 ,S2x、
,S2x、 ,S3x、
,S3x、 ,S4x、
,S4x、 与Cfx表示,x=a, b, c表示三相,Ufx为飞跨电容的电压,额定工作值为Udc/3,三相输出电流为iox。为了保证HCC正常工作,需要满足以下控制原理:
与Cfx表示,x=a, b, c表示三相,Ufx为飞跨电容的电压,额定工作值为Udc/3,三相输出电流为iox。为了保证HCC正常工作,需要满足以下控制原理:摘要 混合式钳位变换器(HCC)因其具有结构简单、电流谐波低、器件数目少等特点,在中高压变频调速系统中具有良好的应用前景。然而,HCC在低频下存在直流母线电容电压剧烈波动,在高频下存在母线电压利用率不高等问题。该文首先建立基于负载电流闭环控制下的HCC数学模型,阐明了母线电容电压波动形成的机制,提出一种基于电容电压差值提取的闭环共模电压注入平衡方法,进而实现低频下工况自适应的电容剧烈波动抑制;其次在高频工况下提出一种三倍频共模电压角度补偿策略,提高直流母线电压利用率并兼顾电容电压平衡能力;最后通过仿真与实验对所提方法进行了验证。结果表明,所提方法比开环共模电压方法在宽频范围内具有更强的电容电压波动抑制效果,且能在0 Hz极端工况下稳定工作;在高频工况注入角度补偿后,直流母线电压利用率提高约14%。
关键词:混合式钳位变换器 电容电压平衡 闭环共模电压注入 角度补偿
多电平变换器因其高电压、低谐波、高效率等特点,被广泛应用于飞机与船舶电气化、工业电机驱动、新能源并网等领域[1-4]。在多电平变换器中,混合式钳位变换器(Hybrid Clamped Converter, HCC)是一种新型且极具前景的变换器。相较于中性点钳位变换器、模块化多电平变换器、飞跨电容变换器等结构,HCC具有控制自由度高和器件数量少的优势,与五电平有源中性点钳位变换器相比,HCC避免了开关管串联的问题,且各器件电压应力分布均匀[5-8]。
然而,HCC控制的主要难点在于需将所有电容电压稳定控制在直流母线电压的1/3,以保证高品质电压电流输出[9-10]。在变速驱动应用中,一方面需要考虑在极低速甚至零速下高转矩电流输出工况,系统极易因输出电流频率降低导致电容充放电时间变长而产生剧烈的电容电压波动[11-13];另一方面,在电机高速变载阶段,共模电压的注入容易引起母线电压饱和,进而导致母线电压利用率降低和输出功率降低[14]。这两个问题易导致系统输出电流发生畸变,严重时造成系统紊乱。
近年来,已有许多方法被提出用于解决HCC电容电压不平衡问题[15-17],文献[18-19]采用模型预测控制(Model Predictive Control, MPC)提高了HCC响应速度,在实现低电流畸变和小电压振荡的同时可较好地平衡电容电压。然而,MPC方法对系统参数的敏感度较高。另外,针对低开关频率的应用场景,文献[20]提出了适用于HCC的选择谐波消除控制方法,该方法利用HCC冗余开关状态和改变开关角平衡了电容电压,但其未涉及HCC低频下的波动抑制问题。
解决电容电压不平衡问题的另一种思路是注入零序(共模)电压。文献[21]采用零序电压注入法实现了各电容电压的平衡,但未考虑低频下电容电压波动的问题。2019年,有研究者提出采用共模电压注入法来抑制低频下的电容电压波动,但共模电压注入频率与幅值较大,在负载侧易引起较大的共模干扰且降低母线电压利用率[22]。随后,有学者进一步提出一种基于开环三倍频共模电压注入的方法来平衡电容电压[23],具有控制简单和传感器使用少的优势,并取得了良好的低频波动抑制效果。然而该方法难以在0 Hz工况下应用,在负载闭环下因电压参考波形畸变可能导致电容不稳定;另一方面在高频高调制比下,该方法未考虑由于功率因数角引入带来的三倍频叠加畸变问题,导致母线电压利用率降低。文献[24]将HCC看作两电平与三电平变换器的组合,结合零序电压注入,提出一种不需要载波移相的调制方式,实现了低频与工频下电容电压的平衡,但该方法生成参考波过程复杂,同时增加了电流总谐波畸变率(Total Harmonic Distortion, THD)。
基于以上分析,本文提出了一种基于电容电压差值提取的闭环共模电压注入的HCC控制方法,所提方法可实现HCC变频调速系统在极低频率下(0 Hz)和宽频域强工况下的电容电压平衡方法。本文首先对HCC系统进行数学建模,分析了中性点电流与直流母线电容电压波动的关联关系,提出了基于电容电压差值提取的闭环共模电压注入控制方法;其次针对高频下共模电压注入法易出现过调制而引起输出电压饱和的问题,进一步提出共模电压角度补偿策略,避免共模电压注入导致过调制,提高了直流母线电压利用率。最后通过构建中高压3.6 kV/500 kV·A HCC仿真系统和300 V/1.5 kV·A三相HCC实验平台对所提出方法的有效性进行了验证。
