图1 单电阻测量电流的PMSM驱动电路
Fig.1 A PMSM drive circuit with current measured by one shunt resistor
摘要 有限集模型预测控制(FCS-MPC)能够高效处理逆变器开关离散控制的问题,但和其他高性能永磁同步电机控制方法一样,FCS-MPC需要实时相电流采样。由于电流传感器增加了成本、体积,在小功率驱动系统中多采用母线电流单电阻采样的方案,在相电流重构过程中因存在重构死区而无法准确采集电流,影响控制精度。死区问题现有的对策一般针对有调制器的场合,而对FCS-MPC等无调制器离散开关控制策略无法直接应用。为解决这一问题,该文提出了一种基于单电阻采样的有限集模型预测控制算法,对无法重构相电流的开关状态,通过模型预测值来替代采样值,并提出一种连续状态惩罚机制来解决欠激励所导致的模型更新停滞问题。通过与相电流传感器采样以及传统空间矢量脉宽调制(SVPWM)单电阻采样方案进行对比实验,验证了所提方法的有效性。
关键词:有限集模型预测控制 单电阻采样 电流采样 连续状态惩罚机制
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)由于其高功率密度、宽调速范围和良好的可靠性,在工业传动和电动汽车等领域得到了广泛应用[1-4]。
为了进一步提升PMSM的动态性能,近年来有限控制集模型预测控制(Finite Control Set Model Predictive Control, FCS-MPC)引起了广泛关注[5-7]。FCS-MPC依据电机的数学模型对未来系统状态进行预测,并从多个可能的控制输入中选择使系统性能最优的控制动作。在每个控制周期内,FCS-MPC通过代价函数评估预测的状态,选取代价函数达到最小的控制动作为下一步的输出[8-12]。其特点在于能够直接、有效地处理离散控制问题,简化控制器设计,并具备多目标优化、约束处理以及非线性系统控制的优势。
和其他高性能控制方法一样,FCS-MPC需要实时相电流采样。相电流一般通过相线上的电流传感器测量[13-14],但电流传感器的使用增加了系统的成本和体积,在一些小功率驱动系统中往往采用电阻采样[15]。鉴于这一需求,文献[16]中提出了单电阻采样的电流重构技术,该方法通过在每个控制周期的两个有效电压矢量上采样直流母线电流,来重构三相电流。