 为滤波器电容,
为滤波器电容, 为滤波器电感,
为滤波器电感, 为电机定子电阻,
为电机定子电阻, 为电机定子电感。电流传感器测量逆变器输出端的三相电流。
为电机定子电感。电流传感器测量逆变器输出端的三相电流。摘要 加装LC滤波器的高速永磁同步电机会存在谐振问题,需要引入主动阻尼使系统稳定。基于滤波器的主动阻尼算法因结构及参数设计简单而得到广泛应用,但目前缺少选择、评估及设计滤波器主动阻尼的准则。该文针对逆变器侧电流反馈,提出一种用于评估滤波器主动阻尼谐振抑制性能的通用图解方法,进一步对比不同滤波器对谐振频率漂移的鲁棒性及稳定区域,从而得出滤波器主动阻尼对系统谐振现象的影响机理。其中,全通滤波器(APF)稳定区域最宽,且不影响系统幅频特性,被认为是最适用于逆变器侧电流反馈控制的主动阻尼滤波器。该文提出了基于APF相频特性重塑的谐振抑制方法,并依据离散域传递函数模型及稳定裕度指标,给出全速域下APF详细的参数设计方法及多参数鲁棒性分析。理论分析和实验结果表明,所提APF主动阻尼方法在不增加传感器数量的前提下,能够有效抑制LC滤波器带来的谐振问题,并具有良好的参数鲁棒性。
关键词:高速永磁同步电机 LC滤波器 谐振抑制 全通滤波器 单逆变器侧电流反馈
现代工业对高功率密度电机驱动系统的需求越来越高[1-3],使得高速永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)的应用备受关注[4-5]。由于高速PMSM的阻抗较小,脉宽调制(Pulse Width Modulation, PWM)引起的电流纹波较大,且运行在低载波比工况,所以其定子电流谐波较大。在逆变器输出端加装LC滤波器能够简便而有效地抑制这一不利影响[6]。但是,LC滤波器网络的引入会导致系统模型发生改变,使系统产生谐振现象,引起电机系统不稳定。
目前,针对LC滤波器引起的谐振问题,国内外学者主要围绕带LC滤波器的并网逆变器系统展开了广泛的研究[7],而对于带LC滤波器的永磁同步电机(LC-PMSM)系统研究较少[8]。谐振抑制方法可分为无源阻尼法和有源阻尼法。无源阻尼是指在LC滤波器电路中加入实体电阻,虽然可以有效地抑制谐振,但是会增大系统的有功功耗,降低逆变器效率;有源阻尼(主动阻尼)是指不加装实体电阻,通过改变控制系统的结构,实现与无源阻尼类似的效果[6]。主动阻尼法可以分为闭环极点配置 法[9]、虚拟电阻法[10-12]和滤波器主动阻尼法[13-15]。J. Kukkola等[9]设计了基于观测器的全状态反馈控制,通过配置闭环极点抑制LCL谐振,但观测器结构复杂,且电容电压观测器与反电动势观测器之间的耦合会影响系统的动态性能,故闭环极点配置法很难在高开关频率的系统中实现。
虚拟电阻法是一种应用广泛的谐振抑制方法,通过引入额外的反馈回路来取代实体电阻。文献[10-11]分析了电容电流反馈主动阻尼电流控制器的频率特性,给出了电流控制器谐振抑制参数设计方法。郑长明等[6]设计了基于滤波电容并联虚拟电阻的有源阻尼控制策略,给出了系统的闭环稳定性分析及参数设计准则。使用电容电流或电压反馈的虚拟电阻仍然需要在电容侧增加电流或电压传感器,这会增加硬件成本。因此,周佳新等[12]提出了电机侧电流反馈形式的虚拟电阻,不需要增加额外的电流传感器即可实现任意阻尼比的开环极点配置,但该控制框架需要设计的参数较多,结构复杂。
滤波器主动阻尼法主要通过调整开环传递函数的相频特性来实现谐振抑制。与虚拟电阻方法相比,滤波器主动阻尼法参数设计简单,便于实现。Yao Wenli等[13]综合分析了将陷波滤波器(Notch Filter, NF)分别应用于电网侧或逆变器侧电流反馈控制时,谐振抑制效果的有效性和局限性。Yang Ming等[14]提出了可变延迟时间来抑制LC滤波器引起的谐振问题,然而这种方法只能保证延迟的整数倍,极大地限制了滤波器主动阻尼的灵活性。Lü Zekai等[15]将NF应用于LC-PMSM以解决谐振问题,但未讨论采用逆变器侧电流反馈的情况。文献[16]仅简单将全通滤波器(All-Pass Filter, APF)应用于工业中常用的逆变器侧电流反馈的LCL并网逆变器系统,但未阐述具体原因,且并未展开详细的参数设计与讨论。相较于电机侧电流反馈,逆变器侧电流反馈的电流传感器可以集成到逆变器模块中,从而减少外部布线束量并简化信号硬件;此外,相同的传感器还可用于保护逆变器免受过电流的影响[17]。
综上所述,目前已有多种方法用于抑制带LC滤波器的电网或电机系统的谐振问题。其中,滤波器主动阻尼法因结构简单,在具有高PWM开关频率的电机系统中逐渐成为研究热点,但其在逆变器侧电流反馈中的应用有限,且多局限于静止坐标系,而高速PMSM的控制算法需要在dq坐标系下实现,谐振频率会随转速及其他参数变化产生较大范围的漂移;此外,缺乏简单直观的方法来评估和选择现有的滤波器主动阻尼。
为解决上述问题,本文首先针对逆变器侧电流反馈的LC-PMSM控制系统,提出了一种用于评估滤波器主动阻尼谐振抑制性能的通用图解方法,并比较了不同滤波器主动阻尼的鲁棒性效果,分析了滤波器主动阻尼对系统谐振现象的影响机理。依据图解分析,提出了一种基于APF相频特性重塑的谐振抑制方法。然后,在离散域下给出了APF参数设计方法,并进行了详细的参数鲁棒性分析。最后,通过40 kW的高速空压机台架实验验证了所提方法的有效性。
图1为带LC滤波器的表贴式PMSM电路拓扑,包括电压源型逆变器、LC滤波器、PMSM以及控制回路。图中,为滤波器电容,为滤波器电感,为电机定子电阻,为电机定子电感。电流传感器测量逆变器输出端的三相电流。
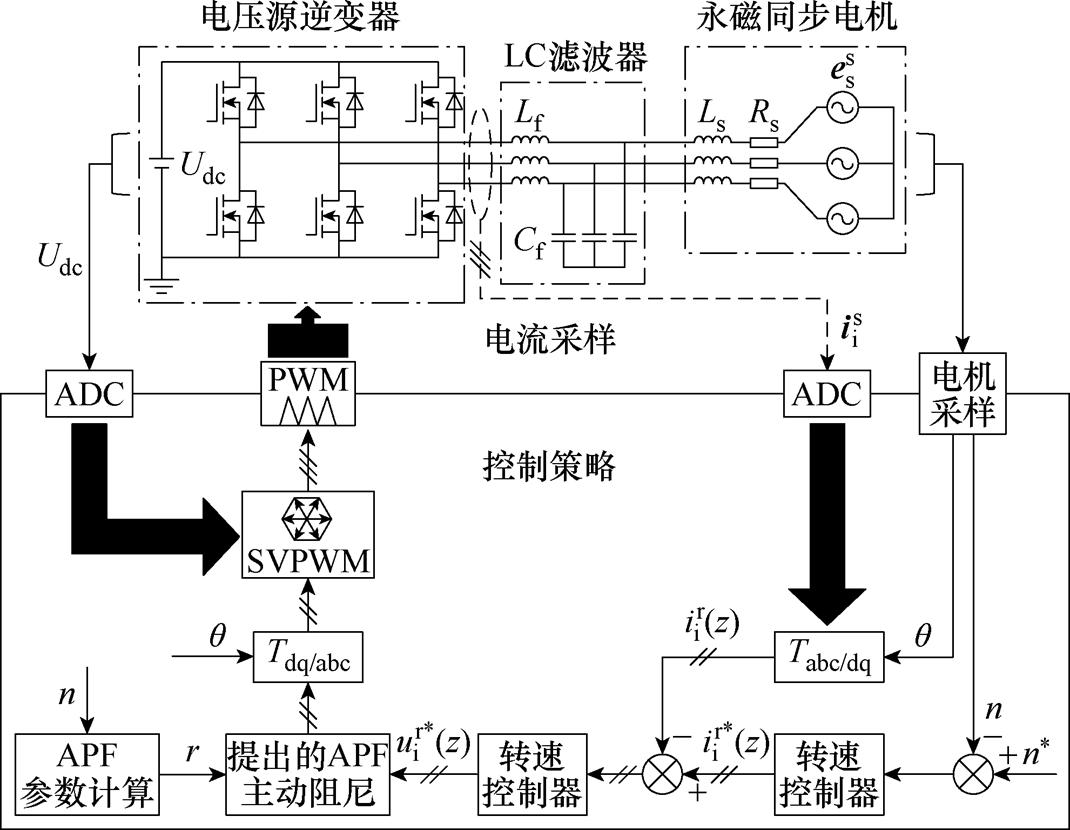
图1 LC-PMSM控制结构
Fig.1 Control structure diagram of LC-equipped PMSM
