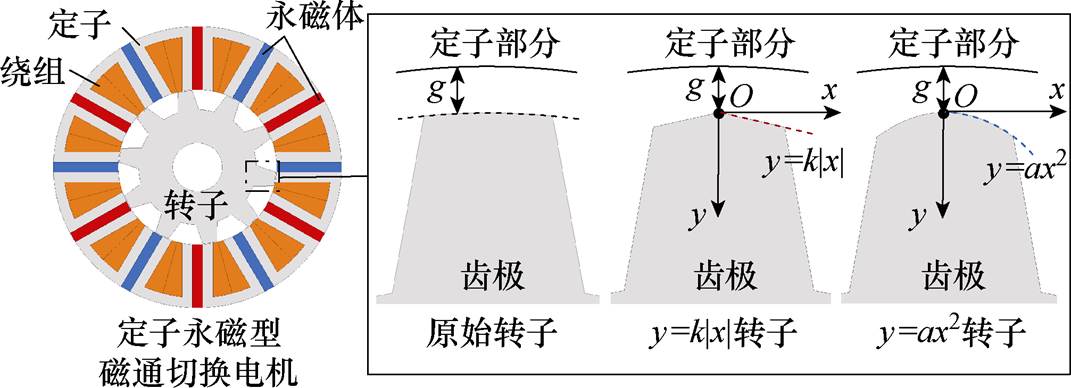
图1 12槽/10极SPM-FS电机结构及函数型转子示意图
Fig.1 Schematic diagram of 12-slot/10-pole SPM-FS machine and functional rotor structures
摘要 定子永磁型磁通切换(SPM-FS)电机因其具有转子结构简单、可靠性高、永磁体易于冷却等优点,在电动汽车、轨道交通等领域应用潜力巨大。然而,因其特殊的双凸极结构,该类型电机齿槽转矩较大。针对此问题,该文提出了转子齿顶外轮廓线分别符合y=k|x|和y=ax2函数分布的两种函数型转子SPM-FS电机,对比未经转子齿顶修型的原始转子电机,开展了不同转子结构电机的磁场调制机理和性能对比分析。首先,介绍了函数型转子电机结构和关键参数对性能的影响关系。其次,基于气隙磁场调制理论分析了函数型转子电机的磁场调制机理,揭示了其齿槽转矩和转矩脉动抑制机理。然后,对比分析了不同转子结构电机的反电动势、转矩、损耗等性能。最后,加工并测试了两种函数型转子电机,验证了理论分析的正确性和函数型转子齿槽转矩抑制的有效性。
关键词:定子永磁 磁通切换 磁场调制 齿槽转矩 转矩脉动
永磁电机因其转矩密度大、效率高和结构紧凑等优点,在伺服、发电和电力推进等领域得到了广泛应用[1-4]。作为永磁电机的重要分支,定子永磁型磁通切换(Stator Permanent Magnet-Flux Switching, SPM-FS)电机因其具有转子结构简单、可靠性高、永磁体易于冷却等优点[5-8],近年来受到了国内外学者的广泛关注,且在电动汽车、飞轮储能和轨道交通等领域具有广阔的应用前景[9-10]。然而,受SPM-FS电机双凸极结构特点影响,该类型电机的齿槽转矩和转矩脉动较大[11-12]。针对该问题,国内外学者从电机本体的角度出发,提出了如电机参数优化、斜极、转子修型、开辅助槽等齿槽转矩抑制措施,并取得了较好的效果[13]。
从SPM-FS电机本体结构上,主要可通过定子侧、转子侧或定、转子结构组合调整来抑制齿槽转矩。在定子侧,通常可采用斜槽、定子多齿结构、定子开辅助槽、定子齿修型等方法抑制齿槽转矩[13]。文献[14-15]分别针对定、转子不同齿顶修型组合及定、转子不同开辅助槽组合分析了齿槽转矩抑制效果。在转子侧,文献[16-18]分别提出转子斜极、转子分段斜极、不对称转子等方法开展齿槽转矩抑制研究。上述针对定子或定、转子组合结构调整的方法虽然具有较好的齿槽转矩抑制效果,但SPM-FS电机因永磁体位于定子,具有结构复杂、加工困难等缺点。因此,通过调整转子结构来抑制齿槽转矩是相对简单且易于实际应用的方式[13]。
综上所述,通过转子侧结构调整的方法具有结构简单、易于加工、齿槽转矩抑制效果较好等优点,但同时也不可避免地存在齿槽转矩抑制和平均转矩下降的矛盾。文献[19]基于气隙磁场调制理论提出了一种12槽/10极余弦型转子SPM-FS电机,在平均转矩损失较小的同时具有较好的齿槽转矩及转矩脉动抑制效果。进一步地,文献[20]提出函数型转子SPM-FS电机概念,并重点分析了加工误差对不同函数型转子结构电机的性能影响。但文献[20]缺乏对函数型转子的磁场调制机理及不同转子的性能对比分析。本文以受加工误差影响相对较小的y=k|x|型和y=ax2型两类函数型转子SPM-FS电机为研究对象,并通过对比未修型的原始转子电机,综合分析了不同函数型转子SPM-FS电机的磁场调制机理和性能。
首先,介绍了函数型转子SPM-FS电机的结构及参数,分析了函数型转子关键参数与电机齿槽转矩、平均转矩等性能的影响关系。其次,对函数型转子SPM-FS电机的气隙磁场调制机理、齿槽转矩产生及其抑制机理等进行了分析。然后,对不同转子结构SPM-FS电机的反电动势、转矩、损耗等性能进行了综合对比分析。最后,加工了两种函数型转子SPM-FS电机样机并进行了实验验证。
