图1 VSG多机并联系统等效电路
Fig.1 Equivalent circuit of VSG multi-machine parallel system
摘要 大规模新能源通过变流器接入电网会导致系统惯量降低,频率稳定性面临严峻挑战。采用虚拟同步机(VSG)技术可以使新能源变流器具备同步机组特征,从而改善系统低惯量与低阻尼特性。然而,高比例虚拟同步机的接入将会加剧系统的有功功率振荡与频率偏差,这是目前VSG馈入系统的主要问题。为此,该文提出一种计及阻尼惯量耦合振荡约束的VSG动态控制策略。首先,建立多机并联系统功率传输方程频域表达模型,推导并分析多机并联系统阻尼惯量耦合振荡特性,量化多机参数耦合下的振荡约束条件;其次,综合联立单机动态调整特性与多机耦合约束,确立各机组虚拟惯量、阻尼系数的动态约束区间,并设计基于多层感知器(MLP)神经网络的动态控制模型,实现各机组参数的解耦控制;最后,通过算例进行了分析,验证了该文所设计动态控制策略对有功振荡与频率偏差具有良好的抑制效果。
关键词:虚拟同步机 多机系统 阻尼惯量耦合 多层感知器(MLP)神经网络 动态控制
随着“碳达峰、碳中和”目标的稳步推进,能源结构的转型速度日益加快,以风电、光伏为代表的可再生能源并网规模显著扩大[1-2]。而风电、光伏等新能源主要以电力电子器件并网,不具备同步发电机的惯量支撑特性。随着新能源渗透率的不断提高,新型电力系统呈现弱阻尼与低惯量特性,电网对频率波动的抑制能力减弱[3-5]。为此,虚拟同步机(Virtual Synchronous Generator, VSG)技术应运而生[6],VSG通过模拟传统同步发电机的阻尼与惯量特性,为电网提供必要的惯量能力[7-8]。然而,VSG在受到扰动时存在输出功率振荡的问题,可能造成电力电子变流器的损坏,严重时将对电网的稳定运行造成危害[9-10]。因此,迫切需要对VSG的控制策略进行研究,以抑制输出功率和频率的振荡问题。
为解决上述问题,国内外学者对虚拟同步机参数控制进行了一系列研究。如文献[11]基于Bang- Bang控制原理,通过频率阈值调整虚拟惯量以抑制频率波动,但存在控制参数阶跃变化导致的失稳风险。文献[12-13]对Bang-Bang算法进行改进,将判断阈值离散化,降低了调整参数的突变程度。但上述研究仅涉及虚拟惯量的动态调整,并未涉及同样至关重要的阻尼系数,为此,文献[14]提出动态调整虚拟惯量与阻尼系数的自适应控制方法,定性地根据惯量动态调整阻尼系数取值,但准确度不高。为提高准确度,文献[15]提出一种交替控制策略,根据角频率微分选择性地调整阻尼系数与虚拟惯量以抑制频率振荡。同时,文献[16-17]对阻尼系数与虚拟惯量定量分析,提出一种协调优化方法,在调节时保有较高的准确度。上述研究仅对单一机组参数进行协调优化,难以应用到多机系统的协调控制。
为实现对多机参数的协调优化,需要考虑多机之间的交互特性。文献[18]分析惯量调节过程中各机组动态频率变化规律,研究多机虚拟惯量与频率响应特性的定量关系,但缺乏对阻尼系数的考量。文献[19]针对双机并联系统建立了小信号模型,提出了一种阻尼、惯量自调节优化方法,但该策略应用在多机系统中会出现参数阶跃导致调节时间激增的问题。为降低调节过程中参数阶跃对动态性能的影响,文献[20-21]在考虑虚拟惯量、阻尼系数的动态调节时,增加了对下垂系数、虚拟阻抗等参数的动态调整,抑制了参数的突变,进而改善了调整过程中的动态特性。但以上方法额外增加的优化变量降低了多机参数调整的准确度,同时采用参数变化量作为判据的自适应调节并未解决虚拟惯量、阻尼系数之间的耦合问题,且未能反映调节参数与频率变化程度间的映射关系。
在研究各参数变量交互关系上,文献[22]指出VSG虚拟惯量、阻尼系数与频率的映射关系是非线性的。在处理非线性映射关系与参数耦合问题上,神经网络以评价函数为指标,采用非线性逼近的方式,能有效地解决各参数间的耦合问题。文献[23]提出一种使用径向基函数(Radial Basis Function, RBF)神经网络动态控制虚拟惯量的控制策略,但限制了阻尼系数的动态调整范围,调节灵活性不足。文献[24]将虚拟惯量与分数阶相结合,调节虚拟惯量阶数以抑制波动,而阶数的选择需要依靠人工调整,自适应泛化性能不足。在此基础上,文献[25]提出一种考虑虚拟惯量、阻尼系数与动态阻尼补偿量的自适应控制策略,提高了系统阻尼随频率变化动态调整的准确度。
上述研究均做了很有意义的工作,解决了单一机组虚拟惯量与阻尼系数的耦合问题,但仍缺少考虑多机机组间参数耦合特性的研究。如何实现多机系统各参数间的动态解耦控制,以满足各机组动态响应调节需求亟须进一步深入的研究。为此,本文提出一种考虑阻尼惯量耦合振荡约束的虚拟同步机并联系统动态控制策略。首先,分析多机并联系统阻尼惯量耦合振荡关系,基于此提出考虑多机耦合特性的振荡约束;其次,综合单机动态特性与多机振荡约束,将各机组虚拟惯量、阻尼系数约束区间化,构建多层感知器(Multilayer Perceptron, MLP)动态控制模型以实现各机组参数动态自适应调节;最后,通过算例分析,对所提多机耦合振荡特性理论分析的正确性与动态控制策略的有效性进行验证。
为探究多机并联系统下虚拟惯量与阻尼系数参数对系统的影响,需对并联系统的功率响应特性进行研究,进而对参数动态区间范围予以约束。
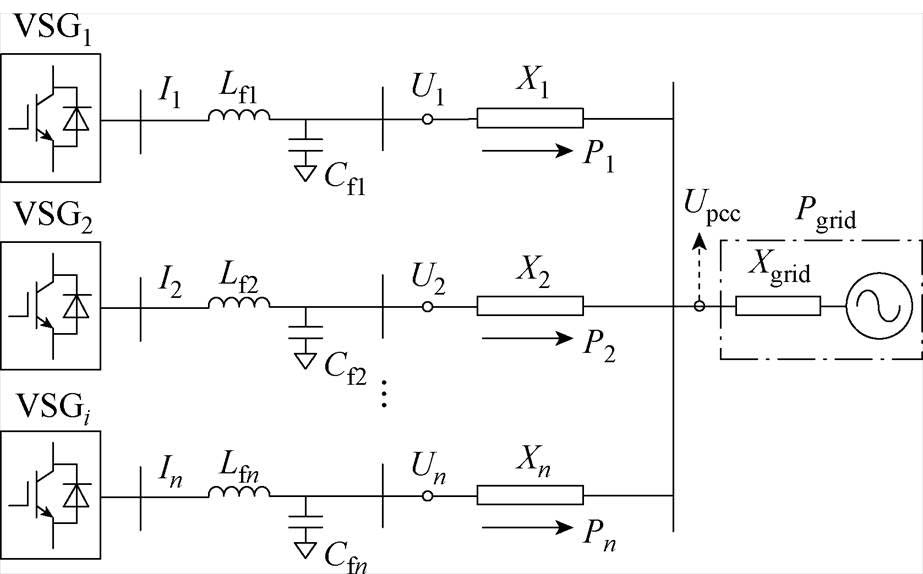