假设三相LC滤波电路、高速PMSM均为星形联结且三相完全对称,图2为LC-PMSM等效电路。图中, 、
、 、
、 、
、 、
、 分别为三相静止坐标系下逆变器侧电流、逆变器侧电压、电机侧电流、电机侧电压、反电动势。
分别为三相静止坐标系下逆变器侧电流、逆变器侧电压、电机侧电流、电机侧电压、反电动势。
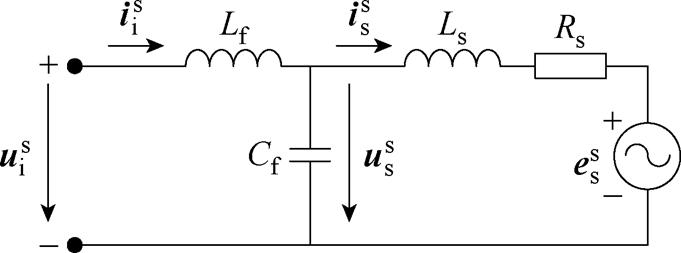
图2 LC-PMSM系统等效电路
Fig.2 Equivalent circuit of LC-equipped PMSM
定子电阻可以忽略,以考虑最恶劣的谐振情况,同时将三相静止坐标系变换到两相同步旋转坐标系[15],则逆变器侧电压到逆变器侧电流的传递函数 为
为
 (1)
(1)
其中
 (2)
(2)
式中, 为电机的电角频率;
为电机的电角频率; 为LCL谐振角频率;
为LCL谐振角频率; 为LCL反谐振角频率。
为LCL反谐振角频率。
注意到在同步旋转坐标系中,谐振频率 和反谐振频率
和反谐振频率 均会随着的变化而发生漂移,有
均会随着的变化而发生漂移,有
 (3)
(3)
式中,上标“'”表示同步旋转坐标系下的变量; 为电机的电输出频率。
为电机的电输出频率。
对于LC滤波器,为减小其对正常系统运行的影响,以及尽可能抑制电流谐波,应介于7倍的最大电输出频率和奈奎斯特频率之间[18],即
 (4)
(4)
式中, 为电机的最大电输出频率;
为电机的最大电输出频率; 为开关频率。
为开关频率。
离散域下逆变器侧电流反馈控制回路框图如图3所示。

图3 离散域逆变器侧电流控制回路框图
Fig.3 Block diagram of the inverter current control loop in z-domain
系统的采用时间为 ,通过对连续域传递函数(见式(1))进行零阶保持器离散化,可得到离散域下逆变器侧电压到逆变器侧电流的传递函数
,通过对连续域传递函数(见式(1))进行零阶保持器离散化,可得到离散域下逆变器侧电压到逆变器侧电流的传递函数 为
为
 (5)
(5)
 为旋转坐标系下的计算延迟及引起的角度延迟,传递函数为
为旋转坐标系下的计算延迟及引起的角度延迟,传递函数为
 (6)
(6)
 为旋转坐标系下的相位补偿项,有
为旋转坐标系下的相位补偿项,有
 (7)
(7)
 和
和 分别为阻尼滤波器和控制器在离散域下的传递函数。其中,控制采用比例-积分(Proportional-Integral, PI)控制器,其传递函数为
分别为阻尼滤波器和控制器在离散域下的传递函数。其中,控制采用比例-积分(Proportional-Integral, PI)控制器,其传递函数为
 (8)
(8)
式中,Kp、Ki分别为比例、积分增益。
对于设计合理的LC滤波器,对截止频率或低于截止频率的环路增益计算时,可以忽略电容的影响。在调节参数时,只考虑滤波器电感的影响。则比例增益和积分增益可表示[19]为
 (9)
(9)
式中, 为d轴和q轴电流控制器的截止频率,可根据情况具体设定。
为d轴和q轴电流控制器的截止频率,可根据情况具体设定。
系统在离散域下的环路增益最终可表示为
 (10)
(10)
根据式(10),系统环路增益的相位 可表示为
可表示为
 (11)
(11)
式中, 、
、 、
、 、
、 和
和 分别为、、、和的相位。
分别为、、、和的相位。
中积分项对系统的影响主要在远低于谐振频率的低频段。由于本文关注的是谐振频率处的相频特性,所以评估稳定性和鲁棒性时,仅用比例增益 代替,忽略其积分部分[11]。此时有
代替,忽略其积分部分[11]。此时有 。
。
将 代入
代入 可得
可得
 (12)
(12)
相位补偿项的相位可表示为
 (13)
(13)
由LC滤波器和电机电感引起的LCL谐振在实际达到谐振频率和反谐振频率之前并没有相位贡献,因此 [10],故最终可表示为
[10],故最终可表示为
 (14)
(14)
对于无滤波器主动阻尼采用逆变器侧电流反馈的控制系统,有 ,即
,即 。根据相位裕度的定义[20],为使该控制系统稳定,系统的相频特性应避免在
。根据相位裕度的定义[20],为使该控制系统稳定,系统的相频特性应避免在 处穿越
处穿越 (k为整数)。这意味着在处的相频特性的左右极限必须位于范围内,表示为
(k为整数)。这意味着在处的相频特性的左右极限必须位于范围内,表示为
 (15)
(15)
一般控制系统相位滞后的范围不能过大,因此只需要考虑 的情况,此时使系统稳定时的范围为
的情况,此时使系统稳定时的范围为
 (16)
(16)
(1)当 时,求解得到此时系统稳定所需的的范围为
时,求解得到此时系统稳定所需的的范围为 ,由于LC滤波器设计需求[18],
,由于LC滤波器设计需求[18], ,因此该情况不成立。
,因此该情况不成立。
(2)当 时,求解得到系统稳定所需的范围为
时,求解得到系统稳定所需的范围为 。
。
因此,在不使用滤波器主动阻尼且采用逆变器侧电流反馈控制的系统中,只有当电机系统的位于范围内,才能确保整个系统稳定。然而,对于大多数电机系统而言,为降低成本,一般选用感值和容值较小的滤波电感和电容。针对本文所研究的LC-PMSM系统,参数见表1,
 ,故该系统在无阻尼的情况下采用逆变器侧电流反馈控制将导致系统不稳定。因此,需引入滤波器主动阻尼以重塑开环相频特性。
,故该系统在无阻尼的情况下采用逆变器侧电流反馈控制将导致系统不稳定。因此,需引入滤波器主动阻尼以重塑开环相频特性。
表1 LC-PMSM系统参数
Tab.1 LC-PMSM system parameters
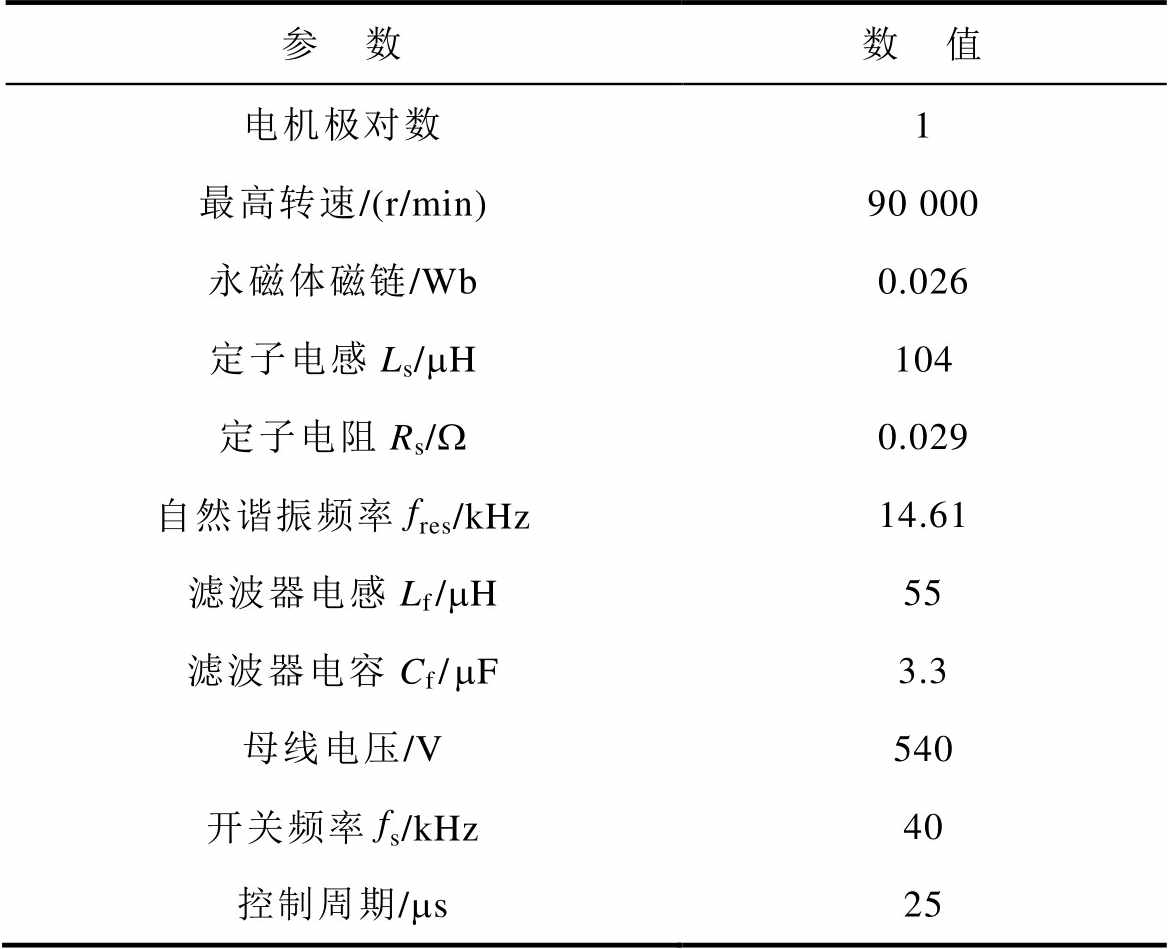
参 数数 值 电机极对数1 最高转速/(r/min)90 000 永磁体磁链/Wb0.026 定子电感Ls/mH104 定子电阻Rs/W0.029 自然谐振频率fres/kHz14.61 滤波器电感Lf/mH55 滤波器电容Cf/mF3.3 母线电压/V540 开关频率fs/kHz40 控制周期/ms25