图1所示为12槽/10极SPM-FS电机结构及函数型转子示意图。由图可知,SPM-FS电机由凸极定子与凸极转子组成,永磁体位于各U型模块化定子铁心中间。通常情况下,凸极转子所有齿极的外轮廓线为同心圆,外轮廓线与定子部分的间距(即气隙长度g)处处相等(即原始转子的结构特点)。区别于原始转子,本文所研究的函数型转子对凸极转子的齿极进行了修型。具体修型方式如下:以原始转子齿顶外形轮廓线中点为原点,建立局部xOy坐标系,针对不同函数型转子,分别绘制顶点经过O点,且以y轴为对称轴的函数曲线,不同函数型转子对应的函数曲线表达式如式(1)所示。可见,在不考虑定子开槽的影响时,函数型转子仅在齿极顶点与定子部分的间距等于气隙长度g,其余部分则不同。
图1 12槽/10极SPM-FS电机结构及函数型转子示意图
Fig.1 Schematic diagram of 12-slot/10-pole SPM-FS machine and functional rotor structures
 (1)
(1)
式中,k、a为参数,两种函数型转子的齿极结构参数分别受k和a影响。因此,为确定k和a的具体大小,采用有限元法对电机平均转矩、齿槽转矩等关键性能随参数k和a的变化进行分析。图2所示为以y=k|x|型转子为例,电机转矩脉动、齿槽转矩、平均转矩和等效转矩脉动降低系数Ll随参数k的变化曲线。其中,转矩脉动Tripple和Ll表达式为
 (2)
(2)
式中,Tmax、Tmin、Taverage分别为一个平稳周期内转矩最大值、最小值和平均值;Tp-p为转矩峰峰值;Krl为转矩脉动降低率;KTl为转矩降低率;Tripple-f、Tf分别为当前函数型转子结构SPM-FS电机的转矩脉动和平均转矩;Tripple-o、To分别为原始转子结构SPM-FS电机的转矩脉动和平均转矩。
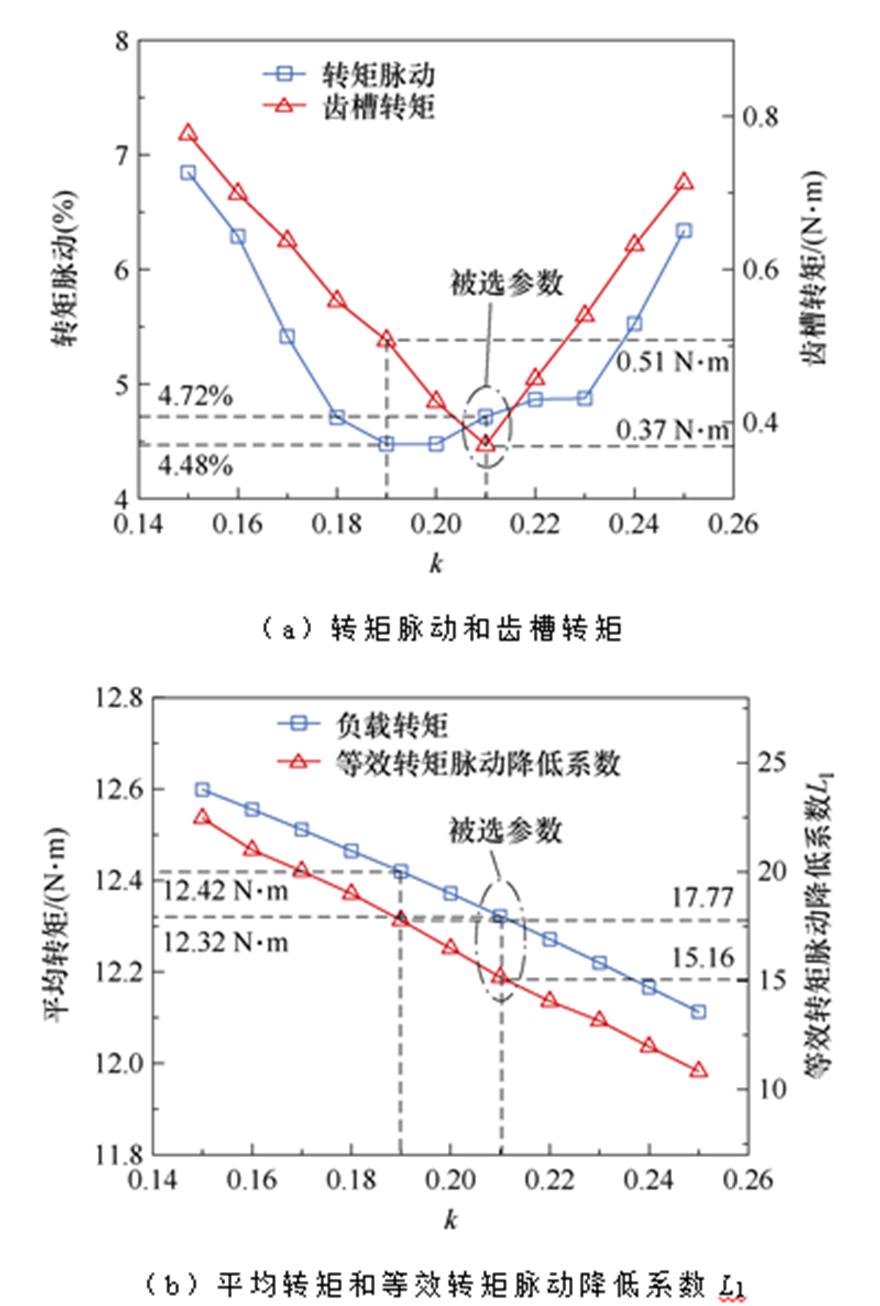
图2 y=k|x|型转子电机性能随参数k变化
Fig.2 Performances variation curves of y=k|x| rotor machine versus parameter k
由图2a可知,y=k|x|型转子SPM-FS电机的转矩脉动和齿槽转矩随着k的增加呈现先减小后增大的趋势。其中,k=0.19时转矩脉动最小(4.48%),k=0.21时齿槽转矩最小(0.37 N·m)。由图2b可知,y=k|x|型转子电机的平均转矩和Ll随着k的增大不断减小。结合图2a和图2b中不同性能随k的变化曲线,y=k|x|型转子中k的取值范围可为0.19~0.21。为获得较好的齿槽转矩、转矩脉动抑制效果,同时综合考虑平均转矩和Ll,本文中取k=0.21。图3进一步分析了不同齿宽下y=k|x|型转子电机性能随参数k的变化。可见,不同齿宽下,齿槽转矩和转矩脉动最小位置对应的k值不同,进而影响参数k的选取。需要说明的是,受饱和程度不同的影响,不同结构参数下SPM-FS电机的参数k和a的选取会发生变化,但仍可参考图2所示的单参数扫描方法进行选取。y=ax2型转子SPM-FS电机的参数a可采用类似的方法进行确定[20],不再赘述。
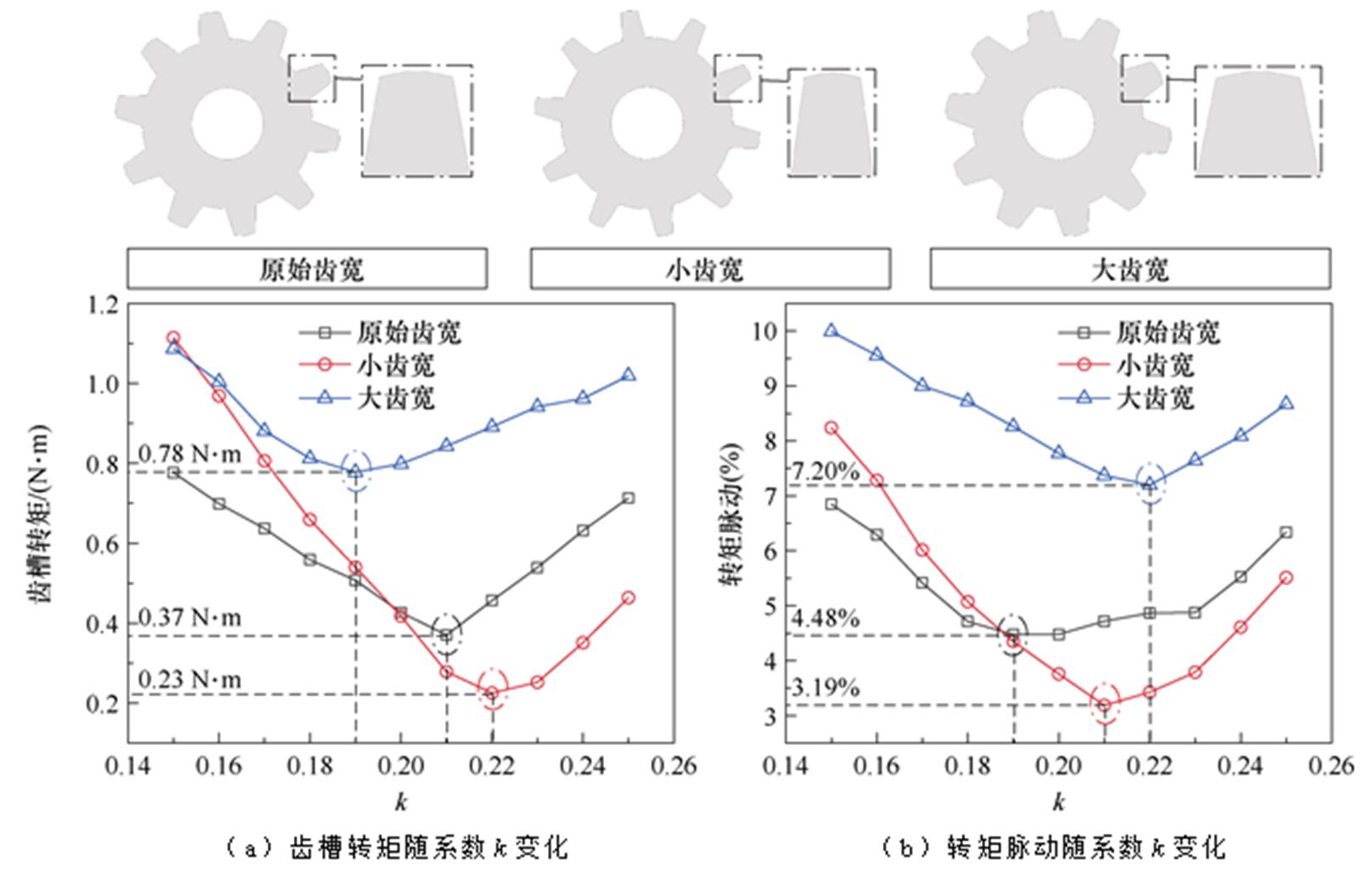
图3 y=k|x|型转子电机不同齿宽下性能随参数k变化
Fig.3 Performances variation curves of y=k|x| rotor machine versus parameter k under different tooth widths
为公平比较上述两种函数型转子与原始转子结构的SPM-FS电机性能,本文中的三台12槽/10极电机具有相同的定子结构,且除凸极转子的齿极结构外,其他参数均保持一致,见表1[20]。
表1 12槽/10极SPM-FS电机参数
Tab.1 Key parameters of three 12-slot/10-pole SPM-FS machines
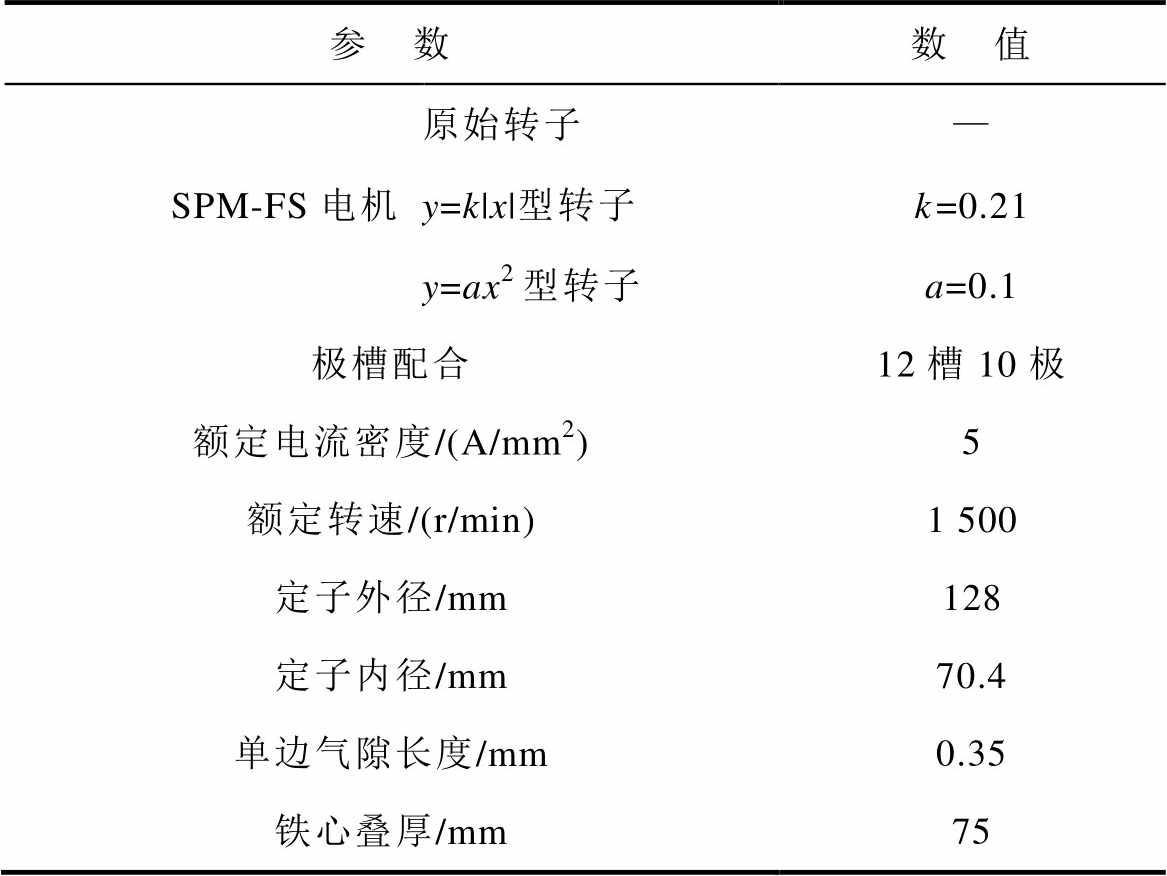
参 数数 值 SPM-FS电机原始转子— y=k|x|型转子k=0.21 y=ax2型转子a=0.1 极槽配合12槽10极 额定电流密度/(A/mm2)5 额定转速/(r/min)1 500 定子外径/mm128 定子内径/mm70.4 单边气隙长度/mm0.35 铁心叠厚/mm75
本小节对原始转子及不同函数型转子SPM-FS电机的磁场调制机理进行了分析。基于气隙磁场调制理论,分析了函数型转子对齿槽转矩及转矩脉动的抑制机理。
