 (1)
(1)
摘要 针对二阶广义积分型磁链观测器(SOGIFO)存在直流偏置和低次谐波干扰,导致电机磁链观测精度低、系统可靠性不高等问题,该文提出了一种混合多谐振三阶广义积分型磁链观测器(MRTOGIFO),用于永磁同步电机无位置传感器控制。首先,利用三阶广义积分器(TOGI)的陷波回路得到直流偏置分量,设计复系数谐振单元(RU)提取低次谐波信号。然后,由交叉反馈网络将直流偏置分量和低次谐波信号滤除,以提升观测器性能,从而获得永磁同步电机转子磁链的准确位置。推导了MRTOGIFO的传递函数,基于频域法分析了所提磁链观测器对直流偏置和低次谐波的抑制性能,利用RU的增益特性削弱了TOGI在低频处的谐振尖峰,提高了系统的动态性能。将所提控制算法与SOGIFO、三阶广义积分型磁链观测器(TOGIFO)进行了对比分析。最后,搭建了一个800 W的电机硬件平台进行对比实验,实验结果验证了所提方案的可行性和有效性。
关键词:永磁同步电机(PMSM) 无位置传感器 矢量控制 磁链估计 磁链观测器
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)具有节能、低噪、调速范围宽等优点,现已被广泛应用于新能源汽车、工业自动化、机器人等领域。PMSM通常采用传感器来获得实时转子位置信息,这不仅增加了成本和体积,而且降低了恶劣工况下的检测精度和可靠性。因此,PMSM的无位置传感器矢量控制逐渐成为研究热点[1-3]。
PMSM的无位置传感器控制技术主要分为基于外部信号注入的高频注入法和基于电机基波数学模型的基波估计法[4]。高频注入法在电机定子电压中注入高频信号,利用PMSM的凸极效应从高频电流响应中获得转子准确位置信息。但其工作速度范围狭窄,注入高频信号时会引入噪声[3-4]。基波估计法则通过反电动势来获得转子位置。但反电动势的幅值与转速成正比,低速下反电动势波形易受到电磁噪声、死区时间、空间磁链分布不均等影响而产生畸变[5-6]。PMSM的转子位置信息也可以通过基于电压方程的磁链观测方法计算得到,只需对反电动势进行积分即可得到转子磁链[7]。但当采用一阶积分器(First-Order Integrator, FOI)时,直流分量随积分时间增加,导致转子磁链波形产生畸变。为此有研究采用低通滤波器(Low Pass Filter, LPF)代替FOI进行磁链观测。但该方法无法完全消除直流分量,且当转速角频率低于LPF的截止频率,会产生波形失真。
近年来,二阶广义积分器(Second-Order Gen- eralized Integral, SOGI)[8-9]被应用于PMSM无感控制,该方法能够对反电动势中的谐波和直流偏置进行有效抑制。文献[10]对基于锁频环(Frequency- Locked Loop, FLL)的SOGI结构进行了建模、分析、比较。文献[11]综述了基于FLL和锁相环(Phase Lock Loop, PLL)的转速估计方法。文献[12]将SOGI级联陷波器应用于高频注入法的信号提取。文献[13]提出了一种二阶广义积分型磁链观测器(Second- Order Generalized Integral Flux Observer, SOGIFO)。但当系统存在较大直流偏置和低次谐波干扰时,SOGIFO的控制性能依然受限。
为了进一步提高磁链观测精度,文献[14]设计了一种级联SOGIFO,利用两个SOGI进行多级滤波使具有更强的谐波抑制能力。文献[15]提出一种三阶广义积分型磁链观测器(Third-Order Generalized Integral Flux Observer, TOGIFO),在减小直流偏置的同时降低了系统传递函数的阶数,引入TOGI,但引入的谐振尖峰影响了系统动态性能。文献[16]将SOGI和TOGI串联提出了五阶广义积分型磁链观测器,提高了控制系统对谐波的抑制性能。文献[17]对广义积分型磁链观测器的性能进行了分析,提出了最优TOGI和级联SOGI参数设计。