图1构建了VSG多机并联系统等效电路,图中,Lfi(i=1,2,…, n)为第i台VSG滤波电感;Cfi为第i台VSG滤波电容;Ii与Ui分别为第i台VSG输出端口电感电流与电容电压;Xi为第i台VSG并网线路阻抗;Pi为第i台VSG并网功率;Upcc为并网点电压;Pgrid为并网总功率;Xgrid为电网等效阻抗。
图1 VSG多机并联系统等效电路
Fig.1 Equivalent circuit of VSG multi-machine parallel system
VSG的控制回路主要包括有功功率控制环与无功功率控制环,分别包括摆动方程、虚拟调速器以及虚拟励磁机[26]。以单机系统为例,VSG的功率控制回路如图2所示。
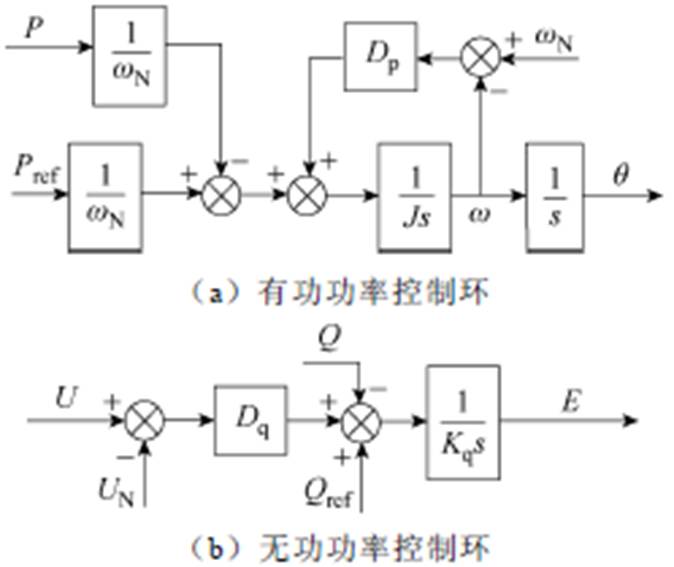
图2 VSG功率控制环示意图
Fig.2 Schematic diagram of the VSG power control loop
图2中,P、Q分别为VSG输出的有功功率与无功功率;Pref、Qref为VSG额定有功功率与无功功率;U、UN分别为滤波器电容电压与额定电压;E为同步发电机虚拟电动势;w、wN分别为虚拟角频率与额定角频率;J、Dp分别为虚拟惯量与阻尼系数;Kq、Dq分别为无功调压系数与电压比例系数。
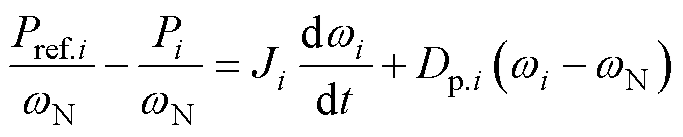
VSG各机组的数学模型为
 (1)
(1)
 (2)
(2)
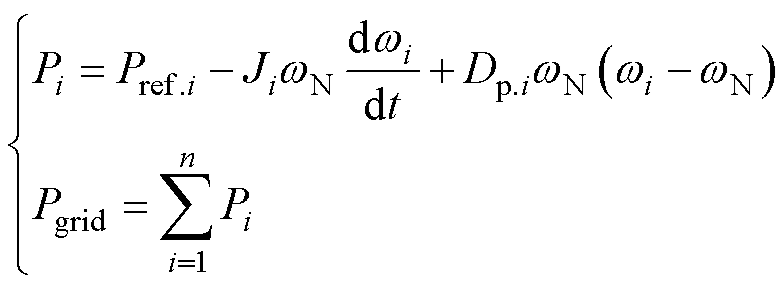
考虑并网功率与每台VSG输出功率的相关性,将式(1)改写为
 (3)
(3)
式中,n为并联VSG数量。
同时,根据有功功率传输方程及功角特性可得
 (4)
(4)
式中,di为第i台VSG功角;wpcc为公共并网点角频率;ki为第i台VSG功率相位转换系数。
结合式(3),得到多机并联系统有功功率的频域表达式为
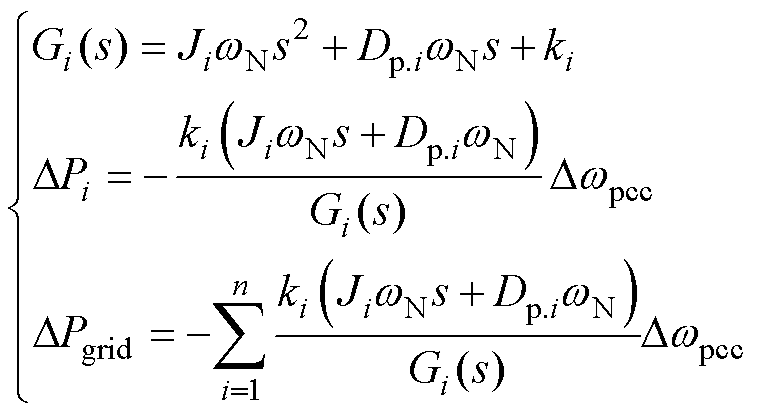 (5)
(5)
结合式(4)和式(5),可得每台VSG传输功率变化量与并网总功率变化量的频域表达式为
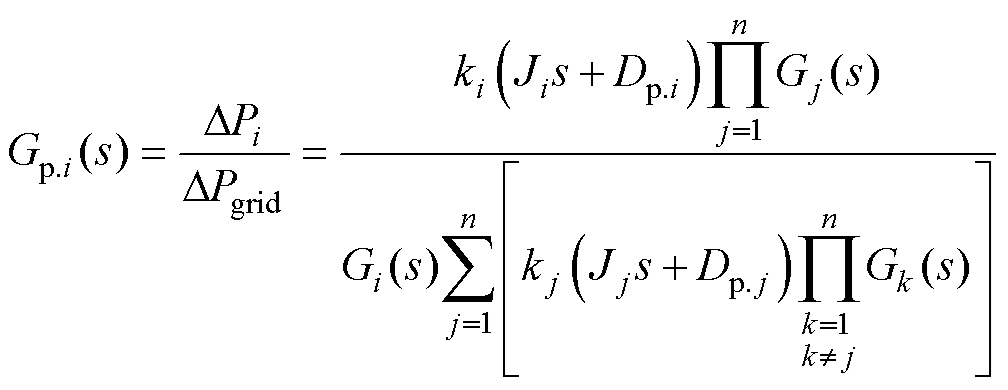 (6)
(6)
式(6)反映了系统总功率变化时第i台机组的输出响应特性。基于此,进一步分析各参数对功率响应特性的影响,并以此为依据确立VSG动态参数调整约束条件。
由式(6)可知,传递函数的稳定性与极点分布特性有关。Gp.i(s)的极点包含由自身特性Gi(s)决定的零点与多机耦合零点。在单机系统中,极点的分布仅由Gi(s)决定。在考虑多机并联系统下参数对振荡特性的影响时,为便于分析,同时不失一般性,对式(6)进行改写(以三机系统为例),将分母展开,得到输出功率传递函数表达式为
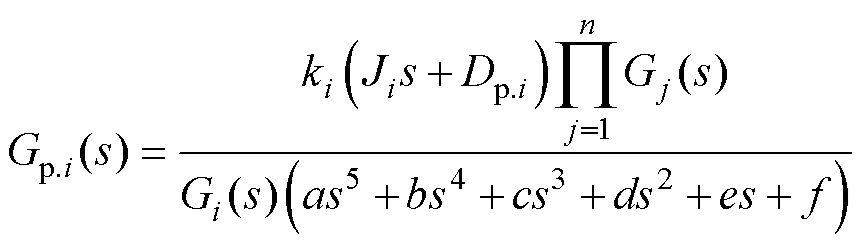 (7)
(7)
式中,a、b、c、d、e、f为三机极点耦合部分的频域多项式系数,a~f表达式分别为
 (8)
(8)
每台机组的极点一部分由自身参数决定;另一部分由三机组惯量阻尼耦合共同决定。由于系统传递函数的极点为一个负极点与若干对共轭极点,在系统受到阶跃激励时,功率将出现振荡,系统的衰减速度主要受到极点实部大小的影响,即
 (9)
(9)
式中,pi为第i台VSG负极点;li.j、wi.j、ji.j分别为第i台机组第j对共轭极点实部、虚部与相位;Ai.1、Ai.j分别为对应极点振荡响应幅值。
为对多机耦合虚拟惯量与阻尼系数进行约束,需进一步研究以量化极点变化特性与各参数的动态变化特性规律。以三机VSG并联系统进行验证,三台VSG额定参数见表1。改变VSG1的虚拟惯量与阻尼系数,观察根轨迹变化规律如图3所示。
在三机耦合作用下,极点动作规律存在一变化区域。在变化区域外,随着VSG1虚拟惯量J的增加,三机组的极点向虚轴靠近,振荡衰减系数均降低,系统稳定性变差;当VSG1阻尼系数增加时,根轨迹远离虚轴,系统趋于稳定。在变化区域内,随着参数的变化,三机极点均趋向某极点附近,最终逐渐收敛。可以看到,参数的变化对机组振荡特性的影响并非是单调的,单独分析虚拟惯量与阻尼系数无法得到量化约束关系,需综合考量二者关系。
表1 三台VSG基本额定参数
Tab.1 Three VSG basic rated parameters
参 数数 值 VSG1VSG2VSG3 额定容量/kW555040 额定频率/Hz505050 虚拟惯量/(kg·m2)0.300.250.20 阻尼系数/[(N·s)/m]18.012.514.0
图3 VSG1、VSG2、VSG3根轨迹变化规律
Fig.3 VSG1、VSG3、VSG3 root locus variation law
高次系统振荡特性由最小衰减系数决定[27],因此需研究极点最大实部的变化特征。本文定义h1、h2、h3分别为三台VSG阻尼惯量比,即
 (10)
(10)
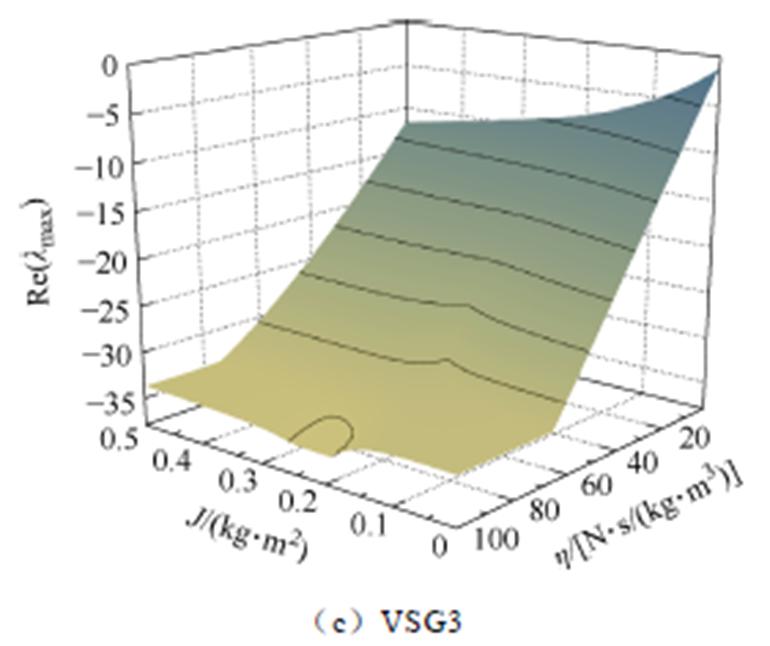
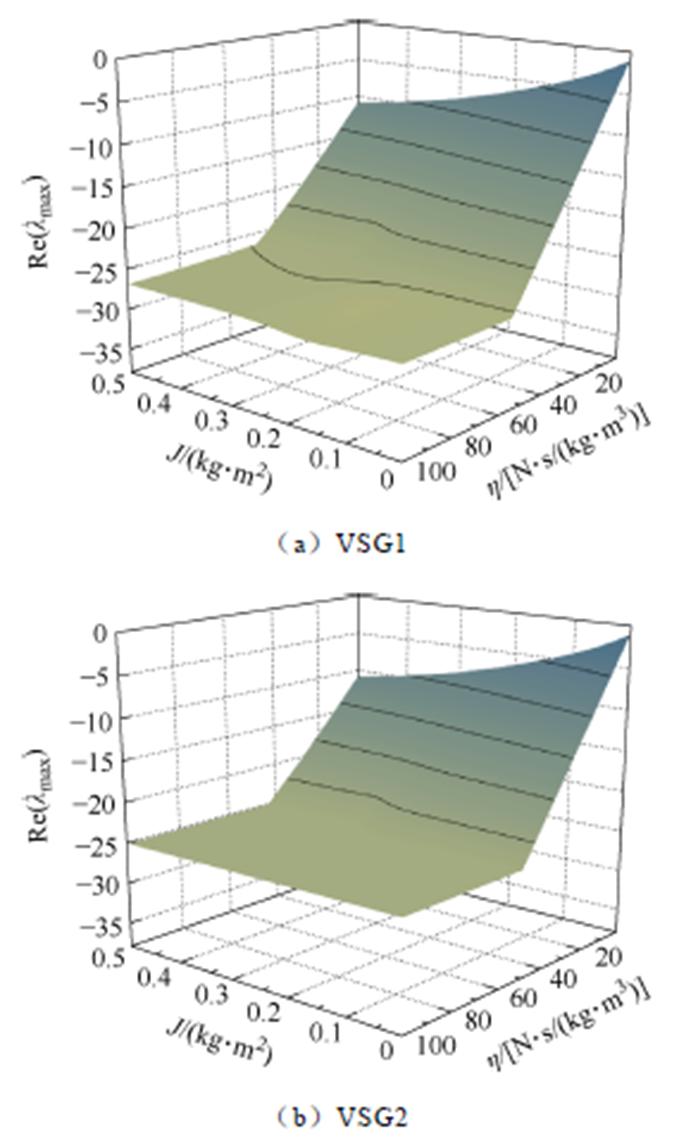
分别以三机系统的阻尼惯量比、虚拟惯量为变量,三机极点最大实部为分析值,绘制系统极点中最大实部的变化规律,如附图3所示。在保持系统阻尼惯量比h不变时,改变不同机组虚拟惯量,对极点最大实部变化影响较小,仅在惯量较大时略有差异。而不同机组在保持虚拟惯量不变时,阻尼惯量比h的改变对系统极点最大实部的影响较大,起主导作用,且最大实部在数值上约等于最小阻尼惯量比的一半。进一步探究阻尼惯量比与最大实部变化规律间的量化关系,定义极点最大实部lmax灵敏度为改变单位阻尼惯量比时最大实部变化量,表示为
