图1 典型WRSSG系统架构
Fig.1 The typical structure of WRSSG system
摘要 单相交流励磁方法无需改变主励磁机结构、对励磁电源要求低、实施简单,是解决三级式起动发电机起动阶段励磁问题的主要方案之一。单相交流励磁方法以脉振磁场为媒介向转子侧传递能量,且由于主励磁机转子回路存在非线性环节,其运行机理比较复杂,目前对其工作特性还未有一个完整而统一的认识。该文搭建了主励磁机有限元场路耦合模型,分析了单相交流励磁方法的工作特性,发现在励磁频率高于起动脱开转速对应电频率的一半时,主励磁机可实现近似“恒流源”特性,在此基础上提出了全转速范围下的起动励磁策略。最后研制了原理样机并对单相交流励磁系统的输出电流和励磁效率变化规律进行了实验验证。
关键词:三级式无刷同步电机(WRSM) 无刷励磁系统 主励磁机 单相交流励磁 有限元分析
多电/全电飞机(More Electric Aircraft, MEA/ All Electric Aircraft, AEA)是现代飞机的发展趋势,实现起动发电一体化是MEA的典型技术特征之一[1]。由于发电技术成熟可靠,三级式无刷同步电机(Wound Rotor Synchronous Machine, WRSM)在航空领域作为机载主电源获得了广泛的应用,也是构成起动发电机系统的首选方案[2-3]。
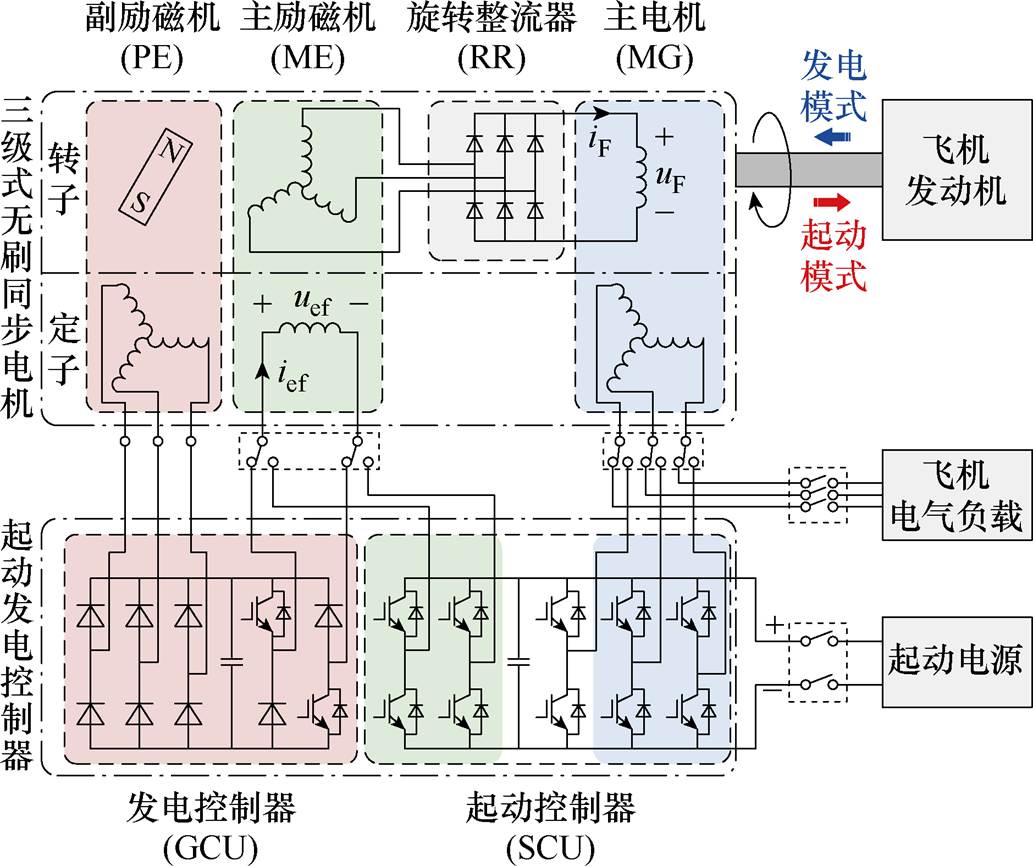
WRSM的主要结构包括主电机(Main Generator, MG)、主励磁机(Main Exciter, ME)、副励磁机(Pre- Exciter, PE)和旋转整流器(Rotating Rectifier, RR)。WRSM和起动发电控制器(Starter/Generator Control Unit, SGCU)一起构成了三级式起动发电机(Wound Rotor Synchronous Starter/Generator, WRSSG)系统[4],如图1所示。在发电模式下,发动机驱动电机旋转,PE输出交流电,经发电控制器(Generator Control Unit, GCU)整流、斩波后为ME提供可调节的直流励磁电流,ME是一台旋转电枢式电励磁同步发电机,ME电枢绕组输出的交流电经RR整流后为MG提供直流励磁电流。在起动模式下,由起动控制器(Starter Control Unit, SCU)向MG供电,但是由于电机处于静止或低速状态,ME的输出功率很低,无法为MG提供足够的励磁电流。因此,WRSSG在起动模式下存在励磁困难的问题[5]。
图1 典型WRSSG系统架构
Fig.1 The typical structure of WRSSG system
现有的解决方案主要有单相交流励磁、多相交流励磁、在线励磁切换三类。单相与多相(两相、三相)交流励磁方法的分类是依据交流励磁电源的相数而非ME励磁绕组的相数进行定义的,ME励磁绕组的形式可以是多种多样的。
单相交流方法即在起动模式下向ME输入单相交流电,通过单相交流电流产生的脉振磁场向转子侧传递能量,ME工作在一种特殊的单相交流电机方式下,在起动完成后进入发电模式时再将ME切换为常规的直流励磁方式。文献[6-7]提出了多路并联的单相交流励磁方法,以降低励磁绕组交流阻抗,提高ME输出功率。文献[8]提出了一种罩极式单相ME,以提高单相交流励磁方式下的输出能力。文献[9-10]对单相ME的起动发电一体化设计理念进行了阐述,表明通过合理设计和优化后的单相ME可以同时满足起动和发电模式下的MG励磁需求,且在恰当的“恒压恒频”励磁条件下,ME自身即可保持输出电流基本恒定,而无需励磁控制。
由于脉振磁场的能量传输效率较低,有研究人员提出通过对称多相交流励磁电流产生旋转磁场以实现ME起动工况下的输出。文献[11-12]提出在ME中增设一套三相交流励磁绕组,在起动模式下采用三相交流励磁,在发电模式下采用直流励磁。文献[13-15]提出通过绕组切换,实现起动模式下三相交流励磁和发电模式下直流励磁两种不同工况的绕组复用。也有文献提出了在起动和发电两种模式下均采用三相交流励磁方法,无需对励磁绕组和励磁电源进行切换[16-17]。文献[18-22]对三相交流励磁方法的基本特性、三相ME的优化设计、数学建模、输出电流估算等进行了研究。
任意多相对称交流电流均可产生旋转磁场,有学者提出了两相交流励磁方法,并对两相ME设计、两相交流励磁控制、两相励磁系统建模、MG与ME的起动协同控制等内容进行了深入的研究[23-25]。
