图1 异构新能源并网系统主电路
Fig.1 The main circuit of the grid-connected system of heterogeneous new energy sources
摘要 随着沙戈荒大基地和海上风电基地快速发展,构网型换流器因其可主动构建电网电压、提升系统阻尼惯量等优势逐渐被重视起来,新能源集群呈现跟网型与构网型控制策略并存的异构趋势。然而强非线性作用下异构新能源并网系统的动态稳定机理更加复杂,振荡风险加剧。为了探究异构新能源并网系统的振荡失稳机理,该文首先建立异构新能源并网系统的非线性状态空间模型。然后,基于分岔理论分析并网系统受扰后的非线性动力学行为,研究单参数和双参数变化下的分岔点和分岔类型,揭示了参数变化时的相图轨迹演化规律。进一步通过各参数分岔特性构建了保障系统稳定运行的参数稳定域,并运用特征值分析法分析分岔点附近的特征值行为,得出不同参数变化下的振荡失稳特征。最后,基于Matlab/Simulink建立的异构新能源并网系统仿真算例验证了理论分析结果的正确性。
关键词:跟网型换流器 构网型换流器 分岔特性 参数稳定域 振荡失稳特征
随着“双碳”目标的持续推进,我国正大力发展以风电、光伏为代表的新能源电力系统[1]。并网换流器作为新能源接入电网的关键设备,得到广泛应用[2]。然而,电力电子设备的大规模接入改变了电力系统的动态特性,也带来了新的稳定性问题[3]。目前市场上应用最多的并网换流器主要是跟网型(Grid-Following, GFL)换流器,通过锁相环(Phase Locked Loop, PLL)装置追踪并网点的电压和相位,实现与电网同步运行[4]。但随着换流器装置在新型电力系统中的占比不断增加,外特性表现为电压源的构网型(Grid-Forming, GFM)换流器被逐渐重视起来[5]。构网型换流器的虚拟同步机(Virtual Synchronous Generator, VSG)控制环节具有与同步机相似的惯量和阻尼特性,可以为电网提供频率和电压支撑,改善跟网型换流器振荡失稳问题[6]。所以,跟网型与构网型控制策略并存的异构系统将成为未来新能源并网的主流趋势。
目前,国内外许多学者对异构新能源并网系统的稳定性进行了研究,并取得了丰硕的成果。文献[7-8]基于跟网型和构网型变流器的阻抗模型构建了Nyquist稳定判据,充分考虑了系统参数对稳态工作点的影响。文献[9]分析了跟/构互联系统内部控制回路和外部阻抗特性的关系,通过灵敏度分析定位了不同场景下影响系统稳定性的关键回路。但以上方法对模型过于简化,难以考虑复杂因素以及详细的动态过程。文献[10-12]通过建立跟网型和构网型并联系统的小信号状态空间方程,基于特征值分析法和参与因子法分析了影响系统稳定性的关键因素。虽然能直观地反映系统的动态特性,但小信号稳定性分析要求扰动足够小,仅能对工作点附近的稳定性进行分析,难以精准解释系统持续振荡以及振荡失稳后的动力学现象。文献[13-14]通过建立并网系统的非线性状态空间模型,基于分岔理论等非线性分析方法研究了单参数变化下电力系统的动态特性,解释了发生持续振荡现象的原因。然而在实际工程中振荡调节涉及多种控制协调作用,多参数作用下系统受扰特性更为复杂。并且上述稳定性分析方法均建立在参数固定的模型上,而在某些工况下参数大幅值波动,各控制器参数不匹配,也会导致振荡失稳现象的发生[15]。所以,系统各参数的稳定域构建也是非常有必要的。
综上所述,早期文献对于异构新能源并网系统的稳定性研究已经有了一定的基础,但是对于并网系统中多参数的非线性特性及参数稳定域构建还相对欠缺,亟须开展相关研究。本文从分岔理论角度出发,首先通过分析异构新能源并网系统的主电路结构及控制策略建立了系统的22阶状态空间模型。然后对模型中涉及的单参数以及各环节协同控制的双参数进行分岔特性分析,利用分岔图和相平面轨迹图深入研究系统的非线性动力学行为。进一步通过各参数分岔特性构建系统的参数稳定域,并根据特征值分析法分析稳定域边界及不稳定区域内各分岔点附近的特征根变化,明晰振荡失稳特征。最后对多组异构新能源并网系统进行时域仿真分析,验证理论分析的正确性。
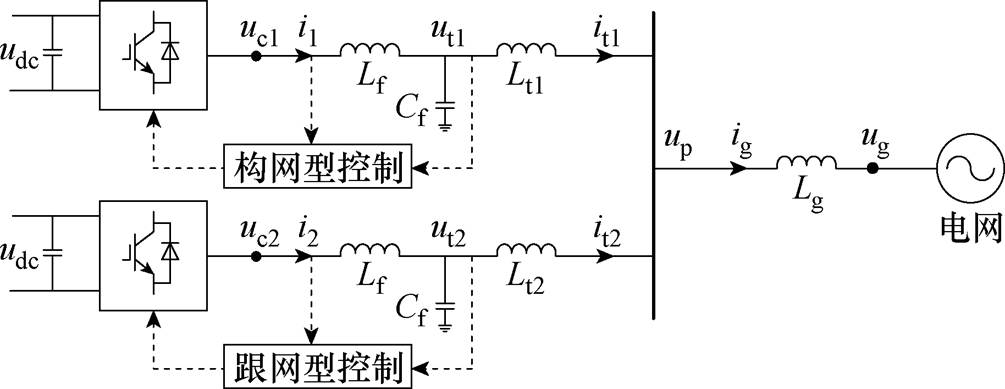
异构新能源并网系统主电路如图1所示。图中,uc1、ut1、i1分别为构网型换流器内电动势、端电压和输出电流;uc2、ut2、i2分别为跟网型换流器内电动势、端电压和输出电流;it1、it2为输电线路电流;up为并网点电压;ug、ig分别为电网电压、电流;Lf、Cf分别为滤波电感和滤波电容;Lt1、Lt2为换流器到并网点之间的输电线路电感;Lg为电网线路电感。
图1 异构新能源并网系统主电路
Fig.1 The main circuit of the grid-connected system of heterogeneous new energy sources
