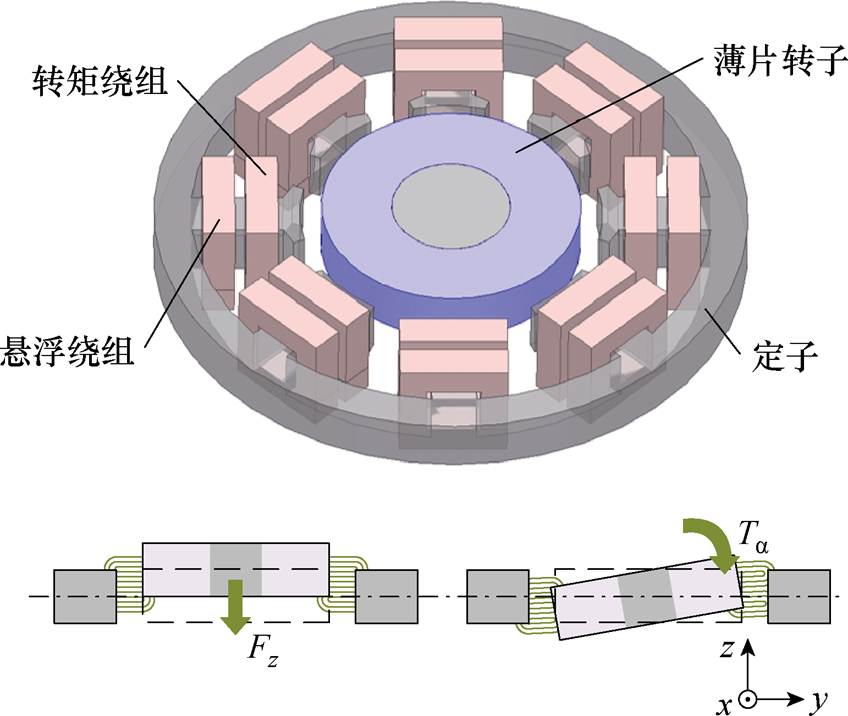
图1 永磁型无轴承薄片电机结构示意图及轴向悬浮原理
Fig.1 Structure diagram and Axial levitation principle of BPMSM
摘要 具有转子五自由度全悬浮功能的永磁型无轴承薄片电机(BPMSM)因被动轴向悬浮的弱刚度特性,易在扰动或负载切换时发生轴向振动,影响系统的稳定运行。为增强轴向悬浮稳定性,该文在建立悬浮转子所受轴向力模型的基础上,提出一种轴向力刚度可调节的控制策略。首先,在考虑转子轴向偏移以及绕组电流的影响下,建立磁路等效模型,推导轴向被动悬浮力表达式。为验证所建立模型的准确性,从电机本体参数的角度分析轴向力静态特性;从轴向位移和绕组电流的角度分析转子在不同工况下的轴向力动态特性。基于轴向力弱刚度的特点以及对轴向力特性的分析,构建一种通过附加直轴电枢电流以调节轴向力刚度的轴向控制方案,实现对转子轴向位移振动的抑制,从而提高轴向悬浮稳定性以及抗扰能力。最后,基于一台无轴承实验样机,通过仿真和实验,验证该文所建立模型的准确性以及提出的轴向控制策略的有效性。
关键词:永磁型无轴承薄片电机(BPMSM) 轴向力 数学模型 刚度调节 特性分析
无轴承电机由于其密封性好、无需润滑、损耗低、高速高精等优势,作为特种电机在电气领域具有重要的科研价值[1-3]。同时,在半导体制造、医疗器械、航空航天等高精领域,无轴承电机有着难以替代的价值和广阔的应用前景[4-6]。
相较于利用电磁力实现定转子间无接触运转的主动磁轴承电机[7],较长的轴向长度导致电机的功率密度减小,降低了转子的临界转速和机械可靠性,同时在应用中也常受到体积、质量等因素的限制[8]。因此无轴承电机在采用磁悬浮原理的基础上,将转子悬浮和转矩高度集成,在不失磁悬浮电机原本优势的情况下,提高电机的功率密度[9]。
无轴承电机的负载形式复杂多变。例如,磁悬浮泵在运行过程中,由于液流作用在叶轮表面产生的力不平衡,在转子上产生与转子轴心线相平行的力,进而导致转子在轴向产生位移或扭转[10]。根据磁阻最小原理,定转子间会产生轴向力和轴向转矩,如图1所示。转子发生轴向向上偏移,致使气隙变大,磁阻增大,而转子总会有往磁阻最小位置运动的趋势,气隙中将产生一个轴向向下的磁场力分量,迫使转子回到中心位置,即磁阻最小位置,轴向扭转自由度同理。然而,轴向被动悬浮结构使无轴承电机具有轴向力刚度较弱的特点,轴向悬浮的稳定性不足。
图1 永磁型无轴承薄片电机结构示意图及轴向悬浮原理
Fig.1 Structure diagram and Axial levitation principle of BPMSM
针对该问题,现有的改进方案主要有增强被动和主动控制两种思路。第一种思路是通过优化原定转子结构及尺寸,增强轴向被动悬浮力[11-15]。文献[11]提出一种双层片状转子的结构,在相同轴向长度的情况下,增加转子轴向偏移时的边缘磁通,从而增大轴向被动悬浮力,该方案相较于单层转子可以使轴向悬浮力增大85%。文献[12]同样采用双层定转子的结构,在层间插入轴向充磁的永磁体,以进一步加强无轴承电机轴向力以及扭转回复力。文献[13]则更加直接地在定转子同一侧分别加上两块轴向磁化且磁化方向相反的永磁体,提供高轴向刚度。与其相似的还有一种轴向C型铁环,附着在定子两侧,与贴合在外转子轴向两侧的轴向磁化永磁体形成闭合磁路,增强轴向被动悬浮力[14]。还有学者将海尔贝克永磁阵列用于增强无轴承电机被动悬浮力[15]。
