 为电机的电磁角速度。S1~S6为逆变器开关器件,上下桥臂开关状态互补。上桥臂开关状态所对应的逆变器输出电压矢量在空间中的分布情况如图2所示。
为电机的电磁角速度。S1~S6为逆变器开关器件,上下桥臂开关状态互补。上桥臂开关状态所对应的逆变器输出电压矢量在空间中的分布情况如图2所示。摘要 配备LC滤波器的永磁同步电机系统可以缓解电机侧过电压问题,延长电机寿命。而常规的模型预测控制在每个控制周期内只输出一个最优电压矢量,导致开关频率变化和电流纹波大。该文提出一种分段误差最优化预测电流控制来解决这些问题。首先,采用了对称三矢量序列,以实现固定开关频率。其次,基于电感电流梯度建立了电感电流轨迹预测模型,并设计了一种基于分段电流参考跟踪误差的二次型价值函数,旨在最小化电感电流全局参考跟踪误差,改善系统的稳态性能。然后,通过在价值函数中嵌入有源阻尼分量,实现了系统谐振的主动抑制。最后,通过实验验证了所提算法的有效性。
关键词:LC滤波器 永磁同步电机 轨迹预测模型 分段误差 谐振抑制
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)系统因其具有结构紧密、过载能力强和动态响应快等优点,被广泛应用于工业自动化、深井开采和轨道交通等领域[1-3]。目前,通常采用基于脉宽调制(Pulse Width Modulation, PWM)策略的电压源型逆变器(Voltage Source Inverter, VSI)进行驱动,实现了优异的变频调速性能。然而,输电线缆的行波反射效应会导致PWM波在电机侧产生过电压的问题,损坏电机绝缘,威胁电机的安全运行[4]。特别是随着宽禁带材料碳化硅和氮化镓的发展,更高的开关速度致使该问题日益严峻[5]。
逆变器输出侧配备LC滤波器的永磁同步电机(LC-PMSM)系统,可以将方波脉冲电压过滤成近似正弦波,从而缓解电机侧过电压的问题,并且可以进一步降低电机谐波,减小系统损耗[6]。然而由于LC滤波器的嵌入,导致系统阶数升高,容易引发谐振失稳问题[7]。早期常采用物理电阻直接与LC滤波器串/并联连接的无源阻尼方案来抑制谐振,其操作简单且谐振抑制效果显著[8]。尽管如此,无源阻尼方案不可避免地会增大系统损耗,降低系统效率[9]。近年来,在主控制回路中额外增加阻尼抑制环路的有源阻尼算法,以其无功率损耗的优点成为目前主流的解决方案[10]。其中,一类方法是在控制算法中添加数字滤波器,实现特定谐振频率的提取和抑制[11-12],但是谐振抑制性能受制于数字滤波器参数设置的准确性;另一类方法则是利用系统各个状态变量构造阻尼环路,可实现宽频谐振抑制。文献[13-14]均采用了电容电流反馈的有源阻尼策略,但电容电流精确提取存在着一定的困难。文献[15]提出了一种基于电机电流反馈的有源阻尼策略,模拟了在电机电感上并联虚拟阻抗的形式来抑制系统谐振。文献[16]则利用电流环输出参考电压估计出电容电流,然后注入定子电流参考中实现谐振抑制。上述方法控制参数众多,且参数间互相耦合,造成了整定工作量大的问题。
模型预测控制(Model Predictive Control, MPC)具有概念直观、操作简单、易于集成多目标优化等优点[17],为LC-PMSM系统提供了另一种控制方案。文献[18]设计了一种基于电机定子电流的预测控制,但设计过程忽略了系统谐振影响,导致该方案不具备通用性。进一步地,文献[19]考虑了系统固有谐振问题,并研究了不同状态反馈下MPC的谐振抑制性能。文献[20]提出了一种基于多目标优化的有限集控制方案,通过对LC-PMSM电感电流、电容电压和定子电流同时进行控制,实现了系统稳定运行。但是引入了多个权重系数,参数选取过程较为复杂。文献[21-22]为了解决有限集MPC稳态性能差的问题,分别采用了长时域和多步长的控制方法,其核心思想均是通过建立更长时间尺度的预测模型,来提高预测精度,实现系统稳态性能提升。但是这类方法计算复杂度较高,需要依赖高性能处理器,这无疑增加了应用成本。上述基于LC-PMSM系统的MPC策略均存在开关频率不固定、电流谐波频谱分散等问题,对LC滤波器的设计并不友好。此外,往往需要提高控制频率,才能获得令人满意的稳态性能。
