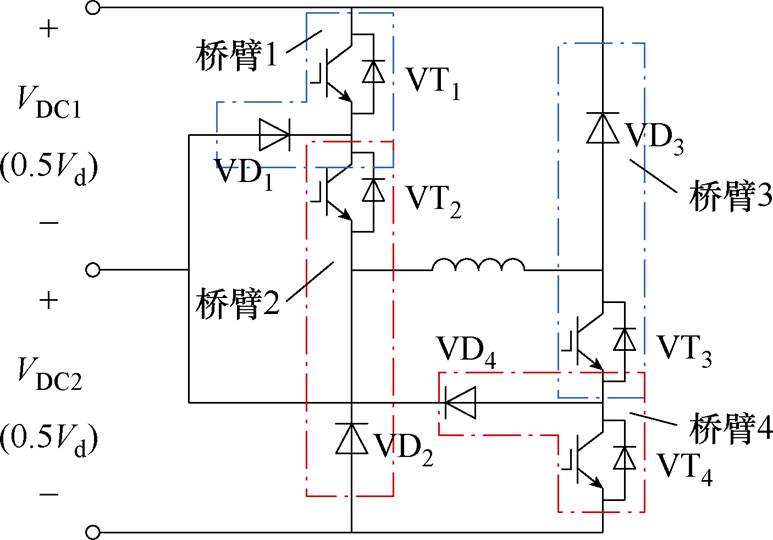
图1 五电平开关功率放大器拓扑结构
Fig.1 Topology structure of five level switching power amplifier
摘要 功率放大器是主动电磁轴承系统的核心执行部件。在满足带宽的前提下,较低的输入电压可以降低电磁干扰和开关损耗。传统的功率放大器输入电压固定,在面对不同转速及带宽要求时缺乏灵活性;此外,电路中的开关管长期高频动作易引发短路故障,严重制约系统的可靠性。该文首先提出一种新的具有短路容错能力的五电平开关功率放大器拓扑结构,该功率放大器拓扑可以输出0、±1/2Vdc和±Vdc五个电平,并根据跟踪误差在低压状态及高压状态下自动切换,从而减小功耗,降低电磁干扰。其次,基于该拓扑结构,提出了一种基于二极管电流检测的容错策略,实现了对开关功率放大器单个短路故障开关管的容错控制。以开关管关断时负载电流是否流经其所在桥臂中的二极管作为故障判断条件,控制器根据不同开关管的短路故障快速切换到相应的容错模式。最后,实验验证了所提具有短路容错能力的五电平开关功率放大器拓扑结构的合理性和可行性,以及对开关管短路故障的容错控制能力。
关键词:主动电磁轴承 开关功率放大器 短路故障 容错控制
主动电磁轴承(Active Magnetic Bearings, AMBs)凭借高转速、低损耗、高可控性等优势,在高速电机、鼓风机、储能飞轮等高速旋转机械中广泛应用[1-2]。功率放大器是AMBs的核心器件,负责将指令电流转化为磁轴承线圈中的电流,产生可控的电磁力来对转子系统进行控制。其性能要求包括高精度、高带宽等,以快速准确地响应系统指令。此外,当转子高速运转时,功率放大器故障可能导致旋转机械系统损坏甚至产生安全事故,因此,可靠性也是其重要指标。
在AMBs中,功率放大器的拓扑结构及控制策略一直是重要的研究课题。目前,三电平开关功率放大器被广泛应用,国内外学者已对其控制策略[3]及运行性能[4]等方面进行了深入研究。开关功率放大器的高动态响应能力依赖高输入电压。但高输入电压不仅会给开关管带来高电压应力[5],增加器件的开关损耗[6-7],而且还会给电路带来较大的电磁干扰[8-12]。而三电平开关功率放大器,无论跟踪误差大小,均以相同的输入电压运行,实现方式不灵活且增加了电路的运行压力。多电平拓扑凭借其输出电平多、开关管电压应力低等优势[13-15],可基于跟踪误差调节电压工况,在保持动态响应的前提下有效降低电路的运行压力。
功率放大器的可靠性直接影响AMBs的稳定性。其电路中的开关管在高电压、大电流及高频开关的工况下易因过热或过载引发故障,威胁AMBs安全运行。因此,开展功率放大器的容错控制研究至关重要。目前,多数研究集中在开路容错方面。Jiang Dong等[16-18]通过反转电流重建电磁力,刘程子等[19]通过增加冗余桥臂,实现开路容错。然而,短路故障比开路故障更难处理,且后果更为严重。为防止短路故障导致负载线圈过电流,容错策略需具备快速检测和处理能力。Shuai Yixuan等[20]令故障侧的线圈进入恒流模式,仅由该自由度上的剩余线圈维持动态响应。刘程子等[21]则通过熔断机制实现故障桥臂和冗余桥臂间的切换。尽管现有容错策略可以实现短路容错,但响应时间均超过600 ms,这在一定程度上降低了AMBs在高速旋转状态下的稳定性。
针对上述问题,本文首先提出一种基于“小误差低电压、大误差高电压”原理,适用于AMBs的五电平开关功率放大器拓扑和控制策略。该拓扑通过串联开关管,降低电压应力,同时减少开关损耗和电磁干扰。然后提出一种基于二极管电流检测的容错策略,针对电路中单个开关管的短路故障实现容错控制。实验结果表明,该五电平开关功率放大器可以满足母线电压300 V、输出电流15 A的设计需求。在相同带宽下,器件损耗和电磁干扰低于三电平开关功率放大器。容错策略可在80 ms内完成故障识别与模式切换,大幅缩短容错时间,提高AMBs运行稳定性。
基于“小误差低电压、大误差高电压”的基本原理,本文提出了一种适用于AMBs,具有短路容错能力的五电平开关功率放大器的拓扑结构,具体结构如图1所示,图中,Vd为直流母线电压。
图1 五电平开关功率放大器拓扑结构
Fig.1 Topology structure of five level switching power amplifier
该五电平开关功率放大器的拓扑结构主要包括两个直流电源(VDC1、VDC2)和四个开关桥臂(桥臂1~桥臂4)。其中,每个桥臂j(j=1~4)均由一个开关管VTi和一个二极管VDj组成,并与一个直流电源VDCj(j=1~2)相并联。如果分别将结构中的直流电源VDC1及与其并联的桥臂1和桥臂3,以及直流电源VDC2及与其并联的桥臂2和桥臂4视作两个完整的半桥结构(半桥1、半桥2),则五电平开关功率放大器也可以看作两个半桥结构的串联形式。
