 [6]。为节约计算资源和数据存储空间,更利于实现在线监测,本文通过提取单相定子电流中的故障频率特征实现故障诊断。利用定子电流准确识别牵引电机转子断条故障需要考虑以下两个特点:
[6]。为节约计算资源和数据存储空间,更利于实现在线监测,本文通过提取单相定子电流中的故障频率特征实现故障诊断。利用定子电流准确识别牵引电机转子断条故障需要考虑以下两个特点:摘要 牵引电机是高速列车的动力部件,准确地诊断牵引电机转子断条故障是保障高速列车安全运行的重要手段,也是故障预测和健康管理(PHM)的重要内容之一。牵引电机发生转子断条故障时,故障频率与供电频率接近,且幅值小,易被掩盖;故障频率变化范围大,导致故障特征尺度变化大,有效特征难以提取,诊断结果不准确。为解决这些问题,该文提出一种基于多尺度特征融合卷积神经网络(MSFFCNN)的故障诊断方法。为剔除信号中的电源频率分量,增强故障特征,采用希尔伯特变换(HT)对电流进行预处理,并将其转换为图像;为适应不同尺度特征,实现有效特征提取,将高效通道注意力(ECA)融入多尺度卷积模块,突出有效特征;在此基础上,设计了MSFFCNN模型。在两个转子断条故障数据集上进行了实验,平均诊断准确率分别达到了99.85%和99.82%。与相关的方法相比,所提诊断方法表现出更强的特征提取能力、抗噪能力和泛化性能,能够更为准确地识别转子断条故障,为牵引电机维修计划的针对性制定提供参考。
关键词:希尔伯特变换 多尺度卷积 注意力机制 故障诊断 转子断条
牵引电机是高速列车牵引传动系统的关键部件,将电能转化为机械能,为列车提供动力,其运行状态对于列车的安全运行至关重要[1]。国内高速列车的牵引电机通常采用三相异步感应电机,主要由定子、转子、轴承等结构组成[2]。在列车运行中,牵引电机频繁地在多工况运行模式切换,反复的牵引、惰行、制动将使转子受到循环的热应力,加上交变的电磁力、离心力等长期作用,最终造成转子断条故障。据统计,牵引电机转子断条故障约占其全部故障的10%[3]。断条故障早期通常为一根导条部分断裂或完全断裂,使得相邻导条电流增大,产生局部过热,更易引发相邻转子条断裂。断条故障早期故障特征不明显,若不能及时发现并处理,将会逐渐扩散,导致牵引电机的性能下降,严重时可能危及列车运行安全。因此,及时发现牵引电机转子断条故障并检测其故障程度(如转子断条数目),采取相应的措施和维修方案,是保障高速列车安全运行的重要手段,也是故障预测和健康管理(Pro- gnostics and Health Management, PHM)的重要内容之一。
转子断条故障时在定子电流、磁通、转矩、功率中均会出现故障相关的成分[4]。发生故障的导条电流转移到相邻导条,使得转子电流分布发生变化,其产生的磁场也随转子的转动发生周期性变化,通过电磁相互感应,在三相定子绕组中感应出相应的电动势,从而出现对应的故障特征频率,表现为特定频率的幅度调制[5],电机功率和转矩随之出现波动。电机定子电流是受故障直接影响的量,且无需安装额外传感器,易于获取,具有非侵入性的特点,成为转子断条故障诊断的首选分析信号。发生转子断条故障时,定子电流在时域中表现为幅值的周期性变化,频域中出现与转差率s和电源频率fs有关的故障频率[6]。为节约计算资源和数据存储空间,更利于实现在线监测,本文通过提取单相定子电流中的故障频率特征实现故障诊断。利用定子电流准确识别牵引电机转子断条故障需要考虑以下两个特点:
(1)故障分量易被电源分量掩盖。由于牵引电机正常运行时,转差率较小,故障频率与电源频率相近,且高速列车通常单台牵引变流器驱动四台牵引电机,变流器输出电流中电源分量的幅值约为单台电机电流的4倍,单台电机出现转子断条故障时,相对于电源频率幅值,故障分量幅值较小,导致故障分量易被电源分量掩盖。
(2)故障频率变化范围大。与传统工频供电的电机不同,高速列车牵引电机由牵引变流器供电,频率因运行工况的不同而改变,而故障频率随供电频率变化,使得故障频率变化范围比工频供电电 机大。
利用电流信号实现电机转子断条故障诊断的方法可分为两类:基于信号分析的方法[7-10]和基于人工智能的方法[11-25]。
基于信号分析的方法主要通过提高频率分辨率或基频抑制来解决传统频谱分析时的故障频率被基频掩盖问题。如文献[8]在电流信号的二次方上使用多重信号分类(Multiple Signal Classification, MUSIC)算法,相较于经典的快速傅里叶变换(Fast Fourier Transform, FFT)频谱分析,有效地提高了频率分辨率,能够在多种负载条件下检测转子断条故障。基频抑制方法常用的有希尔伯特变换(Hilbert Transformation, HT)[9]、电流整流分析[10]、Teager- Kaiser能量算子(Teager-Kaiser Energy Operator, TKEO)[11]等。如文献[9]通过HT把基频分量转换为直流分量剔除,再使用FFT频谱分析识别牵引电机转子断条故障频率分量。然而上述基于信号分析的方法均需要利用电流基频和转速确定理论故障频率,受到电机运行条件的影响较大,牵引电机大范围的转速变化、供电频率变化均会导致故障频率的变化,容易出现误检或漏检。
基于人工智能的方法从历史数据中学习各种故障模式的特点,从而对故障做出预测。可分为两类:浅层学习[12-13]和深度学习[14-25]。浅层学习首先对原始信号进行人工特征提取,构造与故障成分相关的特征向量,然后输入网络进行训练和分类。如文献[13]建立基于经验模态分解能量熵和故障属性知识编码的故障特征矩阵,输入支持向量机分类识别牵引电机故障。这些信号特征提取由人工设计,诊断准确性受特征提取效果影响很大。深度学习方法克服了上述问题,无需人工设计特征提取流程,直接使用原始信号或简单预处理后的信号为输入,自动提取特征,实现端到端的诊断。目前,常用的深度学习网络模型有自编码器(Auto Encoder, AE)[14]、递归神经网络(Recurrent Neural Network, RNN)[15]、卷积神经网络(Convolutional Neural Network, CNN)[16]等。其中,CNN以其权重共享、局部感知和平移不变性等特点,以及强大的特征提取能力,在电机故障诊断中得到广泛应用[16-25]。
