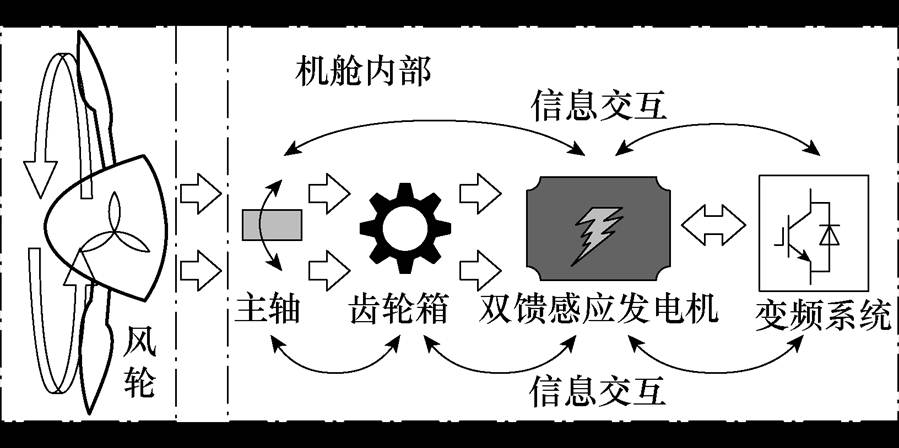
图1 风机运行原理
Fig.1 Operating principle of wind turbine
摘要 风电机组双馈感应发电机(DFIG)因受运行条件和耦合机制产生的潜变量影响,难以准确、及时地从温度信号中发现因不同故障导致的早期异常。为此,该文引入有监督多元统计过程控制(MSPC)技术,提出一种基于动态核潜变量回归(DKLVR)的DFIG故障检测新方法。首先,使用信息论技术分析影响DFIG整体温度特征的主要外部因素,确定模型输入。其次,针对潜变量回归(LVR)模型难以适应风电系统动态、非线性特征的问题,构建DKLVR模型以增强模型鲁棒性和捕捉潜在变量的能力,同时结合特征向量选择(FVS)方法,改善因高维映射引起的计算耗时问题。最后,对消除潜变量影响后的DFIG温度特征残差子空间,结合主成分分析(PCA)构建整体统计量,用于检测多种DFIG故障并定位故障位置。该文使用三种不同故障案例和多种关键性能指标进行验证,结果表明,所提方法在保持较低误报率和较高准确率的同时,能够及时发现因故障引发的早期异常。
关键词:双馈感应发电机 故障检测 多元统计过程控制 动态核潜变量回归 潜变量
风力发电作为一种清洁且成熟的发电方式,已经在能源领域得到了广泛的应用与推广。据统计,2024年全球风力发电机(Wind Turbine, WT)装机容量达到117 GW[1]。其中,双馈式风力发电机作为主流机型已广泛部署于陆上和海上风电场,并占据较大比重。在大量风机投入运行的同时,也使得故障率日益增加。双馈感应发电机(Doubly-Fed Induction Generator, DFIG)作为整个系统的能量转换中心,较高的故障停机时间占比和高昂的造价,使得及时并准确地检测到DFIG故障变得尤为重要[2-3]。
在目前关于风电系统DFIG的故障检测领域中,众多专家学者已基于不同的信号开展了相关的技术研究,并取得了一定的成果。文献[4-6]分别基于电气、振动信号实现了对感应电机轴承、绕组等故障的早期检测与诊段。但这类高采样精度信号需额外部署传感器,不利于经济性。而机组基本配置的监控控制与数据采集系统(Supervisory Control and Data Acquisition, SCADA)所采集的数据,因常年的运行,积累了大量的历史数据,这使得基于SCADA数据并结合数据驱动技术的故障检测方法逐渐成为领域内的研究重点之一[7-9]。
在基于SCADA数据进行针对DFIG故障检测的研究中,绝大多数方法为构建预测DFIG温度的正常行为模型(Normal Behavior Modeling, NBM),文献[10]采用卷积神经网络和结合注意机制的双向门控循环单元构建DFIG的NBM,来预测绕组温度,并根据输出残差来检测绕组异常。文献[11]使用长短期记忆网络预测轴承温度,并使用残差绝对值预警DFIG故障。文献[12]考虑了轴承温度的多时间尺度信息,并采用Informer模型对该特征进行预测,同样根据残差来检测轴承故障。文献[13]则采用无监督学习网络堆叠自编码器(Stacked Autoencoder, SAE)输出的多个温度特征重构误差来监测发电机状态。上述基于先进的网络模型构建的NBM,虽然具有较高的预测精度,但却容易造成过拟合现象。构建的模型也大多为“黑盒模型”,结构复杂、计算耗时且物理解释性较差,预测目标往往也为单一故障所对应的组件温度特征,而对DFIG整体温度特征构建一个综合的监测指标,显然更有利于对多种故障的检测。文献[14]提出一种基于马氏距离的故障检测方法,构建发电机正常马氏空间,通过对比在线温度信号与正常空间的马氏距离来判别DFIG状态。虽然该方法有效避免了传统NBM的不足,但方法依赖对协方差矩阵,导致面对高维数据或异常值时容易出现矩阵无法求逆的现象。
针对上述问题,多元统计过程控制(Multivariate Statistical Process Control, MSPC)技术则提供了很好的解决方案。MSPC作为一种基于统计学原理的状态监测技术,具有计算稳定高效、模型清晰、可对多维数据进行统一监控等特点[15]。其中,主成分分析(Principal Component Analysis, PCA)及其变体,已经成功应用于风机的故障检测中[16],但无监督的形式将无法计及外部因素对DFIG带来的影响,而这些影响会导致温度特征呈现非平稳状态,不利于监测。文献[17]则采用广义加性模型消除协变量(风速、转速、功率、环境温度)对风机温度的影响,改善数据非平稳性,结合MSPC技术中的Hotelling's T2统计量来监测风机状态,但该方法面向整体风机,使得对影响DFIG温度的外部因素还有待讨论,且广义加性模型受其加性结构的限制,难以对复杂机制进行拓展。
从机理角度分析,风机在输出功率的同时,机械能和电能产生的损耗,会导致设备温度的变化[18],这使得温度信号将受到协变量的影响[17]。但风电机组作为一种各子部件高度耦合的复杂系统,导致DIFG状态将不可避免地受到联动子部件的影响,且这些影响以不能直接观测的形式存在,即潜变量形式。而有监督的MSPC技术中的潜变量回归(Latent Variable Regression, LVR)模型则能够提取两组多变量之间的潜在影响[19]。该方法通过最小化变量投影误差的方法,来计算输入输出之间的潜变量,且具有较强的可扩展性。相较于PCA,LVR能够建立设备与系统之间的联系,使监测更具备针对性。此类有监督MSPC技术虽已广泛应用于化工过程监控,但却极少应用于基于SCADA数据的WT状态监测中。此外,受复杂工况的影响,使得风机运行过程具有动态非线性的特点,这也极大考验了检测时的鲁棒性[16],因此,消除上述影响,将有助于从DFIG温度信号中稳健且敏锐地发觉因故障导致的异常。但当前关于LVR的动态非线性的拓展中,多为独立研究,还未有同时考虑两种特性的解决方案[20-21]。且单纯使用核函数进行非线性映射会导致样本维数剧增,且计算复杂,不利于在线部署。