 (11)
(11)
式中,Dh为阻尼惯量比变化量;Sl.max为极点最大实部灵敏度。
VSG1、VSG2、VSG3的额定阻尼惯量比分别为60、50、70,其改变时三机灵敏度曲线如图4所示。由图4可知,极点最大实部的灵敏度与阻尼惯量比的相对大小直接相关。当作为变量的阻尼惯量比小于其余两机组时,最大实部随变量增加而减小,且具有较高灵敏度;当变量h越过一机组时,此时具有最小阻尼惯量比机组实部不再变动,其他机组灵敏度有所降低;当h为三机组最大值时,三机组灵敏度均降至0,此时变量h对系统振荡特性无影响。受最小阻尼惯量比的影响,各机组最大实部在越过hmin后变化速率减小,最终数值上约等于最小阻尼惯量比的一半。
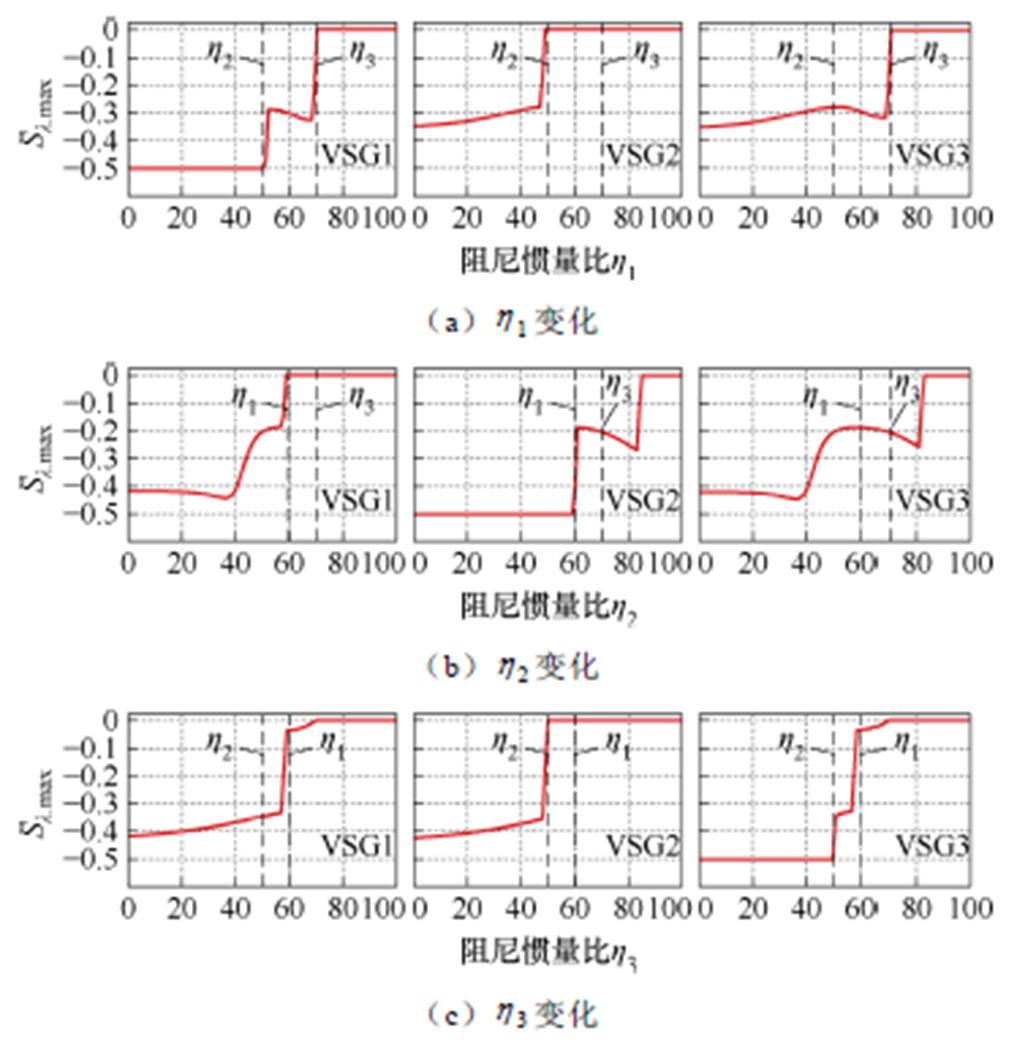
图4 三机阻尼惯量比改变时三机灵敏度曲线
Fig.4 The sensitivity curves of three machines when the damping inertia ratio changes
通过灵敏度分析可知,最大极点实部的变化主要受最小阻尼惯量比变化的影响,结合附录,可得出结论:在多机并联系统中,最小振荡衰减速率由机组最小阻尼惯量比hmin决定,即多机振荡特性主要由响应特性较差机组决定。
在多VSG并联系统中,为保证各机组有功响应的稳定性,首先,需要根据机组容量确定不同机组振荡衰减速率约束要求[16],确定各机组阻尼惯量比约束。其次,根据阻尼惯量比h的灵敏度分析结论,在并联系统中选取具有最高约束机组的h作为并联机组约束条件,以确保每个机组功率响应特性满足振荡约束要求。最后,为VSG动态控制模型的参数整定提供考虑多机阻尼惯量耦合的约束条件。
图5给出了基于神经网络的VSG动态控制模型。为使VSG具有良好的动态特性,需要在一定的区间范围内实时调整不同机组的虚拟惯量与阻尼系数。前馈神经网络没有反馈回路,调节速度快,能够满足VSG实时动态响应的需求。并且VSG的频率特征与虚拟惯量、阻尼系数存在较强耦合关系,采用非线性激活函数的神经网络能够有效处理耦合的非线性问题。
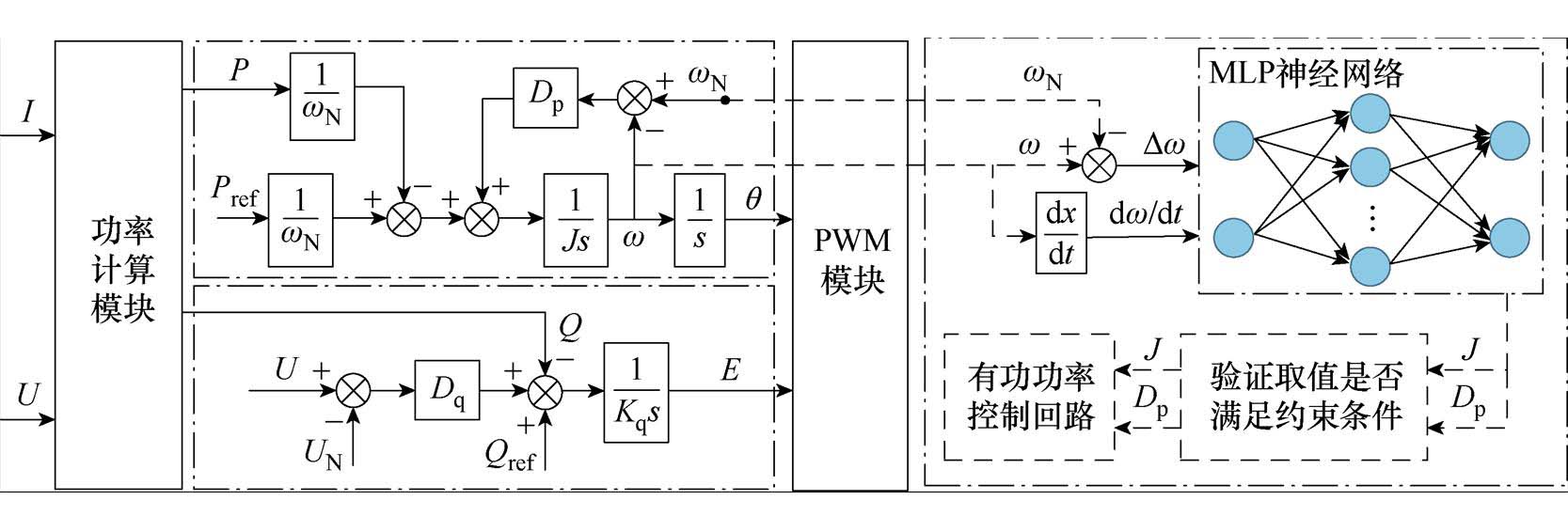
图5 基于神经网络的VSG动态控制模型
Fig.5 Dynamic control model of VSG based on neural network
RBF前馈神经网络采用高斯激活函数,由于不使用离线样本进行训练,向量中心与宽度的选择直接影响自适应控制效果的好坏,存在泛化性能不足的问题[23]。因此,本文构建MLP神经网络作为动态控制模型,避免了激活函数参数的选择对动态调节性能的影响。通过输入参数的变化实时调整输出虚拟惯量与阻尼系数,调整VSG有功动态特性。
将MLP神经网络动态控制模型拓展至多机系统控制中,单独调节不同机组虚拟惯量与阻尼系数参数大小。为确保系统调节过程中的稳定性,不同机组需在合理的约束区间内进行动态调整,因此需要确立虚拟惯量与阻尼系数的约束条件。
在不同机组参数整定情况下,首先考虑单个机组自身的参数约束,在单一机组满足稳定性的前提下,再确定多机系统耦合约束。
根据可再生能源并网标准EN50438,对不同机组阻尼系数的上下区间进行约束。当频率变化1 Hz时,相应的有功功率变化范围为额定功率的40%~100%[27],即
 (12)
(12)
根据VSG1、VSG2与VSG3的额定容量,计算出三台VSG阻尼系数的调节范围,分别为
 (13)
(13)
对于每台VSG而言,有功功率回路的传递函数为二阶系统,可表示为
 (14)
(14)
为兼顾系统的调整速度与稳定裕度,二阶系统相位裕度g通常取30°~80°之间,本文取g>65°[23];另一方面,二阶系统通常设置为欠阻尼,以提高调节速度。综上所述,可以得到单机阻尼比z取值在0.707~1之间[28],表示为
 (15)
(15)
结合二阶系统阻尼比与虚拟惯量、阻尼系数之间的关系,可求得虚拟惯量J与阻尼系数Dp的约束关系为
 (16)
(16)
在确定每台VSG机组各参数的取值范围后,需对并联系统多机耦合参数进行约束。为满足系统调节速度要求,根据并联VSG容量与电网容量大小,本文规定功率传递函数极点最大实部lmax<-25[16, 24]。根据1.2节分析,多机并联系统的振荡特性主要由各机组最低阻尼惯量比h决定,动态过程中三机组中的最小阻尼惯量比需符合要求,即规定h1、h2、h3均大于2|lmax|,满足
 (17)
(17)
综上所述,对单机阻尼系数进行约束后,通过有功响应特性可得虚拟惯量约束区间。结合多机极点的分布特性,确立多机阻尼惯量比约束,求得不同机组的惯量、阻尼参数的动态约束关系。
图6左倾斜线区域分别为VSG1、VSG2、VSG3满足约束条件下虚拟惯量、阻尼系数的约束区间,在满足稳定性、调节速度要求的基础上,将不同虚拟惯量对应的阻尼系数区间化,旨在满足调节时间要求的同时,保证系统调节过程中的稳定性。此时,三个机组虚拟惯量与阻尼系数动态过程中的约束最大值与最小值见表2。
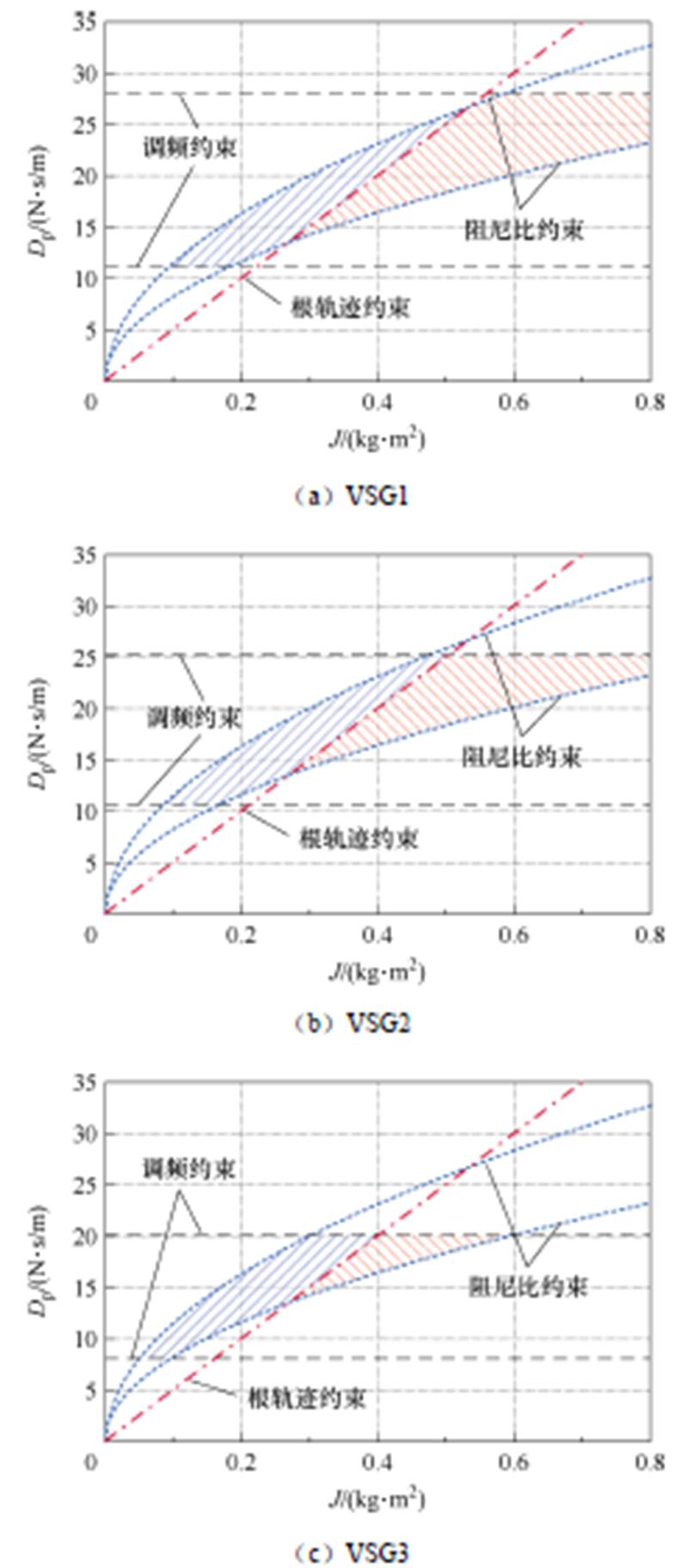
图6 VSG1、VSG2、VSG3惯量阻尼约束区间
Fig.6 VSG1、VSG2、VSG3 inertia and damping constraint range
表2 三台VSG虚拟惯量与阻尼系数上下限
Tab.2 Three VSG virtual inertia and damping coefficient upper and lower limits