提高无轴承电机轴向稳定性的第二种思路是设计能够产生轴向磁通的电机结构,将轴向被动悬浮改为轴向主动悬浮控制[16-23]。文献[16-17]通过采用V型绕组的结构,使绕组在输出转矩的同时产生轴向力分量。还有一种双层斜槽绕组结构[18],两层线圈的电流之和用于产生转子的转矩分量,轴向分量则由两层转子的差值决定。文献[19]基于锥形转子的特殊结构,施加磁化电流可以同时产生径向和轴向磁通分量,实现五个自由度的主动悬浮。另外,轴向磁通结构[20-23]在轴向主动悬浮控制的无轴承电机中也得到较多的应用,该结构用定子绕组的直轴分量产生轴向磁通,从而控制转子的轴向悬浮,但径向仍是通过永磁体实现被动悬浮,难以保证负载工况下的稳定悬浮。
上述方案虽然在一定程度上对无轴承电机轴向被动悬浮的弱刚度特性进行改善,但大部分方案需要复杂的定转子结构或增加额外的永磁体,增大了加工复杂度与控制难度。另一方面,从现有公开的文献来看,对无轴承电机轴向力数学建模的内容鲜有发表,而在设计电机时,对轴向性能的考虑是必要的,且对轴向力的特性分析也至关重要。
本文在考虑轴向位移和绕组电流的影响下,对永磁型无轴承薄片电机(Bearingless Permanent Magnet Slice Motor, BPMSM)的轴向悬浮力进行建模。在此基础上,设计了一种通过控制直轴电枢电流来实现可调悬浮力刚度的轴向控制策略,从而提高转子在轴向悬浮系统上的抗扰能力和稳定性。其次,通过有限元仿真验证模型的准确性,以电机本体结构参数、轴向位移和绕组电流为主要参数对轴向力特性进行分析。最后,搭建永磁型无轴承薄片电机实验平台,对建立轴向模型的准确性和所提轴向控制策略的有效性进行仿真和实验验证。
本文的研究对象为两相永磁型无轴承薄片电机,结构如图1所示。转矩绕组极对数为1,悬浮绕组极对数为2,转子采用表贴式永磁结构。电机径向位移 (x、y) 和转矩T为可控自由度,轴向位移z和轴向转矩 (Ta、Tb) 为被动自由度。
为研究BPMSM轴向力特性,分析影响电机轴向性能的因素,本节对BPMSM轴向力进行建模。图2为转子发生轴向偏移时的磁路等效模型。
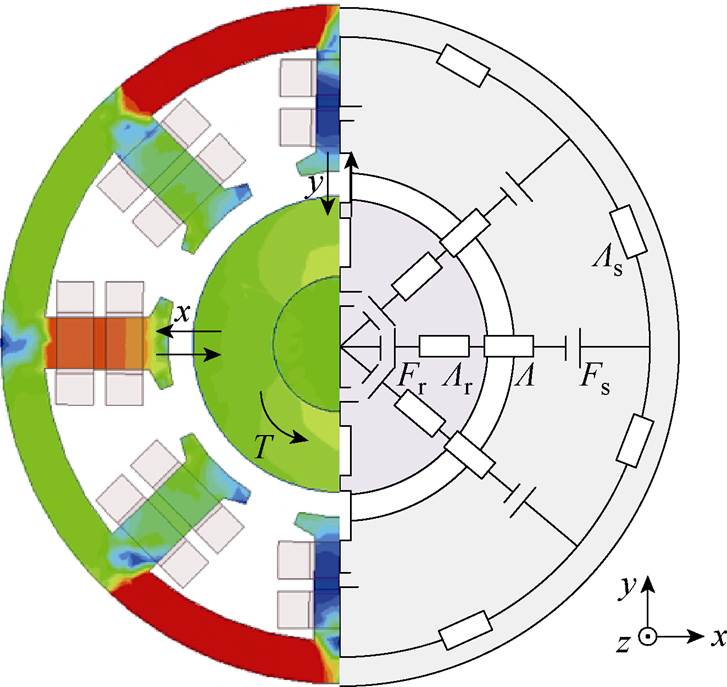
图2 永磁型无轴承薄片电机磁路等效模型
Fig.2 Magnetic circuit equivalent model of BPMSM
首先取BPMSM的一个轴向截面进行分析,并对分析过程作如下假设:
(1)忽略齿槽漏感、端部漏感及磁饱和效应。
(2)定子绕组在空间对称分布,忽略相电流所产生的磁动势的高次谐波分量。
(3)采用单位厚度进行分析。
BPMSM转子轴向偏移示意图如图3所示,图中,z为轴向位移,h为定转子轴向长度,r为转子半径,d0为气隙长度,lM为每极磁路中的永磁体磁化方向上的长度。
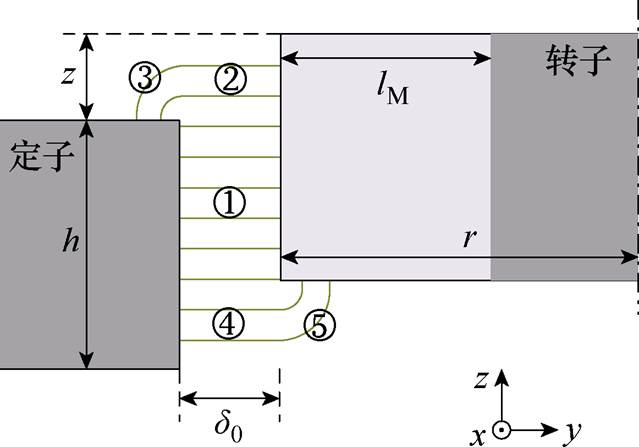
图3 BPMSM转子轴向偏移示意图
Fig.3 Axial displacement diagram of BPMSM
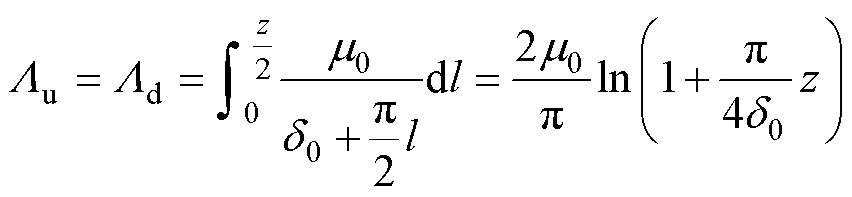
图3中,定转子间的气隙分为上部磁导Lu、中部磁导Lm和下部磁导Ld。上部磁路包括一段直线磁路②和一段1/4圆的弧形磁路③,该磁路的宽度为轴向偏移量的一半,即z/2;中部磁路①为直线磁路;下部磁路与上部磁路对称,包括一段直线磁路④和一段1/4圆的弧形磁路⑤,磁路宽度同样为z/2。上部、下部和中部磁导Lu、Ld、Lm分别可分别表示为
 (1)
(1)
 (2)
(2)
式中,m0为真空磁导率;l为轴向位移量。
总的气隙磁导为
 (3)
(3)
永磁体磁路可以等效为磁动势源Fr与一个恒定内磁导Lr串联,如图2所示。对于给定性能和尺寸的永磁体,磁动势源和内磁导为常数。