但在一些特殊工况下,如PWM深度较低时,尤其是在两个矢量扇区边界区域和低占空比区域,逆变器上施加的电压有效矢量时长过短,导致无法进行相电流重构[17-19]。学者们针对这些问题进行研究,提出了修改PWM移相、测量脉冲插入、观测器法等补偿方法来解决重构死区效应,有效地重构出三相电流。文献[20]提出通过修改PWM占空比,在非调制区域增大采样时间窗口,并在下周期纠正占空比,以保持平均占空比不变,实现相电流重构。文献[21-22]则通过平移PWM开关信号满足最小采样时间,但要求精确控制PWM周期,增加算法的复杂性,并可能导致电流谐波增加。文献[23-24]采用插入测量脉冲完成电流重构,减少复杂性,但增加了开关损耗。观测器方法如文献[25]的Luenberger观测器和文献[26-28]的线性参数变化观测器修正盲区电流进行重构,文献[29]通过预测与滤波提高重构精度,但都依赖精确模型,鲁棒性较弱。
尽管上述方法在基于PWM的控制策略中取得了显著成效,但这些方法在无调制器的控制场合中,如有限控制集模型预测控制,难以直接应用。由于FCS-MPC采用的是无调制器离散开关控制策略,因此上述文献[20-29]中基于调制器的重构策略不再适用,限制了FCS-MPC在单电阻采样下的应用。为使FCS-MPC能够适用于单电阻采样的PMSM控制场合,本文提出了一种基于单电阻采样的有限集模型预测算法,通过无调制器离散开关控制解决采样点时变和重构死区的问题,通过预测模型重构无法采样的相电流,针对模型参数可能的时变,设计集总参数及其在线估计方法,并解决了欠激励所导致的电流采样更新停滞的问题。
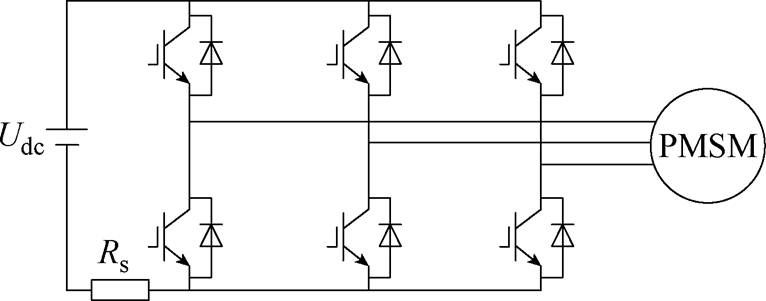
利用单电阻测量电流的PMSM驱动电路如图1所示。图中,Rs为与直流母线负相串联的采样电阻,借助模拟到数字(Analog to Digital, AD)对该电阻两端电压值进行采样,与当前PWM切换信息相结合,对三相电流进行重构。
图1 单电阻测量电流的PMSM驱动电路
Fig.1 A PMSM drive circuit with current measured by one shunt resistor
在三相全桥逆变器的驱动电路中,定义上桥臂接通时刻为“1”,关断时刻为“0”,三相开关信号定义为Sa、Sb、Sc,当Sa=1时,表示上桥臂导通,Sa=0时表示关断。传统的三相逆变器采用的空间矢量脉宽调制(Space Vector PWM, SVPWM)控制方式,将电压空间平面划分为6个扇区,包括2个零电压矢量和6个非零电压矢量。在传统的相电流重构方法中,通过在一个PWM周期内的不同时刻采样母线电流来获取各相电流,理想情况下,每一脉宽调制循环触发两次采样,如图2所示为Ⅰ扇区的PWM波形。