1.1.1 低压状态运行
当跟踪误差较小时,五电平开关功率放大器电路在低压状态下运行,其运行过程如图2所示。在低压运行状态下,VT1处于始终关断状态,VT3处于始终导通状态;VT2、VT4根据调制规则连续执行导通和关断动作。此时,电路仅由VDC2单独供电,即可满足系统动态响应需求。
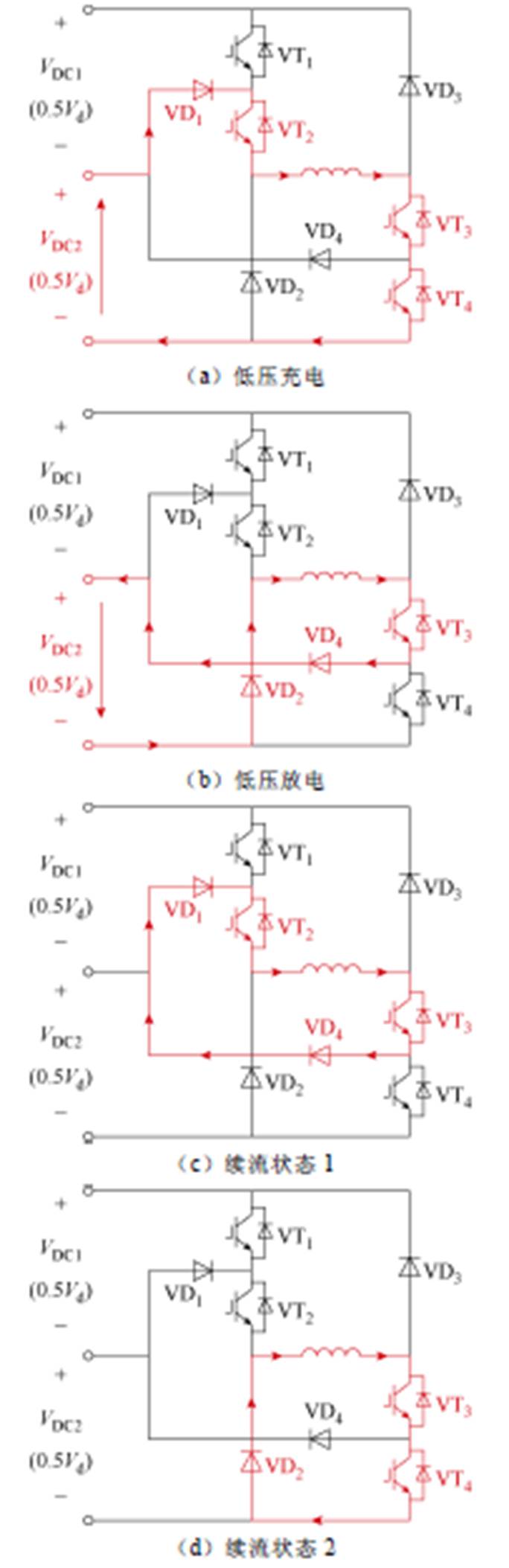
图2 低压状态下运行过程
Fig.2 Operation process under low voltage state
与传统三电平开关功率放大器运行过程相似,五电平开关功率放大器在低压运行时有三种工作状态:低压充电、低压放电和续流。
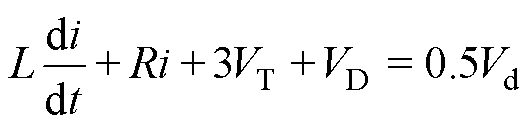
低压充电和低电压放电状态下,线圈中电流表达式分别为
 (1)
(1)
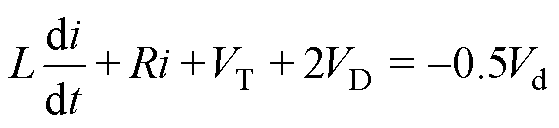 (2)
(2)
式中,L为磁轴承线圈的电感;R为线圈的电阻;i为负载线圈电流;VT及VD分别为开关管和二极管的导通压降。
由于线圈阻值和开关管的导通压降都比较小,若忽略其对电流变化的影响,则五电平开关功率放大器在低压充放电状态下的最大电流变化率为
 (3)
(3)
而传统开关功率放大器最大电流变化率[22]为
 (4)
(4)
通过上述分析可知,在低压运行状态下,五电平开关功率放大器电路的输入电压和最大电流变化率均为三电平开关功率放大器的一半。这种特性在低动态响应的工况下展现出优势:五电平开关功率放大器可以在满足系统动态响应要求的前提下采用更低的电压阶跃幅度(DV)和电流调节步长(Di)。降低电压阶跃幅度(DV)可以带来以下三重优势:首先,能够减少功率管承受的电压应力,降低功率管被电压击穿的风险[5];其次,通过缩小开关瞬态过程中电压与电流波形的重叠区域[6-7],从而减小开关损耗;此外,还可以抑制开关瞬态dV/dt,从而降低门极驱动电压[8-9]以及源漏极电压[10-12]的振荡尖峰。而更小的电流调节步长(Di)则具备更精确的电流跟踪调整能力,能够实现更细微的电流变化控制。它可以通过更小的阶跃快速逼近目标值,有效抑制超调现象,提升系统的稳定性和控制精度。
1.1.2 高压状态运行
当跟踪误差较大时,五电平开关功率放大器电路在高压状态下运行,其运行过程如图3所示。
在高压运行状态下,电路充、放电过程中的4个开关管全部导通、全部关断,电路由VDC1和VDC2串联供电。
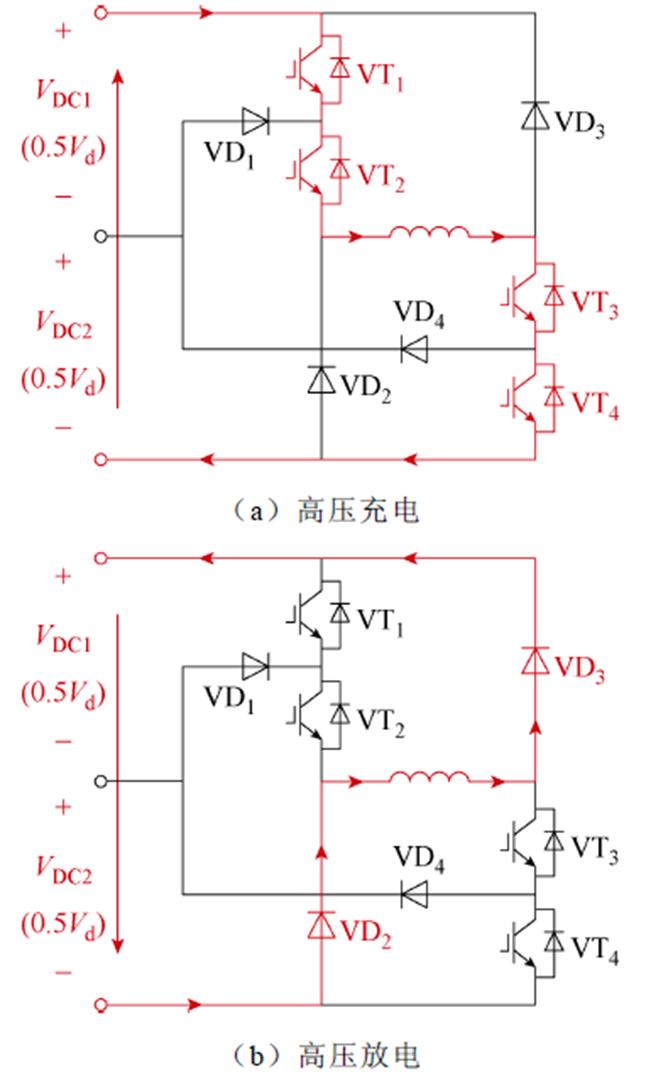
图3 高压状态下运行过程
Fig.3 Operation process under high voltage state
当磁轴承线圈中的电流需要跟踪快速增加的指令电流时,功率放大器电路工作在高压充电状态。在这种情况下,VT1~VT4均导通,线圈通过4个开关管连接到高压直流电源(VDC1与VDC2串联);在VDC1和VDC2的共同作用下,线圈电流迅速上升,其表达式为
 (5)
(5)
相反,当线圈中的电流需跟踪指令迅速减小时,电路工作在高压放电状态。此时,VT1~VT4均关断,线圈通过VD2和VD3反向连接到高压直流电源,线圈电流在输入电压-Vd的作用下迅速减小,其表达式为
 (6)
(6)
由式(5)和式(6)计算可知,若忽略线圈内阻及功率管导通压降对电流变化的影响,五电平开关功率放大器在高压运行状态下的最大电流变化率与式(4)相同,即五电平开关功率放大器在高压运行状态下的最大电流变化率与传统三电平开关功率放大器的电流变化率完全相同。由此可得,在相同的母线电压条件下,当参考电流快速变化时,五电平开关功率放大器电路具有与传统开关功率放大器相同的动态响应能力。
五电平开关功率放大器的控制策略旨在实现高低压运行状态的自动切换。五电平开关功率放大器的控制框图如图4所示。图中,iref为参考电流信号,io为电流传感器输出信号,ie为误差信号,uc为总调制信号,uj(j=1~4)为与各桥臂对应的分调制信号,PWMj(j=1~4)为与各桥臂对应的开关信号,u+、u-为负载线圈两端节点电压。
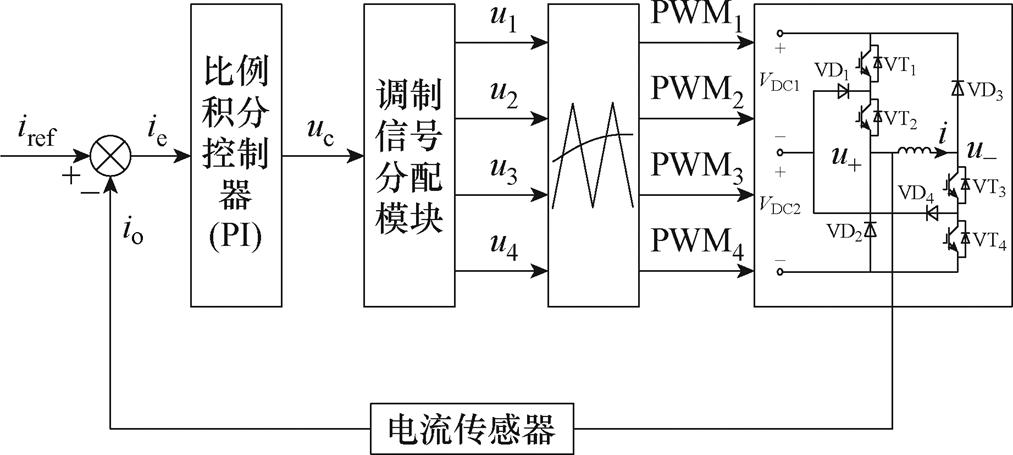
图4 控制器结构示意图
Fig.4 Structure of controller
根据1.1节中的拓扑分析,五电平开关功率放大器电路在运行过程中有五种工作状态:高(低)压充电、高(低)压放电和续流。通过改变各桥臂的占空比,可改变每个工作状态的运行时间,从而控制输出电流的变化。
五电平开关功率放大器采用基于脉宽调制的闭环电流控制方式,其工作原理是首先将参考电流信号iref与反馈电流信号io作差所得的跟踪误差信号ie通过比例积分控制器,输出总调制信号uc,再由调制信号分配模块将总调制信号uc转换成各桥臂相应的调制信号uj(j=1~4),最后再通过三角载波信号进行调制,得到各开关管的开关控制信号。在调制信号分配模块中,各桥臂调制信号uj(j=1~4)与总调制信号uc之间的关系为
