 (1)
(1)
摘要 风资源的起伏致使风电在不同场景下对系统的频率支撑能力有所差异,而风电的频率支撑能力、控制策略及控制参数的不匹配将严重影响系统频率的动态响应。为提升风电参与频率支撑时的稳定性与持续性,该文首先提出一种考虑转速平滑恢复的风机频率支撑控制策略,使风机在系统频率到达最低点之后自适应地减小有功功率输出,使其进入转速恢复状态,同时根据转速恢复情况自适应地减小频率支撑控制参数,抑制了转速恢复对系统频率的不利影响;其次,依据风机参与频率支撑期间的运行点偏移,求得不同转速下风机的最小动能损耗,进而求出风机的最大频率支撑能量;然后推导出了计及同步机与风电参与频率支撑的系统频率动态响应模型的时域表达式,统一了不同阻尼比下的频率极值点计算式;随后,基于系统频率安全约束与风机频率支撑能量约束,建立了分别以风机频率支撑量和风机偏移量最小为目标的优化模型,实现了故障场景下各风电场控制参数的整定;最后通过IEEE 30节点系统和实际电网的仿真算例验证了所提方法的有效性。
关键词:风电场 频率支撑控制 参数整定 转速恢复 二次跌落
随着风电通过电力电子接口不断地并入电网,传统的发电控制方式将风电的惯性特征埋没[1-2],导致风电无法对系统频率进行有效支撑,使系统频率支撑强度遭到严重削弱[3]。随着新能源调频技术的不断发展,风机通过将转子动能与电网频率耦合等控制方式协助同步机组向系统提供频率支撑,有效地提升了系统的频率支撑强度与惯性水平[4]。
目前,风电主要通过功率备用控制[5-6]与非减载频率支撑控制[7]对系统进行频率支撑。前者通过超速减载[8]或桨距角控制[9]等方式预留调频备用,但由于采用此类控制方法使风机无法处于满发状态以及机械磨损[10]等原因,其经济性并不突出。后者由于能保证风机在非减载状态下运行[11],其经济性更好,并且虚拟惯性与下垂控制方式相对容易实现,此类控制方式已成为当前的研究趋势。针对采用非减载频率支撑控制的风机,其功率反馈环节响应系统频率变化的支撑效果与虚拟惯性和下垂控制参数的大小相关,若控制参数过小,风机对系统频率的支撑效果不明显;若控制参数过大,风机则会因其转速在一次调频期间下降过快而触发转速保护,最终引起系统频率的二次跌落。
为使风机能够在不同风况下发挥其频率支撑能力,文献[12]制定了桨距角修正与旋转动能最大化的协同控制策略,该方法基于预测数据降低了桨距角的变化率,有效地减小机械设备的磨损,提升了系统频率动态响应性能。文献[13]分析了风机频率支撑控制参数对系统频率的影响,综合频率首次跌落与二次跌落等指标整定控制参数,并探索风电不同占比下的参数整定规律。文献[14]对新能源虚拟惯性控制、下垂控制和负荷频率控制等参数建立多目标优化模型,参考该模型调整微电网控制参数能够减小系统频率偏差和甩负荷量。文献[15]揭示了转速恢复触发时机与有功扰动量对系统频率二次跌落的影响机理,提出了一套适应转速变化的变控制参数机制,将该机制引入转速恢复控制策略后实现了风机转速的平稳恢复。为避免常规运行状态与频率支撑状态之间的切换引起的系统频率二次跌落,文献[16]提出一种时变下垂控制策略,在有效避免较大频率偏移的同时,也能促进风机转子动能的平稳恢复。综上所述,建立适配不同风速场景的频率支撑控制策略及参数整定方案,充分发挥风机在一次调频期间的频率支撑能力,并且使转速平稳恢复的同时不造成严重二次跌落,将成为当前研究的热点之一。
提升风电场的频率支撑能力与转速恢复性能的,关键在于对风电场频率支撑控制策略的改进,以及虚拟惯性控制与下垂控制参数的合理整定。针对上述问题,本文首先提出了一种兼顾频率支撑强度与转速平滑恢复的风机控制策略,使风机在频率支撑初期阶段维持一定的频率支撑强度,保证系统频率不越限。通过推导全阻尼系统频率响应模型的时域表达式计算出系统频率最低点时间,在达到该时间后逐渐降低风机有功功率输出使转速平稳恢复。在此基础上,考虑风机在不同风速下的频率支撑动能与频率安全约束对各风电场的控制参数进行整定,并以风机从初始运行点的偏移量最小为目标对控制参数进一步优化。
风资源的波动性导致了风机转子所蕴含的动能也在不断变化[17],风机通过捕获空气动能输出的机械功率为
(1)
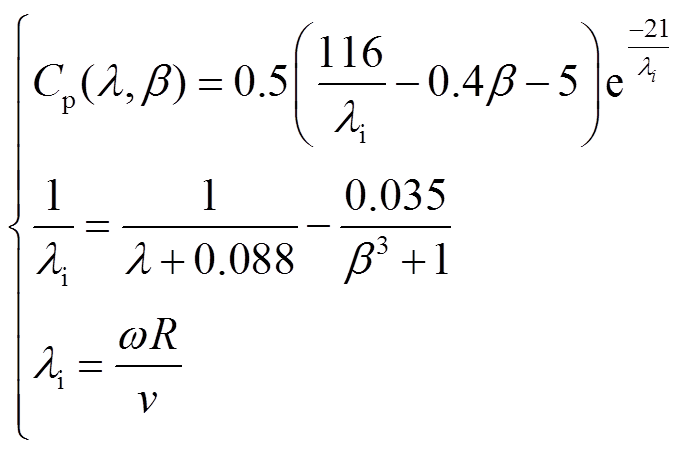
式中,ρ为空气密度; 为风机叶桨半径;v为风速;λ为风机叶尖速比;β为桨距角;Cp(λ, β)为风能捕获系数,其表达式[18]为
为风机叶桨半径;v为风速;λ为风机叶尖速比;β为桨距角;Cp(λ, β)为风能捕获系数,其表达式[18]为
 (2)
(2)
式中, 为风机转速。
为风机转速。
风机的运行工况包括启动区、最大功率点跟踪(Maximum Power Point Tracking, MPPT)区、恒转速区和恒功率区[19]。风机运行曲线示意图如图1所示。风机在启动区的风速未达到切入风速,无法并网,而若风机在恒转速区与恒功率区参与频率支撑,其桨距角调节太过频繁,增加了机械损耗且易触发保护动作,所以风机在这三种工况下不适合参与频率支撑[20]。然而风机在MPPT区的风能捕获效率最高且桨距角为零,故本文主要讨论风机在MPPT区参与频率支撑的情况。
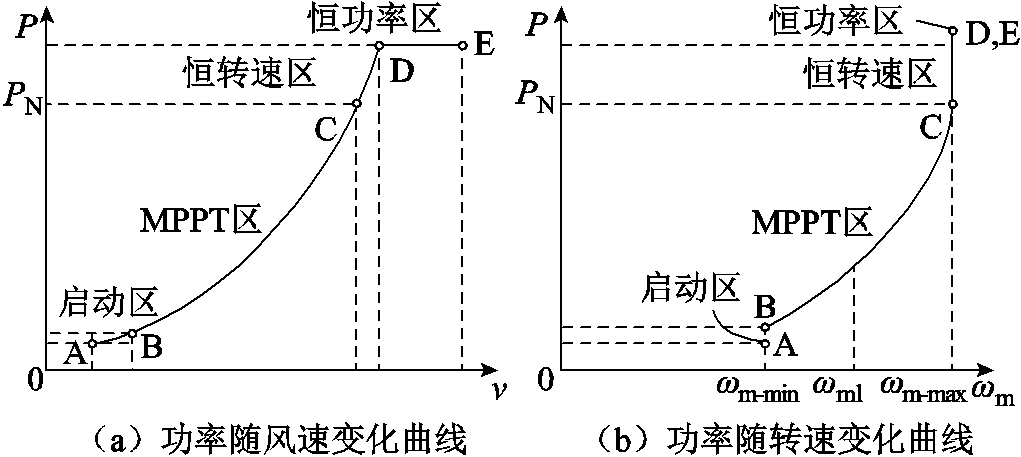
图1 风机运行曲线示意图
Fig.1 The operating characteristic curve of the wind turbine
为使风机具备与同步机组类似的频率支撑特性,传统的频率支撑控制方法通过引入比例与微分环节来效仿同步机的惯性响应与一次调频。当系统遭受干扰后,风机的频率支撑控制输出功率变化量[21]为
 (3)
(3)
式中, 为风机虚拟惯性控制参数;
为风机虚拟惯性控制参数; 为系统频率偏差;
为系统频率偏差; 为风机下垂控制参数。