还有学者提出了励磁在线切换方法,在起动过程的不同转速阶段采用不同的励磁方法。文献[26-28]提出了单相交流-直流的励磁切换方法,在起动初期采用单相交流励磁方法,当达到某个特定转速时切换为直流励磁。文献[29-30]提出了三相交流-直流的励磁切换方法,ME励磁绕组为三相开绕组,由两组逆变器控制,通过改变双逆变器的控制逻辑实现不同励磁方式的切换。
总结现有励磁方法的特点:多相交流励磁方法的输出功率较高,但是输出随转速变化而大幅变化,需要励磁电源进行实时调节,励磁控制较为复杂;励磁在线切换方法虽然较为灵活,可以根据励磁需求切换最合适的励磁方法,但是励磁方式的切换对控制精度要求较高,切换过程中的电压电流变化会对系统造成冲击,励磁控制最为复杂。相比较而言,单相交流励磁方法无需改变原ME结构,对励磁电源的要求较低、实施简单,具有很强的实用性。
但是脉振磁场的运行机理比较复杂,目前对单相交流励磁方法的工作特性还未有一个完整而统一的认识,且由于无刷化的结构特性,相关参数难以直接测量,一些研究结果缺乏充分的实验证实。因此,本文对单相交流励磁特性展开了进一步的研究,具体如下:
(1)通过ME理想数学模型,分析了单相交流励磁方法的基本原理,并结合有限元场路耦合仿真对其工作特性进行了分析。最后给出了较优的励磁电压和励磁频率的选取原则。
(2)结合起动模式下ME的性能要求,提出了全转速范围下相应的励磁控制策略,简化了MG的起动控制系统,易于实施,便于实现起动发电一体化,具有重要工程意义。
(3)研制了WRSSG样机,对单相交流励磁系统的输出电流和励磁效率变化规律进行了相关的实验验证。
在起动模式下,ME需要满足的性能要求主要包括以下几点:
(1)具有足够的容量,能够满足MG所有工况的励磁需求。
(2)高效率、低励磁功率。在起动模式下,飞机自身动力不足,起动电源的容量有限,ME必须尽可能以最低的励磁功率获得最高的输出。
(3)具有“恒流源”特性,即保持ME输出电流IF与转速n无关。因为MG电磁转矩由MG电枢电流is、电枢电流角bs、MG励磁电流IF共同决定,如式(1)所示。而MG电枢电流is、电流角bs可以由SCU中的三相全桥逆变器独立控制,MG励磁电流IF则是由ME输出决定的,ME输出受到转速n影响,就会使得起动时MG与ME相互耦合,增加了起动控制的复杂程度。若ME具有“恒流源”特性,则能够实现ME与MG的解耦,大幅简化起动控制[5, 23],如图2所示。
 (1)
(1)
式中,pMG为MG极对数;LF为MG励磁电感;Ld、Lq分别为MG电枢直轴、交轴电感。
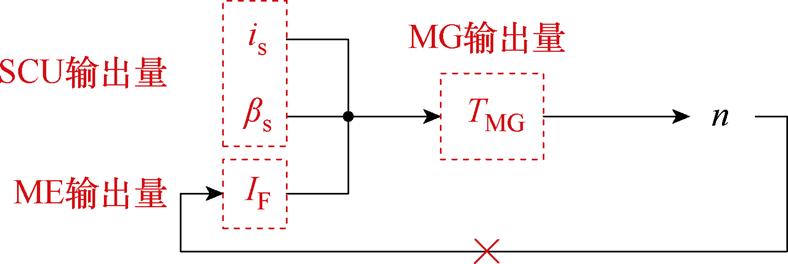
图2 起动模式下ME与MG的耦合
Fig.2 The coupling of ME and MG in starting mode
本文以一台12 kV·A WRSSG为研究对象,其性能指标见表1。其中,ME的主要结构参数见表2。
表1 12 kV·A WRSSG性能指标
Tab.1 The performance parameters of 12 kV·A WRSSG

参 数数 值 发电模式额定功率/(kV·A)12 额定电压/Vac115 转速范围/(r/min)8 200~12 600 起动模式最大功率/kW11.4 最大转矩/(N·m)78 转速范围/(r/min)0~7 000
表2 12 kV·A WRSSG ME结构参数
Tab.2 The structure parameters of ME of 12 kV·A WRSSG
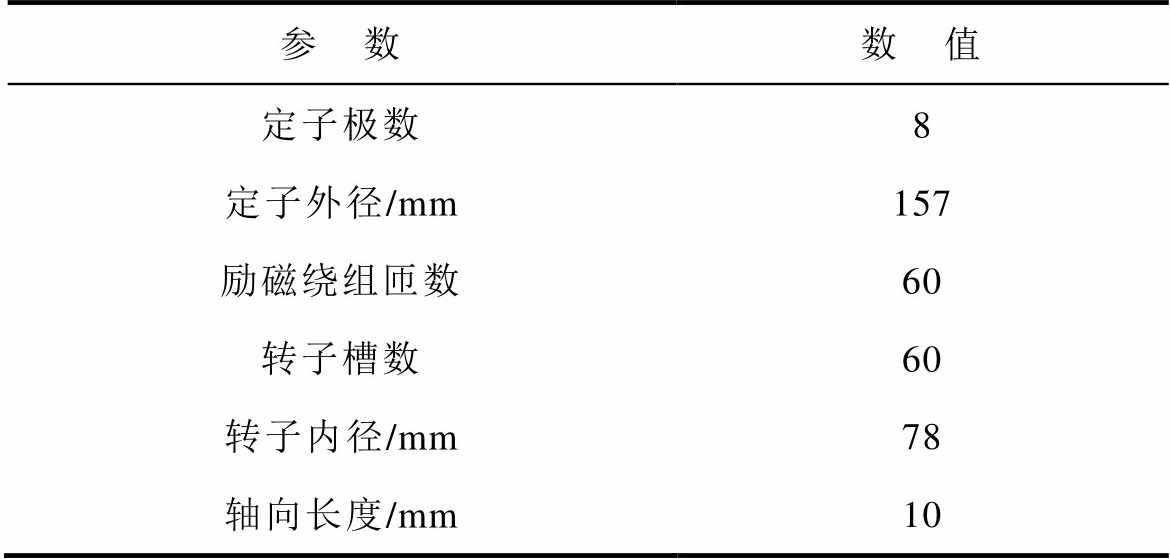
参 数数 值 定子极数8 定子外径/mm157 励磁绕组匝数60 转子槽数60 转子内径/mm78 轴向长度/mm10
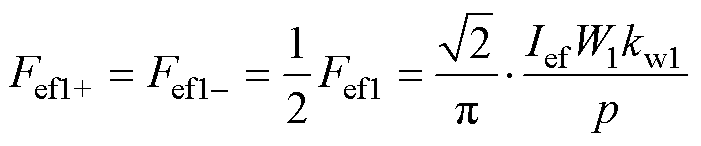
单相交流电流产生脉振励磁磁动势 ,其基波幅值为
,其基波幅值为
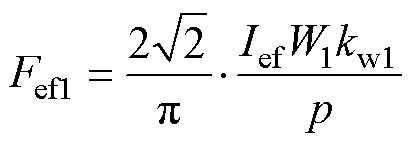 (2)
(2)
式中,Ief为ME励磁电流有效值;W1为ME励磁绕组每相串联匝数;kw1为ME励磁绕组因数;p为ME极对数。
脉振磁动势可以分解为两个幅值相等、转速相同、转向相反的旋转磁动势 、
、 ,如图3所示,其基波幅值为
,如图3所示,其基波幅值为
 (3)
(3)
式中,Fef1为脉振励磁磁动势基波幅值。
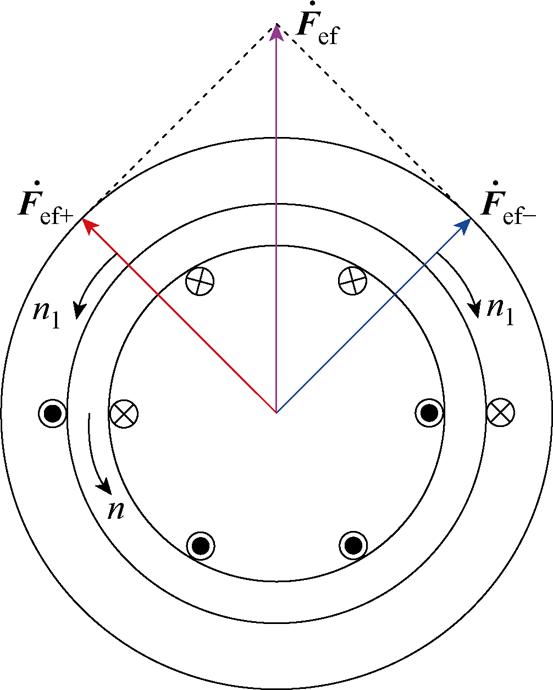
图3 单相交流励磁方法的励磁磁动势
Fig.3 The excitation magnetic motiveforce of single-phase AC excitation method