 (7)
(7)
式中,ucÎ[-u0, u0];u1、u2、u3及u4Î[0, 1];u0为桥臂1和桥臂3的控制电压偏置信号,为确保功率放大器电路在低压状态运行时VT1始终断开、VT3始终导通,并且电路在所有运行状态下都满足动态响应要求,需取u0Î[2, 3]。若u0=2.5,当uc分别为±0.5、±0.75和±1时的调制波形如图5所示。图中,utri为三角载波,T为三角载波周期即开关周期,u为负载线圈的电压。
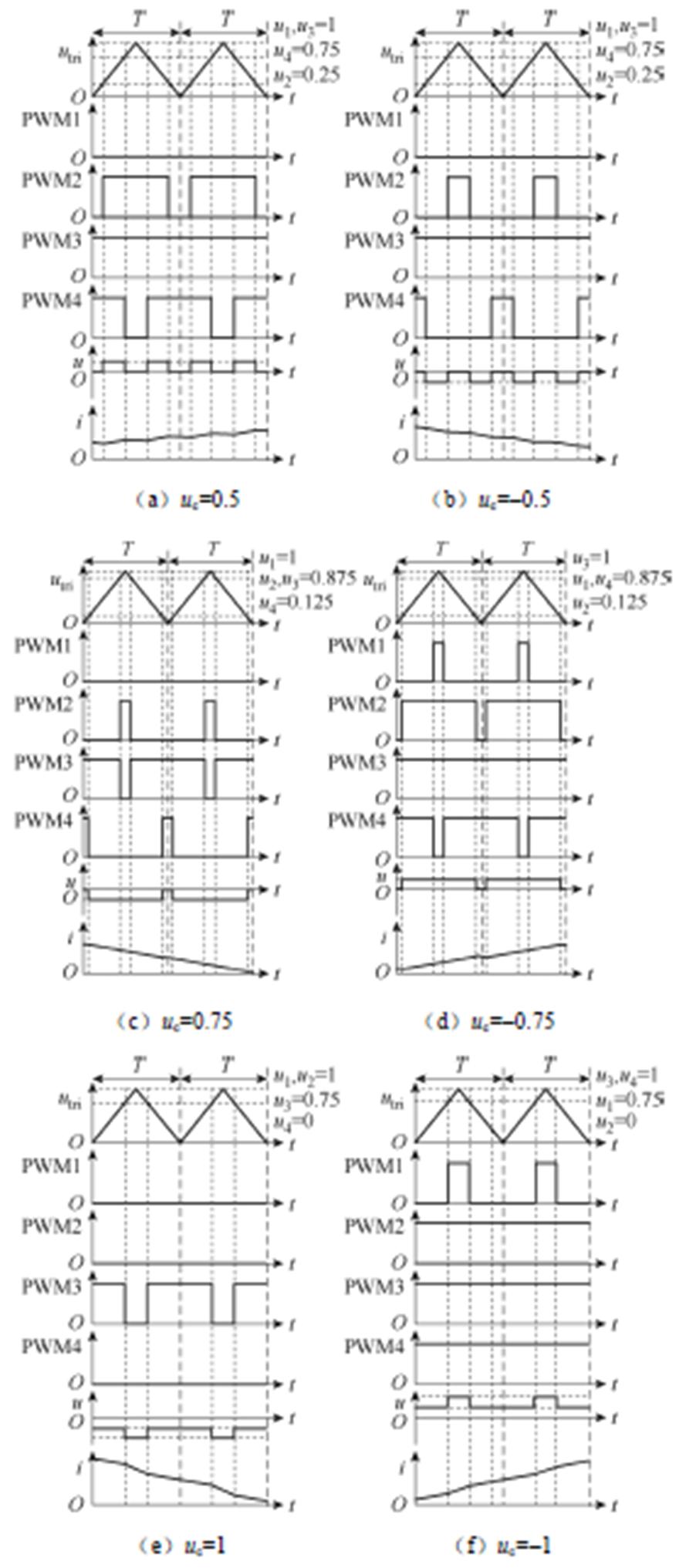
图5 五电平开关功率放大器调制波形
Fig.5 Modulation waveforms of five level switch power amplifier
结合式(8)及脉宽调制规则可知:"u0Î[2, 3],当ucÎ 2-u0, u0-2
2-u0, u0-2 时,电路处于低压运行状态;当ucÎ
时,电路处于低压运行状态;当ucÎ -u0, 0.5-0.5u0
-u0, 0.5-0.5u0 0.5u0-0.5, u0时,电路处于高压状态运行;当ucÎ0.5-0.5u0, 2-u0u0-2, 0.5u0-0.5时,处于两者之间的过渡状态,在该状态下,VT1、VT3开始动作,但没有VT1~VT4同时全都导通或关断的时刻。此外,随着控制偏置电压u0取值的增大,过渡状态的运行范围随之减小,若取u0=3,电路无过渡状态,可由低压运行状态直接切换到高压运行状态。
0.5u0-0.5, u0时,电路处于高压状态运行;当ucÎ0.5-0.5u0, 2-u0u0-2, 0.5u0-0.5时,处于两者之间的过渡状态,在该状态下,VT1、VT3开始动作,但没有VT1~VT4同时全都导通或关断的时刻。此外,随着控制偏置电压u0取值的增大,过渡状态的运行范围随之减小,若取u0=3,电路无过渡状态,可由低压运行状态直接切换到高压运行状态。
开关功率放大器电路中的平均电压由每个开关管的占空比控制[16]。变量d1~d4为每个桥臂的占空比,结合式(7)及脉宽调制规则可得
 (8)
(8)
故对于线圈,根据拓扑分析,其两端的节点电压可表示为
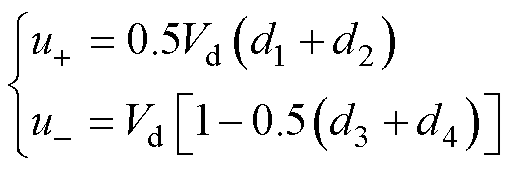 (9)
(9)
由于磁轴承线圈为感性负载,其内阻对于电流变化影响很小,因此若忽略内阻的影响,则线圈在一个开关周期内的平均电流变化率可表示为
 (10)
(10)
将上述分析中电路切换状态的误差阈值uc_th1= u0-2和uc_th2=0.5u0-0.5代入式(7)~式(10),可得电路处于运行状态切换的临界电流变化率为
 (11)
(11)
对于直流分量为I0、振幅为I、频率为f的正弦参考电流iref=I0+Isin(2pft),当其最大电流变化率分别达到式(11)中的两个临界值时,有
 (12)
(12)
可计算得到电路中分别开始出现过渡状态、高压状态时的参考电流频率fth1、fth2为
 (13)
(13)
为方便分析,对五电平开关功率放大器的运行模式进行定义:当功率电路在整个运行周期内始终维持低压状态时,定义为低压运行模式;当功率电路运行过程中出现过渡状态但未达到高压状态时,定义为过渡运行模式;当功率电路在运行中出现高压状态时,定义为高压运行模式。
由此,在五电平开关功率放大器的临界状态附近,存在若干个运行模式切换的临界电流频率。式(13)中的fth1、fth2分别为五电平开关功率放大器由低压模式向过渡模式切换、由过渡模式向高压模式切换的临界电流频率,分别表征了低压模式和过渡模式对时变电流的跟踪能力边界。
当参考电流频率低于临界电流频率fth1时,其缓慢的电流变化特性使得调制信号uc始终处于切换阈值范围内,功率电路持续工作在低压状态,对应五电平开关功率放大器处于低压模式;当参考电流频率高于临界电流频率fth2时,在周期电流变化平缓阶段,uc仍保持在阈值范围内,但在周期电流快速变化的阶段,uc将超出阈值,使功率电路切换至高压状态,故高频工况下功率电路会随电流变化率的周期性波动,在各状态间交替切换,对应五电平开关功率放大器处于高压模式。
此外,由式(13)可知,随着控制偏置电压u0取值的增大,过渡模式的运行范围随之减小,若取u0=3,无过渡模式,五电平开关功率放大器可由低压模式直接切换到高压模式。
对于AMBs,其振动控制所需的线圈电流的频率由转子转速决定,即
 (14)
(14)
式中,f1为线圈电流基频;n为转子转速。
为实现AMBs在全转速范围内的稳定悬浮与振动控制,结合上述分析,通过临界电流频率fth1、fth2可对五电平开关功率放大器在不同转速范围下的运行模式进行划分:当n<60fth1时,五电平开关功率放大器采用低压模式运行,通过降低输入电压减小功耗、电压应力与电磁干扰,同时匹配低转速工况的低动态响应需求;当n>60fth2时,五电平开关功率放大器切换至高压模式,以提升电流跟踪带宽,满足高转速工况的高动态响应需求。