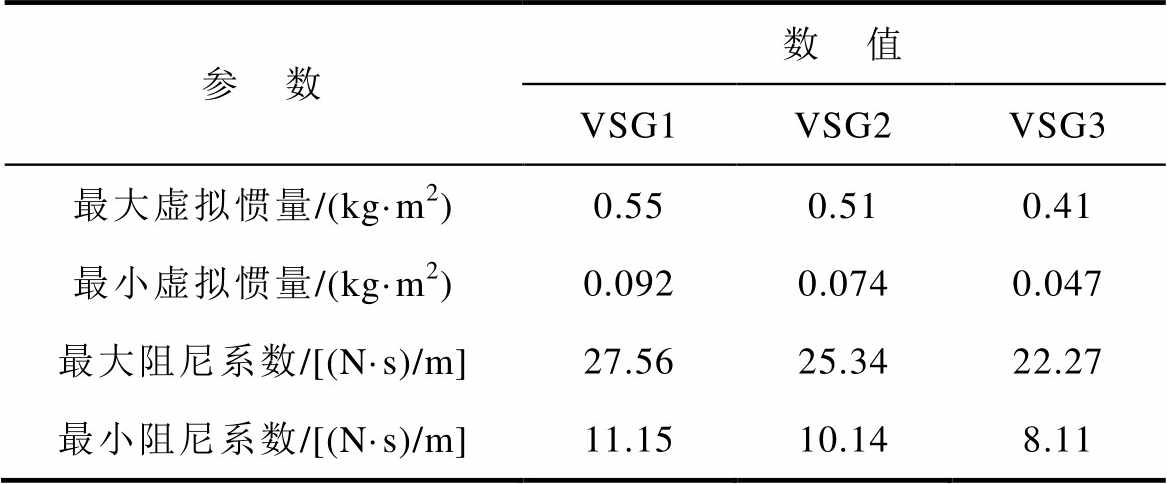
参 数数 值 VSG1VSG2VSG3 最大虚拟惯量/(kg·m2)0.550.510.41 最小虚拟惯量/(kg·m2)0.0920.0740.047 最大阻尼系数/[(N·s)/m]27.5625.3422.27 最小阻尼系数/[(N·s)/m]11.1510.148.11
图7为MLP神经网络的基本模型,MLP分为输入层、隐藏层与输出层;n为输入变量个数,本文输入变量为频率偏差值与频率变化率;m为隐藏层节点数;r为输出变量个数,根据实用经验,选择为输入节点与输出节点数之和,本文取m=4。输出层为各机组虚拟惯量与阻尼系数。
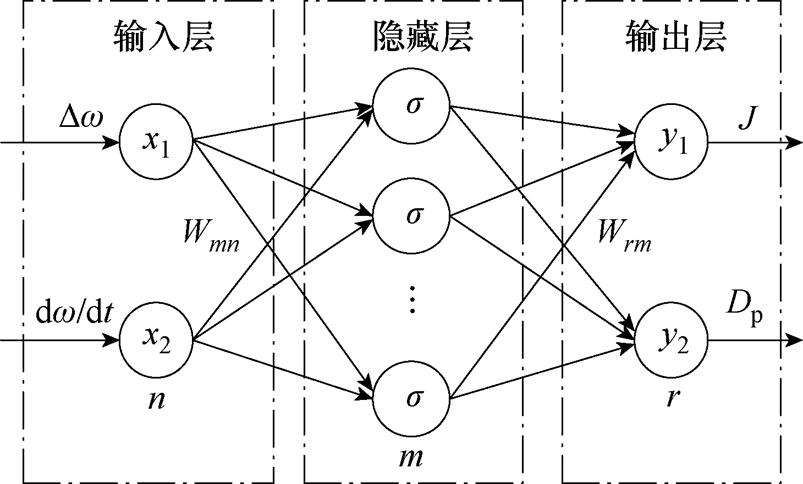
图7 MLP神经网络基本模型
Fig.7 MLP neural network basic model
输入层向量可表示为
 (18)
(18)
式中,x1=Dw;x2=dw/dt。
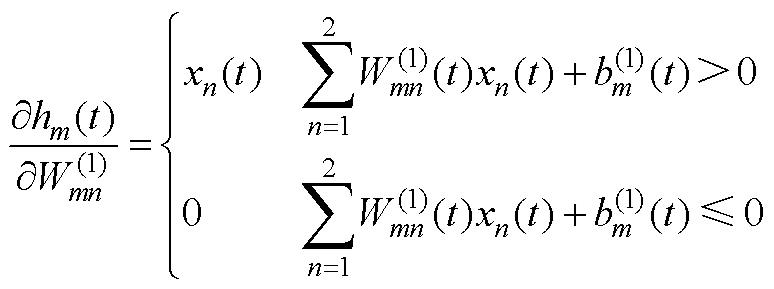
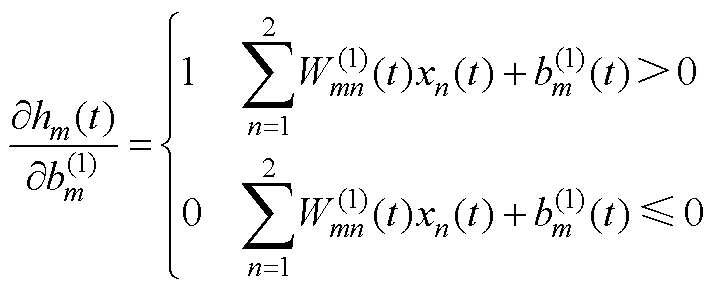
每个隐藏层采用ReLU作为激活函数,计算各隐藏层输出为

 (19)
(19)
式中, 为隐藏层第m个节点对第n个输入特征值的权重;xn为第n个输入特征;
为隐藏层第m个节点对第n个输入特征值的权重;xn为第n个输入特征; 为隐藏层第m个节点的偏差;上标“(1)”表示变量为输入层与隐藏层间的参数。
为隐藏层第m个节点的偏差;上标“(1)”表示变量为输入层与隐藏层间的参数。
隐藏层的输出向量可表示为
 (20)
(20)
MLP输出层的输出采用线性回归,具体表达式为隐藏层输出的加权和,输出向量满足
 (21)
(21)
式中, 为输出层第r个节点对第m个隐藏层节点输出的权重;hm为第m个隐藏层输出;
为输出层第r个节点对第m个隐藏层节点输出的权重;hm为第m个隐藏层输出; 为输出层第r个节点的偏差;上标“(2)”表示变量为隐藏层与输出层间的参数。考虑到输出参数y1、y2的实际物理意义,输出层激活函数采用
为输出层第r个节点的偏差;上标“(2)”表示变量为隐藏层与输出层间的参数。考虑到输出参数y1、y2的实际物理意义,输出层激活函数采用
 (22)
(22)
式中,Yr.max为第r个输出函数的最大值,这里为每个VSG输出虚拟惯量与阻尼系数的最大值。
为动态更新调整过程中的各权重与偏差,定义评价函数为
 (23)
(23)
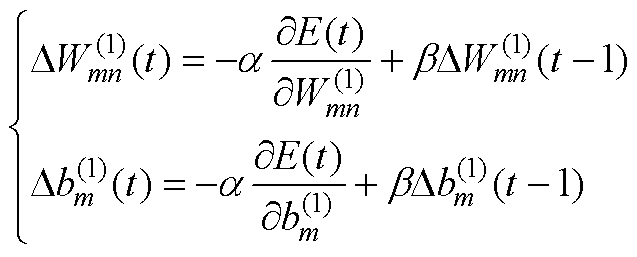
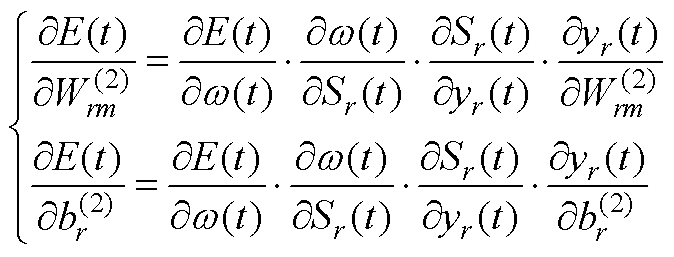
以频率与额定值的偏差量作为评价函数,同时采用梯度下降法对各权重与偏差进行更新,以输出适合当前运行工况的虚拟惯量与阻尼系数,减小系统的频率偏差,详细推导过程见附录式(A1)~式(A9),更新式满足
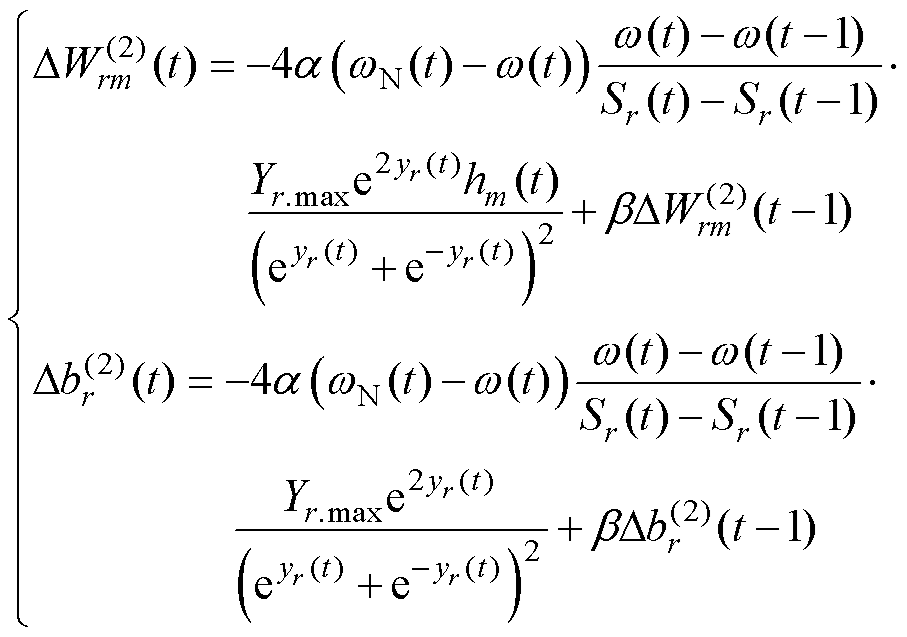 (24)
(24)
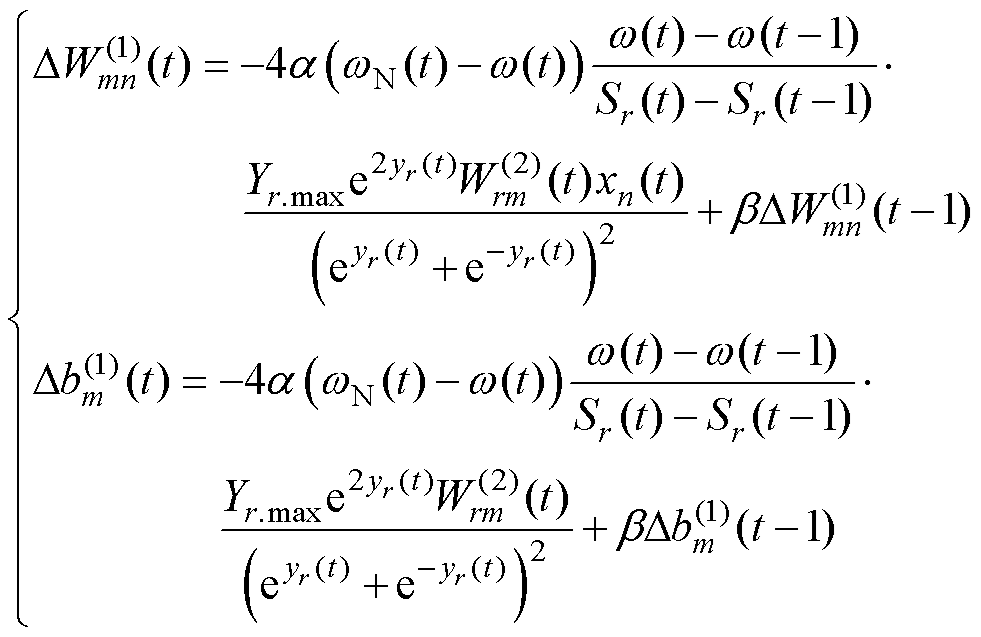 (25)
(25)
式中,a、b分别为MLP神经网络学习率与惯量系数,引入惯量系数以加快收敛并降低参数突变造成的不利影响。特别地,当隐藏层输出为0时,
 ,
, 。
。
3.1节对MLP神经网络的控制原理进行了详细阐述,对每个机组分别设置对应的MLP控制器,在满足约束的前提下,实时动态调整各机组运行参数,动态控制流程如图8所示。
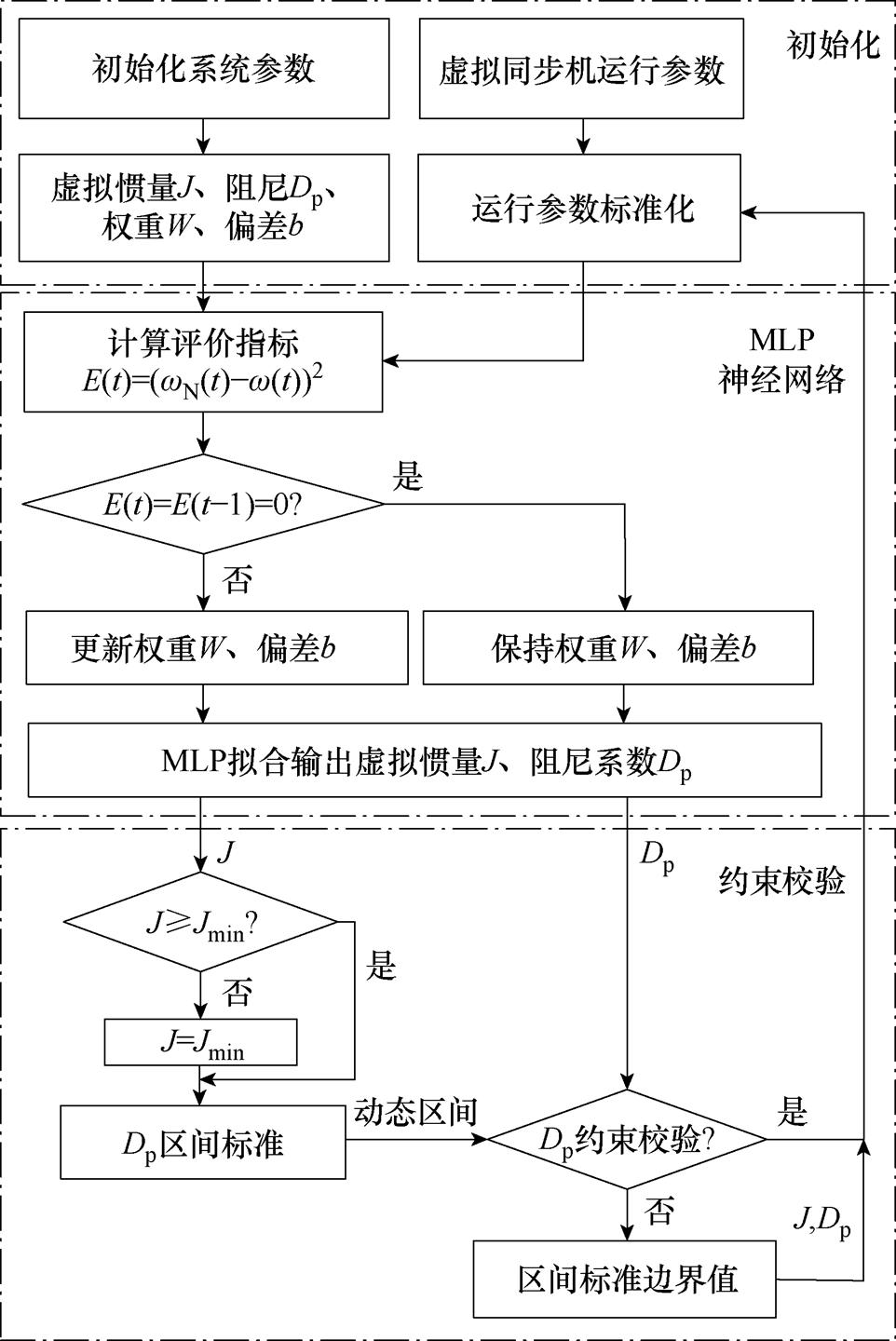
图8 基于神经网络的VSG动态控制流程
Fig.8 VSG dynamic control process based on neural network
(1)系统初始化:初始化系统参数,赋予虚拟惯量、阻尼系数与神经网络权重、偏差初值;采集VSG运行参数,将各参数标准化,通过归一化函数将各参数映射在[0, 1]区间内。
(2)MLP动态控制:计算评价指标,根据采样前后评价指标的变化判断当前权重与偏差参数是否合适。若不合适,则更新权重W与偏差b,通过激活函数输出当前虚拟惯量J与阻尼系数Dp。
(3)约束校验:由于激活函数Yr.max项为各变量的最大值,因此输出校验只需校验最低值约束。当虚拟惯量小于Jmin时,输出Jmin;当满足最小值约束时,输出作为该时刻虚拟惯量。计算输出J对应的阻尼系数动态约束区间,对Dp进行约束校验,满足校验后输出J、Dp,不满足,则取边界值。
(4)动态参数更新:更新后J、Dp均满足单机传输特性与多机振荡约束,将参数输入各机组后,计算下一采样时刻评价指标,进入MLP神经网络循环动态控制环节,动态更新系统参数。
为验证本文所提及多机阻尼惯量耦合振荡约束的多VSG系统动态控制策略的有效性,在Matlab/ Simulink中搭建三机并联VSG系统仿真模型,通过m函数构建三机MLP神经网络模型,各变量具体参数见表3。通过该模型,从MLP控制策略有效性与噪声鲁棒性等方面进行验证分析。
表3 VSG并联系统基本参数
Tab.3 VSG parallel system basic parameters table
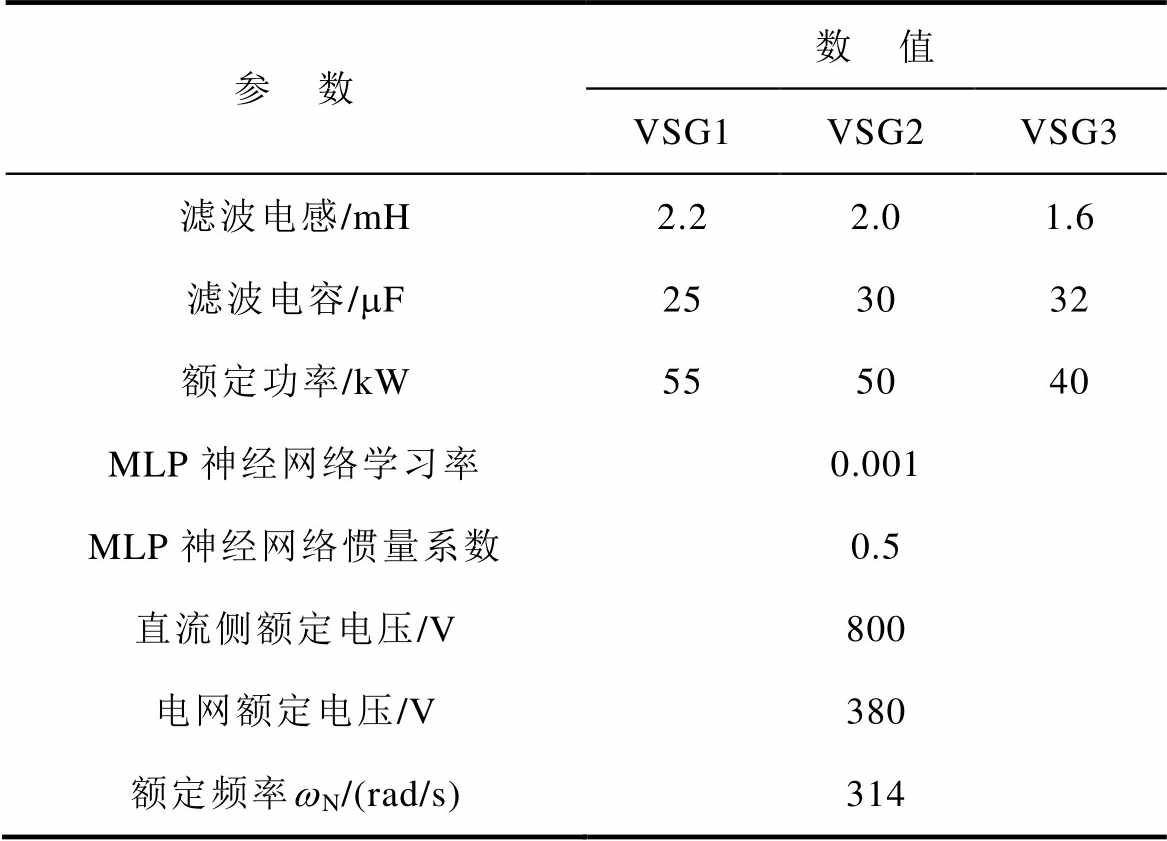
参 数数 值 VSG1VSG2VSG3 滤波电感/mH2.22.01.6 滤波电容/mF253032 额定功率/kW555040 MLP神经网络学习率0.001 MLP神经网络惯量系数0.5 直流侧额定电压/V800 电网额定电压/V380 额定频率wN/(rad/s)314