为风机下垂控制参数。
当风机向系统提供频率支撑时,其有功功率输出为
 (4)
(4)
式中, 为风机MPPT控制对应的有功功率输出,其表达式为
为风机MPPT控制对应的有功功率输出,其表达式为
 (5)
(5)
式中, 为最大风能捕获系数;
为最大风能捕获系数; 为风机最优叶尖速比;
为风机最优叶尖速比; 为最优功率追踪因子。
为最优功率追踪因子。
在风机参与频率支撑期间,随着风机转速的下降,MPPT控制的有功功率输出也会随之降低,故基于MPPT的频率支撑控制无法充分发挥风机的频率支撑能力,并且该阶段风机对系统频率的支撑量无法进行准确量化。
针对上述问题,本文在频率支撑初始阶段关闭MPPT控制,以故障发生时刻风机出力作为基础值,再叠加频率支撑控制的有功功率增量进行调频。在系统频率到达最低点之后,根据风机转速与故障时刻初始转速之间的差值自适应地减小风机有功功率输出使风机进入转速恢复状态。令该控制部分的有功功率输出为 ,故障发生时刻为
,故障发生时刻为 ,则故障发生前的仍为。而频率支撑期间的为
,则故障发生前的仍为。而频率支撑期间的为
 (6)
(6)
转速恢复期间的为
 (7)
(7)
式中, 为转速恢复控制触发时刻,可取为
为转速恢复控制触发时刻,可取为 ,tnadir为系统频率最低点时间;
,tnadir为系统频率最低点时间; 为风机的自适应有功功率输出变化量,其表达式为
为风机的自适应有功功率输出变化量,其表达式为
 (8)
(8)
式中, 为故障发生时刻的风机初始转速;
为故障发生时刻的风机初始转速; 为调节系数。
为调节系数。
由式(8)可知,在初始阶段,随着 的逐渐增大,由0逐渐增加,避免了功率突变对系统频率的影响;在转速恢复的后期,随着
的逐渐增大,由0逐渐增加,避免了功率突变对系统频率的影响;在转速恢复的后期,随着 的逐渐减小,逐渐减小为0。通过这种方式初步实现的平滑输出与转速的平稳恢复。
的逐渐减小,逐渐减小为0。通过这种方式初步实现的平滑输出与转速的平稳恢复。
当风机进入转速恢复阶段时,若风机直接从频率支撑控制切换至MPPT控制,系统频率将会出现二次跌落。针对上述问题,本文设计了一种随转速恢复而逐渐减小的变频率支撑控制参数策略,变参数kd和kp分别为
 (9)
(9)
式中, 为转速开始恢复时刻。
为转速开始恢复时刻。
根据式(9)可知,当风机转速开始恢复时,风机频率支撑控制参数开始逐渐减小,与此同时频率支撑控制的有功功率增量也开始逐渐减小。该控制方式同样可以降低传统固定控制参数造成的有功功率骤变对系统频率的不利影响。
本文采用的双馈风机综合频率支撑控制结构如图2所示,在对系统进行频率支撑时,相较于基于MPPT控制,在控制参数相同的情况下该频率支撑控制具有更好的频率响应效果。
所提控制策略主要步骤如下:
1)获取系统中各机组的初始参数,如同步机组的频率支撑参数、风电机组的输出功率P0及转速ω0等。
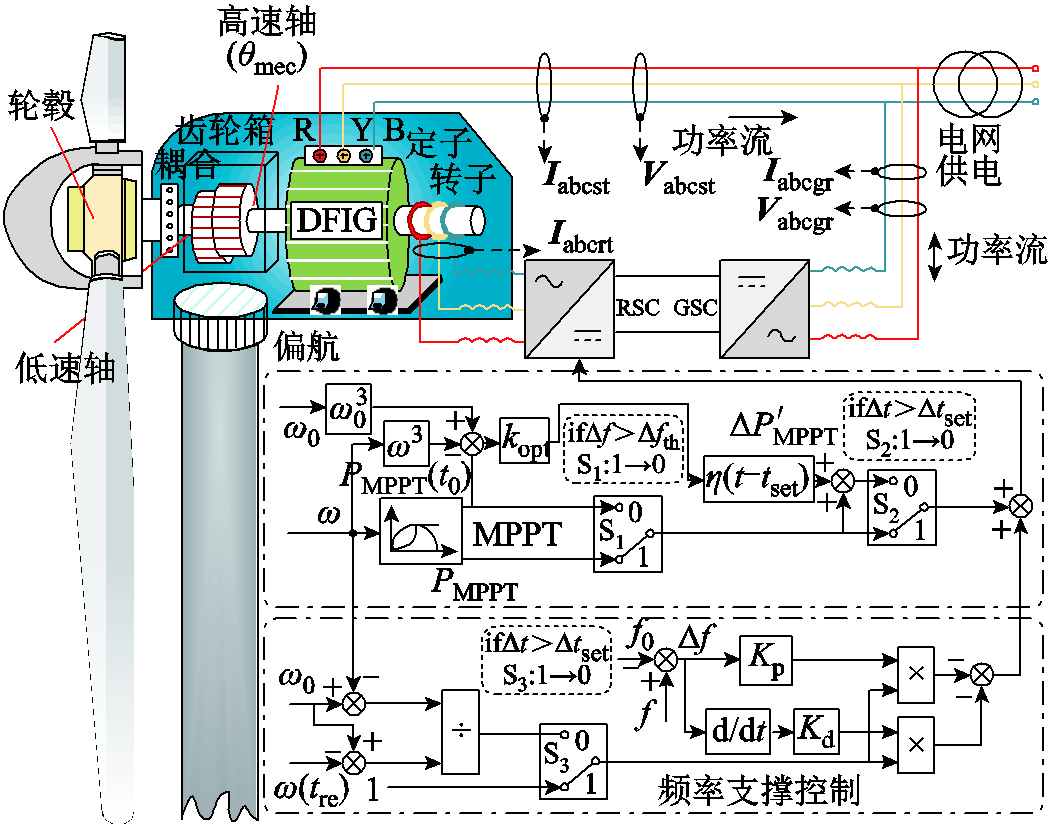
图2 双馈风机综合频率支撑控制结构
Fig.2 Comprehensive FS control structure diagram for DFIGs
2)依据频率最低点时间解析式与同步机组和风机的频率支撑参数计算系统频率最低点时间 ,结合设置进入转速恢复状态的初始时刻。
,结合设置进入转速恢复状态的初始时刻。
3)当系统处于频率支撑阶段时,结合式(3)与式(6)可得风机在 时段的输出有功功率为
时段的输出有功功率为 。
。
4)当 时,结合式(3)与式(7)可得风机的输出有功功率为
时,结合式(3)与式(7)可得风机的输出有功功率为 ,该时段风机有功出力平滑降低,使得风机能够平稳地进入转速恢复状态。
,该时段风机有功出力平滑降低,使得风机能够平稳地进入转速恢复状态。
5)当转速开始回升时,根据式(9)逐步减小风机频率支撑控制参数,直至风机完全退出频率支撑。
由于风机在MPPT区的桨距角为零,其最优叶尖速比可通过令 对
对 的偏导等于零获得。
的偏导等于零获得。
 (10)
(10)
风机在MPPT区的转子动能 为
为
 (11)
(11)
式中,J为风机的转动惯量; 为风机转子的最低转速。
为风机转子的最低转速。
风机在释放转子动能时其转速也会同步降低,这将导致减小,从而使得风机无法维持在初始运行点[22]。如果忽略运行点偏移的影响而直接采用初始转子动能计算频率主动支撑控制参数,则可能导致参数过大,进而致使风机在一次调频期间提前将转子动能释放完毕,最终将会引发系统频率的二次跌落[23]。综上所述,本文在频率主动支撑控制参数计算的过程中,会考虑风机在参与频率支撑时偏离初始运行点而产生的能量损耗,保证风机在频率支撑过程中的持续性,降低系统频率二次跌落的发生的概率。
 (12)
(12)
式中, 为考虑风机偏离初始运行点的可用净频率支撑动能;EKE0为风机初始动能;
为考虑风机偏离初始运行点的可用净频率支撑动能;EKE0为风机初始动能; 为风机偏离初始运行点造成的动能损失,其计算式为
为风机偏离初始运行点造成的动能损失,其计算式为
 (13)
(13)
式中, 为风机初始运行点下的机械功率;
为风机初始运行点下的机械功率; 为风机参与频率支撑时长。
为风机参与频率支撑时长。
风机频率支撑控制的能量主要来自转子动能。将式(3)右边第一项转为有名值形式,可得惯性响应的有功功率增量为
 (14)
(14)
式中, 为风机的额定容量;
为风机的额定容量; 为系统频率基准值。
为系统频率基准值。
对式(14)两边进行积分可得到频率支撑期间惯性响应释放的能量为
 (15)
(15)
式中, 为系统准稳态频率偏差。
为系统准稳态频率偏差。
将式(3)右边第二项转为有名值形式,可得下垂响应的有功功率增量为
 (16)
(16)
