 (
( )。其中,
)。其中, 表示时间轴;
表示时间轴; 表示系统的信号空间,包含了系统所有可能的输入和输出信号;
表示系统的信号空间,包含了系统所有可能的输入和输出信号; 表示系统的行为集合,
表示系统的行为集合, 是以为定义域、为值域的函数的集合,
是以为定义域、为值域的函数的集合, 中的每个元素称为轨迹,其物理意义是信号随时间的变化轨迹,数学上则表示时间轴映射到信号空间的函数。
中的每个元素称为轨迹,其物理意义是信号随时间的变化轨迹,数学上则表示时间轴映射到信号空间的函数。摘要 随着大规模的光伏发电并入主网,光伏与电网的交互作用使光伏并网系统面临次同步振荡的威胁。光伏并网系统具有高维复杂、强非线性、强不确定等动态特性,传统基于模型的次同步振荡抑制策略失效风险显著加剧。为解决该问题,该文建立响应信息和系统行为的桥梁,提出一种Koopman响应驱动预测控制的光伏并网系统次同步振荡鲁棒抑制策略。首先,基于系统行为学理论将系统进行有限时域数据重构,并在Koopman线性化观测空间中准确辨识非线性系统的动态行为;其次,将系统行为的辨识、预测与控制融入最优控制策略设计中,并引入正则化与松弛技术以增强控制鲁棒性,进而通过滚动优化实现次同步振荡的在线抑制;最后,通过时域仿真和硬件在环实验,在噪声干扰、参数变化、源/荷波动、电网拓扑变化等不确定条件下,验证了该抑制策略的有效性、鲁棒性和实用性。
关键词:次同步振荡 响应驱动预测控制 非线性 Koopman算符 鲁棒性
为实现“碳达峰、碳中和”的目标[1],以风电、光伏为代表的新能源正逐步取代传统同步电机,成为新型电力系统的主力电源。在各类新能源中,光伏凭借清洁环保、资源丰富和分布广泛等优势,已成为全球发电结构优化和能源结构改革不可或缺的组成部分[2]。截至2024年6月底,我国光伏发电装机容量约7.14亿kW,装机位列世界首位。然而,由于光伏发电固有的弱抗扰特性与低阻尼特性,其与电网的动态交互显著加剧了电力系统的次同步振荡(Subsynchronous Oscillation, SSO)失稳风险。近年来,中国西北地区、美国弗吉尼亚州、加拿大安大略省等地报道了由光伏电站引发的次同步振荡事件,这导致机组脱网,严重危害电力系统的安全稳定运行[3-7]。因此,针对光伏并网系统,研究并设计有效且先进的次同步振荡抑制策略具有重要意义。
在光伏并网系统的次同步振荡抑制方面,目前国内外学者所提策略基本依赖系统模型,主要包括优化调节光伏逆变器参数[8]和附加阻尼控制[9-12]两类。文献[8]指出合理调节光伏逆变器的锁相环和电流环参数,可以降低系统发生次同步振荡的风险。文献[9]采用阻尼转矩法为光伏并网系统引发次同步振荡的主支路设计附加阻尼控制,通过阻尼补偿实现次同步振荡抑制。文献[10]采用静止无功发生器(Static Var Generator, SVG)附加阻尼控制,使其等效为正电阻、消耗振荡能量以抑制次同步振荡。此外,区别于传统控制方法对模型的高精度要求,模型预测控制具备对模型精度兼容性强、抗干扰能力强和控制鲁棒性强等特点[13-15]。文献[11-12]采用模型预测控制设计附加阻尼控制器,有效实现光伏并网系统次同步振荡抑制与变流器并网系统的高频和次/超同步振荡抑制。
然而,光伏并网系统是一个高度电力电子化、高度非线性且高维复杂的系统,难以获取和建立精确的数学模型,并且所处环境具有不确定、时变等特征。因此,上述基于复杂动力学系统数字仿真分析与离线参数设计的振荡抑制策略在特性认知依赖系统模型、参数设计依赖固定工况以及振荡抑制失效风险加剧等方面的弊端开始显现。亟须设计响应驱动式的振荡抑制策略,以适应电力系统新挑战,从而实现光伏并网系统的实时评估与实时控制。
近年来,新型电力系统的规划建设中智能量测设备广泛部署以及通信水平迅速提高,使得利用海量历史和实时量测数据进行次同步振荡分析与抑制日渐可行[16-17]。但是,基于机器学习技术的纯数据驱动控制[18-19]存在可解释性差、计算成本高、难以实时决策控制等问题,并不能完美匹配响应驱动式稳定控制的理论和技术需求。而系统行为学理论能够利用输入、输出数据非参数化重构系统的动态行为,为采用响应信息辨识、预测和控制系统行为提供理论基础。该理论最早由J. C. Willems于1987年在文献[20]中提出,其包含严谨的数学模型推导和系统辨识过程,指出线性时不变(Linear Time Invariant, LTI)系统的系统行为在持续激励条件下可通过历史轨迹线性表征[21]。该理论展现出与包含模型预测控制在内的线性控制技术的高度适配性,具备低数据需求、高计算效率的优势。
虽然系统行为学理论指导下的响应驱动预测控制技术在LTI系统中已取得显著的研究成果,但如何将该控制技术拓展应用到非线性系统中仍然是一个悬而未决的问题。光伏并网系统中次同步振荡现象的非线性特征显著,单一工作点处的线性化模型不能准确表征其在整个工作域内的受扰特性[4-7]。而Koopman算符作为描述哈密顿动力系统量测量演化的理论[22],通过构造线性演化的观察函数观测非线性系统,能够实现对非线性动力系统的线性化分析[23-24]。因此,基于结合Koopman算符的系统行为学理论设计响应驱动预测控制,对抑制光伏并网系统的次同步振荡具有理论与应用的双重必要性。
综上所述,由于光伏并网系统具有高维复杂、强非线性、强不确定等特点,传统基于精确数学模型的次同步振荡抑制策略失效风险加剧。响应驱动预测控制虽能为光伏并网系统的稳定运行提供重要支撑,但其依托的系统行为学理论在拓展应用于非线性系统时,仍面临显著困难。为此,本文提出一种适应于光伏并网系统的Koopman响应驱动预测控制的次同步振荡抑制策略,主要贡献为:
(1)从系统行为学理论出发,实现在Koopman线性化观测空间中对非线性系统动态行为的准确辨识,为响应驱动的次同步振荡抑制提供有效的预测技术。
(2)构建Koopman响应驱动预测控制的次同步振荡抑制框架,将系统行为的辨识、预测与控制有机融入单一的线性二次型优化问题中,能够实现在线多步滚动优化,从而抑制次同步振荡。
(3)提出鲁棒性增强的Koopman响应驱动预测控制策略,揭示正则化与松弛技术的鲁棒性增强机理,并通过最优控制律解析表达来设计抑制策略的快速求解方法。
(4)通过不同光伏并网系统场景下的时域仿真和硬件在环实验,验证了所提次同步振荡抑制策略的有效性、鲁棒性和实用性。
为研究光伏并网系统的动态演化规律,本文以响应信息作为主要驱动因素,采用结合Koopman算符的系统行为学理论辨识该非线性系统。
与传统的采用卷积、传递函数或状态空间描述动态系统输入、输出关系的方式不同,系统行为学将动态系统定义为一组轨迹的集合,并将这组轨迹称为系统的“行为”[20]。该理论直接从观测轨迹出发研究系统的动态演化,是一种响应驱动的方法。根据系统行为学理论,动态系统可表示成一个三元组()。其中,表示时间轴;表示系统的信号空间,包含了系统所有可能的输入和输出信号;表示系统的行为集合,是以为定义域、为值域的函数的集合,中的每个元素称为轨迹,其物理意义是信号随时间的变化轨迹,数学上则表示时间轴映射到信号空间的函数。
考虑一个LTI系统,其状态空间模型可表示为
 (1)
(1)
式中,系统矩阵
 。m、n和p为分别为系统的输入维度、状态维度和输出维度。假设式(1)为该动态系统的最小实 现[25],该LTI系统行为的参数化状态空间模型见附录第1节,其非参数模型可通过如下分析构建。
。m、n和p为分别为系统的输入维度、状态维度和输出维度。假设式(1)为该动态系统的最小实 现[25],该LTI系统行为的参数化状态空间模型见附录第1节,其非参数模型可通过如下分析构建。