为验证本文所提策略的有效性,在线路参数相同时,首先对采用常规额定固定参数VSG(Consistent- VSG, CON-VSG)与本文所提多机动态控制参数VSG(Multilayer Perceptron-VSG, MLP-VSG)两种控制方法下的多机组并联系统进行对比分析。设定初始运行时三个机组有功功率参考值均为10 kW,系统总有功功率为30 kW。在0.2 s时负荷增加30 kW,三机组有功参考值调整至20 kW。
图9、图10为三机组神经网络输出的虚拟惯量与角频率曲线。虚线表示CON-VSG参数,见表1。实线表示经MLP实时动态调整的参数。在0.2 s机组有功功率额定值发生变化时,随着频率的增加,虚拟惯量上升;在频率下降时,三机组的虚拟惯量下降。当频率恢复至额定频率时,为了减少超调量,虚拟惯量提升以降低频率跌落。根据三机组参数可知,虚拟惯量上限较大的机组对频率上升抑制能力较好,但调整时间较长,同时在回调阶段具有更高的超调量。相比固定参数而言,采用MLP神经网络动态控制机组对频率波动抑制效果更好。
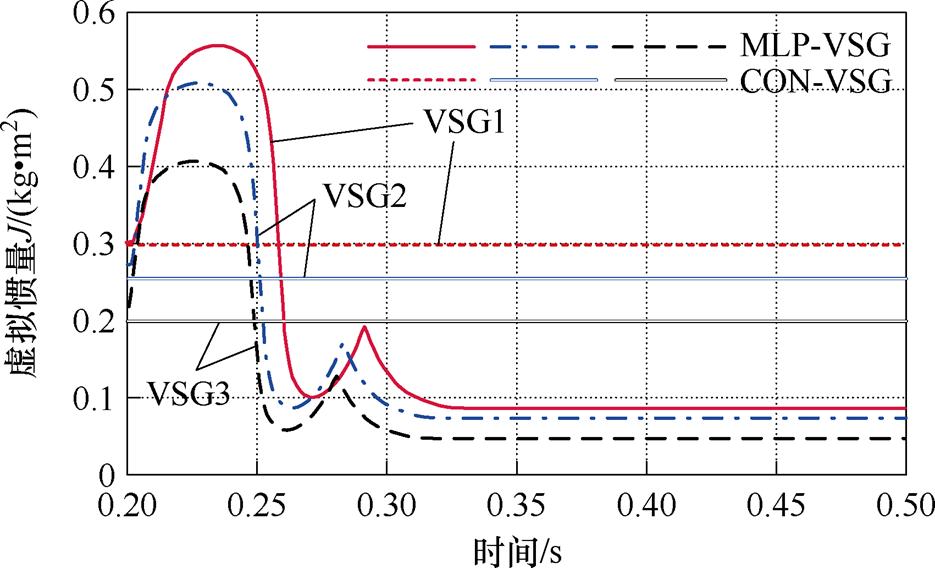
图9 不同控制策略虚拟惯量对比
Fig.9 Comparison of virtual inertia of different control strategies
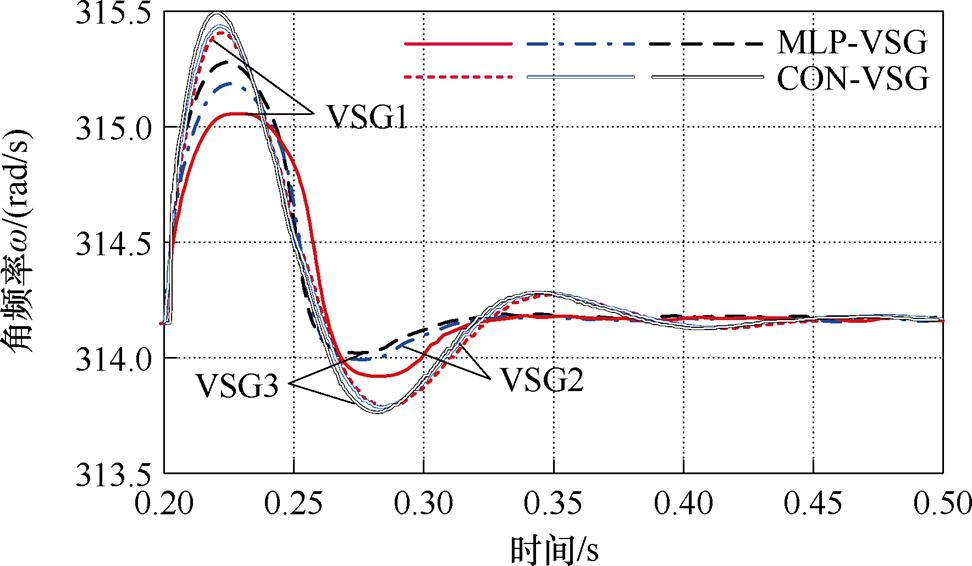
图10 不同控制策略角频率对比
Fig.10 Comparison of angular frequencies of different control strategies
在两种控制方式下的频率超调量与调整时间见表4。MLP-VSG控制方式下,三机组频率最大值均小于CON-VSG控制参数,平均减小了0.28 rad/s。同时在调节过程中最小频率也高于CON-VSG参数时的最小值,平均提高了0.20 rad/s。另外,在MLP- VSG控制参数下,频率稳定时间大幅降低,平均减少了129 ms,降低了48.87%。同时,附图4展示了MLP-VSG控制下三机组阻尼系数约束区间以及阻尼系数实际动态响应值。在虚拟惯量上升阶段,阻尼系数取约束区间内的最小值,一方面为满足调节速度;另一方面考虑单机、多机的稳定裕度;在虚拟惯量达到峰值后,阻尼系数输出值为区间最大值,以抑制调节过程中的振荡。
表4 不同控制策略频率调整特性对比
Tab.4 Comparison of frequency adjustment characteristics of different control strategies
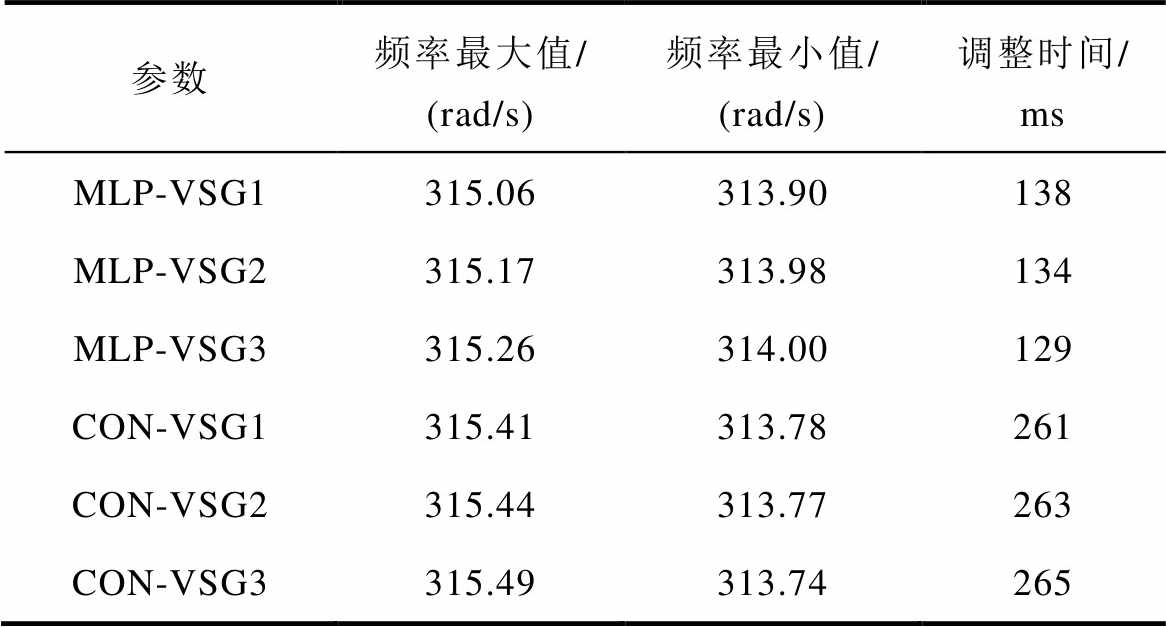
参数频率最大值/ (rad/s)频率最小值/ (rad/s)调整时间/ ms MLP-VSG1315.06313.90138 MLP-VSG2315.17313.98134 MLP-VSG3315.26314.00129 CON-VSG1315.41313.78261 CON-VSG2315.44313.77263 CON-VSG3315.49313.74265
不同控制策略母线有功功率变化对比如图11所示。母线功率波动在CON-VSG参数时超调较高,且调整过程中振荡时间较长,在0.46 s稳定,最大功率超调为9.09 kW。MLP-VSG控制方式能有效抑制功率波动并减小调整时间,最大超调仅为3.73 kW,在0.328 s时稳定。
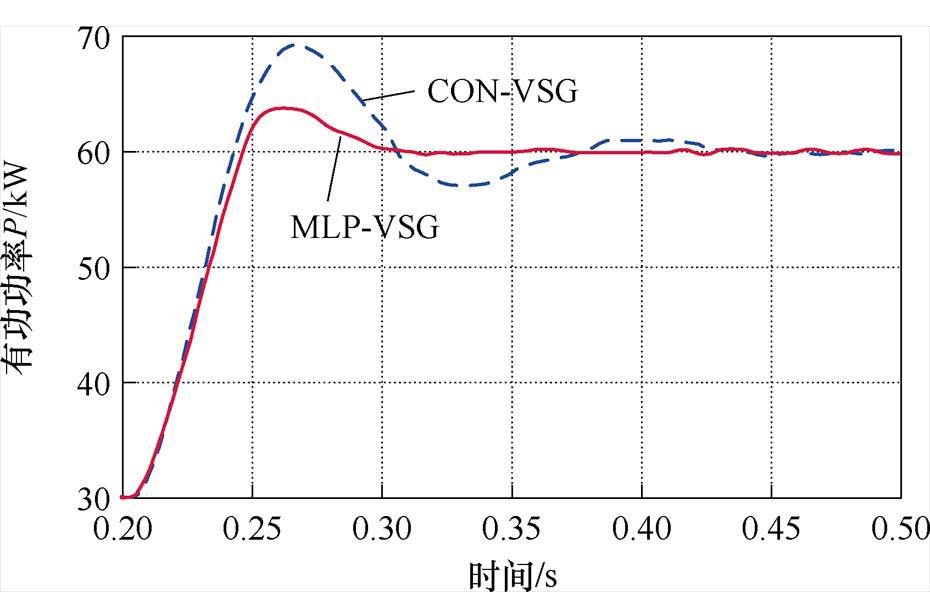
图11 不同控制策略母线有功功率变化对比
Fig.11 Comparison of bus active power changes under different control strategies
考虑实验验证的严谨性,进一步与现有控制策略进行性能的量化对比,增加同样调整虚拟惯量与阻尼系数的改进Bang-Bang VSG(Improved Bang- Bang-VSG, IBB-VSG)算法控制策略[11]与线性化自适应VSG(Self-Adaptive Inertia and Damping-VSG, SAID-VSG)控制策略[29]以及补偿负荷功率的模型预测控制(Model Predictive Control-VSG, MPC- VSG)方法[30]对比分析。
IBB-VSG控制策略原理如下。
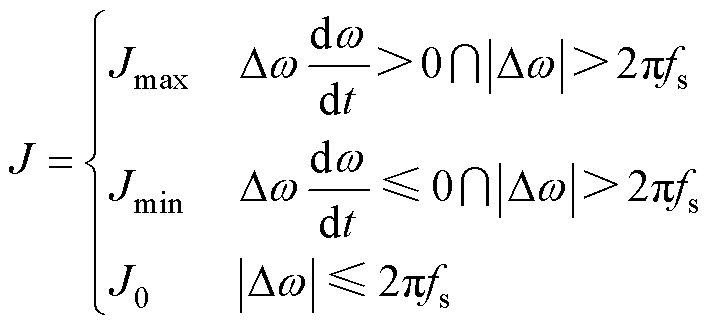 (26)
(26)
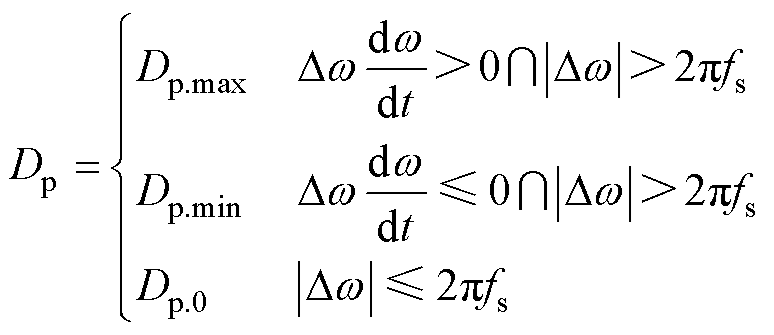 (27)
(27)
式中,fs为稳态时的频率偏差阈值,一般取0.004 Hz。
SAID-VSG控制策略原理如下
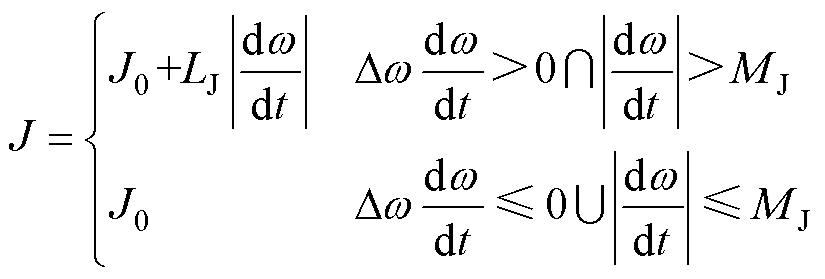 (28)
(28)
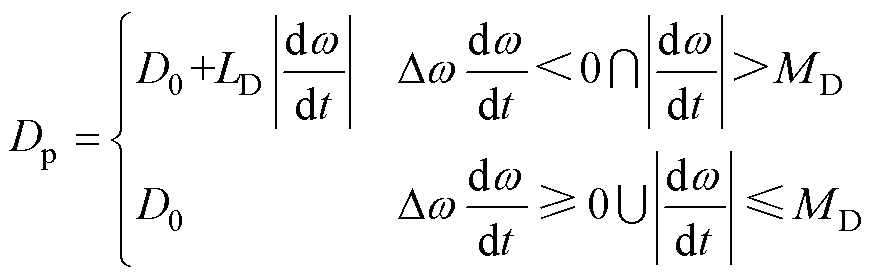 (29)
(29)
式中,LJ、LD为惯量、阻尼调节系数;MJ、MD为惯量、阻尼调节阈值,具体参数见表5。
表5 SAID-VSG控制参数
Tab.5 The SAID-VSG control parameters
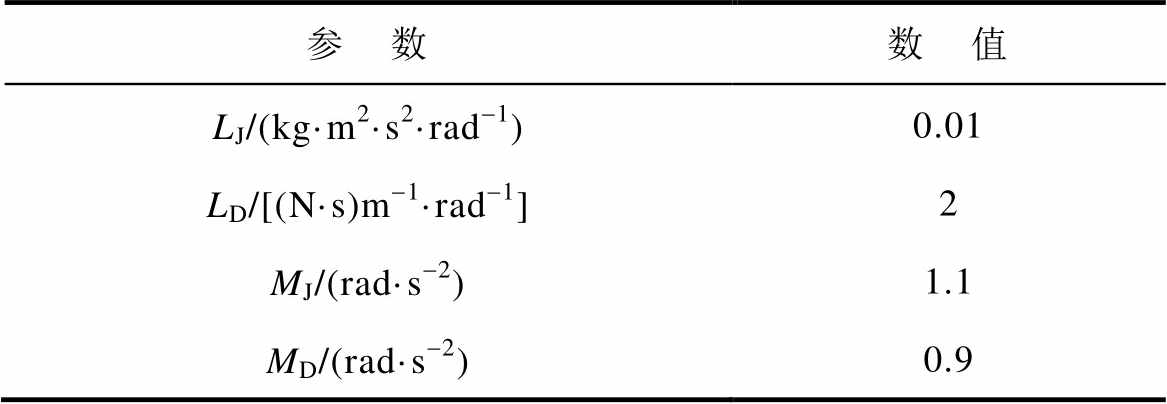
参 数数 值 LJ/(kg·m2·s2·rad-1)0.01 LD/[(N·s)m-1·rad-1]2 MJ/(rad·s-2)1.1 MD/(rad·s-2)0.9