基于上述存在的问题,本文考虑潜变量影响,提出了一种基于动态核潜变量回归(Dynamic Kernel Latent Variable Regression, DKLVR)的DFIG故障在线检测方法。该方法能够在动态非线性的背景下,充分消除系统潜变量对DFIG温度信号的影响,并开发了监测指标,用于对DFIG进行多种故障的检测和定位。本文使用DFIG轴承、绕组、集电环三种典型故障案例进行分析,验证了所提方法的有效性和先进性。本文的主要贡献如下:
(1)使用信息度量技术,对影响风机内部信息交互的情况进行分析,并引入潜变量回归模型获取DFIG与系统间的潜在关系。
(2)开发DKLVR模型,该模型对LVR进行时滞数据扩展以描述风机的动态特性,采用核函数进行高维映射,来应对非线性问题,并结合特征向量选择(Feature Vector Selection, FVS)方法提升计算效率。继而对发电机温度中因运行条件和耦合机制产生的潜变量进行提取,并利用回归关系消除。
(3)对消除潜变量影响后的DFIG温度残差子空间,结合PCA开发监测统计量,实现对DFIG的不同类型故障进行综合在线检测,并根据方差贡献度定位故障位置。
风机运行原理如图1所示,当风速达到一定程度,会带动叶片转动,主轴通过连接风轮与齿轮箱,将风能转换为机械能,然后经齿轮箱增速带动发电机运转,从而实现发电,同时通过变频系统对发电机运行进行控制,以保持发电机的高效运行。可以发现,与发电机耦合运行的部件主要有齿轮箱、主轴和变频系统,这些子设备之间的能量传输会产生大量的信息交互,尤其对于温度信号。
图1 风机运行原理
Fig.1 Operating principle of wind turbine
本文采用内蒙古某风电场的SCADA数据进行研究,该风场发电机类型为1.5 MW DFIG。数据采样间隔为10 min,记录2018~2022五年内50台风机的风速、功率、转速,以及主轴、齿轮箱、发电机等内部设备的温度信息共计36个特征。本节选取20号风机,2022年记录的SCADA数据进行分析,经查阅该风机在该年无故障记录。为了对发电机故障实现全面检测,将表1所示的与发电机相关的温度信号,构成监测矩阵 。对于剩余的变量,采用互信息(Mutual Information, MI)技术分别计算与Y的综合MI系数。MI技术是信息论中用于度量两个变量之间信息依赖程度的方法,MI系数在{0, 1}之间,其中系数为0时表示变量之间相互独立,越趋近于1表示交互的信息量越大,继而反映耦合程度[22]。计算结果在表1展示(风向、油压等变量系数均小于0.2,故不做展示)。从表1可知,与发电机温度存在较高互信息的变量均为耦合部件的温度,说明Y主要受这些变量信息的影响,且该影响无法通过传感器直接测量获得,但可通过观测变量进行间接反映,符合工程领域对潜变量的定义。因此,将耦合部件温度作为主要影响DFIG温度的外部因素,组成观测矩阵
。对于剩余的变量,采用互信息(Mutual Information, MI)技术分别计算与Y的综合MI系数。MI技术是信息论中用于度量两个变量之间信息依赖程度的方法,MI系数在{0, 1}之间,其中系数为0时表示变量之间相互独立,越趋近于1表示交互的信息量越大,继而反映耦合程度[22]。计算结果在表1展示(风向、油压等变量系数均小于0.2,故不做展示)。从表1可知,与发电机温度存在较高互信息的变量均为耦合部件的温度,说明Y主要受这些变量信息的影响,且该影响无法通过传感器直接测量获得,但可通过观测变量进行间接反映,符合工程领域对潜变量的定义。因此,将耦合部件温度作为主要影响DFIG温度的外部因素,组成观测矩阵 ,进一步地,通过本文方法来获取X与Y之间的潜变量。
,进一步地,通过本文方法来获取X与Y之间的潜变量。
表1 系统变量和发电机温度的MI系数
Tab.1 Mutual information coefficient between system variables and generator temperature
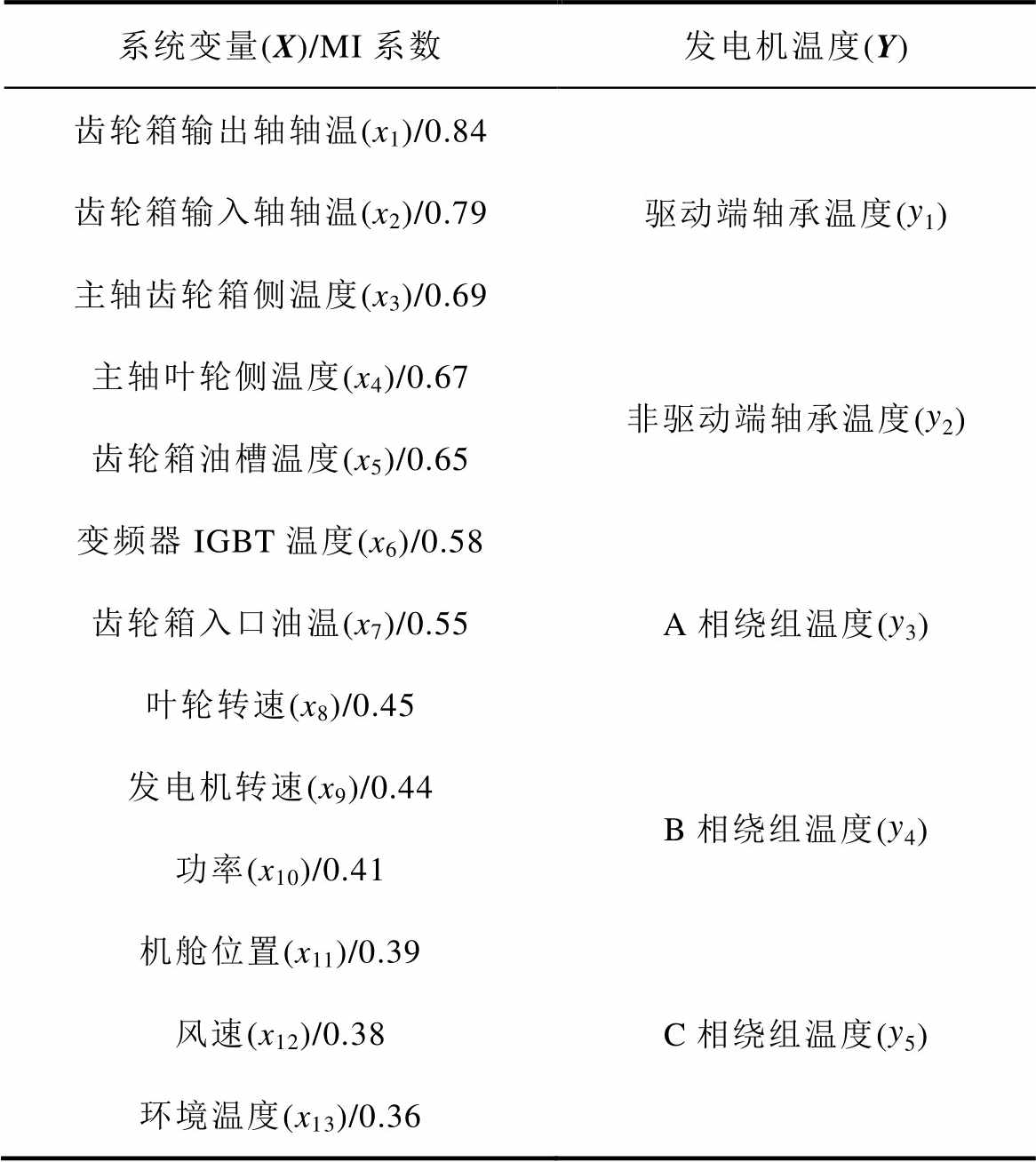
系统变量(X)/MI系数发电机温度(Y) 齿轮箱输出轴轴温(x1)/0.84 齿轮箱输入轴轴温(x2)/0.79驱动端轴承温度(y1) 主轴齿轮箱侧温度(x3)/0.69 主轴叶轮侧温度(x4)/0.67非驱动端轴承温度(y2) 齿轮箱油槽温度(x5)/0.65 变频器IGBT温度(x6)/0.58 齿轮箱入口油温(x7)/0.55A相绕组温度(y3) 叶轮转速(x8)/0.45 发电机转速(x9)/0.44B相绕组温度(y4) 功率(x10)/0.41 机舱位置(x11)/0.39 风速(x12)/0.38C相绕组温度(y5) 环境温度(x13)/0.36
本节将具体阐述所提出的故障检测方法,为便于读者理解,将首先简述和讨论基于潜变量回归模型的故障检测原理与应用,然后再针对动态非线性做相应拓展,最后提出基于DKLVR模型的DFIG在线故障检测方法。
LVR是一种新型的有监督MSPC技术[19],关于传统LVR模型的故障检测原理如图2所示。假设有输入数据 和目标数据
和目标数据 ,其中n为样本数量,b和m分别为对应数据的特征数量。与经典的偏最小二乘法(Partial Least Square, PLS)和典型变量相关性分析(Canonical Correlation Analysis, CCA)相似,LVR也通过线性投影将高维数据映射到低维空间,来提取X和Y中的主要交互信息,即潜变量,数学公式可表示为
,其中n为样本数量,b和m分别为对应数据的特征数量。与经典的偏最小二乘法(Partial Least Square, PLS)和典型变量相关性分析(Canonical Correlation Analysis, CCA)相似,LVR也通过线性投影将高维数据映射到低维空间,来提取X和Y中的主要交互信息,即潜变量,数学公式可表示为 ,
, ,
, 。其中,
。其中, 和
和 为潜变量,
为潜变量, 和
和 分别对应的权重向量构成的权重矩阵为W和Q,l为提取的潜变量数。但不同于前两者的是,LVR模型通过最小化潜变量之间的误差,来选取潜变量和权重向量,其目标函数表示为
分别对应的权重向量构成的权重矩阵为W和Q,l为提取的潜变量数。但不同于前两者的是,LVR模型通过最小化潜变量之间的误差,来选取潜变量和权重向量,其目标函数表示为