文献[16]提取三相电流信号小波系数的二范数作为特征向量,输入设计的一维CNN网络中实现牵引电机匝间短路故障诊断。为充分发挥CNN在图像特征提取方面的优势,提高特征提取的效果,基于CNN的故障诊断通常首先进行预处理将信号转换为图像[17]。文献[18]将多传感器信号归一化后融合生成图像,采用CNN实现端到端的高速列车转向架旋转设备的故障诊断。文献[19]使用小波变换进行时频编码,将时频图像作为CNN输入,同时提取信号的时域和频域信息。为避免时频编码所需要的专家知识,如小波变换时小波基函数的选择,文献[20]提出一种时域的图像编码方法,无需任何参数。转子断条时电流信号中电源分量占主导,故障分量易被电源分量掩盖,上述方法得到的图像中故障特征不明显。为此,文献[21]使用陷波滤波器滤去电源频率成分,以增强故障特征,然后将电流信号转换为图像,输入CNN实现转子断条故障程度的检测。但陷波滤波器仅在电源频率固定不变的情况下有效,对变频器驱动的牵引电机并不适用。
相较于工频供电的感应电机,牵引电机转子断条故障频率可能的变化范围更大,不同故障频率的电流生成的图像特征尺度不同。基于CNN的诊断网络通常采用固定尺寸卷积核,难以提取到不同尺度的特征信息[22-23]。文献[24]针对振动信号的时间尺度不一,设计多尺度的CNN模型,提取多尺度特征,实现了对轴承故障类型、故障尺寸以及运行工况的识别。文献[25]构建了具有残差连接的多尺度特征提取模块,使用该模块提取特征,实现了转子不同故障程度的检测。然而,模型中提取到的不同尺度特征权重一致,容易出现过拟合,反而导致模型泛化能力下降。
为解决上述问题,本文结合信号处理和深度学习的优势,提出了一种用于牵引电机转子断条故障诊断的多尺度特征融合CNN(Multi-Scale Feature Fusion CNN, MSFFCNN)。主要贡献为:
(1)使用转子故障电流信号的故障先验知识,指导基于深度学习诊断模型的预处理,将HT应用于电流信号预处理,剔除电源频率分量,增强故障特征,降低特征提取的难度。
(2)为适应不同尺度的特征,自动提取有效特征,构建注意力融合的多尺度特征提取模块。使用高效通道注意力(Efficient Channel Attention, ECA)机制[26]对多尺度卷积进行改进,动态调整不同通道的权重,增强多尺度特征融合效果。
(3)综合以上预处理步骤和多尺度特征提取模块,构建用于转子断条故障诊断的MSFFCNN。在两个转子断条数据集上进行实验验证,设计消融实验和对比实验,验证了所提方法的有效性和优越性。
转子断条故障时,可以看作定子电流幅值被故障分量调制[5]。因此,可通过基于HT的包络分析实现解调,获得仅含故障频率成分的信号。为便于卷积高效提取特征,将得到的包络信号转换成图像。
通过计算原信号的HT,构造一个解析信号,该解析信号的模即为原信号的包络。对于一个实值信号x(t),其HT可表示为与1/(pt)的卷积,见式(1),其物理意义为将信号的相位推迟90°。
 (1)
(1)
式中,*表示卷积。
解析信号以原信号为实部,原信号经HT后的信号为虚部构成,有
 (2)
(2)
式中,z(t)为解析信号;j为虚数单位。
该解析信号的模即为信号x(t)的包络,即
 (3)
(3)
式中, 为信号x(t)的包络。
为信号x(t)的包络。
转子断条故障时,定子电流可表示[6]为
 (4)
(4)
其中
fbrb=2ksfs k=1, 2,…
式中,I0为定子电流幅值;fs为电源频率;fbrb为故障频率;s为转差率;bk为故障频率分量与定子电流分量的幅值比。
由于k=1时故障频率幅值最大,仅考虑主要谐波成分时,定子电流可表示为
 (5)
(5)
式中, 为k=1时bk的值。
为k=1时bk的值。
式(5)可写为

 (6)
(6)
式中,第一项I0cos(2pfst)为正常时的电流分量;后两项为转子断条故障分量。
利用HT的物理意义,将信号相位推迟90°,余弦函数变为正弦函数,得到式(6)的HT为

 (7)
(7)
式(7)可写为
 (8)
(8)
则将式(5)和式(8)分别作为实部和虚部,构建的解析信号可表示为
 (9)
(9)
通过取模操作,即可获得电流信号包络。包络信号中仅包含直流和故障频率成分,且在整个计算过程中,无需知道定子电流频率fs,适用于不同的供电频率的电流信号。
实际计算中,采集电流信号为离散序列,难以直接采用相位延迟方法获得HT。为简化计算,可用Matlab中“firpm([ ], ’hilbert’)”代码生成具有准线性相位的HT时域滤波器来计算解析信号的虚 部[27]。基于HT的电流信号数据预处理步骤如下:
(1)设采集电流序列为x,长度为L,代码生成的HT时域滤波器为h=[h1 h2…hn],则电流序列x的HT可表示为
 (10)
(10)
(2)通过h构建矩阵C。
 (11)
(11)
式中, ;n为滤波器h的长度。
;n为滤波器h的长度。
(3)生成变换矩阵H。
 (12)
(12)
式中, ;
; 表示向上取整函数。
表示向上取整函数。
(4)重写式(10)为
 (13)
(13)
(5)计算信号包络A。
 (14)
(14)
(6)将包络信号转换为图像。为减少专家经验,采用文献[20]提出的信号转图像方法。设获得的图像大小为N×N,N由信号的长度L决定,有
 (15)
(15)
式中, 表示向下取整函数。
表示向下取整函数。
图像可由式(16)得到。

 (16)
(16)
式中, 为生成的图像;
为生成的图像; 和
和 分别表示取最大值和最小值;
分别表示取最大值和最小值; 表示四舍五入。
表示四舍五入。
图像数据点被归一化为0~255之间的整数,以符合图像的有效像素强度范围。图1展示了
 时的信号预处理流程。图2展示了不同转子断条故障时电流信号生成的图像,在未采用HT去除电源分量之前,直接使用信号转换图像方法获取的图像中,电源分量占据了主导地位,导致故障特征不显著。经过HT处理之后,电源分量得到有效剔除,图像中包含了更丰富的细节信息,不同故障的特征更为易于辨识。