对式(16)进行积分可得下垂响应释放的能量的近似值为
 (17)
(17)
本节在传统同步机组系统频率响应(System Frequency Response, SFR)模型的基础上,增加了风电场频率支撑控制的传递函数,并对电力系统的MM-SFR模型进行修正。当系统遭受大小为 的有功功率扰动时,风电参与频率支撑的系统频率动态响应模型可由图3近似表示[24]。
的有功功率扰动时,风电参与频率支撑的系统频率动态响应模型可由图3近似表示[24]。
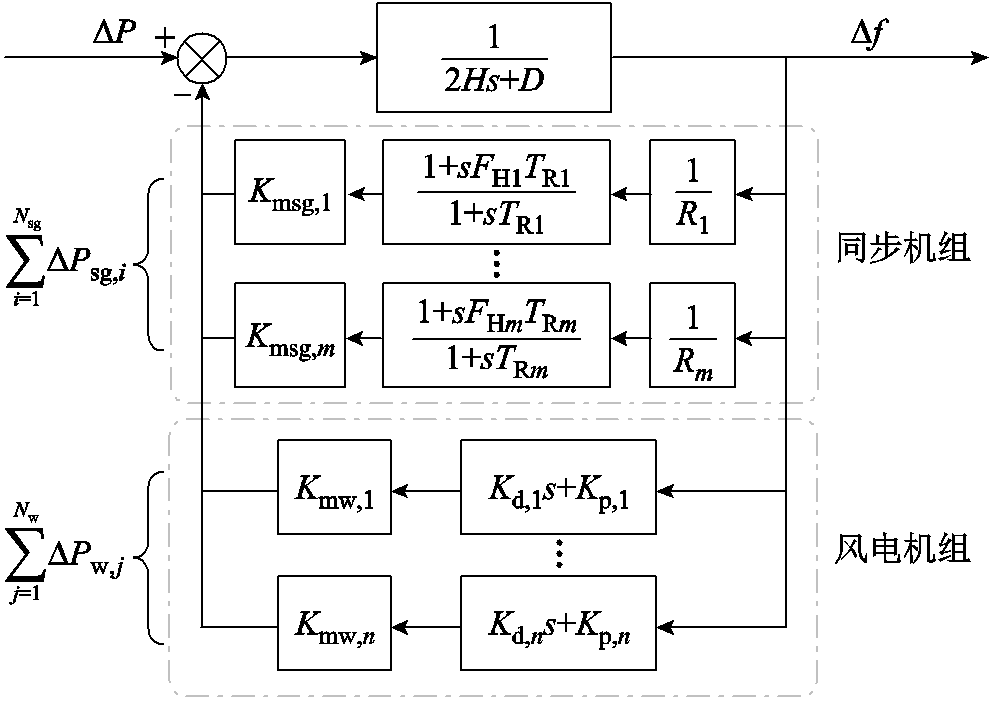
图3 考虑风电的系统频率响应模型
Fig.3 System frequency response model considering FS from wind power
根据各类型资源频率响应方式的不同,本节将考虑同步机与风电场的电力系统频率响应模型聚合成如图4所示。
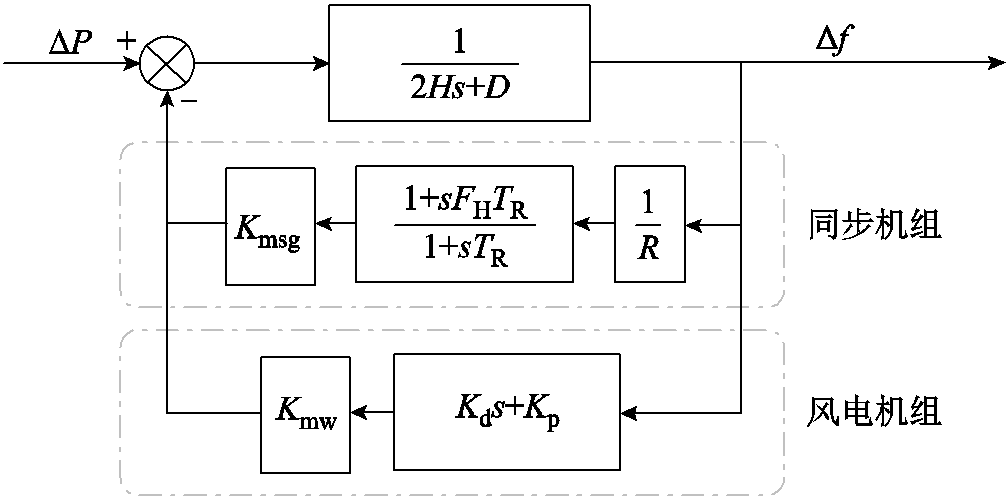
图4 简化的系统频率响应模型
Fig.4 Simplified system frequency response model
基于图4,风机参与频率支撑时的系统频率动态s域表达式为
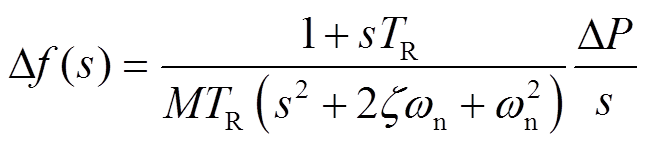 (18)
(18)
式中, 、
、 和
和 分别为风机参与频率支撑时的无阻尼自然角频率、阻尼比和系统等效惯性常数;TR为再热时间常数;为有功扰动量。
分别为风机参与频率支撑时的无阻尼自然角频率、阻尼比和系统等效惯性常数;TR为再热时间常数;为有功扰动量。
 (19)
(19)
 (20)
(20)
 (21)
(21)
 (22)
(22)
 (23)
(23)
式中, 、
、 分别为同步机、风电机组在系统中的容量占比;H为同步机等效惯量,
分别为同步机、风电机组在系统中的容量占比;H为同步机等效惯量, ,
, 为同步机惯性时间常数;
为同步机惯性时间常数; 为高压缸功率比例;R为同步机等效调差率。
为高压缸功率比例;R为同步机等效调差率。
如式(20)所示,系统阻尼状态与各类型机组的频率支撑控制参数及各自占比均有关联。将式(18)变换到时域,可得系统惯性中心的频率动态时域表达式为
 (24)
(24)
其中
 (25)
(25)
 (26)
(26)
 (27)
(27)
需要注意的是,式(24)仅适用于描述欠阻尼状态的系统频率动态,在过阻尼状态下,式(24)将存在较大的计算误差。而系统频率动态会随风电占比变化从欠阻尼逐步过渡为过阻尼。此时,由式(24)描述的系统频率动态将不再适用,故需要进一步计算将其拓展为适应全阻尼状态下的系统频率动态。为此,本文将式(18)的s域表达式进行转换,得到
 (28)
(28)
其中
 (29)
(29)
将式(28)变换到时域,可得系统频率动态时域表达式为
 (30)
(30)
其中
 (31)
(31)
 (32)
(32)
根据式(30)可以求得全阻尼状态下系统受到扰动后的频率最低点时间,即
 (33)
(33)
将代入式(30)中即可求得全阻尼状态下的最大频率偏差为
 (34)
(34)
由于式(34)中存在指数函数等非线性项,直接将其引入参数整定模型会增加模型求解难度,并且十分耗时。为保证所构建的参数整定模型的求解效率,需对最大频率偏差进行线性化处理,从而得到凸优化模型的近似数值解。最大频率偏差 与频率支撑控制参数、之间的关系如图5所示,本文采用超平面替代法对最大频率偏差进行线性化处理。
与频率支撑控制参数、之间的关系如图5所示,本文采用超平面替代法对最大频率偏差进行线性化处理。
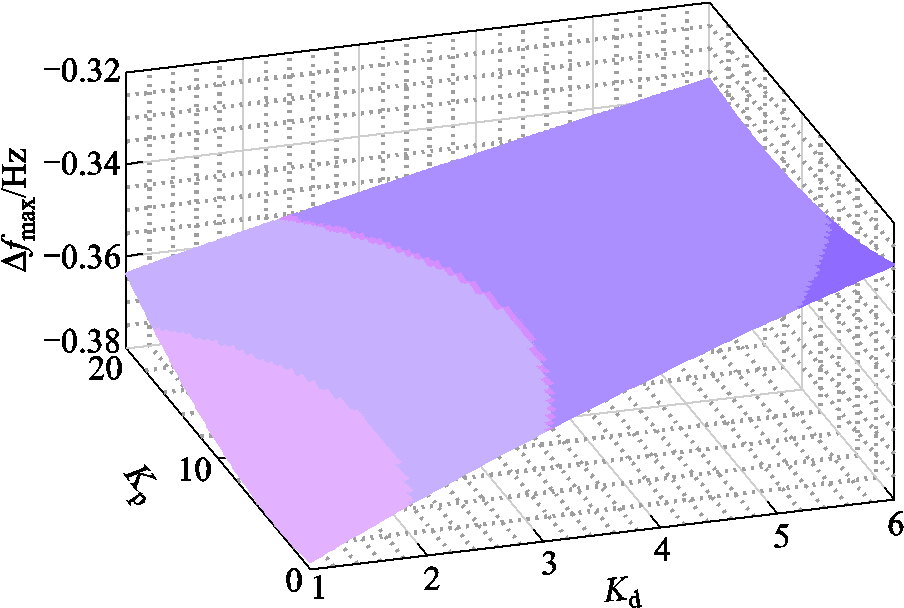
图5 系统频率最大偏差与Kd和Kp的关系
Fig.5 The relationship between the maximum deviation of system frequency and Kd, Kp
在与的取值范围内组建参数集S,再将S划分为 个子参数集。在子参数集
个子参数集。在子参数集 内,函数
内,函数 为
为
 (35)
(35)
式中, 、
、 和
和 为子参数集对应的超平面参数。
为子参数集对应的超平面参数。
由式(34)和式(35)可得超平面参数为
 个函数组成超平面集
个函数组成超平面集 ,频率最低点
,频率最低点 可表示为
可表示为
 (37)
(37)
式中,fth为频率最低点的阈值。
在扰动场景下,风电场虚拟惯性响应和下垂响应均能为系统频率提供支撑。因此,本文以最小化惯性响应量与下垂响应量为目标,综合考虑同步机组、风电场的频率响应特性,通过构建参数整定模型确定基于频率安全约束与动能约束的风电场频率支撑控制参数。参数整定模型分为两个阶段:首先在第一阶段获取风电场频率支撑总需求量;然后在第二阶段对各风电场的频率支撑量进行优化分配。第一阶段风电场频率支撑总需求量优化模型如下所示。
1)目标函数
目标函数f1![]() 为最小化惯性响应需求,即
为最小化惯性响应需求,即
 (38)
(38)
式中, 为风电场数量;
为风电场数量; 为第一阶段第i个风电场的惯性响应系数。
为第一阶段第i个风电场的惯性响应系数。
目标函数f2![]() 为最小化下垂响应需求,即
为最小化下垂响应需求,即
 (39)
(39)
式中, 为第一阶段第i个风电场下垂响应系数。
为第一阶段第i个风电场下垂响应系数。
2)约束条件
故障下电力系统常规安全约束包括常规机组与风机的一次调频备用需求约束、风机惯量约束。
 (40)
(40)
 (41)
(41)
 (42)
(42)
式中,Psg,imax、Pw,imax分别为同步机、风电场的容量;Hw,imax为风电场的惯量上限;Nsg、Nw分别为同步机、风电场的数量。