 (4)
(4)
式中,Hc为永磁体矫顽力。
无轴承电机定子绕组分为悬浮和转矩两部分,同一相的悬浮绕组使具有相同磁链方向的位置气隙磁通密度增大,而相反方向的位置气隙磁通密度减 小[2],因此对转子轴向力的作用等大反向。且一般情况下,当转子径向稳定悬浮时悬浮电流较小,几乎为零,因此可以忽略悬浮绕组的影响。那么,定子磁路可以等效为一个磁动势源Fs串联一个定子磁导Ls,硅钢片的磁阻很小,可以忽略不计。磁动势源的大小主要与转矩电流有关,可以表示为
 (5)
(5)
式中,N为转矩绕组匝数;itd为直轴电枢电流。
磁场的能量主要集中在气隙中,根据等效磁路模型可求得气隙上的磁压降为
 (6)
(6)
其中
式中,Fd为气隙上的磁压降;kF为总磁压降在气隙上分压的系数。
BPMSM在实际运行过程中,由于转子外壳以及泵室的限制,转子轴向位移一般不超过4 mm,轴向偏移量小范围变化时,气隙磁导变化不大。为简化计算,气隙磁压降Fd随轴向位移变化的变化量约等于零,即kF看作常数。
气隙中的磁能可以表示为
 (7)
(7)
根据虚功法,求得转子单边的轴向磁拉力为
 (8)
(8)
对其绕圆周积分可以得到整个转子的轴向力为
 (9)
(9)
对于8齿BPMSM,式(9)可表示为
 (10)
(10)
其中
式中,q为转子圆周位置角,表示气隙磁动势受定子齿数和齿宽弧度影响的系数;a为定子齿宽弧度。
当轴向位移等于零时,轴向的回复力等于零;当轴向位移为正时,轴向力方向与轴向位移相反,幅值随轴向位移增大而增大,且轴向力与轴向位移之间存在一定的非线性。轴向偏移越大,轴向力与轴向位移的比值(即轴向力刚度)就越小。因此,当转子在轴向上受到较大的冲击或者负载切换时,电机轴向稳定性会大幅下降。
为验证本文建立的BPMSM轴向力模型的准确性,分析电机本体参数、轴向位移和直轴电枢电流对轴向力的影响,本节对无轴承电机三维模型进行有限元仿真分析,仿真参数见表1。
首先在无定子电流条件下,对BPMSM本体参数对轴向力的影响进行仿真分析。图4为轴向力与气隙长度、永磁体磁化长度、转子半径和转子轴向长度之间的关系。
表1 有限元仿真参数
Tab.1 Finite element simulation parameter
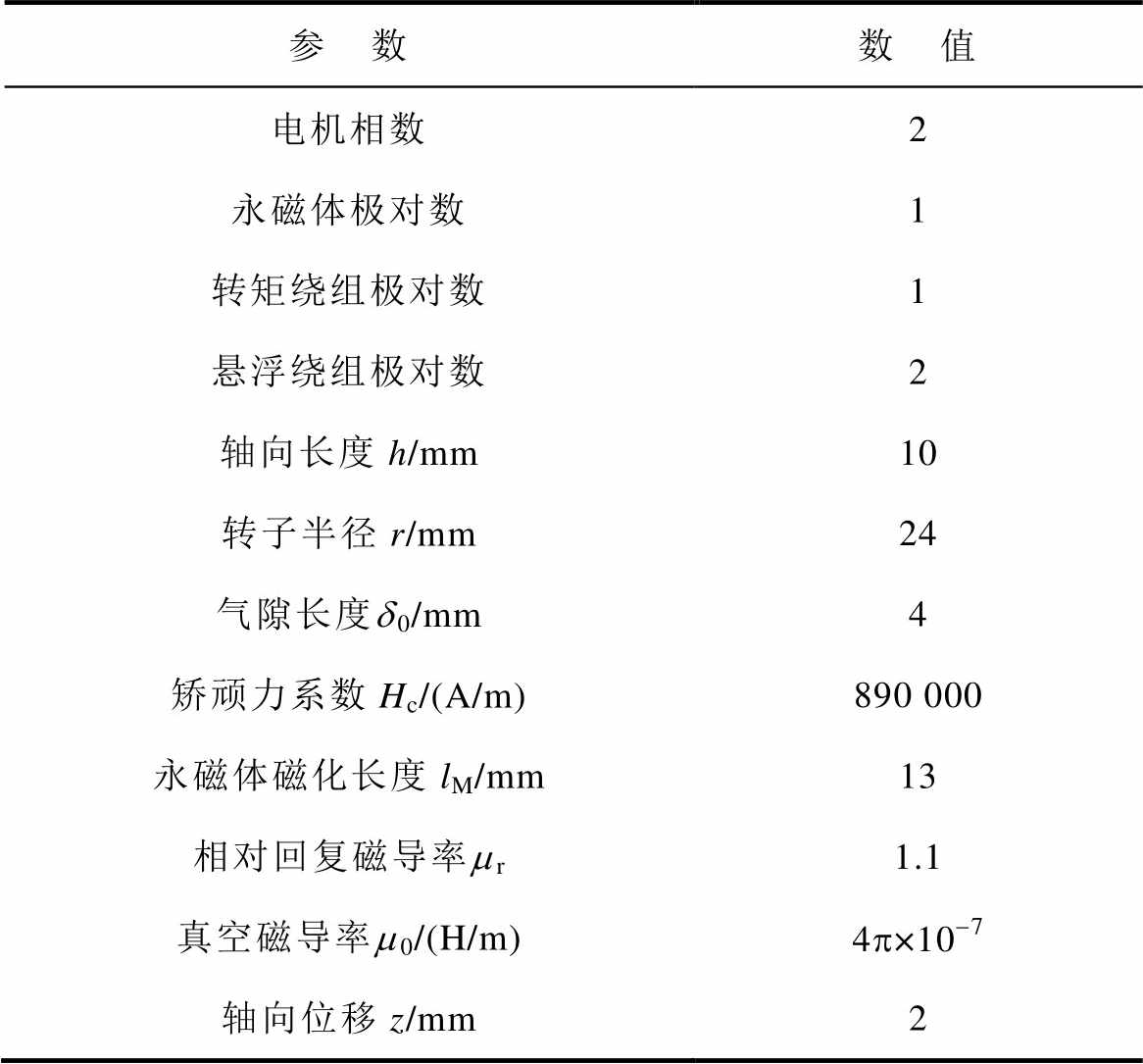
参 数数 值 电机相数2 永磁体极对数1 转矩绕组极对数1 悬浮绕组极对数2 轴向长度h/mm10 转子半径r/mm24 气隙长度d0/mm4 矫顽力系数Hc/(A/m)890 000 永磁体磁化长度lM/mm13 相对回复磁导率mr1.1 真空磁导率m0/(H/m)4p×10-7 轴向位移z/mm2
轴向力与气隙长度的关系如图4a所示,考虑到无轴承薄片电机作为泵的应用场合,泵室以及液体流动空间的存在,气隙长度不宜过小,可以看到轴向力随着气隙长度的增大而减小。气隙长度增大,意味着磁路中磁阻增大,式(7)中等效气隙磁导减小,磁能减小,因此轴向力随之减小。计算模型与仿真的误差均不超过8.9%。图4b为轴向力与永磁体磁化长度的关系,轴向力随着永磁体磁化长度的增大而增大,永磁体磁化长度的增加意味着磁路模型中的磁动势源Fr增大,轴向力自然也随之增大。计算模型与仿真的误差均不超过7.41%。图4c为轴向力与转子几何尺寸的关系,主要与转子半径和轴向长度有关。考虑转子半径时,仿真时考虑到控制变量,不改变气隙长度。对于单边轴向磁拉力,其大小与转子半径无关,但转子整体受力是绕转子圆周环路的积分,转子半径越大,转子整体的轴向力也增大。计算模型与仿真的误差均不超过5.94%。轴向长度增大时,轴向力逐渐减小,但影响不大,几乎可以忽略。这是因为定转子轴向长度的变化并不会带来上部磁导和下部磁导的变化,而轴向偏移时,主要产生轴向力的就是这两部分磁路,因此轴向长度的影响几乎可以忽略。计算模型与仿真的误差均不超过6.13%。