需要特别指出的是,fth1、fth2作为电气临界频率,其作用在于划分五电平开关功率放大器的运行模式的应用范围,其本质区别于表征转子共振特性的机械临界转速。
为验证五电平开关功率放大器及其控制策略的可行性,根据实际实验平台在Simulink中搭建仿真模型,参数见表1,并设置参考电流为幅值是7.5 A的正弦电流。将上述参数代入式(13),得到的临界频率的计算值为fth1=167.6 Hz,fth2=293.3 Hz。
表1 五电平开关功率放大器实验台的基本参数
Tab.1 Basic parameters of the five level switching power amplifier experimental bench
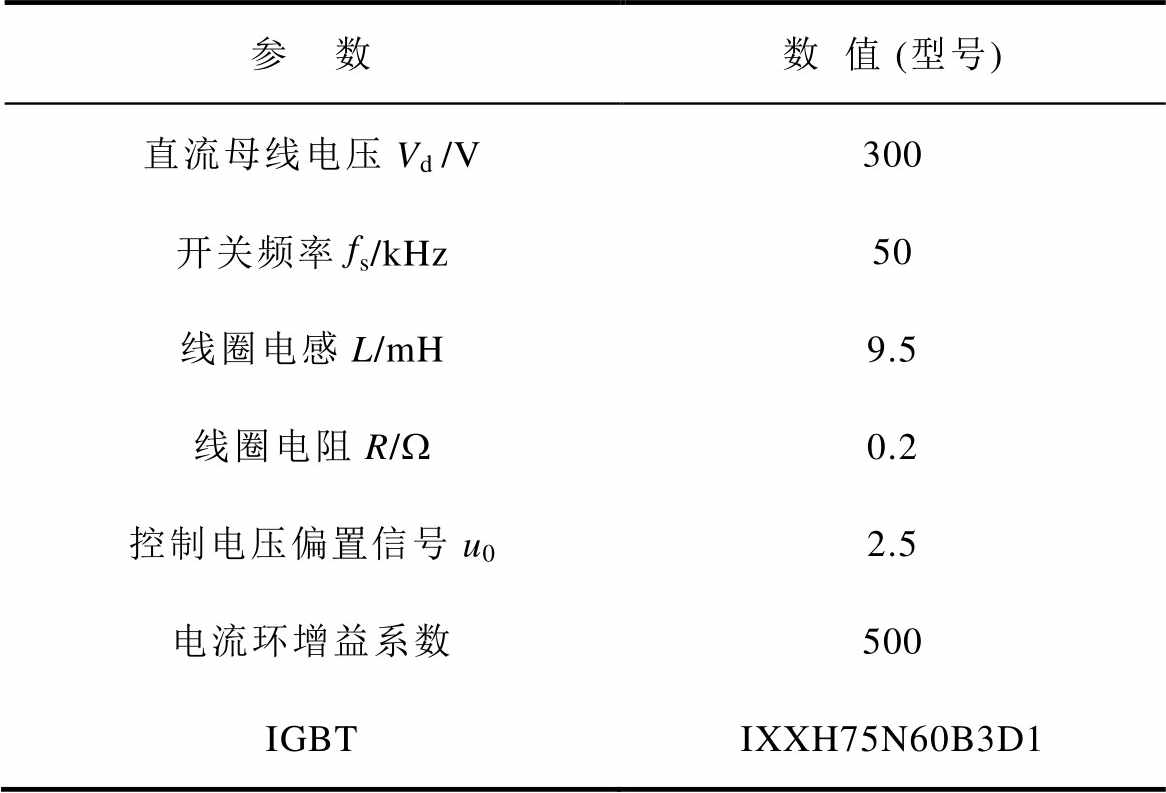
参 数数值 (型号) 直流母线电压Vd /V300 开关频率fs/kHz50 线圈电感L/mH9.5 线圈电阻R/W0.2 控制电压偏置信号u02.5 电流环增益系数500 IGBTIXXH75N60B3D1
在仿真模型中设置参考电流为振幅是7.5 A正弦波,通过改变频率观察电路运行状态变化,仿真结果如图6所示。
当参考电流频率较小时,仿真系统运行在低压模式,随着参考电流频率增加,仿真电路开始出现过渡状态。如图6a所示,图中A部分为低压状态,电路中仅VT2和VT4动作,线圈端电压呈现0 V和±150 V切换;B部分为VT1/VT2/VT4组合动作的过渡状态,在该部分中,因VT1和VT4无同时导通时段,线圈两端没有+300 V出现;同理,对于VT2/ VT3/VT4组合动作的过渡状态,无VT2和VT3同时关断时段,故线圈两端没有-300 V出现。若将VT1首次出现开关动作时的参考电流频率定义为五电平开关功率放大器进入过渡模式的临界电流频率,则有临界电流频率的模拟值为fth1=165.2 Hz。继续增大参考电流频率,仿真电路中开始出现高压运行状态。如图6b所示,图中A、C部分为低压运行状态;B、D部分分别为VT2/VT3/VT4组合动作及VT1/ VT2/VT4组合动作的过渡状态;E部分为高压运行状态,在该部分中存在VT1~VT4同时导通时段,在该时段内线圈两端电压达300 V。若将线圈两端首次出现300 V电压时的参考电流频率定义为五电平开关功率放大器进入高压模式的临界电流频率,则有临界电流频率的模拟值fth2=298.6 Hz。
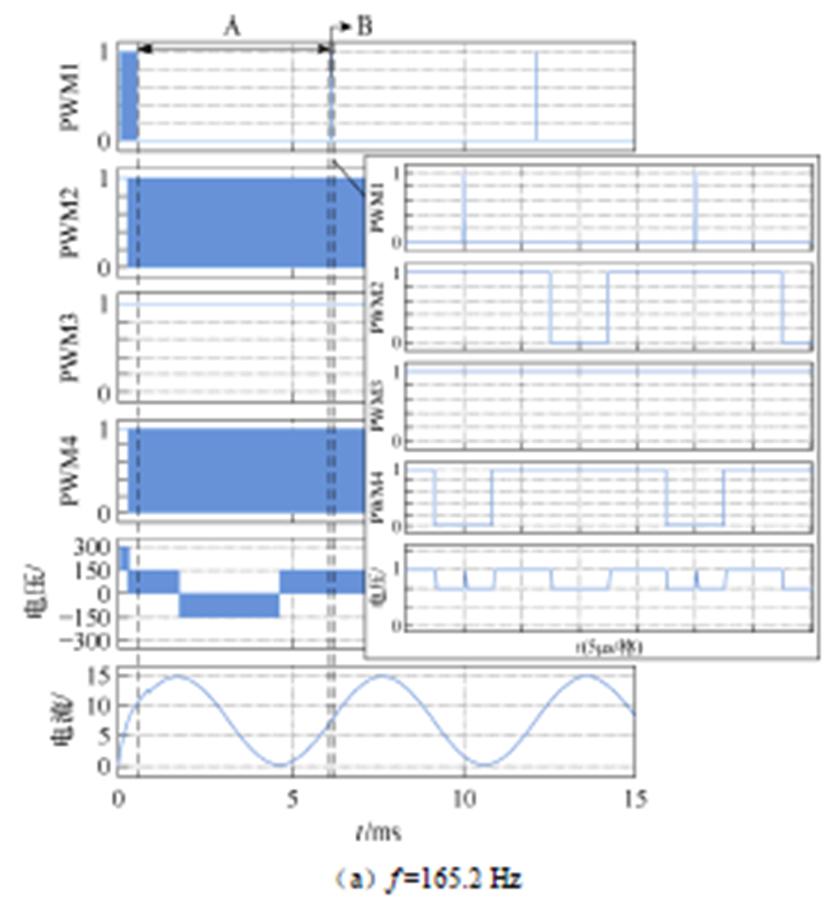
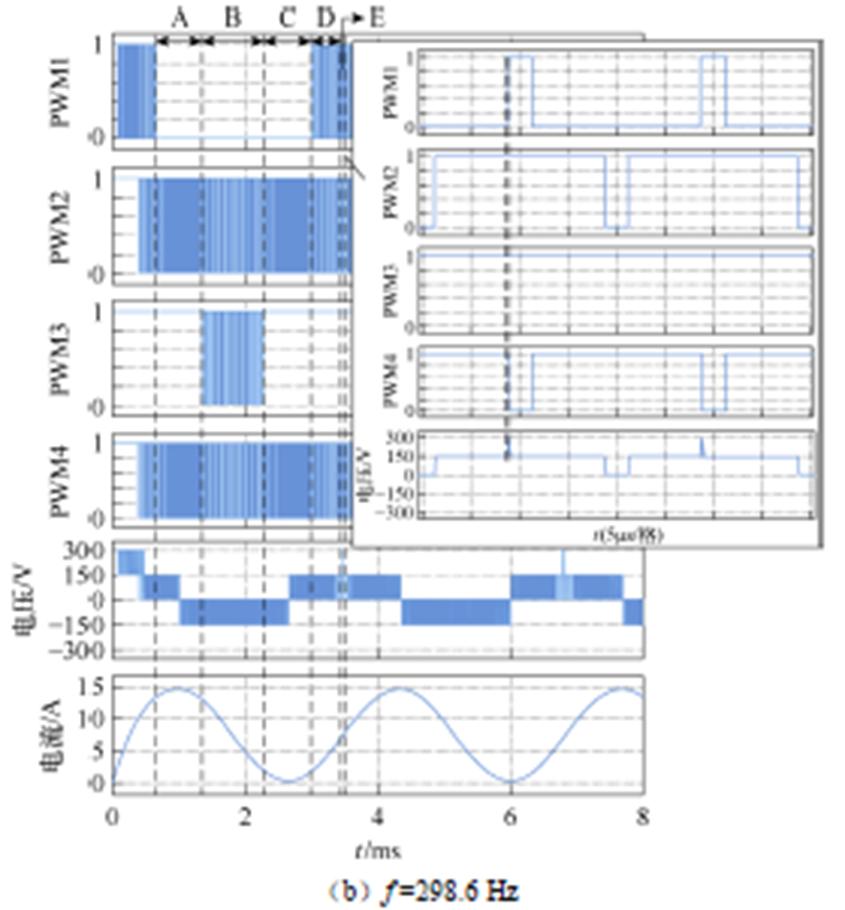
图6 五电平开关功率放大器运行仿真结果
Fig.6 Simulation results of five level switching power amplifier operation
开关功率放大器中的开关管工作在频繁开断状态,其产生的电磁干扰容易激起门级电压尖峰,击穿开关管。本节针对五电平开关功率放大器电路中单个开关管的短路故障,提出相应的故障检测方法和容错控制策略。
根据电路拓扑分析,通过控制电路中各个开关管的开断,可以控制电路中两个半桥结构的串联运行和分别独立运行,为五电平开关功率放大器的短路容错控制提供拓扑支持。根据不同开关管的短路故障,通过不同的调制规则,可形成图7所示的容错模式。
当五电平开关功率放大器的开关管VT1发生短路故障时,如图7a所示,可将VT1视作常导通状态,在这种情况下,令VT4同样处于常导通状态,VT2、VT3则根据三电平开关功率放大器的调制规则进行开关动作。此时,功率电路由VDC1和VDC2串联供电。由此构成争对开关管VT1短路情况的容错模式a。同理,若开关管VT4发生短路故障,电路切换到容错模式d,如图7d所示,其容错控制方式与容错模式a相似。
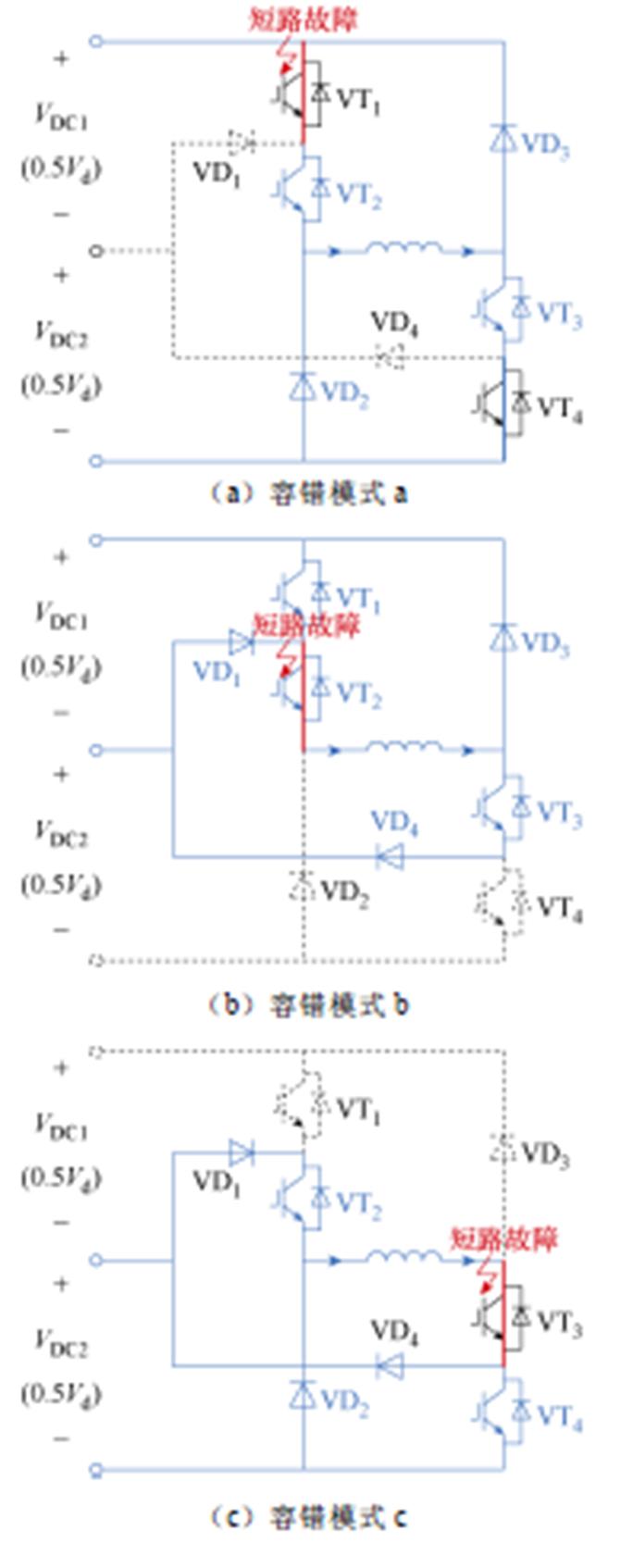
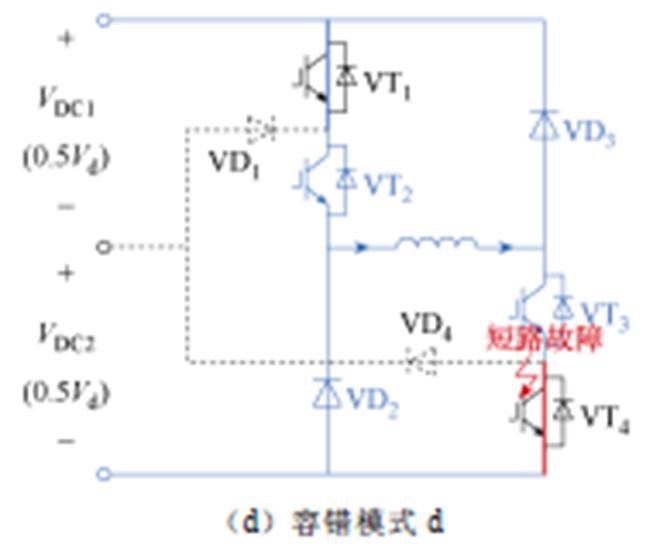
图7 短路容错拓扑
Fig.7 Short circuit fault-tolerant topology diagram
当五电平开关功率放大器的开关管VT2发生短路故障时,如图7b所示,可将VT2视作常导通状态,则令VT4处于常断开状态,VT1、VT3根据三电平开关功率放大器的调制规则进行开关动作,在此条件下,功率电路由VDC1单独供电,构成争对开关管VT2短路情况的容错模式b。同理,如图7c所示,开关管VT3发生短路故障时的容错模式c与容错模式b相似,在该容错模式下,功率电路将由VDC2单独供电。
由此,当五电平开关功率放大器电路发生开关管短路故障时,电路可切换至容错模式转为三电平运行,开关管承受的电压为母线电压,电路以牺牲五电平运行优势为代价,维持AMBs功能。此外,容错设计需权衡可靠性提升与性能损失,故该容错策略适用于对可靠性要求严苛的中高压场景。