在加入滤波器主动阻尼后,系统引入了相位延迟。为了确保系统在不同处相频特性的左右极限位于内,系统稳定所需的开环相频特性条件为
 (17)
(17)
求解得到在不同处,所需滤波器主动阻尼的相频特性的范围为
 (18)
(18)
可以看出,在特定的下,如果 保持在式(18)解的区域内时,则系统稳定。换言之,上述不等式描述了一组以谐振频率为横坐标,以滤波器相位为纵坐标的平面线性规划区域,该不等式的解即为:为保持系统稳定,滤波器主动阻尼在不同处应提供的延迟相位范围。
保持在式(18)解的区域内时,则系统稳定。换言之,上述不等式描述了一组以谐振频率为横坐标,以滤波器相位为纵坐标的平面线性规划区域,该不等式的解即为:为保持系统稳定,滤波器主动阻尼在不同处应提供的延迟相位范围。
为了保证滤波器主动阻尼的鲁棒性,需要考虑因电机运行频率、电机参数及LC滤波器参数变化而引起的谐振频率漂移。假设从0扫频到 (
( 为奈奎斯特频率),这是实际中最宽的漂移范围。当k取不同整数时,通过式(18)的解可以确定系统稳定时的滤波器主动阻尼相位区域,如图4蓝色阴影区域所示。
为奈奎斯特频率),这是实际中最宽的漂移范围。当k取不同整数时,通过式(18)的解可以确定系统稳定时的滤波器主动阻尼相位区域,如图4蓝色阴影区域所示。
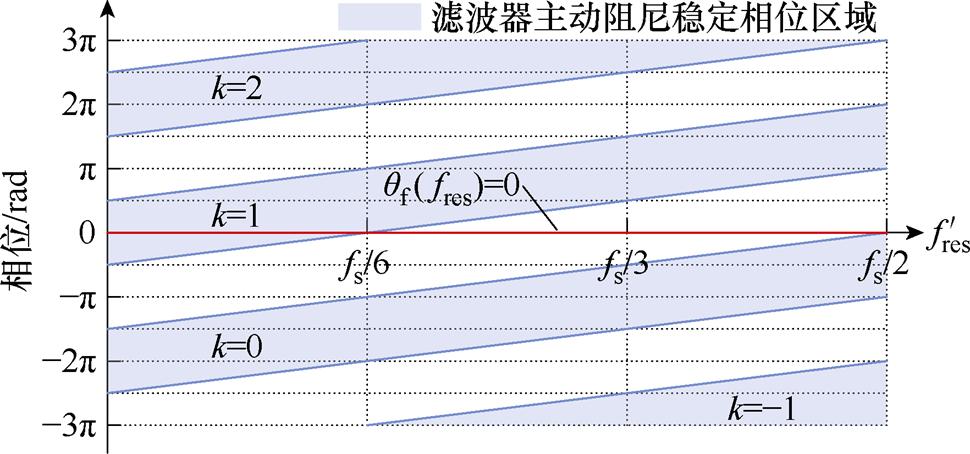
图4 滤波器主动阻尼稳定相位区域通用图解方法
Fig.4 General graphical method for active damping stable phase region of filters
仍然以电机在无阻尼情况下采用逆变器侧电流反馈控制为例,此时 ,如图4中红色直线所示,该直线与稳定相位区域边界相交于
,如图4中红色直线所示,该直线与稳定相位区域边界相交于 。这表明一旦
。这表明一旦 成立,则系统稳定,不需要主动阻尼控制;反之,系统不能保证稳定。这些结论与2.1节中的计算分析相同。
成立,则系统稳定,不需要主动阻尼控制;反之,系统不能保证稳定。这些结论与2.1节中的计算分析相同。
根据上述分析,所提滤波器主动阻尼稳定相位区域通用图解方法能够有效评估基于滤波器主动阻尼的LC-PMSM控制系统在谐振频率发生漂移时的稳定性和鲁棒性,并且便于实施。
通过绘制图4所提出的滤波器主动阻尼稳定相位区域通用图解方法所候选阻尼滤波器的,可以很容易地识别出系统稳定相位区域的频率范围。滤波器主动阻尼的谐振抑制效果及鲁棒性可以用该图形法进行评估。
传统基于滤波器主动阻尼且采用逆变器侧电流反馈的谐振抑制方法为加入NF[13]。NF在离散域的传递函数表示为
 (19)
(19)
其中


式中, 为陷波频率;
为陷波频率; 为阻尼比。
为阻尼比。
图5展示了不同NF在通用图解方法中的相位,可以看出,该方法能提供相位稳定区域有限,仅适用于谐振频率变化范围不大的情况。然而,高速PMSM的谐振频率漂移范围很大,故该算法的鲁棒性较差。
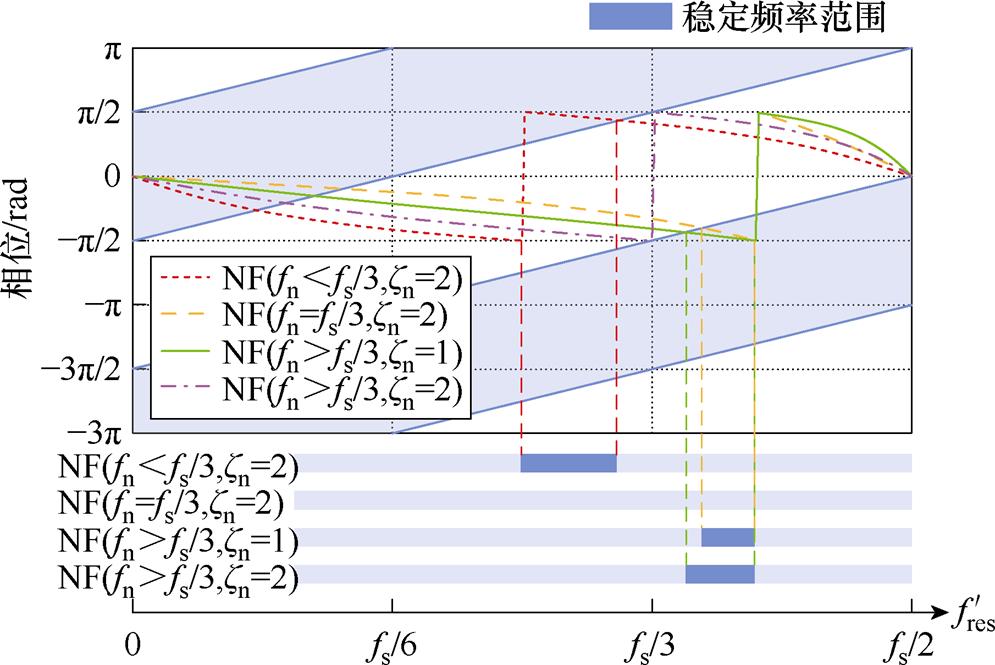
图5 NF稳定相位区域频率范围
Fig.5 Stable phase region frequency range of NF
常用的一阶滤波器主要包括低通滤波器(Low- Pass Filter, LPF)和APF;延迟滤波器(Delay Filter, DF)可以提供相位滞后,这与一阶滤波器的特性相似。
LPF在离散域的传递函数表示为
 (20)
(20)
式中, 为LPF的截止频率。
为LPF的截止频率。
APF在整个频率范围内的增益为0 dB,其在离散域的传递函数[16]可表示为
 (21)
(21)
式中,r为APF的极点。
DF为延迟环节,在离散域的传递函数表示为
 (22)
(22)
图6展示了APF、DF和LPF在通用图解方法中的相位。从图中可以看出,它们在稳定相位区域内均能实现连续大范围的稳定频率范围。对比三者的相位可知,APF的稳定频率范围的极限最大,为 ;其次是DF,由于无法对延迟环节进行参数设计,故其稳定频率范围不发生改变,为
;其次是DF,由于无法对延迟环节进行参数设计,故其稳定频率范围不发生改变,为 ;而LPF的稳定频率范围的极限最小,为
;而LPF的稳定频率范围的极限最小,为 。
。
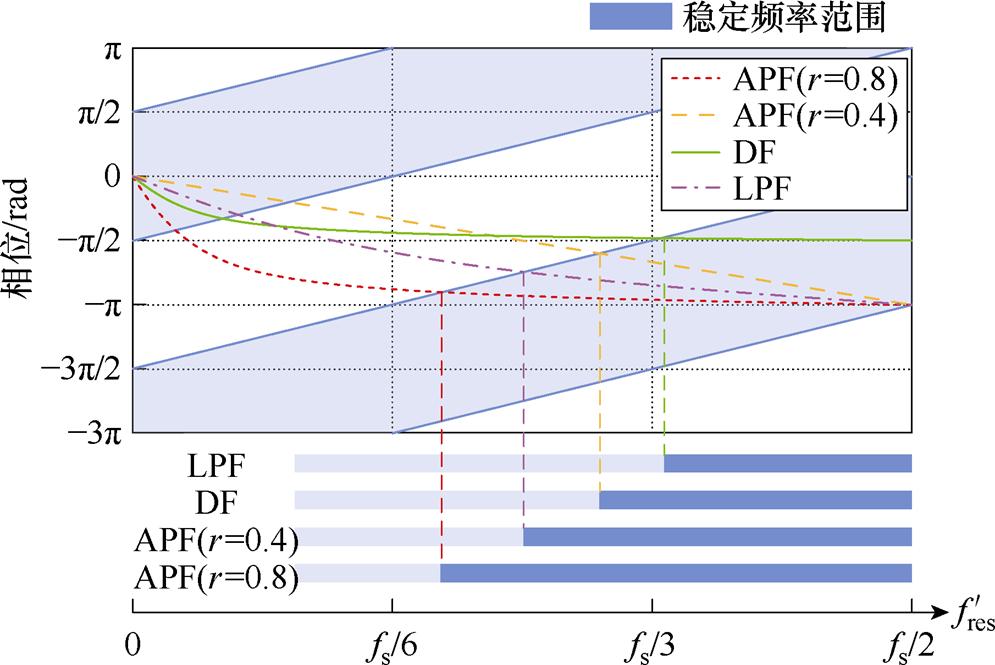
图6 APF、DF和LPF稳定相位区域频率范围
Fig.6 Stable phase region frequency range of APF, DF and LPF
通过对上述不同滤波器的相位与稳定频率范围的分析,可以得出结论:为了实现可靠的谐振抑制效果,并确保谐振频率漂移的鲁棒性,滤波器应具备连续的稳定频率范围,其稳定频率范围的上限应尽可能接近,而下限应尽可能接近。
与NF相比,由于NF的稳定频率范围较窄,而高速电机在运行中的谐振频率漂移范围很大,故当高速PMSM转速升高时会导致系统相位裕度降低甚至不稳定;与LPF相比,APF在提供相位滞后的同时,不会改变系统的幅频特性,且稳定频率范围的极限更宽,为LPF稳定频率范围的2倍;与DF相比,APF稳定频率范围的极限不仅更宽,并且由传递函数的表达式(21)和式(22)可知,DF仅能在特定频率处实现固定不变的相位滞后,而APF可以通过调节参数在特定频率处实现所需特定的相位滞后,故APF在相位滞后方面具有更高的灵活性。因此,对比上述常见的滤波器,APF在基于滤波器的主动阻尼的应用中具有明显的优势。
综合分析表明,将APF应用于逆变器侧电流反馈控制系统可以实现最佳的谐振抑制效果。该方案不会改变系统的幅频特性;而且APF的稳定频率范围的极限更宽,为 ,对系统谐振频率的漂移具有优异的鲁棒性;同时其参数设计简单,仅需设计一个参数,且在相位重塑方面具有更高的灵活性。通过该图解法得出的滤波器主动阻尼的有效性和鲁棒性将在第5节的仿真和实验中得到证明。