图1为三相HCC拓扑结构,Udc为直流母线电压,三个直流母线电容从上至下分别为上直流母线电容C1、中直流母线电容C2、下直流母线电容C3,其电容电压分别用U1、U2、U3表示,三个直流母线电容被三相共用,每个电容容值相同且额定工作电压值为Udc/3;i1、i2、i3分别为流过3个直流母线电容的电流;N1与N2为中直流母线电容两端的中性点,in1和in2分别为流过N1与N2的电流。每相包含四组功率器件与一个飞跨电容,分别用S1x、,S2x、,S3x、,S4x、与Cfx表示,x=a, b, c表示三相,Ufx为飞跨电容的电压,额定工作值为Udc/3,三相输出电流为iox。为了保证HCC正常工作,需要满足以下控制原理:
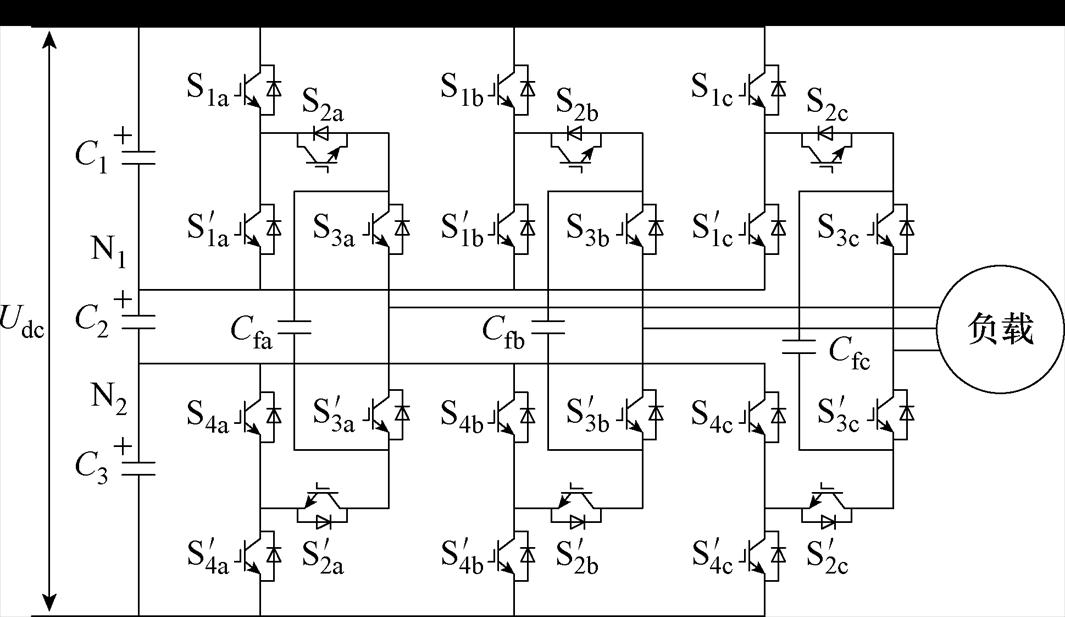
图1 三相HCC拓扑结构
Fig.1 Three-phase HCC topology
(1)四组开关S1x、,S2x、,S3x、,S4x、,每组中的两个开关应为互补状态,且S1x与S4x开关状态相同,其余开关独立控制。
(2)为了正常输出四电平,直流母线电容与飞跨电容满足C1=C2=C3=Cfx=C,C为所有电容容值。各电容额定电压应为Udc/3,所有开关器件电压分布均为Udc/3。
HCC通常采用移相载波脉冲宽度调制(Phase- Shifted Pulse Width Modulation, PS-PWM)实现控制。基于此方法,每相开关的逻辑值由该相参考波urefx与一组相位相差120°的载波进行比较生成,即每相的四组开关共用一个参考波,则开关S1x、S2x、S3x的参考波urefx1、urefx2、urefx3可以表示为
 (1)
(1)
每相流过中直流母线电容的电流i2x与流过每相飞跨电容的电流ifx可分别表示为
 (2)
(2)
 (3)
(3)
式中,S为所对应开关的开关状态,开通时S=1;反之,S=0。
对中性点N1与N2列写KCL方程后可得三相中性点电流inx表达式为
 (4)
(4)
式中,i1x与i3x为三相流过电容C1与C3的电流;in1x与in2x分别为流过开关S1x和开关S4x的电流。
一般情况下,载波频率远高于输出电压参考波频率,一个载波频率范围内参考波可视为一个常数,基于以上分析,中性点总电流intotal表示为
 (5)
(5)
 (6)
(6)
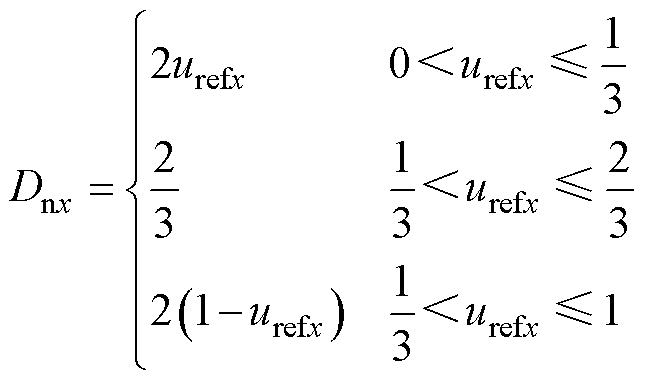
式中,Dnx为三相 开关信号的占空比,结合负载电流和参考电压即可获得中性点总电流。
开关信号的占空比,结合负载电流和参考电压即可获得中性点总电流。
基于以上分析,上下直流母线电容电压差值DUC为
 (7)
(7)
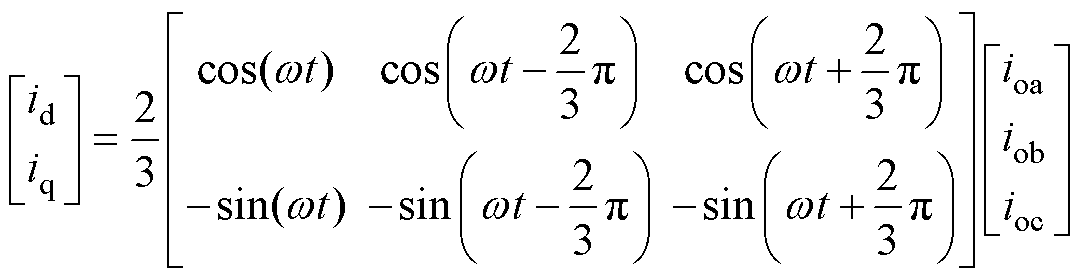
HCC理想状态下具有电容电压自平衡能力。然而,在实际应用中由于各相参数的差别、负载闭环参考电压畸变、以及工况突变等因素会使电容产生电压漂移现象,最终导致系统失衡。此外,HCC系统在低频下由于充放电时间延长存在剧烈的电容电压波动问题。根据HCC拓扑结构及式(7)可知,当U2平衡后,U1和U3取决于中性点总电流。采用dq旋转坐标系下的电流矢量控制后的dq轴电流表达式为
 (8)
(8)
式中,id与iq为d、q旋转坐标系下的正交电流,一般转子磁链由d轴电流id控制,电机转矩由q轴电流iq控制;w为角频率, ,fac为系统输出频率。将给定电流参考值与采样值之间的差值输入到PI调节器,PI调节器最小化误差后生成d、q轴电压Ud与Uq,再通过反变换生成三相参考波。结合式(6)~式(8)分析可知,当系统负载以及电流幅值确定后,电容电压波动主要与输出频率有关。
,fac为系统输出频率。将给定电流参考值与采样值之间的差值输入到PI调节器,PI调节器最小化误差后生成d、q轴电压Ud与Uq,再通过反变换生成三相参考波。结合式(6)~式(8)分析可知,当系统负载以及电流幅值确定后,电容电压波动主要与输出频率有关。
已有研究发现,中性点总电流频率与输出电流频率存在三倍关系[9, 22],当系统输出频率变小时,中性点电流频率随之降低,导致直流母线电容充放电周期变长。共模电压的注入不会影响负载侧的输出且可以调节中性点电流,因此本文通过注入共模电压修改参考波,从而实现电容电压平衡。忽略载波频率影响的情况下,DUC为一个频率是输出频率三倍的周期波,而三倍频共模电压注入可以抑制电容电压波动,因此可以考虑将电容电压差值生成的三倍频正弦波作为共模电压以调整中性点电流。注入的共模电压uDcom表示为
 (9)
(9)
式中,kp为共模电压调节系数;kp及DUC主要用于确定注入共模电压的瞬时值。该控制方法可以通过PI调节器实现,其输入为U1与U3的差值,输出为共模电压uDcom,注入共模电压后参考波表达式为
 (10)
(10)
依据第1节分析,此时开关信号函数变为
 (11)
(11)
中性点总电流表达式为
 (12)
(12)
所注入的共模电压使得中性点总电流在一个载波周期内对电容进行一次完整的充放电过程,加快了电容充放电频率,且在一个基波周期内中性点电流平均值更接近于0,进而实现电容电压的平衡控制。