针对上述问题,本文提出一种分段误差最优化预测电流控制(Segmented Error Optimization Predi- ctive Current Control, SEO-PCC)。首先,采用了对称三矢量序列,实现了恒定的系统开关频率。其次,基于电感电流梯度建立电感电流轨迹预测模型,并设计一种基于分段电流参考跟踪误差的二次型价值函数,使得电感电流全局跟踪误差最小,提高了系统稳态性能。然后,通过在价值函数中嵌入有源阻尼分量,实现系统谐振的主动抑制。最后,通过实验验证了所提控制方案具有良好的动稳态性能。
LC-PMSM系统结构如图1所示,图中,Vdc为直流侧母线电压,Cdc为直流侧母线稳压电容,Lf、Cf分别为LC滤波器的滤波电感和滤波电容,via, vib, vic、iLa, iLb, iLc、vsa, vsb, vsc和isa, isb, isc分别为逆变器的三相输出电压、电感电流、电容电压和定子电流。为电机的电磁角速度。S1~S6为逆变器开关器件,上下桥臂开关状态互补。上桥臂开关状态所对应的逆变器输出电压矢量在空间中的分布情况如图2所示。
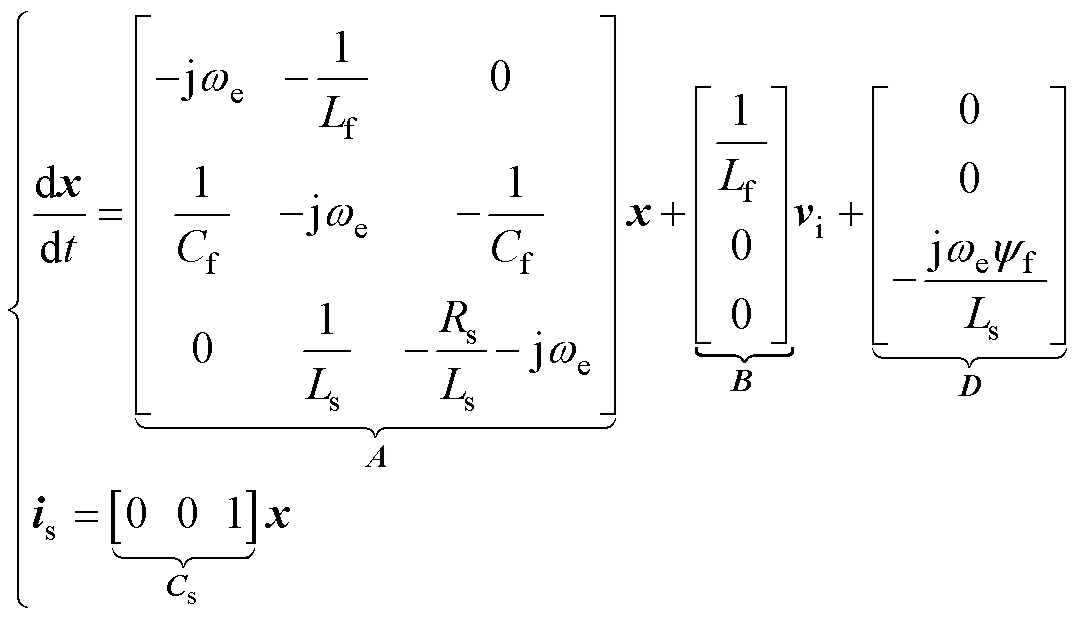
基于图1的系统结构,可建立dq轴同步旋转坐标系下LC-PMSM系统连续时间域的状态空间方程,并用复矢量的形式表示为
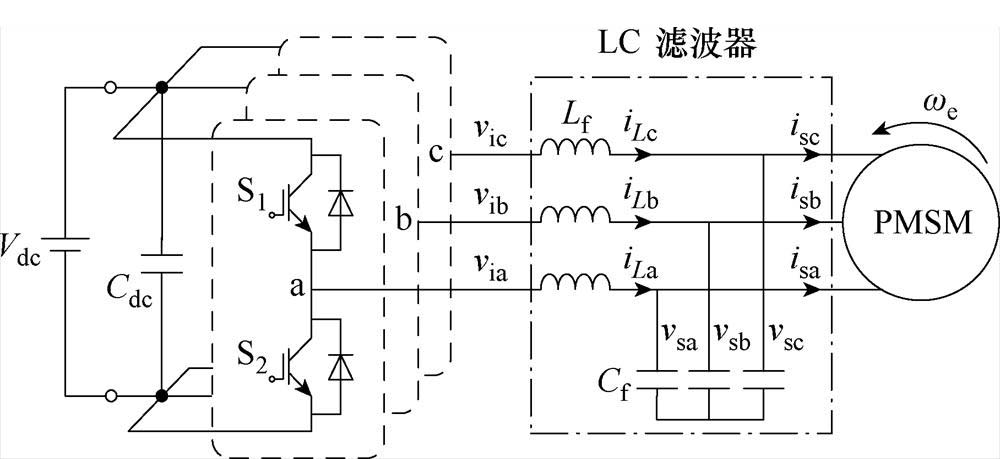
图1 LC-PMSM系统结构
Fig.1 Structure of an LC-PMSM system
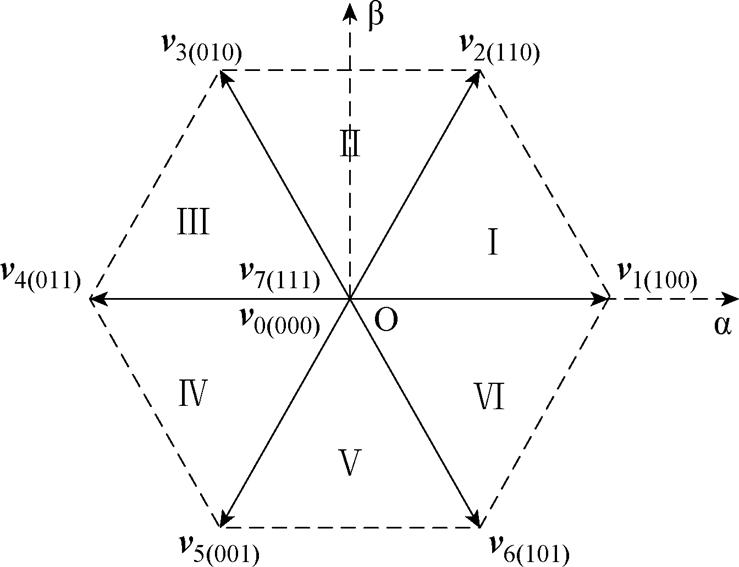
图2 两电平电压源空间矢量分布
Fig.2 Space vector distribution of two-level voltage source
 (1)
(1)
其中
式中,x和vi分别为系统的状态变量和逆变器输出电压;j为虚数单位;Rs、Ls和 分别为电机的定子电阻、定子电感和转子永磁体磁链。
分别为电机的定子电阻、定子电感和转子永磁体磁链。
根据式(1)所示的系统状态方程,可画出系统在dq轴坐标系下的等效电路,如图3所示。
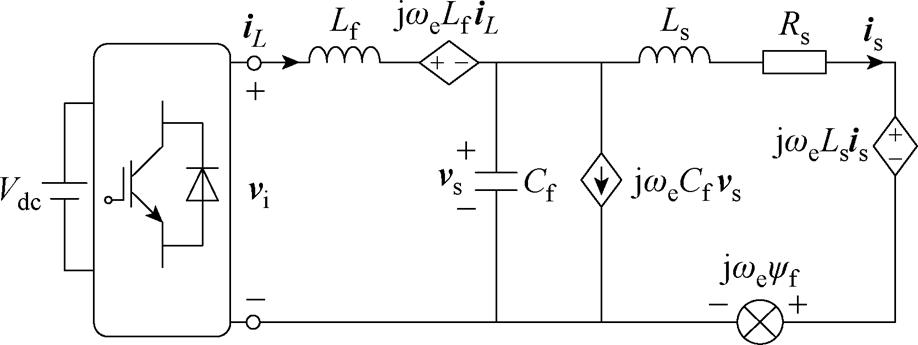
图3 LC-PMSM的dq轴等效电路
Fig.3 dq-axisequivalent circuit of an LC-PMSM
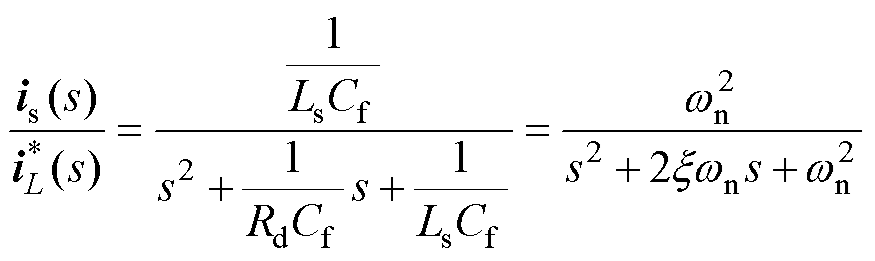
由图3可知,滤波器的电感、电容和定子电感形成了LCL三阶滤波电路。由于电机自身定子电阻提供的无源阻尼效果有限,因此在分析谐振原理时忽略定子电阻以模拟最恶劣的谐振工况。因此,根据式(1)推导的系统状态方程,反电动势 视为扰动,可在dq轴坐标系下建立定子电流的传递函数为
视为扰动,可在dq轴坐标系下建立定子电流的传递函数为
 (2)
(2)
其中
式中,I为单位矩阵;s为拉普拉斯算子; 为系统谐振角频率,有
为系统谐振角频率,有
 (3)
(3)
