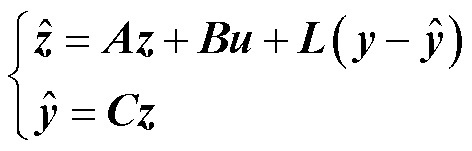
图1 Vienna整流器电路拓扑
Fig.1 Circuit topology of Vienna rectifier
摘要 针对传统有限矢量集模型预测控制(FCS-MPC)固有架构导致的相邻周期内可能产生几乎相同的控制动作、冗余迭代寻优繁琐的问题,为加速模型预测方法的收敛过程并避免冗余迭代寻优,该文设计一种面向三电平Vienna整流器的双闭环复合控制方案,其核心在于融合了事件驱动型模型预测控制(ET-MPC)与线性自抗扰(LADRC)外环。首先,根据Vienna状态空间模型建立了事件驱动表达方程,阐明了事件触发阈值对收敛速率和并网性能的作用机制,基于系统实时状态反馈,设定电流跟踪误差阈值作为触发条件,显著降低了计算负担和开关频率。其次,在深入探究LADRC与PI控制的等效原理上,揭示了两者参数设计的关联性规律,采用LADRC电压外环有效地抑制了直流电压超调,提升了系统的抗扰能力与鲁棒性。最后,通过仿真及实验,将所提策略与传统有限控制集模型预测控制(FCS-MPC)进行了多维度对比。结果表明,所提方法在保障并网性能的同时,可有效减少开关动作次数、抑制直流电压超调,并展现出优异的动态响应特性。
关键词:Vienna整流器 模型预测控制 事件驱动 线性自抗扰
与常规的两电平变流器相比,三电平六开关型Vienna整流器具有谐波含量低、网侧功率因数高、直流侧电压输出范围宽、利于储能系统模块化集成等优势,常被用作电动汽车高压直流快充电源等直流供电系统的核心单元[1]。提高Vienna整流装置直流侧输出电压的稳定性、实现中点电位平衡控制以及复杂工况下的高效电能变换并网性能并减小开关损耗等多目标优化对于提高电动汽车高压大容量充电场景下的电能变换系统的运行性能,进而消除电动汽车里程与充电焦虑等方面都具有广泛的应用与经济价值[2-7]。
然而,作为一种强耦合的非线性时变系统,Vienna整流装置因其多输入、多输出的特殊架构,使该系统对外界扰动和与内部参数变化均展现出高度敏感性。采用传统线性控制方法时,并网性能对控制器参数及系统数学模型的精确性要求较高[8-9]。微处理器及现代控制理论的发展为电气设备高效高质控制带来了新的发展方向,随着新能源汽车产业的发展,关于Vienna整流器的非线性控制方法近年来也受到广大学者的广泛关注[10-12]。由于其具有无需精确的数学模型、可实现多目标优化、无需载波等优点,有限矢量集模型预测控制(Finite Control Set-Model Predictive Control, FCS-MPC)逐步被广泛应用于现代电气传动领域控制系统[13],通过设定目标函数,在单开关周期内通过遍历所有可能的开关序列,进而选取目标函数最小所对应的开关脉冲驱动开关器件,在实现并网变换器网侧电流优化控制的同时可兼顾中点电位平衡等多种性能改进[14-15]。
但是,传统 FCS-MPC 算法需在每个中断周期执行一次优化计算,不仅导致冗余计算量过大,也提高了对处理器性能的要求[16-17]。此外,FCS-MPC在相邻周期内可能由于跟踪误差变化不大而导致相邻周期内产生几乎相同的控制动作且带来了额外的功率损耗,冗余迭代计算量大造成开关器件的高频化应用与控制系统计算量之间存在矛盾[18-19]。针对上述FCS-MPC应用中面临的关键问题,文献[20]结合矢量区间划分,通过优选中点电位平衡的冗余小矢量的方式有效地消除了中点电位波动。文献[21]考虑每个电压矢量控制效果,通过施加约束条件舍弃部分电压矢量,以此减少MPC寻优迭代次数,进而降低系统计算量。文献[22]利用与当前时刻电压矢量相邻的四组电压矢量作为候选矢量集,在下一时刻执行模型预测控制寻优计算,从而降低冗余预测寻优次数。上述方法均以减少候选控制矢量个数的方式规避冗余寻优计算,但相邻控制周期内仍会出现相同的预测寻优操作。为减小开关损耗,文献[23]提出了一种事件驱动(Event Triggered, ET)的控制方式,利用跟踪误差滞环的思想引入误差阈值判断避免冗余迭代。