根据式(6)~式(8)分析,低频输出工况下因电容充放电变慢导致电容电压交流分量剧烈波动,在高频输出时因充放电周期变短,该波动会自动降低,主要存在直流分量偏差。因此在高频工况下,uDcom的作用是实现电容电压直流偏差的修正。合理的三倍频共模电压的注入具有提高直流母线电压利用率的效果,但电流闭环控制的加入以及系统功率因数的变化使得生成的三倍频共模电压与参考波存在角度偏差并发生畸变,导致难以兼顾实现电容电压平衡和电压母线利用率提升。因此,本文进一步提出了高频高调制比下共模电压角度补偿和电容电压主动平衡的控制策略。
结合d、q轴电压Ud与Uq对三相电压公式进行推导,定义电压调制比为ma,其表达式为
 (13)
(13)
以A相为例,经过Clarke和Park反变换后A相电压表达式为
 (14)
(14)
式中, 为参考电压相位。将式(14)进行归一化并结合式(13),最终生成的A相参考波urefa表达式为
为参考电压相位。将式(14)进行归一化并结合式(13),最终生成的A相参考波urefa表达式为
 (15)
(15)
此时应注入三倍频共模电压u3com,其表达式为
 (16)
(16)
式中,Acom为共模电压注入幅值;qcom为共模电压需要进行补偿的角度。电机四象限运行过程中加减速工况的不同使其所需的d、q轴电压不断发生变化,因此针对Ud和Uq进行详细讨论。
(1)工况1:Ud>0且Uq>0,此时电机为正向减速工况,式(15)中参考电压相位f为
 (17)
(17)
结合式(15)和式(16),为了保证生成的共模电压相位与参考波相位时刻保持3倍关系不发生偏差,需要满足
 (18)
(18)
最终,式(16)中共模电压补偿角度qcom为
 (19)
(19)
(2)工况2:Ud<0且Uq>0,此时为正向加速工况,同理可得,参考波相位及共模电压补偿角度分别为
 (20)
(20)
(3)工况3:Ud>0且Uq<0,此时为反向减速工况,参考波相位及共模电压补偿角度分别为
 (21)
(21)
(4)工况4:Ud<0且Uq<0,此时为反向加速工况,此种工况参考波相位及共模电压补偿角度与工况3相同。
(5)工况5:Ud=0或Uq=0,此时为空载匀速运行或转速为零,不需要进行共模电压角度补偿,即
 (22)
(22)
图2展示了电压角度补偿前后三倍频共模电压的波形与叠加共模电压前后参考波波形。图2中,上面的图包括角度补偿前后的三倍频共模电压u3com和未归一化的参考电压,下面的图对比了叠加补偿前和补偿后共模电压的参考电压波形。从图中可以看出,未进行角度补偿的三倍频共模电压与输出参考电压波形存在相位偏差,导致最终合成的参考波不是马鞍波,因此直流母线电压利用率会降低。加入共模电压角度补偿策略后,最终叠加的输出电压参考波具有马鞍波效应,实现了提高直流母线电压利用率的目的。
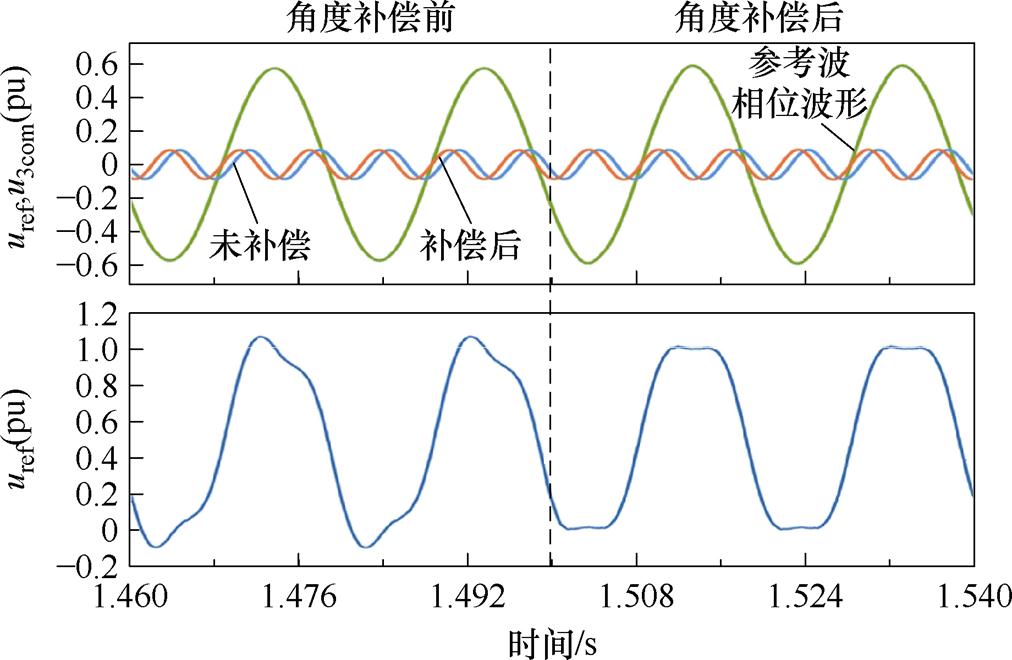
图2 角度补偿前后参考波波形
Fig.2 Reference waveforms before and after adding angle compensation
为了保证不出现超调现象,三倍频共模电压注入的幅值要满足
 (23)
(23)
根据式(23)以及PS-PWM原理,通过计算得到最大调制比为 ,此时注入共模电压幅值为参考波幅值的1/6,即式(16)中Acom=1/6。同时为了平衡电容电压,仍需注入一个微量的uDcom。
,此时注入共模电压幅值为参考波幅值的1/6,即式(16)中Acom=1/6。同时为了平衡电容电压,仍需注入一个微量的uDcom。
基于闭环策略的共模电压注入流程框图如图3所示。定义l为高频率边界值,k为高调制参数。首先获取系统直流母线电压Udc、系统频率fac、dq轴参考电流幅值idref与iqref,采用dq旋转坐标系下的电流矢量控制得到dq轴电压Ud与Uq,根据系统工况设定合适的l与k。
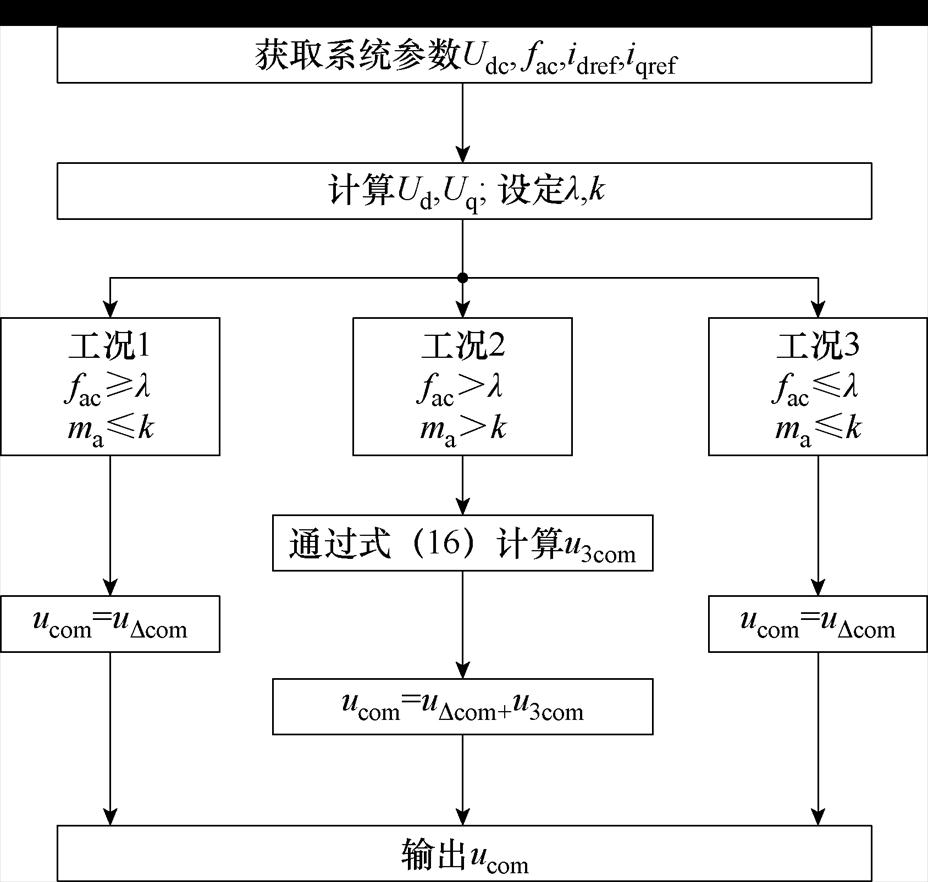
图3 不同工况下共模电压注入选择框图
Fig.3 Block diagram of common mode voltage injection selection for different operating conditions
由于在电机运行过程中过调制一般出现在高速满转矩的工况下,因此选择在频率较高且系统处于高调制比下采用此种注入方式。与此同时,针对电机运行工况,在低频低速下,即使满负载转矩起动也不存在高调制的工况,因此此种工况不在考虑范围。基于此可将系统分为三种工况:
(1)工况1:fac≥l且ma≤k,此时系统处于高频低调制比工况,不需要注入角度补偿的共模电压,注入的共模电压为uDcom。
(2)工况2:fac>l且ma>k,此时系统处于高频高调制比工况,为防止系统超调需要注入角度补偿后的三倍频共模电压,即注入的共模电压为uDcom与u3com的总和。
(3)工况3:fac≤l且ma≤k,此时系统处于低频低调制比状态,注入共模电压与工况1相同。
变频电机频率范围一般为0~200 Hz,当电机转速接近额定转速且负载转矩较大时系统才会处于高调制状态,为了验证方法的普遍适用性,本文选取l=50。