根据式(2)(相关数据见表2)可以画出关于Gis(s)的Bode图,如图4所示。从图中可以看出,由于LC滤波器的引入,系统阶数增加为3阶,出现了谐振尖峰。此外,由于dq轴交叉耦合项的影响,谐振频率fres会随着电机基频f0的变化而发生一定的偏移,进一步增加了系统的控制难度。
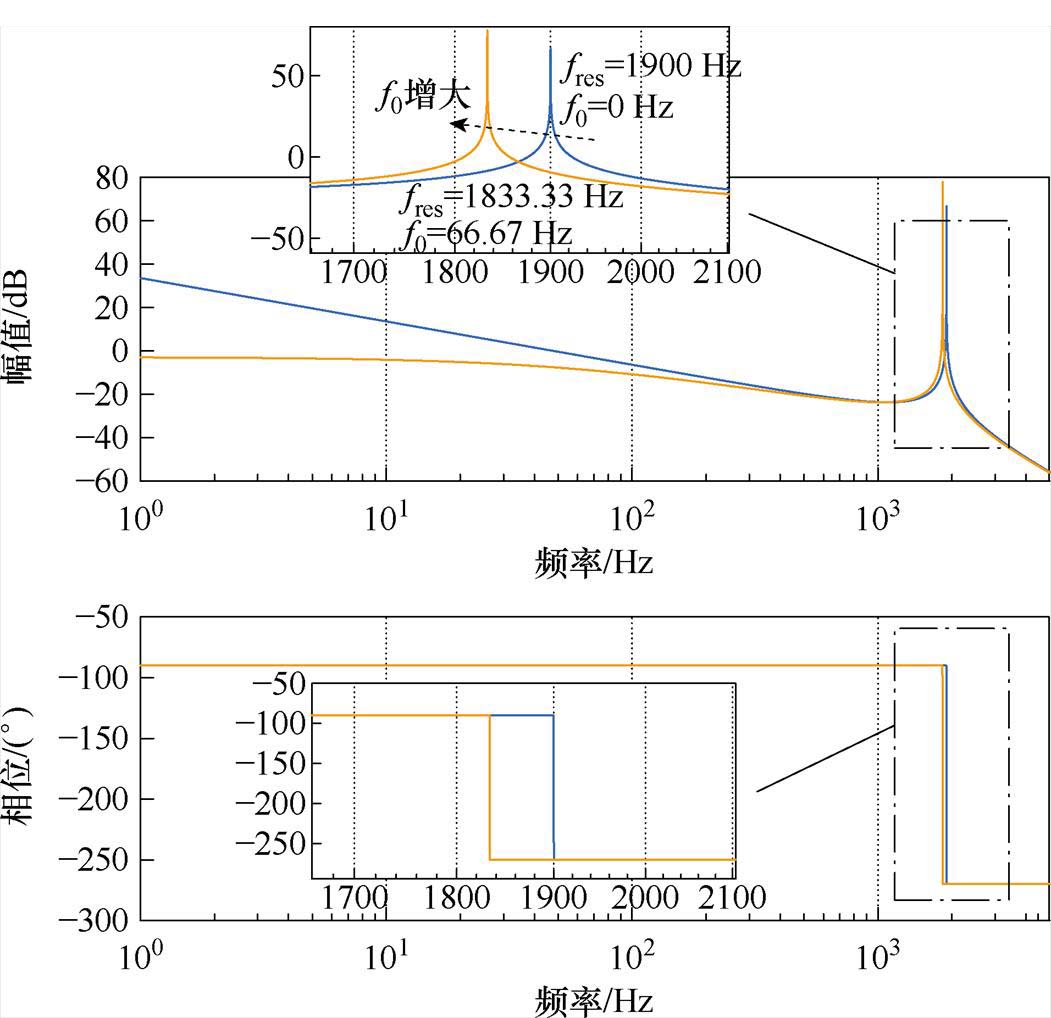
图4 LC-PMSM系统Bode图
Fig.4 Bode plot of LC-PMSM system
文献[20]借助零阶保持器(Zero-Order Hold, ZOH)算法对系统的状态方程进行精确离散化,建立LC-PMSM系统的预测模型,并利用三阶泰勒展开对其系数矩阵进行近似处理,有
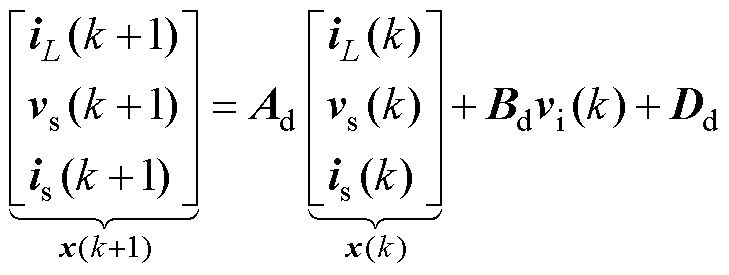 (4)
(4)
式中,x(k+1)和x(k)分别为系统状态变量的预测值和反馈值;Ad、Bd、Dd为系数矩阵,表示为
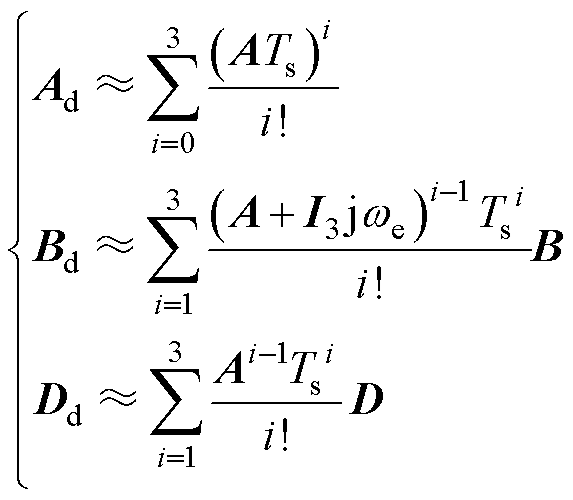 (5)
(5)
式中,Ts为采样时间。
由于预测控制具有多变量控制的优势,文献[20]针对LC滤波型永磁同步电机系统设计了一种三目标价值函数,有
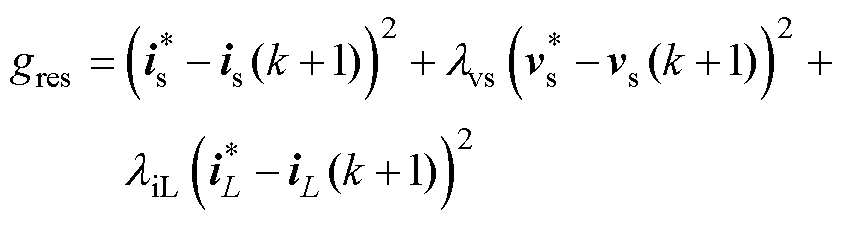 (6)
(6)
其中
式中, 、
、 、
、 分别为定子电流、电容电压和电感电流的参考;lvs和liL分别为电容电压和电感电流跟踪误差项的权重系数。
分别为定子电流、电容电压和电感电流的参考;lvs和liL分别为电容电压和电感电流跟踪误差项的权重系数。
通过评估gres在逆变器各个电压矢量作用下的值,最终选取能够使gres取得最小值的最优电压矢量作用于逆变器开关管。然而,常规MPC开关频率不固定,电流纹波大。通常为了改善稳态性能,往往采用较高的控制频率,这无疑会增加硬件成本。另外,其权重系数设计尚无理论依据,多借助于经验法试凑获得,导致参数整定工作量大。
为了解决上述常规MPC所存在的问题,本文提出了一种分段误差最优化的预测电流控制策略,保证系统运行稳定的同时,实现了开关频率恒定和稳态性能提升。
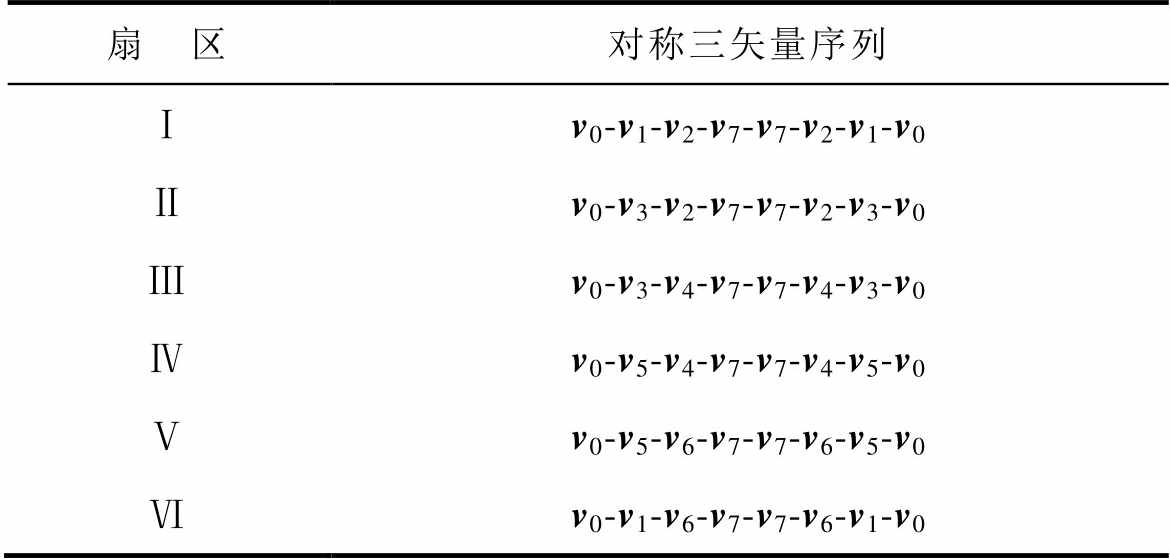
为实现固定的开关频率,本文采用了对称三矢量序列以生成控制脉冲。具体而言,是由各扇区相邻的两个有效矢量和一个零矢量作为基本电压矢量组成。并按时间尺度将一个控制周期平均划分为两个子时间序列,两个子序列中矢量作用顺序为镜像对称关系,即第一个子序列作用的最后一个电压矢量与第二个子序列作用的第一个电压矢量相同,即可确保开关频率的固定。不同扇区所对应的对称三矢量序列情况见表1。
表1 不同扇区所对应的三矢量序列
Tab.1 The three vector sequence corresponding to different sectors
扇 区对称三矢量序列 Ⅰv0-v1-v2-v7-v7-v2-v1-v0 Ⅱv0-v3-v2-v7-v7-v2-v3-v0 Ⅲv0-v3-v4-v7-v7-v4-v3-v0 Ⅳv0-v5-v4-v7-v7-v4-v5-v0 Ⅴv0-v5-v6-v7-v7-v6-v5-v0 Ⅵv0-v1-v6-v7-v7-v6-v1-v0
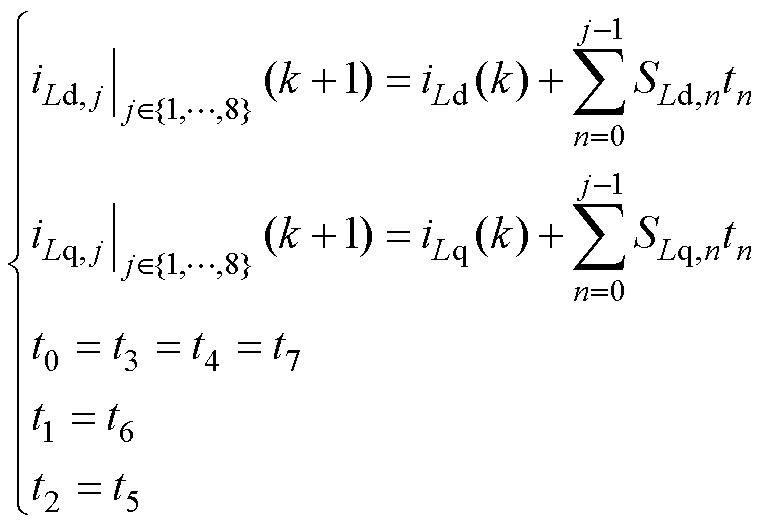
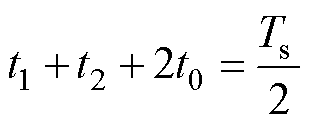
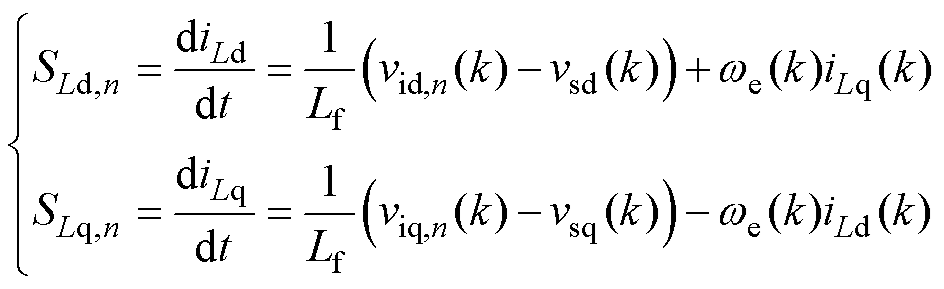