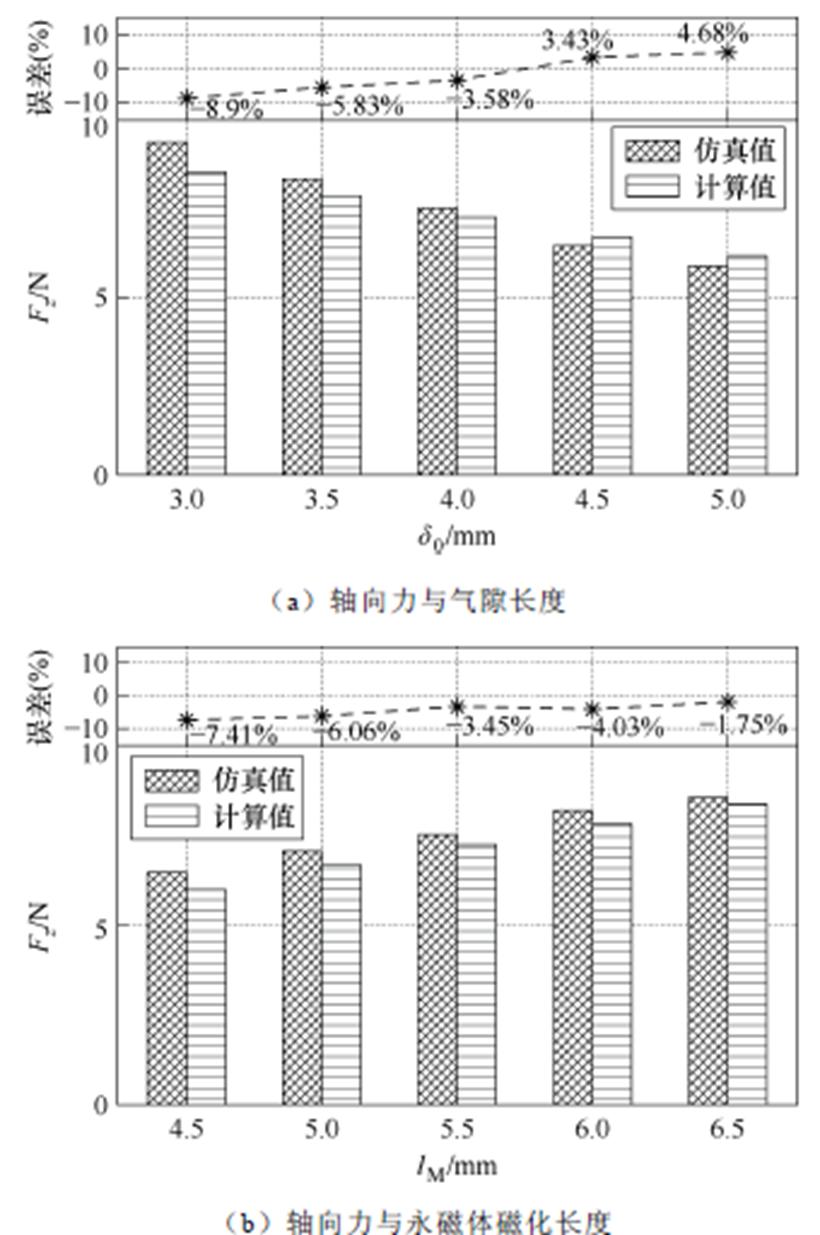
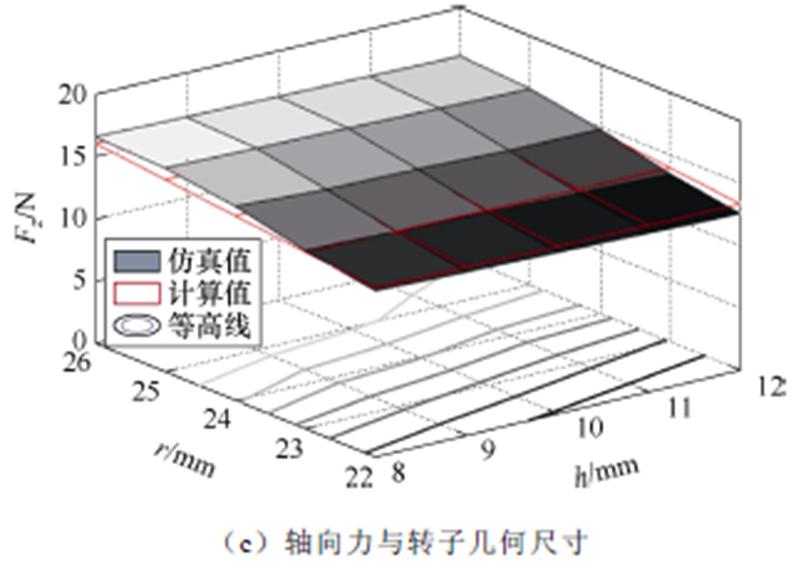
图4 轴向力与本体参数
Fig.4 Axial forces with motor parameters
本节选取轴向位移和直轴电枢电流两个主要参数,结合有限元仿真,分析BPMSM在不同工况下轴向悬浮的动态特性。
2.2.1 轴向位移特性
首先对不施加定子绕组电流情况下,轴向力与轴向位移的关系进行分析。图5为轴向位移z从0~4 mm的电机气隙磁通密度云图,图6为气隙磁通密度、轴向力随轴向位移变化曲线(有限元仿真)。随着轴向位移增大,气隙磁通密度随之增大,气隙磁导增大,轴向力的幅值也随之增大。在位移较小时,轴向力与轴向位移几乎呈线性关系,随着位移的增大,漏磁增大,气隙磁通密度增大的幅度减小,轴向力增大幅度逐渐减小,轴向位移刚度也就随之减小。
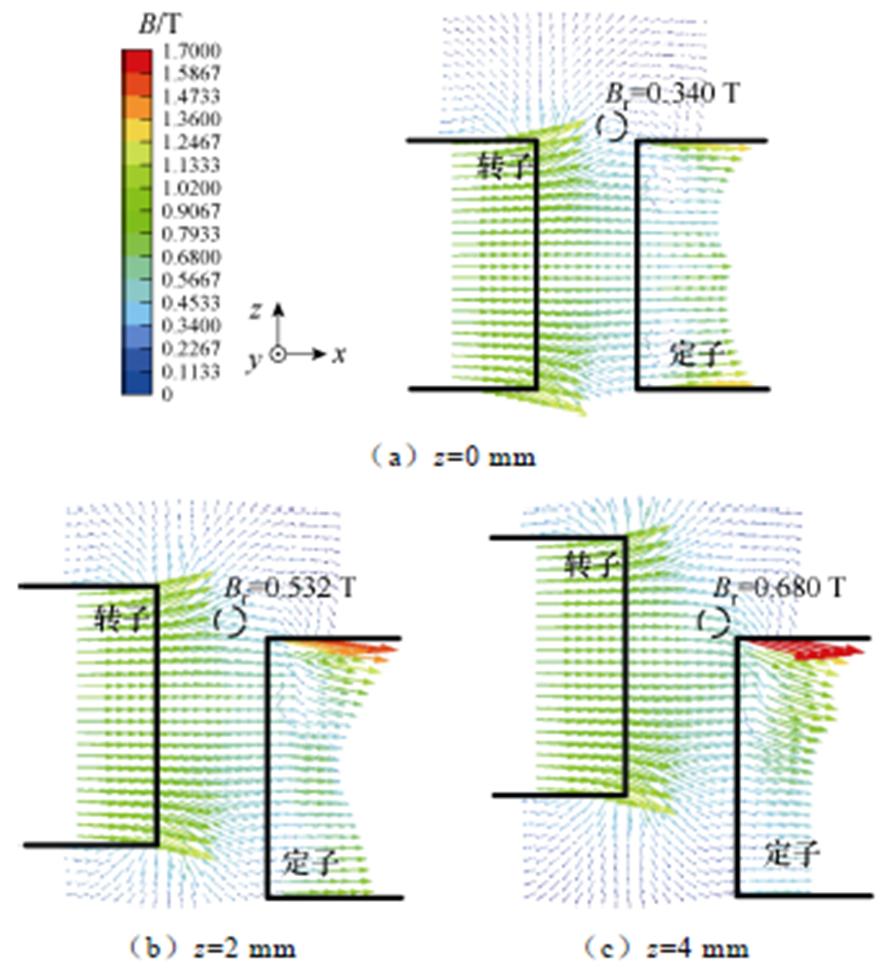
图5 不同轴向位移下气隙磁通密度云图
Fig.5 Air gap magnetic flux densities with axial displacements
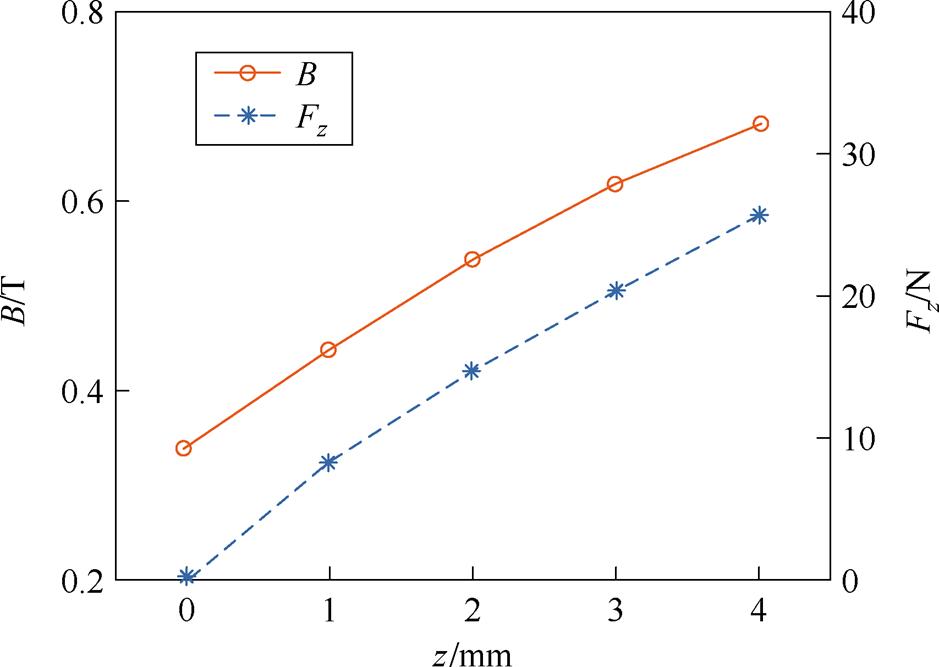
图6 气隙磁通密度和轴向力随位移变化曲线(仿真)
Fig.6 Air gap magnetic flux densities and axial forces with different axial displacements (simulation)
2.2.2 直轴电枢电流特性
BPMSM轴向的被动悬浮力主要依靠永磁转子与定子铁心的被动磁阻力,但定子电流同样会对轴向力产生影响。图7给出轴向位移2 mm,直轴电枢电流itd从-4~4 A变化的电机气隙磁通密度云图,图8为磁通密度、轴向力随电流变化曲线(有限元仿真)。当直轴电枢电流大于零时,转子位移处气隙磁通密度增大,直轴电枢电流等效的磁动势源幅值增大,使转子上的磁压降增大,转子所受到的轴向力也增大,与电流近似成正比关系;当直轴电枢电流小于零时,转子位移处气隙磁通密度减弱,转子所受到的轴向力也减小。
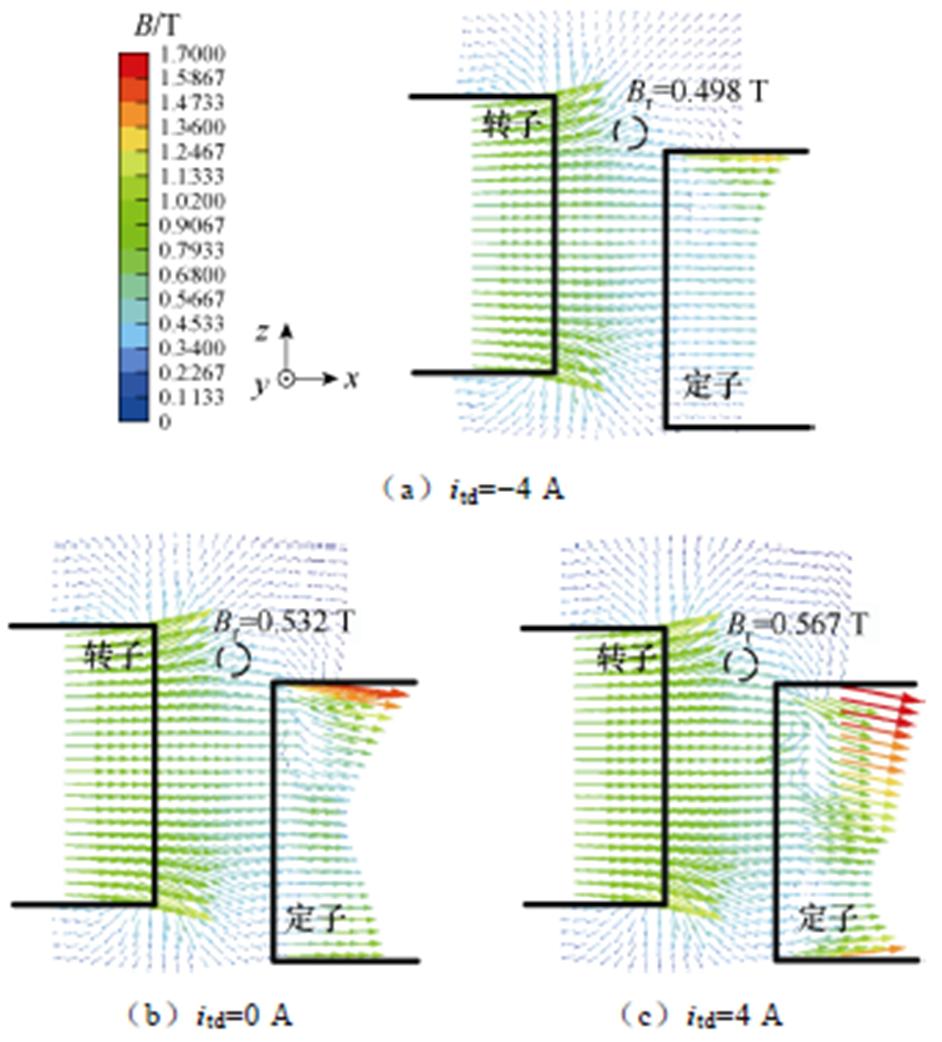
图7 不同电流的气隙磁通密度云图
Fig.7 Air gap magnetic flux densities with currents
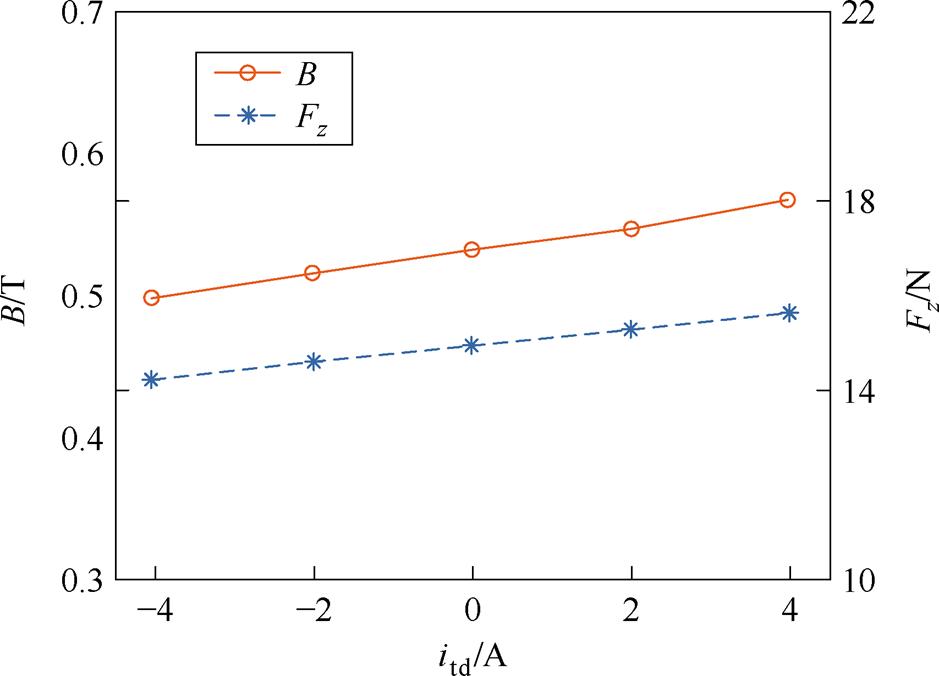
图8 气隙磁通密度和轴向力随电流变化曲线(仿真)
Fig.8 Air gap magnetic flux densities and axial forces with different axial currents (simulation)
为进一步分析轴向位移和直轴电枢电流变工况下的轴向力特性,图9给出转子轴向力与直轴电枢电流和轴向位移的关系。轴向力方向与轴向位移方向相反,幅值随着轴向位移的增大而增大。直轴电枢电流大于0,轴向力增大,增大幅值与电流近似成正比;反之,减小。图10为计算模型与有限元仿真误差曲面。在全位移全电流工况下,最大误差不超过9.39%。图11和图12给出转子轴向力与轴向位移和直轴电枢电流关系以及误差的实验结果,结论与仿真结论分析一致。在位移电流变工况下,最大误差不超过7.5%,证明1.2节推导的永磁型无轴承薄片电机轴向力模型的准确性。