结合电压调制比表达式(13),根据经验,一般取ma>0.8时认为系统处于高调制状态,即本文中k=0.8。最终注入的共模电压表达式为
 (24)
(24)
式中,e(fac-l)与e(ma-k)为关于频率与调制比的阶跃函数,当fac>l和ma>k时,e(fac-l)与e(ma-k)取值为1;否则,取值为0。
针对U2与Ufx的平衡控制,其本质是通过调节开关的占空比进而调节电容的充放电,同时不影响负载侧的输出。本文借鉴文献[14]通过增加PI调节器产生一个微小分量来调节开关占空比,进而实现U2与Ufx平衡的控制方法。考虑本文所提的闭环共模电压分量,最终生成的每相开关S1x、S2x、S3x参考电压表达式分别为
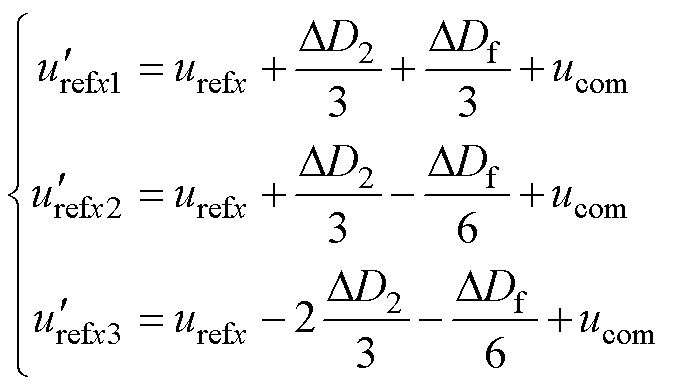 (25)
(25)
式中,DD2与DDf分别为U2与Ufx产生的用于调节电容电压平衡的微小变量。
图4显示了基于所提闭环共模电压注入的HCC整体系统控制框图。获取系统输出频率与dq轴参考电流幅值后,对U1与U3进行电压采样并得到差值DUC,进一步根据式(9)计算得到uDcom;采样三相电流进行坐标变换并与参考值比较,将误差输入到PI调节器获得不同工况下的dq轴电压Ud与Uq;根据式(13)、式(16)~式(22)分别计算ma和u3com;根据设定条件l与k判断注入角度补偿三倍频共模电压的时刻,最终生成平衡U1与U3的ucom。将ucom、输出电流矢量闭环控制生成的三相输出参考电压以及U2和Ufx的平衡控制分量DD2与DDf相结合,然后根据式(25)生成最终的HCC控制电压参考波信号,最后与载波进行对比产生所有开关调制信号。通过该方法能实现输出电流闭环下宽频域电容电压波动抑制和平衡,也能在高频高调制比下实现母线电压利用率的提升。
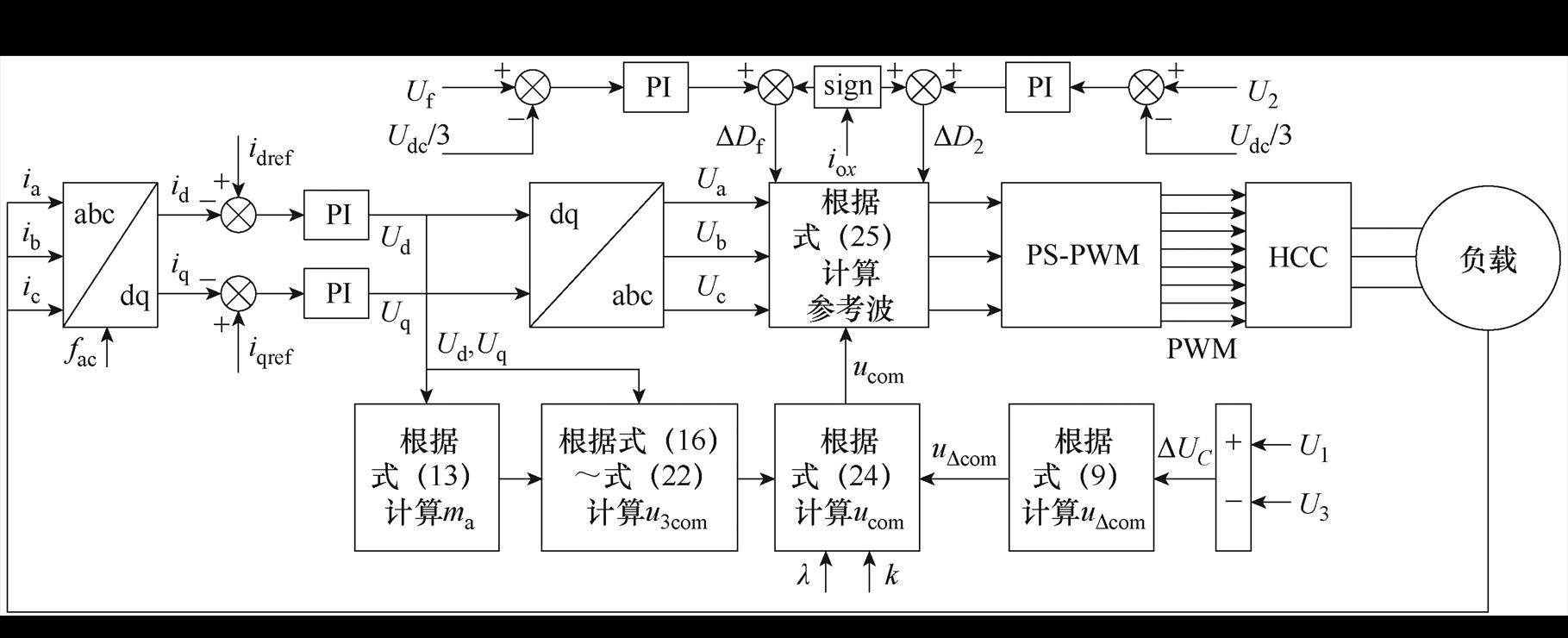
图4 HCC系统整体控制框图
Fig.4 Overall control block diagram of HCC system
为了验证所提控制方法的准确性,本文在Matlab/ Simulink仿真平台中搭建了3.6 kV/500 kV·A HCC控制系统仿真模型,其中直流母线电压为3 600 V,仿真与实验电容容值均为0.18 mF,各电容额定电压为1 200 V,系统开关频率为6 kHz,具体的仿真模型和实验平台参数见表1。
表1 HCC系统仿真模型和实验平台参数
Tab.1 Parameter of the simulation model and test platform for HCC system
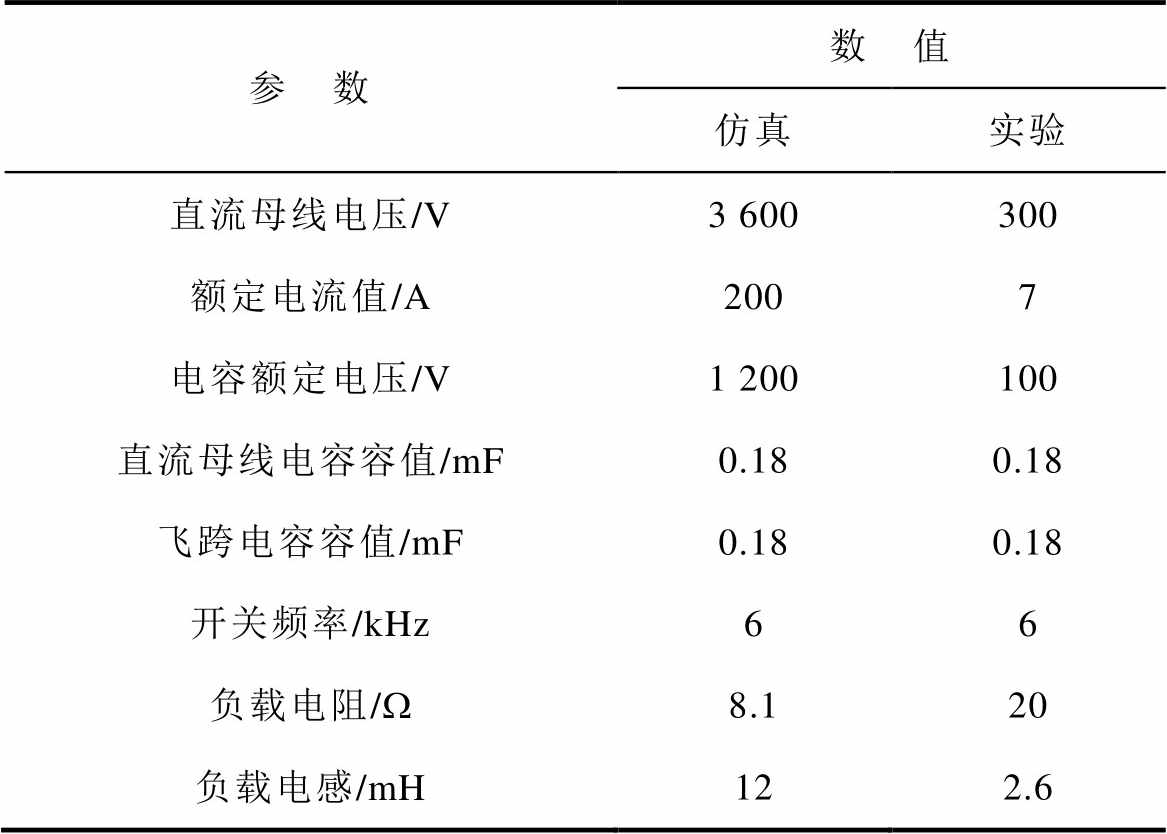
参 数数 值 仿真实验 直流母线电压/V3 600300 额定电流值/A2007 电容额定电压/V1 200100 直流母线电容容值/mF0.180.18 飞跨电容容值/mF0.180.18 开关频率/kHz66 负载电阻/W8.120 负载电感/mH122.6
本文首先开展了输出电流开环工况下的不同控制方法对比。所对比的方法包括文献[23]中所提开环共模电压注入方法,未加共模电压注入的传统PS-PWM控制方法。本文考虑实际电机驱动系统运行工况,选择功率因数为0.9时进行对比分析。Ufa为A相飞跨电容电压,Uab为A相与B相输出线电压。
图5显示了三种不同控制方法在极低频率(2 Hz)下系统运行的仿真结果。在1 s之前采用所提控制方法,1~2 s采用开环共模电压注入方法,2~3 s采用传统PS-PWM控制方法。从图5中可以看出,输出电流开环状态下,由于载波频率较高,中直流母线电容与飞跨电容波动较小,约为2%。对于U1与U3来说,在开环共模电压注入方法下,电容电压峰峰值达到840 V,为额定工作值的35%,相比于传统PS-PWM控制方法减小了65%的电容电压波动。所提控制方法在电容电压波动抑制上具有更加优异的效果,其峰峰值为64 V,仅为额定工作值的2.6%,相比于开环共模方法进一步减小了30%的电容电压波动,各电容电压均稳定在额定工作值附近,电流谐波性能更好,THD低于0.5%。
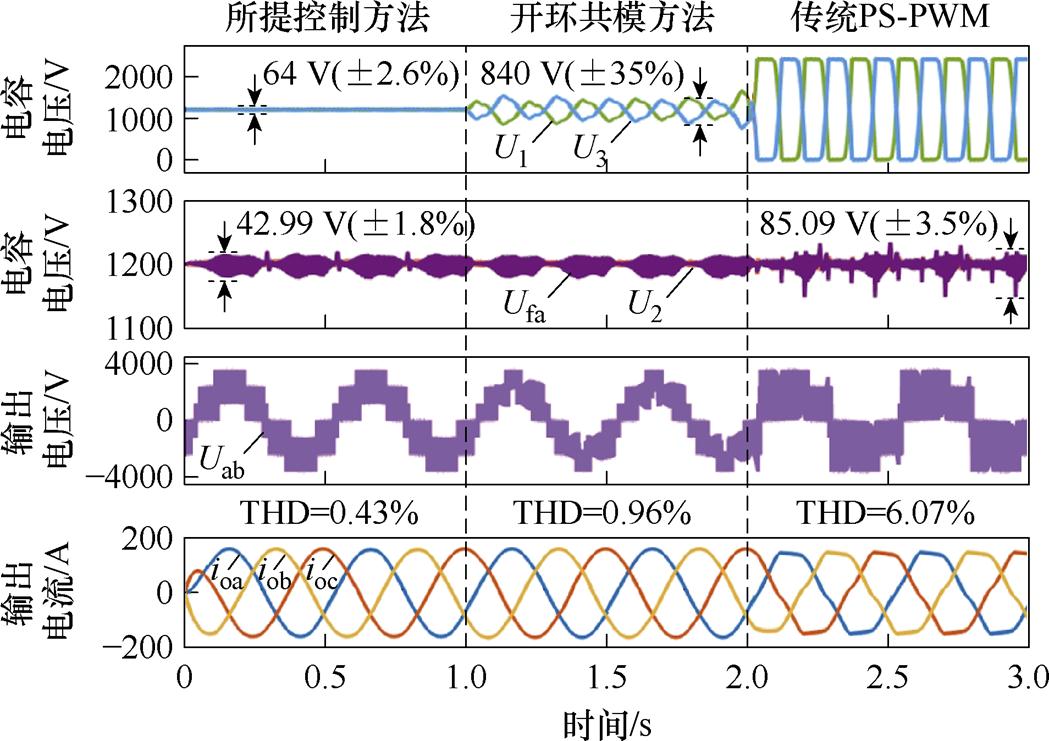
图5 fac=2 Hz,输出电流开环不同控制方法对比
Fig.5 Comparison of different control methods for output current open-loop at fac is 2 Hz
为了验证所提控制方法在宽频域的有效性,图6展示了极低频率到高频(2~200 Hz)不同频率下三种控制方法的电容电压波动仿真结果,每个频率从左至右分别为PS-PWM控制、开环共模方法和所提控制方法。从图6中可知,开环共模电压注入方法可以抑制U1与U3波动,但抑制效果有限,在极低频率下电容电压波动仍然很大,最大可达35%。所提控制方法在各频率下均具有稳定优异的抑制效果,波动值不超过3%。因此在宽频工作范围内所提控制方法均有良好的电容电压抑制效果,且相比于开环共模电压注入具有更强的抑制效果。