离散实值轨迹 是从自然数集合
是从自然数集合 (时间轴)映射到q维实向量集合
(时间轴)映射到q维实向量集合 的函数,=[ud yd]T,通常将时间轴
的函数,=[ud yd]T,通常将时间轴 限制在有限长度Nd的区间[1, Nd]上,则
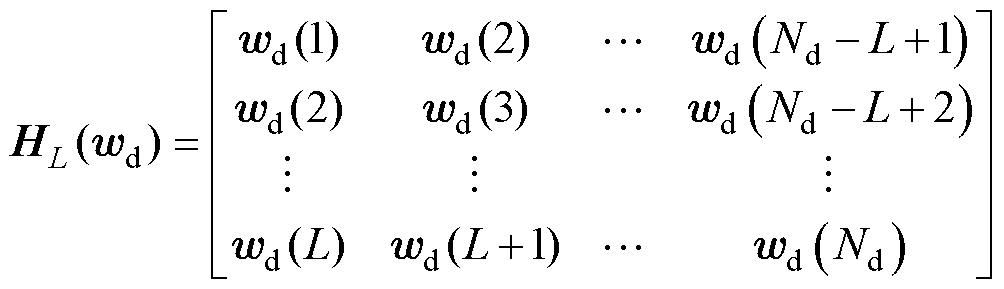
限制在有限长度Nd的区间[1, Nd]上,则 ,其中下标d表示数据(data)。给定系统的一条长轨迹,并构建多条采样长度为L的短轨迹,L<Nd。这些长度为L的轨迹集合可以构成一个维度为(qL)´(Nd-L+1)的Hankel矩阵[21],其表达形式为
,其中下标d表示数据(data)。给定系统的一条长轨迹,并构建多条采样长度为L的短轨迹,L<Nd。这些长度为L的轨迹集合可以构成一个维度为(qL)´(Nd-L+1)的Hankel矩阵[21],其表达形式为
 (2)
(2)
从式(2)中可以看出,Hankel矩阵的每一列都是长度为L的采样轨迹,这些轨迹的集合属于有限时间轴[1, L]上的系统行为 。结合附录中LTI系统行为的参数化状态空间模型式(A2)可知,此Hankel矩阵的秩受的维度限制,其上界为
。结合附录中LTI系统行为的参数化状态空间模型式(A2)可知,此Hankel矩阵的秩受的维度限制,其上界为 。当Hankel矩阵
。当Hankel矩阵 的秩等于时,轨迹持续激励L阶[21],此时受限行为可作为系统的有限时域数据表征,由于前者可以通过轨迹直接表示,记作=image()。
的秩等于时,轨迹持续激励L阶[21],此时受限行为可作为系统的有限时域数据表征,由于前者可以通过轨迹直接表示,记作=image()。
系统行为学理论的基本引理首次在文献[21]中作为关键结论提出,其给出了由系统轨迹指定的离散时间LTI系统的非参数表示的存在条件,从而衔接起响应信息和系统行为。该基本引理认为,若满足如下三个条件:① 为系统的轨迹,l<N≤Nd,其中l为使系统能控能观的最小整数;②轨迹持续激励L阶;③系统可控,则存在向量
为系统的轨迹,l<N≤Nd,其中l为使系统能控能观的最小整数;②轨迹持续激励L阶;③系统可控,则存在向量 ,使得轨迹
,使得轨迹 表示为各列的线性组合,即
表示为各列的线性组合,即
 (3)
(3)
结合=[u y]T,以上分析表明,离散可控LTI系统的非参数模型可以完全通过输入、输出数据所构建,且系统中长度为L的任何采样轨迹都可以通过系统轨迹的Hankel矩阵进行线性张成。
实际光伏并网系统的动态过程是高度非线性的,Koopman算符能够通过坐标变换提供非线性系统在线性观测空间中的动态刻画。将离散非线性动态系统写作 ,定义Koopman算符
,定义Koopman算符 是一个作用在观测函数
是一个作用在观测函数 上的线性运算符,满足
上的线性运算符,满足
 (4)
(4)
由于Koopman算符是线性算符,可以对其进行谱分解[26]。定义Koopman算符的特征函数ji与相应的特征值li满足
 (5)
(5)
当观测函数位于特征函数j1, j2, j3, …张成的空间内时,观测函数可以由特征函数按式(6)形式表征。
 (6)
(6)
式中,特征函数的展开系数vi定义为Koopman模式[26],则通过构造升维的观测空间实现了非线性系统的全局线性化。
由于Koopman算符通常是无限维的,出于实际应用目的考虑其有限维近似,常用的数值近似方法包括动态模式分解(Dynamic Mode Decomposition, DMD)[27]、扩展动态模式分解(Extended Dynamic Mode Decomposition, EDMD)[28-29]等方法。因此,通过合理地选取一组观测函数作为基并进行坐标变换,Koopman算符能够借助响应信息构建线性数学模型,从而实现对非线性系统的辨识。
为了刻画光伏并网系统的内在非线性,分两步对观测函数 进行构建。步骤1:结合该系统的先验知识,选择隐含三角函数sin
进行构建。步骤1:结合该系统的先验知识,选择隐含三角函数sin 、cos的多项式基函数PolyT-Qg作为Koopman观测函数[28-29],为跟网型光伏并网逆变器的锁相环相角,Qg表示状态变量的单项式最高阶数。其中,多项式表示一类广义光滑函数的Taylor级数近似,而三角函数与电力系统的波形产生、相角控制、功率因数校正等物理特性强相关。步骤2:为解决工程实践中可能面临的模型发现能力不足的问题,扫描筛选高阶观测函数候选集以进行观测量校正。高阶观测函数候选集为Qg+1阶的多项式观测函数集合,迭代扫描该候选集中的观测量,并保留在量测数据集上能显著降低模型回归误差的观测量。该模型回归问题通过最小化方均误差形式的损失函数来实现,表示为
、cos的多项式基函数PolyT-Qg作为Koopman观测函数[28-29],为跟网型光伏并网逆变器的锁相环相角,Qg表示状态变量的单项式最高阶数。其中,多项式表示一类广义光滑函数的Taylor级数近似,而三角函数与电力系统的波形产生、相角控制、功率因数校正等物理特性强相关。步骤2:为解决工程实践中可能面临的模型发现能力不足的问题,扫描筛选高阶观测函数候选集以进行观测量校正。高阶观测函数候选集为Qg+1阶的多项式观测函数集合,迭代扫描该候选集中的观测量,并保留在量测数据集上能显著降低模型回归误差的观测量。该模型回归问题通过最小化方均误差形式的损失函数来实现,表示为
 (7)
(7)
式中,K为Koopman算符的近似值;D为对应量测数据集的数据量。观测函数与Koopman算符近似值K成对出现并被迭代优化。
鉴于系统行为学理论提供了一种描述LTI系统的响应驱动辨识方式,而Koopman算符能够将非线性系统映射到通用的LTI模型中[27-29],故Koopman算符可用于将系统行为学理论推广应用到任何未知的非线性系统中。对于非线性系统,在Koopman算符的作用下,其升维后的状态空间模型可表示为
 (8)
(8)
式中,通过升维而全局线性化的矩阵 ,
, ,上述矩阵可利用EDMD方法辨识得到;升维状态变量
,上述矩阵可利用EDMD方法辨识得到;升维状态变量 ,观测函数
,观测函数 ,nlift为升维后的状态维度。
,nlift为升维后的状态维度。
类比于1.1节对LTI系统的非参数模型的构建,已知系统轨迹=[ud yd zd]T与=[u y z]T,当非线性系统满足轨迹持续激励L阶时,意味着增广矩阵 的秩与
的秩与 的秩相等,同为
的秩相等,同为
 ,并且要求非线性系统在Koopman算符作用下的观测空间中是可控的,那么,升维后的系统中长度为L的任何采样轨迹都可以通过系统轨迹的Hankel矩阵进行线性张成,即
,并且要求非线性系统在Koopman算符作用下的观测空间中是可控的,那么,升维后的系统中长度为L的任何采样轨迹都可以通过系统轨迹的Hankel矩阵进行线性张成,即 ,
, 。
。
因此,通过将Koopman算符有机融入系统行为学理论,实现了在线性化观测空间中对非线性系统动态行为的准确辨识。所得非参数模型作为连接响应信息和复杂系统动态行为的桥梁,为响应驱动的非线性系统的辨识、预测和控制奠定了理论基础。
本节基于Koopman-系统行为学理论,提出适应于光伏并网系统的响应驱动预测控制策略,基于响应信息实现对该非线性系统中可能遭受的次同步振荡的有效抑制。其中,响应驱动预测控制是一种利用响应信息进行LTI系统辨识、预测和控制的技术,Koopman算符则为处理光伏并网系统的非线性问题提供了关键的线性化手段,二者结合构成了抑制光伏并网系统次同步振荡的核心方法。