,对系统谐振频率的漂移具有优异的鲁棒性;同时其参数设计简单,仅需设计一个参数,且在相位重塑方面具有更高的灵活性。通过该图解法得出的滤波器主动阻尼的有效性和鲁棒性将在第5节的仿真和实验中得到证明。
3.1节分析表明,使用APF是采用逆变器侧电流反馈控制的谐振抑制滤波器主动阻尼的最佳解决方案。在此基础上,有必要对APF的参数设计进行讨论,以确保谐振抑制的有效性。
图7给出了不同极点r时APF的相位,从图中可以看出,随着r的增大,其相位滞后随之增大。因此,可以通过调整r的大小来保证在特定频率下实现所需的相位滞后。
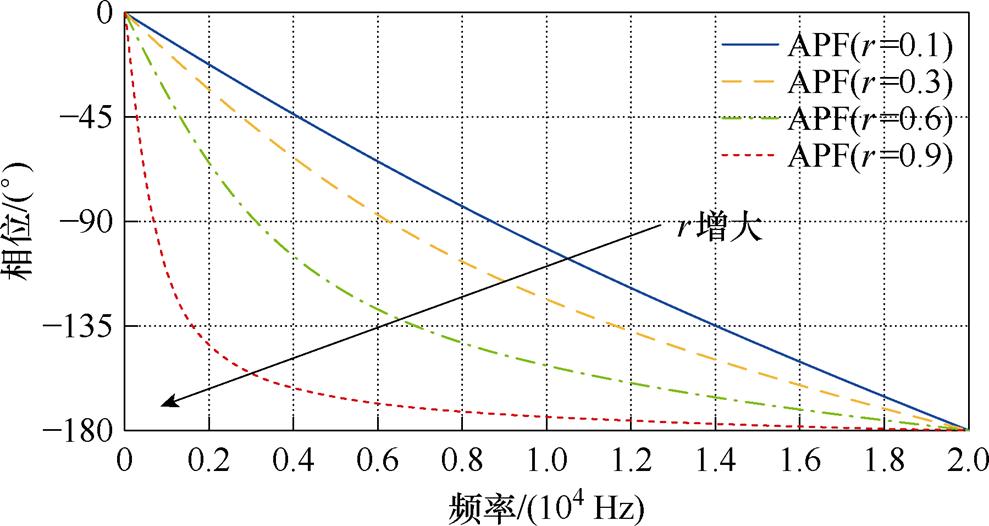
图7 不同极点r时APF相位
Fig.7 Phase of APF with different poles r
APF的相频特性可由式(21)推导为
 (23)
(23)
式中,f为频率。
如果在所需APF提供相位滞后的频率 处指定相位滞后
处指定相位滞后 ,则r可以求解为
,则r可以求解为
 (24)
(24)
其中
相位重塑最基本的要求是确保将处的相位放置在 和
和 之间,避免负相位裕度的产生。由式(17)可知,为了确保系统的稳定性,在处APF的极限期望滞后相位可表示为
之间,避免负相位裕度的产生。由式(17)可知,为了确保系统的稳定性,在处APF的极限期望滞后相位可表示为
 (25)
(25)
将 代入式(25)可以计算得到
代入式(25)可以计算得到
 (26)
(26)
通常情况下,高速电机控制系统的漂移范围在之内,根据区间极限计算得到所需APF提供的滞后相位约为 。值得一提的是,APF最多能够提供−180°的滞后相位。因此,APF可以提供足够的相位滞后使基于逆变器侧电流反馈的LC-PMSM系统稳定。这与3.1节及图6的分析中提到的APF稳定频率范围的极限为具有相同的结论。
。值得一提的是,APF最多能够提供−180°的滞后相位。因此,APF可以提供足够的相位滞后使基于逆变器侧电流反馈的LC-PMSM系统稳定。这与3.1节及图6的分析中提到的APF稳定频率范围的极限为具有相同的结论。
以PMSM转速60 000 r/min为例设计APF参数r。考虑第二次截止频率位于左侧,大小为1.30×104 Hz;同时要求系统在处保证60°左右的相位裕度,此时计算所需APF提供的相位滞后 。将和代入式(24),求解得出r=0.471 5。60 000 r/min加入APF主动阻尼前后系统开环伯德图如图8所示,此时系统在谐振频率处的相位位于和之间;同时系统的最小相位裕度为60.1°,最小幅值裕度为11.3 dB。这表明系统稳定,并且具有充分的稳定裕度。
。将和代入式(24),求解得出r=0.471 5。60 000 r/min加入APF主动阻尼前后系统开环伯德图如图8所示,此时系统在谐振频率处的相位位于和之间;同时系统的最小相位裕度为60.1°,最小幅值裕度为11.3 dB。这表明系统稳定,并且具有充分的稳定裕度。
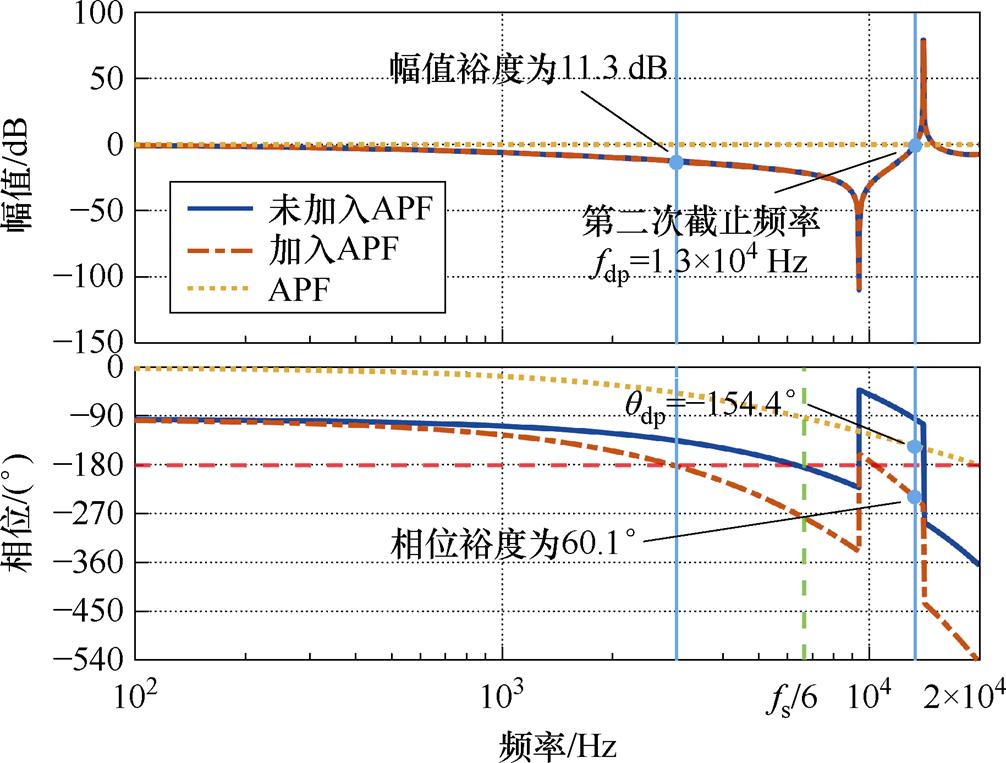
图8 60 000 r/min加入APF主动阻尼前后系统开环伯德图
Fig.8 Open loop Bode plot of the system before and after adding APF active damping at 60 000 r/min
根据3.2节的分析可知,通过设计APF参数r,可以提供足够的相位滞后以确保系统的稳定性,并具备良好的稳定裕度。然而,高速PMSM的工作转速范围非常广,可达0~90 000 r/min,由式(3)可知,这将导致显著的谐振频率漂移。随着电机转速的增加,系统频率响应特性整体会向伯德图左侧低频处漂移,当电机转速达到90 000 r/min时,谐振频率会减小10%左右。因此,当谐振频率发生漂移时,为了保证鲁棒性,需要根据电机转速实时调整APF参数r,以确保系统保持较高的相位裕度。
参数设计流程具体描述如下:
(1)计算开环系统在不同转速下的第二次截止频率 。
。
定义 为开环系统在电机转速为0 r/min时第二次截止频率。在此情况下,系统的幅频增益为单位增益,即
为开环系统在电机转速为0 r/min时第二次截止频率。在此情况下,系统的幅频增益为单位增益,即 ,具体表示为
,具体表示为
 (27)
(27)
对于本文所研究的LC-PMSM系统,通过数值求解得到 Hz。
Hz。
电机转速的升高会导致开环系统的第二次截止频率发生漂移,与式(3)类似,具体表示为
 (28)
(28)
根据式(27)和式(28),可以求解出开环系统在不同转速下的。
(2)根据相位裕度指标,计算在处所需APF的滞后相位 。
。
根据经典控制理论,为提高控制系统的鲁棒性,设计APF参数r时需确保在处保持60°的相位裕度[20],即希望得到开环系统在处的相位
 。
。
因此,根据、 和式(25),得到所需APF的滞后相位可表示为
和式(25),得到所需APF的滞后相位可表示为
 (29)
(29)
代入相关参数即可计算得到。
(3)计算APF的参数r。
将上述计算过程中得到的和代入式(24),即可求得所设计的APF参数r。
采用上述APF参数设计流程,针对本文所研究的LC-PMSM系统,从0 r/min起,以每隔10 000 r/min的增量设计APF参数r。r随转速变化的关系如图9所示,可以观察到APF参数r与转速n之间呈现出显著的线性正相关关系。通过最小二乘法进行线性拟合,获得相关的线性模型为
 (30)
(30)
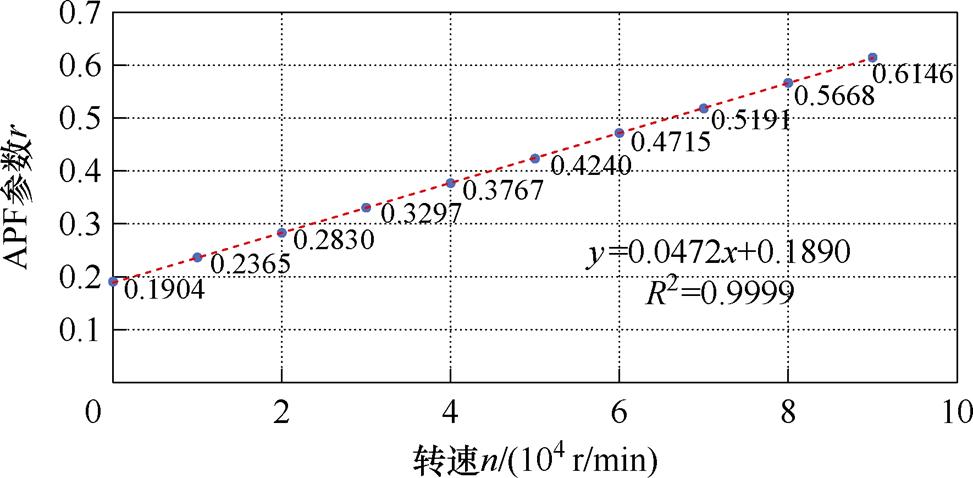
图9 APF参数r和电机转速n的关系
Fig.9 The relationship between the parameter r of APF and the motor speed n