正转、反转磁动势在转子侧分别产生感应电动势和电流。正转磁动势的转速为n1=60f1/p,其中,f1为ME的励磁频率,在转子侧产生感应电动势和电流的频率为f2+=sf1,其中,s为转差率,s=(n1-n)/n1。反转磁动势的转速为-n1,在转子侧产生感应电动势和电流的频率为f2-=(2-s)f1。最终转子侧感应电动势是正转、反转磁动势产生感应电动势分量的叠加。ME的工作方式类似于单相异步电机。
由于ME转子侧存在RR这样的非线性环节,ME无法像异步电机一样给出T型等效电路。但是在空载情况即ME与RR之间开路时,可以类似于异步电机建立数学模型对ME的空载特性进行分析。
建立单相ME空载情况下的理想数学模型,作出如下假设:
(1)忽略空间谐波,转子三相绕组对称,在空间互差120°电角度,所产生的磁动势沿气隙按正弦 分布。
(2)忽略磁路饱和,各绕组的自感和互感均为恒定值。
(3)忽略铁心损耗。
(4)不考虑频率变化和温度变化对绕组电阻的影响。
单相ME的定子励磁绕组用大写字母A表示,转子电枢绕组用小写字母a、b、c表示。单相ME绕组轴线之间的关系如图4所示。转子a相绕组轴线与定子A相绕组轴线之间的夹角(电角度)为转子位置角q。w为转子旋转的电角速度。
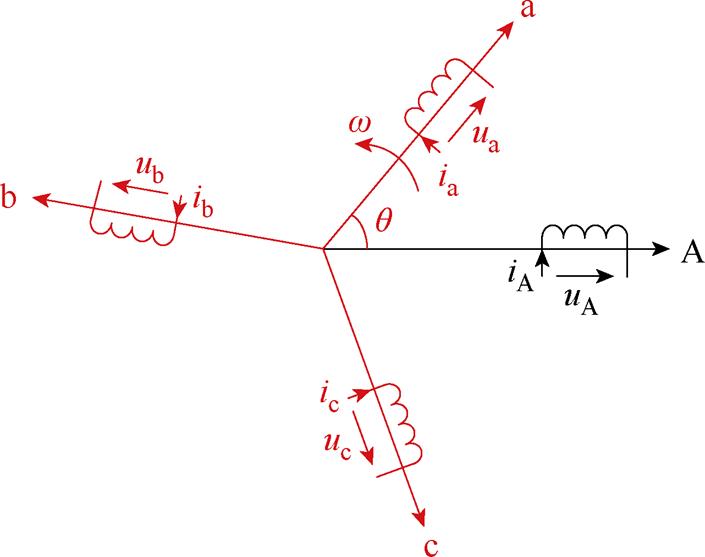
图4 单相ME的等效模型
Fig.4 The equivalent model of single-phase ME
根据数学模型对ME空载情况进行分析。在单相交流励磁方式下,励磁电源通常为交流电压源,设为
 (4)
(4)
其中
w1=2pf1
式中,uA为ME定子励磁绕组的励磁电压;uef为励磁电源电压;Uef为ME励磁电压有效值。
由于转子开路,转子电枢电流均为0,有
 (5)
(5)
所以转子回路对定子回路无影响,可独立分析定子回路。
定子励磁电流为
 (6)
(6)
式中,Ief为ME励磁电流有效值;a0为空载定子功率因数角;Lss为ME定子绕组自感;Rs为ME定子绕组电阻。
求解转子感应电动势。以a相为例,根据磁链电压方程可求解a相转子感应电动势为
 (7)
(7)
式中, 为a相磁链;MaA为定转子绕组互感;Msr为定转子绕组互感最大值;q0为转子初始位置角。因为数学模型是按照电机惯例建立的,所以转子感应电动势的表达式存在负号。式(7)中的第一项
为a相磁链;MaA为定转子绕组互感;Msr为定转子绕组互感最大值;q0为转子初始位置角。因为数学模型是按照电机惯例建立的,所以转子感应电动势的表达式存在负号。式(7)中的第一项 sf1MsrIefsin(2psf1t-q0-a0)对应着正转磁动势产生的感应电动势,第二项
sf1MsrIefsin(2psf1t-q0-a0)对应着正转磁动势产生的感应电动势,第二项 (2-s)f1MsrIefsin[2p(2-s)f1t+q0-a0]对应着反转磁动势产生的感应电动势。转子其余相感应电动势同理可得。所以转子感应电动势的表达式为
(2-s)f1MsrIefsin[2p(2-s)f1t+q0-a0]对应着反转磁动势产生的感应电动势。转子其余相感应电动势同理可得。所以转子感应电动势的表达式为
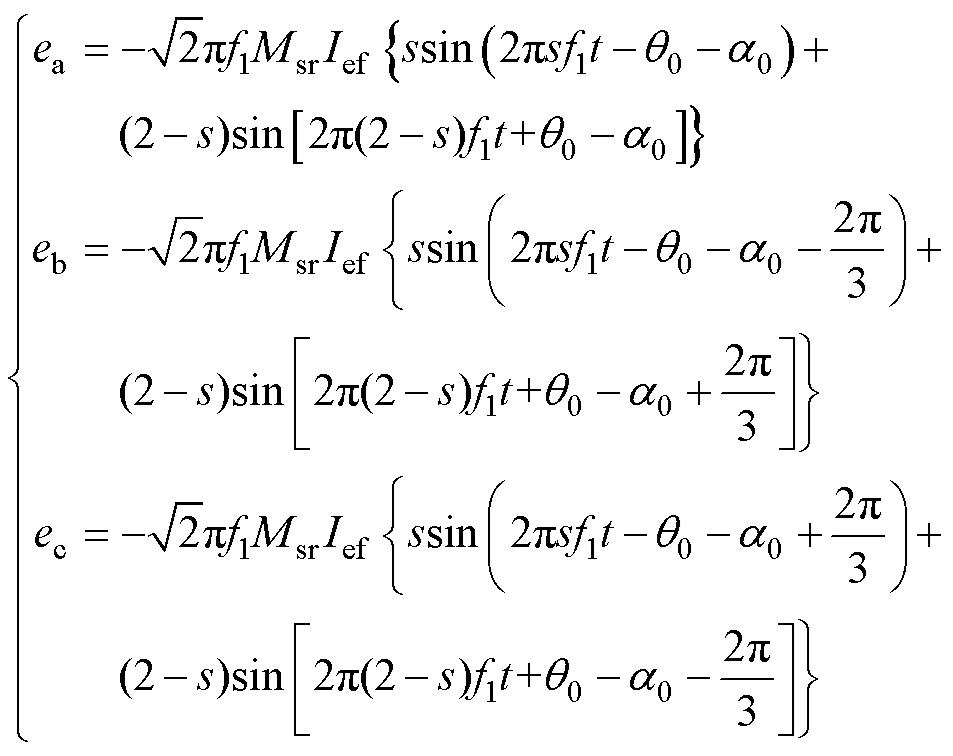 (8)
(8)
因此,单相交流励磁方式下ME电枢绕组的感应电动势是两个不同频率电动势的叠加,三相电枢感应电动势不对称。随着起动过程电机转速的变化,这两个电动势的幅值、频率都是在不断变化的。所以,ME的最终输出电压随转速的变化关系是比较复杂的。
根据式(8),单相交流励磁的转子感应电动势与ME参数(Rs、Lss、Msr)、励磁电源参数(Uef、f1)和电机转速(转差率s)有关。在完成电机设计后,ME参数为常数,而电机转速是由设计工况决定的,能够调整的变量只有励磁电源参数(Uef、f1)。因此,本节内容主要分析励磁电源参数对ME性能的影响。
ME和RR以及MG励磁绕组构成的无刷励磁系统是一个非线性、多变量、强耦合的系统。建立ME实际负载情况下的精确数学模型是比较复杂的。为了实现对单相ME无刷励磁系统性能的精确计算,采用了有限元+外电路的场路耦合仿真方法,即ME采用有限元方法建模,RR采用电路模型。根据表2,ME的结构是扁平、紧凑的,其径长比约为16 1,因此必须考虑其端部效应。三维有限元模型可以对电机绕组端部建模并实现性能的精确计算,但是其计算成本是高昂的。本文采用二维有限元模型,并在外电路中加入绕组的端部集总参数以提高模型的准确性[31-32]。在Ansys Maxwell中建立ME的二维有限元模型,如图5所示,外电路模型如图6所示。
1,因此必须考虑其端部效应。三维有限元模型可以对电机绕组端部建模并实现性能的精确计算,但是其计算成本是高昂的。本文采用二维有限元模型,并在外电路中加入绕组的端部集总参数以提高模型的准确性[31-32]。在Ansys Maxwell中建立ME的二维有限元模型,如图5所示,外电路模型如图6所示。