当五电平开关功率放大器的开关管发生短路故障时,其所在的桥臂中的二极管被短路,桥臂无法正常工作。在一个完整开关周期内,线圈电流将全部流过发生短路故障的开关管,不流过相应的二极管。因此,桥臂中的二极管的电流是短路故障的检测依据。
对于五电平开关功率放大器的开关桥臂2、开关桥臂3,直接连接到磁轴承线圈。不论电路处于哪种工作状态,线圈中的电流都一定流过它们,将其称为电路的内部桥臂。下面以VT2为例,对位于内部桥臂的开关管发生短路故障时进行详细说明。
根据电路拓扑分析,正常运行时电流的续流及放电状态如图8a所示,此时VT2处于关断状态,电流通过桥臂中的二极管VD2构成闭合回路。当VT2发生短路故障时,如图8b所示。由于VT2发生短路故障,开关桥臂2的中间节点un2被钳位至直流电源VDC2,即un2≥1/2Vd。因此,桥臂中的二极管VD2被短路,在整个开关周期内,电流将不再通过二极管流入节点un2,而是全部流过发生短路故障的开关管VT2。通过对比开关管发生短路故障前后电流的流通路径,可得开关管VT2、VT3发生短路故障的诊断依据为:在一个开关周期内,没有电流流过桥臂中的二极管并且开关管的占空比小于1,即
 (15)
(15)
式中,iVD2、iVD3分别为流过二极管VD2、VD3的电流。
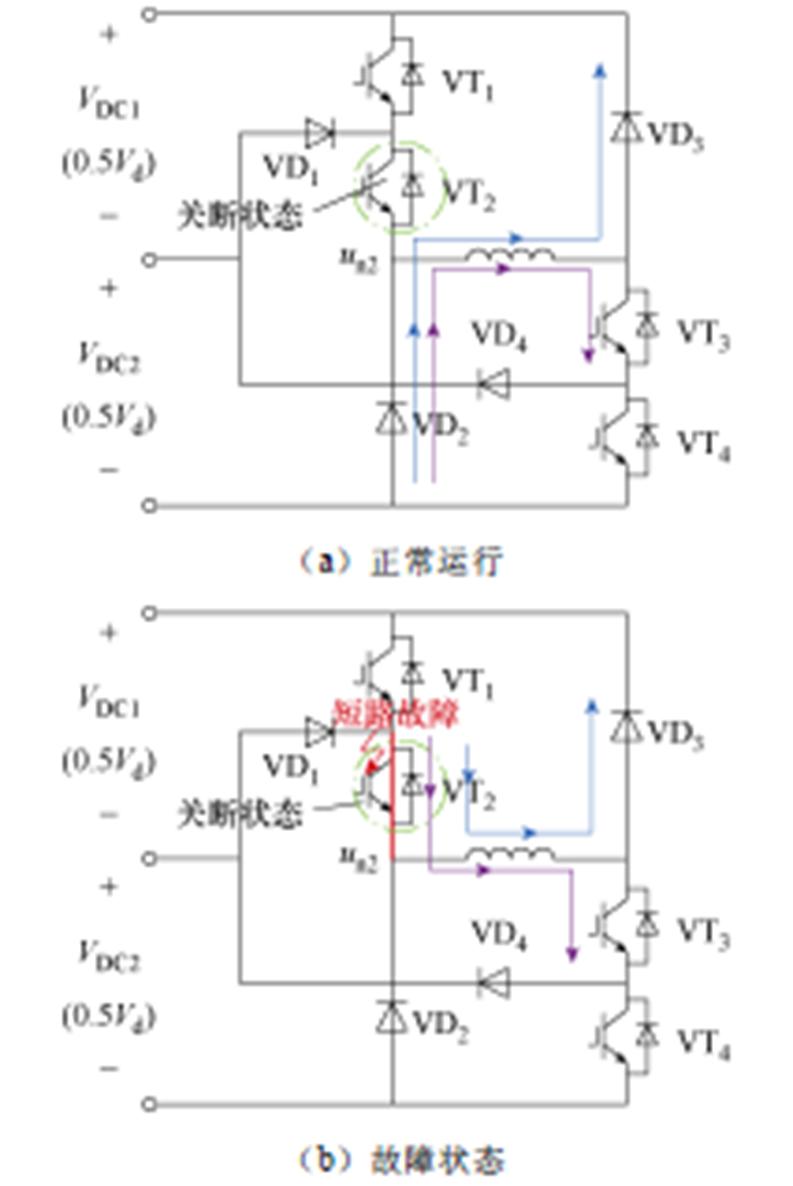
图8 短路故障发生前后绕组电流流通示意图
Fig.8 Schematic diagram of winding current flow before and after short-circuit fault occurs
对于开关桥臂1和开关桥臂4,称为功率放大器电路的外部桥臂,它们分别通过开关桥臂2和开关桥臂3中的开关管与磁轴承线圈相连。当桥臂2(桥臂3)中的开关管在一个完整开关周期内均处于关断状态时,即ucÎ[-u0, -1](uc=-u0),电流将不再流入桥臂1(桥臂4)。因此,在对外部桥臂进行短路故障诊断时,需考虑线圈电流未流入该桥臂的情况,以避免发生误判。与内部桥臂中开关管发生短路故障的分析过程类似,可得VT1、VT4的短路故障诊断依据为:在一个开关周期内,负载电流流入桥臂但不流过桥臂中的二极管并且开关管的占空比小于1,即
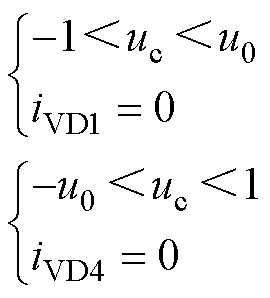 (16)
(16)
式中,iVD1、iVD4分别为流过二极管VD1、VD4的电流。
控制器通过采样电阻、隔离放大器及其ADC通道实时采集二极管电流,并验证电流信号与开关管状态逻辑关联性,实现短路故障诊断。以VT1为例,短路故障诊断流程如图9所示。每开关周期执行k次检测,在排除开关管占空比饱和及线圈电流未流入桥臂的情况下,若连续k次检测到二极管电流为0,则判定短路故障。
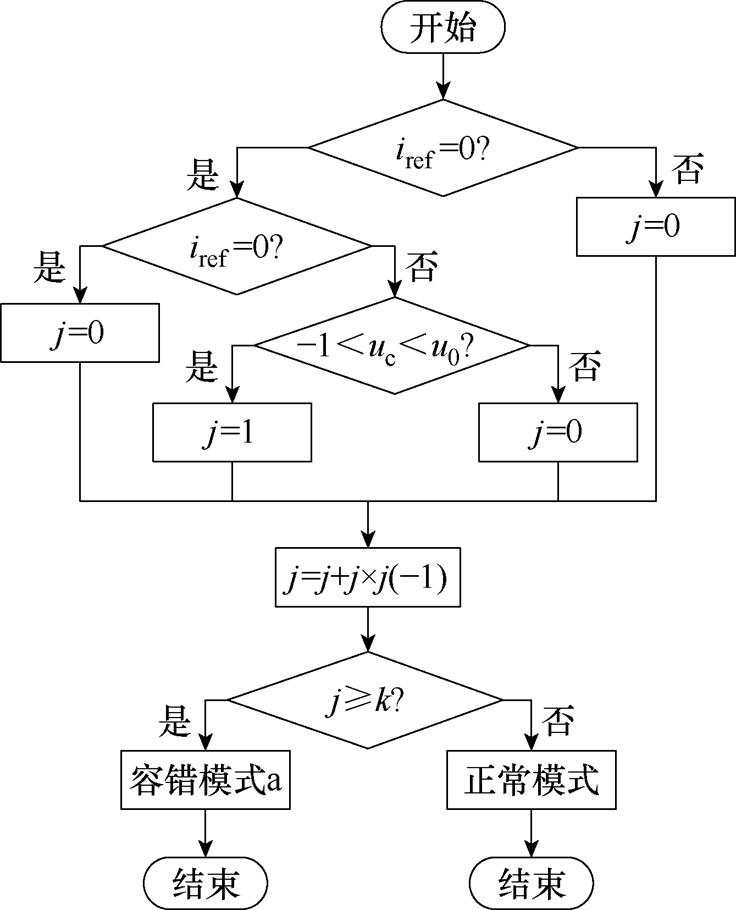
图9 短路故障诊断流程
Fig.9 Flowchart of short circuit fault diagnosis
基于2.1和2.2节中分析,得到五电平开关功率放大器的具体容错控制流程如图10所示。当电路正常运行时,控制器处于正常模式。电流检测电路实时检测每个桥臂中的二极管的电流。检测到短路故障后,根据不同开关管的短路情况,电路切换到不同的容错模式。根据图4所示的控制策略,要将电路切换到不同的容错模式,只需要改变调制信号分配模块中各桥臂调制信号与总调制信号之间的关系。因此,只需要改变控制器中相关信号处理单元,即可完成容错模式切换,该过程可在一个开关周期内完成。
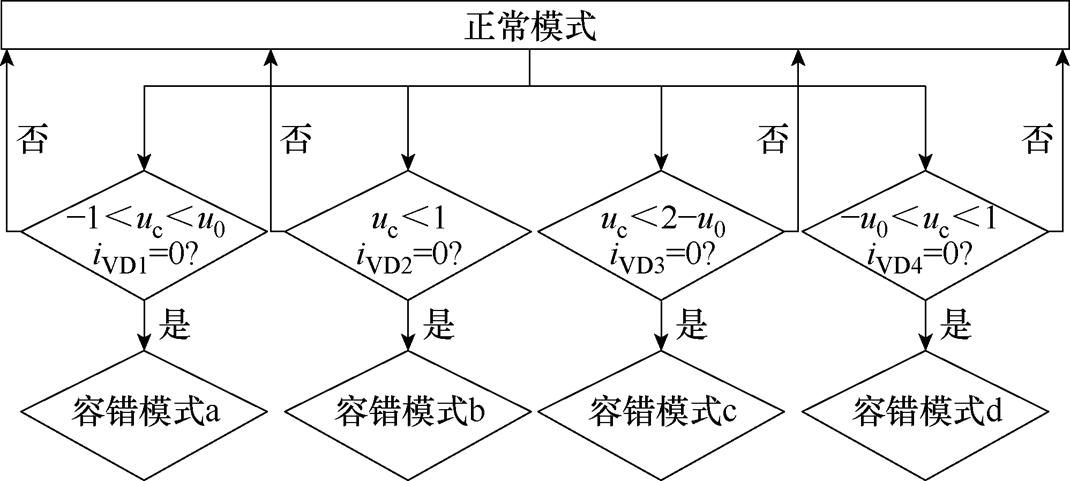
图10 容错控制流程
Fig.10 Flowchart of fault-tolerant control
为验证本文提出的五电平开关功率放大器拓扑运行的可行性、容错性和优越性,设计了图11所示的实验平台。实验平台由基于数字信号处理器(Digital Signal Processor, DSP)的控制器、具有短路容错能力的五电平开关功率放大器、负载线圈和信号发生器等构成。实验中,参考电流设置为幅值是7.5 A的正弦电流。
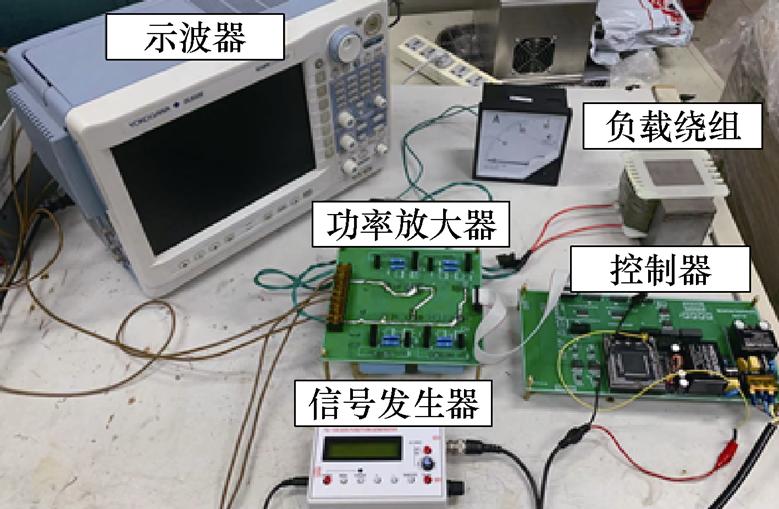
图11 五电平开关功率放大器实验平台
Fig.11 Five level switching power amplifier experimental bench
