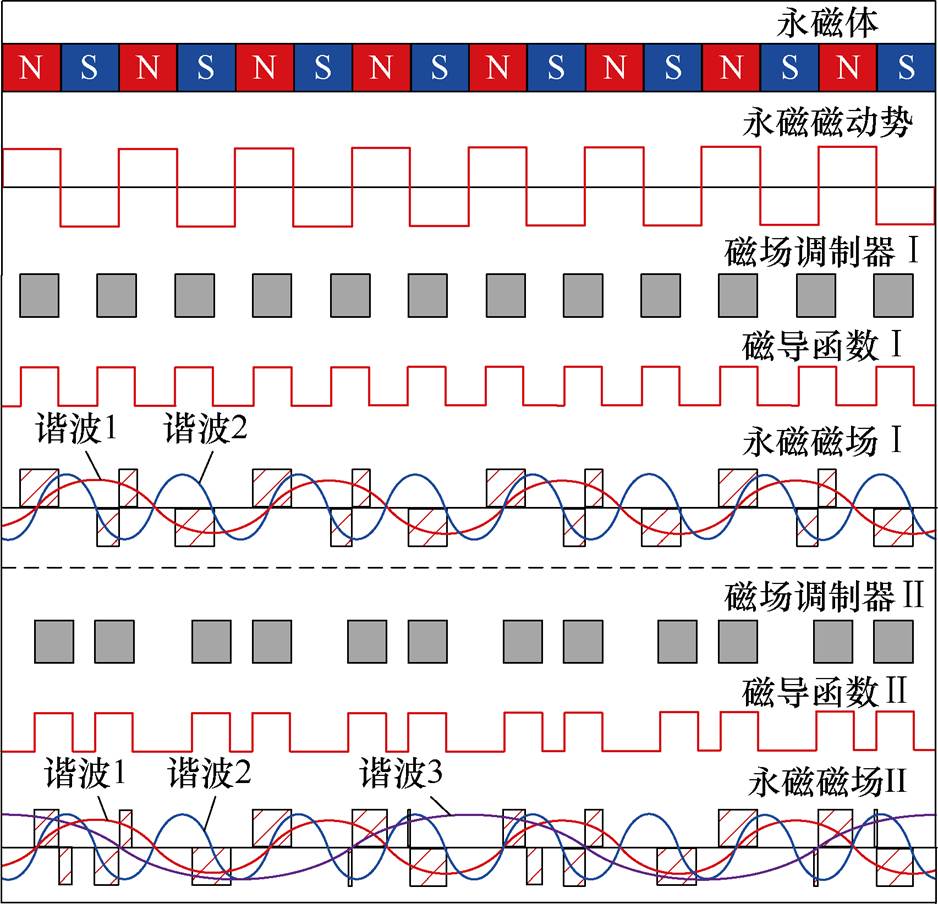
图1 磁场调制过程
Fig.1 Magnetic field modulation process
摘要 永磁游标电机的磁场调制器对磁场调制能力和输出转矩起关键作用。传统设计受限于固定齿槽形状,难以实现多裂齿结构中工作谐波的最优设计。该文提出一种多自由度磁场调制器设计方法,将结构参数细分为多个独立调制因子,借助全局优化算法寻找最佳组合,显著提升电机磁场调制能力和输出转矩。不同调制比的永磁游标电机设计表明,调制比增大虽能增强磁场调制性能,但高转子极对数会增加漏磁,不利于转矩提升,故需要权衡最大输出转矩与最佳磁场调制比。为提高优化效率,该文还提出等效裂齿结构,扩大了等效裂齿的应用范围。基于该结构设计的12s34p永磁游标电机,转矩较传统均匀裂齿结构提升了37.53%。最后制造样机并测试性能,实验结果与预期高度一致。该方法为永磁游标电机的转矩提升提供了新的思路。
关键词:永磁游标电机 磁场调制器设计 工作谐波 多自由度设计 转矩
永磁游标电机(Permanent Magnet Vernier Machine, PMVM)因其具有结构简单、转矩密度高等优点,成为风力发电、船舶推进、液压锻造等领域的重要动力源[1-3]。相较于传统的永磁电机,PMVM的机电能量转换过程更为复杂,其特点在于参与能量转换的谐波更为丰富,呈现出多工作谐波的特性[4-6]。根据磁场调制原理,PMVM可以被概括为励磁源、磁场调制器以及滤波器三大模块[7-9]。其中,磁场调制器的作用尤为重要,其不仅影响PMVM的磁场调制效果,更直接决定电机的转矩输出性能。因此,对PMVM磁场调制器进行深入的研究,有助于提升电机转矩密度,优化机电能量转换效率。
最早关于磁场调制器的研究为1995年提出的表贴式PMVM,将定子齿槽结构作为磁场调制器,能够实现磁场调制效果[10]。然而,这种形式并不适用于分数槽集中式绕组电机,因为它会造成较低的调制比,不利于电机转矩密度的提升。因此,又提出了分裂齿结构,通过特定的定转子极数配合,能够增强电机的磁场调制能力。
近年来,分裂齿磁场调制器受到了广泛的关 注[11-15]。研究结果表明,存在一个最优的裂齿数,可使电机的转矩与效率达到最佳状态,且该最优裂齿数的选择受电机尺寸的影响[16]。同时,磁场调制器的非对称分布被深入研究。这种创新设计能够在气隙内产生新的工作谐波,从而显著提高磁场调制效果,并增强电机的转矩输出能力[17]。还有研究提出了一种混合定子结构,通过将直齿与分裂齿交替排布,不仅维持了电机的转矩密度,还有效地降低了电机的永磁体极对数,进而实现了铁耗和永磁体涡流损耗的降低[18]。此外,磁场编辑的概念与方法也被提出,该方法通过精确编辑有利于转矩的谐波,构建了独特的非标准裂齿结构,从而提升了电机的磁场调制能力,为进一步提升电机转矩开辟了新的路径[19]。
实际上,上述的各项研究均为设计高性能的磁场调制器,以提升电机的磁场调制效果和转矩输出能力。然而,传统的磁场调制器设计方法受限于固定的形状和参数,难以充分发掘电机的磁场调制潜力。基于此,本文提出了一种新颖的多自由度磁场调制器。该磁场调制器将齿槽结构分解为多个独立的调制因子,调制因子可以自由组合,从而形成多样化的磁场调制器结构。该设计提高了磁场调制器设计的灵活性,能够最大限度地强化电机的磁场调制能力。随后构建了调制因子与输出转矩之间的函数关系,通过求解转矩最大值,确定各调制因子之间的组合形式,最终形成最优磁场调制器结构。
基于气隙磁场统一理论,PMVM被分为三个单元:永磁单元、调制单元、滤波单元(电枢绕组)[20]。磁场调制的本质在于调制单元形成的磁导函数对气隙磁场的影响。不同的磁场调制器能够形成不同的磁导函数,从而调制出不同的磁场谐波,磁场调制过程如图1所示。