MPC-VSG通过预测方程,引入有功功率补偿量PMPC,以优化功率频率在调节过程中的偏差,具体见文献[30]。在参数相同的基础上,三机组采用不同控制策略,对比系统的动态性能。
以VSG1为例,由于MPC-VSG不涉及虚拟惯量与阻尼的调整,图12、图13分别展示了SAID- VSG与IBB-VSG控制下机组的虚拟惯量与阻尼系数。与MLP-VSG类似,在频率上升时,保持较大惯量系数以抑制频率上升,在回调阶段增加阻尼系数以减少超调量。
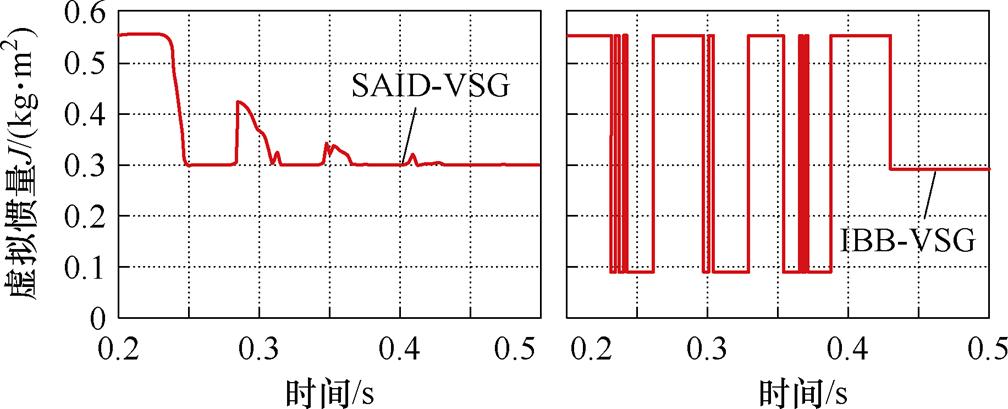
图12 SAID-VSG与IBB-VSG虚拟惯量
Fig.12 Virtual inertia of SAID-VSG and IBB-VSG
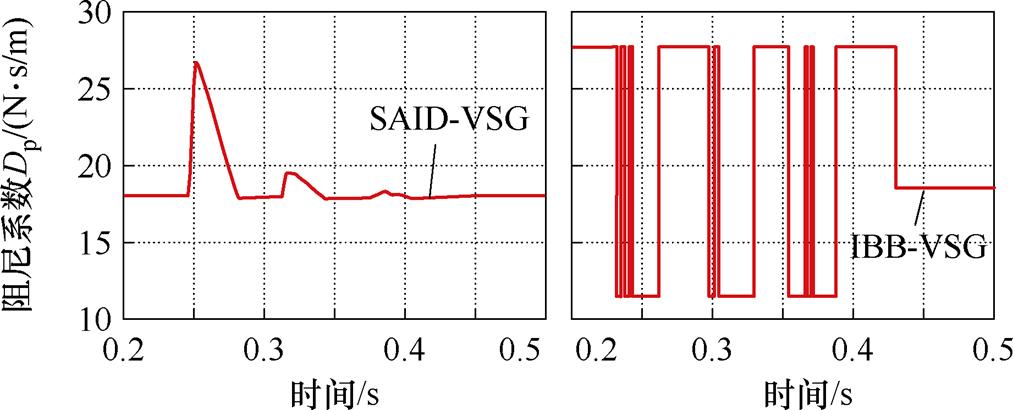
图13 SAID-VSG与IBB-VSG阻尼系数
Fig.13 SAID-VSG and IBB-VSG damping coefficient
图14为VSG1在不同控制策略下的角频率曲线,IBB-VSG虽具有较快的调节速度,回调速度较快,但由于在频率拐点惯量值的突变,频率超调为0.354 rad/s,调节性能较差。MLP-VSG、SAID-VSG、MPC-VSG控制时,均有较低的超调量,最大角频率分别为315.06、315.12、315.15 rad/s,其中SAID- VSG与MPC-VSG角频率动态特征相近。综上所述,本文所提MLP-VSG具有最小超调,同时在恢复过程中振荡时间最短。
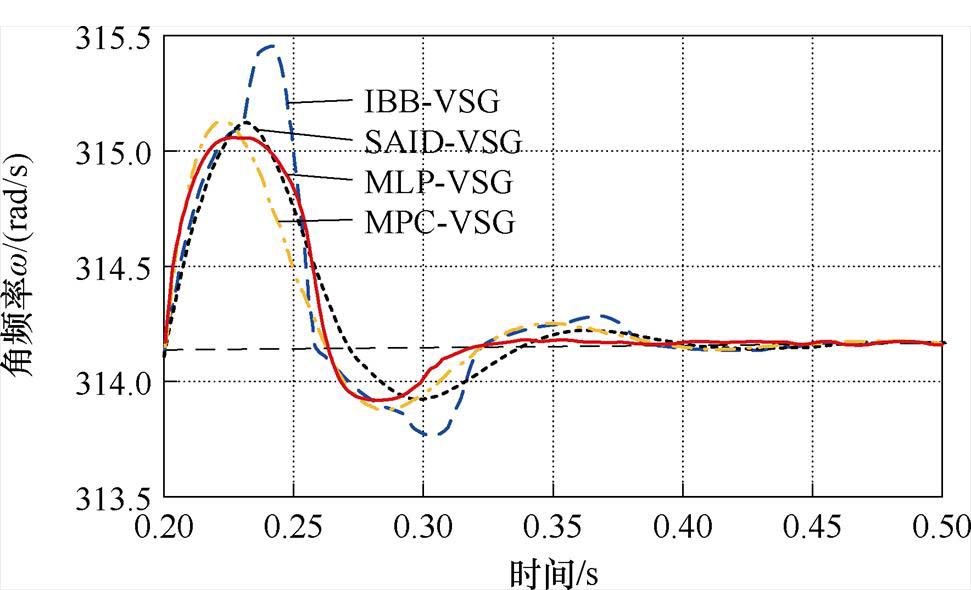
图14 不同策略VSG1角频率变化对比
Fig.14 Comparison of VSG1 angular frequency changes for different strategies
图15展示了不同控制策略下母线功率变化特性,功率曲线特性对比见表6。从图15和表6中可以看出,本文所提MLP-VSG具有最小功率振荡,能够有效地降低功率波动程度。
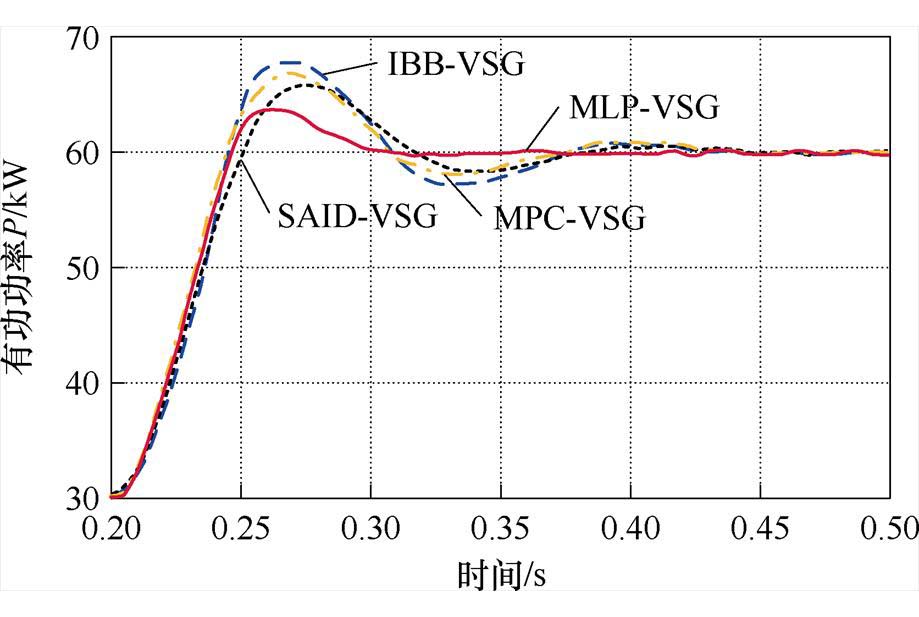
图15 不同控制策略功率振荡抑制效果对比
Fig.15 Comparison of the power oscillation inhibition effect of different control strategies
表6 不同控制策略下功率曲线特性对比
Tab.6 Comparison of power curve characteristics under different control strategies (单位: kW)
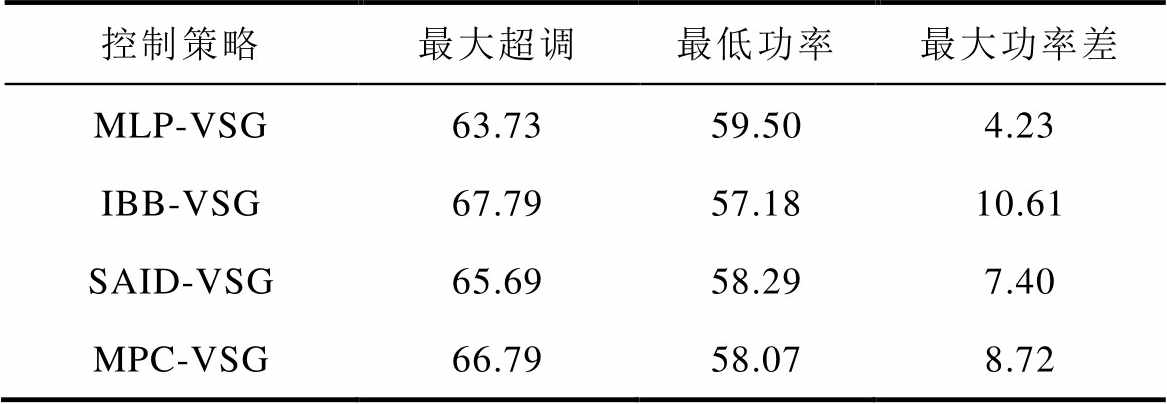
控制策略最大超调最低功率最大功率差 MLP-VSG63.7359.504.23 IBB-VSG67.7957.1810.61 SAID-VSG65.6958.297.40 MPC-VSG66.7958.078.72
考虑多机阻尼惯量耦合特性约束时三机对功率突变响应特性的影响,定义左倾斜线区域为约束条件1(Constrained Condition 1, CC1)。增加右倾斜线区域约束,即不考虑多机耦合约束,定义为约束条件2(Constrained Condition 2, CC2)。同样设置在0.2 s时功率发生改变,观察不同约束区间下三机组的动态响应特性。
表7给出了不同约束条件下极点最大实部数值大小,在CC2时系统根轨迹最大实部位置更加靠近虚轴,在功率给定值发生变化时,即受到阶跃激励后,系统振荡衰减系数较低,调节过程中振荡程度较高,衰减时间较长。
表7 不同约束条件下极点最大实部分布特征
Tab.7 Distribution characteristics of the maximum pole under different constraints
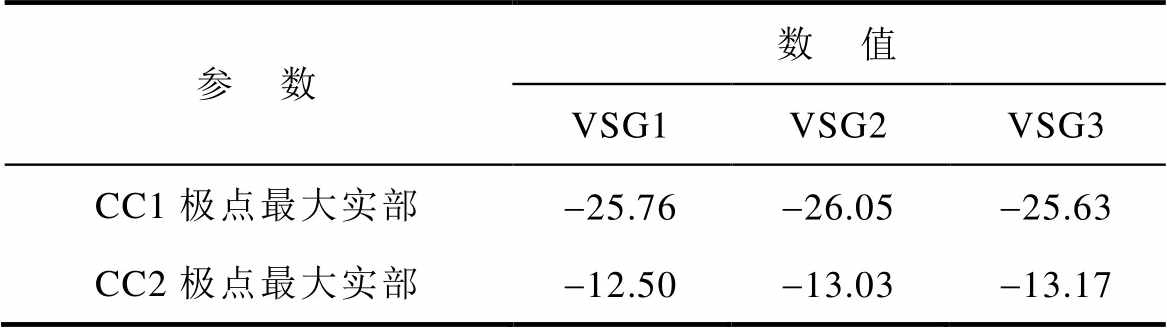
参 数数 值 VSG1VSG2VSG3 CC1极点最大实部-25.76-26.05-25.63 CC2极点最大实部-12.50-13.03-13.17
图16展示了三机调节过程中的频率变化,CC2下三机具有更高的虚拟惯量,调整过程峰值较低,但此时阻尼惯量的增加对频率抑制的效果相差不大。与此同时,CC2相比CC1调整时间增加,频率在0.39 s左右稳定,与CC1下0.33 s振荡时间相比,增加了18%。验证了多机阻尼惯量耦合约束能够提高系统稳定性,减小系统振荡程度。
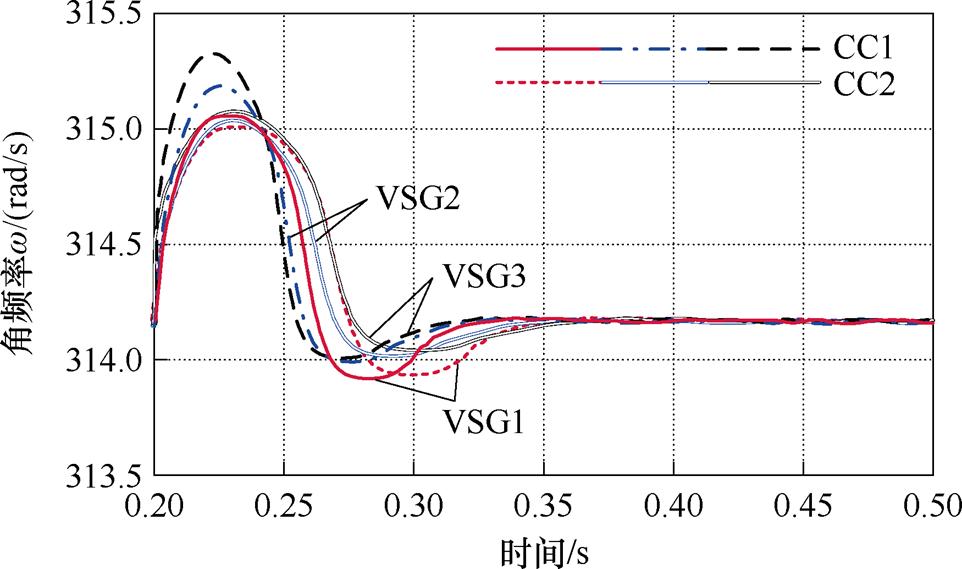
图16 不同约束条件下三机组频率振荡特征
Fig.16 Frequency oscillation characteristics of three units under different constraints
MLP神经网络的输入需对每台VSG控制环参数采样,得到不同时刻采样数据输入MLP控制器,以得到当前所需控制参数。进一步比较不同程度噪声对MLP控制器输出特性与控制性能的影响。
本节以VSG1为例,设置不同信噪比(Signal- to-Noise Ratio, SNR)的加性高斯白噪声(Additive White Gaussian Noise, AWGN),其中采样信号基准采用指数加权移动平均(Exponential Weighted Moving Average, EWMA)迭代更新。