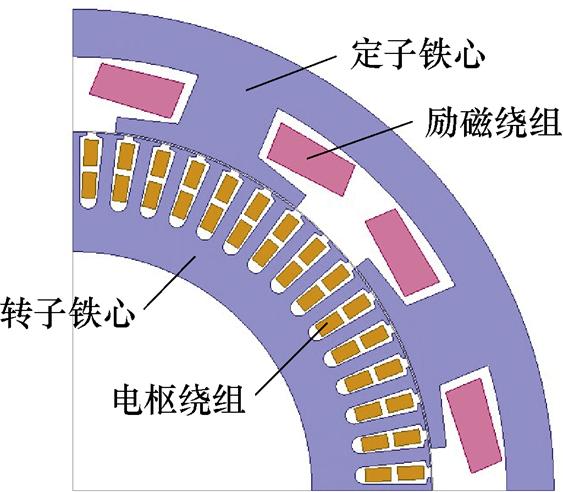
图5 单相ME二维有限元模型(1/4)
Fig.5 The 2D FE model of single-phase ME(1/4)
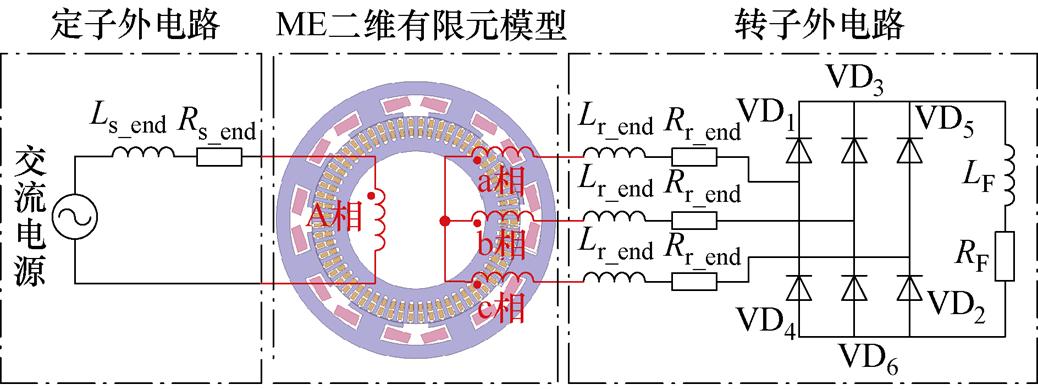
图6 单相ME外电路模型
Fig.6 The external circuit model of single-phase ME
外电路模型中,定、转子绕组与有限元模型中的绕组一一对应,Ls_end、Rs_end、Lr_end、Rr_end分别为定、转子绕组的端部漏感和端部电阻。MG励磁绕组可以用阻感性负载LF、RF来等效,其中LF为MG励磁绕组的励磁电感,RF为MG励磁绕组电阻。
下面采用有限元场路耦合仿真对ME实际负载情况下的性能进行详细计算和分析。主要关注的指标是ME的励磁电流Ief、输出电流IF、电磁转矩TME和励磁效率h。这里的励磁效率并不是指单独ME自身的效率,而是定义为ME单位输入励磁功率下向MG励磁绕组输出的有功功率,反映了ME定转子之间的能量传输效率[19]。ME励磁效率h的具体定义为
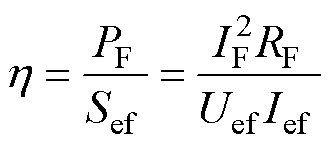 (9)
(9)
式中,PF为MG励磁绕组实际获得的有功功率;Sef为ME从励磁电源获取的总视在功率。
首先分析励磁电压的影响。根据式(6),励磁电压Uef的影响比较纯粹,仅影响励磁电流的幅值。励磁电压Uef越大,励磁电流幅值越大。根据式(2)、式(8),励磁电流幅值越大,建立的励磁磁动势幅值越大,转子感应电动势越大,那么输出电流也随之增大。
仿真计算时励磁频率f1设为400 Hz,对励磁电压Uef参数化,同时参数化电机转速,以探究励磁电压的影响规律,仿真结果如图7所示。
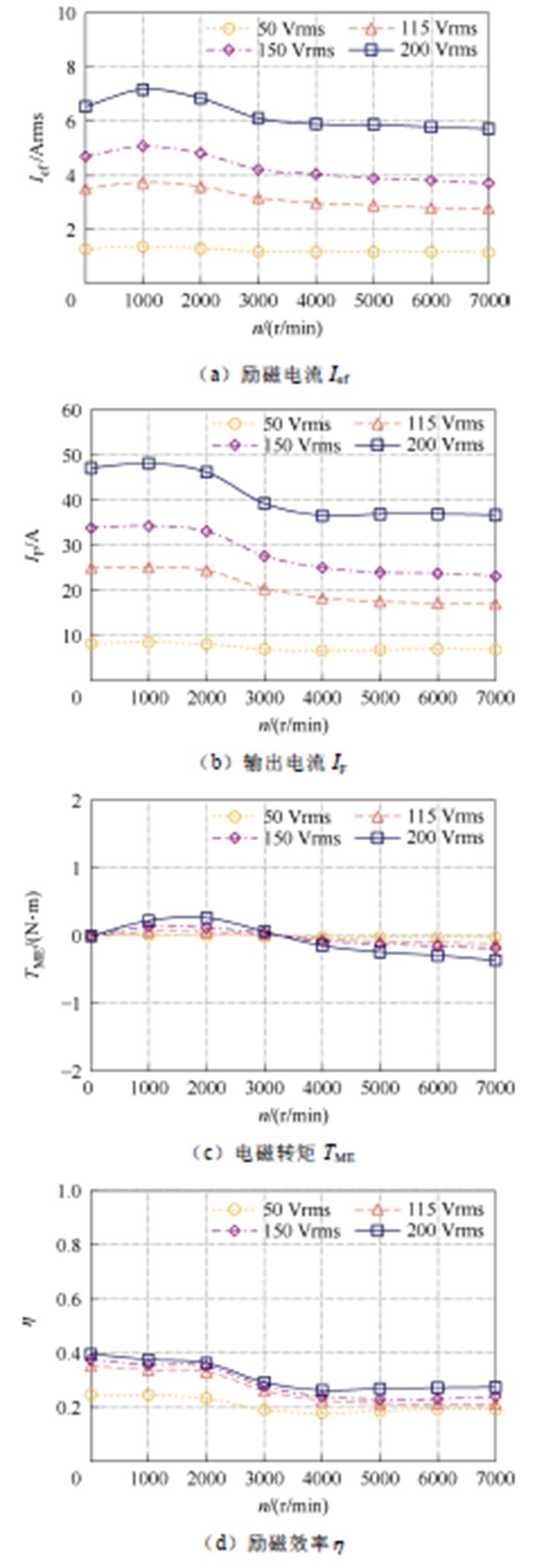
图7 不同励磁电压下的单相交流励磁性能参数
Fig.7 Single-phase AC excitation performance parameters under different excitation voltages
根据仿真结果,不同励磁电压Uef下,ME的Ief-n曲线、IF-n曲线具有相同的变化趋势,励磁电压Uef越大,同一转速下的ME励磁电流、输出电流基本呈线性增加。不同励磁电压Uef下,ME的h-n曲线基本不变,励磁电压Uef越大,同一转速下的励磁效率略有增大。在400 Hz励磁频率下,ME的电磁转矩基本为0。
因此,可以根据实际需求选择适当大一些的励磁电压。ME的交流励磁电源通常由SCU中的H桥逆变器提供,在270 V直流母线电压限制下,H桥逆变器输出的单相交流最大电压的有效值为190.9 V。ME也可以直接接入飞机交流电网获取励磁功率,在115 V/400 Hz交流供电体制下,ME可利用的最大电压是飞机电网的线电压,有效值为200 V。
接下来分析励磁频率f1的影响。受限于励磁功率电路20 kHz开关频率的限制,励磁频率的范围通常为0~1 000 Hz[33-34]。根据式(6)、式(8),励磁频率f1的影响是多方面的。一方面,励磁频率f1越大,ME励磁绕组的交流阻抗越大,励磁电流越小,使得产生的励磁磁动势幅值减小,会导致输出能力的下降;另一方面,电机转速是由设计指标规定的,而励磁频率f1的不同会使得转子在起动过程中的转差率不同,从而影响转子感应电动势的大小。
进行有限元场路耦合仿真,励磁电压设为115 Vrms,对励磁频率f1参数化(0~1 000 Hz),同时参数化电机转速,以探究励磁频率的影响规律。
不同励磁频率下的输出电流仿真结果如图8所示。励磁频率为0 Hz就是采用直流励磁的情况。根据仿真结果,在直流励磁方式下,ME输出电流与转速成正比,转速为0时输出也为0。在低速工况下,中高频的交流励磁具有更高的输出,在高速工况下,低频交流励磁以及直流励磁具有更高的输出。直流励磁方式与交流励磁方式的IF-n曲线存在交点,当转速低于交点时,交流励磁输出电流更高,当转速高于交点时,直流励磁输出电流更高。
从图8中可以发现另一个重要的特征,随着励磁频率的提高,IF-n曲线的变化趋势愈发平缓。当励磁频率足够高时,输出电流几乎不随转速变化而变化,呈现近似“恒流源”的特性。这表明通过选择合适的励磁频率,单相ME自身就可以在整个起动过程中保持输出电流近似恒定,而不依赖于外部励磁电源的调节。