时的信号预处理流程。图2展示了不同转子断条故障时电流信号生成的图像,在未采用HT去除电源分量之前,直接使用信号转换图像方法获取的图像中,电源分量占据了主导地位,导致故障特征不显著。经过HT处理之后,电源分量得到有效剔除,图像中包含了更丰富的细节信息,不同故障的特征更为易于辨识。
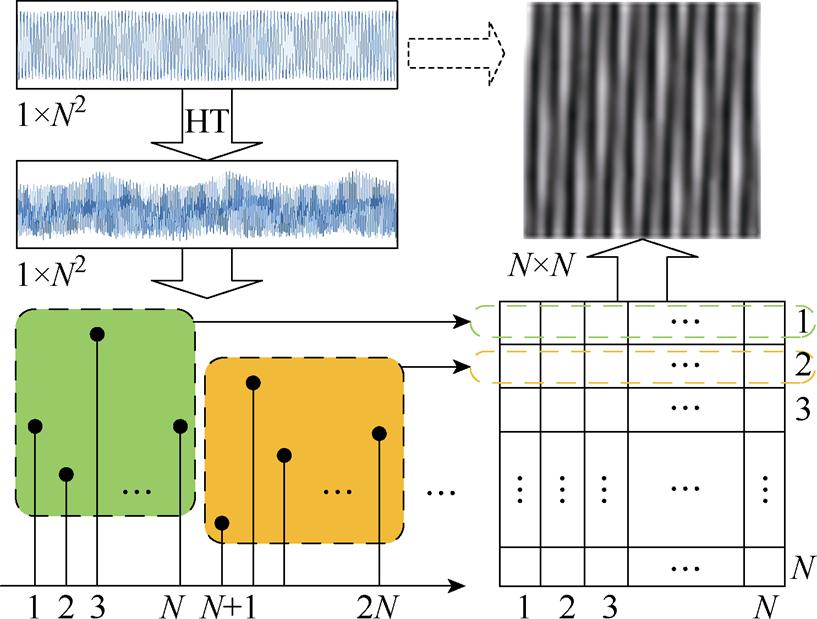
图1 数据预处理流程
Fig.1 Data preprocessing process
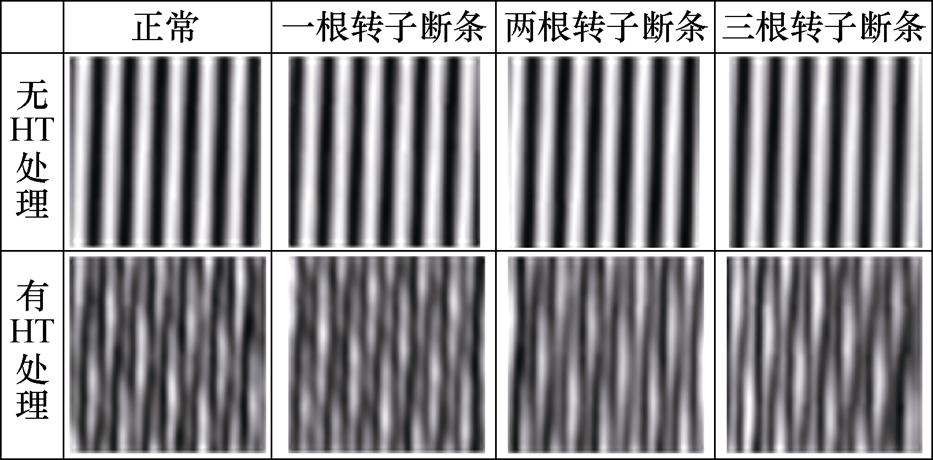
图2 HT处理前后对比
Fig.2 Comparison of before and after HT
CNN是受生物学上感受野(Receptive Field, RF)机制的启发而提出的,具有局部连接、权重共享、平移不变等特性[28],能够有效提取图像的特征信息,常用于解决图像分类问题,在电机故障诊断领域得到广泛应用。CNN通常包括卷积层、池化层和全连接层。传统的卷积层中仅包含尺寸相同的卷积核,提取单一尺度特征。牵引电机具有大范围的供电频率,不同故障频率的信号预处理生成的图像尺度不同。因此,本文采用多尺度卷积提取不同尺度的特征,并引入ECA对多尺度特征进行加权融合,提出了注意力融合的多尺度特征提取模块。传统多尺度卷积提取的特征在通道维度堆叠获得输出,具有相同的输出权重。但实际上,不同尺度或不同通道的特征对分类目标的贡献存在差异。引入ECA可捕捉不同通道间的依赖关系,动态调整不同通道的权重,从而增强不同通道特征的融合效果。在此基础上,设计MSFFCNN用于牵引电机的转子断条故障诊断,各模块原理介绍如下。
多尺度卷积神经网络在一个卷积层中使用不同尺寸的卷积核,即卷积核K的尺寸不同,如同时使用1×1、3×3、5×5的卷积核,提取多尺度特征。在CNN训练过程中,为降低网络对超参数的敏感程度,提升网络训练效果和收敛速度,通常在非线性激活之前,采用批归一化(Batch Normalization, BN)技术[29]。
2.1.1 卷积层
卷积层的作用是提取一个局部区域的特征,不同的卷积核相当于不同的特征提取器,计算为
 (17)
(17)
式中, 为第l+1层第i个卷积核生成的特征映射;
为第l+1层第i个卷积核生成的特征映射; 和
和 分别为第l+1层第i个卷积核的权重和偏置;f(·)为非线性激活函数。
分别为第l+1层第i个卷积核的权重和偏置;f(·)为非线性激活函数。
常用的激活函数有修正线性单元(Rectified Linear Unit, ReLU)、带泄露的修正线性单元(Leaky Rectified Linear Unit, LReLU)、Sigmoid函数。对于输入数据y,各激活函数输出计算为
 (18)
(18)
 (19)
(19)
 (20)
(20)
ReLU激活只需要进行比较的操作,计算高效,最为常用。 >0时导数为1,可以缓解梯度消失的问题,但<0时导数为0,未被激活的神经元参数梯度永远为0,无法再被激活。LReLU在输入<0时,保持一个较小的梯度
>0时导数为1,可以缓解梯度消失的问题,但<0时导数为0,未被激活的神经元参数梯度永远为0,无法再被激活。LReLU在输入<0时,保持一个较小的梯度 ,避免一些神经元永远不能被激活的问题。Sigmoid函数具有两端饱和的特点,输出被压缩在0~1之间。
,避免一些神经元永远不能被激活的问题。Sigmoid函数具有两端饱和的特点,输出被压缩在0~1之间。
2.1.2 BN层
BN使用数据的均值和方差对输入数据进行缩放和平移,使数据映射到同一分布。对于某批量数据 ,
, ,其中,p为批次大小,其BN定义为
,其中,p为批次大小,其BN定义为
 (21)
(21)
式中, 为经BN标准化后的输出;
为经BN标准化后的输出; 为一微小正数,避免分母为0的情况;
为一微小正数,避免分母为0的情况; 和
和 分别为数据的缩放和平移参数。
分别为数据的缩放和平移参数。
2.1.3 池化层
池化层也称为子采样层,对每个区域进行下采样得到一个值,作为这个区域的概括。作用是进行特征选择,降低特征数量,从而减少参数数量。常用的池化方法有最大池化和平均池化,计算为
 (22)
(22)
 (23)
(23)
式中,a为进行池化的区域;池化参数Wa和Ha分别为待池化区域a的宽和高; 表示区域a中第w行h列的值。
表示区域a中第w行h列的值。
2.1.4 全连接层
全连接层通常用于输出,将网络提取的特征映射到输出空间。执行分类任务时,使用全连接将输出维度降至与类别数一致,然后使用Softmax函数获得每个类别的预测概率。设输入向量为z,其长度与类别数相同,使用Softmax函数获得的概率输出为
 (24)
(24)
式中,sm为第m个类别的输出概率;zm为输入向量z的第m个元素;M为向量元素个数,即类别数。
一般来说,CNN网络越深,获得的特征就越复杂,表现也就越好。但实际中,随着深度的增加,CNN的识别精度会逐渐饱和甚至下降[30]。过深的网络还可能遇到梯度消失、梯度爆炸等问题。残差连接通过给卷积层增加直连边的方式来提高信息的传播效率,允许梯度直接从网络的后面层传递到前面层,有效缓解了梯度消失问题,对于输入的特征X,其输出定义为
 (25)
(25)
式中,Y为输出特征;F(X)为学习的残差函数。
注意力机制[31]借鉴于人脑的注意力机制,只选择关注其中某些关键的信息进行处理,提高神经网络的效率。其中,通道注意力机制用于CNN中特征映射通道的重要性分配。ECA是一种高效的通道注意力机制,仅使用少量的参数,获得有效的通道权重,有助于模型更好地关注与故障相关的特征通道,提升模型的精度和泛化能力[26]。
在卷积神经网络中,每个通道通常对应不同的特征提取器,提取到不同的特征,但通道数的增多不可避免地出现多个通道信息的冗余或互补,ECA通过对每个通道全局信息的描述向量的卷积,捕捉不同通道间的依赖关系,动态调整不同通道的权重,从而增强不同通道特征的融合效果。ECA模块的原理如图3所示,对于输入特征映射X,ECA的实现包括以下几个步骤:
(1)全局平均池化。通过对输入特征映射X的每个通道进行全局平均池化,得到表征每个通道全局信息的描述向量。
(2)卷积和激活。使用一维卷积捕捉局部跨通道交互信息,并使用Sigmoid激活限定权重范围。
(3)特征增强。将权重 与原特征映射逐通道相乘,增强重要通道的响应。
与原特征映射逐通道相乘,增强重要通道的响应。
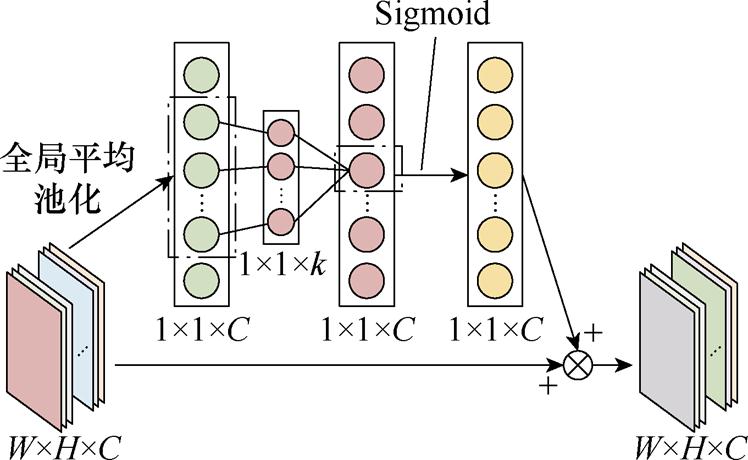
图3 ECA模块原理
Fig.3 Schematic diagram of the ECA module
权重计算式为
 (26)
(26)
式中,AvgPool(·)表示平均池化;Conv1dk(·)表示卷积核大小为k的一维卷积。
提出注意力融合的多尺度特征提取模块如图4所示,图中长方体外部数字为通道数,内部数字为卷积核大小。首先通过多个不同尺寸的卷积核提取特征,然后使用ECA机制对多尺度特征进行加权融合,为提高网络训练速度,防止梯度消失和过拟合,在模块中引入残差连接。
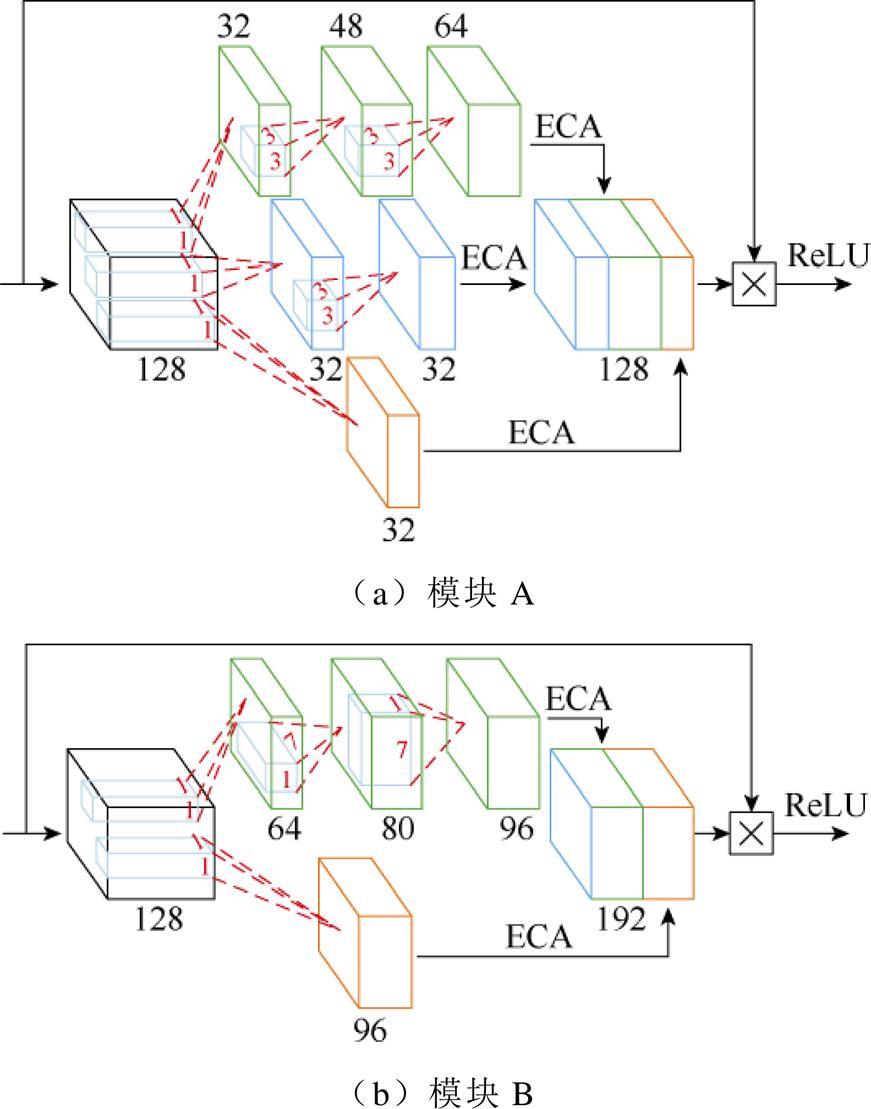
图4 注意力融合的多尺度特征提取模块
Fig.4 Multi-scale feature extraction module with attention fusion
所提特征提取模块有A、B两个类型,为实现等维卷积,方便不同尺度卷积提取的特征能够拼接,选择奇数的卷积核。本文输入特征尺寸为32×32,为实现多种尺度的特征提取,模块A选择卷积核尺寸为1×1,3×3,5×5。为综合全局的信息,实现故障分类,模块B采用较大的卷积核尺寸7×7,并结合尺寸为1×1卷积保留原始信息。为节约计算资源和减少参数数量,将5×5卷积使用两层3×3卷积实现,7×7卷积使用连续的1×7和7×1卷积实现。借鉴Inception模块[32],在进行卷积操作前,使用1×1卷积,减少参数的同时,增加网络等效层数。对于每一种尺度卷积核提取的特征映射,均通过ECA融合后,再进行通道维度的拼接。如图4a中通过两层3×3卷积提取特征后,得到64通道的特征映射,通过ECA捕捉特征映射通道间的依赖关系,增强重要通道的响应,再对每个增强后的特征映射进行拼接,实现多尺度的特征融合,提升特征提取效果。最后经过残差连接,若输入和输出通道数不同,对输入做一次1×1卷积以匹配输出通道。
基于提出的多尺度特征提取模块,设计MSFFCNN,具体参数见表1。MSFFCNN以预处理得到的图像为输入,提取不同尺度的特征信息,实现转子断条故障诊断。首先通过两层卷积层扩充特征通道,初步提取特征,并使用LReLU激活代替ReLU激活,防止某些神经元永远不会被激活而丢失信息。然后使用多尺度特征提取模块A和模块B提取多尺度融合特征。中间采用一次最大池化,保留重要信息,降低特征维度,以减少参数和防止过拟合。为提高训练效率,在每次激活之前,对训练的小批量样本进行BN。最后使用全局平均池化对特征进行降维,得到一组特征向量,使用全连接将特征向量转换为类别得分,经Softmax转换为概率分布,获得最终的预测结果。基于MSFFCNN的转子断条故障诊断方法如图5所示,诊断流程主要包括以下四个步骤:
(1)数据预处理。首先将采集的电流信号通过矩形窗截断,获得固定长度的信号,采用HT获得电流信号包络,然后转换为图像,构建数据集。
(2)数据集划分。将数据集按一定比例划分为训练集、验证集和测试集,用于训练和测试网络模型。
(3)网络训练和调整。使用训练集数据训练网络,并使用验证集验证网络效果,根据验证集诊断效果调整网络模型和参数,直至得到最佳的验证集性能。
(4)网络测试。保存验证集效果最好的网络参数,使用测试集数据测试网络的诊断效果。
表1 网络参数设置
Tab.1 Network parameter setting
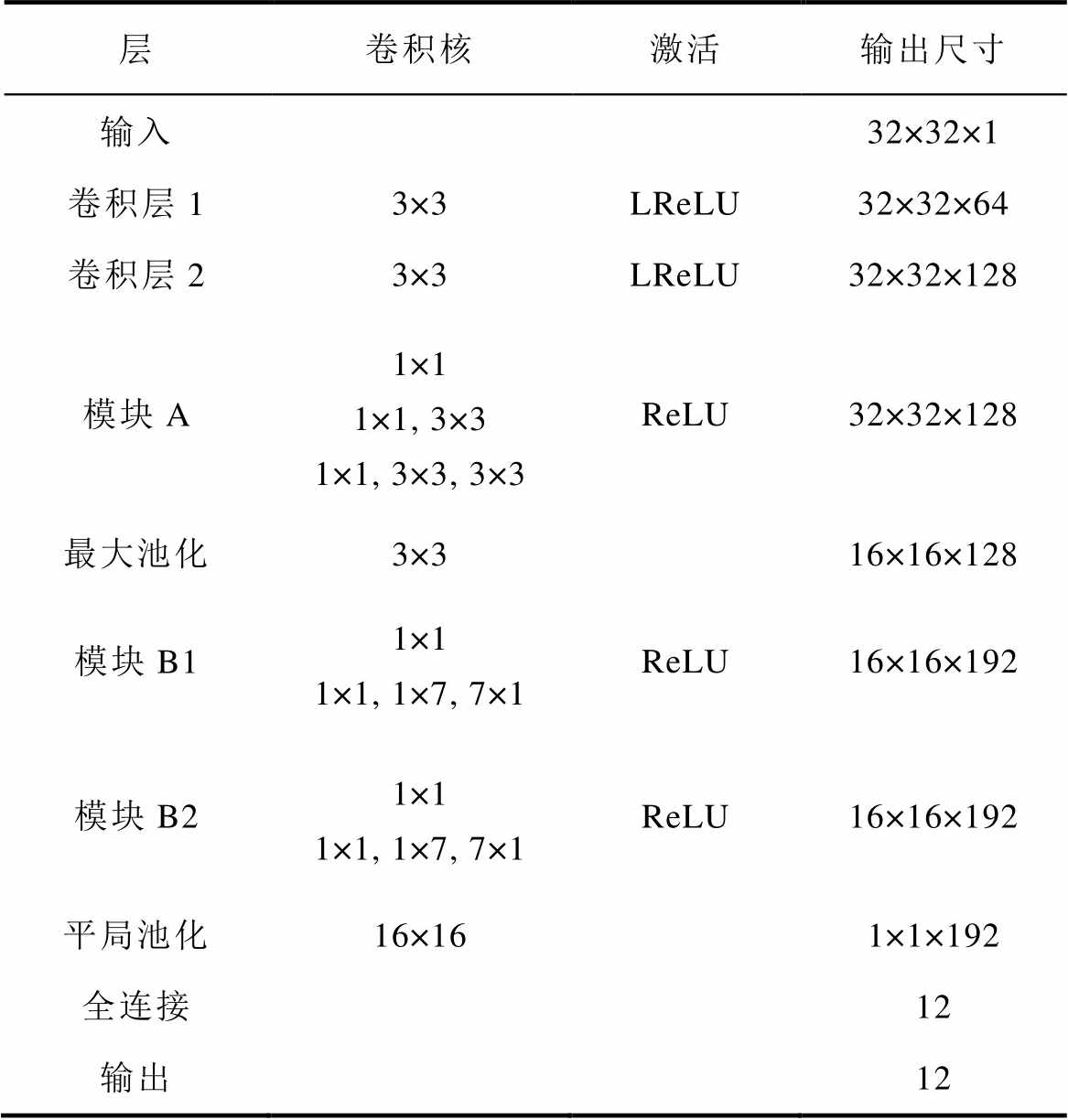
层卷积核激活输出尺寸 输入32×32×1 卷积层13×3LReLU32×32×64 卷积层23×3LReLU32×32×128 模块A1×1 1×1, 3×3 1×1, 3×3, 3×3ReLU32×32×128 最大池化3×316×16×128 模块B11×1 1×1, 1×7, 7×1ReLU16×16×192 模块B21×1 1×1, 1×7, 7×1ReLU16×16×192 平局池化16×161×1×192 全连接12 输出12
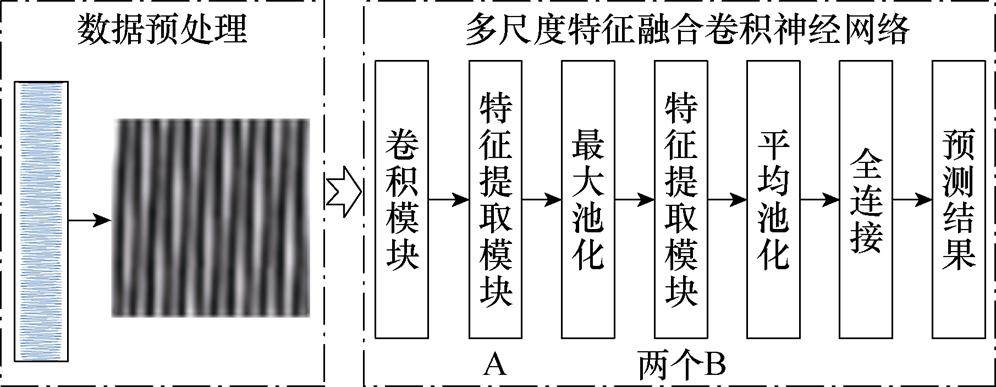
图5 基于MSFFCNN的转子断条故障诊断方法
Fig.5 Broken rotor bar fault diagnosis based on MSFFCNN
为验证所提方法对转子断条故障诊断的有效性,使用巴西圣保罗大学的转子断条数据集[33]和实验室采集的数据进行验证。
3.1.1 公开数据集介绍
公开数据集实验电机参数见表2,提供了不同负载转矩下,不同断条数目的故障电流数据,以50 kHz采样频率采集三相电流20 s,共计1 000 000个数据点,每次实验重复进行10次。实际监测过程中受限于存储空间,电流采样频率不会过高。因此对数据进行5倍下采样,即等效采样频率为10 kHz。图6为不同转子故障程度的三相电流波形。可以看到,故障时的三相电流变化并无明显差异,通过任一相电流即可进行故障诊断。为减少数据存储和计算资源消耗,利于在线监测,本文所提方法仅使用单相电流,后续处理均使用A相电流。选取连续1 024个采样点作为一个样本,经预处理生成32×32大小的图像。数据集标签设置见表3,由于轻载时的故障难以发现,负载转矩T分别选取0.5、1.5、2.5 N·m,分别与四种故障程度结合,故障程度由转子断条的数目决定,共计12种类别。每类故障选取200个样本,共生成2 400张图像。
表2 实验用电机参数
Tab.2 Parameters of motor used for the experiment
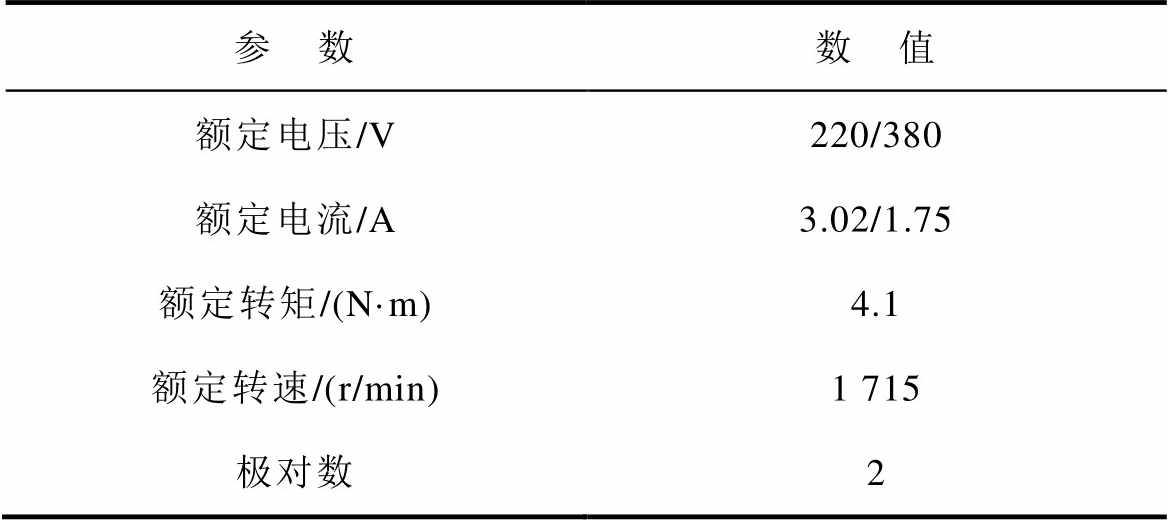
参 数数 值 额定电压/V220/380 额定电流/A3.02/1.75 额定转矩/(N·m)4.1 额定转速/(r/min)1 715 极对数2