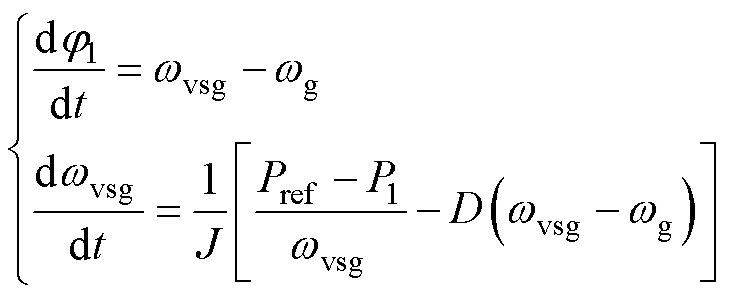
构网型控制结构由有功功率环、电压环和电流环组成[16],控制框图如图2所示。其中有功功率环采用虚拟同步机控制,模拟同步发电机的转子运动方程提高系统的惯量和阻尼水平,J为惯量系数,D为阻尼系数。电压环通过控制端电压d、q轴分量utd1、utq1为电流环提供参考值id1ref、iq1ref,电流环通过对换流器输出电流d、q轴分量id1、iq1进行控制得到逆变器内电动势ucd1、ucq1分量,经Park反变换控制逆变器输出,qvsg为有功功率环输出相位。
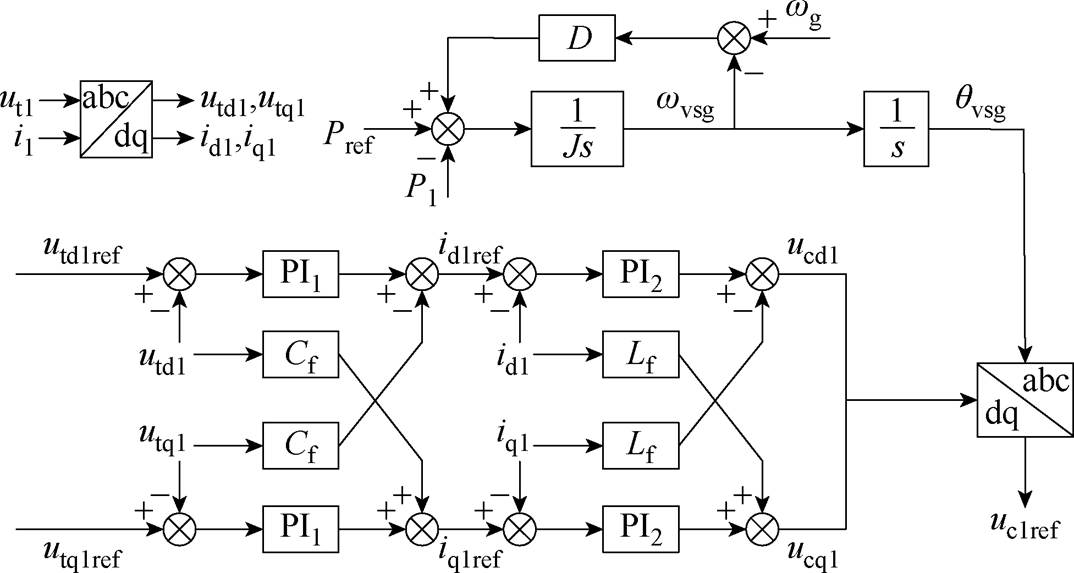
图2 构网型控制框图
Fig.2 Control block diagram of grid-forming converters
跟网型控制结构由锁相环和电流环组成,控制框图如图3所示。锁相环通过比例积分(Proportional Integral, PI)环节对端电压q轴分量utq2进行控制,输出相位qpll。电流环通过控制对id2、iq2分量得到ucd1、ucq1分量。由于直流母线电压控制器的控制带宽通常低于交流电流控制器,因此假定udc为常数,电流参考值id2ref、iq2ref为常数[14]。
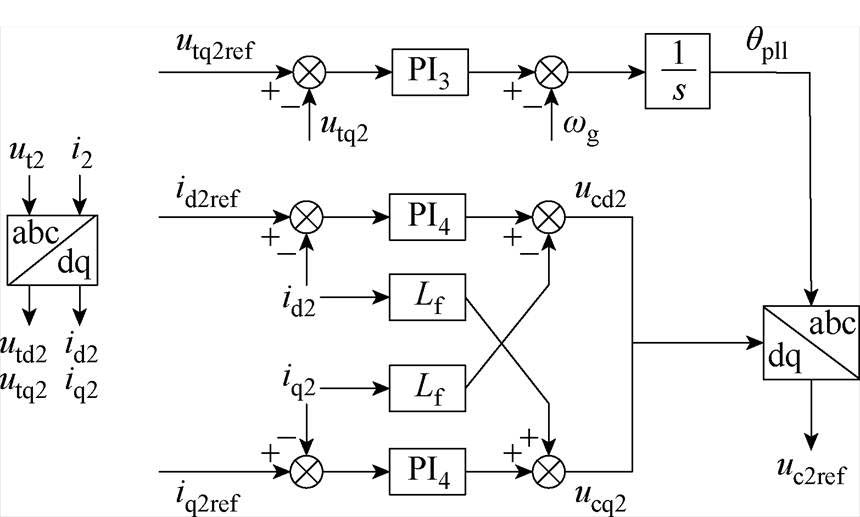
图3 跟网型控制框图
Fig.3 Control block diagram of grid-following converters
异构新能源并网系统主电路及控制结构坐标系关系如图4所示。abc为三相静止坐标系。d1q1、d2q2分别是以wvsg和wpll为角速度旋转的坐标系,旋转角度分别为qvsg和qpll。xy为同步速旋转参考坐标系,转速为wg,与d1q1、d2q2两旋转坐标系夹角分别为j1、j2。Ut1为构网型换流器端电压合成矢量,Ut2为跟网型换流器端电压合成矢量,Ug为电网电压合成矢量。
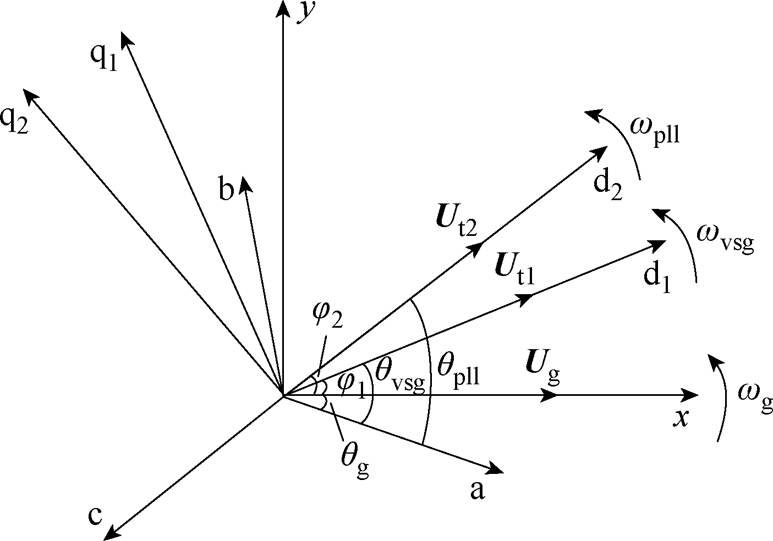
图4 主电路及控制结构坐标系关系
Fig.4 Relationship of the coordinate systems for the main circuit and control structure
根据图2构网型控制框图以及图4各坐标系关系可以得出构网型控制状态空间模型如下。
1)有功功率环模型
 (1)
(1)
 (2)
(2)
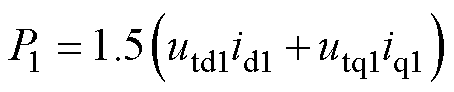
式中,P1为构网型换流器输出有功功率。
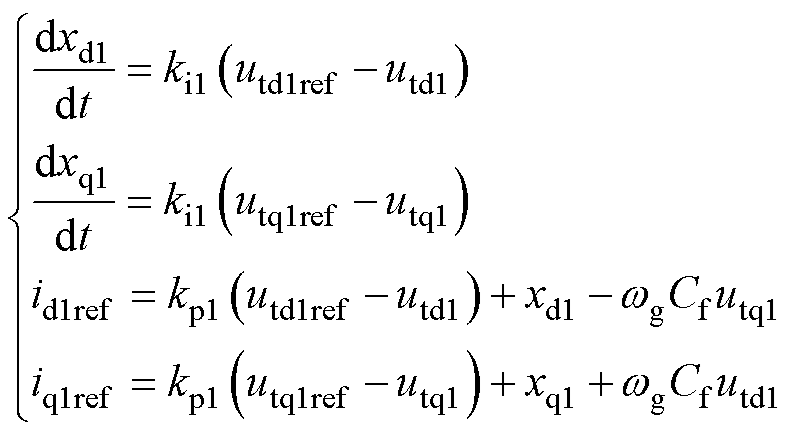
2)电压控制环模型
为了便于状态变量选取,令PI1的积分器输出分别为xd1和xq1,可得电压控制环数学模型为
 (3)
(3)
式中,kp1和ki1分别为PI1控制器的比例和积分系数;utd1ref为端电压的d轴参考值,其值为端电压ut1的幅值;utq1ref为端电压的q轴参考值,其值为0[2]。
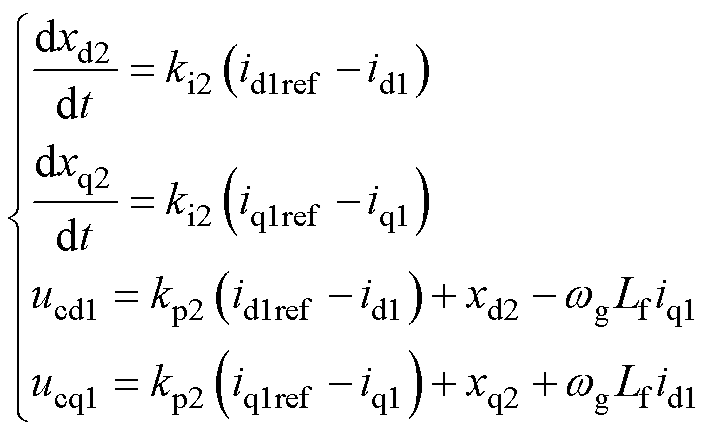
3)电流控制环模型
同理,令PI2的积分器输出分别为xd2和xq2,可得电流控制环数学模型为
 (4)
(4)
式中,kp2和ki2分别为PI2控制器的比例和积分系数。
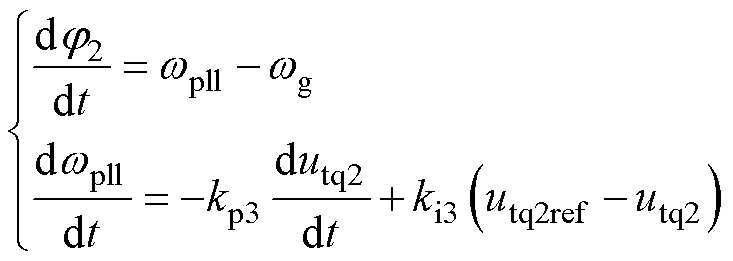
根据图3跟网型控制框图以及图4各坐标系关系可以得出跟网型控制状态空间模型。
1)锁相环模型
 (5)
(5)
式中,kp3和ki3分别为PI3控制器的比例和积分系数;utq2ref为端电压的q轴参考值,其值为0。
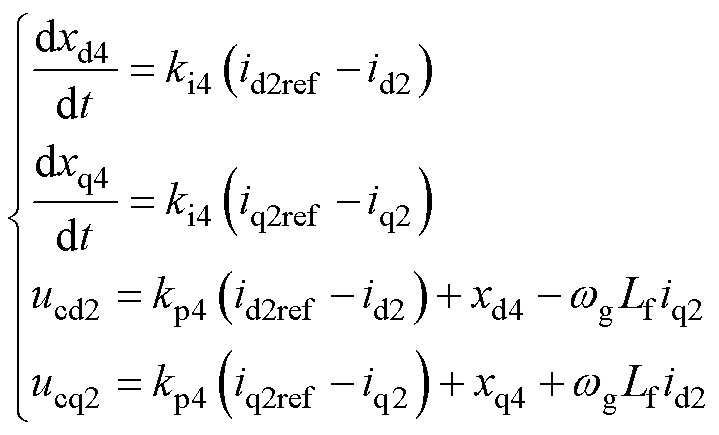
2)电流环模型
令PI4的积分器输出分别为xd4和xq4,可得电流环数学模型为
 (6)
(6)
式中,kp4和ki4分别为PI4控制器的比例和积分系数;id2ref为输出电流d轴参考值,其值为输出电流i2的幅值;iq2ref为输出电流的q轴参考值,其值为0。
1)构网型控制输电线路模型
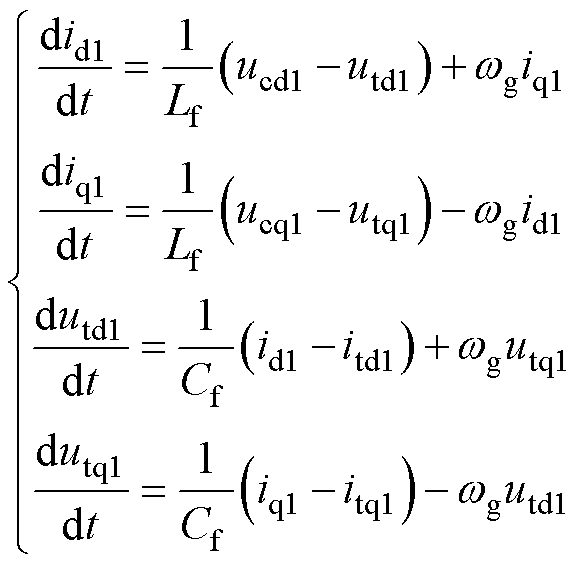 (7)
(7)
2)跟网型控制输电线路模型
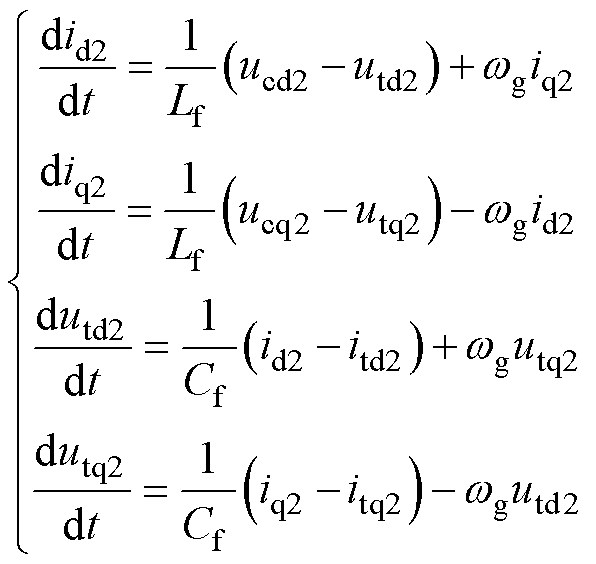 (8)
(8)
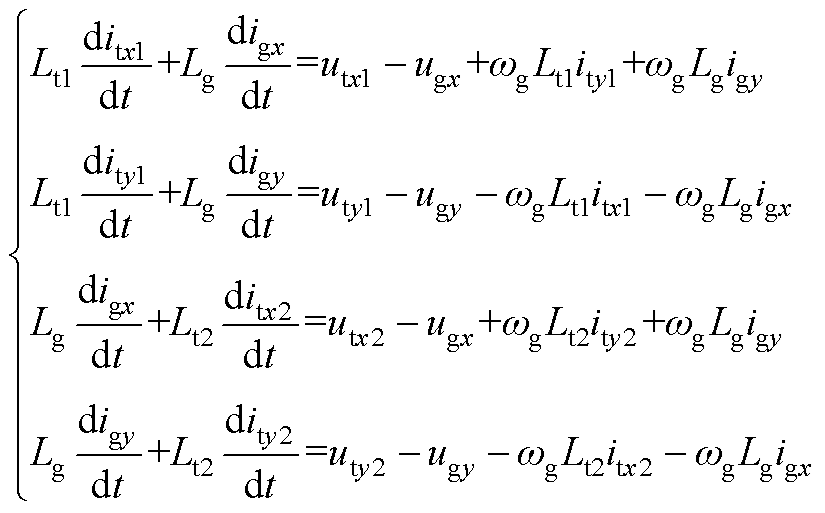
3)构网型和跟网型换流器互联线路模型
构网型换流器和跟网型换流器至并网点间输电电路模型如下,推导过程见附录第1节。
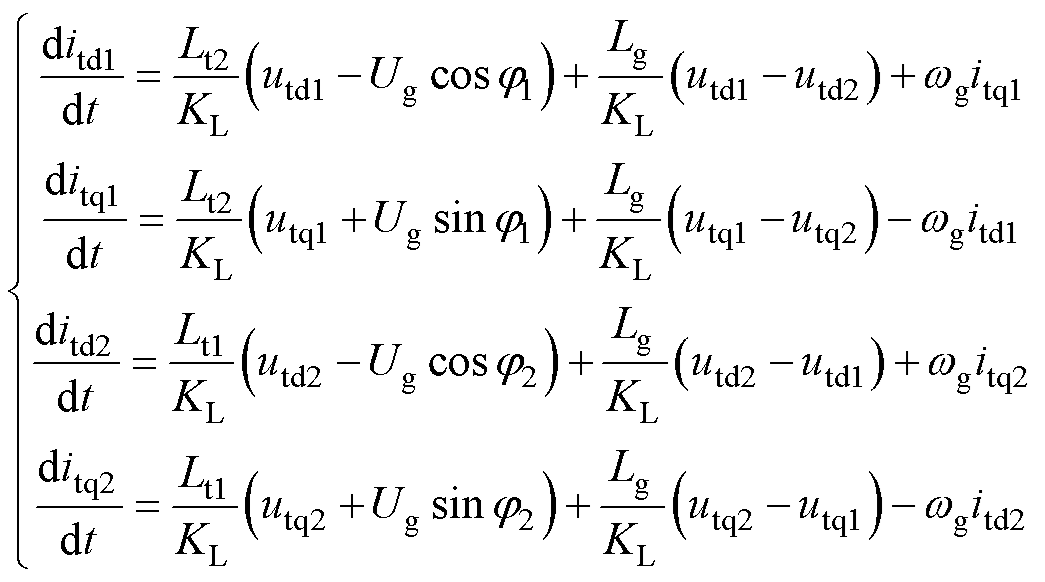 (9)
(9)
其中
 (10)
(10)