 (1)
(1)
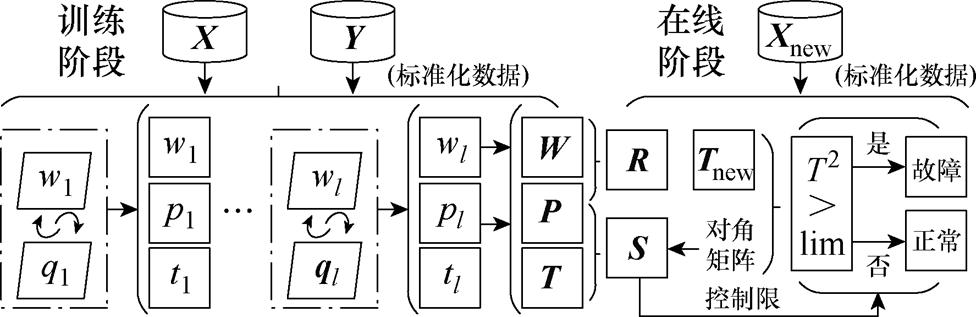
图2 传统LVR故障检测原理
Fig.2 Principle of fault detection using traditional LVR
由于其内外部模型一致的特性,在提取权重向量的过程中可以避免噪声的影响,几何属性的分析和实验对比也证明,LVR模型能够最大化潜在空间上u的投影,在关注X与Y的相关性的同时,也考虑了Y方差结构,这使得LVR拥有比PLS和CCA更好的监测性能[21]。为避免共线性问题引起的模型病态,引入正则化项,式(1)可等价为
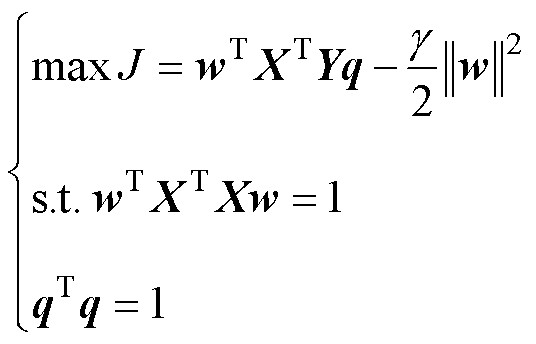 (2)
(2)
式中, 为正则化参数。g和l均由离线阶段交叉验证获得。通过特征分解法和非线性迭代算法求解后,可以将X与Y分解为
为正则化参数。g和l均由离线阶段交叉验证获得。通过特征分解法和非线性迭代算法求解后,可以将X与Y分解为
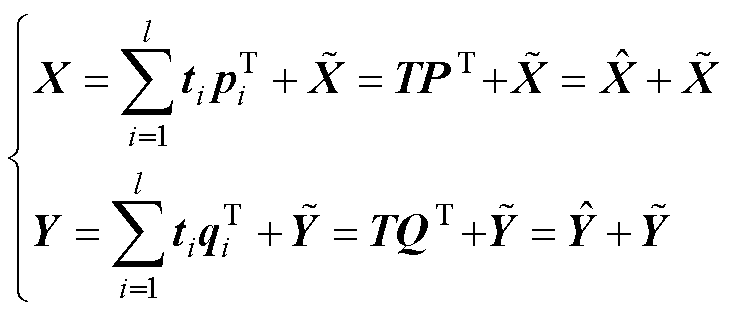 (3)
(3)
式中,T为潜变量构成的矩阵, ,且
,且 ,R为反映X与潜变量关系的矩阵,在离线阶段获得,
,R为反映X与潜变量关系的矩阵,在离线阶段获得, ,在线阶段便可通过该矩阵直接计算潜变量T;P和Q为加载矩阵,分别表示T对X与Y的回归关系;
,在线阶段便可通过该矩阵直接计算潜变量T;P和Q为加载矩阵,分别表示T对X与Y的回归关系; 、
、 为被分解出的主空间,分别包含了X中关于Y及Y中关于X的信息;
为被分解出的主空间,分别包含了X中关于Y及Y中关于X的信息; 为X消除Y影响后的残差子空间(Residual Subspace, RS)[23],相对地,
为X消除Y影响后的残差子空间(Residual Subspace, RS)[23],相对地, 为Y消除了X影响后的残差空间。传统的MSPC经常用于化工过程的故障检测,因包含了过程数据中的质量信息,通常构建T2统计量监控,这使得对Y的开发相对较少。而在DFIG故障检测的角度分析,便为发电机关键特征消除外部因素产生的潜变量影响后的平稳信号。此外,传统的LVR检测原理假设系统是线性关系,而风电系统却具有动态非线性的特点。因此,该方法在DFIG故障检测中的应用,还需进行动态非线性的拓展。
为Y消除了X影响后的残差空间。传统的MSPC经常用于化工过程的故障检测,因包含了过程数据中的质量信息,通常构建T2统计量监控,这使得对Y的开发相对较少。而在DFIG故障检测的角度分析,便为发电机关键特征消除外部因素产生的潜变量影响后的平稳信号。此外,传统的LVR检测原理假设系统是线性关系,而风电系统却具有动态非线性的特点。因此,该方法在DFIG故障检测中的应用,还需进行动态非线性的拓展。
图3所示为本文所构建的DKLVR模型,在对LVR进行动态拓展的研究中,文献[20]提出了使用滞后X的加权表示来捕捉X和Y之间的动态关系,并相应地拓展模型结构。这样的方法虽然可以给出变量间动态关系的明确表示,但也增加了模型复杂程度,不利于非线性的拓展。同时,本文研究重点在分解后的Y残差空间,对动态可解释性不做研究。故选取更为简便的数据扩充方法进行动态特性的延伸[8, 24]。假设在采样时间 ,标准化后的输入数据
,标准化后的输入数据 ,并且当前变量依赖过去的观测变量。因此,组合数据矩阵
,并且当前变量依赖过去的观测变量。因此,组合数据矩阵 可以用来获取变量之间的动态关系。新的动态矩阵由当前时刻的样本和s个时间点之前的样本组成,形成一个时间滞后矩阵
可以用来获取变量之间的动态关系。新的动态矩阵由当前时刻的样本和s个时间点之前的样本组成,形成一个时间滞后矩阵 来反映变量之间的动态关系,有
来反映变量之间的动态关系,有
 (4)
(4)
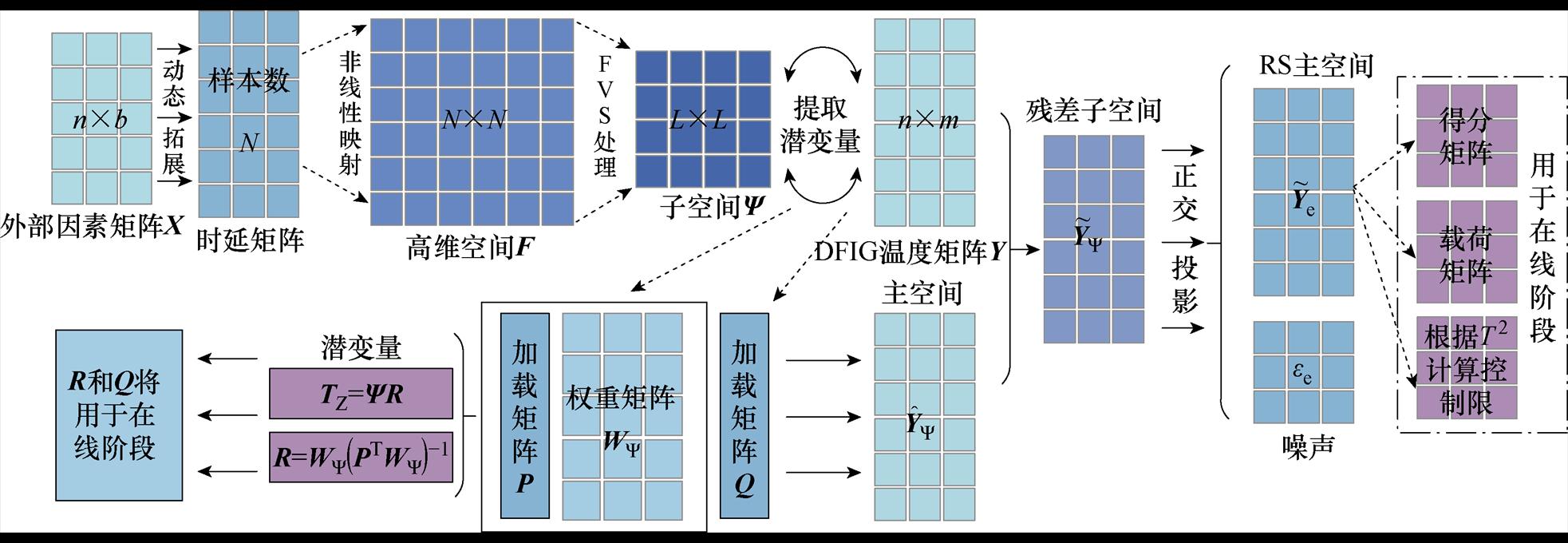
图3 DKLVR模型原理
Fig.3 Principle of DKLVR model
在对MSPC相关模型进行非线性拓展的研究中,将X经核函数由低维空间映射到高维特征空间F,使非线性数据在高维特征空间中呈线性关系的方法,已成为一种成熟的思路[23, 25]。但这将不可避免地导致X样本数急剧增加(时延矩阵样本数量为n-s+1设为N,映射后维数将变为 )。这使得后续分解和矩阵求逆计算将变得耗时,从而不利于模型的训练和在线部署。而FVS方法能够在高维特征空间选取关键数据,即特征向量,形成一组基底,从而保留数据的几何特征,且应用灵活。将经特征向量选择后的高维数据再进行动态拓展和后续工作,能够有效提升计算效率,同时还能消除冗余特征,提高检测能力[26]。
)。这使得后续分解和矩阵求逆计算将变得耗时,从而不利于模型的训练和在线部署。而FVS方法能够在高维特征空间选取关键数据,即特征向量,形成一组基底,从而保留数据的几何特征,且应用灵活。将经特征向量选择后的高维数据再进行动态拓展和后续工作,能够有效提升计算效率,同时还能消除冗余特征,提高检测能力[26]。
定义映射为 ,核函数为的内积,即
,核函数为的内积,即
 由此可得核矩阵
由此可得核矩阵
 。由于高斯核函数具有通用性强、参数控制灵活等特点,已被广泛应用于非线性映射[25]。本文选取高斯核函数进行映射,表示为
。由于高斯核函数具有通用性强、参数控制灵活等特点,已被广泛应用于非线性映射[25]。本文选取高斯核函数进行映射,表示为
 (5)
(5)
式中,c为高斯函数的宽度,决定了核函数的稳健性。稳健性随c的增加而增加,而敏感度则呈现相反趋势。为满足简化计算令映射均值为0的假设。对K进行中心化处理,有
 (6)
(6)
式中, 为中心化后的K;
为中心化后的K; 为单位矩阵;
为单位矩阵; 为全1列向量。
为全1列向量。
在进行FVS时,定义特征子空间中的特征向量数目为L, 。希望从所有可能的特征向量中选择L个最优的特征向量构成特征子空间
。希望从所有可能的特征向量中选择L个最优的特征向量构成特征子空间 ,其映射可表示为
,其映射可表示为
 (7)
(7)