此外,在传统的双闭环控制结构中,电压外环通常采用PI控制器以跟踪给定参考信号。然而,该方法的系统输出性能高度依赖精确的数学模型,且其参数不易精准确定。为克服PI控制器的上述局限,韩京清研究员创新性的建立了自抗扰控制(Active Disturbance Rejection Control, ADRC)理论。高志强博士针对ADRC应用中存在参数整定复杂及稳定性证明困难等问题,结合PI控制器参数整定方法在传统ADRC的基础上进一步扩展出线性自抗扰控制(Linear ADRC, LADRC),更加广泛地拓展了LADRC的应用。其中,文献[24]创新性地提出了一种基于自适应LADRC的PWM双闭环控制环路,极大地增强了系统抗干扰能力。文献[25]通过在线性扩张观测器中引入比例环节与滤波环节增强了系统抗干扰性与鲁棒性。文献[26]在LADRC中引入滑模控制策略,将滑模控制结合运用到状态误差反馈律中用以减小反馈补偿误差,提升控制系统的鲁棒性。文献[27]采用LADRC外环估算给定参考电流,并结合MPC算法改善了系统动态响应性能。然而,MPC过程计算资源负担过大、考虑开关频率多目标优化等问题并未能解决,且上述文献中LADRC参数整定较为复杂,并未明确LADRC与传统PI控制器参数之间的关联性规律。
针对上述问题,本文设计了一种面向三电平Vienna整流器的双闭环复合控制方案,其核心融合了事件驱动型模型预测控制(ET-MPC)与线性自抗扰(LADRC)外环。首先,根据系统工作状态与性能要求设定跟踪误差阈值作为驱动条件,当输出状态满足触发条件时进入FCS-MPC迭代寻优,否则将保持原有开关控制信号输出以规避冗余迭代,降低开关损耗。其次,在深入探究LADRC与PI控制的等效原理上,揭示了PI与LADRC参数设计的关联性规律,电压外环通过采用一阶LADRC有效地改善了动态性能并降低了系统超调。最后,通过构建仿真模型与实验验证平台进行了完整的、系统的理论验证分析,充分验证了文中先进控制方法的可靠性与优越性。
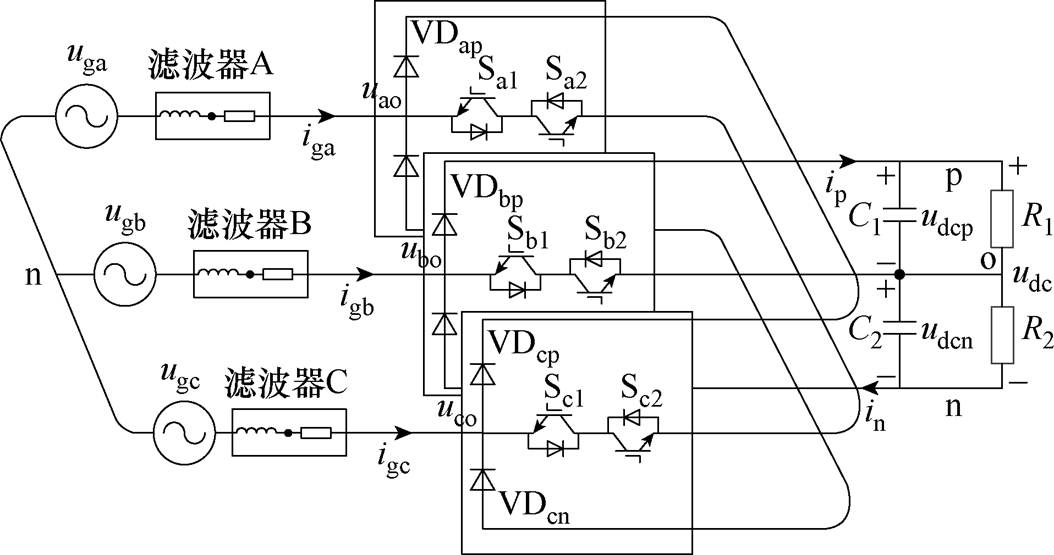
文中所采用的六开关型Vienna整流器电路拓扑如图1所示。ugx(x=a, b, c)为网侧电压,uxo为端电压,igx为网侧电流,L为滤波升压电感,R为寄生电阻,Sx1和Sx2为反向串联开关管构成的双向电流开关,udc为直流母线电压,udcp、udcn为直流侧上、下母线电容电压。
图1 Vienna整流器电路拓扑
Fig.1 Circuit topology of Vienna rectifier
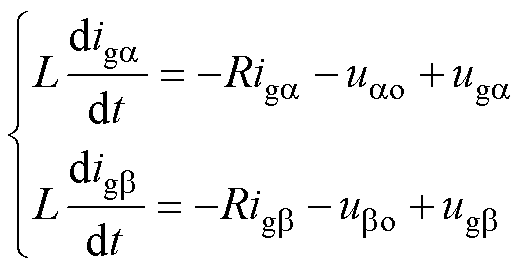
根据图1电路结构,结合基尔霍夫定理构建Vienna整流器在两相静止ab坐标系下的状态空间模型为
 (1)
(1)
式中,iga, igb、uga, ugb分别为a轴、b轴下的电流、电压分量;uao、ubo为a轴和b轴下的三相端电压 分量。
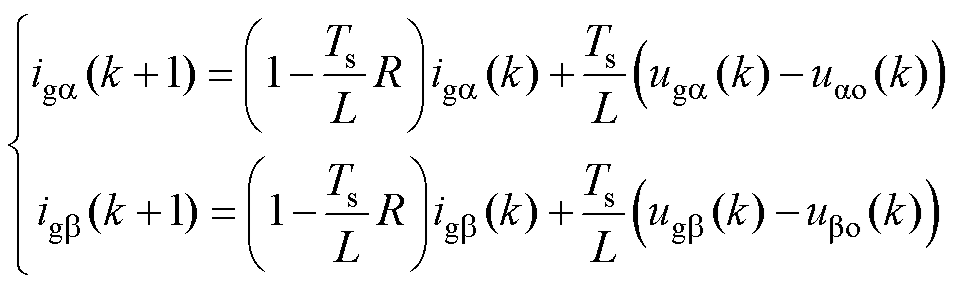
根据前向欧拉法离散化,式(1)推导可得到在t=(k+1)Ts时刻跟踪预测电流值的表达式为
 (2)
(2)
式中,Ts为开关周期;iga(k+1)和igb(k+1)为a轴和b轴的电流预测值。
利用跟踪电流误差二次方和的衡量标准构造价值函数,遍历控制集中的所有矢量并执行滚动寻优,通过选取代价函数最小所对应的开关序列驱动开关管。当不考虑中点电位平衡控制时,选取网侧电流跟踪误差作为代价函数g(i),表达式为
 (3)
(3)
式中, 、
、 为电压外环控制器计算得到的跟踪电流参考值。
为电压外环控制器计算得到的跟踪电流参考值。
文中所提出的事件驱动型预测算法在一定程度上可类比于通过引入误差滞环的思想实现了条件触发机制,其中ET机制的工作原理是在每个控制周期内不会重复向MPC策略输送系统状态x(ti),而是在触发时刻t∈[ti, ti+1 内根据误差阈值
内根据误差阈值 进行判定,当系统跟踪误差大于事件驱动阈值时,则进入MPC迭代寻优,当系统跟踪误差小于事件驱动阈值时,此时则维持上一时刻PWM开关脉动,直到下一个触发时刻来临。其中ti+1表示满足触发条件的时刻,当t=ti+1时,重复上述环节。触发时刻ti与ti+1的关系为