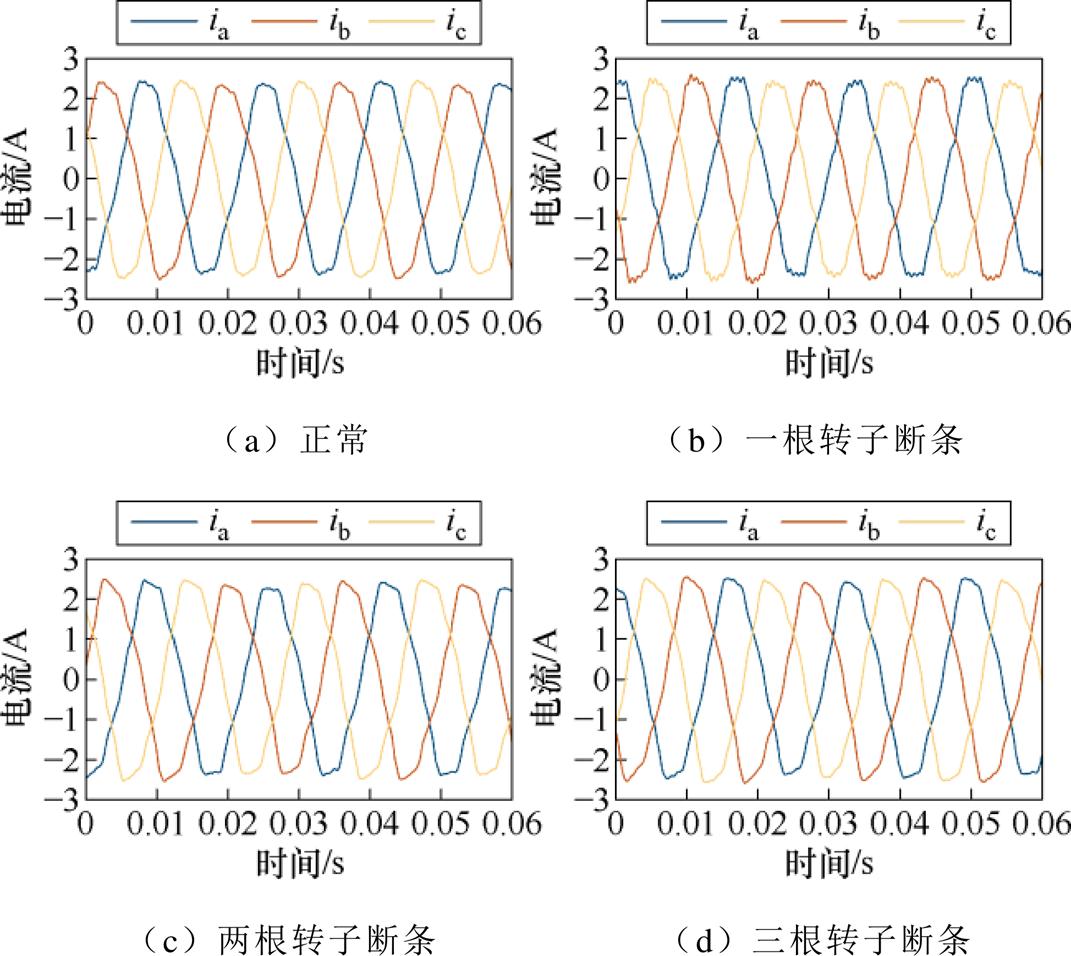
图6 不同程度转子断条故障的电流波形
Fig.6 Current waveforms of different degrees of broken rotor bar
表3 公开数据集标签
Tab.3 Label of public datasets
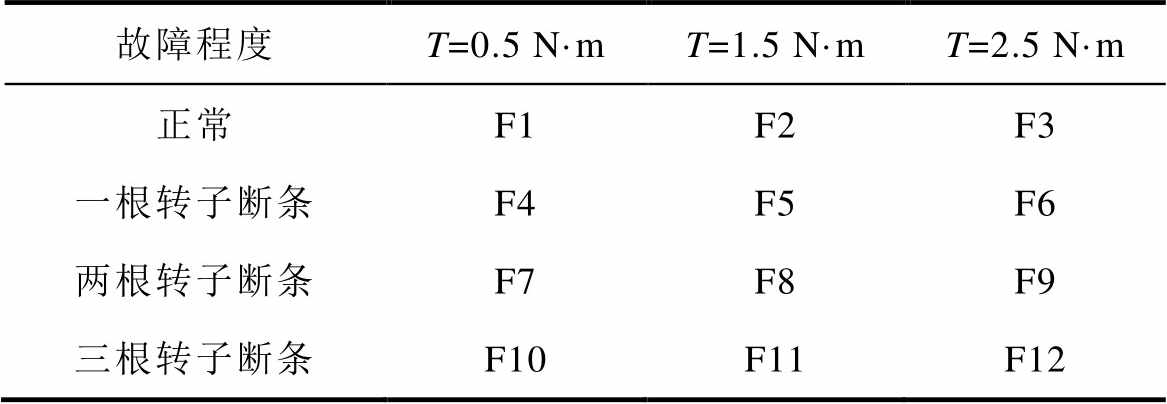
故障程度T=0.5 N·mT=1.5 N·mT=2.5 N·m 正常F1F2F3 一根转子断条F4F5F6 两根转子断条F7F8F9 三根转子断条F10F11F12
3.1.2 实验室数据集介绍
实验室数据集从一台异步电机上采集,一个正常转子、三个故障转子替换获得不同状态转子数据。实验平台如图7所示,电机额定频率为50 Hz,为验证方法在不同频率下的性能,选择等间隔的三个频率即15、30、45 Hz实验。出于安全性考虑,并未进行50 Hz即额定转速下的实验。以5 kHz采样频率采集10 s定子电流数据,重复10次。抽取连续1 024个点进行预处理,生成32×32大小的图像。数据集标签设置见表4,三种供电频率结合四种故障程度,共计12种类别。每个类别选取200个样本,共生成2 400张图像。
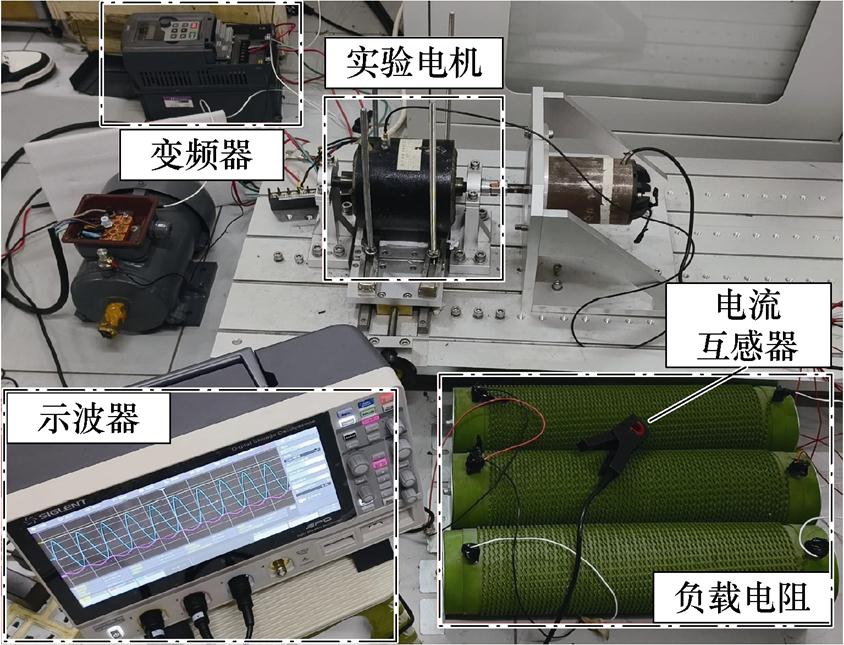
图7 电机实验平台
Fig.7 Experiment platform for motor
表4 实验室数据集标签
Tab.4 Label of laboratorydatasets
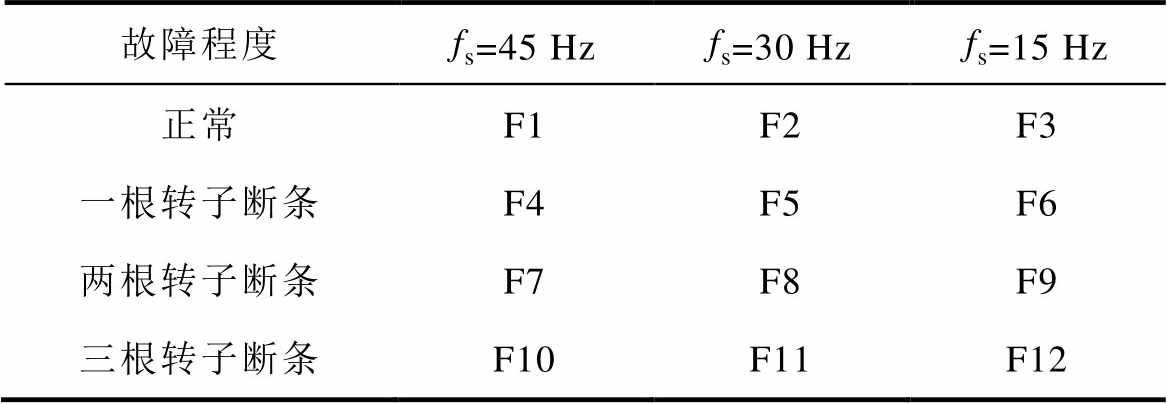
故障程度fs=45 Hzfs=30 Hzfs=15 Hz 正常F1F2F3 一根转子断条F4F5F6 两根转子断条F7F8F9 三根转子断条F10F11F12
3.1.3 模型训练设置和评价指标
为评估模型对样本数量变化的敏感度以及泛化能力,设置训练集比例分别为20%、40%、60%,固定20%为验证集,其余部分全部作为测试集。模型的超参数是根据领域内的实践经验,以及初步的实验验证而获得的,综合考虑设备的硬件资源、训练稳定性、收敛速度等因素,选择批量大小为32,初始学习率为0.000 5,每10个训练轮次(epoch)下降为原来的一半。这样设置的递减学习率有助于模型在前期快速收敛,后期精细调整。模型优化策略选择Adam优化器,该优化器具有学习效率高、内存需求少、自适应学习率等优点[27],为常用的优化器。所有实验均在同一台计算机上进行,采用6核AMD Ryzen 5 4600H CPU和NVIDIA Geforce GTX1650显卡。所有实验均进行10次,取平均值作为最终的分类结果,以避免实验过程中的偶然性。采用准确率和宏平均F1分数评价方法的性能,计算方式见表5。表中,M为类别数,TPm、FPm、FNm分别为第m类的真正例、假正例、假负例。指标越高,表明模型效果越好。
表5 评价指标
Tab.5 Evaluation metrics
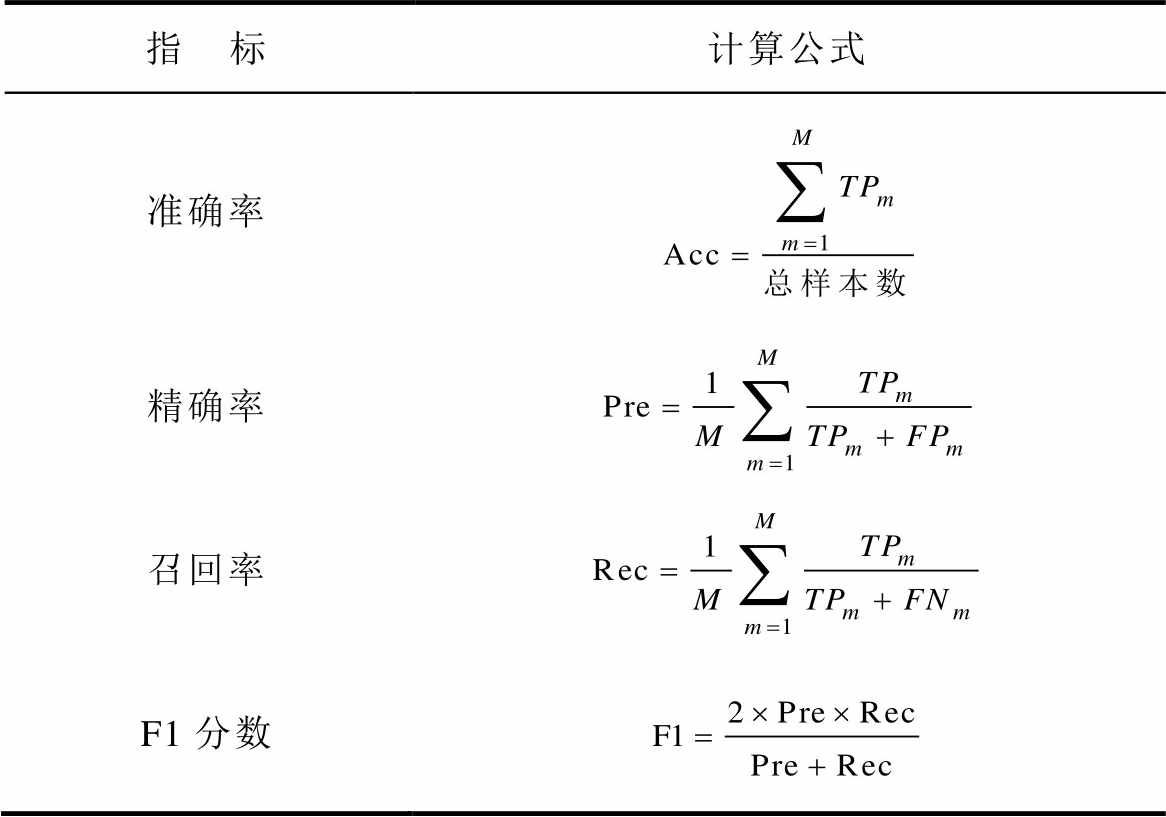
指 标计算公式 准确率 精确率 召回率 F1分数
3.2.1 预处理步骤和ECA模块的有效性
为验证本文所提预处理步骤和ECA模块融合的有效性,通过删除相应处理步骤或模块进行消融实验,来验证其有效性。使用公开数据集进行实验,结果见表6。表中,HT表示信号预处理步骤中通过HT实现的包络计算,ECA为本文在多尺度网络中融合的通道注意力机制。
在所有设置的训练集比例下,MSFFCNN均得到了最高的准确率和F1分数。与不使用HT进行预处理时对比,训练比例分别为20%、40%、60%时,准确率分别提升了13.37%、1.40%、0.80%。与不使用ECA机制相比,所提模型在训练比例分别为20%、40%、60%时,准确率分别提升了0.69%、0.62%、0.15%。在训练集比例为20%和40%时,准确率提升明显。而在训练集比例为60%时,准确率和F1分数提升不大。但所有结果的标准误差有所减小,结果更稳定,模型泛化能力有所增强。ECA通过对特征映射进行加权,使得重要特征拥有较高的权重,能够充分运用提取到的特征来提升网络分类效果。在训练集比例较小,即特征提取困难时,凸显了重要特征增加权重的作用,效果提升明显。在训练集比例较大时,特征提取较为容易,效果提升不大,对关键特征加权使得网络能够稳定获得关键信息,模型泛化能力增强。
表6 消融实验结果
Tab.6 Result of ablation experiment
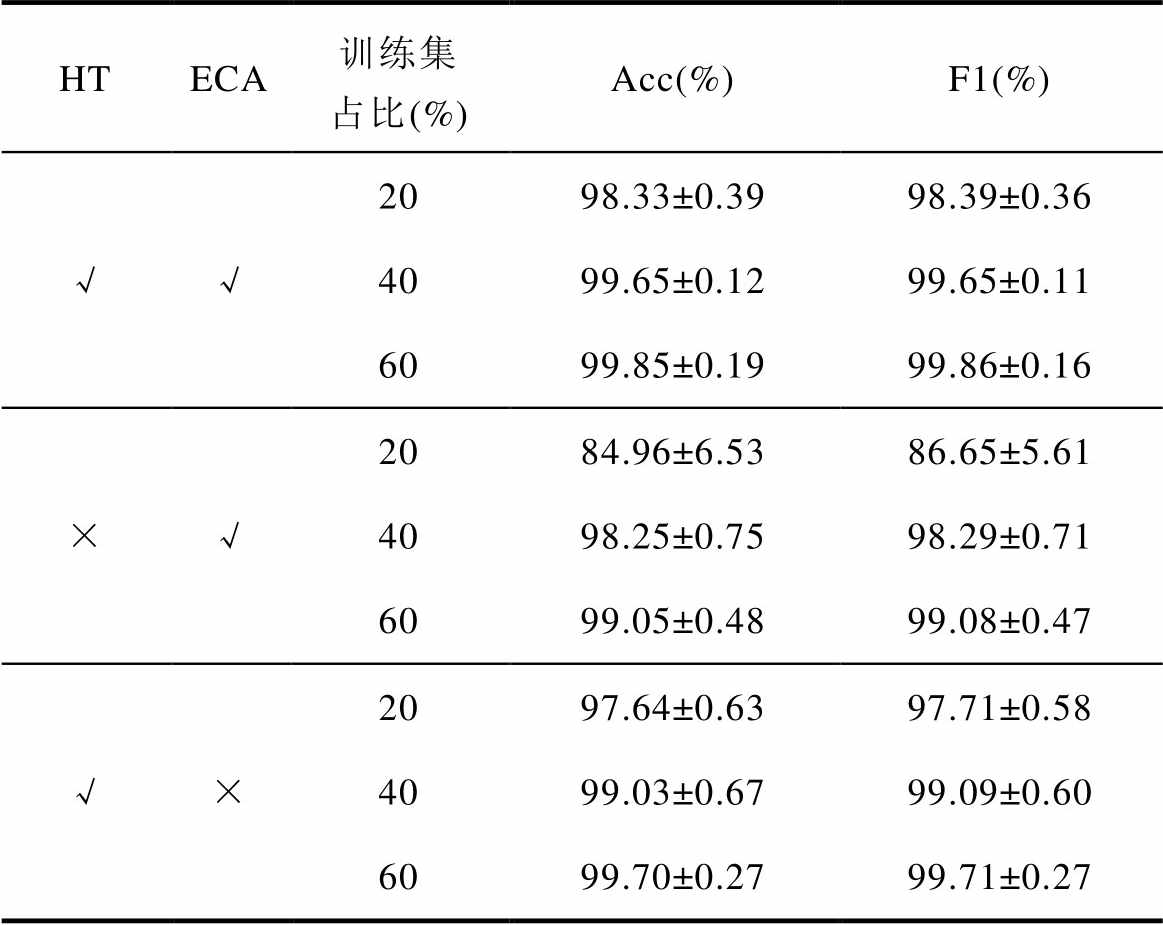
HTECA训练集占比(%)Acc(%)F1(%) √√2098.33±0.3998.39±0.36 4099.65±0.1299.65±0.11 6099.85±0.1999.86±0.16 ×√2084.96±6.5386.65±5.61 4098.25±0.7598.29±0.71 6099.05±0.4899.08±0.47 √×2097.64±0.6397.71±0.58 4099.03±0.6799.09±0.60 6099.70±0.2799.71±0.27
注:“√”表示有此步骤,“×”表示无此步骤。
3.2.2 多尺度卷积的有效性
为验证多尺度卷积的有效性,将某一尺度的卷积替换为其他尺度卷积,进行实验,对比不同卷积核对诊断效果的影响,如图8所示,横坐标表示卷积核的尺寸,如A5B17表示模块A使用5×5卷积,模块B使用1×1和7×7卷积,A135B17即为本文方法。可以看到,使用本文所用的卷积核尺寸组合,获得了最高的诊断准确率,并且结果波动较小。而剔除或更改某一卷积核将导致准确率下降,说明了本文多尺度卷积的有效性。
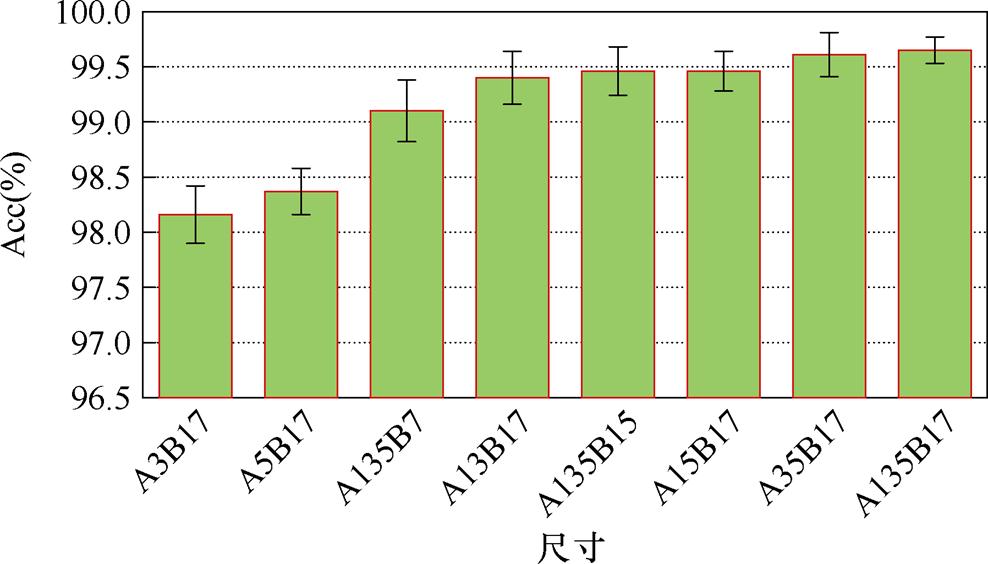
图8 不同多尺度卷积网络的诊断效果对比
Fig.8 Comparison of diagnostic effects of different multi-scale convolutional networks