根据对次同步振荡事件的调查研究与机理分 析[3-9]可知,大规模光伏发电通过弱交流系统并网时,存在不稳定振荡风险,且光伏并网逆变器对次同步振荡的特性有重要影响。因此,在本文所设计的次同步振荡抑制策略中,选取光伏并网逆变器控制回路中的电气量及其参考值作为控制信号[11]。所提抑制策略通过量测光伏并网系统的输入及其对应时序的响应信息,将系统行为的辨识、预测与控制有机地融入单一的线性二次型优化问题中进行高效求解。
为抑制光伏并网系统的次同步振荡,设计基于Koopman响应驱动预测控制的次同步振荡鲁棒抑制策略(SSO Robust Suppression Strategy via Koopman- based Response-Driven Predictive Control, KRDPC- SRSS)的控制框架,如图1所示。首先,采集光伏并网系统的时序响应信息,并构造其深度为L的Hankel矩阵。其次,建立Koopman观测空间下的系统预测模型,并设计鲁棒性增强的目标函数与约束条件。然后,通过优化求解目标函数得到t时刻系统在预测时域Tf内的控制序列 ,并将控制序列
,并将控制序列 的前Nc步控制元素作为系统输入,同时更新该时刻目标函数约束中的量测数据。通过利用响应信息反馈校正、反复迭代,并且实时更新数据集和控制指令,最终可以实现整个光伏并网系统的滚动优化控制,保证系统输出达到期望运行状态,从而有效地抑制次同步振荡。
的前Nc步控制元素作为系统输入,同时更新该时刻目标函数约束中的量测数据。通过利用响应信息反馈校正、反复迭代,并且实时更新数据集和控制指令,最终可以实现整个光伏并网系统的滚动优化控制,保证系统输出达到期望运行状态,从而有效地抑制次同步振荡。
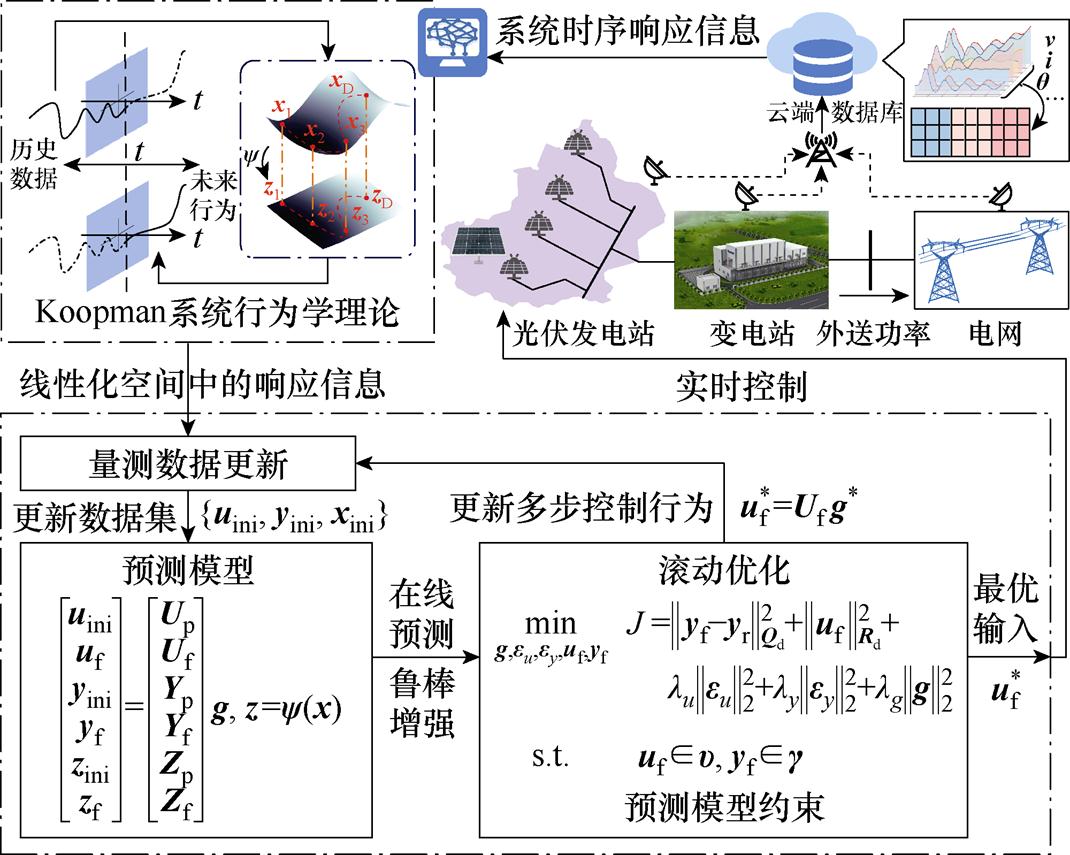
图1 光伏并网系统KRDPC-SRSS的设计框架
Fig.1 Design framework of KRDPC-SRSS for PV grid-connected system
Koopman响应驱动预测控制利用采集到的Koopman观测空间中的响应信息作为辨识系统模型的主要指导,并将其嵌入至预测控制中实现对非线性系统的控制。考虑到实际光伏并网系统控制过程存在于不确定环境[8, 30](例如量测噪声、参数不确定、气象条件的随机波动)中,总会受到预先未知的各种不确定性的影响,存在预测模型与实际状态失配的风险,因此鲁棒性增强手段被引入所提的抑制策略中。
2.2.1 预测控制的原理
预测控制,又称滚动时域控制,是一种基于动态优化的控制技术。其基本思路是通过预测模型和当前时刻的状态信息预测系统的未来动态,并在此基础上求解一个有限时域开环最优控制问题而获得系统的最优输入。预测控制由预测模型、滚动优化和反馈校正三个要素组成[11-15]。
预测控制基本原理如图2所示,Tf为预测时域,即向前预测的步长数;Nc为滚动控制步长,通常设置为1,即在每次滚动优化中仅实施控制序列的第1个控制行为[11-15]。
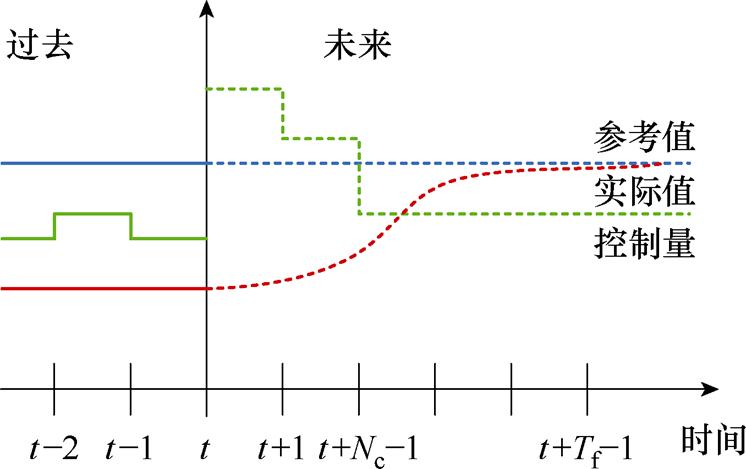
图2 预测控制的基本原理
Fig.2 Basic principle of predictive control
而在电力系统的响应驱动控制过程中,为了提高算法效率和减轻计算负担,采用多步滚动优化策略,即一次预测实施多步控制行为,需设置整数Nc满足1≤Nc≤Tf。相应地,所提预测控制的控制周期为采样周期的Nc倍。
2.2.2 预测模型
根据引发光伏并网系统次同步振荡的主要因素和实际量测条件,选取相应的输入u和输出y[9-11]。从初始时刻开始,分别采集光伏并网系统的输入信号和输出信号,采样长度为T。根据该采样轨迹可构造深度为L的Hankel矩阵 ,其中=[u y]T。
,其中=[u y]T。
若采用LTI系统模型表征光伏并网系统,则根据系统行为学理论可知,当光伏并网系统的输入u、输出y信号所构成轨迹持续激励L阶时,系统行为可以通过历史轨迹进行有限时域数据表征。此时LTI系统中任意长度为L的轨迹都可以表示为 ,
, 。据此,LTI系统任意长度为L的连续输入、输出可表示为
。据此,LTI系统任意长度为L的连续输入、输出可表示为
 (9)
(9)
将系统的输入和输出分为过去和将来两部分,式(9)可写成
 (10)
(10)
式中,uini、yini分别为系统的初始输入、输出;uf、yf分别为系统的预测输入、输出;Tini为初始采样长度,满足Tini +Tf=L。为保证预测模型的有效性和持续激励的要求[21],通常会采集足够长的可控系统的量测数据序列T,满足T≥(m+1)(Tini+Tf+n)-1。
而考虑到光伏并网系统中次同步振荡的非线性特征显著,利用LTI系统模型进行表征存在局限 性[4-7],这将导致该响应驱动式的预测准确度偏低。为此,采用非线性系统模型表征光伏并网系统,量测数据集包含{u, y, x},采样轨迹需增广为= [u y z]T( ),则系统在Koopman观测空间中的预测模型为
),则系统在Koopman观测空间中的预测模型为
 (11)
(11)
相应地,可控系统的量测数据序列T需要满足T≥(m+1)(Tini+Tf+nlift)-1。
2.2.3 鲁棒性增强的控制模型与算法流程
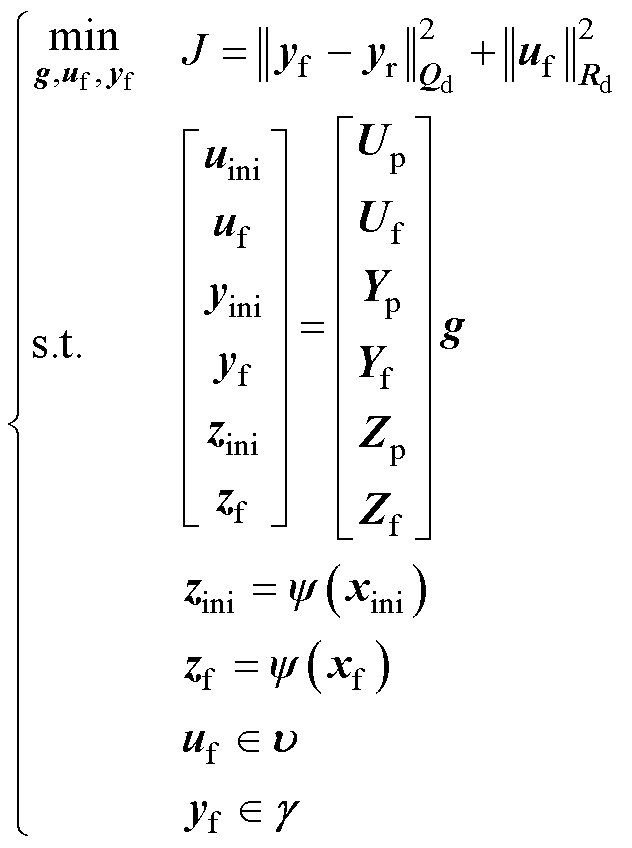
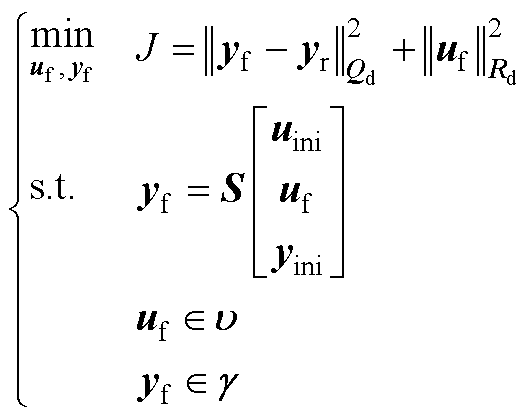
若采用LTI模型表征光伏并网系统,结合光伏并网系统的预测模型式(10),并给定系统的期望输出,就可以设计整个系统响应驱动预测控制的目标函数和相应的约束条件为
 (12)
(12)
式中,yr为光伏并网系统期望输出,根据系统的稳定运行状态设定;对于一个向量a, 表示二次型aTPa,||a||对应其Euclidean范数;Qd与Rd分别为输出权重矩阵和输入权重矩阵;
表示二次型aTPa,||a||对应其Euclidean范数;Qd与Rd分别为输出权重矩阵和输入权重矩阵; 与
与 分别对应系统输入可行域和系统输出可行域。将预测模型分解为[uini uf yini]T=[Up Uf Yp]Tg以及yf=Yfg,响应驱动预测控制的形式等价于子空间预测控制(Subspace Predictive Control, SPC)[31-32]。子空间预测控制在电力系统的振荡抑制中已有研究、应用[33-34],其数学表达见附录第2节。
分别对应系统输入可行域和系统输出可行域。将预测模型分解为[uini uf yini]T=[Up Uf Yp]Tg以及yf=Yfg,响应驱动预测控制的形式等价于子空间预测控制(Subspace Predictive Control, SPC)[31-32]。子空间预测控制在电力系统的振荡抑制中已有研究、应用[33-34],其数学表达见附录第2节。
一方面,为了保证对光伏并网系统中非线性特征的精准刻画,选用基于Koopman观测空间描述的非线性系统模型表征光伏并网系统,则在预测模型的基础上,响应驱动预测控制的目标函数和相应的约束条件为
 (13)
(13)
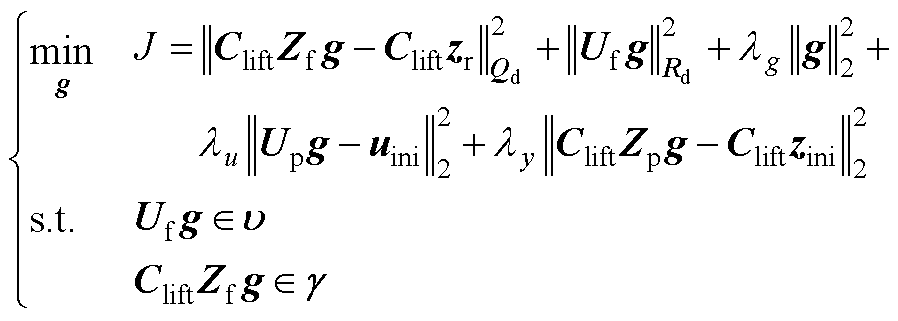
另一方面,在实际系统中,由于量测数据受到噪声、参数不确定性等干扰,式(13)中的等式约束条件不可避免地存在失配。为提高模型的泛化能力和避免过拟合,松弛变量[35]、正则化技术[36]被广泛引入优化问题与机器学习中。鉴于此,引入松弛变量 和