图1 磁场调制过程
Fig.1 Magnetic field modulation process
磁场调制过程也可以用数学方式进行表示。首先,永磁磁动势基波可以表示[21-22]为
 (1)
(1)
式中,Fpm0为永磁磁动势幅值;Fpm为永磁磁动势;Br为永磁体剩磁;hm为永磁体厚度;m0为真空磁导率;mr为永磁体相对磁导率;Pr为永磁体极对数;q为转子角度;We为机械角速度。
相对磁导函数可以表示[23]为
 (2)
(2)
式中,l0为相对磁导的直流分量;li为i次谐波的幅值;Ns为定子槽数。
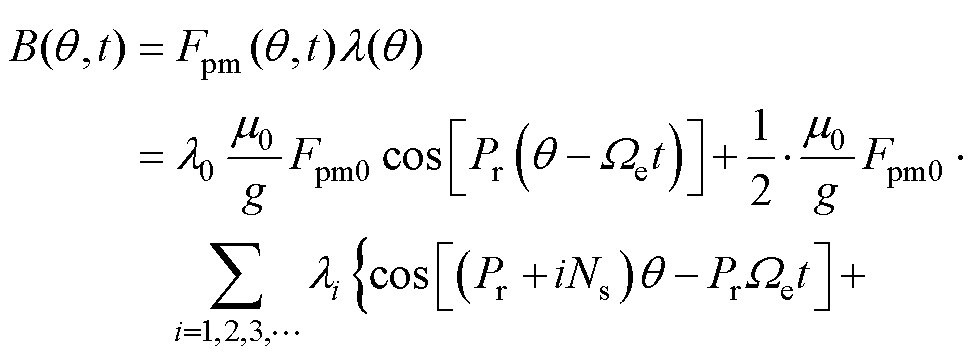
因此,推导出气隙永磁磁通密度可以表示[24-25]为
 (3)
(3)
式中,B为气隙永磁磁通密度;g为气隙长度。
气隙永磁磁通密度再经过滤波单元(电枢绕组)滤波,筛选出能够参与机电能量转换的谐波。需要注意的是,只有气隙永磁磁通密度谐波与电枢绕组函数谐波阶次相等时,才会在电枢绕组内匝链形成磁链。电枢绕组函数 可以表示[26]为
可以表示[26]为
 (4)
(4)
式中,n为绕组匝数;kwav为v次谐波绕组系数。
由式(4)与式(5)可知,能够在绕组内形成磁链的谐波有Pr、Pr+iNs、|Pr-iNs|。因此,永磁磁链可以表示为
 (5)
(5)
式中,l为铁心长度;r为气隙半径; 为Pr次谐波绕组系数;
为Pr次谐波绕组系数; 为Pr+iNs谐波绕组系数;
为Pr+iNs谐波绕组系数; 为
为 谐波绕组系数。
谐波绕组系数。
对于表贴式PMVM,采用id=0的控制策略时,平均转矩可以表示[27]为
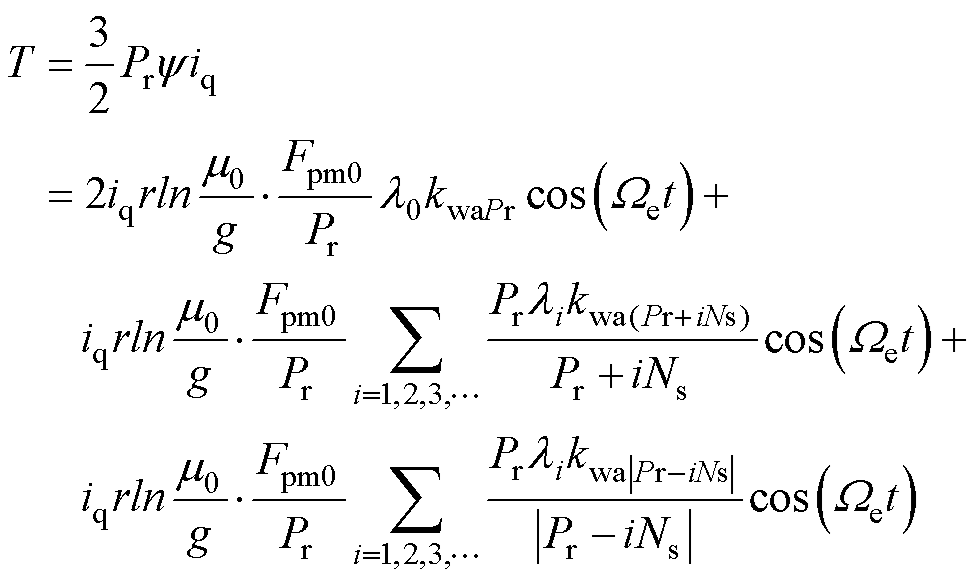 (6)
(6)
式中,iq为q轴电流幅值。
从式(6)可以清晰看到,PMVM的转矩可以分为两部分:第一部分受相对气隙磁导的直流分量影响,其转矩产生机理与传统的永磁同步电机相同;第二部分则受相对磁导的谐波分量影响,这部分转矩是由磁场调制效应引起的。由此可见,相对气隙磁导会对电机的输出转矩产生直接影响。因此,磁场调制器设计至关重要。
传统磁场调制器设计采用固定矩形齿形结构,优化自由度仅限于裂齿长度与宽度两个参数,严重限制了磁导函数设计。为此,本文提出一种多自由度磁场调制器设计方法,将齿部分离为多个可任意组合的调制因子,形成不同磁导函数。增加的磁导函数设计自由度可最大化有益的磁导谐波,最小化有害的磁导谐波,从而有效提升电机磁场调制能力。
图2为多自由度磁场调制器设计过程,首先将定子分离为两个区域:区域Ⅰ为齿槽结构靠近定子轭的部分,此部分对气隙磁导分布不产生直接影响;区域Ⅱ则是齿槽结构中紧邻气隙的部分,它对气隙磁导的分布具有直接影响,因此是定子磁场调制器设计的关键。首先,将定子槽口分解为3个调制因子,将定子齿部分解为15个调制因子,这些调制因子可以任意自由组合,形成不同的调制器结构。
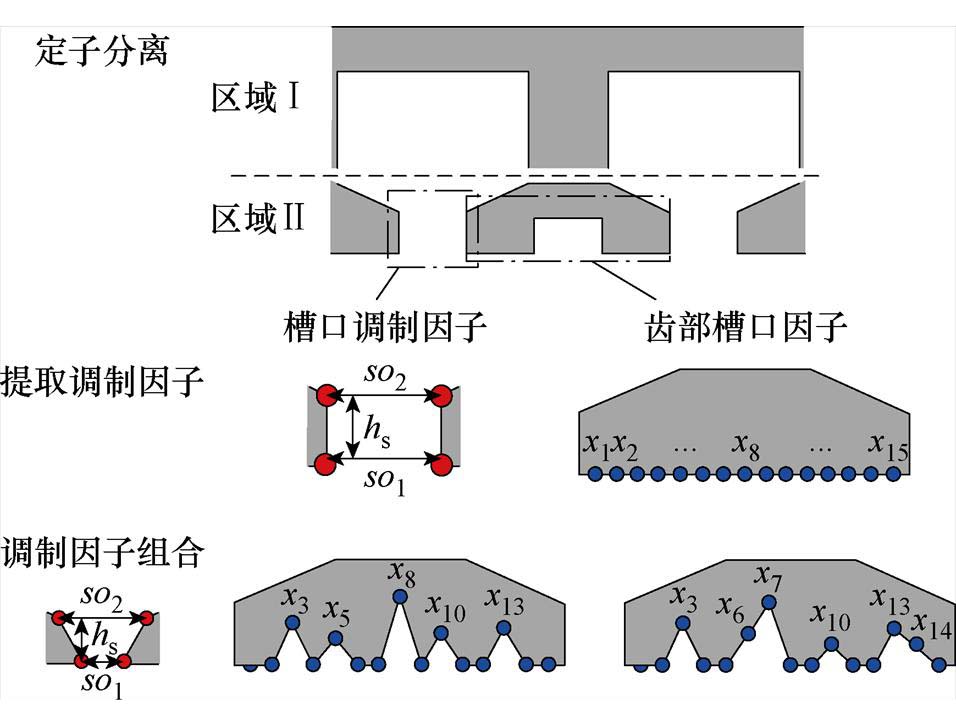
图2 多自由度磁场调制器设计
Fig.2 Design of multi degree of freedom magnetic field modulator
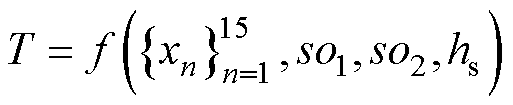
在现有电机拓扑结构下,存在一组参数可使电机转矩达到最优。本文将磁场调制器设计问题转化为以调制因子为自变量、转矩为因变量的数学寻优问题,并构建了调制因子与转矩之间的函数关系为
 (7)
(7)
式中,T为转矩;xn为齿部调制因子;so1为槽开口下底宽度;so2为槽开口上底宽度;hs为槽开口高度。