有功功率扰动发生后系统频率变化率(Rate of Change of Frequency, RoCoF)与频率最低点约束分别为
 (43)
(43)
 (44)
(44)
式中, 为
为 的最大值;
的最大值; 为频率变化率的阈值。
为频率变化率的阈值。
系统的RoCoF最大值通常在故障发生时刻出现,可表示为
 (45)
(45)
各风电场在频率支撑期间的能量约束为
 (46)
(46)
在确保风电场提供的惯性响应最小的前提下,尽量降低扰动场景下风电场提供的下垂响应,可以减少风电场的调频成本。由于RoCoF最大值仅与系统等效惯性有关,而最大频率偏差则与系统等效惯性、系统等效下垂均有关。故针对风电场频率支撑参数整定问题,本文采用e-约束法实现多目标分层决策,该方法可以在所有使风电场提供的惯性响应最小的备选解中找出使风电场提供的下垂响应达到最小的优选解。
第二阶段的频率支撑量优化分配模型则是以频率支撑阶段各风电场功率偏移量 和最小为目标函数,即
和最小为目标函数,即
 (47)
(47)
约束条件为各风电场频率支撑总量与第一阶段相等,即
 (48)
(48)
 (49)
(49)
式中, 、
、 分别为第二阶段第i个风电场的惯性响应系数。
分别为第二阶段第i个风电场的惯性响应系数。
风机的转速在频率支撑初始阶段可近似看作一条直线。采用 计算得到的转速等效曲线示意图如图6所示。由于惯性响应释放的能量非常小,本文采用替代
计算得到的转速等效曲线示意图如图6所示。由于惯性响应释放的能量非常小,本文采用替代 计算式(17)中的,以此来计算转速下降时的表达式,有
计算式(17)中的,以此来计算转速下降时的表达式,有
 (50)
(50)
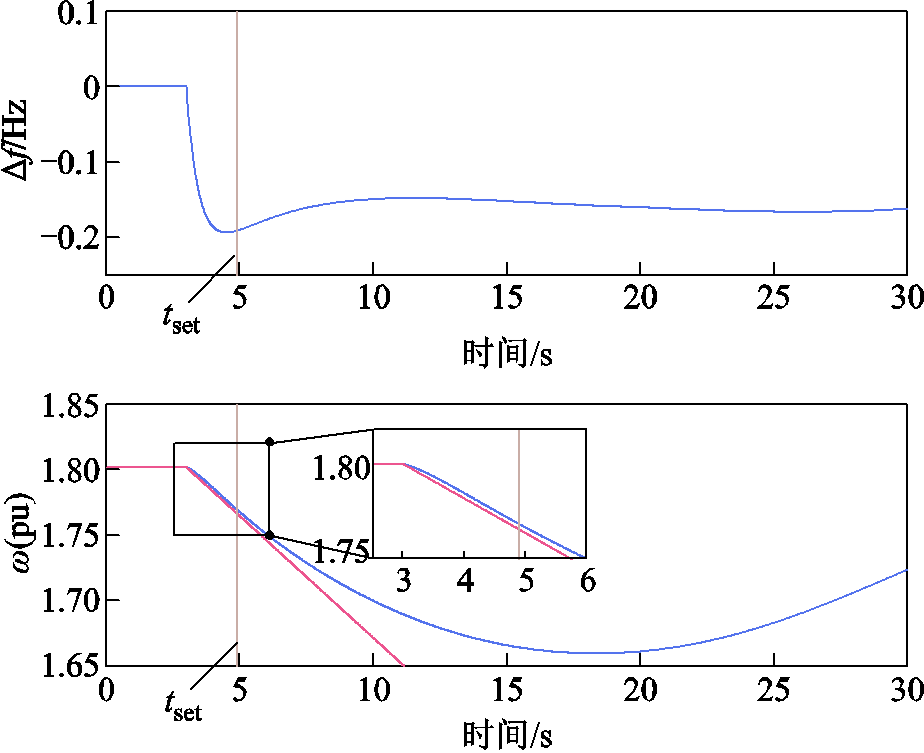
图6 转速等效曲线示意图
Fig.6 Schematic diagram of equivalent rotational speed curve
结合频率变化曲线可知,式(50)能够较为准确地描述风机转速在0~ 之间的变化情况。
之间的变化情况。
结合式(1)、式(2)和式(50)可得到风机在频率支撑期间的偏移功率为
 (51)
(51)
本文所提的风机频率支撑控制参数整定流程如图7b所示。具体步骤如下:
1)确定系统 与
与 的阈值、风电场频率支撑控制参数范围等,读取系统中同步机组的频率支撑参数与风电场初始参数。
的阈值、风电场频率支撑控制参数范围等,读取系统中同步机组的频率支撑参数与风电场初始参数。
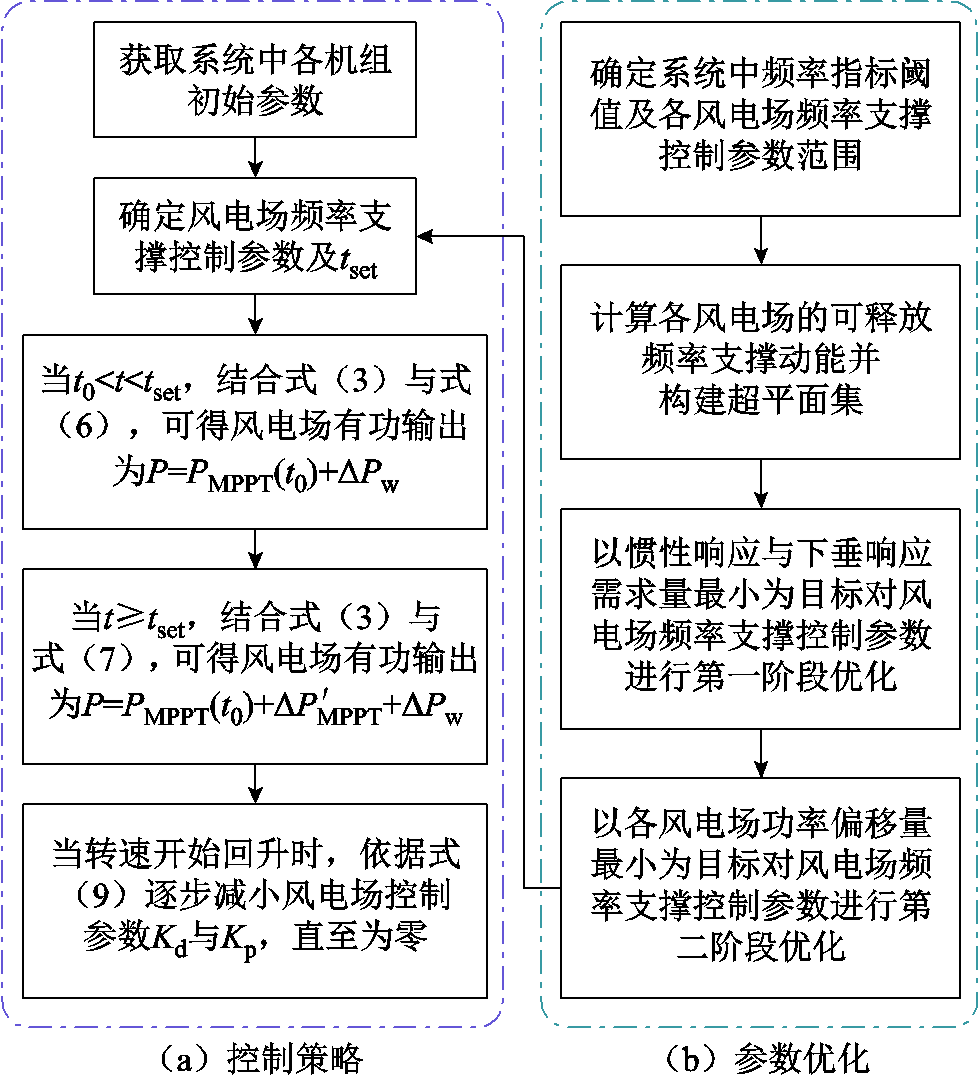
图7 风电场频率支撑控制策略与参数整定流程
Fig.7 The flowchat of frequency control strategy and parameter setting for wind farms
2)计算各风电场的可释放频率支撑动能,再构建超平面集对频率最低点约束进行线性化处理。
3)以惯性响应与下垂响应需求量最小为目标函数,结合常规约束、频率动态约束与能量约束对风电场频率支撑控制参数进行第一阶段优化。
4)以各风电场参与频率支撑时的功率偏移量最小为目标函数,辅以频率支撑总量与第一阶段持平的约束对风电场频率支撑控制参数进行第二阶段优化。通过优化求解获得最优控制参数及频率最低点时间。
本文基于改进的IEEE 30节点系统分析所提风电频率支撑控制策略及参数整定方法的有效性及准确性。所用计算机配置为CPUIntelCorei7、内存16 GB。改进的IEEE 30节点测试系统如图8所示,在测试系统中的节点18、21和26分别增设3个包含40台1.5 MW风机的风电场。同步发电机的稳态运行和调频参数见表1。最大频率变化率与频率最低点的参考值设为-0.5 Hz/s和49.8 Hz[25-26]。本文将扰动类型置为有功负荷突变,功率扰动为30 MW。
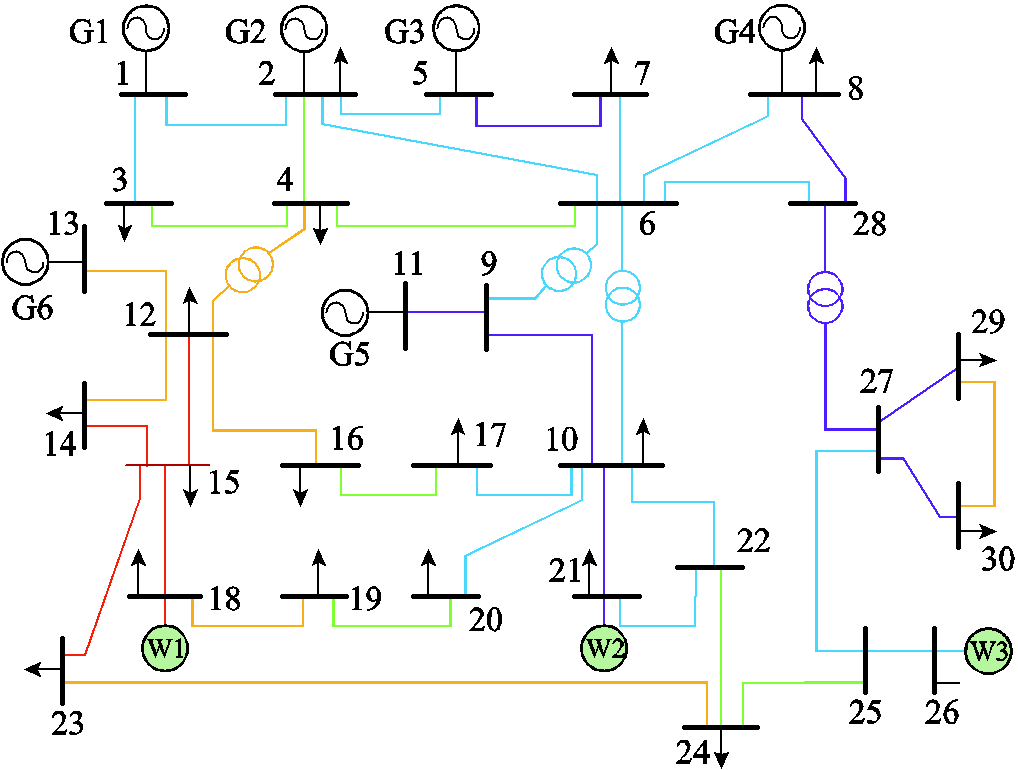
图8 改进的IEEE 30节点测试系统
Fig.8 The topology of the improved IEEE 30-bus system
表1 同步机组基本参数
Tab.1 Parameters of synchronous generators
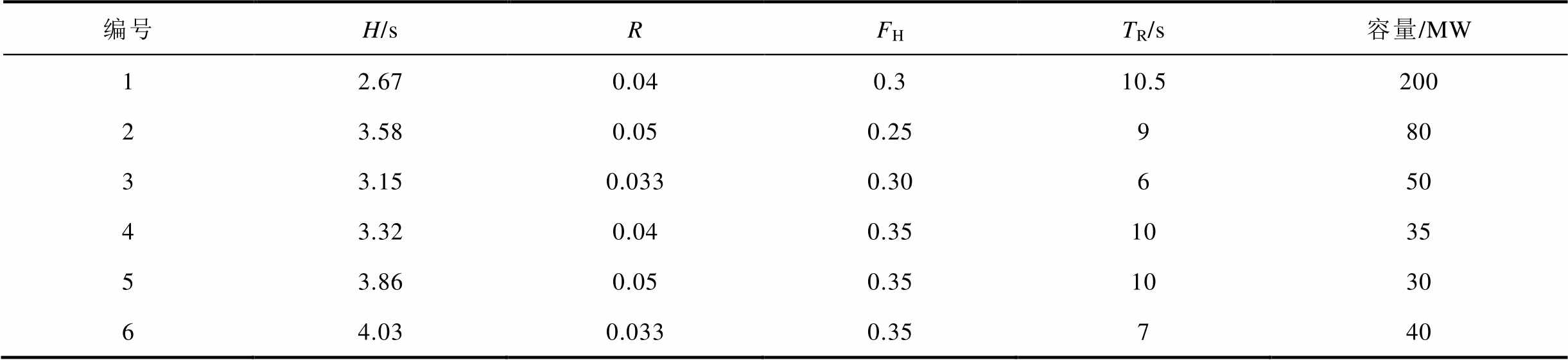
编号H/sRFHTR/s容量/MW 12.670.040.310.5200 23.580.050.25980 33.150.0330.30650 43.320.040.351035 53.860.050.351030 64.030.0330.35740
为方便叙述,将本小节分析涉及的模型归纳介绍如下:
1)仿真模型:基于Matlab-Simulink平台搭建的IEEE 30节点仿真系统,同步机组采用二阶模型,风机采用综合频率支撑控制。将此模型扰动后的系统频率响应值视作实际参考值。
2)传统SFR:解析模型,将IEEE 30节点仿真系统中所有同步电源与风电场分类聚合,将式(24)作为频率响应曲线。
3)全阻尼SFR:解析模型,将系统中的机组整合为图4中的形式,将式(30)作为频率响应曲线。
设置四组机组参数数据,传统SFR和全阻尼SFR模型在有功扰动下对最大频率偏差的计算精度对比见表2。
表2 不同模型最大频率偏差对比
Tab.2 Comparison of maximum frequency deviation among different models
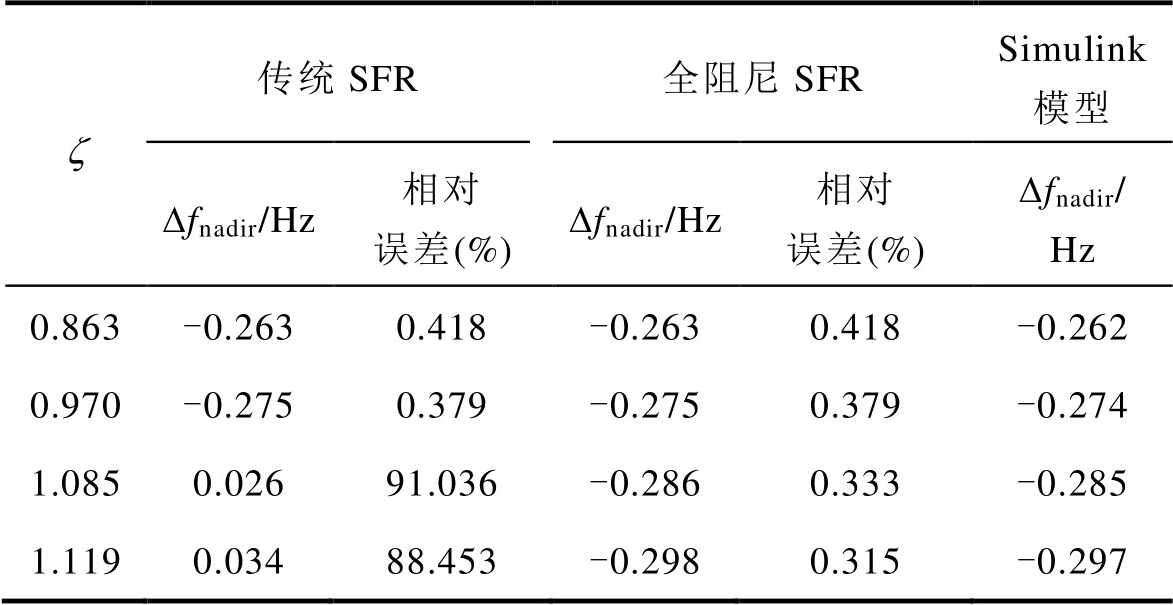