以上方法本质上都是利用SOGI的带通滤波特性对谐波进行抑制,抑制效果依赖观测器增益。增大观测器增益能提高观测器的响应速度,但会降低系统对谐波的抑制效果;而减小观测器增益能抑制谐波的干扰,但系统响应速度变慢。当电机处于低速运行时,观测器性能会因此受限。文献[18]为了抑制电网中谐波的影响,提出了多SOGI并联结构,针对特定阶次谐波进行反馈滤波,消除谐波干扰。文献[19-20]将这种方法应用于交流电机无感控制中,消除低速下谐波分量对观测结果的影响。但该类控制器使用了多个积分器,大大增加了运算量,控制系统复杂。
综上所述,本文提出了一种混合多谐振三阶广义积分型磁链观测器(Mix-multi-Resonant Third-Order Generalized Integrator Flux Observer, MRTOGIFO),实现对PMSM转子位置进行精准观测。主要工作如下:
(1)设计复系数谐振单元(Resonant Unit, RU)代替SOGI,减少了积分器的使用;构建交叉反馈网络将直流偏置和5、7次谐波从原始观测信号中分离,有效地消除了低速下直流偏置和5、7次谐波的干扰。
(2)利用RU在频域的增益特性,削弱了TOGI在低频处的谐振尖峰,提高了系统的动态性能。
(3)通过复频域法分析所提控制方案的性能,理论推导了MRTOGIFO能更有效地抑制直流偏置和5、7次谐波信号。
最后,在一台800 W样机上对SOGIFO、TOGIFO和MRTOGIFO等控制方法进行了对比分析,验证了本文所提方法的可行性和有效性。
PMSM在两相静止坐标系下的数学模型为
(1)
 (2)
(2)
 (3)
(3)
其中
ys=[ysa ysb]T
us=[ua ub]T
is=[ia ib]T
式中,ys、us、is、yr为ab轴下的定子磁链、电压、电流和转子磁链;Ls为定子电感;Rs为定子电阻;p为微分算子;qe为转子电角度;we为转子电角速度。PMSM的转子磁链可以被表示为
 (4)
(4)
式中,ym为永磁体磁链,则磁链观测器可表示为
 (5)
(5)
其中
er=[era erb]T
式中, 、er分别为ab轴下的转子磁链估计值和反电动势。传统磁链观测器在采用一阶积分器(FOI)时,转子磁链可表示为
、er分别为ab轴下的转子磁链估计值和反电动势。传统磁链观测器在采用一阶积分器(FOI)时,转子磁链可表示为
 (6)
(6)
由于实际系统中积分初始值未知、参数失配、测量误差、噪声、逆变器死区等因素的影响,PMSM的电压、电流和反电动势会引入直流偏置和6k±1次谐波[7],其中5、7次谐波分量较大,式(6)重写为
 (7)
(7)
其中
A0=[A0a A0b]T
A1=[A1a A1b]T
Ah=[Aha Ahb]T
式中,A0、A1、Ah分别为直流量、基波分量和第h次谐波分量的幅值;A1sin(w1t+j1)和Ahsin(wht+jh)分别为转子反电动势的基波分量和谐波分量;w1、wh和j1、jh分别为基波分量、h次谐波分量的频率和初始相位。
SOGIFO通过FLL来跟踪基波分量频率[16],结构如图1所示。图中, 为FLL的增益系数。SOGIFO的传递函数可以表示为
为FLL的增益系数。SOGIFO的传递函数可以表示为
 (8)
(8)
式中,ks1为基波通道。当FLL输出频率跟踪上基频时,令s=jw1,则
 (9)
(9)
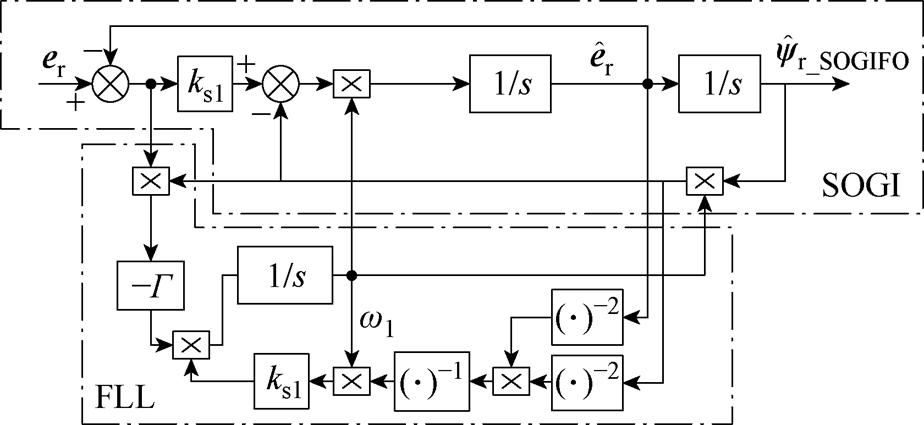
图1 SOGIFO结构
Fig.1 The structure of SOGIFO
由式(9)可知,转子磁链是对反电动势的积分。SOGIFO对各频率信号的作用可表示为
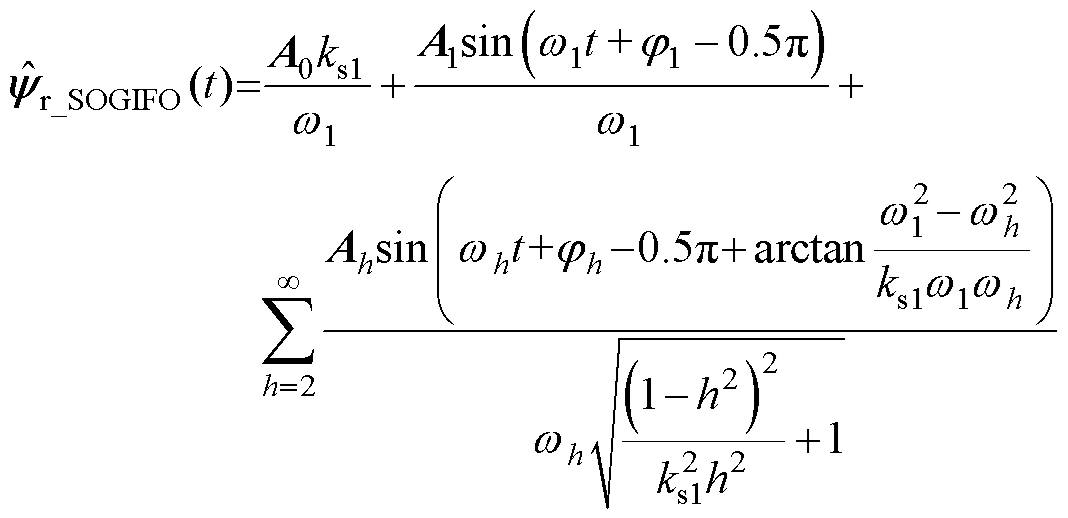 (10)
(10)