图3为多自由度调制器的优化流程。本文选用的是Altair Flux与Hyper Study联合计算的形式优化调制器。首先,在Altair Flux中重构齿槽结构并提取调制因子。然后,利用Hyper Study构建调制因子与输出转矩函数关系,设置迭代次数为200次,并采用该软件内置的全局响应搜索法求解函数最大值。当完成迭代后函数达到最大值,输出求解结果。
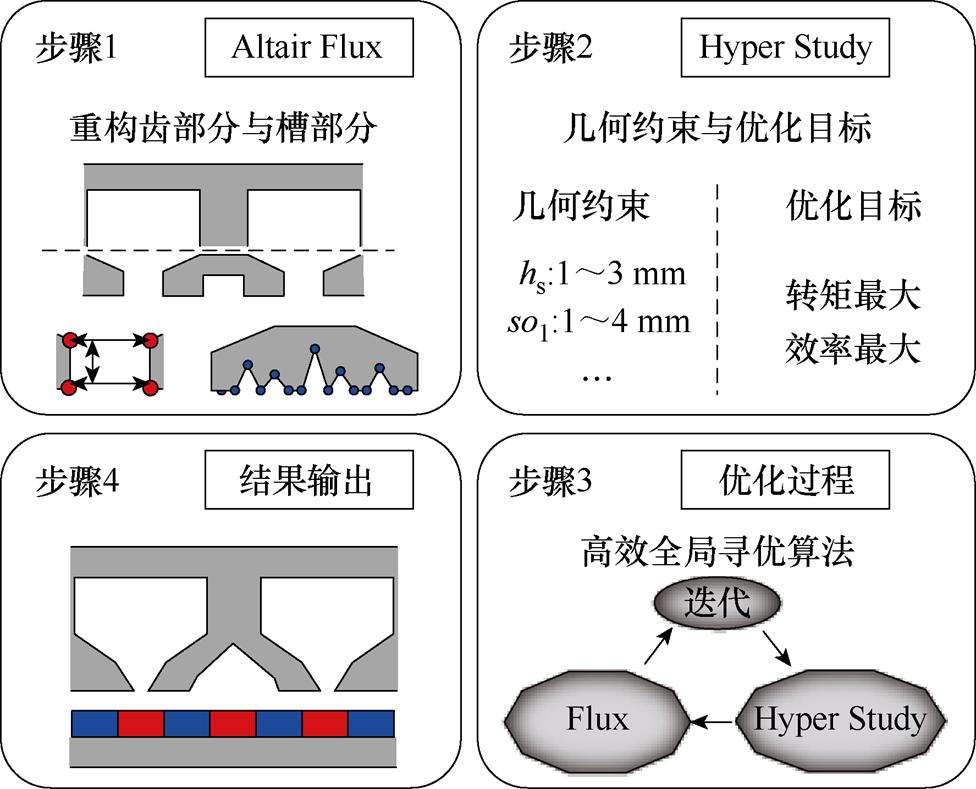
图3 调制器设计流程
Fig.3 Modulator design process
由于调制因子较多,仅选取了几个具有代表性的调制因子展示其优化过程,如图4所示。随着迭代次数增加,电机转矩逐渐趋近最大值并趋于稳定,符合优化目标。此外,优化过程还体现了调制因子的协同优化,如从so1/x8/转矩图可以看出,不同调制因子参数组合使转矩逐渐趋近最大值。综合可以说明优化方法的正确性。
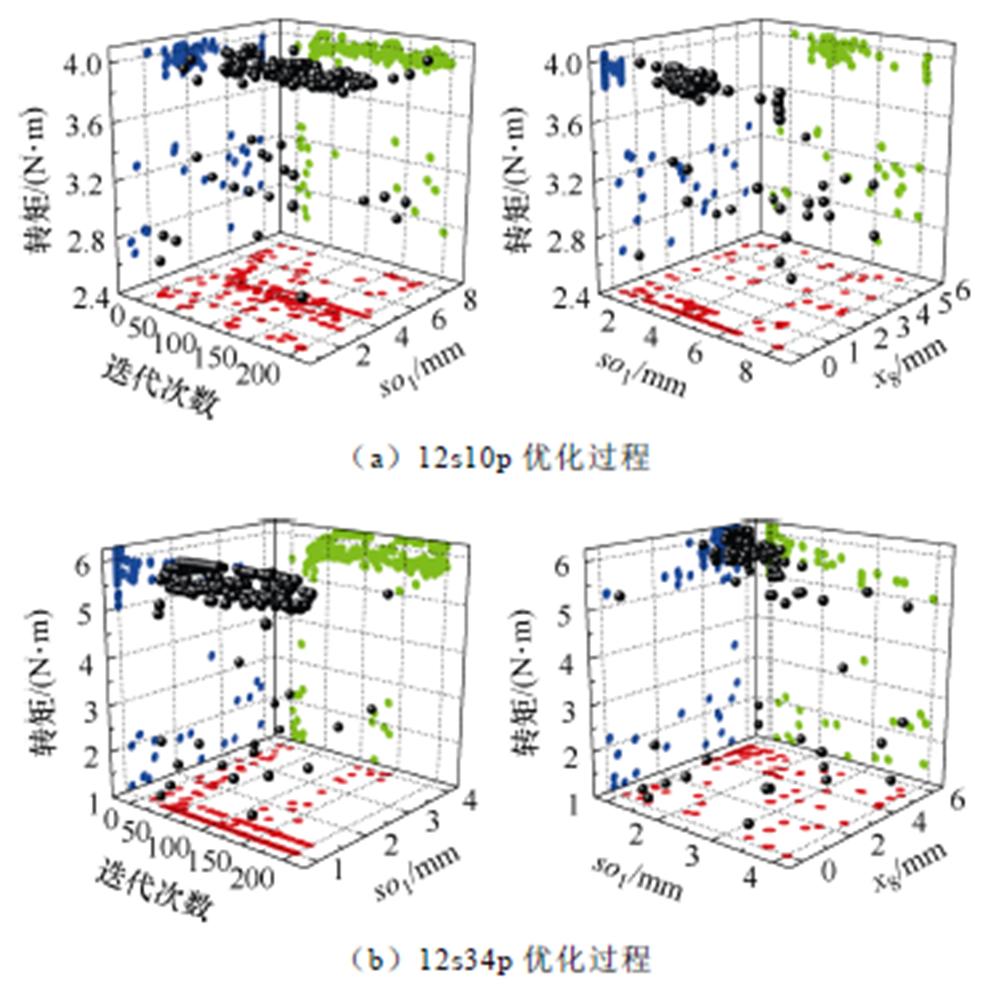
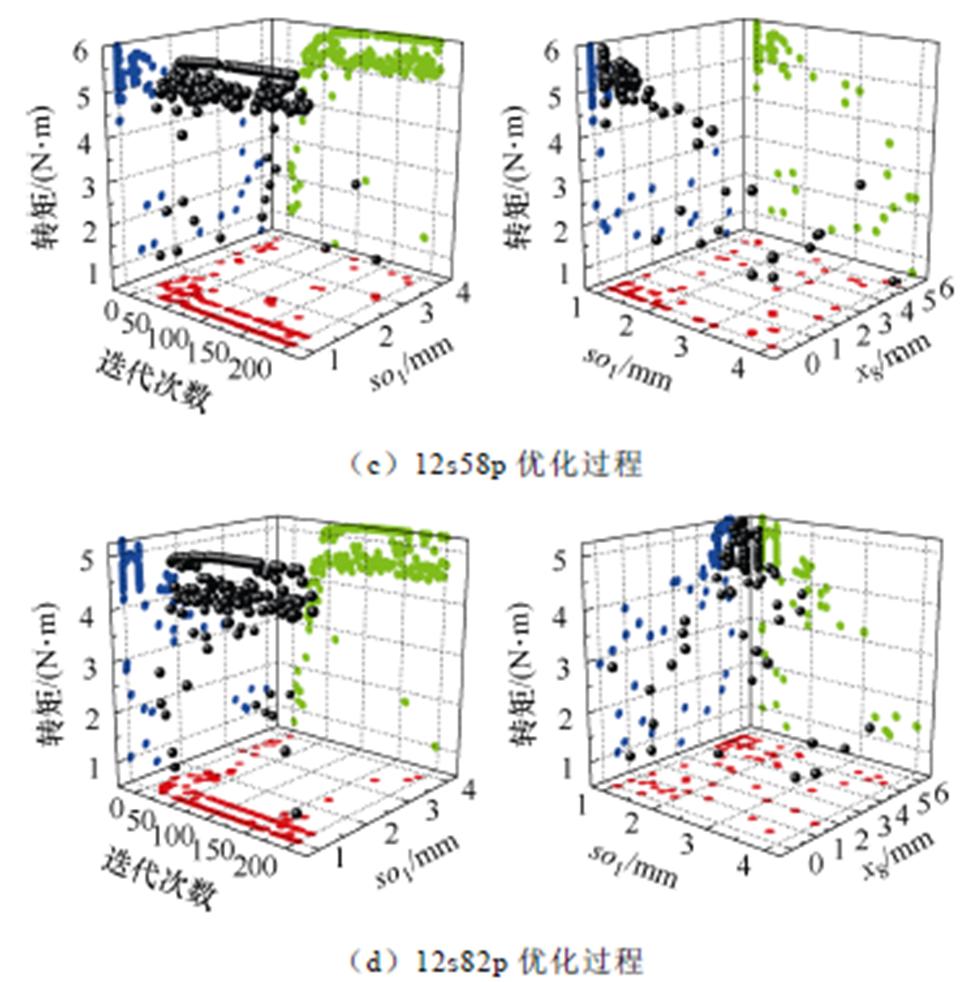
图4 四种结构优化过程
Fig.4 Four structural optimization processes
基于第1节所提方法,本文以12槽PMVM电机为例,分别设计了直齿、裂2齿、裂3齿、裂4齿的调制器,相对应的电机槽极组合分别为12s10p(调制比0.71)、12s34p(调制比2.43)、12s58p(调制比4.14)、12s82p(调制比5.86)。电机结构基础几何参数见表1。
表1 基础几何参数
Tab.1 Basic geometric parameters (单位: mm)

参 数数 值 定子外径122.00 定子轭宽4.00 定子齿宽8.00 单边气隙长度0.60 转子外径42.00 永磁体厚度3.50 铁心长度30.00
基于表1的参数建立了四种电机模型,并采用多自由度调制器设计方法分别设计了磁场调制器,图5为四种结构调制器设计优化结果。可以看出,12s10p是直齿结构,这是由于该槽极配合下裂齿会对转矩产生不利影响。同理,12s34p裂2个齿,12s58p裂3个齿,12s82p裂4个齿,这与预期结果一致。此外,发现四种结构的槽口都属于倒梯形结构,倒梯形的下底参与磁导函数的设计,增强输出转矩,上底则是用于抑制槽口漏磁,减小槽口漏磁对转矩提升的影响。接下来分析了四种结构的气隙磁导、空载以及负载电磁性能。
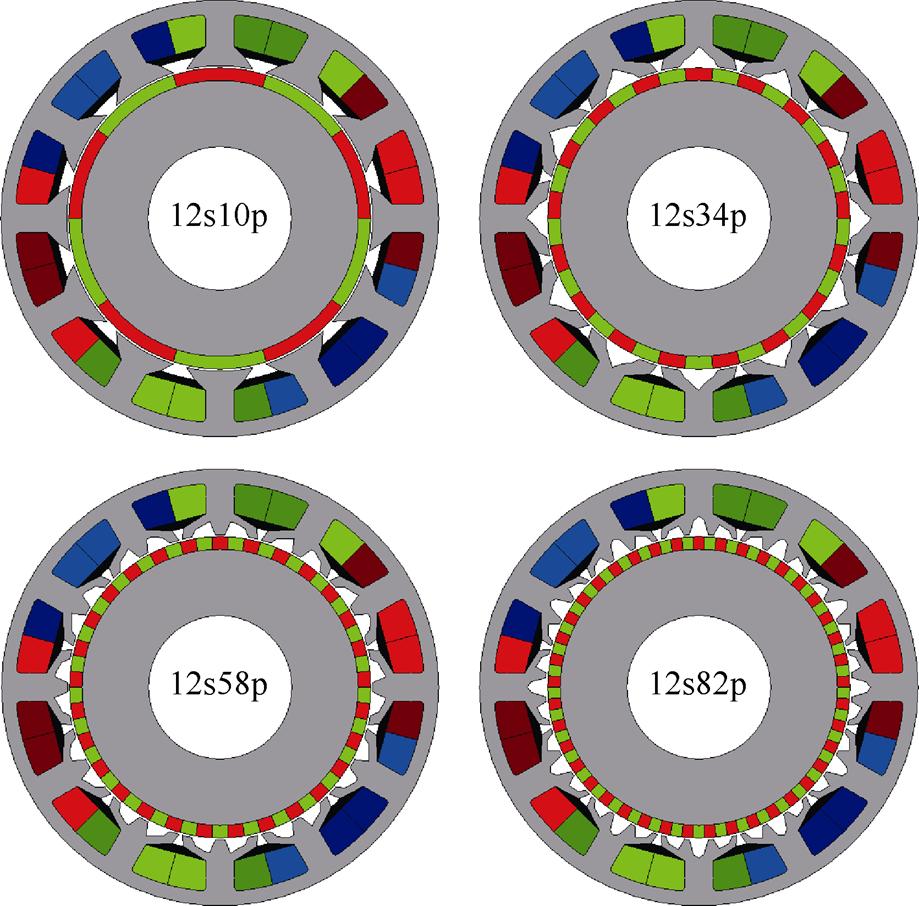
图5 调制器设计优化结果
Fig.5 Modulator design optimization results
永磁游标电机磁场调制器设计的核心在于改变磁导函数。在空载状态下,通过有限元计算不开槽与开槽时的气隙磁通密度,并将二者相除得到相对气隙磁导。分析一个机械周期内四种结构的相对磁导函数分布,如图6所示。12s10p结构在一个机械周期内磁导函数仅变化一次,因其仅有一个裂口;12s34p结构磁导函数在一个机械周期内发生两次突变,因有两个裂口,其余两种结构的磁导变化也符合其结构规律。
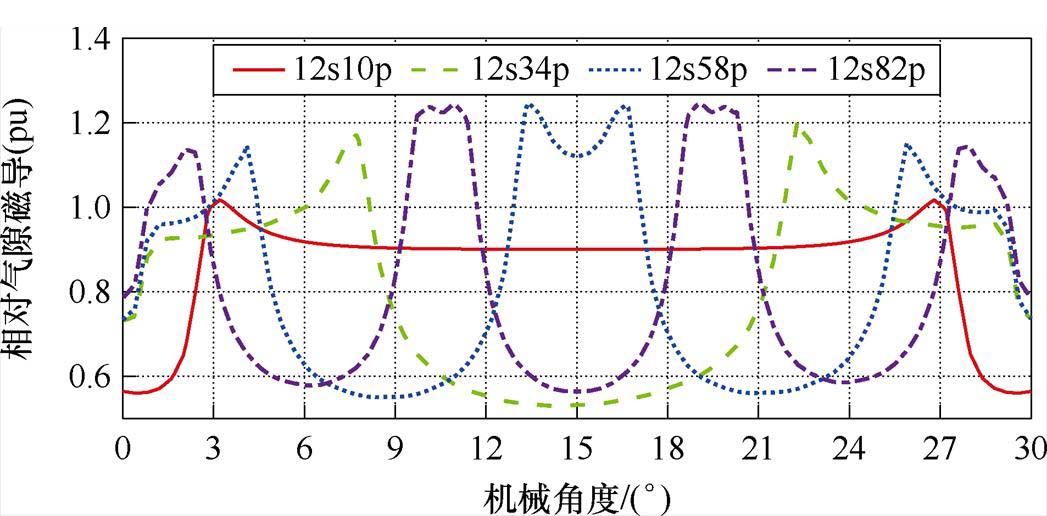
图6 相对气隙磁导
Fig.6 Relative airgap permeance
磁导函数的突变会引入磁导谐波,图7为磁导函数的快速傅里叶变换(Fast Fourier Transform, FFT)结果。其中,12s10p结构的磁导直流分量最大,且含有少量由开槽效应引起的谐波分量。12s34p结构的谐波含量以1次谐波为主,12s58p结构以2次谐波为主,12s82p结构以3次谐波为主,这主要是由于较大的齿裂口与较小的槽裂口所导致的。
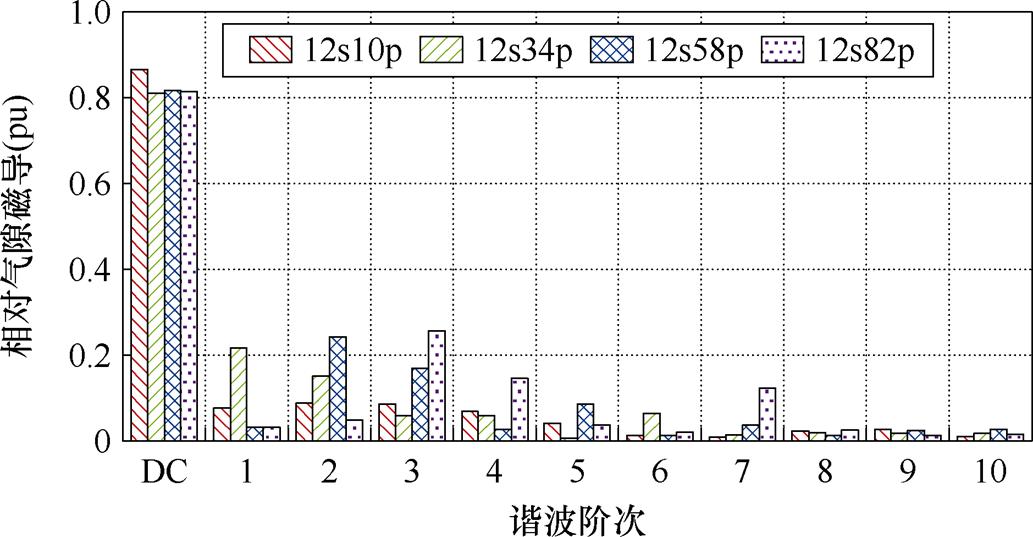
图7 相对气隙磁导FFT结果