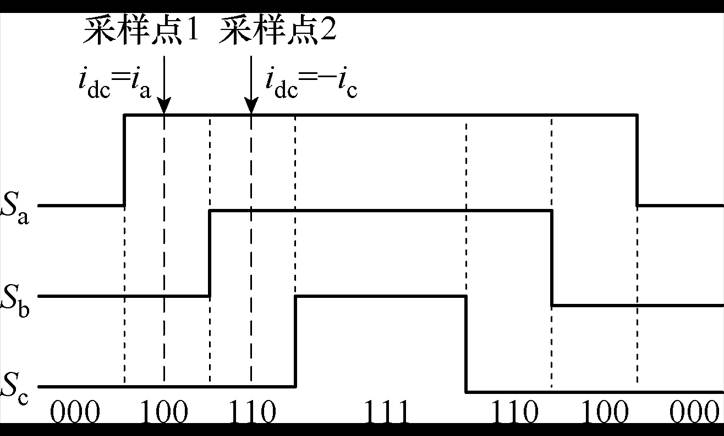
图2 Ⅰ扇区的PWM波形
Fig.2 Sector Ⅰ PWM waveforms
在100状态下采样得到A相电流ia,110状态下采样得到电流-ic,再根据三相电流之间的关系重构出另外一相电流,以此类推,结合各个扇区的开关状态得到各个相电流之间的关系,见表1。
表1 基本电压矢量与采样电流的关系
Tab.1 The relationship between the basic voltage vector and the sampling current
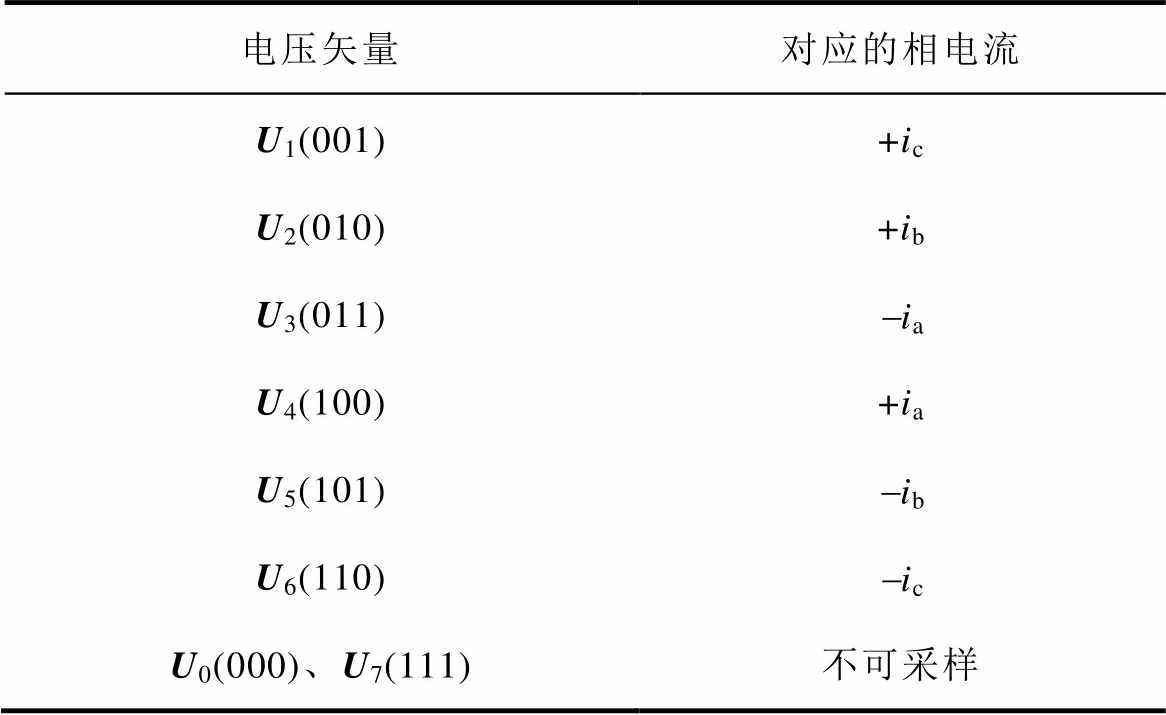
电压矢量对应的相电流 U1(001)+ic U2(010)+ib U3(011)-ia U4(100)+ia U5(101)-ib U6(110)-ic U0(000)、U7(111)不可采样
上述分析基于理想条件,忽略了电流采样时长,而在实际条件下,由于死区效应、开关器件在导通与关断过程中的响应延迟及采样保持时间等因素,单电阻采样需经过一个最小采样时间Tmin才能获取稳定电流信息。电流重构死区如图3所示。图中,在扇区边界和低占空比区域,会因有效矢量时长过短导致无法重构两相电流,采样窗口宽度不足如图4所示。这些无法进行电流重构的区域称为“重构死区”。
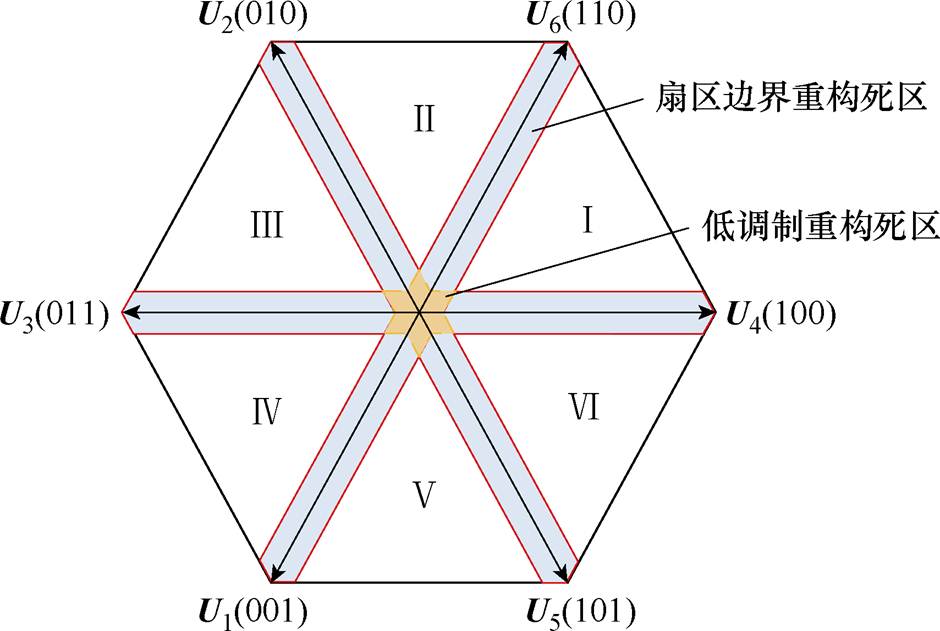
图3 电流重构死区
Fig.3 The current reconstruction dead zone
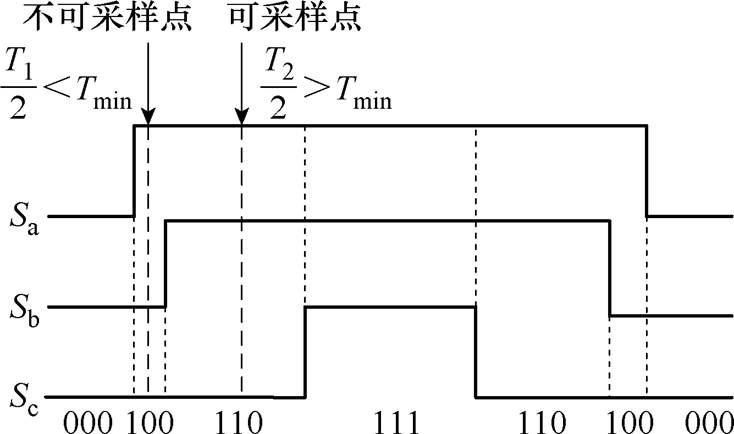
图4 采样窗口宽度不足
Fig.4 Insufficient width of the sampling window
为了解决在重构死区的电流重构问题,传统方法如PWM移相、插入测量脉冲和观测器法虽可实现电流重构,但仍存在采样时刻不固定、开关频率增大或算法复杂的问题。因此,寻求既能避免上述问题又能提升电流重构精度的方案成为优化单电阻采样技术的关键。
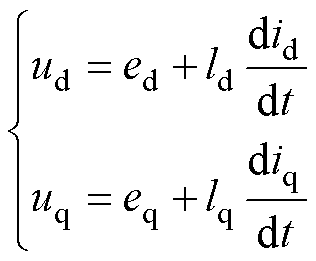
在d、q旋转坐标系下,PMSM电流模型表示为