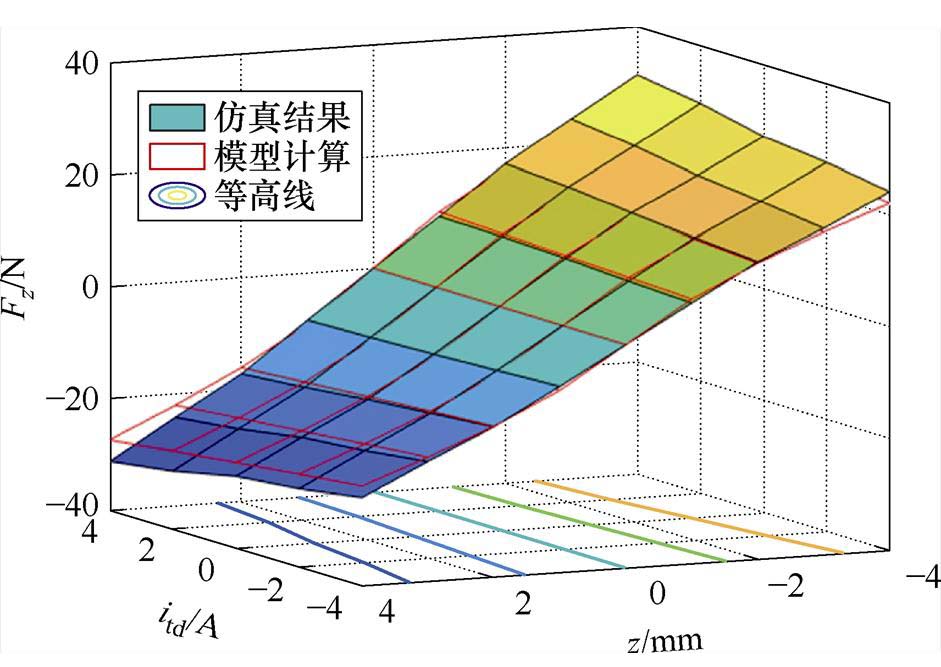
图9 轴向力特性曲面(仿真)
Fig.9 Axial force characteristic surface (simulation)
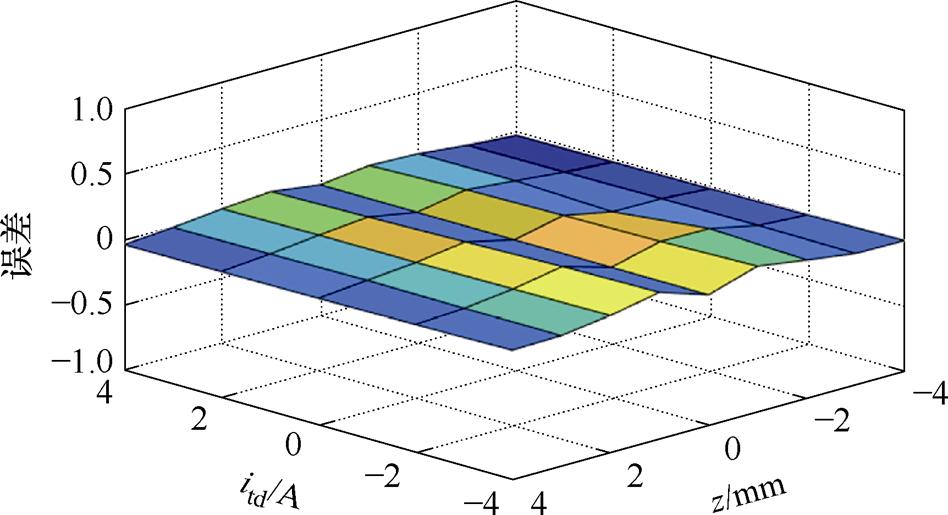
图10 轴向力误差曲面(仿真)
Fig.10 Axial force error surface (simulation)
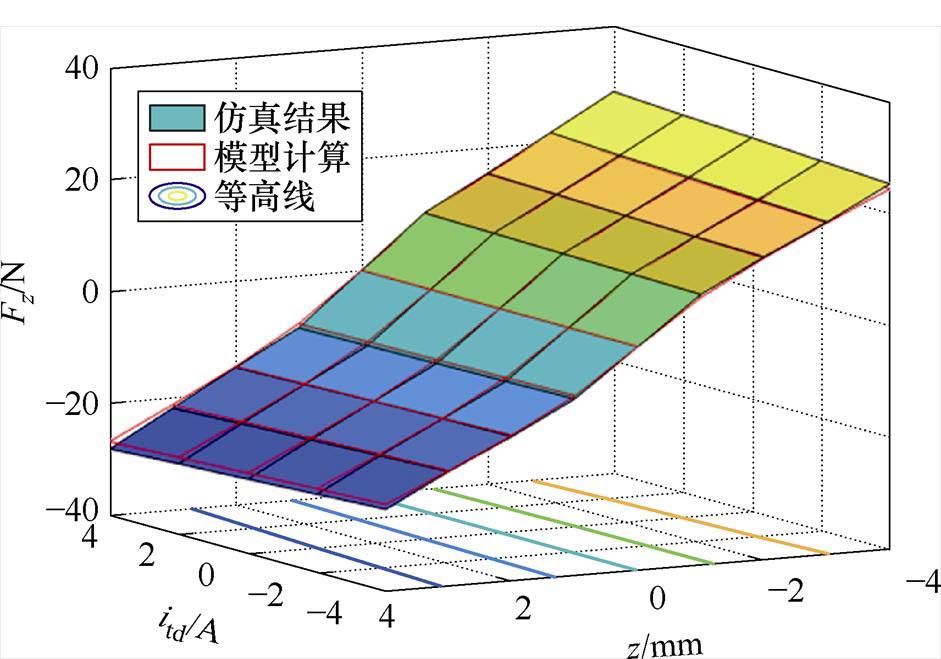
图11 轴向力特性曲面(实验)
Fig.11 Axial force characteristic surface (experiment)
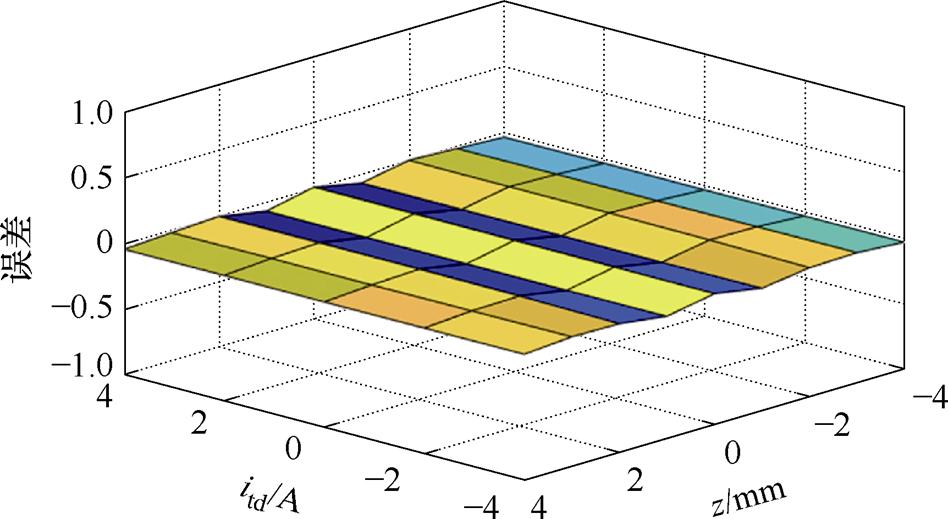
图12 轴向力误差曲面(实验)
Fig.12 Axial force error surface (experiment)
由于BPMSM轴向的被动悬浮结构,其弱轴向刚度特性会使转子在受到轴向扰动或者负载切换时发生振动。为了提高其轴向稳定性以及抗扰能力,本节将对轴向力模型式(10)进行简化,并根据其动态特性提出一种基于刚度调节的轴向控制策略。在不增加额外的永磁材料和控制绕组的情况下实现对轴向振动的抑制。
通过第2节仿真分析可以发现,当轴向位移较小时,轴向力与轴向位移成正比关系;当轴向位移不变时,轴向力与直轴电枢电流也近似呈线性关系。因此考虑对轴向力表达式进行化简。由于电机机械结构限制以及轴向回复力的作用,薄片转子的轴向位移一般最大不会超过4 mm,因此z是一个接近于0的变量。将式(10)在z=0处泰勒展开,并忽略高次项的影响,可以简化得到轴向力与轴向位移和直轴电枢电流的关系为
 (11)
(11)
其中
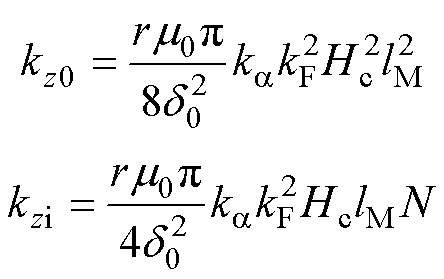
式中,kz0为原始轴向力刚度;kzi为附加直轴电枢电流对轴向力刚度的影响系数;kz0+kziitd为考虑绕组电流影响的新轴向力刚度,等于原始轴向力刚度与附加轴向力刚度之和。
当直轴电枢电流等于零时,轴向力的位移刚度等于kz0。当电流大于零时,附加轴向力刚度大于零,轴向力随之增大。当电流小于零时,与之相反。因此,可以通过合理地调节直轴电枢电流,实现对BPMSM轴向力刚度及轴向力的控制。想要抑制转子的振动,需要使得电流提供的附加轴向力具有阻尼特性,因此将电流给定设计成与转子轴向运动速度成比例的调节器,其附加直轴电枢电流调节公式为
 (12)
(12)
式中, 为附加直轴电枢电流给定值;kD为电流调节系数。
为附加直轴电枢电流给定值;kD为电流调节系数。
基于式(12),本文提出一种根据转子轴向位移自动调节轴向力刚度的永磁型无轴承薄片电机改进型控制策略,其控制框图如图13所示。该控制策略在转矩绕组和悬浮绕组采用基于磁场定向的矢量解耦控制策略基础上[24],增加了轴向位移反馈信号,并引入轴向力刚度调节控制环节:当转子轴向受到扰动或负载切换时,通过对转子轴向位移的采样来控制电流itd,以调节轴向力刚度,实现对轴向位移的稳定控制。虽然的引入可能会对原有转矩控制系统的直轴励磁磁场有一定影响,但对于隐极式转子结构而言,这部分电励磁直轴电枢电流远小于永磁体等效电流。而且,在本方案中,附加直轴电枢电流只在转子发生轴向位移振动时产生,作用时间很短,因此对转子旋转速度影响很小。同时,由于永磁无轴承薄片电机转子特有的薄片结构,使得径向悬浮力受轴向位移变化不大,所以对原有径向悬浮控制系统的影响也可以忽略不计。