图4所示为SPM-FS电机气隙磁场调制机理示意图。由气隙磁场调制理论可知,SPM-FS电机的永磁体、定/转子铁心、电枢绕组根据其在电机机电能量转换中所起到的作用可分别等效为励磁源、调制器和滤波器[21-23]。励磁源产生的初始永磁磁场通过定子/转子铁心调制器的作用产生经过调制的气隙磁场,再通过滤波器(绕组)对有效谐波的提取,进而综合作用输出反电动势、电磁转矩等性能。图4中,Fpm(q)为永磁体初始磁动势,Ms(q)为定子调制函数,Mr(q, t)为转子调制函数,Wc(q)为绕组 函数。
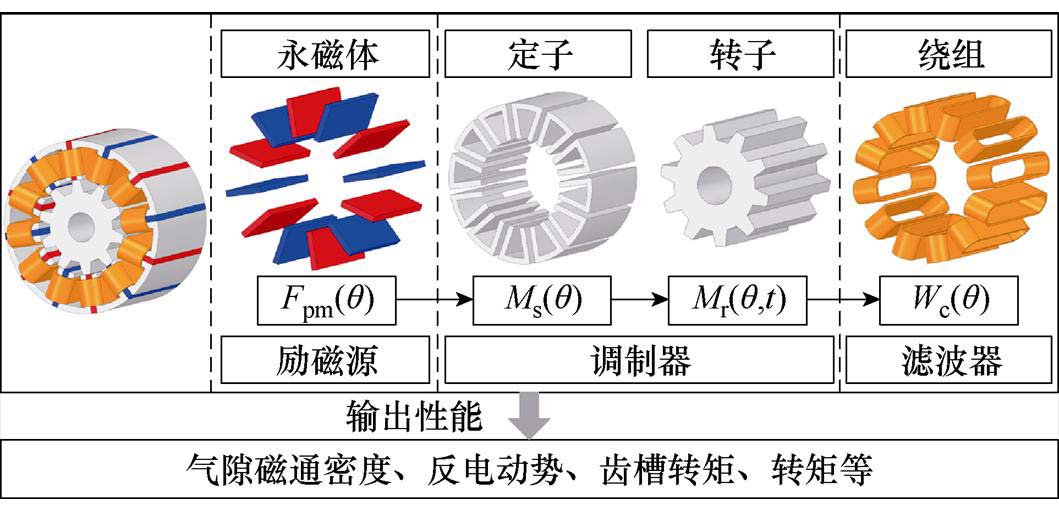
图4 SPM-FS电机气隙磁场调制机理
Fig.4 Air gap magnetic field modulation mechanism of SPM-FS machine
根据气隙磁场调制理论,SPM-FS电机的空载气隙磁通密度表达式[23]为
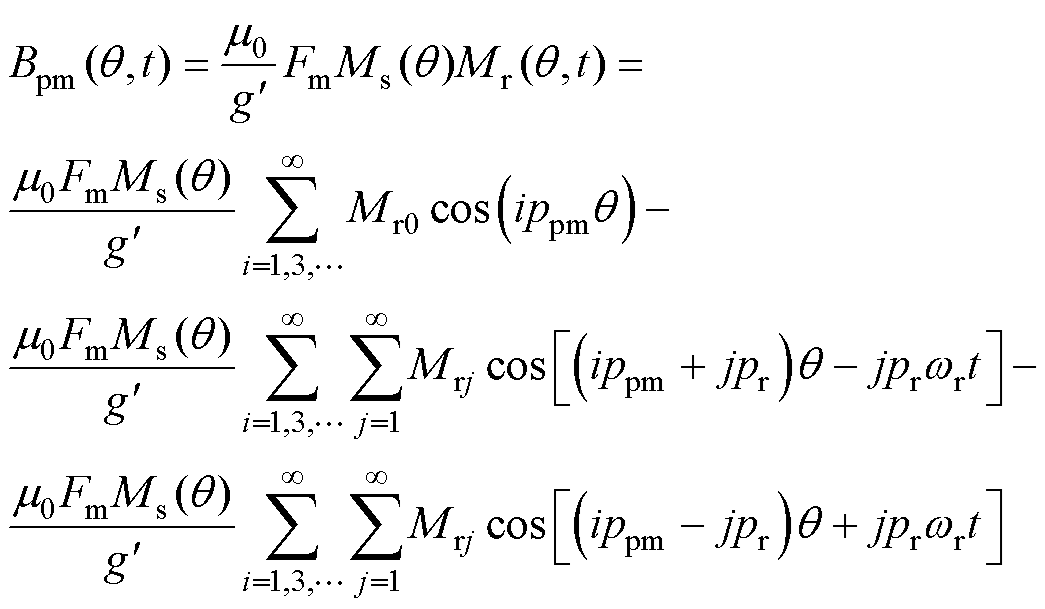 (3)
(3)
式中,ppm为定子永磁体极对数;pr为转子极(齿)数;q为圆周方向位置角;t为时间;m0为真空磁导率; 为等效气隙单边长度;Fm为永磁体初始励磁磁动势谐波幅值;Mr0和Mrj分别为转子调制函数直流分量及转子调制函数谐波幅值;wr为转子机械转速;i和j为谐波的调制系数。其中,转子调制函数表达式为
为等效气隙单边长度;Fm为永磁体初始励磁磁动势谐波幅值;Mr0和Mrj分别为转子调制函数直流分量及转子调制函数谐波幅值;wr为转子机械转速;i和j为谐波的调制系数。其中,转子调制函数表达式为
 (4)
(4)
由空载气隙磁通密度表达式可知,SPM-FS电机的气隙磁通密度同时受定子/转子铁心调制器的影响。其中,具有动态变化特点的凸极转子调制器在不同谐波调制系数i和j的综合作用下,使得SPM- FS电机产生丰富的空间及时间谐波,进而影响齿槽转矩、转矩脉动等性能。
对于SPM-FS电机,受定子/转子铁心的齿槽影响,存储在气隙中的能量分布不均,在定转子相对位置发生变化时,磁场能量会发生变化,进而产生齿槽转矩[13]。根据磁共能法,SPM-FS电机的齿槽转矩表达式可以表示[13]为
 (5)
(5)
式中,W为磁场能量;qm为定、转子间的相对机械位置角。
通过麦克斯韦张量法可得SPM-FS电机的电磁转矩表达式及其各次谐波表达式为
 (6)
(6)
式中,Te(t)为电磁转矩;Te-v(t)为电磁转矩v次谐波;Br(q, t)、Bt(q, t)分别为径向、切向气隙磁通密度;Br-v(t)、Bt-v(t)分别为径向、切向气隙磁通密度v次谐波;qr-v(t)、qt-v(t)分别为径向、切向气隙磁通密度v次谐波相位;rg为气隙半径;Lr为定子叠厚。
通过式(6)可知,电磁转矩及转矩脉动由电磁转矩所有次谐波累加得到。进而,v次谐波内的转矩脉动表达式可以表示为
 (7)
(7)
 (8)
(8)
式中, 、
、 、
、 分别为前v次谐波电磁转矩之和的最大、最小、平均值。
分别为前v次谐波电磁转矩之和的最大、最小、平均值。
通过上述分析可知,齿槽转矩和转矩脉动受由转子调制函数造成的气隙磁通密度谐波分量影响。下面将对不同转子结构的气隙磁通密度、齿槽转矩谐波及转矩脉动进行分析。
图5所示为不同转子结构的转子调制函数示意图。可以看出,原始转子的调制函数在齿部区域为平顶波,造成原始转子SPM-FS电机具有较高的谐波含量。而y=k|x|型与y=ax2型两种函数型转子结构通过对转子齿极修型,改善了转子调制函数波形,波形由平顶波趋近于正弦波。
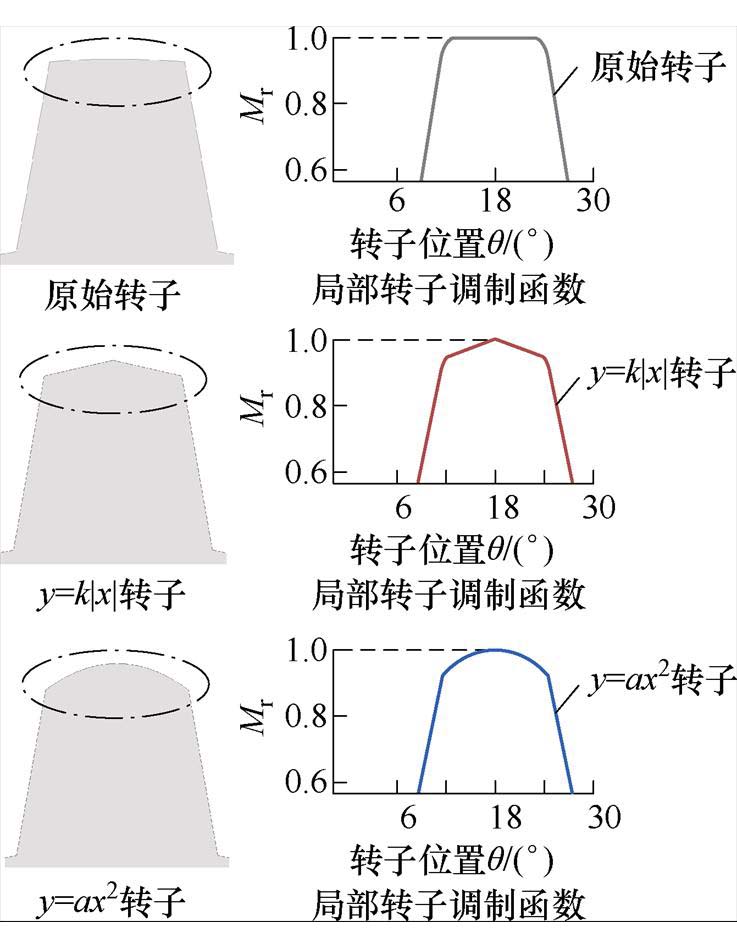
图5 不同转子结构的转子调制函数
Fig.5 Rotor modulation functions of different rotor structures
由式(3)可知,通过改善转子调制函数可影响气隙磁通密度的谐波含量。图6所示为空载气隙磁通密度波形及其谐波分布。可见,三种转子结构SPM-FS电机的主要谐波分量为4、6、8、16、18、28次谐波(由调制系数i=1、3和j=1组合调制)。y=k|x|型与y=ax2型两种函数型转子电机与原始转子电机相比,除降低了空载气隙磁通密度低次谐波含量外,同时大幅降低了如40、44、56和68次等对齿槽转矩具有贡献的高次谐波。需要注意的是,齿槽转矩不仅仅与某一定转子相对位置的径向气隙磁通密度谐波分布有关,后面将结合齿槽转矩的谐波分布进行分析。