消融实验表明,HT预处理消除了电源频率分量的影响,特征得到增强,模型能够更容易提取到有效特征,在小样本下实现较高的分类精度。基于ECA融合的多尺度特征提取模块,能够实现自动提取关键特征,充分利用训练集样本,提升诊断精度和泛化性能。不同多尺度卷积核均对最终的诊断结果有所帮助,能够提升网络的诊断性能。
为验证所提算法在转子断条故障诊断中的优势,将其与现有的相关方法进行比较。包括经典的深度CNN(Deep CNN, DCNN)、残差CNN(Resdiual CNN, ResCNN)、改进的具有残差学习的CNN(Improved CNN with Residual learning, Imp- ResCNN)[23]、残差多尺度特征融合CNN(Residual Multi-scale Feature Fusion CNN, RMFFCNN)[25]。
DCNN由经典的卷积层、池化层、激活层堆叠而成,分类结果由全连接输出。本文使用3×3卷积和2×2最大池化堆叠,构建与本文网络层数相当的网络。ResCNN参照ResNet网络[30],构建与本文网络层数相当的网络。Imp-ResCNN在传统CNN上进行了改进,如融合残差连接、加入BN、使用LReLU来代替ReLU。RMFFCNN采用多层多尺度卷积提取特征,同样具有残差连接。Imp-ResCNN和RMFFCNN均使用原文献[23, 25]参数。
3.3.1 公开数据集对比实验结果及分析
表7为五种模型在公开数据集上准确率和F1分数的比较。DCNN网络由于多层卷积池化的简单堆叠,特征在层间传输效率不高,诊断准确率并不高。ResCNN通过残差连接,特征能够直接传输到较深的层,增强了前后层的联系,准确率较DCNN有所提升。Imp-ResCNN在训练集占比为60%时,诊断准确率几乎与MSFFCNN相同,训练集占比为20%和40%时略低于MSFFCNN。RMFFCNN全部采用多尺度卷积,直接拼接提取的多尺度特征,由于没有考虑不同尺度特征的重要性,效果不如所提网络,在训练集占比为20%时,出现了严重的过拟合。MSFFCNN综合考虑多尺度特征提取和残差连接,并且利用注意力机制筛选重要特征,获得了最好的诊断效果。训练集占比为60%时,模型平均准确率和F1分数分别达到99.85%和99.86%。在训练集占比在20%时,准确率和F1分数仍保持在98%以上,其他网络出现较严重的过拟合或性能退化。与其他方法相比,MSFFCNN能够在不同负载下实现有效的特征提取,诊断准确率较高。
表7 对比实验结果(公开数据集)
Tab.7 Result of compare experiment (public datasets)
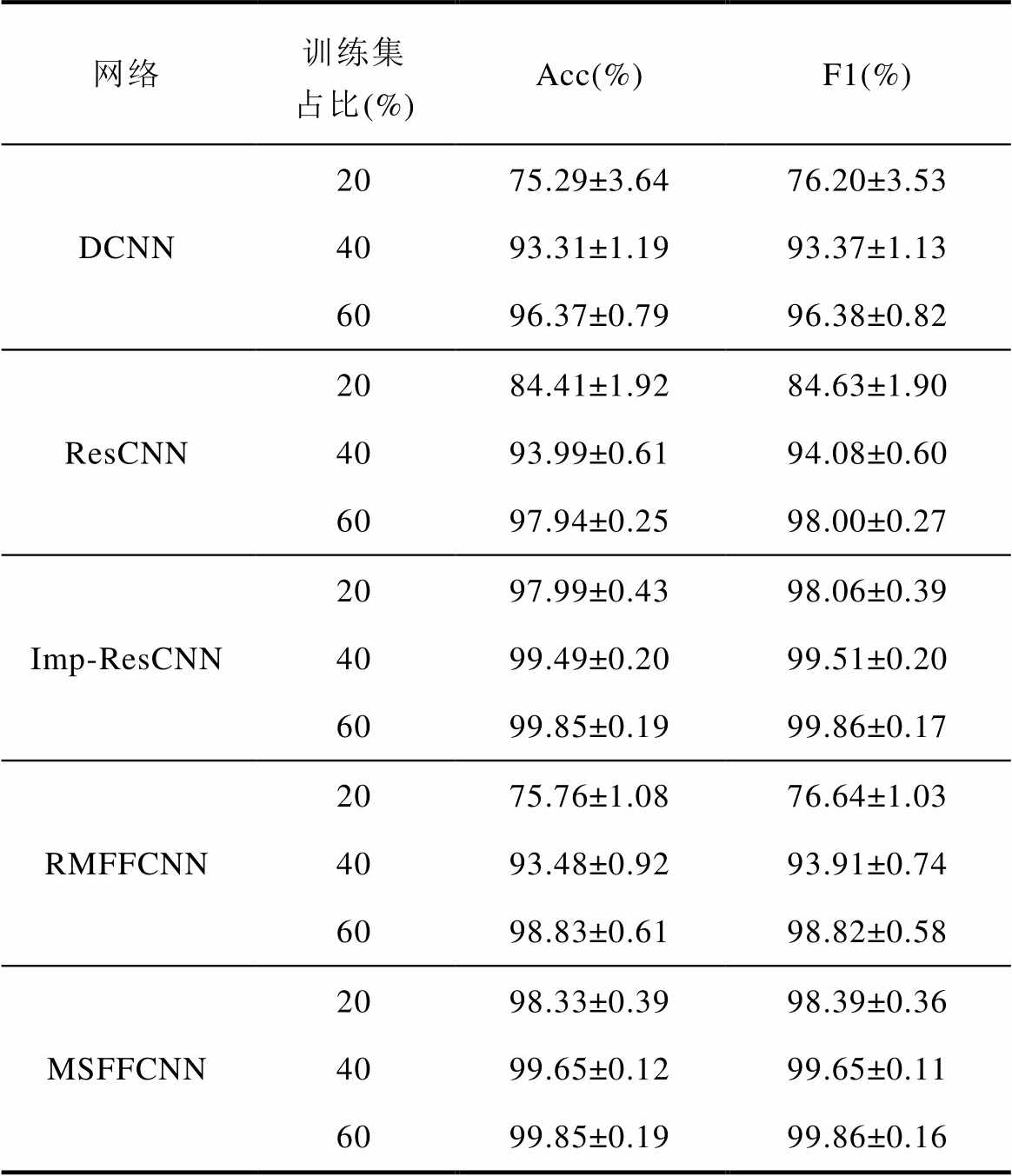
网络训练集占比(%)Acc(%)F1(%) DCNN2075.29±3.6476.20±3.53 4093.31±1.1993.37±1.13 6096.37±0.7996.38±0.82 ResCNN2084.41±1.9284.63±1.90 4093.99±0.6194.08±0.60 6097.94±0.2598.00±0.27 Imp-ResCNN2097.99±0.4398.06±0.39 4099.49±0.2099.51±0.20 6099.85±0.1999.86±0.17 RMFFCNN2075.76±1.0876.64±1.03 4093.48±0.9293.91±0.74 6098.83±0.6198.82±0.58 MSFFCNN2098.33±0.3998.39±0.36 4099.65±0.1299.65±0.11 6099.85±0.1999.86±0.16
图9展示了五种网络在训练集占比为40%时的训练过程验证集准确率的变化。可以看到,传统的DCNN和ResCNN方法收敛很慢,RMFFCNN能够很快收敛,但由于过拟合问题,验证集准确率保持在93%左右,而Imp-ResCNN和MSFFCNN均在40个epoch时达到训练效果,MSFFCNN验证集准确率略高于Imp-ResCNN。表8对比了不同网络在训练时间、单个样本测试时间、参数数量、浮点运算次数(Floating point Operations, FLOPs,常用来衡量模型的计算复杂度)四个方面的表现,可以看到,MSFFCNN在多项性能指标中展现出综合优势。在五种网络中,MSFFCNN参数数量和FLOPs均较低。在保持较高推理速度的同时,MSFFCNN通过多尺度特征融合和其他改进实现了参数数量与计算开销的优化平衡,更适用于资源受限的实时场景。
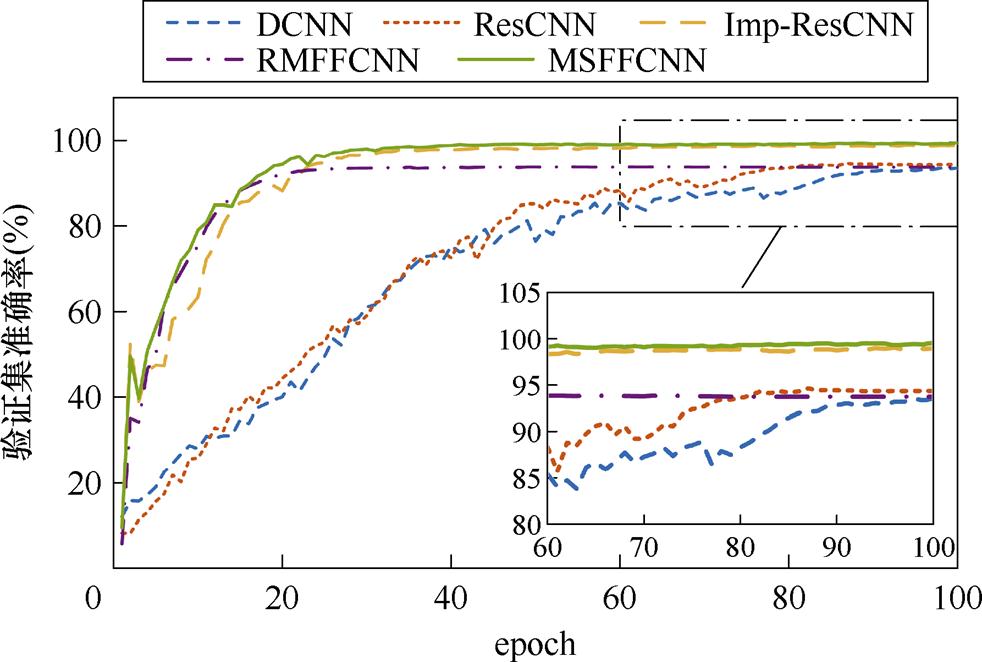
图9 不同网络训练过程中验证集准确率变化
Fig.9 The accuracy of verification set varies during different network training
表8 不同网络各方面性能对比
Tab.8 Performance comparison of different networks
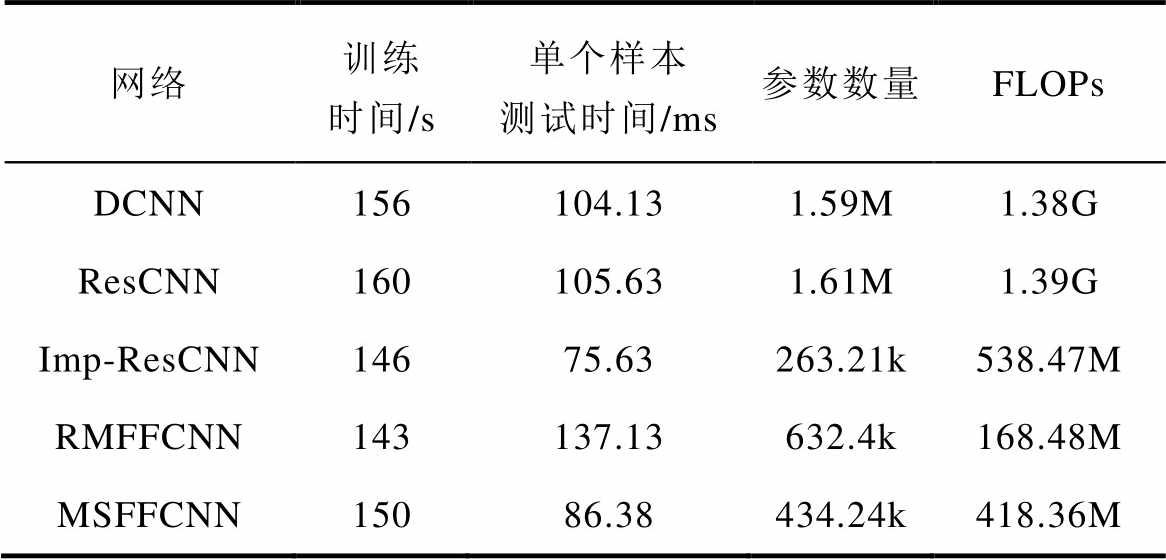
网络训练时间/s单个样本测试时间/ms参数数量FLOPs DCNN156104.131.59M1.38G ResCNN160105.631.61M1.39G Imp-ResCNN14675.63263.21k538.47M RMFFCNN143137.13632.4k168.48M MSFFCNN15086.38434.24k418.36M
为直观展示网络分类后的类间距离与类内距离,采用t分布随机邻域嵌入(t-distributed Stochastic Neighbor Embedding, t-SNE)进行可视化展示。t- SNE能够将高维数据映射到低维空间,同时保持数据之间的相对相似性。图10为五种网络在训练集占比为40%时的网络最后一层特征可视化结果。每个点代表一个测试集样本,同种颜色的点代表该样本具有同一类故障。可以看到,DCNN和ResCNN存在大量相互混淆的样本点,难以分辨同一负载下的不同故障程度。Imp-ResCNN和RMFFCNN能够区分大部分不同程度的故障,但仍存在一定的不同故障程度的样本混淆。如图10c中,F8和F11存在部分混淆,出现部分误判。MSFFCNN提取的不同故障类别样本的特征界限分明,能够减少误判,有效区分转子的状态。
