 (1)
(1)
摘要 为解决永磁同步电机(PMSM)有限控制集(FCS)驱动系统中参数在线辨识的难题,该文针对现有电感辨识方法依赖基波电压与转子位置信息且存在欠秩问题的局限,提出一种融合电流微分与几何信息驱动(CDGI)的神经网络电感在线辨识方法。该方法首先建立电流微分与电感之间的几何映射关系,实现电感观测与基波电压、转子位置的解耦;在此基础上构建带有几何约束的神经网络训练策略,并结合几何图形驱动的数据增广方法以提升网络的泛化性能与抗干扰能力。所提方法在一台基于FCS模型预测控制的实验平台上进行了验证,并与IEEE 1812标准离线测试方法和现有在线辨识方法进行了对比。结果表明,所提CDGI神经网络观测器在全运行工况下稳定运行,即使平均d轴电流为零仍能保持稳定观测,辨识结果的方均根误差小于5%。
关键词:永磁同步电机 电感辨识 几何信息 神经网络
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)目前广泛应用于船舶推进、机器人直驱关节、航空航天等领域。这些应用场合对电机驱动系统的动态响应、效率、可靠性提出了严苛的要求[1-2]。为应对这些实际需求,大量基于电机模型的高性能控制、监测策略被相继提出[3-5]。然而,基于PMSM数学模型的方法难免受到参数失配的影响,尤其是电感参数受电流影响大、变化快,对控制和故障检测等建模精度影响最为显著[6-7]。
考虑上述问题,国内外研究提出了大量的电感参数在线辨识方法[8-9]。稳态下PMSM的数学模型仅有两个电压方程,同时观测4个参数存在欠秩问题[10-11]。此外,现有传统电感观测方法通常基于PMSM的平均值模型,该模型假设稳态下电流微分项为0,这导致当电流较小或执行id=0 A控制时方程可观测性进一步受限。为解决欠秩问题,常见的解决方法是将电阻、磁链和dq轴电感分组进行观 测[12-15]。早期经典文献中,分快、慢时间尺度观测电阻-磁链和dq轴电感[12],两组观测器输出参数存在耦合,收敛性受初始值影响。文献[13]中将电阻磁链通过实验标定拟合为绕组温度的函数,使用拟合的电阻和磁链观测电感。另有文献[14]提出离线测试拟合不同电流下的dq轴电感函数,用于在线更新观测电阻、磁链和逆变器非线性补偿项。上述分组观测的方法虽然可以将单个观测器的待观测量缩减至两个,但对于id=0 A或dq轴电流均较小时仍面临欠秩问题。为此,这些方法不得不注入各种类型的周期性扰动信号。注入信号包括数百赫兹的方波、正弦波、三角波电流扰动[16-18],亦有研究在控制环路引入位置角偏差[19],其近似于同时引入dq轴电流偏置。这些额外注入的扰动降低电机效率并增加了转矩脉动,带来诸多不利影响。另有一类方法试图引入人工智能的手段解决上述欠秩问题[20-21],然而这些方法选择的神经网络输入仍然是基波电压、采样电流、位置角,部分方法需要额外注入控制器参数变化的扰动[21]。考虑上述方法神经网络并未包含时序信息,无法实现微分,固其仍可视为平均值模型方法。此外,这些模型训练和推理过程不含有任何电机物理信息,缺乏物理可解释性。
为了避免使用平均值模型带来的欠秩等问题,新近提出的一类在线电感辨识方法选择利用电流微分信号提取电感。文献[22]提出一种基于有效信息迭代的快速粒子群优化算法,在电机方程动态模型中保留电流微分项对电感和磁链进行观测,但该方法基于最大转矩电流比控制的假设,并未讨论小电流、零电流下的观测问题。另一类方法中将电机空间矢量脉宽调制(Space Vector Pulese Width Modu- lation, SVPWM)的电压信号视为激励,采样电流纹波作为响应,避免了额外注入[23-24];然而考虑到SVPWM的电流纹波信噪比较低,提出额外加入高带宽的有源运放微分电路提取电流微分信号,降低系统可靠性的同时提高了成本。应注意的是,上述方法由于依赖SVPWM的有效矢量-零矢量电压组合进行推导,难以拓展至电流纹波信噪比更高、更适合提取电流纹波的有限控制集(Finite Control Set, FCS)控制策略,如直接转矩控制(Direct Torque Control, DTC)和FCS-模型预测控制(Model Predictive Control, MPC)等。
综上所述,现有基于平均值模型的电感在线观测方法难以避免欠秩和额外注入扰动的问题,且其需要使用调制波电压,因而无法拓展至FCS类非调制的控制策略。同时,现有基于电流微分模型的电感在线观测方法[23-24],受限于SVPWM电流微分信噪比低的问题难以应用,对于FCS类控制策略的拓展研究不充分。此外,这类电流微分模型方法对于采样噪声等非理想因素影响相较平均值模型方法更敏感,建模及补偿困难。