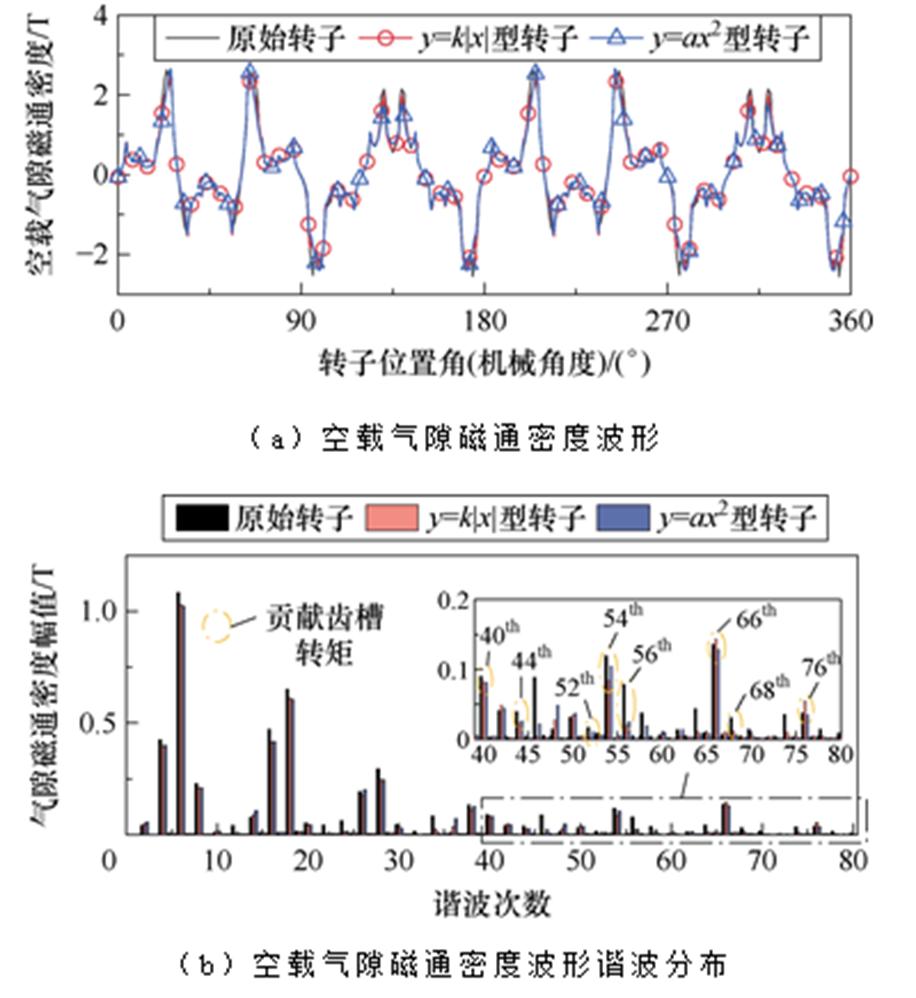
图6 空载气隙磁通密度波形及其谐波分布
Fig.6 Waveforms and harmonics distribution of no-load air-gap flux density
图7所示为额定电流(3.5 Arms)下的负载气隙磁通密度波形及其谐波分布。可以看出,三种转子结构SPM-FS电机的负载和空载气隙磁通密度谐波分布类似。以y=ax2型转子电机为例,其4、6、8、16、18、28次谐波幅值(对转矩平均值有主要贡献)与原始转子电机相比分别减小了6.60%、5.58%、9.16%、10.14%、8.72%、18.15%。而40、44、54、56、68、76次谐波幅值(对齿槽转矩及转矩脉动具有主要贡献),与原始转子电机相比分别减小了8.30%、59.42%、4.85%、29.91%、82.77%、41.23%。
因此,y=ax2型转子SPM-FS电机对气隙磁通密度高频谐波具有较好的抑制作用。
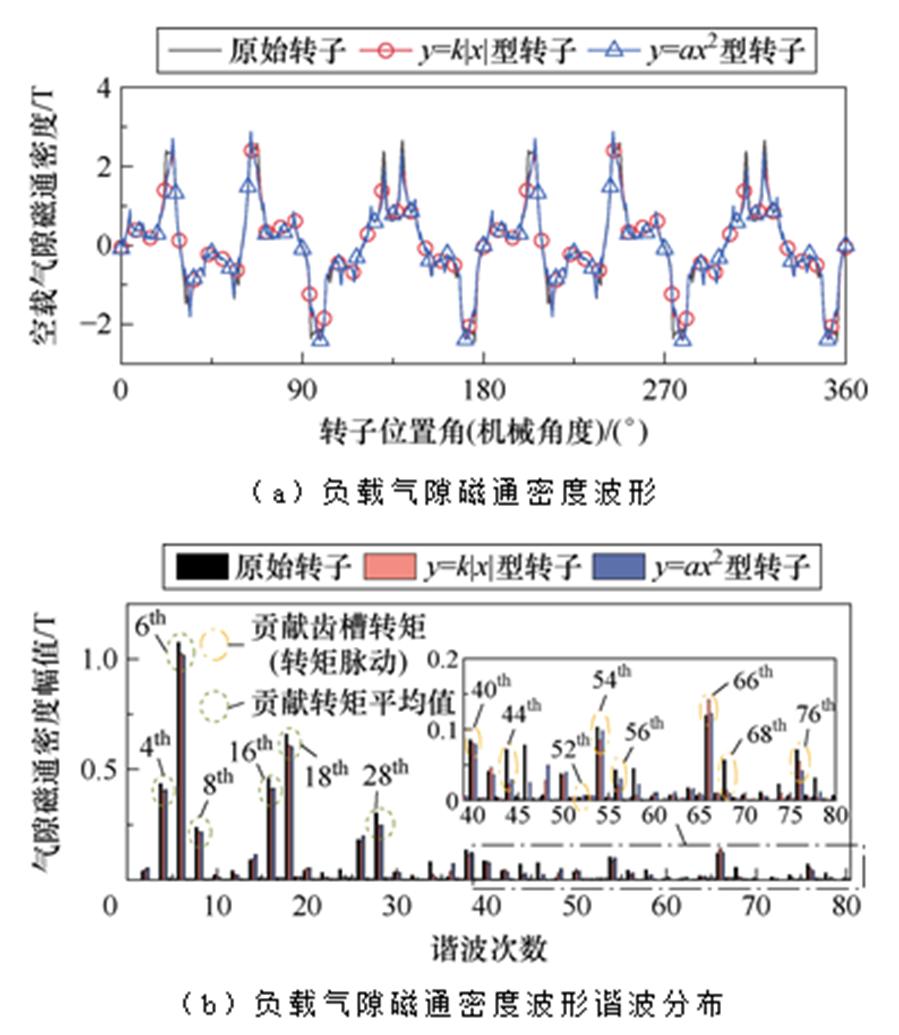
图7 额定工况负载气隙磁通密度及其谐波分布
Fig.7 Waveforms and harmonics distribution of on-load air-gap flux density at rated condition
图8所示为三种转子结构SPM-FS电机的齿槽转矩谐波分布。其中,正值与负值分别意味着对齿槽转矩起正贡献和负贡献。可见,原始转子齿槽转矩40~76次谐波间的高次谐波幅值较大。与原始转子相比,两种函数型转子电机的多数谐波次数幅值均较低,特别是y=ax2型转子SPM-FS电机。其中,y=k|x|型转子的54次齿槽转矩谐波含量较大,但该电机同时具有幅值较大且起负贡献的66次谐波,两类谐波可相互抵消。原始转子、y=k|x|型转子、y=ax2型转子电机的前76次主要谐波齿槽转矩之和分别为1.73 N·m、419.51 mN·m、58.18 mN·m。两种函数型转子与原始转子电机相比均可大幅降低齿槽转矩(y=k|x|型转子齿槽转矩降低75.75%,y=ax2型转子齿槽转矩降低约96.94%)。
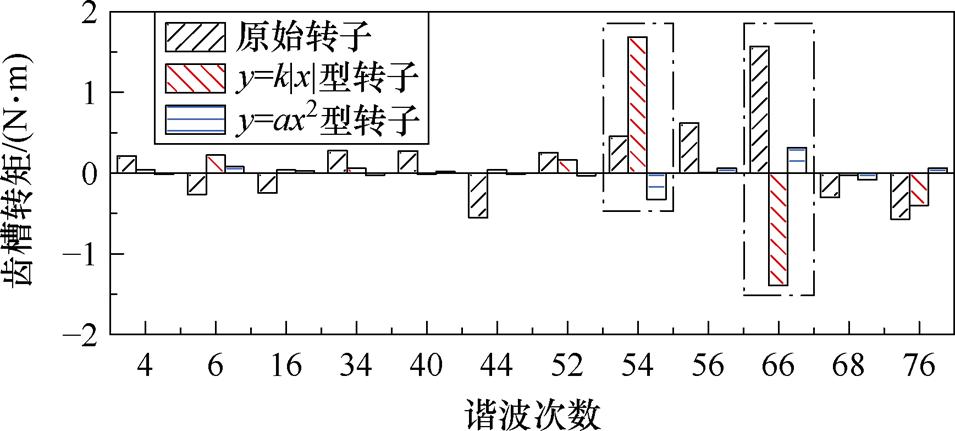
图8 齿槽转矩谐波分析
Fig.8 Analysis of cogging torque harmonics
图9所示为三种转子结构SPM-FS电机额定工况(1 500 r/min,3.5 Arms)下的转矩主要谐波幅值。可见,原始转子、y=k|x|型转子、y=ax2型转子电机的4、6、8、16、18、28次转矩谐波幅值之和分别为13.61、12.53、12.71 N·m,与各电机总转矩平均值的差值分别仅为4.37%、1.70%、2.33%,表明由调制系数i=1、3和j=1组合调制出的4、6、8等低次转矩谐波对总转矩平均值起主要贡献。与原始转子SPM-FS电机相比,y=k|x|型转子、y=ax2型转子电机的主要转矩谐波幅值之和分别降低了7.94%和6.61%。结果表明,两种函数型转子结构电机在降低齿槽转矩的同时也降低了平均转矩,但平均转矩降低率远低于齿槽转矩降低率。
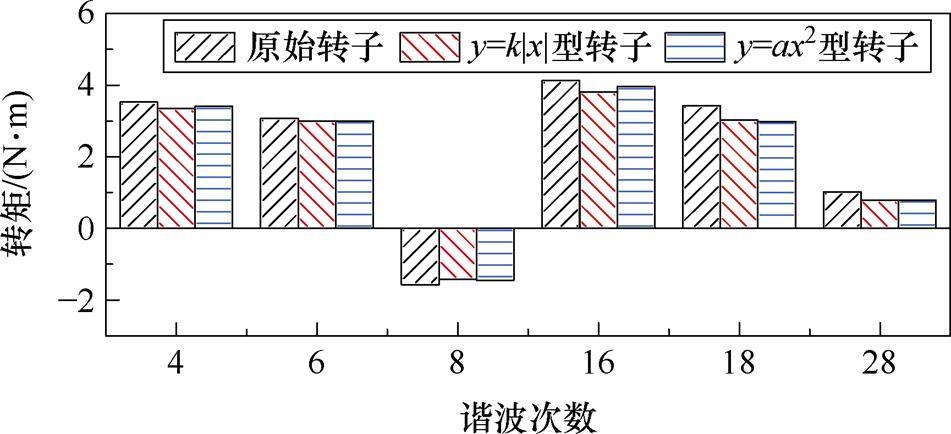
图9 额定工况转矩谐波分析
Fig.9 Analysis of torque harmonics at rated condition
为进一步分析函数型转子对转矩脉动的抑制效果,结合式(7)对额定转矩脉动不同谐波次数内的转矩脉动进行了分析,如图10所示。可见,原始转子电机的转矩脉动在前52次谐波内的变化较小且脉动较小,在前52~76次内转矩脉动增加较多,与齿槽转矩谐波分布基本一致。结果进一步表明,齿槽转矩和转矩脉动受气隙磁通密度高次谐波影响较大。图10同时表明了两种函数型转子对各次谐波内的转矩脉动具有较好的抑制效果。其中,y=k|x|型转子电机在前64次谐波的转矩脉动较大,但在图8所示的66次负贡献齿槽转矩作用下,y=k|x|型转子电机的前76次谐波的转矩脉动大幅降低。与原始转子电机相比,y=k|x|型转子、y=ax2型转子电机的转矩前76次谐波转矩脉动分别由20.09%降低至3.43%及2.77%,验证了函数型转子对转矩脉动抑制的有效性。