和 来保证不确定环境中等式约束的成立,并使用L2正则化约束松弛变量和以及决策变量g,那么改进后的目标函数和约束条件为
来保证不确定环境中等式约束的成立,并使用L2正则化约束松弛变量和以及决策变量g,那么改进后的目标函数和约束条件为
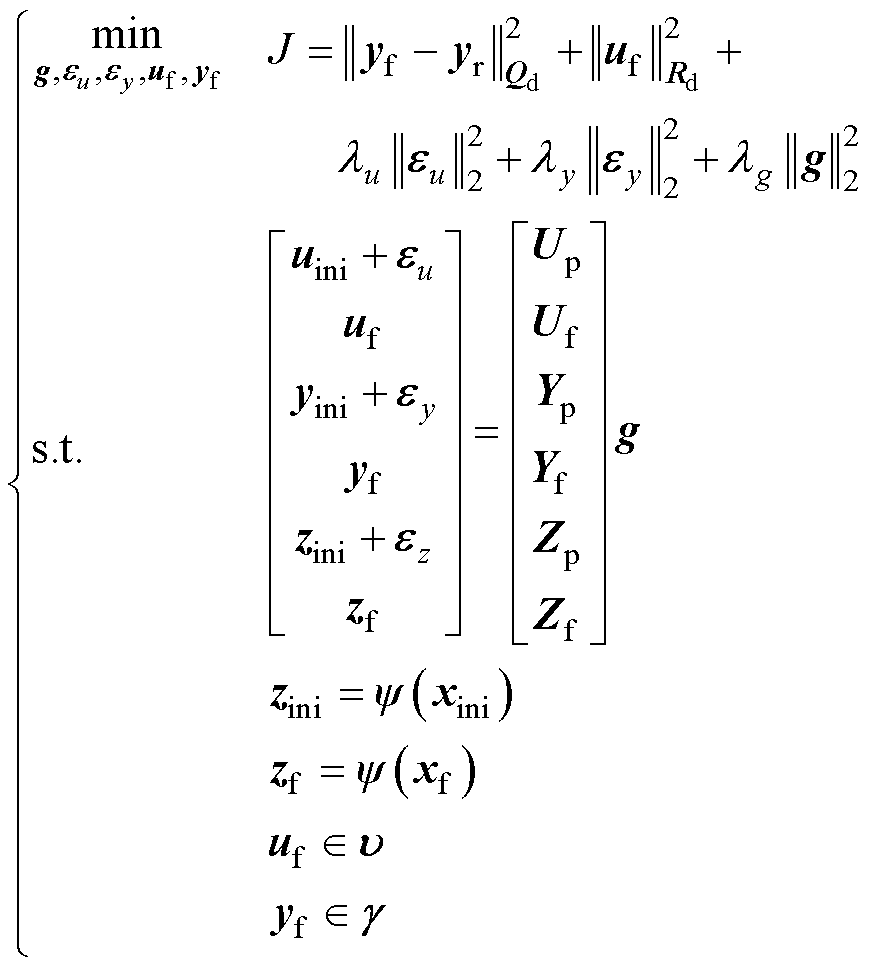 (14)
(14)
式中, 、
、 和
和 分别为对应变量、和g的正则化参数,其数值为正,大小根据系统中的不确定性强弱所决定。改进后的优化模型不再受限于模型中确定性的等式约束,引入的松弛变量能够保证系统在不确定条件中仍能得到可行解,提高了抑制策略应对噪声、参数不确定性的能力。此外,L2正则化对抑制策略鲁棒性增强的理论证明详见附录第3节。
分别为对应变量、和g的正则化参数,其数值为正,大小根据系统中的不确定性强弱所决定。改进后的优化模型不再受限于模型中确定性的等式约束,引入的松弛变量能够保证系统在不确定条件中仍能得到可行解,提高了抑制策略应对噪声、参数不确定性的能力。此外,L2正则化对抑制策略鲁棒性增强的理论证明详见附录第3节。
通过求解式(14)所示的线性二次型优化问题,得到当前t时刻的最优决策变量 ,并将其代入预测模型中,进而求得光伏并网系统预测时域Tf内的最优控制律
,并将其代入预测模型中,进而求得光伏并网系统预测时域Tf内的最优控制律 。该控制律的解析表达式可在附录第4节中推导得出,能够作为KRDPC-SRSS的快速求解方法。然后,采用多步滚动优化策略,将
。该控制律的解析表达式可在附录第4节中推导得出,能够作为KRDPC-SRSS的快速求解方法。然后,采用多步滚动优化策略,将 的前Nc步控制元素施加到光伏并网系统中。
的前Nc步控制元素施加到光伏并网系统中。
综上所述,为抑制光伏并网系统的次同步振荡,计及鲁棒性增强的Koopman响应驱动预测控制的算法流程如图3所示。
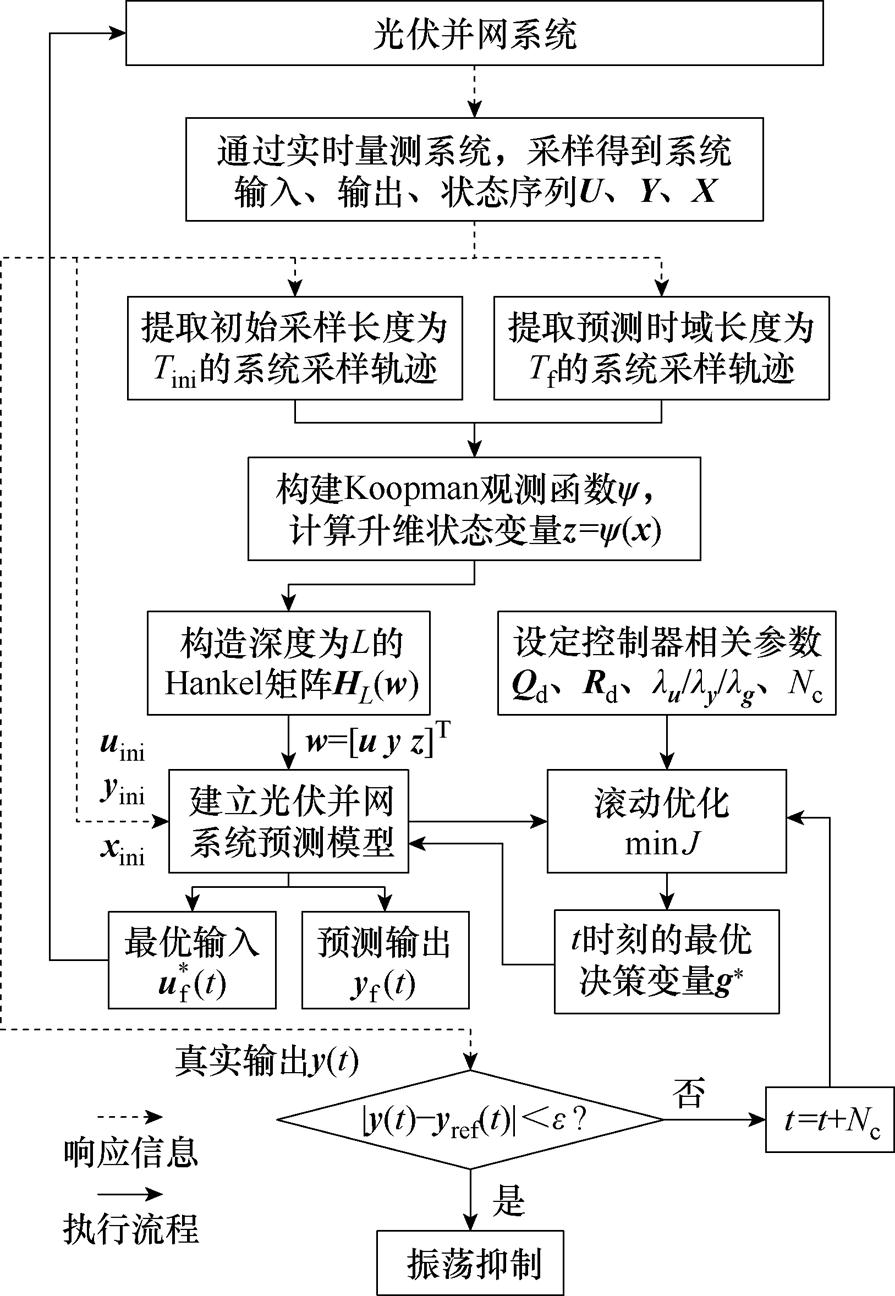
图3 光伏并网系统KRDPC-SRSS的流程
Fig.3 Flow chart of KRDPC-SRSS for PV grid-connected system
为验证所提KRDPC-SRSS的次同步振荡抑制效果,在Matlab/Simulink上搭建如图4所示含光伏并网的IEEE 39节点系统进行仿真。图4a展示了该多机电力系统的拓扑,G5~G8与G10为火电机组;G1~G4与G9为通过跟网型逆变器并网的光伏电站,该类型逆变器包含锁相环、电压环和电流环等控制环节。并网光伏电站的结构及控制环节如图4b所示,光伏阵列发出的直流电能经逆变器转换为与电网频率相同的交流电能,经LCL滤波器输送给电力系统,其数学模型详见文献[11]的已有研究。系统基准功率为100 MV·A,基准电压为345 kV。
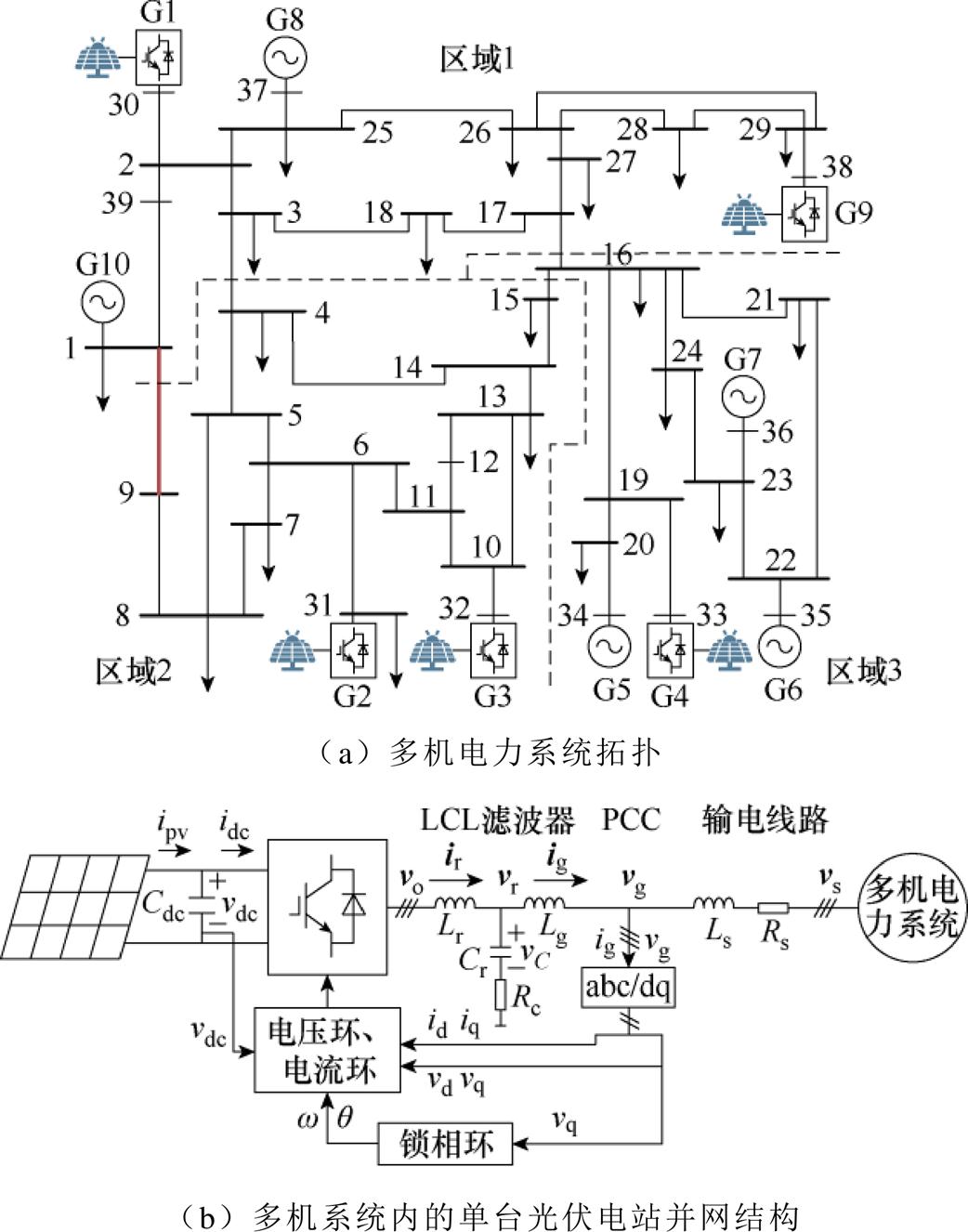
图4 含光伏并网的IEEE 39节点系统
Fig.4 PV grid-connected modified IEEE 39-bussystem
所提KRDPC-SRSS的响应驱动式次同步振荡抑制具体由以下三个环节顺序进行:
1)次同步振荡观测(0~4.2 s)
已有文献[8]研究表明,光伏并入弱交流电网系统存在锁相环主导的次同步振荡风险;在锁相环控制参数变化(减小锁相环比例系数或增加其积分系数)、电网强度变弱等情况下,光伏电站与电网之间的动态交互作用向光伏并网系统提供负阻尼,进而引发次同步振荡。在上述高比例光伏接入的电力系统中,将光伏电站G1的并网逆变器锁相环PI控制环节的比例系数Kp_pll和积分系数Ki_pll分别从31.42和247更改为17.45和3 700,以激发次同步振荡。
光伏并网系统在3 s左右开始观测到次同步振荡。结合光伏电站G1锁相环角频率的量测数据,应用快速傅里叶变换(Fast Fourier Transform, FFT)对其频谱分析可知:锁相环参数变化导致了光伏并网系统发生了频率约为30 Hz的次同步振荡,图5中所示幅值为其相比于稳定状态值的百分比。
2)响应信息采集(4.2~4.5 s)
在各台光伏电站的并网逆变器上施加KRDPC- SRSS控制器,各控制器以分散式控制的形式实现,仅依赖光伏并网公共耦合点(Point of Common Coupling, PCC)以内的反映并网逆变器运行状态的本地量测数据。选取光伏并网逆变器锁相环相角的增量和电流内环中q轴电流参考值 的增量作为KRDPC-SRSS的控制信号,即系统输入
的增量作为KRDPC-SRSS的控制信号,即系统输入 与uiq;选取光伏电站角频率
与uiq;选取光伏电站角频率 、光伏电站出力Ppv、dq轴坐标系下的逆变器并网电流id和iq作为系统输出。在KRDPC-SRSS未激活之前,通过与uiq向光伏电站注入随机持续激励信号,该激励信号为大小在[-0.1, 0.1]之间的随机高斯噪声,并采集采样长度T=300的输入、输出数据构建Hankel矩阵,采样周期为1 ms。
、光伏电站出力Ppv、dq轴坐标系下的逆变器并网电流id和iq作为系统输出。在KRDPC-SRSS未激活之前,通过与uiq向光伏电站注入随机持续激励信号,该激励信号为大小在[-0.1, 0.1]之间的随机高斯噪声,并采集采样长度T=300的输入、输出数据构建Hankel矩阵,采样周期为1 ms。
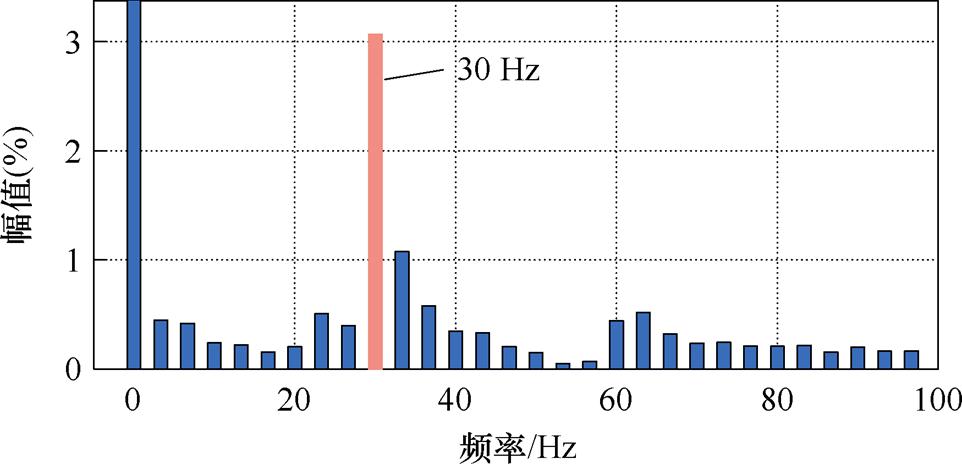
图5 光伏并网系统中光伏电站G1角频率FFT分析
Fig.5 FFT analysis of angular frequency of PV plant G1 in PV grid-connected system
3)控制器激活(始于4.5 s)
在t=4.5 s时,激活光伏并网系统的KRDPC- SRSS,设置滚动控制步长Nc=5,即控制周期为5 ms。设置输出权重矩阵Qd的对角元素均为3,输入权重矩阵Rd的对角元素均为0.01,正则化参数 、
、 和
和 分别为1 000、1 000和1。选择隐含三角函数的多项式观测函数PolyT-Qg作为观测函数,Qg设为2。令初始采样长度Tini=12,预测时域长度Tf=20,此时,T=300,m=2,n=14[11],nlift=41,满足T≥(m+1)(Tini+Tf+nlift)-1的系统行为持续激励条件。通过0~6 s对系统响应驱动式的量测、辨识与控制,KRDPC-SRSS实现了如图6所示的次同步振荡抑制效果。
分别为1 000、1 000和1。选择隐含三角函数的多项式观测函数PolyT-Qg作为观测函数,Qg设为2。令初始采样长度Tini=12,预测时域长度Tf=20,此时,T=300,m=2,n=14[11],nlift=41,满足T≥(m+1)(Tini+Tf+nlift)-1的系统行为持续激励条件。通过0~6 s对系统响应驱动式的量测、辨识与控制,KRDPC-SRSS实现了如图6所示的次同步振荡抑制效果。
图6表明,在控制器激活后,KRDPC-SRSS能够保证10台发电站角频率与联络线1-9有功功率振荡幅值的快速衰减;其抑制次同步振荡直至系统稳定的平抑时间为0.27 s。在所有发电站角频率中,光伏电站G1的角频率 振荡幅值最大、抑制效果最明显,则后续分析结果只展示光伏电站G1的角频率信息。因此,KRDPC-SRSS能够快速平抑火电机组和光伏电站内以及联络线上的次同步振荡,有效改善光伏并网系统的动态稳定性能。
