter design. Secondly, the coupling impedance between the wind farm and M3C is significantly smaller than the self-impedance, enabling the use of dq-axis amplitude-phase characteristics to analyze dominant instability mechanisms. Thirdly, in long-distance low-frequency transmission scenarios, the high-frequency impedance of the wind farm side is dominated by low-frequency submarine cables. Impedance mismatch with the M3C readily induces high-frequency oscillations.
Based on the above results, the conclusions of this paper are as follows: (1) The isolating effect of sub-module capacitors in the M3C results in weak coupling between the low-frequency side and the power-frequency side. When studying the stability of the low-frequency side or power-frequency side in an offshore wind power low-frequency transmission system, part of the coupling elements introduced by sub-module capacitors can be neglected to form a reduced-order admittance model. (2) Low-frequency submarine cables, M3C arm inductors, control parameters, and delays significantly affect high-frequency oscillations. Cable parameters most directly influence oscillation distribution, with shorter cables exacerbating stability issues. (3) The virtual resistance-inductance-based additional control effectively suppresses oscillations caused by low-frequency cables and control delays. Moreover, the parameter design takes into account the impedance distribution range of wind farms, endowing the strategies with enhanced robustness.
keywords:Low-frequency transmission system, modular multilevel matrix converter, admittance model, high-frequency oscillation, suppression strategy
DOI: 10.19595/j.cnki.1000-6753.tces.250344
中图分类号:TM614
国家自然科学基金项目(52377190)、江苏省自然科学基金面上项目(BK20231446)、中国科协青年人才托举工程(2023QNRC001)资助。
收稿日期 2025-03-05
改稿日期 2025-04-10
陈鹏伟 男,1992年生,副教授,硕士生导师,研究方向为直流供配电系统稳定性建模、分析与优化控制。E-mail:chenpw2014@163.com
陈 杰 男,1982年生,教授,研究方向为电力电子变换装置的建模与控制技术、微电网与分布式发电技术、航空二次电源技术等。E-mail:chen_jie@nuaa.edu.cn(通信作者)
(编辑 赫 蕾)