进行判定,当系统跟踪误差大于事件驱动阈值时,则进入MPC迭代寻优,当系统跟踪误差小于事件驱动阈值时,此时则维持上一时刻PWM开关脉动,直到下一个触发时刻来临。其中ti+1表示满足触发条件的时刻,当t=ti+1时,重复上述环节。触发时刻ti与ti+1的关系为
 (4)
(4)
式中,Tet为系统预设的采样步长;N为触发机制执行的次数,直到再次满足触发条件。
假定单开关周期内的系统状态控制量u(ti)保持不变,MPC算法不执行。在此定义状态误差e(t)表达式为
 (5)
(5)
为了保证系统输入的稳定性(Input State Stability, ISS),此时状态误差应满足
 (6)
(6)
式中, 、
、 为k∞类函数。根据状态误差的定义以及式(6)输入稳定性约束,事件驱动条件的设计可分为三个步骤。
为k∞类函数。根据状态误差的定义以及式(6)输入稳定性约束,事件驱动条件的设计可分为三个步骤。
1)确立Vienna整流器状态空间模型
根据式(1),将三相Vienna整流器状态空间方程重写为
 (7)
(7)
式中
2)触发阈值上界推导
状态误差范数是决定是否触发MPC 寻优计算的关键指标。结合误差范数e(t)与式(7)所示的Vienna状态空间方程,在t∈[ti, ti+1时刻下进行推导可得
 (8)
(8)
为简化触发条件设计,根据三相Vienna整流器拓扑原理,将 化简为
化简为
 (9)
(9)
式中,Em为输出相电压峰值,一般取为 。
。
由式(9),进一步化简式(8)得
 (10)
(10)
定义参考函数 ,式(9)可转化为
,式(9)可转化为
 (11)
(11)
当ti时刻满足系统事件触发条件时,系统可实现无静差跟踪,即ti时刻的跟踪误差近似为0,此时系统满足 ,给出式(11)的解为
,给出式(11)的解为
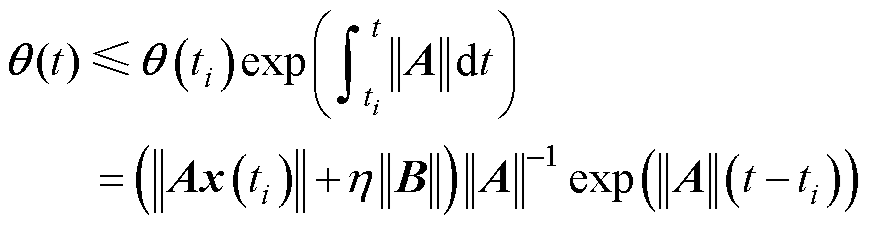 (12)
(12)
将 的定义代入式(12),可得到
的定义代入式(12),可得到 的上界为
的上界为
 (13)
(13)
3)触发条件确立
当到达下一触发时刻ti+1时,通过联立式(4)与式(13),生成事件驱动条件表达式为
 (14)
(14)
为保证系统稳定性,式(14)需与式(6)保持形式一致,该匹配关系构成事件驱动条件的设计准则。为强化触发约束,设置参数N=1并引入调节因子 以平衡控制性能与开关损耗,最终将驱动条件重构为
以平衡控制性能与开关损耗,最终将驱动条件重构为
 (15)
(15)
为了证明文中控制环路设计的可靠性,结合Lyapunov稳定性定理可知,存在一个平滑可微的函数V(x)满足方程
 (16)
(16)
 (17)
(17)
式中,f(x(t),u(t))表示式(7)描述的系统模型; 、
、 、
、 为k∞类函数,触发条件满足式(6),故有
为k∞类函数,触发条件满足式(6),故有
 (18)
(18)
式中, 为系统状态的调整系数,其取值越小,事件触发灵敏度越高。综合式(6)和式(18),式(17)推导为
为系统状态的调整系数,其取值越小,事件触发灵敏度越高。综合式(6)和式(18),式(17)推导为
 (19)
(19)
由上述推导可知,对于任意时刻t∈[0,∞),系统存在满足Lyapunov稳定性条件的函数。
LADRC控制器的核心结构是线性扩张状态观测器(Linear Extended State Observer, LESO)与线性状态误差反馈律(Linear State Error Feedback, LSEF)。其中,LESO对内部与外部扰动进行观测,得到总扰动的估计值,LSEF综合扰动估计值进行前馈补偿并获取控制信号。典型的一阶结构框图如图2所示。
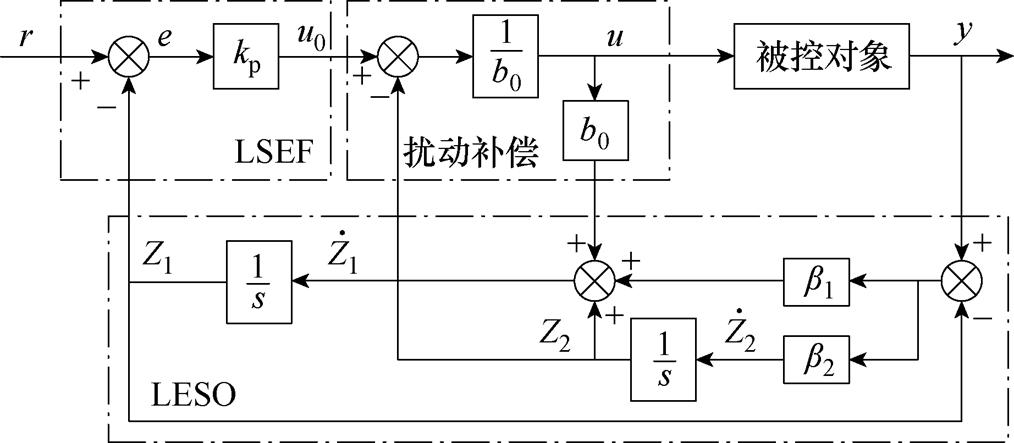
图2 LADRC结构框图
Fig.2 LADRC structure diagram
三电平Vienna整流器为一阶被控对象,则LADRC控制器形式可表示为