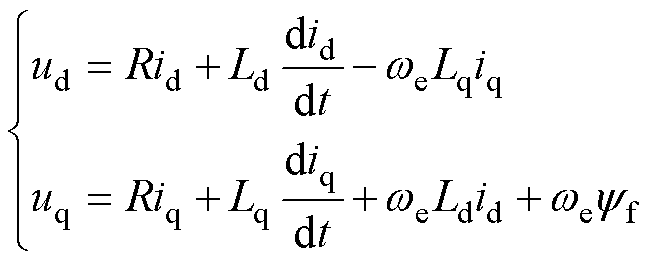 (1)
(1)
式中,ud、uq分别为d、q轴定子电压;id、iq分别为d、q轴定子电流;R为定子电阻; 为转子永磁体磁链;
为转子永磁体磁链; 为转子电角度;Ld、Lq分别为d、q轴电感。d、q轴电流由相电流ia、ib、ic计算得到,即
为转子电角度;Ld、Lq分别为d、q轴电感。d、q轴电流由相电流ia、ib、ic计算得到,即
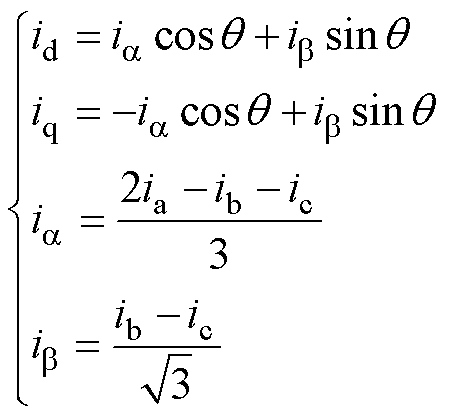 (2)
(2)
式中,q为转子电角度。
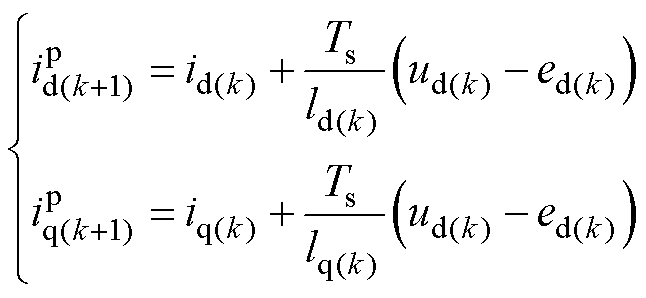
用前向欧拉法对式(1)在第k时刻离散化,得预测模型为
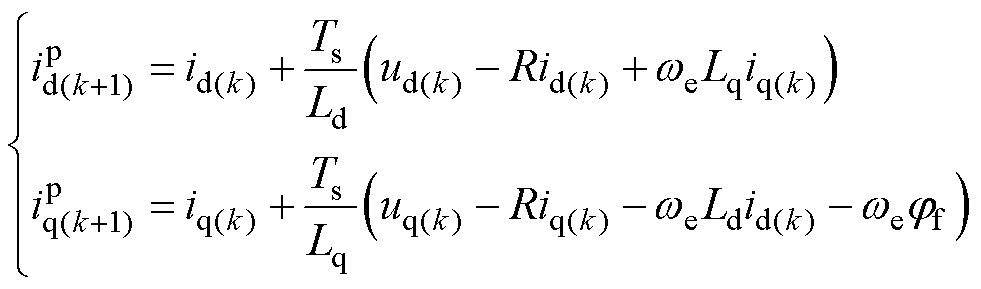 (3)
(3)
式中,Ts为采样周期;上标“p”表示预测值。在实际应用的过程中,常常会采用两步预测法对微控制器运行时间所产生的延时进行补偿[30],首先要将上一周期运算所得到的开关状态施加于逆变器上,然后利用式(3)计算k+1时刻的电流,再根据
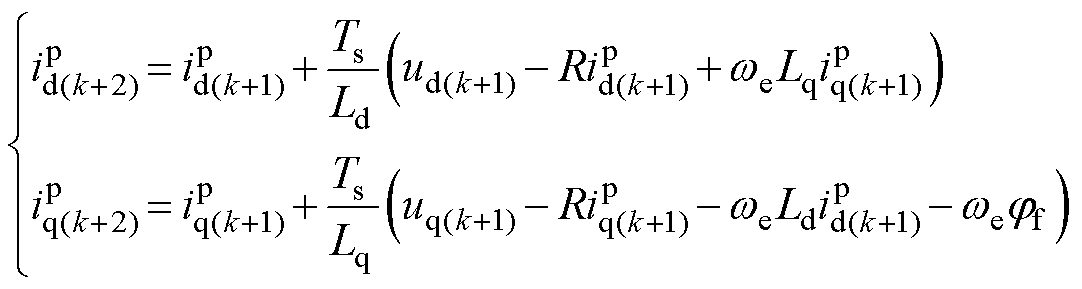 (4)
(4)
分别预算出八种Sabc作用下k+2时刻d、q轴电流,并将其代入表征控制目标的代价函数J1,即
 (5)
(5)
式中, 和
和 为电流指令;J1为电流代价,用来评估使能代价函数J1最小的
为电流指令;J1为电流代价,用来评估使能代价函数J1最小的 和
和 所对应的开关状态Sabc,即下一周期最佳控制量。FCS-MPC的预测模型式(3)和式(4)是由系统的数学模型离散化得到的。通过代价函数对每一个控制量进行估计,以使预测的电流误差最小,并且通过对所有的开关组合进行遍历,从而确保能够找到全局最优解。
所对应的开关状态Sabc,即下一周期最佳控制量。FCS-MPC的预测模型式(3)和式(4)是由系统的数学模型离散化得到的。通过代价函数对每一个控制量进行估计,以使预测的电流误差最小,并且通过对所有的开关组合进行遍历,从而确保能够找到全局最优解。
然而,由于FCS-MPC不使用调制器,需要重新设计电流采样策略,同时解决传统方案中重构死区的问题。
为了解决FCS-MPC无法适配单电阻采样的问题,提出了基于单电阻采样的模型预测算法。该算法同时利用FCS-MPC预测模型和电阻采样值来完成三相电流的重构,且在预测控制下不存在电流重构死区的影响,无需额外注入测量脉冲或者移相,具体算法过程如下:
当三相逆变器的开关状态处于零向量状态时,无法通过单电阻采样获取电流信息,此时可以利用模型预测来替代采样值。而当逆变器处于非零向量状态时,可以通过直流母线单电阻采样获得一相实测电流,通过复用FCS-MPC预测模型式(3)来获取另一相电流的预测值,根据三相电流之间的关系重构出完整的电流信息。表2总结了根据ABC三相对应Sa、Sb、Sc的开关状态使用预测值和测量值的情况,表中,0表示下桥处于关断状态,1表示下桥处于导通状态;idc为电阻采样电流的测量值。
表2 相电流的选择和预测
Tab.2 Phase current selection and prediction
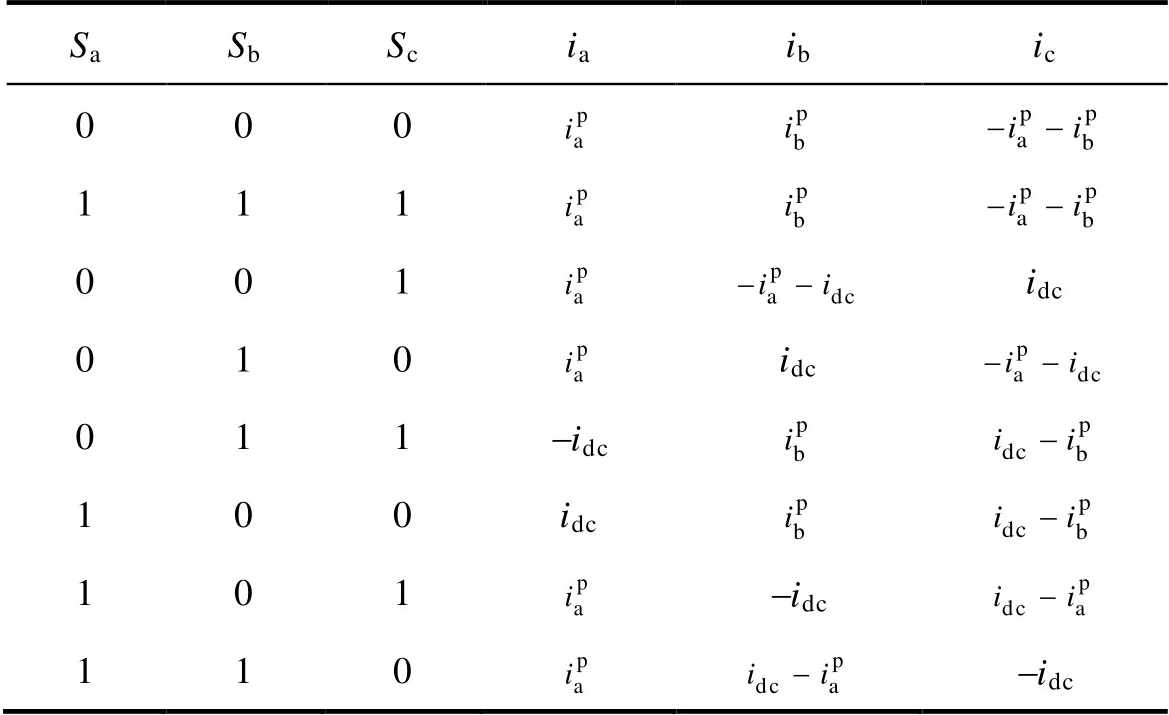
SaSbSciaibic 000 111 001idc 010idc 011-idc 100idc 101-idc 110-idc
预测的相电流可通过前一次采样间隔的预测d、q轴电流来计算,即
 (6)
(6)
 (7)
(7)
 (8)
(8)
应当指出,通过表2得到对应的电流数据,依据式(3)、式(4)计算下一周期的最优控制量,其对应的开关状态在整个控制周期内保持恒定不变,因此无需占空比调节,不存在重构死区,并且开关动作均发生在每周期开始的时刻,采样点可固定在每周期开始的前一刻,电流采样时刻分析如图5所示,避免了传统方法如图4中采样时刻计算复杂且不固定的问题。
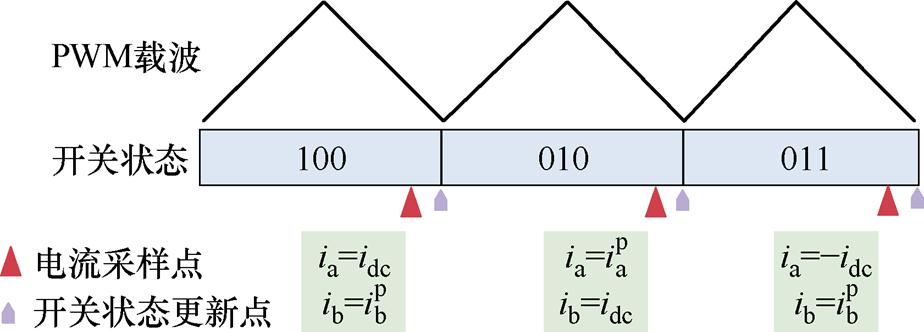
图5 电流采样时刻分析
Fig.5 Current sampling time analysis
通过式(6)~式(8)可以看出,所提出重构策略的有效性依赖d、q轴电流预测的准确性,即依赖精确的模型参数。然而在实际应用中,PMSM的参数往往无法精确获取,或者会随工作点、温度变化而变化,导致电流预测不准[31]。为了克服参数敏感性,本文设计了集总参数模型式(9),通过在线辨识集总参数,实现模型修正,从而提高电流预测的准确性。
 (9)
(9)
其中
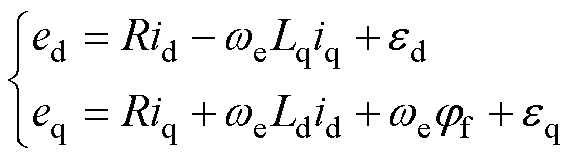 (10)
(10)
式中,ed、eq分别为包括定子电阻压降、反电动势、交叉耦合在内所有因素产生的d、q轴等效集总电动势; 和