预测控制是借助于系统数学模型进行控制,所以建立合适的预测模型是发挥预测控制优异性能的关键。因此,本文依据上述对称三矢量序列的设计思想,为了预测出电感电流在未来一个控制周期内的变化行为,在dq轴坐标下建立了一种考虑控制周期内随矢量序列变化的电感电流轨迹预测模型,有
 (7)
(7)
 (8)
(8)
式中,iLd,j(k+1)和iLq,j(k+1)分别为最优三矢量序列中各电压矢量作用时刻所对应的d、q轴电感电流的预测值;iLd(k)和iLq(k)分别为k时刻d、q轴电感电流的采样值;tn为各基本电压矢量作用时间;SLd,n和SLq,n分别为各电压矢量作用下d、q轴电感电流的变化梯度。结合式(1)的系统状态方程可推出电感电流的梯度表达式为
 (9)
(9)
由式(9)可以看出,电感电流的梯度表达式中包含了对应的解耦项,因此所提轨迹预测模型具有主动解耦效果。图5为一个控制周期Ts内电感预测电流变化轨迹的示意图。不同于常规MPC的建模过程,所提出的电感电流轨迹预测模型考虑了一个控制周期内电感电流的变化行为,因此可以实现对电感电流更精确的控制。
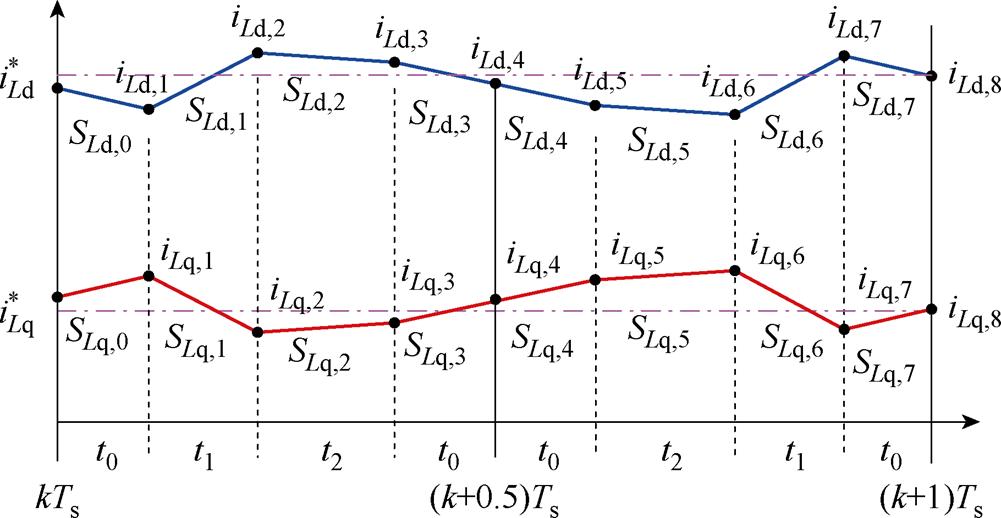
图5 电感预测电流变化轨迹
Fig.5 Predictive current trajectory of inductor
基于上述轨迹预测模型,进一步设计了一种基于分段电流参考跟踪误差的二次型价值函数为
 (10)
(10)
式中,Jj为各个时刻的参考跟踪误差; 和
和 分别为d、q轴电感电流的参考值。
分别为d、q轴电感电流的参考值。
由于LC-PMSM系统的逆变器侧电感电流中含有电容电流分量,因此不可简单地使用定子电流参考代替电感电流参考,而且两者的偏差会随着电机转速增加而被放大。为了获取准确的电感电流参考值,本文借助系统连续域稳态工作点条件进行推导,令式(1)中状态变量的导数dx/dt=0且 ,即可得到
,即可得到
 (11)
(11)
图6展示了所设计的分段电流参考跟踪误差价值函数的优化行为。由于考虑了整个控制周期内各个时刻的轨迹跟踪误差,将使得系统稳态性能更加优异。
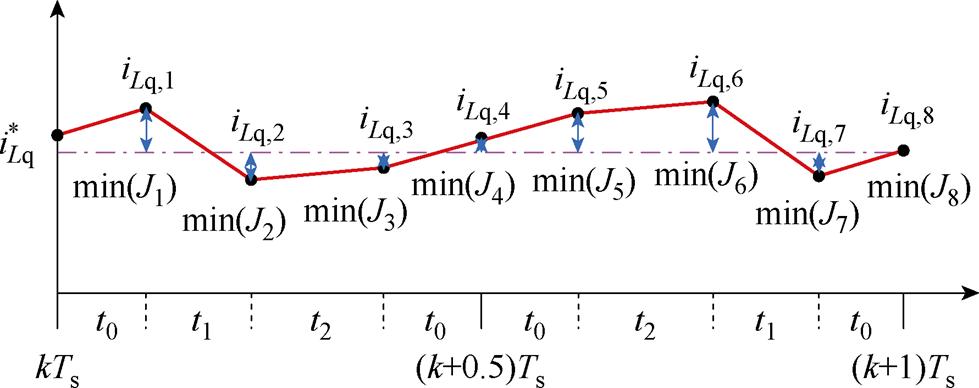
图6 分段电流参考跟踪误差优化原理
Fig.6 Principle of segmented current reference tracking error optimization
然后通过对式(10)求最优解,可以推导出基本电压矢量的作用时间为
 (12)
(12)
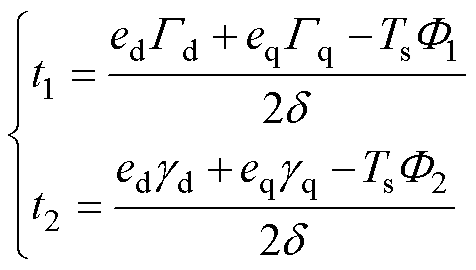 (13)
(13)
其中
式中,ed、eq分别为k时刻d、q轴参考值与采样值的误差; 、
、 、
、 、
、 、
、 、
、 和
和 为系数,表达式分别为
为系数,表达式分别为
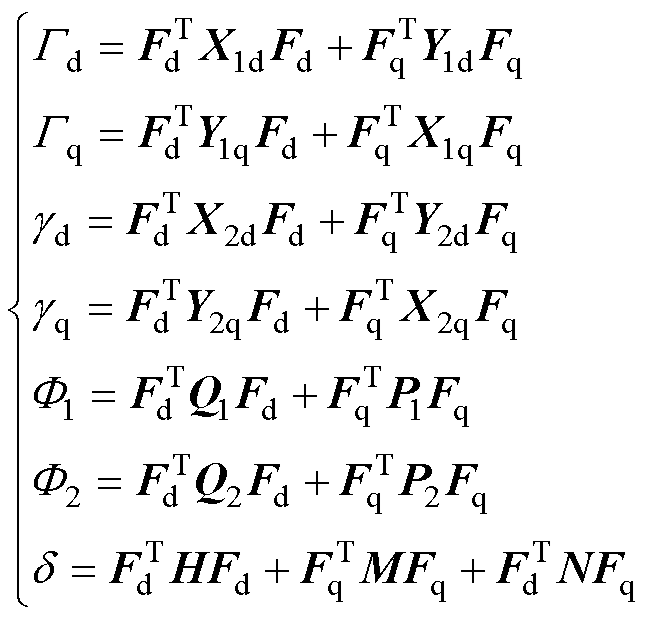 (14)
(14)
其中
式中,其余系数具体表达形式如附录所示。
通过式(10)依次判断六个扇区对称矢量序列作用下价值函数的值,即可选出最优扇区及序列。
电容电压并联虚拟电阻控制框图如图7所示。
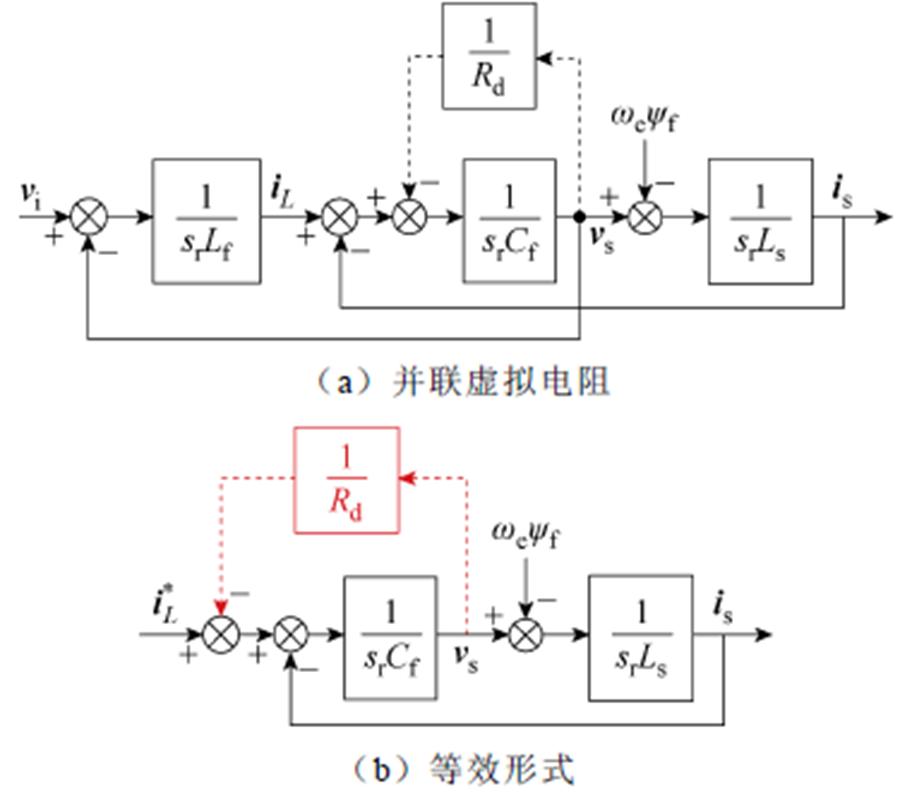
图7 电容电压并联虚拟电阻控制框图
Fig.7 The control block diagram of capacitor voltage in parallel with virtual resistor
本文引入虚拟电阻有源阻尼概念,通过模拟物理电阻在系统中的阻尼作用来抑制谐振。图7a为滤波电容并联虚拟电阻示意图,其对应传递函数为
 (15)
(15)
式中,Rd为虚拟电阻系数。