进一步计算得出相关性系数 ,这表明所采用的线性回归模型具有极佳的拟合效果。因此,该线性模型能够有效表示电机在0~90 000 r/min范围内的任意转速n与APF参数r之间的关系。
,这表明所采用的线性回归模型具有极佳的拟合效果。因此,该线性模型能够有效表示电机在0~90 000 r/min范围内的任意转速n与APF参数r之间的关系。
APF主动阻尼参数设计流程如图10所示。
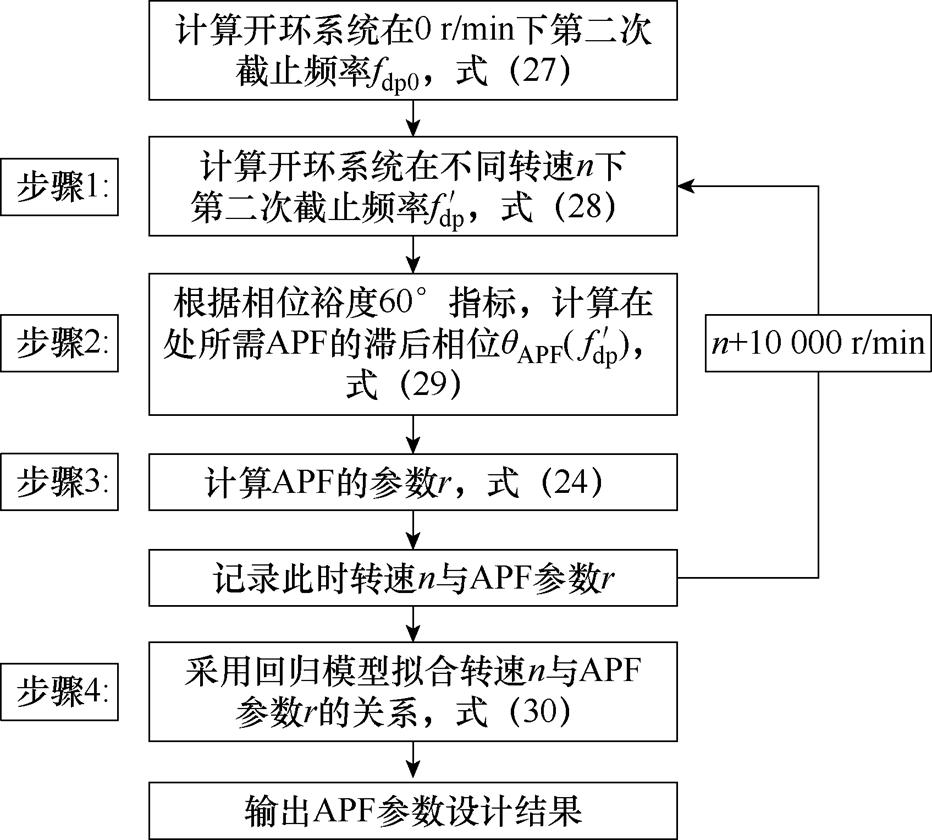
图10 APF主动阻尼参数设计流程
Fig.10 APF active damping parameter design flowchart
图11展示了PMSM在不同转速下,加入所设计的APF主动阻尼后的系统伯德图。可以看出,系统在第二次截止频率处均具有60°左右的相位裕度,满足系统稳定性设计要求。
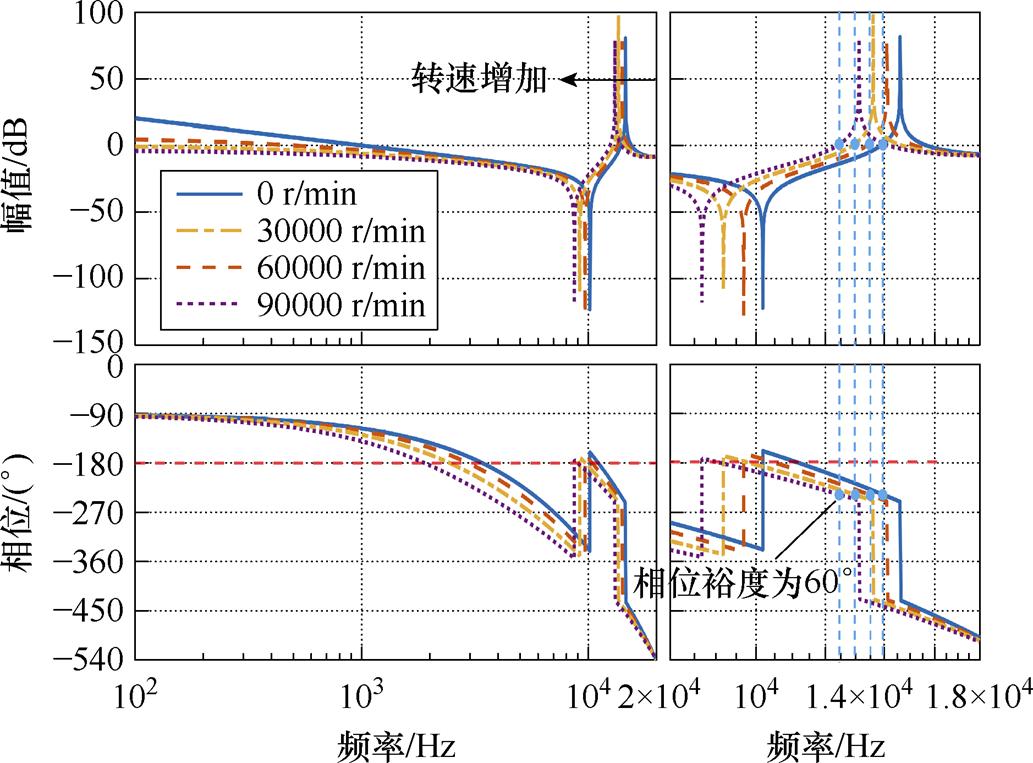
图11 PMSM在不同转速下加入APF后的伯德图
Fig.11 Bode plots of PMSM with APF added at different speeds
综合式(5)~式(9)的分析可知,系统参数误差影响的部分为逆变器侧电压到逆变器侧电流的传递函数,其余传递函数不受参数误差影响。考虑参数误差的闭环传递函数可表示为
 (31)
(31)
式中,“ ”上标表示该变量由失配参数计算得到。由图3及式(10)可知,
”上标表示该变量由失配参数计算得到。由图3及式(10)可知, 可表示为
可表示为
 (32)
(32)
因此,可得影响系统稳定性的参数主要为:电机电感、LC滤波器电感和电容。
高速PMSM的工作转速为30 000~90 000 r/min,同时也研究了零转速时不同参数影响下的根轨迹图,由于与30 000 r/min下结果类似,限于篇幅原因未进行展示。因此,本论文分别取最低转速30 000 r/min和最高转速90 000 r/min进行鲁棒性分析。同时按照电机转速范围的平均转速45 000 r/min设计固定参数r=0.400 3,与r随转速n实时变化的参数鲁棒性进行对比,以验证所提参数选取方法的优越性。图12~图15中,黑色箭头代表参数增大的方向。
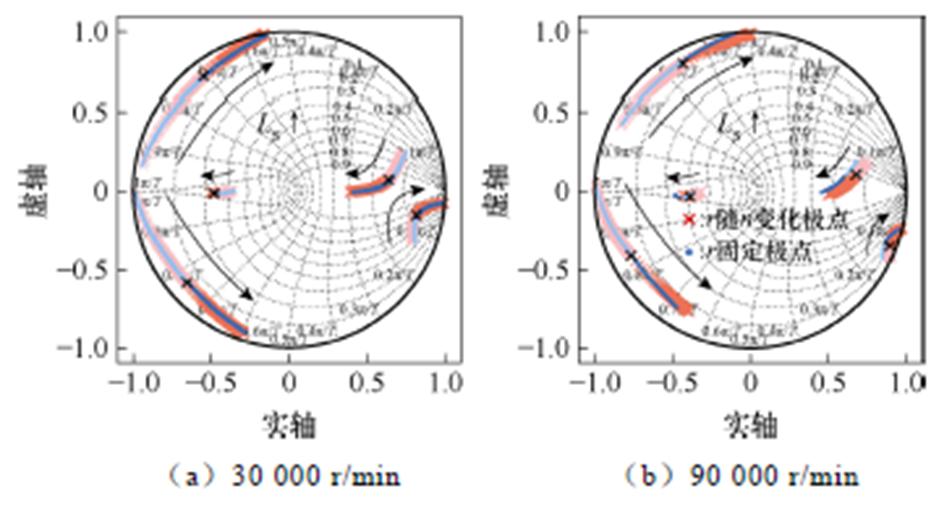
图12 电机电感参数失配的极点轨迹
Fig.12 Pole trajectory of motor inductance parameter mismatch
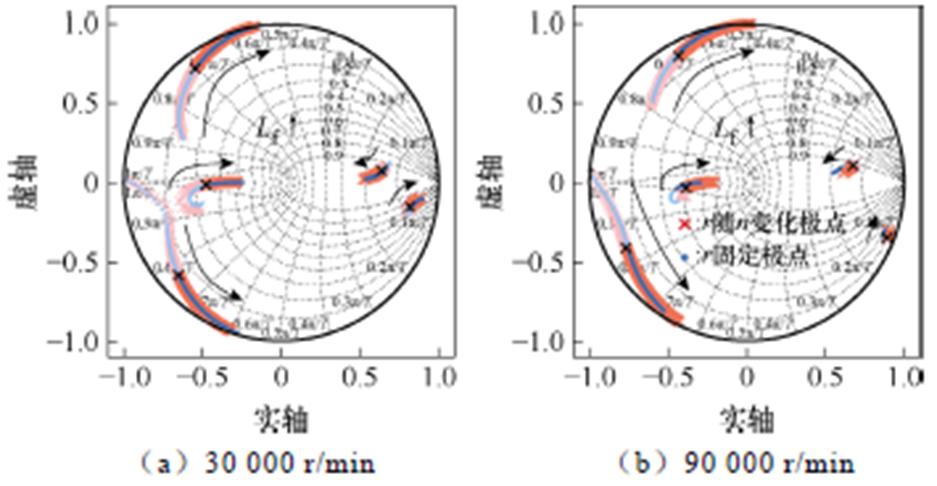
图13 LC滤波器电感参数失配的极点轨迹
Fig.13 Pole trajectory of LC filter inductance parameter mismatch
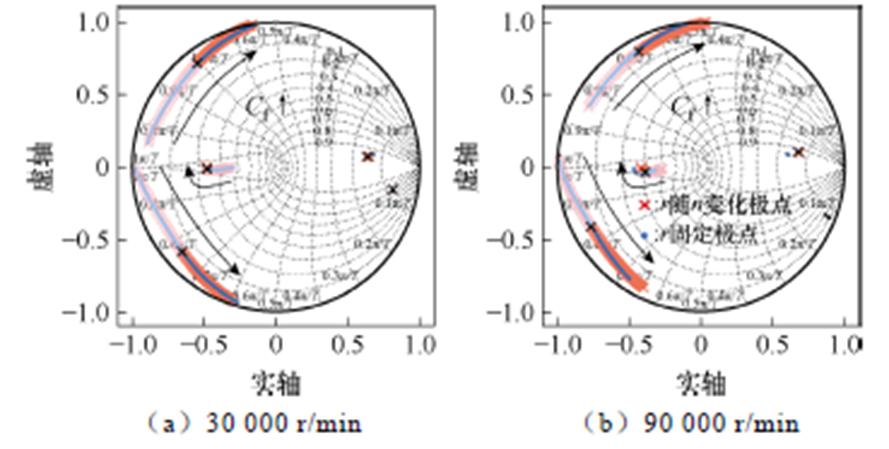
图14 LC滤波器电容参数失配的极点轨迹
Fig.14 Pole trajectory of capacitor parameter mismatch in LC filter
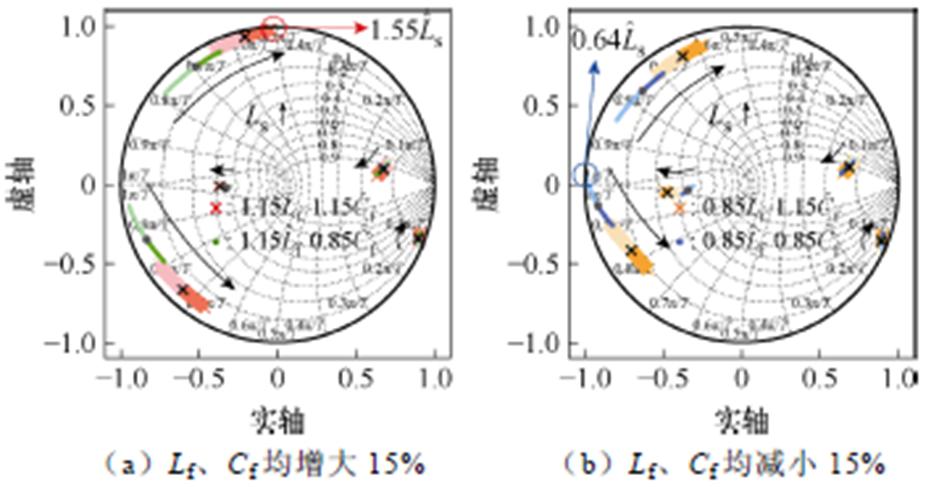
图15 LC滤波器参数失配情况下电机电感参数变化的极点轨迹(n=90 000 r/min)
Fig.15 Pole trajectory of motor inductance parameter variation under LC filter parameter mismatch (n=90 000 r/min)
在高速PMSM的运行过程中,由于磁饱和效应和交叉耦合效应,会逐渐低于其实际值[21]。图12展示了电机在30 000 r/min和90 000 r/min下APF主动阻尼法电机电感的参数鲁棒性分析结果。
从图12可以看出,在r随转速n实时变化的情况下,30 000 r/min时,的鲁棒范围为 ;90 000 r/min时,的鲁棒范围为
;90 000 r/min时,的鲁棒范围为 。在固定r的情况下,30 000 r/min时,的鲁棒范围为
。在固定r的情况下,30 000 r/min时,的鲁棒范围为 ;90 000 r/min时,的鲁棒范围为
;90 000 r/min时,的鲁棒范围为 。
。
LC滤波器参数误差主要来源于制造误差[12],图13和图14分别展示了电机在30 000 r/min和90 000 r/min下APF主动阻尼法LC滤波器电感和电容的参数鲁棒性分析结果。
从图13可以看出,在r随转速n实时变化的情况下,30 000 r/min时,的鲁棒范围为 ;90 000 r/min时,的鲁棒范围为
;90 000 r/min时,的鲁棒范围为 。在固定r的情况下,30 000 r/min时,的鲁棒范围为
。在固定r的情况下,30 000 r/min时,的鲁棒范围为 ;90 000 r/min时,的鲁棒范围为
;90 000 r/min时,的鲁棒范围为 。
。
从图14可以看出,在r随转速n实时变化的情况下,30 000 r/min时,的鲁棒范围为 ;90 000 r/min时,的鲁棒范围为
;90 000 r/min时,的鲁棒范围为 。在固定r的情况下,30 000 r/min时,的鲁棒范围为
。在固定r的情况下,30 000 r/min时,的鲁棒范围为 ;90 000 r/min时,的鲁棒范围为
;90 000 r/min时,的鲁棒范围为 。
。
通过上述鲁棒性分析结果可以看出,当采用平均转速设计固定参数r时,系统在高于此转速下的相位裕度均会降低,参数鲁棒性减弱,影响系统的稳定性;当采用r随转速n线性拟合模型时,系统在不同转速下拥有相同的相位裕度,故系统在全速域下具有大致相等的参数鲁棒性范围,对电机电感、LC滤波器电感和电容均具有较强的参数鲁棒性。