针对上述问题,本文提出将电流微分信息映射为几何坐标输入神经网络,设计了一种电流微分与几何信息驱动(Current Derivative and Geometric Information-driven, CDGI)的神经网络电感观测器。所提CDGI神经网络观测方法仅需采集由电流微分信号生成的几何坐标作为样本数据,不依赖数据的时序性和连续性。在训练阶段,基于物理信息嵌入式神经网络的思想[25],设计了带有几何信息约束的损失函数,确保CDGI神经网络观测模型符合物理模型规律,提高了模型的可解释性。电感在线观测阶段,引入几何边界条件进一步确保输出电感值符合物理约束。在实验中通过与IEEE 1812标准测试提取的电感值的对比,验证了所提方法的准确性,并在动态扰动工况下与现有先进方法[24]对比,验证了观测器的有效性和稳定性。
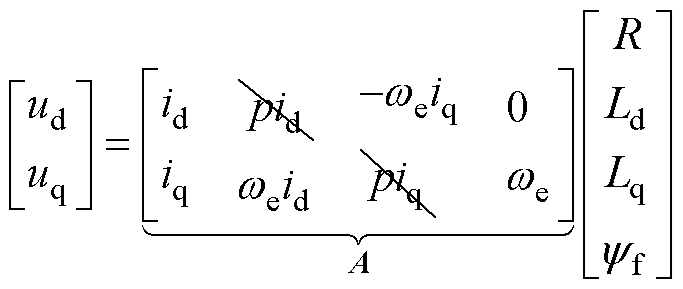
现有传统在线电感辨识方法常常通过PMSM的平均值模型提取电机参数,其矩阵形式表示如式(1)所示,平均值模型中的电流微分为0被约去。
(1)
式中,u、i、 分别为电压、电流、电角速度;R、L、
分别为电压、电流、电角速度;R、L、 分别为电机电阻、电感和磁链;下标中的d、q对应变量的d、q轴分量;p为微分算子。
分别为电机电阻、电感和磁链;下标中的d、q对应变量的d、q轴分量;p为微分算子。
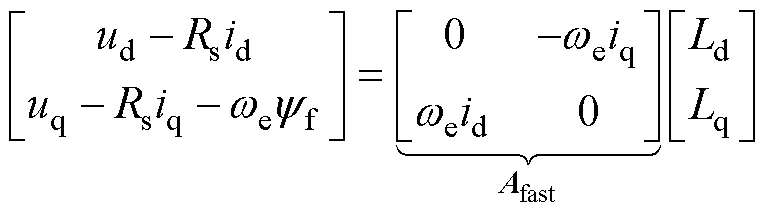
可以发现,当处于稳态下式(1)中的矩阵A不可逆,使用此模型设计的参数观测器没有唯一解。因此,一种方案是将式(1)划分为快、慢时间尺度下的两组观测器,以快时间尺度的电感观测为例,表达式为
 (2)
(2)
式中,Rs为相电阻;Afast矩阵可逆。该方案需假设一组观测器输出参数相对另一组为已知,因此观测性能受初值和时间尺度划分设置的影响。且当d轴电流较小,矩阵第一行中Ld相关变量将消失,同样存在欠秩问题。
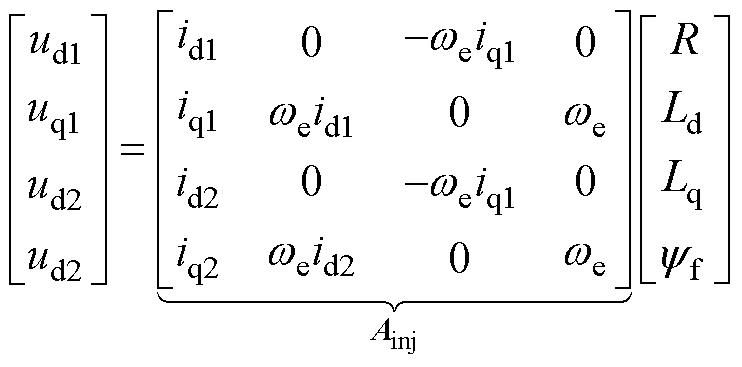
第二种方案是注入额外信号扩展A矩阵的维度,有
 (3)
(3)
式中,下标中1、2表示两种不同的电流状态,当两种状态下的电流变量不相等时,矩阵Ainj是可逆的。该方法改变了电机运行状态,带来额外损耗和噪声。
上述平均值模型电感辨识方法的拓扑如图1所示,除了提到的欠秩和注入等问题外,这些方法拓展至不含调制环节DTC或MPC时,还面临着难以获取基波电压ud、uq的问题。此外,当转子位置角度产生偏差,电流的旋转变换将不准确,直接影响电感观测结果。
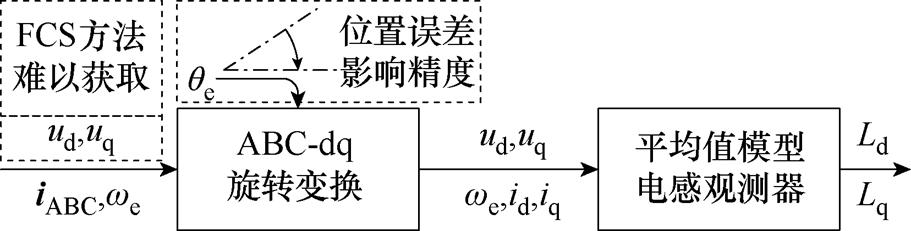
图1 平均值模型电感辨识方法的拓扑
Fig.1 Topology of the average value model-based inductance identification method
为避免平均值模型方法中的欠秩问题和注入信号带来的负面影响,有必要引入额外的电机模型维度,从中提取电感信息。本节基于逆变器开关时间尺度下的PMSM电压方程建立与电阻、磁链相解耦的电流微分-电感模型。为避免角度对观测的影响,进一步建立虚拟电压矢量参考系,并推导得到该虚拟参考系下的电流微分-电感模型。
由式(1)可以发现,除了dq轴耦合的反电动势项ed,q中存在电感外,电流微分项同样包含电 感,有
 (4)
(4)
为了从电流微分项中提取电感,此处引入逆变器开关时间尺度的概念,定义逆变器每个开关状态对应周期,第k周期的电压方程可写为
 (5)
(5)
此处引用开关时间尺度电机模型方法中常用的假设[23-25]:反电动势的变化频率远小于开关状态周期,因此两个开关状态间可视为相等,即ek≈ek-1;同时电阻压降项中高频电流产生的压降远小于电感电压,因此电阻压降可视为仅含基频分量,两个开关状态间可视为不变。基于上述假设,取两周期式(5)相减以消除电阻和反电动势项的耦合影响,可以得到逆变器开关时间尺度下的电流微分-电感模型为
 (6)
(6)
该电感模型中虽然出现了电压分量,但区别于平均值模型方法,开关时间尺度下的模型是基于开关状态离散的。模型中的电压分量表示逆变器不同开关状态下的瞬时电压,这些电压可以通过逆变器的开关状态直接计算获知。与此同时,死区效应也被视为一个短暂作用的零矢量状态。因而,当取任意两个离散周期的开关时间尺度模型相减时,不需要考虑死区效应的影响,无需对电压进行死区补偿[26]。
可以观察到,2.1节中的开关时间尺度电感模型需要使用dq系下的变量,仍受到转子位置反馈误差等的影响。为了避免转子位置角对于观测的影响,此处引入一种新的xy参考系,将x坐标轴定向于两个开关状态对应电压矢量之差
 的方向,其中,
的方向,其中, 即虚拟电压矢量,其模长为
即虚拟电压矢量,其模长为 ,相位为
,相位为 。定义x轴和d轴的夹角为
。定义x轴和d轴的夹角为 ,d轴与A相的夹角为,x轴和自然坐标系A相的夹角等于虚拟电压矢量的相位,虚拟电压参考系如图2所示。
,d轴与A相的夹角为,x轴和自然坐标系A相的夹角等于虚拟电压矢量的相位,虚拟电压参考系如图2所示。
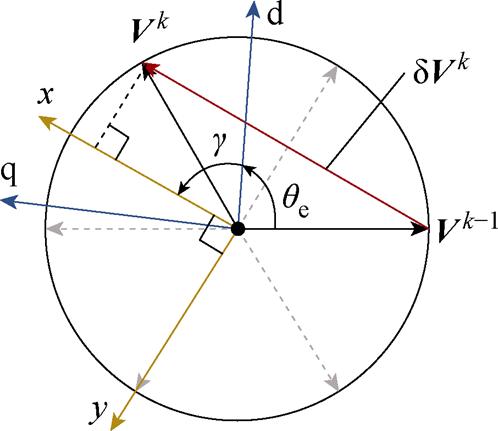
图2 虚拟电压矢量参考系
Fig.2 Virtual voltage-vector reference frame
使用旋转变换将式(6)变换至xy参考系,可以得到虚拟电压矢量xy参考系下电流微分-电感模型为
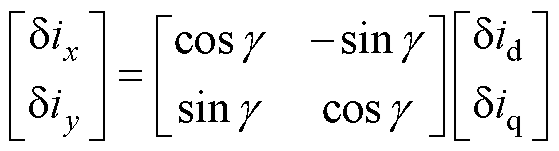 (7)