假设稳态时逆变器输出电感电流的基波分量已跟踪上其参考值,即 ,可得到如图7b所示的等效控制框图。根据信号流图可推导出
,可得到如图7b所示的等效控制框图。根据信号流图可推导出
 (16)
(16)
从式(16)中可知,可以通过包含一个附加参考项 便可以模拟电容电压并联电阻的阻尼效果。为避免附加参考项对系统基波产生影响,可以采用高通滤波器提取电容电压中的谐振分量进行控制。最终具有谐振抑制的电感电流参考为
便可以模拟电容电压并联电阻的阻尼效果。为避免附加参考项对系统基波产生影响,可以采用高通滤波器提取电容电压中的谐振分量进行控制。最终具有谐振抑制的电感电流参考为
 (17)
(17)
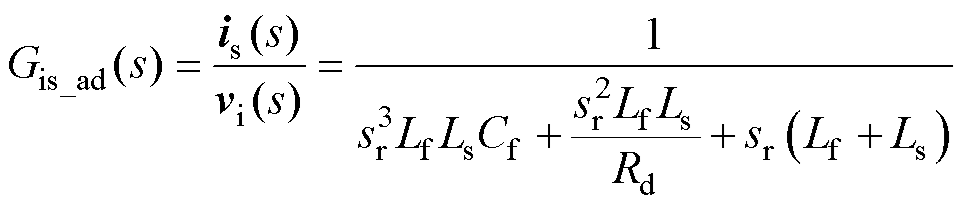
由图7b可知,电感电流参考到定子电流的传递函数为
 (18)
(18)
式中,wn为无阻尼自然振荡角频率; 为阻尼比。由此可以推导出虚拟电阻系数Rd与阻尼比之间关系满足
为阻尼比。由此可以推导出虚拟电阻系数Rd与阻尼比之间关系满足
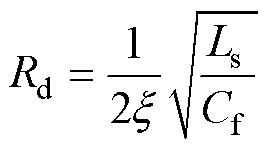 (19)
(19)
为了取得较好阻尼抑制效果,本文选取最佳阻尼比=0.707,此外Ls和Cf参数见表2,即可求得虚拟电阻系数Rd=11。
表2 控制系统参数
Tab.2 Parameters of control system
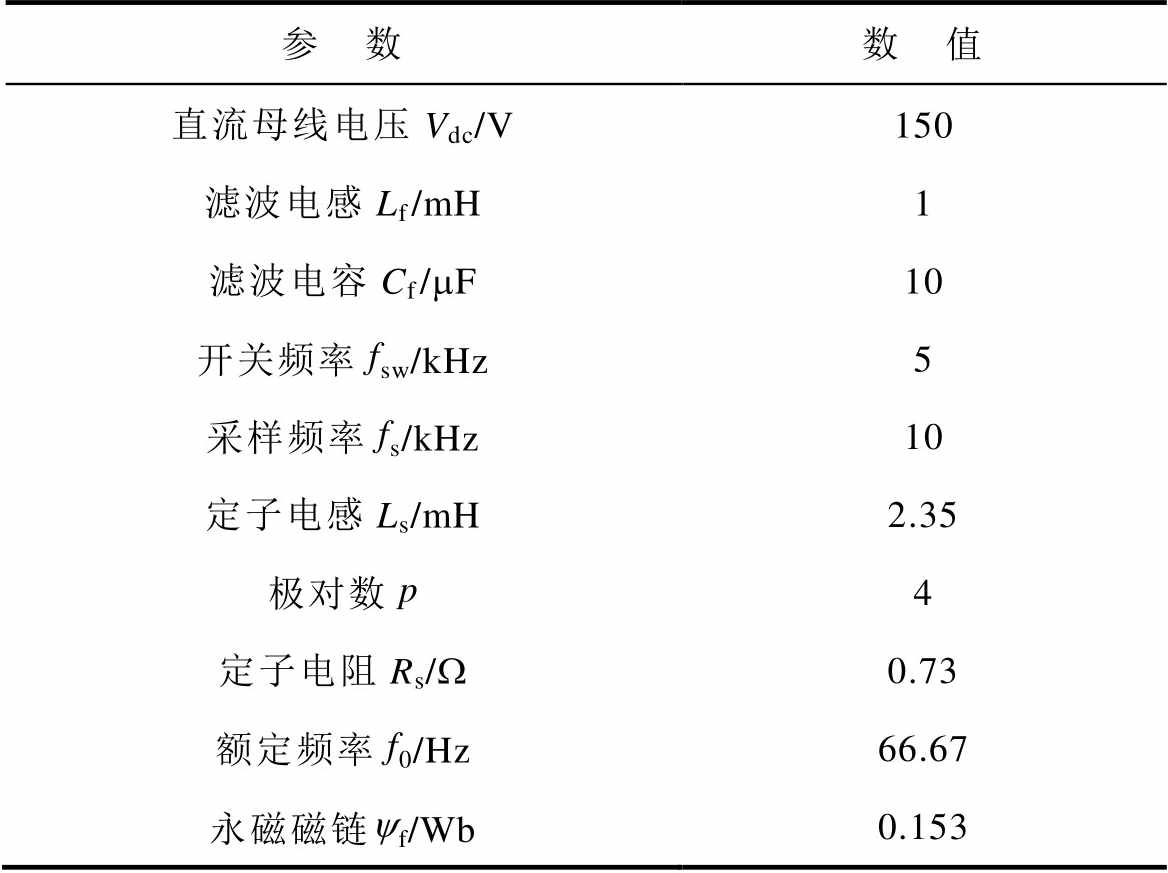
参 数数 值 直流母线电压Vdc/V150 滤波电感Lf/mH1 滤波电容Cf/mF10 开关频率fsw/kHz5 采样频率fs/kHz10 定子电感Ls/mH2.35 极对数p4 定子电阻Rs/W0.73 额定频率f0/Hz66.67 永磁磁链yf/Wb0.153
图8为基于虚拟电阻谐振抑制方法的Bode图,可以看出,所求的虚拟电阻系数可以较好地实现谐振阻尼抑制效果。
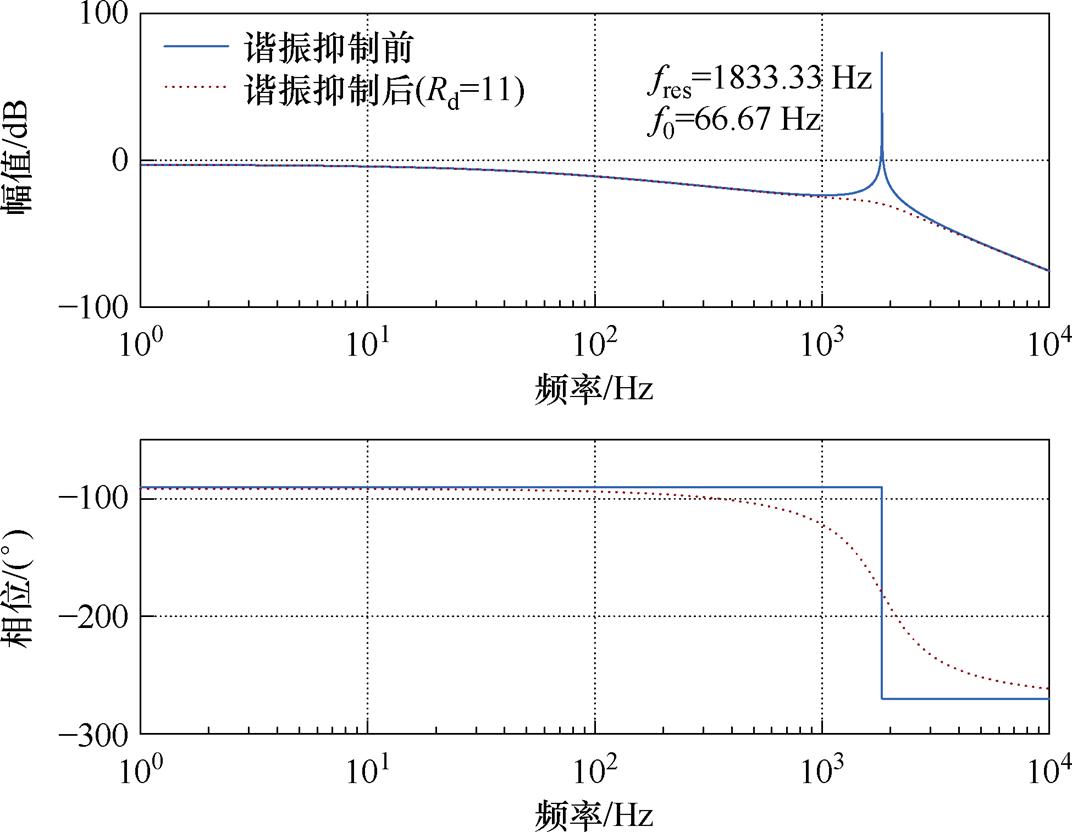
图8 基于虚拟电阻的谐振抑制方法Bode图
Fig.8 Bode diagram of virtual resistor-based resonance suppression method
本文提出的SEO-PCC策略所对应的控制框图如图9所示。
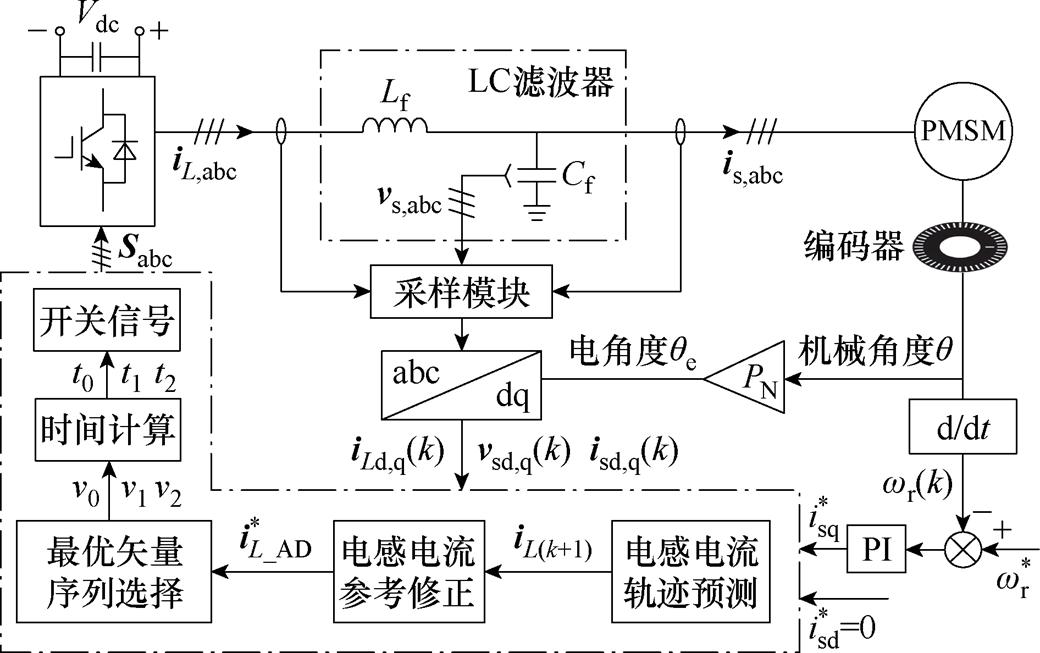
图9 SEO-PCC框图
Fig.9 Diagram of SEO-PCC
为了验证本文所提方法的有效性,搭建了相应的LC-PMSM系统实验平台,如图10所示。该实验平台主要包括:直流稳压电源、三相两电平电压源型逆变器、系统信号采集板、LC滤波器、永磁同步电机、张力控制器和磁滞制动器。其中,控制器采用了TI F28377D。考虑到实际控制系统中存在的一拍控制延迟,本文采用了向前一步预测的方法进行补偿[23]。其余系统参数详见表2。
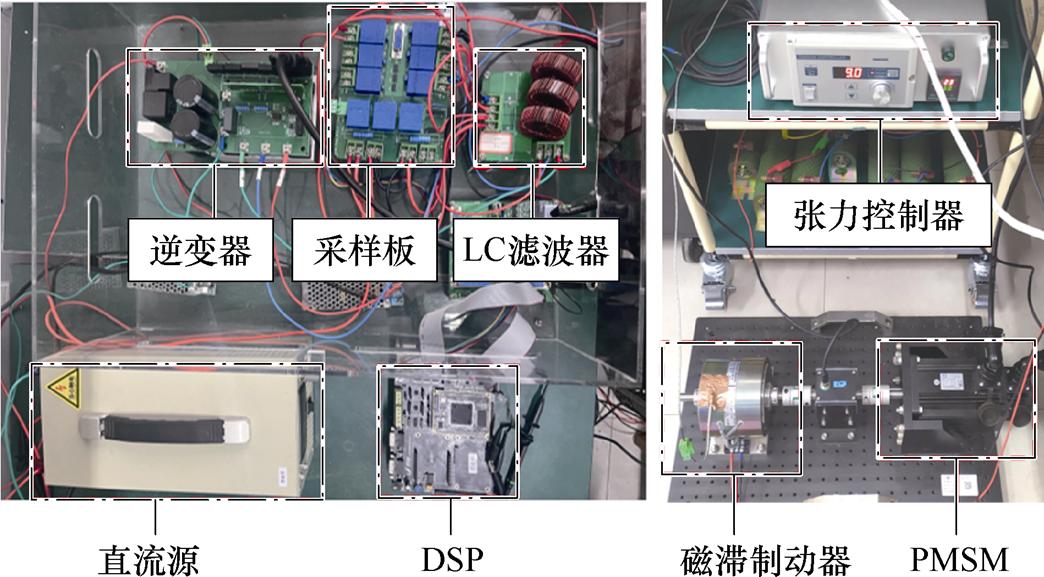
图10 LC-PMSM系统实验平台
Fig.10 Experimental platform of LC-PMSM system
本文将常规MPC和未采用分段误差价值函数G( )的PCC分别记为方法一和方法二,作为对比方法。此外,方法一的采样频率设置为25 kHz,则其等效开关频率为5 kHz[24];方法二的开关频率、采样频率和阻尼方式等控制参数设置均保持与所提方法一致,保证了对比的公平性。
)的PCC分别记为方法一和方法二,作为对比方法。此外,方法一的采样频率设置为25 kHz,则其等效开关频率为5 kHz[24];方法二的开关频率、采样频率和阻尼方式等控制参数设置均保持与所提方法一致,保证了对比的公平性。