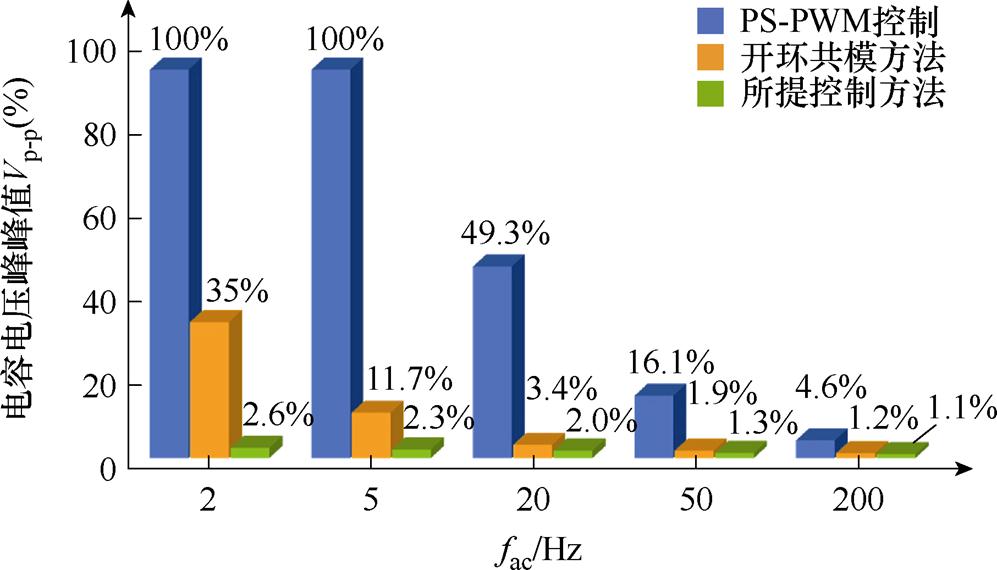
图6 不同控制方法在宽频下电容电压波动仿真结果
Fig.6 Simulation results of capacitor voltage fluctuation under wide frequency with different control methods
由于输出负载电流采用矢量控制等闭环控制方法会对参考电压引入高频谐波畸变,增强系统电容电压平衡的不稳定性。本文重点检验了所提方法在输出电流闭环下低频(2 Hz),直流输出(0 Hz)以及动态负载变化工况下的系统响应特性。
图7展示了所提控制方法与其他两种控制方法在2 Hz的运行仿真结果。在1.5 s前采用所提出控制方法,1.5~2.5 s切换为开环共模电压注入方法,2.5 s以后切换为PS-PWM控制方法。在PS-PWM控制方法下,U1与U3波动达到100%,输出电压与电流发生严重畸变。当加入输出电流闭环控制后,开环共模方法无法实时确定共模电压注入量,注入的共模电压量有些许偏差,虽然相比于PS-PWM控制方法,电容电压波动有所减小,但其波动幅值仍达到了额定工作值的54.4%,比输出电流开环工况下更大。所提控制方法将U1与U3波动峰峰值抑制到55 V,为额定值的2.3%,减小了50%的电容电压波动,具有优异稳定的输出性能和低谐波特性。
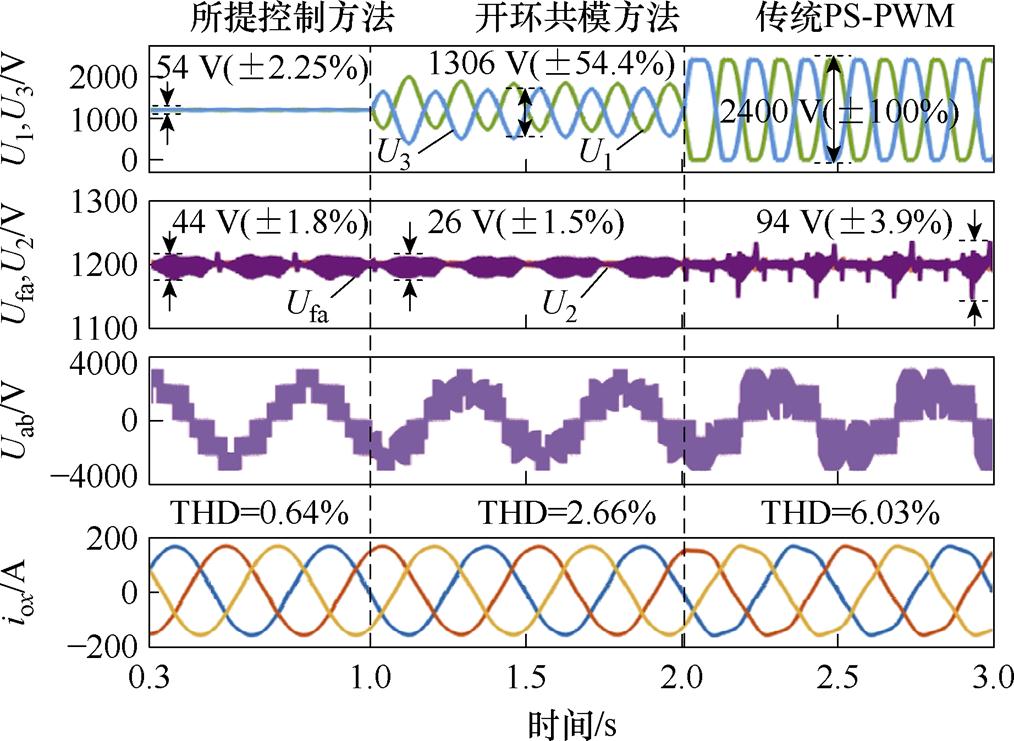
图7 输出电流闭环在fac=2 Hz的三种控制方法仿真结果
Fig.7 Simulation results of three control methods with output current closed-loop at fac=2 Hz
由于所提控制方法主要针对于中高压变频驱动系统,需要考虑电机静止工况下(0 Hz)大电流的输出保持能力。图8给出了所提控制方法在0 Hz工况下的仿真结果。从图8中可以清晰看到,加入电流闭环后,在所提控制方法下能持续输出±200 A的直流电流并保持稳定,各电容电压未产生剧烈波动和偏移。因此,图8充分验证了所提控制方法在极端工况0 Hz时也具有良好的电流输出和电容电压平衡能力。
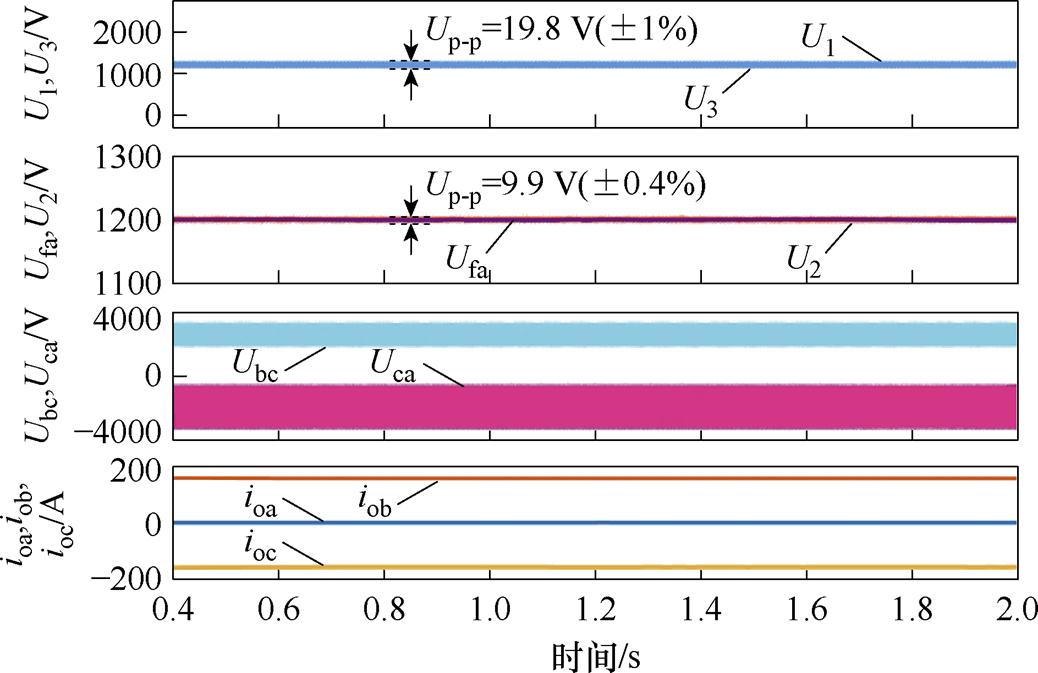
图8 fac=0 Hz所提控制方法仿真结果
Fig.8 Simulation results with the proposed control method at fac is 0 Hz
为了对所提控制方法的动态性能进行研究,图9为工频50 Hz时不同控制方法下系统动态响应结果对比。初始电流为30 A(15%额定电流),在1 s时突变为100 A(50%额定电流),在2 s时变为160 A(80%额定电流)。在传统PS-PWM控制方法下,当电流从100 A变为160 A时,上下直流母线电容电压波动增加明显,并随着时间推移偏离了额定工作值。开环共模控制方法下,参考电流幅值为100 A时电容电压发生一定偏差,电流增加至160 A后,随着共模电压注入幅值的增加电压偏移量逐渐缩小,随后在额定电压值附近波动,波动幅值为8.4%。所提控制方法相比于开环共模方法,当电流幅值为160 A时波动减小了6%,同时电容电压未发生偏移现象。从仿真结果可以看出,传统PS-PWM控制方法在加入电流闭环控制后,电容电压的平衡会受到电流阶跃变化的影响,可能会造成系统的不稳定。开环共模方法相比于传统控制方法能实现电容电压稳定,但是波动量较大。本文所提控制方法相比于开环共模电压方法能进一步减小电容电压的波动,具有良好的动态平衡稳定性。
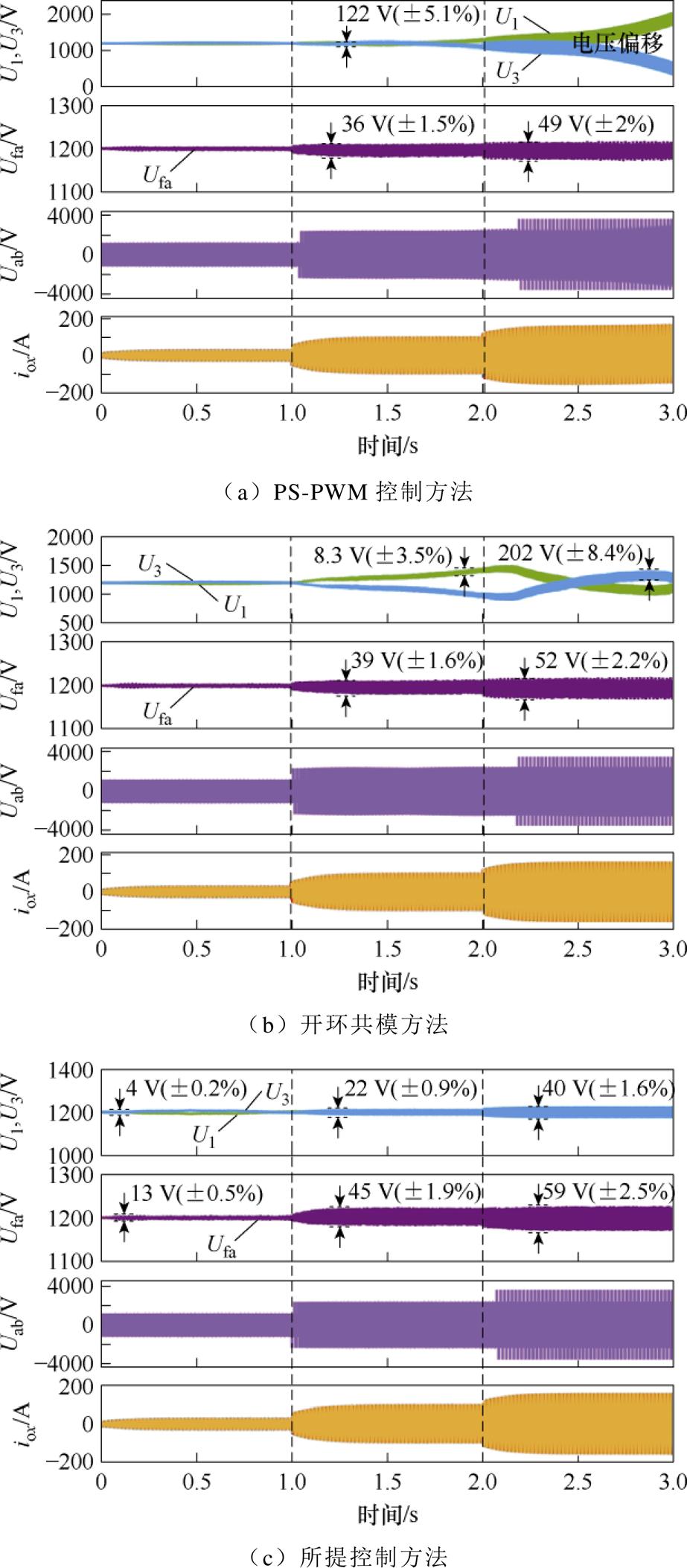
图9 fac=50 Hz,不同控制方法动态响应对比
Fig.9 Dynamic response comparison for different control methods at fac is 50 Hz
此外,本文还计算了工频(50 Hz)下不同控制方法下低调制和高调制两种工况的功率损耗。计算方法主要参考文献[25-26],开关器件采用罗姆公司1.7 kV/250 A全SiC半桥模块。HCC系统主要损耗由开关器件产生,电容和回路母排产生的损耗可以忽略不计,因此本文主要计算了功率器件的损耗,具体结果见表2。从表2可以看出,同样工况下三种控制方法系统总损耗没有显著差异,这是由于所提控制方法本质上并不会改变器件开关频率,同时对器件流过电流也影响较小。因此,所提控制方法下系统开关损耗没有明显增加,不会增加系统的总损耗。
已经对所提控制方法在多频率工况下进行了验证,本节主要对所提的共模电压角度补偿策略进行验证。选择在调制比大于0.8时注入角度补偿后的三倍频共模电压。
表2 不同控制方法的损耗对比
Tab.2 Comparison of the power loss under different control methods
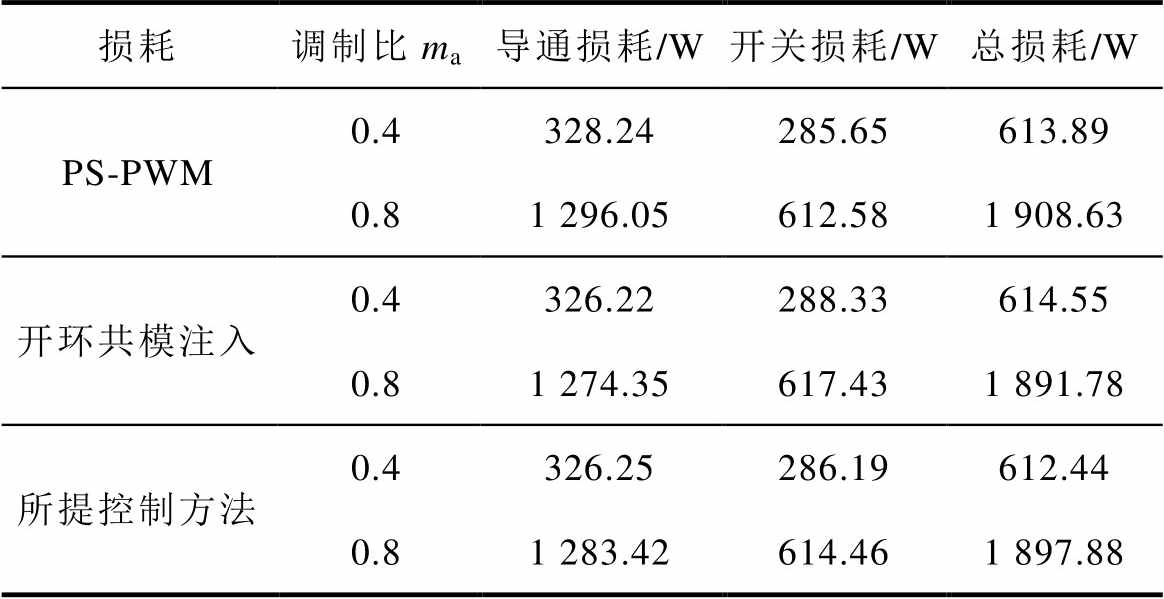