 (20)
(20)
式中,y为系统输出量,为外部扰动,y受外部扰动作用;u为输入控制变量,其增益系数为b0;f(y,)为总扰动项,综合了系统内外部干扰。引入扩张状态 ,设x2=f(y,),x1=y,可将式(20)表示为扩张状态空间形式为
,设x2=f(y,),x1=y,可将式(20)表示为扩张状态空间形式为
 (21)
(21)
设 为扩张状态
为扩张状态 的估计值,其中
的估计值,其中
 ,基于式(21)构建状态扩张观测器,其龙伯格观测器表达式为
,基于式(21)构建状态扩张观测器,其龙伯格观测器表达式为
 (22)
(22)
其中
式中,L为线性扩张状态观测器的增益。
联立式(21)和式(22),建立一阶LADRC状态空间表达式为
 (23)
(23)
式中, 为一阶系统的参考值,其值为
为一阶系统的参考值,其值为 ;K为状态误差反馈控制律的增益
;K为状态误差反馈控制律的增益 。依据带宽设计原则,为保障系统稳定运行,通常将线性扩张状态观测器(LESO)极点配置于其带宽
。依据带宽设计原则,为保障系统稳定运行,通常将线性扩张状态观测器(LESO)极点配置于其带宽 处。电流闭环的极点设置在被控对象带宽
处。电流闭环的极点设置在被控对象带宽 ,且
,且
 ,其公式为
,其公式为
 (24)
(24)
 (25)
(25)
系统反馈补偿控制器对输出进行动态反馈,反映了控制量u与输出量y之间的动态关系,下面推导反馈补偿控制器的传递函数C2(s)。对一阶LADRC状态空间进行进一步推导,得到
 (26)
(26)
 (27)
(27)
 (28)
(28)
基于式(28),对状态空间方程进行拉氏变换可得
 (29)
(29)
设信号r、y、u有对应拉氏变换r(s)、y(s)、u(s),结合式(27)与式(29),根据叠加定理,有
 (30)
(30)
根据式(30),可将LADRC控制器转化为二自由度的系统,其中,系统反馈补偿控制器的传递函数C2(s)表达式为
 (31)
(31)
式中,Kp为比例系数;Ki为积分系数;T为开关周期。
式(31)表明一阶LADRC从外部等效于PI控制器与一阶低通滤波器串联结构。该架构通过对系统输出y进行滤波与积分处理,理论上可有效抑制外部干扰对输出的影响,从而增强系统适应性和鲁棒性。二者参数转换关系为
 (32)
(32)
为了抑制直流侧输出电压纹波,在采用PI控制器的方案中,将电压环穿越频率设定为40 Hz。同时,通过将补偿器零点频率选为25 Hz以提升系统相位裕度。基于式(25)和式(32),可以推导出采用PI控制器对应的一阶LADRC等效参数,Vienna整流器参数见表1。
表1 Vienna整流器参数
Tab.1 Parameters of Vienna rectifier
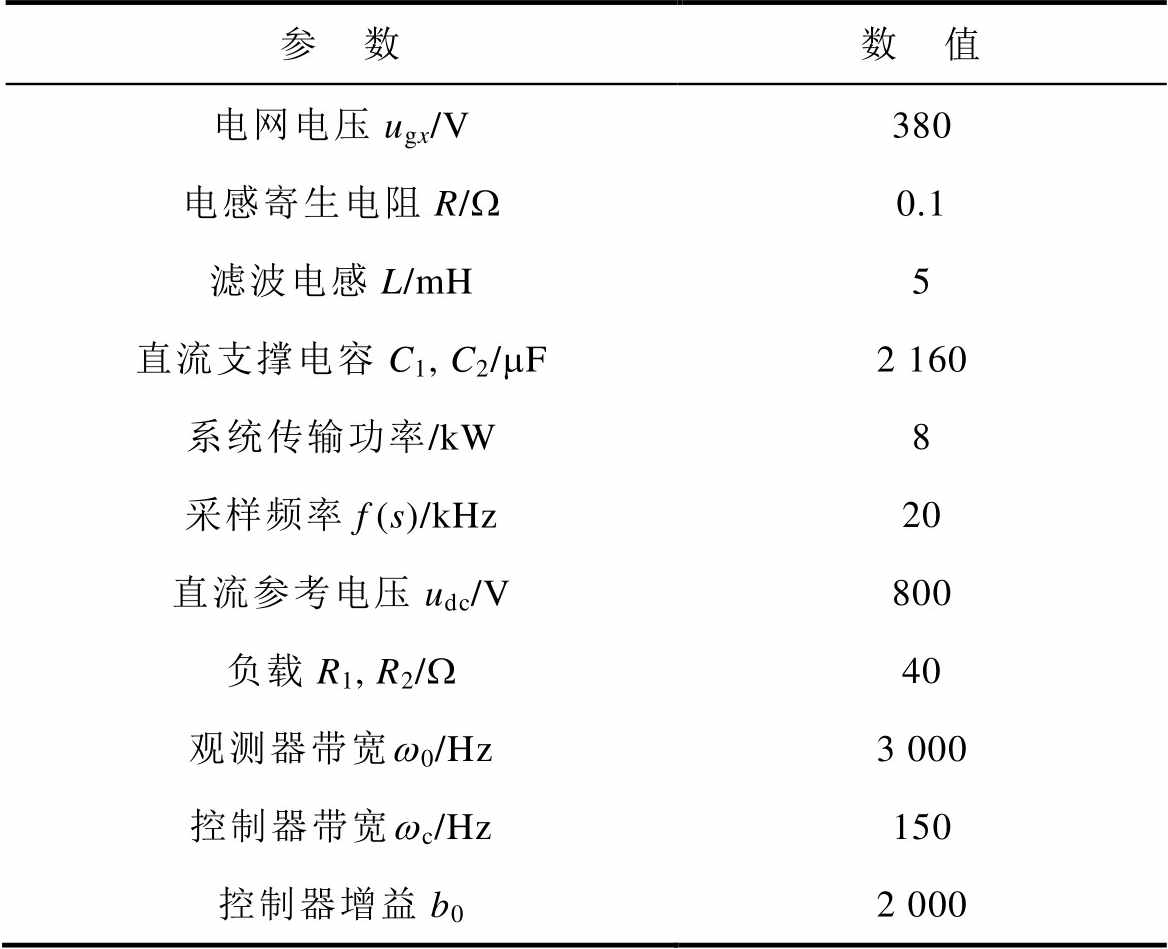
参 数数 值 电网电压ugx/V380 电感寄生电阻R/W0.1 滤波电感L/mH5 直流支撑电容C1, C2/mF2 160 系统传输功率/kW8 采样频率f(s)/kHz20 直流参考电压udc/V800 负载R1, R2/W40 观测器带宽w0/Hz3 000 控制器带宽wc/Hz150 控制器增益b02 000
结合上述分析,文中所提出的LADRC-ETMPC六开关型Vienna整流器双闭环复合控制结构如图3所示。其中,电压外环利用LADRC稳定直流侧输出电压并计算生成内环参考值,当跟踪误差阈值大于事件驱动阈值时,电流内环通过使能模型预测算法迭代寻优,更新开关状态以实现单位功率因数校正,当跟踪误差阈值小于事件驱动阈值时,开关状态维持上一开关状态,进而避免了减少冗余计算量。
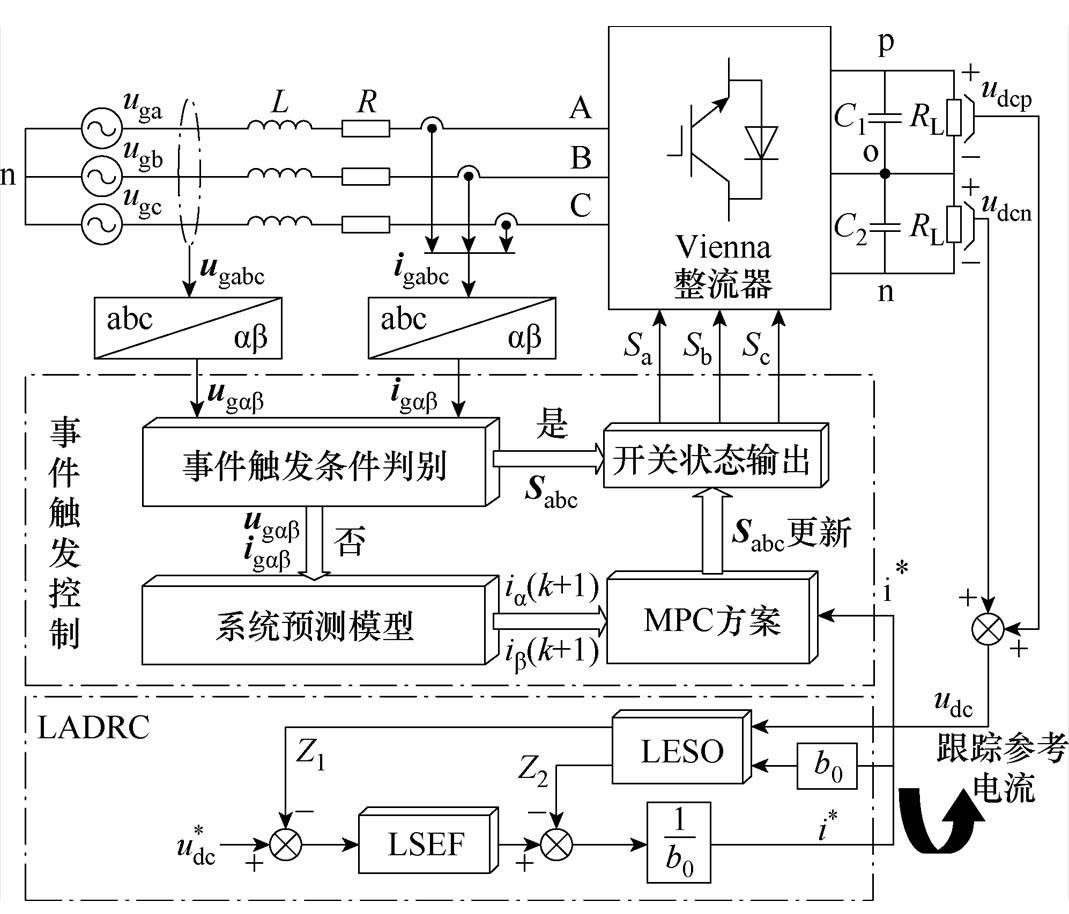
图3 LADRC-ETMPC结构框图
Fig.3 LADRC-ETMPC structure diagram
针对文中所提出的LADRC-ETMPC算法,在Matlab/Simulink仿真平台中建立了Vienna整流器完整的仿真模型,并从静态、暂态、开关脉冲等多方面进行了控制算法的验证分析。仿真中所涉及的主要电路参数见表1,仿真步长为20 ms。