图17为不同信噪比下MLP神经网络输出虚拟惯量与该参数控制下的机组角频率。通过对比不同SNR下MLP输出虚拟惯量与VSG角频率曲线,分析输入噪声对控制性能的影响。在采样噪声较大时,MLP控制器输出在部分控制区间受到影响,主要体现为在变化率较低区间出现高频低幅振荡。在输入噪声影响下,MLP输出值仍能保持原有的变化特征趋势,提供调节过程中合适的虚拟惯量等参数,机组保持较好的动态调节性能。可认为MLP神经网络具有一定的噪声鲁棒性,在一定的输入噪声下仍能有效地调节控制参数以满足系统实时调节需求。
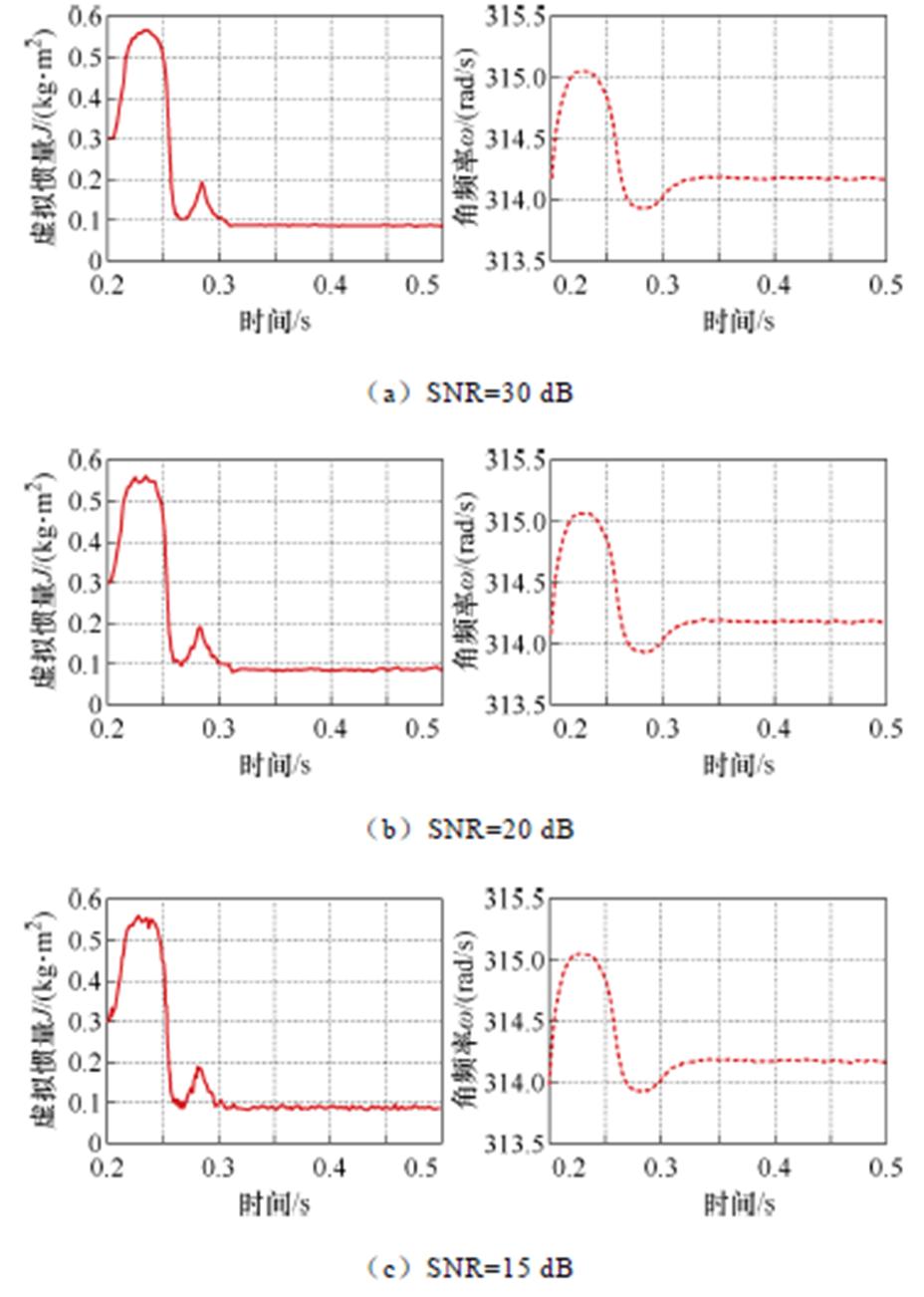
图17 不同噪声下MLP控制器控制特性
Fig.17 Control characteristics of the MLP controller under different noise
针对多VSG并联系统采用传统控制方式出现的有功振荡、调节速度较慢等新问题,本文提出一种考虑阻尼惯量耦合振荡约束的VSG并联动态控制策略,主要结论如下:
1)构建了多VSG并联系统小信号模型,分析了并联系统的有功振荡特性与虚拟惯量、阻尼系数的耦合关系,基于此,确立了考虑多机振荡特性的耦合约束条件,使各VSG机组参数调整范围更加精确,为VSG动态控制策略下各参数约束区间的确立提供理论依据。
2)提出一种适用于多机并联系统的VSG动态控制策略,综合考虑单机与多机参数稳定性、动态响应特性约束,通过MLP神经网络实现了各机组虚拟惯量与阻尼系数的实时解耦控制;相比现有控制方式,所提方法能有效地抑制频率和功率超调,减少动态调整时间。
值得关注的是,本文虽实现了多机并联系统的动态解耦控制,但对各机组参数的动态调整优化能力有限,对极端条件下的振荡抑制研究尚有不足。如何将人工智能与本文策略深度融合,进一步提升本文策略在不同场景的泛化性和极端工况的适用性,是下一步的研究方向。
附 录
VSG1、VSG2、VSG3机组虚拟惯量与阻尼惯量比改变时三机组极点最大实部分别如附图1~附图3所示。三机组实时阻尼区间与阻尼系数如附图4所示。
式(24)与式(25)的权重偏差更新公式详细表达式分别为
 (A1)
(A1)
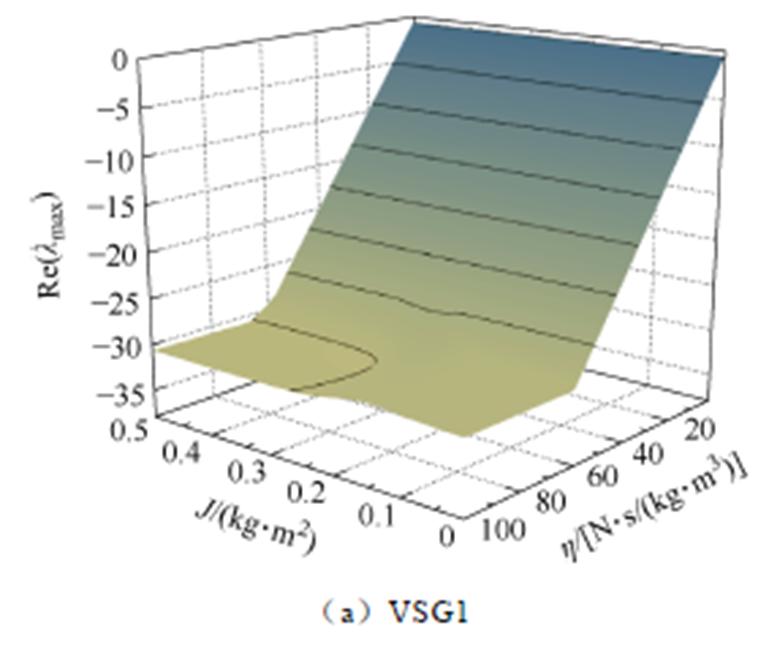
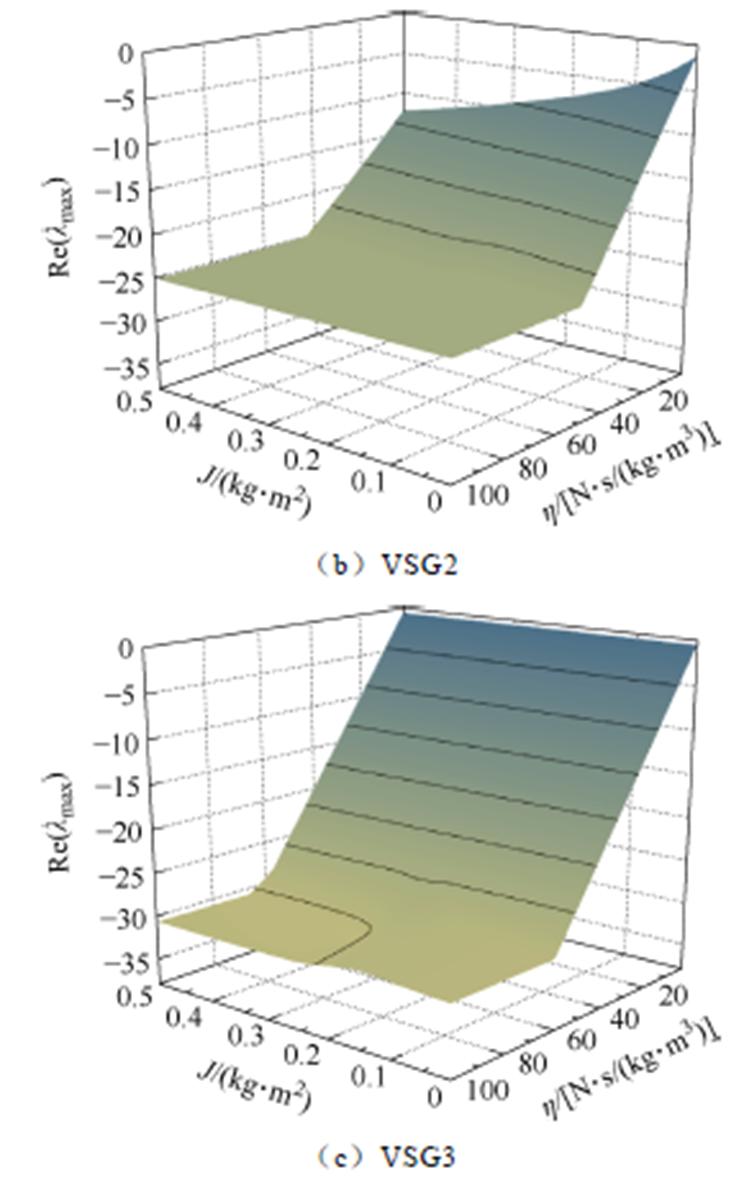
附图1 VSG1机组虚拟惯量与阻尼惯量比改变时三机组极点最大实部
App.Fig.1 The maximum real part of the pole of the VSG1 unit when the ratio of virtual inertia to damping inertia changes
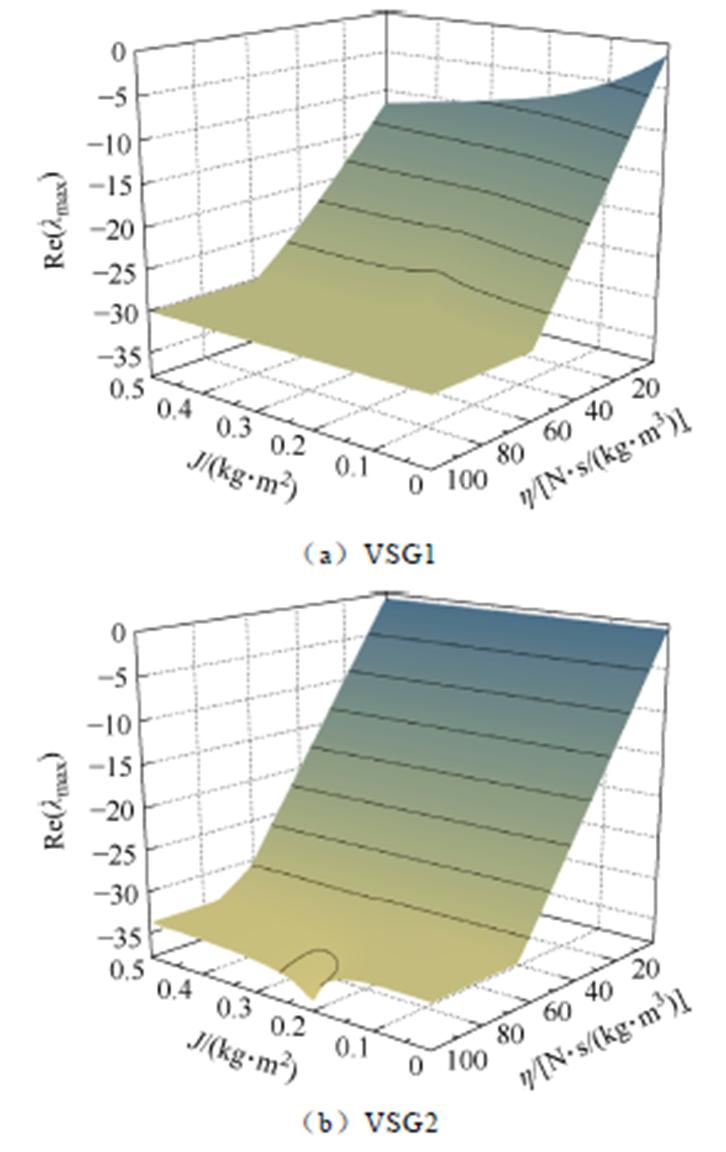
附图2 VSG2机组虚拟惯量与阻尼惯量比改变时三机组极点最大实部
App.Fig.2 The maximum real part of the pole of the VSG2 unit when the ratio of virtual inertia to damping inertia changes
 (A2)
(A2)
式(A1)与式(A2)分别为输出层对隐藏层、隐藏层对输入层权重与偏差梯度下降法更新公式,评价函数对于权重偏差的偏导数难以从控制器参数直接获得,对式(A1)进行改写,可表示为
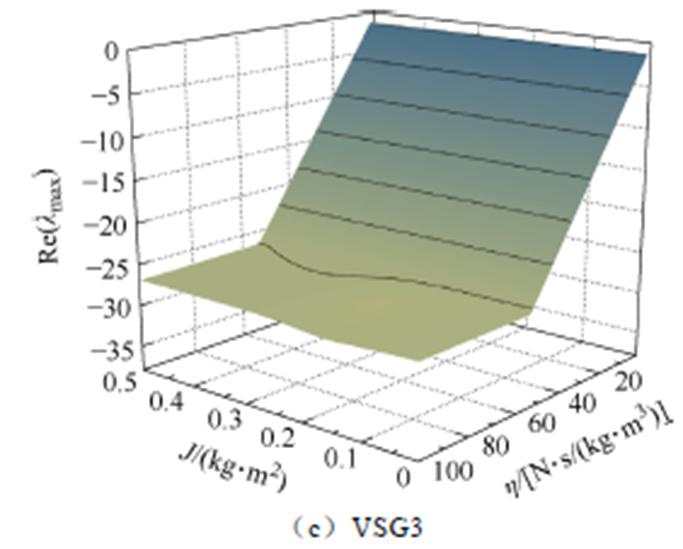
附图3 VSG3机组虚拟惯量与阻尼惯量比改变时三机组极点最大实部
App.Fig.3 The maximum real part of the pole of the VSG3 unit when the ratio of virtual inertia to damping inertia changes
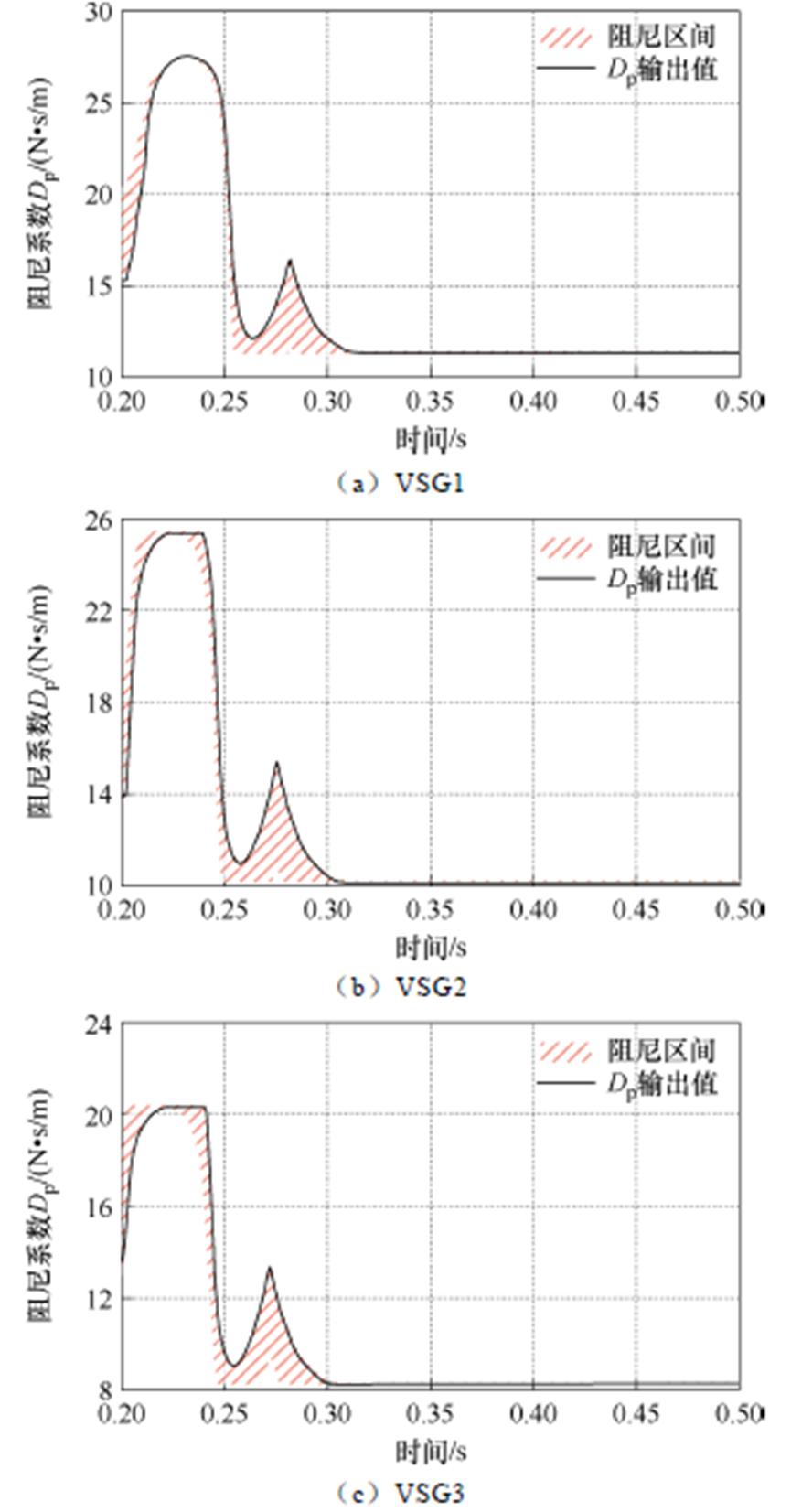
附图4 三机组实时阻尼区间与阻尼系数
App.Fig.4 Real-time damping interval and damping coefficient of the three units
 (A3)
(A3)
式中,各参数均为当前采样时刻或前一时刻MLP网络中间值,可从MLP神经网络存储变量中直接获取。可得
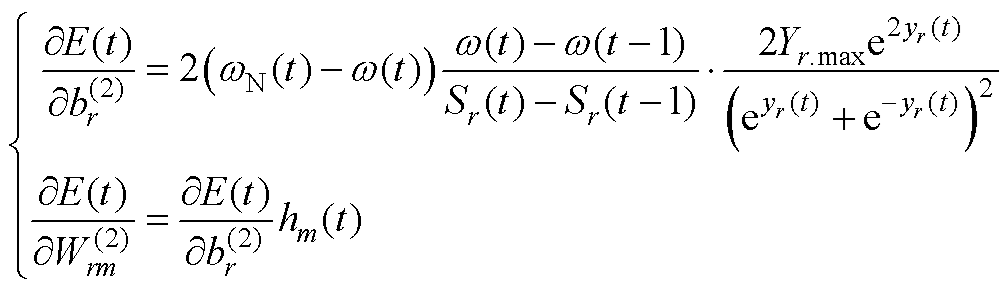 (A4)
(A4)
MLP神经网络梯度公式中权重、偏差导数可由式(A4)计算得出。同理,将式(A2)改写得到
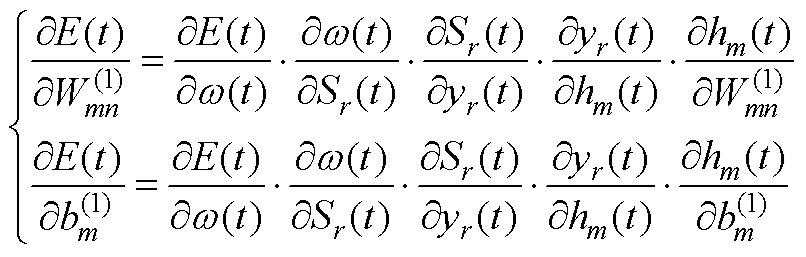 (A5)
(A5)
式中, ;
; 、
、 经过ReLU激活函数,需判断该时刻的隐藏层输入为
经过ReLU激活函数,需判断该时刻的隐藏层输入为
 (A6)
(A6)
 (A7)
(A7)
结合式(A5)~式(A7)可得当 时式(A5)表达式为
时式(A5)表达式为
 (A8)
(A8)
当 ,梯度为零。将式(A4)、式(A8)分别代入式(A1)、式(A2),得到式(25)和式(26),得到各层权重与偏差的更新公式。
,梯度为零。将式(A4)、式(A8)分别代入式(A1)、式(A2),得到式(25)和式(26),得到各层权重与偏差的更新公式。
参考文献
[1] 黄萌, 舒思睿, 李锡林, 等. 面向同步稳定性的电力电子并网变流器分析与控制研究综述[J]. 电工技术学报, 2024, 39(19): 5978-5994.