获取子空间的过程为:首先,通过选定的特征向量重构原始数据点,计算重构误差并最小化该误差。然后,定义并使用局部适应度和全局适应度来衡量特征向量集合。最后,通过前向选择算法,每次选择一个新的特征向量,直到达到预设的特征数或适应度阈值,停止计算获得子空间。详细实现过程在附录中展示。在确定子空间后,数据将映射至该空间中,以点积形式计算 在中的映射时,可表示为
在中的映射时,可表示为
 (8)
(8)
令由 对应的核矩阵为
对应的核矩阵为 ,则Z便为经核映射和FVS后的数据,维数转换为
,则Z便为经核映射和FVS后的数据,维数转换为 ,将减小计算时的复杂度[27]。
,将减小计算时的复杂度[27]。
此前式(2)中的优化目标可转化为
 (9)
(9)
式中, 为Z的权重向量;Z的潜变量为
为Z的权重向量;Z的潜变量为 。至此同样经过特征分解法和非线性迭代算法求解,得到分解形式为
。至此同样经过特征分解法和非线性迭代算法求解,得到分解形式为
 (10)
(10)
式中, 为动态非线性潜变量构成的矩阵,
为动态非线性潜变量构成的矩阵,
 ,可通过
,可通过 计算,有
计算,有
 (11)
(11)
式中,R反映了潜变量与发电机温度之间的关系, ;
; ;
; 为被分解出的动态非线性主空间;
为被分解出的动态非线性主空间; 为Y中包含了X动态非线性影响的主空间;
为Y中包含了X动态非线性影响的主空间; 为RS;
为RS; 为Y通过回归关系消除了潜变量影响后的RS。本文也将根据这一性质,进一步地基于RS构建监测统计量。
为Y通过回归关系消除了潜变量影响后的RS。本文也将根据这一性质,进一步地基于RS构建监测统计量。
上述模型为离线阶段,用于获取P、Q、 。在线阶段有新的测试数据
。在线阶段有新的测试数据 、
、 时,X根据式(4)获得新的时延矩阵,然后新的核矩阵
时,X根据式(4)获得新的时延矩阵,然后新的核矩阵 中心化可计算[27]为
中心化可计算[27]为
 (12)
(12)
式中,K为训练数据的核矩阵,对于单个测试数据 ,其核变换可表示为
,其核变换可表示为 ,后经FVS转换后变为
,后经FVS转换后变为 ,新的潜变量
,新的潜变量 为
为
 (13)
(13)
此时,新的残差子空间可计算为
 (14)
(14)
Hotelling's T2统计量的主要目标是检验两个多变量均值向量之间是否存在显著差异,在系统和全局监测方面具有很强的优势[17]。本文将对残差子空间构建T2统计量。由于初步分解的RS中仍包含较大的方差,并且其虽消除了潜变量的影响,但内部变量之间仍存在相关性。所以,还需将RS进行进一步的PCA分解以去除噪声和相关性,有
 (15)
(15)
式中, 为噪声;
为噪声; 包含大部分残差信息,可计算为
包含大部分残差信息,可计算为
 (16)
(16)
式中, 和
和 分别为经PCA分解得到的得分向量和载荷矩阵。当有新样本
分别为经PCA分解得到的得分向量和载荷矩阵。当有新样本 输入时,
输入时, 的计算为
的计算为
 (17)
(17)
其中
式中,S为对角矩阵; 为测试阶段计算获得的新的残差。关于T2的控制限,则通过核密度估计法计算,置信水平为0.01,具体原理参考文献[8]。当在线检测时,新的统计量超过控制限时,可判定发电机设备发生故障。此外,风电机组大多部署在偏僻的地方,且装配复杂。而在DFIG故障发生后,能够大致判断故障位置,对于维护也具有一定的指导意义。进一步地,可结合方差贡献度的计算原理,来计算当故障发生时发电机各位置温度信号的累计贡献度。
为测试阶段计算获得的新的残差。关于T2的控制限,则通过核密度估计法计算,置信水平为0.01,具体原理参考文献[8]。当在线检测时,新的统计量超过控制限时,可判定发电机设备发生故障。此外,风电机组大多部署在偏僻的地方,且装配复杂。而在DFIG故障发生后,能够大致判断故障位置,对于维护也具有一定的指导意义。进一步地,可结合方差贡献度的计算原理,来计算当故障发生时发电机各位置温度信号的累计贡献度。
 (18)
(18)
式中, 为第j个原始变量的方差贡献度;
为第j个原始变量的方差贡献度; 为第i个主成分的第j个原始变量的系数;
为第i个主成分的第j个原始变量的系数; 为第i个主成分的特征值,代表该主成分解释的方差[16]。
为第i个主成分的特征值,代表该主成分解释的方差[16]。
综上所述,本文基于DKLVR模型的故障检测方法可总结为:
1)离线阶段
(1)基于互信息技术,确定影响DFIG整体温度特征Y的外部因素矩阵X。
(2)利用X和Y历史数据进行交叉验证训练DKLVR模型,以确定模型关键参数。根据式(4)~式(6)将X经延迟矩阵获得动态特性,并经核函数投影至高维空间F。接着根据附录式(A1)~式(A9)进行FVS处理,将动态核矩阵转换至较低维度空间。
(3)基于上述,根据式(8)~式(11),在风机动态非线性背景下,计算获得能够反映潜变量关系的矩阵R和回归关系的矩阵Q。
(4)对DFIG温度特征消除外界因素潜变量影响后的RS,结合PCA构建基于残差子空间的DFIG监测统计量,并确定控制限。
2)在线阶段
(1)根据构建的模型和方法进行在线检测,当有新数据输入时,对进行动态核拓展,根据式(12)~式(14)计算新的消除潜变量和残差子 空间。
(2)根据式(15)~式(17)计算新的监测量,当新的超出控制限时,确定DFIG发生故障。
(3)确认发生故障后,通过式(18)计算残差的贡献度确定故障变量。整个检测流程如图4所示。
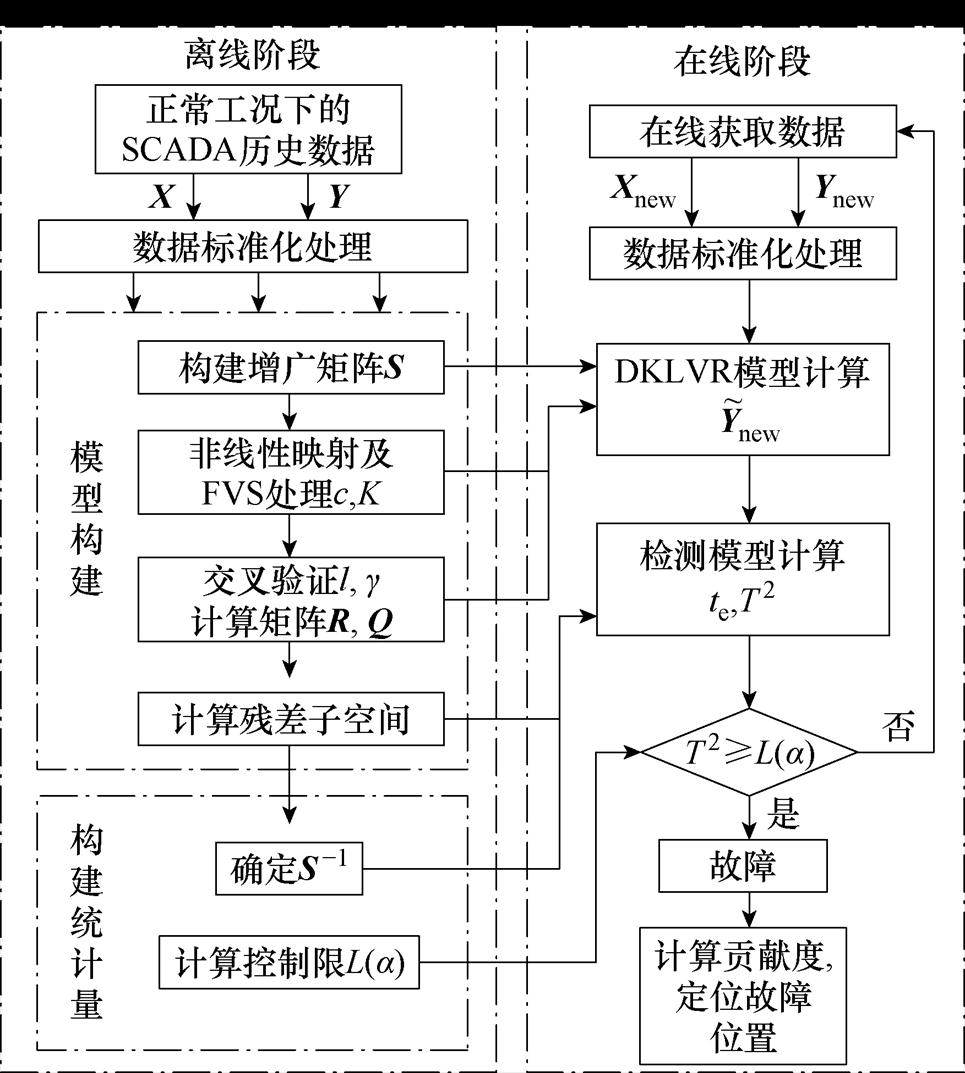
图4 DKLVR故障检测流程
Fig.4 DKLVR fault detection process
为验证本文检测方法的有效性和先进性,将采用三种DFIG常见故障案例进行分析。其中,案例1将展示LVR、DLVR、KLVR和DKLVR的检测结果,以验证方法的有效性和改进的必要性;案例2将展示三类不同设定场景下的实验结果,以验证本文场景的有效性和必要性;案例3将展示DKLVR与当前两种主流方法和DKPCA的检测结果,以验证方法的先进性。在此之前,还需对故障进行分析,并设置模型参数。
3.1.1 故障描述