综上所述,结合式(1)~式(10)可得到异构新能源并网系统的22阶状态空间模型,各参数初始值见附录第2节。
当非线性动力系统中某参数发生连续变化时,该系统的形态(如平衡点的数目、稳定性、轨道的拓扑结构)发生变化,流形发生切换型突变,这种现象定义为分岔[17]。分岔理论是本文研究的核心理论基础,用于分析系统参数变化的非线性动力学行为,确认分岔点和分岔类型。本节将从单参数分岔特性和双参数分岔特性两个角度出发,揭示系统从稳定状态到出现振荡、失稳的转变过程。并且通过平衡点流形追踪搜索分岔点,基于Poincaré截面绘制分岔图、相平面轨迹图,以直观的图形方式观察系统状态的变化以及状态变量之间的关系,展示系统在不同参数下的运行状态。以下结果均使用Matlab中的MATCONT工具进行数值计算。
2.1.1 以构网型PI控制器系数为分岔参数
PI控制是一种常见的控制策略,通过调整PI参数,可以控制系统的动态响应速度和稳态误差,从而提高系统的稳定性。PI参数的选择应根据系统的具体需求和特性来确定,设置过大或过小都有可能使系统发生振荡。
保持系统其他参数不变,图5分别给出了构网型控制电压环中的积分系数ki1和比例系数kp1变化时的分岔图。如图5所示,随着ki1系数的增大或者kp1系数的减小,系统分别会在ki1=4 251和kp1=0.437处发生超临界Hopf分岔(Hopf Bifurcation, HB),稳定工作点消失,出现一个新的稳定极限环。极限环是一个孤立的周期闭合轨迹,若轨迹向其螺旋靠近则为稳定极限环,若螺旋远离则为不稳定极限环。Poincaré截面设置为wvsg=314.16 rad/s,可得到j1的两个孤立对称点,一个是最大值,另一个是最小值。随着ki1和kp1系数的继续变化,极限环的幅值也随之增大,最终在ki1=4 272和kp1=0.281处发生Neimark- Sacker分岔(NSB),此时系统由一个极限环变为多个环面,Poincaré截面也由两个点变为数个点。
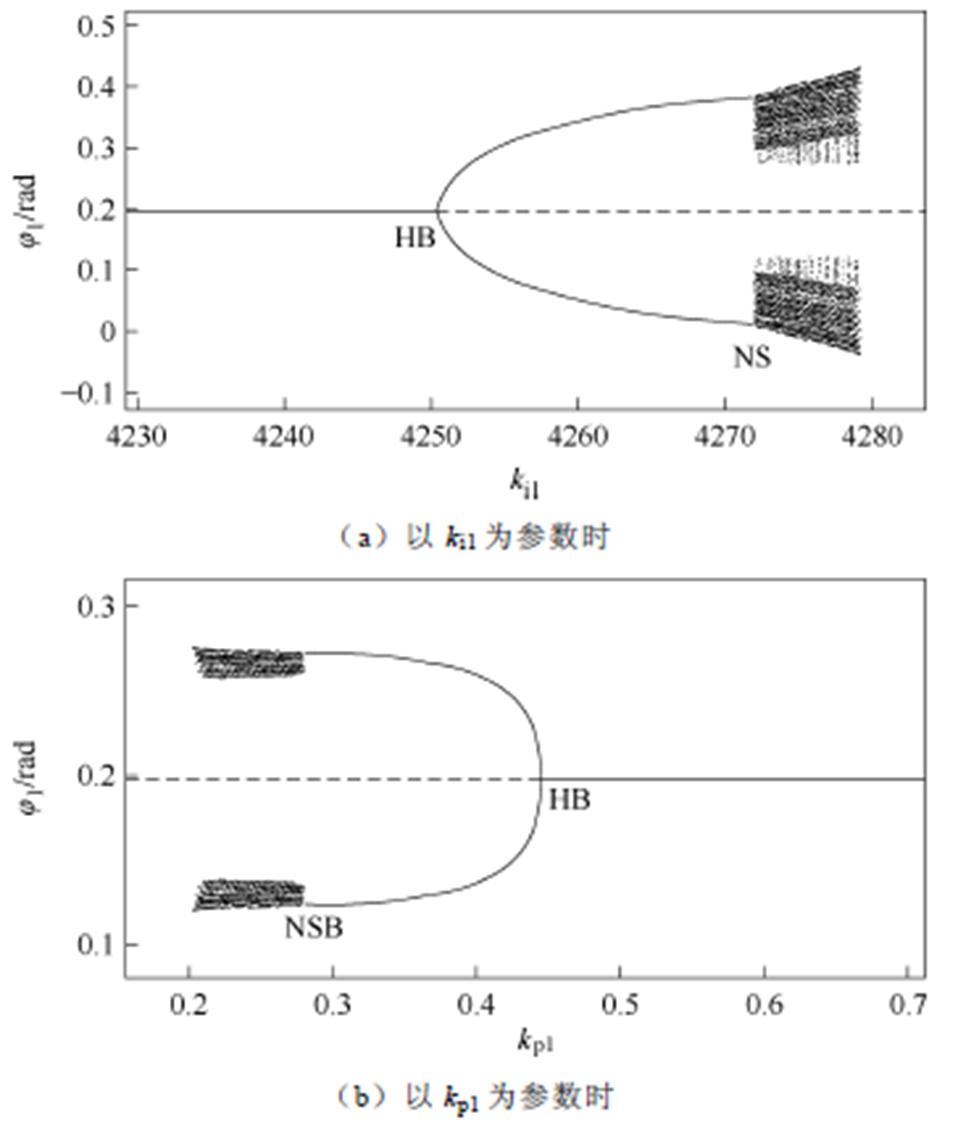
图5 构网型PI1控制器系数引起的分岔
Fig.5 Bifurcation caused by the coefficients of the PI1 controller in grid-forming converters
为了使分岔过程更加直观,分别在ki1和kp1系数发生分岔后取值,观察其相平面轨迹如附图1所示。附图1a和附图1b为系统发生Hopf分岔后的相平面图,系统此时产生稳定的周期闭合轨迹,即稳定的极限环。附图1c和附图1d为系统发生Neimark- Sacker分岔后的相平面图,此时轨迹并没有闭合,而是沿周期轨道产生多个环面,此时系统变得极其不稳定。
电流环中积分系数ki2和比例系数kp2的分岔特性与电压环中的PI1系数相似,随着ki2系数的增大和kp2系数的减小,系统先后发生超临界Hopf分岔和Neimark-Sacker分岔,系统由稳定的工作点转为不稳定,产生稳定的极限环;继续改变参数,单一极限环变为多个不稳定的环面。
2.1.2 以跟网型PI3控制器系数为分岔参数
保持系统其他参数不变,图6分别给出了跟网型锁相环中的积分系数ki3和比例系数kp3变化时的分岔图。如图6可知,随着ki3系数的增大,系统在ki3=6 061处发生超临界Hopf分岔,产生稳定极限环。继续增大ki3会发现,由超临界Hopf分岔形成的稳定极限环(黑色实线)与一个一直存在的不稳定极限环(红色虚线)在ki3=6 115处发生碰撞消失,发生环鞍-结分岔(Loop Saddle-Node Bifurcation, LSNB)。常规的鞍-结分岔为一个稳定结点与一个不稳定的鞍点随着参数变化相互移动,并且发生碰撞消失。然而,一个稳定的极限环和一个不稳定极限环随着参数变化也会出现碰撞消失的现象,就是环鞍-结分岔。随着kp3系数的增大,系统在kp3=93处发生超临界Hopf分岔,产生稳定极限环。继续增大kp3,系统会发生倍周期分岔(Period Doubling Bifurcation, PDB),极限环周期开始出现倍增直至陷入混沌状态。
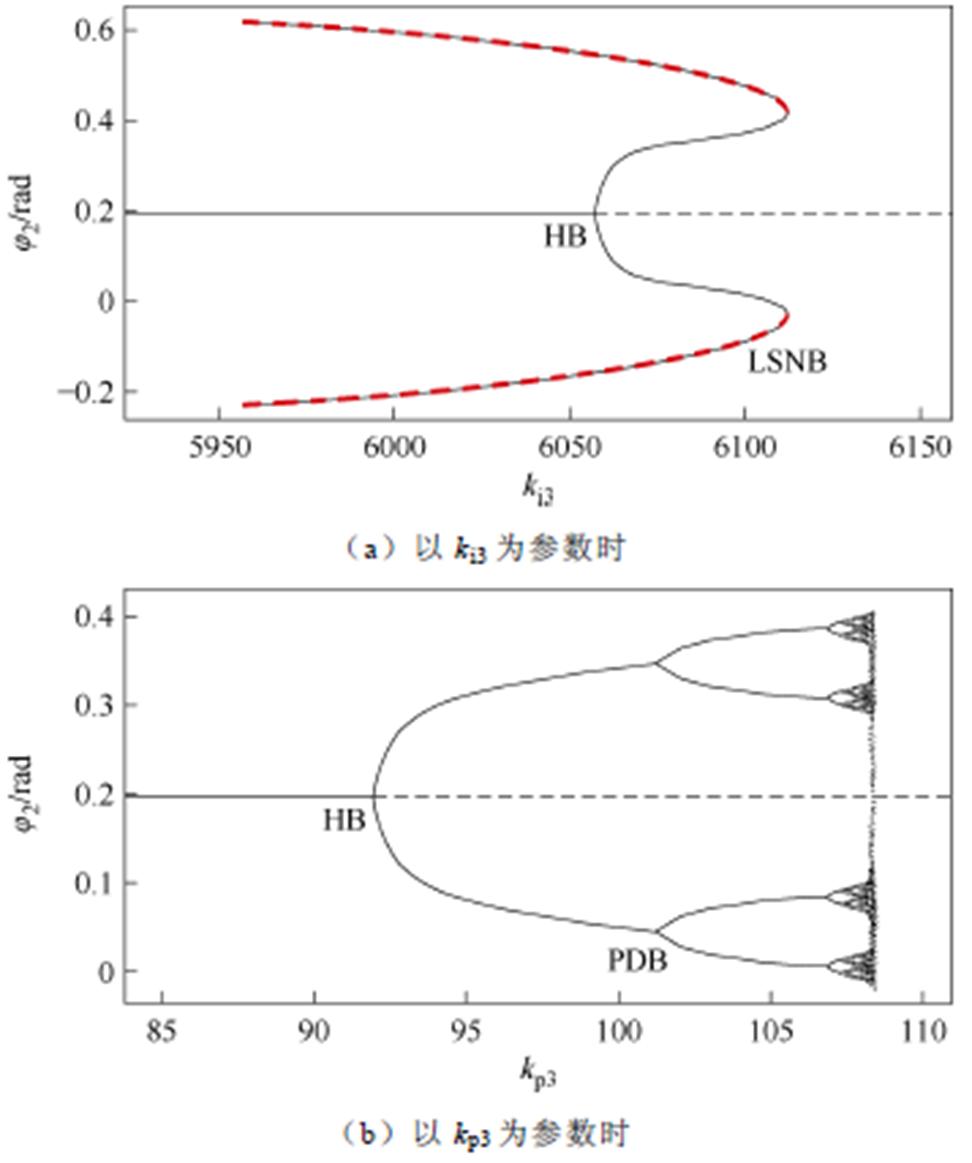
图6 跟网型PI3控制器系数引起的分岔
Fig.6 Bifurcation caused by the coefficients of the PI3 controller in grid-following converters
为了便于了解以上两种分岔过程,分别在环鞍-结分岔点前以及倍周期分岔点后取参数值,观察其相平面轨迹,ki3、kp3参数分岔后的相平面轨迹如附图2所示。通过对比附图2a和附图2b可以看出,当ki3参数值逐渐接近环鞍-结分岔点时,稳定极限环和不稳定极限环在相互靠近。对比附图2c和附图2d可以看出,在发生倍周期分岔后,随着kp3参数值的增大,极限环周期成倍增加。