图11给出了在所提SEO-PCC方法下LC-PMSM系统的输出波形,包括转速n、逆变器侧电压van、电容电压(电机侧电压)vsa和定子电流isa。可以看出,逆变器侧输出的脉冲方波电压经过LC滤波器后,过滤为正弦波电压对电机进行驱动,因此可以有效地解决逆变器接长线缆所引起电机侧过电压的问题。
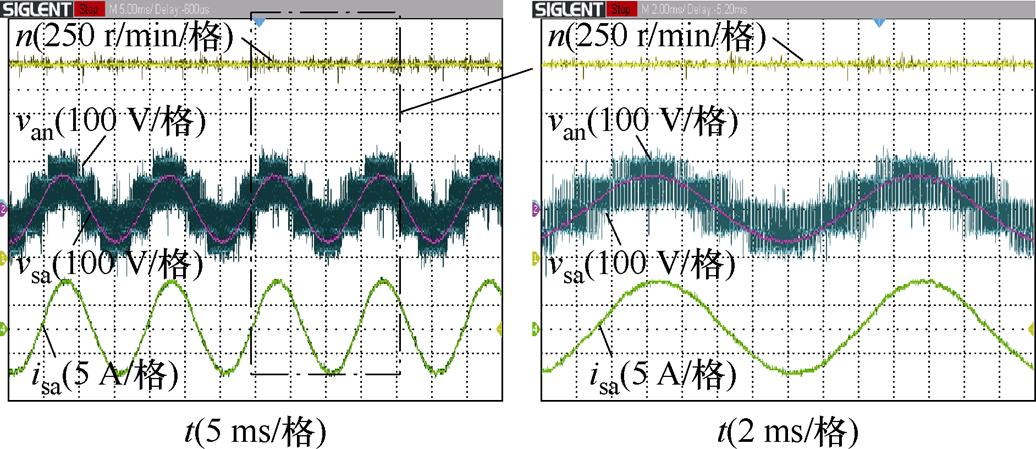
图11 LC-PMSM系统输出波形
Fig.11 The output waveforms of LC-PMSM system
图12展示了系统在额定工况下不同虚拟电阻系数Rd所对应的谐振抑制情况。如图12a所示,Rd从8变为11,系统从谐振状态变为稳态。而在图12b中,Rd从11变为60,系统重新谐振。这些结果表明,较大的Rd意味着阻尼不足,谐振不能完全抑制,而较小的Rd意味着阻尼过大,也会使系统失稳。因此,选择式(19)推导的虚拟电阻系数Rd=11,可以获得令人满意的谐振抑制性能。
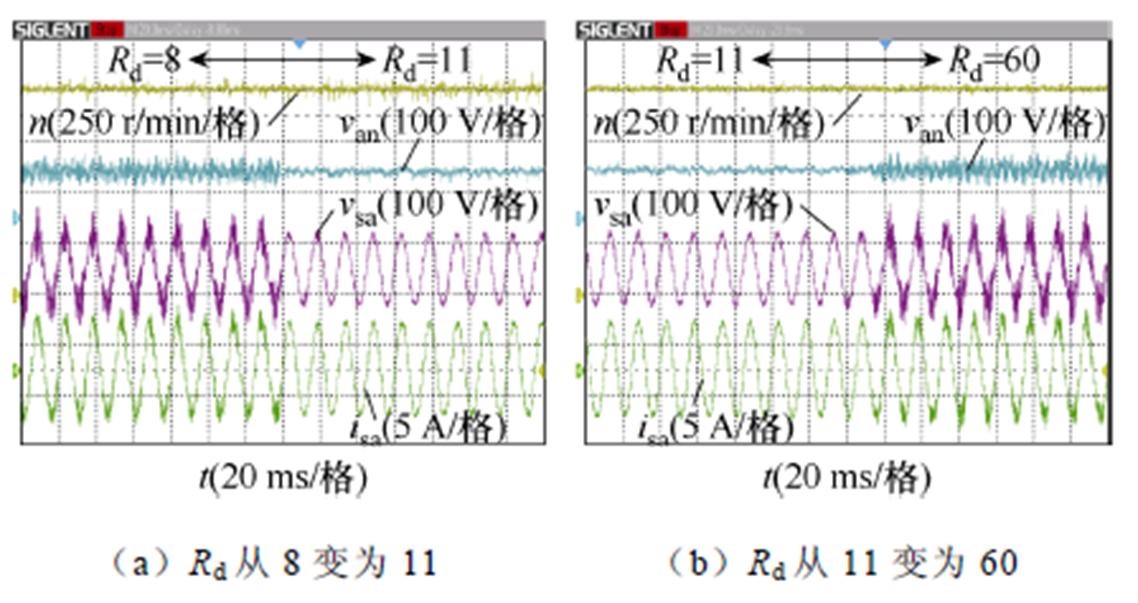
图12 不同虚拟电阻系数下实验波形
Fig.12 Experimental waveforms with different virtual resistance coefficient
图13和图14分别给出了在额定工况条件下,方法一、方法二和所提SEO-PCC方法在低速(400 r/min)与额定转速(1 000 r/min)时的稳态实验对比波形和a相定子电流的谐波频谱以及总谐波畸变率(Total Harmonic Distortion, THD)。
从图13和图14可以推断出,无论电机处于低速还是额定转速条件下,三种控制策略都不会发生谐振。但所提控制策略由于实现了整个控制周期内分段电流参考追踪误差的最小化,因此滤波电容纹波和定子电流纹波最小,同时电机定子电流谐波含量也最低。并且所提控制策略同样实现了开关频率的固定,方便了LC滤波器的设计。
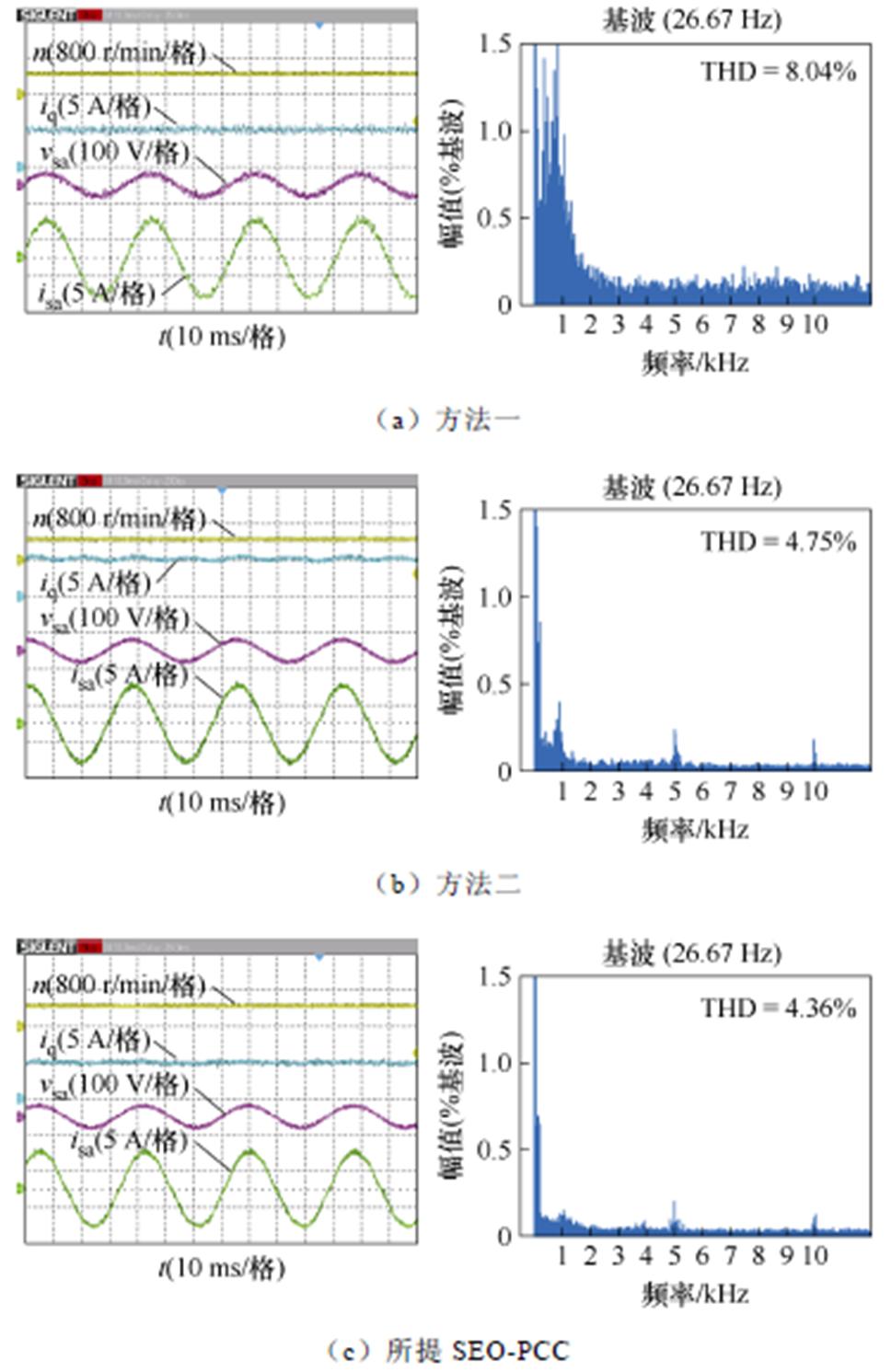
图13 低速下稳态实验波形
Fig.13 Experimental waveforms for steady state at low speed
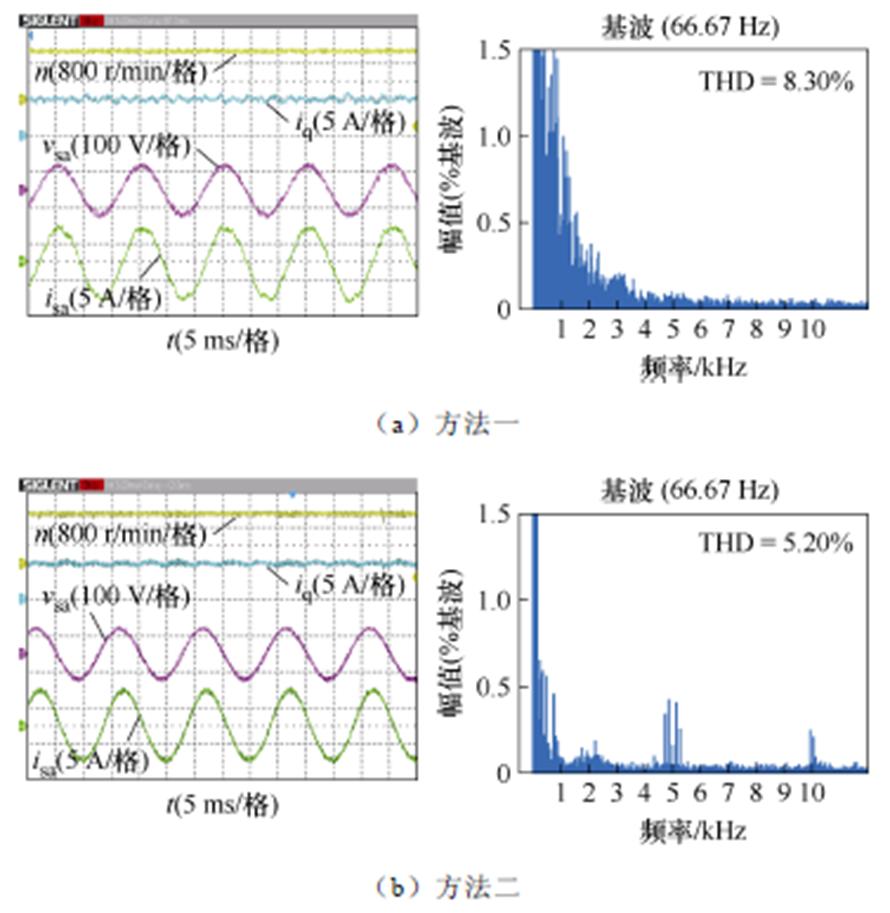
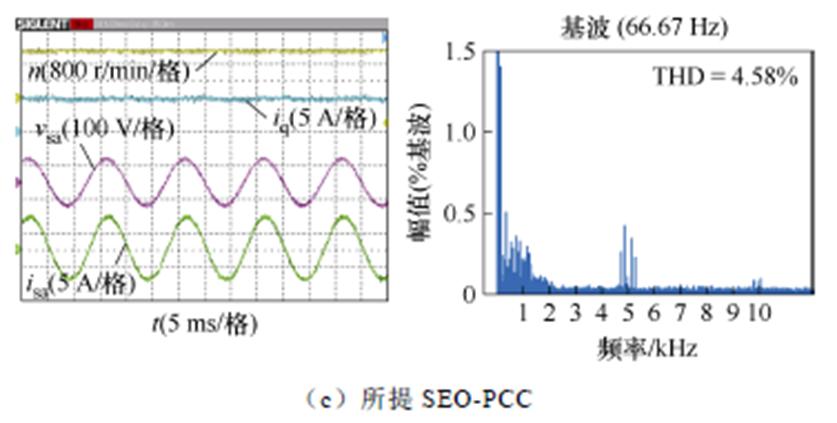
图14 额定转速下稳态实验波形
Fig.14 Experimental waveforms for steady state at rated speed
图15和图16分别为方法一、方法二和所提SEO-PCC方法在电机起动过程和突减载过程中动态性能对比实验波形。可以看出,LC-PMSM系统在三种方法控制下,不论是在起动过程还是突减载过程中,定子电流和电容电压都未出现谐振情况,并且电机转速都可以较快地跟随其参考值。因此,在动态性能方面相当。但是所提SEO-PCC方法可以在保持良好动态性能的前提下,有效降低系统电容电压和定子电流的纹波,提高系统效率。
图15 系统起动实验波形
Fig.15 The experiment waveforms of system start-up
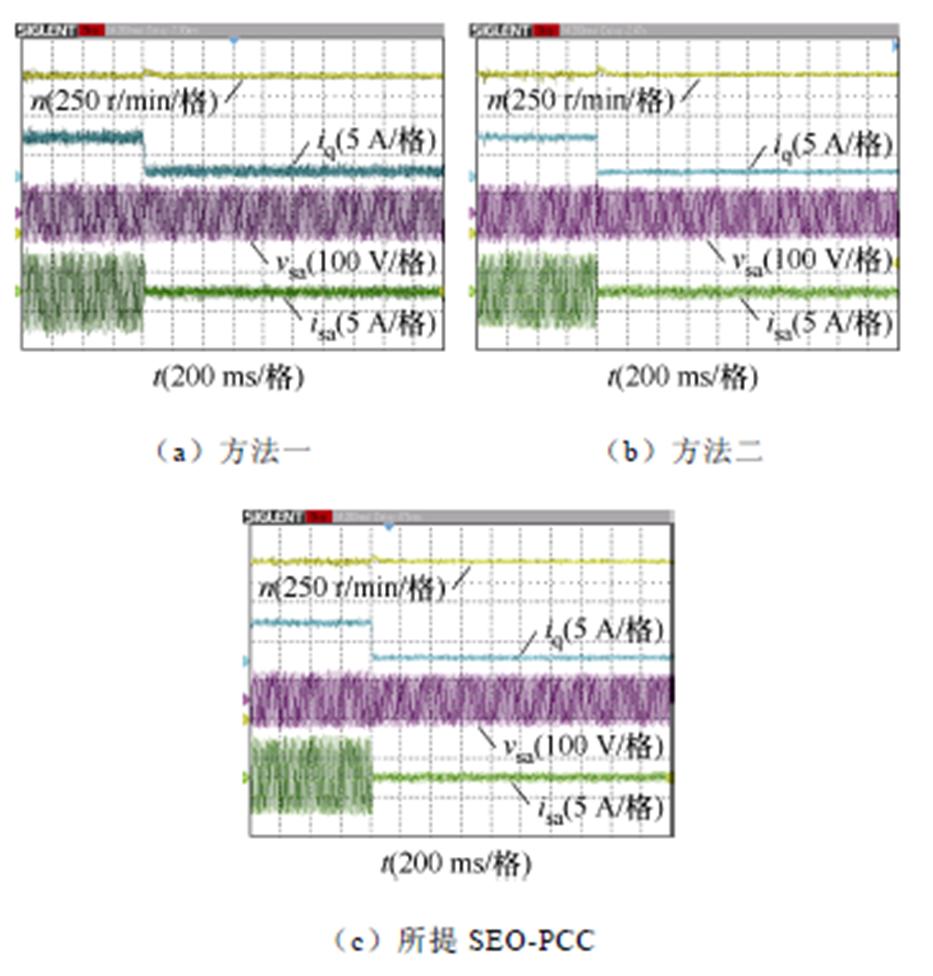
图16 系统减载实验波形
Fig.16 The experiment waveforms of system load shedding