(7)
 (8)
(8)
式中,xy系电流微分项可以使用虚拟角度旋转变换,此处给出查找表见表1,可以降低实时运算负担。表中,V0、V7为零矢量,V1~V6为有效矢量。
表1 xy轴定向角查找表
Tab.1 Lookup table of xy axis orientation angle 
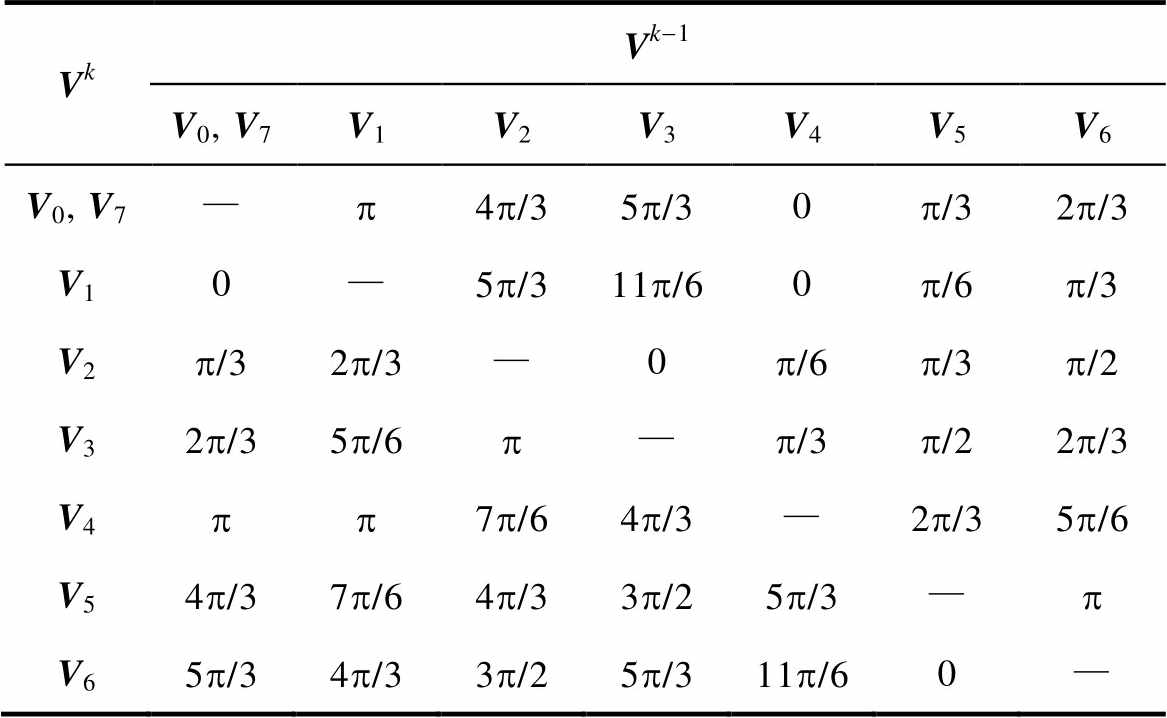
VkVk-1 V0, V7V1V2V3V4V5V6 V0, V7—p4p/35p/30p/32p/3 V10—5p/311p/60p/6p/3 V2p/32p/3—0p/6p/3p/2 V32p/35p/6p—p/3p/22p/3 V4pp7p/64p/3—2p/35p/6 V54p/37p/64p/33p/25p/3—p V65p/34p/33p/25p/311p/60—
然而,式(8)中等式右侧仍然包含了角度项,未完全实现位置解耦。2.3节将推导基于几何图形的转子位置-电感解耦方法。
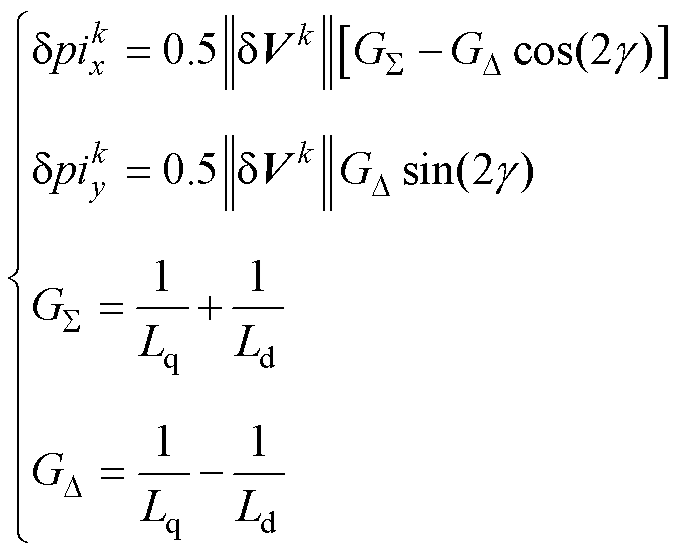
观测式(8)可以发现,其中虽然包含了角度相关的项,但xy系方程互相解耦,且三角函数项同为2倍角。因此,将式(8)中第一式、第二式移项并做二次方和运算,可以消去三角函数部分,有
 (9)
(9)
其中
 (10)
(10)
推导得到的式(9)为一个圆的标准方程,其圆心坐标为 ,半径为
,半径为 。圆上坐标点(X, Y)可由电流微分
。圆上坐标点(X, Y)可由电流微分 及虚拟电压矢量模长
及虚拟电压矢量模长 计算得到。
计算得到。
当电机运行于稳态工况时,式(9)所示的圆心与原点的距离 和半径可视为常数,当电感值变化时,则圆的图像随之变化。数值仿真得到的电流微分-电感几何图形如图3所示。
和半径可视为常数,当电感值变化时,则圆的图像随之变化。数值仿真得到的电流微分-电感几何图形如图3所示。
图3中给出了一组q轴电感降低前后的几何图形,可以发现其形状和变化趋势与式(9)推导一致。由基本几何原理可知,对于圆心位于坐标轴上的圆,仅需两点即可求得其半径和圆心距,计算表达式为
 (11)
(11)
图3 数值计算的理想电流微分-电感几何图形
Fig.3 Current derivative-inductance geometry in ideal numerical calculation
式中,(X1,Y1)、(X2,Y2)为两组坐标点。
然而,式(11)中的直接解析计算存在下述问题:
(1)第一式包含了除法运算可能放大电流微分信号中的干扰。而第二式使用了第一式的结果,将进一步放大噪声。
(2)在该解析计算表达式中加入采样噪声、交叉耦合等非理想因素的补偿较为复杂。
图4给出了基于实际采样数据绘制的几何图形,可以发现,此时该圆形存在非高斯分布的噪声导致畸变,难以通过少数点直接解算电感。因此,有必要进一步优化几何模型中的电感信息提取方法。
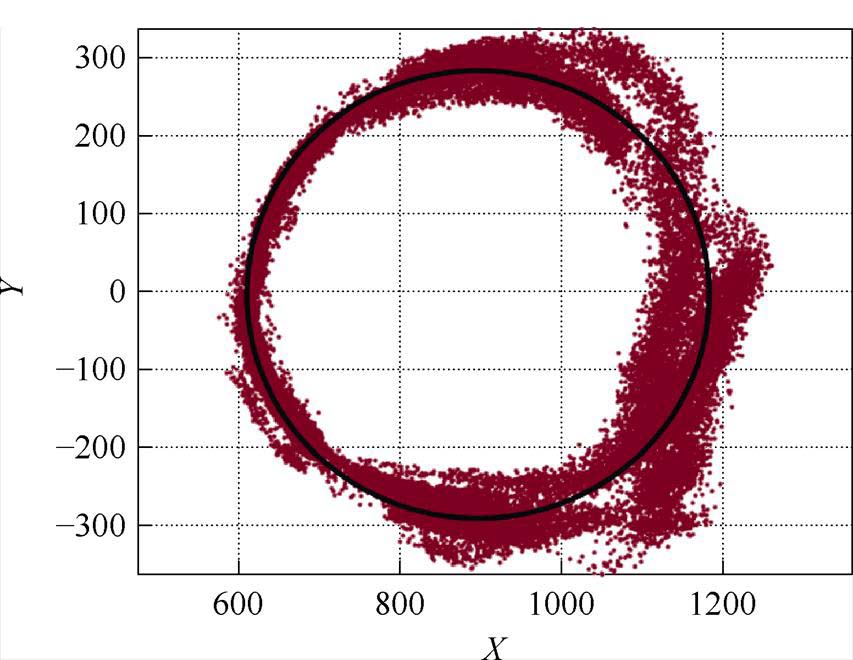
图4 基于实验数据绘制的电流微分-电感几何图形
Fig.4 Current derivative-inductance geometry obtained in the experiment
为了解决第2节提到实际电机驱动系统中存在的非理想因素影响,本节提出一种基于电流微分与几何信息驱动(CDGI)的神经网络电感观测方法。首先,设计了几何信息驱动数据增广方法,扩充有限的实验数据。然后,引入物理信息神经网络的思想[25],设计提出一组带有几何信息约束嵌入式损失函数。最后,对于训练得到的CDGI神经网络,在线观测过程中亦加入了几何约束边界,以确保推理过程符合物理规则。
现有的神经网络电感观测器使用平均值模型进行观测,其往往需要采集dq同步旋转系或ABC自然坐标系下PMSM的电流、电压、角度、转速等多个变量实现观测。同时,平均值模型方法考虑高频注入等,因此数据包含了时序信息,对于提取训练数据的时间戳一致性要求严苛,可能在训练过程中对于数据时序过拟合。这些原因导致现有方法采集高质量训练数据时较为困难,训练成本高。
由第2节推导可知,当电机系统运行在稳态时,本文所提的电感几何图形稳定不变,因此通过圆上的任意两点均可以推算出和,并不需要考虑时序数据的连续性。这意味着任一稳态工况下采集的任意时刻(X, Y)坐标均可组合使用,即便训练阶段执行随机排列亦无显著影响,该特性可以有效避免模型对于数据时序的过拟合。因此,本文在电机正常运行过程中,配置控制器以1 kHz频率打包上(X, Y)坐标,并由上位机保存。采集工况包含120%额定电流范围内,2 A为间隔的全部工作点,有
 (12)
(12)
对于训练工况点间隔较大的问题,本文所提出的电流微分-电感几何模型相较传统电机模型更易于执行数据增广。编写脚本生成带有不同噪声水平的标准圆数据对于实验工况点的空缺区间进行插补。这一过程可以实现更全面的工况覆盖,并降低由数据损失分布不均等导致的过拟合问题。此处生成的数据遵循
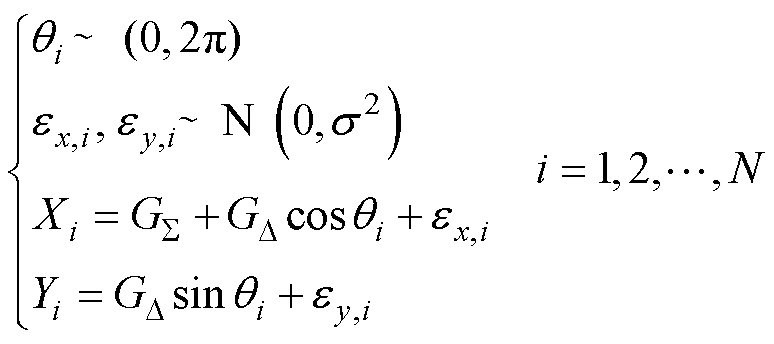 (13)