2.1.3 以跟网型PI4控制器系数为分岔参数
保持其他参数不变,图7给出了跟网型电流环中的积分系数ki4和比例系数kp4变化时的分岔图。分岔特性与图6中PI3控制器系数相似,但分岔方向恰好相反。随着ki4和kp4系数的减小,两参数均会发生超临界Hopf分岔。继续减小ki4系数,稳定极限环和不稳定极限环在ki4=52处碰撞消失,发生环鞍-结分岔。继续减小kp4系数,在kp4=0.101处稳定极限环开始倍增,发生倍周期分岔,直至进入混沌状态。
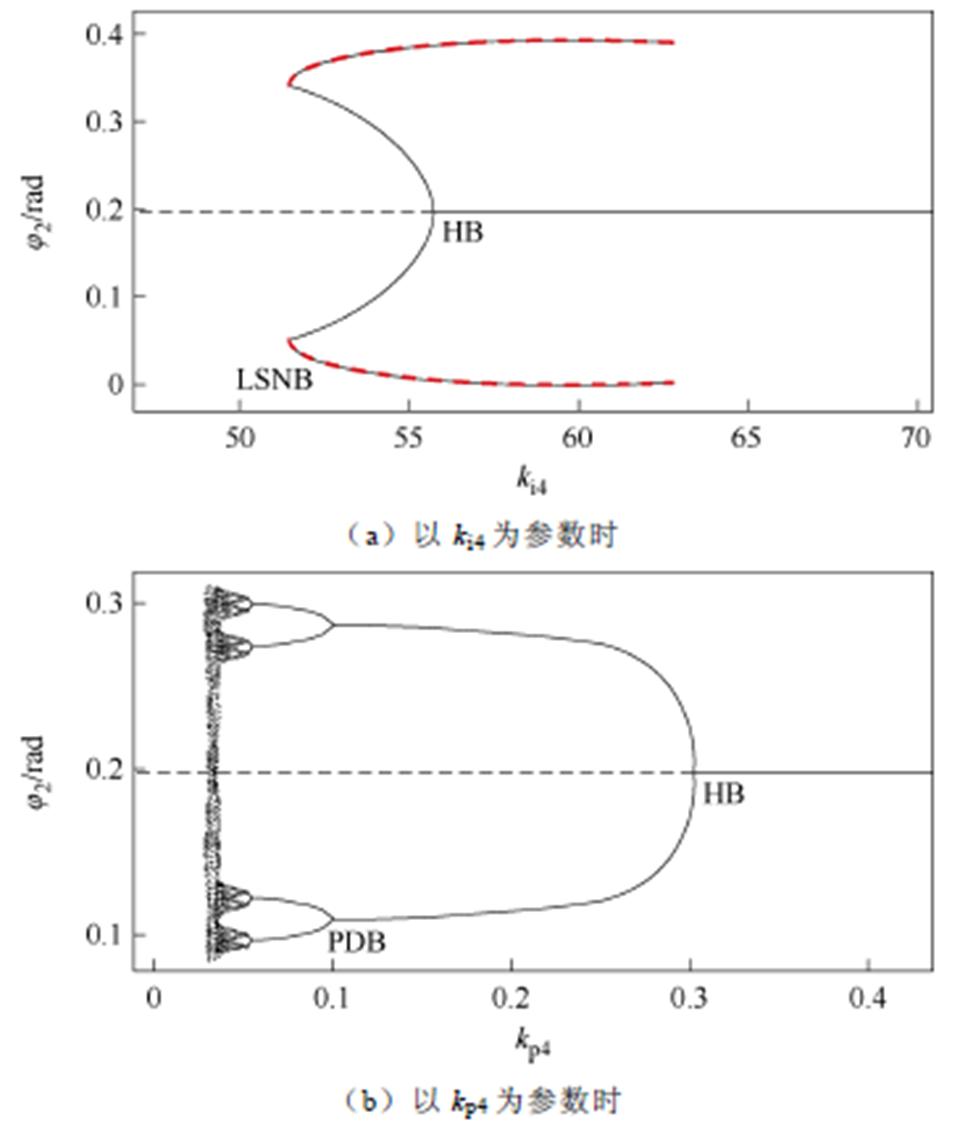
图7 跟网型PI4控制器系数引起的分岔
Fig.7 Bifurcation caused by the coefficients of the grid-following PI4 controller
2.1.4 以电网侧线路电感Lg为分岔参数
系统的电网强度通常用短路比(Short Circuit Ratio, SCR)来度量[16],其表达式为
 (11)
(11)
式中,Ub、Sb分别为并风点额定电压和额定功率;Zg为线路阻抗。
由式(11)可知,分析线路电感Lg的分岔特性有利于了解异构新能源并网系统在强电网和弱电网下的非线性动力学特性。系统其他参数取初始值,图8给出了线路电感Lg变化时的分岔图。随着Lg不断增大,在Lg=18.63 mH时发生亚临界Hopf分岔,不稳定极限环(红色虚线)消失,稳定平衡点(黑色实线)变为不稳定。超临界Hopf分岔和亚临界Hopf分岔的详细区别见附录第4节。继续增大Lg,两个不稳定的平衡点相互靠近,最终在Lg=21 mH时碰撞消失发生广义鞍-结分岔(Generalized Saddle- Node Bifurcation, GSNB),在分岔点右侧无平衡点。
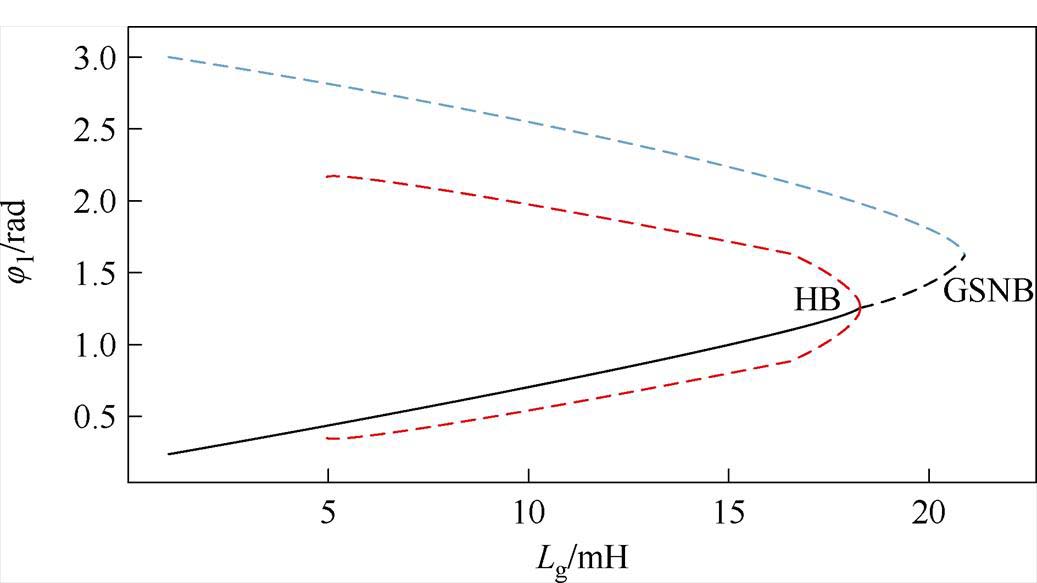
图8 Lg参数引起的分岔
Fig.8 Bifurcation caused by the Lg parameter
PI控制器在实际调节的过程中比例系数和积分系数并不会单一发生变化,而是协同调节。所以在调节PI参数时,应避免比例增益和积分增益之间的冲突。如果两者之间存在冲突,可能会导致系统性能下降甚至无法稳定运行。下面将对系统各控制器中的双参数进行分岔特性分析。
2.2.1 构网型控制中PI1控制器双参数分岔分析
保持其他参数不变,图9为构网型控制中的PI1控制器比例系数和积分系数均发生变化时的分岔图。由图9可知,系统发生了双Hopf分岔(Hopf-Hopf Bifurcation, HHB)。双Hopf分岔是在具有两参数的常微分方程中出现的分岔,参数平面中的分岔点位于Hopf分岔的两条曲线的横向交点处。通常Neimark- Sacker分岔的两个分支从双Hopf分岔点发出,在不同的系统中近似的参数值也会发生其他分岔。双Hopf分岔的出现会导致系统中出现非均匀的周期振荡,可能会产生三维不变环面,在每个环面上,系统的运动具有准周期的特性,即系统的状态在环面上不断变化,但始终保持在环面上。
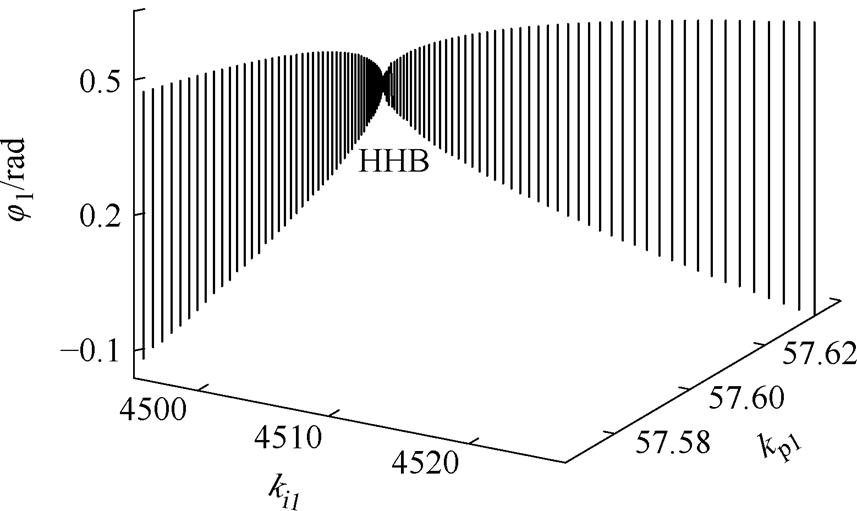
图9 PI1控制器双参数分岔图
Fig.9 Bifurcation diagram of double parameters of the PI1 controller
2.2.2 跟网型控制中PI3和PI4控制器双参数分岔分析
图10为跟网型控制中的PI3和PI4控制器双参数同时发生变化时的分岔图。由图10可知,系统发生了广义Hopf分岔(Generalized Hopf Bifurcation, GHB)。广义Hopf分岔也是在具有两参数的常微分方程中出现的分岔,分岔点将参数平面中的亚临界和超临界Hopf分岔分开。对于广义Hopf分岔点附近的参数值,系统均会产生极限环,它们通过周期性轨道的环鞍-结分岔碰撞消失。
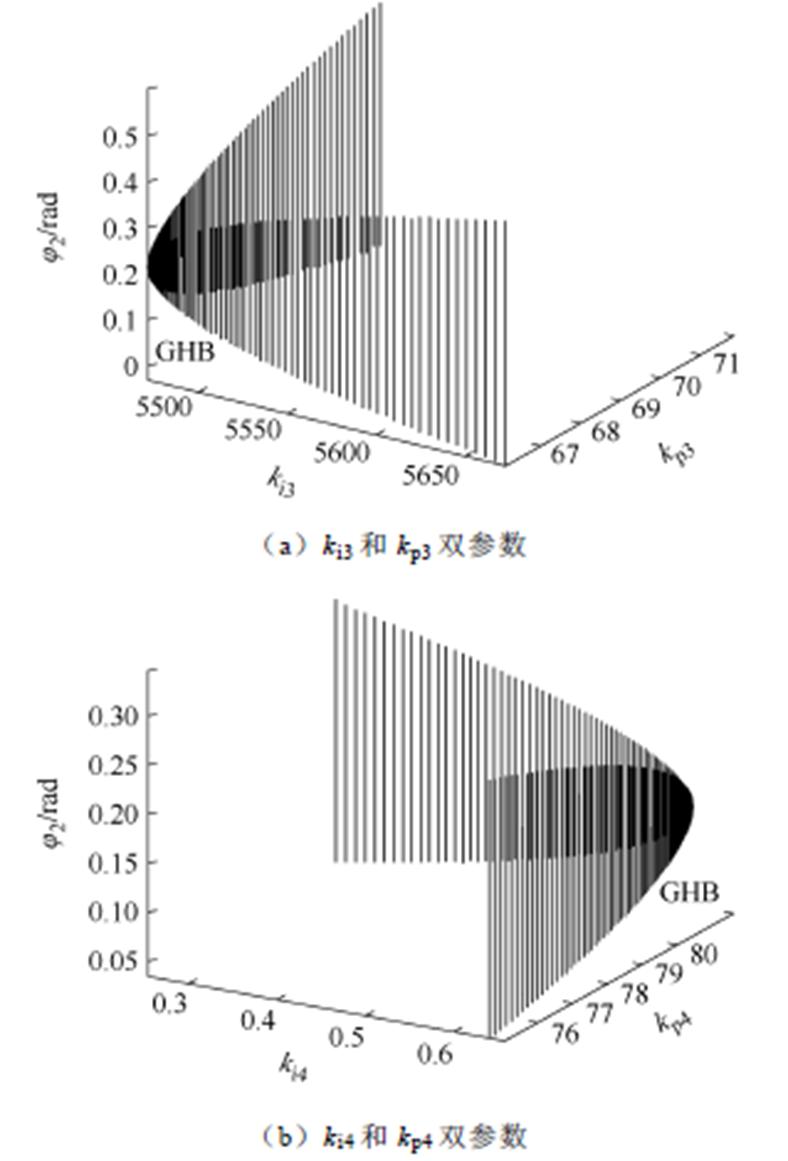
图10 PI3和PI4控制器双参数分岔图
Fig.10 Bifurcation diagram of double parameters of the PI3 and PI4 controllers
基于上述观察和分析可知,对于PI控制器参数,稳定工作点通过超临界Hopf分岔失去稳定性,在平衡点不稳定后出现新的稳定极限环,这意味着持续振荡的发生。关于远离超临界Hopf分岔点的行为,对于构网型换流器比例系数kp1、kp2和积分系数ki1、ki2,系统会出现Neimark-Sacker分岔。对于跟网型换流器积分系数ki3和ki4,系统会出现环鞍-结分岔。对于跟网型换流器比例系数kp3和kp4,系统会出现倍周期分岔。而PI控制器中的比例系数和积分系数双参数变化会导致系统发生广义Hopf分岔和双Hopf分岔。对于Lg参数,系统在不稳定后立即发散,出现亚临界Hopf分岔,不稳定极限环和稳定工作点消失。分岔后可能跳变到其他稳定极限环出现持续振荡,也可能没有其他稳定吸引子,导致系统迅速发散,直接失稳。