由式(10)可得,转子磁链估计值中直流分量被削弱为A0ks1/w1,避免了FOI的积分饱和问题。相比于LPF,基波分量也没有产生幅值和相位的改变。但也能看出SOGIFO无法完全消除直流偏置,且对谐波信号的抑制效果取决于增益系数ks1的取值。当取ks1=1.414时,对5、7次谐波信号抑制分别为35%和25%。减小ks1,可增强SOGIFO对直流偏置和5、7次谐波的抑制能力,但同时也降低了系统带宽,动态响应变慢。
通过增加一个积分器,形成直流反馈通道[15],TOGIFO的结构如图2所示,其传递函数表示为
 (11)
(11)
式中,k0、k1分别为直流通道和基波通道的增益系数。
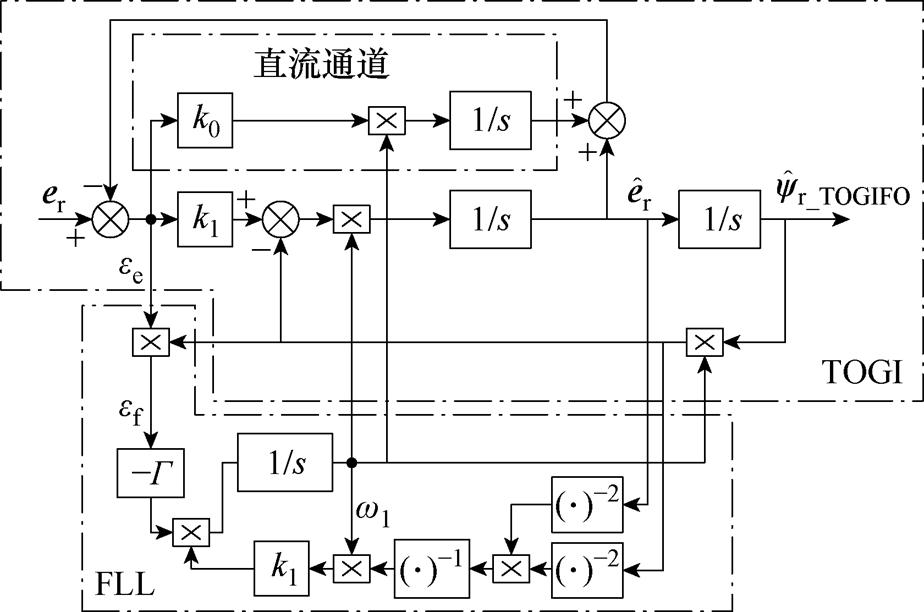
图2 TOGIFO结构
Fig.2 The structure of TOGIFO
当FLL输出频率跟踪上基频时,令s=jw1,则

 (12)
(12)
TOGIFO对各频率信号的作用可表示为
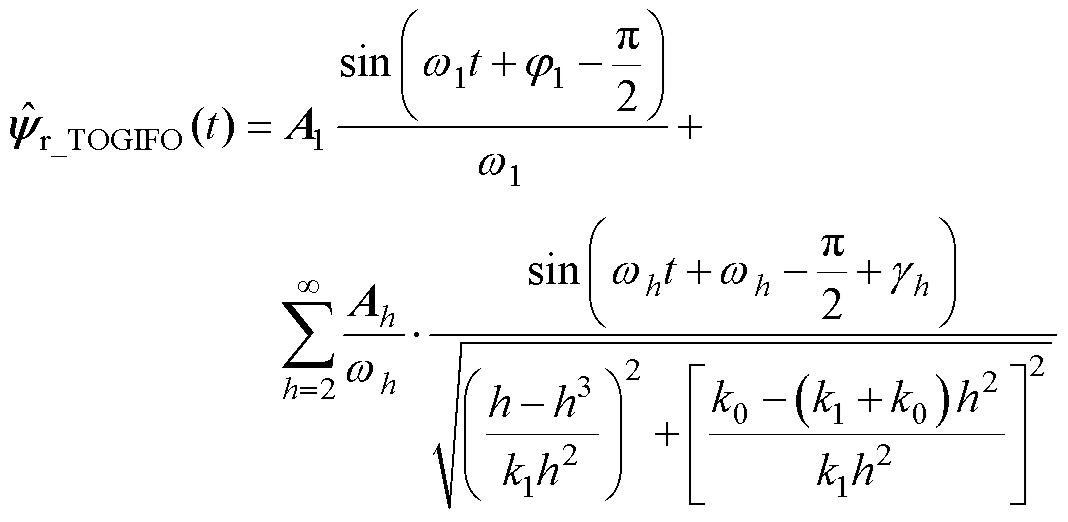 (13)
(13)
其中
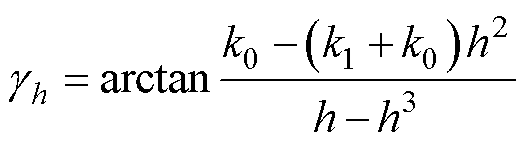
TOGIFO对谐波的抑制能力可以表示为
 (14)
(14)
由式(13)、式(14)可以看出,磁链观测值中不含直流分量,抑制了输入信号中的直流偏置干扰。且TOGIFO的谐波抑制能力与SOGIFO几乎一致。
图3给出基波频率w1=100 rad/s,k1=1.414,k0取不同值时对应TOGIFO的Bode图。
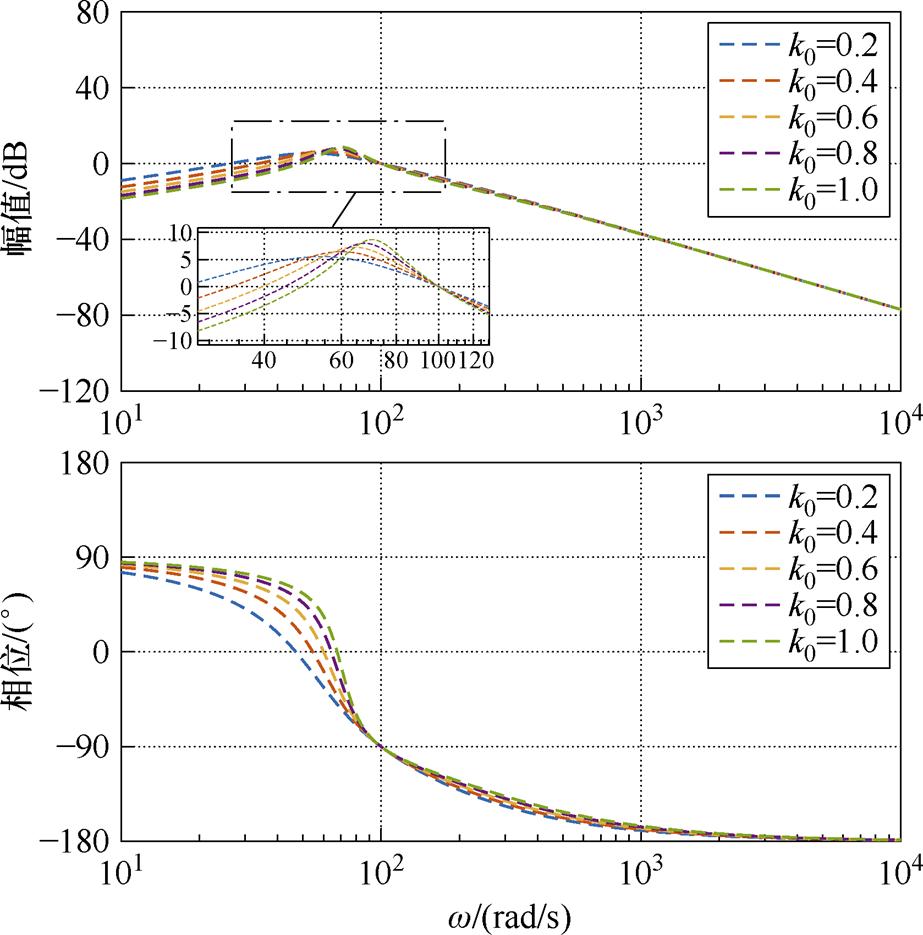
图3 k0改变时TOGIFO的Bode图
Fig.3 Bode plots of TOGIFO with different k0
由图3可得,TOGIFO对5、7次谐波分量有一定的抑制作用,但并不能完全消除。且直流通道增益k0使得TOGIFO在频率w1附近出现谐振尖峰,对系统性能造成影响。
FLL用来准确地跟踪输入信号的基波频率 。如图2所示,将FLL误差信号
。如图2所示,将FLL误差信号 定义[10]为
定义[10]为
 (15)
(15)
式中, 为反电动势估计误差;
为反电动势估计误差; 为归一化增益,随着输入信号的基波频率及幅值而变化。
为归一化增益,随着输入信号的基波频率及幅值而变化。
 (16)
(16)
由式(16)可知,磁链观测值中的谐波分量和谐振尖峰直接影响了误差信号,使得估计频率和磁链位置产生观测误差,进而降低了闭环控制系统的性能,因此需要对谐波分量进一步抑制和消除。
本文提出一种改进型MRTOGIFO,利用复系数谐振单元(RU),构成交叉反馈网络,对磁链观测值中的直流偏置和5、7次谐波进行消除。
MRTOGIFO的结构如图4所示,TOGI构成MRTOGIFO的基波信号通道,5次谐波谐振单元RU5、7次谐波谐振单元RU7构成谐波信号通道。 、
、 、
、 、
、 分别为ab轴下的转子磁链、反电动势基波、5次谐波、7次谐波信号的估计值。
分别为ab轴下的转子磁链、反电动势基波、5次谐波、7次谐波信号的估计值。 、
、
 、
、 、
、 ,k0、k1为TOGI的系数,k5为RU5的系数,k7为RU7的系数,w1、w5、w7分别为基波、5次谐波、7次谐波的频率。
,k0、k1为TOGI的系数,k5为RU5的系数,k7为RU7的系数,w1、w5、w7分别为基波、5次谐波、7次谐波的频率。
基波通道传递函数为
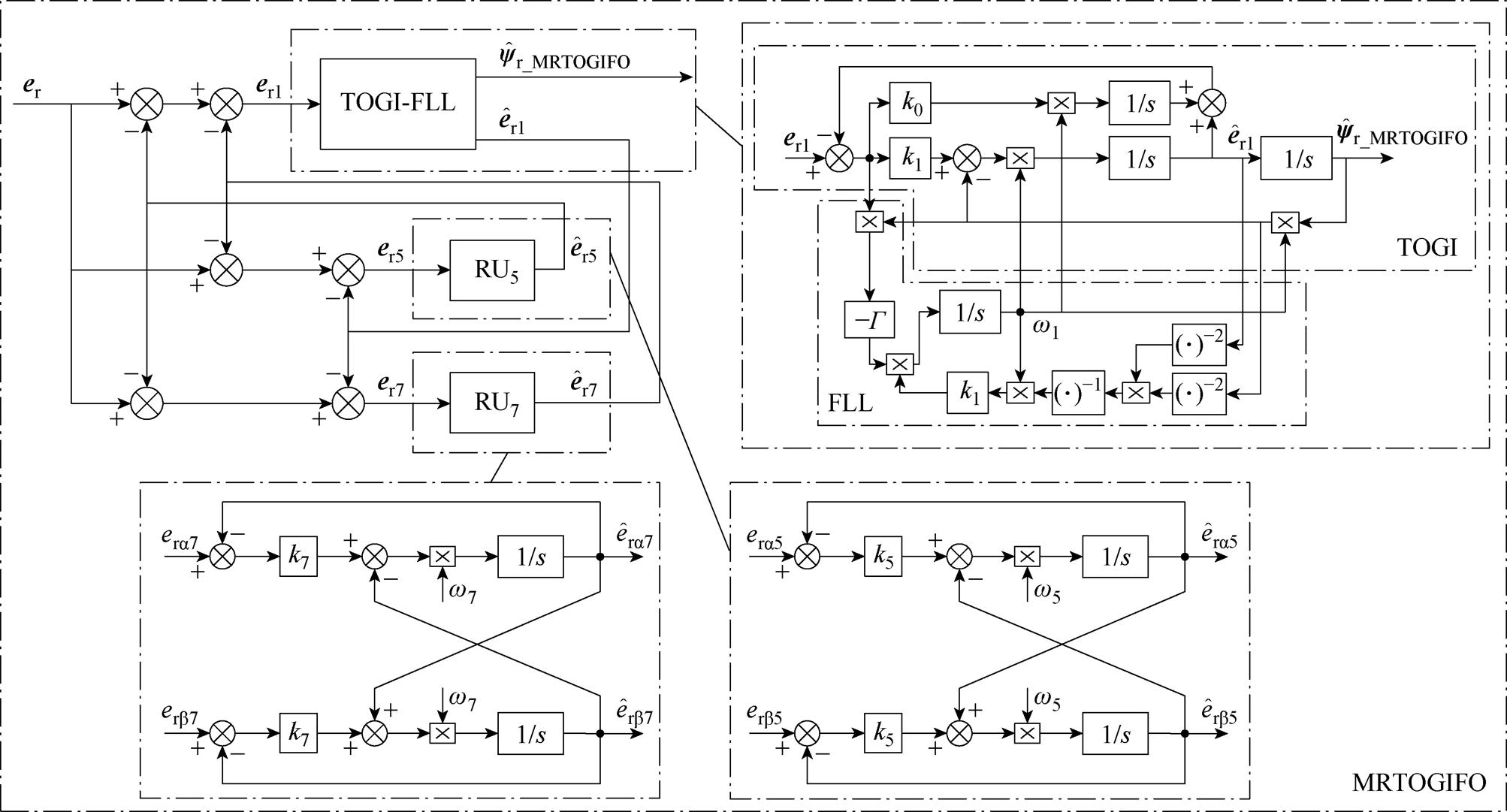
图4 MRTOGIFO结构
Fig.4 The structure of MRTOGIFO
 (17)
(17)
式中, 简记为
简记为 。
。
考虑到a、b轴正交,谐波通道RU5和RU7的传递函数在复平面内可化简为
 (18)
(18)
 (19)
(19)
式中, 、
、 简记为
简记为 、
、 。
。