和 为所有其他未建模的扰动;ld、lq分别为d、q轴集总动态电感。同样采用前向欧拉离散化,得预测模型定义式为
为所有其他未建模的扰动;ld、lq分别为d、q轴集总动态电感。同样采用前向欧拉离散化,得预测模型定义式为
 (11)
(11)
依据工作点的变化对ed、eq和ld、lq进行实时估计,由此实现的预测控制策略仅通过电流采样即可有效解决由模型参数失配及时变特性引发的控制问题。
为实现电机参数ed、eq和ld、lq的在线更新,提出一种基于梯度下降的参数自适应算法。以电流预测误差作为目标函数,通过推导目标函数关于待更新参数的梯度,构建迭代优化规则,实现参数的逐步校准,具体算法如下。
首先定义目标函数J2为
 (12)
(12)
根据目标函数J2求出各个参数的梯度,其中目标函数对d轴电感ld的偏导数得到ld的梯度为
 (13)
(13)
 (14)
(14)
同理,求出lq的梯度为
 (15)
(15)
目标函数对d轴的反电动势的偏导数得到ed的梯度,有
 (16)
(16)
 (17)
(17)
同理,求出eq的梯度为
 (18)
(18)
求得每个参数的梯度后,通过梯度下降法来更新参数,更新公式为
 (19)
(19)
式中, 为待更新参数;
为待更新参数; 为学习率,可以根据系统实际进行调整,对每个参数的更新公式如下:
为学习率,可以根据系统实际进行调整,对每个参数的更新公式如下:
更新d轴电感ld为
 (20)
(20)
更新q轴电感lq为
 (21)
(21)
更新d轴反电动势ed为
 (22)
(22)
更新q轴反电动势eq为
 (23)
(23)
式中,s为当前时刻所对应的开关状态;a1~a4为各更新项学习率。
通过FCS-MPC固有的离散开关动作,经过梯度下降法实时更新即可辨识出ed、eq和ld、lq 4个集总参数,降低了重构策略对模型参数的依赖性。
集总参数模型解决了电流预测精度对模型参数的依赖性问题,但集总参数的辨识依赖持续激励[32]。在基于PWM的控制方式中,需要额外注入信号产生持续激励,而在FCS-MPC中,持续激励由控制方式固有的离散开关动作产生。但是,在起动、低速运行等特殊工况下,可能出现连续几个周期开关状态保持不变,没有开关动作,从而不能维持持续激励,这种“欠激励”状态会使模型更新停滞。根据表2,当连续相同开关状态使得某相电流一直使用预测值而不是采样值时,会导致误差累积、控制性能恶化甚至不稳定。