实验中,将五电平开关功率放大器的参考电流设置为一系列幅值相同、频率不同的正弦波。当参考电流频率小于157 Hz时,五电平开关功率放大器处于低压模式,如图12a所示,VT1始终处于关断状态,VT3始终处于导通状态,VT2、VT4根据调制规则进行开关动作,在0 V和±150 V的交替作用下,线圈电流跟踪参考电流变化。此时,参考电流频率较小,线圈电流的幅值和相位均可以完全跟踪参考电流变化。当参考电流频率等于157 Hz时,VT1开始动作,对应电路处于由低压状态转向过渡状态的临界,故有临界电流频率实验值fth1=157 Hz。当参考电流频率在157~302 Hz时,如图12b所示,图中,A为VT1/VT2/VT4组合动作的过渡状态;B、D为低电压状态;C为VT2/VT3/VT4组合动作的过渡状态。五电平开关功率放大器处于过渡模式,VT1~VT4均进行开关动作但不存在所有开关管同时导通或关断的时刻,负载线圈两端电压为0 V和±150 V交替出现。此时,线圈电流幅值能够基本完全跟踪参考电流变化,对应幅值衰减为0.19 dB,但其相位约有7.48°的滞后。当参考电流频率为303 Hz时,电路中开始出现所有开关管同时导通的时刻,在该时刻,线圈两端电压为300 V,电路处于由过渡状态转向高压状态的临界,故有临界电流频率实验值fth2=303 Hz。当参考频率大于303 Hz时,五电平开关功率放大器处于高压模式,如图12c所示,图中,A为高电压放电;B、H为VT2/VT3/VT4组合动作的过渡状态;C、G为低电压状态;D、F为VT1/VT2/VT4组合动作的过渡状态;E为高电压充电状态。VT1~VT4根据各自的调制规则执行开关动作,电压0 V、±150 V和±300 V在负载线圈两端交替作用,以满足系统对动态响应的需求。此时,参考电流频率较大,线圈电流幅值能够基本跟踪参考电流变化,幅值衰减为0.28 dB,相位滞后增大至13.2°。实验结果表明,五电平开关功率放大器能可靠跟踪500 Hz以下的动态电流指令,满足大多数AMBs系统的应用需求。
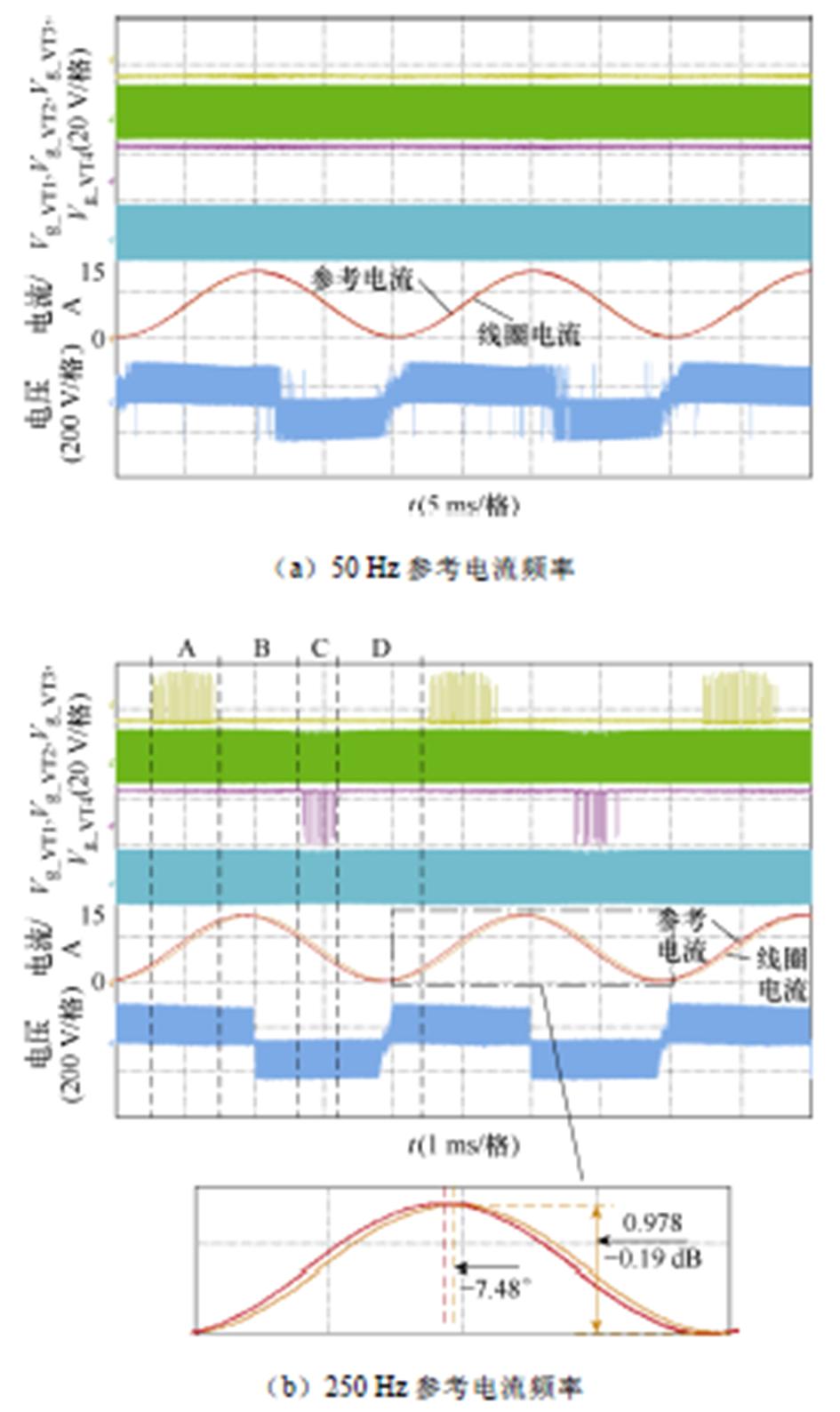
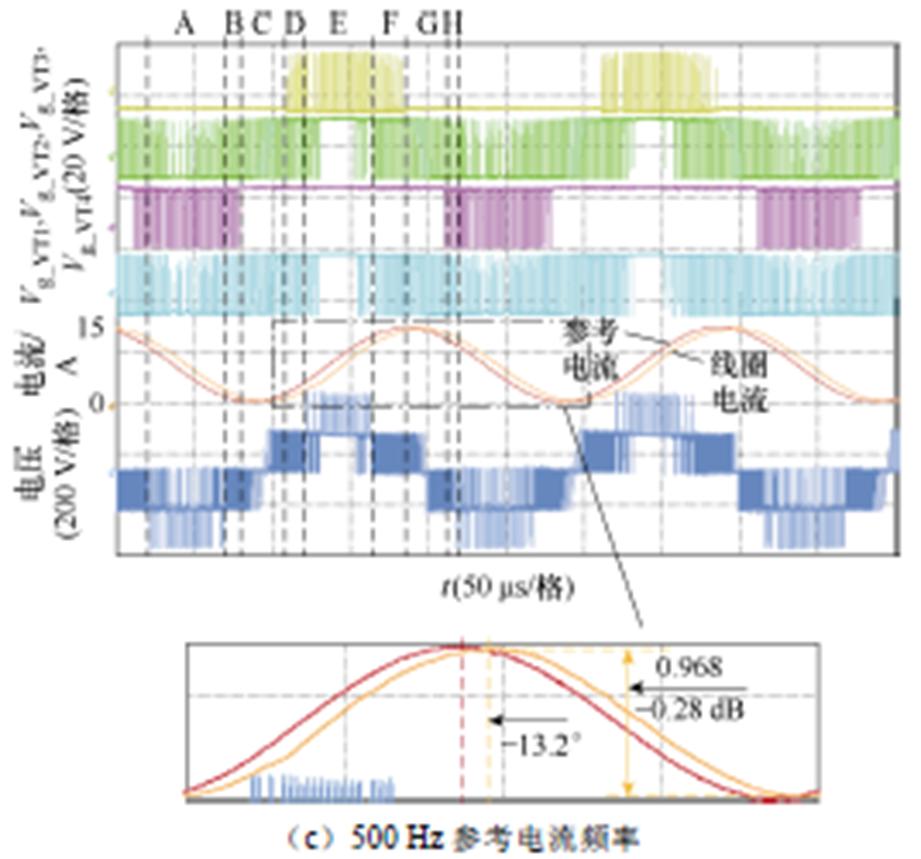
图12 开关功率放大器五电平模式运行实验
Fig.12 Operation experiment of switch power amplifier in five level mode
由此,五电平功率放大器在不同参考电流频率下按照控制策略中的预设状态运行,证明了功率放大器五电平运行的可行性。此外,对于临界电流频率fth1及fth2,其理论值、仿真值和实验值相近,对比见表2,证明了式(14)的有效性。
表2 临界电流频率对比
Tab.2 Comparison of cut-off frequencies (单位: Hz)
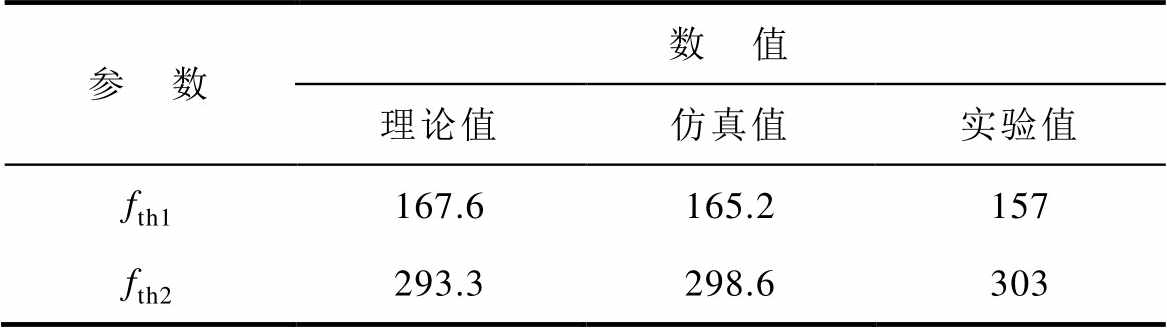
参 数数 值 理论值仿真值实验值 fth1167.6165.2157 fth2293.3298.6303
对母线电压均为300 V的五电平功率放大器和传统三电平功率放大器进行扫频测试,得到的幅频和相频响应曲线如图13所示。测试结果表明,对于振幅为7.5 A、频率为0~3 000 Hz的给定正弦参考电流,五电平功率放大器和传统三电平功率放大器具有基本相同的频率响应,特别是五电平功率放大器处于低压模式时,其动态性能没有受到影响。
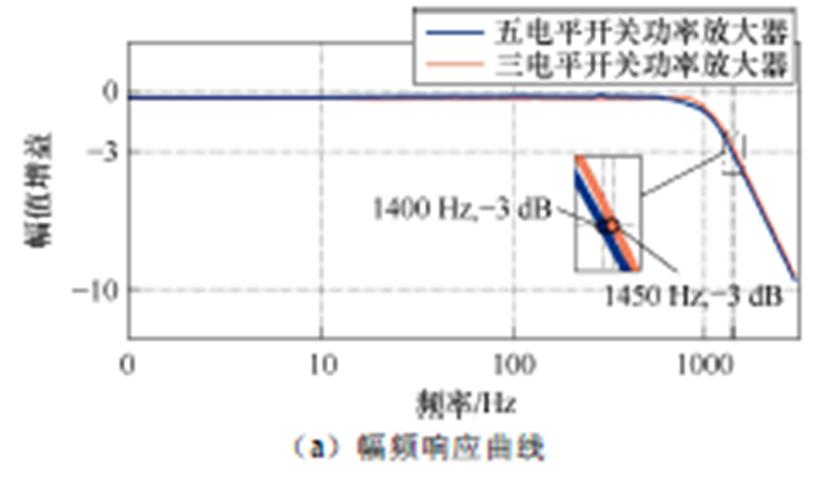
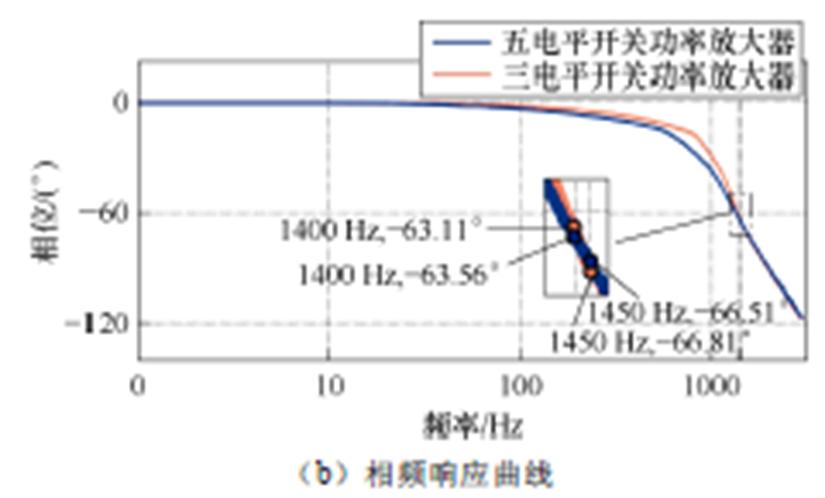
图13 扫频测试结果
Fig.13 Sweep frequency test results
开关功率放大器阶跃响应实验结果如图14所示。当参考电流为幅值15 A的阶跃信号时,三电平开关功率放大器和五电平开关功率放大器的电流响应时间分别为385 ms和413 ms、稳态误差分别为0.1 A(0.67%)和0.12 A(0.8%)、电流纹波分别为0.26 A(1.7%)和0.18 A(1.2%),二者电流响应速度、稳态误差及电流纹波大小基本相同。在电流跳变过程中,三电平开关功率放大器的输出电流出现超调现象,超调量为5.8%,而五电平开关功率放大器因其高低压切换的运行模式,输出电流未出现明显超调现象,提高了输出电流质量。
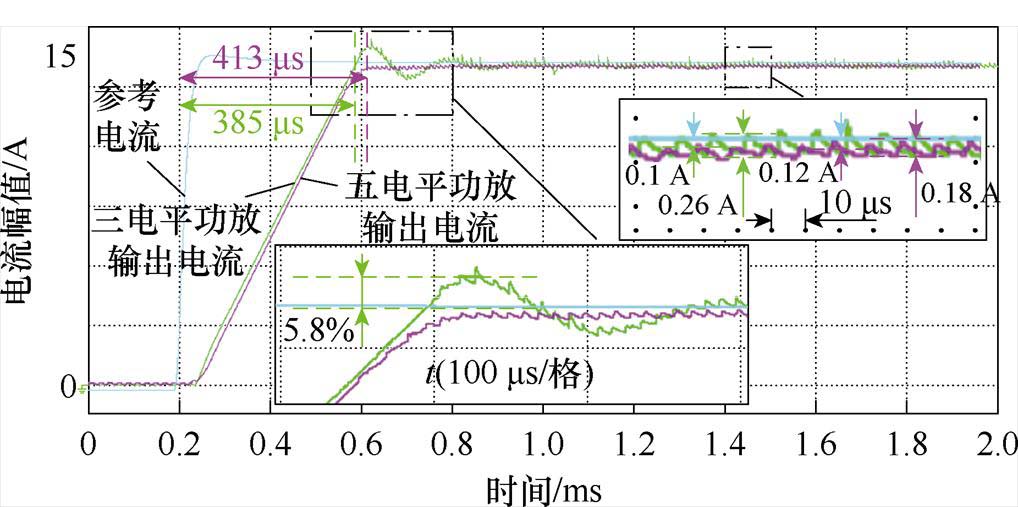
图14 阶跃响应实验
Fig.14 Step response experiment
500 Hz参考电流下开关管波形的对比如图15所示,在500 Hz参考电流工况下,五电平结构的开关管的门极驱动和源漏极电压波形的中的振荡尖峰均低于三电平结构。实验结果表明,五电平拓扑能有效降低开关管承受的电磁干扰,由此提升器件工作的稳定性并降低故障风险。
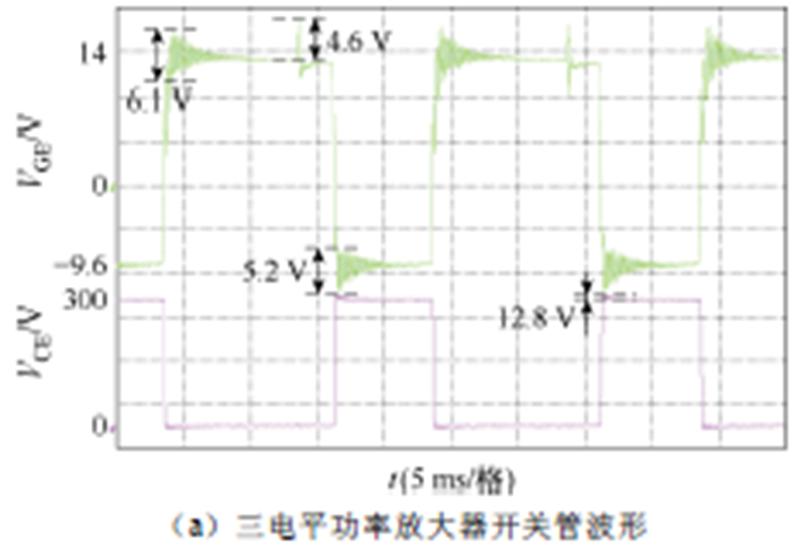
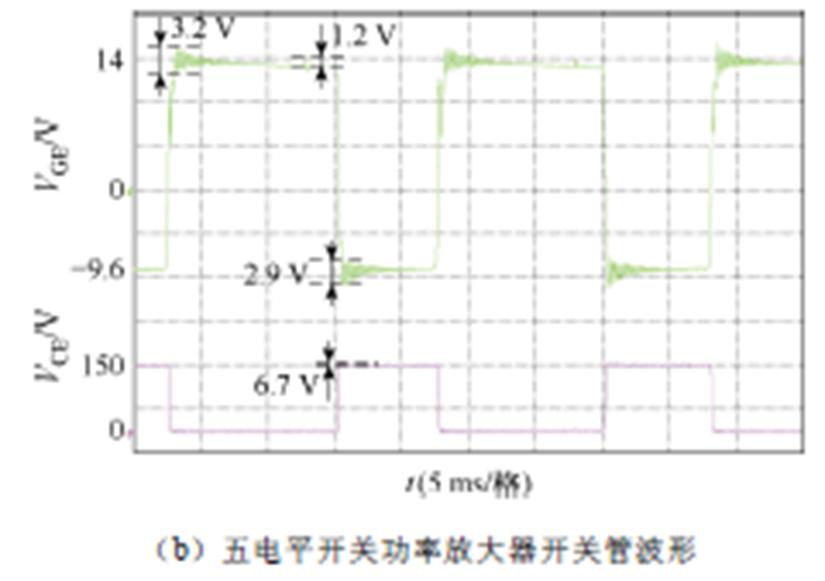
图15 500 Hz参考电流下开关管波形的对比