Fig.7 FFT results for relative airgap permeance
永磁磁动势与气隙磁导相互作用,在气隙内产生磁场。图8为四种结构的空载气隙磁通密度,均出现明显畸变,这是由电机的开槽与裂齿引起的。
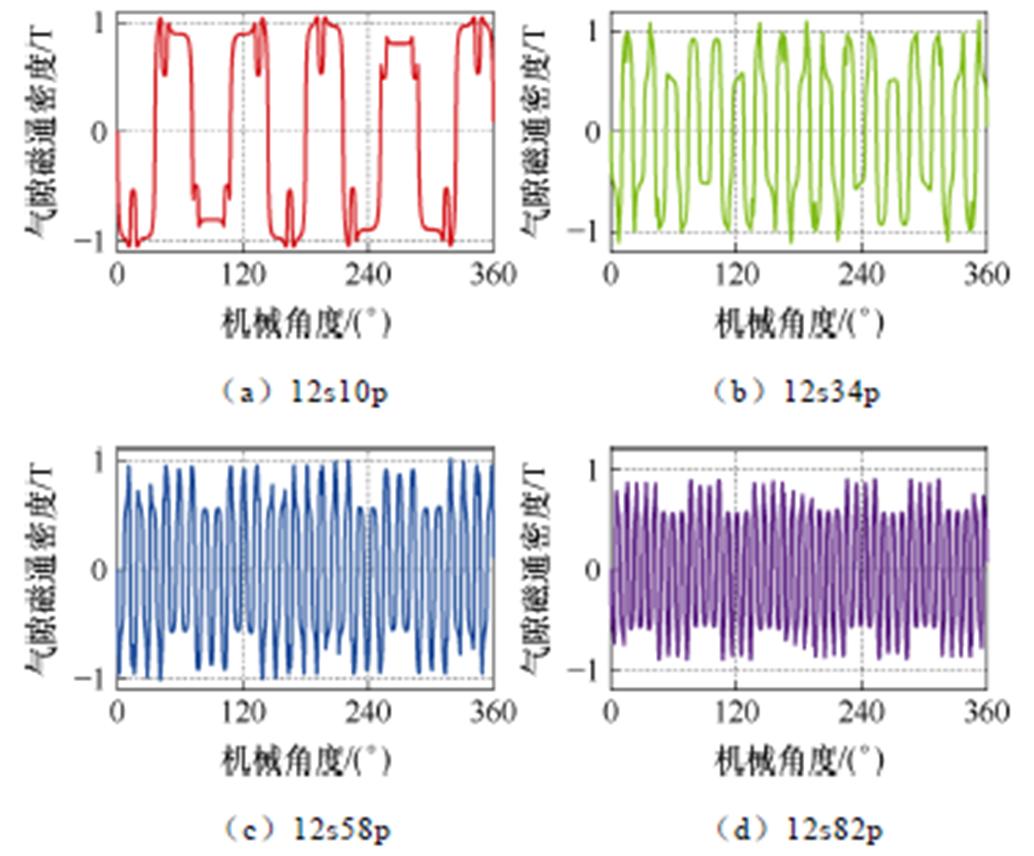
图8 空载气隙磁通密度
Fig.8 No-load air gap magnetic density
进一步对电机气隙磁通密度进行FFT分析,为了便于分析,仅提取了工作谐波的磁通密度幅值,如图9所示。由于漏磁的影响,电机磁通密度基波随着转子极对数的增加逐渐降低,这会对电机的电磁性能产生不利影响。随后,计算了四种结构的空载反电动势方均根有效值(Root Mean Square, RMS),结果如图10所示。其中,12s34p结构的反电动势最大,而12s10p结构的反电动势最小。12s10p反电动势最小的原因在于其磁场调制比极低,与常规永磁电机相近。尽管12s58p和12s82p的调制比高于12s34p,但它们的转子极对数较多,导致漏磁增加,反而对电磁性能产生了负面影响。
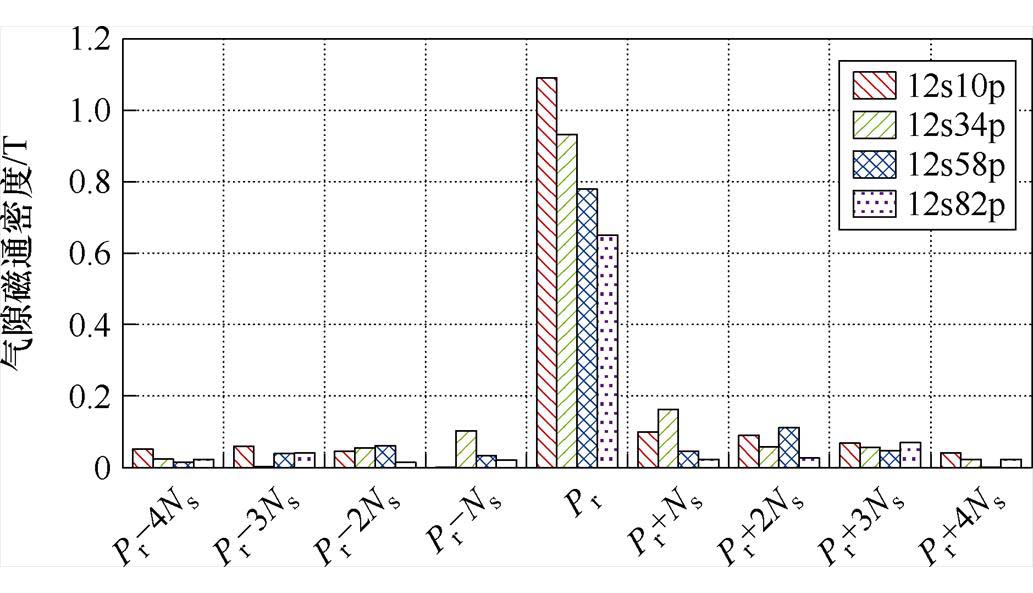
图9 空载气隙磁通密度FFT结果
Fig.9 FFT results for no-load air gap magnetic density
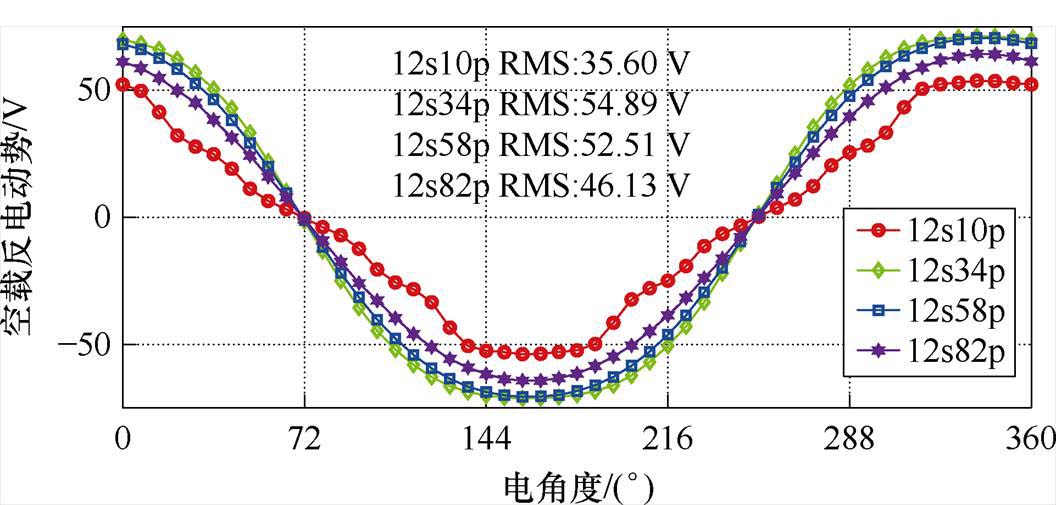
图10 四种结构空载反电动势
Fig.10 Four types of structure no-load back electromotive force
转矩作为PMVM的核心指标,其直接关系到电机性能的优劣。因此,对四种结构的转矩进行分析。图11为四种结构在相电流有效值为6 A时的转矩平均值(Average, AVG)。可以看到,12s34p的转矩最大,12s10p的转矩最小,这与反电动势变化规律一致。
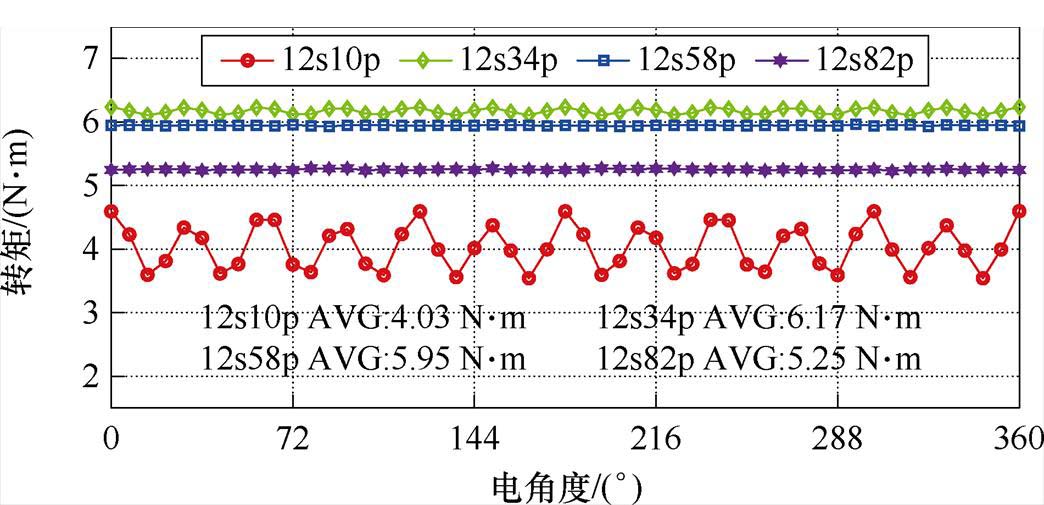
图11 四种结构转矩
Fig.11 Four types of structure torques
随后绘制了四种结构的转矩电流曲线,如图12所示。结果显示,12s10p结构的线性度最佳,12s34p次之,12s82p最差。这是因为裂齿数量增加使电机调制出更多谐波,导致定子铁心易饱和,不利于过载设计。
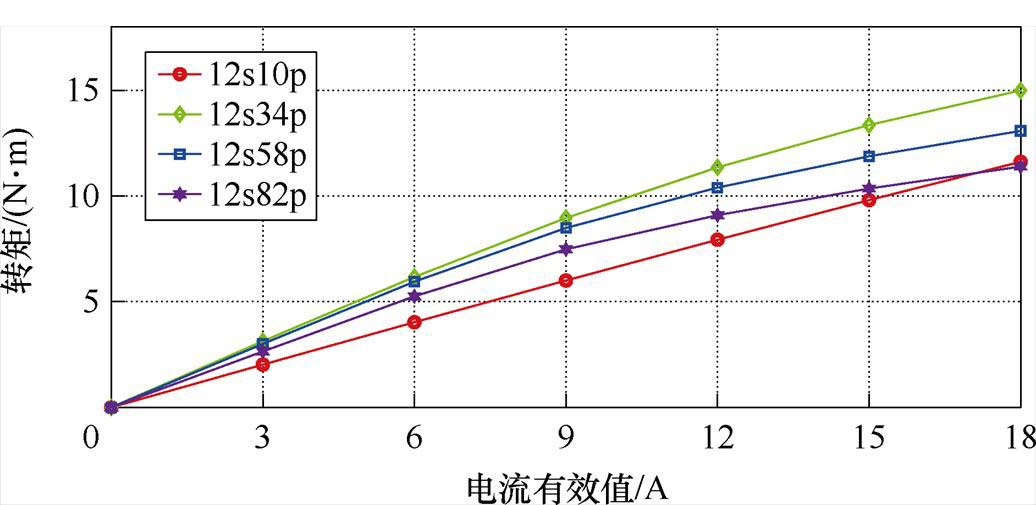
图12 四种结构转矩电流曲线
Fig.12 Four types of structural torque current curves
综上所述,多自由度调制器可满足广泛的裂齿结构设计需求,突破了传统固定齿形结构的限制,适用于任意开槽需求的PMVM。同时,在设计PMVM时,槽极组合的选择至关重要。虽然高调制比能增强磁场调制性能,但转子极对数过高会增加漏磁。因此,PMVM的调制比与最大输出转矩之间存在权衡。
第2节已深入探讨了多自由度磁场调制器设计的优势。然而,调制因子数量增加会使电机优化的输入参数增多,进而降低优化速率;反之,调制因子数量过少则会使因子间距过大,导致结构无法达到最优。为解决这一矛盾,本节提出等效裂齿结构。鉴于12s34p结构具有最优转矩性能,下文以此拓扑结构为例展开等效裂齿讨论。
观察第2节优化结果可知,12s34p裂齿呈三角形与梯形结合的结构。据此提出等效裂齿设计,将三角形与梯形结构相结合,如图13所示。该设计将齿部原有的15个自由度降至6个,大幅简化设计复杂度。通过优化梯形底部的两个调制因子Angle1、Angle2,可调节裂口大小;梯形上底的宽度由调制因子Angle1_1、Angle2_1控制,高度由调制因子y1控制,形成三角形下底;三角形顶点y2位于主齿轴线上,可调节三角形顶部高度,最终形成等效裂齿结构。