当TOGI、RU5、RU7构成交叉反馈网络后,基波、5次谐波、7次谐波通道的输出为
 (20)
(20)
 (21)
(21)
 (22)
(22)
因此,MRTOGIFO的传递函数DM(s)可被表示为
 (23)
(23)
式中, 简记为
简记为 。
。
1)对直流分量的影响
当反电动势中存在直流分量时,由终值定理得
 (24)
(24)
式(24)表明,MRTOGIFO能够消除直流偏置。
2)对基波信号的影响
令s=jw1,代入式(17)可得
 (25)
(25)
根据式(23)、式(25)可得
 (26)
(26)
即转子磁链是对反电动势基频信号的积分。
3)对5, 7次谐波信号的影响
令s=jw5,代入式(18)可得
 (27)
(27)
根据式(23)、式(27)可得
 (28)
(28)
同理,对7次谐波信号进行分析,有
(29)
即MRTOGIFO能消除5、7次谐波分量。
4)对高次谐波信号的影响
当wh w7时,令s=jwh,代入式(18)、式(19),有
w7时,令s=jwh,代入式(18)、式(19),有
 (30)
(30)
 (31)
(31)
根据式(17)、式(23)、式(30)和式(31)可得
 (32)
(32)
由式(32)可以看出,MRTOGIFO的高次谐波抑制能力与TOGIFO相同。
5)对基频附近信号的影响
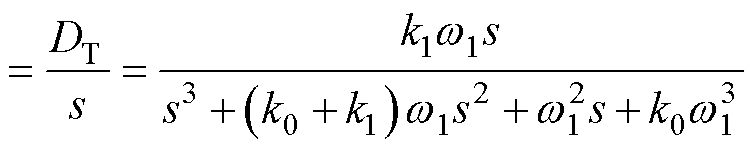
基波频率w1=100 rad/s,k1=1.414,k5=k1/5,k7=k1/7,k0取不同值时TOGIFO与MRTOGIFO的Bode图如图5所示。由图5可知,在基频附近MRTOGIFO幅频增益的谐振尖峰比TOGIFO小得多,对系统动态性能造成的影响更小。
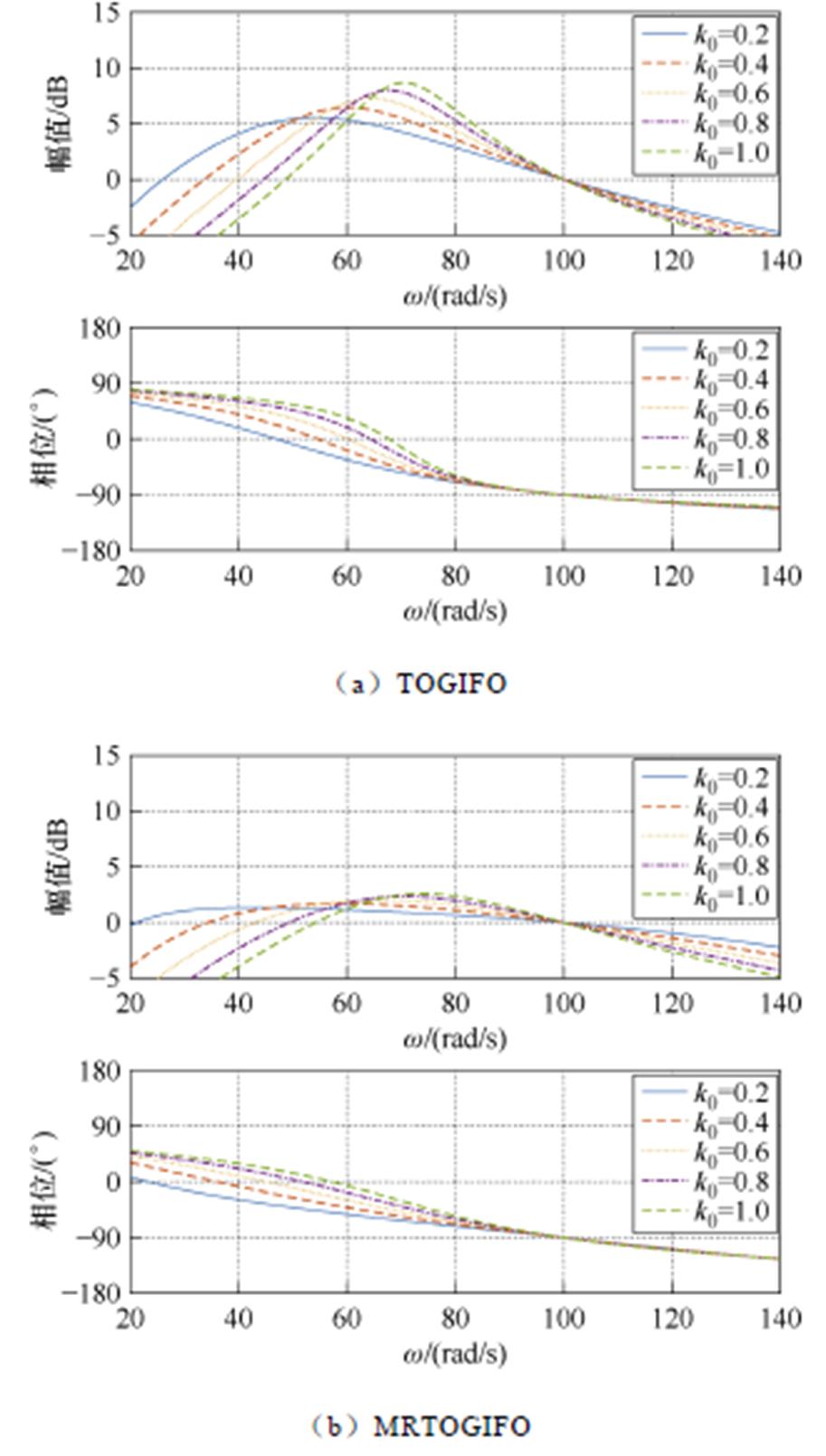
图5 k0取不同值时TOGIFO与MRTOGIFO的Bode图
Fig.5 Bode plots of MRTOGIFO and TOGIFO with different k0
综上所述,所提MRTOGIFO能够消除PMSM磁链观测值中的直流偏置分量,复系数谐振单元构成的交叉反馈网络对5、7次谐波进行消除,且抑制了基波频率附近的谐振尖峰,MRTOGIFO有着更好的磁链观测精度。
通过Bode图对比FOI、LPF、SOGIFO、TOGIFO、MRTOGIFO的性能,中心角频率为100 rad/s,LPF截止频率为100 rad/s,SOGIFO的参数ks1=1.414,TOGIFO的参数k0=1,k1=1.414,MRTOGIFO的参数k0、k1、k5、k7分别设置为1、1.414、k1/5、k1/7。
不同磁链观测器的Bode图如图6所示。由图6可知,FOI无法抑制直流偏置导致饱和。LPF虽然对谐波分量有抑制作用,但也抑制了基波信号,且基波信号有相移。SOGIFO、TOGIFO、MRTOGIFO均可对高次谐波起到良好的抑制,但SOGIFO无法抑制直流偏置,TOGIFO对5、7次谐波的抑制与SOGIFO相同,在约70 rad/s处出现了幅值10 dB的谐振尖峰。而MRTOGIFO在抑制直流偏置的同时有着更平缓的通带,在消除了5、7谐波信号干扰的情况下,谐振尖峰更小,磁链观测结果比TOGIFO和SOGIFO更准确。
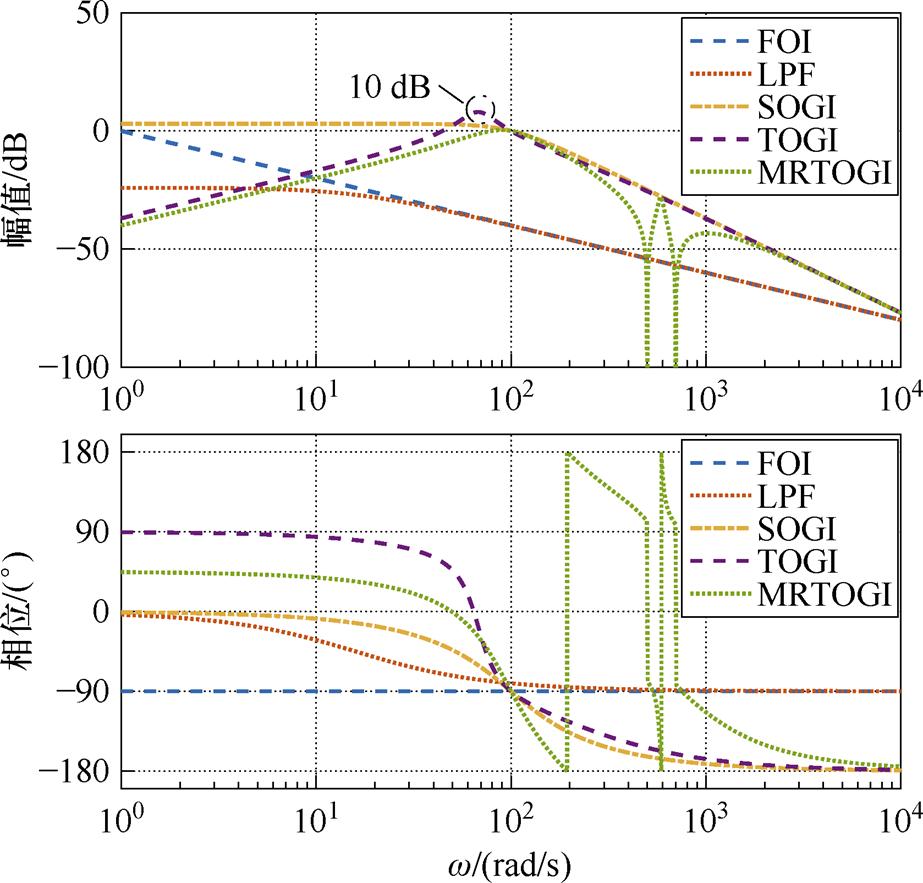
图6 不同磁链观测器的Bode图
Fig.6 Bode plots of different flux observers
图7为k0、k1改变时MRTOGIFO的Bode图和零极点分布。从图中可以看出,k1增大时,系统极点逐渐左移,提高了观测器的带宽,但是会削弱观测器对高次谐波的抑制效果。但过大的k1又会使得系统的极点向虚轴靠近,降低了系统性能。k0为直流通道的增益,k0过小会减慢系统对直流偏置的估计速度,而增大k0虽然能加快估计速度,但会导致极点右移,过大还会引起估计值的振荡,故在实际应用中,可以适当减小k0以提高系统的稳定性。