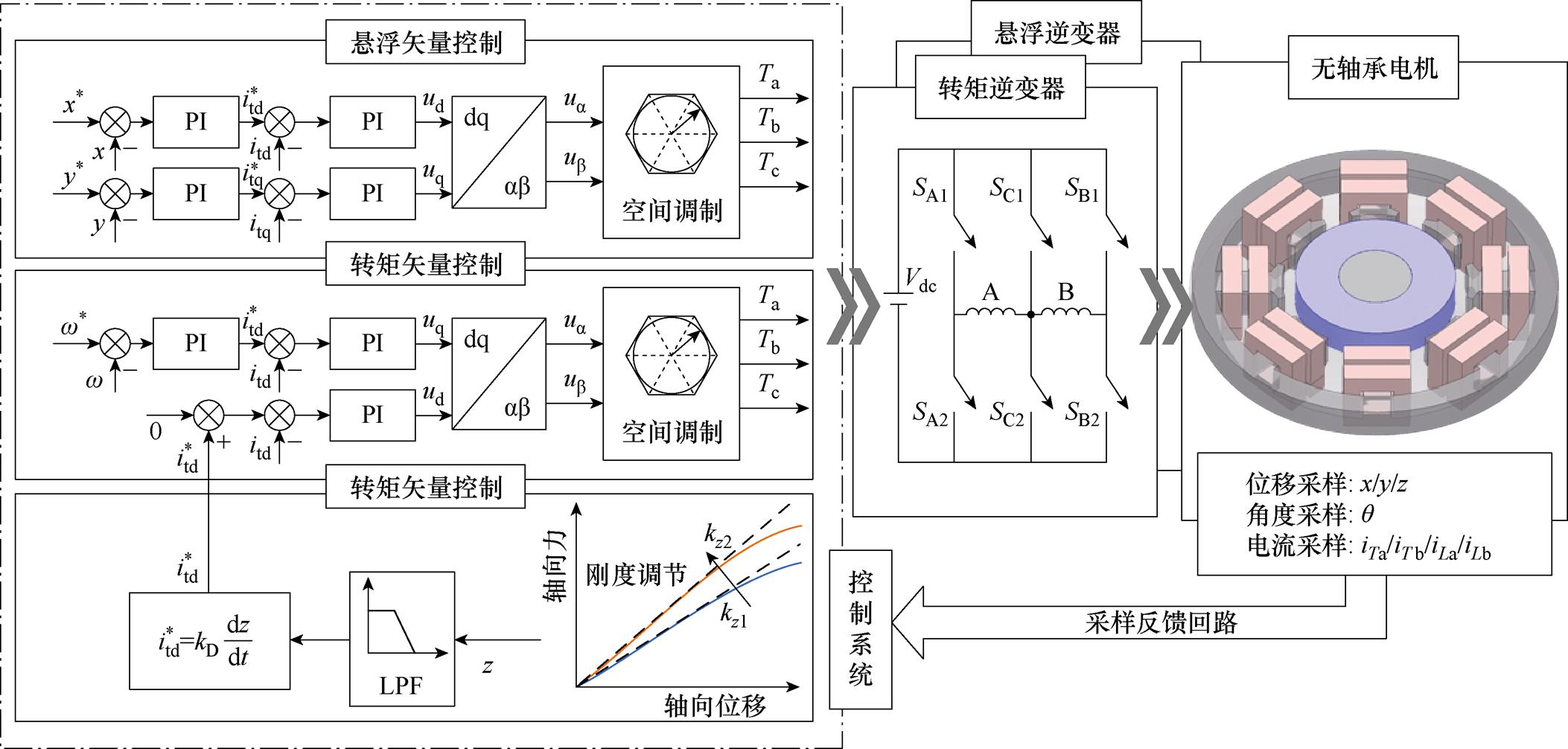
图13 轴向力刚度调节控制框图
Fig.13 Axial force stiffness adjustment control diagram
为验证本文所提轴向力刚度调节策略的有效性,以轴向负载突变情况下的轴向位移轨迹和控制电流为对象进行仿真验证。
先给转子施加一个25 N的轴向负载力,转子稳定在轴向偏移3.5 mm的位置,在0.1 s时突卸负载,转子位移波形如图14所示。橙色虚线为原系统轴向位移波形,在突卸负载后转子在轴向上发生振动,振动频率约27 Hz,约4.9 s后恢复稳定。蓝色实线为采用刚度调节策略后的轴向位移波形,调节时间约1.64 s,比原系统缩短了66.5%。附加直轴电枢电流为位移的负导数,在第一次振荡时达到最大调节电流5.65 A,之后随轴向振动的幅值减小而减小。当位移平稳后,电流也恢复到零。
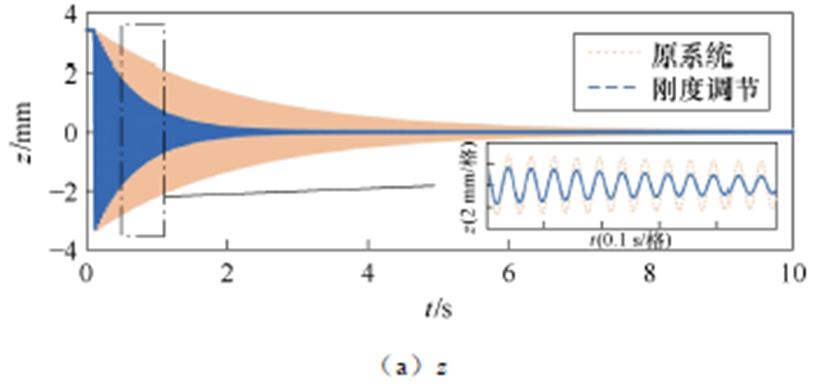
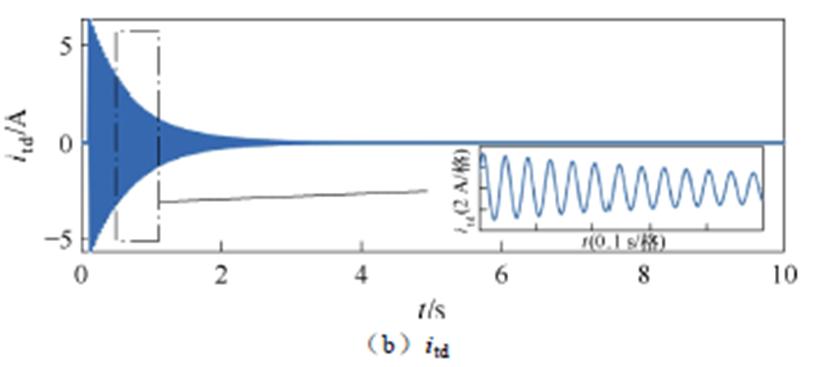
图14 轴向负载突变仿真
Fig.14 Axial load change simulation
图15为不同负载下的轴向力刚度调节过程。表2为不同负载下的调节时间。与电流调节过程一致,轴向力刚度随轴向位移导数变化,最终趋于稳定时,轴向力刚度恢复原始轴向力刚度kz0。原系统轴向位移振动衰减的调节时间几乎不随负载变化。采用本文所提的控制策略后,振动的调节时间都有不同程度地减小。
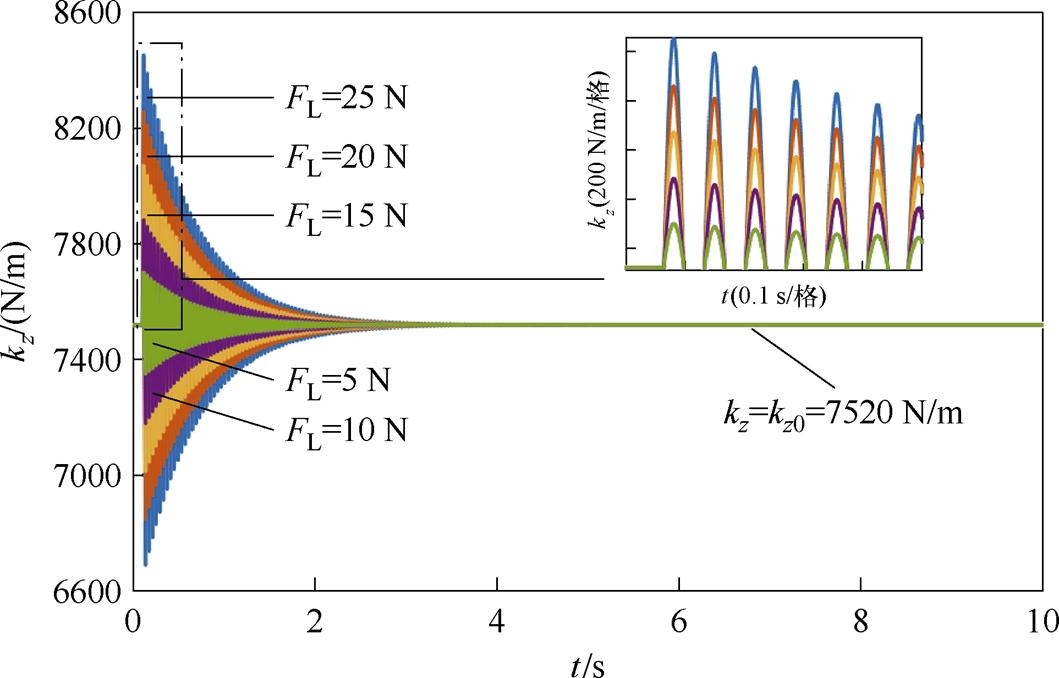
图15 不同负载下刚度调节过程
Fig.15 Stiffness regulation in different load conditions
表2 不同负载下调节时间
Tab.2 Adjustment time in different load conditions
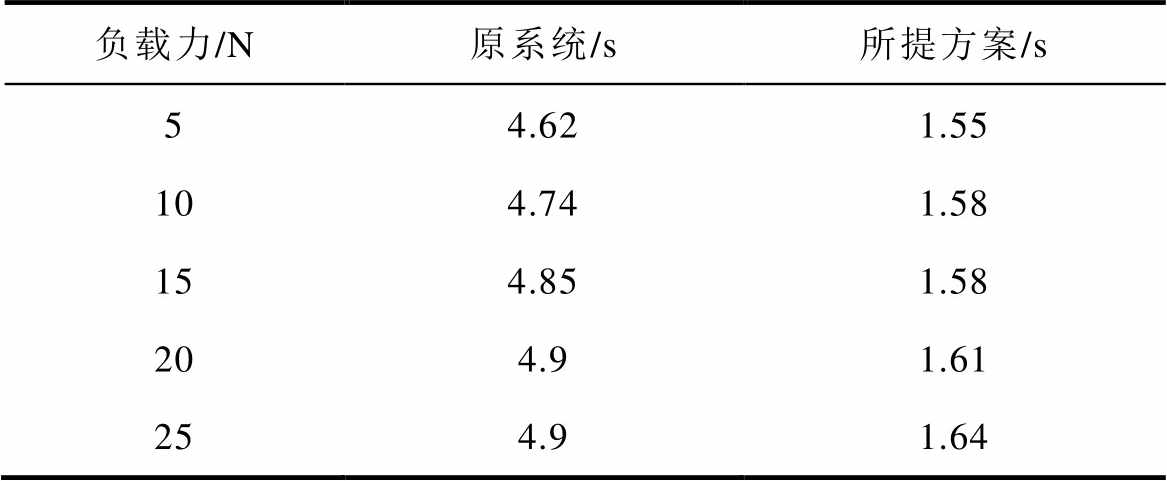
负载力/N原系统/s所提方案/s 54.621.55 104.741.58 154.851.58 204.91.61 254.91.64
图16为BPMSM实验平台以及轴向加载平台。通过滑轮传动,用不同重力的砝码模拟无轴承电机转子轴向负载。本文基于一台5 000 r/min/150 W实验样机进行轴向切换负载实验,电机本体结构参数与表1一致。
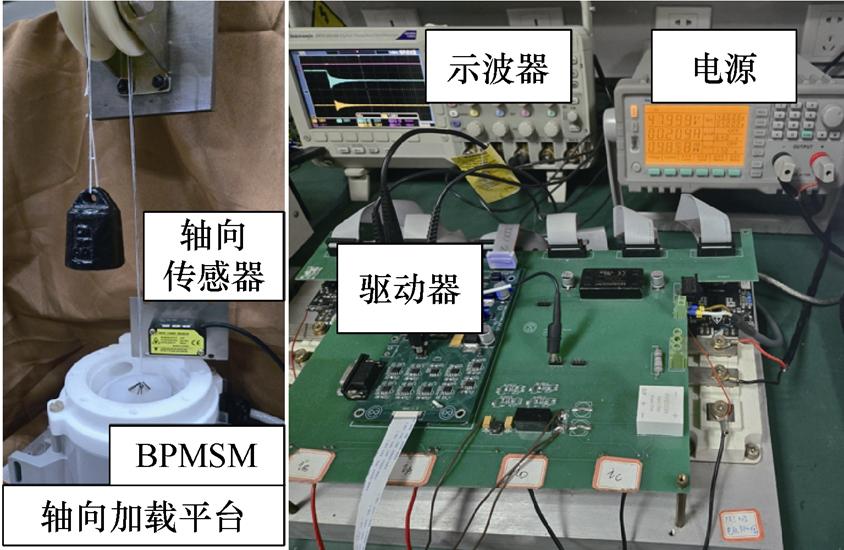
图16 永磁型无轴承薄片电机实验平台
Fig.16 Platform of BPMSM
首先,给转子施加22 N的轴向负载力,在1 s时卸去负载。图17为不采用控制策略的转子轴向位移波形,绿色为轴向位移波形,蓝色为直轴电枢电流波形。开始时,转子稳定在轴向偏移3 mm的位置,突卸负载后,转子在轴向产生振动,约6.5 s后趋于稳定。图18为采用刚度调节策略下的轴向位移和电流波形。直轴电枢电流为位移的导数,也呈幅值逐渐衰减的正弦波形式,最大幅值约为4 A,当转子轴向稳定时,调节电流也趋于0 A。从突卸负载到转子轴向稳定仅用1.3 s,比采用刚度调节策略前缩短81.5%。与仿真结果相比,转子轴向振动频率同样为27 Hz,转子振动衰减时间也相近似。
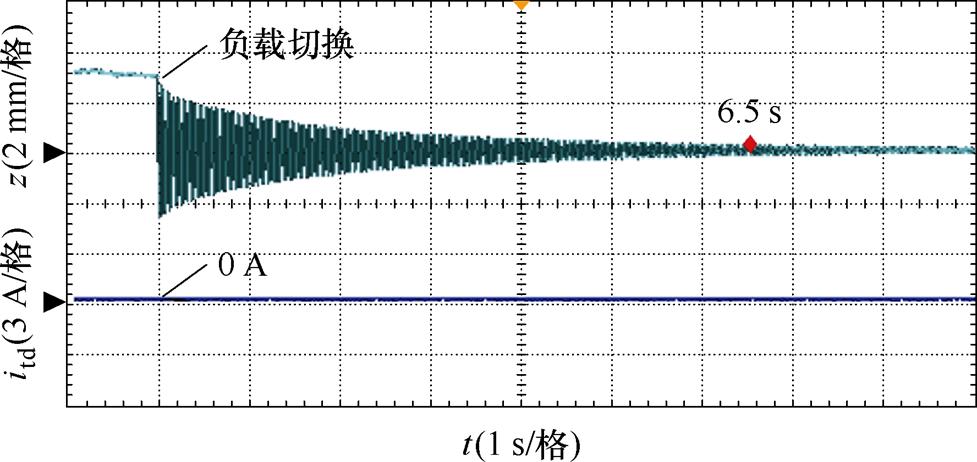
图17 轴向位移波动(不采用控制策略)