振荡幅值最大、抑制效果最明显,则后续分析结果只展示光伏电站G1的角频率信息。因此,KRDPC-SRSS能够快速平抑火电机组和光伏电站内以及联络线上的次同步振荡,有效改善光伏并网系统的动态稳定性能。
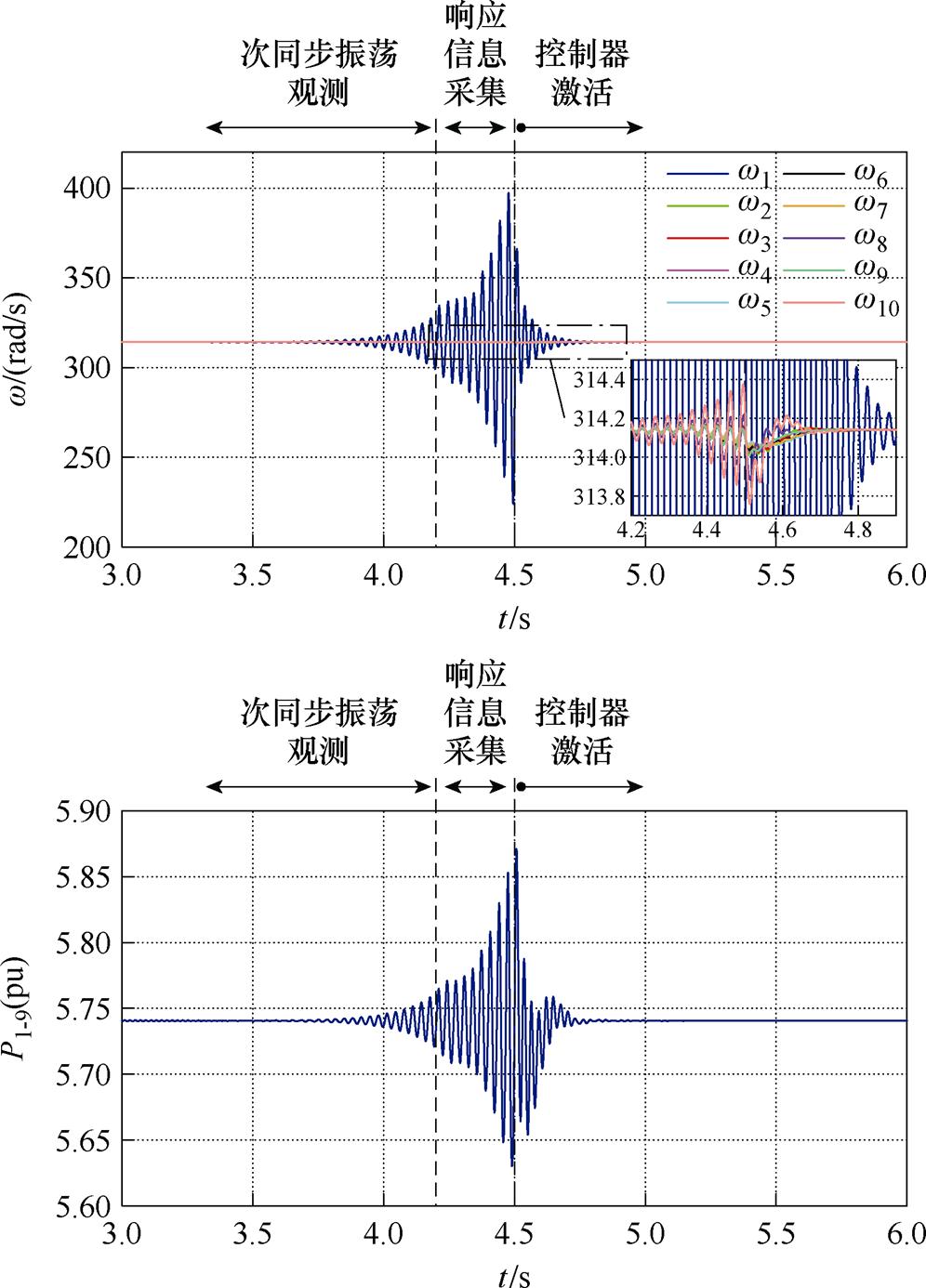
图6 10台发电站角频率与联络线有功功率的响应曲线
Fig.6 Response curves of angular frequencies of 10 plants and active power of tie line
实际光伏并网系统的控制过程存在于不确定环境中,为了验证KRDPC-SRSS应对各种不确定性的鲁棒性,算例对噪声干扰、锁相环参数变化、光强或负荷的随机波动、电网拓扑结构变化等不确定性进行测试,并比较分析KRDPC-SRSS的控制性能。
3.2.1 量测噪声的干扰
为验证应对量测噪声的控制鲁棒性,在量测数据中附加随机高斯噪声模拟量测噪声,并分别选取大小在[-0.001, 0.001]或[-0.05, 0.05]之间的噪声,以测试系统在不同强度噪声干扰下的响应情况。[-0.001, 0.001]量测噪声下的系统响应曲线如图7所示。[-0.05, 0.05]量测噪声下的受控系统响应曲线如图8所示。鉴于光伏电站的4个输出量中iq数值更小,更能直观地反映噪声带来的影响,则研究其预测输出与真实输出的偏差以分析抑制策略中预测模型的预测性能。
本文采用以下三种抑制策略进行测试,对比分析次同步振荡抑制策略的控制性能:
策略1:本文所提的KRDPC-SRSS策略;策略2:基于Koopman算符的响应驱动模型预测控制策略[29],该策略中无鲁棒性增强的设计,并且辨识与控制顺序进行;策略3:子空间预测控制(Subspace Predictive Control, SPC)策略[34]。
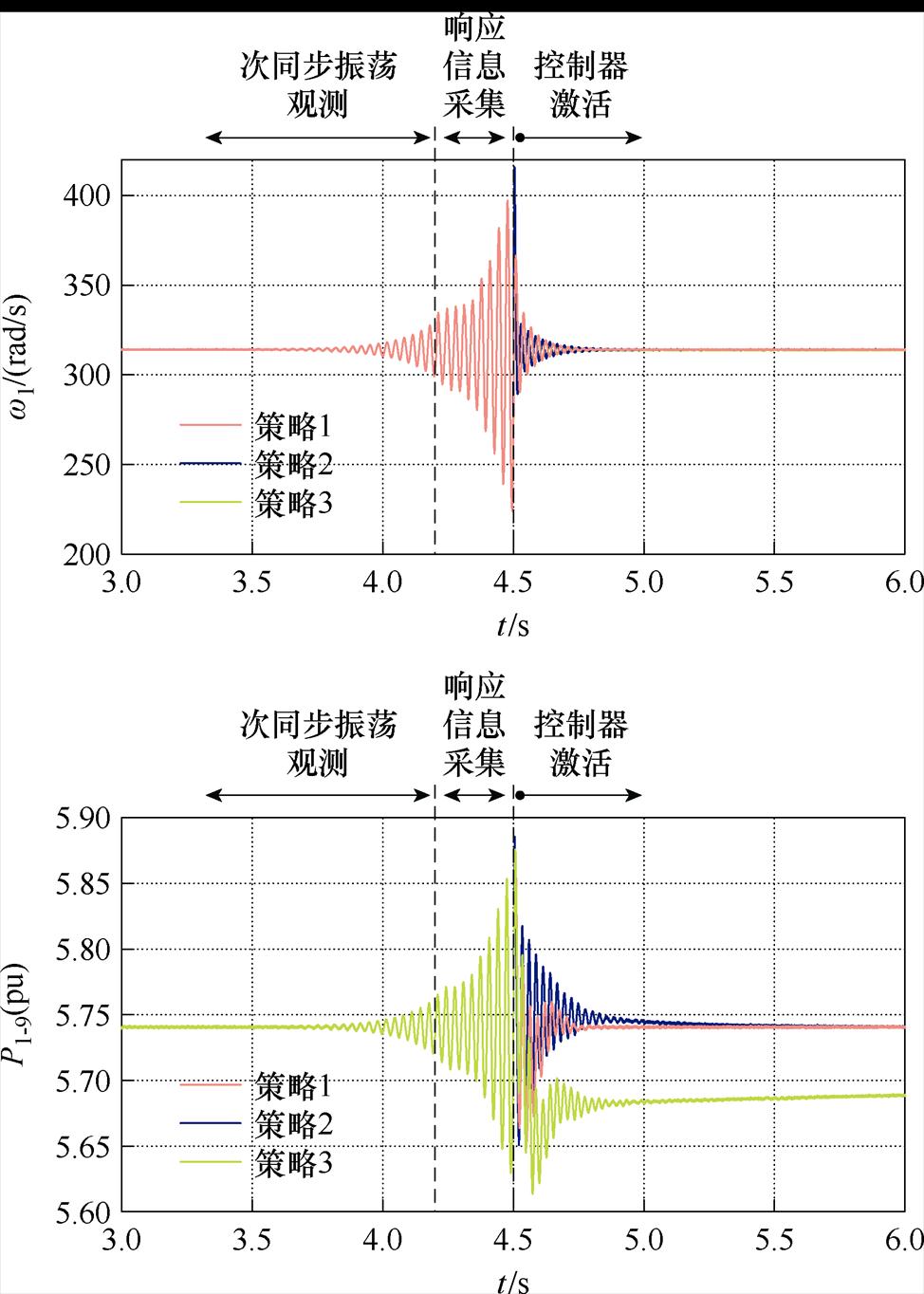
图7 [-0.001, 0.001]量测噪声下的系统响应曲线
Fig.7 Response curves of the controlled system under measurement noise of [-0.001, 0.001]
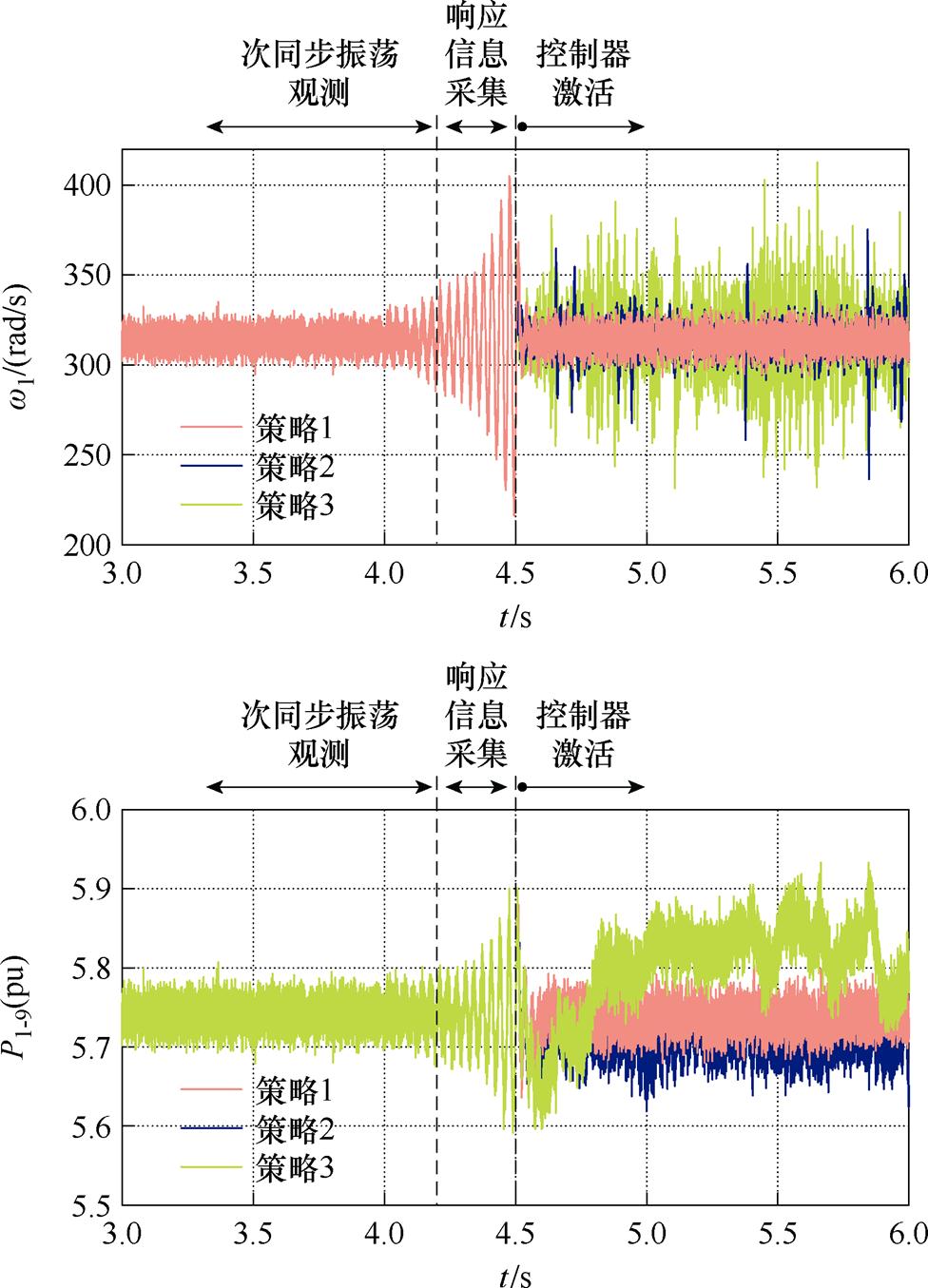
图8 [-0.05, 0.05]量测噪声下的受控系统响应曲线
Fig.8 Response curves of the controlled system under measurement noise of [-0.05, 0.05]
图7和图8的系统响应表明,策略1的闭环控制性能始终优于策略2与策略3。
当噪声较小,处于[-0.001, 0.001]之间时,三种抑制策略都能实现振荡抑制;策略1抑制振荡振幅的效果最显著,平抑时间最短,并且能够调节系统恢复至原稳定状态;策略2的振荡抑制效果介于二者中间,能够调节系统恢复至原稳定状态;策略3振荡偏差最大,平抑时间较长,并且将系统过渡到新的稳定状态,可能引入额外不确定与不稳定因素。当噪声较大,处于[-0.05, 0.05]之间时,策略1仍然保持良好的控制鲁棒性,除去量测噪声后的系统能够恢复原稳定状态;策略2未有效抑制次同步振荡,尽管系统不会发生振荡发散现象,但除去量测噪声后的系统状态与原稳定状态存在较大偏差;策略3受控系统发生大幅抖振,无论是的角频率波动,还是P1-9的功率振荡,振荡幅度均显著高于前两种抑制策略,此时系统运行状态发生不稳定的偏移,该策略无法抑制次同步振荡。
上述控制性能的差异归因如下:策略3的预测模型基于无鲁棒性增强的LTI系统模型,采用确定性等式约束;策略2则针对无鲁棒性增强的非线性系统模型构建预测模型,同样采用确定性等式约束;相比之下,策略1的预测模型在非线性系统模型基础上,通过引入松弛变量和正则化技术实现了鲁棒性增强的改进。建立在预测模型基础上的响应驱动抑制策略是否具备鲁棒性,可通过下一步的预测效果直观判断,表现为预测输出yf(k+1|k)与真实输出y(k+1)之间的偏差大小,如图9和图10所示。
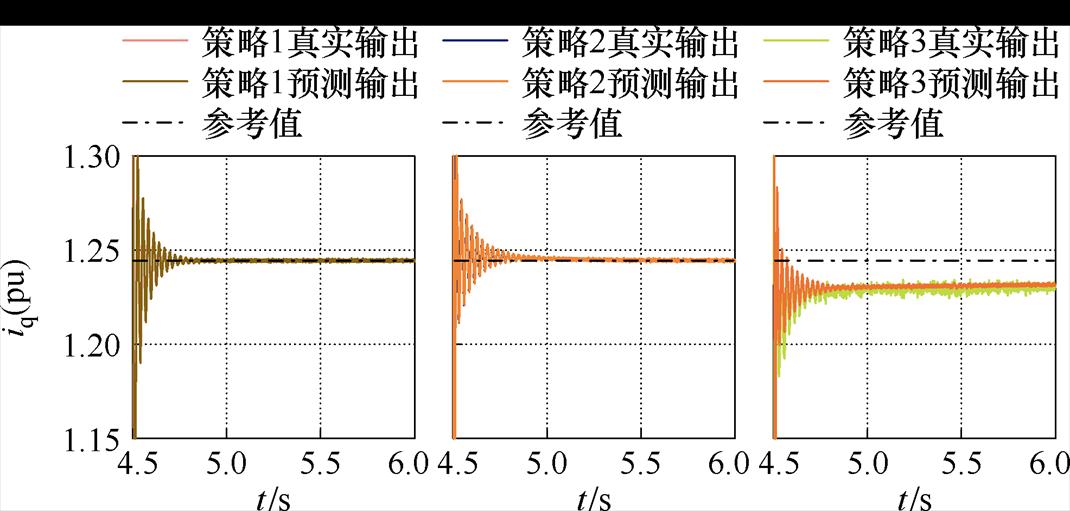
图9 [-0.001, 0.001]量测噪声下系统输出iq的预测效果
Fig.9 Prediction performance of iqunder measurement noise of [-0.001, 0.001]
结果表明,策略3对系统振荡行为的预测性能最差,预测输出、真实输出与参考值始终存在偏差;策略2介于二者中间,量测噪声较小时策略具有一定的鲁棒性、预测性能较好,量测噪声较大时噪声所致的预测模型失配问题逐渐突出;相比之下,策略1能够有效地避免噪声所致的预测模型失配,抗干扰能力强,且能准确地贴近于追踪的参考值,跟踪效果最好。
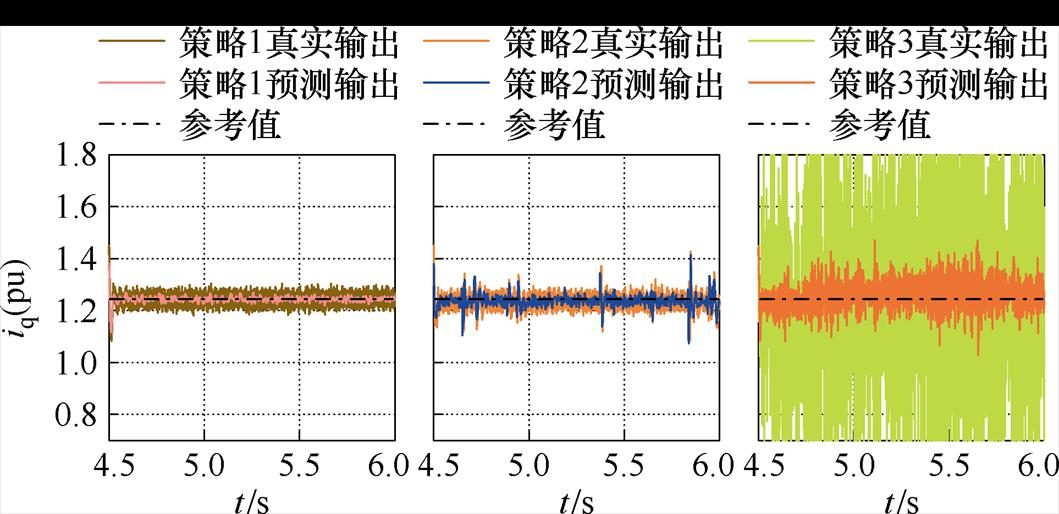
图10 [-0.05, 0.05]量测噪声下系统输出iq的预测效果
Fig.10 Prediction performance of iq under measurement noise of [-0.05, 0.05]
进一步地,量化分析不同量测噪声下次同步振荡抑制策略的预测性能与控制性能。采用方均根误差(Root Mean Square Error, RMSE)量化抑制策略中预测模型的预测偏差。选取基于时间与绝对误差乘积积分(Integral of Time multiplied by Absolute Error, ITAE)这一性能指数,以量化分析抑制策略的控制效果,表达式为
 (15)
(15)
式中,t1=4.5 s为抑制策略激活时刻;t2=6 s为仿真结束时刻;e(t)为跟踪误差,e(t)=||y(t)-yr||1。ITAE指数越小,表征控制性能越好。
不同量测噪声下三种抑制策略的预测与控制性能见表1。由表1可知:随着量测噪声干扰的不断增强,策略3的预测准确度与控制性能都显著劣化——相比于策略2的RMSE值,其由原本的1.68倍增加到20.64倍,相应的ITAE指数由原本的1.06倍增加到2.64倍,表现为预测性能的变差导致控制性能的衰退,甚至无法抑制振荡现象。而相比于策略2,策略1显著增强预测准确度与控制性能,策略1能进一步地减少28.93%~47.37%的RMSE值与5.37%~32.41%的ITAE指数,能够始终抑制振荡,调节系统恢复至原稳态。
以上分析表明,策略2的控制性能优于策略3,这源于所用预测模型是否考虑光伏并网系统的非线性,前者在Koopman观测空间中辨识了非线性系统的动态行为,更精准地描述未来行为,对控制性能有了一定的提高。在同样采用非线性系统模型的基础上,策略1的控制性能相比于策略2有了进一步的提升,表现为应对噪声干扰更强的鲁棒性,这主要源于策略1中正则化与松弛技术的引入。此外,不同于其他两种抑制策略中辨识与控制顺序进行的方式,策略1中辨识与控制同时联合开展,这种单层优化方式的全局最优性保证了更好的控制性能。
表1 不同量测噪声下三种抑制策略的预测与控制性能
Tab.1 Prediction and control performances of three suppression strategies under different measurement noises
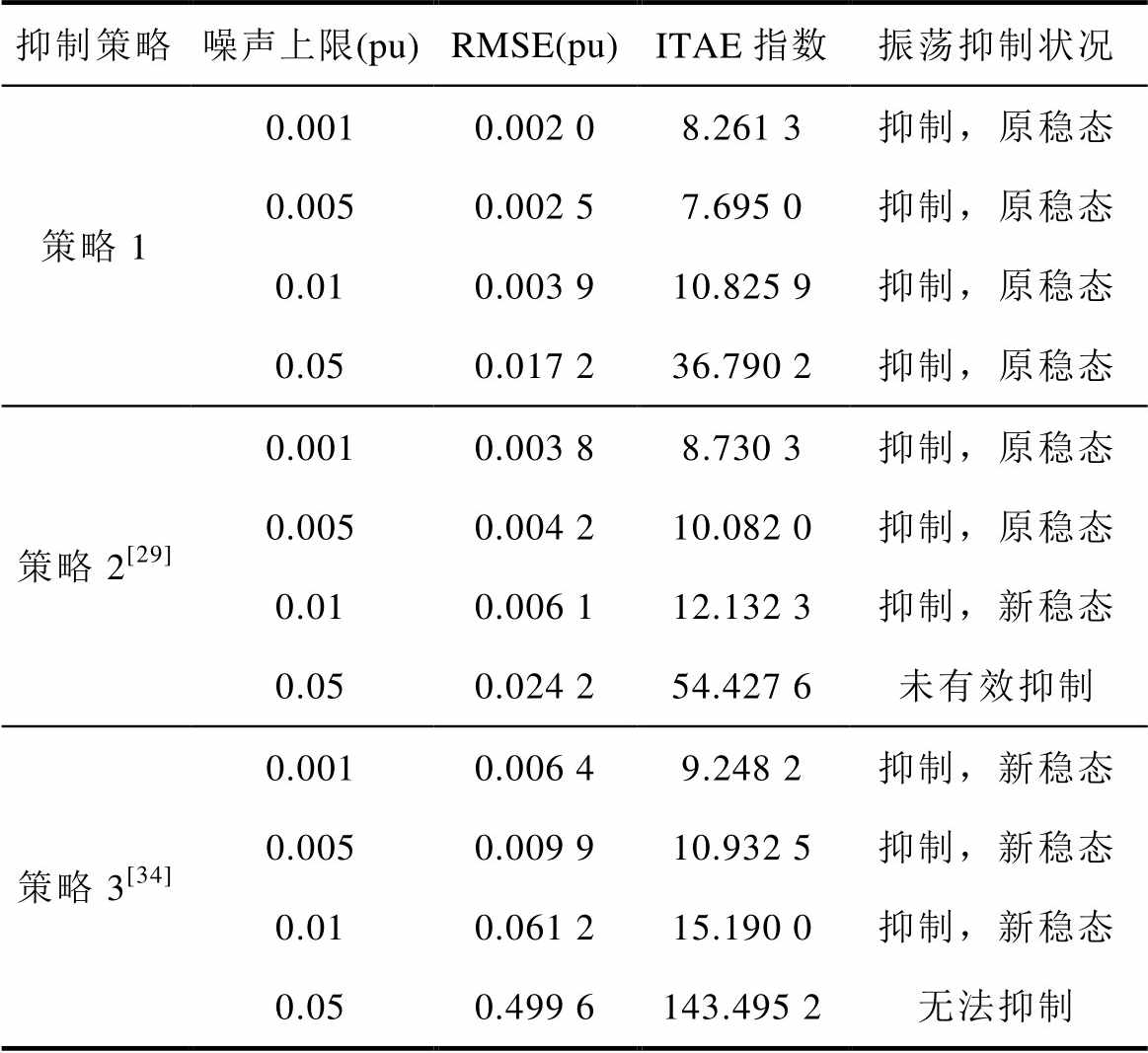