为了更加清晰地探究励磁频率的影响,下面以励磁频率为横坐标自变量,保持励磁电压115 Vrms不变,分析励磁频率对ME各方面性能的影响规律,如图9所示。
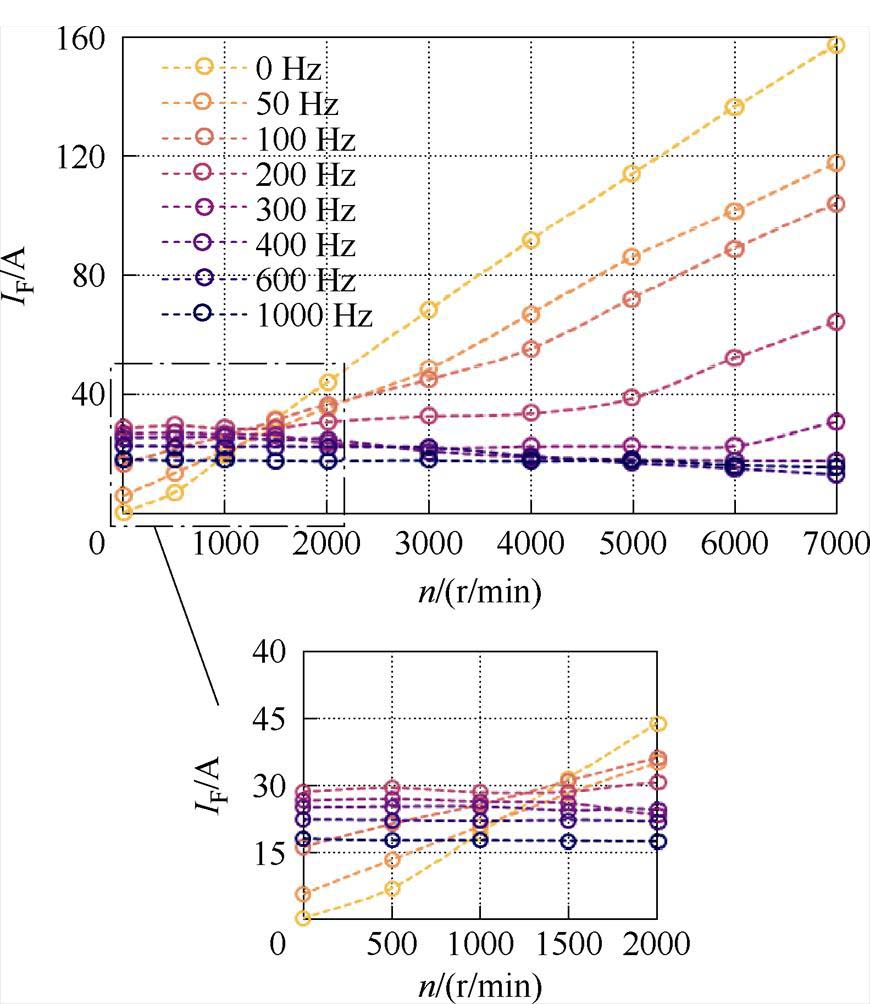
图8 不同励磁频率下的ME输出电流IF
Fig.8 The ME output current under different excitation frequencies
根据图9a,在相同励磁电压下,励磁频率较低时励磁绕组的交流阻抗小,励磁电流非常大,励磁电流密度过高会超出绕组线规的承受能力,烧毁电机。励磁频率越高,励磁电流越小。不同转速下都呈现出这样的特征。
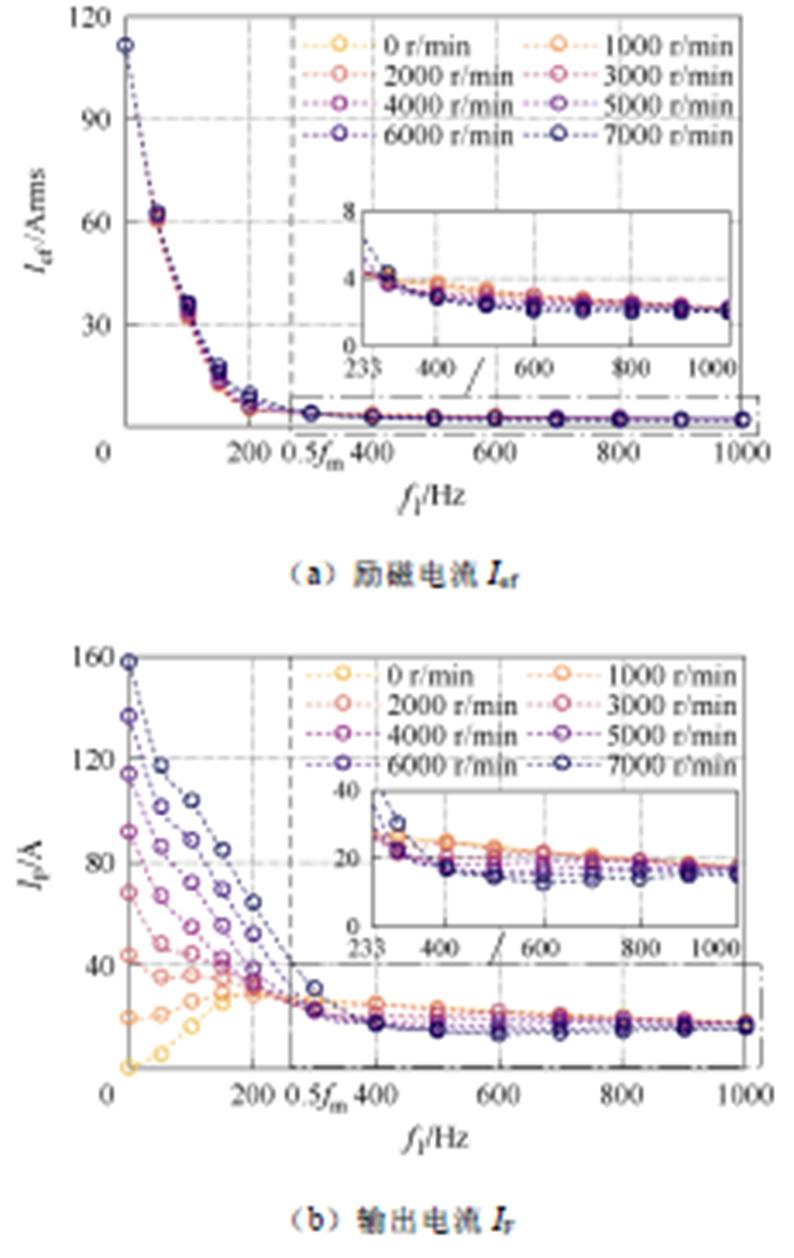
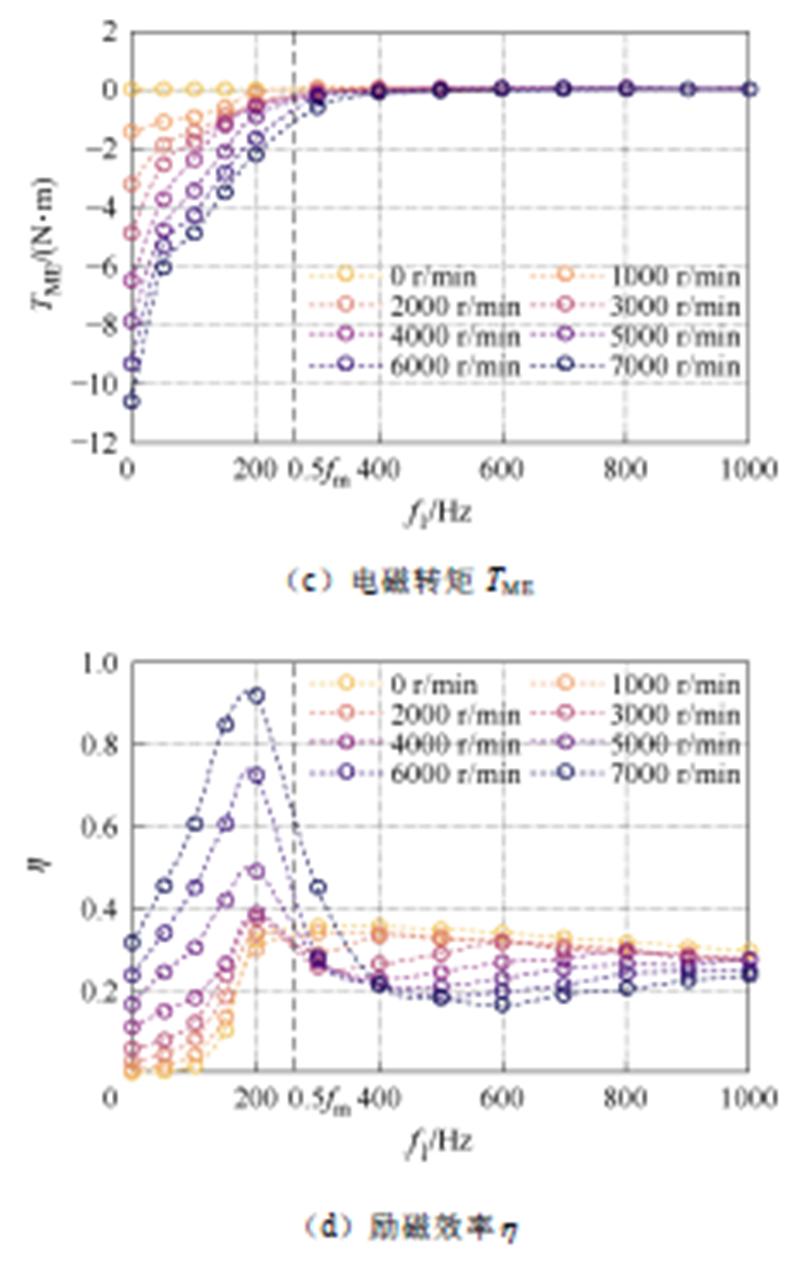
图9 不同励磁频率下的单相交流励磁性能参数(Uef=115 Vrms)
Fig.9 Single-phase AC excitation performance parameters under different excitation frequencies (Uef=115 Vrms)
根据图9b,励磁频率较低时励磁电流很大使得励磁磁动势幅值大,所以输出电流较大。但输出电流与转速具有强相关性,低频下的输出电流随转速增加明显增大,励磁频率越低,输出特性越接近直流励磁方式。因此,在低频单相交流励磁方式下也需要实时的励磁控制才能保持输出电流恒定。而当励磁频率足够高后,ME输出电流在不同转速下的变化范围明显减小,呈现出近似“恒流源”特性,且频率越高,不同转速下的输出电流变化范围越小,越接近理想“恒流源”。下面详细分析其原因。
设ME的起动转速范围为0~nm,若励磁频率足够高,则励磁磁动势的同步转速n1显著大于脱开转速nm,则不论起动过程中转速如何变化,转差率s始终接近于1,正转和反转磁动势产生的感应电动势分量基本是相等的,所以转子感应电动势式(8)的形式就退化为
 (10)
(10)
从而基本消除了转速的影响,因此转子感应电动势就只与励磁电压和励磁频率有关,基本不随转速变化,ME呈现出近似“恒流源”特性。
开始进入图9b中近似“恒流源”区的频率与ME的设计转速有关。本文中起动模式下的最大转速为脱开转速nm=7 000 r/min,对应的电频率fm= pnm/60=466.67 Hz。发现当励磁频率f1>0.5fm时基本可以认为ME进入了近似“恒流源”区,此时全转速范围内的输出电流变化范围不超过10 A。在近似“恒流源”区内,ME的转子感应电动势幅值为
 (11)
(11)
因此,在近似“恒流源”区内,励磁频率越高,转子感应电动势幅值越小,输出电流越小。
励磁频率对ME电磁转矩的影响可以根据转矩方程评估。
 (12)
(12)
结合上述分析,励磁频率越高,定子励磁电流和转子电枢电流均减小,因此电磁转矩必然减小。根据图9c,励磁频率较低时ME呈现出较大的阻转矩性质,且转速越高,阻转矩越大。这对整个电机的起动运行是不利的,进一步增大了起动阶段MG的负担。直流励磁(0 Hz)时的最大阻转矩为10.58 N·m,达到了最大起动转矩的13.56%,是不可忽视的。当励磁频率足够高进入近似“恒流源”区后,相应的阻转矩也大幅减小,基本为0。
根据图9d,低频下的励磁效率与转速具有强相关性。低频下的励磁磁动势转速较低,工作方式接近于同步电机,转速越高,输出电流越高,励磁效率越高。励磁频率足够高进入近似“恒流源”区后整体励磁效率较低,约为0.1~0.3。这是因为励磁频率足够高以后,正转、反转磁动势分量分别产生的转子感应电动势分量幅值近乎相等,反转磁动势分量的作用不可避免地带来效率的下降。
总结3.2节和3.3节的内容,结合第1节ME的性能要求,对于单相交流励磁方法,励磁电压和励磁频率的选择应当遵循以下原则:
(1)励磁频率对单相交流励磁特性有着关键影响。励磁频率应适当大于脱开转速对应电频率的一半,即0.5fm,以获得近似“恒流源”特性,此时ME的阻转矩也较小。但励磁频率也不宜过高,一方面是因为近似“恒流源”区内励磁频率越高ME的输出越低;另一方面也受到H桥逆变器开关频率的限制。
(2)选择合适的励磁频率后,再根据需要选择励磁电压,满足起动模式下MG的最大励磁需求即可。选择的励磁电压越高,ME的输出电流也越大,但励磁电压受到H桥逆变器直流母线电压的限制。
基于以上原则选择合适的励磁电压和励磁频率后,单相ME自身具有近似“恒流源”特性。ME的输出电流只与励磁电压幅值有关,而励磁电压幅值与H桥逆变器的正弦脉宽调制(Sinusoidal Pulse Width Modulation, SPWM)调制度M成正比,因此只需改变调制度M就可改变ME输出电流IF。