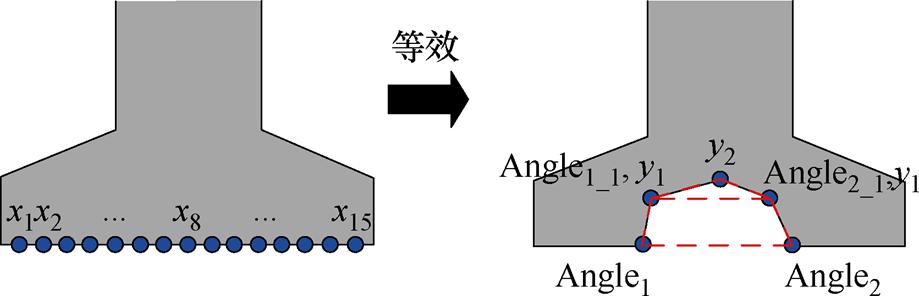
图13 裂齿等效形式
Fig.13 Equivalent shape of split teeth
图14为多自由度裂齿与等效裂齿的优化结果。等效裂齿结构呈现为三角形与梯形的叠加,优化结果与预期一致。
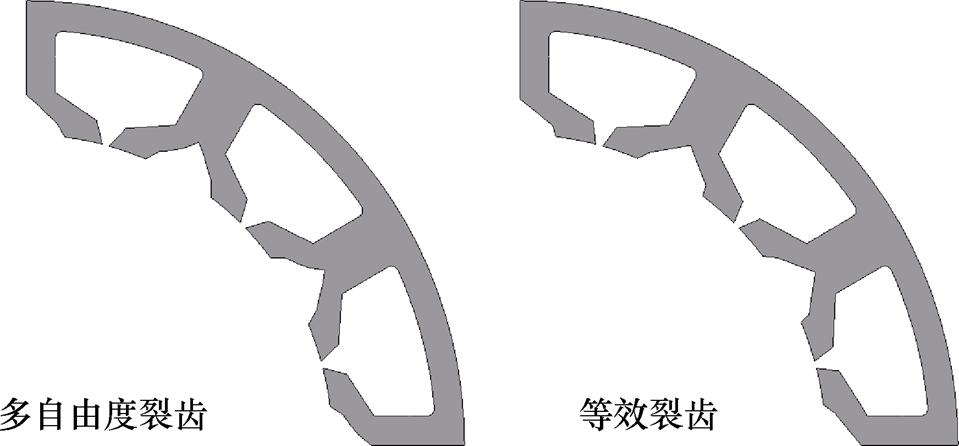
图14 优化结果
Fig.14 Optimization results
图15为等效裂齿与多自由度裂齿的转矩对比,二者转矩几乎一致。轻微差异源于等效裂齿的裂口调制因子变化连续,而多自由度裂口调制因子为离散变化,仅高度变化连续。因此,等效裂齿结构更适用于多自由度调制器设计,且其适用的槽数拓扑群更广泛。以6槽电机为例,电机齿部跨度较大,原结构齿部仅有的15个自由度难以充分表征裂齿形式,而等效裂齿能有效解决这一问题。但需注意,本文提出的等效形式仅适用于裂一个齿的磁场调制器优化,若需更多裂齿,则需重新构建等效裂齿。因篇幅所限,此处不再深入讨论。
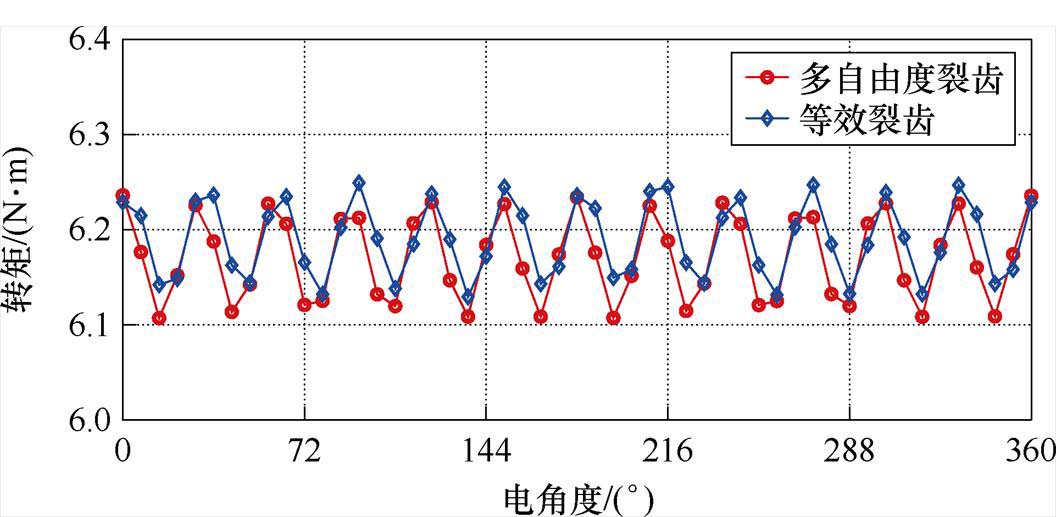
图15 转矩对比
Fig.15 Comparison of torque
电机作为工业产品,在优化过程中,不仅要优化磁场调制器,还需兼顾定子齿宽、定子轭宽、转子外径、永磁体厚度等关键几何参数,如图16所示。
同时,在追求最大输出转矩时,还需综合考虑转矩脉动、效率、过载能力等重要电磁性能。因此,本文对电机几何参数进行了全局优化,优化目标与约束见表2。表3给出了优化所得几何参数。表4给出了全局优化前后电磁性能的对比。
优化结果显示,效率提升且转矩脉动降低,表明优化效果良好。之后,为凸显等效裂齿的优势,选取常规均匀裂齿结构、多自由度优化裂齿结构作为对比基准,三者永磁体用量相同,槽面积相当,结构如图17所示。
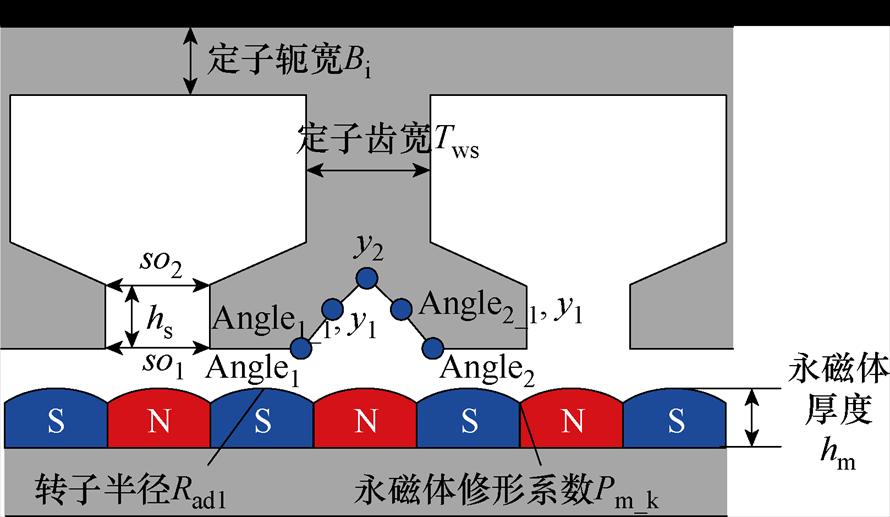
图16 关键几何参数
Fig.16 Key geometric parameters
表2 优化目标与约束
Tab.2 Optimization objectives and constraints
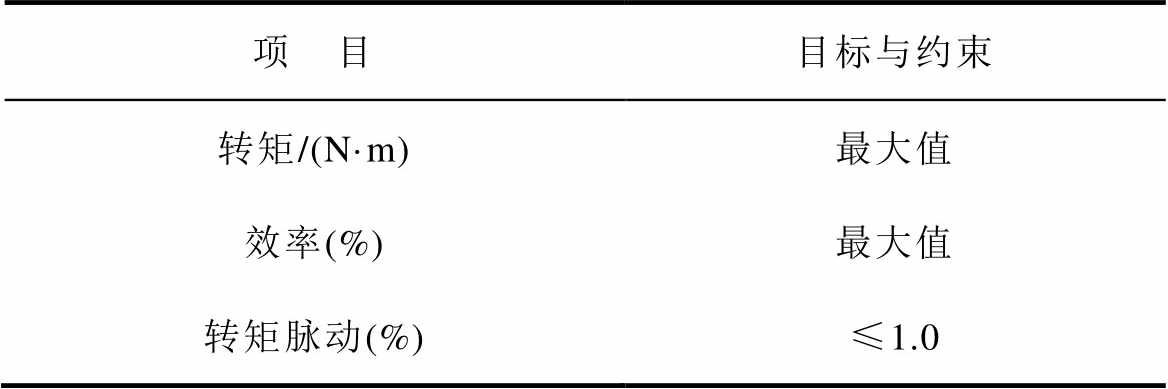
项 目目标与约束 转矩/(N·m)最大值 效率(%)最大值 转矩脉动(%)≤1.0
表3 参数全局优化结果
Tab.3 Global optimization results of parameters
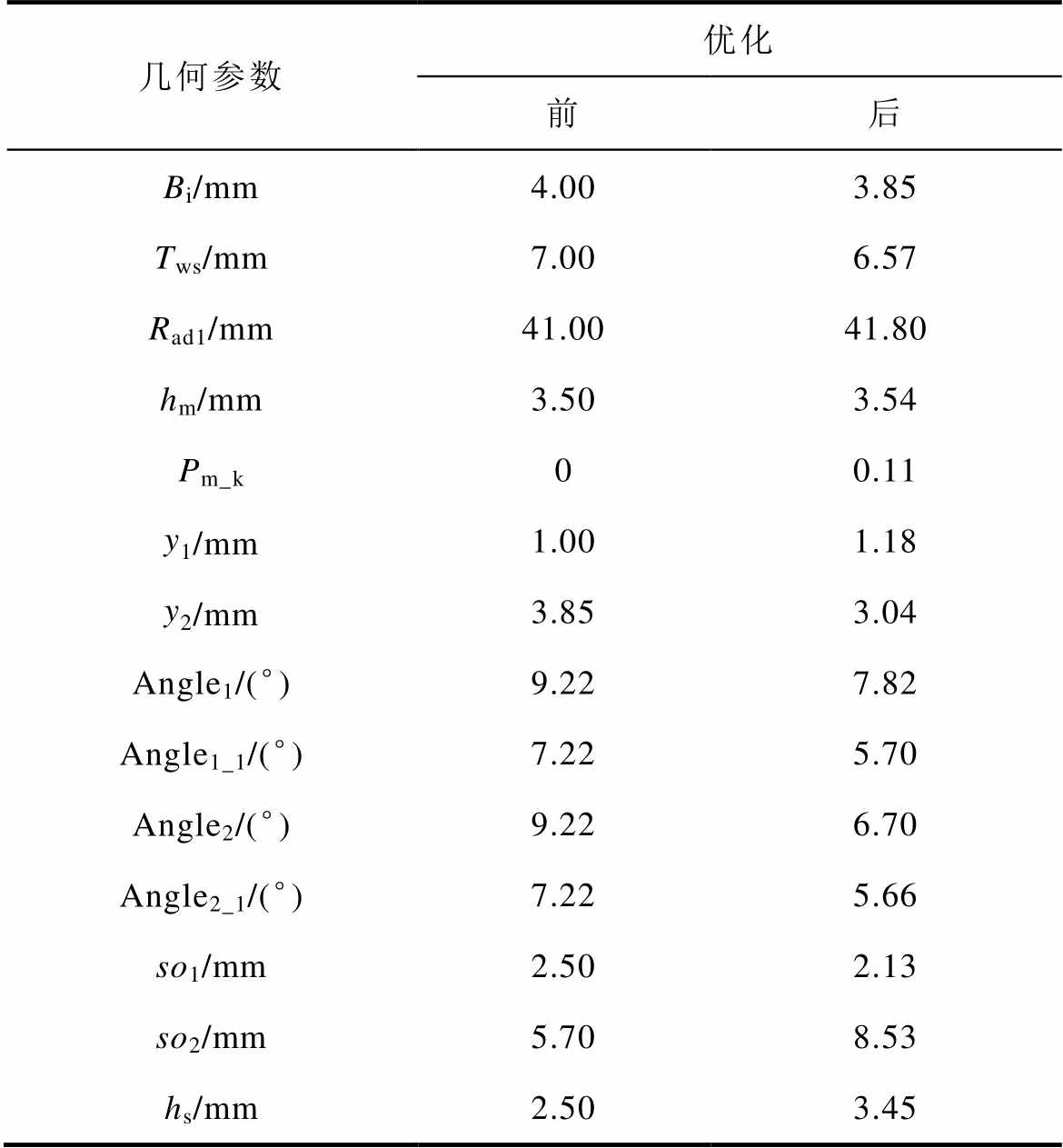
几何参数优化 前后 Bi/mm4.003.85 Tws/mm7.006.57 Rad1/mm41.0041.80 hm/mm3.503.54 Pm_k00.11 y1/mm1.001.18 y2/mm3.853.04 Angle1/(°)9.227.82 Angle1_1/(°)7.225.70 Angle2/(°)9.226.70 Angle2_1/(°)7.225.66 so1/mm2.502.13 so2/mm5.708.53 hs/mm2.503.45
表4 优化前后电磁性能对比
Tab.4 Comparison of electromagnetic performance before and after optimization

项 目优化前优化后 转矩/(N·m)5.465.46 效率(%)90.1691.05 转矩脉动(%)2.151.00
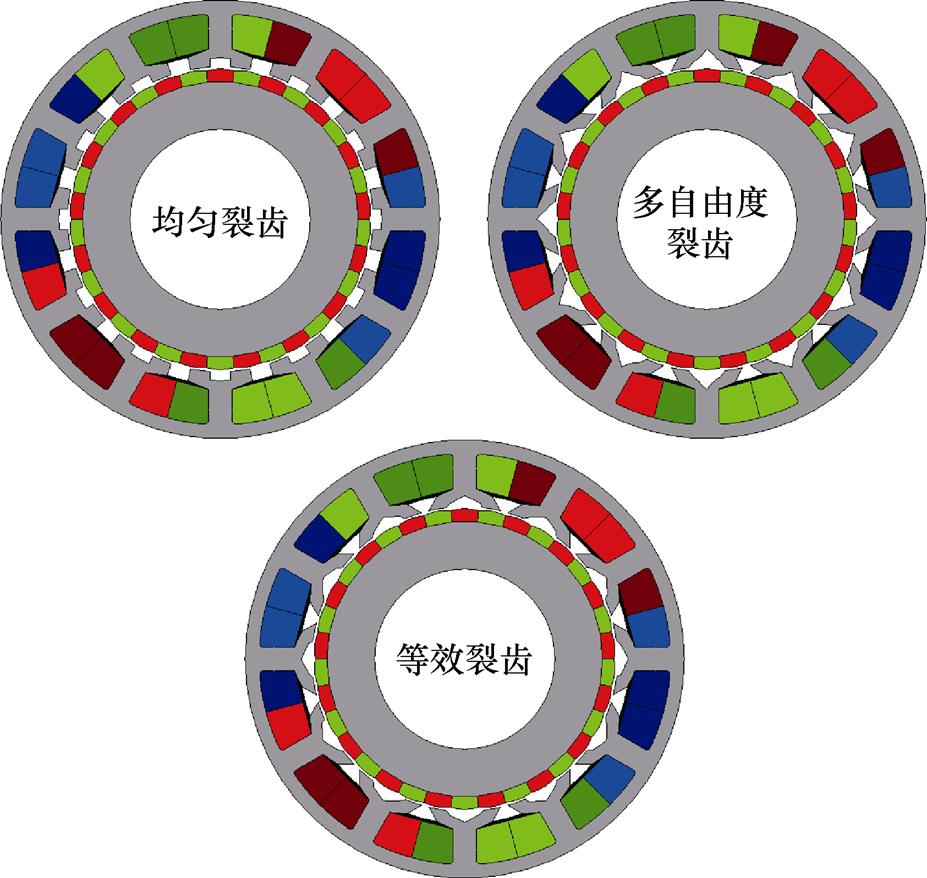