借助这种非线性分岔分析,能够求解出系统中的关键参数,这些关键参数对于识别系统的薄弱节点及有效预防系统振荡具有重要意义。并且基于分岔理论的分析不仅得到了系统的稳定性信息,还获得了整个参数空间内系统动力学更全面的全局图像,有助于全面了解风电系统的运行状态和潜在风险,这是线性模型分析所缺乏的。在获得所有这些有用的信息后,可以得到不同参数的合理取值区域。
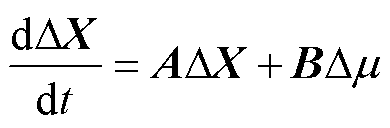
为了防控振荡失稳现象的发生,在系统参数设计的过程中,明确系统的参数稳定域边界极为关键[18]。通过对系统单参数的分岔特性分析可知,设置较小的ki1、ki3、kp3参数和较大的ki2、ki4、kp4参数有利于系统稳定运行。并且结合系统的双参数分岔点特性,可以得出PI1、PI3和PI4三个控制器的二维平面参数稳定区域,如图11所示。
虽然结果基于其他参数取初始值,但稳定域趋势仍具有普遍性,明确了系统稳定运行参数范围,为实际系统参数设计提供参考,避免系统进入混沌状态。
为进一步分析各参数在稳定域边界及不稳定区域内各分岔点引起的振荡失稳特征,明确特征根变化与各分岔类型以及振荡失稳之间的关系,现对各分岔点附近进行特征根分析。结合式(1)~式(10)将异构新能源非线性系统线性化,可得小信号模型为
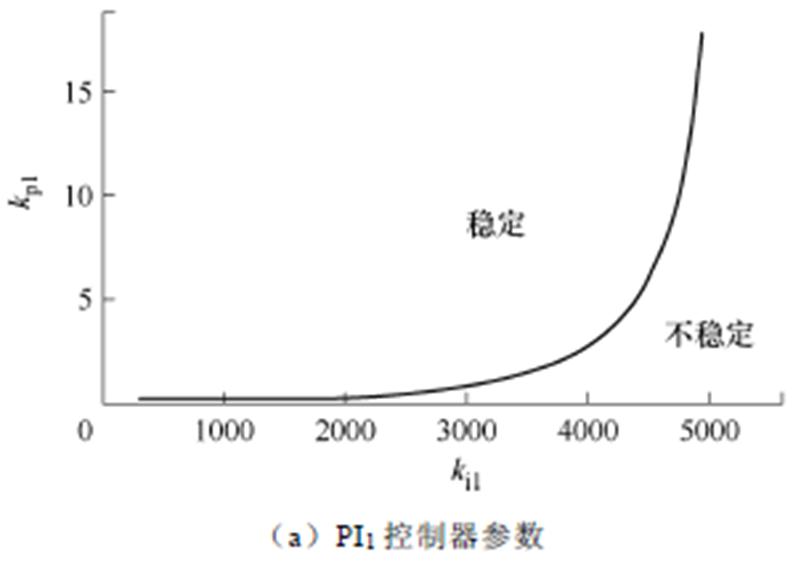
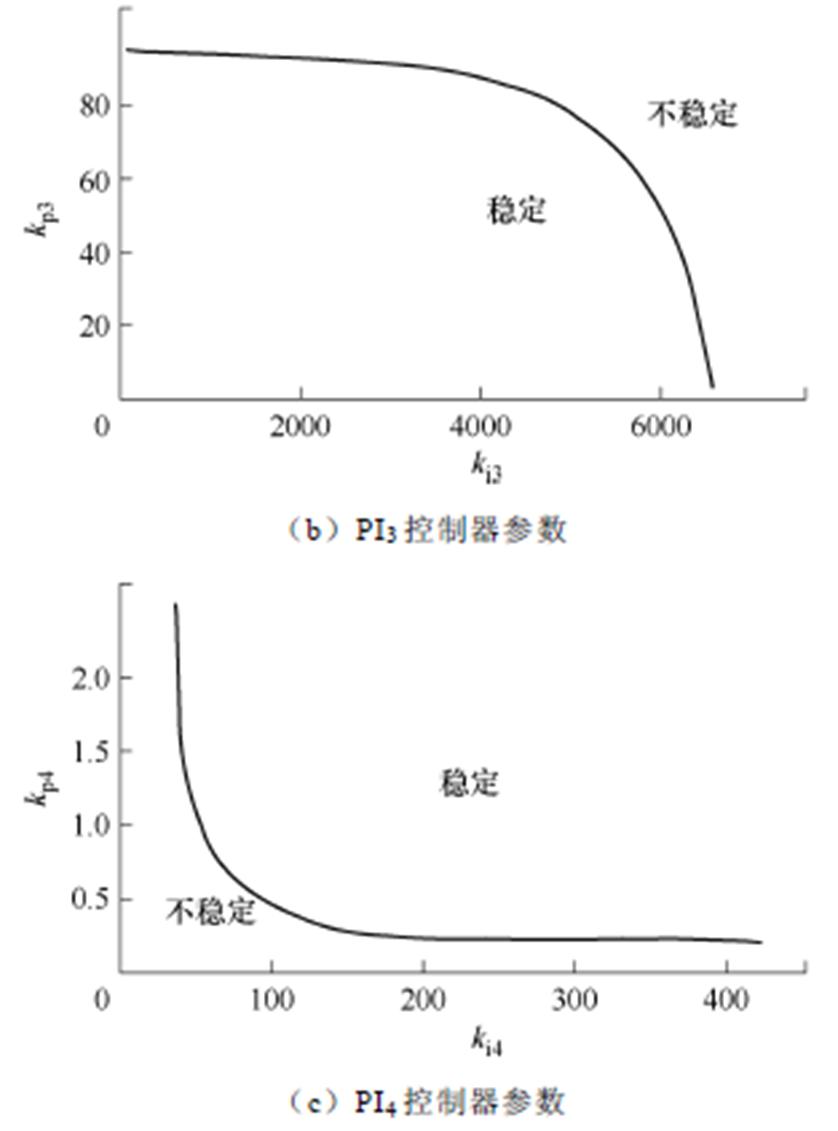
图11 控制器参数稳定域
Fig.11 Stability region of controller parameters
 (12)
(12)
式中,DX为线性化后的状态变量;Dm为线性化后的输入变量;A为状态矩阵;B为输入矩阵。其中,A矩阵各元素为
 (13)
(13)
式中,fi为第i个状态空间方程;xj为第j个状态变量。
保持系统其他参数不变,通过设置构网型控制器PI1和PI2中的积分系数ki1、ki2和比例系数kp1、kp2至参数稳定域边界,观察特征根轨迹可以发现:当参数变化至超临界Hopf分岔点时,会有一对共轭特征根实部由负数变为0,系统发生振荡失稳,纯虚数共轭特征根值及振荡频率见附表3,系统状态表现为次同步振荡。继续改变参数,特征根实部变为正数,虚部不变。当参数改变至Neimark-Sacker分岔点附近,系统会出现多对共轭特征根穿过虚轴。
继续设置跟网型控制PI3和PI4控制器中的积分系数ki3、ki4和比例系数kp3、kp4至参数稳定域边界,观察特征根轨迹可以发现:当参数变化至超临界Hopf分岔时,仍为一对共轭复根穿过虚轴,特征根值及对应振荡频率见附表3,表现为次同步振荡。但当设置积分系数ki3、ki4至环鞍-结分岔点时,在原有的一对正实部特征根基础上会出现一个零特征根,导致系统失稳现象加剧。当设置比例系数kp3、kp4至倍周期分岔点时,在原有的一对正实部特征根基础上会出现一对新的正实部特征根。再次发生倍周期分岔时,又会出现新的特征根实部由负变正。
保持其他参数不变,改变线路电感Lg参数至亚临界Hopf分岔点,系统产生一对纯虚数特征根±j7,对应振荡频率为1.12 Hz,表现为低频振荡。但对于亚临界Hopf分岔,分岔点后的系统状态是不确定的,可能继续保持低频振荡状态,也可能跃变到其他稳定极限环发生中高频振荡甚至更严重的失稳现象。
为进一步验证本文数值计算和理论分析的正确性,本节通过Matlab/Simulink平台对异构新能源并网系统进行仿真分析,拓扑结构如图1所示,参数设置见附录第2节。基于第2节数值分析结果,以构网型控制环节积分系数ki1为调整变量,逐渐增大参数数值,观察系统在分岔前、分岔时以及分岔后的动态行为。
首先设置参数ki1=4 200,图12为构网型控制换流器并网电流it1的时域波形,以及快速傅里叶变换(Fast Fourier Transform, FFT)分析结果。观察图形可知,系统此时处于稳定状态,说明还未出现分岔行为。
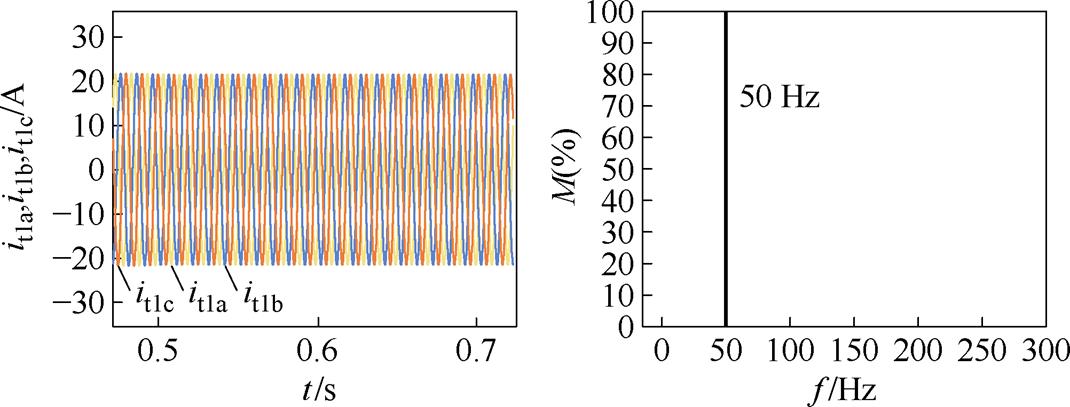
图12 ki1=4 200时的时域图及FFT结果
Fig.12 Time-domain diagram and FFT results when ki1=4 200