基于此特性,ME可以根据需要采用不同的励磁策略以适应起动需求:①可以在整个起动过程中采用“恒压恒频”的单相交流励磁策略,只需对ME给定励磁电压和频率即可,ME输出电流IF基本保持恒定,MG的起动控制可以参照永磁同步电机的相关方法;②在起动低速阶段采用“恒压恒频”交流励磁,在起动高速阶段采用“变压恒频”交流励磁以实现在线弱磁,即在起动高速阶段通过降低ME励磁电压幅值来降低MG励磁电流IF,以实现MG的高速弱磁,相比于在MG中注入弱磁电流进行弱磁具有更高的效率,也避免了励磁在线切换方法通过切换励磁方式进行弱磁的冲击问题[33-34]。ME励磁电压幅值的调节是非常方便的,只需改变SPWM的调制度M即可。起动模式下的单相交流励磁策略如图10所示。
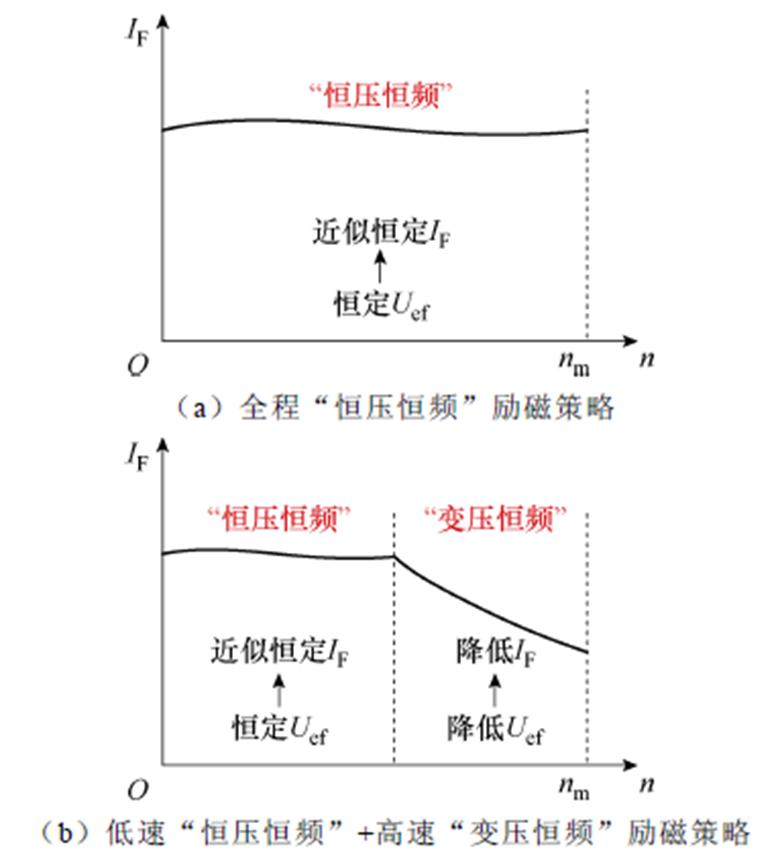
图10 起动模式下的单相交流励磁策略
Fig.10 Single-phase AC excitation strategy in the starting mode
综上所述,在较高励磁频率下,ME的正、反转励磁磁动势具有几乎均等的作用,从而抵消了单一旋转磁动势下ME输出电流的大幅变化,使得ME具有近似“恒流源”特性。这一特性是非常便利的,实现了起动模式下MG和ME控制的解耦,从而大幅简化了整个电机的起动控制。但也正由于几乎均势的正、反转磁动势分量同时存在,单相交流励磁方法的输出电流和励磁效率并不高,这是单相交流励磁方法的缺陷。
为了对本文研究内容进行直接验证,研制了一台特殊的12 kV·A WRSSG样机。相比于常规WRSSG,该样机引入了碳刷和集电环,同时RR也设置在电机外部,以便于直接测量转子侧的信号。样机中没有设置永磁副励磁机,实验时采用外部励磁电源供电。样机的实物如图11所示。
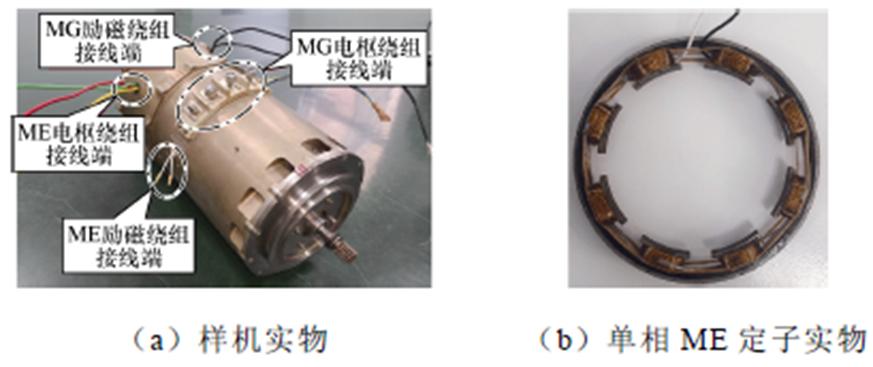
图11 12 kV·A WRSSG样机
Fig.11 The 12 kV·A WRSSG prototype
搭建了如图12所示的实验平台。拖动台用于为样机提供所需的转速。交流电源输出电压的频率范围为0~1 000 Hz,示波器型号为泰克DPO2014B,交直流电流探头型号为PT-710,精度为±2%,电压差分型号为PT-8002,精度为±2%。实验时拖动台转速为0~7 000 r/min,以模拟WRSSG的整个起动过程,实验原理如图13所示。实验时测量了ME励磁电压uef、励磁电流ief、输出电压uF、输出电流iF波形。
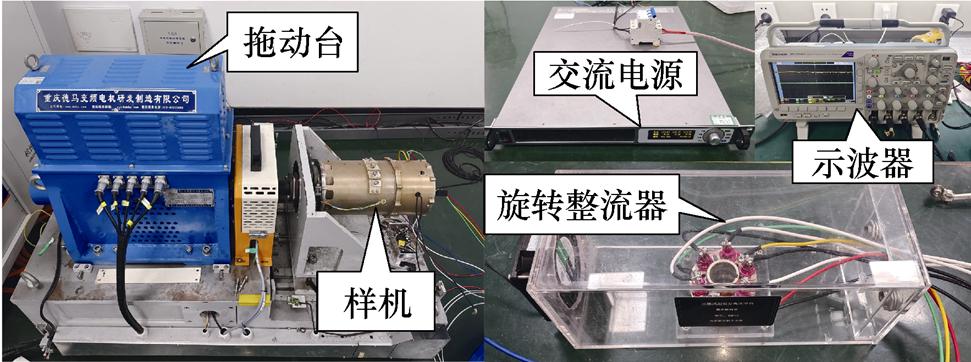
图12 实验平台
Fig.12 The experiment platform
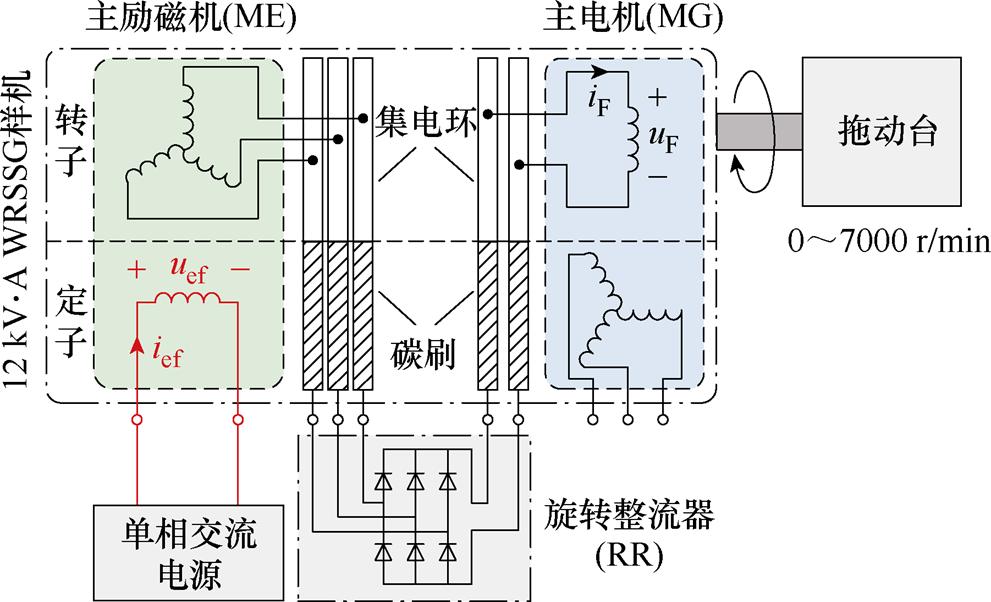
图13 实验原理
Fig.13 The schematic diagram of the experiment
励磁频率设为400 Hz,选取不同的励磁电压(50、115、150、200 Vrms)进行实验,测得不同励磁电压下的ME性能参数如图14所示。由于缺乏高精度转矩仪,因此未测量ME的电磁转矩。
由于电机嵌线工艺、装配误差以及起动实验过程中电机温度的上升,实测ME电枢电阻值和MG励磁电阻值均高于仿真数值,进而ME输出电流实测值比仿真值略低,励磁效率也略低于仿真值。但整体上,不同励磁电压下的ME性能参数变化规律与仿真基本一致。
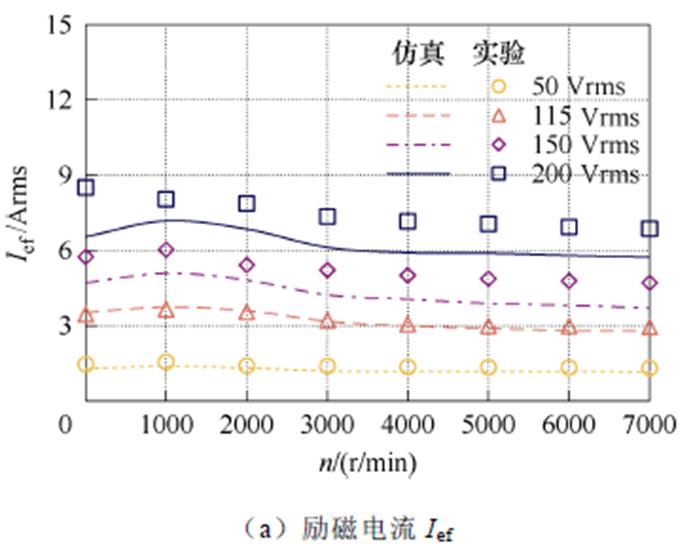
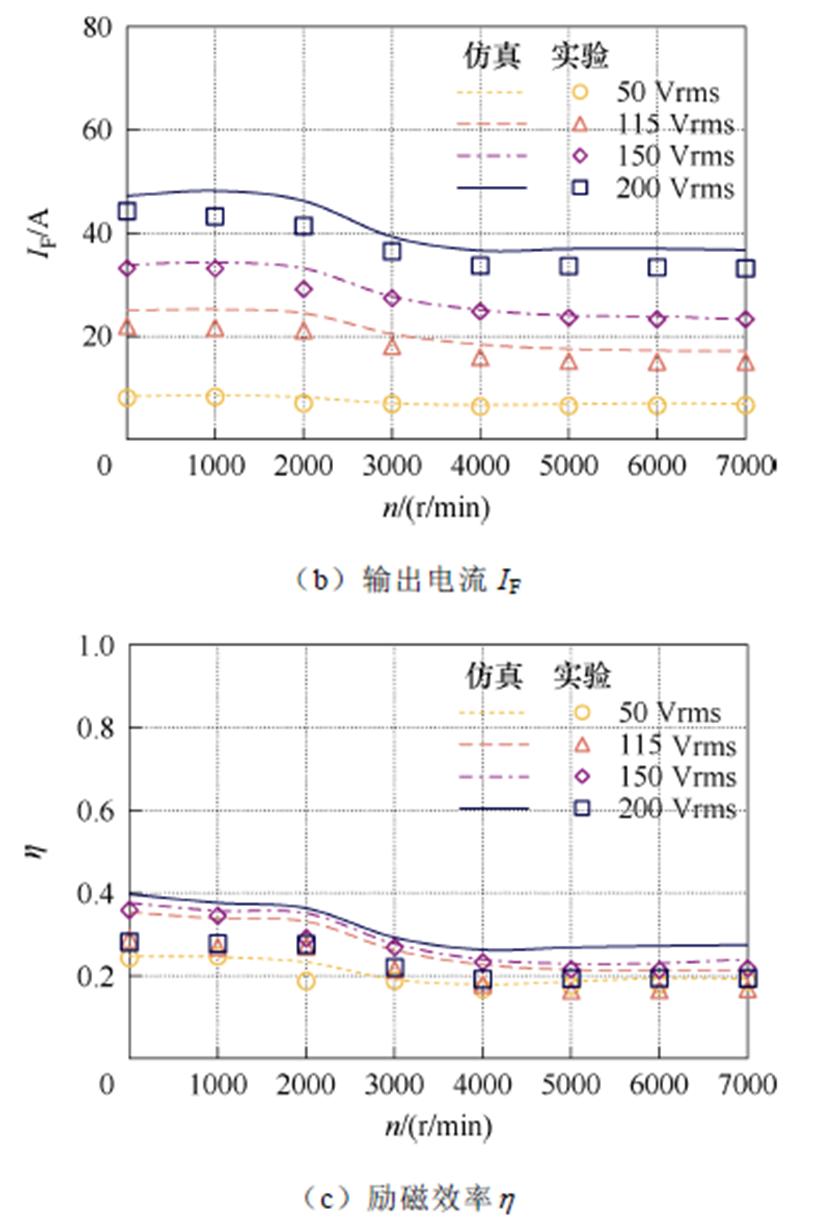
图14 不同励磁电压下的ME性能参数实验数据
Fig.14 Experimental data of ME performance parameters under different excitation voltages
励磁电压设为115 Vrms,选取不同的励磁频率(200~800 Hz)进行实验。由于低频下ME励磁电流过大,会使ME励磁绕组发热严重,因此实际实验时励磁频率最低只做到200 Hz。列出了0 r/min时200、400、600、800 Hz励磁频率下的实验波形和相应的仿真波形,如图15~图18所示。实验测得的不同励磁频率下的ME励磁电流Ief、输出电流IF、励磁效率h数据如图19所示。
实验波形与仿真波形基本一致,实际测得的ME励磁电流略高于仿真值,输出电流略低于仿真值,其差异原因是电机本身制造存在误差以及实验过程中温度变化的影响,与4.1节中的分析相同。将图19与图9对比,不同频率下的ME性能参数的变化规律与3.3节中的分析一致。
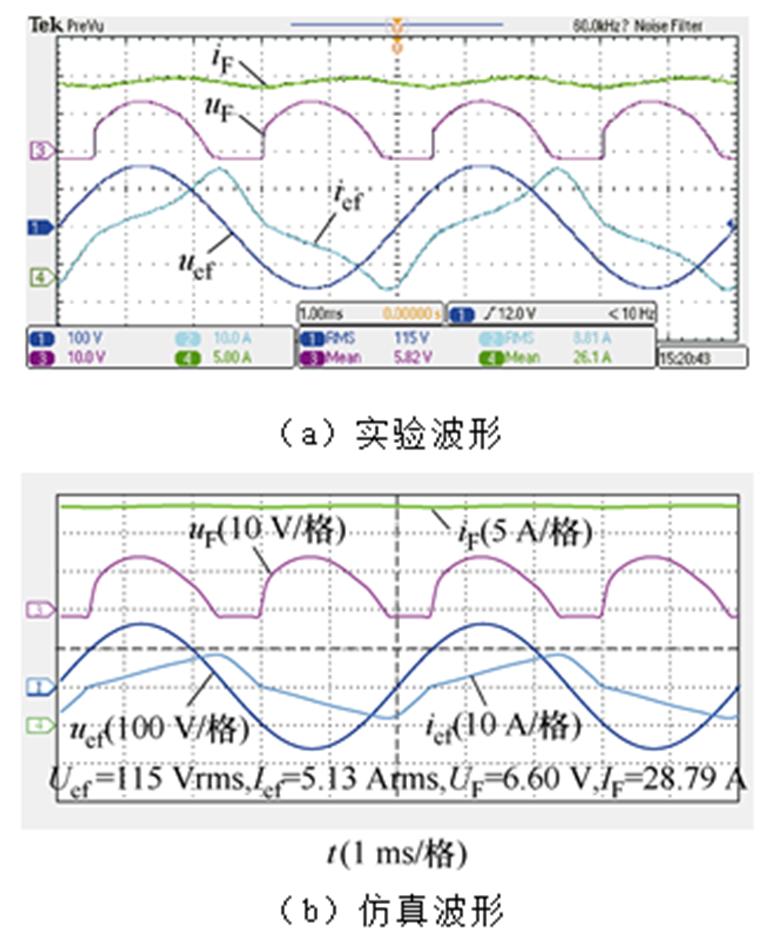