图17 三种结构
Fig.17 Three structures
计算了三种结构在1 500 r/min时的空载反电动势,结果如图18所示。均匀裂齿的反电动势有效值为35.37 V,多自由度裂齿为48.28 V,等效裂齿为48.24 V。多自由度裂齿与等效裂齿的反电动势特性相似,等效裂齿较均匀裂齿反电动势提高了36.39%。这源于等效裂齿可引入更多工作谐波,预计转矩也将呈现类似的增长趋势。
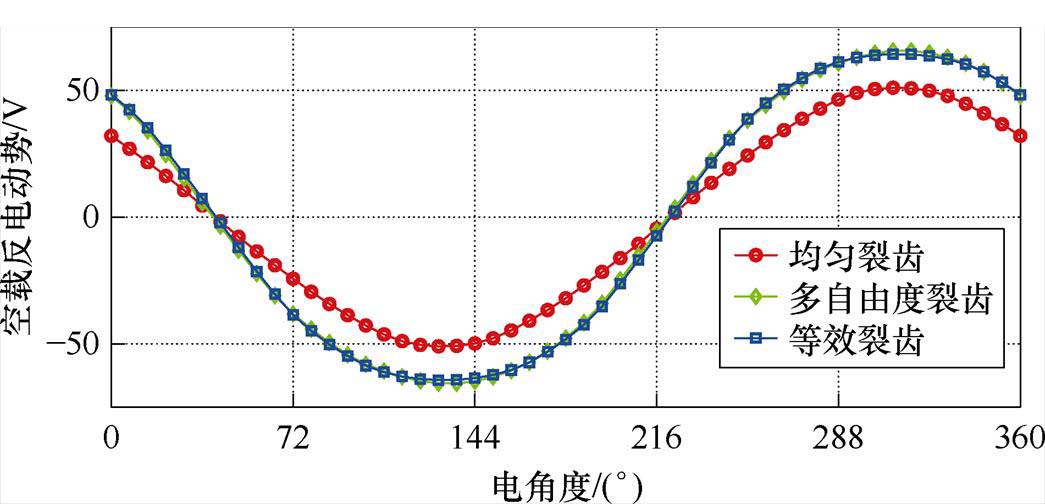
图18 三种结构空载反电动势
Fig.18 Three structures of no-load back electromotive force
图19为三种结构在6 A相电流有效值时的转矩。均匀裂齿的转矩为3.97 N·m,多自由度裂齿为5.45 N·m,等效裂齿为5.46 N·m。多自由度裂齿与等效裂齿的转矩高度相似,与反电动势变化结果一致。与均匀裂齿相比,等效裂齿的转矩提升了37.53%,凸显了本文所提方法的优越性。
分离计算了各阶次谐波转矩贡献见表5。可以看出,均匀裂齿的谐波转矩总和为3.94 N·m,多自由度裂齿谐波转矩总和为5.40 N·m,等效裂齿的谐波转矩总和为5.41 N·m,与有限元直接计算结果的吻合度达到了99%以上,这表明谐波转矩分离计算是正确的。此外,均匀裂齿的正向工作谐波仅有7、17次,而多自由度裂齿与等效裂齿的工作谐波有5、7、17、29次。因此,PMVM具有更高的转矩密度,分析结果也符合第1节的推论。
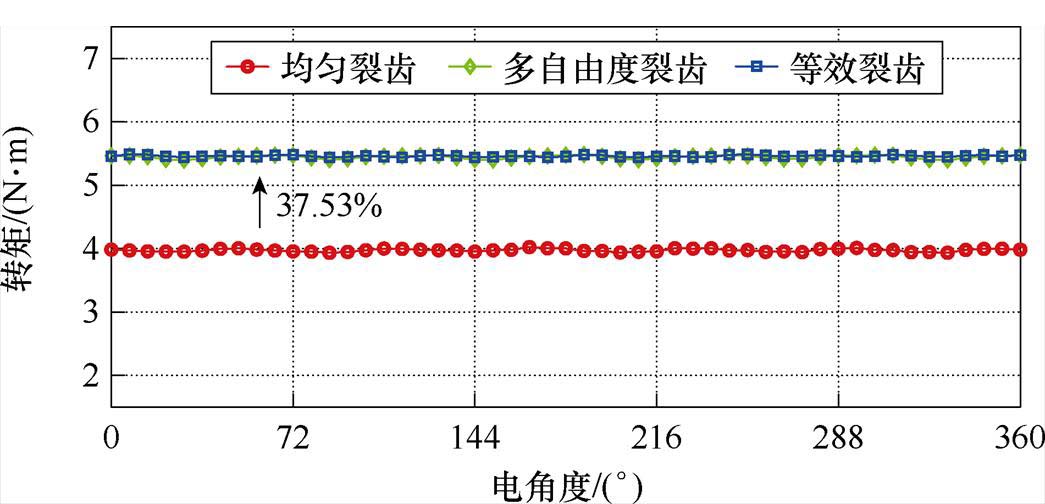
图19 三种结构转矩
Fig.19 Three types of structural torques
表5 三种结构谐波转矩
Tab.5 Three types of structural harmonic torques (单位: N·m)
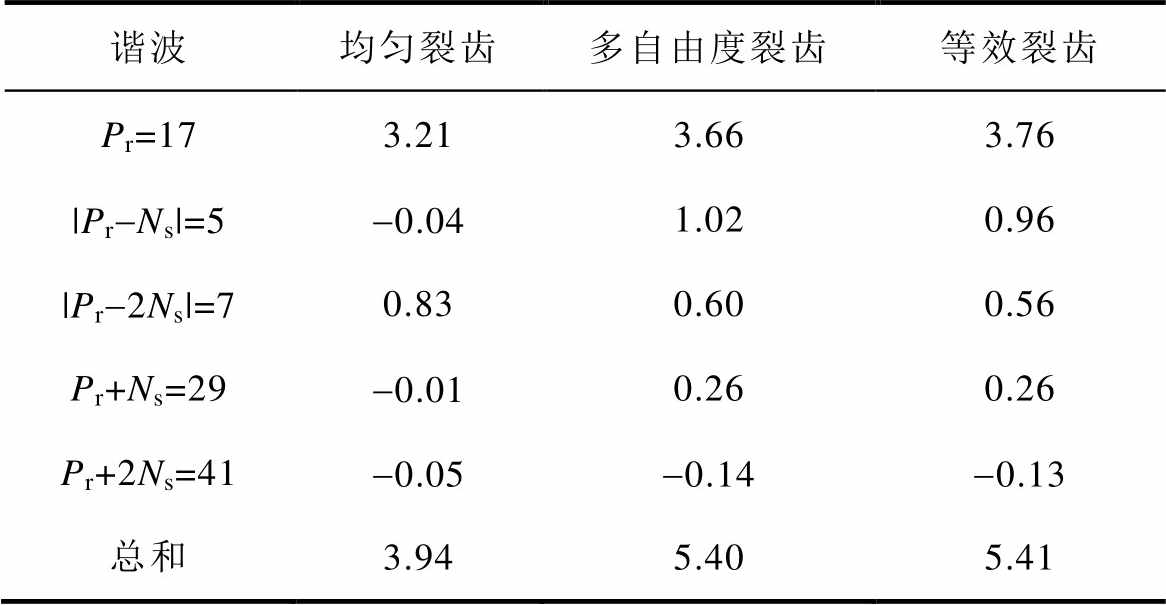
谐波均匀裂齿多自由度裂齿等效裂齿 Pr=173.213.663.76 |Pr-Ns|=5-0.041.020.96 |Pr-2Ns|=70.830.600.56 Pr+Ns=29-0.010.260.26 Pr+2Ns=41-0.05-0.14-0.13 总和3.945.405.41
图20为三种结构的转矩电流曲线。曲线显示三者的线性度良好,表明三种结构均具备良好的过载性能,这一特性可以通过检查三种结构的磁通密度分布加以验证。
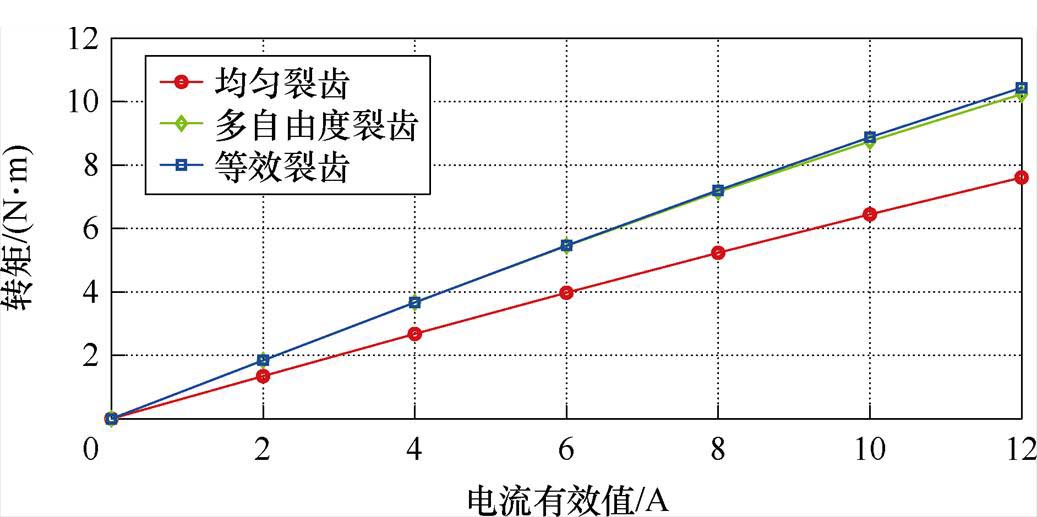
图20 三种结构的转矩电流曲线
Fig.20 Three types of structural torque current curves
图21为三种结构在相电流6 A时的磁通密度分布。结果显示,定子齿部与轭部均未出现磁通密度严重饱和现象,这为电机的优良过载性能奠定了基础。
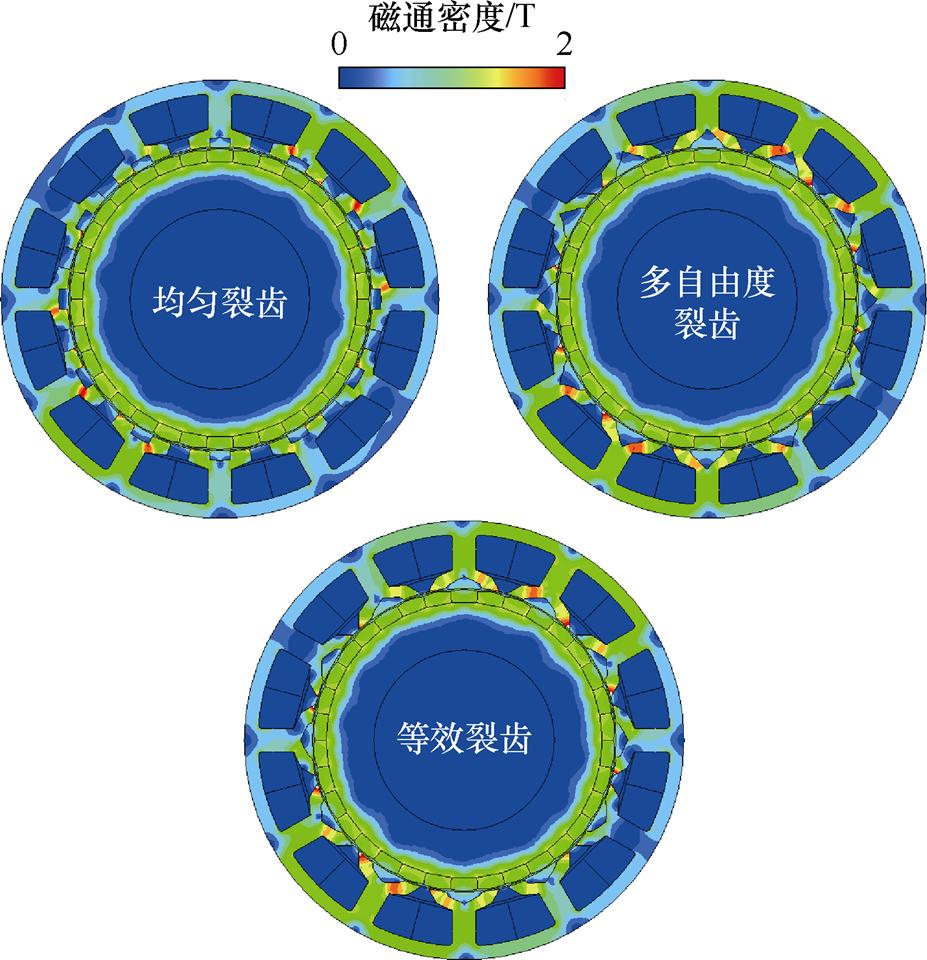
图21 三种结构磁通密度分布
Fig.21 Three types of magnetic density distributions
上述分析表明,等效裂齿在降低优化自由度的同时,保持了与多自由度裂齿高度相似的电磁性能,验证了齿部等效方法的有效性。此外,与均匀裂齿相比,所提结构显著增强了电机的转矩输出性能。
为验证上述分析的正确性,依据表3的结构参数加工了一台样机并进行了实验测试。定子采用计算机数控线切割加工,样机的定子、转子、转轴等如图22所示。
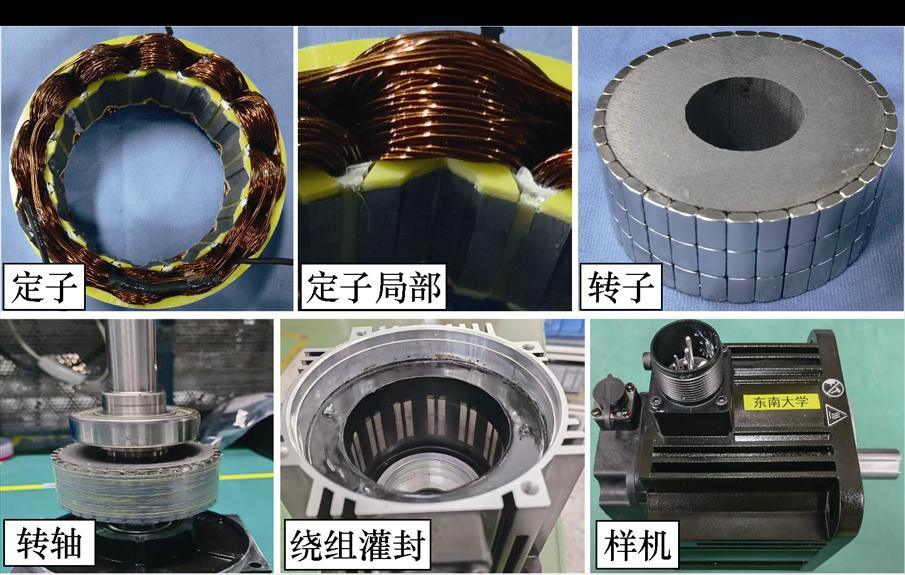
图22 零件和样机
Fig.22 Parts and prototypes