z传统SFR全阻尼SFRSimulink模型 Dfnadir/Hz相对误差(%)Dfnadir/Hz相对误差(%)Dfnadir/Hz 0.863-0.2630.418-0.2630.418-0.262 0.970-0.2750.379-0.2750.379-0.274 1.0850.02691.036-0.2860.333-0.285 1.1190.03488.453-0.2980.315-0.297
由表2可知,传统SFR模型仅在欠阻尼状态下对最大频率偏差的计算误差很小,而在过阻尼状态时对最大频率偏差的计算误差很大。然而,本文所提全阻尼SFR模型在过阻尼与欠阻尼状态下对最大频率偏差的计算误差均很小。两类模型在四组阻尼比参数的扰动后频率动态曲线如图9所示。由图9a可知,传统SFR模型仅在欠阻尼状态时能很好地描述扰动后系统频率动态,而无法在过阻尼状态时对系统频率动态进行描述;由图9b可知,本文所提全阻尼SFR模型在过阻尼与欠阻尼状态下的扰动后频率动态均与仿真相差无几。
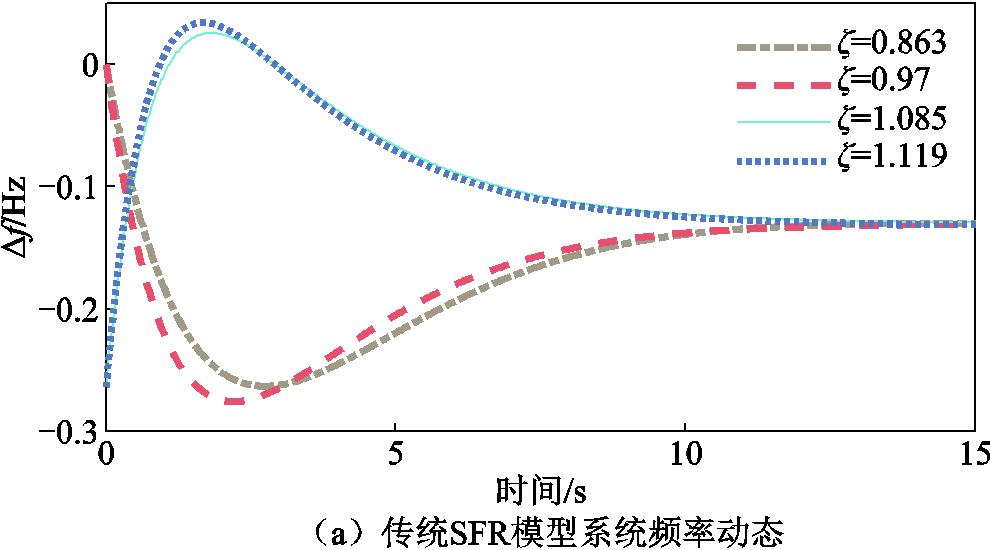
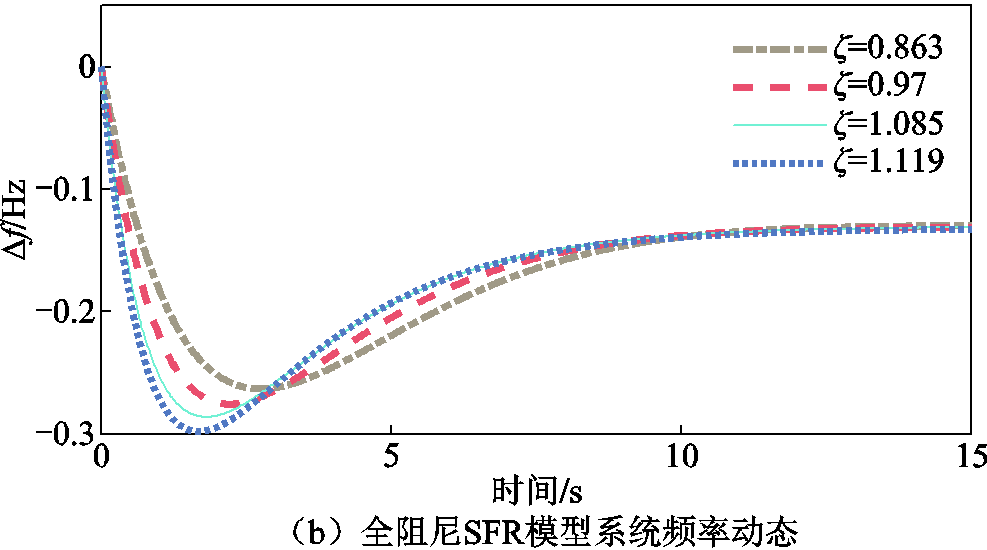
图9 各模型在不同阻尼状态下的频率动态曲线
Fig.9 Frequency deviation curves of models under different damping ratios
将本节分析涉及的控制策略归纳介绍如下。
策略1:风电场采用本文所提参数整定方法得到的参数,但在参与频率支撑期间关闭MPPT控制,待转速达到最小值时再从频率支撑控制切换至MPPT控制并恢复转速。
策略2:风电场采用本文所提参数整定方法得到的参数,但在参与频率支撑期间全程开启MPPT控制,待达到预设时间时关闭频率支撑控制并恢复转速。由于文献[27]中规定风机参与频率支撑时长不超过15 s,所以预设时间设为15 s。
策略3:风电场采用本文所提参数整定方法同时采用本文所提控制策略。
为验证本文所提策略在多风电场不同风速下的频率支撑效果,本文在测试系统中构建了多风速场景,风电场W1~W3的风速依次为11.04、10.7、8.85 m/s。
采用上述三种控制策略的风电场对系统的频率支撑效果如图10所示。从图10中可以看出,当风电场采用控制策略1时,风电场在频率支撑阶段能为系统频率提供充足的支撑;但由于前期释放了大量转子动能,当风机进入转速恢复阶段时需吸收大量能量,即退出频率支撑时刻的功率骤变幅值非常大,最终在转速恢复阶段造成了严重的系统频率跌落。当风电场采用控制策略2时,MPPT控制对功率增量的抑制作用导致很难对风机的频率支撑量进行量化,所以在频率支撑阶段风电场无法为系统频率提供充足的支撑,最终导致系统频率越限;并且风电场退出频率支撑时形成的功率骤变也会造成系统频率二次跌落。然而,控制策略3克服了策略1与策略2的缺点,其在频率支撑的初始阶段关闭了MPPT控制,使得风电场能为系统频率提供充足的支撑,在系统频率到达最低点后,自适应地减少风电场输出,使风机进入转速恢复状态,并且在风机转速进入恢复阶段后逐渐减小频率支撑控制参数,使系统不会出现功率骤变,且不会造成严重的二次跌落。
图10 39节点算例中不同控制策略的仿真结果
Fig.10 Simulation results of different control strategies in the 39-bus system
采用上述三种控制策略的风电场的转速与功率增量变化曲线如图11所示。从图11中可以看出,当风电场采用控制策略1时,各风电场的转速均跌至最低值,因此产生较大的功率突变,最终在转速恢复阶段导致系统频率跌落至49.195 Hz,并且导致RoCoF跌至-1.05 Hz/s。当风电场采用控制策略2时,虽然各风电场的转速没有跌至最低值,但退出频率支撑时同样造成较大的功率突变,最终导致频率跌落至49.787 Hz。然而,当风电场采用控制策略3时,在转速恢复机制触发后各风电场的有功功率增量自适应减少,使转速能够平滑恢复。
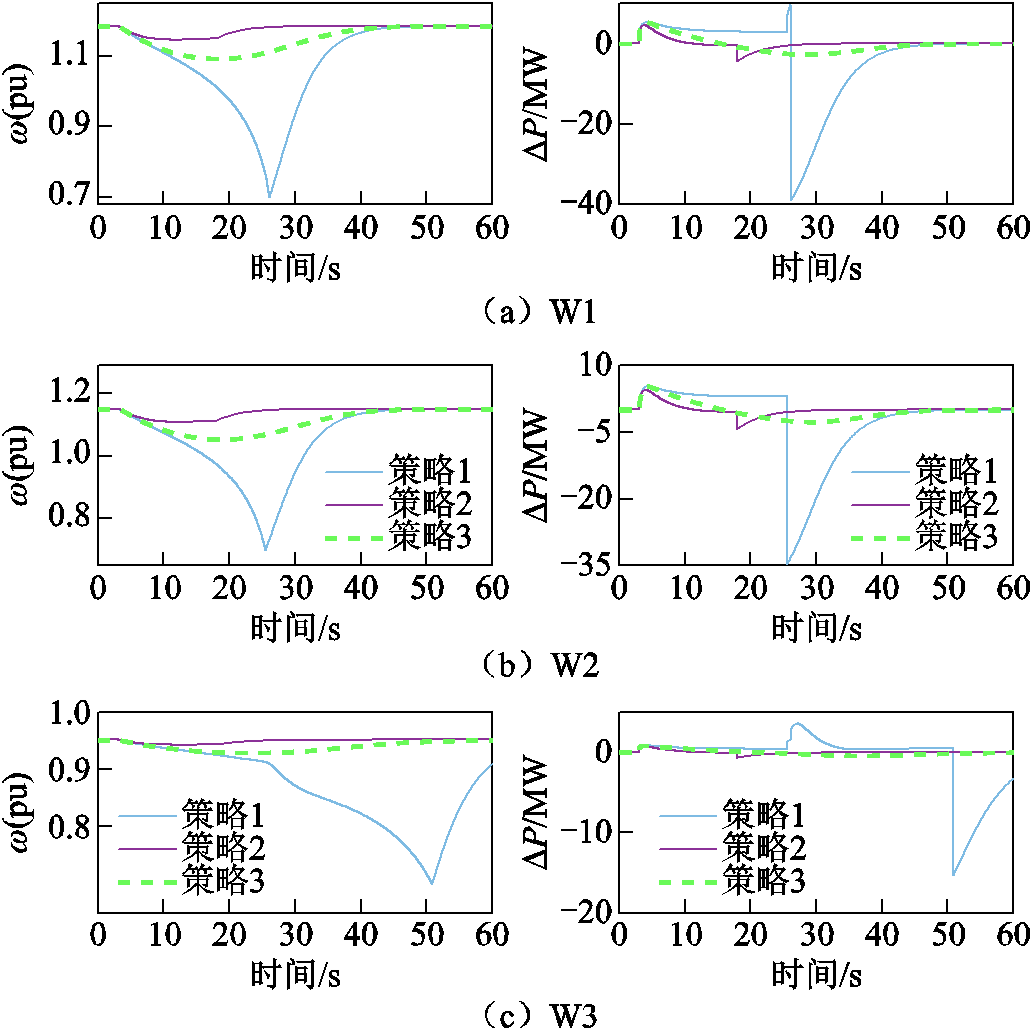
图11 39节点算例中不同控制策略下风电场的转速与功率变化曲线
Fig.11 Rotational speed and power variation curves of wind farms with different control strategies in the 39-bus system
为方便叙述,将本节分析涉及的参数整定模型归纳介绍如下。
模型1:风电场仅采用3.3节所提的一阶段参数整定模型且不包括RoCoF约束与能量约束,同时采用本文所提控制方法。
模型2:在模型1的基础上添加RoCoF约束与能量约束,同时采用本文所提控制方法。
模型3:风电场采用本文所提参数整定模型得到的参数,同时采用本文所提控制方法。
上述三种优化模型得到的控制参数见表3。设频率支撑阶段的系统频率极值点为 ,转速恢复阶段的系统频率极值点为
,转速恢复阶段的系统频率极值点为 。采用上述三种参数整定模型的系统频率仿真效果如图12所示。
。采用上述三种参数整定模型的系统频率仿真效果如图12所示。
表3 39节点算例中不同模型的参数整定结果及频率指标
Tab.3 Parameter configuration results and frequency indexes of different models in the 39-bus system
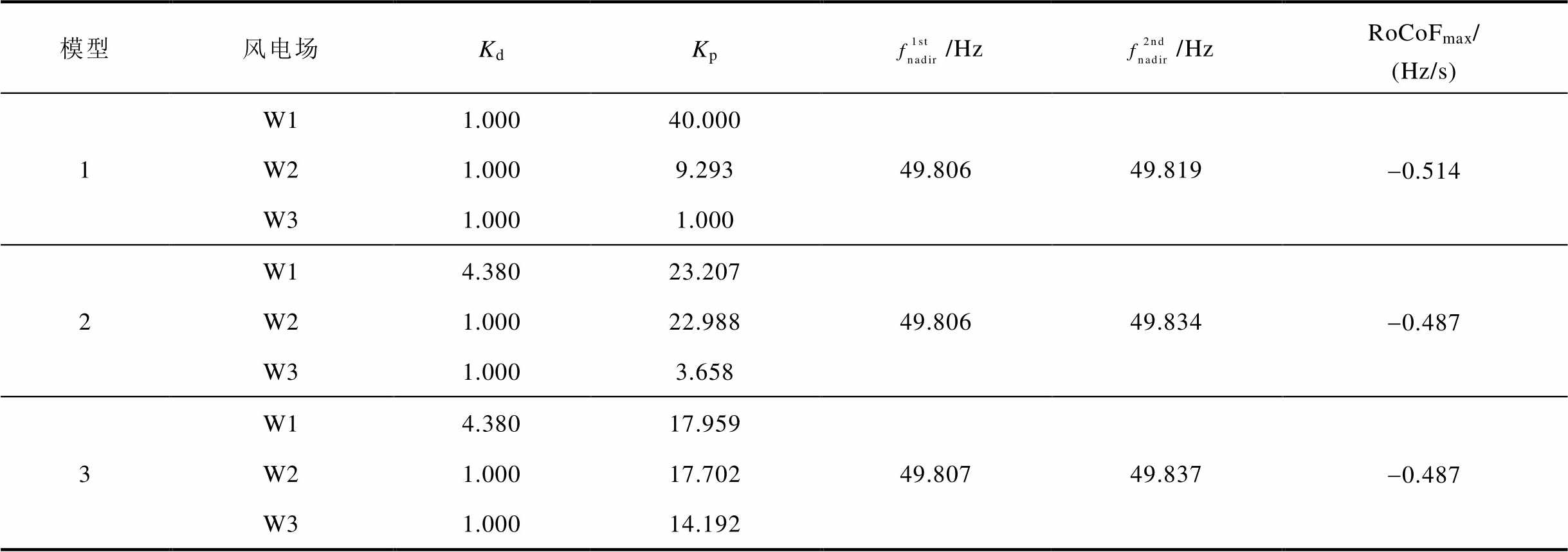
模型风电场KdKp/Hz/HzRoCoFmax/(Hz/s) 1W11.00040.00049.80649.819-0.514 W21.0009.293 W31.0001.000 2W14.38023.20749.80649.834-0.487 W21.00022.988 W31.0003.658 3W14.38017.95949.80749.837-0.487 W21.00017.702 W31.00014.192