损耗调制比ma导通损耗/W开关损耗/W总损耗/W PS-PWM0.4328.24285.65613.89 0.81296.05612.581908.63 开环共模注入0.4326.22288.33614.55 0.81274.35617.431891.78 所提控制方法0.4326.25286.19612.44 0.81283.42614.461897.88
图10展示了高频调制比达到最大值时,共模电压角度补偿前后系统运行结果,测试频率为200 Hz。从图10中可以看出,未进行共模电压角度补偿时,由于相位存在偏差,注入的共模电压与参考波叠加后并未形成“马鞍波”效应,满调制状态下系统输出电流幅值为190 A,降低了5%的直流母线电压利用率。这是由于叠加后参考波发生畸变且输出电流PI调节以及其他电容调节分量引入导致母线电压利用率难以达到100%。在进行共模电压角度补偿后,满调制状态下输出最大电流幅值可达228 A,为系统额定电流的114%。各电容电压波动最大在5%左右,且系统未出现超调现象。因此,图10验证了所提控制方法在高频工况下实现系统稳定工作的同时直流母线电压利用率提高了14%。
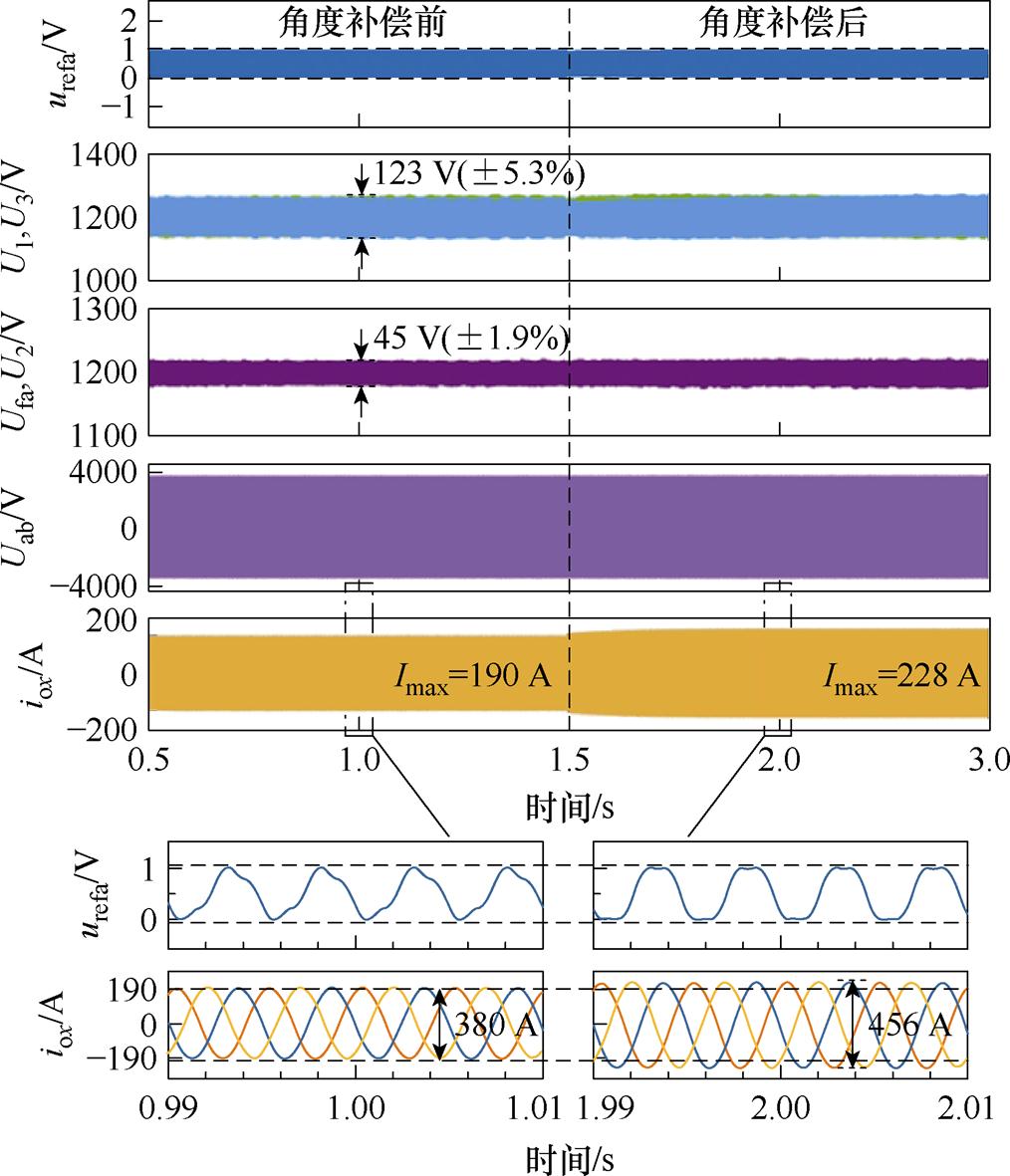
图10 fac=200 Hz共模电压角度补偿前后仿真结果
Fig.10 Simulation results of before and after adding common mode voltage angle compensation at fac is 200 Hz
为了进一步研究所提控制方法在电驱系统应用中的有效性,在仿真中进行了在所提控制方法下电机四象限运行时的全速性能验证,如图11所示。图中上半部分为电机四象限运行时系统各电容电压、输出电流、电机转速、转矩以及dq坐标系下的参考电流与反馈电流仿真结果。下半部分重点展示了正向和反向加速和减速过程中标幺化后的参考波uref、角度补偿后共模电压u3com和最终叠加生成的参考波uadd波形。A、B、C、D 4个时刻分别对应高调制工况时电机正向加速、正向减速、反向加速和反向减速四个阶段。从图11中可以看出,电机运行速度范围为-1 800~1 800 r/min,dq轴反馈电流可以很好地跟踪电流参考值,电机转矩波动较小。同时,在该控制方法下,电容电压没有发生严重的偏移现象,波动幅值小于10%。此外,多种工况下高频高调制比时,角度补偿后的三倍频共模电压与参考波相位没有明显偏差,最终所形成的参考波波形均为马鞍波。因此,通过电机的四象限运行结果,有效地验证了所提控制方法在全速范围内,具有良好的电压电流和转矩、速度控制准确度与稳定性以及角度补偿策略的准确性。
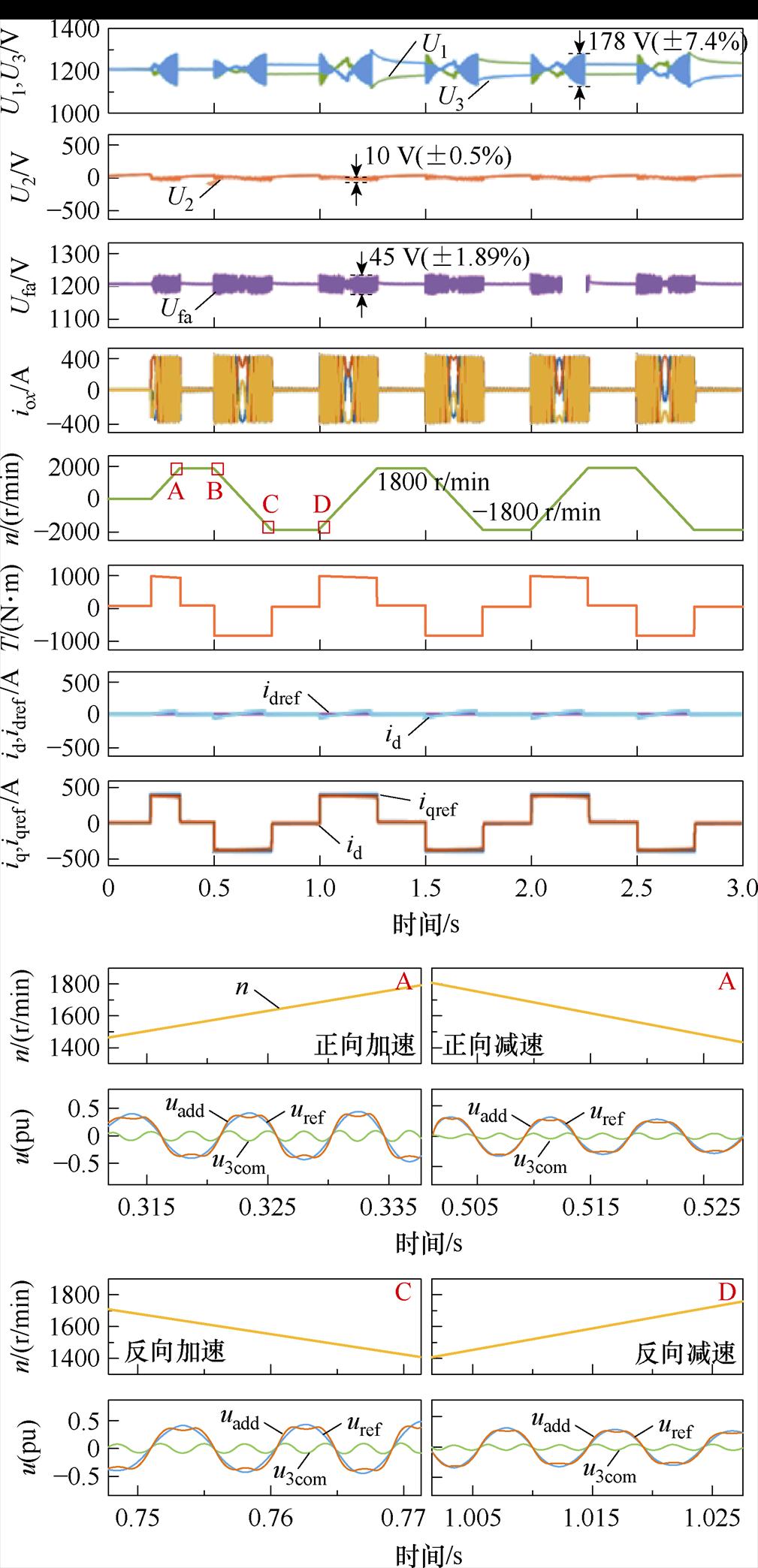
图11 HCC电驱系统四象限运行结果
Fig.11 Four-quadrant operation of the HCC drive system
为了验证所提出控制方法的有效性,本文搭建了如图12所示的三相HCC实验平台,实验平台主要由直流电源、三相HCC主电路、数字信号处理器(Digital Signal Processing, DSP)、现场可编程门阵列(Field Programmable Gate Array, FPGA)、光纤板和驱动电源等组成。本文采用上位机进行系统控制,由DSP与FPGA相结合的方式实现所提控制算法,其生成驱动信号后传递给光纤板,光纤板接收驱动信号再通过光纤线传输给各功率器件,保证了信号的稳定传输。实验时,直流母线电压为300 V,各电容额定电压为100 V,具体实验参数见表1。
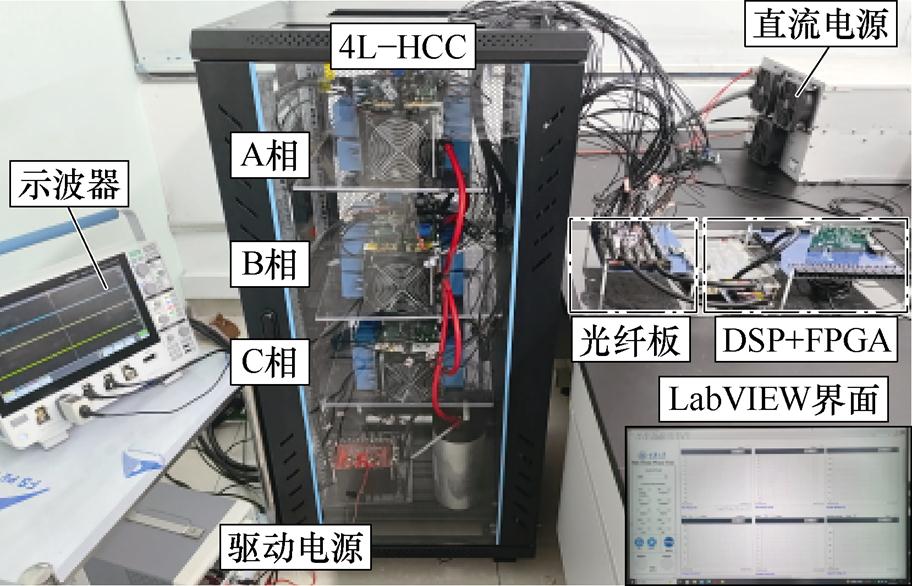
图12 三相HCC实验平台
Fig.12 Experimental platform of three-phase HCC
本文首先在输出电流开环工况下进行测试。图中,U2、U3、Uab、Ioa分别为中直流母线电容电压、下直流母线电容电压、输出A相与B相线电压和A相输出电流。图13展示了2 Hz工况下,所提控制方法与开环共模方法的实验对比结果,首先采用本文所提的控制方法,随后切换到开环共模电压注入方法。采用所提控制方法与开环共模方法,中、下直流母线电容均稳定工作在100 V附近,但开环共模方法电容电压波动达到40 V,为额定工作值的20%。所提控制方法电容电压波动为6%,相比于开环共模方法减小了14%的电容电压波动与2.69%的电流THD,提高了系统输出性能。
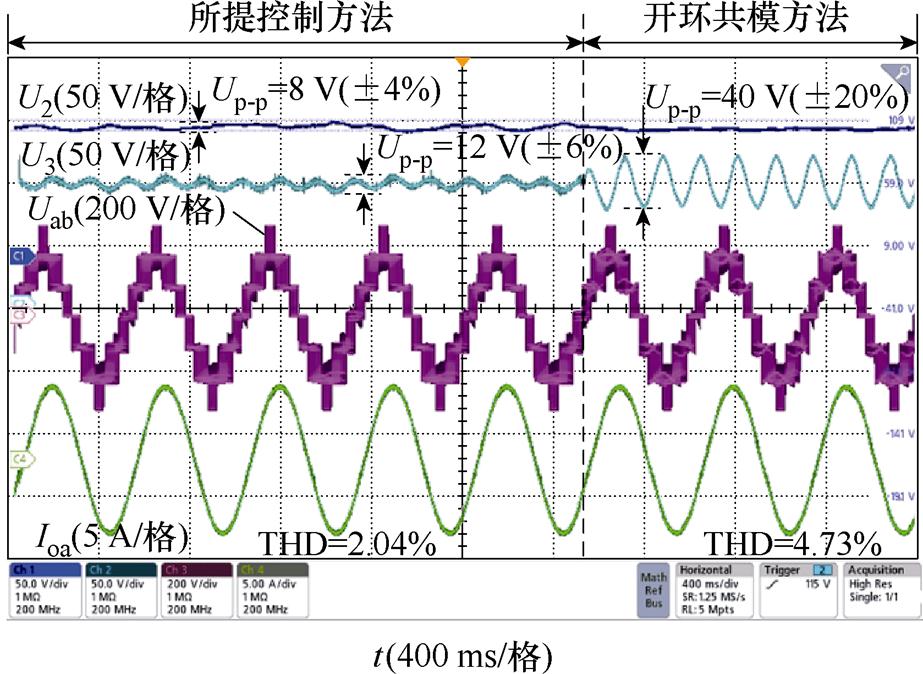
图13 fac=2 Hz输出电流开环所提控制方法与开环共模方法结果对比
Fig.13 Comparison of results of the proposed method and the open-loop common-mode method at f is 2 Hz with open-loop output current control