抑制策略噪声上限(pu)RMSE(pu)ITAE指数振荡抑制状况 策略10.0010.002 08.261 3抑制,原稳态 0.0050.002 57.695 0抑制,原稳态 0.010.003 910.825 9抑制,原稳态 0.050.017 236.790 2抑制,原稳态 策略2[29]0.0010.003 88.730 3抑制,原稳态 0.0050.004 210.082 0抑制,原稳态 0.010.006 112.132 3抑制,新稳态 0.050.024 254.427 6未有效抑制 策略3[34]0.0010.006 49.248 2抑制,新稳态 0.0050.009 910.932 5抑制,新稳态 0.010.061 215.190 0抑制,新稳态 0.050.499 6143.495 2无法抑制
因此,通过在Koopman观测空间中辨识非线性系统与在控制模型中引入松弛变量和正则化技术,KRDPC-SRSS不仅显著提升了预测准确度与跟踪性能,还大幅增强了抑制策略应对量测噪声的鲁棒性,具备更可靠的控制性能。
3.2.2 光伏电站锁相环参数的变化
为验证KRDPC-SRSS应对参数变化的鲁棒性,在引入大小为[-0.001, 0.001]的量测噪声基础上,设置光伏电站G1并网逆变器的不同锁相环控制参数进行比较。分为三种:增大锁相环积分系数,使得Ki_pll=3 800;减小锁相环比例系数,使得Kp_pll=17;基准锁相环PI控制参数Kp_pll=17.45,Ki_pll=3 700。相应的控制效果如图11所示。
从图11中可以看出,相比于基准场景下的响应曲线,增大锁相环积分系数Ki_pll或减小锁相环比例系数Kp_pll,均会降低次同步振荡模式阻尼(阻尼特性分析详见文献[8]),从而加剧光伏并网系统的次同步振荡。在t=4.5 s时激活光伏并网系统的KRDPC-SRSS,尽管参数变化导致了振荡模式变化,KRDPC-SRSS仍能有效抑制振幅更大且发散更快的次同步振荡,故具有应对参数变化的鲁棒性;振荡平抑时间分别为0.38 s和0.29 s,表明KRDPC-SRSS依然能够实现次同步振荡的百毫秒级快速抑制。
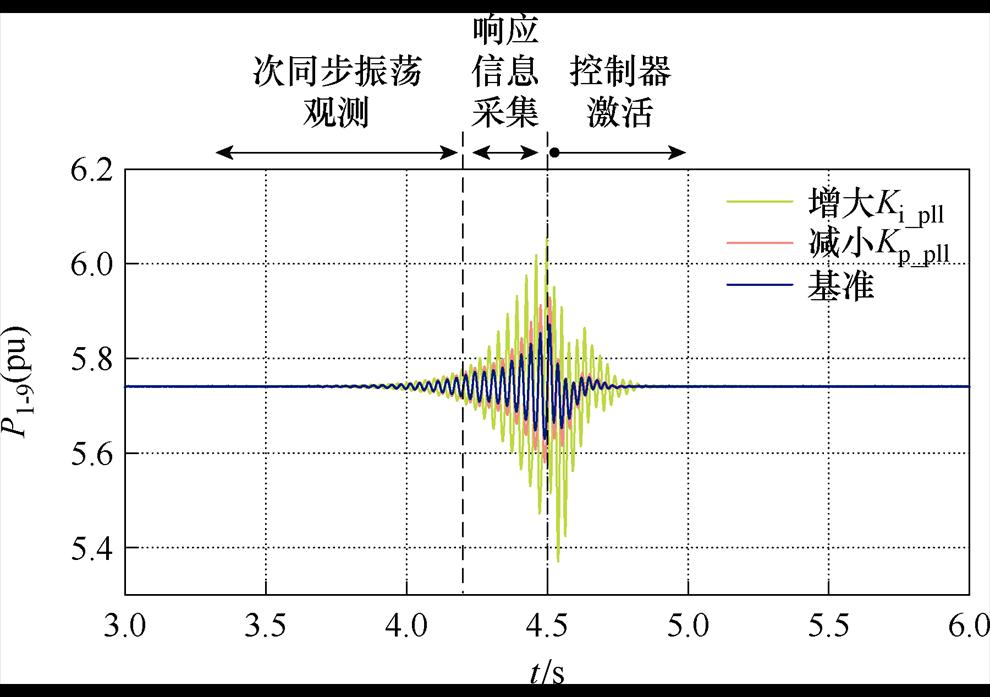
图11 不同锁相环参数下的受控系统响应曲线
Fig.11 Response curves of the controlled system under different phase-locked loop parameters
3.2.3 光伏电站光照强度的随机波动
为进一步验证KRDPC-SRSS的鲁棒性,在附加大小为[-0.001, 0.001]量测噪声的基础上,考虑气象条件中光照强度随机波动的影响[30]。初始时刻光伏电站的光照强度为800 W/m2,不同光照强度波动下KRDPC-SRSS的振荡抑制效果如图12所示。
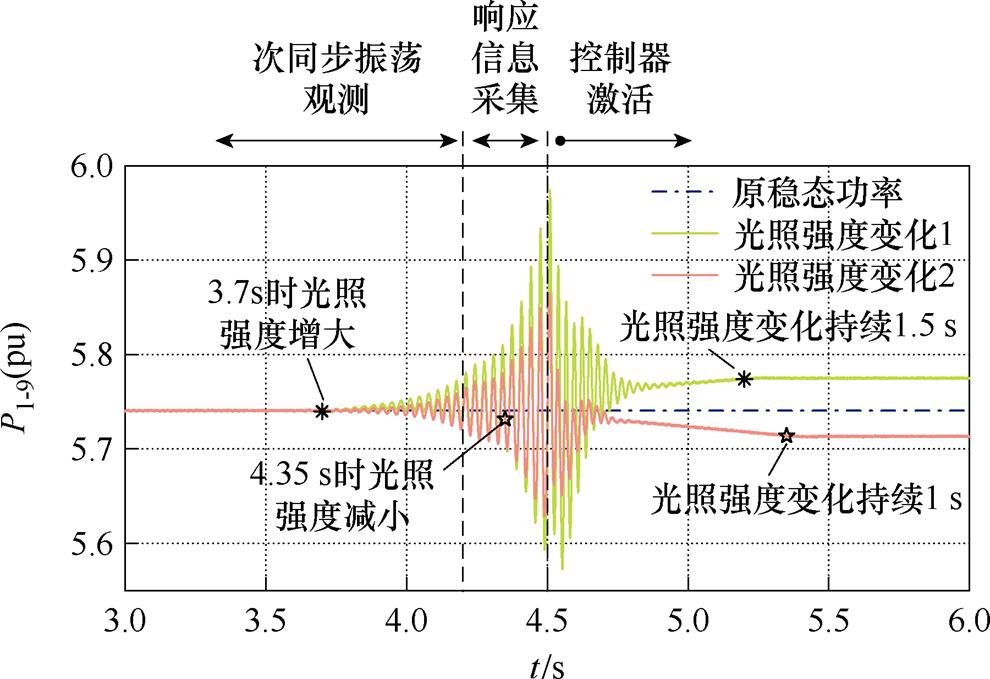
图12 不同光照强度波动下的受控系统响应曲线
Fig.12 Response curves of the controlled system under different light intensity fluctuations
图12表明,伴随着光伏强度持续1.5 s的增强或者持续1 s的减弱,光伏并网系统的次同步振荡仍然可以被KRDPC-SRSS成功抑制;并且,光照强度的增减导致区域1到区域2上联络线功率的增减,进而影响光伏并网系统的潮流分布,KRDPC- SRSS能够保证光伏并网系统在振荡衰减过程中平稳过渡到新的稳定运行状态。此外,无论光照强度变化发生于振荡抑制期间的哪个时段,KRDPC- SRSS都能保证次同步振荡抑制的有效性和鲁棒性。
3.2.4 负荷的随机波动
光伏并网系统中除了电源侧的光强波动会引发控制环境的不确定性,负荷侧的随机波动同样会影响受控系统的动态特性。在量测数据中附加[-0.001, 0.001]随机高斯噪声的基础上,分别在含光伏并网的IEEE 39节点系统的母线1或母线37处接入随机波动负荷,负荷的波动随机发生于抑制策略的振荡观测、信息采集或控制器激活的阶段中。图13展示了不同负荷随机波动下联络线1-9有功功率的响应曲线。
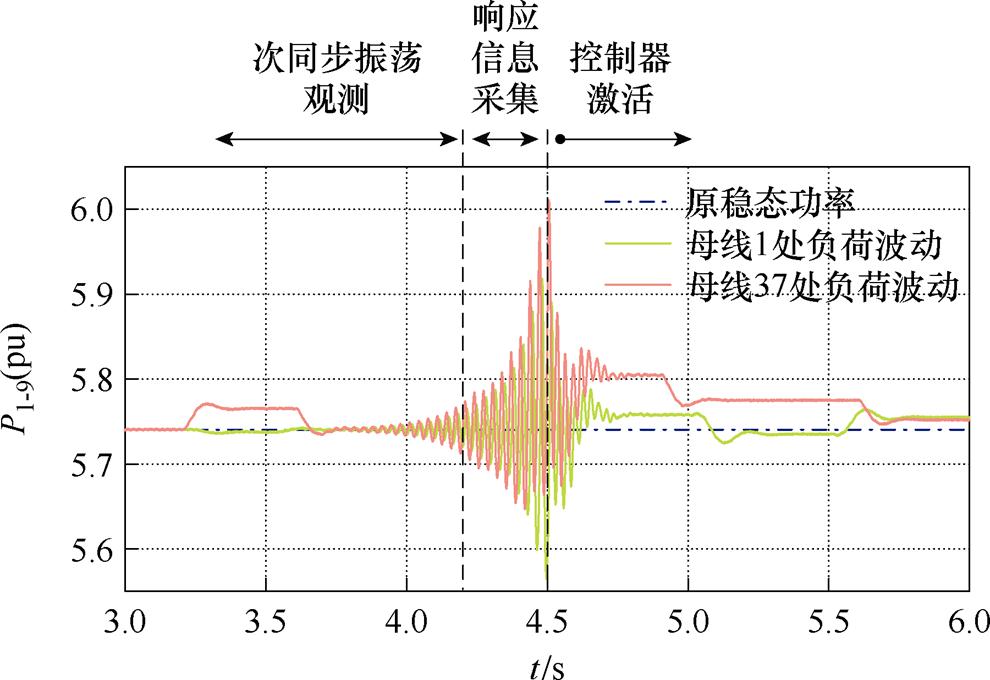
图13 不同负荷随机波动下的受控系统响应曲线
Fig.13 Response curves of the controlled system under random fluctuations of different loads
结果表明,尽管负荷随机波动导致系统潮流分布频繁变化,所辨识的运行工况发生偏移,KRDPC- SRSS仍能通过正则化与松弛技术有效抵消预测模型的失配带来的影响,并利用滚动优化实时调整控制指令,从而确保控制指令的可靠性与应对负荷随机波动的适应性。激活KRDPC-SRSS后,联络线有功功率中次同步振荡快速衰减并跟随系统潮流变化而恢复至新的稳定状态,验证了其对负荷不确定性的鲁棒抑制能力。
3.2.5 电网拓扑结构的动态变化
为进一步验证KRDPC-SRSS应对电网拓扑结构动态变化的鲁棒性,出于线路检修目的,在4.55 s计划性切除联络线3-4。原电网拓扑中,联络线3-4承担区域1向区域2输送1.24(pu)的有功功率。
图14为电网拓扑结构变化下联络线1-9有功功率的响应曲线。可以看到,未采用抑制策略的系统发生了严重的次同步振荡;而在附加KRDPC-SRSS的系统中,即使电网拓扑发生结构性改变,KRDPC- SRSS仍能通过实时响应信息更新控制指令,系统在经历短暂的振荡后又恢复到稳定状态。此外,联络线1-9的有功功率在联络线3-4切除后经历区域1外送功率的重新分配,KRDPC-SRSS确保了功率振荡快速收敛,未出现持续波动。实验结果表明,KRDPC-SRSS有效抑制次同步振荡,体现了其对电网拓扑结构动态变化的强鲁棒性。
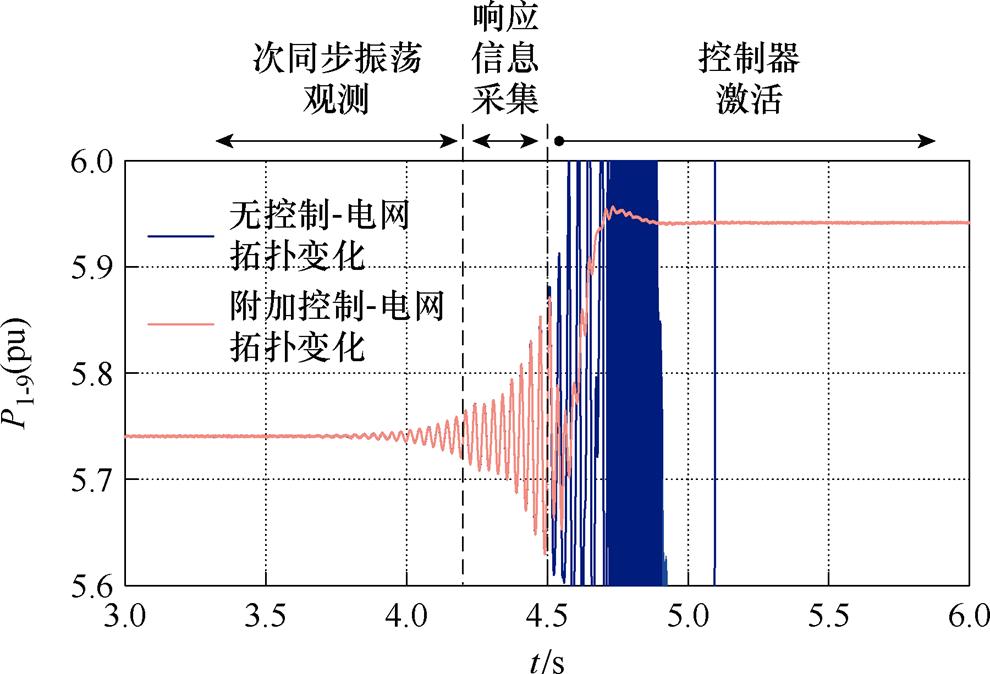
图14 电网拓扑结构变化下受控系统响应曲线
Fig.14 Response curves of the controlled system during changes in power grid topology structure
综上所述,所提KRDPC-SRSS在噪声干扰、锁相环参数变化、光强或负荷的随机波动、电网拓扑结构变化等不确定条件中始终保持可靠、优越的次同步振荡抑制性能,有效改善系统的动态稳定性,具备强鲁棒性。
为验证KRDPC-SRSS的实用性,利用实时数字仿真系统(Real Time Digital Simulator, RTDS)进行硬件在环实验。控制器采用美国国家仪器(National Instruments, NI)的Compact RIO(C-RIO)。C-RIO控制器是一款由实时控制器、FPGA模块和工业级I/O模块三部分组成的高性能嵌入式控制器。基于上述设备的硬件在环实验平台如图15所示。
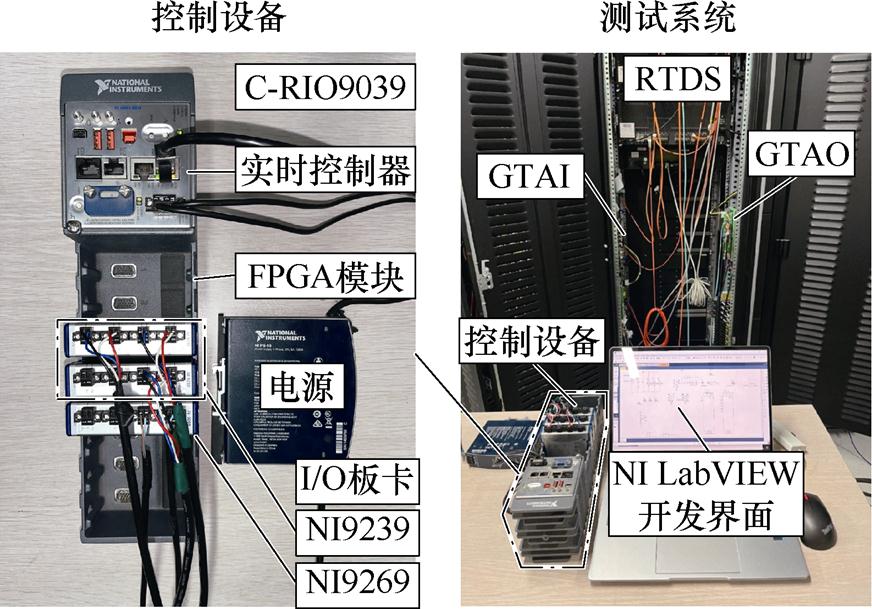
图15 受控光伏并网系统的硬件在环实验平台
Fig.15 Hardware-in-the-loop experiment platform of the controlled PV grid-connected system
在RTDS中建立含光伏并网的IEEE 39节点系统,并在C-RIO中建立KRDPC-SRSS控制器。实验过程中,RTDS中的系统模型生成模拟量信号并通过GTAO板卡输出到C-RIO中,然后通过NI 9239采样板卡进行采样,进而实时控制器求解计算控制信号,并通过NI 9269输出板卡反馈至RTDS进行实时控制。硬件在环实验与基于Matlab仿真的响应比较如图16所示。