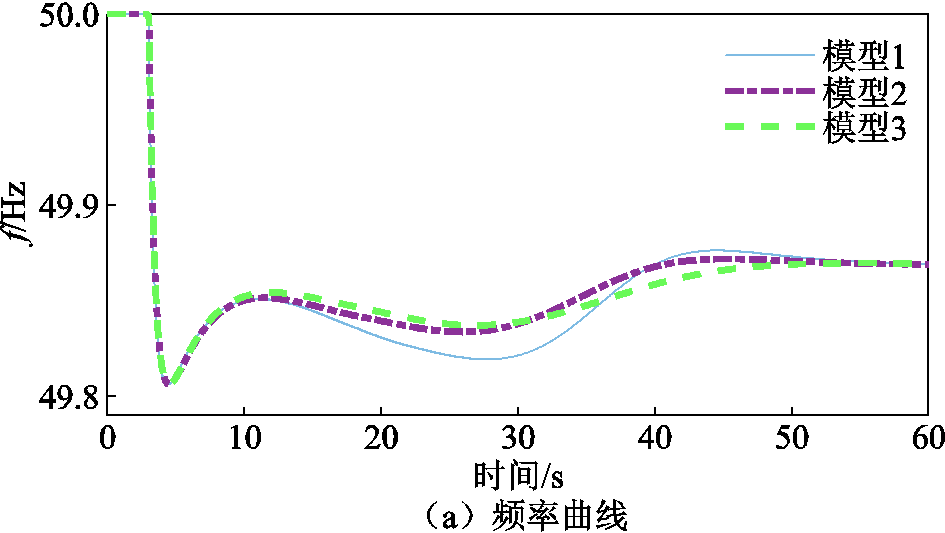
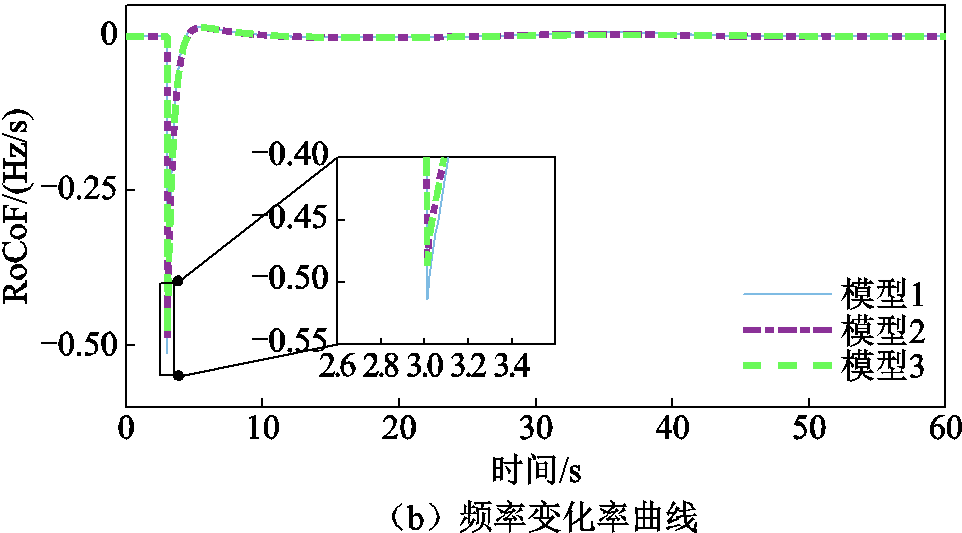
图12 39节点系统中不同参数整定模型的仿真结果
Fig.12 Simulation results of different parameter configuration models in the 39-bus system
如图12所示,当风电场采用模型1的整定参数时,由于未考虑能量约束,风电场W1和W2的下垂控制参数过大,导致动能过度释放,进而在转速恢复阶段引起严重的系统频率二次跌落,最终频率跌落至49.819 Hz。并且,由于未考虑RoCoF约束,风电场的惯性控制参数过小,无法将RoCoF限制在阈值内,最大RoCoF达到了-0.514 Hz/s。而模型2综合考虑了各风电场的频率支撑动能约束与RoCoF约束,可以在最小化风电场频率支撑量的前提下,保证系统频率与RoCoF不越限,同时不会造成个别风电场过度参与频率支撑而引起的系统频率二次跌落。模型3在模型2的基础上进一步对各风电场的参数进行优化分配,在保证系统频率稳定性的同时提升了参数配置的合理性。
采用三种参数整定模型的风电场的转速与功率增量变化曲线如图13所示。从图13中可以看出,当风电场采用模型1的参数时,风电场W1的有功功率增量要远大于W2与W3,各风电场频率支撑量的分配极其不均匀。由于W1的控制参数过大,其在频率支撑阶段过度释放动能,造成了较大幅度的系统频率二次跌落。而模型2使得各风电场的频率支撑量的分配相对均匀,进而避免了严重的二次跌落,但风电场W1与W2的有功功率增量仍要远大于W3。模型3对参数进一步优化分配,降低了各风电场运行点偏移的影响,提升了各风电场频率支撑性能。
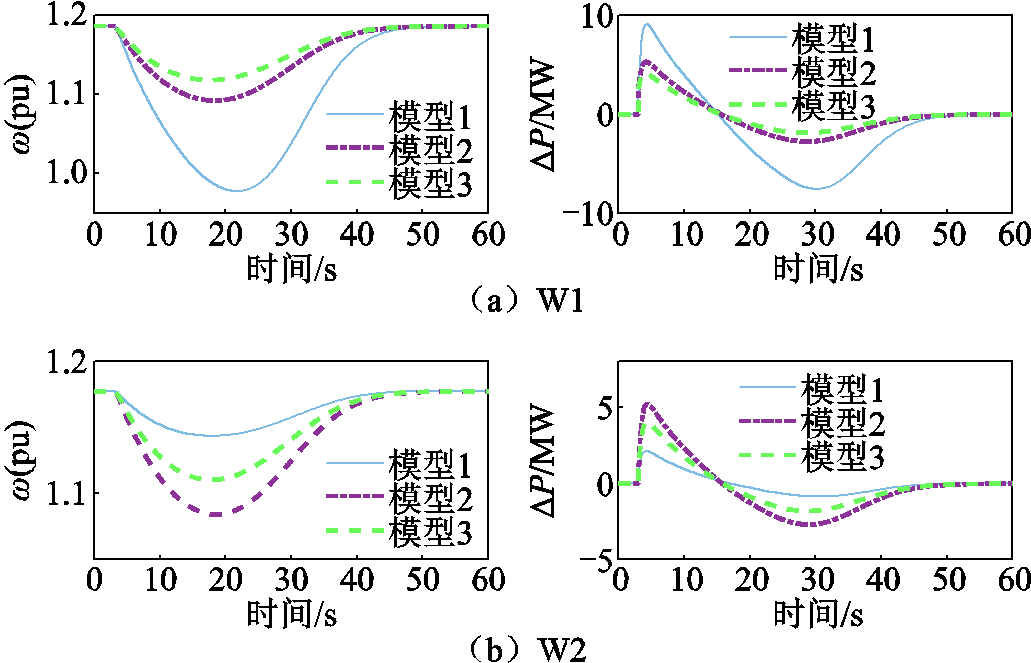
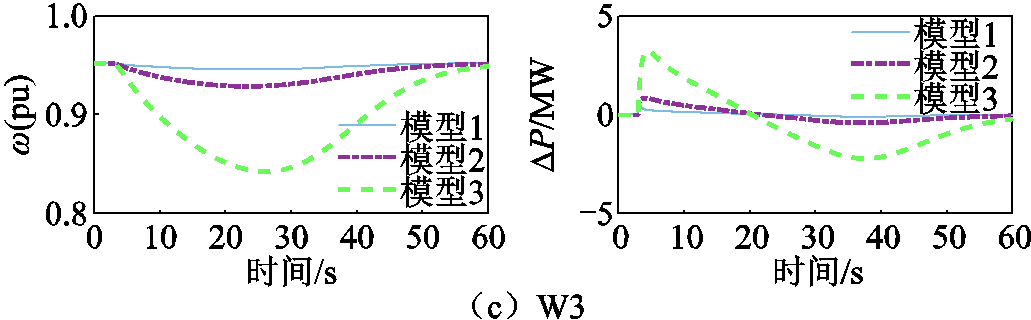
图13 39节点算例中不同参数整定模型下风电场的转速与功率变化曲线
Fig.13 Rotational speed and active power increment of wind farms with different parameter configuration models in the 39-bus system
本文基于中国中部地区某省级电网规划数据分析所提频率支撑控制策略与参数整定方法的有效性,其拓扑如图14所示。为简化计算,将测试系统中相邻风电场进行整合,最终整合为6个等值风电场,每个风电场采用单台风机替代,其位置如图14所示。测试系统中的直流的总容量为8 000 MW,同步机组装机容量为14 000 MW,风电场的装机容量为10 080 MW,光伏电站的装机容量为2 861 MW。在研究本文所提的控制策略及优化模型时,将扰动类型置为有功负荷突变,功率扰动为1 000 MW。
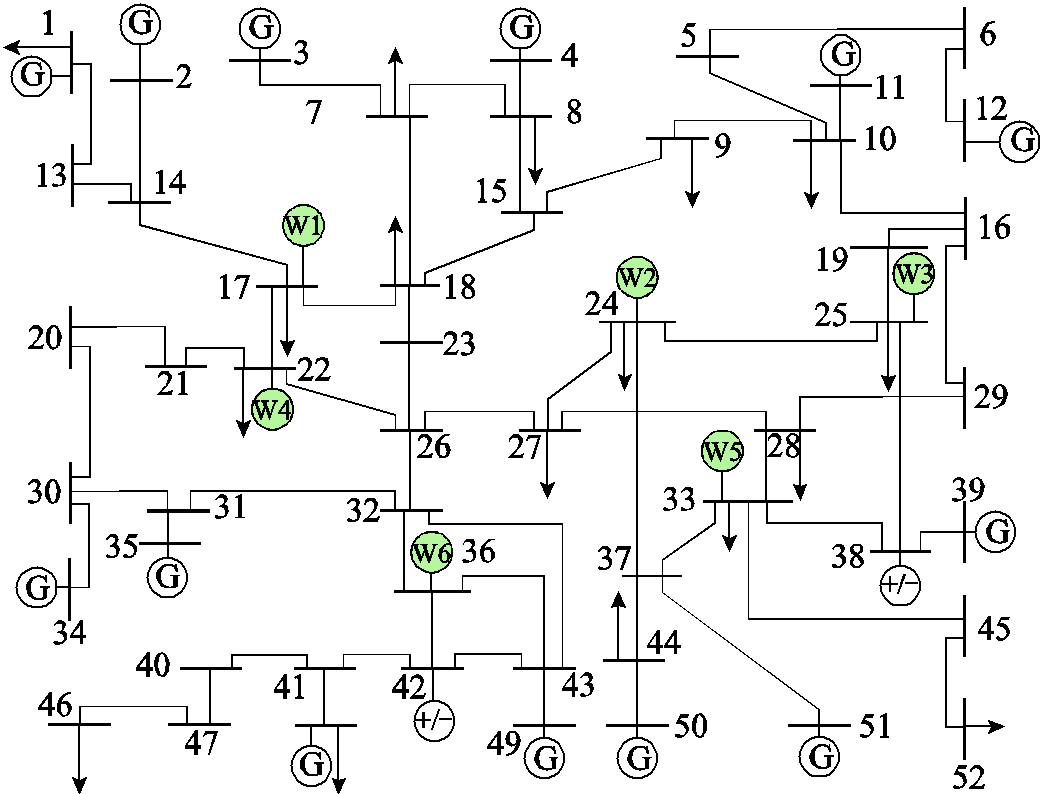
图14 中国中部地区省级电网拓扑
Fig.14 The topology of the provincial power grid in central China
为验证本文所提方法在多风电场不同风速下的频率支撑效果,本文在测试系统中构建了多风速场景,风电场W1~W6的风速依次为10.70、9.16、7.36、8.39、9.66、10.11 m/s。该测试场景中,同步机出力为10 500 MW,光伏出力为2 861 MW,风电出力为5 107.7 MW。本节采用与4.2节相同的控制策略进行验证。采用上述三种控制策略的系统频率仿真结果、风电场的转速曲线和风电场的功率增发曲线如图15~图17所示。
图15 省级电网算例中不同控制策略的仿真结果
Fig.15 Simulation results of different control strategies in the provincial power grid
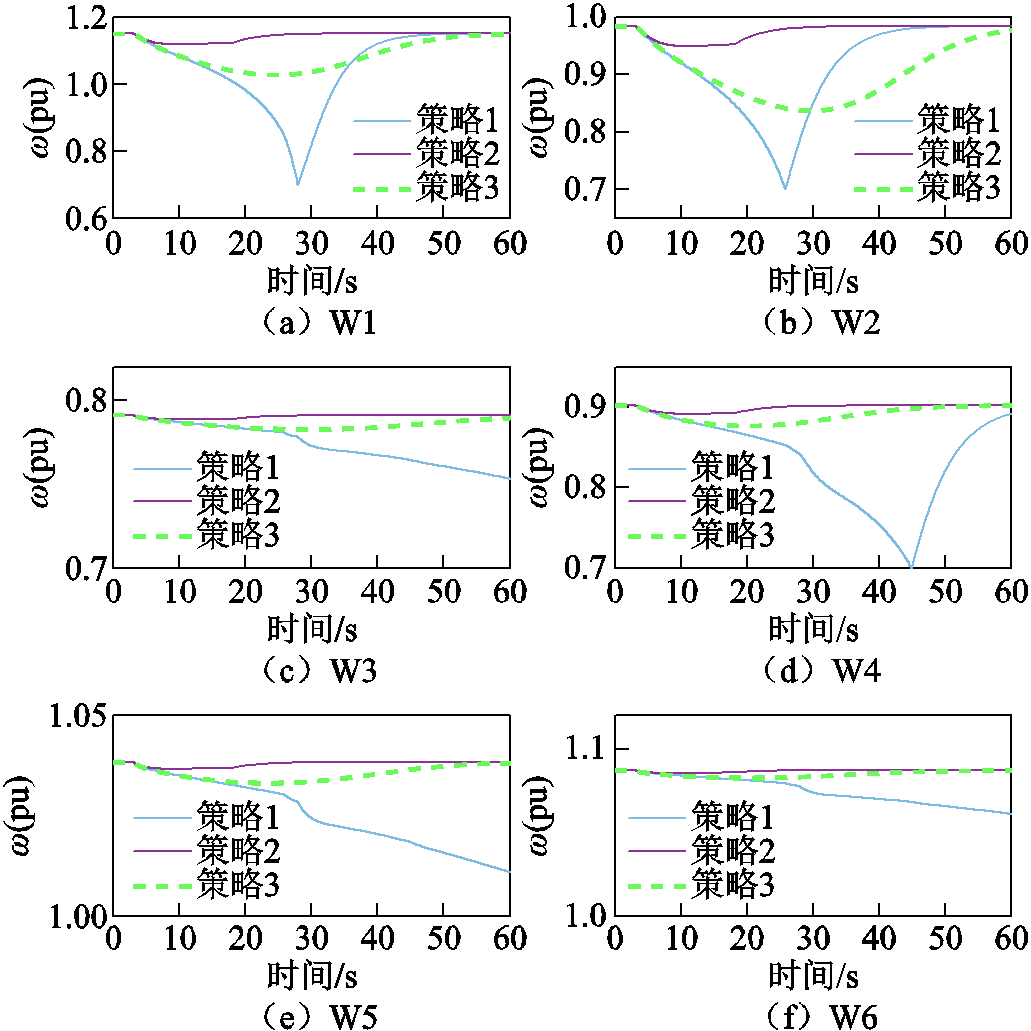
图16 省级电网算例中不同控制策略下风电场的转速曲线
Fig.16 Rotational speed of wind farms with different strategies in the provincial power grid
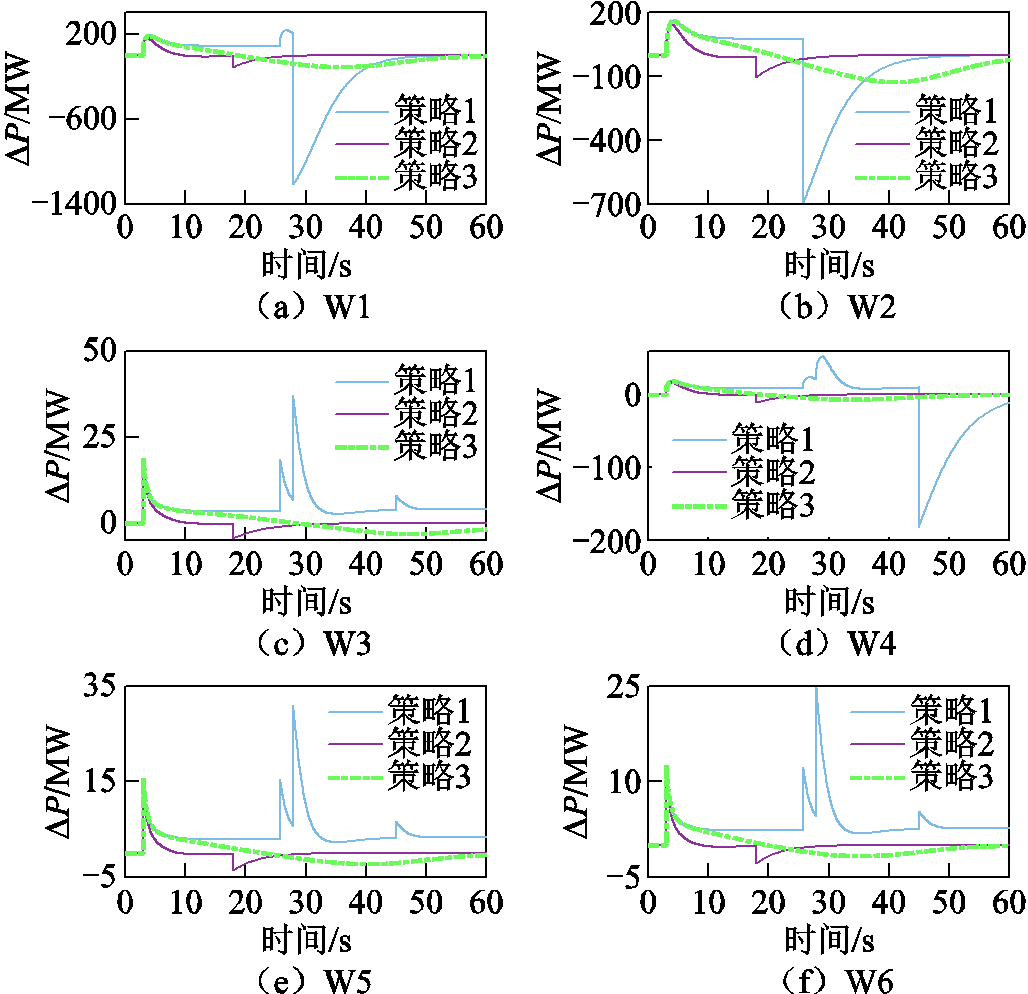
图17 省级电网算例中不同控制策略下风电场的增发功率曲线
Fig.17 Active power increment of wind farms with different strategies in the provincial power grid
从图16和图17中可以看出,采用策略1的风电场会在转速恢复阶段产生较大的功率骤变,这会导致系统出现严重的二次跌落,频率跌落至49.453 Hz,并且导致RoCoF跌至-0.751 Hz/s。采用策略2的风电场无法在频率支撑阶段为系统频率提供足够的支撑,导致该阶段的频率跌落至49.791 Hz。并且风电场退出频率支撑时形成的功率骤变也会引起系统频率二次跌落,频率跌落至49.835 Hz。然而,控制策略3在频率支撑的初始阶段关闭了MPPT控制,使得系统所需风电场提供的频率支撑能量能够被准确量化,将系统频率维持在安全阈值内。在系统频率到达最低点后,依据风机转速与故障时刻初始转速之间的差值自适应地减少风电场输出,使风机进入转速恢复状态,并且在风机转速进入恢复阶段后依据转速自适应地减小频率支撑控制参数,减少系统频率跌落量,降低二次跌落对系统频率的影响。