为了避免更新停滞,本文提出了一种连续状态惩罚机制,在代价函数中增设连续状态惩罚项,避免连续出现相同开关状态导致更新停滞。具体方案是通过为电机的每个开关状态分别设定三个计数器:计数器A、计数器B和计数器C。在电机起动运行时,计数器用于记录各相电流未通过电阻采样的次数。如果在一个开关周期内,某一相电流连续多个时刻未被采样,且次数超过N(N为正整数),系统将根据电阻采样的次数优化开关状态,确保下一时刻的状态能够优先采样该相电流。
基于第2节提到的代价函数定义一个新的表达式来描述代价函数J1和阈值N之间的关系,调整后的代价函数为

 (24)
(24)
其中
 (25)
(25)
式中,K为一个变量,可以取一个较大的值(文中取K=1 000),来确保当连续状态惩罚机制触发时,开关状态所对应为最小的代价函数寻优量; 为一个条件函数;X表示计数器,分别对应Acnt、Bcnt、Ccnt;N为统计电流未被采样的次数,当N取较小时,所提机制对开关状态的干预较为频繁,而当N取值较大时,控制干预较少,机制对开关状态的选择作用减弱,可以赋予其不同的取值优化计数规则。
为一个条件函数;X表示计数器,分别对应Acnt、Bcnt、Ccnt;N为统计电流未被采样的次数,当N取较小时,所提机制对开关状态的干预较为频繁,而当N取值较大时,控制干预较少,机制对开关状态的选择作用减弱,可以赋予其不同的取值优化计数规则。
连续状态惩罚机制具体实现过程如图6所示,当连续三个采样时刻均未采集到A相电流信号(即连续未采集次数N=3),惩罚机制将被触发,优先下一时刻采样得到电流ia或者-ia,从而实现电流采样的优化。
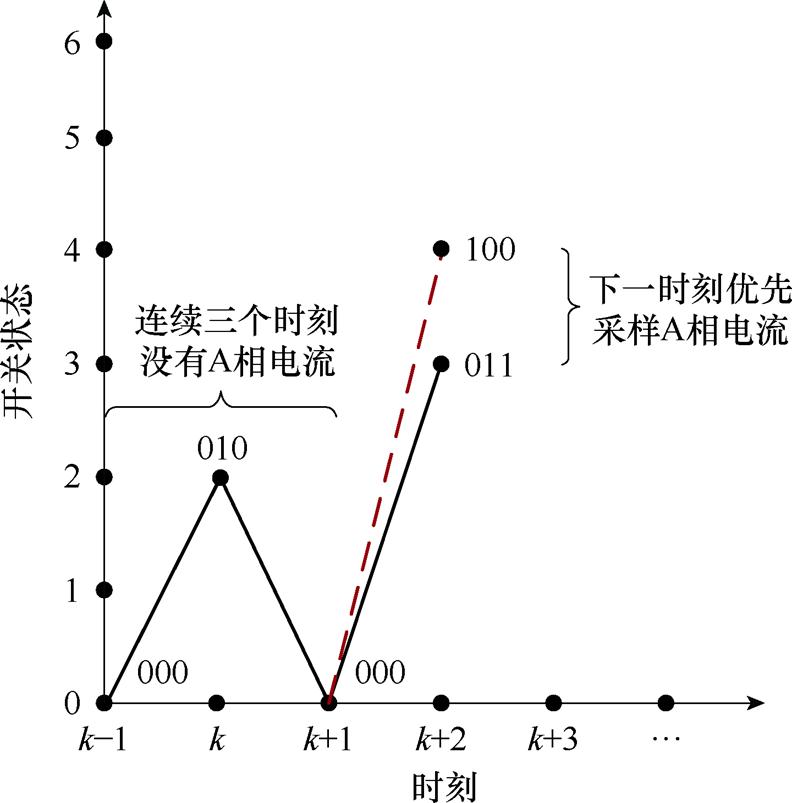
图6 连续状态惩罚机制优化
Fig.6 Continuous state penalty mechanism
图7为根据预测电流重构算法、集总参数辨识算法和连续状态惩罚机制组成的基于单电阻采样的永磁同步电机有限集模型预测控制系统框图。
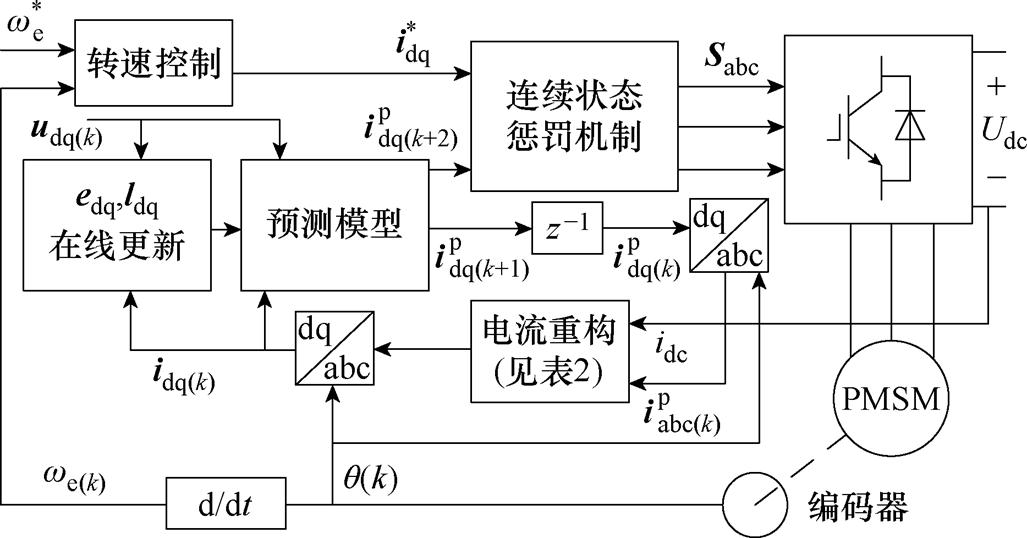
图7 系统框图
Fig.7 System block diagram
为了验证所提方法,在如图8所示的油泵PMSM测试平台进行验证,主控芯片为TMS320F28335,逆变器功率模块为FSBB30CH60C,PMSM的参数见表3。
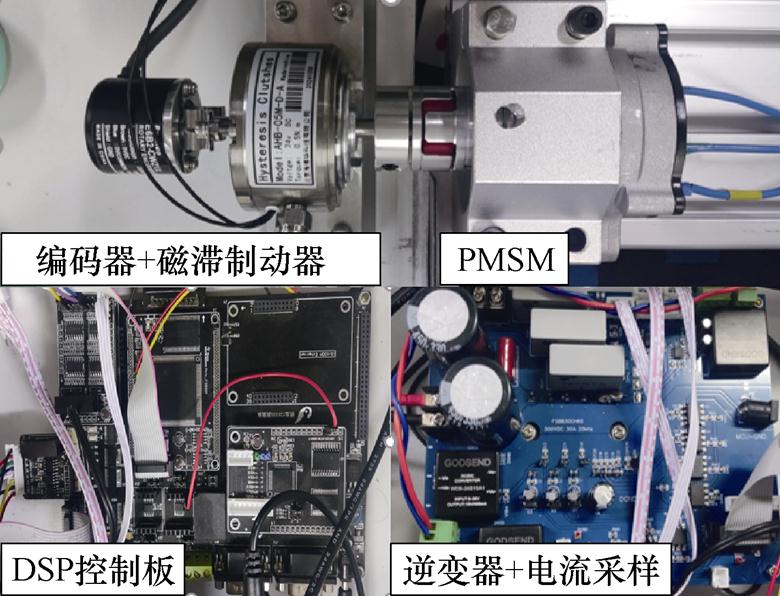
图8 实验装置
Fig.8 Experimental setup
表3 PMSM参数