图15 200 Hz励磁频率下的ME波形
Fig.15 ME waveforms when f1=200 Hz
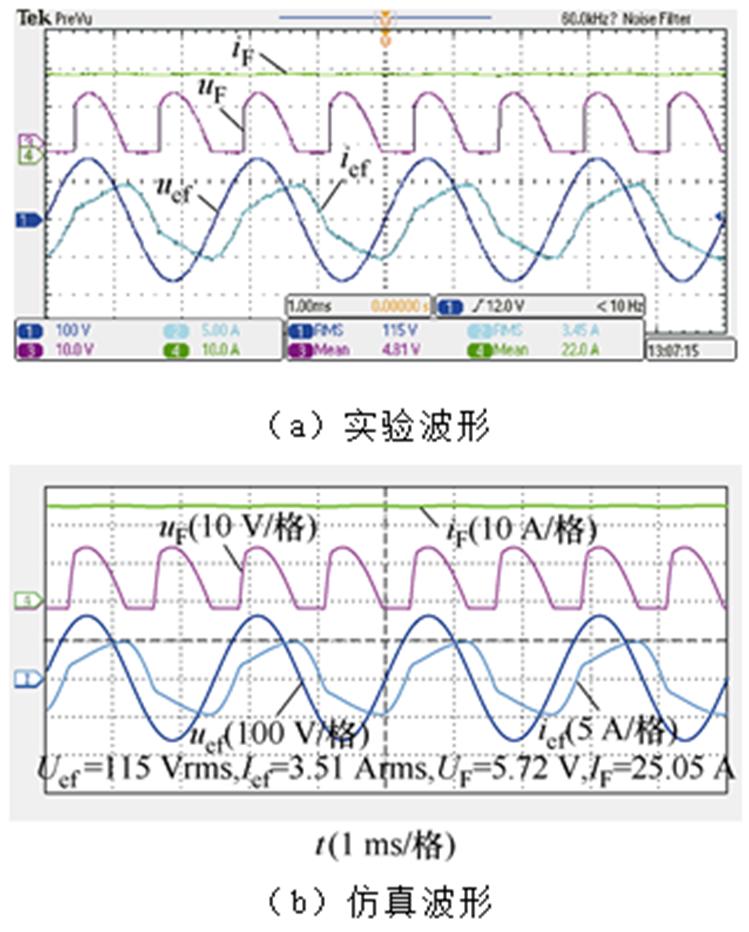
图16 400 Hz励磁频率下的ME波形
Fig.16 ME waveforms when f1=400 Hz
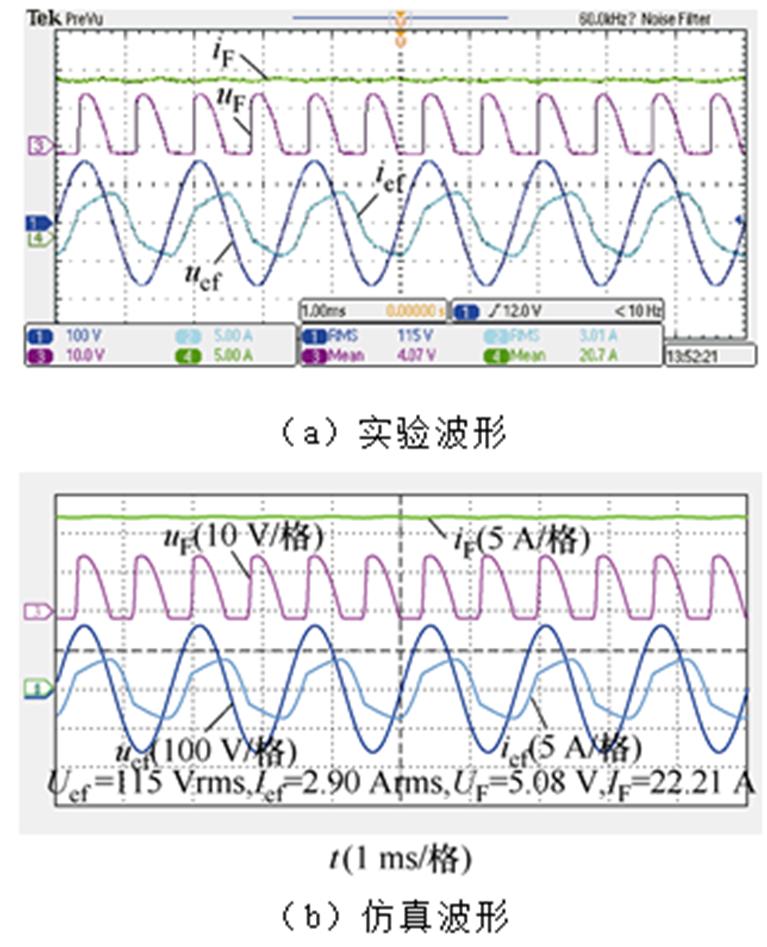
图17 600 Hz励磁频率下的ME波形
Fig.17 ME waveforms when f1=600 Hz
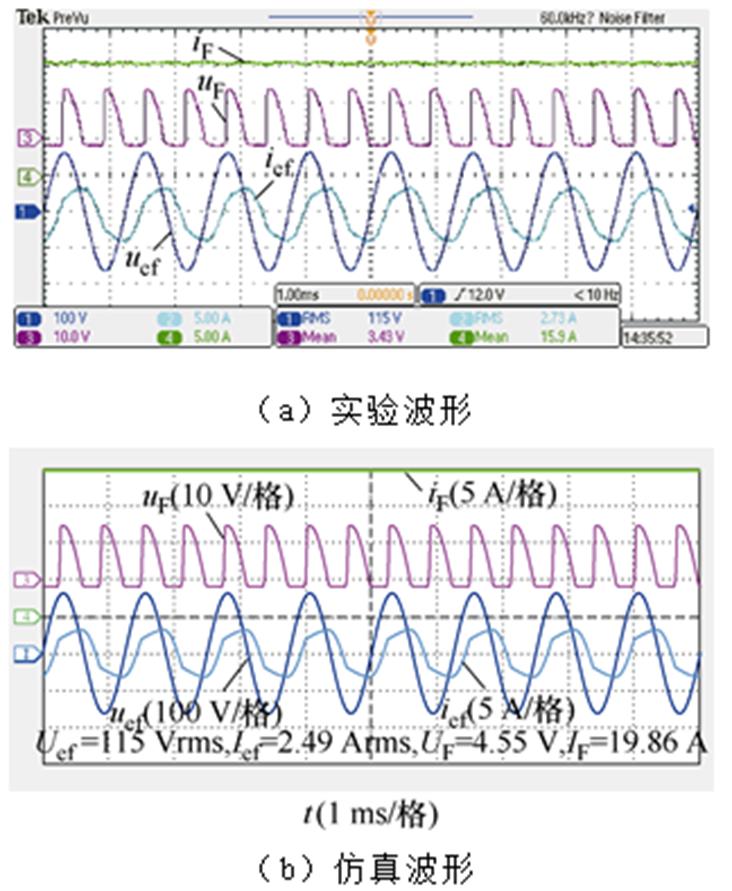
图18 800 Hz励磁频率下的ME波形
Fig.18 ME waveforms when f1=800 Hz
总结4.1节和4.2节,实验与仿真结果吻合度较高,变化趋势相同,证明了本文建立的有限元场路耦合仿真模型的准确性,也验证了文中分析的规律。
本文分析了单相交流励磁方法的基本原理,并通过有限元场路耦合仿真解析了其工作特性,研究了励磁电压和励磁频率对ME关键性能参数的影响规律。通过仿真和实验,可以得出以下结论:
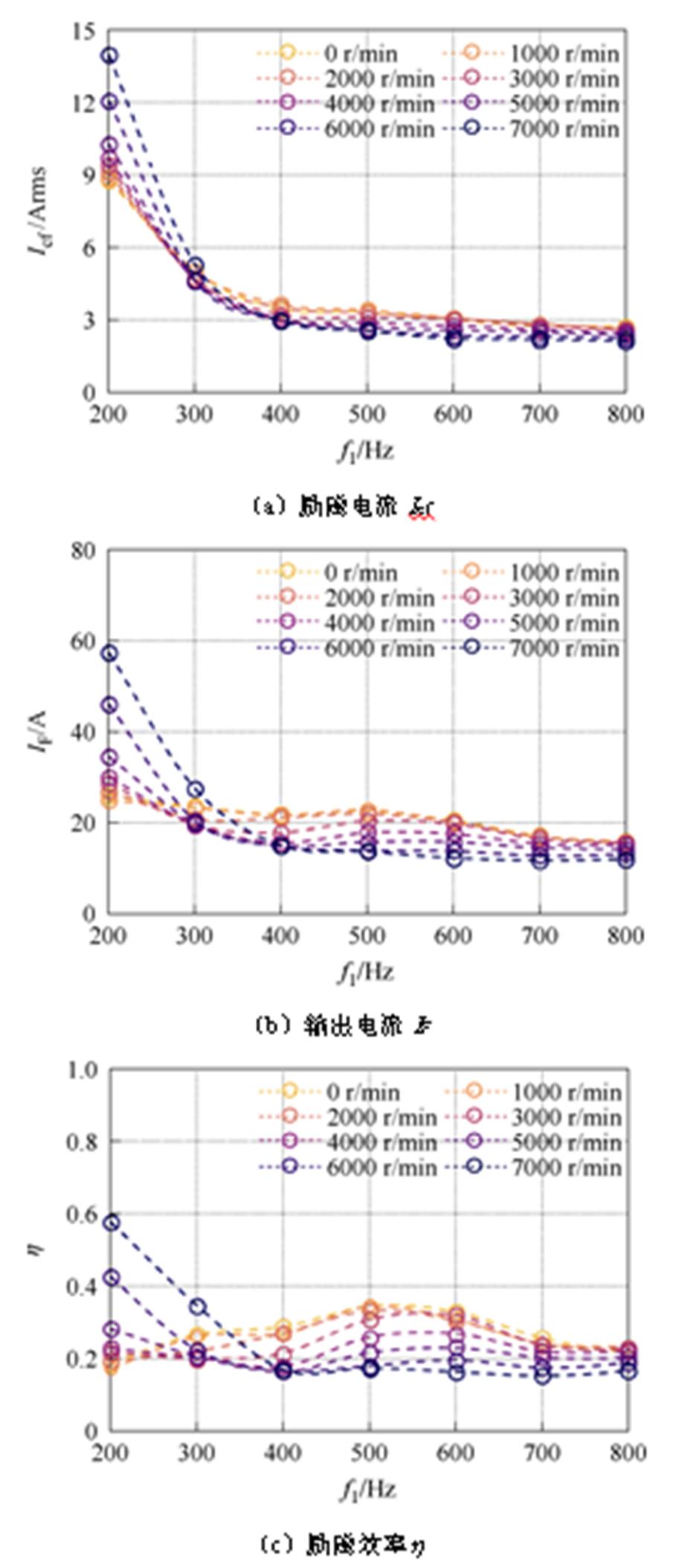
图19 不同励磁频率下的ME性能参数实验数据
Fig.19 Experimental data of ME performance parameters under different excitation frequencies
1)励磁频率对单相交流励磁特性有着关键影响。当f1>0.5fm时,ME具有近似“恒流源”特性,ME自身即可在整个起动过程中保持输出电流近似恒定,而无需外部励磁电源的实时调节。
2)当ME具有近似“恒流源”特性时,ME产生的阻转矩也较小,接近0,减轻了起动过程中MG的负担。
3)当ME具有近似“恒流源”特性时,ME的输出电流和励磁效率不高,励磁效率约为0.1~0.3。
4)励磁电压不会改变单相交流励磁方法输出电流随转速的变化趋势,励磁电压越高,ME输出电流越大,而励磁效率变化不大。
总体而言,在适当的励磁条件下,单相交流励磁方法具有近似“恒流源”特性,无需对ME进行实时的励磁调节,简化了MG的起动控制,易于实施。针对多电飞机的应用场合,单相交流励磁方法可以在不改变ME拓扑的基础上,实现起动发电一体化,有效降低了起飞质量,减少航行成本,具有良好的实用性。但单相交流励磁方法存在输出电流和励磁效率偏低的缺点,还需结合单相ME的起动发电一体化综合优化设计以实现更好的励磁效果。
参考文献
[1] Sarlioglu B, Morris C T. More electric aircraft: review, challenges, and opportunities for commercial transport aircraft[J]. IEEE Transactions on Trans- portation Electrification, 2015, 1(1): 54-64.
[2] 付兴贺, 江政龙, 吕鸿飞, 等. 电励磁同步电机无刷励磁与转矩密度提升技术发展综述[J]. 电工技术学报, 2022, 37(7): 1689-1702.
Fu Xinghe, Jiang Zhenglong, Lü Hongfei, et al. Review of the blushless excitation and torque density improvement in wound field synchronous motors[J]. Transactions of China Electrotechnical Society, 2022, 37(7): 1689-1702.
[3] 张卓然, 于立, 李进才, 等. 飞机电气化背景下的先进航空电机系统[J]. 南京航空航天大学学报, 2017, 49(5): 622-634.
Zhang Zhuoran, Yu Li, Li Jincai, et al. Key tech- nologies of advanced aircraft electrical machine systems for aviation electrification[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2017, 49(5): 622-634.
[4] 李进才, 李涵琪, 张卓然, 等. 航空油冷三级式无刷发电机流固耦合传热研究及散热优化[J]. 电工技术学报, 2024, 39(22): 7030-7044.