继续改变参数,当ki1=4 251时系统出现振荡失稳现象,此时发生超临界Hopf分岔。构网型控制换流器输出电流dq轴分量idq1和三相并网电流it1的时域波形如图13a和图13b所示,图13c和图13d为对应的FFT分析结果。观察图形可知,换流器输出电流id1和iq1发生了振荡失稳,波形近似为正弦波,振荡频率为13 Hz,与理论分析结果相同。由于该振荡是由工作点的线性不稳定性产生的,本文将其称为模态频率,记为fdq。三相并网电流it1abc的时域波形呈现某种调制形式,FFT分析结果有三个明显的峰值,分别为基频50 Hz(f1)、63 Hz(f1+fdq)、37 Hz(f1-fdq)。频率f1+fdq和f1-fdq是镜像对称的,称为边带频率,在图13d中还存在76 Hz(f1+2fdq)、24 Hz(f1-2fdq)等次边带频率。这些都是由次同步频率与基频相互作用产生的,但主导的振荡仍是次同步频率本身。
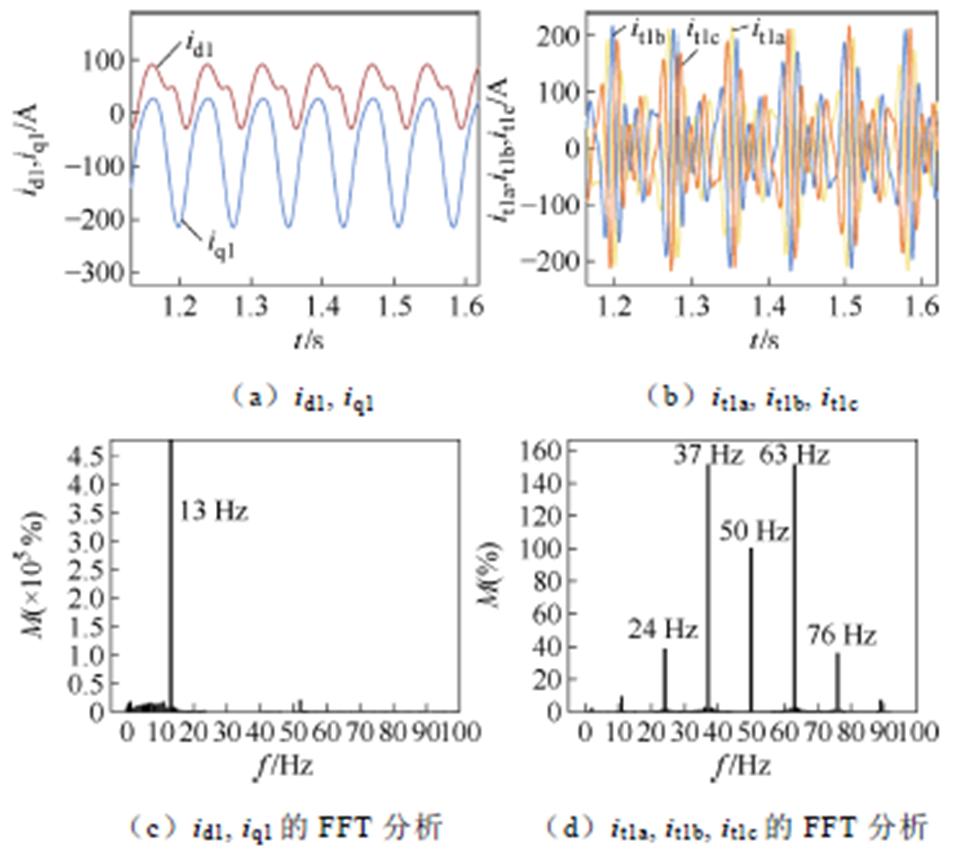
图13 ki1=4 251时的时域图及FFT结果
Fig.13 Time-domain diagram and FFT results when ki1=4 251
继续增大参数,图14为ki1=4 272时发生Neimark- Sacker分岔的时域波形以及FFT分析结果。通过对比可以发现,当参数逐渐远离分岔点时波形会出现轻微变化,FFT分析结果除了原有的主导振荡频率外又出现了两种模态频率,同时也产生了多个边带频率。与第2节理论分析结论相符,系统此时由一个极限环变为多个环面,多对共轭特征根穿过虚轴。
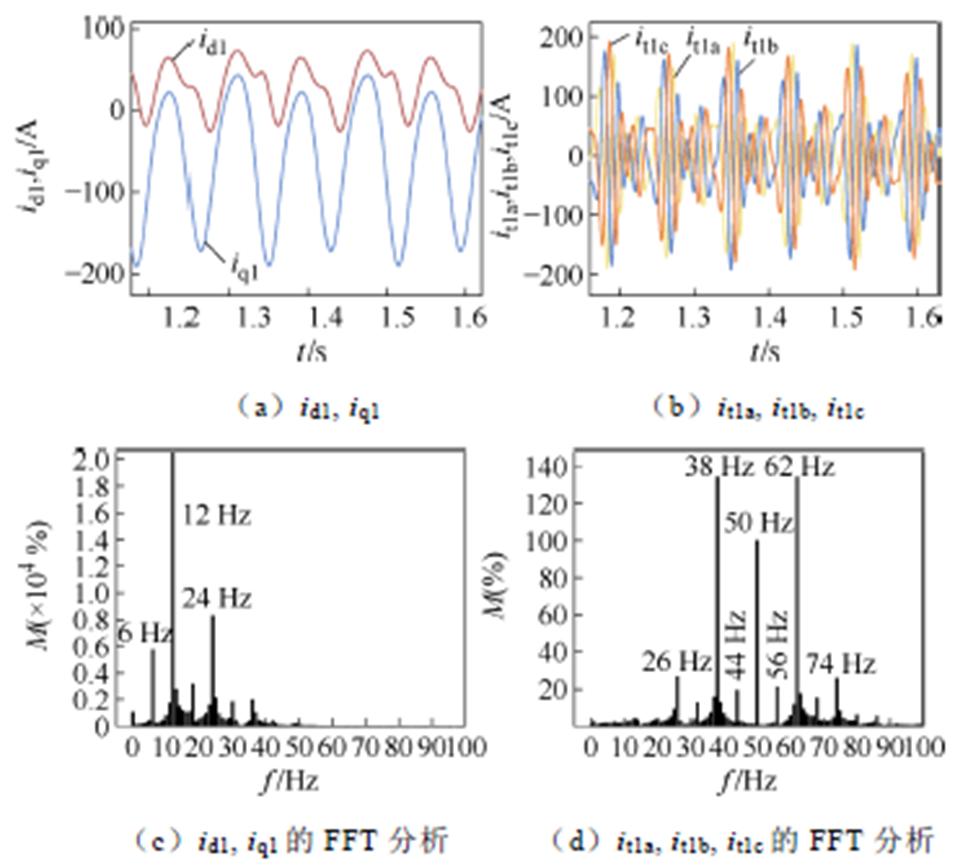
图14 ki1=4 272时的时域图及FFT结果
Fig.14 Time-domain diagram and FFT results when ki1=4 272
继续增大参数至远离Neimark-Sacker分岔点,图15为ki1=4 285时的输出电流时域波形,通过观察可以得知系统此时处于极其不稳定的状态。为了进一步验证分岔行为的可逆性,逐渐减小参数ki1的值,系统从振荡失稳状态逐渐恢复稳定。可以得出结论,系统在参数逆向变化时分岔行为仍与理论分析一致。
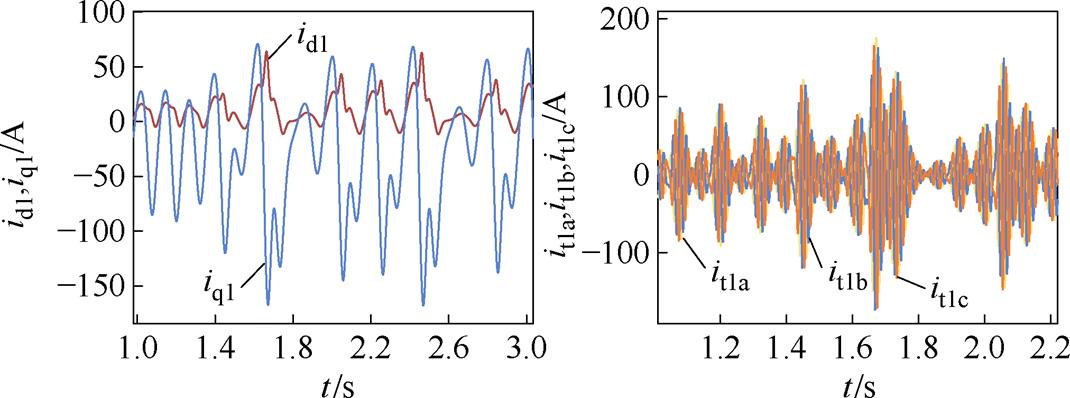
图15 ki1=4 285时的时域图
Fig.15 Time-domain diagram when ki1=4 285
本小节以构网型控制环节积分系数ki1为调整对象,通过不断增大参数值至分岔点前后,对系统进行仿真分析。观察电流时域波形和FFT分析图可知,仿真结论与分岔理论分析以及特征根分析得到的失稳模式及振荡频率相对应,验证了理论分析的正确性。同时,按照此类方法对其他关键参数(kp1、ki2、kp2、ki3、kp3、ki4、kp4、Lg等)的分岔行为进行逐一验证,仿真结果与理论分析结论均一致。
本文从分岔理论角度出发,以异构新能源并网系统为研究对象,建立22阶非线性状态空间方程,对其进行数值计算、理论分析以及仿真验证,得出以下结论:
1)构网型和跟网型换流器中的PI控制系数单参数发生变化时均会产生一个稳定的极限环,发生超临界Hopf分岔。进一步分析超临界Hopf分岔后的动力学行为,会发生Neimark-Sacker分岔、环鞍-结分岔和倍周期分岔等更为复杂的分岔类型。而PI控制器中的比例系数和积分系数双参数变化会导致系统发生广义Hopf分岔和双Hopf分岔。线路电感Lg单参数变化会发生亚临界Hopf分岔,继续增大参数可能会发生广义鞍-结分岔。
2)根据单/双参数分岔特性分析,可以构建系统二维平面双参数稳定域,虽然建立在其他参数取初始值情况下,但稳定域的取值趋势仍具有普遍性,在稳定区域内取参数值能有效避免系统进入混沌状态。
3)通过对由PI控制系数和线路电感Lg参数改变所引起的Hopf分岔点前后进行特征根分析,可以发现均会有一对共轭特征根实部由负数变为正数,导致系统发生持续振荡失稳。进一步对Neimark- Sacker分岔点、环鞍-结分岔点以及倍周期分岔点进行特征值分析,系统会有多对共轭复根实部由负转正,并且还会出现零特征根。
综上所述,本文通过分岔理论、Poincaré截面、相平面图、特征根分析等方法,对异构新能源并网系统中的各参数进行研究,了解了不同参数从稳态、失稳临界点到失稳后的全部动力学过程,加深了对振荡失稳特征的理解。
附 录
1. 输电线路模型推导
由图4可知,三条输电线路位于不同旋转坐标系,为了便于计算,将d1q1、d2q2两坐标系分量转换到xy坐标系,变换公式为
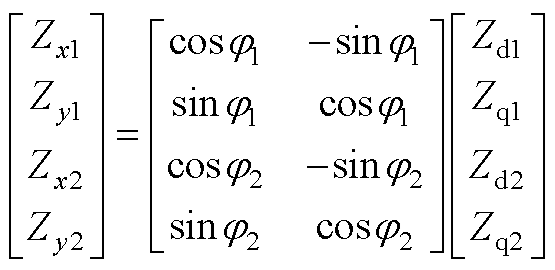 (A1)
(A1)
式中,Z表示需进行坐标变换的状态变量(代指各点处的电压电流量)。
运用式(A1)对两坐标系分量进行转换可建立线路电感Lt1、Lt2模型为
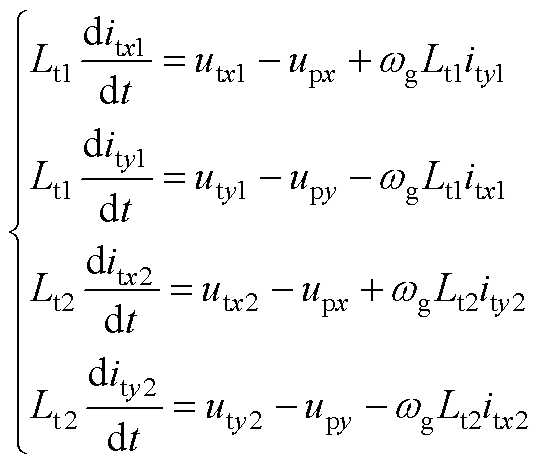 (A2)
(A2)
对电网侧线路电感Lg建立模型为
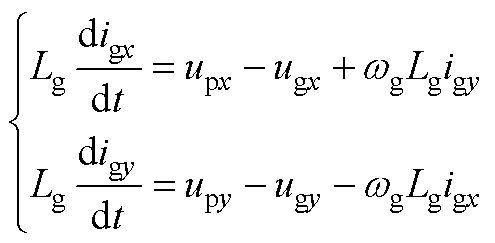 (A3)
(A3)
其中
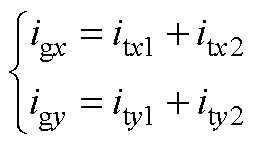 (A4)