截取触发阈值改变情况下系统稳态满载运行过程0.1~0.2 s时的输入端电压电流输出波形如图4所示。通过对比图4中交流输入端电压uan可以看到,伴随触发阈值的增大,端电压uan缺口逐渐增多,说明等效开关频率在不断减少,仿真结果表明,文中所提出的LADRC-ETMPC方法在保证系统控制性能要求的前提下能有效降低开关损耗。
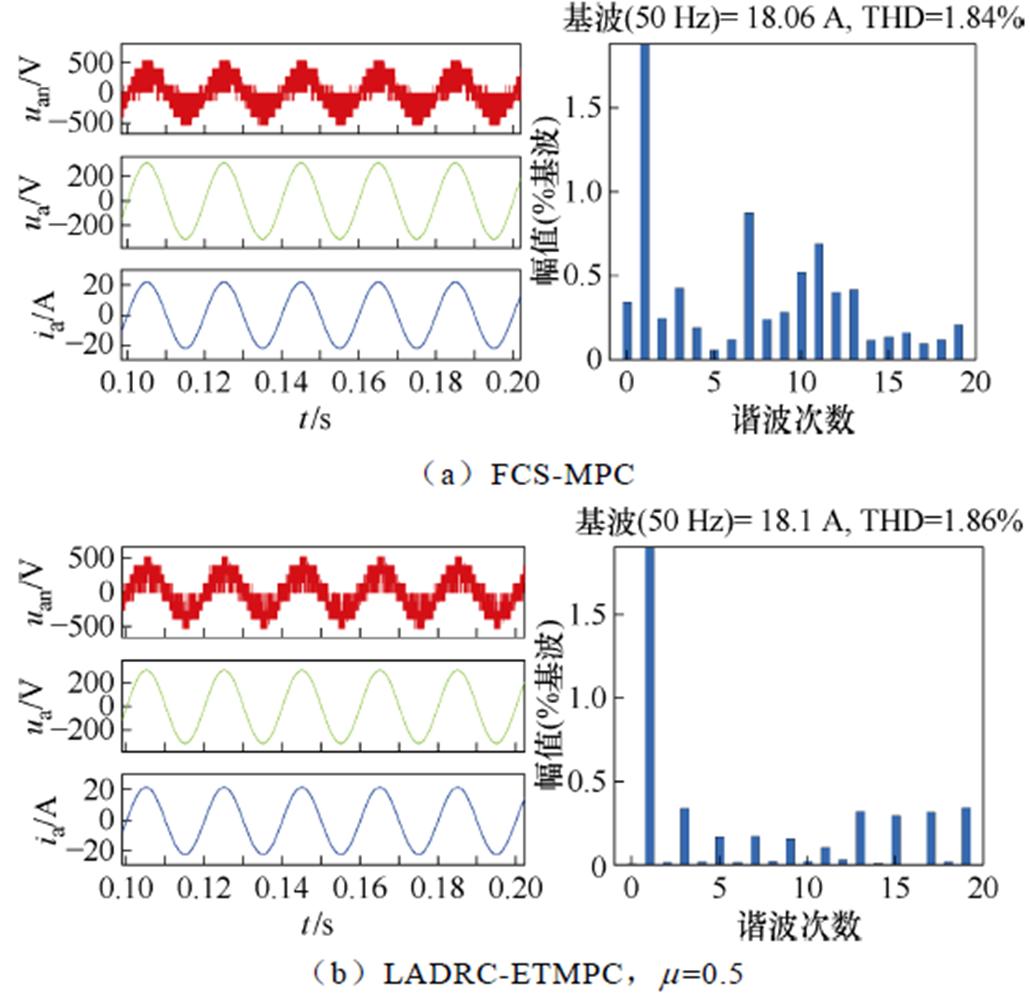
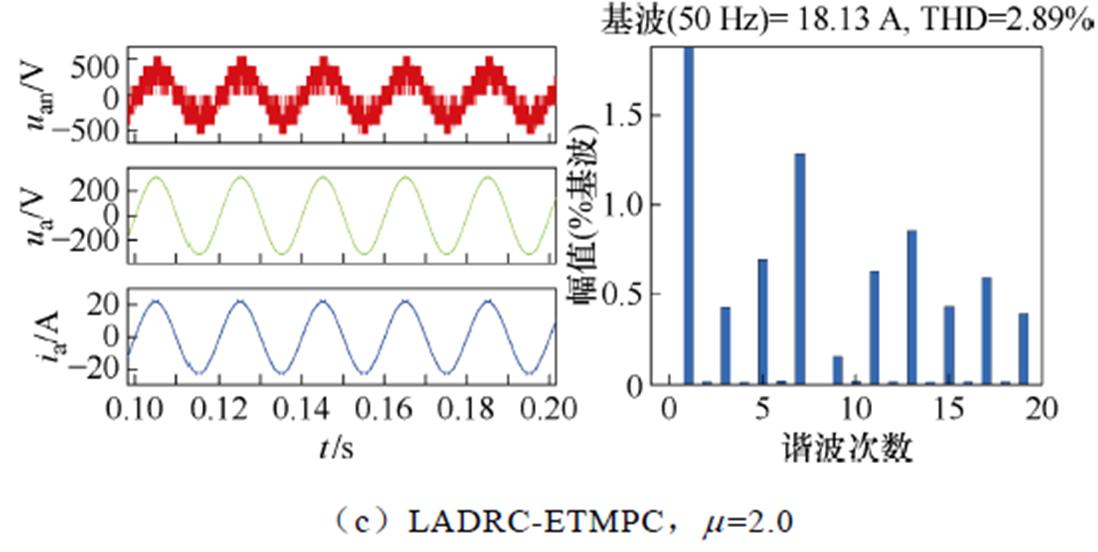
图4 触发阈值对系统交流输入端电压电流的影响
Fig.4 Effect of trigger threshold on system AC input voltage and current
图5为m与Tet变化对Vienna整流器系统性能的影响,由图5a可知,当触发周期取Tet=1 ms时,LADRC-ETMPC开关动作次数由84 114次变化到45 242次,而传统FCS-MPC开关动作次数为87 201,图5b中,总谐波畸变率(Total Harmonic Distortion, THD)随m的增大而增大,但受Tet变化的影响较小,THD变化范围在[1.84%, 7.4%]。结果表明,LADRC- ETMPC方法有效减少开关动作次数,降低开关损耗。其中,随着m与Tet的增大,误差阈值将随之增大,此时系统更易满足驱动条件。图5c给出了触发阈值m取值与中点电位跟踪误差的变化趋势,跟踪误差变化范围在[1.1, 5.9] V。可以看到,跟踪误差随m的增大而增大,但受Tet变化的影响较小。但是,触发阈值的增大会使得网侧电流THD增大,进而影响系统性能,因此控制参数m值的选取应在保证系统性能要求的前提下,本文设计的网侧电流THD满载状态下小于20%,中点电位跟踪误差百分比小于0.1%,因此综合上述因素,触发阈值取为0.2 A,实际工程应用时可尽量减少开关动作次数以降低开关损耗。
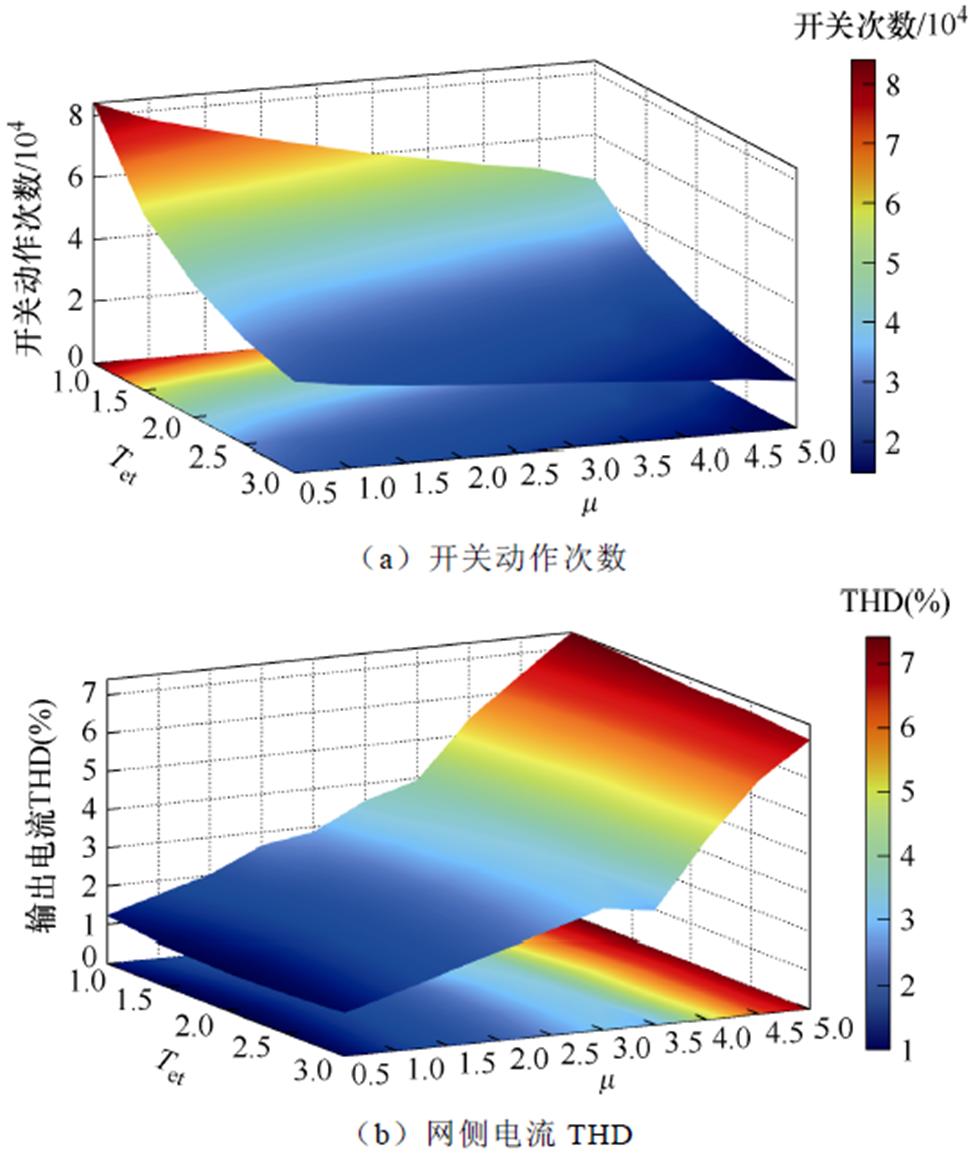
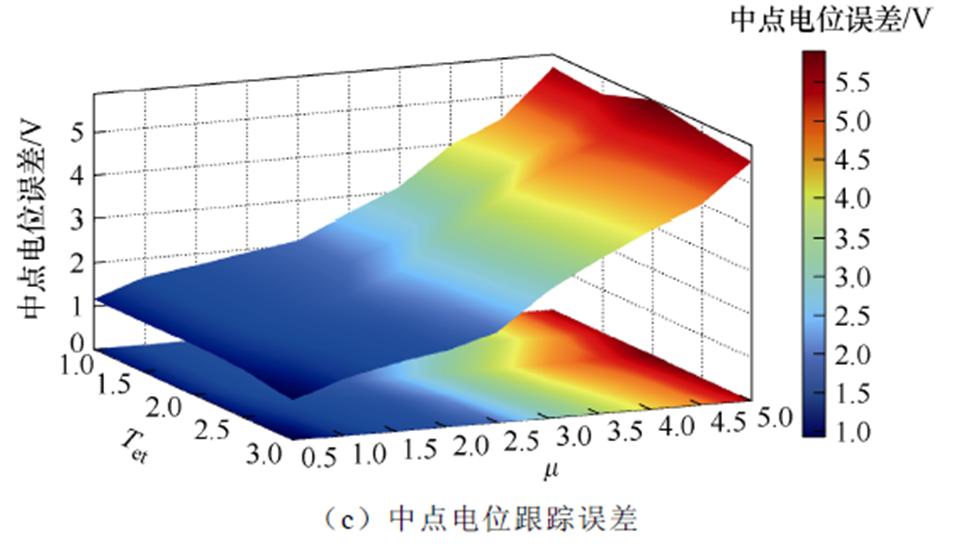
图5 m与Tet对Vienna整流器性能的影响
Fig.5 Effect of m and Tet on the performance of Vienna rectifiers
为验证一阶LADRC的暂态跟踪效果,仿真分析中设定Vienna整流系统在0.4 s时由满载运行工况切换至为半载工况,在0.5 s时再由半载恢复至满载工况,得到LADRC输出直流电压真实值与估计值对比如图6所示。在此以A相输出响应波形为例,分别给出了采用不同控制方式下直流母线电压udc以及中点电位DUC的仿真波形对比如图6~图8所示。
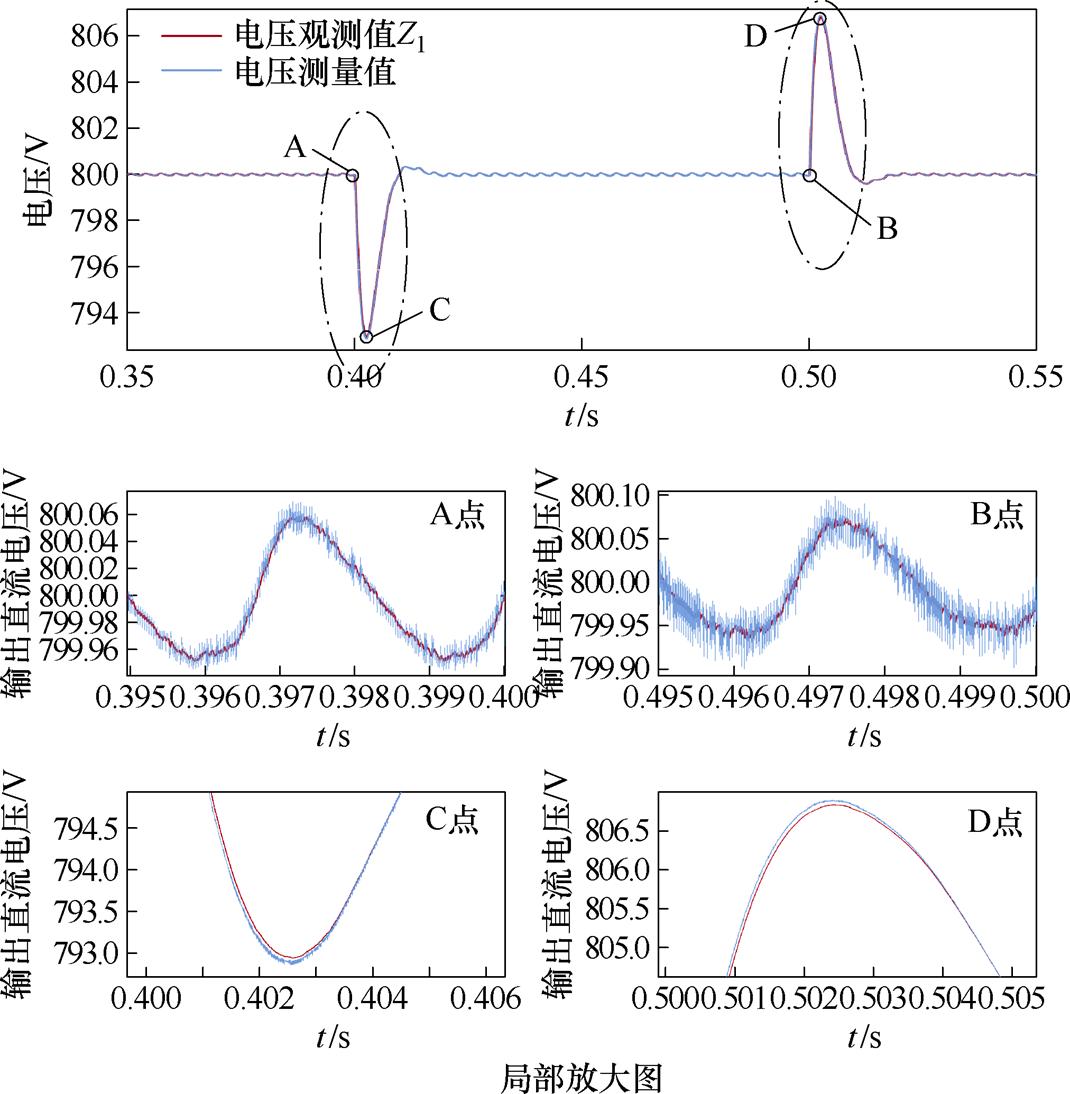
图6 LADRC输出直流电压真实值与估计值对比
Fig.6 Comparison of real and estimated values of LADRC output DC voltage
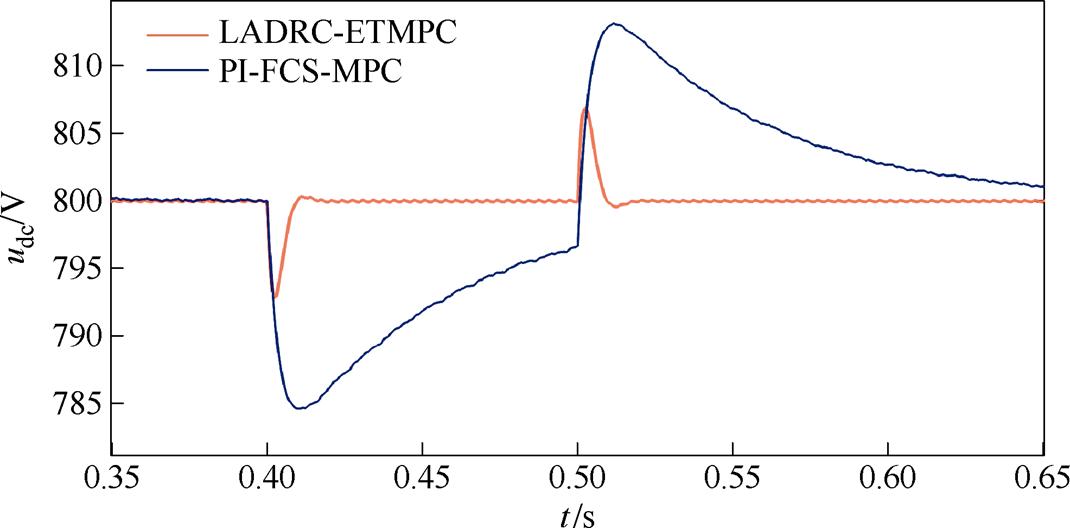
图7 直流电压输出波形对比
Fig.7 Comparison of DC voltage output waveforms
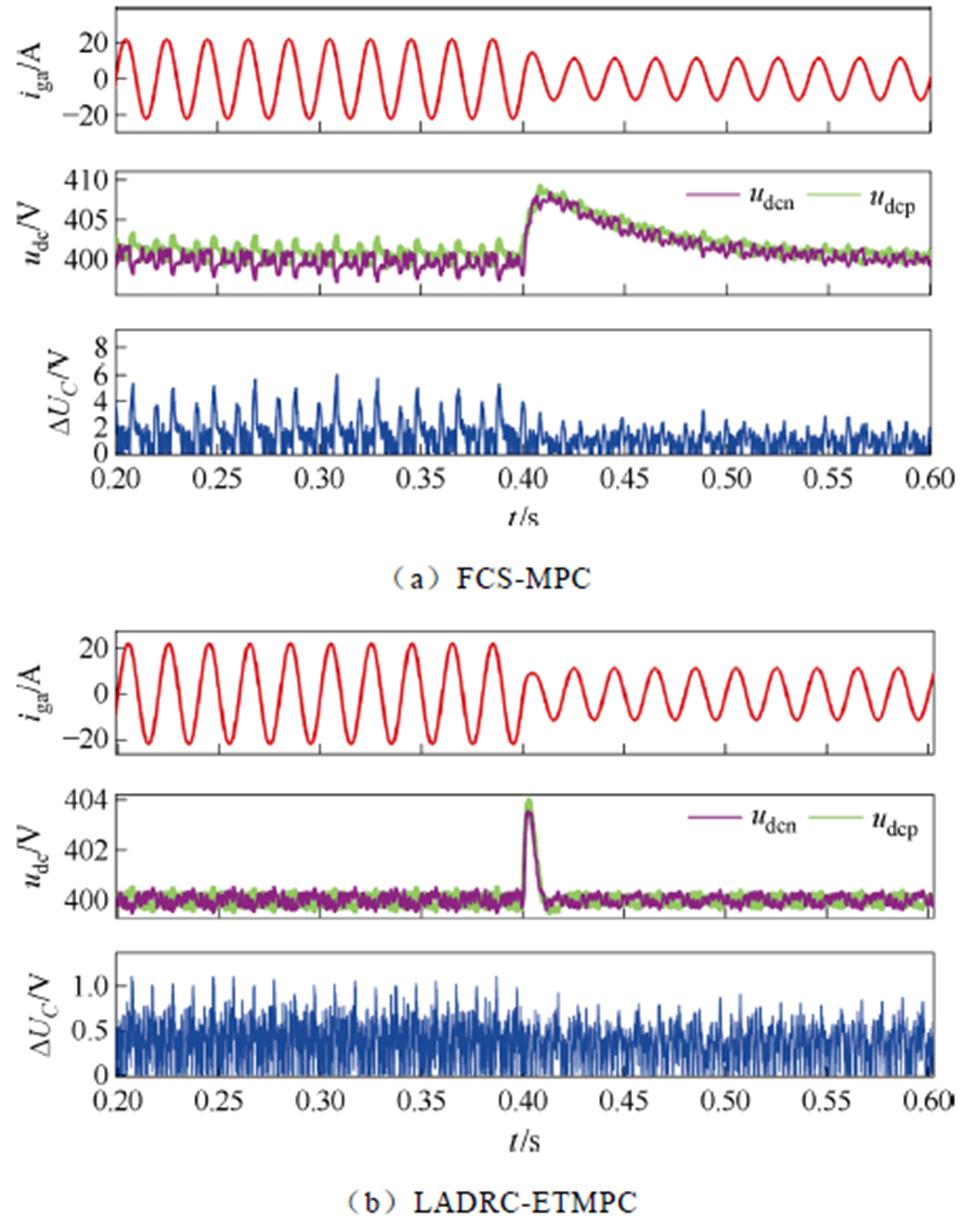
图8 暂态仿真输出
Fig.8 Transient output response
图6给出了LADRC中线性扩张观测器输出的直流电压观测值Z1与测量值y对比分析。由图6可知,LESO的估计值Z1相当于真实值y经过滤波后的值,滤除了噪声干扰,提升系统抗干扰性能,验证了LADRC设计的正确性。