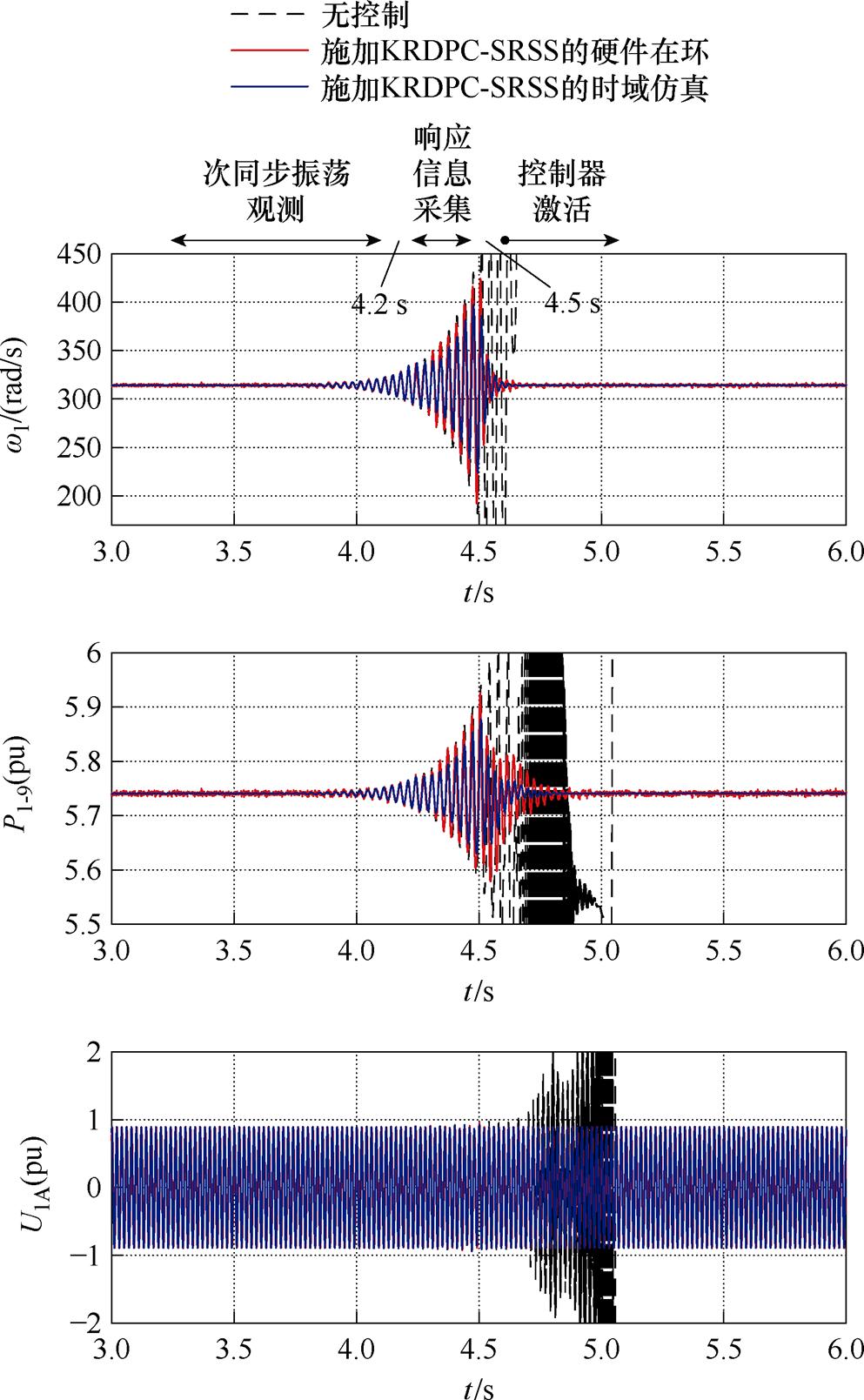
图16 硬件在环实验与基于Matlab仿真的响应比较
Fig.16 Response comparison of hardware-in-the-loop experiment and Matlab-based simulation
硬件在环的实验场景与3.1节算例场景相同,考察角频率w1、联络线有功功率P1-9和光伏电站G1并网点A相电压U1A等系统关键变量的响应。图16表明,在硬件在环实验和基于Matlab的时域仿真中,系统关键变量的响应基本相同。进一步地,通过不断缩小仿真步长以测试KRDPC-SRSS的单步控制指令所需的计算时长。结果显示,在未引入附录式(A12)解析形式的快速求解方法时,单步控制指令的平均计算时长为939 ms;而在引入快速求解方法后,单步控制指令的平均计算时长为27 ms,远小于测试系统设置的单步控制指令的控制输出间隔1 ms,符合抑制策略实时性的要求。因此,在硬件在环实验中,KRDPC-SRSS能够快速抑制次同步振荡,这意味着其具备利用响应信息实时控制的能力,验证了所提抑制策略的可行性与实用性。
本文针对光伏并网系统的次同步振荡抑制策略进行研究。主要结论如下:
1)提出了结合Koopman算符的系统行为学理论,实现了非线性系统的有限时域数据重构,建立起响应信息和复杂系统动态行为的桥梁。结果表明,所提响应驱动预测模型能够准确辨识非线性特征显著的光伏并网系统的次同步振荡行为。
2)提出了一种基于Koopman响应驱动预测控制的次同步振荡鲁棒抑制策略。该策略将系统行为的辨识、预测与控制有机融入单一的线性二次型优化中,引入正则化和松弛技术增强了应对有界干扰的控制鲁棒性,开发了最优控制律解析表达的快速求解方法,实现了响应驱动的次同步振荡鲁棒抑制。
3)基于时域仿真和硬件在环实验,在噪声干扰、锁相环参数变化、光强或负荷的随机波动、电网拓扑结构变化等不确定条件中,验证了所提抑制策略对次同步振荡抑制的有效性、鲁棒性和实用性。结果表明,相较于线性控制策略或基于确定性等式约束的控制策略,所提策略具有更精准的预测性能与更可靠、鲁棒的控制性能,可为提升光伏并网系统动态稳定性提供控制技术支撑。
附 录
1. LTI系统行为的参数化状态空间模型
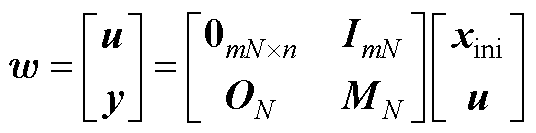
假设一段长度为N的采样轨迹 ,满足
,满足 = [u y]T,并给定系统初始状态量x(1)=xini
= [u y]T,并给定系统初始状态量x(1)=xini ,则在有限时间轴[1, N]上系统的轨迹可表示为
,则在有限时间轴[1, N]上系统的轨迹可表示为
 (A1)
(A1)
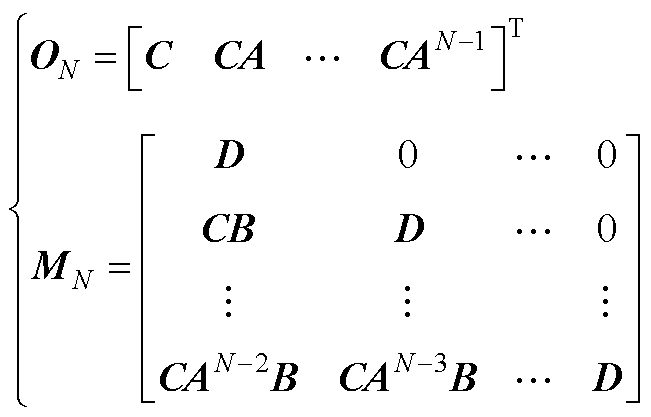
式中,ON为观测矩阵, ;MN为脉冲响应矩阵,
;MN为脉冲响应矩阵, 。ON与MN具体表示为
。ON与MN具体表示为
由式(A1)可以看出,LTI系统轨迹可以由系统的初始状态和系统输入得到,受限行为 的状态空间模型是初始状态xini、系统输入u到轨迹的映射函数;反之,对于每一条轨迹
的状态空间模型是初始状态xini、系统输入u到轨迹的映射函数;反之,对于每一条轨迹 ,都有唯一对应的xini与u。那么,结合矩阵的满秩特性,受限行为满足
,都有唯一对应的xini与u。那么,结合矩阵的满秩特性,受限行为满足
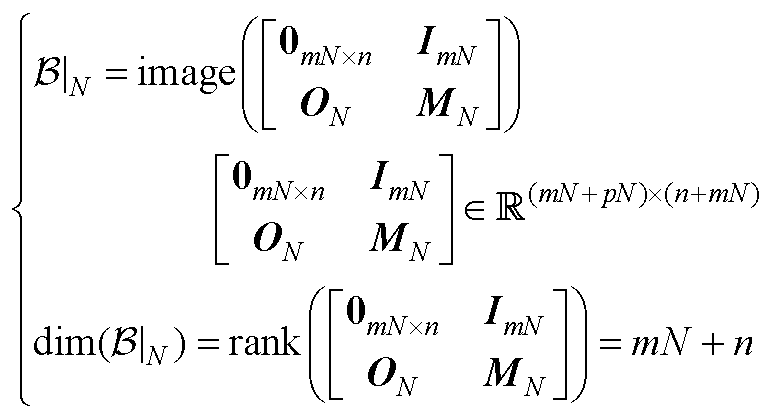 (A2)
(A2)
2. 子空间预测控制数学模型
子空间预测控制(SPC)的数学表达为
 (A3)
(A3)
式中,转移矩阵S可以结合矩阵的Frobenius范数通过最小二乘法求取,即
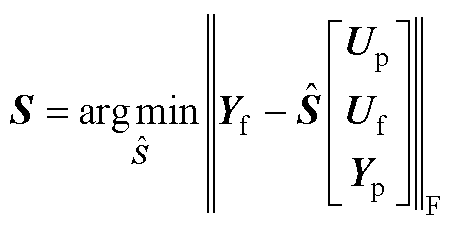 (A4)
(A4)
3. 正则化对抑制策略鲁棒性增强的证明
在引入松弛变量与L2正则化的情况下,2.2节设计了抑制策略(式(14))。忽略输入信号对输出产生的即时影响[25],即式(8)中的Dlift为零矩阵,则满足y=Clift·z。通过消除决策变量g以外的其他变量,式(14)与式(A5)等价:
 (A5)
(A5)
通过构造矩阵W与向量 ,在不计约束的情况下,可将式(A5)转化为一个正则化的回归问题:
,在不计约束的情况下,可将式(A5)转化为一个正则化的回归问题:
 (A6)
(A6)
式中,矩阵W与向量满足
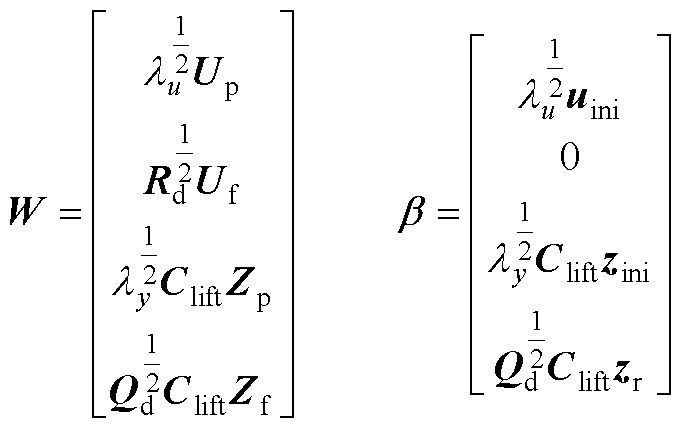
因此,若证明出回归问题式(A6)中的正则化具备应对干扰的鲁棒性,即可证明式(14)中的正则化对抑制策略鲁棒性增强的作用。
定理:已知矩阵D为作用于矩阵W、表征系统不确定性的扰动矩阵,若满足||D||F≤lg,则正则化回归问题式(A6)等价于形如式(A7)的鲁棒min-max回归问题:
 (A7)
(A7)
证明:通过三角不等式,对式(A7)内部的最大化问题进行上界分析,可得
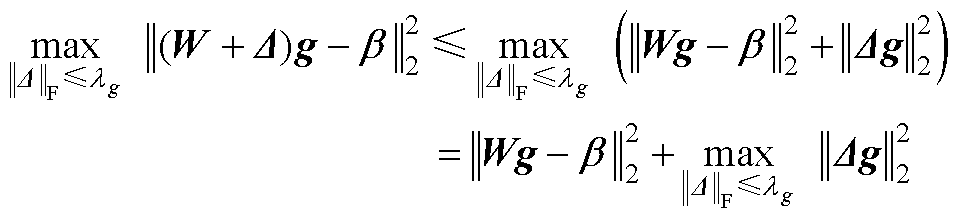
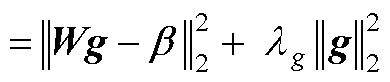 (A8)
(A8)
当且仅当扰动矩阵D满足“向量Wg 与向量Dg共线”时,不等式(A8)的等号成立。此时,扰动矩阵D可以表示为
与向量Dg共线”时,不等式(A8)的等号成立。此时,扰动矩阵D可以表示为
 (A9)
(A9)
所以,正则化回归问题式(A6)与鲁棒min-max回归问题式(A7)等价,前者同后者一样都具备应对有界干扰的鲁棒性。
综上所述,式(14)所示的正则化的二次型优化问题与式(A7)的鲁棒min-max回归问题等价,能够针对输入-输出数据中存在的有界扰动集,将最坏情况的代价降至最低,从而增强了抑制策略的鲁棒性。
4. 控制律解析表达的抑制策略快速求解方法
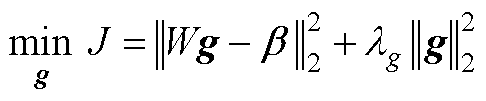
当在抑制策略中不设计输入或输出约束时,可以通过一种简洁的方式,推导出式(14)的解析解。根据式(14)与式(A6)在不计可行域约束条件下的等价性,抑制策略的目标函数可重构为
 (A10)
(A10)
考虑式(A10)是一个强凸优化问题,可以通过令目标函数的梯度为0来确定g的最优值。结合矩阵的求导法则,可推得g的最优值为
 (A11)
(A11)
将式(A11)代入到需要计算的当前时刻最优控制律 中,可得最优控制律的解析表达式为
中,可得最优控制律的解析表达式为
 (A12)
(A12)
因此,在不计及输入、输出可行域约束的条件下,所提KRDPC-SRSS抑制策略呈现出动态输出-反馈控制律的结构形式,在此结构下,反馈项的计算仅依赖于预先采集的数据。该抑制策略涉及的算法能够求得形如式(A12)的解析解,算法的复杂度有限,保证了最优控制指令的快速计算。
参考文献
[1] “十四五”可再生能源发展规划[EB/OL]. http:// zfxxgk.nea.gov.cn/1310611148_16541341407541n. pdf,2022.6.1.14th Five-Year Plan for Renewable Energy Development[EB/OL]. http://zfxxgk.nea.gov. cn/1310611148_16541341407541n.pdf,2022.6.1.