由于逆变器死区效应会导致输出电压出现偏差,从而影响稳态性能,表3评估了不同死区时间下三种控制策略所对应的稳态性能。
表3 死区影响评估
Tab.3 Evaluation of dead-time effect
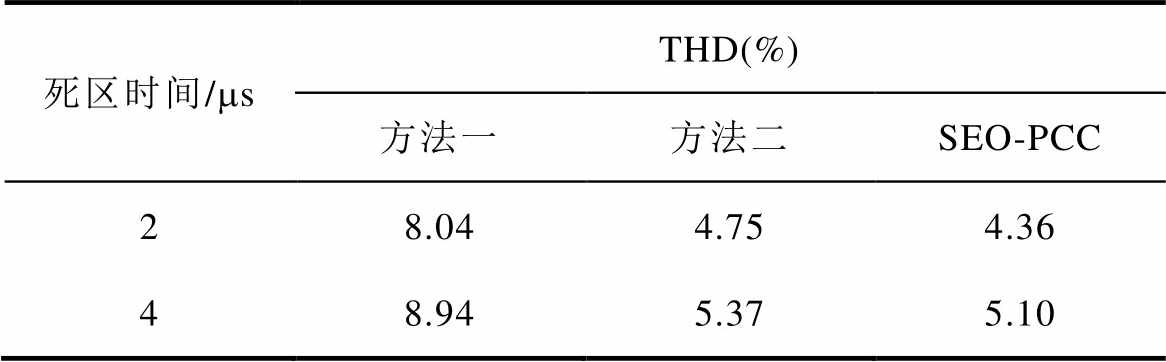
死区时间/msTHD(%) 方法一方法二SEO-PCC 28.044.754.36 48.945.375.10
由表3可知,死区效应会导致电流畸变率增大。于是本文采用了一种简单的死区补偿算法,直接通过判断电感电流的极性来在线矫正计算出的占空比,从而实现对死区时间的补偿[25]。图17给出所提SEO-PCC采用死区补偿后的对比波形,可以看出,死区补偿后,电流畸变得到了明显的改善。因此,所提控制策略可以有效地兼容现有死区补偿算法来改善死区效应。
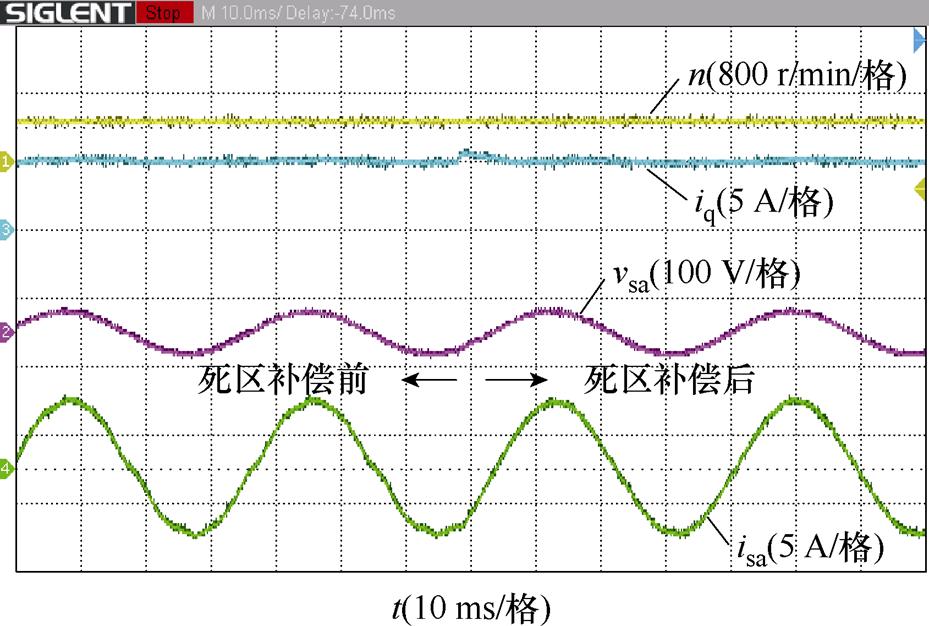
图17 死区补偿对比波形
Fig.17 The comparison waveforms of dead-time compensation
三种算法的执行时间对比如图18所示。
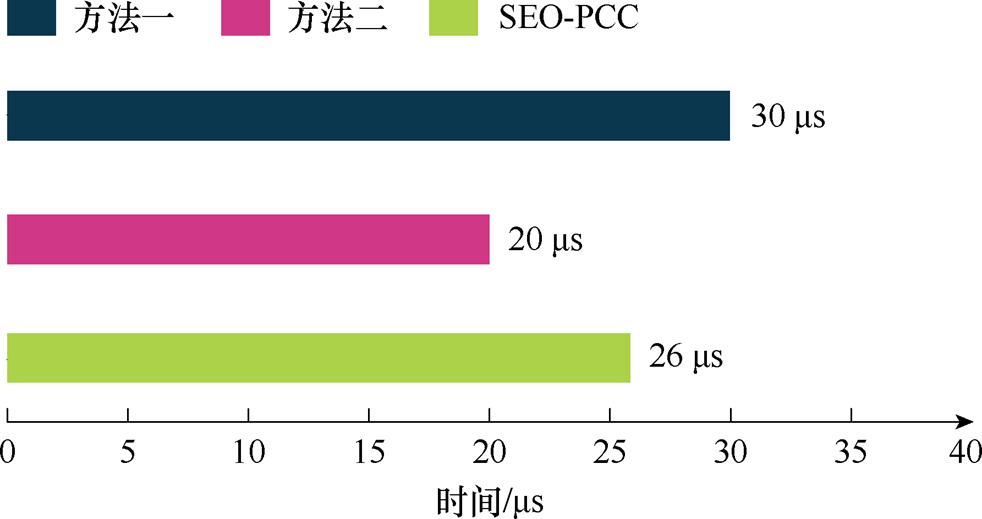
图18 三种算法的执行时间对比
Fig.18 Comparison of execution time using three algorithms
由图18可知,常规MPC(方法一)中需要进行高阶矩阵的运算,因此对于数字信号处理(Digital Signal Processing, DSP)芯片的计算负担较大,其算法执行时间也是三种方法中最长的,需要30 ms。方法二由于没有考虑控制周期内的分段误差,因此其算法执行时间相对较短,只需20 ms。而所提方法SEO-PCC更深入地考虑了整个控制周期内的分段误差优化问题,旨在实现最小化电流全局跟踪误差,导致其算法执行时间高于方法二,但是低于方法一,需要26 ms。尽管如此,所提方法执行时间仍然远小于整个控制周期(100 ms),满足运行要求且稳态性能是三种方法中最优的,因此值得额外运算量的 投入。
针对LC滤波型PMSM系统,本文提出了一种分段误差最优化预测电流控制。首先,采用对称三矢量序列,固定了系统开关频率。其次,建立电感电流轨迹预测模型并设计基于分段电流参考跟踪误差的价值函数,实现电感电流全局跟踪误差最小化,改善系统稳态性能。此外,对于系统谐振问题,通过有源阻尼策略进行了解决。最后,实验结果证明了所提控制策略的有效性。
附 录
关于式(14)中各系数的表示形式,下面进行详细展开。
(1)系数矩阵 ,
, 
其中
(2)系数矩阵 ,
, 
其中
(3)系数矩阵 ,
, 
其中
(4)系数矩阵 ,
, 
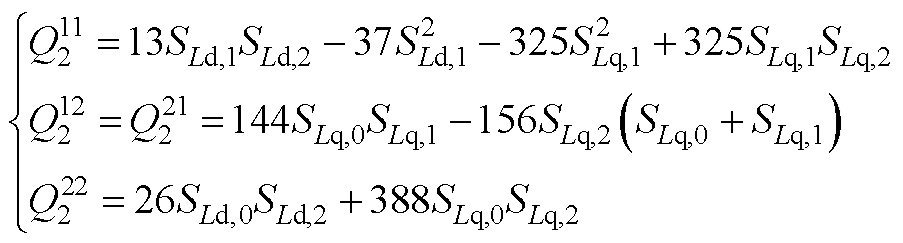
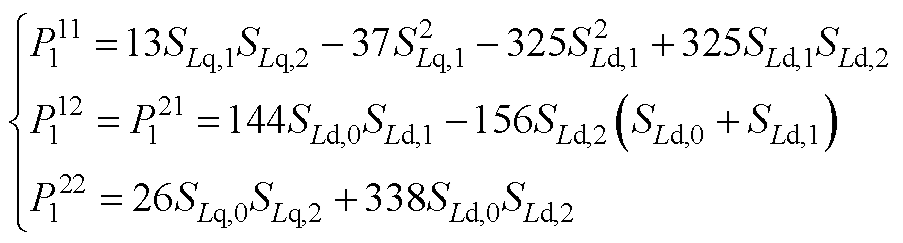
(5)系数矩阵 ,
,  ,
, 
其中
参考文献
[1] 于林鑫, 袁昕, 丁国华, 等. 基于模型预测锁相环的永磁同步电机转子位置估计方法[J]. 电气技术, 2024, 25(8): 18-26, 52.
Yu Linxin, Yuan Xin, Ding Guohua, et al. Research on sensorless control of permanent magnet syn- chronous motor based on model predictive method based phase locked loop[J]. Electrical Engineering, 2024, 25(8): 18-26, 52.