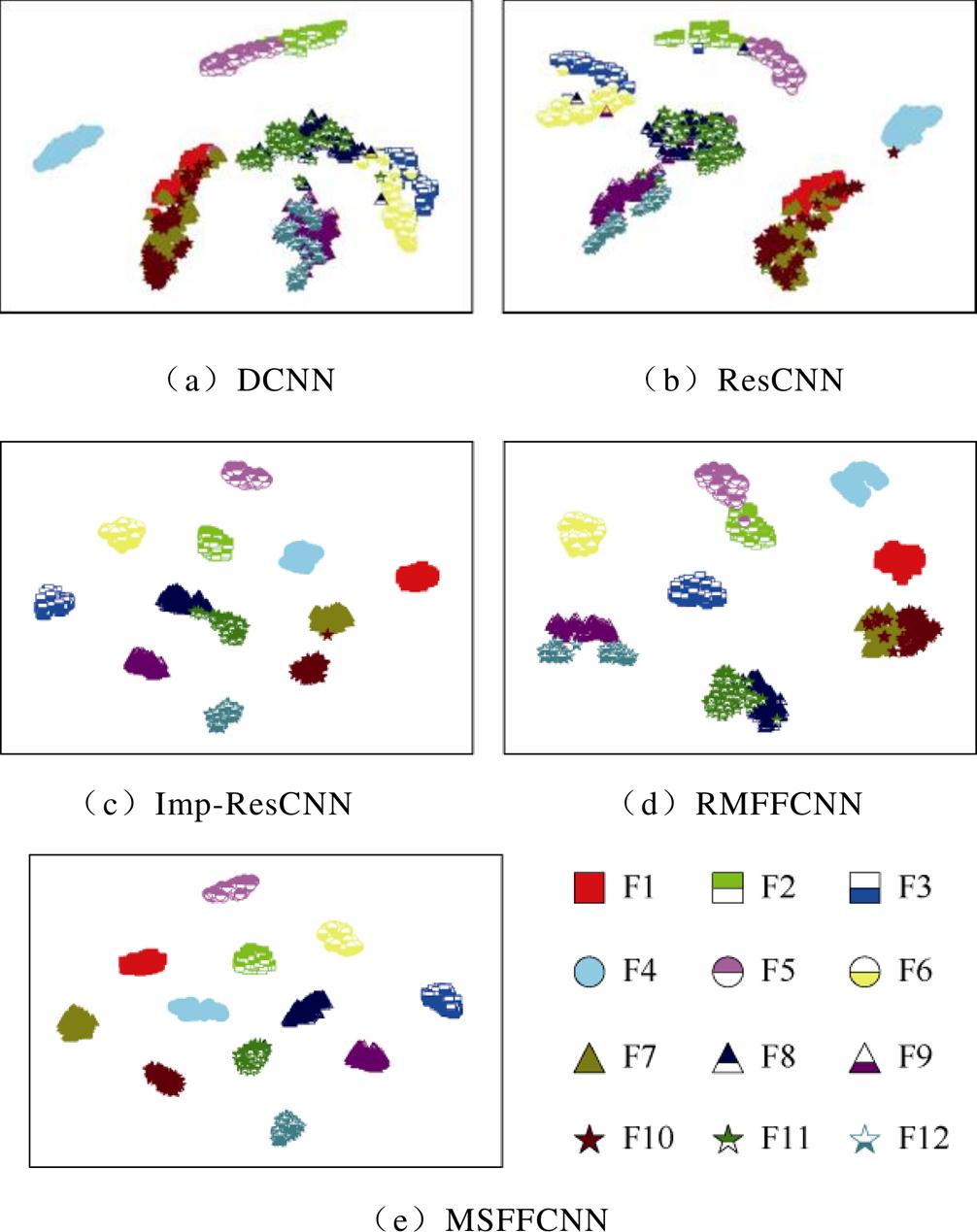
图10 各种方法特征可视化
Fig.10 Feature visualization of each method
公开数据集中的电流信号噪声含量较少,为模拟更真实的数据状态,验证模型对噪声的鲁棒性,在信号中手动添加高斯白噪声,信噪比(Signal-to- Noise Ratio, SNR)分别设置为40、35和30 dB。设置训练集占比为40%进行实验,结果见表9。SNR越高,诊断效果越好,随着SNR的降低,所有网络平均诊断准确率和F1分数均不同程度下降。在不同噪声环境下,相比其他模型,MSFFCNN拥有更好的性能。
表9 加噪实验结果
Tab.9 Result of experiment after adding noise
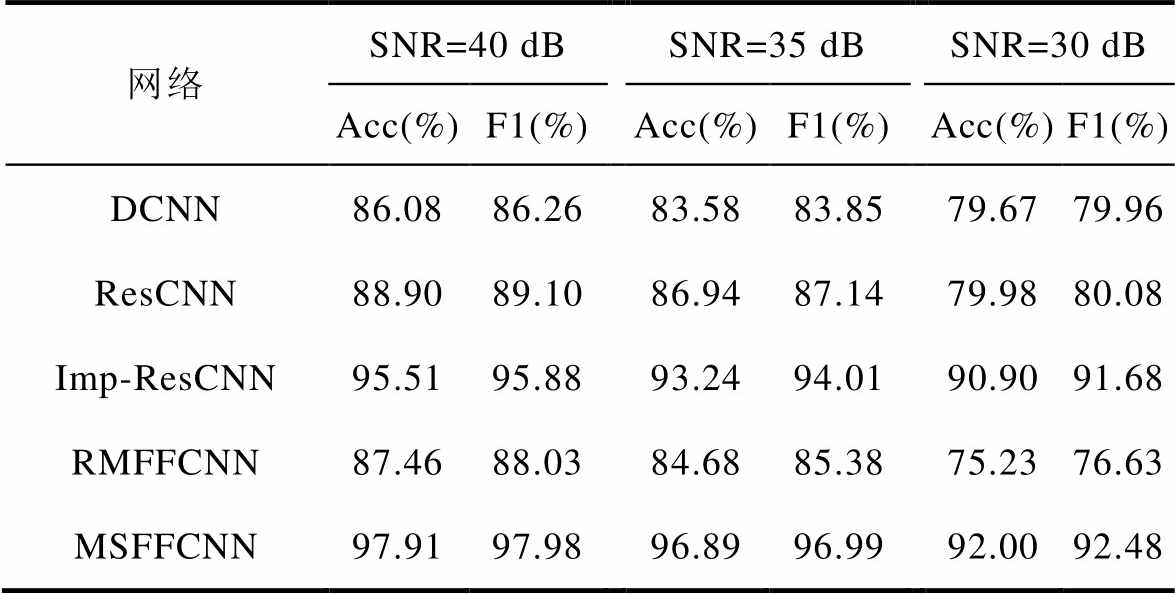
网络SNR=40 dBSNR=35 dBSNR=30 dB Acc(%)F1(%)Acc(%)F1(%)Acc(%)F1(%) DCNN86.0886.2683.5883.8579.6779.96 ResCNN88.9089.1086.9487.1479.9880.08 Imp-ResCNN95.5195.8893.2494.0190.9091.68 RMFFCNN87.4688.0384.6885.3875.2376.63 MSFFCNN97.9197.9896.8996.9992.0092.48
3.3.2 实验室数据集对比实验结果及分析
表10展示了五种模型在实验室数据集上准确率和F1分数。实验室数据集电流基频不同,特征尺度存在差异,相较于公开数据集的结果,提取单一尺度的Imp-ResCNN效果变差,提取多尺度特征的RMFFCNN效果有所改善,但仍存在过拟合问题。MSFFCNN表现出最高的准确率和F1分数,在训练集占比为60%时,模型平均准确率和F1分数分别达到了99.82%和99.80%。在不同的电源供电频率下,MSFFCNN能够适应特征尺度变化,有效提取特征,具有较高的诊断准确率。
为详细分析各类故障的分类情况,以训练集占比结果为40%时为代表,绘制分类结果的混淆矩阵。如图11所示,纵坐标和横坐标分别代表了故障的真实类别和预测类别。可以看出,MSFFCNN能够区分大部分故障,准确率可达到100%,仅有少量分类错误。其他模型则均存在较多的误分类,其中一根转子断条故障的误分类最多,且在电源频率较低时更为严重。这是由于一根转子断条的故障程度较轻,最易受到干扰而发生误分类。供电频率较低的诊断效果略差是由于当供电频率较低时,在相同的采样频率和采样点数下,包含的电流周期数越少,电流的时间尺度越大,从而使故障频率信息提取更困难,导致一定的误分类。本文采用注意力融合的多尺度特征提取模块进行特征提取,能够有效提取不同尺度特征,增强了特征的提取能力,因此MSFFCNN表现出更高的诊断准确率。
表10 对比实验结果(实验室数据集)
Tab.10 Result of compare experiment (laboratorydatasets)
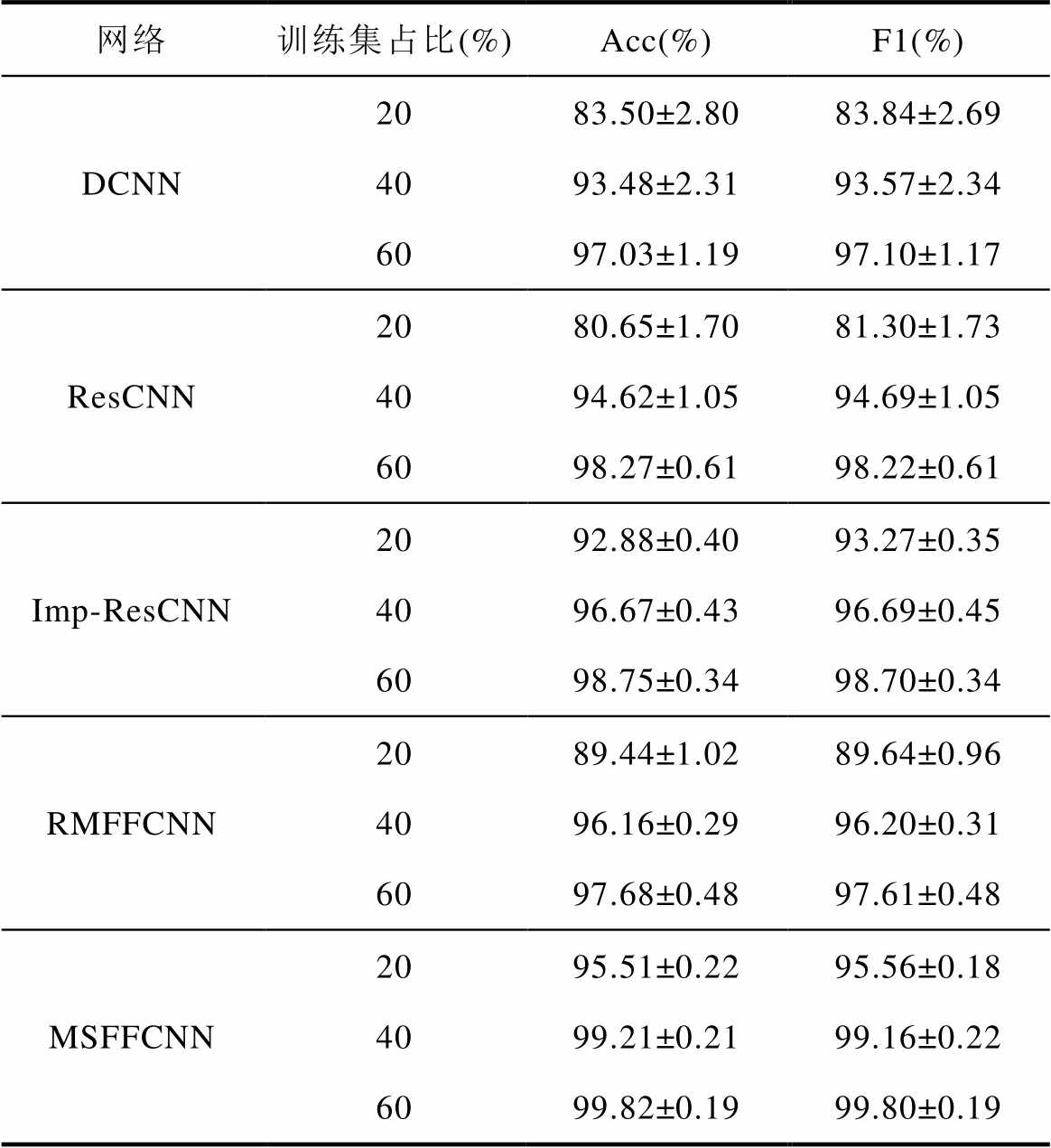
网络训练集占比(%)Acc(%)F1(%) DCNN2083.50±2.8083.84±2.69 4093.48±2.3193.57±2.34 6097.03±1.1997.10±1.17 ResCNN2080.65±1.7081.30±1.73 4094.62±1.0594.69±1.05 6098.27±0.6198.22±0.61 Imp-ResCNN2092.88±0.4093.27±0.35 4096.67±0.4396.69±0.45 6098.75±0.3498.70±0.34 RMFFCNN2089.44±1.0289.64±0.96 4096.16±0.2996.20±0.31 6097.68±0.4897.61±0.48 MSFFCNN2095.51±0.2295.56±0.18 4099.21±0.2199.16±0.22 6099.82±0.1999.80±0.19
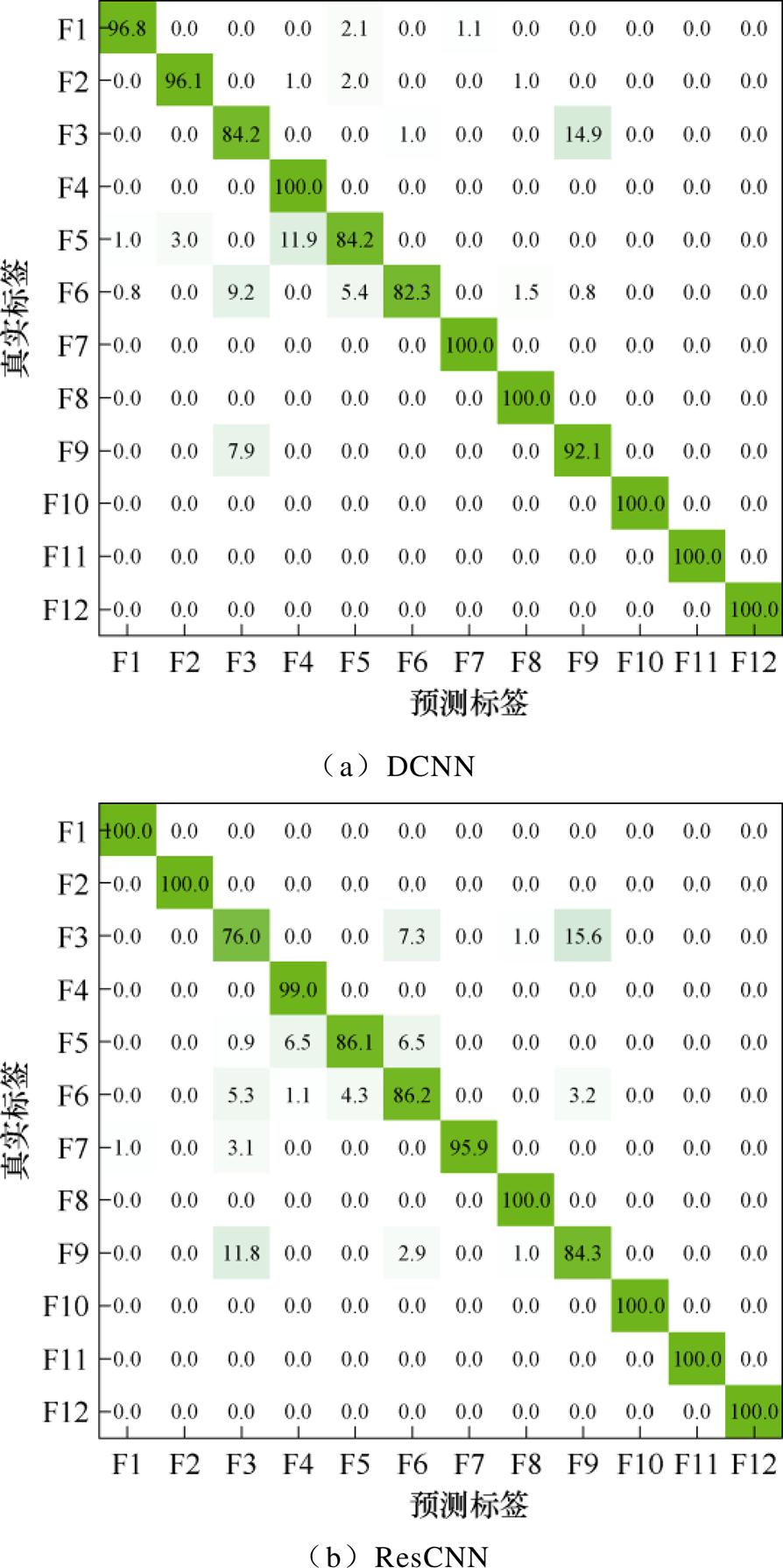

图11 各种方法分类结果的混淆矩阵
Fig.11 Confusion matrix of classification results of each method
本文以牵引电机转子断条故障诊断为目标,提出一种基于MSFFCNN的故障诊断方法。使用HT变换求得电流信号包络,并将包络信号转换为图像作为输入。用多尺度卷积代替传统的单一尺度,引入ECA对提取的多尺度特征加权融合,设计MSFFCNN用于牵引电机转子断条故障诊断。在两个转子断条故障数据集上进行验证,得到以下结论:
1)使用HT进行电流预处理,消除了电源频率分量的影响,转子断条故障特征得到增强,生成的图像中包含更多的细节信息,使得模型更容易提取有效的故障特征,提高诊断准确率。
2)通过ECA融合多尺度特征,使模型能够适应不同的负载和供电频率,自动实现有效特征提取,防止模型过拟合,提升模型诊断准确率和泛化性能。
3)与其他相关方法相比,本文所提模型具有诊断精度高、抗噪性能和泛化能力强的优点,能够有效识别不同负载和供电频率下的转子断条故障及严重程度。
本文所提方法仅使用单相定子电流实现了转子断条故障的诊断,识别不同负载或供电频率下的不同转子断条故障程度,更适用于牵引电机场合,能够为设定列车电机的维修计划提供参考,节约运维成本,保障列车运行安全。
参考文献
[1] 丁荣军, 宋文胜, 麻宸伟. 列车电力牵引系统控制与状态监测综述及展望[J]. 中国电机工程学报, 2024, 44(17): 6973-6991.