(13)
式中,算法基于随机的离散角度 生成给定圆周上的坐标点,同时向部分理想数据注入符合方差
生成给定圆周上的坐标点,同时向部分理想数据注入符合方差 的高斯分布噪声
的高斯分布噪声 和
和 。
。
综上所述,本文所提出的数据采集和几何模型的增广处理如图5所示。数据采集包含了四部分:
(1)基于特定工况实验数据的电流微分-几何坐标记录得到实时的(X, Y)坐标数据序列。
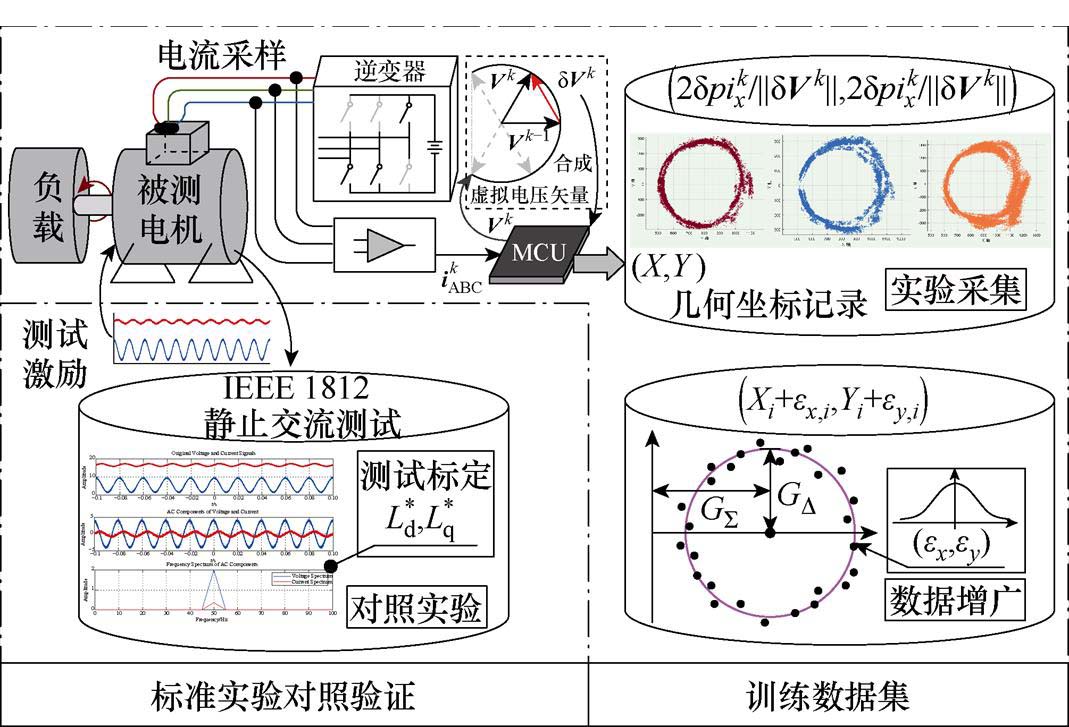
图5 数据采集及基于几何模型的增广处理
Fig.5 Data acquisition and augmented processing based on geometric models
(2)几何模型驱动的数据增广处理得到的各测试工况间隔插补的(X, Y)坐标数据序列。
(3)将每种特定工况下采集到10 s的坐标点进行批量坐标拟合,得到如图4中黑色标准圆所示的几何图形及其函数表达式,从中获取半径和圆心坐标,进而计算电感目标值 、
、 ,实现有监督学习。
,实现有监督学习。
(4)IEEE标准提到的离线测试方法作为对照,该部分内容在第4节实验部分详细讨论。
在3.1节的基础上,可以进一步设计CDGI神经网络并进行模型训练。首先,考虑到电感变化较为迅速,因此网络推理更新间隔应尽量短,此处CDGI神经网络设计为四输入两输出的结构,输入两组坐标点(X1, Y1)和(X2, Y2),输出 、
、 。给定方均误差(Mean Squared Error, MSE)损失函数LMSE如式(14)所示,其评估了模型前向传播输出与全部工况下采集的几何坐标批量拟合得到、的偏差情况。
。给定方均误差(Mean Squared Error, MSE)损失函数LMSE如式(14)所示,其评估了模型前向传播输出与全部工况下采集的几何坐标批量拟合得到、的偏差情况。
 (14)
(14)
式中,上标“ ”表示对应变量的观测值。
”表示对应变量的观测值。
可以设计一种简单的几何半径损失函数为
 (15)
(15)
式中, 为模型输入坐标点到估计圆心坐标点的距离。
为模型输入坐标点到估计圆心坐标点的距离。
然而,考虑实际采样过程中由于2.3节所述的非理想因素,计算得到的坐标点将产生漂移,若使用简单的几何半径损失,网络将难以提取这些非线性特征且容易产生过拟合等问题。因此,进一步设计基于几何模型的损失函数Lgeo为
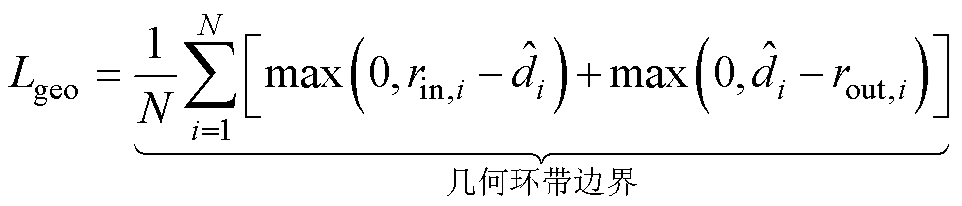 (16)
(16)
式中,Lgeo的物理意义表示为几何环带边界限制;rin和rout分别为内环带和外环带,其定义如图6所示。本文基于实验系统坐标的实际偏移范围,动态设置环带宽度变量 。
。
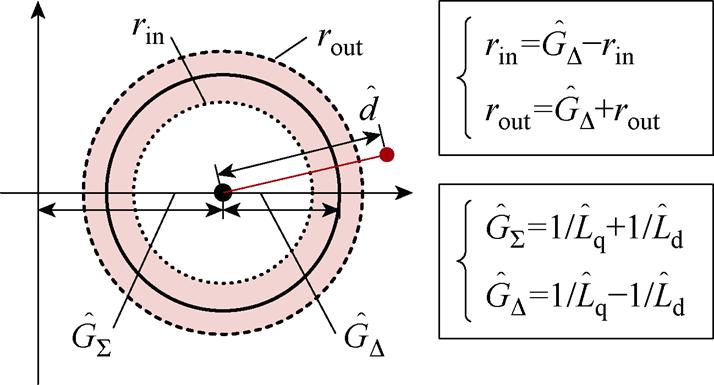
图6 CDGI神经网络的几何环带边界
Fig.6 Geometric zone boundary of CDGI neural network
综上所述,总的损失函数可表示为
 (17)
(17)
式中, 为权重项超参数初始值,可根据两类损失的物理量计算初值,并在此基础上调整为
为权重项超参数初始值,可根据两类损失的物理量计算初值,并在此基础上调整为
 (18)
(18)
为确定网络参数,此处评估权衡工程应用中控制器算力和网络复杂度,参考工业常用带有浮点计算单元的意法半导体控制器手册,计算资源消耗见表2,实验测试统计了验证集上电感估计的方均根误差(Root Mean Square Error, RMSE)随网络结构变化的关系如图7所示。可发现,当单层网络超过60神经元,精度提升效果减缓,但计算负担仍呈线性上升。增加网络层数亦未体现显著优化效果,而计算负担显著上升。综上所述,考虑观测器计算耗时应小于控制耗时,同时权衡估计精度,本文选择单个隐藏层、60神经元的前馈神经网络结构,激活函数为低计算负担的ReLU。整体CDGI神经网络结构和几何约束损失函数如图8所示。网络数学表达式写为
 (19)
(19)
式中,W1, W2和b1, b2分别为网络权重和偏置参数矩阵。
表2 微控制器的浮点运算开销
Tab.2 Time consuming of float point calculation for microcontrollers
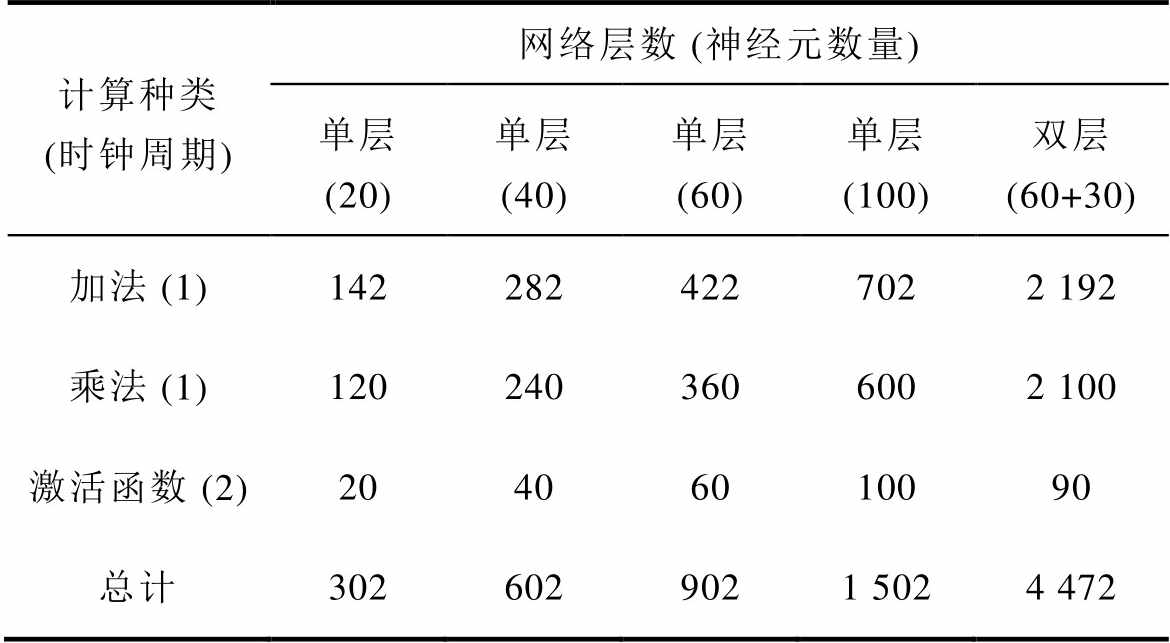
计算种类 (时钟周期)网络层数 (神经元数量) 单层 (20)单层 (40)单层 (60)单层 (100)双层 (60+30) 加法 (1)1422824227022 192 乘法 (1)1202403606002 100 激活函数 (2)20406010090 总计3026029021 5024 472
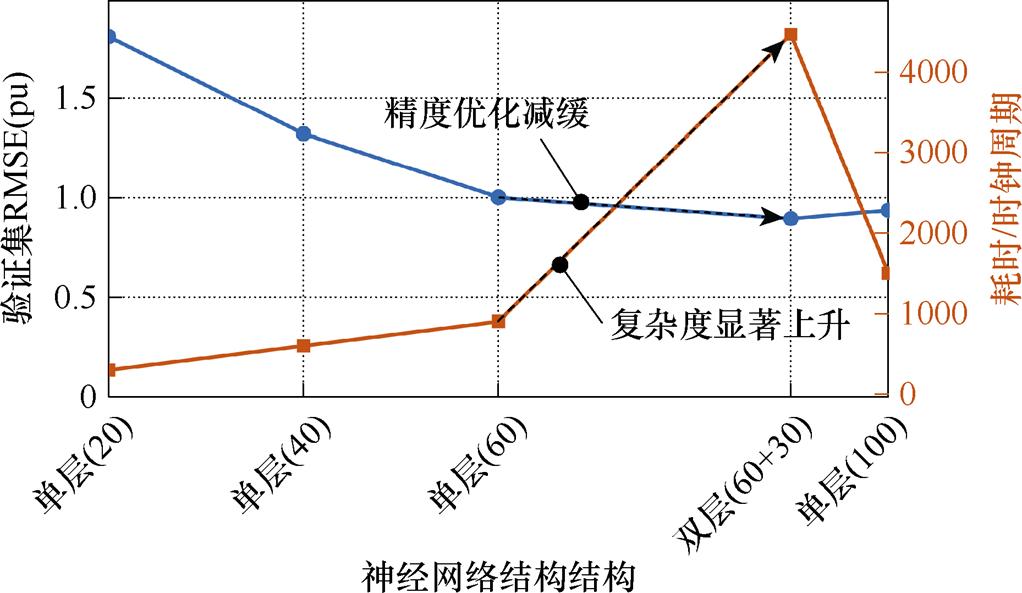
图7 神经网络理论结构和验证集误差
Fig.7 Neural network structural and validation error
基于上述设计,所提出CDGI神经网络的推理过程框图如图9所示。流程如下:
(1)由两个开关状态的电压矢量合成虚拟电压矢量,分解其幅值和相对A相的角度。
(2)观测器读取控制器输出的电压矢量和相电流并计算电流微分 。并将通过角度变换到xy坐标系得到
。并将通过角度变换到xy坐标系得到 。
。
(3)将等代入式(10)计算几何坐标(Xi, Yi)。
(4)将两组坐标(X1, Y1)和(X2, Y2)输入神经CDGI网络进行在线推理。
如图9中推理过程所示,CDGI神经网络输入的坐标点也需加入图10中的几何约束,以确保观测电感结果符合几何模型限制且有物理意义。不符合条件的点将被跳过。此处约束表示为
 (20)
(20)
 (21)
(21)
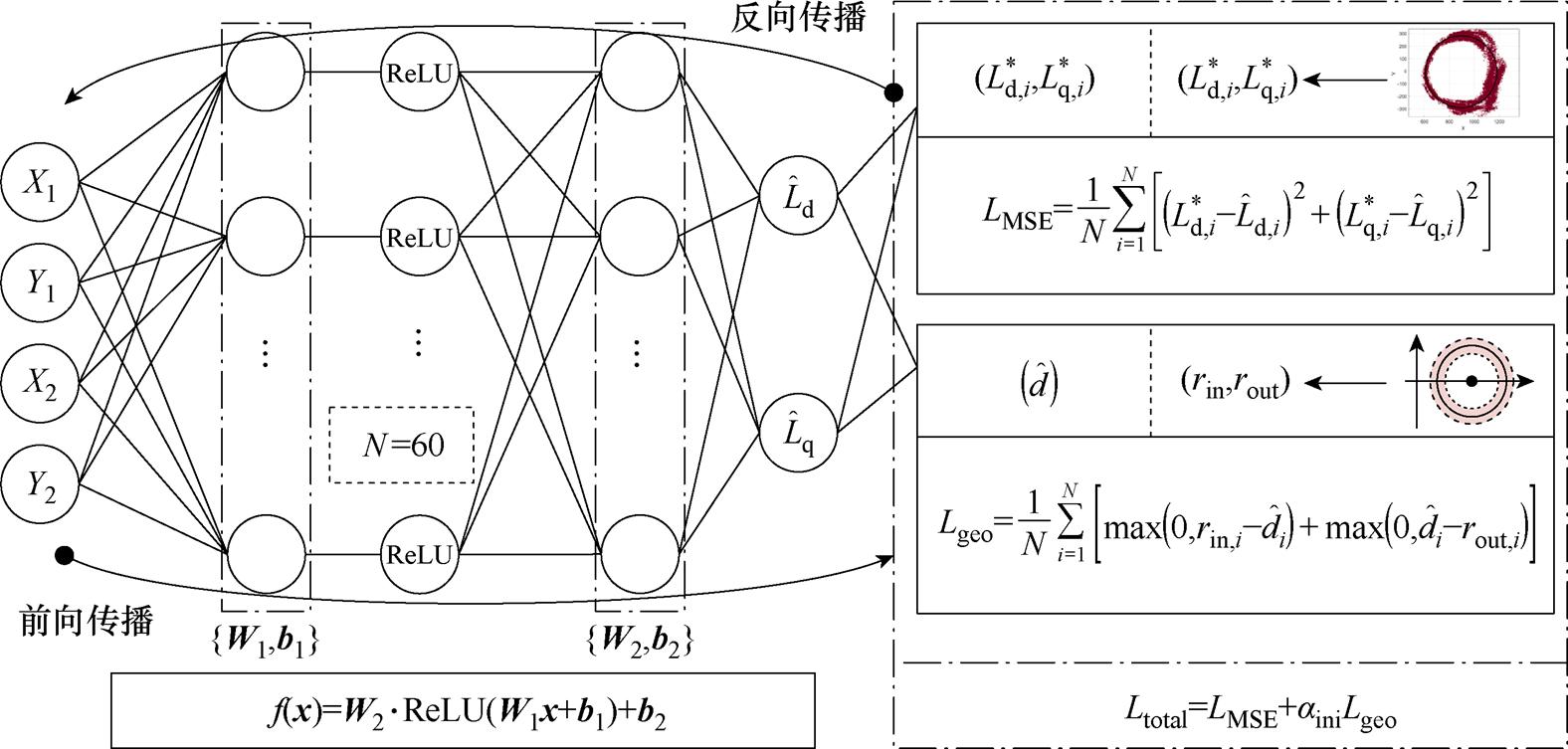
图8 CDGI神经网络结构和几何约束损失函数示意图
Fig.8 Geometric zone boundary of CDGI neural network
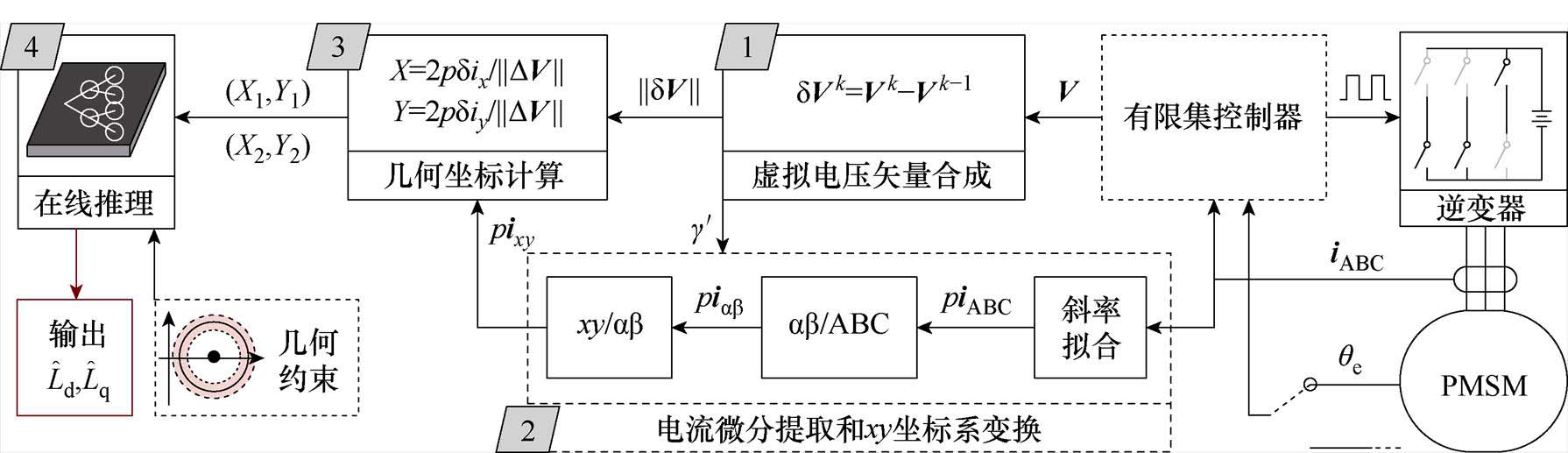
图9 CDGI神经网络电感观测器的推理过程
Fig.9 Reasoning process of CDGI neural network inductance observer
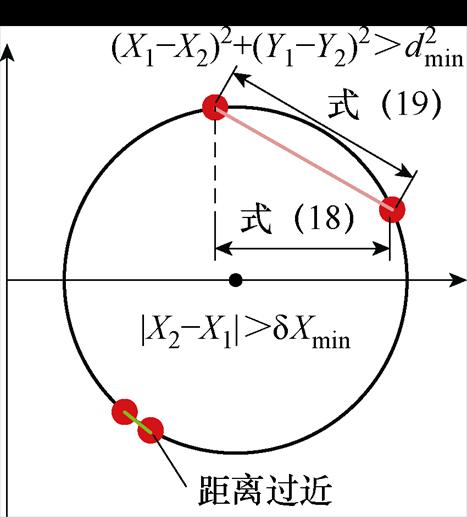
图10 推理过程中的几何约束
Fig.10 Geometric constraints during reasoning
式(20)中约束条件 表示坐标点横向最小距离,推导来自式(11)中分母不等于零的要求,而式(21)中约束条件的物理意义为圆上两坐标点之间的距离不可过小,保证图形拟合中的数值计算精度。实际工程中,可以将第一条约束条件合并进式(21),仅判断距离满足要求即可。考虑逆变器的虚拟电压矢量组合是离散且有限的,因此两个不同虚拟电压矢量作用下坐标点非零最小距离(定义为d*)可以得到解析表达式,然而考虑到该值同时与位置角、dq轴电感多个维度相关,表达式复杂,此处直接给出了d*随电机转子位置、凸极比变化的计算结果,如图11所示,图中,d*的标幺化基准为
表示坐标点横向最小距离,推导来自式(11)中分母不等于零的要求,而式(21)中约束条件的物理意义为圆上两坐标点之间的距离不可过小,保证图形拟合中的数值计算精度。实际工程中,可以将第一条约束条件合并进式(21),仅判断距离满足要求即可。考虑逆变器的虚拟电压矢量组合是离散且有限的,因此两个不同虚拟电压矢量作用下坐标点非零最小距离(定义为d*)可以得到解析表达式,然而考虑到该值同时与位置角、dq轴电感多个维度相关,表达式复杂,此处直接给出了d*随电机转子位置、凸极比变化的计算结果,如图11所示,图中,d*的标幺化基准为 。在实际参数辨识过程中选取最小距离dmin的原则为
。在实际参数辨识过程中选取最小距离dmin的原则为
 (22)
(22)
具体取值应根据系统实际采样精度、噪声等硬件性能适当调整。
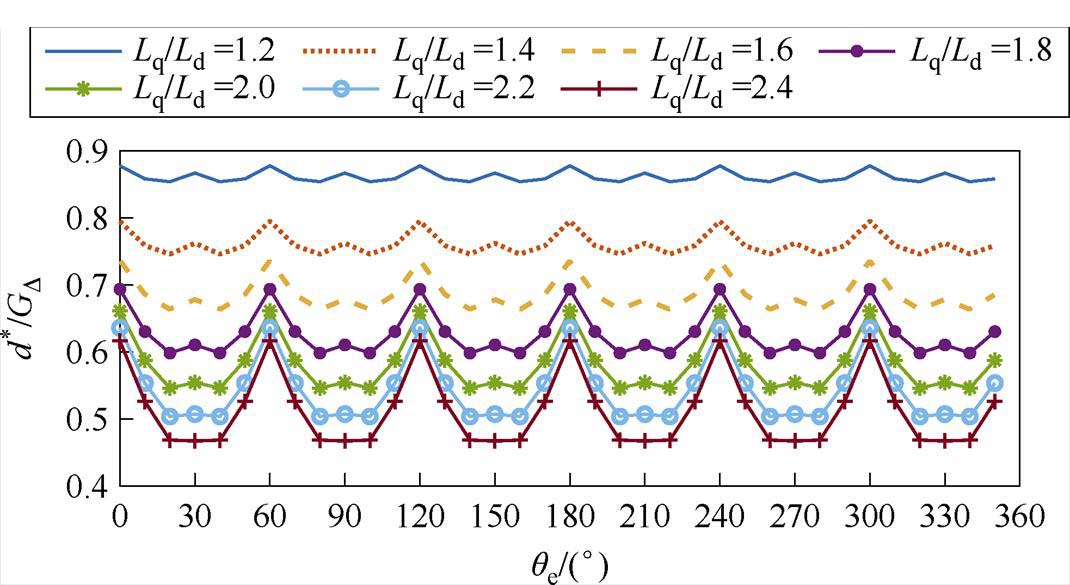
图11 不同电感参数和转子位置下基于 标幺化的d*
标幺化的d*
Fig.11 Value of d* normalized based on under different inductance parameters and rotor positions
考虑训练数据采集的便利性,本文实验平台控制器选用dSPACE MicroLabBox。该控制器中可实现1 MHz高频多采样技术,此处采样间隔配置为3 ms,该配置应视实际系统传感器带宽、控制器性能调整。高频采集得到的电流由控制器内部的FPGA进行最小二乘拟合[27],实验平台和电流微分采样策略如图12所示。所使用电流传感器为莱姆公司的LA 55-P型号,配置电流微分采样起始时刻tss适当大于死区时间tdead和寄生参数导致的振荡时间tosc,此处设为20 ms。基于本文所提的开关时间尺度的虚拟电压矢量模型和电流微分采样计算策略,所提方法的电感观测具有对死区效应影响免疫的能力。应说明的是,图12b中绘制的电流采样策略拓展至多矢量驱动策略时,需要将每个电压矢量作用下的电流微分视为独立的周期,分段提取计算。此外,该控制器可通过以太网以1 kHz单包上发256个通道的数据。此处配置将10个周期的坐标(X, Y)打包上发,由于3.1节所提到,本文所提出的几何坐标方法具有对于坐标的时序信息不敏感的优势,因而即便存在少量通信丢包,并不影响数据有效性。被测电机为一台船舶推进用途的低速PMSM原理样机,采用有限集模型预测直接转矩控制(Finite Control Set-Model Predictive Direct Torque Control, FCS-MPDTC),转速由负载电机控制。被测电机参数见表3,表中电感参数为RLC电桥测试得到,可视为空载参数。
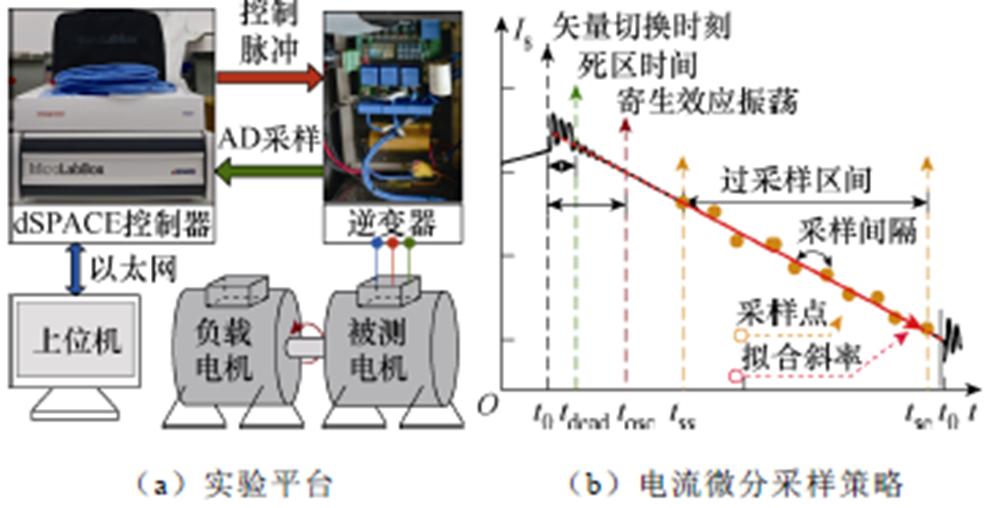
图12 实验平台和电流微分采样策略
Fig.12 Experimental platform and current derivatives sampling strategy