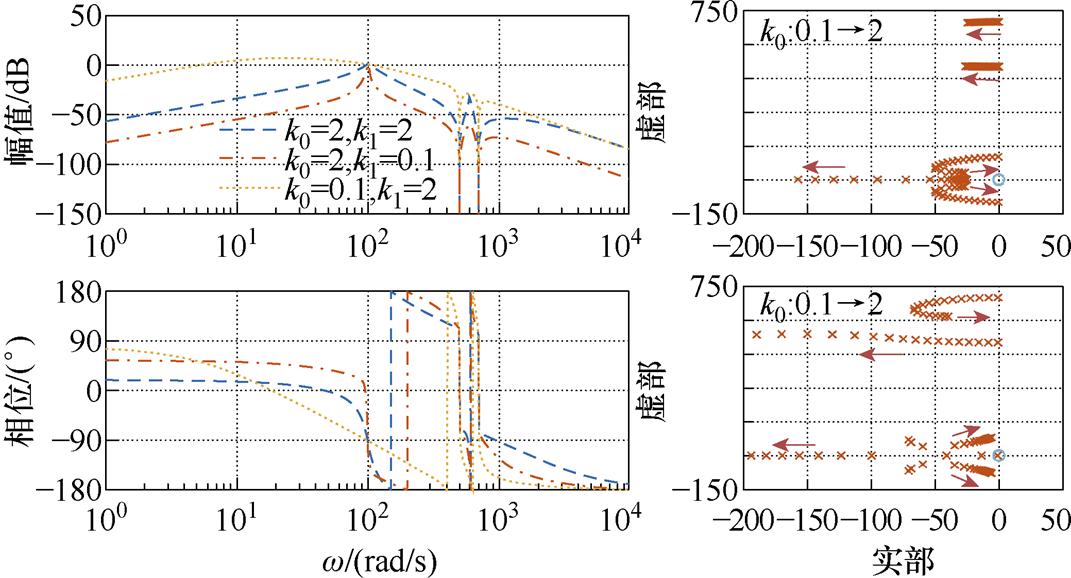
图7 k0、k1改变时的Bode图和零极点分布
Fig.7 Bode plots and pole-zero maps with different k0,k1
基波通道的参数k1通常设置为1.414。而k0的取值,可以使用待定系数法,根据式(17),假设TOGI的三个极点拥有相同的实部[15],有

 (33)
(33)
式中,a、b分别为极点的实部和虚部。则k0的取值需满足
 (34)
(34)
由式(34)得,当k1=1.414时,k0约为0.22。
设计RU时,为了让其与基波通道拥有相同的带宽,可以取k5=k1/5、k7=k1/7。
无位置传感器控制系统结构如图8所示。图9为样机验证平台,一台800 W PMSM连接有转矩传感器后再连接一台磁粉制动器,电机详细参数见表1。由MOSFET构成三相桥式逆变器驱动,主控芯片采用STM32G431CBU6,开关频率为20 kHz,采样频率为20 kHz,采样数据通过通用异步收发传输器(Universal Asynchronous Receiver/Transmitter, UART)将数据传至上位机,最后通过Matlab将数据绘制成实验波形。
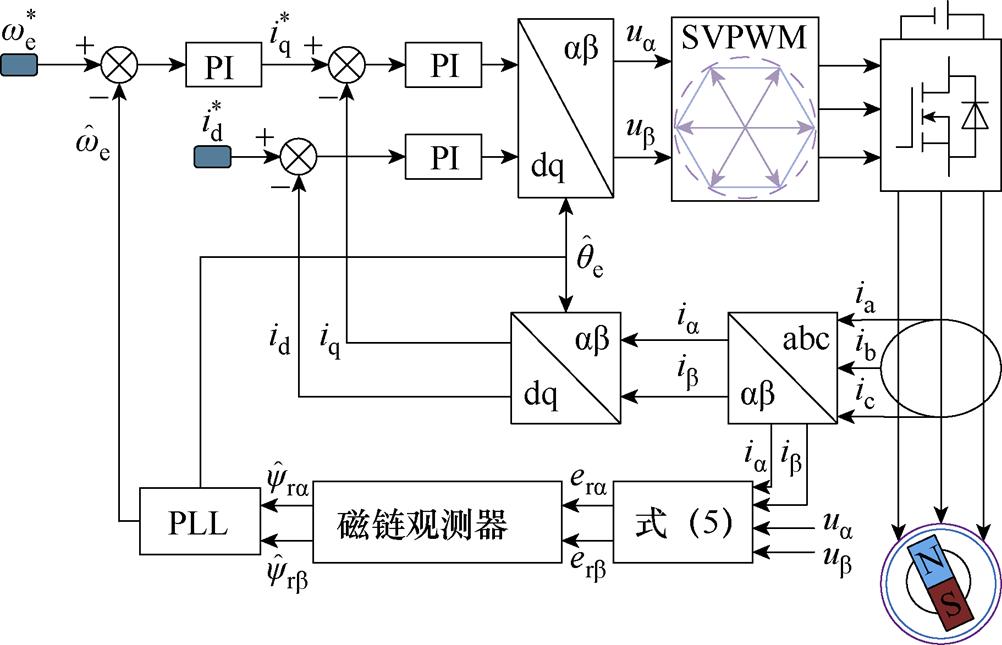
图8 基于磁链观测器的无位置传感器控制结构
Fig.8 Diagram of sensorless control with a flux observer
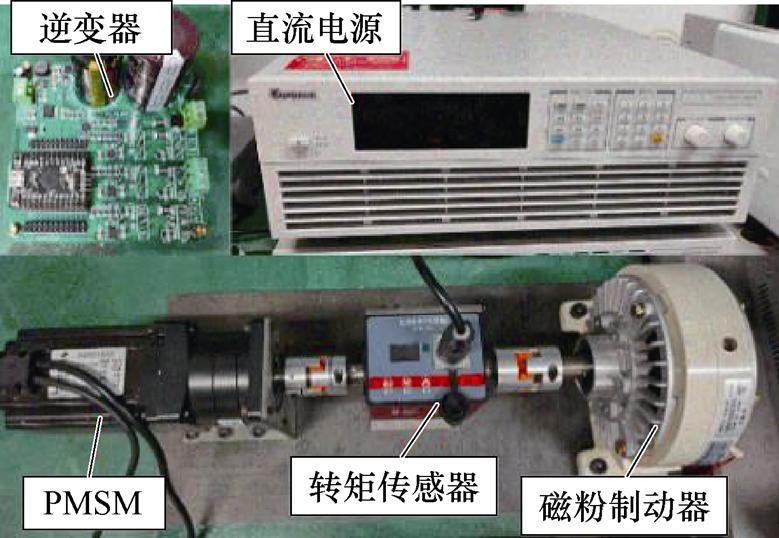
图9 样机实验平台
Fig.9 Prototype experimental platform
表1 永磁同步电机参数
Tab.1 Parameters of PMSM
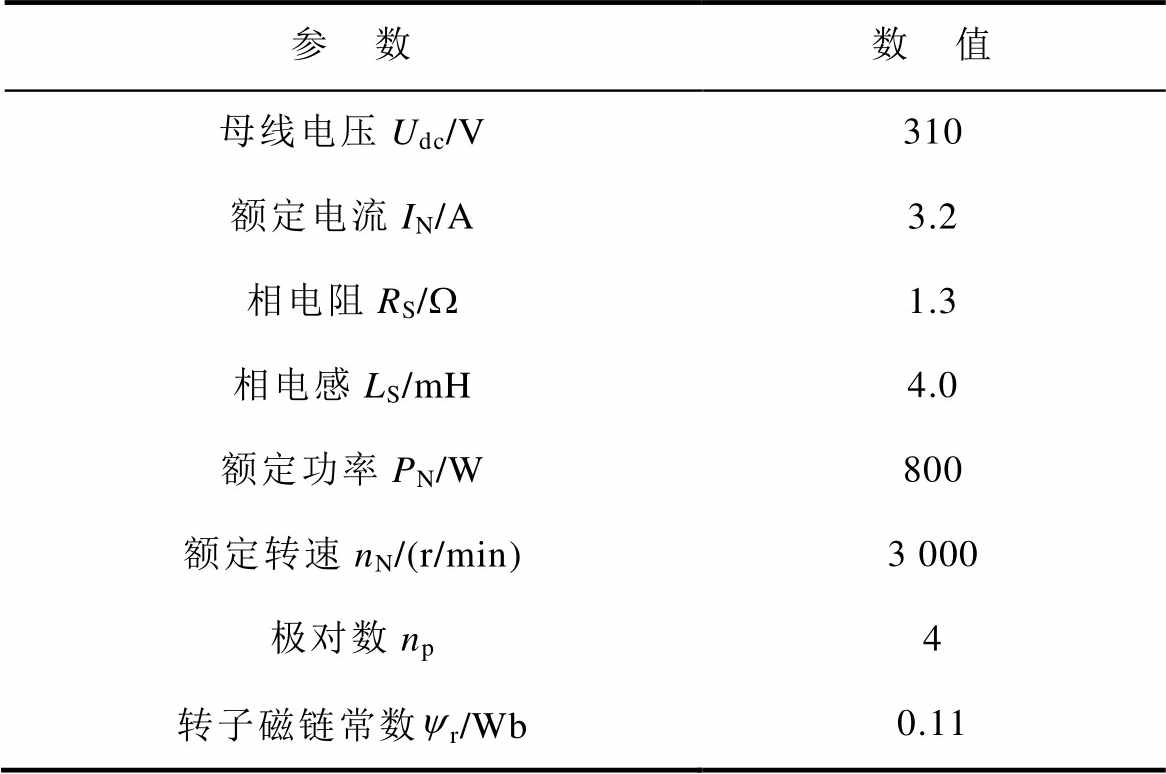
参 数数 值 母线电压Udc/V310 额定电流IN/A3.2 相电阻RS/W1.3 相电感LS/mH4.0 额定功率PN/W800 额定转速nN/(r/min)3 000 极对数np4 转子磁链常数yr/Wb0.11
分别采用FOI、LPF、SOGIFO、TOGIFO、MRTOGIFO五种方法对电机转子磁链进行观测。设定SOGIFO增益ks1=1.414,TOGIFO增益k0=0.25、k1=1.414,MRTOGIF增益k0=0.25、k1=1.414、k5=k1/5, k7=k1/7。
600 r/min转速下,五种方法对电机转子磁链观测结果如图10所示。FOI受到积分初值的影响,图10a中转子磁链产生了直流偏置,导致计算的转子位置发生振荡,完全无法获取电机转子的真实位置。图10b中LPF的磁链观测幅值比参考值低,仅为0.072 4 Wb,相位也产生了偏移,计算的转子位置与真实位置之间存在约1.12 rad的误差,与理论分析一致。而由SOGIFO、TOGIFO和MRTOGIFO提取的转子位置估计误差峰值均小于0.1 rad,表明在没有直流偏置和谐波影响的情况下,SOGIFO、TOGIFO和MRTOGIFO的观测性能几乎相同。
图11为150 r/min(5%额定转速)转速时SOGIFO、TOGIFO和MRTOGIFO对转子磁链和位置的观测结果。由于转速降低,直流偏置与5、7次谐波的干扰影响加剧,导致SOGIFO转子磁链估计值发生畸变,ab轴磁链发生了0.021 Wb的直流偏置,计算的转子位置与真实位置之间的误差增大,峰峰值约为0.48 rad。TOGIFO有效地抑制了直流偏置,ab轴磁链直流偏移仅为0.006 5 Wb,但5、7次谐波使得转子位置估计误差出现了高频抖动,误差峰峰值约为0.33 rad。而MRTOGIFO依然能保持良好的观测性能,转子位置估计误差峰峰值约为0.23 rad,仅为SOGIFO的48%,TOGIFO的70%。