[2] 王力新, 王晓远, 高鹏, 等. 电动汽车用内置式永磁同步电机转矩脉动分析及抑制[J]. 电工技术学报, 2024, 39(20): 6386-6396.
Wang Lixin, Wang Xiaoyuan, Gao Peng, et al. Torque ripple reduction analysis of interior permanent magnet synchronous motor for electric vehicle[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(20): 6386-6396.
[3] 王宇, 张成糕, 郝雯娟. 永磁电机及其驱动系统容错技术综述[J]. 中国电机工程学报, 2022, 42(1): 351-372.
Wang Yu, Zhang Chenggao, Hao Wenjuan. Overview of fault-tolerant technologies of permanent magnet brushless machine and its control system[J]. Pro- ceedings of the CSEE, 2022, 42(1): 351-372.
[4] 薛高飞, 胡安, 潘启军, 等. PWM脉波传输电压反射抑制策略在大功率感应电机驱动中的应用[J]. 电工技术学报, 2013, 28(10): 249-256.
Xue Gaofei, Hu An, Pan Qijun, et al. The application of the voltage reflection by PWM pulse restraint strategy in the high power induction motor drive[J]. Transactions of China Electrotechnical Society, 2013, 28(10): 249-256.
[5] 鞠孝伟, 程远, 杨明亮, 等. SiC逆变器高频脉冲电压对Hairpin绕组绝缘安全的影响分析[J]. 电工技术学报, 2021, 36(24): 5115-5124.
Ju Xiaowei, Cheng Yuan, Yang Mingliang, et al. Influence analysis of high frequency pulse voltage of SiC inverter on insulation safety of Hairpin winding[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5115-5124.
[6] 吴翔, 李超, 刘志恒, 等. 带有LC正弦波滤波器的内置式永磁同步电机电流控制器谐振抑制参数设计[J]. 电工技术学报, 2023, 38(22): 6082-6093.
Wu Xiang, Li Chao, Liu Zhiheng, et al. Parameter design of the current controller for interior permanent magnet synchronous motor with LC sinusoidal filter to suppress resonance[J]. Transactions of China Electrotechnical Society, 2023, 38(22): 6082-6093.
[7] 赵仁德, 赵斌, 徐海亮, 等. 带LC滤波器的永磁同步电机控制系统及策略研究[J]. 电工技术学报, 2019, 34(增刊1): 79-86.
Zhao Rende, Zhao Bin, Xu Hailiang, et al. Research on control method of permanent magnet synchronous motor with LC filter[J]. Transactions of China Elec- trotechnical Society, 2019, 34(S1): 79-86.
[8] 贾科, 陈金锋, 钮厚敏, 等. 光伏并网系统的谐振抑制策略及无源阻尼选取方法[J]. 电力系统自动化, 2021, 45(15): 109-114.
Jia Ke, Chen Jinfeng, Niu Houmin, et al. Resonance suppression strategy and passive damping resistance selection method for photovoltaic grid-connected system[J]. Automation of Electric Power Systems, 2021, 45(15): 109-114.
[9] 刘宝泉, 郭华, 朱一昕, 等. 三相变流器无源阻尼型LCL滤波器的分析与设计[J]. 电工技术学报, 2017, 32(2): 195-205.
Liu Baoquan, Guo Hua, Zhu Yixin, et al. Analysis and design of a passively damping LCL filter in three- phase converters[J]. Transactions of China Electro- technical Society, 2017, 32(2): 195-205.
[10] 高磊, 吕敬, 马骏超, 等. 基于电路等效的并网逆变器失稳分析与稳定控制[J]. 电工技术学报, 2024, 39(8): 2325-2341.
Gao Lei, Lü Jing, Ma Junchao, et al. Instability analysis and stability control of grid-connected inverter based on impedance circuit equivalent[J]. Transactions of China Electrotechnical Society, 2024, 39(8): 2325-2341.
[11] 熊小玲, 李昕悦, 周琰, 等. 基于陷波器的构网型换流器同步频率谐振抑制策略[J]. 电工技术学报, 2024, 39(12): 3827-3839.
Xiong Xiaoling, Li Xinyue, Zhou Yan, et al. Syn- chronous frequency resonance suppression of grid- forming converter based on Notch filter[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(12): 3827-3839.
[12] 陈建, 任永峰, 孟庆天, 等. 含UDE附加阻尼支路的构网型直驱永磁同步风电机组次同步振荡抑制策略[J]. 电工技术学报, 2024, 39(7): 1985-2000.
Chen Jian, Ren Yongfeng, Meng Qingtian, et al. Sub-synchronous oscillation suppression strategy for grid-forming direct-drive permanent magnet syn- chronous generator with uncertainty and disturbance estimator supplementary damping branch[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(7): 1985-2000.
[13] Geng Weiwei, Zhang Zhuoran, Li Qiang. Analysis and experimental verification of a conventional inverter with output LC filter to drive ironless stator axial-flux PM motor[J]. IEEE Transactions on Transportation Electrification, 2021, 7(4): 2600- 2610.
[14] Xu Jiaqun, Jia Pufan, Zhang Ruitao, et al. Active damping for LC-filtered PMSM based on low-pass filter capacitor current feedback and extended state observer[J]. IEEE Transactions on Transportation Electrification, 2024, 10(2): 3292-3304.
[15] Lü Zekai, Wu Lijian. Current control scheme for LC-equipped PMSM drive considering decoupling and resonance suppression in synchronous complex- vector frame[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2023, 11(2): 2061-2073.
[16] Mishra P, Maheshwari R. A simple feedforward approach to stabilize VSI-fed induction motor with filter in RFOC[J]. IEEE Transactions on Industrial Electronics, 2020, 67(12): 10191-10201.
[17] 王治国, 郑泽东, 李永东, 等. 交流电机模型预测控制综述[J]. 电机与控制学报, 2022, 26(11): 14-30.
Wang Zhiguo, Zheng Zedong, Li Yongdong, et al. A review of model predictive control for AC motor[J]. Electric Machines and Control, 2022, 26(11): 14-30.
[18] Laczynski T, Mertens A. Predictive stator current control for medium voltage drives with LC filters[J]. IEEE Transactions on Power Electronics, 2009, 24(11): 2427-2435.
[19] Panten N, Hoffmann N, Fuchs F W. Finite control set model predictive current control for grid-connected voltage-source converters with LCL filters: a study based on different state feedbacks[J]. IEEE Transa- ctions on Power Electronics, 2016, 31(7): 5189-5200.
[20] Xue Cheng, Zhou Dehong, Li Yunwei. Finite-control- set model predictive control for three-level NPC inverter-fed PMSM drives with LC filter[J]. IEEE Transactions on Industrial Electronics, 2021, 68(12): 11980-11991.
[21] Geyer T, Karamanakos P, Kennel R. On the benefit of long-horizon direct model predictive control for drives with LC filters[C]//2014 IEEE Energy Con- version Congress and Exposition (ECCE), Pittsburgh, PA, USA, 2014: 3520-3527.
[22] 李耀华, 王孝宇, 吴庭旭, 等. 带LC滤波器的永磁同步电机多步模型预测电流控制[J]. 电机与控制应用, 2024, 51(11): 21-31.
Li Yaohua, Wang Xiaoyu, Wu Tingxu, et al. Multi- step model predictive current control of permanent magnet synchronous motor with LC filter[J]. Electric Machines & Control Application, 2024, 51(11): 21-31.
[23] 陈荣, 翟凯淼, 舒胡平. 小偏差永磁同步电机双矢量模型预测控制[J]. 电机与控制学报, 2024, 28(10): 155-165.
Chen Rong, Zhai Kaimiao, Shu Huping. Small deviation dual vector model predictive control for permanent magnet synchronous motor[J]. Electric Machines and Control, 2024, 28(10): 155-165.
[24] Rodriguez J, Pontt J, Silva C A, et al. Predictive current control of a voltage source inverter[J]. IEEE Transactions on Industrial Electronics, 2007, 54(1): 495-503.
[25] Lin J L. A new approach of dead-time compensation for PWM voltage inverters[J]. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 2002, 49(4): 476-483.
Abstract Currently, voltage source inverters (VSIs) based on pulse width modulation (PWM) strategies are widely used in permanent magnet synchronous motor (PMSM) drive systems due to their excellent variable frequency control performance. However, the traveling wave reflection effect of transmission cables can cause overvoltage problems at the motor side, damaging motor insulation. An LC-filtered permanent magnet synchronous motor (LC-PMSM) drive system can filter square-wave pulse voltages into approximate sine-wave voltages, effectively mitigating overvoltage. Nevertheless, the introduction of LC filters increases the order of the system's dynamic equations, leading to unexpected resonance and unsatisfactory steady-state performance. Therefore, this paper proposes a segmented error optimization predictive current control (SEO-PCC) strategy.
First, a symmetric three-vector sequence modulation scheme is adopted to ensure a fixed switching frequency during system operation. Then, an inductor current trajectory prediction model is established based on the inductor current gradient equation. A quadratic cost function is designed based on the segmented current reference tracking error. By minimizing the global reference tracking error of the inductor current, the system's steady-state performance is improved. Additionally, to actively suppress the inherent resonance of the LC-PMSM system, an active damping component based on virtual resistance is incorporated into the cost function.
The tests are conducted using an LC-PMSM drive platform. The results show that the square-wave pulse voltage output by the inverter can be effectively filtered into a sine-wave voltage through the LC filter to drive the motor, thereby alleviating overvoltage issues. Furthermore, under different operating conditions such as motor start-up, speed regulation, and load changes, the proposed SEO-PCC can suppress system resonance through active damping. Compared to conventional MPC, the SEO-PCC demonstrates comparable dynamic performance, with feedback values rapidly tracking reference values. Regarding steady-state performance, the total harmonic distortion (THD) of the stator current is lower than that of conventional MPC. In addition, the harmonic components of the stator current are primarily concentrated around the switching frequency and its integer multiples, which is advantageous for the design of the LC filter.
The following conclusions can be drawn. (1) The proposed SEO-PCC employs a symmetric three-vector sequence modulation algorithm, maintaining a fixed switching frequency during system operation. (2) A quadratic cost function based on segmented current reference tracking error is designed, aiming at minimizing the global reference tracking error of the inductor current and improving the system's steady-state performance. (3) The system resonance is actively damped by embedding an active damping component based on virtual resistance in the quadratic cost function, ensuring the stability of the system.
Keywords:LC filter, permanent magnet synchronous motor, trajectory prediction model, segmented error, resonance suppression
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.250265
国家自然科学基金(52107217)、中央高校基本科研业务费专项资金(2025-00016)、江苏省研究生科研与实践创新计划(KYCX25_2909)和中国矿业大学研究生创新计划(2025WLKXJ237)资助项目。
收稿日期 2025-02-21
改稿日期 2025-04-07
谢 淼 男,1996年生,博士研究生,研究方向为高性能永磁同步电机控制。
E-mail: xiemiao@cumt.edu.cn
伍小杰 男,1966年生,教授,博士生导师,研究方向为电力电子与电力传动。
E-mail: xjwu@cumt.edu.cn(通信作者)
(编辑 崔文静)