如3.1节提到,本文所提CDGI网络的训练属于有监督的学习,因而需要采集电感数据用于训练。此处使用采集到不同工况下的电流微分-电感几何图形进行批量数据拟合。每个工况持续10 s,因而每个工况都有超过十万个数据点保证拟合的准确性。图13展示了控制器中电流微分采样效果和基于电流微分计算得到(X, Y)坐标在时域下的图像,图中电流微分包络清晰,计算得到的坐标点y轴分量在零附近波动而x轴分量存在直流偏置,符合2.3节理论推导几何圆心在x轴上的坐标分布。应说明的是,该波形的高频跳变是因为所提xy坐标系定向角度离散变化导致的。
表3 被测电机参数
Tab.3 Parameters of the tested motor
参 数数 值 相电阻Rs/W0.2 磁链系数yf/Wb0.13 直轴电感 (电桥测试) Ld/mH1.9 交轴电感 (电桥测试) Lq/mH4.0 极数Np10 直流电压Vdc/V80 额定速度Ne/(r/min)300 额定转矩Tn/(N·m)15
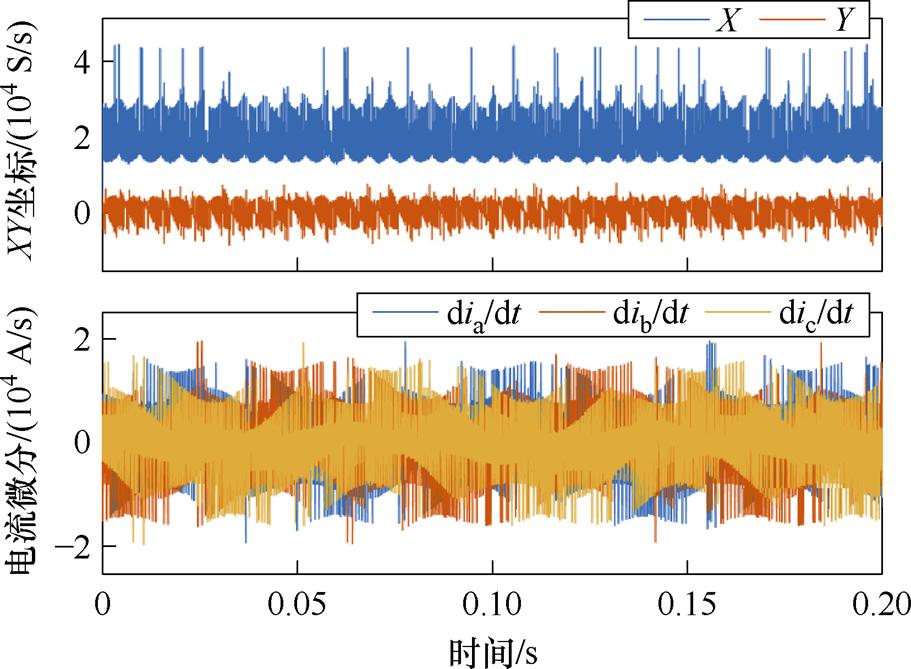
图13 电流微分采样效果和(X, Y)坐标的时域波形
Fig.13 Current derivative sampling results and (X, Y) coordinate time domain waveforms
图14给出了采集的部分工况下几何图像的拟合结果及从中提取的电感值。这些结果与对应工况电流微分生成的坐标点数据作为训练集进行训练。此处选择性展示了包括dq轴电流为0和过载(18 A)的部分工况,可以发现,即便dq轴电流为零,所提方法仍能够在不注入额外信号的前提下建立稳定清晰的几何图形,验证了该几何图像方法在全工况下不存在欠秩问题。
利用电流微分-电感几何图形拟合结果中获取的电感值对实验数据进行了标记,在此基础上完成了模型训练。所提方法训练过程的损失曲线如图15所示。训练在约第9.8万次迭代时达到设置的早停条件避免过拟合,总耗时约2 h。训练损失包括了第3.2节提及的两部分,可以发现该几何约束损失ainiLgeo在训练初期与基本方均损失差距较大,而在训练后期表现出与LMSE较好的一致性,验证了所提CDGI网络与几何约束的一致性。训练模型推理的准确性在4.3节、4.4节继续验证。
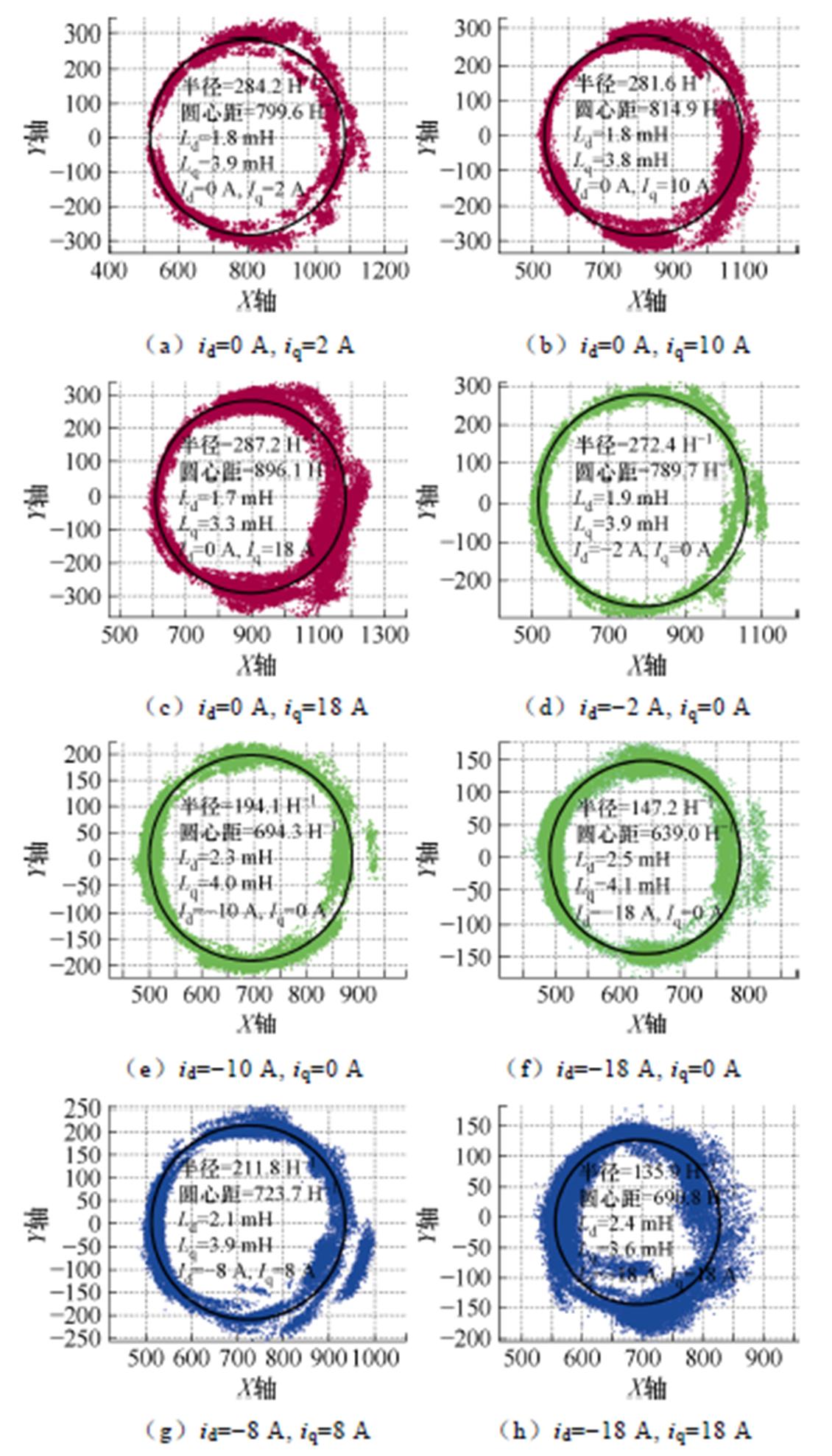
图14 部分工况下的电流微分-电感几何图形拟合结果
Fig.14 Current derivative-inductance geometry fitting results under some working conditions
考虑引言中提到传统基于平均值模型的方法无法应用于有限集控制的问题,本文选择采用IEEE 1812标准测试得到各种工况下的电感作为对照验证方法的准确性。本文考虑PMSM控制常用的id=0 A控制,选择使用IEEE 1812测试标准中提及的离线电感静止测试标定不同dq轴电流下的电感。测试硬件连接如图16所示,激励电压和绕组电流采集至示波器并经由Matlab分析计算,电感计算公式为
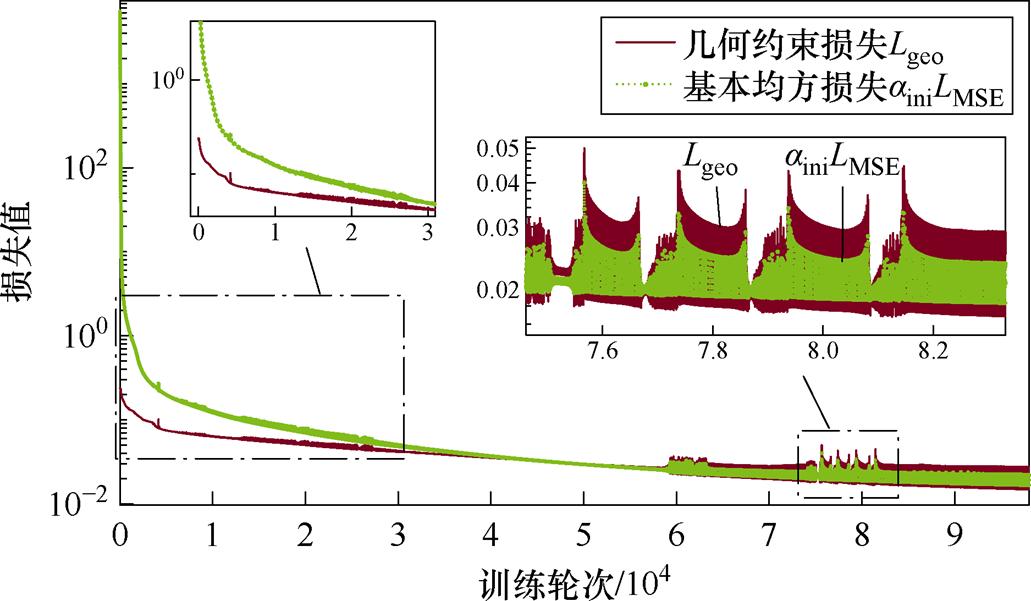
图15 所提方法训练过程的损失曲线
Fig.15 Loss curves of the training process
 (23)
(23)
式中,uac、iac分别为离线测试的激励电压、响应电流的交流分量; 为激励电压的频率;
为激励电压的频率; 为电压电流的相位差。从式(23)中可以注意到,该测试电感为增量电感,与本文所提方法观测电感类型一致,适合作为对照。
为电压电流的相位差。从式(23)中可以注意到,该测试电感为增量电感,与本文所提方法观测电感类型一致,适合作为对照。
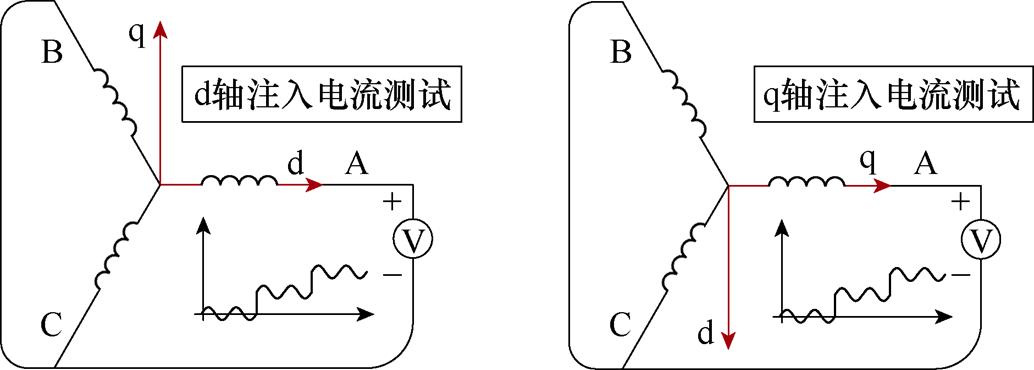
图16 离线电感静止测试方法
Fig.16 The offline inductance standstill test method
基于第4.2节的几何图形拟合及离线标准测试,现已得到了两种方法估计的dq轴电感随电流变化情况,将其与所提方法训练得到的CDGI神经网络观测结果进行对比,如图17所示。图中,4.2节批量坐标拟合得到的参考电感图例标记为“参考”,4.3节标准测试的电感图例标记为“离线”,而在线运行CDGI神经网络观测得到的结果图例标记为“观测”。基于观测数据,可以计算得拟合方法和在线方法相对于离线标准测试方法的RMSE标记在了图中。从整体趋势来看,q轴电感在线观测结果和离线测试吻合程度较高,RMSE百分比小于2%。而d轴电感的观测结果和批量拟合结果均和离线测试差距稍大,约5%。这是由于离线测试通过在dq轴注入高频交流提取增量电感,PMSM的q轴磁路几乎不存在永磁磁通,因而对于注入的交流分量不敏感;而d轴磁路由于永磁体存在初始饱和,交流分量的正半周和负半轴励磁效果不对称,带来了测试误差。且随着注入电流的增加交流分量同比增加,放大了误差。