本节采用与4.4节相同的参数整定模型进行验证。三种优化模型得到的控制参数见表4。采用上述三种参数整定模型的风电场对系统的频率支撑效果、风电场的转速曲线和风电场的增发功率曲线如图18~图20所示。如图18所示,模型1未考虑能量约束,导致风电场W3与W4的下垂控制参数过大,过大的参数导致在频率支撑阶段后期风电场已无剩余的转子动能支撑系统频率,转速随着转子动能的释放完毕而达到限值,转而进入转速恢复状态并引起系统频率的二次跌落,最终频率跌落至49.815 Hz。并且,由于未考虑RoCoF约束,风电场的惯性控制参数过小,无法将RoCoF限制在阈值内,最大RoCoF达到了-0.537 Hz/s。而模型2综合考虑了各风电场的频率支撑动能约束,使得各风电场的下垂控制参数能够匹配各自的风速,不会使风电场的转子动能过度释放,故降低了二次跌落对系统频率的影响。同时,模型2考虑了RoCoF约束,其整定参数使得风电场对RoCoF的支撑作用得到了明显提升。模型3在模型2的基础上考虑风电场偏离初始运行点,将偏移量最小化可进一步提升转速恢复阶段的系统频率动态性能。
表4 省级电网算例中不同模型的参数整定结果及频率指标
Tab.4 Parameter configuration results and frequency indexes of different models in the provincial power grid
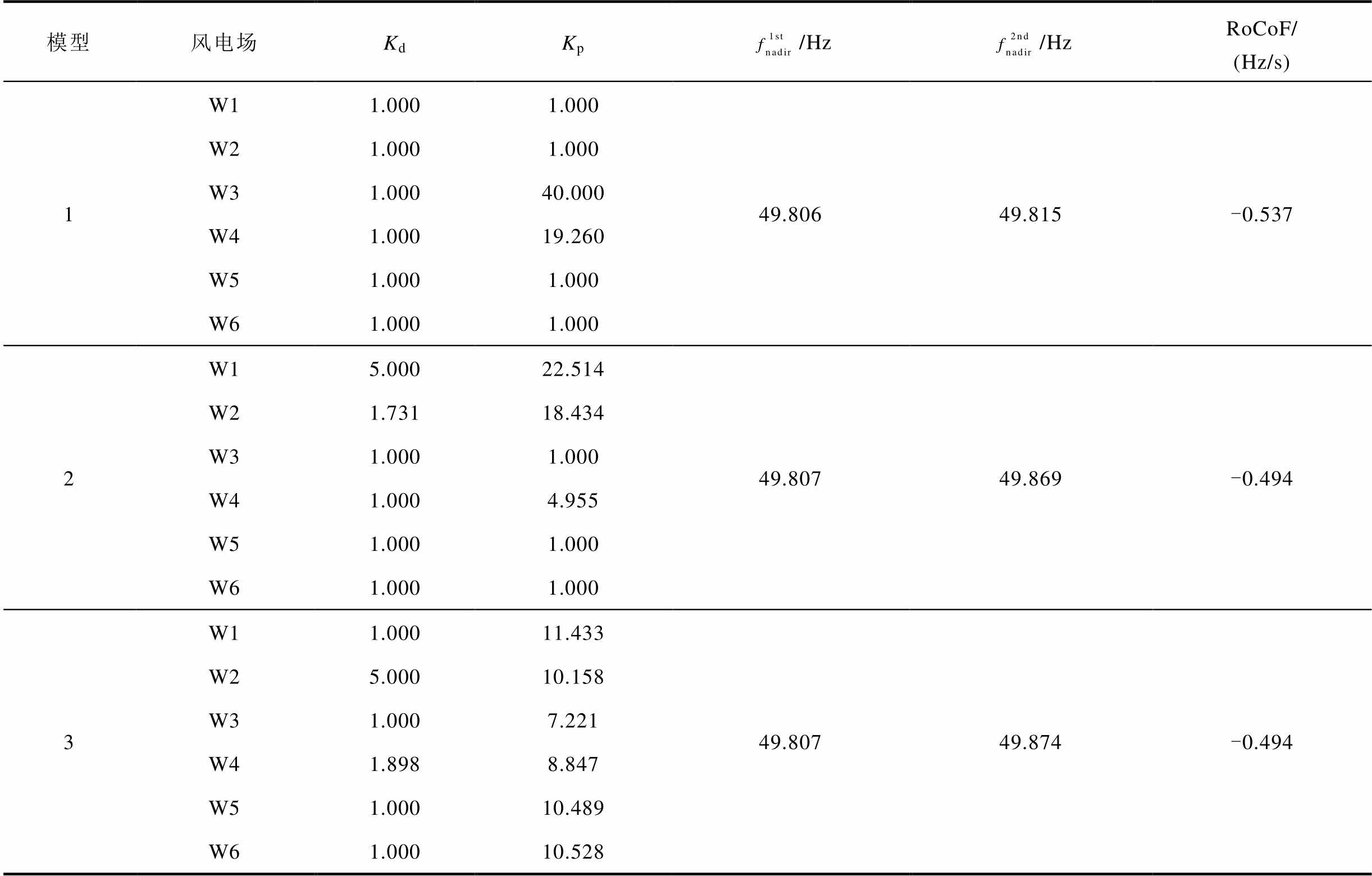
模型风电场KdKp/Hz/HzRoCoF/(Hz/s) 1W11.0001.00049.80649.815-0.537 W21.0001.000 W31.00040.000 W41.00019.260 W51.0001.000 W61.0001.000 2W15.00022.51449.80749.869-0.494 W21.73118.434 W31.0001.000 W41.0004.955 W51.0001.000 W61.0001.000 3W11.00011.43349.80749.874-0.494 W25.00010.158 W31.0007.221 W41.8988.847 W51.00010.489 W61.00010.528
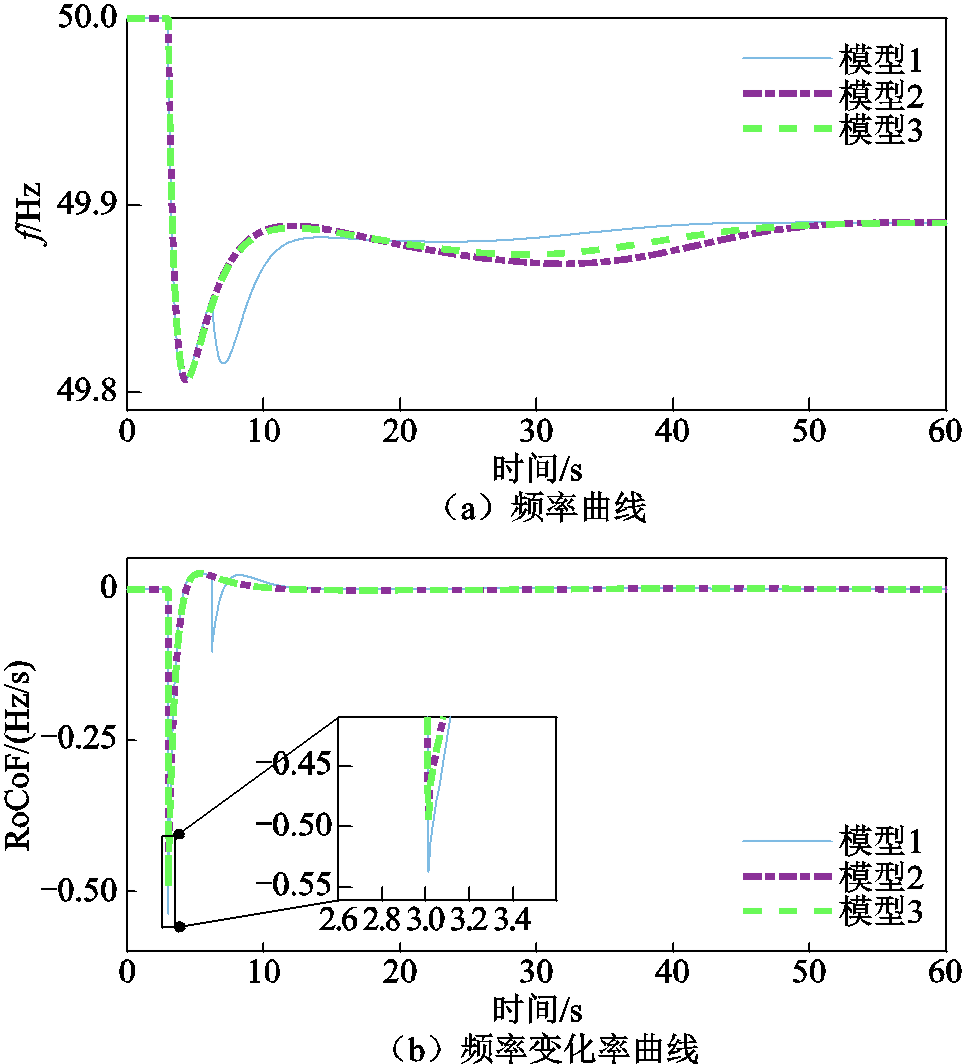
图18 省级电网算例中不同参数整定模型的仿真结果
Fig.18 Simulation results of different parameter configuration models in the provincial power grid
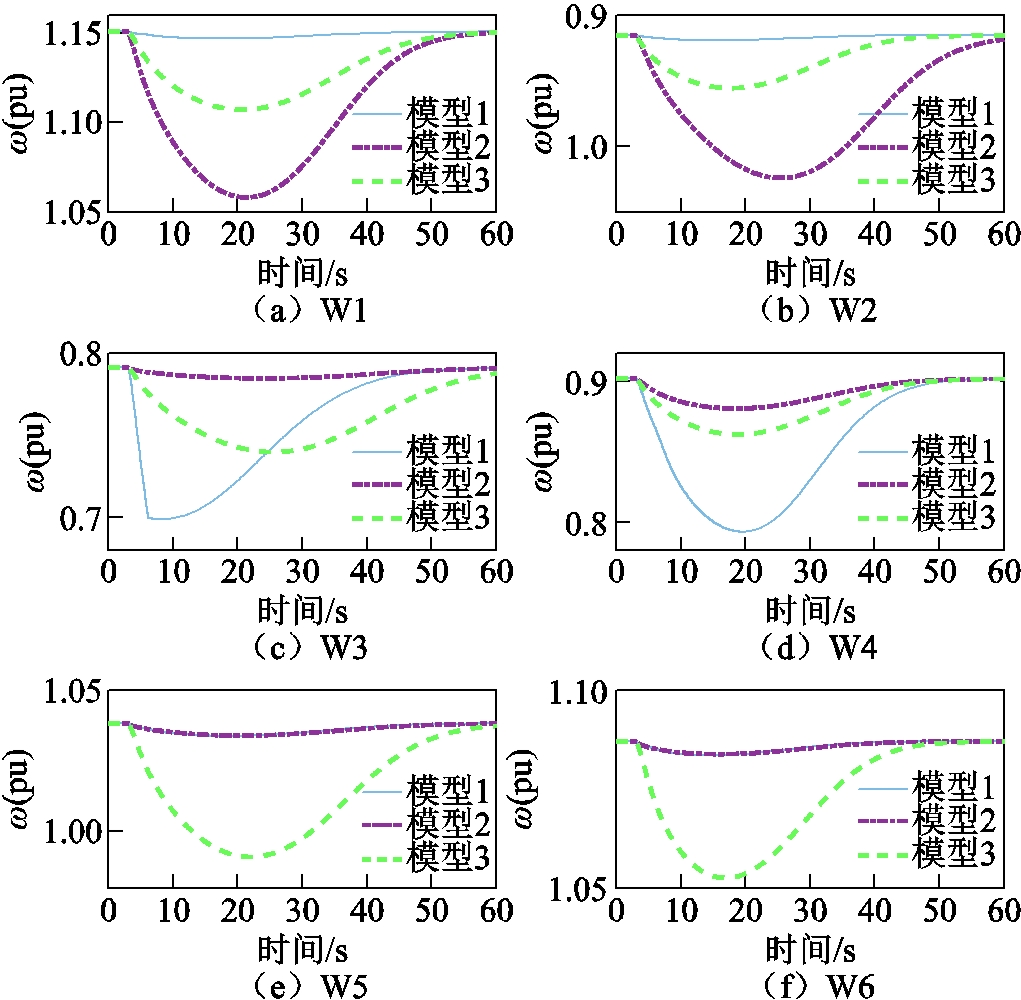
图19 省级电网算例中不同参数整定模型下风电场的转速曲线
Fig.19 Rotational speed of wind farms with different parameter configuration models in the provincial power grid
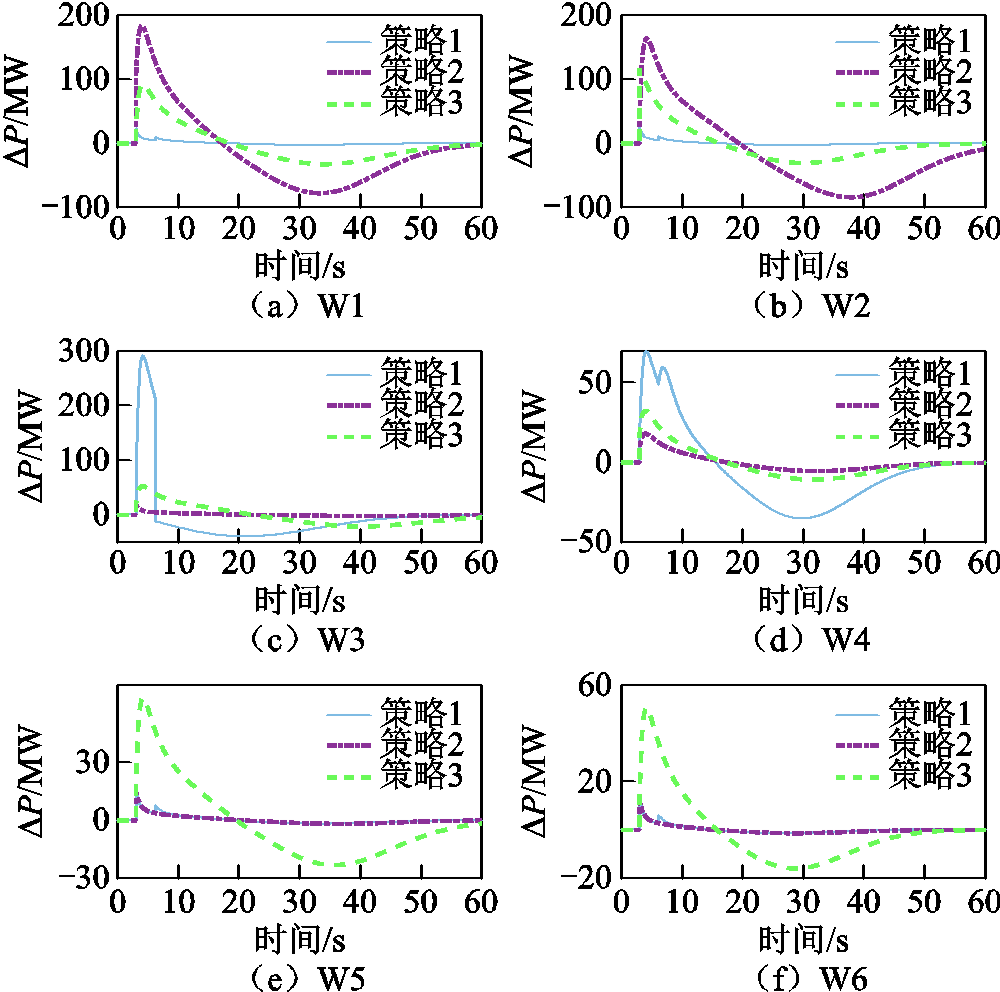
图20 省级电网算例中不同参数整定模型下风电场的增发功率曲线
Fig.20 Active power increment of wind farms with different parameter configuration odels in the provincial power grid
风电场的转速与增发功率变化曲线如图19、图20所示。从图中可以看出,当风电场采用模型1的参数时,风电场W3的有功功率增量要远大于其余5个风电场。并且由于W3的控制参数过大,其在频率支撑阶段过度释放动能,导致在6.19 s被迫启动了转速恢复,造成了较为严重的频率二次跌落。而模型2使得各风电场的频率支撑量的分配相对均匀,进而避免了严重的二次跌落,但风电场W1与W2的有功功率增量仍要大于其余4个风电场。模型3对控制参数进一步优化,使得各风电场的参数配置更为合理,提升了系统频率支撑能力。
为克服风电场在参与系统频率支撑过程中的频率二次跌落问题,本文设计出一种兼顾频率支撑能力与转速平滑恢复的风机频率支撑控制策略及其参数整定方法,首先在频率支撑初期阶段关闭风机MPPT控制使其充分参与频率支撑;其次待系统频率达到最低点后自适应降低风电功率输出,使风机进入转速恢复状态,同时在转速开始恢复后自适应减小频率支撑控制参数,避免功率骤变对系统频率造成的不利影响。为此,本文推导出能统一不同阻尼比的系统频率响应时域表达式,并计算出系统频率最低点时间。然后,计算风机在不同风速下所能用于频率支撑的最大支撑动能,结合动能约束与RoCoF约束,以风机频率支撑控制量最小为目标对控制参数进行初步整定,再以风机在频率支撑期间偏移量最小为目标对控制参数进一步优化。IEEE 30节点系统与实际系统的仿真算例验证了本文所提的风机频率支撑控制策略及其参数整定方法的有效性。
参考文献
[1] 杨超, 李东翰, 雷显帅, 等. 虚拟惯量控制对直驱风电机组载荷影响的分析及评估[J]. 电力系统自动化, 2024, 48(7): 258-266. Yang Chao, Li Donghan, Lei Xianshuai, et al. Analysis and evaluation of impact of virtual inertia control on load of direct-drive wind turbine[J]. Automation of Electric Power Systems, 2024, 48(7): 258-266.