图23为负载实验测试平台,样机与测功机直接相连,由埃斯顿控制器控制,可调节电机转速与负载电流。测功机吸收负载能量,并将转矩与效率反馈至上位机显示。本文测试了电机的空载反电动势、电流、转矩及效率。
首先测试了电机在1 000 r/min时的线空载反电动势,如图24所示。测试结果表明,电机的线反电动势有效值为58.00 V,而有限元计算结果为55.67 V,二者误差在5%以内,实验结果与预期相符。
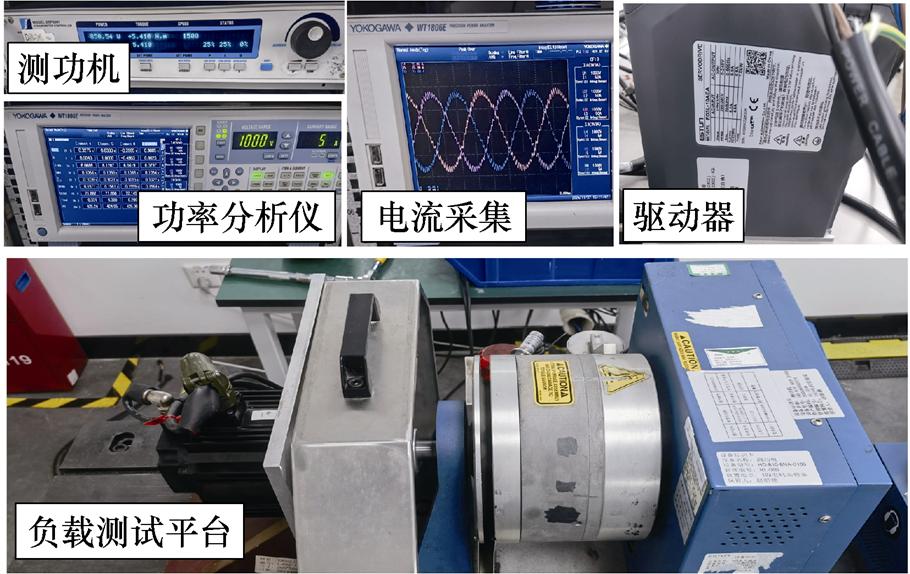
图23 实验测试平台
Fig.23 Experimental testing platform
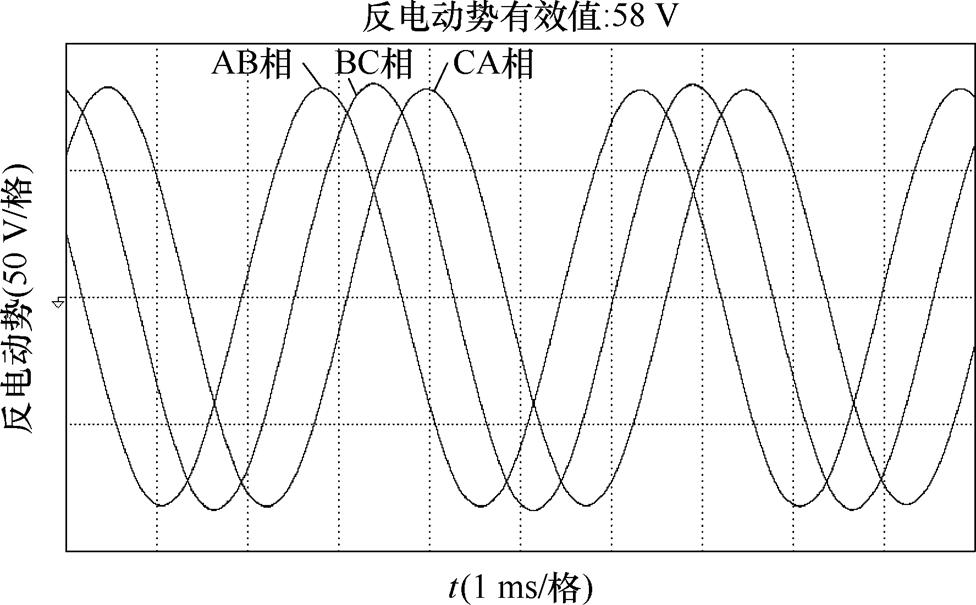
图24 1 000 r/min线反电动势
Fig.24 1 000 r/min line back electromotive force
然后,通过控制器向电机绕组注入励磁电流,不同额定值的电流可产生不同转矩。图25为三相额定电流,相电流有效值为6 A,电流波形对称性良好,表明电机控制效果良好。
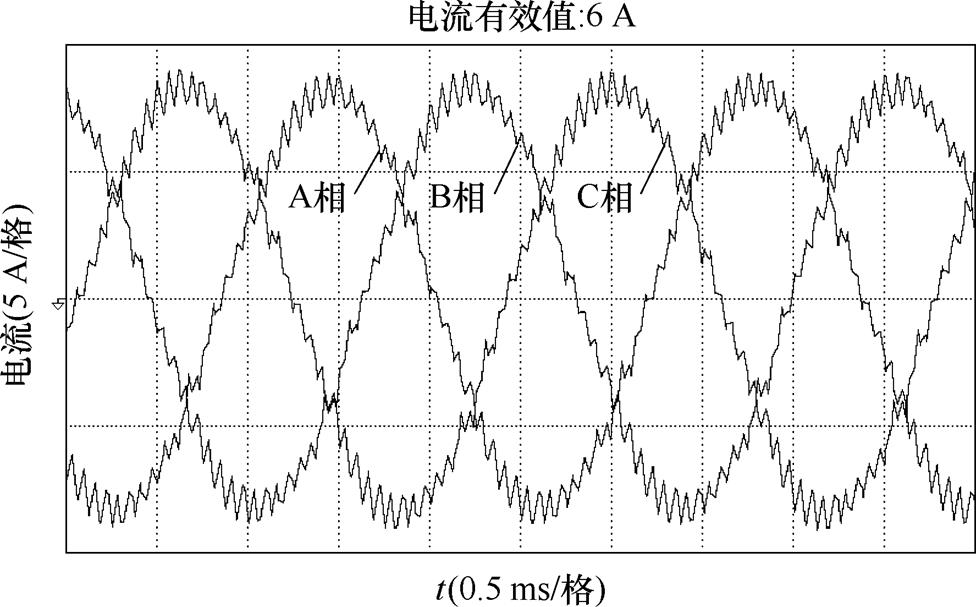
图25 三相额定电流
Fig.25 Three phase rated current
图26为电机的实验测试转矩电流曲线。结果显示,在不同负载电流下,测试转矩与有限元计算转矩高度一致,符合预期。
图27为电机的效率电流曲线。结果显示,在低载工况下,实验测试效率与有限元计算结果差异较大,这是由于有限元软件计算效率时,仅考虑了铜耗、铁耗和永磁体涡流损耗,未计入轴承损耗、风摩损耗及机械摩擦等损耗。在低载工况下,如2 A时,这些未考虑的损耗在总损耗中占比较高,导致实验测试的效率偏低。随着负载增加,铜耗、铁耗和永磁体涡流损耗显著增大,有效降低了未考虑损耗的占比,从而使有限元计算损耗与实验测试损耗逐渐趋于一致。
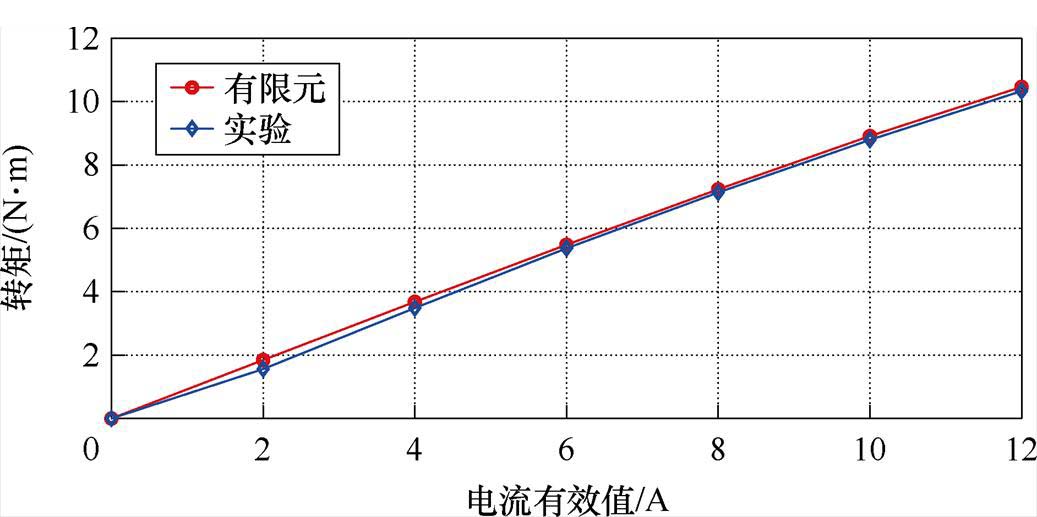
图26 实验测试转矩电流曲线
Fig.26 Experimental testing torque current curves
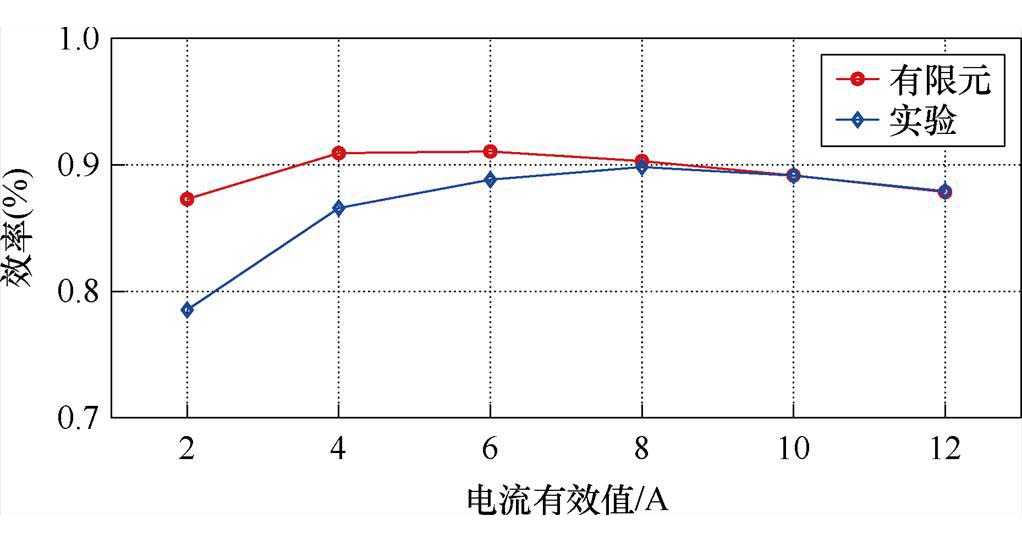
图27 实验测试效率
Fig.27 Experimental testing efficiency
本文创新性地提出了一种多自由度磁场调制器设计方法,以增强PMVM的转矩性能,并基于该方法设计了不同调制比的PMVM。经过深入分析,得出以下结论:
1)调制比的增高虽能增强电机的磁场调制性能和输出转矩,但高调制比导致的高转子极对数会增大漏磁,不利于转矩提升,因此最大输出转矩与最佳磁场调制比之间存在权衡,需谨慎选择。
2)多自由度调制器设计突破了传统固定齿形调制器的设计局限,适用于更广泛的裂齿结构设计,具有普适性。与传统均匀裂齿结构相比,多自由度设计的裂齿可实现电机转矩提升37.53%。
3)提出的三角形与梯形相结合的等效裂齿结构,不仅可替代原有的多自由度齿结构,还能在降低优化自由度的同时,扩大其适用的槽数拓扑群。
最后,制作了样机并进行了实验测试,实验结果与预期高度一致。该方法为PMVM磁场调制器设计提供了新的参考。
参考文献
[1] Xu Liang, Li Yang, Zhao Wenxiang, et al. Reduction of unipolar leakage flux and torque ripple in consequent-pole PM vernier machine[J]. CES Transa- ctions on Electrical Machines and Systems, 2023, 7(1): 35-44.