Li Jincai, Li Hanqi, Zhang Zhuoran, et al. Research on fluid-solid coupling heat transfer and optimization of heat dissipation in the aircraft oil-cooled wound rotor synchronous generator[J]. Transactions of China Electrotechnical Society, 2024, 39(22): 7030-7044.
[5] Jiao Ningfei, Li Zijie, Mao Shuai, et al. Aircraft brushless wound-rotor synchronous starter-generator: a technology review[J]. IEEE Transactions on Power Electronics, 2023, 38(6): 7558-7574.
[6] Xu Mingzhou, Pearson W T, Anghel C E, et al. Gas turbine engine starter generator with switchable exciter stator windings: US6768278[P]. 2004-07-27.
[7] Xu Mingzhou, Pearson W T, Anghel C E, et al. Gas turbine engine starter generator with multiple windings on each exciter stator pole: US6906479[P]. 2005- 06-14.
[8] Li Jincai, Zhang Zhuoran, Lu Jiawei, et al. Investi- gation and analysis of a new shaded-pole main exciter for aircraft starter-generator[J]. IEEE Transactions on Magnetics, 2017, 53(11): 8209604.
[9] Li Jincai, Zhang Zhuoran, Lu Jiawei, et al. Design and characterization of a single-phase main exciter for aircraft wound-rotor synchronous starter-generator[J]. IEEE Transactions on Magnetics, 2018, 54(11): 8206805.
[10] 蔡正友, 魏佳丹, 胡文枝, 等. 基于改进同步解调方式的三级式同步电机无位置传感器起动控制[J]. 电工技术学报, 2024, 39(14): 4353-4365.
Cai Zhengyou, Wei Jiadan, Hu Wenzhi, et al. Sensorless starting control of three-stage synchronous machines based on improved synchronous demodu- lation scheme[J]. Transactions of China Electro- technical Society, 2024, 39(14): 4353-4365.
[11] Shilling W J, Baker D E. Starter generator system with two stator exciter windings: US4743777[P]. 1988-05-10.
[12] Taneja D N, Huang Hao, Padgett G A, et al. Dual- structured aircraft engine starter/generator: US7687928[P]. 2010-03-30.
[13] Waters M L. Field excitation system for synchronous machines utilizing a rotating transformer brushless exciter generating combination: US3908161[P]. 1975- 09-23.
[14] Dhyanchand P J. Excitation system for a brushless generator having separate AC and DC exciter field windings: US4939441[P]. 1990-07-03.
[15] Huang Hao, Karipides D, Abbas M, et al. Aircraft engine starter/generator and controller: US7508086[P]. 2009-03-24.
[16] Glennon T F, Mehl B R, Thollot P, et al. Brushless generator having AC excitation in generating and starting modes: US5068590[P]. 1991-11-26.
[17] Huang Hao, Gataric S, Karipides D D, et al. Aircraft engine starting/generating system and method of control: US8148834[P]. 2012-04-03.
[18] 郑晔明, 张建忠. 基于单母线电流传感器的三相永磁同步电机驱动方法[J]. 电工技术学报, 2023, 38(19): 5164-5175.
Zheng Yeming, Zhang Jianzhong. A single DC-link current sensor drive technology of three-phase per- manent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2023, 38(19): 5164- 5175.
[19] Griffo A, Wrobel R, Mellor P H, et al. Design and characterization of a three-phase brushless exciter for aircraft starter/generator[J]. IEEE Transactions on Industry Applications, 2013, 49(5): 2106-2115.
[20] Zhang Zan, Liu Weiguo, Zhao Dongdong, et al. Steady-state performance evaluations of three-phase brushless asynchronous excitation system for aircraft starter/generator[J]. IET Electric Power Applications, 2016, 10(8): 788-798.
[21] Jiao Ningfei, Liu Weiguo, Zhang Zan, et al. Field current estimation for wound-rotor synchronous starter-generator with asynchronous brushless exciters[J]. IEEE Transactions on Energy Conversion, 2017, 32(4): 1554-1561.
[22] Deriszadeh A, Ćalasan M P, Alaei A, et al. A novel field current estimation method for brushless wound- field synchronous machine[J]. IEEE Transactions on Transportation Electrification, 2022, 8(3): 3524-3533.
[23] Jiao Ningfei, Liu Weiguo, Meng Tao, et al. Design and control of a two-phase brushless exciter for aircraft wound-rotor synchronous starter/generator in the starting mode[J]. IEEE Transactions on Power Electronics, 2016, 31(6): 4452-4461.
[24] Jiao Ningfei, Liu Weiguo, Meng Tao, et al. Detailed excitation control methods for two-phase brushless exciter of the wound-rotor synchronous starter/generator in the starting mode[J]. IEEE Transactions on Indu- stry Applications, 2017, 53(1): 115-123.
[25] 焦宁飞. 基于两相励磁机的多级式无刷同步起动/发电系统起动阶段关键技术研究[D]. 西安: 西北工业大学, 2017.
Jiao Ningfei. Research on key technologies of multi-stage brushless synchronous starter/generator based on two-phase exciter in the starting mode[D]. Xi’an: Northwestern Polytechnical University, 2017.
[26] Rozman G I, Markunas A L, Nuechterlein P E. Starter/ generator system with variable-frequency exciter control: US5594322[P]. 1997-01-14.
[27] 马鹏. 航空无刷同步起动/发电系统的起动控制技术[D]. 西安: 西北工业大学, 2016.
Ma Peng. Starting control techniques of aviation brushless synchronous integrated starter/generator system[D]. Xi’an: Northwestern Polytechnical University, 2016.
[28] Deriszadeh A, Karabasoglu O, Baris Ozturk S. Exci- tation procedure for brushless wound-rotor synchronous starter generator with seamless transitions[J]. IET Power Electronics, 2019, 12(11): 2873-2883.
[29] 魏佳丹, 杨溢炜, 周波, 等. 三级式同步电机起动过程交直流励磁一体化控制[J]. 电工技术学报, 2015, 30(10): 138-146.
Wei Jiadan, Yang Yiwei, Zhou Bo, et al. The integrated AC-DC excitation control method for the three-stage synchronous machine in the starting processing[J]. Transactions of China Electrotechnical Society, 2015, 30(10): 138-146.
[30] 杨溢炜. 三级式同步电机的起动控制策略研究[D]. 南京: 南京航空航天大学, 2013.
Yang Yiwei. Starting control strategy for a three stage synchronous machine[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2013.
[31] Nuzzo S, Bolognesi P, Decuzzi G, et al. A consequent- pole hybrid exciter for synchronous generators[J]. IEEE Transactions on Energy Conversion, 2021, 36(1): 368-379.
[32] 汪波, 徐文翰, 查陈诚, 等. 多三相分布式绕组和集中式绕组永磁磁阻电机对比研究[J]. 电工技术学报, 2024, 39(10): 2984-2994.
Wang Bo, Xu Wenhan, Zha Chencheng, et al. Comparative study on triple 3-phase PMA-SynRM with distributed winding and concentrated winding[J]. Transactions of China Electrotechnical Society, 2024, 39(10): 2984-2994.
[33] Qu Zhaoyang, Zhang Zhuoran, Li Jincai, et al. Investigation of nonlinear PI multi-loop control strategy for aircraft HVDC generator system with wound rotor synchronous machine[J]. CES Transa- ctions on Electrical Machines and Systems, 2023, 7(1): 92-99.
[34] 石珩. 航空三级式同步电机高压直流起动发电系统控制技术研究[D]. 南京: 南京航空航天大学, 2024.
Shi Heng. Research on control technologies of three-stage brushless synchronous machine for aircraft HVDC starter/generator system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2024.
Abstract The single-phase AC excitation method is one of the leading solutions to the excitation problem during the starting process of the wound rotor synchronous starter/generator (WRSSG). It does not need to change the structure of the main exciter (ME), has low requirements for the excitation power supply, and is easy to implement. The single-phase AC excitation method transfers energy to the rotor side through a pulsating magnetic field. Due to the presence of nonlinear components in the ME rotor circuit, the operating mechanism of the circuit is complex. After analyzing the basic principles and working characteristics of single-phase AC excitation methods, this paper proposes starting excitation strategies.
Firstly, the performance requirements for ME in the starting mode are proposed, and the parameters of the 12 kV·A WRSSG are introduced. Then, similar to a single-phase asynchronous motor, the ideal mathematical model of a single-phase ME is established, and the ME's no-load rotor EMF is derived.
The brushless excitation system, composed of the ME, rotating rectifier (RR), and main generator (MG) field winding, is a nonlinear, multivariable, and strongly coupled system. To accurately calculate the performance of the single-phase ME brushless excitation system, a field-circuit coupling simulation model is established. ME is modeled using the finite element (FE) method, while RR and MG field windings use a circuit model. Through parameterized simulation, the influence of the excitation voltage Uef and the excitation frequency f1 on the performance characteristics of the single-phase AC excitation method is explored.
Simulation results show that the higher the excitation voltage Uef, the higher the ME excitation current Ief and ME output current IF. The excitation efficiency η slightly increases as Uef increases. Moreover, Uef does not influence the variation trend of the ME output current IF with the machine speed n. The excitation frequency f1 has a significant influence on the characteristics of the single-phase AC excitation method. When the excitation frequency is low, the IF-n curve of ME is close to that of DC excitation, and IF increases with the increase of n. When the excitation frequency is high enough, the ME output current almost does not vary with speed changes, a characteristic known as an approximate “constant current source”. In this condition, the electromagnetic torque of ME is minimal, close to 0, but the output current and excitation efficiency are not high. Accordingly, two single-phase AC excitation strategies are proposed: (1) Using the “constant voltage and constant frequency” strategy throughout the whole starting process. (2) Using the “constant voltage and constant frequency” AC excitation in the low-speed stage, and using the “variable voltage and constant frequency” AC excitation in the high-speed stage to achieve online flux weakening.
Finally, a 12 kV·A WRSSG prototype is manufactured. The experiments involving different speeds, excitation voltages, and excitation frequencies are carried out. The results align well with the simulation results, proving the accuracy of the established FE field-circuit coupling simulation model.
The following conclusions can be drawn. (1) When f1 is greater than 0.5fm, the ME has the characteristics of an approximate “constant current source”, without the need for real-time adjustment of the external excitation power supply. (2) When f1 is greater than 0.5fm, the drag torque generated by ME is small, which reduces the burden of MG during the starting process. (3) The output current and excitation efficiency of the ME are not high, and the excitation efficiency is about 0.1 to 0.3.
Keywords:Wound rotor synchronous machine (WRSM), brushless excitation system, main exciter, single- phase AC excitation, finite element analysis
中图分类号:TM341
DOI: 10.19595/j.cnki.1000-6753.tces.250338
航空科研基金资助项目(20230007052001)。
收稿日期 2025-03-04
改稿日期 2025-03-25
李立强 男,1997年生,博士研究生,研究方向为航空三级式无刷起动发电机系统设计与优化。
E-mail: liliqiang@nuaa.edu.cn
张卓然 男,1978年生,教授,博士生导师,研究方向为航空电源系统、新能源发电与电驱动技术。
E-mail: apsc-zzr@nuaa.edu.cn(通信作者)
(编辑 崔文静)