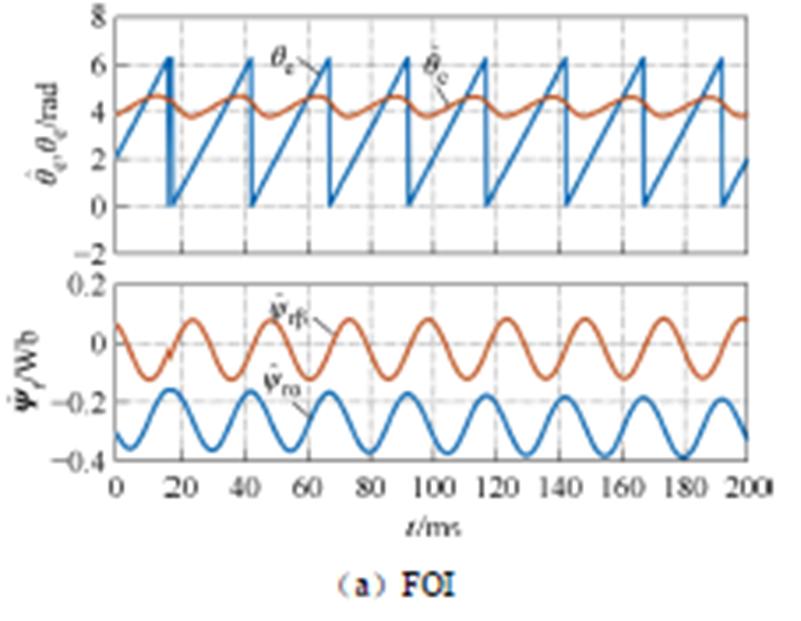
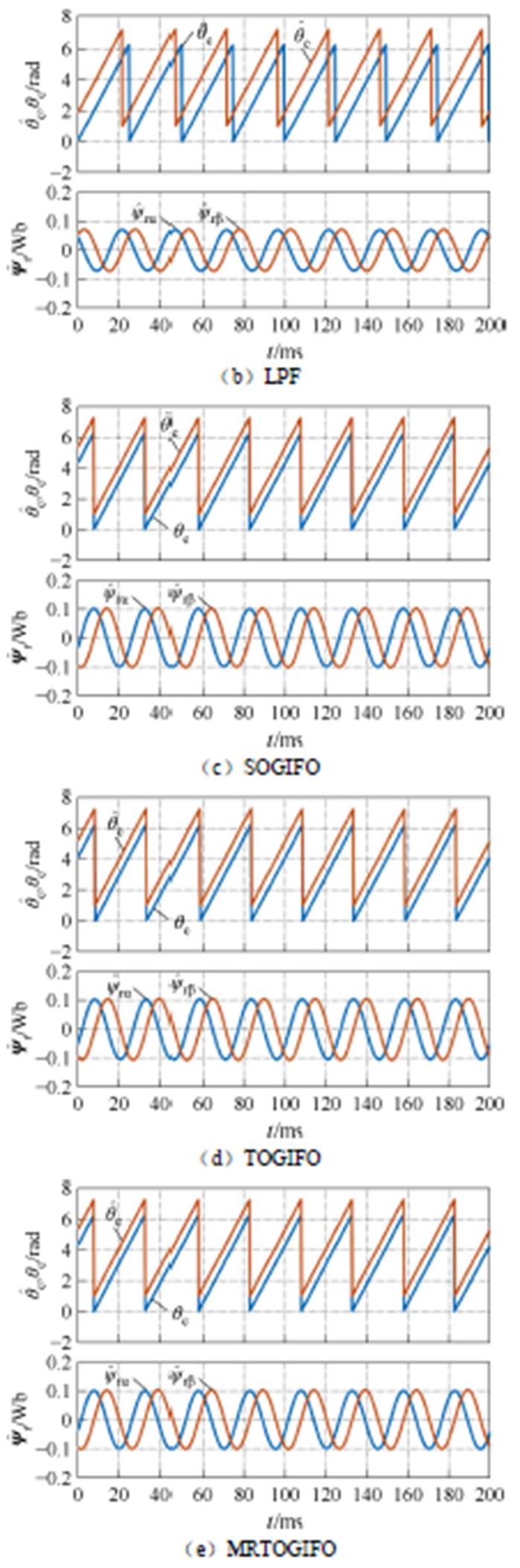
图10 600 r/min转速下对磁链和位置的观测结果
Fig.10 The observed flux and rotor position at 600 r/min
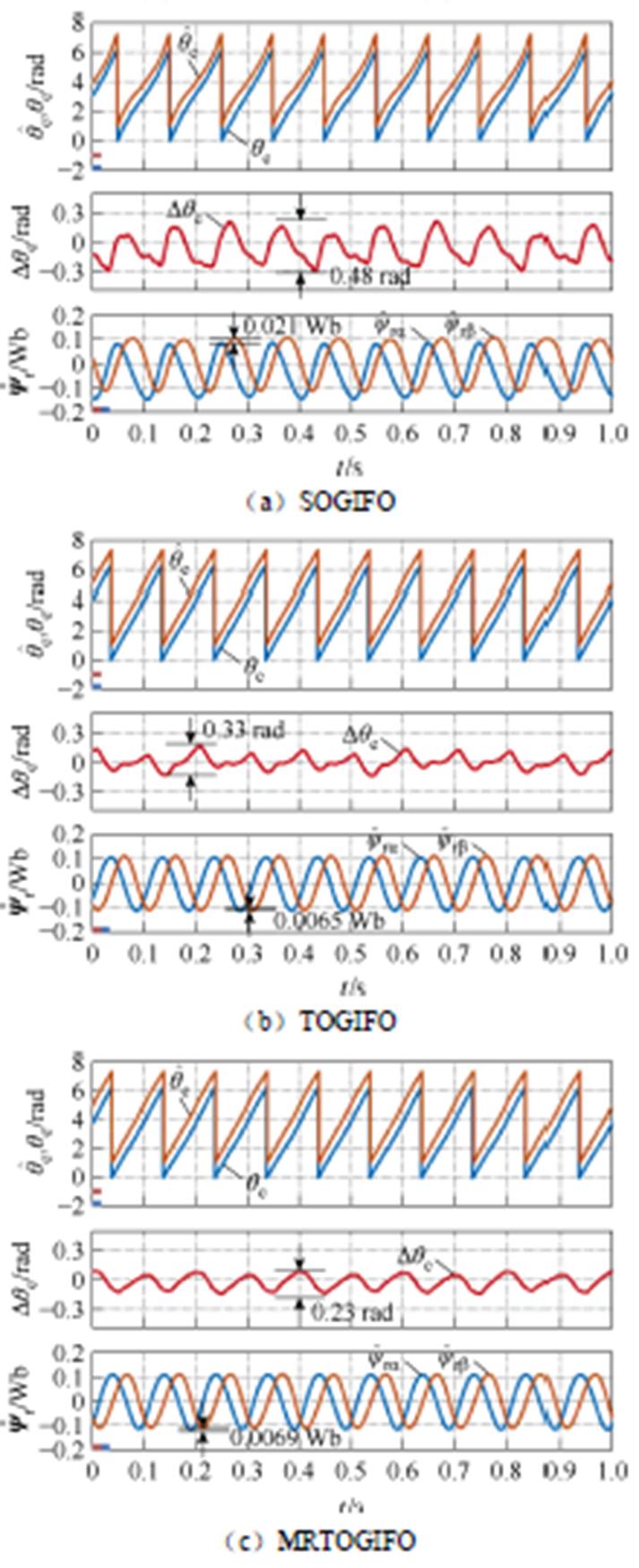
图11 150 r/min转速下对磁链和位置的观测结果
Fig.11 The observed flux and rotor position at 150 r/min
图12为150 r/min转速下转子磁链的二维、三维图。由图12可知,SOGIF转子磁链轨迹严重偏离了理想轨迹。TOGIFO、MRTOGIFO的转子磁链观测轨迹与理想轨迹的偏离程度几乎相同,但TOGIFO受到5、7次谐波的影响,转子磁链轨迹出现了抖动。
图13展示了150 r/min下SOGIFO、TOGIFO和MRTOGIFO转子磁链的快速傅里叶变换(Fast Fourier Transform, FFT)分析。如图13所示,在150 r/min下,SOGIFO转子磁链中含有31%的直流分量、0.66%的5次谐波和0.19%的7次谐波。TOGIFO能有效抑制直流偏置,转子磁链中含有0.09%的直流分量,但谐波抑制能力与SOGIFO相似,其磁链观测值中含有0.88%的5次谐波和0.22%的7次谐波。而MRTOGIFO转子磁链中的直流、5次和7次谐波含量仅有0.12%、0.023%和0.008 1%。这表明,MRTOGIFO能更有效地抑制直流偏置和5、7次谐波对观测结果的影响。
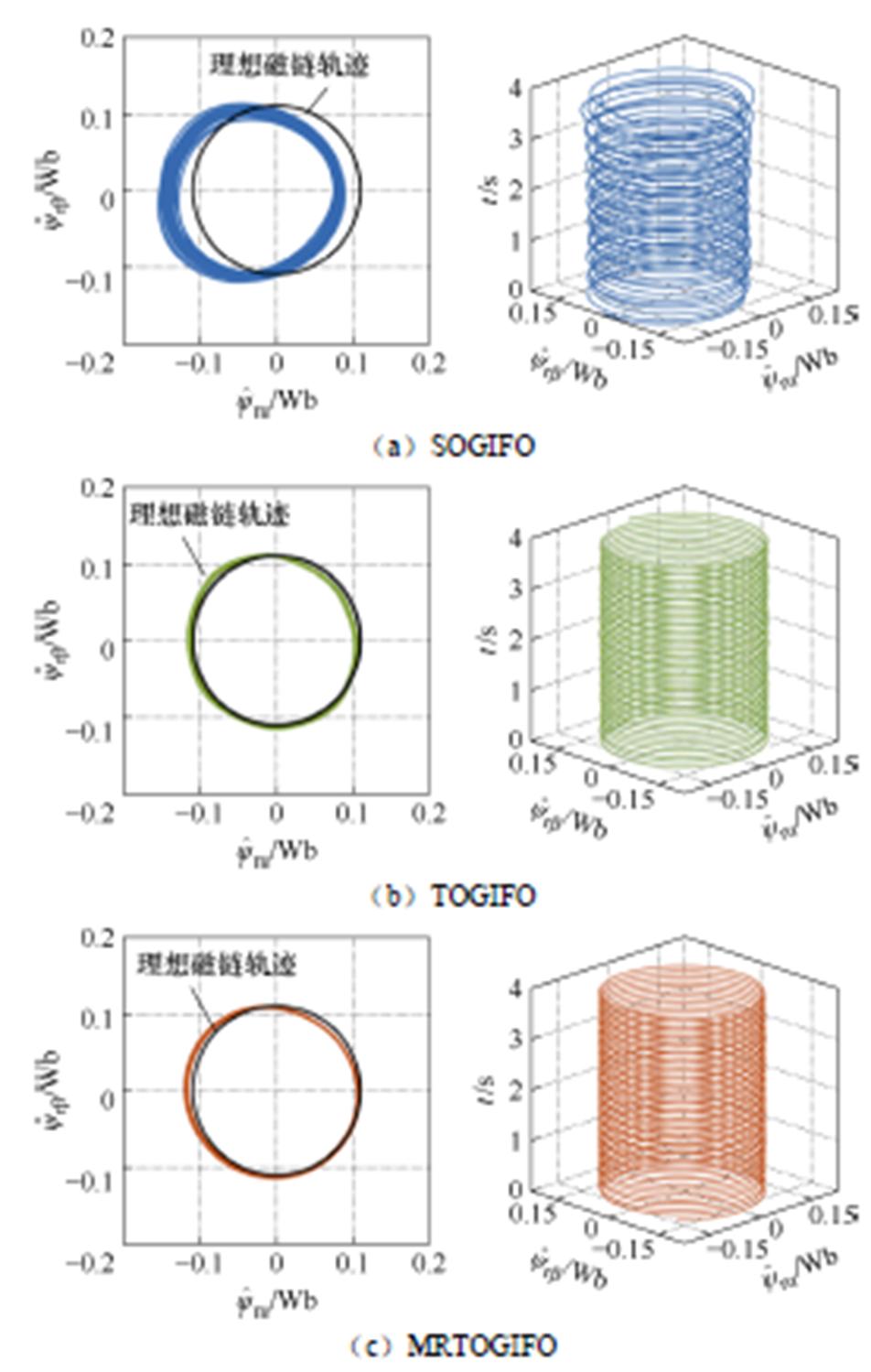
图12 150 r/min转速下转子磁链的二维图和三维图
Fig.12 Two-dimensional and three-dimensional rotor flux trajectories at 150 r/min
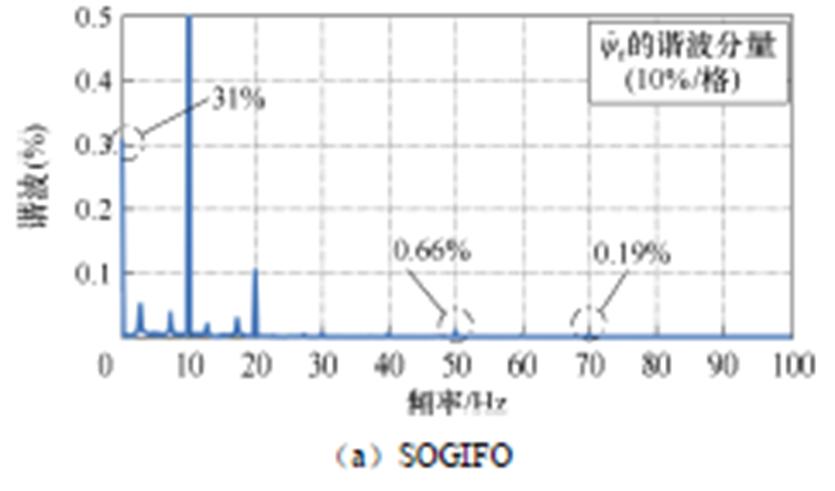
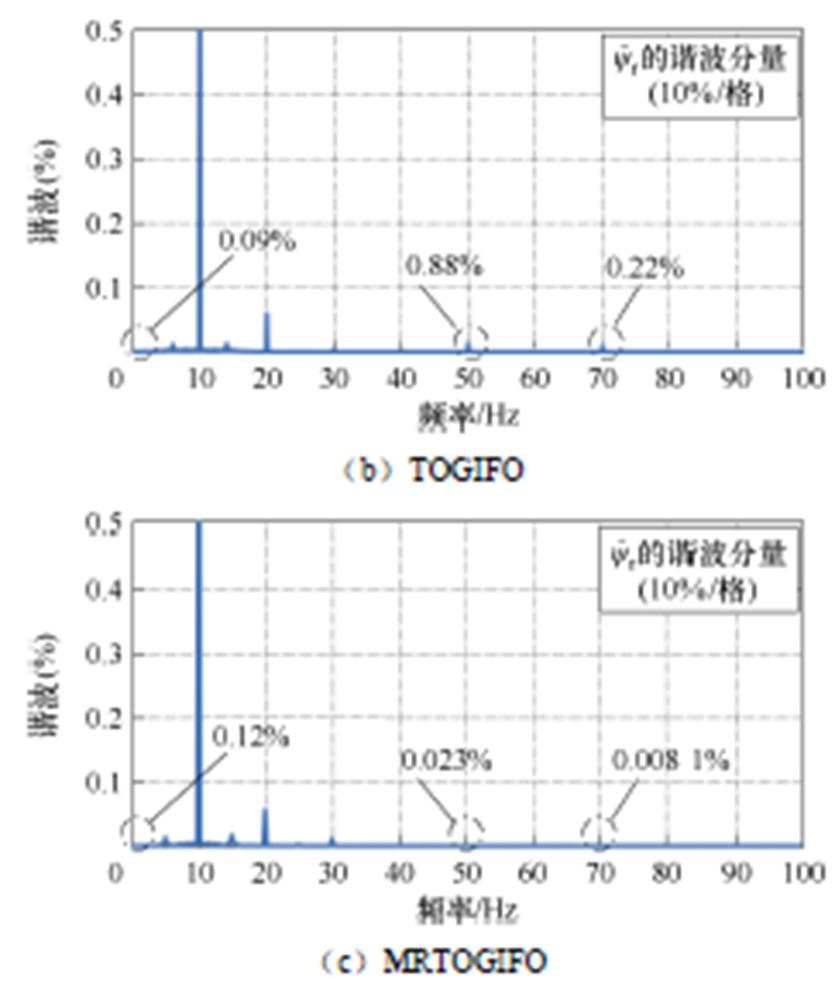
图13 150 r/min下磁链观测值的FFT
Fig.13 The FFT of observed rotor flux at 150 r/min
为模拟实际电机在运行时因积分初值未知、测量误差、电源扰动等原因产生的直流偏置,在a轴电动势叠加了+1 V的直流偏置扰动信号。此情况下,SOGIFO、TOGIFO和MRTOGIFO估计的转子磁链与位置如图14所示。在直流偏置扰动下,SOGIFO的b轴磁链出现了0.006 Wb的直流偏移,导致计算的转子位置中产生了一个峰峰值为0.21 rad的观测误差。TOGIFO的b轴磁链直流偏移为0.002 2 Wb,转子位置观测误差为0.14 rad。MRTOGIFO的b轴磁链中仅存0.001 1 Wb的直流偏移,计算的转子位置更为精确,观测误差仅为0.1 rad。
为了研究了所提控制算法的动态性能,在a轴电动势叠加了+1 V的直流偏置扰动信号,电机转速从600 r/min加速到1 200 r/min,实验结果如图15所示。如图15所示,600 r/min时SOGIFO转速误差波动为154 r/min,转子位置观测误差波动为0.27 rad。电机转速从600 r/min升至1 200 r/min时转速、位置观测误差同时减小,这是因为SOGIFO直流偏置抑制性能与输入信号频率呈正相关,转速升高时电机反电动势的基波频率上升,降低了直流偏置导致的观测误差。TOGIFO稳态时转速、位置观测误差波动为56 r/min和0.14 rad,这表明TOGIFO在稳态时能有效地抑制直流偏置干扰。但在转速上升或下降的动态过程中,转子位置观测误差最大达到0.12 rad。MRTOGIFO稳态时转速估计误差波动为42 r/min,是SOGIFO的27.3%,TOGIFO的75%。转子位置观测误差波动在0.12 rad以内,比SOGIFO减小55.6%,比TOGIFO减小14.3%。且在转速上升或下降的动态过程中,MRTOGIFO转子位置观测误差最大仅为0.079 rad,比TOGIFO减小34.2%。表明MRTOGIFO在动态转速下的稳定性和抗干扰能力都要优于SOGIFO与TOGIFO。