负载在0.4 s时由满载切换为半载时,图8从上到下依次给出了LADRC-ETMPC、FCS-MPC两种策略下并网电流、上、下直流母线电压与中点电位仿真结果。可以看到,LADRC-ETMPC策略与FCS- MPC策略在负载突变时网侧电流动态性能基本一致,图8a中LADRC-ETMPC直流侧上、下电容电压波形重叠度高,上、下电容电压波动1 V左右。图8b中直流侧电容电压波动幅值最大5 V。通过上述对比可以看到,采用文中所提LADRC-ETMPC控制方式下的直流侧输出超调与电容电压脉动均得到显著抑制。
为了验证文中LADRC-ETMPC算法的正确性和有效性,构建了如图9所示的一台基于DSPTMS320F28335的六开关型Vienna整流电源实验样机,实验验证中所涉及的系统参数与仿真均保持一致,示波器型号为Tek3034B,电流探头型号为Tek-tcpa300,电压探头型号为P5200A。
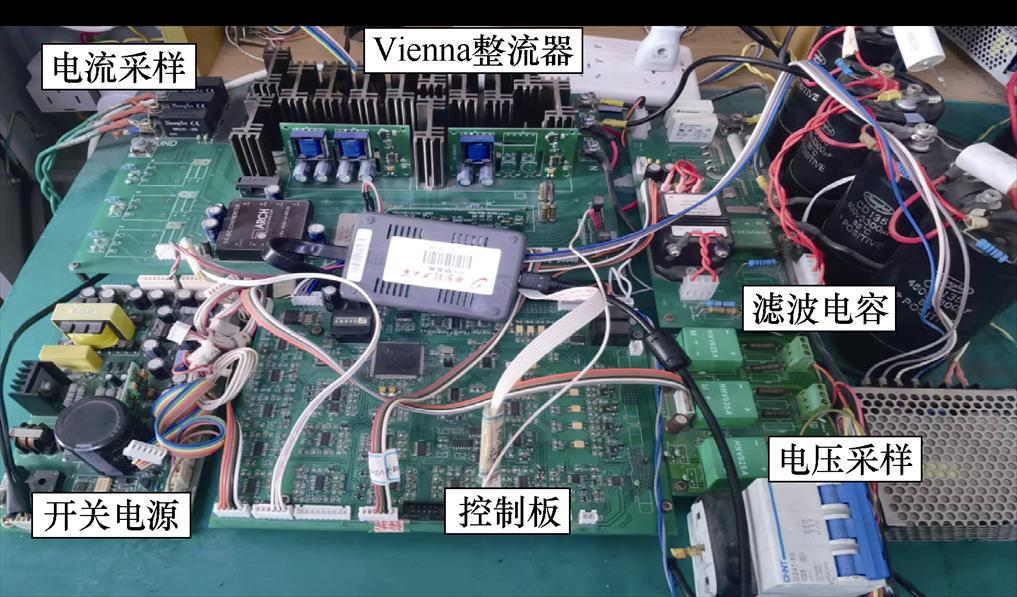
图9 实验平台
Fig.9 Test platform
图10给出了六开关型Vienna整流器降载运行时的静态输出波形。根据图10实验结果,不同控制方式下均能满足对并网电流THD的并网要求,然而,文中所提LADRC-ETMPC策略侧重于在保持并网电流输出性能的同时可以有效降低开关动作次数,从而减小系统开关损耗并进一步提升开关频率。此外,在抑制中点电位波动的基础上保证系统性能要求。
为比较两种控制策略在系统计算量方面的性能效果,在控制周期为100 ms的情况下,传统FCS- MPC策略执行时间为41 ms,当采用LADRC- ETMPC时控制算法执行时间为28 ms。由此可见,所提策略有效缩短执行控制算法的时间,与传统FCS-MPC相比能有效降低系统计算量。
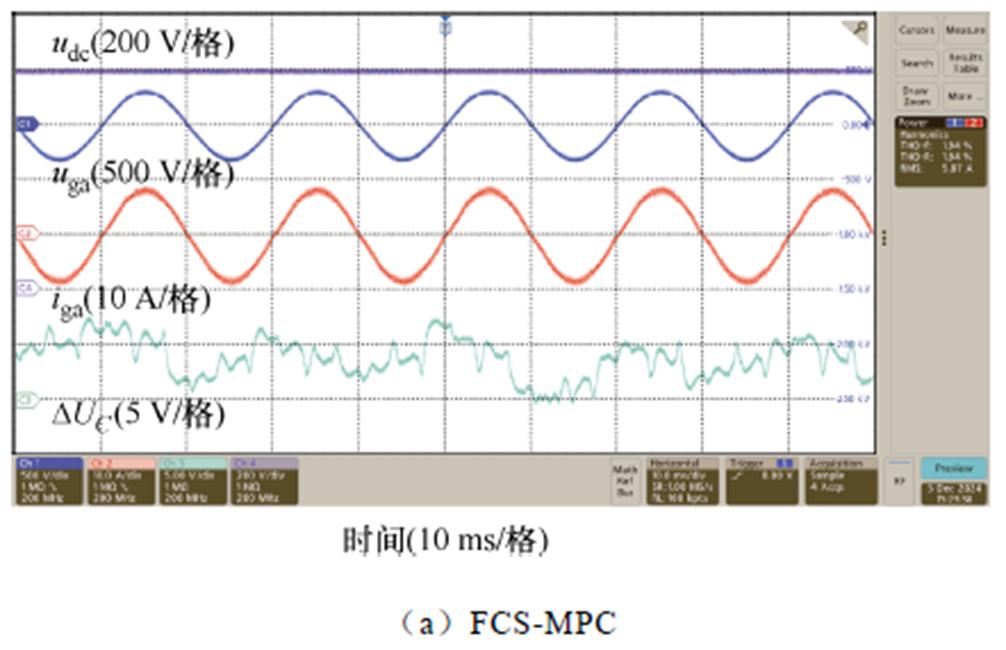
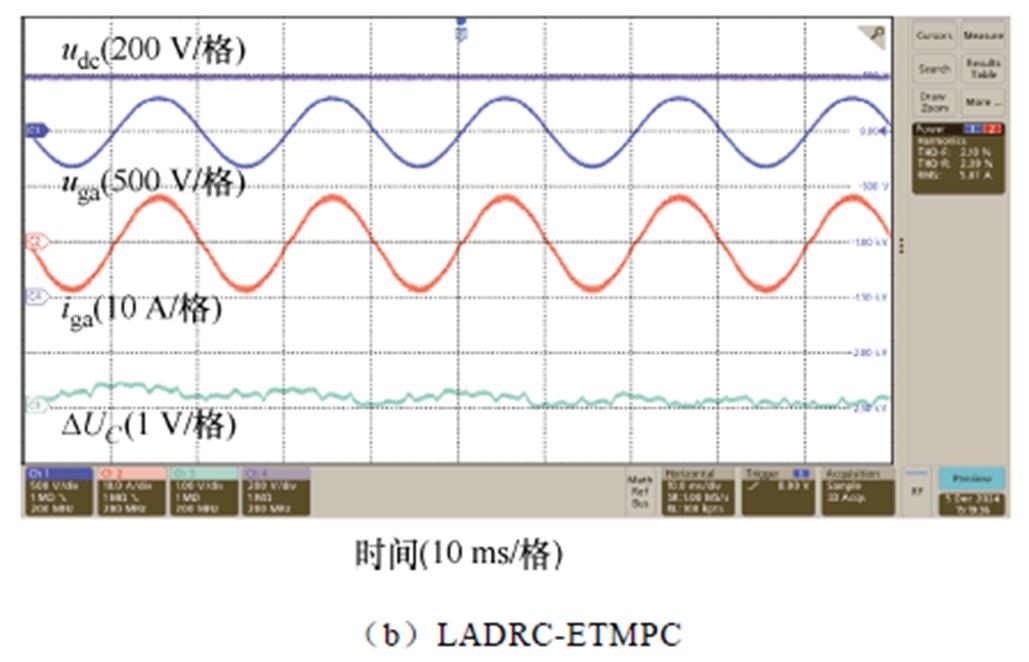
图10 半载工况下静态输出波形
Fig.10 Steady state output waveforms under half load
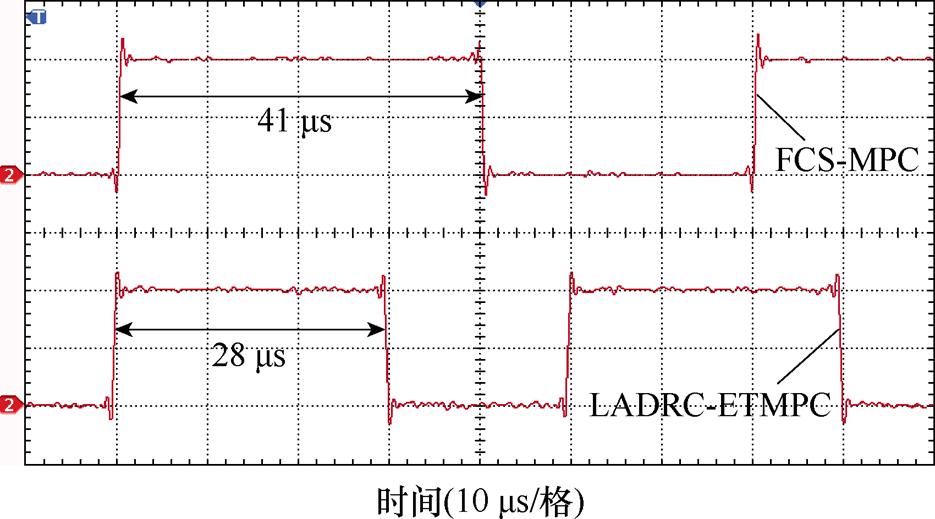
图11 控制算法执行时间
Fig.11 The execution time of control algorithm
为了进一步说明文中LARDC-ETMPC在减小等效开关频率的效果,图12给出了A相左侧开关管Sa1的脉冲响应波形。可以看出,在采用FCS-MPC时,可以看出传统的FCS-MPC在每个控制周期内执行MPC优化计算,而LADRC-ETMPC策略在一个控制周期内MPC算法的触发次数和切换次数明显少于FCS-MPC策略,结果表明LADRC-ETMPC策略大大减少了不必要的寻优计算,避免了冗余开关动作。
当系统由满载切换至1/4额定功率,再切换至满载工况,对比采用传统FCS-MPC与LADRC-ETMPC时的暂态输出响应如图13所示。可以看到暂态响应时间由45 s减小至10 ms,网侧电流正弦度高,中点电位波动由6.2 V减小为1.1 V。
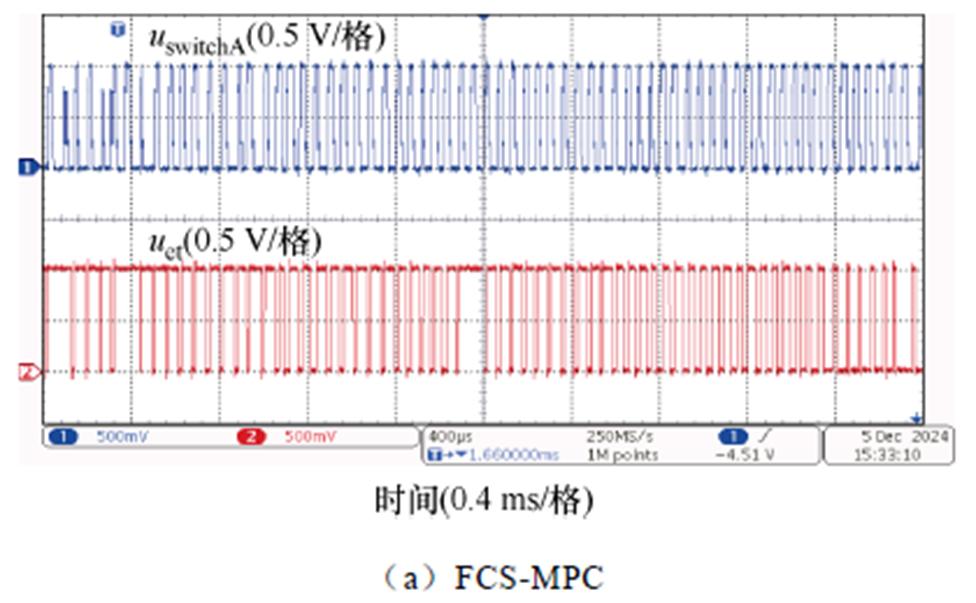
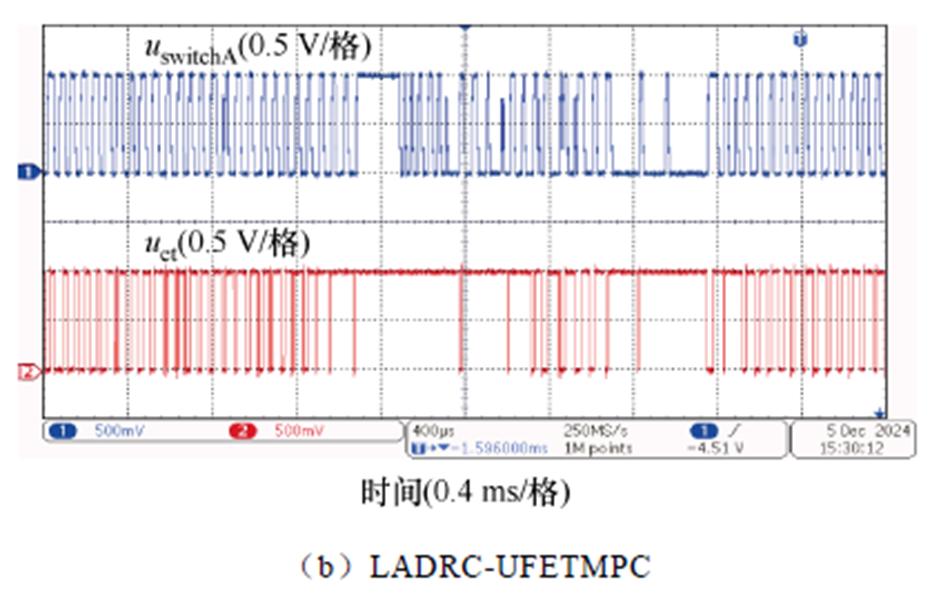
图12 开关脉冲驱动输出响应
Fig.12 The response resultstrigger
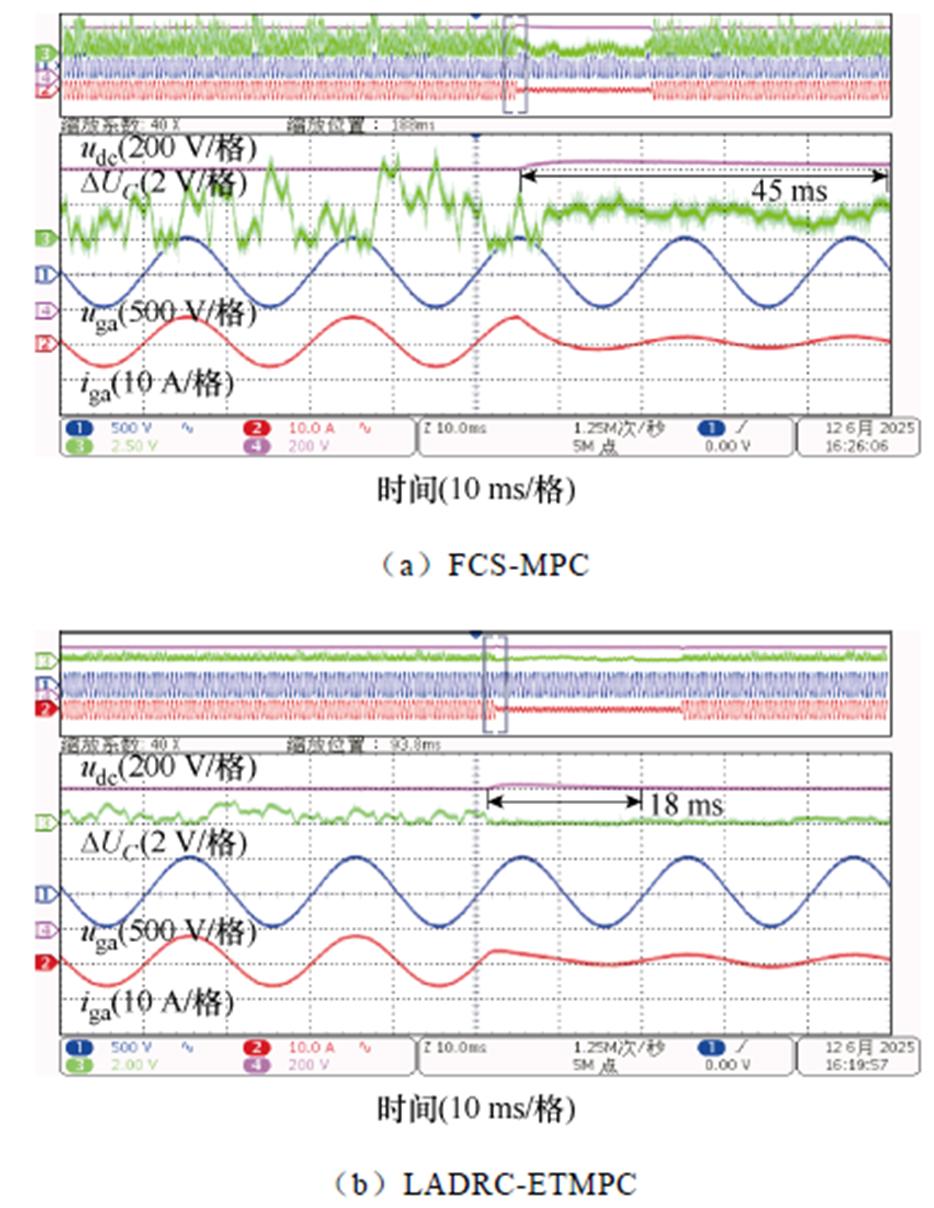
图13 暂态响应输出波形
Fig.13 Dynamic response output waveforms
图14为当直流侧电压给定发生阶跃变化时的输出响应,直流电压给定由700 V切换到850 V,再切换至1 000 V。根据图14对比可以看到,当直流侧电压给定信号宽范围突变时,采用文中所提出的控制方式可以有效降低系统电压及网侧电压暂态响应超调,直流侧电容电压波动小。采用传统的FCS-MPC时网侧电流瞬时畸变明显,且中点电位波动显著增大。
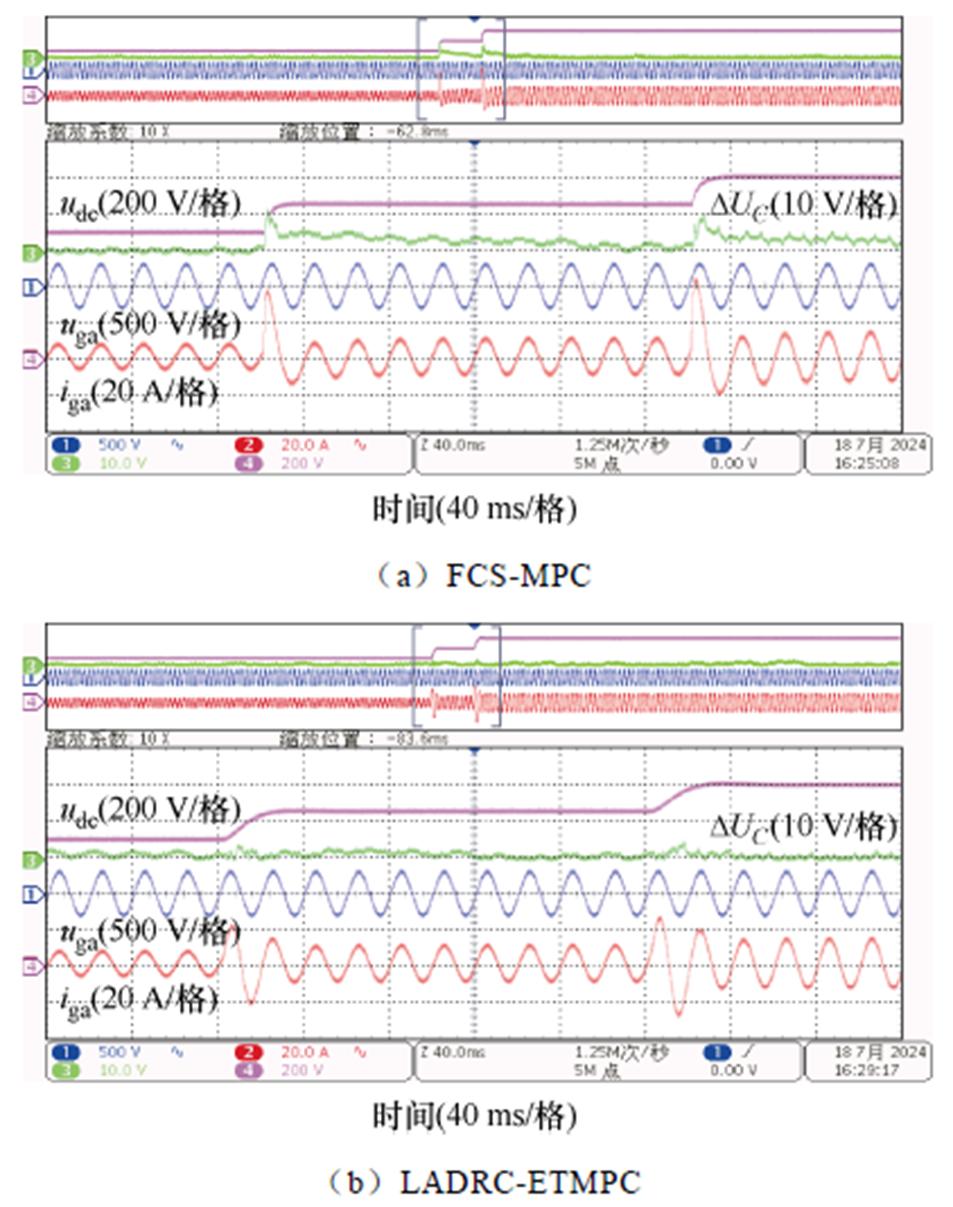
图14 直流电压给定突变时的暂态输出波形