Fig.15 Comparison of switching tube waveforms at 500 Hz reference current
此外,为验证五电平功率放大器在低动态响应需求下运行的优越性,将参考电流分别设置为一系列幅值不同的恒流信号以及频率分别为50 Hz和500 Hz正弦信号,测试传统三电平功率放大器和五电平功率放大器在不同母线电压和开关频率下的运行功耗及效率,结果如图16所示。
当参考电流为恒流信号和50 Hz正弦信号时,五电平功率放大器电路运行在低压模式,三电平功率放大器和五电平功率放大器电路的功耗差值及效率提升随电路母线电压和开关频率的增加而增大。当给定参考电流为500 Hz正弦信号时,五电平电路运行在高压模式,与三电平电路运行功耗及运行效率相近。此外,在图16a和图16b中,功耗差值随输出电流幅值的增大呈现先增后减的趋势。这是因为五电平功率放大器在低压状态运行时具有额外的通态损耗,会抵消一部分降低输入电压所带来的功耗减小效果。
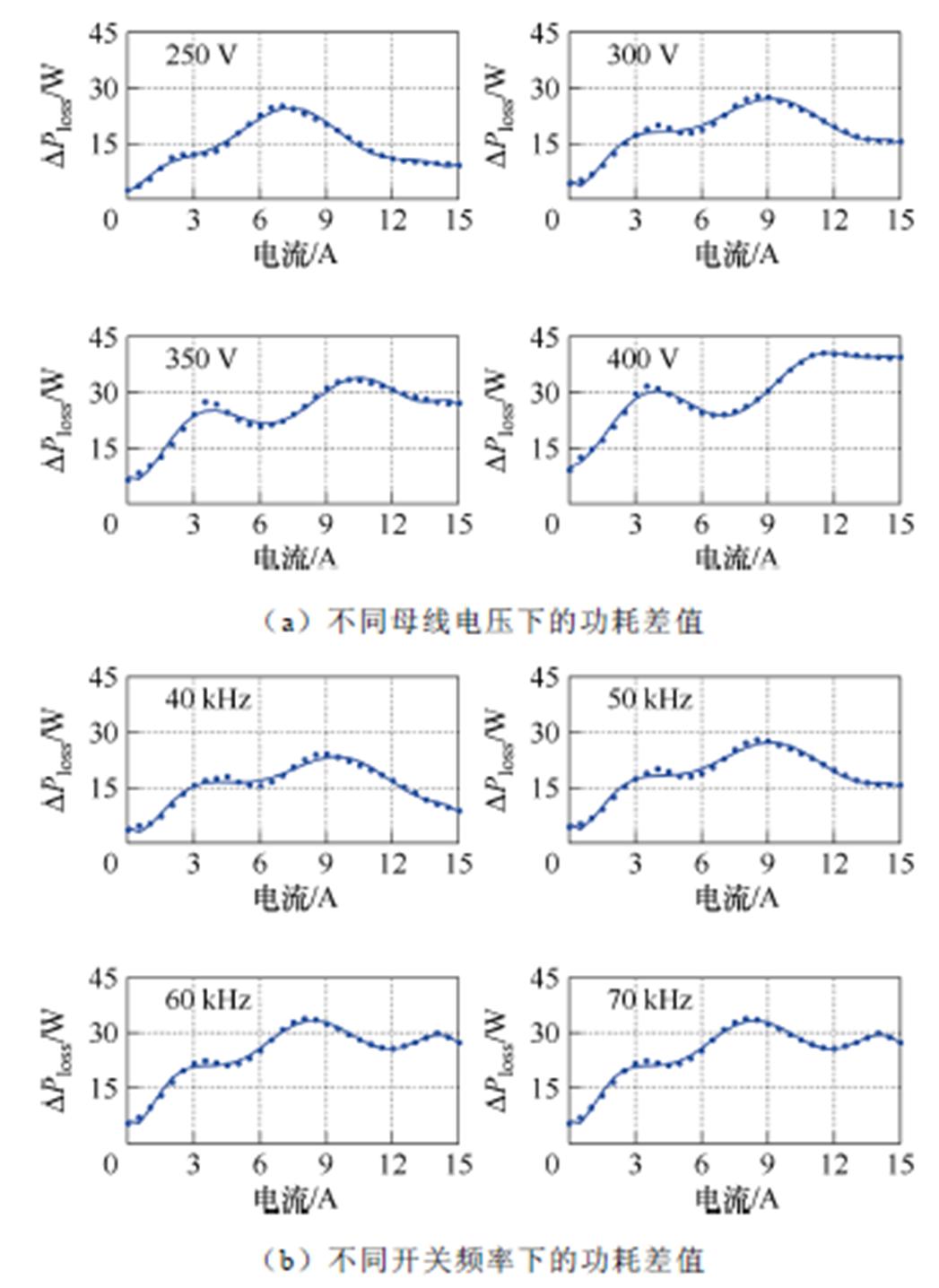
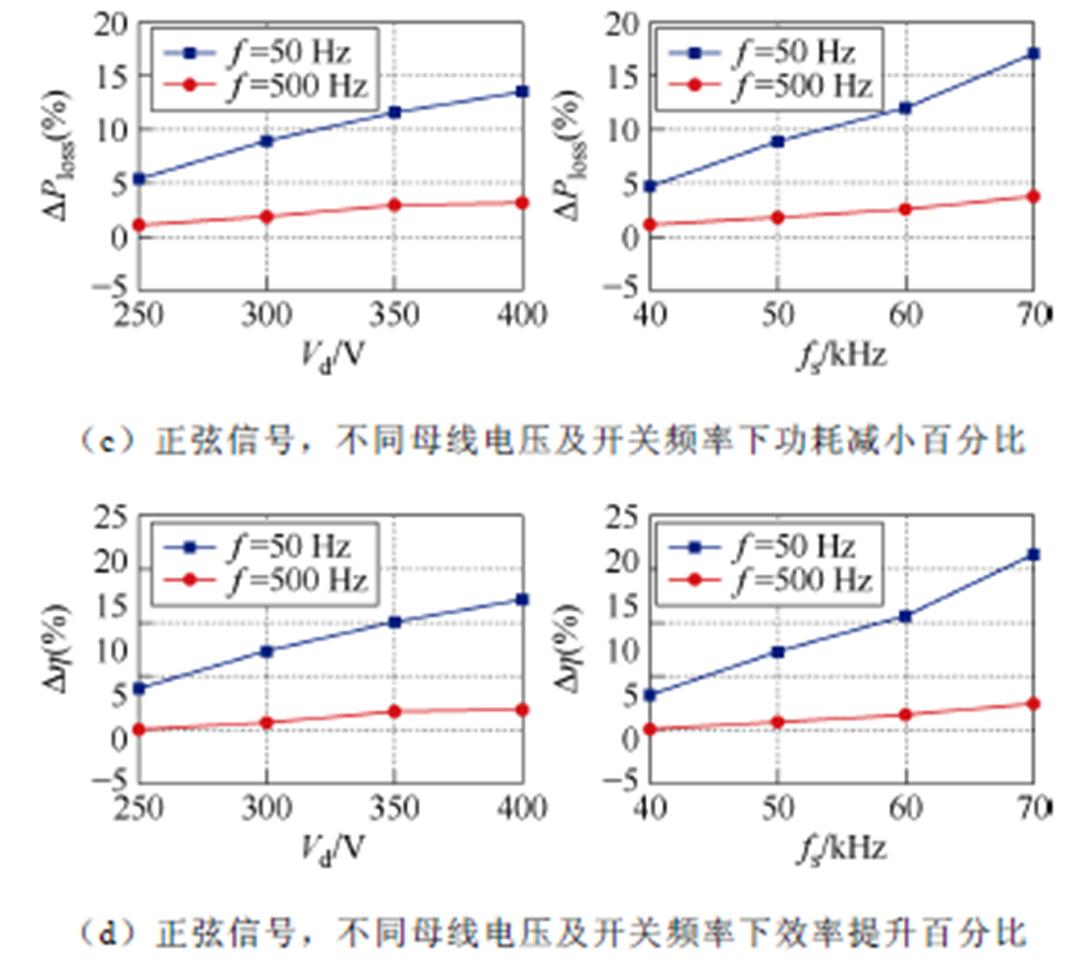
图16 五电平与三电平功率放大器功耗及效率对比
Fig.16 Comparison of power consumption and efficiency between five-level power amplifiers and three-level power amplifiers
因此,在一定范围内,五电平功率放大器比传统功率放大器运行更具优势,并且随着功率放大器电路母线电压和开关频率增大,五电平功率放大器运行优势愈加明显。
需特别指出的是,对于文本所聚焦的中高压宽频AMBs,通常采用具有高耐压、高抗浪涌特性的IGBT作为功率放大器电路的开关器件[23-24]。在实验中,采用型号为IXXH75N60B3D1的IGBT,本结论适用于母线电压Vd≥300 V的中高压驱动场合。
3.2.1 模拟短路容错实验
在文献[19-20]中,一般采用将开关管驱动信号置1的方式来模拟其发生短路故障时的情况。实验中,将参考电流设置为频率为500 Hz的正弦信号,此时电路工作在高压模式。下面以VT1为例,验证在电路外部桥臂中的开关管发生短路故障时功率放大器的容错性。
在10 ms时刻对开关管VT1的驱动信号(PWM1)置1,模拟其发生短路故障,实验结果如图17所示。可以看出,当开关管VT1发生短路故障后,与其对应的二极管中的电流发生变化,控制器检测到短路故障后输出故障信号并切换到相应的容错模式a。上述过程耗时70 ms,远小于给定参考电流的周期,因此,电路开关管的短路故障并未对负载电流产生明显影响。
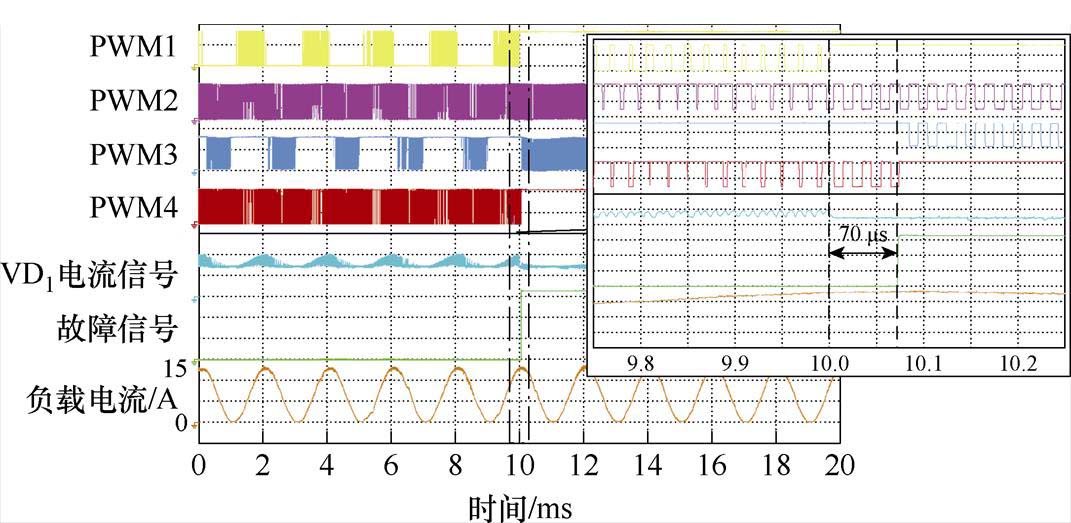
图17 模拟短路故障实验
Fig.17 Simulated short-circuit fault experiment
3.2.2 实际短路容错实验
为更接近功率放大器电路运行时开关管发生短路故障的真实状态,将五电平功率放大器电路中开关管的集电极和发射极通过按键开关与导线连接。当按键开关闭合,开关管的集电极和发射极被导线短接,即开关管被短路。对电路内部桥臂中的开关管VT2进行实验,结果如图18所示。
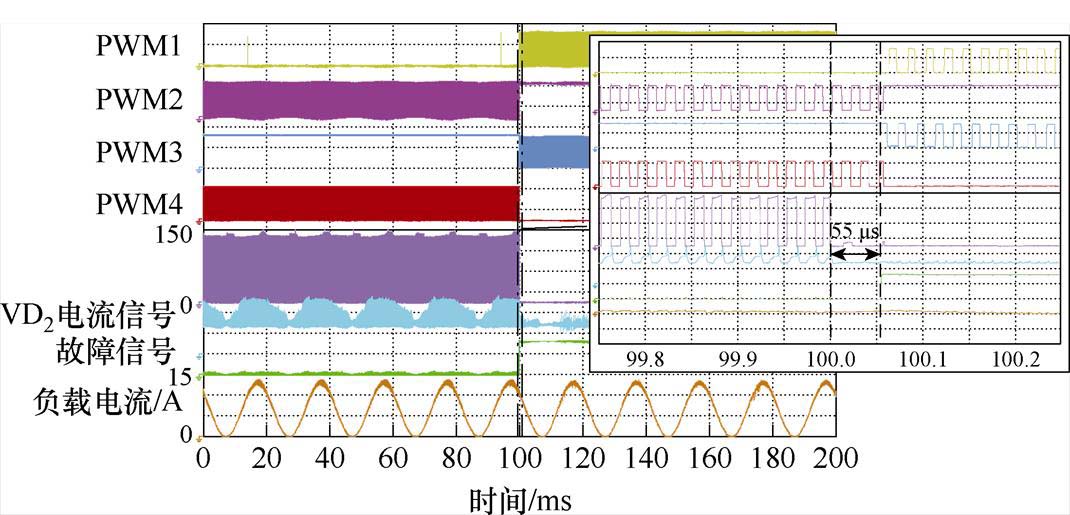
图18 实际短路故障实验
Fig.18 Actual short-circuit fault experiment
在图18中,给定参考电流为50 Hz的正弦波,此时五电平功率放大器电路工作在低压模式。在100 ms时刻闭合开关管VT2的开关按键,使被测开关管处于短路状态,其所承受电压VCE_VT2被置零。此后,故障桥臂中的电流全都流过故障开关管,对应二极管中的电流降为0。由此,控制器检测到开关管发生短路故障,立刻输出故障信号并切换到相应的容错模式b。上述容错过程耗时55 ms,远小于给定参考电流的周期,因此,负载电流未因开关管的短路故障发生明显变化。
本文提出一种具有短路容错能力的五电平开关功率放大器拓扑结构。通过对五电平功率放大器的运行原理、控制策略、短路故障检测及其容错机制的分析和在五电平开关功率放大器实验台上的实验可得到如下结论:
1)本文所提出的开关功率放大器可以五电平模式运行,与母线电压相同的三电平功率放大器具有基本一致的动态响应能力。当跟踪误差较小时,五电平功率放大器输入电压为三电平功率放大器的一半,减小了电路的运行压力,开关管承受的电压应力、电磁干扰和损耗更小。
2)控制器通过桥臂中的二极管中流过的电流对相应的开关管进行短路故障检测。一旦检测到发生短路故障,立刻切换到相应的容错模式。短路检测和容错控制可在80 ms内完成。
参考文献
[1] 李翁衡, 祝长生. 主动电磁轴承-柔性转子系统振动位移的高精度跟踪和估计方法[J]. 电工技术学报, 2023, 38(12): 3151-3164.