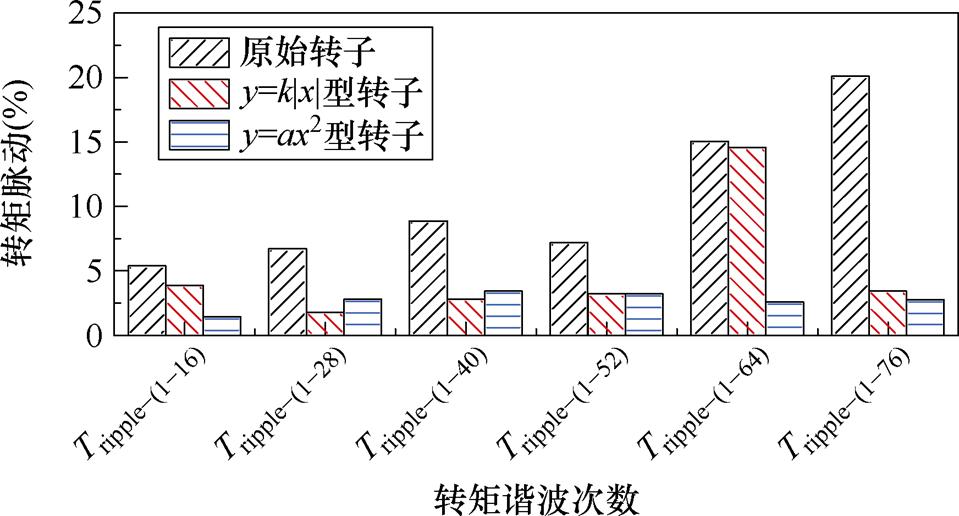
图10 额定转矩脉动分析
Fig.10 Analysis of torque ripple at rated condition
通过对三种转子结构SPM-FS电机气隙磁通密度、齿槽转矩和转矩谐波进行分析,可知由调制系数i=1、3和j=1组合调制出的4、6、8等低次谐波对转矩平均值起主要贡献,40~76次等高次谐波对齿槽转矩及转矩脉动起主要贡献。y=k|x|型转子和y=ax2型转子通过对转子调制器进行修改,改善了转子调制函数,进而改善了气隙磁通密度高次谐波分布。其中,y=ax2型转子电机的齿槽转矩40~76次高次谐波抑制明显,从而降低了齿槽转矩。y=k|x|型转子电机齿槽转矩除54、66次谐波外的谐波含量抑制明显,54、66次齿槽转矩谐波相位相反可相互抵消,从而降低了齿槽转矩。转矩脉动主要受齿槽转矩影响,因此两种函数型转子具有较好的转矩脉动抑制效果。
本小节基于二维有限元法综合对比了原始转子、y=k|x|型转子、y=ax2型转子三种结构SPM-FS电机的反电动势、齿槽转矩、转矩、损耗等性能。
图11所示为三种SPM-FS电机在额定转速1 500 r/min下的空载反电动势波形及其谐波分布对比。由图11a可知,y=k|x|型转子和y=ax2型转子电机的空载反电动势峰值为263.94 V与266.14 V,与原始转子电机的277.95 V相比分别降低了5.04%及4.25%。由图11b可见,受函数型转子气隙磁通密度1次时间谐波及高次时间谐波含量降低影响,y=k|x|型转子和y=ax2型转子电机的空载反电动势基波、3、5及7次谐波幅值与原始转子相比均呈现不同程度降低。其中,y=k|x|型转子和y=ax2型转子电机的基波幅值为265.25 V和265.96 V,与原始转子电机的基波幅值(280.20 V)相比,分别降低了5.34%和5.08%。在高次谐波方面,y=k|x|型转子电机空载反电动势3、5、7谐波与原始转子电机相比分别降低了32.61%、48.63%、63.21%。y=ax2型转子SPM-FS电机空载反电动势3、5、7谐波与原始转子电机相比分别降低了45.86%、78.55%、90.26%。因此,函数型转子SPM-FS电机具有较小的空载反电动势总谐波畸变率(Total Harmonic Distortion, THD)。原始转子、y=k|x|型转子、y=ax2型转子三种电机的空载反电动势THD分别为1.38%、0.61%、0.49%。
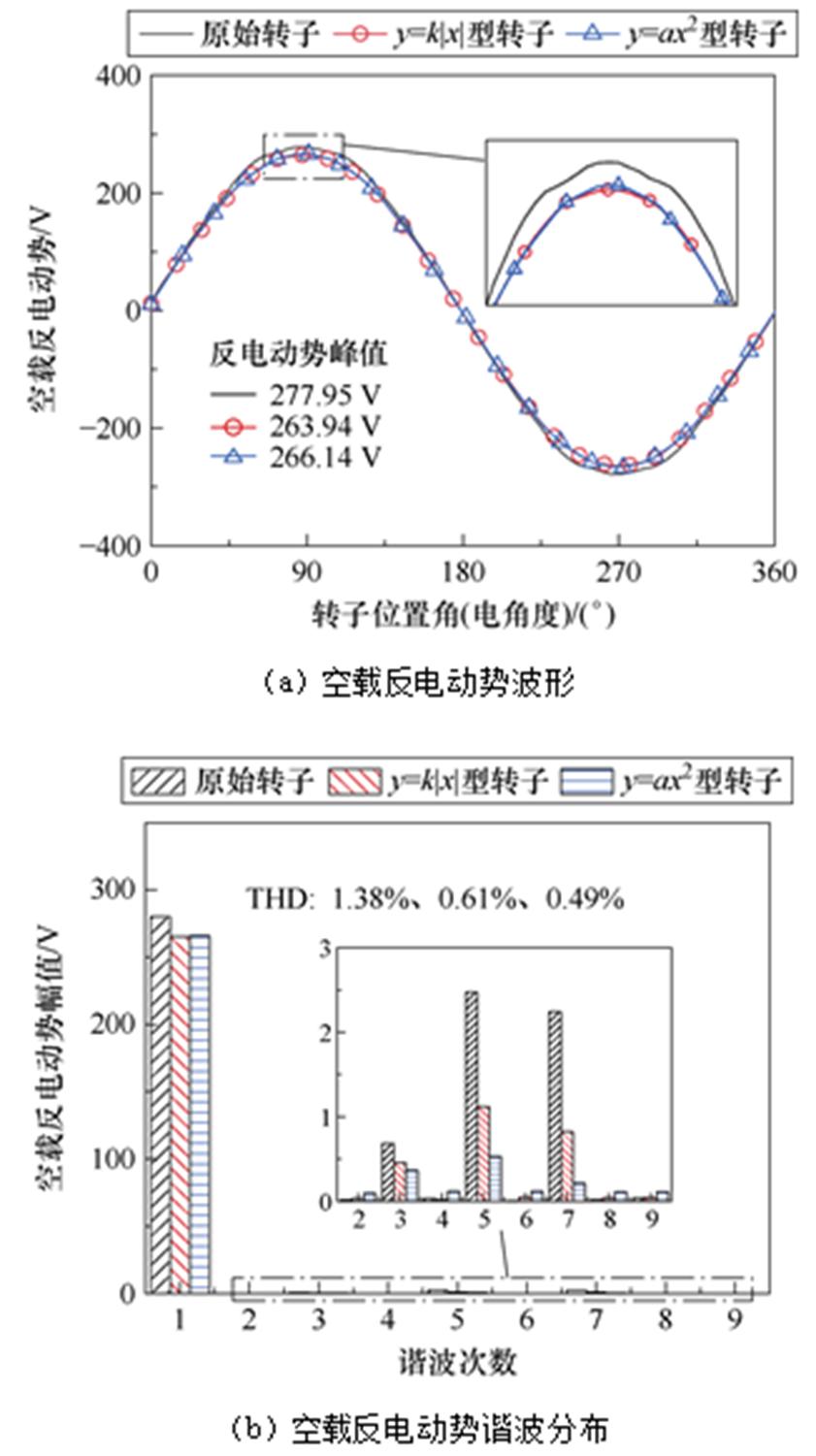
图11 额定转速空载反电动势对比分析
Fig.11 Comparative analysis of no-load back electromotive force at rated speed
通过对三种转子结构SPM-FS电机空载反电动势的对比分析,相较于y=k|x|型转子,y=ax2型转子SPM-FS电机在空载反电动势基波幅值较大的同时,空载反电动势THD更小。
三种转子结构SPM-FS电机36°机械角度范围内的齿槽转矩如图12所示。y=k|x|型转子和y=ax2型转子SPM-FS电机的齿槽转矩峰峰值为364.16 mN·m和52.02 mN·m,与原始转子电机相比,分别降低了88.15%及98.31%,验证了上述齿槽转矩机理分析的正确性。
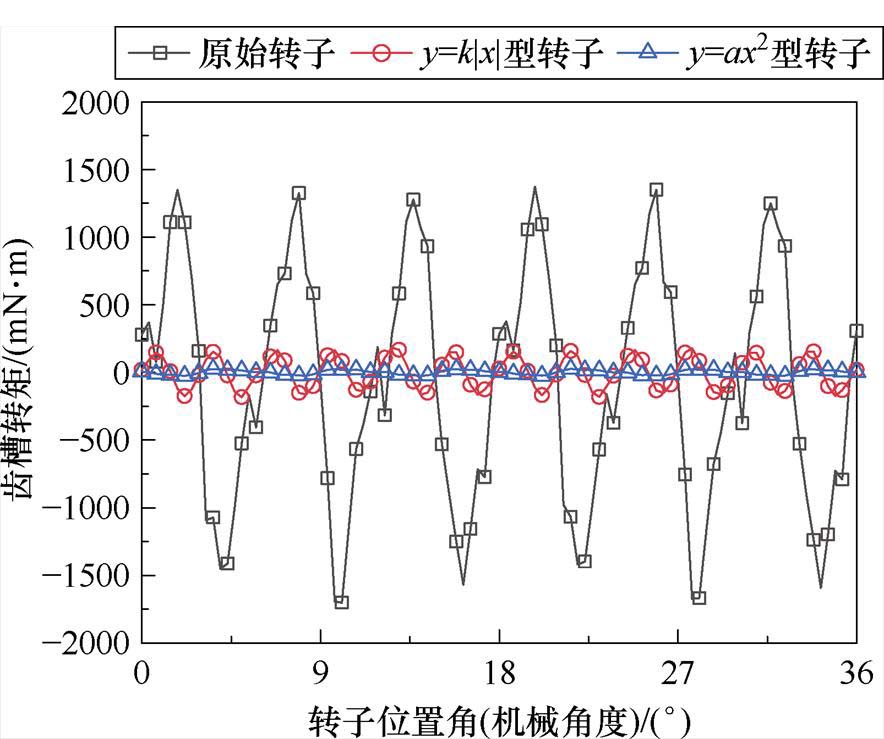
图12 齿槽转矩对比分析
Fig.12 Comparative analysis of cogging torque
通过对三种转子结构SPM-FS电机齿槽转矩的对比分析,y=ax2型转子电机的齿槽转矩最小。
图13所示为三种转子结构SPM-FS电机的转矩特性对比分析。三种转子结构SPM-FS电机在额定工况下(1 500 r/min,3.5 Arms)的转矩波形如图13a所示。由图13a可知,y=k|x|型转子和y=ax2型转子SPM-FS电机的转矩平均值为12.32 N·m和12.42 N·m,与原始转子电机转矩平均值(13.04 N·m)相比,分别降低了5.52%及4.75%。y=k|x|型转子和y=ax2型转子SPM-FS电机的转矩脉动由原始转子电机的25.79%分别降低至4.73%及1.42%。