Fig.14 Transient output waveforms when the DC voltage reference changes abruptly
以三电平六开关型Vienna整流拓扑为切入点,本文围绕传统FCS-MPC冗余迭代寻优繁琐以及PI控制器动态响应过程直流输出超调等问题进行了深入研究,为减小开关损耗、改善网侧电流性能的同时提升系统鲁棒性,通过构建基于系统实时状态反馈的触发条件,利用事件驱动机制减少系统运算复杂度并减小等效开关频率;深入剖析一阶LADRC结构,揭示其与PI控制器结构之间的参数关联性,通过LADRC获取跟踪参考电流以抑制直流输出电压超调,提出一种基于LADRC的Vienna整流器事件驱动型预测控制策略,研究结果表明:
1)与传统的FCS-MPC相比,LADRC-MPC在保证网侧并网输出性能的同时可显著降低等效开关频率,有效降低了冗余计算并减小了开关损耗。
2)采用文中LADRC-MPC可有效平衡中点电位波动,相较于FCS-MPC中点电位波动降低了82.26%,有效抑制了直流侧暂态响应超调与中点电位波动。
参考文献
[1] 郭强, 徐文希, 李海啸, 等. 不平衡电网下Vienna整流器混合控制策略[J]. 高电压技术, 2025, 51(3): 1284-1294.
Guo Qiang, Xu Wenxi, Li Haixiao, et al. Hybrid control strategy of Vienna rectifier under unbalanced power grid[J]. High Voltage Engineering, 2025, 51(3): 1284-1294.
[2] 张志坚, 张国强, 李斌兴, 等. 基于钳位方式切换的Vienna整流器载波断续脉冲宽度调制策略[J]. 中国电机工程学报, 2024, 44(8): 3202-3213.
Zhang Zhijian, Zhang Guoqiang, Li Binxing, et al. Carrier-based discontinuous PWM strategy based on clamp mode switching for Vienna rectifiers[J]. Proceedings of the CSEE, 2024, 44(8): 3202-3213.
[3] 王聪, 刘霞, 程红, 等. 一种三相线电压级联单位功率因数整流器负载不均衡特性分析及电压均衡控制策略[J]. 电工技术学报, 2024, 39(2): 525-540.
Wang Cong, Liu Xia, Cheng Hong, et al. Static characteristics and output voltage balance control of a novel line-voltage cascaded three-phase unity power factor rectifier under unbalanced load[J]. Transactions of China Electrotechnical Society, 2024, 39(2): 525- 540.
[4] 岳益民, 刘芳, 姜卫东, 等. 电网电压不平衡条件下Vienna整流器控制及电流过零畸变抑制方法[J]. 中国电机工程学报, 2023, 43(16): 6395-6407.
Yue Yimin, Liu Fang, Jiang Weidong, et al. The control and current over-zero distortion suppression method for Vienna rectifier under unbalanced grid voltage condition[J]. Proceedings of the CSEE, 2023, 43(16): 6395-6407.
[5] 邹宇航, 张犁, 赵瑞, 等. 三相Vienna整流器的不连续空间矢量脉宽调制及电压谐波分析方法[J]. 中国电机工程学报, 2020, 40(24): 8123-8130, 8249.