Fig.17 Axial displacement (without control scheme)
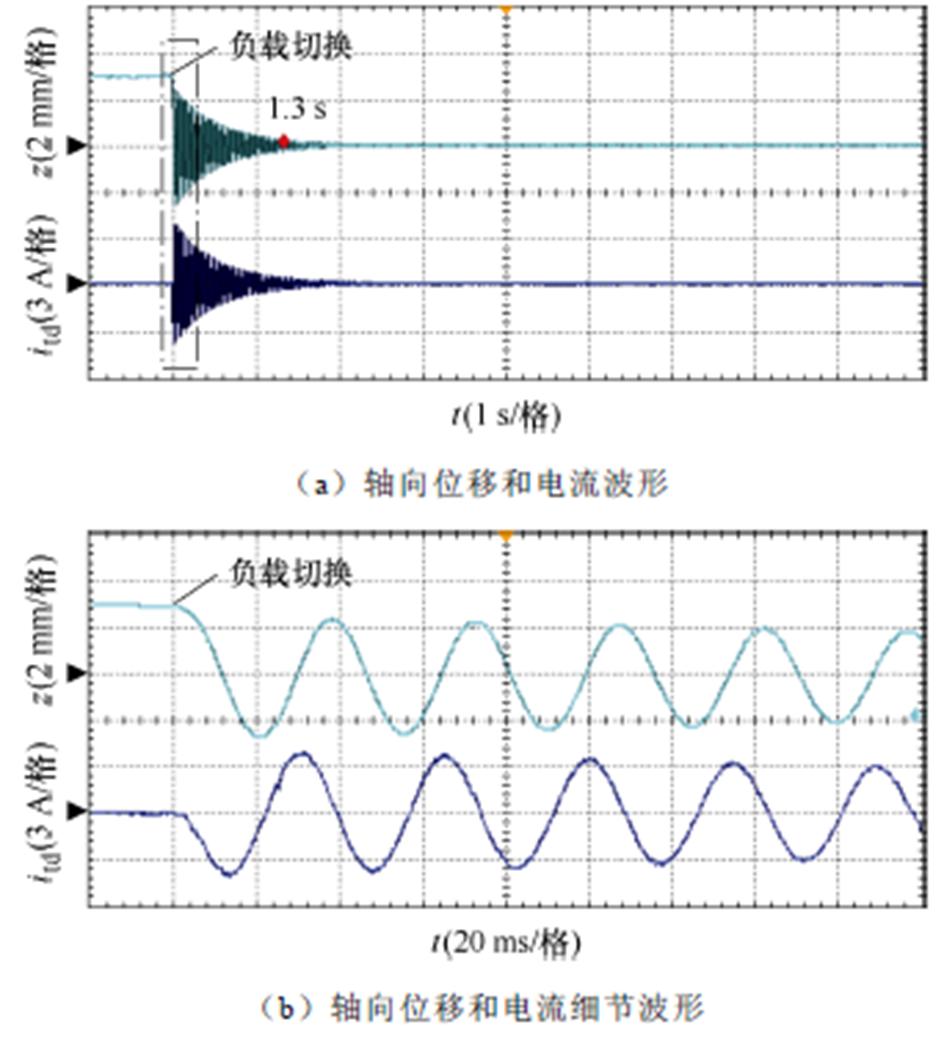
图18 轴向力刚度调节方案下的位移和电流波形
Fig.18 Axial displacement and current waveforms with axial force stiffness adjustment scheme
图19为无轴承电机旋转过程中的轴向突变载实验,所提轴向力刚度调节方案依然能够有效抑制转子的轴向振动。图20为转速傅里叶分析结果,转速中有少量轴向振动同频和倍频分量。图21给出轴向控制策略下转子径向悬浮的位移波形,切换负载后转子径向位移约30 mm,是由轴向变载过程导致的。证明了所提控制策略对电机的旋转以及悬浮性能几乎没有影响。上述实验结果验证了本文所提控制策略能在不影响BPMSM原本的结构以及运行性能的情况下,有效地提高永磁型无轴承薄片电机的轴向稳定性与抗扰能力。
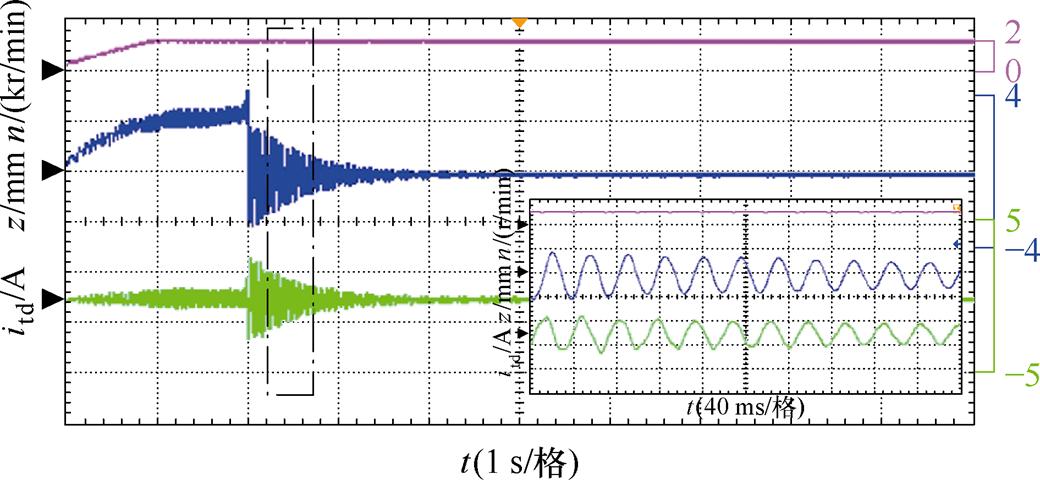
图19 轴向力刚度调节方案旋转实验
Fig.19 Rotation experiment of axial force stiffness adjustment scheme
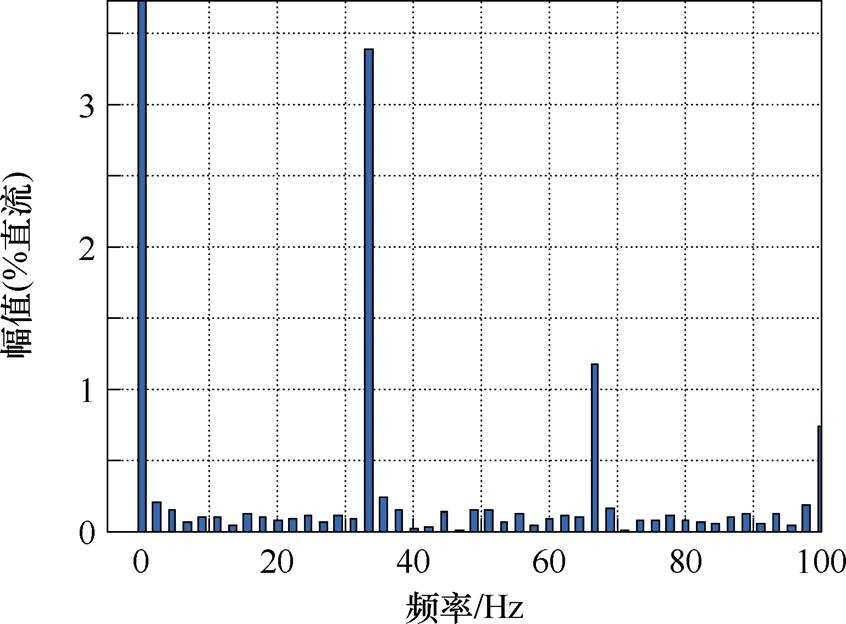
图20 转速傅里叶分析
Fig.20 Fourier analysis of rotational speed
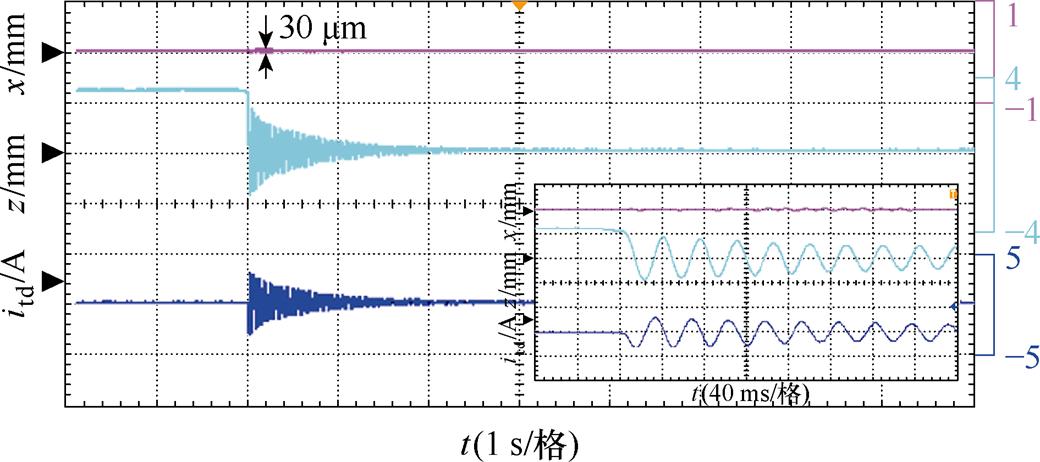
图21 轴向力刚度调节方案悬浮实验
Fig.21 Levitation experiment of axial force stiffness adjustment scheme
永磁型无轴承薄片电机轴向因被动悬浮结构而具有弱刚度特性。为提高转子的轴向稳定性以及抗扰能力,本文建立了轴向力数学模型,提出一种刚度调节方案以实现对转子轴向运动的控制,并对轴向力的动静态特性关系进行分析。主要工作如下:
1)基于磁路等效模型建立BPMSM轴向力数学模型。在电机结构方面,轴向力主要与气隙长度、转子半径以及永磁体磁化长度等参数有关。在运行过程中,轴向力方向与轴向位移方向相反,幅值随着轴向位移的增大而增大。随着位移的增大,轴向力增大的幅度逐渐减小。直轴电枢电流大于零,轴向力增大;反之,则相反。电流较小时,轴向力的变化幅度与电流的绝对值成正比。
2)通过Ansys有限元仿真和实验测试验证本文建立的轴向力数学模型的准确性,在位移电流变工况下,模型与仿真误差不超过9.39%,模型与实验误差不超过7.5%。
3)根据轴向力、轴向力刚度与轴向位移和直轴电枢电流之间的关系,本文提出一种通过控制直轴电枢电流来调节轴向力刚度的策略,以提高薄片转子轴向悬浮的稳定性与抗扰能力。
4)基于一台无轴承实验样机进行轴向突变载仿真与实验,验证了所提的轴向刚度调节控制方案能够在电机运行过程中有效抑制转子的轴向振动,振动衰减的调节时间缩短约66.5%。
参考文献
[1] Bao Xucong, Wang Xiaolin, Han Bingyang, et al. Eccentricity compensation for bearingless motor based on the tracking of the minimum antieccentric levitation current[J]. IEEE Transactions on Industrial Electronics, 2024, 71(4): 3494-3503.