Li Wengheng, Zhu Changsheng. High precision tracking and estimation method for vibration dis- placement of active magnetic bearings-flexible rotor system[J]. Transactions of China Electrotechnical Society, 2023, 38(12): 3151-3164.
[2] 戈宝军, 杨子豪, 陶大军, 等. 计及磁路分布特性的电磁轴承解析模型建立与支撑性能影响因素研究[J]. 电工技术学报, 2023, 38(8): 2025-2035, 2085.
Ge Baojun, Yang Zihao, Tao Dajun, et al. Establish- ment of analytical model of active magnetic bearing considering magnetic circuit distribution characteri- stics and study on influencing factors of support performance[J]. Transactions of China Electrotech- nical Society, 2023, 38(8): 2025-2035, 2085.
[3] 李诗文, 邓智泉, 曹鑫, 等. 一种改进的磁悬浮轴承开关功率放大器数字单周期控制[J]. 电工技术学报, 2020, 35(2): 274-283.
Li Shiwen, Deng Zhiquan, Cao Xin, et al. An improved digital one-cycle control algorithm for switching power amplifier in magnetic bearings[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 274-283.
[4] Kamath K P, Vijay G S, Bekinal S I, et al. Power amplifiers and their feedback mechanisms for AMB: a comprehensive review[J]. IEEE Access, 2023, 11: 132893-132915.
[5] 周小康, 马奎, 梁蓓. IGBT模块失效机理和主动热控制综述[J]. 电子技术应用, 2020, 46(2): 18-23.
Zhou Xiaokang, Ma Kui, Liang Bei. Summary of IGBT module failure mechanism and active thermal control[J]. Application of Electronic Technique, 2020, 46(2): 18-23.
[6] 李志刚, 梅霜, 王少杰, 等. IGBT模块开关损耗计算方法综述[J]. 电子技术应用, 2016, 42(1): 10-14, 18.
Li Zhigang, Mei Shuang, Wang Shaojie, et al. The review of IGBT module switching loss calculation method[J]. Application of Electronic Technique, 2016, 42(1): 10-14, 18.
[7] Hu Anliang, Biela J. Fast and accurate data sheet based analytical switching loss model for a SiC MOSFET and Schottky diode half-bridge[J]. IEEE Open Journal of Power Electronics, 2024, 5: 1684- 1696.
[8] Geramirad H, Morel F, Dworakowski P, et al. Conducted EMI reduction in a 100kW 1.2kV dual active bridge converter[C]//PCIM Europe Digital Days 2020; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Germany, 2020: 1-8.
[9] Geramirad H, Morel F, Dworakowski P, et al. Experimental EMI study of a 3-phase 100kW 1200V dual active bridge converter using SiC MOSFETs[C]// 2020 22nd European Conference on Power Elec- tronics and Applications (EPE'20 ECCE Europe), Lyon, France, 2020: 1-10.
[10] Kumar S, Voruganti S K, Akin B, et al. Common- mode current analysis and cancellation technique for dual active bridge converter based DC system[J]. IEEE Transactions on Industry Applications, 2022, 58(4): 4955-4966.
[11] Zhao Shuang, Zhang Man, Zhang Zheng, et al. Analytic model of the voltage oscillation in a high- power converter with silicon carbide devices[J]. IEEE Transactions on Industry Applications, 2024, 60(2): 3345-3358.
[12] Li Jiawen, Yang Xin, Xu Mengwei, et al. Investi- gation on optimal switching oscillation suppression for SiC MOSFET by inductively coupled damping[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2023, 11(1): 667-678.
[13] 任鹏, 涂春鸣, 侯玉超, 等. 基于Si和SiC器件的混合型级联多电平变换器及其调控优化方法[J]. 电工技术学报, 2023, 38(18): 5017-5028.
Ren Peng, Tu Chunming, Hou Yuchao, et al. Research on a hybrid cascaded multilevel converter based on Si and SiC device and its control optimization method[J]. Transactions of China Electrotechnical Society, 2023, 38(18): 5017-5028.
[14] 向超群, 杜京润, Zhang Xinan, 等. 电容电压平衡的四电平有源中性点钳位逆变器的改进模型预测电流控制[J]. 电工技术学报, 2024, 39(18): 5826- 5838.
Xiang Chaoqun, Du Jingrun, Zhang Xinan, et al. An improved model predictive control of four-level active neutral point clamped inverter with balanced capacitor voltage[J]. Transactions of China Electro- technical Society, 2024, 39(18): 5826-5838.
[15] 叶满园, 喻生铭, 刘文芳, 等. 不对称级联九电平逆变器线性功率均衡控制策略[J]. 电工技术学报, 2024, 39(14): 4495-4507.
Ye Manyuan, Yu Shengming, Liu Wenfang, et al. Linear power balance strategy for asymmetric cascaded H-bridge nine-level inverter[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(14): 4495-4507.
[16] Yang Jichang, Jiang Dong, Sun Hongbo, et al. A series-winding topology converter with capability of fault-tolerant operation for active magnetic bearing drive[J]. IEEE Transactions on Industrial Electronics, 2022, 69(7): 6678-6687.
[17] Ding Jianfu, Sun Hongbo, Jiang Dong, et al. Open- circuit fault-tolerant control and topology switching strategy of active magnetic bearing power electronics controller[J]. IEEE Transactions on Power Electronics, 2022, 37(9): 10928-10938.
[18] Jiang Dong, Ding Jianfu, Hu Feng, et al. Open-circuit fault-tolerant control strategy of five-leg drive in active magnetic bearing[J]. IEEE Transactions on Industry Applications, 2023, 59(6): 7545-7554.
[19] 刘程子, 奚志胜, 杨艳, 等. 一种应用于磁悬浮轴承的具有容错功能的多桥臂开关功放电路[J]. 中国电机工程学报, 2023, 43(17): 6828-6840.
Liu Chengzi, Xi Zhisheng, Yang Yan, et al. Utility model relates to a fault-tolerant multi-leg switch power amplifier circuit applied to magnetic bearing[J]. Proceedings of the CSEE, 2023, 43(17): 6828-6840.
[20] Shuai Yixuan, Jiang Dong, Hu Feng, et al. General switch short-circuit fault-tolerant strategy of active magnetic bearing power electronics drive[J]. IEEE Transactions on Power Electronics, 2023, 38(11): 14504-14515.
[21] 刘程子, 贾丽焱, 杨艳, 等. 一种具有容错功能的多桥臂开关功放电路[J]. 中国电机工程学报, 2024, 44(20): 8279-8292.
Liu Chengzi, Jia Liyan, Yang Yan, et al. A multi-leg switch power amplifier circuit with fault-tolerance function[J]. Proceedings of the CSEE, 2024, 44(20): 8279-8292.
[22] 张德魁, 赵雷, 赵鸿宾. 电流响应速度及力响应速度对磁轴承系统性能的影响[J]. 清华大学学报(自然科学版), 2001, 41(6): 23-26.
Zhang Dekui, Zhao Lei, Zhao Hongbin. Effect of current response rate and force response rate on performance of magnetic bearing systems[J]. Journal of Tsinghua University (Science and Technology), 2001, 41(6): 23-26.
[23] Zhang Hongcai, Tian Kanli, Chen Chen, et al. A high voltage high power switching power amplifier[C]// 2023 IEEE 5th International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 2023: 234-239.
[24] 程炜超, 谢振宇, 张云聪, 等. 重载磁悬浮轴承电控系统的研究[J]. 机电工程, 2019, 36(6): 562-567.
Cheng Weichao, Xie Zhenyu, Zhang Yuncong, et al. Electric control system of heavy-load magnetic bearing[J]. Journal of Mechanical & Electrical Engin- eering, 2019, 36(6): 562-567.
Abstract The power amplifier constitutes the critical actuating element in active magnetic bearings (AMBs). While elevating input voltage enhances dynamic response characteristics, this approach introduces significant operational challenges. High-voltage operation induces excessive voltage stress on power switching devices, escalates switching losses, and generates substantial electromagnetic interference (EMI) during circuit operation. A fundamental constraint of conventional three-level configurations is their fixed input voltage maintenance, regardless of tracking error magnitude, which leads to aggravated circuit stress conditions. Furthermore, the power switching devices exhibit particular vulnerability under combined high-voltage, high-current, and high-frequency switching conditions, potentially compromising AMBs' operational safety. Switching device failures generally manifest as either open-circuit or short-circuit modes. Compared to open-circuit failures, short-circuit faults present more severe consequences. Effective fault-tolerant strategies must therefore integrate rapid detection mechanisms with responsive protection measures to mitigate overcurrent risks in load coils during short-circuit events.
Firstly, this paper introduces the operational principle of a five-level power amplifier topology, guided by the design philosophy of “high voltage for large errors, low voltage for small errors”. The analysis demonstrates that under high dynamic response requirements, the five-level switching power amplifier circuit operates at a high voltage level while maintaining dynamic response capabilities equivalent to those of three-level ones. Conversely, under low dynamic response requirements, the five-level switching power amplifier circuit switches to a low-voltage level, where its input voltage is reduced to half that of conventional amplifiers. This voltage reduction halves the voltage stress on power electronic devices. Accordingly, voltage breakdown risks are mitigated, and the switching loss and electromagnetic noise in the circuit are reduced. Furthermore, a control strategy is presented for five-level operation, defining three distinct operational modes: low-voltage, transitional, and high-voltage. Through analytical derivation, we establish the critical current frequency governing inter-mode transitions and map the operating modes of five-level switching amplifiers across different AMBs speed ranges.
This paper then presents a fault-tolerant strategy for switch device short-circuit conditions in respective bridge arms of a five-level switching power amplifier topology. Furthermore, a diagnostic method is proposed through real-time monitoring of current flow in bridge arm freewheeling diodes and verification against predefined logical relationships with switching states. The implemented fault-tolerant strategy allows for a seamless transition between normal and fault-tolerant operation modes through controller parameter adjustments, completing mode switching within a single switching cycle.
Finally, the experimental results verify that the five-level switching power amplifier successfully tracks reference currents at different frequencies and maintains preset operational states. Compared with three-level switching power amplifiers, the five-level configuration demonstrates superior operational performance. When short-circuit faults occur in switching devices, the five-level switching power amplifier rapidly transitions to fault-tolerant states while maintaining continuous operation.
Keywords:Active magnetic bearings, switching power amplifier, short-circuit fault, fault-tolerant control
中图分类号:TH133.3; TH113.1
DOI: 10.19595/j.cnki.1000-6753.tces.250234
太行国家实验室课题(A2063)和国家基础科研计划(2022-ZD-232, 2019110C026)资助项目。
收稿日期 2025-02-17
改稿日期 2025-03-25
刘紫怡 女,1999年生,硕士研究生,研究方向为主动电磁轴承开关功率放大器。
E-mail: ziyiliu@zju.edu.cn
祝长生 男,1963年生,教授,博士生导师,研究方向为转子系统动力学、高速电机及飞轮储能等。
E-mail: zhu_zhang@zju.edu.cn(通信作者)
(编辑 崔文静)