Zou Yuhang, Zhang Li, Zhao Rui, et al. Discon- tinuous pulse width modulation and voltage harmonic analysis method for three-phase Vienna-type recti- fiers[J]. Proceedings of the CSEE, 2020, 40(24): 8123-8130, 8249.
[6] 徐子梁,任小永,吴玲燕,等. 航空Vienna整流器缺相控制方法[J].电工技术学报, 2023, 38(20): 5560-5571.
Xu Ziliang, Ren Xiaoyong, Wu Lingyan, et al. A lack phase control strategy for aircraft Vienna rectifier[J]. Transactions of China Electrotechnical Society, 2023, 38(20): 5560-5571.
[7] Park J H, Lee J S, Lee K (B). Sinusoidal harmonic voltage injection PWM method for Vienna rectifier with an LCL filter[J]. IEEE Transactions on Power Electronics, 2021, 36(3): 2875-2888.
[8] 张哲, 邢岩, 张犁, 等. 三相Vienna整流器的载波断续脉宽调制优化算法[J]. 中国电机工程学报, 2022, 42(22): 8288-8297.
Zhang Zhe, Xing Yan, Zhang Li, et al. Optimized carrier-based discontinuous PWM schemes for three-phase Vienna-type rectifiers[J]. Proceedings of the CSEE, 2022, 42(22): 8288-8297.
[9] 罗韦华, 张宇超, 姜佳彦, 等. 虑及参数失配的Vienna整流器多目标快速排序模型预测控制[J]. 太阳能学报, 2025, 46(2): 209-217.
Luo Weihua, Zhang Yuchao, Jiang Jiayan, et al. Multi-objective fast ranking model predictive control considering parameter mismatches of Vienna recti- fier[J]. Acta Energiae Solaris Sinica, 2025, 46(2): 209-217.
[10] 党超亮, 蒋泽豪, 王艺华, 等. 基于事件触发的Vienna整流器模型预测控制[J]. 太阳能学报, 2025, 46(2): 272-281.
Dang Chaoliang, Jiang Zehao, Wang Yihua, et al. Model predictive control of Vienna rectifier based on event-triggered[J]. Acta Energiae Solaris Sinica, 2025, 46(2): 272-281.
[11] 汪凤翔, 杨奥, 于新红, 等. 基于自适应超螺旋滑模观测器的三相Vienna整流器无模型预测电流控制[J]. 电工技术学报, 2024, 39(6): 1859-1870.
Wang Fengxiang, Yang Ao, Yu Xinhong, et al. Model-free predictive current control for three-phase Vienna rectifier based on adaptive super-twisting sliding mode observer[J]. Transactions of China Electrotechnical Society, 2024, 39(6): 1859-1870.
[12] 肖蕙蕙, 胡前云, 郭强, 等. 不平衡电网下Vienna整流器无网压传感器预测功率控制[J]. 电气工程学报, 2025, 20(1): 131-139.
Xiao Huihui, Hu Qianyun, Guo Qiang, et al. Predictive power control of Vienna rectifier without grid voltage sensors in unbalanced grid[J]. Journal of Electrical Engineering, 2025, 20(1): 131-139.
[13] Kawai H, Zhang Zhenbin, Kennel R, et al. Direct speed control based on finite control set model predictive control with voltage smoother[J]. IEEE Transactions on Industrial Electronics, 2022, 70(3): 2363-2372.
[14] 党超亮, 王飞, 穆晓宇, 等. 引入电感参数辨识的Vienna整流器双矢量预测恒频控制[J]. 中国电机工程学报, 2022, 42(增刊1): 246-255.
Dang Chaoliang, Wang Fei, Mu Xiaoyu, et al. Double vector predictive constant frequency control of Vienna rectifier with inductance parameter identi- fication[J]. Proceedings of the CSEE, 2022, 42(S1): 246-255.
[15] 田亚卓, 刘辰伟, 张勇军, 等. 一种改进的T型三电平逆变器序列模型预测控制策略[J]. 电工技术学报, 2024, 39(24): 7821-7832.
Tian Yazhuo, Liu Chenwei, Zhang Yongjun, et al. an improved sequential model predictive control strategy for T-type three-level inverter system[J]. Transactions of China Electrotechnical Society, 2024, 39(24): 7821-7832.
[16] Zhang Xu, Tan Guojun, Xia Tao, et al. Optimized switching finite control set model predictive control of NPC single-phase three-level rectifiers[J]. IEEE Transactions on Power Electronics, 2020, 35(10): 10097-10108.
[17] Liu Xing, Qiu Lin, Fang Youtong, et al. Finite- level-state model predictive control for sensorless three-phase four-arm modular multilevel converter[J]. IEEE Transactions on Power Electronics, 2019, 35(5): 4462-4466.
[18] 郭磊磊, 王朋帅, 李琰琰, 等. 不同代价函数下永磁同步电机模型预测控制参数失配可视化分析[J]. 电工技术学报, 2023, 38(4): 903-914.
Guo Leilei, Wang Pengshuai, Li Yanyan, et al. Visual analysis of parameters mismatch in model predictive control for permanent magnet synchronous motor under different cost functions[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 903-914.
[19] 陈隆, 周扬忠. 一种基于虚拟矢量的T型三电平并网逆变器改进型模型预测控制策略[J]. 电气技术, 2022, 23(11): 37-43.
Chen Long, Zhou Yangzhong. An improved model predictive control based on virtual space vector for T-type three-level grid-connected inverters[J]. Elec- trical Engineering, 2022, 23(11): 37-43.
[20] 党超亮, 王飞, 刘丁, 等. 基于优选矢量合成的Vienna整流器滑模预测控制[J]. 中国电机工程学报, 2022, 42(23): 8699-8708.
Dang Chaoliang, Wang Fei, Liu Ding, et al. Sliding mode predictive control of Vienna rectifier based on optimal vector synthesis[J]. Proceedings of the CSEE, 2022, 42(23): 8699-8708.
[21] Duran M J, Prieto J, Barrero F, et al. Predictive current control of dual three-phase drives using restrained search techniques[J]. IEEE Transactions on Industrial Electronics, 2011, 58(8): 3253-3263.
[22] Lin Chengkai, Yu J T, Lai Y S, et al. Simplified model-free predictive current control for interior permanent magnet synchronous motors[J]. Electronics Letters, 2016, 52(1): 49-50.
[23] Wang Benfei, Huang Jingjing, Wen Changyun, et al. Event-triggered model predictive control for power converters[J]. IEEE Transactions on Industrial Elec- tronics, 2020, 68(1): 715-720.
[24] 高崇禧, 颜景斌, 李学东, 等. 脉冲负载下PWM整流器自适应线性自抗扰控制[J]. 电机与控制学报, 2023, 27(1): 55-64.
Gao Chongxi, Yan Jingbin, Li Xuedong, et al. Adaptive linear active disturbance rejection control method of PWM rectifier under pulse load[J]. Electric Machines and Control, 2023, 27(1): 55-64.
[25] 段茜月, 陈燕东, 徐元璨, 等. 一种改进线性扩张状态观测器的自抗扰控制宽频带振荡抑制方法研究[J]. 电力系统保护与控制, 2023, 51(13): 12-24.
Duan Xiyue, Chen Yandong, Xu Yuancan, et al. A wideband oscillation suppression method for active disturbance rejection control with an enhanced linear expansion state observer[J]. Power System Protection and Control, 2023, 51(13): 12-24.
[26] 周杰, 皇金锋, 黄红杰. 光储一体化变流器改进滑模自抗扰控制[J]. 电工技术学报, 2025, 40(2): 504-516, 530.
Hou Jie, Huang Jingfeng, Huang Hongjie, et al. Improved sliding mode active disturbance rejection control strategy for PV-storage integrated con- verter[J]. Transactions of China Electrotechnical Society, 2025, 40(2): 504-516, 530.
[27] Wang Xiaopeng, Zhao Jun, Wang Bohui, et al. An improved sequential model predictive control strategy for T-type three-level inverter system[J]. Journal of Southeast University (English Edition), 2022, 38(3): 227-234.
Abstract Finite control set-model predictive control (FCS-MPC) enables multi-objective optimization in complex nonlinear constrained systems, and has been extensively applied to the control of Vienna rectifiers. FCS-MPC is based on the discretized model of the three-level Vienna system and comprehensively evaluates all possible voltage vectors in each control cycle, selecting the optimal vector that minimizes the cost function. This strategy achieves multi-objective coordinated optimization and enhances control precision and flexibility. However, the traditional FCS-MPC is burdened by irregular switching states, redundant switch vector switching, and complex multi-objective optimization, increasing switching losses and computational complexity. To improve convergence speed and reduce redundant optimization, this paper proposes a dual-closed-loop composite control strategy that combines event-triggered model predictive control (ET-MPC) and linear active disturbance rejection control (LADRC) in the external loop for the three-level Vienna rectifier.
Firstly, by deriving analytical equations for the state space of the Vienna system and the event-trigger conditions, the influence of the trigger threshold on the system's convergence speed and static performance is clarified. The trigger conditions for tracking the current error threshold are set based on the system's real-time state feedback to reduce arithmetic complexity and the number of switching actions.
Secondly, through a thorough examination of the equivalence between LADRC and PI control, the parameter correlation law is analyzed, and the parameter equivalence expressions are derived. The LADRC is used to obtain the current signal rather than a traditional PI controller, thereby suppressing DC output voltage overshoot during dynamic response and improving the system's dynamic performance and robustness.
Finally, a Vienna circuit simulation model and an experimental platform are constructed. Then, the multi-dimensional comparison analysis with the traditional FCS-MPC is conducted. The following conclusions can be drawn.
(1) The LADRC-ETMPC utilizes an event-triggered mechanism to reduce the computational burden on the system. As the trigger threshold increases, the number of switching actions decreases. The equivalent switching frequency is reduced by 42% while maintaining grid-connected current output performance, thereby reducing switching losses.
(2) The LADRC-ETMPC utilizes LADRC to replace PI control and significantly reduces DC output voltage overshoot during dynamics. The overshoot is reduced by 52%.
(3) The proposed LADRC-MPC method can effectively balance the fluctuation of neutral point potential. Compared with the FCS-MPC, the fluctuation in neutral-point potential on the DC side is reduced by 71.8%.
Keywords:Vienna rectifier, model predictive control, event-triggered, linear active disturbance rejection
中图分类号:TM461
DOI: 10.19595/j.cnki.1000-6753.tces.250345
陕西省教育厅科学研究技术服务地方专项-产业化培育项目(24JC069)、国家自然科学基金项目(62573341)和现代电力系统仿真控制与绿色电能新技术教育部重点实验室项目(MPSS2024-03)资助。
收稿日期 2025-03-04
改稿日期 2025-06-04
党超亮 男,1988年生,博士后,讲师,研究方向新能源与微电网、高效电能变换智能控制及电动汽车充放电技术等。
E-mail: dangclkk@163.com(通信作者)
蒋泽豪 男,2000年生,硕士研究生,研究方向为新能源发电与智能微电网、高效电能变换预测控制与智能控制等。
E-mail: jiangzhou0813@163.com
(编辑 郭丽军)