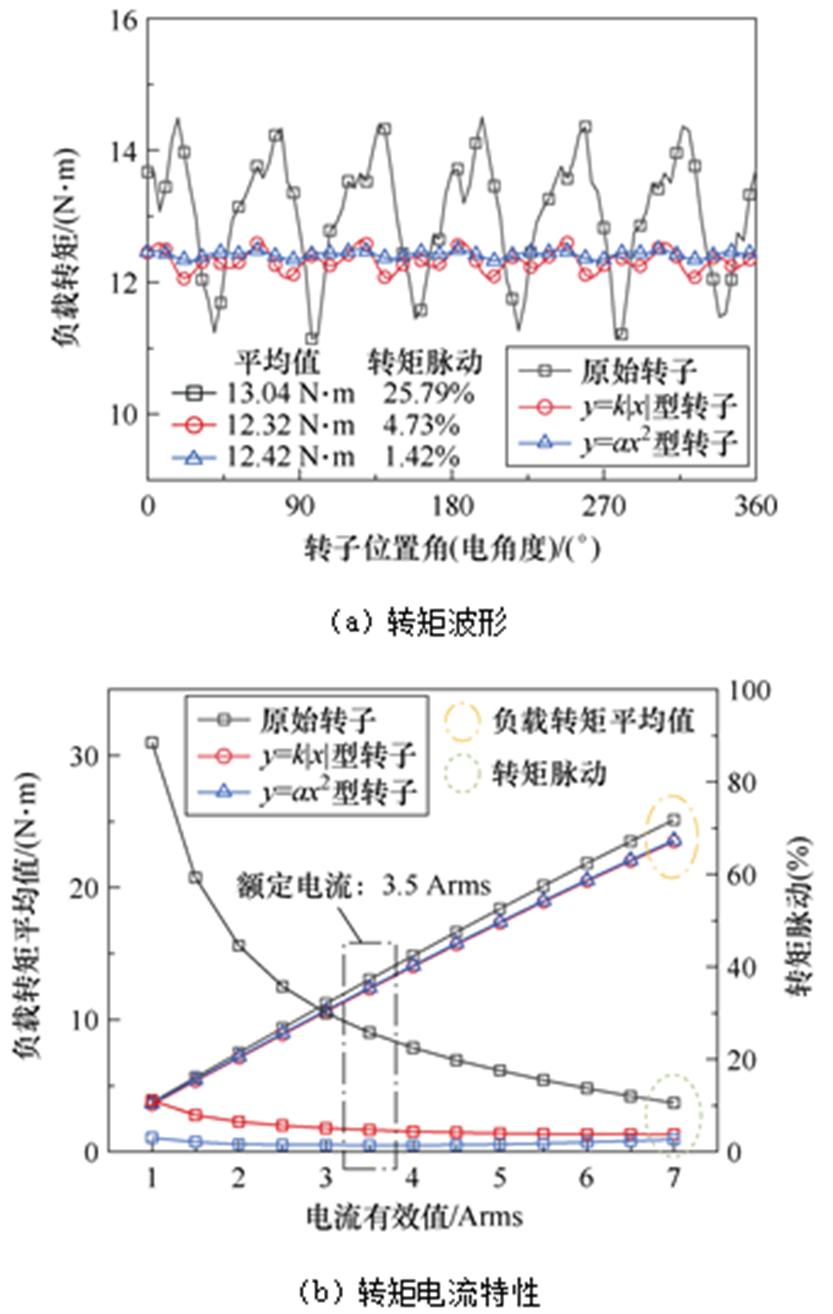
图13 转矩特性对比分析
Fig.13 Comparative analysis of torque characteristics
三种转子结构SPM-FS电机的转矩电流特性如图13b所示。可以看出,三种电机的转矩平均值随电流增大呈线性增加,其中,y=k|x|型转子和y=ax2型转子SPM-FS电机的转矩平均值基本一致,两种函数型转子电机在所分析电流有效值范围内的转矩平均值比原始转子电机分别平均降低了5.66%和4.74%。由于转矩脉动主要受齿槽转矩影响,电流增大对转矩脉动峰峰值影响较小,因此平均转矩随着电流增大而增加时,三种转子结构SPM-FS电机的转矩脉动随电流增大而减小。结果表明,两种函数型转子SPM-FS电机的转矩脉动在所分析电流范围内皆比原始转子电机的转矩脉动小,但随着电流增大,转矩脉动降低率逐渐减小。
通过对三种转子结构SPM-FS电机额定转矩波形和转矩电流特性的对比分析,相较于y=k|x|型转子,y=ax2型转子SPM-FS电机具有更大的平均转矩,且转矩脉动最小。
在额定转速(1 500 r/min)和额定工况(1 500 r/min,3.5 Arms)下分别对三种转子结构SPM-FS电机的空载损耗和负载损耗进行了对比分析,如图14所示。可以看出,原始转子电机的定子铁耗和转子铁耗最大,永磁体涡流损耗最小。y=k|x|型转子电机的定子铁耗最小。y=ax2型转子电机的永磁体涡流损耗最大,转子铁耗最小。综合考虑定转子铁耗和永磁体涡流损耗,原始转子、y=k|x|型转子、y=ax2型转子三种转子结构SPM-FS电机的总空载损耗分别为79.46、74.46、80.16 W。由图14b可知,三种转子结构SPM-FS电机各部分负载损耗大小关系与空载损耗一致,其中定子铁耗和永磁体涡流损耗受负载电流影响较大,转子铁耗受负载电流影响较小。此外,与原始转子电机相比,两种函数型转子电机的涡流损耗增大,其原因在于SPM-FS电机的涡流损耗主要受永磁体内部切向磁通密度影响,而两种函数型转子电机主要抑制了径向气隙磁场的谐波含量。原始转子、y=k|x|型转子、y=ax2型转子SPM-FS电机的总负载损耗分别为87.62、82.22、88.01 W。
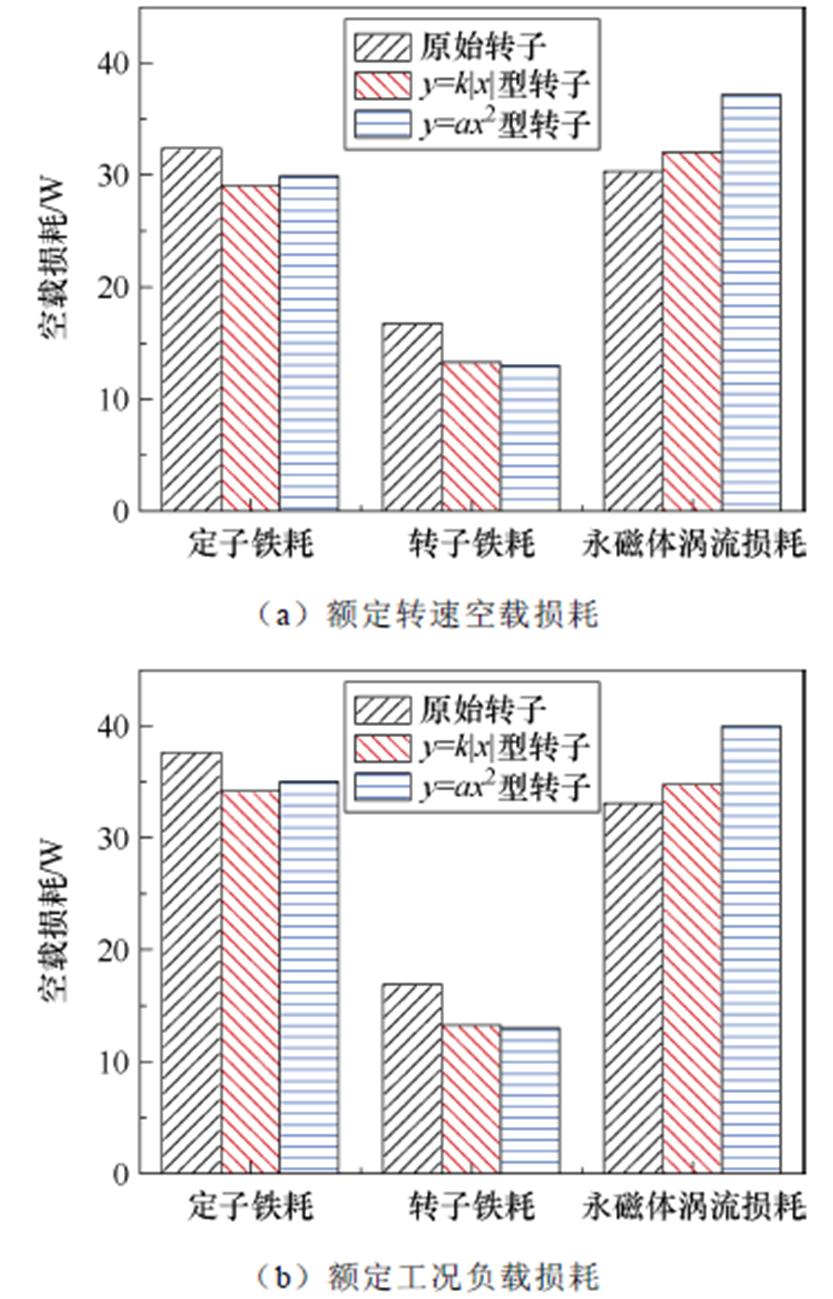
图14 额定工况损耗对比分析
Fig.14 Comparative analysis of losses at rated condition
图15所示为额定电流下三种转子结构SPM-FS电机负载损耗随转速变化曲线对比。可以看到,在所分析转速范围内,三种转子结构SPM-FS电机的负载定子铁耗、转子铁耗和永磁体涡流损耗随转速变化基本呈线性增加。其中,原始转子SPM-FS电机的负载定子铁耗和负载转子铁耗最大,y=ax2型转子SPM-FS电机的负载永磁体涡流损耗最大。原始转子、y=k|x|型转子、y=ax2型转子SPM-FS电机在所分析转速范围内的总平均损耗为105.32、98.13、103.86 W。
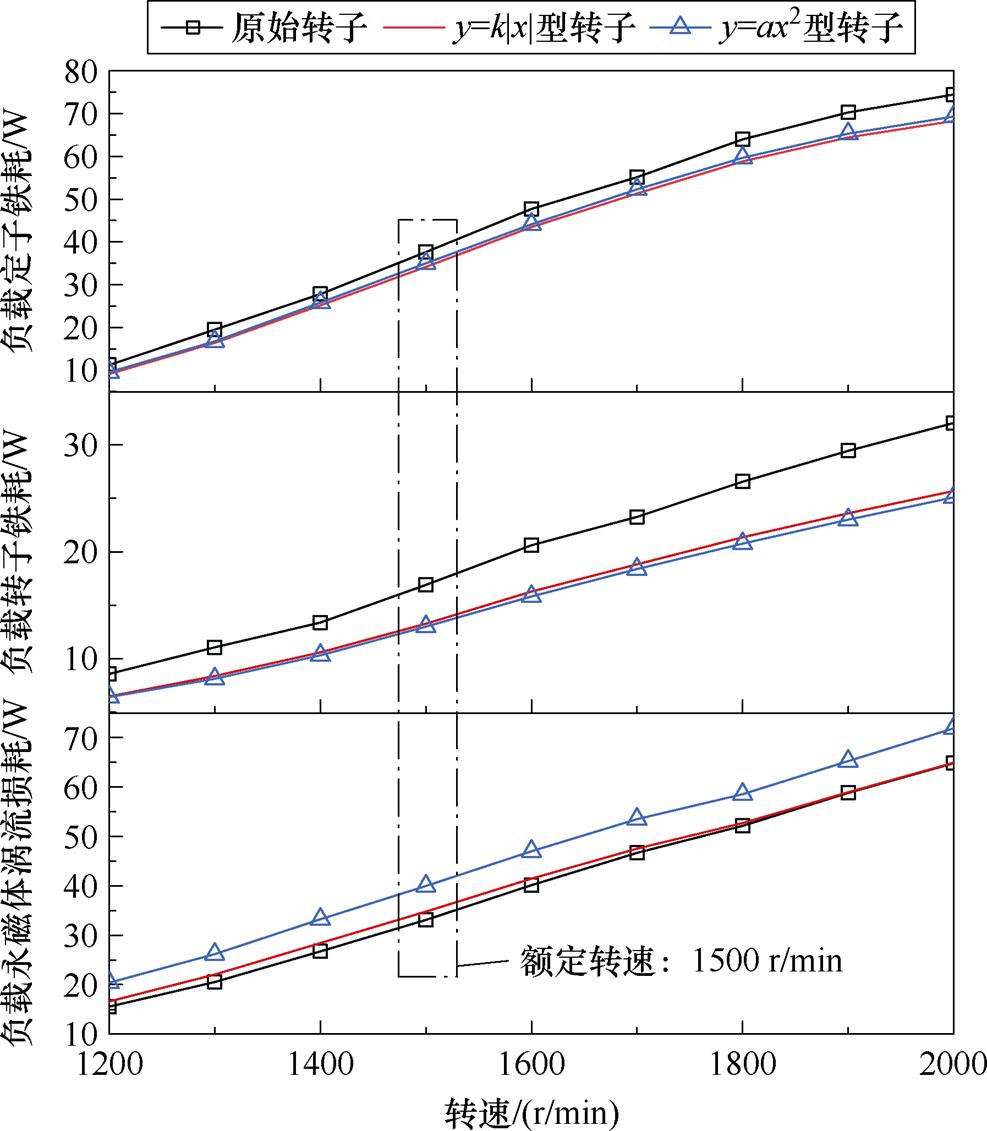
图15 额定电流负载损耗随转速变化
Fig.15 Variation of on-load losses with speed at rated current condition
图16所示为额定转速下三种转子结构SPM-FS电机负载损耗随电流变化曲线对比。可以看到,三种转子结构SPM-FS电机的负载定子铁耗和永磁体涡流损耗随电流增大呈非线性增加,而负载转子损耗随电流增大基本不变。原始转子、y=k|x|型转子、y=ax2型转子SPM-FS电机在所分析电流范围内的总平均损耗为92.28、86.97、92.69 W。
对三种转子结构SPM-FS电机额定工况空载、负载损耗以及负载损耗随转速和电流变化进行分析,在额定工况下y=ax2型转子SPM-FS电机总损耗最大,y=k|x|型转子电机总损耗最小。