[2] 王晓琳, 石滕瑞, 鲍旭聪. 基于频域拟合的无轴承永磁薄片电机径向悬浮力建模分析[J]. 电工技术学报, 2023, 38(2): 317-329.
Wang Xiaolin, Shi Tengrui, Bao Xucong. Accurate mathematical modeling of radial suspension force on bearingless permanent magnet slice motors based on frequency domain fitting[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 317-329.
[3] 李健, 陈红, 李大伟, 等. 高速高功率密度无轴承永磁薄片电机设计与优化[J]. 电机与控制学报, 2024, 28(6): 171-180.
Li Jian, Chen Hong, Li Dawei, et al. Design and optimization of bearingless permanent magnet slice motors for high speed and high power density applications[J]. Electric Machines and Control, 2024, 28(6): 171-180.
[4] Kant K, Trumper D L. Extracorporeal blood pump driven by a novel bearingless split-tooth flux-reversal motor[J]. IEEE/ASME Transactions on Mechatronics, 2024, 29(1): 271-278.
[5] Sun Xiaodong, Chen Long, Yang Zebin. Overview of bearingless permanent-magnet synchronous motors[J]. IEEE Transactions on Industrial Electronics, 2013, 60(12): 5528-5538.
[6] 仇志坚, 马东旭, 魏康妮. 无轴承无刷直流电机悬浮控制特性优化分析[J]. 电工技术学报, 2019, 34(23): 4939-4947.
Qiu Zhijian, Ma Dongxu, Wei Kangni. Optimization analysis on suspension control characteristics of a bearingless brushless DC motor[J]. Transactions of China Electrotechnical Society, 2019, 34(23): 4939- 4947.
[7] 禹春敏, 邓智泉, 梅磊, 等. 基于精确磁路的新型混合型轴向-径向磁悬浮轴承研究[J]. 电工技术学报, 2021, 36(6): 1219-1228.
Yu Chunmin, Deng Zhiquan, Mei Lei, et al. Research of new hybrid axial-radial magnetic bearing based on accurate magnetic circuit[J]. Transactions of China Electrotechnical Society, 2021, 36(6): 1219-1228.
[8] Pei Tonghao, Li Dawei, Liu Jiayun, et al. Review of bearingless synchronous motors: principle and topo- logy[J]. IEEE Transactions on Transportation Elec- trification, 2022, 8(3): 3489-3502.
[9] Bao Xucong, Wang Xiaolin, Li Zhenglong, et al. Optimized design of levitation current regulator for bearingless motor[J]. IEEE Transactions on Power Electronics, 2023, 38(12): 15481-15493.
[10] 丁伟成. 离心泵与轴流泵: 原理及水力设计[M]. 北京: 机械工业出版社, 1981.
[11] 徐博远. 片状转子磁悬浮关键技术研究[D]. 南京: 南京航空航天大学, 2023.
Xu Boyuan. Research on key technology of magnetic levitation of sheet rotor[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2023.
[12] Sugimoto H, Uemura Y, Chiba A, et al. Design of homopolar consequent-pole bearingless motor with wide magnetic gap[J]. IEEE Transactions on Magnetics, 2013, 49(5): 2315-2318.
[13] Puentener P, Hoffmann F, Menzi D, et al. Homopolar bearingless slice motor in temple design[C]//2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 2017: 1-7.
[14] Asama J, Asami T, Imakawa T, et al. Effects of permanent-magnet passive magnetic bearing on a two-axis actively regulated low-speed bearingless motor[J]. IEEE Transactions on Energy Conversion, 2011, 26(1): 46-54.
[15] Fang Jiancheng, Le Yun, Sun Jinji, et al. Analysis and design of passive magnetic bearing and damping system for high-speed compressor[J]. IEEE Transa- ctions on Magnetics, 2012, 48(9): 2528-2537.
[16] Sugimoto H, Tanaka S, Chiba A, et al. Principle of a novel single-drive bearingless motor with cylindrical radial gap[J]. IEEE Transactions on Industry Appli- cations, 2015, 51(5): 3696-3706.
[17] Sugimoto H, Tanaka S, Chiba A. A vibration redu- ction method of one-axis actively position regulated single-drive bearingless motor with repulsive passive magnetic bearings[J]. IEEE Transactions on Industry Applications, 2016, 52(1): 181-188.
[18] 武谷雨. 轴向主动控制无轴承电机基础研究[D]. 南京: 南京航空航天大学, 2017.
Wu Guyu. Basic research on axial actively regulated bearingless motor[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017.
[19] Wang Zelin, Cao Xin, Deng Zhiquan, et al. High integrated methodology and evaluation for switched- reluctance type bearingless motors with five degree of freedom magnetic levitation[J]. IEEE Transactions on Energy Conversion, 2023, 38(2): 759-770.
[20] Asama J, Hamasaki Y, Oiwa T, et al. Proposal and analysis of a novel single-drive bearingless motor[J]. IEEE Transactions on Industrial Electronics, 2013, 60(1): 129-138.
[21] 秦伟, 马育华, 张洁龙, 等. 不均匀气隙工况下轴向磁通永磁电动式磁悬浮电机的磁场与力特性分析[J]. 电工技术学报, 2023, 38(4): 889-902.
Qin Wei, Ma Yuhua, Zhang Jielong, et al. Characteristic and magnetic field analysis of an axial flux permanent magnets maglev motor with non-uniform air gap[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 889-902.
[22] 佟文明, 杜绍雨, 贾建国, 等. 基于改进复相对磁导函数的开槽轴向磁通永磁电机气隙磁场解析模型[J]. 电工技术学报, 2024, 39(24): 7700-7711.
Tong Wenming, Du Shaoyu, Jia Jianguo, et al. Analytical model of air-gap magnetic field of slotted axial flux permanent magnet motor based on improved complex relative permeance function[J]. Transactions of China Electrotechnical Society, 2024, 39(24): 7700-7711.
[23] Ding Qiang, Deng Zhiquan, Wang Xiaolin, et al. Principle and design of a novel Lorenz force type bearingless motor with single-axis actively regulated capability[J]. Journal of Electrical Engineering and Technology, 2016, 11(5): 1253-1264.
[24] 赵攀, 王宇, 张艺. 单霍尔故障下无轴承永磁薄片电机径向位移容错检测[J]. 电工技术学报, 2024, 39(15): 4794-4805.
Zhao Pan, Wang Yu, Zhang Yi. Fault tolerant dete- ction of radial displacement of bearingless permanent magnet slice motor under single hall fault[J]. Transactions of China Electrotechnical Society, 2024, 39(15): 4794-4805.
Abstract The load form of the bearingless permanent magnet slice motor (BPMSM) is complex and changeable. For example, during the operation of the magnetic suspension pump, the imbalance of the force acting on the surface of the impeller by the liquid flow causes the rotor to produce displacement or torsion in the axial direction. According to the principle of minimum reluctance, axial force and axial torque are generated between the stator and the rotor. However, the axial passive levitation structure has weak axial force stiffness, and its stability is insufficient. Therefore, this paper establishes a mathematical model of the axial force and analyzes its dynamic and static characteristics. A stiffness adjustment scheme is proposed to control the axial motion of the rotor. Finally, the effectiveness of the proposed axial force stiffness control strategy is verified by simulation and experiment.
(1) The magnetic circuit equivalent model of BPMSM is established, including the stator magnetic circuit, the air gap magnetic circuit, and the rotor magnetic circuit. Considering the influence of winding current, the expression for the rotor axial passive levitation force is derived using the virtual work method.
(2) The influencing factors of axial force are analyzed through the mathematical model and finite element simulation. In a specific range, the axial force of BPMSM is inversely proportional to the length of the air gap, and the axial force is proportional to the rotor radius and the magnetization length of the permanent magnet. The axial force direction of BPMSM is opposite to the axial displacement direction, and the amplitude increases with the increase of axial displacement. With the rise in displacement, the increment in the axial force amplitude gradually decreases. When the current of the direct axis armature is greater than zero, the axial force increases, and vice versa. When the current is small, the change in the axial force amplitude is proportional to the absolute value of the current. The accuracy of the mathematical model of axial force established in this paper is verified by finite element simulation and experiment. Under the full working conditions of displacement and current, the error between the established model and simulation is less than 9.39%, and the error between the established model and experiment is less than 7.5%.
(3) According to the characteristic relationship between axial force and d-axis armature current, an axial force stiffness regulation strategy is proposed to enhance axial suspension stability and disturbance immunity. Firstly, according to the simplified axial force model, a new axial force stiffness expression is obtained. Then, by adjusting the relationship between the armature current and the rotor vibration velocity, the damping force is generated to restrain the rotor axial vibration. Its implementation does not require additional structure or control winding. The simulation and experiment of BPMSM show that the axial control scheme based on stiffness regulation can effectively suppress axial vibration caused by disturbances or load changes and shorten the adjustment time for vibration attenuation.
Keywords:Bearingless permanent magnet slice motor (BPMSM), axial force, mathematical model, stiffness regulation, characteristic analysis
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.250301
国家自然科学基金(52177048)和江苏省自然科学基金(BK20201297)资助项目。
收稿日期 2025-02-26
改稿日期 2025-03-19
李正龙 男,2000年生,博士研究生,研究方向为无轴承电机系统及其控制。
E-mail: lizhenglong@nuaa.edu.cn
王晓琳 男,1976年生,教授,博士生导师,研究方向为永磁电机、无轴承电机、高速电机及其控制。
E-mail: wangxl@nuaa.edu.cn(通信作者)
(编辑 崔文静)