本文的案例数据均从第1节所描述的风电场现场采集记录,根据该风场的统计信息显示,造成较长停机时间和较大维护成本的DFIG故障除了已被广泛研究的轴承故障外,还有定子绕组故障和转子电刷集电环故障。其余故障的停机时间和造成的损失均小于这三类故障。本文所使用的案例基本信息由表2给出,发电机温度训练数据和测试数据如图5所示,不难发现,数据整体呈现非平稳性,这将不利于发掘故障早期的微弱特征。红色虚线表示发电机各部件触发风场报警的阈值,其中轴承触发的阈值为90℃,绕组触发阈值为120℃。
表2 故障基本信息和数据集划分情况
Tab.2 Basic fault information and dataset partitioning
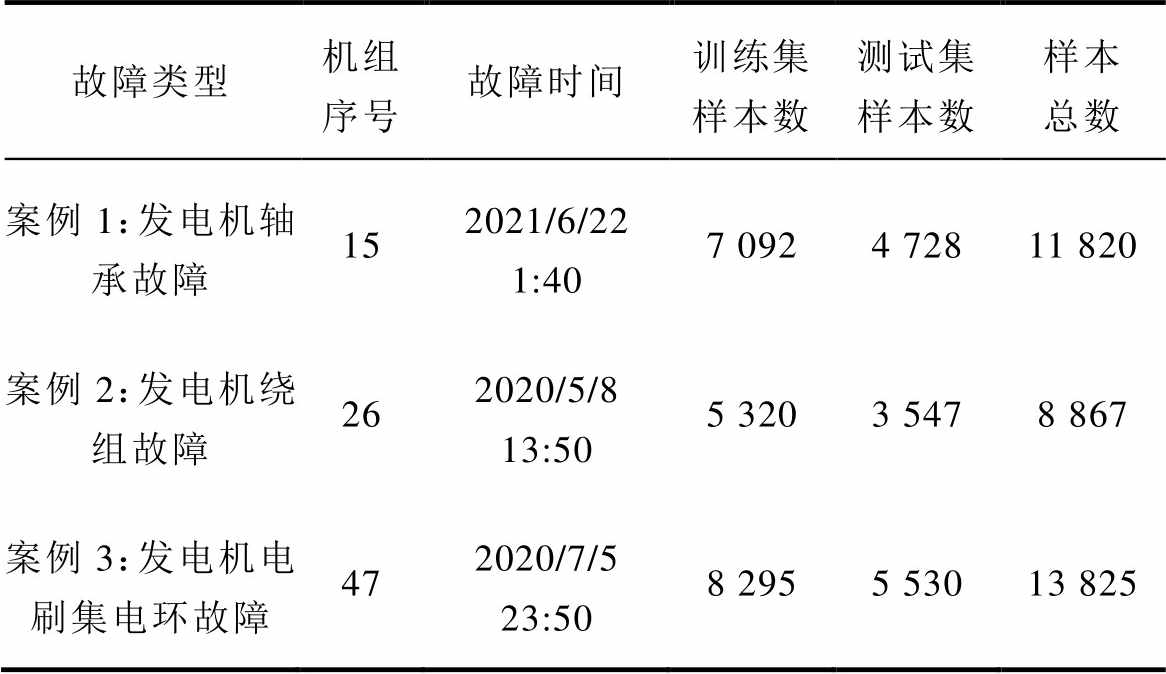
故障类型机组序号故障时间训练集样本数测试集样本数样本总数 案例1:发电机轴承故障152021/6/22 1:407 0924 72811 820 案例2:发电机绕组故障262020/5/8 13:505 3203 5478 867 案例3:发电机电刷集电环故障472020/7/5 23:508 2955 53013 825
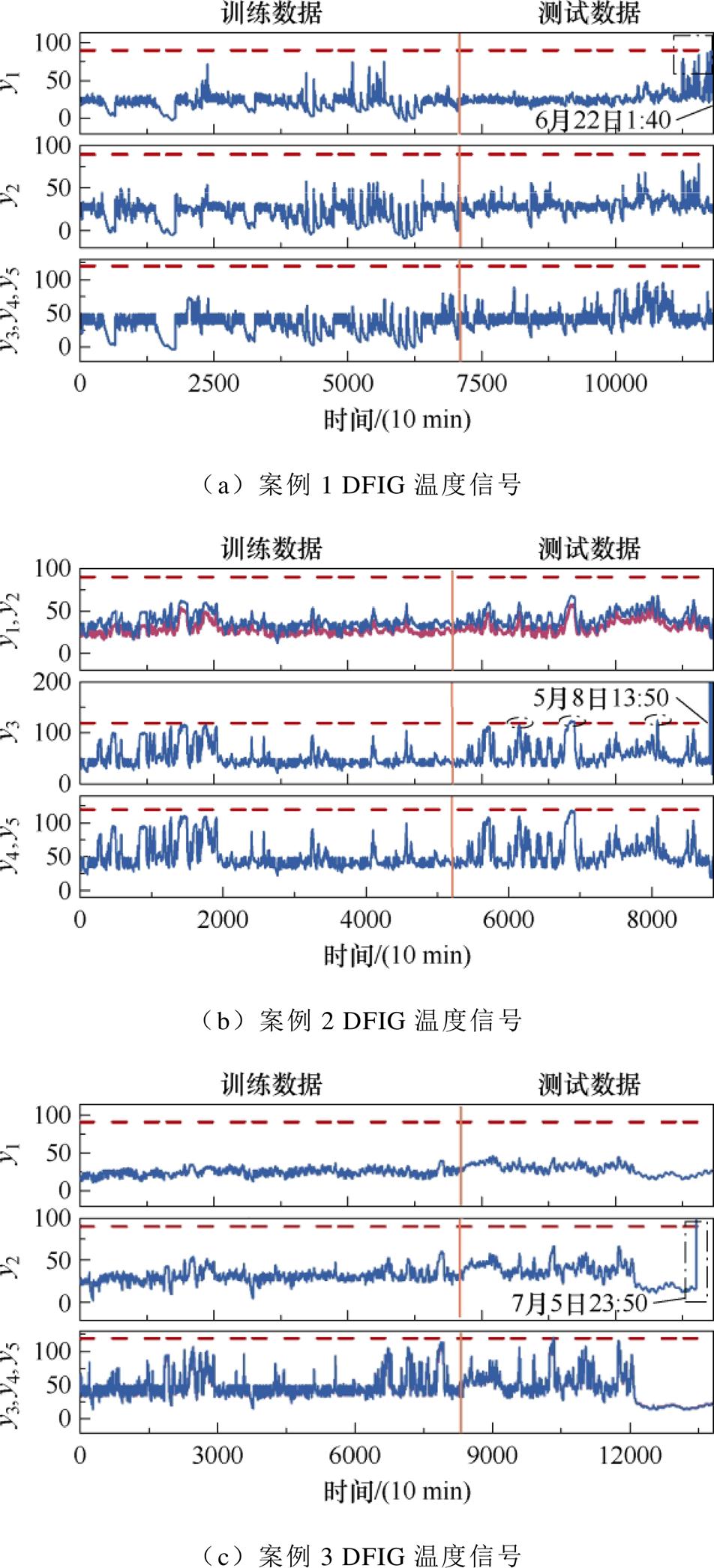
图5 本文三个案例的发电机温度信号
Fig.5 Generator temperature signals for three cases in this article
案例1发生于2021年6月22日,选取2021年4月1日至故障发生时的发电机温度数据进行分析,由图5a可知,在驱动端轴承发生故障前,便已出现异常,频频靠近临界点。案例2发生于2020年5月8日,选取2020年3月8日至故障发生时的数据进行分析,由图5b可知,在此区间内两轴承温度也均处于正常范围,而A相绕组,则在停机前便出现异常现象,且屡次逼近阈值,其余两相温度虽与A相相似,但略低于A相,可见仅观测单一特征或轴承温度,不足以对整个发电机状态进行监测。案例3发生于2020年7月5日,选取4月1日至故障发生时的数据进行分析,由图5c可以发现,绕组和驱动端轴承温度均处于正常范围,而非驱动端轴承则因与集电环相连故触发告警阈值,但发电机整体温度在此之前已出现异常。三个案例选取前60%的数据作为训练数据,后40%为测试数据。划分情况也由表2给出。
3.1.2 实验设置
根据上述划分的训练数据,来确定本文所涉及的方法的关键参数。当前基于SCADA数据的DFIG故障检测主流方法为使用神经网络构建DFIG的NBM[28],另外无监督MSPC技术也已应用于风电故障检测。因此,本文选取当前流行神经网络模型Transformer、SAE和构建DKPCA作为案例3所对照的方法。其中,两种网络模型的参数分别以最小预测误差和重构误差为参考选取。LVR、DLVR、KLVR、DKLVR、DKPCA五种MSPC模型,以最小重构误差为依据,通过经验和交叉验证确定所涉及的参数(根据经验,=0.01,动态参数s选取范围为3~10,非线性参数c∈{0.1, 1, 10, 100},潜变量数l为2~7)。经训练,模型参数见表3。
表3 实验模型参数
Tab.3 Experimental model parameters
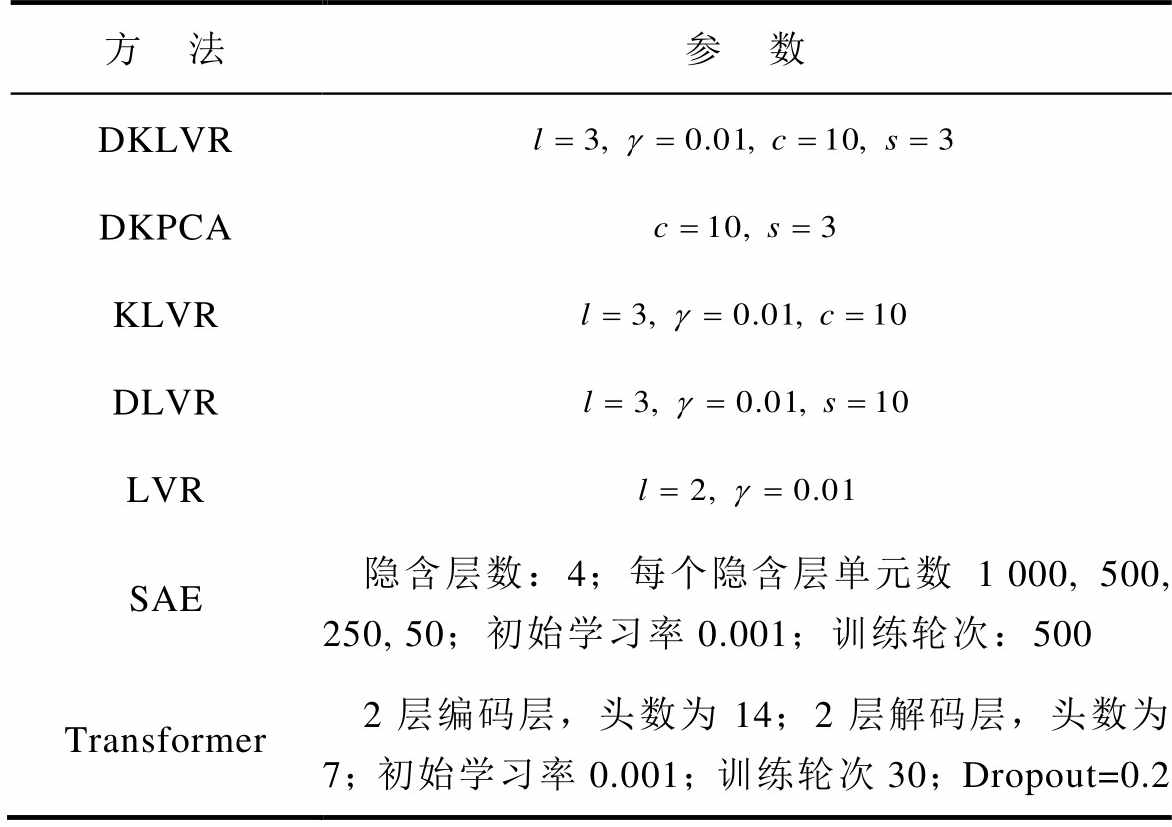
方 法参 数 DKLVR DKPCA KLVR DLVR LVR SAE隐含层数:4;每个隐含层单元数1 000, 500, 250, 50;初始学习率0.001;训练轮次:500 Transformer2层编码层,头数为14;2层解码层,头数为7;初始学习率0.001;训练轮次30;Dropout=0.2
在风机故障检测领域,检测性能更关注鲁棒性和预警能力[29]。因此,为量化实验结果,以进一步的验证本文方法的有效性与先进性。将通过计算误报率(False Positive Rate, FPR)和预警裕量( )来评估方法的性能,计算公式为
)来评估方法的性能,计算公式为
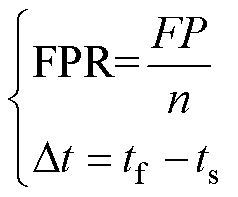 (19)
(19)
式中,n为测试数据正常状况的样本数;FP为正常状况下被检测到故障的数据数;FPR越小说明检测方法性能越好; 为记录中的故障时间;
为记录中的故障时间; 为方法对应的告警时间。越大表示预警能力越强。
为方法对应的告警时间。越大表示预警能力越强。
3.2.1 案例1:改进有效性和必要性分析
在本案例中,将对涉及的四种模型说明如下:
LVR模型:未进行动态非线性改进的传统LVR模型。DLVR模型:仅使用增广矩阵对动态特性进行描述。KLVR模型:仅用核函数映射和FVS处理对非线性过程进行描述。DKLVR模型:本文方法,同时考虑非线性和动态特性。
四种模型检测结果如图6所示。标记点为监测量首次大量且明显超过阈值点处,不难发现,四种方法均能提前94 h发现因轴承故障导致的早期异常,说明消除潜变量影响,可以有效挖掘温度信号中存在的早期故障特征。结合表4给出的检测结果,可以发现,DLVR和KLVR相较于LVR,误报现象虽然得到有效抑制,但DKLVR在相同预警能力的前提下,保持了更低的误报率。说明风机的动态非线性明显会造成扰动,影响模型提取潜变量的能力,从而影响检测的鲁棒性。因此,对LVR模型进行动态核的补充更有益于DFIG的故障检测。
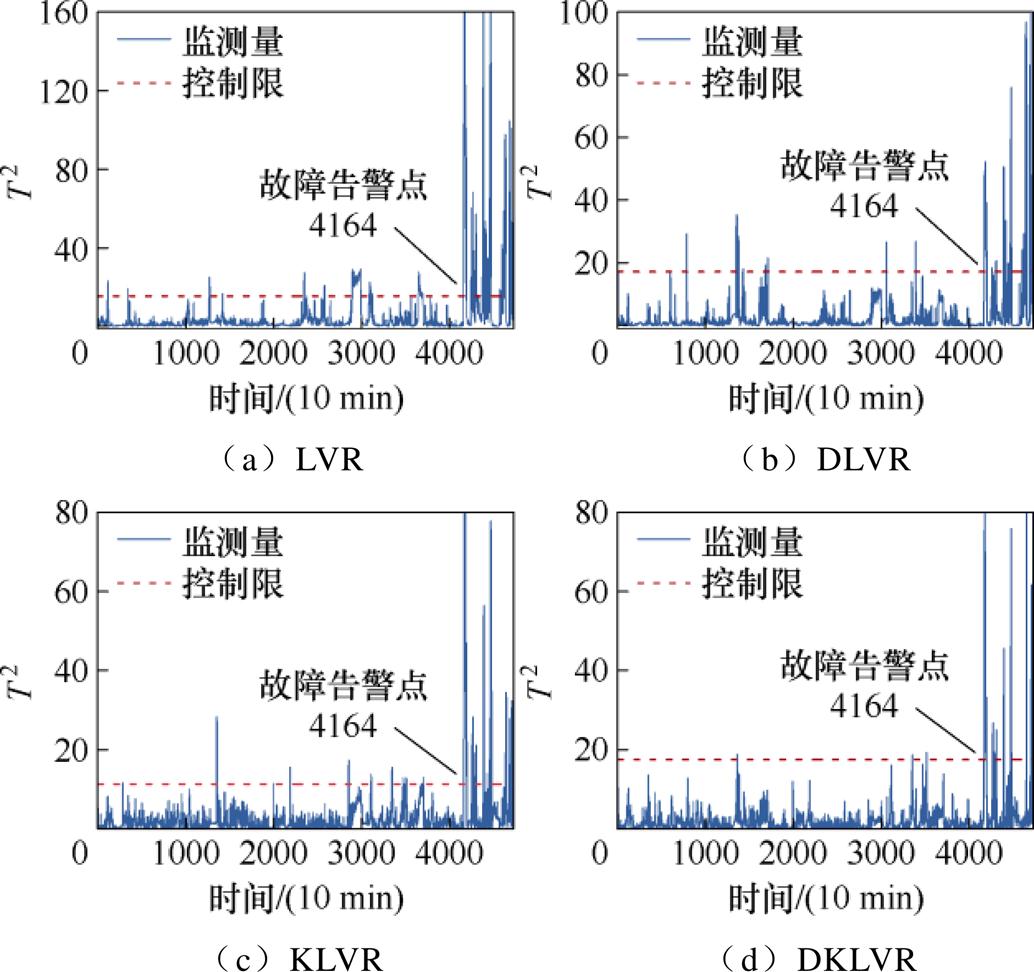
图6 四种模型检测结果
Fig.6 Four models for detecting results
表4 案例1检测结果
Tab.4 Case 1 detection results
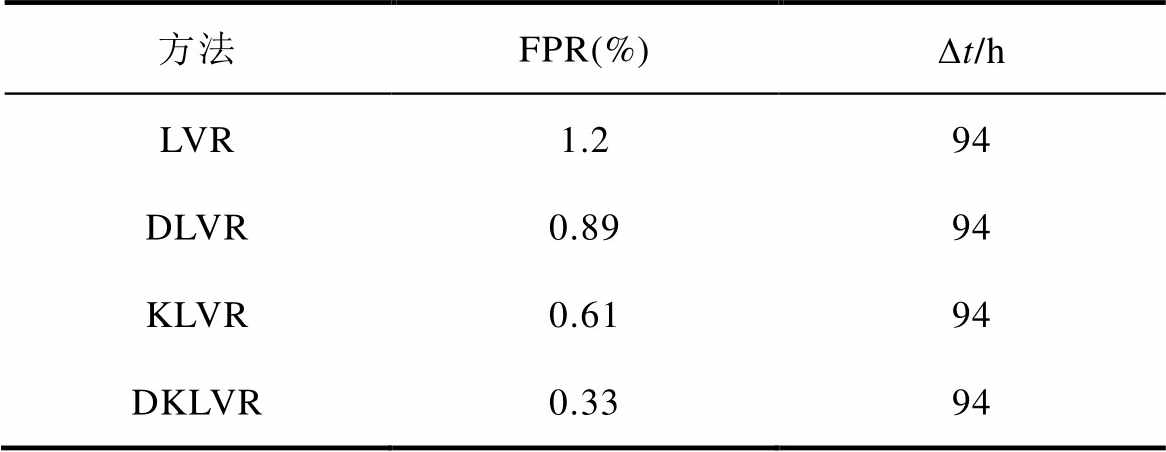
方法FPR(%)Dt/h LVR1.294 DLVR0.8994 KLVR0.6194 DKLVR0.3394
3.2.2 案例2:场景有效性和必要性分析
在本案例中,对涉及的三类场景定义如下:
(1)场景1:为验证第一节所选取的耦合设备温度特征,作为外部变量用以提取潜变量更为有益,
对文献[17]所使用的协变量 作为DKLVR输入进行检测。
作为DKLVR输入进行检测。
(2)场景2:为验证对RS进行正交分解的必要性,构建检测流程未结合PCA的故障检测场景。
(3)场景3:本文方法,用于对比分析。