图14为输出电流闭环工况下,所提控制方法与开环共模方法实验对比。参考电流为7 A,首先采用本文所提的控制方法,随后切换到开环共模方法。采用本文所提出控制方法时,下直流母线电容电压稳定工作在额定电压,波动幅值为12.3 V(额定电压的±6.15%),同时具有较低的谐波分量2.42%。切换为开环共模电压注入后,电容电压波动幅值增加了11.09%,达到额定值的17.24%。实验结果表明所提控制方法在输出负载电流闭环的工况下具有更高的电容电压波动抑制效果。
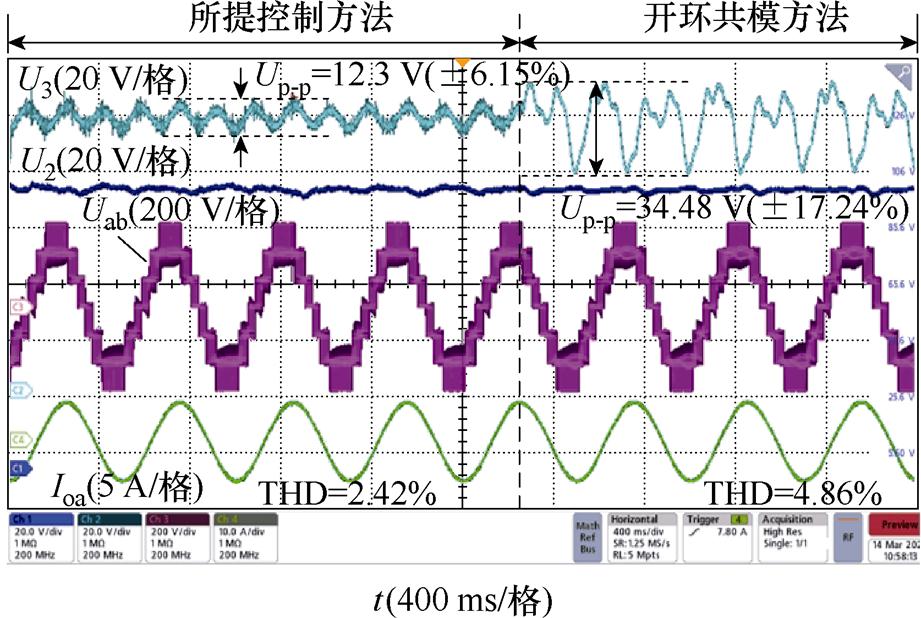
图14 fac=2 Hz输出电流闭环所提控制方法与开环共模方法结果对比
Fig.14 Comparison of results of the proposed method and the close-loop common-mode method at f is 2 Hz with open-loop output current control
图15显示了极限工况0 Hz时的测试结果,采用所提控制方法可以产生稳定的直流输出电压与电流。中直流母线电容与下直流母线电容均以小于6%的电容电压波动并稳定工作在100 V。结合图13~图15,验证了所提控制方法可以实现HCC系统低频工况的稳定运行,同时具有极端工况0 Hz的稳定输出能力。
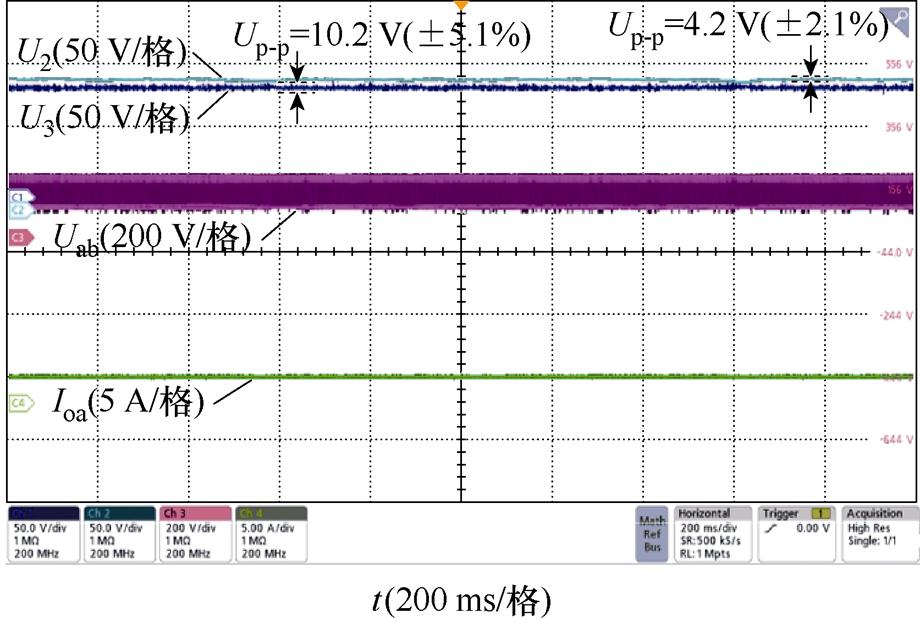
图15 fac=0 Hz所提控制方法测试结果
Fig.15 Experimental results at 0 Hz with the proposed method
为了验证所提控制方法的动态性能与宽输出频率有效性,图16展示了在50 Hz工况下的暂态实验结果。其中,图16中施加50%负载电流阶跃变化,起始电流参考值为3 A,最终电流参考值为6 A。突加负载电流前,中直流母线电容与下直流母线电容电压波动分别为2%(4 V)与4%(8 V),突加负载电流后中直流母线电容与下直流母线电容波动分别为3%(6 V)与7%(14 V)。负载电流变化前后各电容电压波动均小于10%且HCC可以从一个稳态过渡到另一个稳态,电流THD分别为3.11%与2.28%,未发生电流畸变现象。图16验证了所提控制方法具有良好的动态性能。
图17显示了系统在高频200 Hz运行时的实验结果,其参考电流为6 A。U2与U3波动峰峰值分别为2 V(±1%)与8.4 V(±4.2%)。实验结果表明,所提控制方法在高频输出电流闭环工况下具有优秀的电容电压平衡能力。
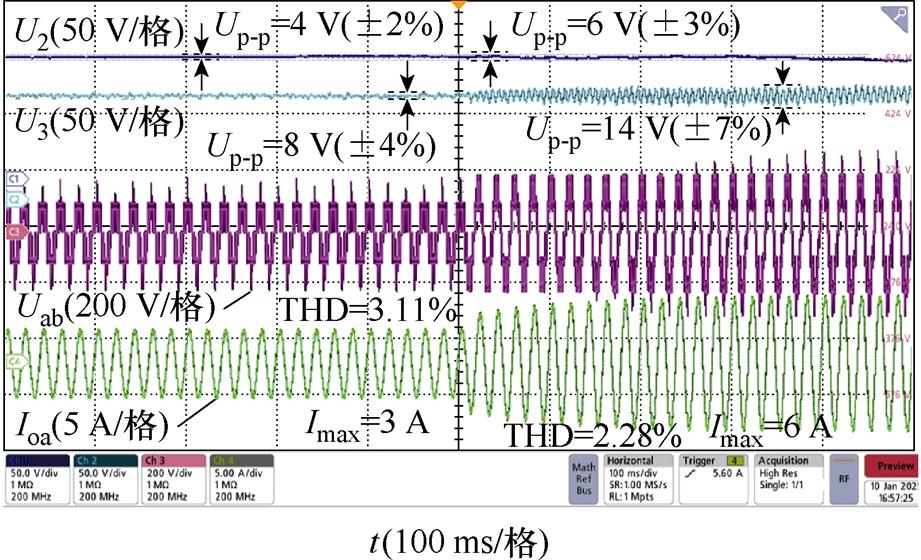
图16 fac=50 Hz电流阶跃变化50%实验结果
Fig.16 Experimental results of current step change 50% at fac is 50 Hz
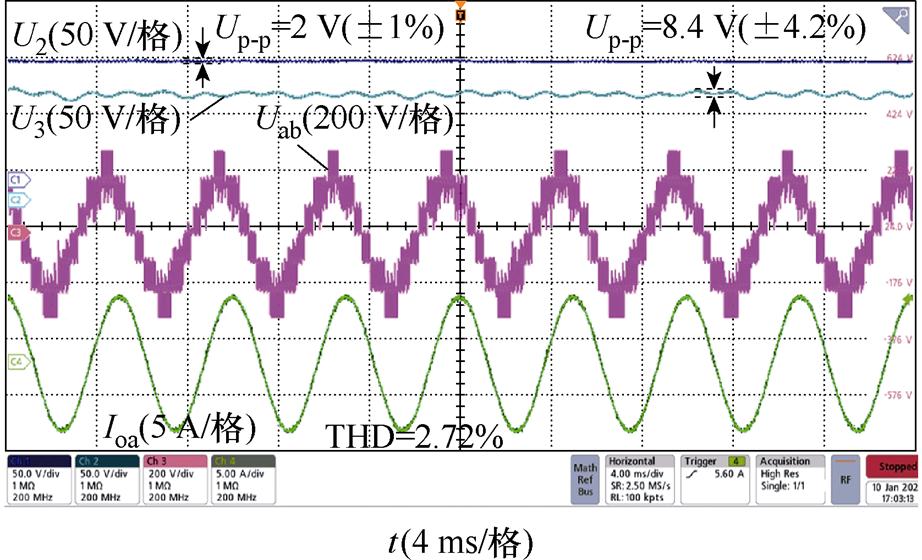
图17 fac=200 Hz所提控制方法测试结果
Fig.17 Experimental results of the proposed control method atfac is 200 Hz
图18检验了高频高调制比下角度补偿策略的有效性。在200 Hz高频高调制比输出时,未加入共模电压角度补偿的系统额定满电压下输出电流为7 A。加入共模电压角度补偿后HCC实验结果和相参考电压波形如图18所示。此时在角度补偿和闭环共模电压注入后,A相参考电压呈现“马鞍波”效应,与图10中仿真结果非常吻合,削减了最大电压峰值从而提高了电压利用率。系统输出电流幅值达到8 A,高于系统额定电流的14%。因此,图18验证了三倍频共模电压角度补偿策略及其电压利用率提升作用的有效性。
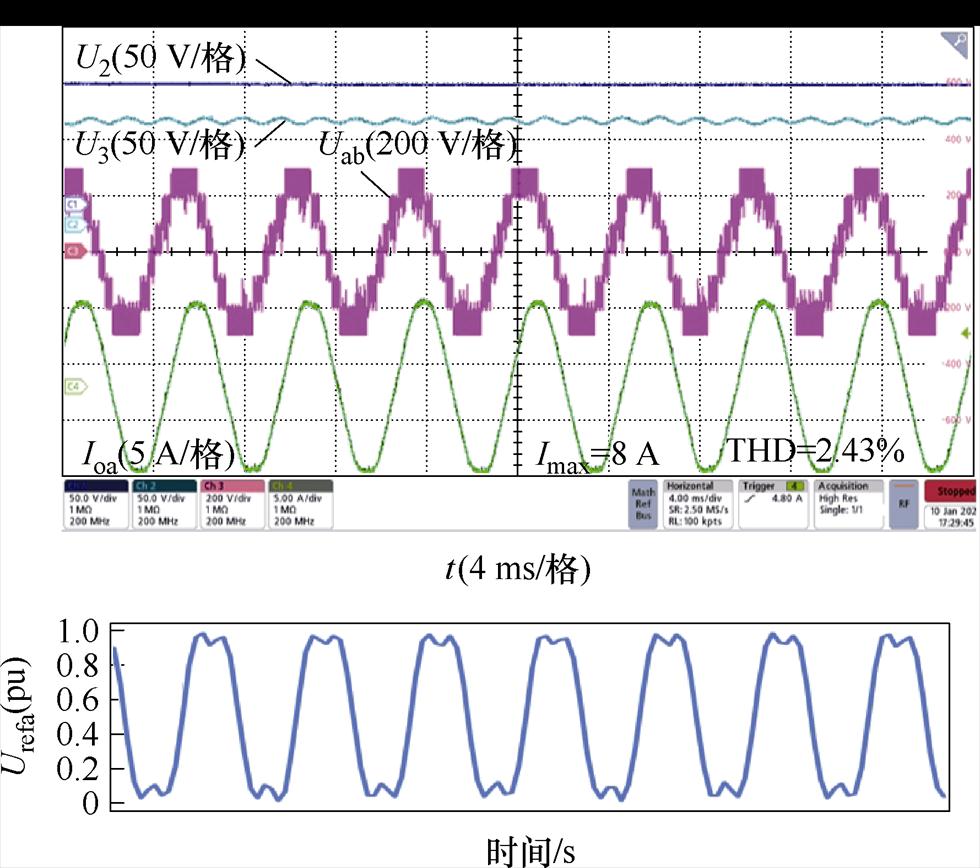
图18 fac=200 Hz加入角度补偿策略实验结果
Fig.18 Experimental results of adding angle compensation strategy at 200 Hz
本文提出一种基于电容电压差值提取的闭环共模电压注入方法,并提出了三倍频共模电压角度补偿策略。通过仿真结果与实验测试,验证了在所提控制方法下具有以下显著特征:
1)所提控制方法对比现有方法具有更有效的低频电容波动抑制能力和工况适应性,特别是实现了直流0 Hz下大电流输出和电容电压稳定。
2)具有负载电流闭环调节和阶跃变化时良好的电容电压动态平衡能力。
3)在高频高调制比工况加入角度补偿后形成“马鞍波”效应,可将直流母线电压利用率和输出功率提升约14%。因此,本文所提控制方法能实现极低频率下电容波动的有效抑制和高频高调制比下母线电压利用率的提升,进而优化HCC宽频运行的输出性能和可靠性。
参考文献
[1] 杨亚宇, 邰能灵, 黄文焘, 等. 船舶中压直流综合电力系统(一): 系统结构和电力电子变换器[J]. 电工技术学报, 2024, 39(21): 6647-6665.