(A4)
将式(A3)代入式(A2)中,消除up分量可得
 (A5)
(A5)
将式(A4)代入式(A5)中,对四个公式进行简化,并将所有xy轴变量进行坐标系反变换即可得到式(9)。
2. 异构新能源并网系统初始参数
异构新能源并网系统主电路及控制结构初始参数见附表1、附表2。
附表1 主电路参数
App.Tab.1 Main line parameters
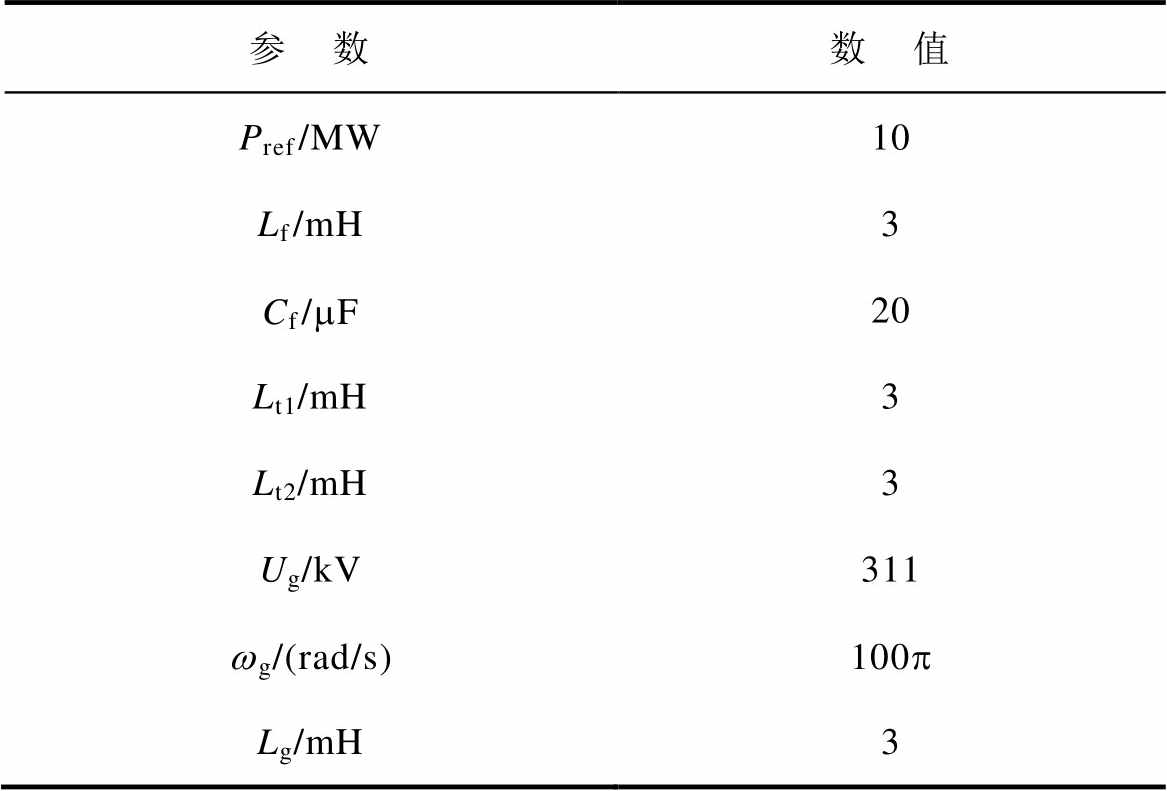
参 数数 值 Pref/MW10 Lf/mH3 Cf/mF20 Lt1/mH3 Lt2/mH3 Ug/kV311 wg/(rad/s)100p Lg/mH3
附表2 控制结构参数
App.Tab.2 Control structure parameters
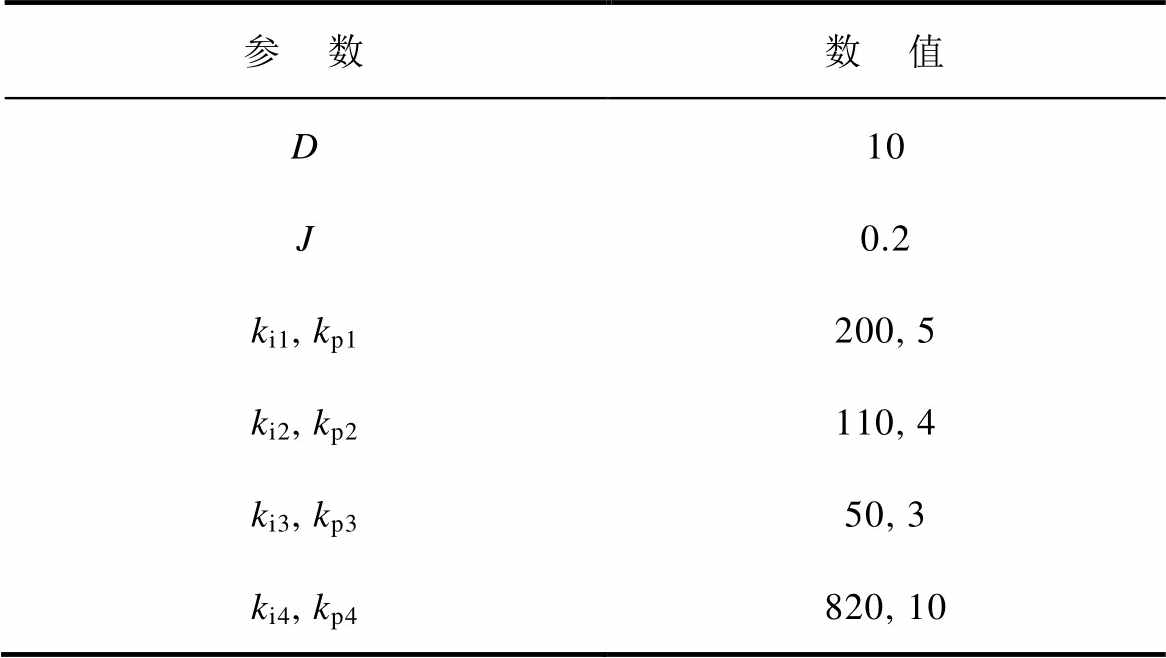
参 数数 值 D10 J0.2 ki1, kp1200, 5 ki2, kp2110, 4 ki3, kp350, 3 ki4, kp4820, 10
3. 各参数发生分岔后的相平面轨迹
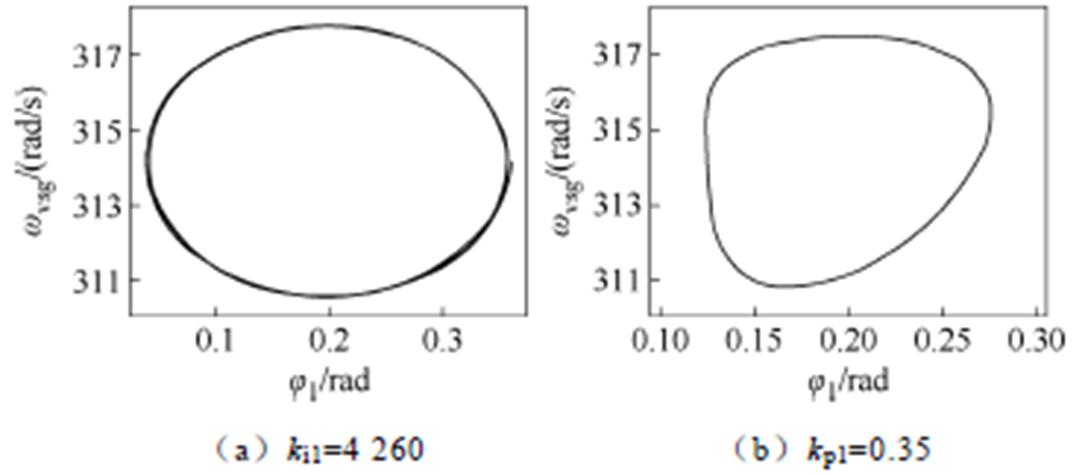
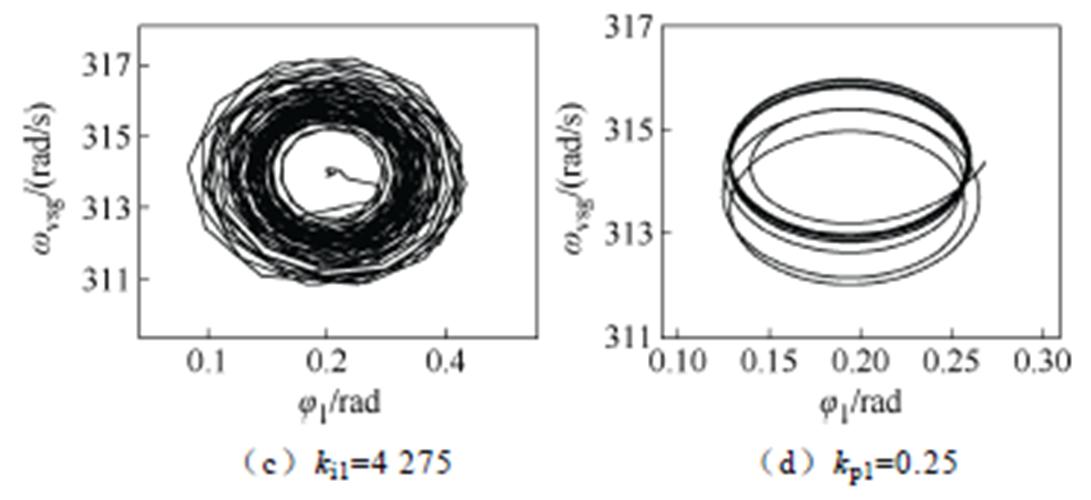
附图1 ki1、kp1参数分岔后的相平面轨迹
App.Fig.1 Phase plane trajectories after the bifurcation of parameters ki1 and kp1
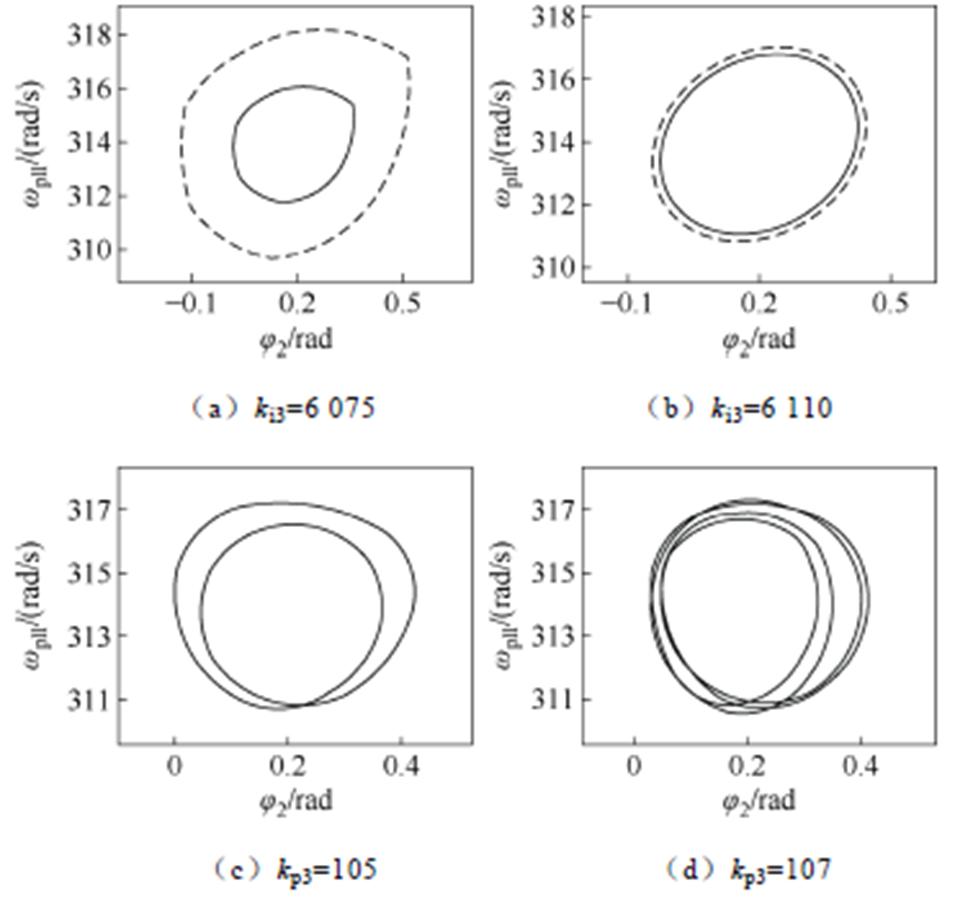
附图2 ki3、kp3参数分岔后的相平面轨迹
App.Fig.2 Phase plane trajectories after the bifurcation of parameters ki3 and kp3
4. 超临界和亚临界Hopf分岔
Hopf分岔可以是超临界的,也可以是亚临界的。超临界Hopf分岔又称为软分岔,分岔发生时稳定的平衡点变得不稳定,同时产生一个稳定的极限环,极限环幅值从0开始连续增长,如附图3a所示。相应地,基于线性系统分析,当发生超临界Hopf分岔时有一对共轭特征根l穿过虚轴如附图3c所示,极限环频率与特征根虚部相关。因此,对于超临界Hopf分岔,当参数越过分岔点时仍然可以基于平衡点的线性系统分析预测到极限环的大致行为,如大小、频率等。
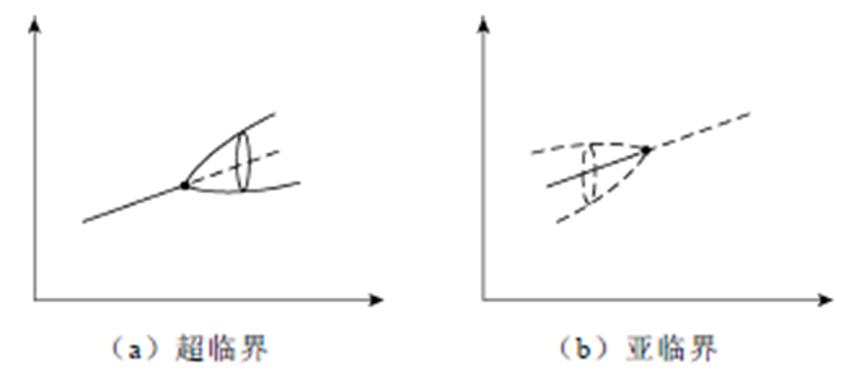
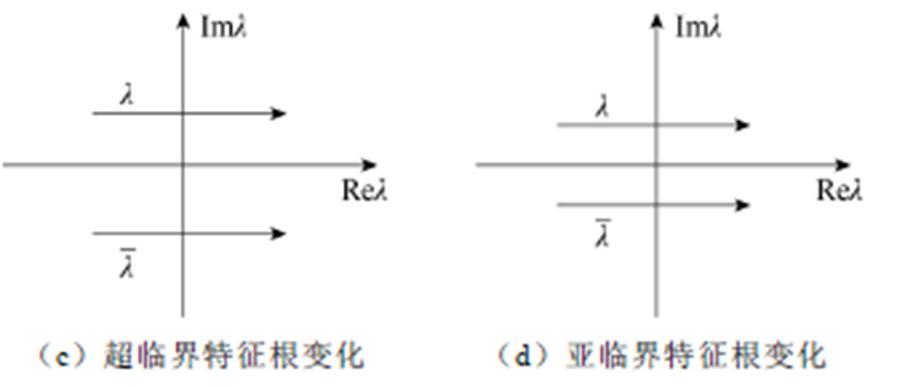
附图3 超临界和亚临界Hopf分岔
App.Fig.3 Supercritical and subcritical Hopf bifurcations
亚临界Hopf分岔又称为硬分岔,分岔前不稳定极限环和稳定工作点共存,发生分岔后系统变得不稳定,如附图3b所示。亚临界Hopf分岔后的系统的行为取决于系统的具体结构和参数。在某些情况下,系统可能会表现为无法维持稳定的运行状态,如发散或混沌。在某些特定情况下,系统也可能通过跳变到一个新的稳定状态或围绕一个新的极限环进行振荡。然而,基于线性系统分析,现象仍是有一对共轭特征根穿过虚轴,如附图3d所示。显然线性系统的局限性较为明显,仅局限于判断系统是否失稳,而在判定失稳类型,以及分析失稳后的进一步动力学变化方面,存在显著不足。
判断Hopf分岔是超临界的还是亚临界的,简单且快速的一种方法是通过计算机模拟。若在不动点失稳后出现一个小的吸引极限环,并且随着参数反向变化振幅收缩回0,那么这个分岔就是超临界的。否则就可能是亚临界的,在这种情况下最近的吸引子可能离不动点很远,而且随着参数反向变化时系统会呈现滞后的现象。
5. 各分岔点特征根及系统状态
附表3 各分岔点特征根及系统状态
App.Tab.3 Characteristic roots and system states at each bifurcation point
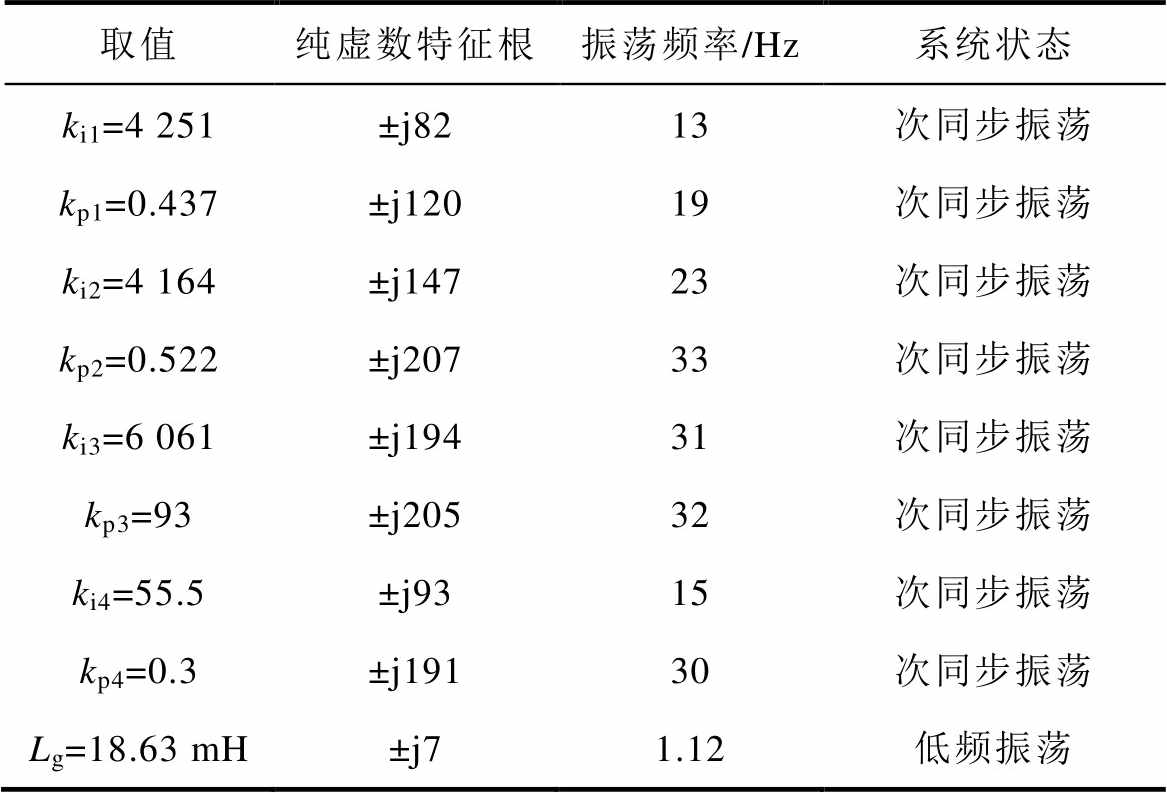
取值纯虚数特征根振荡频率/Hz系统状态 ki1=4 251±j8213次同步振荡 kp1=0.437±j12019次同步振荡 ki2=4 164±j14723次同步振荡 kp2=0.522±j20733次同步振荡 ki3=6 061±j19431次同步振荡 kp3=93±j20532次同步振荡 ki4=55.5±j9315次同步振荡 kp4=0.3±j19130次同步振荡 Lg=18.63 mH±j71.12低频振荡
参考文献
[1] 徐衍会, 成蕴丹, 刘慧, 等. 基于瞬时功率的次同步振荡频率提取及振荡源识别方法[J]. 电工技术学报, 2023, 38(11): 2894-2907.