图15展示了电机在90 000 r/min下,LC滤波器电感和电容分别变化±15%后,APF主动阻尼法电机电感的参数鲁棒性分析结果。
从图15中的极端情况可以看出,当、均增大15%后,系统能容忍变化的最大值为1.55 ;当、均减小15%后,系统能容忍变化的最小值为0.64。因此,在考虑和变化±15%的情况下,的鲁棒范围为
;当、均减小15%后,系统能容忍变化的最小值为0.64。因此,在考虑和变化±15%的情况下,的鲁棒范围为 。
。
为验证本文所提方法的有效性,搭建了图16所示的40 kW燃料电池用高速空压机实验平台,实验和仿真中的系统参数与第2~4节理论分析一致,见表1。实验平台包括高速空气压缩机、LC滤波器、电机控制器、示波器、信号转换装置(Kvaser)、数据采集装置(Vector VX 1060)等。PMSM控制采用直轴电流 的矢量控制算法。所使用的控制器为Infineon Aurix TC387,PWM开关及更新频率为40 kHz。通过Kvaser将程序下载到微处理器中,控制器以英飞凌数字信号微处理器为核心;数据采集装置通过以太网将采集到的信号实时地传输反馈给上位机。
的矢量控制算法。所使用的控制器为Infineon Aurix TC387,PWM开关及更新频率为40 kHz。通过Kvaser将程序下载到微处理器中,控制器以英飞凌数字信号微处理器为核心;数据采集装置通过以太网将采集到的信号实时地传输反馈给上位机。
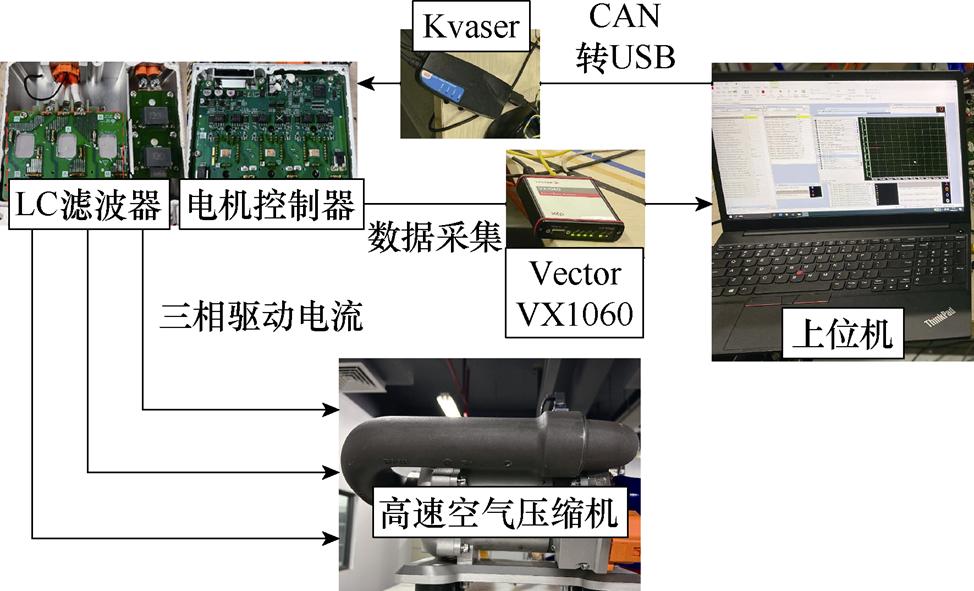
图16 实验平台
Fig.16 Experimental platform
图17为滤波器主动阻尼切换过程的仿真结果,电机运行于转速控制模式,给定转速为60 000 r/min,并在运行过程中由无阻尼状态切换为APF主动阻尼状态。蓝(深)色为q轴电流,黄(浅)色为d轴电流。运行仿真可以看出,当系统工作于无阻尼状态时,电机电流中存在高频振动的谐波分量,滤波器阻尼使能后,系统迅速趋于稳定。
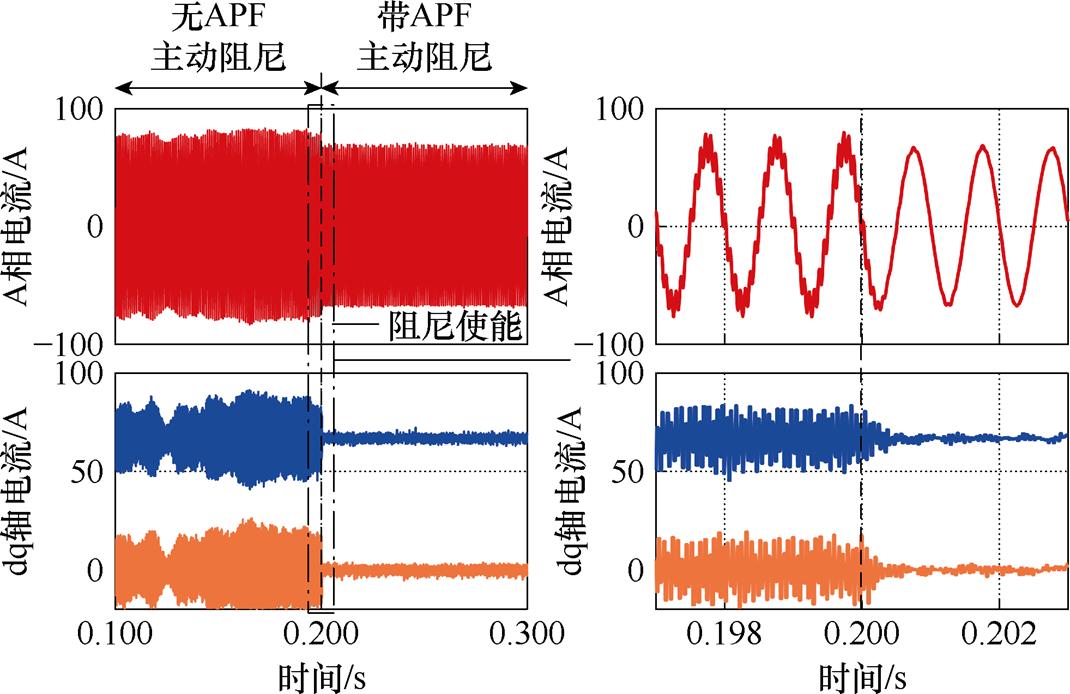
图17 60 000 r/min滤波器主动阻尼切换过程
Fig.17 Active damping filter switching process at 60 000 r/min
图18为阻尼切换前后电机相电流快速傅里叶变换(Fast Fourier Transform, FFT)分析结果。结果表明,应用所提出的APF主动阻尼的方法,谐振频率以及其附近的谐波得到有效抑制,定子电流总谐波畸变率(Total Harmonic Distortion, THD)维持在期望水平,表明所提出方法的有效性。
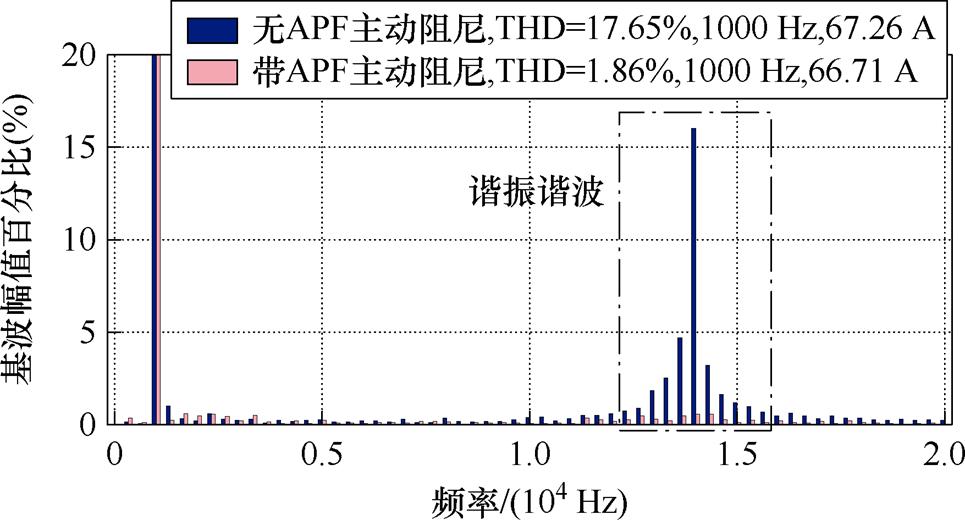
图18 60 000 r/min阻尼切换前后相电流FFT分析结果
Fig.18 FFT analysis results of motor phase current before and after damping switching at 60 000 r/min
图19分别为传统的NF、LPF、DF和所提APF主动阻尼算法全速域仿真对比,在1 s时刻给定转速从30 000 r/min上升到90 000 r/min。
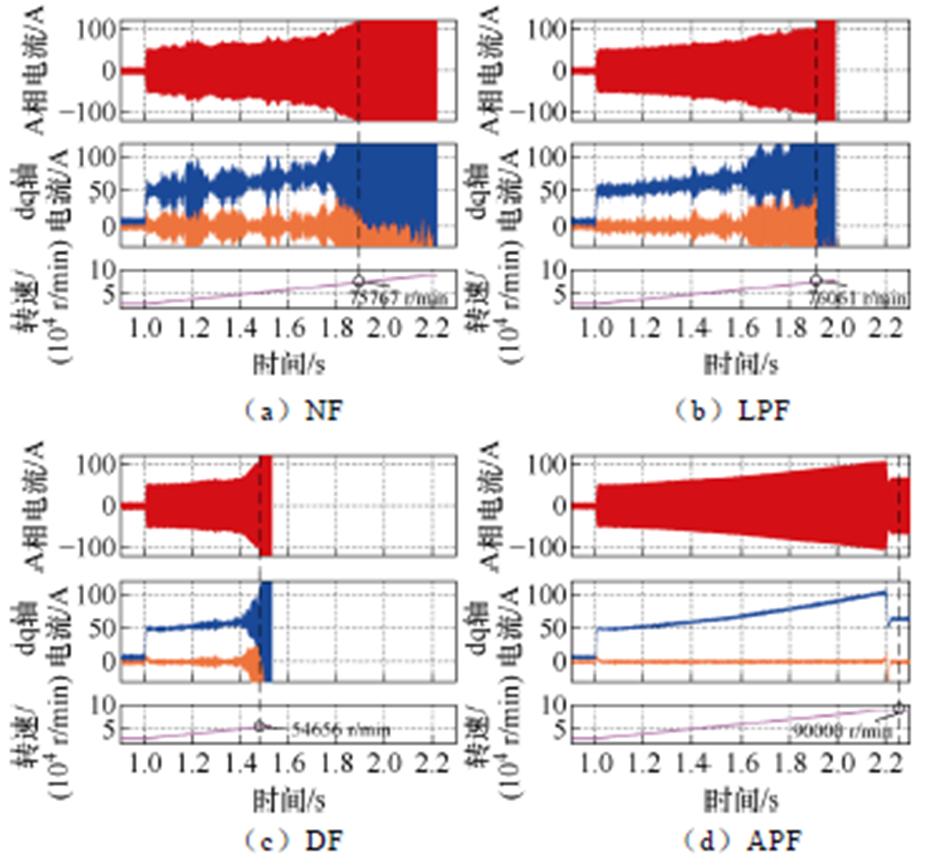
图19 NF、LPF、DF和APF主动阻尼对比结果
Fig.19 Comparison results of active damping among NF、LPF、DF and APF
图19a为传统的NF主动阻尼算法的全速域仿真,NF参数根据文献[13]所提方法进行设计。由于系统的谐振频率大于 ,NF只能提供相位滞后作用,需设计陷波频率大于谐振频率,故取陷波频率
,NF只能提供相位滞后作用,需设计陷波频率大于谐振频率,故取陷波频率 Hz;为保证更宽的相位滞后范围,取阻尼比
Hz;为保证更宽的相位滞后范围,取阻尼比 。系统的自然谐振频率为1.461×104 Hz,当转速到达75 767 r/min时,谐振频率减小为1.334×104 Hz,到达NF稳定域的边界=1.333×104 Hz。如图5所示,此时NF无法为系统提供相位裕度,故系统失稳。
。系统的自然谐振频率为1.461×104 Hz,当转速到达75 767 r/min时,谐振频率减小为1.334×104 Hz,到达NF稳定域的边界=1.333×104 Hz。如图5所示,此时NF无法为系统提供相位裕度,故系统失稳。
图19b为LPF主动阻尼算法的全速域仿真,为了降低LPF对主控制回路截止频率的影响,设计LPF的截止频率=20 000 rad/s。系统的自然谐振频率为1.461×104 Hz。当转速到达76 061 r/min时,谐振频率减小为1.334×104 Hz,到达LPF稳定域的边界=1.333×104 Hz。如图6所示,此时LPF无法为系统提供相位裕度,故系统失稳。
图19c为DF主动阻尼算法的全速域仿真,考虑到图6中DF的临界稳定转速经计算为156 400 r/min,超过了规定参数下系统最大转速90 000 r/min。故令 ,计算可得此时自然谐振频率为1.292× 104 Hz,当转速到达54 655 r/min时,谐振频率减小为1.201×104 Hz,到达DF稳定域的边界
,计算可得此时自然谐振频率为1.292× 104 Hz,当转速到达54 655 r/min时,谐振频率减小为1.201×104 Hz,到达DF稳定域的边界 = 1.200×104 Hz。如图6所示,此时DF无法为系统提供相位裕度,故系统失稳。
= 1.200×104 Hz。如图6所示,此时DF无法为系统提供相位裕度,故系统失稳。
图19d为提出的APF主动阻尼算法的全速域仿真,为了与DF对比,同样令,计算可得此时临界稳定转速为375 200 r/min,系统在30 000~ 90 000 r/min全速域稳定。