Yang Yayu, Tai Nengling, Huang Wentao, et al. Shipboard medium-voltage DC integrated power system Ⅰ: system architecture and power electronic converter[J]. Transactions of China Electrotechnical Society, 2024, 39(21): 6647-6665.
[2] 贾冠龙, 史斌昊, 李明硕, 等. 基于器件复用的有源功率解耦型模块化多电平变换器拓扑研究[J]. 中国电机工程学报, 2025, 45(7): 2755-2768.
Jia Guanlong, Shi Binhao, Li Mingshuo, et al. Active power decoupling for full-bridge submodules of a modular multilevel converter[J]. Proceedings of the CSEE, 2025, 45(7): 2755-2768.
[3] 岳舟, 李波, 刘涛, 等. 基于开关电容单元的多电平逆变器研究[J]. 电气工程学报, 2024, 19(4): 194- 203.
Yue Zhou, Li Bo, Liu Tao, et al. Research on multilevel inverter based on switched-capacitor cell[J]. Journal of Electrical Engineering, 2024, 19(4): 194-203.
[4] Leon J I, Vazquez S, Franquelo L G. Multilevel converters: control and modulation techniques for their operation and industrial applications[J]. Pro- ceedings of the IEEE, 2017, 105(11): 2066-2081.
[5] Le Q A, Lee D C. A novel six-level inverter topology for medium-voltage applications[J]. IEEE Transa- ctions on Industrial Electronics, 2016, 63(11): 7195- 7203.
[6] 高仕龙, 陈武, 杨勇, 等. 海上风电柔性低频输电换流器控制策略及试验[J]. 电工技术学报, 2024, 36(增刊1): 77-94.
Gao Shilong, Chen Wu, Yang Yong, et al. Control strategy and test of offshore wind flexible low frequency transmission converter[J]. Transactions of China Electrotechnical Society, 2024, 36(S1): 77-94.
[7] 侯玉超, 郭祺, 涂春鸣, 等. 面向输出性能优化的高低频混合型模块化多电平变换器及其调控策略[J]. 电工技术学报, 2024, 39(14): 4467-4479.
Hou Yuchao, Guo Qi, Tu Chunming, et al. A high and low frequency hybrid modular multilevel converter for output performance optimization and its control strategy[J]. Transactions of China Electrotechnical Society, 2024, 39(14): 4467-4479.
[8] 任鹏, 涂春鸣, 侯玉超, 等. 基于Si和SiC器件的混合型级联多电平变换器及其调控优化方法[J]. 电工技术学报, 2023, 38(18): 5017-5028.
Ren Peng, Tu Chunming, Hou Yuchao, et al. Research on a hybrid cascaded multilevel converter based on Si and SiC device and its control optimization method[J]. Transactions of China Electrotechnical Society, 2023, 38(18): 5017-5028.
[9] Wang Kui, Zheng Zedong, Xu Lie, et al. A four-level hybrid-clamped converter with natural capacitor voltage balancing ability[J]. IEEE Transactions on Power Electronics, 2014, 29(3): 1152-1162.
[10] Chen Jianfei, Zhong Yulin, Wang Caisheng, et al. Four-level hybrid neutral point clamped converters[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(4): 4786-4801.
[11] Quan Zhongyi, Ge Lei, Wei Zhongbao, et al. A survey of powertrain technologies for energy-efficient heavy- duty machinery[J]. Proceedings of the IEEE, 2021, 109(3): 279-308.
[12] Javaid U, Freijedo F D, van der Merwe W, et al. Stability analysis of multi-port MVDC distribution networks for all-electric ships[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2020, 8(2): 1164-1177.
[13] Reusser C A, Young H A, Perez Osses J R, et al. Power electronics and drives: applications to modern ship propulsion systems[J]. IEEE Industrial Elec- tronics Magazine, 2020, 14(4): 106-122.
[14] Pan Jianyu, Yang Yong, Li Jian, et al. Control of high-performance drive feeding by four-level hybrid clamped converter for transportation electrification[J]. IEEE Transactions on Transportation Electrification, 2020, 6(2): 568-577.
[15] Dao N D, Lee D C. Operation and control scheme of a five-level hybrid inverter for medium-voltage motor drives[J]. IEEE Transactions on Power Electronics, 2018, 33(12): 10178-10187.
[16] Pan Jianyu, Na Risha, Yang Yong, et al. Capacitor voltage balancing and stabilization for 4-level hybrid-clamped converter using selected switching states[J]. IEEE Transactions on Power Electronics, 2019, 34(12): 12453-12463.
[17] Wu Mingzhe, Wang Kui, Yang Kehu, et al. Unified selective harmonic elimination control for four-level hybrid-clamped inverters[J]. IEEE Transactions on Power Electronics, 2020, 35(11): 11488-11501.
[18] Yang Yong, Pan Jianyu, Wen Huiqing, et al. Model predictive control with autotuning weighting factors for single-phase six-level hybrid-clamped conver- ters[J]. IEEE Transactions on Industrial Electronics, 2021, 68(9): 7946-7956.
[19] Yang Yong, Pan Jianyu, Wen Huiqing, et al. Model predictive current control with low complexity for single-phase four-level hybrid-clamped converters[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 983-999.
[20] Wu Mingzhe, Tian Hao, Li Yun wei, et al. Hybrid voltage balancing control for four-level hybrid- clamped converters with low switching frequency[J]. IEEE Transactions on Industrial Electronics, 2022, 69(11): 11165-11176.
[21] Wang Kui, Xu Lie, Zheng Zedong, et al. Voltage balancing control of a four-level hybrid-clamped converter based on zero-sequence voltage injection using phase-shifted PWM[J]. IEEE Transactions on Power Electronics, 2016, 31(8): 5389-5399.
[22] Pan Jianyu, Yang Yong, Cai Haiwei, et al. Capacitor voltage fluctuation minimization for four-level hybrid clamped converter using improved common-mode voltage injection[J]. IEEE Transactions on Power Electronics, 2020, 35(7): 7563-7573.
[23] Zhao Yihui, Pan Jianyu, Yan Sheng, et al. Novel voltage-balance control of four-level hybrid-clamped converter with open-loop optimized common-mode voltage injection[J]. IEEE Transactions on Power Electronics, 2022, 37(12): 14045-14051.
[24] Chen Jianfei, Li Chengzhi, Li Jianhang, et al. Triple- reference-signal pulse width modulation methods for four-level hybrid-clamped converter[J]. IEEE Transa- ctions on Transportation Electrification, 2024, 10(3): 6195-6209.
[25] Wang Kui, Li Yongdong, Zheng Zedong, et al. Efficiency evaluation of a four-level hybrid-clamped inverter with SiC MOSFETs[C]//2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, 2016: 1264- 1268.
[26] Acquaviva A, Rodionov A, Kersten A, et al. Analytical conduction loss calculation of a MOSFET three-phase inverter accounting for the reverse conduction and the blanking time[J]. IEEE Transa- ctions on Industrial Electronics, 2021, 68(8): 6682- 6691.
Abstract The hybrid clamped converter (HCC) has a broad application prospect in medium and high- voltage variable-frequency speed control systems due to its simple structure, low current harmonics, and small number of devices. However, under low-frequency operation, the DC-link capacitor voltage experiences severe fluctuations, while under high-frequency conditions, its voltage stability is prone to disturbances caused by abrupt operational changes. Additionally, issues such as insufficient utilization of the DC-link voltage remain.
The current vector control method is widely employed in variable-frequency drive systems. However, the introduction of current closed-loop control complicates the capacitor voltage fluctuation mechanism in HCC systems, potentially leading to control failure when handling resistive-inductive (RL) loads.
A mathematical model of HCC under closed-loop load current control is established. Then, a closed-loop common-mode voltage injection balancing method based on capacitor voltage difference extraction is proposed to suppress violent capacitor voltage fluctuations under low-frequency operating conditions. A third-harmonic common-mode voltage angle compensation strategy is introduced for high-frequency operation, which enhances DC-link voltage utilization while maintaining capacitor voltage balancing capability. Finally, the proposed methods are validated through simulations and experiments.
The results demonstrate that the proposed control method outperforms the conventional PW-PWM control method and open-loop common-mode voltage injection approaches in suppressing capacitor voltage fluctuations across a wide frequency range. Under closed-loop output current operation, the proposed method achieves robust capacitor voltage balancing in multiple scenarios, including extreme 0 Hz conditions. It maintains DC output capability. The introduced third-harmonic common-mode voltage angle compensation strategy enables the formation of a saddle wave effect in the superimposed reference waveform, thereby enhancing the utilization of the DC-link voltage. Furthermore, the proposed control method maintains a stable capacitor voltage while accurately tracking current and speed during four-quadrant motor operation.
In addition, a three-phase HCC experimental platform was established. Comparative tests were conducted with the open-loop common-mode voltage injection method under open-loop and closed-loop output current conditions. In contrast, dynamic performance tests and angle compensation strategy validation were performed under closed-loop output current conditions. The results show that the proposed method demonstrates enhanced operational adaptability and superior dynamic capacitor voltage balancing capability. With the incorporation of the angle compensation strategy under high-frequency, high-modulation conditions, the DC-link voltage utilization rate was improved by approximately 14%.
Keywords:Hybrid clamped converter, capacitor voltage balance, closed-loop common-mode voltage injection, angle compensation
中图分类号:TM464
DOI: 10.19595/j.cnki.1000-6753.tces.250131
国家重点研发项目(2024YFB3410601)和重庆市技术创新与应用发展专项重大项目(CSTB2024TIAD-STX0024)资助。
收稿日期 2025-01-19
改稿日期 2025-03-10
潘建宇 男,1989年生,博士,教授,研究方向为中高压变换器控制、SiC电驱动和高电压放电防护技术。
E-mail: panjianyu@ cqu.edu.cn(通信作者)
郭禹伽 女,1999年生,硕士研究生,研究方向为变换器电容电压平衡与电驱系统控制。
E-mail: yujiaguo@stu.cqu.edu.cn
(编辑 陈 诚)