Xu Yanhui, Cheng Yundan, Liu Hui, et al. Sub- synchronous oscillation frequency extraction and oscillation source identification method based on instantaneous power[J]. Transactions of China Elec- trotechnical Society, 2023, 38(11): 2894-2907.
[2] 严文博, 黄云辉, 方正, 等. 低阻抗下构网型变流器稳定性机理分析[J]. 高电压技术, 2025, 51(3): 1444-1453.
Yan Wenbo, Huang Yunhui, Fang Zheng, et al. Stability mechanism analysis of grid-forming con- verter connected to low impedance grid[J]. High Voltage Engineering, 2025, 51(3): 1444-1453.
[3] 黄萌, 舒思睿, 李锡林, 等. 面向同步稳定性的电力电子并网变流器分析与控制研究综述[J]. 电工技术学报, 2024, 39(19): 5978-5994.
Huang Meng, Shu Sirui, Li Xilin, et al. A review of synchronization-stability-oriented analysis and control of power electronic grid-connected converters[J]. Transactions of China Electrotechnical Society, 2024, 39(19): 5978-5994.
[4] 方正, 黄云辉, 严文博, 等. 构网型与跟网型变流器交互作用对并联系统小干扰稳定性的影响分析[J]. 电力自动化设备, 2025, 45(2): 134-142.
Fang Zheng, Huang Yunhui, Yan Wenbo, et al. Influence analysis of interaction between grid- forming and grid-following converters on small interference stability of parallel system[J]. Electric Power Automation Equipment, 2025, 45(2): 134-142.
[5] 高本锋, 邓鹏程, 孙大卫, 等. 基于匹配控制的构网型直驱风电场次同步振荡机理与特性研究[J]. 电工技术学报, 2024, 39(9): 2755-2770.
Gao Benfeng, Deng Pengcheng, Sun Dawei, et al. Mechanism and characteristics of subsynchronous oscillation of grid-forming direct-drive wind farm based on matching control[J]. Transactions of China Electrotechnical Society, 2024, 39(9): 2755-2770.
[6] 刘朋印, 谢小荣, 李原, 等. 构网型控制改善跟网型变流器次/超同步振荡稳定性的机理和特性分析[J]. 电网技术, 2024, 48(3): 990-997.
Liu Pengyin, Xie Xiaorong, Li Yuan, et al. Mechanism and characteristics of grid-forming control for improving sub/super synchronous oscillation stability of grid-following-based grid-connected converter[J]. Power System Technology, 2024, 48(3): 990-997.
[7] 雷雨, 李光辉, 王伟胜, 等. 跟网型和构网型新能源并网控制阻抗对比与振荡机理分析[J]. 中国电机工程学报, 2025, 45(1): 150-163.
Lei Yu, Li Guanghui, Wang Weisheng, et al. Com- parison of impedance characteristics and oscillation mechanism for grid following and grid forming renewable energy[J]. Proceedings of the CSEE, 2025, 45(1): 150-163.
[8] 胡宇飞, 田震, 查晓明, 等. 构网型与跟网型变流器主导孤岛微网阻抗稳定性分析及提升策略[J]. 电力系统自动化, 2022, 46(24): 121-131.
Hu Yufei, Tian Zhen, Zha Xiaoming, et al. Impedance stability analysis and promotion strategy of islanded microgrid dominated by grid-connected and grid- following converters[J]. Automation of Electric Power Systems, 2022, 46(24): 121-131.
[9] 阮亮, 王杨, 肖先勇, 等. 跟网型和构网型变流器动态交互特性分析[J]. 智慧电力, 2024, 52(7): 103-110.
Ruan Liang, Wang Yang, Xiao Xianyong, et al. Dynamic interaction control characteristic analysis of grid following and grid-forming inverters[J]. Smart Power, 2024, 52(7): 103-110.
[10] 张斌, 张学广, 徐殿国. 构网型与跟网型变流器混联并网系统配比关键影响因素分析[J]. 电力系统自动化, 2025, 49(1): 47-58.
Zhang Bin, Zhang Xueguang, Xu Dianguo. Analysis on key influence factors of ratio of grid-forming and grid-following converters in hybrid parallel grid- connected system[J]. Automation of Electric Power Systems, 2025, 49(1): 47-58.
[11] 李翼翔, 田震, 唐英杰, 等. 考虑构网型与跟网型逆变器交互的孤岛微电网小信号稳定性分析[J]. 电力自动化设备, 2022, 42(8): 11-18.
Li Yixiang, Tian Zhen, Tang Yingjie, et al. Small- signal stability analysis of island microgrid con- sidering interaction between grid-forming converter and grid-following converter[J]. Electric Power Automation Equipment, 2022, 42(8): 11-18.
[12] 尚佳宇, 虞家骏, 刘增, 等. 构网型与跟网型逆变器并联系统精确频域建模及简化稳定判据[J]. 电力系统自动化, 2025, 49(2): 53-63.
Shang Jiayu, Yu Jiajun, Liu Zeng, et al. Accurate frequency-domain modeling and simplified stability criterion for parallel grid-forming and grid-following inverter system[J]. Automation of Electric Power Systems, 2025, 49(2): 53-63.
[13] 程成, 谢少军, 谭玲娟, 等. 跟网型逆变器的非线性模型及稳定性分析方法[J]. 电力系统自动化, 2022, 46(6): 137-143.
Cheng Cheng, Xie Shaojun, Tan Lingjuan, et al. Nonlinear model and stability analysis method for grid-following inverter[J]. Automation of Electric Power Systems, 2022, 46(6): 137-143.
[14] Ma Rui, Yang Ziqian, Cheng Shijie, et al. Sustained oscillations and bifurcations in three-phase voltage source converter tied to AC grid[J]. IET Renewable Power Generation, 2020, 14(18): 3770-3781.
[15] 李水天, 林涛, 盛逸标, 等. 面向次/超同步振荡的控制器参数稳定域构建[J]. 中国电机工程学报, 2020, 40(22): 7221-7230.
Li Shuitian, Lin Tao, Sheng Yibiao, et al. Con- struction of stability region of control parameters against sub/super synchronous oscillation[J]. Pro- ceedings of the CSEE, 2020, 40(22): 7221-7230.
[16] 洪镇堃, 占萌. 构网型变流器并网系统在强弱电网下的分岔分析[J]. 电力自动化设备, 2023, 43(9): 27-32, 54.
Hong Zhenkun, Zhan Meng. Bifurcation analysis of grid-forming converter system connected with stiff or weak AC grids[J]. Electric Power Automation Equipment, 2023, 43(9): 27-32, 54.
[17] 杨黎晖, 马西奎. 基于分岔理论的含双馈风电机组的电力系统电压稳定性分析[J]. 电工技术学报, 2012, 27(9): 1-8.
Yang Lihui, Ma Xikui. Analysis on voltage stability of power system with doubly fed induction generator wind turbine based on bifurcation theory[J]. Transa- ctions of China Electrotechnical Society, 2012, 27(9): 1-8.
[18] 陶慧, 赵世彬, 贾春华. 准PR调节下单相光伏并网逆变器的非线性研究[J]. 太阳能学报, 2022, 43(10): 21-28.
Tao Hui, Zhao Shibin, Jia Chunhua. Nonlinear research of single-phase photovoltaic grid-connected inverter with quasi PR controller[J]. Acta Energiae Solaris Sinica, 2022, 43(10): 21-28.
Abstract In recent years, the large-scale integration of new energy sources, such as wind and solar power, into the power grid through power electronic devices has led to frequent system oscillations and instability. Due to the strong nonlinearity of power electronic devices, traditional linear analysis methods cannot accurately reveal the mechanisms of oscillatory instability. Although some scholars have proposed nonlinear system theories and signal analysis techniques, mostfocus on single converters and single parameters. Therefore, this paper uses nonlinear bifurcation theory to analyze the bifurcation characteristics of single-and double-parameter systems in heterogeneous grid-connected systems with coexisting grid-following and grid-forming control strategies, clarifying the mechanisms of oscillatory instability and determining parameter stability boundaries.
First, a 22-order state-space model of the system is established by analyzing the main circuit structure and control strategies of the heterogeneous new energy grid-connected system. Then, the bifurcation characteristics of single and dual parameters under coordinated control of each link in the model are analyzed. Bifurcation diagrams and phase-plane trajectory diagrams are used to investigate the system's nonlinear dynamics. Furthermore, the parameter stability domain of the system is constructed from the bifurcation characteristics of each parameter, and changes in the characteristic roots near each bifurcation point are analyzed using the eigenvalue analysis method.
Numerical calculations and simulation analyses reveal the following. (1) When the PI control parameters in the grid-forming converter are changed, a pair of conjugate complex roots changes from negative to positive real parts. The stable operating point becomes unstable, leading to a stable limit cycle and a supercritical Hopf bifurcation. As the parameters are adjusted, multiple pairs of conjugate complex roots cross the imaginary axis, and the limit cycle generates multiple tori along the periodic orbit, causing a Neimark-Sacker bifurcation. (2) When the PI control parameters in the grid-following converter are changed, a pair of conjugate complex roots also changes from negative to positive real parts and generates a stable limit cycle. A supercritical Hopf bifurcation is generated. As the parameters are adjusted, the system undergoes a loop saddle-node bifurcation and a period-doubling bifurcation, corresponding to the collision-disappearance and doubling of the limit cycle, respectively. (3) When the inductance parameter of the grid-side line changes, the unstable limit cycle disappears, and the stable operating point becomes unstable, leading to a subcritical Hopf bifurcation. As the parameters are changed, two unstable operating points approach each other, eventually collide, and disappear. A generalized saddle-node bifurcation occurs. (4) Dual-parameter bifurcation analysis of the proportional and integral coefficients in the PI controllers of grid-following and grid-forming converters reveals Hopf-Hopf bifurcation and general Hopf bifurcation.
The system’s stability information and its dynamics’global picture can be obtained, helping to understand subsequent dynamic changes after system instability. Moreover, the weak nodes of the system can be identified from the bifurcation characteristics of each parameter, and the parameter stability domain can be constructed to prevent system oscillatory instability.
Keywords:Grid-following converters, grid-forming converter, bifurcation characteristics, parameter stability region, characteristics of oscillation instability
中图分类号:TM712
DOI: 10.19595/j.cnki.1000-6753.tces.250316
国家自然科学基金资助项目(52377102)。
收稿日期 2025-02-27
改稿日期 2025-03-18
徐衍会 男,1978年生,教授,博士生导师,研究方向为动态电力系统分析与负荷建模。
E-mail: xuyanhui23@sohu.com(通信作者)
董志伟 男,1999年生,硕士研究生,研究方向为风电并网系统非线性稳定机理。
E-mail: dongzhiwei54@163.com
(编辑 郭丽军)