上述三类场景的检测结果如图7所示。可以发现,基于RS的故障检测场景无论使用哪种变量作为输入,都能够及时检测到故障,且预警时间相差不大。而结合表5的计算结果可以发现,虽然场景2的预警时间稍早于本文所选定的输入场景,这可能是由于温度信号的滞后性导致,但误报率却远低于场景2。综合考虑可以得出,消除耦合部件造成的潜变量影响更有益于DFIG的监测。通过对比图7b和图7c可知,初步分解得到的RS中因仍包含较多的方差噪声,使得场景3的误报率相对高于本文方法,且高度相关的变量可能会导致协方差矩阵接近奇异,进而影响计算稳定性,说明结合PCA构建是有必要的。
3.2.3 案例3:方法先进性分析
为便于分析,将对本案例所涉及的三种对比方法做如下设定:
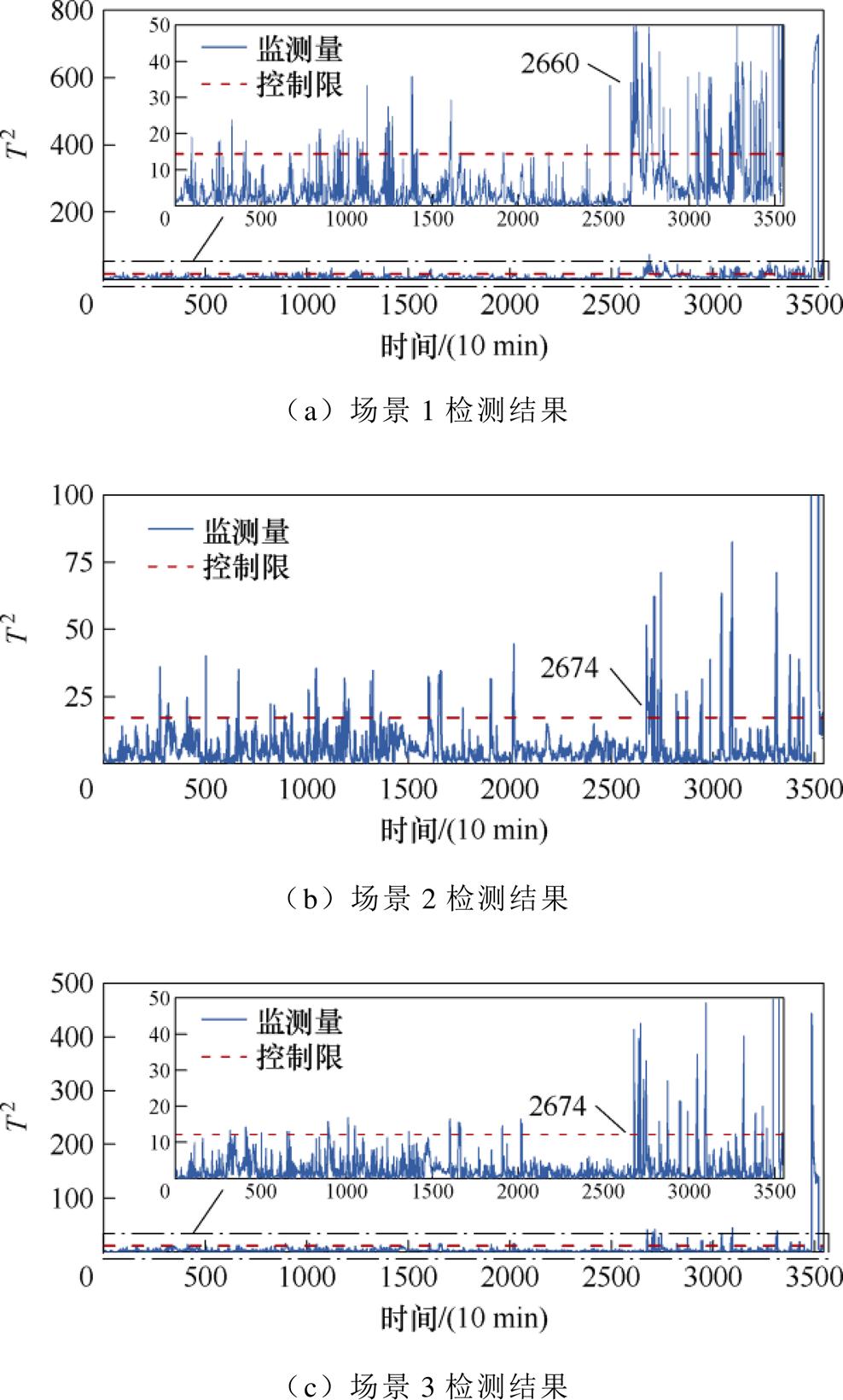
图7 三种场景检测结果
Fig.7 Three scene detection results
表5 案例2检测结果
Tab.5 Case 2 detection results
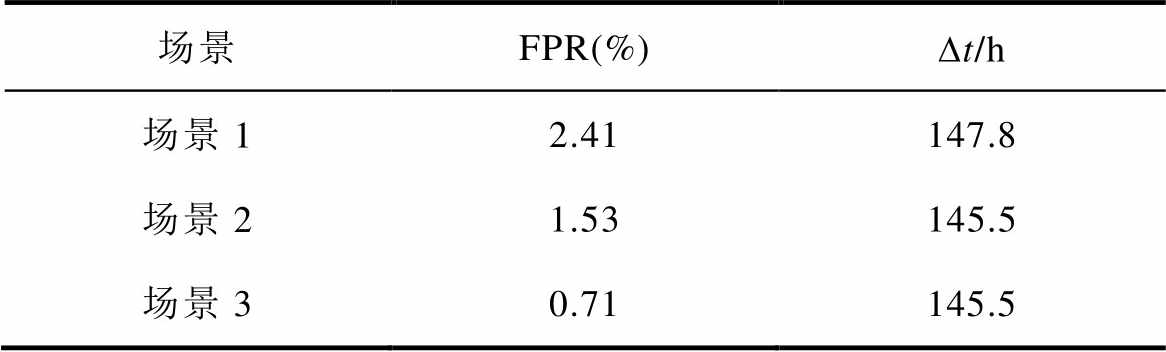
场景FPR(%)Dt/h 场景12.41147.8 场景21.53145.5 场景30.71145.5
(1)在使用Transformer构建预测模型时,鉴于互信息技术也能够作为特征选择方法[30]。因此,输入为本文设定的X,输出也同为Y。
(2)SAE为无监督学习,因此,根据经验选取本文所使用的SCADA数据中与发电机状态相关的特征作为输入,则 ,输出为
,输出为 。
。
(3)结合本文描述场景的DKPCA基本检测原理,提取DFIG相关状态特征的主要成分,并对提取信息构建Hotelling's T2统计量,故所选取特征与SAE相同,但无输出变量。
为做到整体的监控,根据NBM的检测原理,对Transformer输出的预测误差构建预测残差平方和(Residual Sum of Squares, RSS)作为监测量,对SAE输出的重构误差构建重构误差平方和(Squared Prediction Error, SPE)作为监测量[7],阈值同用核密度估计确定。四种方法的测试结果如图8所示,可以发现,故障在第5 158个采样点处便已全面劣化,由于劣化后的趋势相同,因此仅展示局部图。由图8可知,四种方法均可较早且能准确地检测到故障,其中DKLVR方法首次检测到大量异常点的时间比故障彻底劣化时间提前96 h,DKPCA为20.2 h,说明消除DFIG温度信号中外界因素的干扰,更有利于发现早期异常。两种网络模型分别为74.7 h和54 h,结合表6结果,可知DKLVR的误报率更低。可能的原因是网络模型的高预测精度,会导致早期异常不明显。此外,特征的选择也至关重要,以SAE模型为例,其输入特征是根据经验选定的,这会使一些高度共线性的特征包含其中。另外,训练数据的质量会影响NBM的性能,往往需要大量数据并结合数据清洗过程,将使检测流程更为繁琐[31]。而DKLVR通过投影的原理可以有效减少噪声和无关信息的干扰,简化检测流程。并且,RSS和SPE在全局性方面的不足,也可能是导致模型在本文研究中误报率更高,且未能更早捕捉发电机早期故障特征的原因之一。

图8 四种方法检测结果
Fig.8 Four methods detection results
表6 案例3检测结果
Tab.6 Case 3 detection results
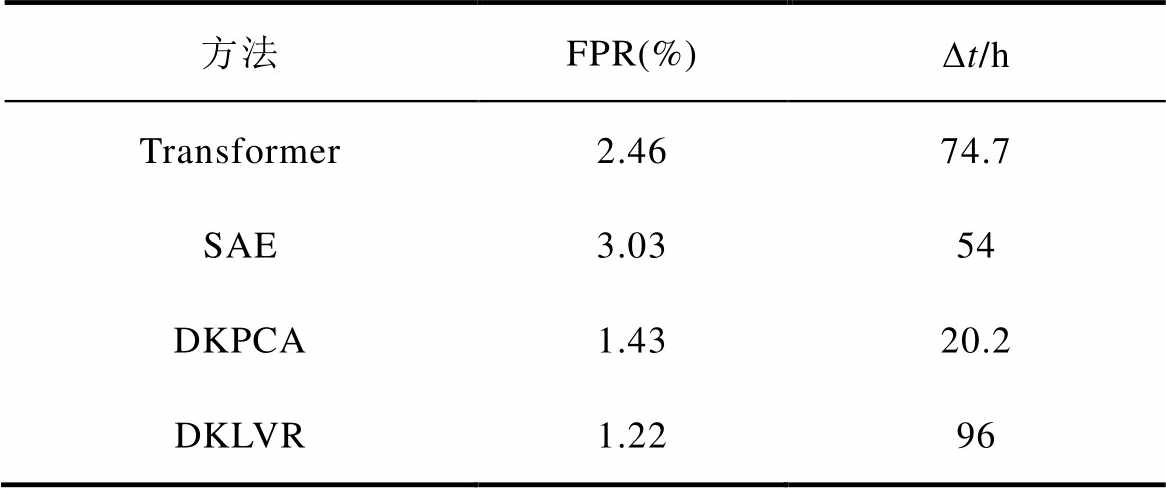
方法FPR(%)Dt/h Transformer2.4674.7 SAE3.0354 DKPCA1.4320.2 DKLVR1.2296
为进一步验证本文方法的检测性能和在线检测能力,将对DKLVR和LVR、Transformer、SAE四种模型,基于上述三个案例进行综合分析,检测指标除平均外,为了综合评价各方法检测性能,增加日误报率(Daily False Positive Rate, DFPR)、日漏报率(Daily False Negative Rate, DFNR)、日准确率(Daily Accuracy, DA)。具体描述为,将三种故障的测试数据,按每日(144个点)划分为96个时间切片。其中标记正常切片79个(案例1:29个,案例2:18个,案例3:32个),异常切片为17个(案例1:4个,案例2:7个,案例3:6个)。规定正常切片中有连续超过1 h(6个采样点)的异常点的切片为异常。DFPR、DFNR和DA[29]为
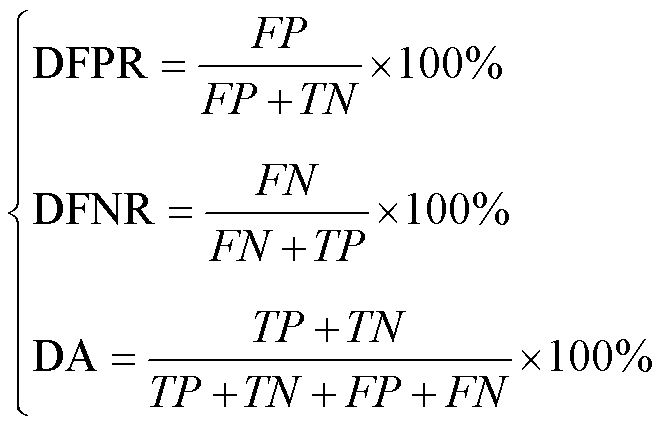 (20)
(20)
式中,FN为异常切片被检测为正常的数量;TP为正确分类为异常的切片数量;TN为正确分类为正常切片的数量。图9展示了计算结果的混淆矩阵,坐标中的0为正常1为异常,横坐标为三个案例的实际分类,纵坐标表示了四种方法的预测情况。以DKLVR对案例2的检测结果为例(图中框线处),表示18个正常切片中仅有1个被误判为异常,7个异常切片有1个误判为正常。根据该混淆矩阵所计算的DFPR、DFNR、DA结果由表7展示。
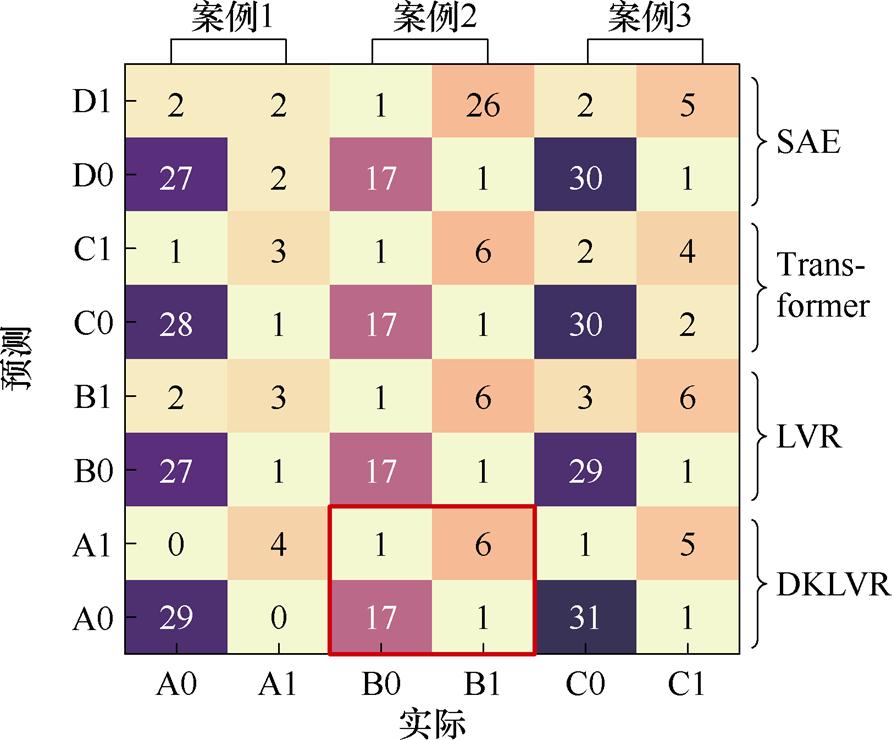
图9 综合分析混淆矩阵 Fig.9 Comprehensive analysis of the confusion matrix
表7 综合分析结果
Tab.7 Comprehensive analysis results
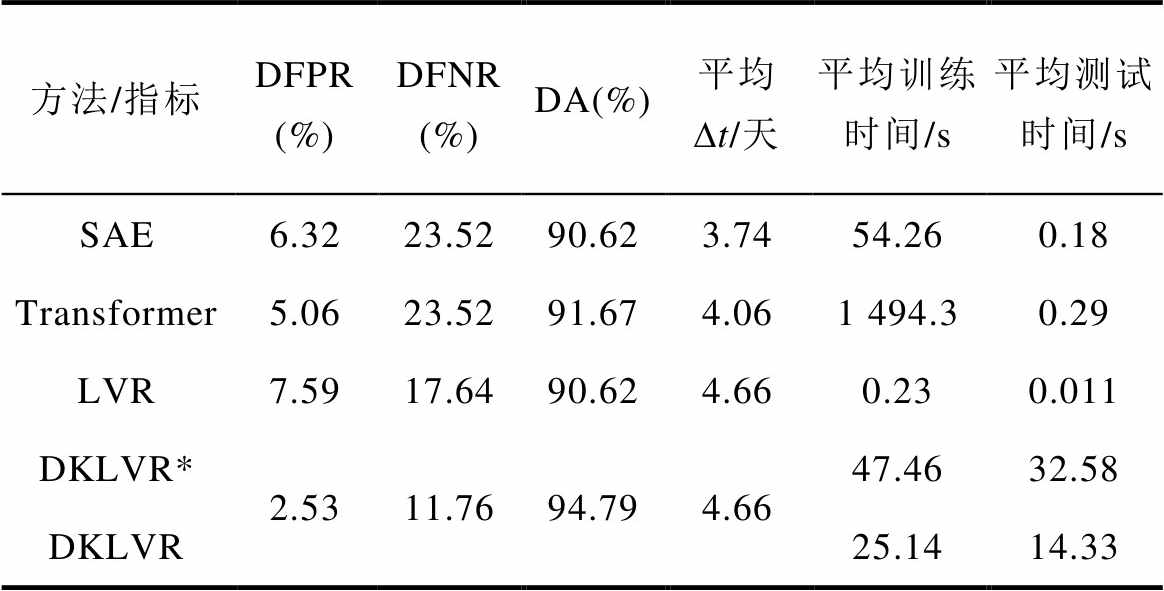
方法/指标DFPR (%)DFNR (%)DA(%)平均Dt/天平均训练时间/s平均测试时间/s SAE6.3223.5290.623.7454.260.18 Transformer5.0623.5291.674.061 494.30.29 LVR7.5917.6490.624.660.230.011 DKLVR*2.5311.7694.794.6647.4632.58 DKLVR25.1414.33
可以发现,本文所提出方法在DFPR、DFNR和DA三个指标中均优于传统方法和主流方法。且能够在保持较低误报率和高准确率的同时更早地检测到因故障引起的早期异常,进一步证明了本文方法能够适用于风电系统DFIG的故障检测,且在本文场景下检测性能更加优越。