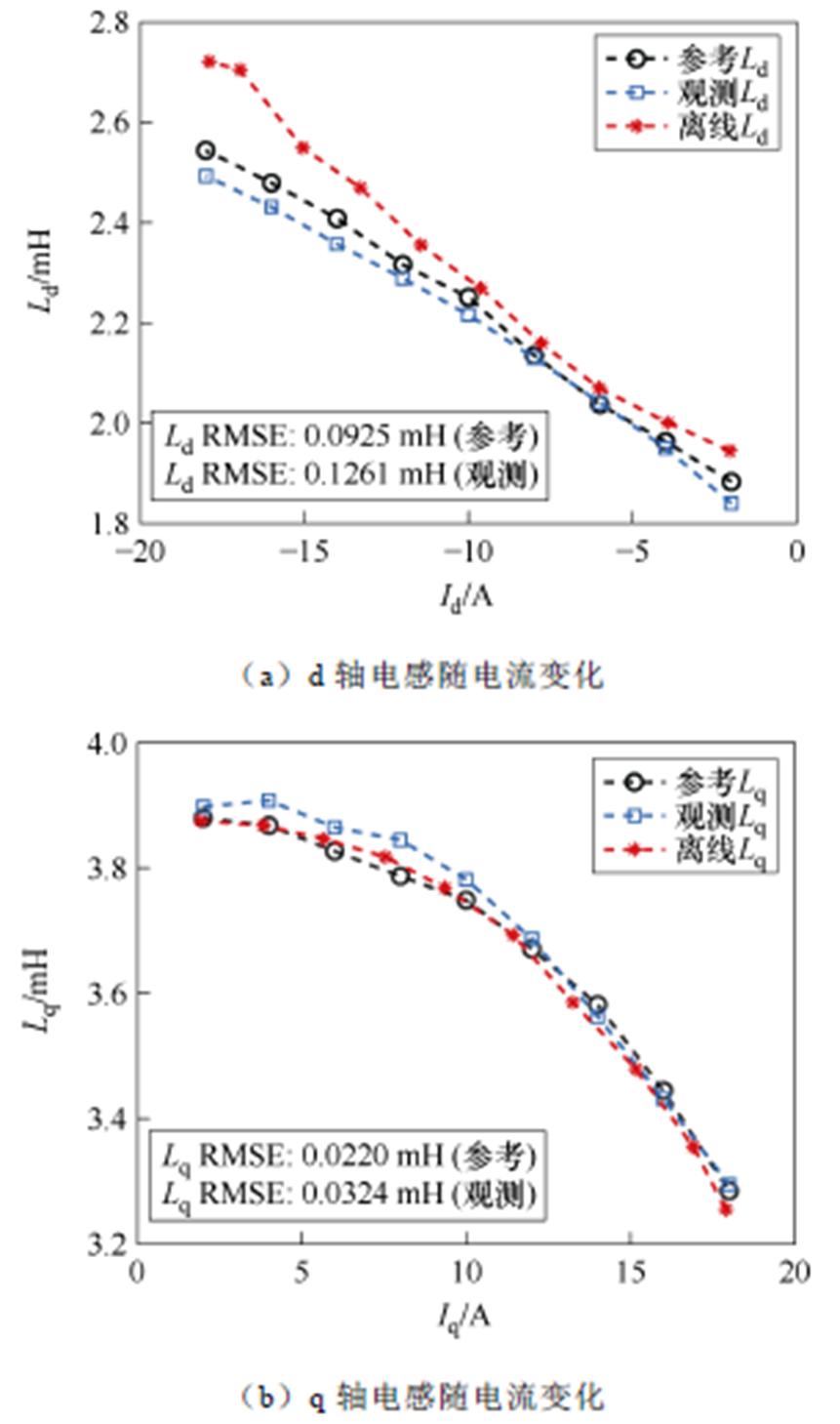
图17 所提方法与标准离线测试方法的对比
Fig.17 Comparison of the proposed method with the standard offline testing method
为了进一步验证所提方法的正确性和有效性,在时域下开展了动态、稳态的实验验证,并加入了与现有文献[23]中先进方法的对比。考虑文献[23]中电感估计模型设计在dq系下,因而需要使用转子位置角进行旋转变换(后称为“dq系方法”)。将该方法推广到任意矢量作用序列的观测,表达式简写为
 (24)
(24)
首先,图18给出了速度突变下的动态实验结果,起始时刻为0.2(pu)的低速、55%负载转矩工况,d、q轴电流分别为-2 A和10 A。在5.8 s时刻速度指令阶跃至约1.25(pu)高速,此时由于转速增加摩擦损耗等使得q轴电流轻微上升约0.15 A,d轴电流不变。全过程电感变化轻微,由几何拟合得到的dq轴电感(红色线)和CDGI方法在线观测得到dq轴电感(蓝色线)吻合程度较高。同时反馈角度准确的dq系方法(绿色线)可以得到与所提方法一致的观测结果,误差小于1%,均可正确反映电感饱和趋势。为说明所提方法实现转子位置-电感估计解耦的意义,此处补充了基于转子位置的文献[23]中dq系方法在位置反馈存在误差时的估计效果。当转子位置存在15°电角度(3°机械角度)轻微误差,此时dq系方法观测结果(黑色线)表现出超过20%的误差。综上所述,该组实验验证了电感受速度变化影响不敏感,且说明了转子位置反馈带来的影响。后续进一步验证电流(负载)变化下的电感观测性能。
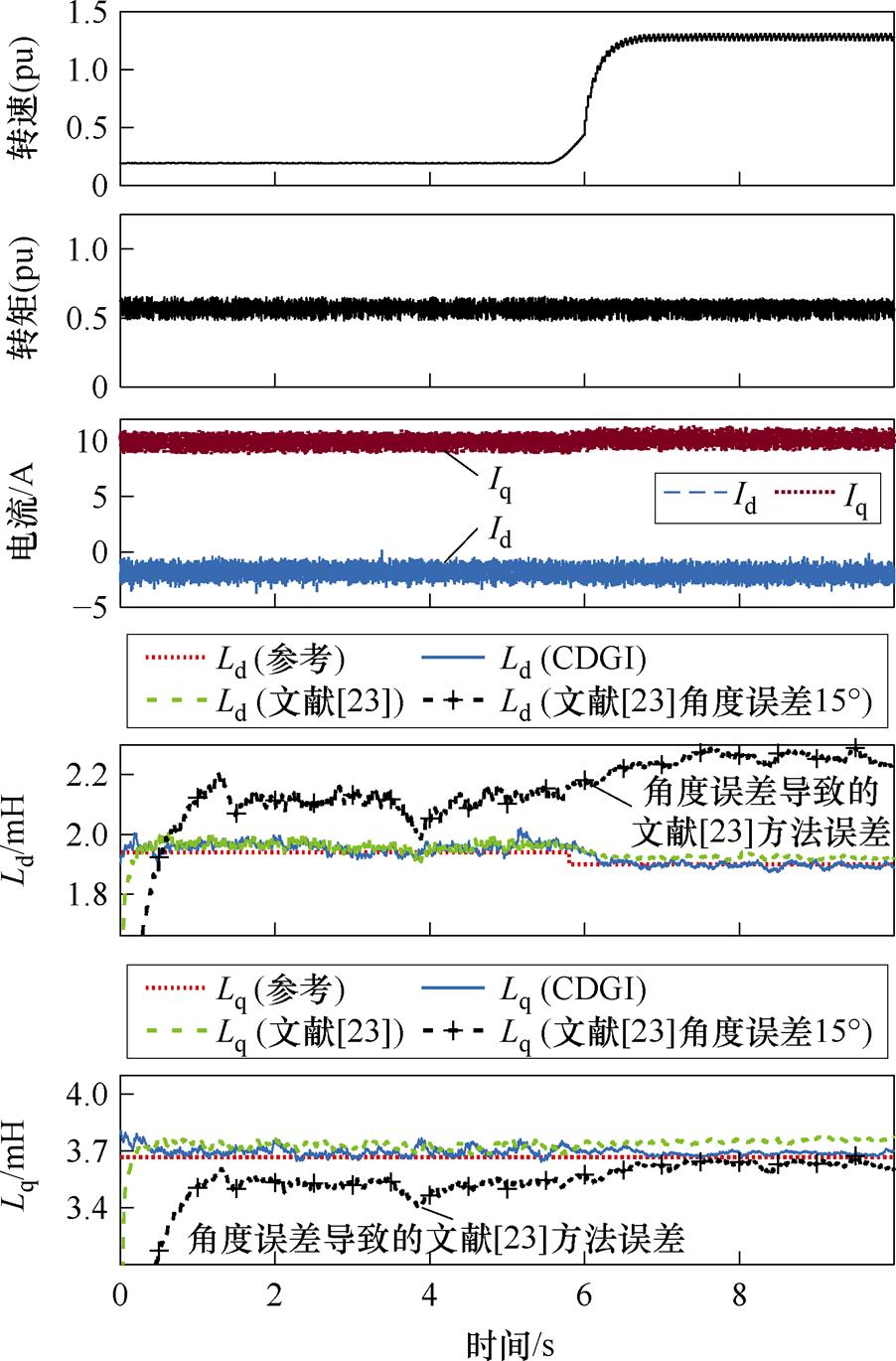
图18 速度突变实验验证
Fig.18 Speed mutation experimental verification
图19给出了一组由重载到轻载的电流突变实验,其分了三个阶段S1~S3:起始的S1阶段电机运行在dq轴电流0 A和16 A的重载下,S2阶段为过渡阶段,其dq轴电流约-8 A和14 A;S3阶段d轴电流回到0 A,q轴电流降至2 A,转矩降至约0.15(pu)。在S1和S3工况下,q轴电感基准为4.3节离线测试的Lq值,如Lq子图的紫色线所示。而由于标准离线测试中无法同时测得dq轴电感,因此,此时Ld子图中紫色虚线标示了离线的电桥测试值。从实验结果中可总结发现,所提方法的在线观测结果与离线拟合值基本一致,而S1和S3工况下的观测结果与离线标准测试中的结果趋势和数值均吻合。即便在平均id=0 A的稳态下和电流阶跃的动态过程中观测结果亦无发散、振荡等异常,能够迅速追踪电感饱和变化趋势并稳定收敛。作为对比的文献[23]中dq系方法,在角度准确时观测结果与所提方法一致,但当角度反馈存在误差,该方法无法正确反映动态下的电感变化趋势。综上所述,该实验验证了所提方法在d轴电流为零、负载动态下的有效性和动态响应,亦进一步验证了实现角度信息-电感观测解耦的意义。
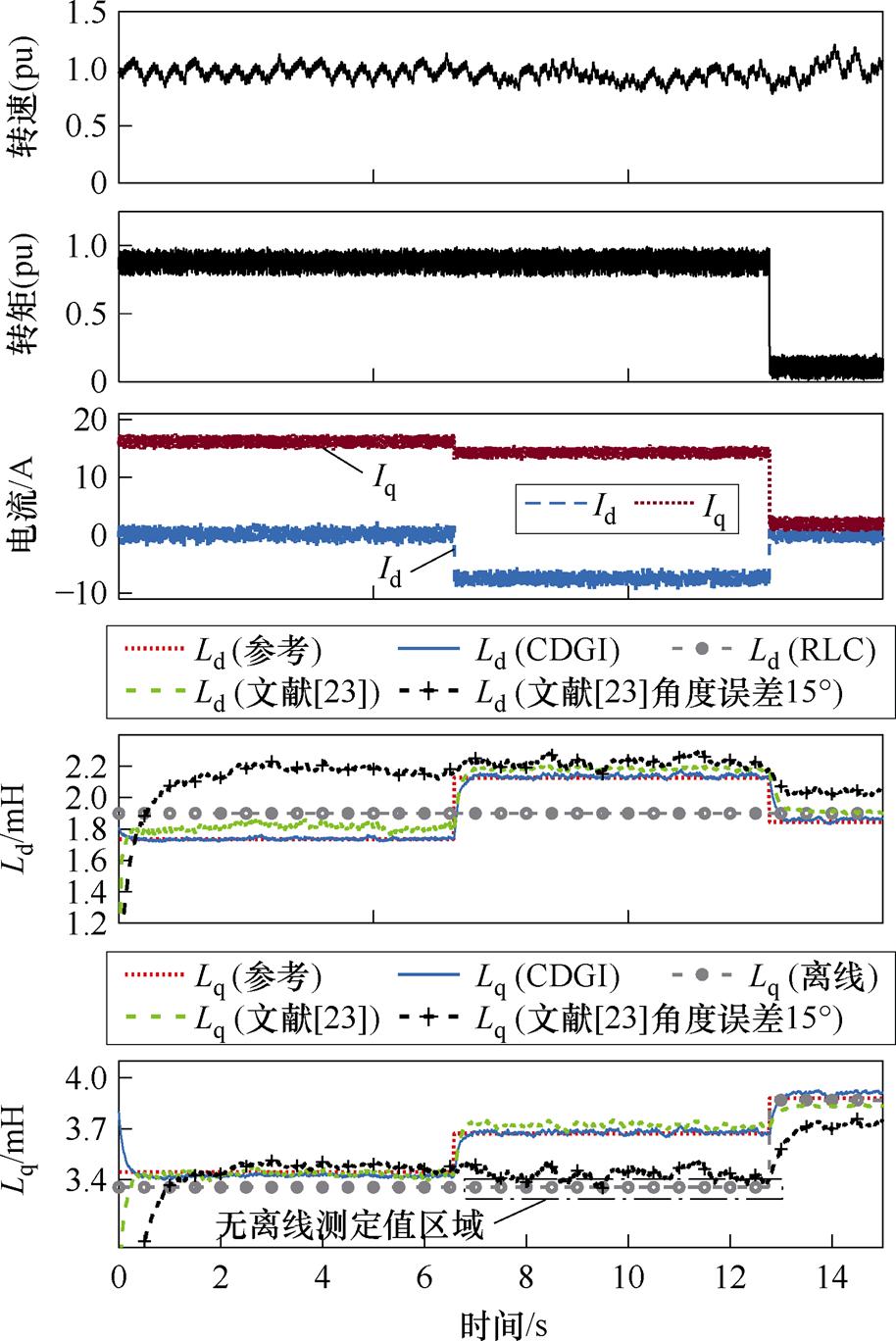
图19 负载突变实验验证
Fig.19 Load mutation experimental verification
考虑第4.1节提到本文设计了基于过采样的死区效应影响抑制策略,因而此处进一步验证不同死区效应配置下所提方法的电感估计结果,如图20所示。实验中,在1.0(pu)转速,0.5(pu)额定负载工况下,给出了较为极端的5~15 ms的死区配置。从图20中可以看出,三种死区配置下的电流微分计算结果的幅值较为一致,这是由于此处控制器设定电流采样开始于20 ms处,电流微分计算几乎不会受到死区效应影响。同时,最终dq轴电感估计值差距小于2%,印证了所提电感估计方法对死区效应的鲁棒性。
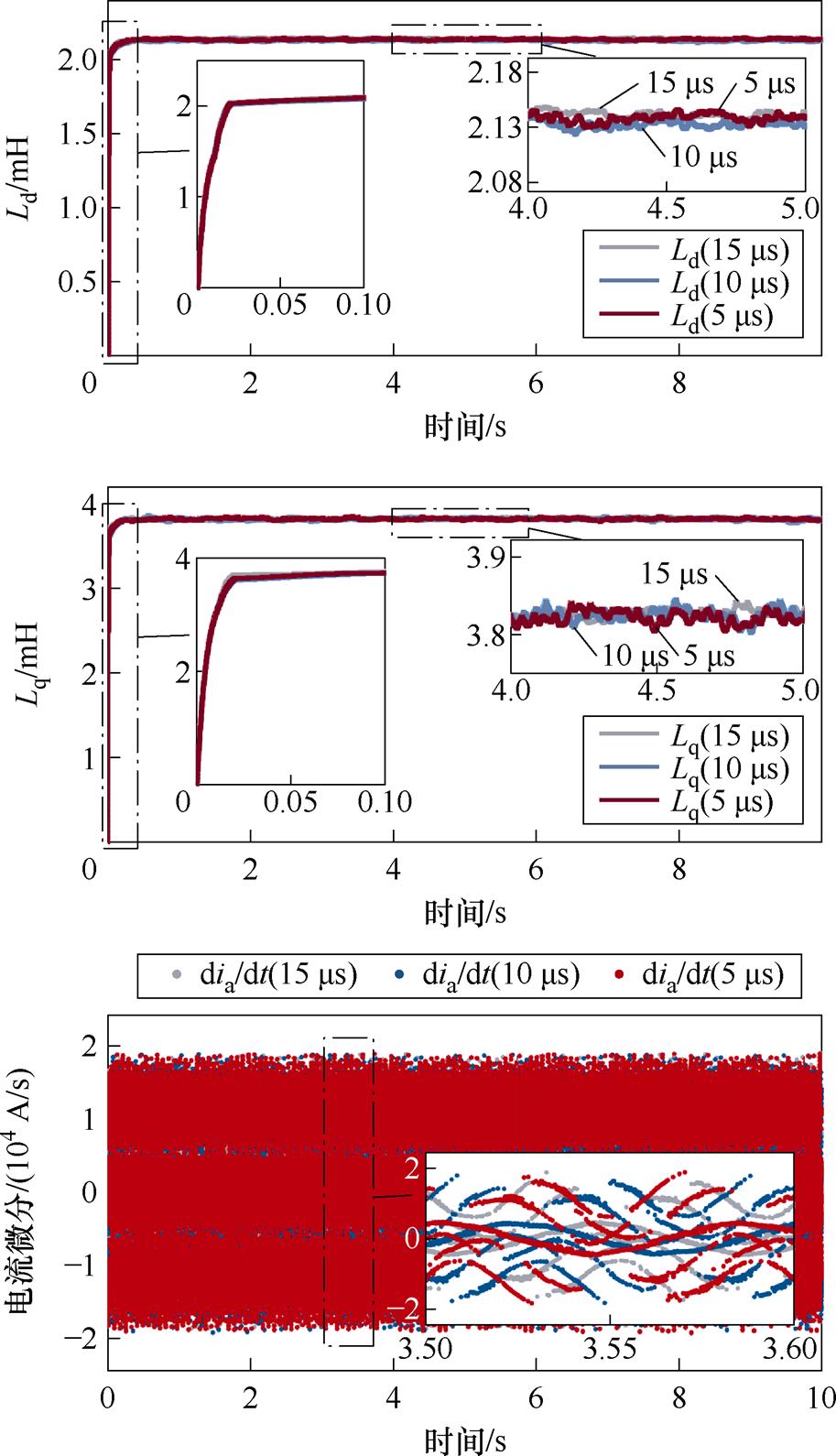
图20 不同死区配置下的电感估计和电流微分计算结果
Fig.20 Inductance estimation and current derivative calculation results under different dead-time settings
本文提出一种使用电流微分信号并嵌入几何信息约束的CDGI神经网络电感在线辨识方法。基于PMSM的开关时间尺度模型构建电流微分与电感参数的几何映射关系,将几何特征约束融入神经网络的数据生成、网络训练与在线推理过程,该方法实现了无需基波电压和转子位置的电感观测,通过几何约束提升了神经网络的可解释性。实验结果表明,所提方法与IEEE 1812标准测试结果变化趋势相符、RMSE误差小于5%,验证了其准确性。在近零d、q轴电流工况下无额外注入信号时不存在欠秩问题。在动态测试中,所提方法具有ms级的响应速度和良好的稳态性能。此外,实验中也验证了所提方法对于死区效应影响具有较好的鲁棒性。
参考文献
[1] 马伟明, 肖飞, 马凡. 舰船综合电力系统研究进展与应用建议[J]. 中国电机工程学报, 2024, 44(17): 6761-6775.