仿真结果表明,所提出的APF主动阻尼算法相较于传统的NF、LPF和DF主动阻尼算法的参数鲁棒性提升明显,同时验证了所提通用图解法的准确性。上述不同滤波器主动阻尼的设计参数及运行结果对比见表2。
表2 不同滤波器主动阻尼参数及运行结果对比
Tab.2 Parameters and operating results of different active damping filters
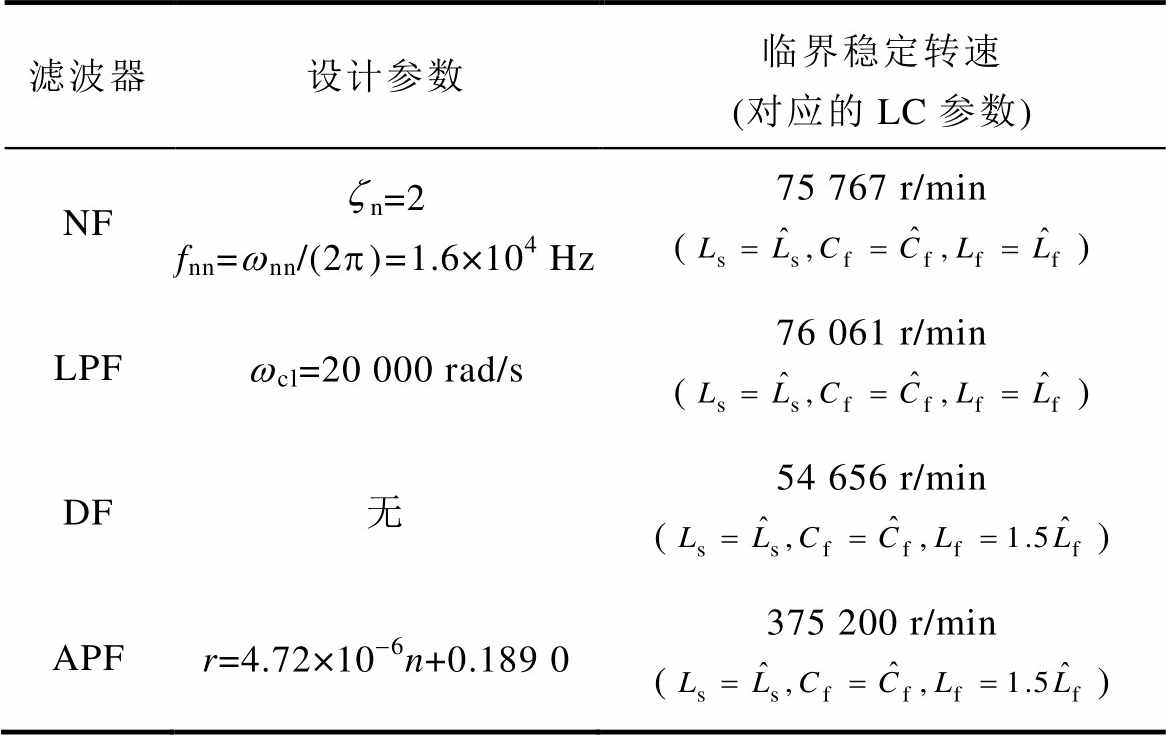
滤波器设计参数临界稳定转速(对应的LC参数) NFzn=2fnn=wnn/(2p)=1.6×104 Hz75 767 r/min() LPFwcl=20 000 rad/s76 061 r/min() DF无54 656 r/min() APFr=4.72×10-6n+0.189 0375 200 r/min()
图20和图21分别为不同滤波器主动阻尼算法全速域(30 000 r/min→60 000 r/min→90 000 r/min)对比实验和相电流FFT分析结果。
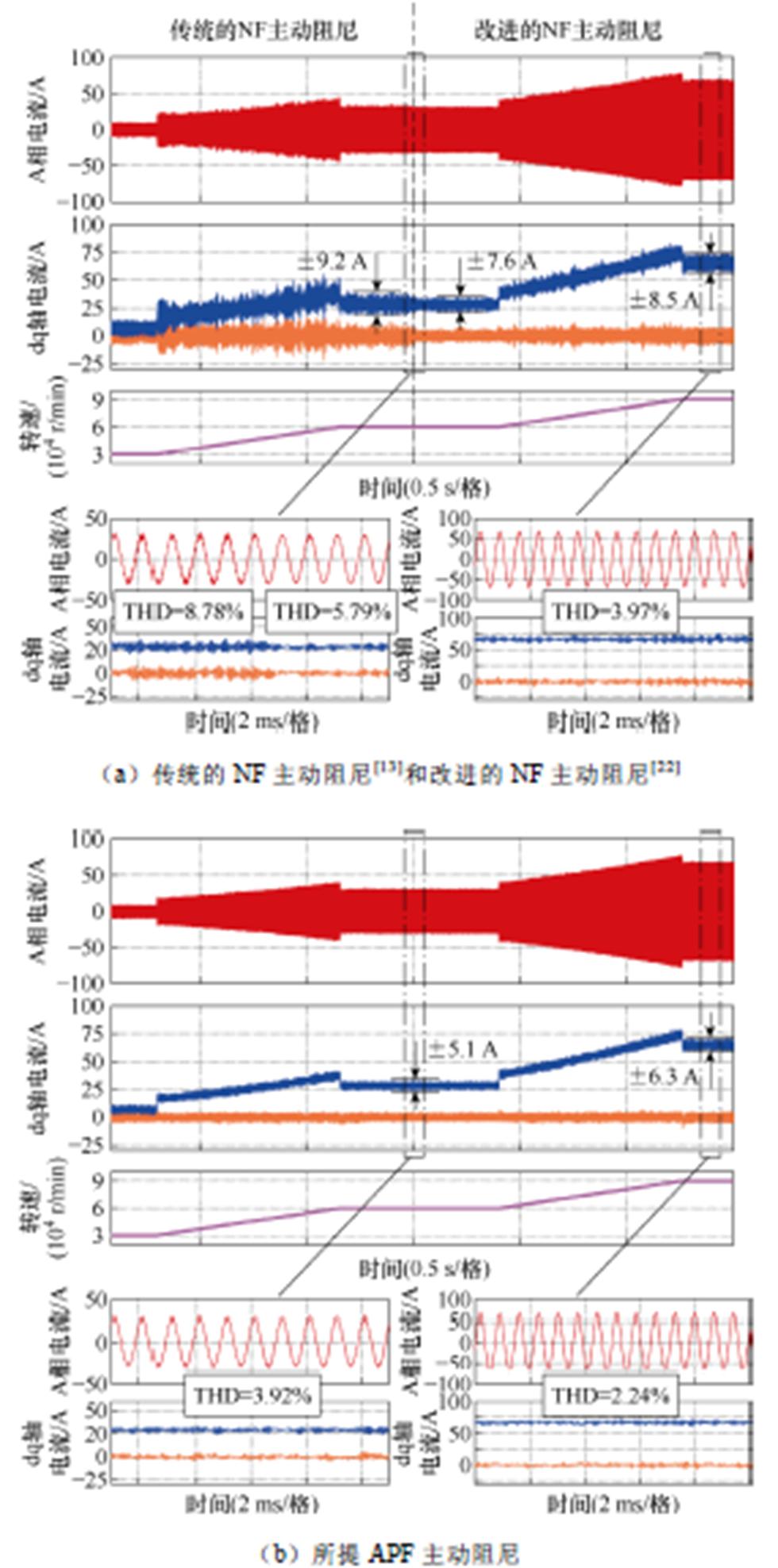
图20 滤波器主动阻尼全速域对比实验结果
Fig.20 Comparison experiment results of full speed range of active damping filter
图20a为文献[13]提出的传统NF主动阻尼算法与文献[22]提出的改进NF主动阻尼算法的切换对比实验过程。当采用传统的NF主动阻尼方法时,60 000 r/min的稳态电流纹波约为±9.2 A,稳态电流THD=8.78%;当切换为文献[22]提出的改进的NF主动阻尼算法后,相电流谐波得到了明显的抑制,60 000 r/min和90 000 r/min的稳态电流纹波分别约为±7.6 A和±8.5 A,稳态电流THD分别为5.79%和3.97%。图20b为本文所提APF主动阻尼算法,相较于改进的NF主动阻尼算法,APF主动阻尼算法的相电流波形更加平滑,电流谐波更小,60 000 r/min和90 000 r/min的稳态电流纹波分别约为±5.1 A和±6.3 A,稳态电流THD分别为3.92%和2.24%。
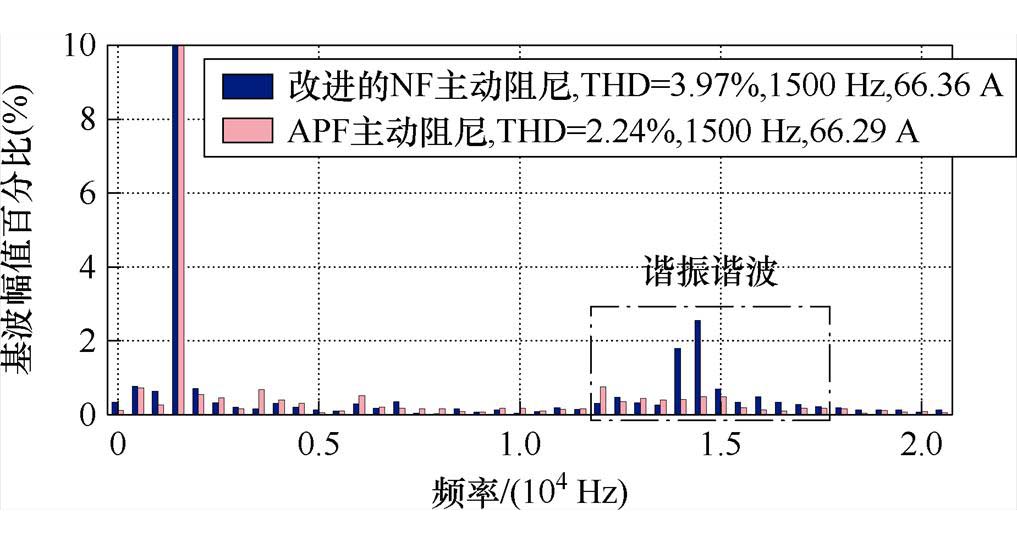
图21 滤波器主动阻尼90 000 r/min稳态电流FFT分析结果
Fig.21 90 000 r/min steady-state current FFT analysis results of active damping filter
实验结果表明,所提APF主动阻尼方法能够在转速大范围变化的工况下保持稳定,且相较于现有的滤波器主动阻尼算法,谐振频率及其附近的谐波电流的抑制效果更佳。
在进行参数鲁棒性实验时,由于无法直接改变电机以及LC滤波器的参数,故在参数失配的情况下,反向设计控制器的参数。例如,当 时,认为
时,认为 。r根据失配的系统参数由3.3节APF参数设计过程离线计算,并制作成一维查表储存在控制器中。图22展示了在全速域运行过程中,系统多个参数同时发生变化时,APF参数r、相电流、dq轴电流以及转速的实验结果。
。r根据失配的系统参数由3.3节APF参数设计过程离线计算,并制作成一维查表储存在控制器中。图22展示了在全速域运行过程中,系统多个参数同时发生变化时,APF参数r、相电流、dq轴电流以及转速的实验结果。
在图22a情况1中,首先将r设置为情况1计算的参数,系统稳定运行,60 000 r/min的稳态电流纹波约为±7.4 A,稳态电流THD=5.43%;随即将r设置为-1,由式(21)可知,此时 ,系统不提供主动阻尼作用,可以看出系统逐渐发散;立即将r切换为情况2计算的参数,系统迅速趋于稳定,稳态电流THD=4.34%,60 000 r/min和90 000 r/min的稳态电流纹波分别约为±5.5 A和±7.6 A。图22b中的情况3和情况4以相同方式进行实验。
,系统不提供主动阻尼作用,可以看出系统逐渐发散;立即将r切换为情况2计算的参数,系统迅速趋于稳定,稳态电流THD=4.34%,60 000 r/min和90 000 r/min的稳态电流纹波分别约为±5.5 A和±7.6 A。图22b中的情况3和情况4以相同方式进行实验。
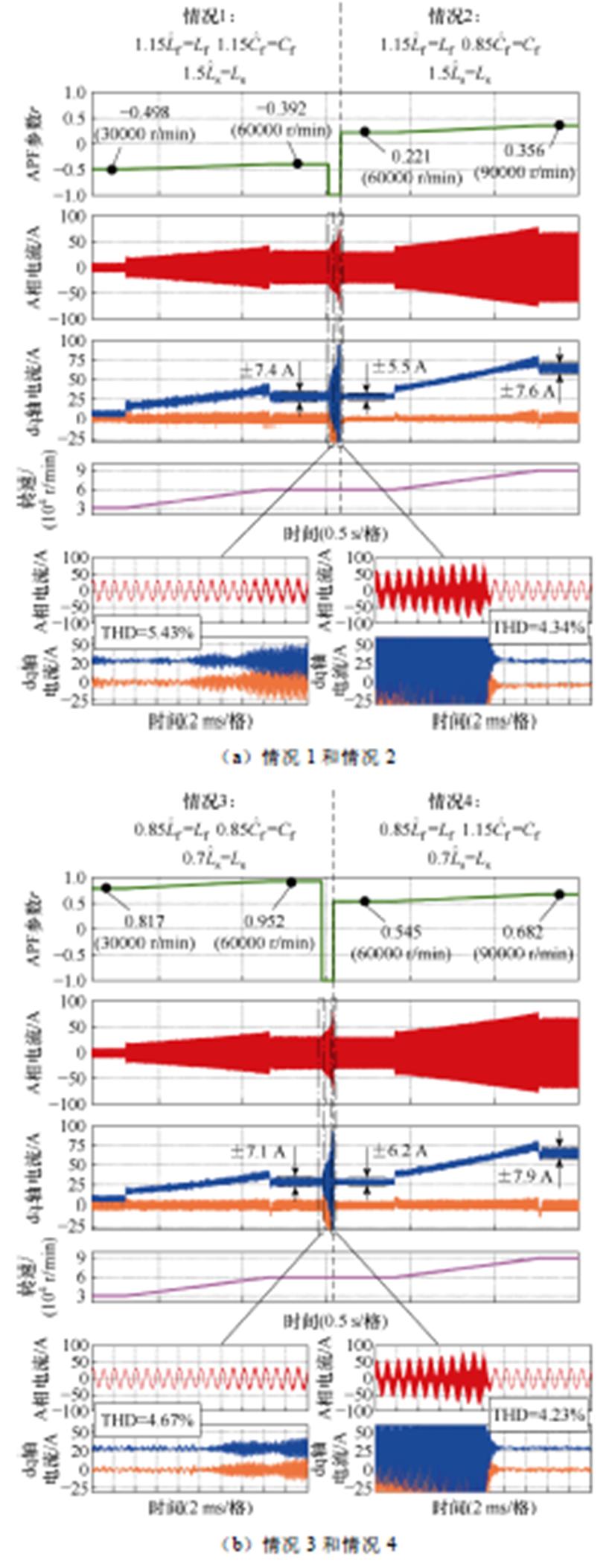
图22 全速域多参数鲁棒性实验结果
Fig.22 Experimental results of multi parameter robustness of full speed range
实验结果表明,所提主动阻尼方法具有良好的谐振抑制效果;并且当电机参数和LC滤波器参数同时变化一定范围时,系统仍保持稳定,所提方法具有良好的参数鲁棒性,能同时容忍LC滤波器±15%的参数误差和 电机电感参数误差。
电机电感参数误差。
针对逆变器侧电流反馈控制的LC-PMSM,本文提出了滤波器主动阻尼比较评估方法和控制器参数设计方法,理论分析和实验结果表明:
1)针对逆变器侧电流反馈,提出了一种分析滤波器主动阻尼谐振抑制性能的通用图解方法,并有效评估了不同滤波器对谐振频率漂移的鲁棒性。
2)提出了一种基于APF相频特性重塑的谐振抑制方法,不需要增加额外的传感器,仅需调整APF的滤波参数即可有效抑制LCL谐振。
3)所提方法在全速域下具有良好的参数鲁棒性,能够单独容忍电机电感参数±50%的误差,LC滤波器参数±20%的误差;能够同时容忍LC滤波器参数±15%的误差和 电机电感参数误差。
电机电感参数误差。
参考文献
[1] 罗力岩, 樊启高. 一种改进型永磁同步电机无模型预测电流控制策略[J]. 电工技术学报, 2025, 40(4): 1034-1045.