Ding Rongjun, Song Wensheng, Ma Chenwei. Overview and prospect of control and condition monitoring of train electric traction systems[J]. Proceedings of the CSEE, 2024, 44(17): 6973-6991.
[2] 《“复兴号”中国标准动车组》编委会. “复兴号”中国标准动车组(CR400型)[M]. 北京: 中国铁道出版社有限公司, 2012.
[3] 张大勇. 铁路交流牵引电机故障诊断技术研究及应用[J]. 中国铁路, 2021(5): 1-11.
Zhang Dayong. Research and application of fault diagnosis technology for railway AC traction motor[J]. China Railway, 2021(5): 1-11.
[4] Atta M E E, Ibrahim D K, Gilany M I. Broken bar fault detection and diagnosis techniques for induction motors and drives: state of the art[J]. IEEE Access, 2022, 10: 88504-88526.
[5] Bazghandi R, Hoseintabar M M, Abolghasemi V, et al. A novel mode un-mixing approach in variational mode decomposition for fault detection in wound rotor induction machines[J]. Energies, 2023, 16(14): 5551.
[6] Puche-Panadero R, Pineda-Sanchez M, Riera-Guasp M, et al. Improved resolution of the MCSA method via Hilbert transform, enabling the diagnosis of rotor asymmetries at very low slip[J]. IEEE Transactions on Energy Conversion, 2009, 24(1): 52-59.
[7] 夏志凌, 胡凯波, 刘心悦, 等. 基于变模态分解的异步电机转子断条故障诊断[J]. 电工技术学报, 2023, 38(8): 2048-2059.
Xia Zhiling, Hu Kaibo, Liu Xinyue, et al. Fault diagnosis of rotor broken bar in induction motor based on variable mode decomposition[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(8): 2048-2059.
[8] Singh G, Naikan V N A. Detection of half broken rotor bar fault in VFD driven induction motor drive using motor square current MUSIC analysis[J]. Mechanical Systems and Signal Processing, 2018, 110: 333-348.
[9] 曹建刚, 张博, 贺竹林. 希尔伯特变换在牵引电机转子断条故障诊断中的应用研究[J]. 城市轨道交通研究, 2013, 16(5): 46-49.
Cao Jiangang, Zhang Bo, He Zhulin. Application of Hilbert transform in fault diagnosis of traction motors[J]. Urban Mass Transit, 2013, 16(5): 46-49.
[10] 王万丁, 宋向金, 陈前, 等. 采用整流技术的变频供电感应电机转子断条故障诊断方法[J]. 电工技术学报, 2022, 37(16): 4074-4083.
Wang Wanding, Song Xiangjin, Chen Qian, et al. Broken rotor bar fault diagnosis in inverter-fed induction motors using the rectification technology[J]. Transactions of China Electrotechnical Society, 2022, 37(16): 4074-4083.
[11] 王照伟, 郭雯君, 宋向金, 等. 融合TKEO和Goerztel算法的感应电机转子断条故障诊断[J]. 电工技术学报, 2024, 39(12): 3679-3690.
Wang Zhaowei, Guo Wenjun, Song Xiangjin, et al. Fault diagnosis of broken rotor bar in induction motor based on TKEO and Goertzel algorithm[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(12): 3679-3690.
[12] Kong Haipeng, Cheng Xiaoqing, Niu Buzhao, et al. Fault diagnosis method for EMU traction motor based on machine learning[C]//2024 Global Reliability and Prognostics and Health Management Conference, Beijing, China, 2024: 1-6.
[13] 张坤鹏, 李昊, 安春兰, 等. 融合能量熵编码和分类模型的牵引电机故障诊断[J]. 铁道学报, 2023, 45(9): 64-73.
Zhang Kunpeng, Li Hao, An Chunlan, et al. Fault diagnosis of traction motor based on fusion of energy entropy coding and classification model[J]. Journal of the China Railway Society, 2023, 45(9): 64-73.
[14] Abdellatif S, Aissa C, Hamou A A, et al. A deep learning based on sparse auto-encoder with MCSA for broken rotor bar fault detection and diagnosis[C]// 2018 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Algiers, Algeria, 2018: 1-6.
[15] Lee H, Jeong H, Koo G, et al. Attention recurrent neural network-based severity estimation method for interturn short-circuit fault in permanent magnet synchronous machines[J]. IEEE Transactions on Industrial Electronics, 2021, 68(4): 3445-3453.
[16] 张宝杰, 麻宸伟, 贾震, 等. 基于卷积神经网络的牵引电机定子绕组匝间短路故障诊断[J]. 铁道学报, 2024, 46(4): 73-79.
Zhang Baojie, Ma Chenwei, Jia Zhen, et al. Fault diagnosis of stator winding inter-turn short circuit in traction motors based on convolutional neural network[J]. Journal of the China Railway Society, 2024, 46(4): 73-79.
[17] 张辉, 戈宝军, 韩斌, 等. 基于GAF-CapsNet的电机轴承故障诊断方法[J]. 电工技术学报, 2023, 38(10): 2675-2685.
Zhang Hui, Ge Baojun, Han Bin, et al. Fault diagnosis method of motor bearing based on GAF-CapsNet[J]. Transactions of China Electrotechnical Society, 2023, 38(10): 2675-2685.
[18] Kou Linlin, Qin Yong, Zhao Xuejun, et al. A multi- dimension end-to-end CNN model for rotating devices fault diagnosis on high-speed train bogie[J]. IEEE Transactions on Vehicular Technology, 2020, 69(3): 2513-2524.
[19] Tran M Q, Liu Mengkun, Tran Q V, et al. Effective fault diagnosis based on wavelet and convolutional attention neural network for induction motors[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 71: 3501613.
[20] Wen Long, Li Xinyu, Gao Liang, et al. A new convolutional neural network-based data-driven fault diagnosis method[J]. IEEE Transactions on Industrial Electronics, 2017, 65(7): 5990-5998.
[21] Valtierra-Rodriguez M, Rivera-Guillen J R, Basurto- Hurtado J A, et al. Convolutional neural network and motor current signature analysis during the transient state for detection of broken rotor bars in induction motors[J]. Sensors, 2020, 20(13): 3721.
[22] 丁伟, 宋俊材, 陆思良, 等. 基于多通道信号二维递归融合和ECA-ConvNeXt的永磁同步电机高阻接触故障诊断[J]. 电工技术学报, 2024, 39(20): 6397- 6408.
Ding Wei, Song Juncai, Lu Siliang, et al. High- resistance connection fault diagnosis of permanent magnet synchronous motor based on two-dimensional recursive fusion of multi-channel signals and ECA- ConvNeXt[J]. Transactions of China Electrotechnical Society, 2024, 39(20): 6397-6408.
[23] Xie Tingli, Huang Xufeng, Choi S K. Intelligent mechanical fault diagnosis using multisensor fusion and convolution neural network[J]. IEEE Transa- ctions on Industrial Informatics, 2021, 18(5): 3213- 3223.
[24] 王照伟, 刘传帅, 赵文祥, 等. 多尺度多任务注意力卷积神经网络滚动轴承故障诊断方法[J]. 电机与控制学报, 2024, 28(7): 65-76.
Wang Zhaowei, Liu Chuanshuai, Zhao Wenxiang, et al. Rolling bearing fault diagnosis with multi-scale multi-task attention convolutional neural network[J]. Electric Machines and Control, 2024, 28(7): 65-76.
[25] Zhu Qingyun, Lu Jingfeng, Wang Xiaoxian, et al. Real-time quality inspection of motor rotor using cost-effective intelligent edge system[J]. IEEE Internet of Things Journal, 2022, 10(8): 7393-7404.
[26] Wang Qilong, Wu Banggu, Zhu Pengfei, et al. ECA-net: efficient channel attention for deep con- volutional neural networks[C]//2020 IEEE/CVF Con- ference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 2020: 11531-11539.
[27] He Liu, Wang Dong, Yi Cai, et al. Extracting cyclo- stationarity of repetitive transients from envelope spectrum based on prior-unknown blind decon- volution technique[J]. Signal Processing, 2021, 183: 107997.
[28] 邱锡鹏. 神经网络与深度学习[M]. 北京: 机械工业出版社, 2020.
[29] Ioffe S, Szegedy C. Batch normalization: accelerating deep network training by reducing internal covariate shift[C]//International Conference on Machine Learning, Lille, France, 2015: 1-11.
[30] He Kaiming, Zhang Xiangyu, Ren Shaoqing, et al. Deep residual learning for image recognition[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 2016: 770-778.
[31] Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[C]//31st Conference on Neural Infor- mation Processing Systems, Long Beach, CA, USA, 2017: 6000-6010.
[32] Szegedy C, Ioffe S, Vanhoucke V, et al. Inception-v4, Inception-ResNet and the impact of residual con- nections on learning[C]//Advances in Neural Infor- mation Processing Systems, Long Beach, California, 2017: 11231-11239.
[33] Aline E T, Rogerio A F, Marcelo S, et al. Experi- mental database for detecting and diagnosing rotor broken bar in a three-phase induction motor[DB/OL]. (2020-09-24) [2024-11-28]. https://ieee-dataport.org/ open-access/experimental-database-detecting-and- diagnosing-rotor-broken-bar-three-phase-induction.
Abstract A traction motor is a key component of the traction transmission system in high-speed trains, which converts electrical energy into mechanical energy and provides power for the train. Accurate diagnosis of a broken rotor bar fault in a traction motor is crucial for the safe operation of high-speed trains, and it is also a key aspect of fault prognostics and health management (PHM). When a broken rotor bar fault occurs in the traction motor, the fault frequency is close to the power supply frequency, and the amplitude is small, making it easy to be masked. The fault frequency varies widely, resulting in significant changes in feature scale. Extracting practical features and obtaining accurate diagnosis results are challenging. This paper proposes a fault diagnosis method based on multi-scale feature fusion convolutional neural networks (MSFFCNN).
To eliminate the power frequency component in the current signal and enhance the fault features, a current preprocessing method based on Hilbert transform (HT) is proposed. Firstly, the envelope analysis is used to eliminate the power supply frequency and enhance the fault features. Then, the obtained envelope signal is converted into an image. A multi-scale feature extraction module with attention fusion is constructed. Multiple convolution kernels are used to extract features simultaneously. Efficient channel attention (ECA) is employed for the weighted fusion of multi-scale features to enhance relevant features and suppress irrelevant features. Then, the MSFFCNN is designed to identify broken rotor bar faults and their corresponding fault degrees. Experiments were conducted on two datasets of broken rotor bars, and ablation and comparison experiments were designed to verify the proposed method.
The results of the ablation experiment show that, compared with the pretreatment without HT, the accuracy of the proposed method increases by 13.37%, 1.40%, and 0.80% when the training ratio is 20%, 40%, and 60%, respectively. Compared to the case without the ECA mechanism, the accuracy of the proposed method increases by 0.69%, 0.62%, and 0.15% when the training ratio is 20%, 40%, and 60%, respectively. The proposed method achieves a higher average diagnostic accuracy and F1 score on both data sets than the comparison method at all training set ratios. When the proportion of the training set is 60%, the average diagnostic accuracy of the proposed method on the two data sets reaches 99.85% and 99.82%. The visualization results show that the feature boundaries of different fault categories extracted by the proposed method are clear, which can effectively distinguish the broken rotor bar fault under various loads and power supply frequencies.
The following conclusions can be drawn. (1) HT is used for current preprocessing to eliminate the influence of the power frequency component, and the broken rotor bar fault features are enhanced. The generated images contain more detailed information, making it easier to extract practical fault features and improve diagnostic accuracy. (2) ECA fuses multi-scale features to automatically realize effective feature extraction and avoid overfitting, enabling the model to adapt to different loads and power supply frequencies. As a result, the diagnostic accuracy and generalization performance of the model are improved. (3) Compared with the related methods, the proposed diagnostic method shows strong feature extraction ability, noise resistance, and generalization performance. It can identify broken rotor bar faults more accurately, providing a reference for the targeted setting of traction motor maintenance plans.
Keywords:Hilbert transformation, multi-scale convolutional, attention mechanism, fault diagnosis, broken rotor bar
中图分类号:TM307
DOI: 10.19595/j.cnki.1000-6753.tces.250208
北京市自然科学基金项目(L191008)、中国国家铁路集团有限公司系统性重大项目(P2018J001)和北京交通大学研究生专业核心课程建设项目(YJSSQ20230328)资助。
收稿日期 2025-02-11
改稿日期 2025-03-11
丁 卓 男,2000年生,硕士研究生,研究方向为电机在线监测与故障诊断。
E-mail: 22121442@bjtu.edu.cn
张和生 男,1970年生,教授,博士生导师,研究方向为电力牵引与传动设备的智能在线监测、故障诊断与可靠性,嵌入式系统 实现。
E-mail: hszhang@bjtu.edu.cn(通信作者)
(编辑 崔文静)