为验证上述分析的正确性,根据表1所示电机参数,加工了两种函数型转子SPM-FS电机样机,并对不同转子结构SPM-FS电机样机的空载反电动势和齿槽转矩进行了测试。SPM-FS电机样机两种函数型转子结构及样机测试平台如图17所示。由图可知,测试平台含齿槽转矩测试平台及反电动势、转矩测试平台。其中,齿槽转矩测试平台由SPM-FS电机、转矩传感器、分度盘、转矩显示仪及转矩传感器组成。反电动势、转矩测试平台由SPM-FS电机、对拖电机、转矩传感器等组成。
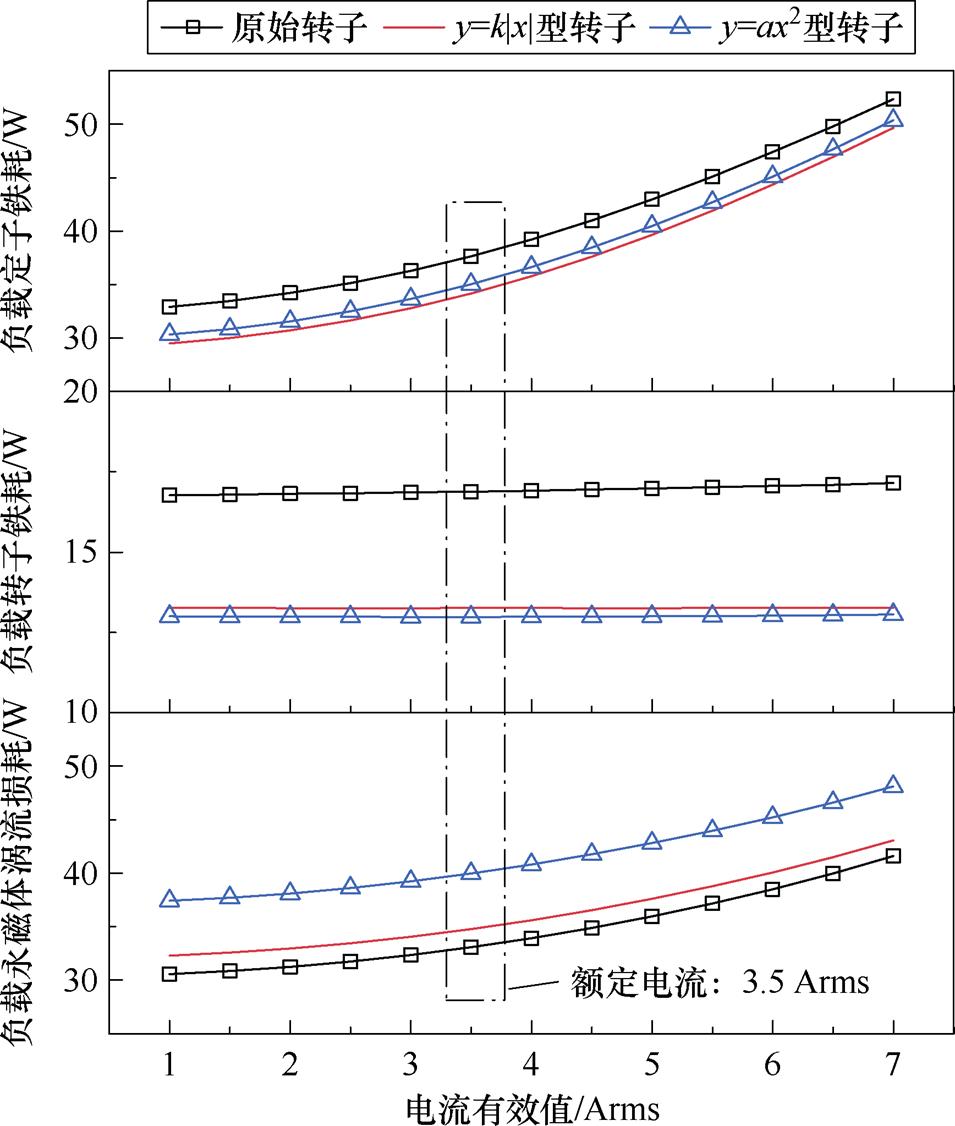
图16 额定转速负载损耗随电流变化
Fig.16 Variation of on-load losses with current at rated speed condition

图17 函数型SPM-FS电机样机结构及测试平台
Fig.17 Prototype of the functional-rotor SPM-FS machines and test platform
图18所示为两种函数型转子SPM-FS电机样机在1 500 r/min下的空载反电动势测试结果。可以看出,两种函数型转子电机的实验结果与有限元结果基本吻合,验证了有限元结果分析的正确性。
图19所示为两种函数型转子SPM-FS电机样机的齿槽转矩测试结果。y=k|x|型转子、y=ax2型转子SPM-FS电机的齿槽转矩测试结果峰峰值与原始电机齿槽转矩相比,分别降低了79.06%和78.82%,验证了函数型转子对齿槽转矩抑制的有效性。需要注意的是,在电机加工过程中,受加工和装配精度影响,不可避免地存在加工误差,且y=ax2型转子与y=k|x|型转子相比更易受加工误差影响[20],因此齿槽转矩测试结果与图12所示的有限元结果并非完全一致。但测试结果仍表明了两种函数型转子都具有较好的齿槽转矩抑制效果。
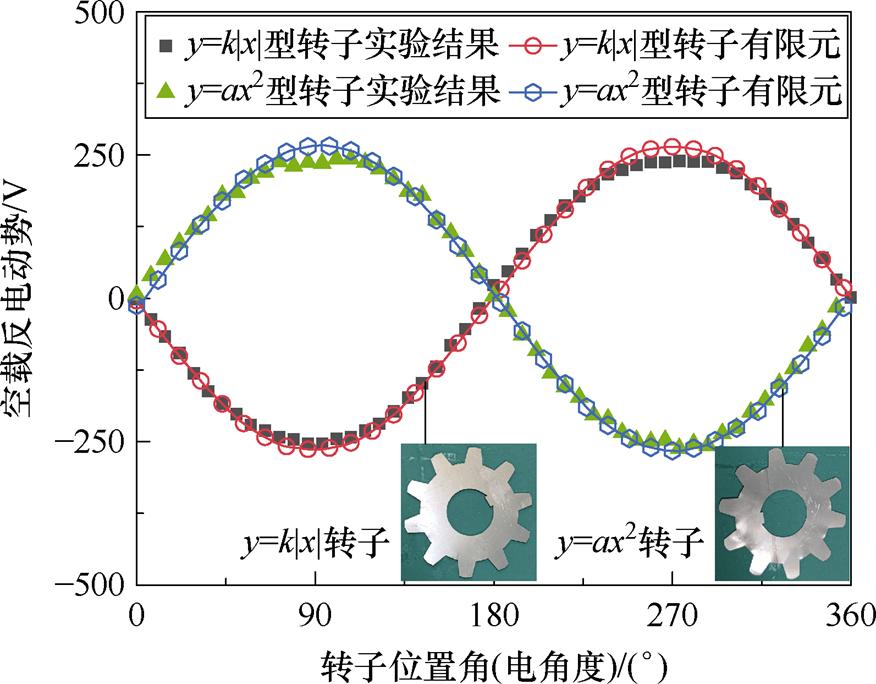
图18 空载反电动势测试结果(1 500 r/min)
Fig.18 Tested results of no-load back electromotive force (1 500 r/min)
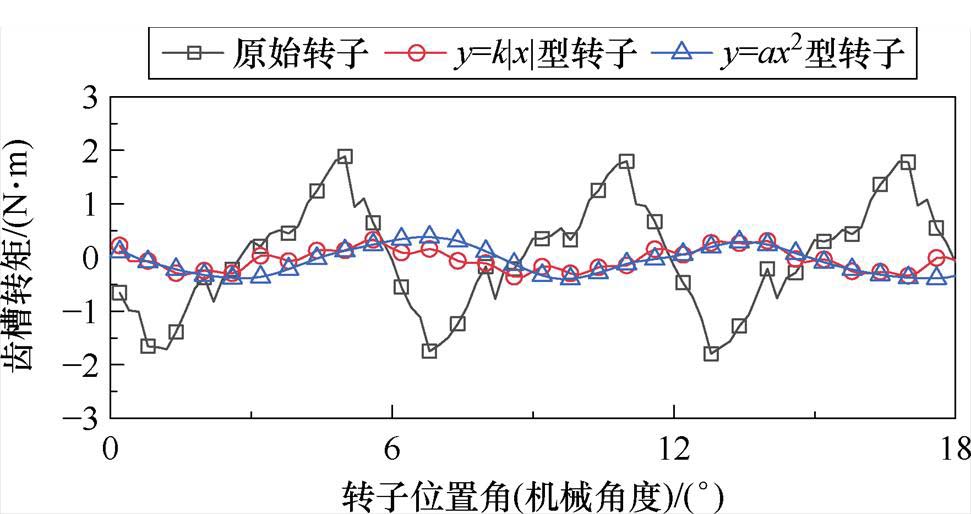
图19 齿槽转矩测试结果
Fig.19 Tested results of cogging torque
为进一步验证所提函数型转子电机的转矩脉动抑制效果,以齿槽转矩抑制效果较好且转矩下降较小的y=ax2型转子SPM-FS电机为例,对其以及原始转子电机的转矩电流特性及额定工况转矩波形进行了测试及对比,如图20所示。可见,所提y=ax2型转子电机与原始转子电机相比,在额定工况平均转矩仅下降4.77%的情况下,转矩波动峰峰值降低了66.66%,与齿槽转矩抑制效果接近,验证了所提函数型转子电机具有较好的转矩脉动抑制效果。
本文针对原始转子、y=k|x|型转子和y=ax2型转子SPM-FS电机开展了磁场调制机理分析。说明了SPM-FS电机平均转矩主要由调制系数i=1、3和j=1(|iPpm±jPr|)组合调制出的低次谐波贡献,而齿槽转矩和转矩脉动主要由气隙磁通密度高次谐波贡献。揭示了两种函数型转子齿槽转矩及转矩脉动抑制机理。其中,y=k|x|型转子电机在有效抑制其他次齿槽转矩谐波的同时,54和66次幅值较大的谐波可相互抵消,而y=ax2型转子电机则有效抑制了高次谐波分量。基于二维有限元法对比分析了三种转子结构SPM-FS电机的反电动势、转矩、损耗等性能。结果表明,y=ax2型转子SPM-FS电机在额定空载反电动势基波和额定平均转矩降低较小,且具有最小的空载反电动势THD、齿槽转矩和转矩脉动,而y=k|x|型转子的损耗最小。通过样机加工及测试,验证了有限元分析的正确性和函数型转子齿槽转矩抑制的有效性。分析结果可为函数型转子SPM-FS电机的设计、选型和应用提供参考。
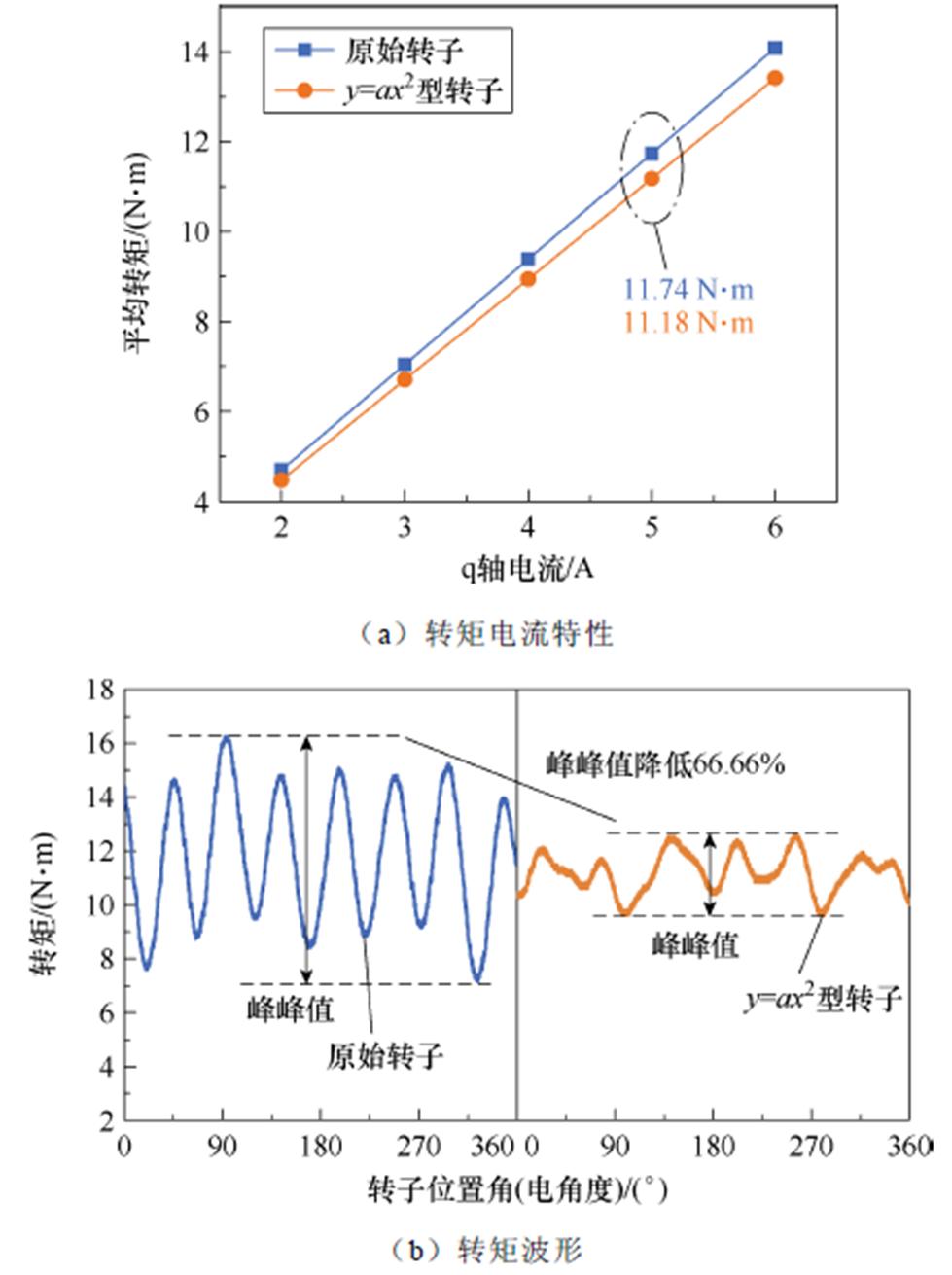
图20 转矩测试结果
Fig.20 Tested results of torque
参考文献
[1] 关涛, 刘大猛, 何永勇. 永磁轮毂电机技术发展综述[J]. 电工技术学报, 2024, 39(2): 378-396.