Luo Liyan, Fan Qigao. An improved model-free predictive current control strategy for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2025, 40(4): 1034-1045.
[2] 徐海, 米彦青, 王艳阳, 等. 带有参数在线辨识的永磁同步电机模型预测控制研究[J]. 电气传动, 2025, 55(2): 3-12.
Xu Hai, Mi Yanqing, Wang Yanyang, et al. Model predictive control study of permanent magnet synchronous motor with parameters online identi- fication[J]. Electric Drive, 2025, 55(2): 3-12.
[3] 陈瑞, 吴悠, 杜荣华, 等. 一种基于特征模型的永磁同步电机协调控制策略[J]. 电气工程学报, 2025, 20(1): 54-64.
Chen Rui, Wu You, Du Ronghua, et al. A coordinated control strategy for the permanent magnet syn- chronous motor based on the characteristic model[J]. Journal of Electrical Engineering, 2025, 20(1): 54-64.
[4] 刘刚, 张婧, 郑世强, 等. 基于参数在线辨识的高速永磁电机无差拍电流预测控制[J]. 电机与控制学报, 2023, 27(9): 98-108.
Liu Gang, Zhang Jing, Zheng Shiqiang, et al. Deadbeat predictive current control of high speed permanent magnet motor based on online parameter identification[J]. Electric Machines and Control, 2023, 27(9): 98-108.
[5] 佟文明, 杨先凯, 鹿吉文, 等. 双层永磁体结构高速永磁电机转子涡流损耗解析模型[J]. 电工技术学报, 2024, 39(20): 6293-6304.
Tong Wenming, Yang Xiankai, Lu Jiwen, et al. Rotor eddy current loss analytical model for high-speed permanent magnet motor based on double layer permanent magnet structure[J]. Transactions of China Electrotechnical Society, 2024, 39(20): 6293-6304.
[6] 郑长明, 董萱萱, 肖子语, 等. 基于虚拟电阻有源阻尼的LC滤波型永磁同步电机系统预测电流控制[J]. 电工技术学报, 2023, 38(22): 6059-6069.
Zheng Changming, Dong Xuanxuan, Xiao Ziyu, et al. Virtual resistance active damping based predictive current control of LC-filtered permanent magnet synchronous motor system[J]. Transactions of China Electrotechnical Society, 2023, 38(22): 6059-6069.
[7] 吕立傲, 胡存刚, 芮涛, 等. 基于无模型预测与无参数参考的LC型滤波逆变器三矢量预测控制方法[J]. 电工技术学报, 2025, 40(16): 5306-5316.
Lü Li’ao, Hu Cungang, Rui Tao, et al. Model-free prediction and parameter-less reference based on LC- filtered voltage source inverter triple-vector predi- ctive control[J]. Transactions of China Electrotech- nical Society, 2025, 40(16): 5306-5316.
[8] 李耀华, 王孝宇, 吴庭旭, 等. 带LC滤波器的永磁同步电机多步模型预测电流控制[J]. 电机与控制应用, 2024, 51(11): 21-31.
Li Yaohua, Wang Xiaoyu, Wu Tingxu, et al. Multi- step model predictive current control of permanent magnet synchronous motor with LC filter[J]. Electric Machines & Control Application, 2024, 51(11): 21- 31.
[9] Kukkola J, Hinkkanen M, Kai Zenger. Observer- based state-space current controller for a grid con- verter equipped with an LCL filter: analytical method for direct discrete-time design[J]. IEEE Transactions on Industry Applications, 2015, 51(5): 4079-4090.
[10] Parker S G, McGrath B P, Holmes D G. Regions of active damping control for LCL filters[J]. IEEE Transactions on Industry Applications, 2014, 50(1): 424-432.
[11] 吴翔, 李超, 刘志恒, 等. 带有LC正弦波滤波器的内置式永磁同步电机电流控制器谐振抑制参数设计[J]. 电工技术学报, 2023, 38(22): 6082-6093.
Wu Xiang, Li Chao, Liu Zhiheng, et al. Parameter design of the current controller for interior permanent magnet synchronous motor with LC sinusoidal filter to suppress resonance[J]. Transactions of China Electrotechnical Society, 2023, 38(22): 6082-6093.
[12] 周佳新, 姚宇, 彭飞, 等. 带LLCL滤波器的高速永磁同步电机低载波比电流阻尼控制器设计[J]. 中国电机工程学报, 2025, 45(19): 7743-7755.
Zhou Jiaxin, Yao Yu, Peng Fei, et al. Current damping controller for high-speed permanent magnet synchronous motor with LLCL filter in conditions with low carrier ratio[J]. Proceedings of the CSEE, 2025, 45(19): 7743-7755.
[13] Yao Wenli, Yang Yongheng, Zhang Xiaobin, et al. Design and analysis of robust active damping for LCL filters using digital Notch filters[J]. IEEE Transa- ctions on Power Electronics, 2017, 32(3): 2360- 2375.
[14] Yang Ming, Lü Zekai, Xu Donglin, et al. Resonance suppression and EMI reduction of GaN-based motor drive with sine wave filter[J]. IEEE Transactions on Industry Applications, 2020, 56(3): 2741-2751.
[15] Lü Zekai, Wu Lijian. Resonant frequency deviation analysis and modified Notch filter-based active damping for SiC-based PMSM drive with sine wave filter[J]. IEEE Transactions on Energy Conversion, 2023, 38(1): 417-427.
[16] Yao Wenli, Yang Yongheng, Xu Yan, et al. Phase reshaping via all-pass filters for robust LCL-filter active damping[J]. IEEE Transactions on Power Electronics, 2020, 35(3): 3114-3126.
[17] Mahafugur Rahman F M, Pirsto V, Kukkola J, et al. State-space control for LCL filters: converter versus grid current measurement[J]. IEEE Transactions on Industry Applications, 2020, 56(6): 6608-6618.
[18] Antivachis M, Niklaus P S, Bortis D, et al. Input/ output EMI filter design for three-phase ultra-high speed motor drive Gan inverter stage[J]. CPSS Transactions on Power Electronics and Applications, 2021, 6(1): 74-92.
[19] Bae B H, Sul S K. A compensation method for time delay of full-digital synchronous frame current regulator of PWM AC drives[J]. IEEE Transactions on Industry Applications, 2003, 39(3): 802-810.
[20] 胡寿松. 自动控制原理[M]. 7版. 北京: 科学出版社, 2019.
[21] 王奇维, 李斌兴, 潘冠丞, 等. 基于转子位置误差解耦阻抗建模的永磁同步电机电感在线辨识方法[J]. 电工技术学报, 2025, 40(2): 439-451.
Wang Qiwei, Li Binxing, Pan Guancheng, et al. Impedance model based online inductance identi- fication method of permanent magnet synchronous motor decoupled from rotor position error[J]. Transa- ctions of China Electrotechnical Society, 2025, 40(2): 439-451.
[22] Yao Yu, Xu Dingkuan, Chen Yansong, et al. Robust Notch filter-based active damping design for LCL- equipped high-speed PMSMs considering dual reso- nance problem[J]. IEEE Transactions on Industrial Electronics, 2024, 71(11): 13845-13854.
Abstract The small stator inductance of a high-speed permanent magnet synchronous motor (PMSM) results in significant phase current ripple due to pulse width modulation (PWM). Installing an LC filter at the inverter output can effectively suppress this adverse effect, forming an LC-filtered PMSM drive system (LC-PMSM). However, the LC filter and stator inductance can cause LCL resonance, which significantly affects system stability. Active damping is necessary to suppress resonance and stabilize the system.
The filter-based active damping method is widely used due to its simple structure and ease of parameter design. However, there is a lack of criteria for selecting, evaluating, and designing active damping filters. This paper proposes a general graphical method to assess the resonance-suppression performance of active damping filters for inverter-side current feedback in LC-PMSM systems. The robustness to resonance-frequency drift and the stability regions of the traditional notch filter (NF), low-pass filter (LPF), delay filter (DF), and all-pass filter (APF) are compared. Thus, the influence of filter-based active damping on system resonance phenomena is revealed. APF has the widest stability region and does not alter the system's amplitude-frequency characteristics, making it the most suitable for inverter-side current feedback control. Accordingly, this paper proposes a resonance suppression method by reshaping the phase-frequency characteristic. Furthermore, using a discrete- domain transfer function model and stability margin indices, a detailed parameter design approach for the APF is presented.
Simulations and experiments were conducted. Simulation results show that compared with NF, LPF, and DF active damping, the proposed APF active damping method maintains stability across the whole speed range under parameter variations. Experimental results show that the proposed APF active damping method maintains stability under large-scale speed variations. It exhibits better harmonic current suppression at the resonant frequency than existing filter-based active damping methods, with lower total harmonic distortion (THD) and lower current ripple. Multi-parameter robustness analysis shows that the unstable system rapidly stabilizes after APF active damping and remains stable across the speed range when multiple LC-PMSM parameters are simultaneously varied. The tolerating individual deviations are ±50% in motor inductance and ±20% in LC filter parameters. Moreover, it can simultaneously accommodate combined variations of ±15% in LC filter parameters and (-30% to +50%) in motor inductance parameters.
The following conclusions can be drawn. (1) For inverter side current feedback, the proposed general graphical method effectively evaluates the robustness to resonance frequency drift and stability regions of different active damping filters. (2) The proposed resonance suppression method based on APF phase-frequency characteristic reshaping requires no additional sensors and effectively suppresses LCL resonance by adjusting the APF parameters only. (3) At the whole speed range, the proposed method exhibits good parameter robustness, tolerating simultaneous variations in multiple system parameters.
Keywords:High-speed permanent magnet synchronous motor, LC filter, resonance suppression, all-pass filter, single inverter current feedback
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.250356
浙江省2025年度“尖兵领雁+X”科技计划资助项目(2025C01199(SD2))。
收稿日期 2025-03-07
改稿日期 2025-03-25
朱 元 男,1976年生,博士,副教授,研究方向为汽车电子嵌入式软件、车用永磁同步电机控制。
E-mail: yuan.zhu@tongji.edu.cn
孟 令 男,1999年生,博士研究生,研究方向为高速电机控制。
E-mail: 2111311@tongji.edu.cn(通信作者)
(编辑 崔文静)