[2] 姚玉璧, 郑绍忠, 杨扬, 等. 中国太阳能资源评估及其利用效率研究进展与展望[J]. 太阳能学报, 2022, 43(10): 524-535.
Yao Yubi, Zheng Shaozhong, Yang Yang, et al. Progress and prospects on solar energy resource evaluation and utilization efficiency in China[J]. Acta Energiae Solaris Sinica, 2022, 43(10): 524-535.
[3] Cheng Yunzhi, Fan Lingling, Rose J, et al. Real-world subsynchronous oscillation events in power grids with high penetrations of inverter-based resources[J]. IEEE Transactions on Power Systems, 2023, 38(1): 316- 330.
[4] 肖湘宁, 罗超, 廖坤玉. 新能源电力系统次同步振荡问题研究综述[J]. 电工技术学报, 2017, 32(6): 85-97.
Xiao Xiangning, Luo Chao, Liao Kunyu. Review of the research on subsynchronous oscillation issues in electric power system with renewable energy sources[J]. Transactions of China Electrotechnical Society, 2017, 32(6): 85-97.
[5] 谢小荣, 刘华坤, 贺静波, 等. 电力系统新型振荡问题浅析[J]. 中国电机工程学报, 2018, 38(10): 2821-2828, 3133.
Xie Xiaorong, Liu Huakun, He Jingbo, et al. On new oscillation issues of power systems[J]. Proceedings of the CSEE, 2018, 38(10): 2821-2828, 3133.
[6] 陈露洁, 徐式蕴, 孙华东, 等. 高比例电力电子电力系统宽频带振荡研究综述[J]. 中国电机工程学报, 2021, 41(7): 2297-2310.
Chen Lujie, Xu Shiyun, Sun Huadong, et al. A survey on wide-frequency oscillation for power systems with high penetration of power electronics[J]. Proceedings of the CSEE, 2021, 41(7): 2297-2310.
[7] 马文杰, 张波, 丘东元, 等. 跟网型并网变换器的稳定域重塑控制策略研究综述[J]. 电气工程学报, 2023, 18(2): 34-51.
Ma Wenjie, Zhang Bo, Qiu Dongyuan, et al. Control strategy to reshape the stable region for grid- following converter: an overview[J]. Journal of Electrical Engineering, 2023, 18(2): 34-51.
[8] 高本锋, 邓鹏程, 梁纪峰, 等. 光伏电站与弱交流电网间次同步交互作用路径及阻尼特性分析[J]. 电工技术学报, 2023, 38(24): 6679-6694.
Gao Benfeng, Deng Pengcheng, Liang Jifeng, et al. Analysis of path and damping characteristics of subsynchronous interaction between photovoltaic plant and weak AC grid[J]. Transactions of China Electrotechnical Society, 2023, 38(24): 6679-6694.
[9] Yan Gangui, Wang Zhenyang, Zhao Yue, et al. Analysis and suppression of sub-synchronous oscillation of photovoltaic power generation based on damping torque method[J]. IEEE Transactions on Industry Applications, 2024, 60(3): 5074-5083.
[10] 张帆, 高本锋, 李铁成. 基于SVG的光伏并网SSO附加阻尼抑制策略[J]. 中国电力, 2021, 54(12): 11-19, 44.
Zhang Fan, Gao Benfeng, Li Tiecheng. SVG based supplementary damping mitigation strategy for sub- synchronous oscillation in grid-connected photo- voltaic plants[J]. Electric Power, 2021,54(12): 11-19, 44.
[11] 伍珀苇, 王子涵, 李庚银, 等. 基于模型预测控制的光伏并网系统次同步振荡抑制策略研究[J]. 太阳能学报, 2024, 45(8): 349-357.
Wu Powei, Wang Zihan, Li Gengyin, et al. Research on subsynchronous oscillation suppression strategy of photovoltaic grid-connected system based on model predictive control[J]. Acta Energiae Solaris Sinica, 2024, 45(8): 349-357.
[12] Geng Qi, Sun Huadong, Zhang Xing, et al. Mitigation of oscillations in three phase LCL-filtered grid converters based on proportional resonance and improved model predictive control[J]. IEEE Transa- ctions on Industry Applications, 2023, 59(2): 2590- 2602.
[13] Richalet J, Rault A, Testud J L, et al. Model predi- ctive heuristic control[J]. Automatica, 1978, 14(5): 413-428.
[14] 青辰, 魏震波, 刘洋, 等. 基于双时间尺度模型预测控制的灵活性资源动态调度[J]. 高压电器, 2025, 61(5): 31-40, 52.
Qing Chen, Wei Zhenbo, Liu Yang, et al. Dynamic scheduling of flexible resources based on dual-time scale model predictive control[J]. High Voltage Apparatus, 2025, 61(5): 31-40, 52.
[15] Hu Jiefeng, Shan Yinghao, Yang Yong, et al. Economic model predictive control for microgrid optimization: a review[J]. IEEE Transactions on Smart Grid, 2024, 15(1): 472-484.
[16] 陈剑, 杜文娟, 王海风. 基于对抗式迁移学习的含柔性高压直流输电的风电系统次同步振荡源定位[J]. 电工技术学报, 2021, 36(22): 4703-4715.
Chen Jian, Du Wenjuan, Wang Haifeng. Location method of subsynchronous oscillation source in wind power system with VSC-HVDC based on adversarial transfer learning[J]. Transactions of China Electro- technical Society, 2021, 36(22): 4703-4715.
[17] 甄永赞, 狄依容, 胡永强, 等. 数据驱动的风光场站次同步振荡多机协同阻尼控制方法[J]. 电工技术学报, 2024, 39(18): 5855-5867, 5898.
Zhen Yongzan, Di Yirong, Hu Yongqiang,et al. Data-driven multi-machine cooperative damping control for wind and photovoltaic plants restraining sub-synchronous oscillation[J]. Transactions of China Electrotechnical Society, 2024, 39(18): 5855-5867, 5898.
[18] Yousefian R, Kamalasadan S. Energy function inspired value priority based global wide-area control of power grid[J]. IEEE Transactions on Smart Grid, 2018, 9(2): 552-563.
[19] Surinkaew T, Emami K, Shah R, et al. Forced oscillation management in a microgrid with distri- buted converter-based resources using hierarchical deep-learning neural network[J]. Electric Power Systems Research, 2023, 222: 109479.
[20] Willems J C. From time series to linear system: Part III Approximate modelling[J]. Automatica, 1987, 23(1): 87-115.
[21] Willems J C, Rapisarda P, Markovsky I, et al. A note on persistency of excitation[J]. Systems & Control Letters, 2005, 54(4): 325-329.
[22] Koopman B O. Hamiltonian systems and transfor- mation in Hilbert space[J]. Proceedings of the National Academy of Sciences of the United States of America, 1931, 17(5): 315-318.
[23] 郑乐, 王子涵, 沈沉, 等. Koopman算符理论在新型电力系统分析与控制中的应用与挑战[J/OL]. 中国电机工程学报, 2025. http://kns.cnki.net/kcms/detail/ 11.2107.tm.20250220.1347.008.html.
Zheng L, Wang Z H, Shen C, et al. The application and challenge of Koopman operator in new-type power system[J/OL]. Proceedings of the CSEE, 2025. http://kns.cnki.net/kcms/detail/11.2107.tm.20250220.1347.008.html.
[24] 张子傲, 李岩松, 任必兴, 等. 电力系统Koopman动态等值方法[J]. 电工技术学报, 2026, 41(1): 111- 126.
Zhang Ziao, Li Yansong, Ren Bixing, et al. Dynamic equivalencing method for power systems based on Koopman theory[J]. Transactions of China Electro- technical Society, 2026, 41(1): 111-126.
[25] 刘豹, 唐万生. 现代控制理论[M]. 3版. 北京: 机械工业出版社, 2006.
[26] Rowley C W, Mezić I, Bagheri S, et al. Spectral analysis of nonlinear flows[J]. Journal of Fluid Mechanics, 2009, 641: 115-127.
[27] Tu J H, Rowley C W, Luchtenburg D M, et al. On dynamic mode decomposition: Theory and appli- cations[J]. Journal of Computational Dynamics, 2014, 1(2): 391-421.
[28] Zheng Le, Liu Xin, Xu Yanhui, et al. Data-driven estimation for a region of attraction for transient stability using the Koopman operator[J]. CSEE Journal of Power and Energy Systems, 2023, 9(4): 1405-1413.
[29] Wang Z, Huang Z, Zhang X, et al. Data-driven subsynchronous oscillation suppression for renewable energy integrated power systems based on Koopman operator[J/OL]. CSEE Journal of Power and Energy Systems, 2025. https://ieeexplore.ieee.org/abstract/ document/10838276.
[30] Lappalainen K, Valkealahti S. Output power variation of different PV array configurations during irradiance transitions caused by moving clouds[J]. Applied Energy, 2017, 190: 902-910.
[31] Coulson J, Lygeros J, Dörfler F. Data-enabled predictive control: in the shallows of the DeePC[C]// 2019 18th European Control Conference (ECC), Naples, Italy, 2019: 307-312.
[32] Sedghizadeh S, Beheshti S. Data-driven subspace predictive control: Stability and horizon tuning[J]. Journal of the Franklin Institute, 2018, 355(15): 7509-7547.
[33] 叶华, 刘玉田. 基于在线递推闭环子空间辨识的模型预测阻尼控制[J]. 中国电机工程学报, 2009, 29(28): 55-61.
Ye Hua, Liu Yutian. Model predictive damping control based on on-line recursive closed-loop subspace identification[J]. Proceedings of the CSEE, 2009, 29(28): 55-61.
[34] Al Hasnain F, Hossain S J, Kamalasadan S. A novel hybrid deterministic-stochastic recursive subspace identification for electromechanical mode estimation, classification, and control[J]. IEEE Transactions on Industry Applications, 2021, 57(5): 5476-5487.
[35] Chen Runze, Sun Hongbin, Guo Qinglai, et al. Reducing generation uncertainty by integrating CSP with wind power: an adaptive robust optimization- based analysis[J]. IEEE Transactions on Sustainable Energy, 2015, 6(2): 583-594.
[36] Tian Yingjie, Zhang Yuqi. A comprehensive survey on regularization strategies in machine learning[J]. Information Fusion, 2022, 80: 146-166.
Abstract Under the background of the development of the power system driven by the goals of “carbon peaking” and “carbon neutrality”, renewable energy sources represented by wind and photovoltaic (PV) power in China have witnessed leapfrog growth, which are gradually becoming the main primary power sources of the power system. Due to the inherent weak anti-interference ability and low damping characteristics of PVs, their adverse dynamic interactions with the power grid have significantly exacerbated the risk of subsynchronous oscillation (SSO) instability in the power system. The PV grid-connected system exhibits dynamic characteristics of high- dimensional complexity, strong nonlinearity, and significant uncertainty, rendering traditional model-based SSO suppression strategies more prone to failure. Therefore, to address this issue, this paper builds a bridge between response information and system behavior, and proposes a SSO robust suppression strategy for PV grid- connected systems via Koopman-based response-driven predictive control.
Firstly, the system is reconstructed using finite time-domain data based on behavioral system theory, and then the dynamic behavior of nonlinear systems is accurately identified in the Koopman linearized observable space. Secondly, the identification, prediction, and control of system behavior are integrated into an optimal control strategy design, and regularization and relaxation techniques are introduced to enhance control robustness. Subsequently, online SSO suppression is accomplished through rolling optimization. Thirdly, theoretical analysis reveals the robustness enhancement mechanism of regularization and relaxation techniques in the suppression strategy, and a fast solution method for this strategy is developed based on the analytical expression of the optimal control law. Finally, through time-domain simulations and hardware-in-the-loop (HIL) experiments, the effectiveness, robustness, and practicability of the SSO suppression strategy are verified in uncertain conditions such as noise interference, parameter variations, source/load fluctuations, and power grid topology changes.
The main conclusions of this paper are summarized as follows:
(1) A behavioral system theory combined with the Koopman operator is proposed to realize finite-time domain data reconstruction of nonlinear systems, establishing a bridge between response information and the dynamic behavior of complex systems. Simulation results show that the proposed response-driven prediction model accurately identifies the SSO behavior of PV grid-connected systems with significant nonlinear characteristics.
(2) A Koopman response-driven predictive control framework for SSO suppression is constructed, organically integrating system behavior identification, prediction, and control into a linear quadratic optimization problem. This integration enables online multi-step receding horizon optimization, which effectively addresses bounded disturbances and suppresses SSOs.
(3) Based on Matlab time-domain simulations and HIL experiments, the effectiveness, robustness, and practicality of the proposed suppression strategy are verified in different uncertain conditions. Case studies indicate that compared to linear control strategies or those based on deterministic equality constraints, the proposed response-driven suppression strategy yields more accurate predictions, providing technical control support to enhance the dynamic stability of PV grid-connected systems.
Keywords:Subsynchronous oscillation (SSO), response-driven predictive control, nonlinearity, Koopman operator, robustness
中图分类号:TM712
DOI: 10.19595/j.cnki.1000-6753.tces.250156
国家重点研发计划项目“响应驱动的大电网稳定性智能增强分析与控制技术”(2021YFB2400800)、金风科技项目“构网型与随网型控制的交互影响机理”(10012000176124082701)资助。
收稿日期 2025-01-22
改稿日期 2025-02-21
王子涵 男,1996年生,博士研究生,研究方向为数据驱动的新能源电力系统动态分析与稳定控制。
E-mail: wangzh@ncepu.edu.cn
李庚银 男,1964年生,教授,博士生导师,研究方向为新能源电力系统分析与控制、先进输电技术、电能质量、电力经济等。
E-mail: ligy@ncepu.edu.cn(通信作者)
(编辑 郭丽军)