同时,模型的复杂程度也会影响方法的在线检测能力。因此,增加模型三个案例的平均训练时间和测试时间作为计算效率的指标。使用具有2.3 GHz处理器和16 GB RAM的计算机来获取结果。所涉及的方法对三个案例的指标计算结果也由表7展示。此外,除上述四类方法外,还引入不经FVS转换的DKLVR*模型进行比较。由于两种方法的检测结果差异较小,对于前述的四类检测性能指标的计算也相同。因此,仅展示模型的计算性能指标。不难发现,两种DKLVR模型虽然训练时间均长于LVR,主要原因是由高维映射导致,但却小于两种神经网络模型的时间,Transformer训练时间最长的原因是由复杂的网络结构导致,而SAE训练时间则主要由堆叠层数决定。通过对比DKLVR和DKLVR*可以发现,经过FVS处理后的模型计算效率得以显著提升,说明本文方法能够在保持原有性能的基础上,降低模型的复杂度。这将有益于模型的更新和面对海量数据时的计算。虽然平均测试时间较高,但在实际工程中绝大多数的SCADA系统对每个数据点的采样间隔大多为10 min,最高采样精度也为1 s,而本文方法在线阶段平均处理每个数据点的时间仅为3.11 ms,能够满足在线检测的要求[16]。
当检测到DFIG故障时,根据式(15)计算残差空间中每个分量的贡献度,计算结果如图10所示,可以发现结合PCA构建的T2统计量,通过进一步延伸可以定位故障的位置,其中案例1和案例3中所对应的轴承驱动端和非驱动端表现最为明显。案例2中三相绕组的贡献度也均高于轴承部件,但细分每相绕组时,虽差异不大,但A相绕组也高于其他两相,符合3.1.1节故障描述时的分析结果。虽然本文方法在不依靠大量历史数据的前提下,能够对故障位置进行判断,但具体的故障类型和原因仍需结合更高采样精度的电流信号或振动信号进行诊断。
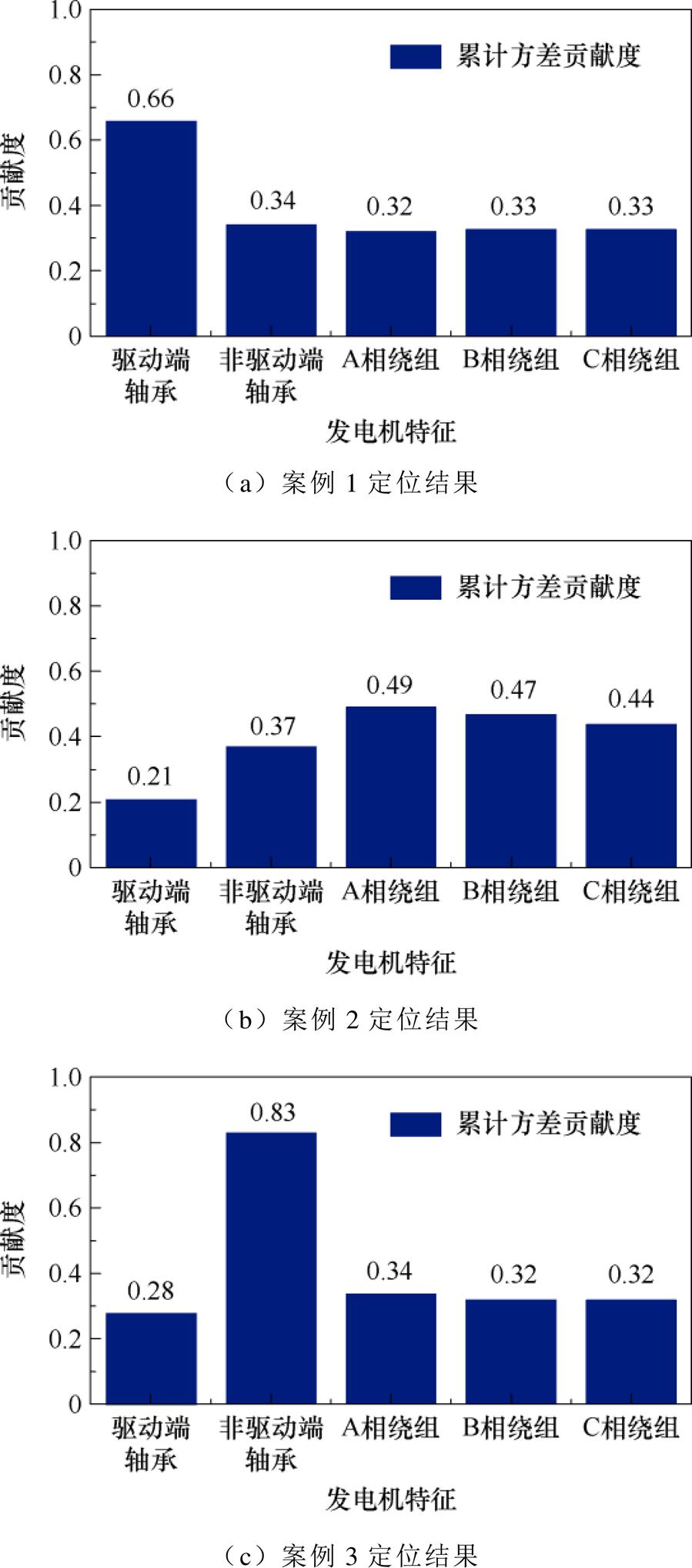
图10 三个案例的故障定位结果
Fig.10 Fault localization results of three cases
DFIG温度信号因受外界因素造成的潜变量影响,难以准确、及时地从中发现因不同故障导致的早期异常。因此,本文提出一种基于动态核潜变量回归的DFIG早期故障检测方法。采用风场采集的SCADA数据和三种不同故障的实际案例进行针对性分析和综合分析。结论如下:
1)采用有监督MSPC技术,开发消除潜变量影响后的RS,并构建统计量。实验结果表明,提出的方法能够在故障发生前94~145.5 h从DFIG温度特征中,有效且敏感地发觉因不同故障引起的异常。
2)为能够在风机动态非线性的影响下,准确提取并消除潜变量的影响,构建DKLVR模型并开发在线检测框架。与多种方法和场景的实验对比结果表明,提出的方法误报率为0.33%~1.22%,在保持更低误报率的同时准确发现了初期异常。
3)与传统LVR和主流故障检测方法进行综合分析对比,结果表明,在本文场景下,提出的检测方法,在日准确率达到94.79%的情况下,平均提前4.66天检测到故障。且结合FVS处理的模型训练时间和测试时间得到有效提升,在满足在线检测要求的同时,准确定位故障位置。
SCADA数据除受系统动态非线性影响外,其本身还存在非平稳、分频特性。因此,未来的研究将集中于应对数据特性对早期故障检测带来的挑战。
附录 FVS实现过程
在特征空间中,目标是通过特征子空间中的基向量来重构原始数据点的特征向量 。通过线性组合,重构的特征向量
。通过线性组合,重构的特征向量 近似,有
近似,有
 (A1)
(A1)
式中, 为由L个选择的特征向量组成的矩阵,=
为由L个选择的特征向量组成的矩阵,=  ;
; 为对应的权系数向量。为了让
为对应的权系数向量。为了让 尽可能地接近
尽可能地接近 ,需要最小化它们之间的重构误差。通过定义正则化的欧氏距离
,需要最小化它们之间的重构误差。通过定义正则化的欧氏距离 来度量误差,有
来度量误差,有
 (A2)
(A2)
目标是使得最小化,从而得到最优的 。最小化的过程可以通过求解以下优化问题得到。
。最小化的过程可以通过求解以下优化问题得到。
 (A3)
(A3)
 (A4)
(A4)
 (A5)
(A5)
 (A6)
(A6)
 (A7)
(A7)
为评估特征子空间的优劣,定义局部适应度 和全局适应度
和全局适应度 。其中,
。其中, 反映和之间的误差,可表示为
反映和之间的误差,可表示为
 (A8)
(A8)
式中,为所有样本点的局部适应度的平均值,越大表示特征向量选择越好,可表示为
 (A9)
(A9)
然后通过前向顺序选择的进行迭代,逐步选择出最优的特征向量,最终形成特征子空间。当达到预设的全局适应度的阈值(根据经验选定为0.98),或 不可逆时,则停止计算。经过FVS处理后,通过特征子空间重构观测变量,保证数据的空间分布结构基本不变。更具体的实现步骤和原理推导可参考文献[26-27]。
不可逆时,则停止计算。经过FVS处理后,通过特征子空间重构观测变量,保证数据的空间分布结构基本不变。更具体的实现步骤和原理推导可参考文献[26-27]。
参考文献
[1] GWEC|Global wind report 2025[EB/OL]. https://gwec. net/global-wind-report-2025.
[2] 朱茂林, 刘灏, 毕天姝. 考虑风电场量测相关性的双馈风力发电机鲁棒动态状态估计[J]. 电工技术学报, 2023, 38(3): 726-740.
Zhu Maolin, Liu Hao, Bi Tianshu. Robust dynamic state estimation of doubly-fed induction generator considering measurement correlation in wind farms[J]. Transactions of China Electrotechnical Society, 2023, 38(3): 726-740.
[3] 庞彬, 郑涵升, 周紫烨, 等. 考虑不平衡磁拉力的双馈异步风力发电机轴承外圈故障动力学建模[J].电机与控制应用, 2024, 51(3): 30-37.