Guan Tao, Liu Dameng, He Yongyong. Review on development of permanent magnet in-wheel motors[J]. Transactions of China Electrotechnical Society, 2024, 39(2): 378-396.
[2] 宋承林, 吴志鹏, 黎明, 等. 永磁同步电机电磁振动和噪声研究综述[J]. 电工技术学报, DOI: 10.19595/j.cnki.1000-6753.tces.250439.
Song Chenglin, Wu Zhipeng, Li Ming, et al. Review of research on electromagnetic vibration and noise permanent magnet synchronous motor[J]. Transa- ctions of China Electrotechnical Society, DOI: 10. 19595/j.cnki.1000-6753.tces.250439.
[3] 史婷娜, 徐奕扬, 谭本慷, 等. 机器人关节用伺服电机关键技术与展望[J]. 电工技术学报, 2025, 40(19): 6192-6212.
Shi Tingna, Xu Yiyang, Tan Benkang, et al. Key technologies and prospects of the servo motor for robot joints[J]. Transactions of China Electrotechnical Society, 2025, 40(19): 6192-6212.
[4] 刘洋, 宋宝, 周向东, 等. 轮辐式游标永磁电机分析与多目标优化设计[J]. 电机与控制学报, 2023, 27(9): 1-9.
Liu Yang, Song Bao, Zhou Xiangdong, et al. Analysis and multi-objective optimization of spoke type vernier permanent-magnet machine[J]. Electric Machines and Control, 2023, 27(9): 1-9.
[5] 许芷源, 程明, 张淦. 基于磁感原理的磁通切换型永磁轮毂电机矢量磁网络模型[J]. 电工技术学报, 2025, 40(22): 7204-7213.
Xu Zhiyuan, Cheng Ming, Zhang Gan. Modeling of the vector magnetic network for flux-switching per- manent magnet in-wheel motor based on the mag- ductance principle[J]. Transactions of China Elec- trotechnical Society, 2025, 40(22): 7204-7213
[6] 林佳泷, 周扬忠, 陈东远, 等. 基于最小二乘支持向量机解耦的无轴承磁通切换电机转子径向磁悬浮逆系统控制[J]. 电工技术学报, 2025, 40(14): 4534-4546.
Lin Jialong, Zhou Yangzhong, Chen Dongyuan, et al. Control of inverse system of rotor radial magnetic suspension of bearingless flux-switching permanent magnet machines based on decoupling of least squares support vector machines[J]. Transactions of China Electrotechnical Society, 2025, 40(14): 4534-4546.
[7] Zhang Zhiheng, Wang Peixin, Hua Wei, et al. Com- prehensive investigation and evaluation of cogging torque suppression techniques of flux-switching permanent magnet machines[J]. IEEE Transactions on Transportation Electrification, 2023, 9(3): 3894- 3907.
[8] 连广坤, 陈彪, 班斐, 等. 分块转子磁通切换电机绕组理论及谐波特性的研究[J]. 电工技术学报, 2020, 35(增刊1): 136-148.
Lian Guangkun, Chen Biao, Ban Fei, et al. Study on winding combination and harmonic characteristics of flux-switching machines with segmental rotor[J]. Transactions of China Electrotechnical Society, 2020, 35(S1): 136-148.
[9] 程明, 张淦, 花为. 定子永磁型无刷电机系统及其关键技术综述[J]. 中国电机工程学报, 2014, 34(29): 5204-5220.
Cheng Ming, Zhang Gan, Hua Wei. Overview of stator permanent magnet brushless machine systems and their key technologies[J]. Proceedings of the CSEE, 2014, 34(29): 5204-5220.
[10] 陈云云, 朱孝勇, 全力, 等. 基于参数敏感度的双凸极永磁型双定子电机的优化设计和性能分析[J]. 电工技术学报, 2017, 32(8): 160-168.
Chen Yunyun, Zhu Xiaoyong, Quan Li, et al. Parameter sensitivity optimization design and per- formance analysis of double-salient permanent- magnet double-stator machine[J]. Transactions of China Electrotechnical Society, 2017, 32(8): 160- 168.
[11] Su Peng, Wang Yiwei, Li Yongjian, et al. Cogging torque reduction of axial-modular flux switching permanent magnet machine by module combination technique[J]. IEEE Transactions on Transportation Electrification, 2024, 10(1): 1947-1956.
[12] 郝立, 林明耀, 徐妲, 等. 轴向磁场磁通切换型永磁电机齿槽转矩抑制[J]. 电工技术学报, 2015, 30(2): 21-26.
Hao Li, Lin Mingyao, Xu Da, et al. Cogging torque reduction in axial field flux-switching permanent magnet machines[J]. Transactions of China Elec- trotechnical Society, 2015, 30(2): 21-26.
[13] 朱晓锋, 花为. 定子永磁型磁通切换电机齿槽转矩及其抑制技术[J]. 中国电机工程学报, 2017, 37(21): 6146-6157.
Zhu Xiaofeng, Hua Wei. Overview of cogging torque and its suppression technologies in flux-switching permanent magnet machines[J]. Proceedings of the CSEE, 2017, 37(21): 6146-6157.
[14] Zhu Xiaofeng, Hua Wei, Cheng Ming. Cogging torque minimization in flux-switching permanent magnet machines by tooth chamfering[C]//2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 2016: 1-7.
[15] Wang Daohan, Wang Xiuhe, Jung S Y. Reduction on cogging torque in flux-switching permanent magnet machine by teeth notching schemes[J]. IEEE Transa- ctions on Magnetics, 2012, 48(11): 4228-4231.
[16] Xu Da, Lin Mingyao, Fu Xinghe, et al. Cogging torque reduction of a hybrid axial field flux-switching permanent-magnet machine with three methods[J]. IEEE Transactions on Applied Superconductivity, 2016, 26(4): 5201305.
[17] Fei Weizhong, Luk P C K, Shen Jianxin. Torque analysis of permanent-magnet flux switching machines with rotor step skewing[J]. IEEE Transactions on Magnetics, 2012, 48(10): 2664-2673.
[18] Jin Mengjia, Wang Yu, Shen Jianxin, et al. Cogging torque suppression in a permanent-magnet flux- switching integrated-starter-generator[J]. IET Electric Power Applications, 2010, 4(8): 647-656.
[19] 王培欣, 花为, 胡铭觐, 等. 余弦削极转子磁通切换永磁电机设计与性能分析[J]. 中国电机工程学报, 2022, 42(22): 8372-8382.
Wang Peixin, Hua Wei, Hu Mingjin, et al. Design and performance analysis of flux-switching permanent magnet machine with cos-chamfering rotor[J]. Pro- ceedings of the CSEE, 2022, 42(22): 8372-8382.
[20] Zhang Zhiheng, Hua Wei, Wang Peixin, et al. Torque characteristics of SPM-FS machines with functional- contour salient pole rotors considering manufacturing error[J]. IEEE Transactions on Energy Conversion, 2022, 37(4): 2645-2656.
[21] 程明, 文宏辉, 花为, 等. 电机气隙磁场调制统一理论及其典型应用[J]. 中国电机工程学报, 2021, 41(24): 8261-8283.
Cheng Ming, Wen Honghui, Hua Wei, et al. General airgap field modulation theory for electrical machines and its typical applications[J]. Proceedings of the CSEE, 2021, 41(24): 8261-8283.
[22] Cheng Ming, Han Peng, Hua Wei. General airgap field modulation theory for electrical machines[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6063-6074.
[23] Wang Peixin, Hua Wei, Zhang Gan, et al. Principle of flux-switching PM machine by magnetic field modu- lation theory part Ⅱ: electromagnetic torque gen- eration[J]. IEEE Transactions on Industrial Elec- tronics, 2022, 69(3): 2437-2446.
Abstract Stator permanent magnet flux-switching (SPM-FS) machines are promising in electric vehicles and rail transit due to the advantages of simple rotor structure, high reliability, and easy cooling of permanent magnets. However, this type of machine typically exhibits an ample cogging torque because of its special doubly-salient structure. Therefore, this paper proposes two kinds of functional rotors for the SPM-FS machines: the outer profiles of rotor tips that match the y=k|x| function and the y=ax2 function distribution, respectively. Compared to the SPM-FS machine with the original rotor, the magnetic field modulation mechanism and performance of SPM-FS machines with functional rotors are studied.
Firstly, the structures of the proposed y=k|x| and y=ax2 function-rotor SPM-FS machines are introduced. Taking the y=k|x|machine as an example, variations in key parameters (cogging torque, torque ripple, and torque ripple reduction coefficient) with coefficient k are analyzed. The influence of tooth width on machine performance in relation to k is also studied. A selection method for the coefficients k and a is provided.
Secondly, the machines’ air-gap magnetic field modulation mechanism, along with the generation and suppression mechanisms of cogging torque and torque ripple, is analyzed. The cogging torque and ripple are mainly influenced by harmonic components of the air-gap flux density resulting from the rotor modulation function. The relationships between air-gap flux density harmonics and cogging torque/average torque are analyzed. Both proposed machines improve the waveform of rotor modulation function, effectively suppressing high-order harmonics in the air-gap flux density, thereby reducing cogging torque and torque ripple.
Finally, based on the finite element method (FEM), the back electromotive force (back-EMF), cogging torque, torque characteristics, and losses for the original, y=k|x|, and y=ax2 machines are presented. Compared to the original machine, the proposed y=k|x| and y=ax2 machines reduce cogging torque by 88.15% and 98.31%, respectively, while their rated average torque decreases by merely 5.52% and 4.75%. Furthermore, the rated torque ripple of the y=k|x| and y=ax2 machines is reduced from 25.79% to 4.73% and 1.42%, respectively. Prototypes of both proposed machines are manufactured and tested, which further validates the correctness of the theoretical and simulation analysis.
In summary, this paper conducted magnetic field modulation analysis and performance comparisons for the original, y=k|x|, and y=ax2 SPM-FS machines. (1) The average torque of SPM-FS machines is primarily contributed by low-order harmonics modulated via a combination of i=1, 3, and j=1 (|iPpm±jPr|), while cogging torque and torque ripple are mainly generated by high-order air-gap flux density harmonics. (2) The suppression mechanisms for cogging torque and torque ripple are revealed. Specifically, while the y=k|x|machine effectively suppresses other cogging torque harmonics, its prominent 54th and 66th harmonics mutually cancel. They=ax2 machine directly suppresses high-order harmonic components in the cogging torque. (3) The y=ax2 machine exhibits the smallest no-load back-EMF total harmonic distortion (THD), cogging torque, and torque ripple, with minimal reduction in rated no-load back-EMF fundamental amplitude and average torque. The y=k|x|machine yields the lowest losses.
Keywords:Stator permanent magnet, flux switching, magnetic field modulation, cogging torque, torque ripple
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.250355
国家自然科学基金重点项目(52130706)和东南大学南通海洋高等研究院重点项目(KP202405)资助。
收稿日期 2025-03-07
改稿日期 2025-04-25
张天翔 男,1997年生,博士研究生,研究方向永磁电机设计、优化、分析。
E-mail: zhangtianxiang@seu.edu.cn
花 为 男,1978年生,教授,博士生导师,研究方向为电动汽车电机驱动系统、新型永磁电机本体分析设计与控制等。
E-mail: huawei1978@seu.edu.cn(通信作者)
(编辑 崔文静)