[2] 林宝全, 李捷, 杨公德. 永磁游标电机转矩特性研究[J]. 电气工程学报, 2023, 18(4): 35-42.
Lin Baoquan, Li Jie, Yang Gongde. Research of torque characteristics of permanent magnet vernier machine[J]. Journal of Electrical Engineering, 2023, 18(4): 35-42.
[3] Zhou Huawei, Tao Weiguo, Chen Cheng, et al. Analysis and comparison of even-order back EMF harmonics of fractional-slot concentrated-winding consequent pole permanent magnet vernier machines[J]. IEEE Transactions on Transportation Electrification, 2023, 10(1): 1969-1981.
[4] 樊英, 陈秋蒴, 陈俊磊, 等. 基于无人配送车辆运行工况的交替极游标轮毂电机优化设计[J]. 电工技术学报, 2023, 38(19): 5141-5151.
Fan Ying, Chen Qiushuo, Chen Junlei, et al. Opti- mization design of consequent pole vernier wheel motor based on operating conditions of unmanned delivery vehicles[J]. Transactions of China Electro- technical Society, 2023, 38(19): 5141-5151.
[5] 周健荣, 樊德阳, 项子旋, 等. V型游标永磁电机功率因数内在机理及其提升方法[J]. 电工技术学报, 2023, 38(14): 3789-3799.
Zhou Jianrong, Fan Deyang, Xiang Zixuan, et al. Production mechanism of power factor of V-type vernier permanent magnet machine and improvement method[J]. Transactions of China Electrotechnical Society, 2023, 38(14): 3789-3799.
[6] Zhu Yan, Liu Guohai, Xu Liang, et al. A hybrid analytical model for permanent magnet vernier machines considering saturation effect[J]. IEEE Transactions on Industrial Electronics, 2021, 69(2): 1211-1223.
[7] 程明, 文宏辉, 花为, 等. 电机气隙磁场调制统一理论及其典型应用[J]. 中国电机工程学报, 2021, 41(24): 8261-8283.
Cheng Ming, Wen Honghui, Hua Wei, et al. General airgap field modulation theory for electrical machines and its typical applications[J]. Proceedings of the CSEE, 2021, 41(24): 8261-8283.
[8] 李亚, 周庆林, 丁石川, 等. 表嵌式交替极永磁电机拓扑演化及气隙磁场调制效应研究[J]. 电工技术学报, 2023, 38(12): 3188-3198.
Li Ya, Zhou Qinglin, Ding Shichuan, et al. Investi- gation of topologies evolution and air-gap field modulation effect on surface-inset consequent-pole PM machines[J]. Transactions of China Electrotech- nical Society, 2023, 38(12): 3188-3198.
[9] 文宏辉. 电机气隙磁场调制统一理论及应用方法研究[D]. 南京: 东南大学, 2021.
Wen Honghui. Research on the general airgap field modulation theory for electrical machines and its application methods[D]. Nanjing: Southeast University, 2021.
[10] Ishizaki A, Tanaka T, Takasaki K, et al. Theory and optimum design of PM vernier motor[C]//1995 Seventh International Conference on Electrical Machines and Drives, Durham, UK, 1995: 208-212.
[11] He Zhuofan, Xiao Feng, Du Yi, et al. Comparison of permanent magnet vernier motors with evenly and unevenly distributed modulation teeth[J]. IEEE Transactions on Magnetics, 2023, 59(11): 8203005.
[12] Fang Li, Li Dawei, Ren Xiang, et al. A quantitative air-gap construction method to maximize torque of vernier PM machines[J]. IEEE Transactions on Transportation Electrification, 2023, 9(1): 463-473.
[13] 王秀平, 姜胜龙, 曲春雨. 新型Halbach阵列永磁游标电机结构优化设计[J]. 电机与控制学报, 2023, 27(4): 140-147.
Wang Xiuping, Jiang Shenglong, Qu Chunyu. Structural optimization design of Halbach array permanent magnet cursor motor[J]. Electric Machines and Control, 2023, 27(4): 140-147.
[14] Yu Yanlei, Pei Yulong, Chai Feng. Power factor analysis in spoke-type permanent magnet vernier motors with different slot-pole combinations for in-wheel direct drive[J]. IEEE Transactions on Transportation Electrification, 2023, 9(1): 642-655.
[15] 鲍晓华, 刘佶炜, 孙跃, 等. 低速大转矩永磁直驱电机研究综述与展望[J]. 电工技术学报, 2019, 34(6): 1148-1160.
Bao Xiaohua, Liu Jiwei, Sun Yue, et al. Review and prospect of low-speed high-torque permanent magnet machines[J]. Transactions of China Electrotechnical Society, 2019, 34(6): 1148-1160.
[16] Li Huayang, Zhu Z Q, Liu Yue. Optimal number of flux modulation pole in vernier permanent magnet synchronous machines[J]. IEEE Transactions on Industry Applications, 2019, 55(6): 5747-5757.
[17] Yu Yanlei, Chai Feng, Pei Yulong, et al. Comparisons of torque performance in surface-mounted PM vernier machines with different stator tooth topologies[J]. IEEE Transactions on Industry Applications, 2019, 55(4): 3671-3684.
[18] 徐亮. 磁场调制式永磁容错电机的分析、设计与控制[D]. 镇江: 江苏大学, 2017.
Xu Liang. Analysis, design and control of flux- modulation permanent-magnet fault-tolerant motor[D]. Zhenjiang: Jiangsu University, 2017.
[19] Fang Li, Li Dawei, Ren Xiang, et al. A novel permanent magnet vernier machine with coding- shaped tooth[J]. IEEE Transactions on Industrial Electronics, 2022, 69(6): 6058-6068.
[20] 程明, 马钲洲, 花为, 等. 电机气隙磁场调制统一理论研究进展与展望[J]. 中国电机工程学报, 2025, 45(4): 1220-1237.
Cheng Ming, Ma Zhengzhou, Hua Wei, et al. Research progresses and prospects of general airgap field modulation theory for electrical machines[J]. Proceedings of the CSEE, 2025, 45(4): 1220-1237.
[21] Jiang Tingting, Zhao Wenxiang, Xu Liang. Analysis of split-tooth stator PM vernier machines with zero- sequence current excitation[J]. IEEE Transactions on Industrial Electronics, 2023, 70(2): 1229-1238.
[22] 贾宛英, 花玉梦, 王明杰, 等. 新型电励磁双凸极电机转子极数对电机性能影响[J]. 电工技术学报, 2025, 40(8): 2418-2429.
Jia Wanying, Hua Yumeng, Wang Mingjie, et al. Influence of rotor pole number on motor performance in novel doubly salient motor[J]. Transactions of China Electrotechnical Society, 2025, 40(8): 2418- 2429.
[23] 项子旋, 卢子润, 朱孝勇, 等. 轮辐式永磁轮毂电机高效轻质设计与优化研究[J]. 中国电机工程学报, 2021, 41(24): 8283-8295.
Xiang Zixuan, Lu Zirun, Zhu Xiaoyong, et al. High- efficiency and lightweight design and optimization of spoke-type permanent magnet in-wheel motor[J]. Proceedings of the CSEE, 2021, 41(24): 8283-8295.
[24] Du Kangkang, Xu Liang, Zhao Wenxiang, et al. Analysis and design of a fault-tolerant permanent magnet vernier machine with improved power factor[J]. IEEE Transactions on Industrial Electronics, 2022, 69(5): 4353-4363.
[25] Wu Zhaopeng, Quan Li, Xiang Zixuan, et al. Airgap- harmonic-oriented partitioned design method of PMV motor with improved torque performances[J]. CES Transactions on Electrical Machines and Systems, 2024, 8(1): 43-50.
[26] 陈威, 吴桂初, 方攸同. 基于绕组分布函数理论和动态磁网络的两种内置式永磁牵引电机解析建模方法[J]. 电工技术学报, 2020, 35(增刊2): 377-386.
Chen Wei, Wu Guichu, Fang Youtong. Two analytical models based on winding function theory and dynamic reluctance mesh for interior permanent magnet traction machines[J]. Transactions of China Electrotechnical Society, 2020, 35(S2): 377-386.
[27] 王柄东, 王道涵, 王晓姬, 等. 交流调磁型永磁同步电机磁通协同调控最大转矩铜耗比控制[J]. 电工技术学报, 2024, 39(12): 3630-3645.
Abstract The permanent magnet vernier machine (PMVM) is popular for its simple structure and high torque density. It can be modeled as three modules: the PM unit as the excitation source, the tooth-slot structure as the modulator, and the armature winding as the filter. The excitation source generates a magnetic electromotive force, and the modulator converts it into multiple magnetic field harmonics. The winding filter then extracts some of these harmonics to generate back electromotive force. The modulator design is crucial as it determines the magnetic field modulation capability and impacts the output torque. Traditional modulator designs with fixed tooth shapes and limited parameters cannot fully optimize permeance harmonics, limiting torque. Therefore, this paper proposes a multi-degree-of-freedom modulator design method to maximize torque.
Wang Bingdong, Wang Daohan, Wang Xiaoji, et al. A maximum torque per copper loss control for AC flux-regulation permanent magnet synchronous motor with magnetic flux co-regulation[J]. Transactions of China Electrotechnical Society, 2024, 39(12): 3630- 3645.
First, the stator is divided into Region Ⅰ and Region Ⅱ. Region Ⅰ is the part of the tooth slot structure near the stator yoke, which does not directly affect the distribution of airgap permeance. Region Ⅱ is the part of the tooth slot structure adjacent to the airgap, directly affecting the distribution of airgap permeance. Therefore, Region Ⅱ is the key to the design of stator magnetic field modulators. Then, decompose the stator slot into 3 modulation factors and the stator teeth into 15 modulation factors, which can be freely combined to form different modulator structures.
Then, the PMVM with different modulation ratios is designed. Although increasing the modulation ratio can enhance magnetic field modulation performance and torque, a higher number of rotor poles increases flux leakage. There is a trade-off between the maximum output torque and the optimal magnetic field modulation ratio. The modulation ratio should be carefully selected.
In addition, to further improve optimization efficiency, a modulation tooth structure with continuous modulation factors replaces the original discrete tooth structure. A continuous equivalent split tooth is formed by combining trapezoidal and triangular shapes. The bottom width of the trapezoid is controlled by angles Angle1 and Angle2, while the top width and height of the trapezoid are controlled by angles Angle1_1, Angle2_1, and y1, which also form the bottom of the triangle. The triangle's height is controlled by y2. This approach reduces the original 15 modulation factors to 6, enhancing optimization efficiency. The torques of equivalent split teeth and multi-degree-of-freedom split teeth are almost identical. The slight difference is due to the continuous variation of the split modulation factor of the equivalent split tooth. The multi-degree-of-freedom split modulation factor exhibits discrete variation, whereas the continuous height variation is continuous. Therefore, the equivalent split-tooth structure is more suitable for the design of multi-degree-of-freedom modulators and for applications across a broader range of slot-topology groups.
Finally, a 12s34p PMVM is designed using the proposed equivalent teeth. Compared with the conventional uniform split-tooth PMVM, its torque has increased by 37.53%. The prototype has been manufactured, and the experimental results are highly consistent with expectations. This method proposes a new approach to improving torque in PMVM.
Keywords:Permanent magnet vernier machine, magnetic field modulator design, working harmonics, multi degree of freedom design, torque
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.250407
国家自然科学基金(52277035)和江苏省双碳科技创新专项基金(BE2022032-1)资助项目。
收稿日期 2025-03-17
改稿日期 2025-04-14
王荣鑫 男,1996年生,博士研究生,研究方向为永磁电机设计与电磁性能分析。
E-mail: wangrongxin96@163.com
汪 波 男,1988年生,教授,博士生导师,研究方向为高性能永磁电机、容错电机驱动系统、高速起动/发电系统、磁悬浮电机驱动系统等。
E-mail: b.wang@seu.edu.cn(通信作者)
(编辑 崔文静)