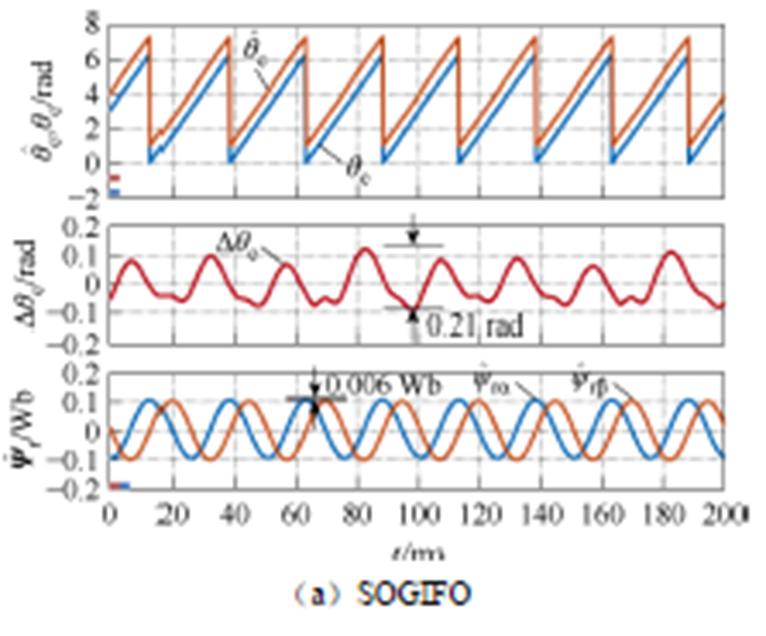
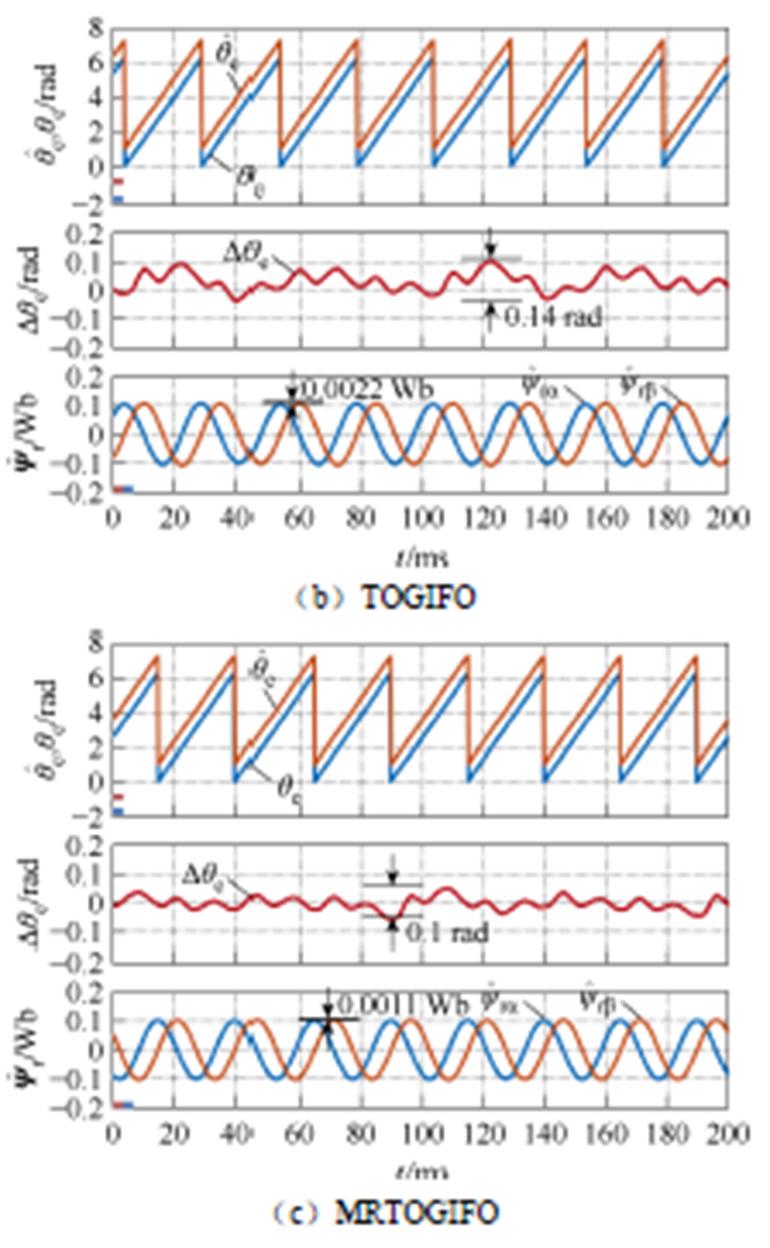
图14 600 r/min加1 V直流偏置时磁链和位置的观测结果
Fig.14 Observed rotor flux and rotor position at 600 r/min with a 1 V DC disturbance
将参考转速由600 r/min缓慢降低至0 r/min,对比所提MRTOGIFO与SOGIFO、TOGIFO实验结果,如图16所示。当电机转速降低至约200 r/min 时,SOGIFO控制的电机转速波动开始增大,转速下降至142 r/min(4.7%额定转速)时,转速观测误差开始发散,电机转速控制进入失稳状态。TOGIFO控制的电机在转速降低至约114 r/min(3.8%额定转速)时出现失稳现象。而MRTOGIFO能在更低的转速下,对转子磁链进行准确地估计,在转速降低至约91 r/min(3%额定转速)时才会出现失稳现象。表明MRTOGIFO有着比SOGIFO、TOGIFO更宽的调速范围,且对电机转子角度和角速度的观测精度更高。
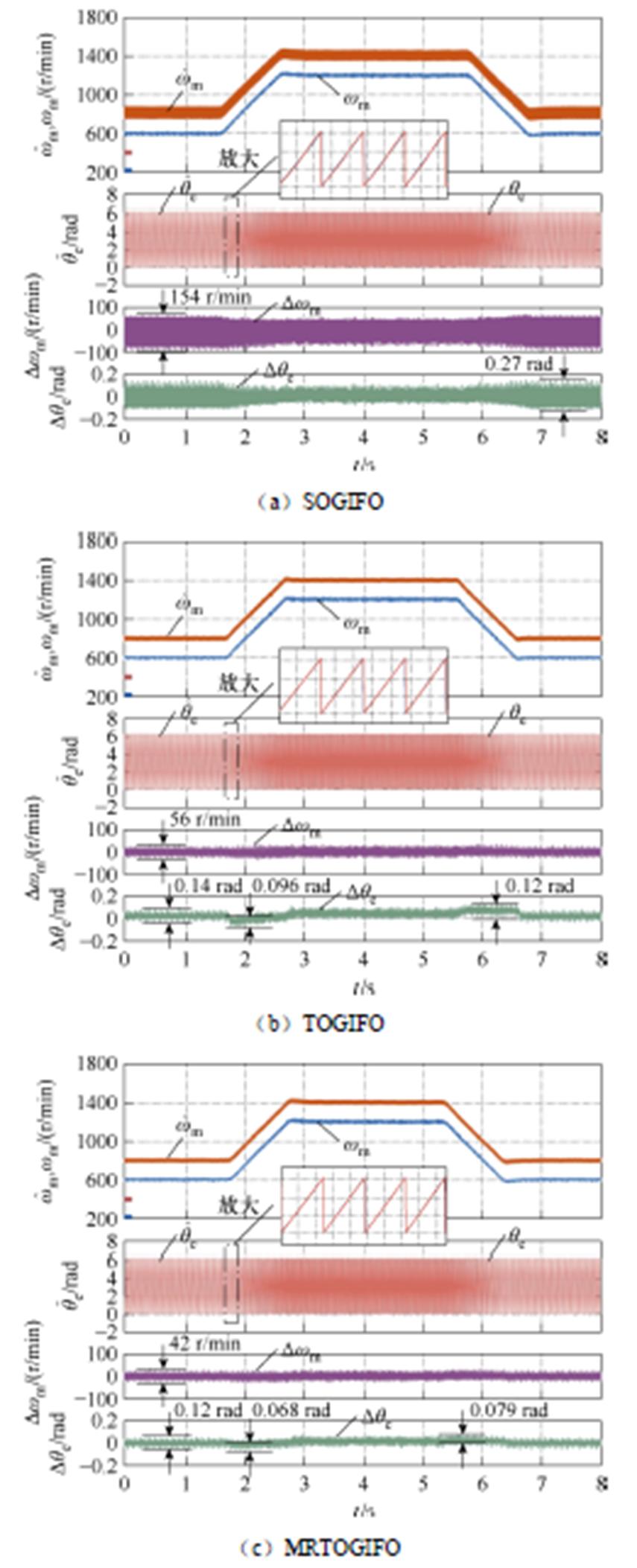
图15 转速变化和1 V直流扰动下对位置和转速的估计结果
Fig.15 Observed rotor position and speed with speed change and a 1 V DC disturbance
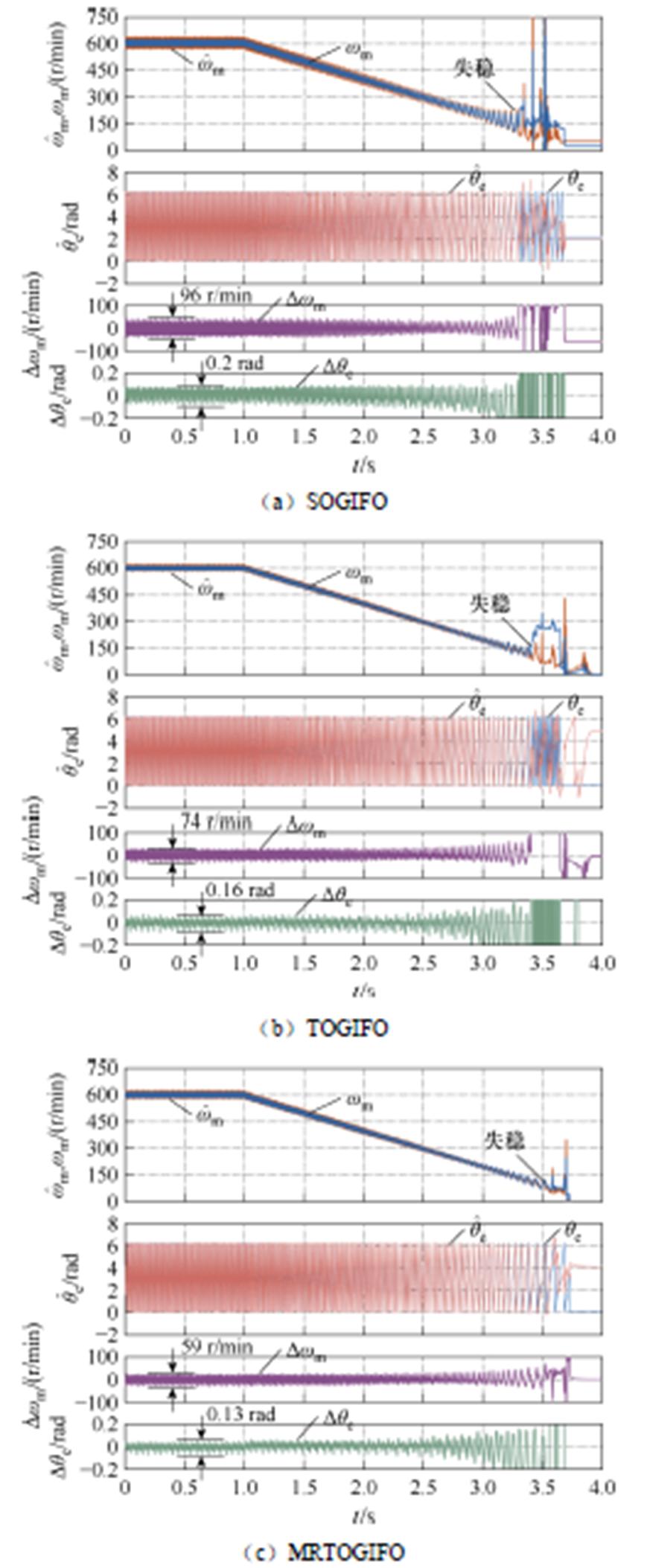
图16 600 r/min到0 r/min下对位置和转速的估计结果
Fig.16 Observed rotor position and speed from 600 r/min to 0 r/min
图17给出了负载变化(额定负载)下SOGIFO、TOGIFO和MRTOGIFO的实验对比结果。由图17可知,在突加负载的情况下,SOGIFO的电机转速误差波动为85 r/min,转子位置观测误差波动在0.15 rad。TOGIFO的电机转速误差波动为85 r/min,转子位置观测误差波动为0.13 rad。而MRTOGIFO转子转速和位置观测误差约为70 r/min和0.1 rad。
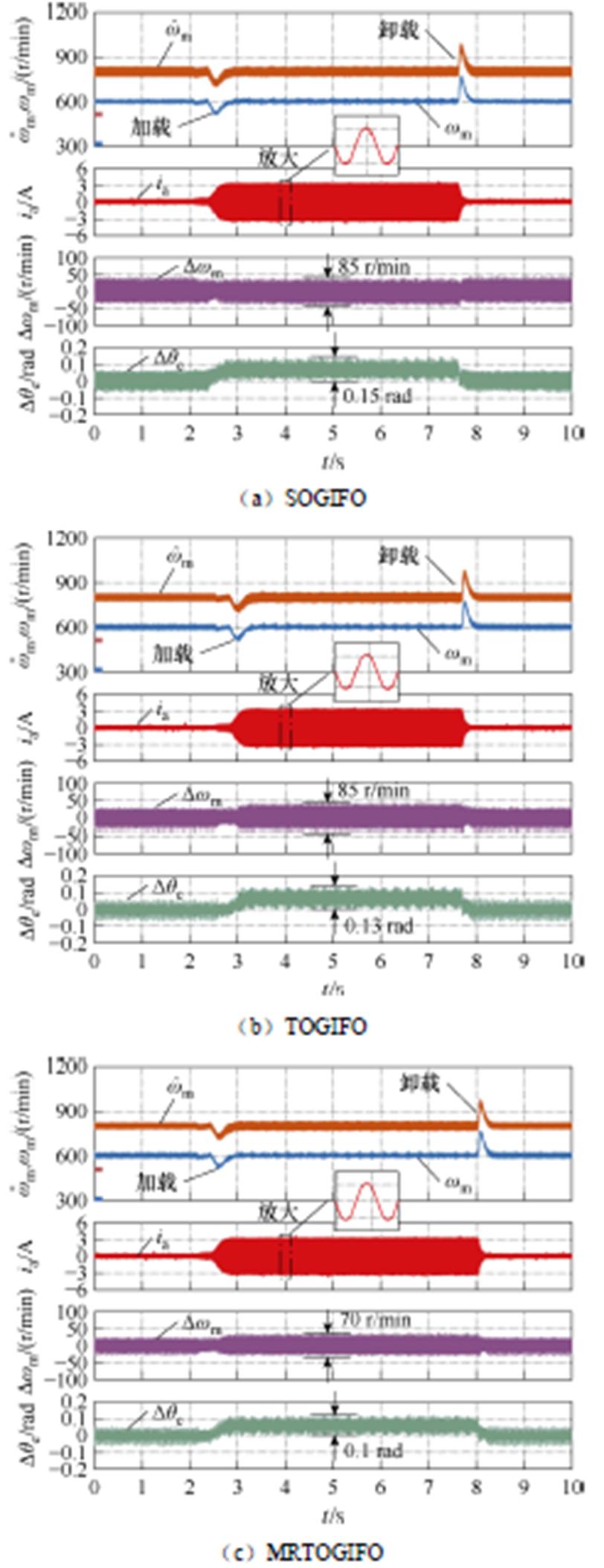
图17 变负载情况下对位置和转速的估计结果
Fig.17 Observed rotor position and speed with load changes
分析传统磁链观测方法中直流偏置和5、7次谐波对磁链估计结果的影响,指出传统磁链观测器对直流偏置和5、7次谐波干扰的抑制能力不足。结合TOGI和RU构成交叉反馈网络,设计了MRTOGIFO,基于传递函数和Bode图分析得出MRTOGIFO能够消除直流偏置和5、7次谐波扰动对磁链估计结果的影响。通过PLL从估计的转子磁链基波分量中提取出准确的转子位置和转速。实验结果验证了基于MRTOGIFO的PMSM无位置传感器控制系统有着更好的抗干扰能力。
参考文献
[1] 李福, 陈双琛, 兰志勇, 等. 基于改进型I-f控制的永磁同步电机无位置控制[J]. 电工技术学报, 2025, 40(12): 3895-3904.