[2] 胡石阳, 刘国荣. 基于虚拟同步机的新能源并网智能控制研究[J]. 电气技术, 2022, 23(10): 10-17. Hu Shiyang, Liu Guorong. Research on intelligent control of grid connected new energy based on virtual synchronous machine[J]. Electrical Engineering, 2022, 23(10): 10-17.
[3] 张冠锋, 杨俊友, 孙峰, 等. 基于虚拟惯量和频率下垂控制的双馈风电机组一次调频策略[J]. 电工技术学报, 2017, 32(22): 225-232. Zhang Guanfeng, Yang Junyou, Sun Feng, et al. Primary frequency regulation strategy of DFIG based on virtual inertia and frequency droop control[J]. Transactions of China Electrotechnical Society, 2017, 32(22): 225-232.
[4] 穆钢, 蔡婷婷, 严干贵, 等. 双馈风电机组参与持续调频的双向功率约束及其影响[J]. 电工技术学报, 2019, 34(8): 1750-1759. Mu Gang, Cai Tingting, Yan Gangui, et al. Bidirectional power constraints and influence of doubly fed induction generator participating in continuous frequency regulation[J]. Transactions of China Electrotechnical Society, 2019, 34(8): 1750-1759.
[5] 江一航, 赵书强, 王慧, 等. 计及风电、调相机支撑特性的频率安全约束分布鲁棒机组组合调度方法[J]. 电工技术学报, 2025, 40(1): 80-95. Jiang Yihang, Zhao Shuqiang, Wang Hui, et al. Distributionally robust frequency constrained unit commitment with frequency support of wind power and synchronous condenser[J]. Transactions of China Electrotechnical Society, 2025, 40(1): 80-95.
[6] 辛悦, 彭乔, 刘天琪, 等. 基于周期性最大功率点检测的风电机组功率备用控制方法[J]. 电力自动化设备, 2024, 44(2): 103-109, 116. Xin Yue, Peng Qiao, Liu Tianqi, et al. Power reserve control method of wind turbine units based on periodic maximum power point measurement[J]. Electric Power Automation Equipment, 2024, 44(2): 103-109, 116.
[7] 黄晟, 凌吉莉, 魏娟, 等. 大规模风电机群服役质量调控方法研究综述[J]. 电工技术学报, 2025, 40(10): 3274-3300. Huang Sheng, Ling Jili, Wei Juan, et al. A review of regulation method of service quality of large-scale wind farm[J]. Transactions of China Electrotechnical Society, 2025, 40(10): 3274-3300.
[8] 颜湘武, 宋子君, 崔森, 等. 基于变功率点跟踪和超级电容器储能协调控制的双馈风电机组一次调频策略[J]. 电工技术学报, 2020, 35(3): 530-541. Yan Xiangwu, Song Zijun, Cui Sen, et al. Primary frequency regulation strategy of doubly-fed wind turbine based on variable power point tracking and supercapacitor energy storage[J]. Transactions of China Electrotechnical Society, 2020, 35(3): 530-541.
[9] 彭海涛, 何山, 袁至, 等. 基于改进转子转速和桨距角协调控制的变速风电机组一次调频策略[J]. 电力自动化设备, 2023, 43(9): 87-94. Peng Haitao, He Shan, Yuan Zhi, et al. Primary frequency regulation strategy for variable-speed wind turbines based on improved coordinated control of rotor speed and pitch angle[J]. Electric Power Automation Equipment, 2023, 43(9): 87-94.
[10] Zhang Wei, Fang Kailun. Controlling active power of wind farms to participate in load frequency control of power systems[J]. IET Generation, Transmission & Distribution, 2017, 11(9): 2194-2203.
[11] 李可心, 安军, 石岩, 等. 基于可用调频能量的风电机组综合虚拟惯性控制参数整定[J]. 电工技术学报, 2025, 40(5): 1382-1394. Li Kexin, An Jun, Shi Yan, et al. An integrated virtual inertia control parameter setting method for wind turbine based on available frequency regulation energy[J]. Transactions of China Electrotechnical Society, 2025, 40(5): 1382-1394.
[12] Prasad R, Padhy N P. Synergistic frequency regulation control[J]. IEEE Transactions on Energy Conversion, 2020, 35(4): 181-3191.
[13] 乔颖, 郭晓茜, 鲁宗相, 等. 考虑系统频率二次跌落的风电机组辅助调频参数确定方法[J]. 电网技术, 2020, 44(3): 807-815. Qiao Ying, Guo Xiaoqian, Lu Zongxiang, et al. Parameter setting of auxiliary frequency regulation of wind turbines considering secondary frequency drop [J]. Power System Technology, 2020, 44(3): 807-815.
[14] Hajiakbari Fini M, Hamedani Golshan M E. Determining optimal virtual inertia and frequency control parameters to preserve the frequency stability in islanded microgrids with high penetration of renewables[J]. Electric Power Systems Research, 2018, 154: 13-22.
[15] 王鑫, 杨德健. 基于变系数PI控制的双馈风电机组自适应转速恢复策略[J]. 电工技术学报, 2023, 38(15): 4120-4129. Wang Xin, Yang Dejian. Adaptive speed recovery strategy of doubly-fed induction generator based on variable PI control coefficient[J]. Transactions of China Electrotechnical Society, 2023, 38(15): 4120-4129.
[16] Garmroodi M, Verbič G, Hill D J. Frequency support from wind turbine generators with a time-variable droop characteristic[J]. IEEE Transactions on Sustainable Energy, 2018, 9(2): 676-684.
[17] 赵冬梅, 宋晨铭, 冯向阳, 等. 100%新能源场景下考虑频率稳定约束的源网荷储一体化系统储能优化配置[J]. 电工技术学报, 2025, 40(7): 2146-2161.Zhao Dongmei, Song Chenming, Feng Xiangyang, et al.The optimal configuration of energy storage in the source-grid-load-storage integrated system considering frequency stability constraints in 100% new energy scenarios[J].Transactions of China Electrotechnical Society, 2025, 40(7): 2146-2161.
[18] Carpintero-Renteria M, Santos-Martin D, Lent A, et al. Wind turbine power coefficient models based on neural networks and polynomial fitting[J]. IET Renewable Power Generation, 2020, 14(11): 1841-1849.
[19] Barzegar-Kalashani M, Seyedmahmoudian M, Mekhilef S, et al. Small-scale wind turbine control in high-speed wind conditions: a review[J]. Sustainable Energy Technologies and Assessments, 2023, 60: 103577.
[20] Liu Hui, Wang Peng, Zhao Teyang, et al. A group-based droop control strategy considering pitch angle protection to deloaded wind farms[J]. Energies, 2022, 15(8): 2722.
[21] 李世春, 申骜, 程绪长, 等. 提升惯量响应与转速恢复的风储协调惯量控制方法[J]. 电网技术, 2023, 47(4): 1570-1580. Li Shichun, Shen Ao, Cheng Xuchang, et al. Wind-storage coordinated inertia control for improving inertia response and rotor speed recovery[J]. Power System Technology, 2023, 47(4): 1570-1580.
[22] 张龙, 孙丹, 张旭, 等. 计及工作点偏移的减载风电系统频率响应模型[J]. 电力系统自动化, 2024, 48(16): 79-87. Zhang Long, Sun Dan, Zhang Xu, et al. System frequency response model of deloaded wind power system considering working point shifting[J]. Automation of Electric Power Systems, 2024, 48(16): 79-87.
[23] Bastiani B A, de Oliveira R V. Adaptive MPPT control applied to virtual synchronous generator to extend the inertial response of type-4 wind turbine generators[J]. Sustainable Energy, Grids and Networks, 2021, 27: 100504.
[24] 牛景瑶, 王德林, 喻心, 等. 提高风电消纳水平的低惯性电网参数优化[J]. 电机与控制学报, 2022, 26(2): 111-120. Niu Jingyao, Wang Delin, Yu Xin, et al. Parameter optimization of low inertia power system to improve wind power consumption level[J]. Electric Machines and Control, 2022, 26(2): 111-120.
[25] 国家质量监督检验检疫总局, 中国国家标准化管理委员会. 电能质量电力系统频率偏差: GB/T 15945—2008[S]. 北京: 中国标准出版社, 2008.
[26] Wen Jiaxin, Bu Siqi, Li Fangxing, et al. Risk assessment and mitigation on area-level RoCoF for operational planning[J]. Energy, 2021, 228: 120632.
[27] 国家市场监督管理总局, 国家标准化管理委员会. 并网电源一次调频技术规定及试验导则: GB/T 40595—2021[S]. 北京: 中国标准出版社, 2021.
Abstract Wind power exhibits varying frequency support capabilities for power systems under different wind speed scenarios. The kinetic energy available for frequency support from wind power, along with the alignment of the control strategy and its parameters, significantly impacts the system frequency dynamic. For wind turbines utilizing rotor energy control, the effectiveness of the power feedback loop in responding to changes in system frequency is influenced by the magnitude of the virtual inertia and droop control parameters. If these control parameters are set too low, wind turbines will have a minimal impact on supporting system frequency. Conversely, if parameters are set too high, wind turbines may trigger speed protection due to a rapid decrease in rotational speed during the primary frequency regulation period, ultimately leading to a secondary drop in system frequency. To enhance the stability and sustainability of wind power participation in frequency support, this paper proposed a control strategy and parameter configuration method that emphasizes smooth speed recovery for wind turbines.
Firstly, after the system frequency reaches its nadir, wind turbines adaptively reduce their active output to enter a speed recovery state. Concurrently, frequency support control parameters are adjusted based on the state of speed recovery to mitigate any adverse effects on the system frequency. By analyzing the deviation from the initial operating point during the frequency support period of wind turbines, the minimum kinetic energy loss at different speeds is calculated, determining the maximum frequency support energy available. Next, the time-domain expression for the system frequency response model is derived, incorporating the contributions of synchronous generators and wind power in frequency support, and unifying the calculation formula for frequency extreme points across varying damping ratios. Following this, optimization models are established based on frequency security constraints and wind turbine frequency support energy constraints. These models aim to minimize both the frequency support from wind turbines and the deviations from initial operating points, thereby facilitating the configuration of control parameters for each wind farm during fault scenarios. Finally, the effectiveness of the proposed method is validated through simulations involving the IEEE 30-bus system and an actual power grid.
From the simulation analysis, the following conclusions can be drawn: (1) The all-damping SFR model proposed in this paper exhibits minimal calculation errors for the maximum frequency deviation in both over-damping and under-damping conditions, with the frequency dynamics following disturbances aligning closely with actual engineering outcomes. (2) The control strategy presented herein disables MPPT control during the initial phase of frequency support, allowing wind farms to provide sufficient assistance to the system frequency. Once the system frequency reaches its nadir, the output from wind farms is adaptively reduced, enabling wind turbines to transition into a speed recovery state. As turbine speeds enter the recovery phase, the frequency support control parameters are gradually decreased, preventing abrupt power changes and significant secondary drops. (3) The parameter optimization model takes into account the available kinetic energy of wind turbines and the rate of change of frequency. The first stage of the optimization model prioritizes frequency support from wind turbines as the objective function, while the second stage aims to minimize deviations from the initial positions of the turbines. This approach mitigates the impact of operating point deviations for each wind farm, thereby enhancing overall system frequency performance.
keywords:Wind farm, frequency support control, parameter configuration, speed recovery, secondary drop
DOI: 10.19595/j.cnki.1000-6753.tces.250393
中图分类号:TM712
国家自然科学基金(52077066)和湖南省杰出青年基金(2024JJ2022)资助项目。
收稿日期 2025-03-12
改稿日期 2025-04-27
张 超 男,1994年生,博士研究生,研究方向为新能源主动支撑能力需求评估。E-mail:chaozhang94@126.com
文云峰 男,1986年生,教授,博士生导师,研究方向为低惯量电力系统规划、运行与控制。E-mail:yunfeng.868l@163.com(通信作者)
(编辑 赫 蕾)