Pang Bin, Zheng Hansheng, Zhou Ziye, et al. Dynamic modeling of doubly-fed wind turbine bearing outer ring fault considering unbalanced magnetic pull[J]. Electric Machines & Control Application, 2024, 51(3): 30-37.
[4] 夏志凌, 胡凯波, 刘心悦, 等. 基于变模态分解的异步电机转子断条故障诊断[J]. 电工技术学报, 2023, 38(8): 2048-2059.
Xia Zhiling, Hu Kaibo, Liu Xinyue, et al. Fault diagnosis of rotor broken bar in induction motor based on variable mode decomposition[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(8): 2048-2059.
[5] 张辉, 戈宝军, 韩斌, 等. 基于GAF-CapsNet的电机轴承故障诊断方法[J]. 电工技术学报, 2023, 38(10): 2675-2685.
Zhang Hui, Ge Baojun, Han Bin, et al. Fault diagnosis method of motor bearing based on GAF-CapsNet[J]. Transactions of China Electrotechnical Society, 2023, 38(10): 2675-2685.
[6] 许伯强, 郑泽慧. 基于Duffing系统与APES算法的DFIG定子匝间故障检测新方法[J]. 电力自动化设备, 2019, 39(5): 103-108.
Xu Boqiang, Zheng Zehui. Novel method based on Duffing system and APES algorithm for stator winding inter-turn fault detection of DFIG[J]. Electric Power Automation Equipment, 2019, 39(5): 103-108.
[7] Wang Ziqi, Jin Xiaohang, Xu Zhengguo. An adaptive condition monitoring method of wind turbines based on multivariate state estimation technique and continual learning[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 3513009.
[8] 刘展, 刘健洵, 包琰洋, 等. 基于图正则化堆叠自编码器的风机轴承故障诊断方法[J]. 发电技术, 2024, 45(6): 1146-1152.
Liu Zhan, Liu Jianxun, Bao Yanyang, et al. Bearing faults diagnosis method based on stacked auto- encoder with graph regularization for wind turbines[J]. Power Generation Technology, 2024, 45(6): 1146- 1152.
[9] 刘展, 包琰洋, 李大字. 基于重采样降噪与主成分分析的宽卷积深度神经网络风机故障诊断方法[J]. 发电技术, 2023, 44(6): 824-832.
Liu Zhan, Bao Yanyang, Li Dazi. Fault diagnosis method of wind turbines based on wide deep convolutional neural network with resampling and principal component analysis[J]. Power Generation Technology, 2023, 44(6): 824-832.
[10] Xiang Ling, Yang Xin, Hu Aijun, et al. Condition monitoring and anomaly detection of wind turbine based on cascaded and bidirectional deep learning networks[J]. Applied Energy, 2022, 305: 117925.
[11] 魏书荣, 张鑫, 符杨, 等. 基于GRA-LSTM-Stacking模型的海上双馈风力发电机早期故障预警与诊断[J]. 中国电机工程学报, 2021, 41(7): 2373-2383.
Wei Shurong, Zhang Xin, Fu Yang, et al. Early fault warning and diagnosis of offshore wind DFIG based on GRA-LSTM-Stacking model[J]. Proceedings of the CSEE, 2021, 41(7): 2373-2383.
[12] 赵洪山, 林诗雨, 孙承妍, 等. 考虑多时间尺度信息的风力发电机滚动轴承故障预测[J]. 中国电机工程学报, 2024, 44(22): 8908-8920.
Zhao Hongshan, Lin Shiyu, Sun Chengyan, et al. Fault prediction of wind turbine rolling bearing con- sidering multi-time scale information[J]. Proceedings of the CSEE, 2024, 44(22): 8908-8920.
[13] 赵洪山, 刘辉海, 刘宏杨, 等. 基于堆叠自编码网络的风电机组发电机状态监测与故障诊断[J]. 电力系统自动化, 2018, 42(11): 102-108.
Zhao Hongshan, Liu Huihai, Liu Hongyang, et al. Condition monitoring and fault diagnosis of wind turbine generator based on stacked autoencoder network[J]. Automation of Electric Power Systems, 2018, 42(11): 102-108.
[14] Jin Xiaohang, Xu Zhuangwei, Qiao Wei. Condition monitoring of wind turbine generators using SCADA data analysis[J]. IEEE Transactions on Sustainable Energy, 2021, 12(1): 202-210.
[15] Wang Yifei, Ma Xiandong, Qian Peng. Wind turbine fault detection and identification through PCA-based optimal variable selection[J]. IEEE Transactions on Sustainable Energy, 2018, 9(4): 1627-1635.
[16] Zhang Kai, Tang Baoping, Deng Lei, et al. Fault detection of wind turbines by subspace reconstruction- based robust kernel principal component analysis[J]. IEEE Transactions on Instrumentation and Measure- ment, 2021, 70: 3515711.
[17] Liu Xingchen, Du Juan, Ye Zhisheng. A condition monitoring and fault isolation system for wind turbine based on SCADA data[J]. IEEE Transactions on Industrial Informatics, 2022, 18(2): 986-995.
[18] 陈鹏, 谢颖, 李道璐. 感应电机定子匝间短路故障温升特性研究[J]. 电工技术学报, 2023, 38(18): 4875-4888.
Chen Peng, Xie Ying, Li Daolu. Research on the temperature rise characteristics of induction motors with stator inter-turn fault[J]. Transactions of China Electrotechnical Society, 2023, 38(18): 4875-4888.
[19] Zhu Qinqin. Latent variable regression for supervised modeling and monitoring[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(3): 800-811.
[20] Zhu Qinqin, Joe Qin S, Dong Yining. Dynamic latent variable regression for inferential sensor modeling and monitoring[J]. Computers & Chemical Engin- eering, 2020, 137: 106809.
[21] Zhang Haitian, Zhu Qinqin. Concurrent multilayer fault monitoring with nonlinear latent variable regression[J]. Industrial & Engineering Chemistry Research, 2022, 61(3): 1423-1442.
[22] Bazan G H, Scalassara P R, Endo W, et al. Stator short-circuit diagnosis in induction motors using mutual information and intelligent systems[J]. IEEE Transactions on Industrial Electronics, 2019, 66(4): 3237-3246.
[23] 孔祥玉, 曹泽豪, 安秋生, 等. 偏最小二乘线性模型及其非线性动态扩展模型综述[J]. 控制与决策, 2018, 33(9): 1537-1548.
Kong Xiangyu, Cao Zehao, An Qiusheng, et al. Review of partial least squares linear models and their nonlinear dynamic expansion models[J]. Control and Decision, 2018, 33(9): 1537-1548.
[24] 董峰, 李昭, 李凌涵, 等. 多模态动态核主成分分析的气液两相流状态监测[J]. 自动化学报, 2022, 48(3): 762-773.
Dong Feng, Li Zhao, Li Linghan, et al. Flow state monitoring of gas-liquid two-phase flow using multiple dynamic kernel principle component analysis[J]. Acta Automatica Sinica, 2022, 48(3): 762-773.
[25] 周平, 刘记平, 梁梦圆, 等. 基于KPLS鲁棒重构误差的高炉燃料比监测与异常识别[J]. 自动化学报, 2021, 47(7): 1661-1671.
Zhou Ping, Liu Jiping, Liang Mengyuan, et al. KPLS robust reconstruction error based monitoring and anomaly identification of fuel ratio in blast furnace ironmaking[J]. Acta Automatica Sinica, 2021, 47(7): 1661-1671.
[26] Zhang Qi, Li Peng, Lang Xun, et al. Improved dynamic kernel principal component analysis for fault detection[J]. Measurement, 2020, 158: 107738.
[27] 李军, 张观东. FVS-MSVM方法在机器人建模与辨识中的应用[J]. 振动与冲击, 2018, 37(20): 67-74.
Li Jun, Zhang Guandong. Robot modeling and identi- fication based on the FVS-MSVM methodmethod[J]. Journal of Vibration and Shock, 2018, 37(20): 67- 74.
[28] Wei Lu, Qian Zheng, Zareipour H. Wind turbine pitch system condition monitoring and fault detection based on optimized relevance vector machine regression[J]. IEEE Transactions on Sustainable Energy, 2020, 11(4): 2326-2336.
[29] Yang Luoxiao, Zhang Zijun. A conditional con- volutional autoencoder-based method for monitoring wind turbine blade breakages[J]. IEEE Transactions on Industrial Informatics, 2021, 17(9): 6390-6398.
[30] 许伯强, 王彪, 孙丽玲, 等. 基于改进EEMD和强化视觉Transformer模型的风电机组故障预警[J]. 电工技术学报, 2025, 40(20): 6537-6551.
Xu Boqiang, Wang Biao, Sun Liling, et al. Fault warning of wind turbine based on improved EEMD and enhanced visual transformer model[J]. Transa- ctions of China Electrotechnical Society, 2025, 40(20): 6537-6551.
[31] 马然, 栗文义, 齐咏生. 风电机组健康状态预测中异常数据在线清洗[J]. 电工技术学报, 2021, 36(10): 2127-2139.
Ma Ran, Li Wenyi, Qi Yongsheng. Online cleaning of abnormal data for the prediction of wind turbine health condition[J]. Transactions of China Electro- technical Society, 2021, 36(10): 2127-2139.
Abstract Double-fed induction generators (DFIG) in wind turbines face significant challenges in accurately and promptly detecting early anomalies caused by various faults due to latent variables arising from operational conditions and coupling mechanisms. This paper proposes a fault detection method for DFIG based on dynamic kernel latent variable regression (DKLVR). The aim is to achieve unified monitoring of DFIG under dynamic and nonlinear conditions using multiple variables, thereby robustly and sensitively identifying early fault characteristics in their initial stages.
The mutual information principle is employed to analyze the overall temperature characteristics of the DFIG, identifying external factors that affect its stability. The temperature characteristics of coupling components have a more significant influence on the overall temperature characteristics of DFIG, and this influence exists in an unobservable form, i.e., as latent variables. Thus, a latent variable regression (LVR) model is needed to extract and eliminate the latent variables. However, LVR models have rarely been applied in the wind power field. Moreover, due to the influence of wind turbine operating conditions, SCADA data exhibit dynamic and nonlinear characteristics. This study introduces time-delay data into LVR to describe the dynamic characteristics of wind turbine operations and employs kernel functions to capture the nonlinear characteristics of the process. Additionally, feature vector selection methods are used to mitigate the dimensionality issues arising from high-dimensional mappings.
Based on these enhancements, a DKLVR-based online fault detection framework for DFIG is proposed. The specific process includes:(1) Standardizing SCADA historical data from wind turbines. (2) Training the DKLVR model using historical data to determine key parameters. (3) Constructing generator monitoring statistics based on the residual subspace using PCA and determining control limits. (4) Online detection: If new input data exceeds the control limits, a generator fault is identified. Fault variables are determined through residual contribution analysis. Three typical DFIG fault cases (bearing fault, winding fault, and slip ring fault) were analyzed using two performance indicators: false alarm rate and early warning margin. The results show that the proposed method outperforms DLVR, KLVR, and LVR in better adapting to the dynamic and nonlinear characteristics of wind turbine SCADA data. In three different scenarios, the proposed detection method is more reasonable and practical. Additionally, compared with mainstream detection methods, such as Transformer, SAE, and DKPCA, the proposed method exhibits superior detection performance and is capable of locating the positions of all three types of faults. Finally, a comprehensive analysis is conducted using indicators such as the daily false alarm rate and training time for DKLVR, LVR, Transformer, and SAE. The results demonstrate that the proposed method meets the online detection requirements and exhibits superior detection performance.
Keywords:Doubly-fed induction generator, fault detection, multivariate statistical process control, dynamic kernel latent variable regression, latent variable
尹彦博 男,1995年生,博士研究生,研究方向为风电系统发电机设备的状态监测与故障诊断。
E-mail: yinyanbo_ncepu@126.com
许伯强 男,1972年生,教授,博士生导师,研究方向为大型电机的状态监测与故障诊断。
E-mail: xbq_ncepu@126.com(通信作者)
中图分类号:TM307
DOI: 10.19595/j.cnki.1000-6753.tces.242077
国家自然科学基金资助项目(51277077)。
收稿日期 2024-11-19
改稿日期 2025-03-24
(编辑 崔文静)