Ma Weiming, Xiao Fei, Ma Fan. Research progress and application suggestions of vessel integrated power system[J]. Proceedings of the CSEE, 2024, 44(17): 6761-6775.
[2] 张国强, 杜锦华. 永磁同步电机无位置传感器控制技术综述[J]. 电机与控制应用, 2024, 51(1): 1-13.
Zhang Guoqiang, Du Jinhua. Review of position sensorless control technology for permanent magnet synchronous motors[J]. Electric Machines & Control Application, 2024, 51(1): 1-13.
[3] 张潇丹, 段斌, 刘昌杰, 等. 基于本体追踪的永磁同步电机驱动系统开路故障诊断方法[J]. 电工技术学报, 2022, 37(13): 3341-3349, 3360.
Zhang Xiaodan, Duan Bin, Liu Changjie, et al. Open circuit fault diagnosis method for permanent magnet synchronous machine drive system based on ontology tracking[J]. Transactions of China Electrotechnical Society, 2022, 37(13): 3341-3349, 3360.
[4] 周华伟, 叶晨, 陈铖, 等. 基于转子磁链观测器的五相容错PMSM开路故障下的无位置传感器控制[J]. 电工技术学报, 2023, 38(2): 422-434.
Zhou Huawei, Ye Chen, Chen Cheng, et al. Rotor-flux observer based sensorless control of five-phase fault-tolerant PMSM with open-circuit fault[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 422-434.
[5] 周长攀, 刘海峰, 景国秀, 等. 双三相永磁同步电机缺相容错运行虚拟矢量间接修正方法及其在直接转矩控制中应用[J]. 电工技术学报, 2023, 38(2): 451-464.
Zhou Changpan, Liu Haifeng, Jing Guoxiu, et al. The indirect correction method of virtual vectors for dual three-phase permanent magnet synchronous motors under the open-phase fault and its application in the direct torque control[J]. Transactions of China Elec- trotechnical Society, 2023, 38(2): 451-464.
[6] 郭磊磊, 王朋帅, 李琰琰, 等. 不同代价函数下永磁同步电机模型预测控制参数失配可视化分析[J]. 电工技术学报, 2023, 38(4): 903-914.
Guo Leilei, Wang Pengshuai, Li Yanyan, et al. Visual analysis of parameters mismatch in model predictive control for permanent magnet synchronous motor under different cost functions[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 903-914.
[7] 肖虎, 吴公平, 龙卓, 等. 参数失配下永磁同步电机无模型定子磁链滑模控制[J]. 电工技术学报, 2025, 40(12): 3883-3894.
Xiao Hu, Wu Gongping, Long Zhuo, et al. Model-free stator flux sliding mode control for permanent magnet synchronous motors considering parameter mismatch[J]. Transactions of China Electrotechnical Society, 2025, 40(12): 3883-3894.
[8] Rafaq M S, Jung J W. A comprehensive review of state-of-the-art parameter estimation techniques for permanent magnet synchronous motors in wide speed range[J]. IEEE Transactions on Industrial Informatics, 2020, 16(7): 4747-4758.
[9] Odhano S A, Pescetto P, Ali Awan H A, et al. Parameter identification and self-commissioning in AC motor drives: a technology status review[J]. IEEE Transactions on Power Electronics, 2019, 34(4): 3603-3614.
[10] Vaclavek P, Blaha P, Herman I. AC drive obser- vability analysis[J]. IEEE Transactions on Industrial Electronics, 2013, 60(8): 3047-3059.
[11] Yu Yelong, Huang Xiaoyan, Li Zhaokai, et al. Full parameter estimation for permanent magnet syn- chronous motors[J]. IEEE Transactions on Industrial Electronics, 2022, 69(5): 4376-4386.
[12] Underwood S J, Husain I. Online parameter estimation and adaptive control of permanent-magnet synchronous machines[J]. IEEE Transactions on Industrial Electronics, 2010, 57(7): 2435-2443.
[13] 连传强, 肖飞, 高山, 等. 基于实验标定及双时间尺度随机逼近理论的内置式永磁同步电机参数辨识[J]. 中国电机工程学报, 2019, 39(16): 4892-4898, 4991.
Lian Chuanqiang, Xiao Fei, Gao Shan, et al. Parameter identification for interior permanent magnet synchronous motor based on experimental calibration and stochastic approximation theory with two time scales[J]. Proceedings of the CSEE, 2019, 39(16): 4892-4898, 4991.
[14] Lian Chuanqiang, Xiao Fei, Liu Jilong, et al. Parameter and VSI nonlinearity hybrid estimation for PMSM drives based on recursive least square[J]. IEEE Transactions on Transportation Electrification, 2023, 9(2): 2195-2206.
[15] 王奇维, 李斌兴, 潘冠丞, 等. 基于转子位置误差解耦阻抗建模的永磁同步电机电感在线辨识方法[J]. 电工技术学报, 2025, 40(2): 439-451.
Wang Qiwei, Li Binxing, Pan Guancheng, et al. Impedance model based online inductance identi- fication method of permanent magnet synchronous motor decoupled from rotor position error[J]. Transa- ctions of China Electrotechnical Society, 2025, 40(2): 439-451.
[16] Ge Yang, Song Weizhang, Wheeler P, et al. An apparent inductance online identification for sensor- less control of permanent magnet synchronous motor[J]. Electronics Letters, 2024, 60(11): e13233.
[17] Wang Qingsong, Zhao Xiaokai, Yang Pengfei, et al. Effects of triangular wave injection and current differential terms on multiparameter identification for PMSM[J]. IEEE Transactions on Power Electronics, 2024, 39(3): 2943-2947.
[18] Wu Ximeng, Zhu Ziqiang, Freire N M A. High frequency signal injection sensorless control of finite- control-set model predictive control with deadbeat solution[J]. IEEE Transactions on Industry Appli- cations, 2022, 58(3): 3685-3695.
[19] Liu Kan, Zhu Z Q. Position-offset-based parameter estimation using the adaline NN for condition moni- toring of permanent-magnet synchronous machines[J]. IEEE Transactions on Industrial Electronics, 2015, 62(4): 2372-2383.
[20] 李婕, 杨淑英, 谢震, 等. 基于有效信息迭代快速粒子群优化算法的永磁同步电机参数在线辨识[J]. 电工技术学报, 2022, 37(18): 4604-4613.
Li Jie, Yang Shuying, Xie Zhen, et al. Online para- meter identification of permanent magnet syn- chronous motor based on fast particle swarm optimization algorithm with effective information iterated[J]. Transactions of China Electrotechnical Society, 2022, 37(18): 4604-4613.
[21] 宋琳, 聂子玲, 孙军, 等. 基于参数辨识的永磁同步直线电机循环神经网络多维观测器[J]. 电工技术学报, 2024, 39(22): 7059-7072.
Song Lin, Nie Ziling, Sun Jun, et al. Multidi- mensional observer of permanent magnet synchronous linear motor recurrent neural network based on parameter identification[J]. Transactions of China Electrotechnical Society, 2024, 39(22): 7059-7072.
[22] Wang Zitan, Chai Jianyun, Xiang Xuewei, et al. A novel online parameter identification algorithm designed for deadbeat current control of the permanent-magnet synchronous motor[J]. IEEE Transactions on Industry Applications, 2022, 58(2): 2029-2041.
[23] Yu Yelong, Huang Xiaoyan, Li Zhaokai. Overall electrical parameters identification for IPMSMs using current derivative to avoid rank deficiency[J]. IEEE Transactions on Industrial Electronics, 2023, 70(7): 7515-7520.
[24] Huang Xiaoyan, Yu Yelong, Li Zhaokai, et al. Online identification of inductance and flux linkage for inverter-fed SPMSMs using switching state functions[J]. IEEE Transactions on Power Electronics, 2023, 38(1): 917-930.
[25] Fassi Y, Heiries V, Boutet J, et al. Toward physics- informed machine-learning-based predictive mainte- nance for power converters: a review[J]. IEEE Transactions on Power Electronics, 2024, 39(2): 2692-2720.
[26] 俞烨隆. 基于平均模型/开关模型的永磁同步电机电气参数在线辨识及其应用[D]. 杭州: 浙江大学, 2023.
Yu Yelong. Online identification of electrical para- meters and its applications for PMSMS based on average model/switching model[D]. Hangzhou: Zhejiang University, 2023.
[27] He Shan, Zhou Dao, Wang Xiongfei, et al. A review of multisampling techniques in power electronics applications[J]. IEEE Transactions on Power Elec- tronics, 2022, 37(9): 10514-10533.
Abstract Traditional online inductance identification methods for permanent magnet synchronous motors (PMSM) often rely on steady-state currents and fundamental voltages in the d-q frame, which limits their applicability to control strategies without voltage modulation, such as finite-set model predictive control (FCS-MPC) or direct torque control (DTC). These methods are also sensitive to rotor position errors and struggle to model non-ideal factors such as sampling noise and system nonlinearities. Therefore, this paper proposes a current derivative and geometric information-driven neural network-based online inductance identification observer (CDGI-NNIO). The method uses geometric coordinates derived from current derivatives as inputs, enabling inductance estimation without requiring fundamental voltages or rotor position.
The CDGI-NNIO method first establishes a geometric relationship between the current derivative and inductance parameters based on the PMSM physical model. This relationship is derived from the motor’s voltage equations at inverter switching, where the current-derivative term retains inductance information. By introducing a virtual voltage vector reference frame, the method decouples the inductance model from rotor position, reducing sensitivity to position errors. The extracted geometric features are then used as constraints during neural network training, enhancing the network’s physical interpretability. To improve generalization, additional training data are generated from geometric shapes. During online inference, geometric constraints ensure that the estimated inductance aligns with the physical model.
The neural network architecture uses a single hidden layer of 60 neurons with ReLU activation functions to balance computational efficiency and performance. The training process uses a custom loss function that combines mean squared error (MSE) with a geometric-constraint loss. The geometric constraint loss is based on a ring-shaped boundary, dynamically adjusted according to the experimental data’s offset range.
Experimental validation was conducted on a PMSM prototype using a dSPACE MicroLabBox controller. The proposed method was compared with offline inductance tests specified in the IEEE 1812 standard. For the q-axis inductance, the root-mean-square error (RMSE) between the online estimation and the offline tests was less than 2%, whereas for the d-axis inductance, the RMSE was approximately 5%. This discrepancy is attributed to the d-axis inductance measurement, which is affected by initial saturation caused by permanent magnets. Additionally, dynamic tests under speed and load variations confirmed the method’s stability and accuracy, with inductance estimates converging rapidly even during current step changes.
In summary, the CDGI-NNIO method provides a robust and accurate solution for online inductance identification in PMSMs, particularly suitable for control strategies that do not use voltage modulation. By leveraging current derivative and geometric information, it overcomes the limitations of traditional methods, offering a new approach for high-performance motor control.
Keywords:Permanent magnet synchronous motor, inductance identification, geometric information, neural network
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.250410
国家自然科学基金资助项目(52307051, 52077219)。
收稿日期 2025-03-17
改稿日期 2025-05-13
周杨威 男,1997年生,博士研究生,研究方向为电机控制、电机参数辨识。
E-mail: d202280788@hust.edu.cn
李华玉 男,1989年生,助理研究员,研究方向为电机参数辨识、故障诊断及其容错控制。
E-mail: lihuayu23@nue.edu.cn(通信作者)
(编辑 崔文静)