Huang Meng, Shu Sirui, Li Xilin, et al. A review of synchronization-stability-oriented analysis and control of power electronic grid-connected converters[J]. Transactions of China Electrotechnical Society, 2024, 39(19): 5978-5994.
[2] Liu Zhenxiang, Chen Yanbo, Zhang Zhi, et al. Identification of vulnerable nodes and sensitivity analysis of control parameters for multiple grid- connected converter systems[J]. IEEE Transactions on Sustainable Energy, 2025, 16(3): 1602-1612.
[3] 胡光, 庄可好, 高晖胜, 等. 低惯量交流系统并网变流器次/超同步振荡分析[J]. 电工技术学报, 2024, 39(8): 2250-2264.
Hu Guang, Zhuang Kehao, Gao Huisheng, et al. Sub/super synchronous oscillation analysis of grid-connected converter in low inertia AC system[J]. Transactions of China Electrotechnical Society, 2024, 39(8): 2250-2264.
[4] Chen Yanbo, Li Xiaoxue, Zhang Zhi. Risk assessment of rail transit systems with variable renewable energy based on uncertain random theory[J]. International Journal of Electrical Power & Energy Systems, 2025, 164: 110441.
[5] 李兆伟, 方勇杰, 吴雪莲, 等. 频率紧急控制中动作时延和措施量对低惯量系统控制有效性的影响[J]. 电工技术学报, 2024, 39(17): 5394-5405.
Li Zhaowei, Fang Yongjie, Wu Xuelian, et al. Influence of action delay and amount on the control effectiveness of low inertia systems in frequency emergency control[J]. Transactions of China Elec- trotechnical Society, 2024, 39(17): 5394-5405.
[6] 刘思佳, 刘海涛, 张隽, 等. 基于等效阻抗的虚拟同步机电压支撑影响因素分析与改进控制策略研究[J]. 电工技术学报, 2025, 40(9): 2738-2751.
Liu Sijia, Liu Haitao, Zhang Jun, et al. Research on the analysis of virtual synchronous generator voltage support influence factors and improvement control strategies based on equivalent impedance[J]. Transactions of China Electrotechnical Society, 2025, 40(9): 2738-2751.
[7] Tong Wenxuan, Lu Zhengang, Chen Yanbo, et al. Enhancing modular gravity energy storage plants: a hybrid strategy for optimal unit capacity con- figuration[J]. Applied Energy, 2025, 378: 124774.
[8] 赵冬梅, 宋晨铭, 冯向阳, 等. 100%新能源场景下考虑频率稳定约束的源网荷储一体化系统储能优化配置[J]. 电工技术学报, 2025, 40(7): 2146-2161.
Zhao Dongmei, Song Chenming, Feng Xiangyang, et al. The optimal configuration of energy storage in the source-grid-load-storage integrated system con- sidering frequency stability constraints in 100% new energy scenarios[J]. Transactions of China Elec- trotechnical Society, 2025, 40(7): 2146-2161.
[9] 王伟, 周少泽, 黄萌, 等. 构网型技术: 演进历程、功能定位与应用展望[J]. 电力系统自动化, 2025, 49(1): 1-13.
Wang Wei, Zhou Shaoze, Huang Meng, et al. Grid- forming technologies: evolution history, function, and application prospects[J]. Automation of Electric Power Systems, 2025, 49(1): 1-13.
[10] Xiong Xiaoling, Li Xinyue, Luo Bochen, et al. An additional damping torque method for low-frequency stability enhancement of virtual synchronous generators[J]. IEEE Transactions on Power Elec- tronics, 2024, 39(12): 15858-15869.
[11] Li Jin, Wen Buying, Wang Huaiyuan. Adaptive virtual inertia control strategy of VSG for micro-grid based on improved Bang-Bang control strategy[J]. IEEE Access, 2019, 7: 39509-39514.
[12] Alipoor J, Miura Y, Ise T. Power system stabilization using virtual synchronous generator with alternating moment of inertia[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2015, 3(2): 451-458.
[13] Mentesidi K, Garde R, Aguado M, et al. Imple- mentation of a fuzzy logic controller for virtual inertia emulation[C]//2015 International Symposium on Smart Electric Distribution Systems and Tech- nologies (EDST), Vienna, Austria, 2015: 606-611.
[14] 曾国辉, 廖鸿飞, 赵晋斌, 等. 直流微网双向DC/DC变换器虚拟惯量和阻尼系数自适应控制策略[J]. 电力系统保护与控制, 2022, 50(6): 65-73.
Zeng Guohui, Liao Hongfei, Zhao Jinbin, et al. A self-adaptive control strategy of virtual inertia and a damping coefficient for bidirectional DC-DC con- verters in a DC microgrid[J]. Power System Pro- tection and Control, 2022, 50(6): 65-73.
[15] 张兴伟, 谭丽平, 陈文浩, 等. 基于二次系统优化的储能变流器惯性提升方法[J]. 电力系统保护与控制, 2021, 49(8): 128-135.
Zhang Xingwei, Tan Liping, Chen Wenhao, et al. Inertia lifting method of energy storage converter based on secondary system optimization[J]. Power System Protection and Control, 2021, 49(8): 128-135.
[16] 王亚军, 杨立波, 马斌, 等. 虚拟同步机惯量及阻尼系数协调优化方法[J]. 电力系统保护与控制, 2022, 50(19): 88-98.
Wang Yajun, Yang Libo, Ma Bin, et al. Coordination and optimization strategy of virtual inertia and damping coefficient of a virtual synchronous generator[J]. Power System Protection and Control, 2022, 50(19): 88-98.
[17] Li Meiyi, Huang Wentao, Tai Nengling, et al. A dual-adaptivity inertia control strategy for virtual synchronous generator[J]. IEEE Transactions on Power Systems, 2020, 35(1): 594-604.
[18] 黄林彬, 辛焕海, 黄伟, 等. 含虚拟惯量的电力系统频率响应特性定量分析方法[J]. 电力系统自动化, 2018, 42(8): 31-38.
Huang Linbin, Xin Huanhai, Huang Wei, et al. Quantified analysis method of frequency response characteristics for power systems with virtual inertia[J]. Automation of Electric Power Systems, 2018, 42(8): 31-38.
[19] 任碧莹, 邱姣姣, 刘欢, 等. 基于虚拟同步发电机双机并联系统的参数自调节优化控制策略[J]. 电工技术学报, 2019, 34(1): 128-138.
Ren Biying, Qiu Jiaojiao, Liu Huan, et al. Optimization control strategy of self-adjusting parameter based on dual-parallel virtual synchronous generators[J]. Transactions of China Electrotechnical Society, 2019, 34(1): 128-138.
[20] 王振浩, 张越, 成龙, 等. 多参数协同自适应的改进虚拟同步控制策略[J]. 电网技术, 2023, 47(6): 2403-2414.
Wang Zhenhao, Zhang Yue, Cheng Long, et al. Improved virtual synchronization control strategy with multi-parameter adaptive collaboration[J]. Power System Technology, 2023, 47(6): 2403-2414.
[21] 张玉璇, 杜春水, 施其国, 等. 并联逆变器参数协同自适应VSG控制策略[J]. 电机与控制学报, 2024, 28(9): 47-59.
Zhang Yuxuan, Du Chunshui, Shi Qiguo, et al. Parametric cooperative adaptive VSG control strategy for parallel inverters[J]. Electric Machines and Control, 2024, 28(9): 47-59.
[22] 秦晓辉, 苏丽宁, 迟永宁, 等. 大电网中虚拟同步发电机惯量支撑与一次调频功能定位辨析[J]. 电力系统自动化, 2018, 42(9): 36-43.
Qin Xiaohui, Su Lining, Chi Yongning, et al. Functional orientation discrimination of inertia support and primary frequency regulation of virtual synchronous generator in large power grid[J]. Auto- mation of Electric Power Systems, 2018, 42(9): 36-43.
[23] Yao Fengjun, Zhao Jinbin, Li Xiangjun, et al. RBF neural network based virtual synchronous generator control with improved frequency stability[J]. IEEE Transactions on Industrial Informatics, 2021, 17(6): 4014-4024.
[24] 张赟宁, 郭钟仁, 张磊. 基于RBF神经网络的分数阶虚拟同步机控制策略[J/OL]. 电力系统及其自动化学报, 1-7[2025-02-20]. https://link.cnki.net/doi/ 10.19635/j.cnki.csu-epsa.001536.
Zhang Yunning, Guo Zhongren, Zhang Lei. Fractional- order virtual synchronous generator control strategy based on RBF neural networks[J/OL]. Proceedings of the CSU-EPSA, 1-7[2025-02-20]. https://link.cnki. net/doi/10.19635/j.cnki.csu-epsa.001536.
[25] 张子星, 赵晋斌, 曾志伟, 等. 基于RBF的VSG虚拟惯量和动态阻尼补偿自适应控制[J]. 电力系统保护与控制, 2024, 52(2): 155-164.
Zhang Zixing, Zhao Jinbin, Zeng Zhiwei, et al. VSG virtual inertia and dynamic damping compensation adaptive control based on RBF[J]. Power System Protection and Control, 2024, 52(2): 155-164.
[26] 奚鑫泽, 黄英博, 邢超. 一种多虚拟同步机并联系统虚拟动态互阻尼控制方法[J/OL]. 电网技术, 1-10[2025-02-20]. https://link.cnki.net/doi/10.13335/ j.1000-3673.pst.2024.0080.
Xi Xinze, Huang Yingbo, Xing Chao. A virtual dynamic mutual damping control method for multi- VSGs parallel system[J/OL]. Power System Tech- nology, 1-10[2025-02-20]. https://link.cnki.net/doi/ 10.13335/j.1000-3673.pst.2024.0080.
[27] 栗峰, 丁杰, 周才期, 等. 新型电力系统下分布式光伏规模化并网运行关键技术探讨[J]. 电网技术, 2024, 48(1): 184-199.
Li Feng, Ding Jie, Zhou Caiqi, et al. Key technologies of large-scale grid-connected operation of distributed photovoltaic under new-type power system[J]. Power System Technology, 2024, 48(1): 184-199.
[28] Xu Haizhen, Yu Changzhou, Liu Chun, et al. An improved virtual inertia algorithm of virtual syn- chronous generator[J]. Journal of Modern Power Systems and Clean Energy, 2020, 8(2): 377-386.
[29] Li Dongdong, Zhu Qianwei, Lin Shunfu, et al. A self-adaptive inertia and damping combination control of VSG to support frequency stability[J]. IEEE Transa- ctions on Energy Conversion, 2017, 32(1): 397-398.
[30] Long Bo, Liao Yong, Chong K T, et al. MPC- controlled virtual synchronous generator to enhance frequency and voltage dynamic performance in islanded microgrids[J]. IEEE Transactions on Smart Grid, 2021, 12(2): 953-964.
Abstract With the acceleration of the pace of transformation of the energy structure, the scale of grid access for renewable energy, represented by wind and solar energy, has expanded significantly. The virtual synchronous generator (VSG) control method is often employed to enhance the weak damping and low inertia characteristics of new power systems, thereby providing support capabilities for the power grid. However, a high proportion of virtual synchronous generator access exacerbates the active power oscillation and frequency deviation problems in the system. Still, it lacks an in-depth study on the coupling characteristics of control parameters between multiple units. This paper proposes a dynamic control strategy for a parallel virtual synchronous generator system that considers damped inertial coupled oscillation constraints. Based on the coupling characteristics between multiple units, a dynamic control model using a multi-layer perceptron (MLP) neural network is designed.
First, this paper derives the active power transfer function of a multi-machine parallel system and analyzes the damping characteristics of inertially coupled oscillations. In multi-machine parallel systems, the active oscillation characteristics are mainly affected by the unit with the smallest inertial damping ratio. Secondly, based on the rated capacity of the virtual synchronous generator, the dynamic characteristics of a single unit and the oscillation characteristics of multiple machines are comprehensively considered. The adjustment parameters of each unit are then divided into intervals. Finally, based on the obtained dynamic interval constraints, a multi-layer perceptron neural network dynamic control model is constructed for each unit. By monitoring the frequency changes and frequency deviations of each unit in real-time, the virtual inertia and damping coefficients of each unit are dynamically decoupled, reducing the active power and frequency oscillations of the system.
Compared with traditional fixed parameters and existing dynamic control strategies, the proposed method can better suppress active power oscillation and reduce adjustment time. Compared with the technique without coupled oscillation constraints between units, the proposed method accelerates the dynamic adjustment speed when the power is suddenly changed. Further experiments demonstrate that the control strategy based on the MLP neural network exhibits good noise robustness.
The following conclusions can be drawn. The coupling relationship between the active oscillation characteristics and virtual inertia and damping coefficients in the parallel system is analyzed, and a coupling constraint that considers the oscillation characteristics of multiple machines is established. A dynamic control strategy suitable for a multi-machine parallel system is proposed, considering the stability and dynamic response characteristics of single-machine and multi-machine parameters. The multi-layer perceptron neural network realizes real-time decoupling control of the virtual inertia and damping coefficients of each unit. Compared to existing control methods, the proposed method effectively suppresses frequency and power overshoot while reducing the dynamic adjustment time.
Keywords:Virtual synchronous generator, multi-machine system, damping-inertia coupling, multilayer perceptron (MLP) neural network, dynamic control
中图分类号:TM712
DOI: 10.19595/j.cnki.1000-6753.tces.250264
国家自然科学基金项目(U24B2083)、国家资助博士后研究人员计划项目(GZC20240463)和中国博士后科学基金面上项目(2024M750893)资助。
收稿日期 2025-02-20
改稿日期 2025-04-28
陈艳波 男,1982年生,博士,教授,研究方向为新能源电力系统调度与控制、综合能源系统、人工智能。
E-mail: chenyanbo@ncepu.edu.cn
张 智 男,1994年生,博士,讲师,研究方向为新能源电力系统规划与运行。
E-mail: zz_dqgc@163.com(通信作者)
(编辑 陈 诚)