Li Fu, Chen Shuangchen, Lan Zhiyong, et al. Sensor- less control of permanent magnet synchronous motor based on improved I-f control[J]. Transactions of China Electrotechnical Society, 2025, 40(12): 3895- 3904.
[2] 葛扬, 宋卫章, 杨洋. 基于扩张式主从自适应陷波滤波器与动态频率跟踪的永磁同步电机无传感器控制[J]. 电工技术学报, 2023, 38(14): 3824-3835.
Ge Yang, Song Weizhang, Yang Yang. PMSM sensor- less control based on extended master-slave adaptive Notch filter and dynamic frequency tracking[J]. Transactions of China Electrotechnical Society, 2023, 38(14): 3824-3835.
[3] 于安博, 刘利, 阚志忠, 等. 高频脉振信号注入永磁同步电机无滤波器初始位置辨识方法[J]. 电工技术学报, 2021, 36(4): 801-809.
Yu Anbo, Liu Li, Kan Zhizhong, et al. Initial position identification of PMSM with filterless high frequency pulse signal injection method[J]. Transactions of China Electrotechnical Society, 2021, 36(4): 801- 809.
[4] 孙明阳, 和阳, 邱先群, 等. 随机频率三角波注入永磁同步电机无位置传感器降噪控制[J]. 电工技术学报, 2023, 38(6): 1460-1471.
Sun Mingyang, He Yang, Qiu Xianqun, et al. Random-frequency triangular wave injection based sensorless control of PMSM drives for audible noise reduction[J]. Transactions of China Electrotechnical Society, 2023, 38(6): 1460-1471.
[5] Wang Bo, Du Pengcheng, Tian Minghe, et al. A master-slave-structure position observer for multi- harmonics suppression in sensorless PMSM drives[J]. IEEE Transactions on Industrial Electronics, 2024, 71(5): 4528-4540.
[6] 王琛琛, 苟立峰, 周明磊, 等. 基于改进的离散域二阶滑模观测器的内置式永磁同步电机无位置传感器控制[J]. 电工技术学报, 2023, 38(2): 387-397.
Wang Chenchen, Gou Lifeng, Zhou Minglei, et al. Sensorless control of IPMSM based on improved discrete second-order sliding mode observer[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 387-397.
[7] Dian Renjun, Zhang Junhe, Jiang Yajie. Improved MOGIFO-based flux observation strategy for PMSM sensorless drives[J]. IEEE Access, 2024, 12: 28475- 28483.
[8] 周臻, 李长磊, 王永. 基于复合二阶广义积分器的永磁同步电机转子位置与转速估计[J]. 电工技术学报, 2017, 32(7): 59-66.
Zhou Zhen, Li Changlei, Wang Yong. Position and speed estimation for a permanent magnet synchronous motor rotor using composite second order generalized integrator[J]. Transactions of China Electrotechnical Society, 2017, 32(7): 59-66.
[9] Zhao Rende, Wu Shangqian, Wang Cun, et al. A novel discretization method for multiple second-order generalized integrators[J]. IEEE Transactions on Power Electronics, 2021, 36(10): 10998-11002.
[10] Golestan S, Guerrero J M, Vasquez J C, et al. Modeling, tuning, and performance comparison of second-order-generalized-integrator-based FLLs[J]. IEEE Transactions on Power Electronics, 2018, 33(12): 10229-10239.
[11] Wang Huimin, Yang Yongheng, Ge Xinglai, et al. PLL- and FLL-based speed estimation schemes for speed-sensorless control of induction motor drives: review and new attempts[J]. IEEE Transactions on Power Electronics, 2022, 37(3): 3334-3356.
[12] 李东昇, 袁杰, 王坤东. SOGI级联SFNF的高频注入无传感器电机控制方法[J]. 电机与控制学报, 2024, 28(3): 24-32.
Li Dongsheng, Yuan Jie, Wang Kundong. High frequency injection sensor-less motor control method with cascade of SOGI and SFNF[J]. Electric Machines and Control, 2024, 28(3): 24-32.
[13] Wang Gaolin, Ding Li, Li Zhuomin, et al. Enhanced position observer using second-order generalized integrator for sensorless interior permanent magnet synchronous motor drives[J]. IEEE Transactions on Energy Conversion, 2014, 29(2): 486-495.
[14] Xu Wei, Jiang Yajie, Mu Chaoxu, et al. Improved nonlinear flux observer-based second-order SOIFO for PMSM sensorless control[J]. IEEE Transactions on Power Electronics, 2019, 34(1): 565-579.
[15] Jiang Yajie, Xu Wei, Mu Chaoxu, et al. An improved third-order generalized integral flux observer for sensorless drive of PMSMs[J]. IEEE Transactions on Industrial Electronics, 2019, 66(12): 9149-9160.
[16] Zhang Yanping, Yin Zhonggang, Gao Fengtao, et al. Research on anti-DC bias and high-order harmonics of a fifth-order flux observer for IPMSM sensorless drive[J]. IEEE Transactions on Industrial Electronics, 2022, 69(4): 3393-3406.
[17] He Wenyun, Wu Xiang, Chen Junlei. Optimization design of PMSM sensorless control using generalized integrator[J]. IEEE Transactions on Industrial Electronics, 2024, 71(8): 8625-8634.
[18] Hackl C M, Landerer M. Modified second-order generalized integrators with modified frequency locked loop for fast harmonics estimation of distorted single-phase signals[J]. IEEE Transactions on Power Electronics, 2020, 35(3): 3298-3309.
[19] Ge Yang, Yang Lihui, Ma Xikui. A harmonic com- pensation method for SPMSM sensorless control based on the orthogonal master-slave adaptive Notch filter[J]. IEEE Transactions on Power Electronics, 2021, 36(10): 11701-11711.
[20] Kashif M, Singh B. Multi-resonant third-order generalized integrator based PLL for seamless control of solar-battery fed grid synchronized water pumping system[J]. IEEE Transactions on Energy Conversion, 2023, 38(1): 355-366.
Abstract Sensorless control of permanent magnet synchronous motors (PMSMs) requires real-time acquisition of high-precision magnetic flux information. The flux observer can determine the rotor magnetic flux position and angle by integrating the back electromotive force (EMF). However, it exhibits DC bias and low-order harmonics at low-speed range, which degrade estimation accuracy and increase the risk of instability. Thus, this paper proposes a mixed multi-resonant third-order generalized integral flux observer (MRTOGIFO). Firstly, the theoretical analysis was conducted on the suppression performance of DC bias and low-order harmonics between traditional magnetic flux observers, second-order generalized integral magnetic flux observers (SOGIFO), and third-order generalized integral magnetic flux observers (TOGIFO). Secondly, the notch circuit of the third-order generalized integrator (TOGI) is used to extract the DC bias, and a complex- coefficient resonant unit is proposed to separate low-order harmonic interference. A cross-feedback network is designed to eliminate the DC bias and low-order harmonic interference from the observed signal. Therefore, the real information of the rotor flux is obtained, and the accuracy of the flux observer is improved. Moreover, the block diagram and the transfer function of the MRTOGIFO are presented, and the influence of the proposed flux observer on signals such as DC bias, fundamental wave, and low-order harmonics is analyzed in the frequency domain. It has been shown that the MRTOGIFO weakens the resonance peak of TOGI at low frequencies and improves dynamic performance. Finally, an 800 W PMSM experimental platform is built to compare the steady-state accuracy and dynamic performance of different flux observers in the low-speed range. The experimental results validated that the proposed strategy has a wider speed range and higher observing accuracy.
Keywords:Permanent magnet synchronous motor (PMSM), sensorless control, field-oriented control, flux estimation, flux observers
中图分类号:TM614
DOI: 10.19595/j.cnki.1000-6753.tces.242178
国家自然科学基金资助项目(52277169)。
收稿日期 2024-12-03
改稿日期 2025-01-02
方 炜 男,1977年生,博士,教授,研究方向为功率变换技术、永磁同步电机驱动与控制。
E-mail: fangwei@ahut.edu.cn(通信作者)
王雷雨 男,2000年生,硕士研究生,研究方向为永磁同步电机的控制。
E-mail: 1395262560@qq.com
(编辑 崔文静)