Tab.3 PMSM parameters
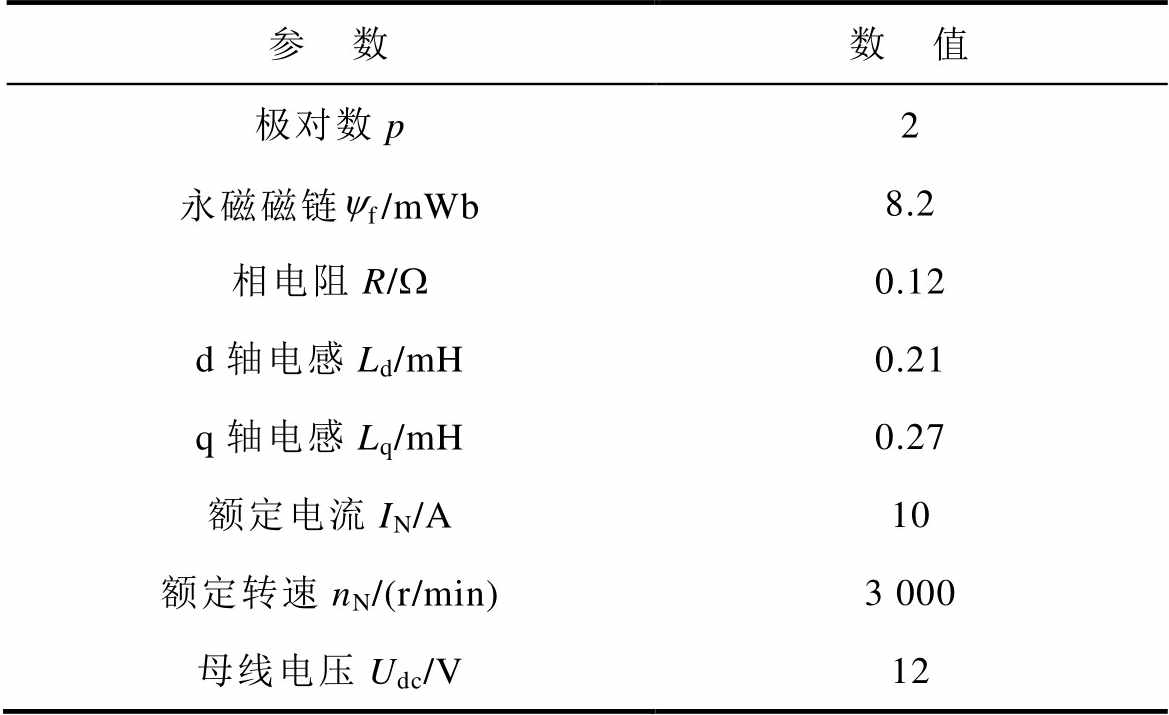
参 数数 值 极对数p2 永磁磁链yf/mWb8.2 相电阻R/W0.12 d轴电感Ld/mH0.21 q轴电感Lq/mH0.27 额定电流IN/A10 额定转速nN/(r/min)3 000 母线电压Udc/V12
分别采用本文提出的单电阻采样有限集模型预测控制算法和传统单电阻结合SVPWM采样算法对电流进行重构,同时利用两个霍尔电流传感器对相电流进行采样,作为基准值与电阻采样策略进行比较,但不参与控制。为检测采样电流的误差,将重构电流与传感器采样电流进行对比分析。
设定两种方法在相同的开关频率(1 000 Hz),转速为1 000 r/min,调节负载使稳态相电流达到5 A的情况下,观察两种方法所重构的电流波形,实验结果如图9所示。
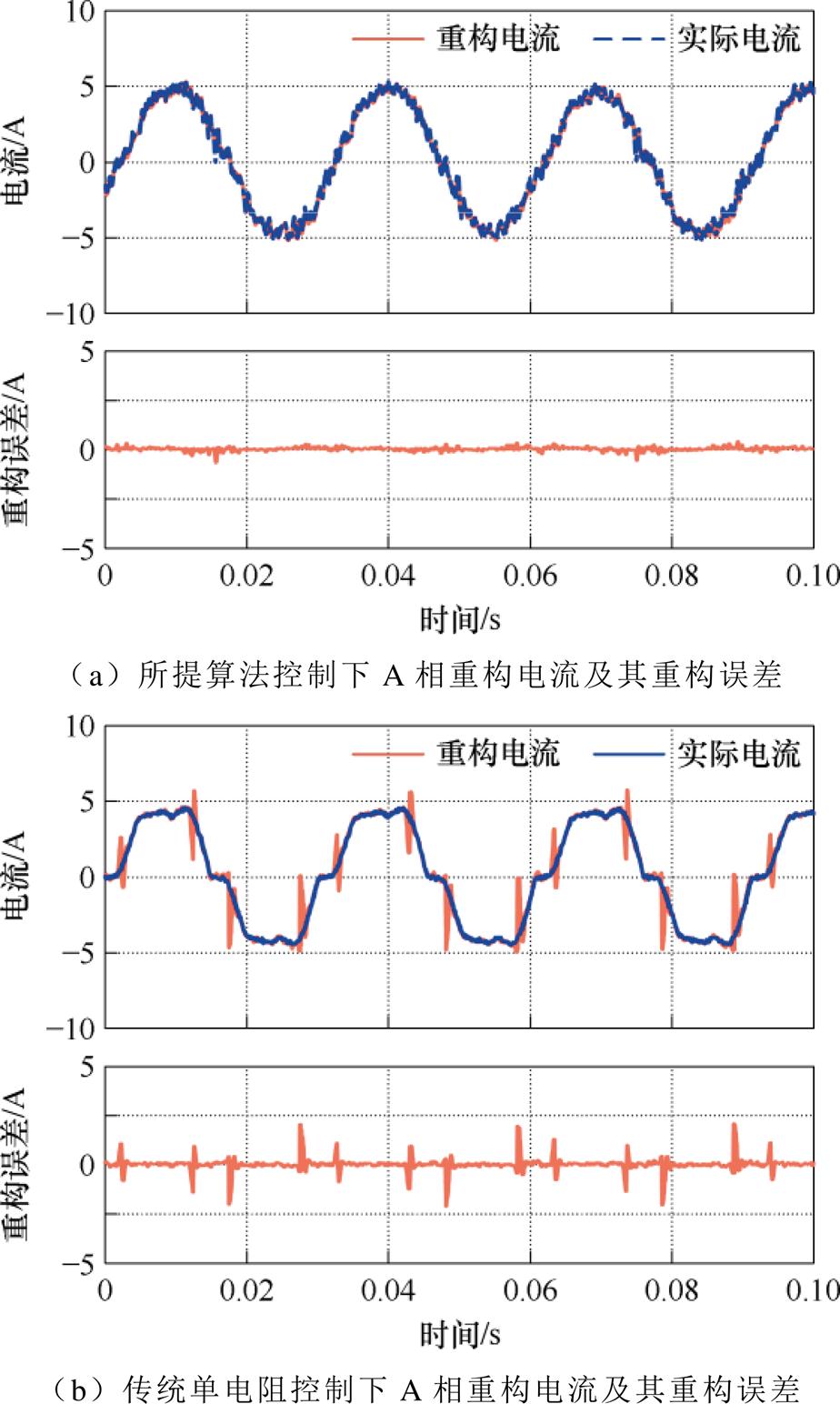
图9 本文所提算法和传统单电阻采样性能对比
Fig.9 Comparison of proposed algorithm and traditional single-resistor sampling performance
图9a的实验结果表明,所提算法可以准确地重构出三相电流,且重构电流和传感器采样电流差值能够控制在较小的范围。通过图9b中传统单电阻采样算法与本文算法的重构电流对比,可见传统算法受扇区切换过程中重构死区的影响,导致电流重构误差增加。
为更深入地分析采样电流的误差,对预测精度定义以下性能指标,表征预测瞬态精度的方均根(Root Mean Square, RMS)预测为
 (26)
(26)
式中, 、
、 为电阻采样值;
为电阻采样值; 、
、 为传感器采样值。根据电阻采样和传感器采样电流所表征出的瞬态精度方均差进行对比,在0~1.5 s期间用传统单电阻重构电流,1.5~3 s用所提预测算法重构电流,表征出的RMS电流方均误差如图10所示。可以看出,与基于传统单电阻采样方案相比,电流采样方均误差减小约50%,具有更好的采样性能。
为传感器采样值。根据电阻采样和传感器采样电流所表征出的瞬态精度方均差进行对比,在0~1.5 s期间用传统单电阻重构电流,1.5~3 s用所提预测算法重构电流,表征出的RMS电流方均误差如图10所示。可以看出,与基于传统单电阻采样方案相比,电流采样方均误差减小约50%,具有更好的采样性能。
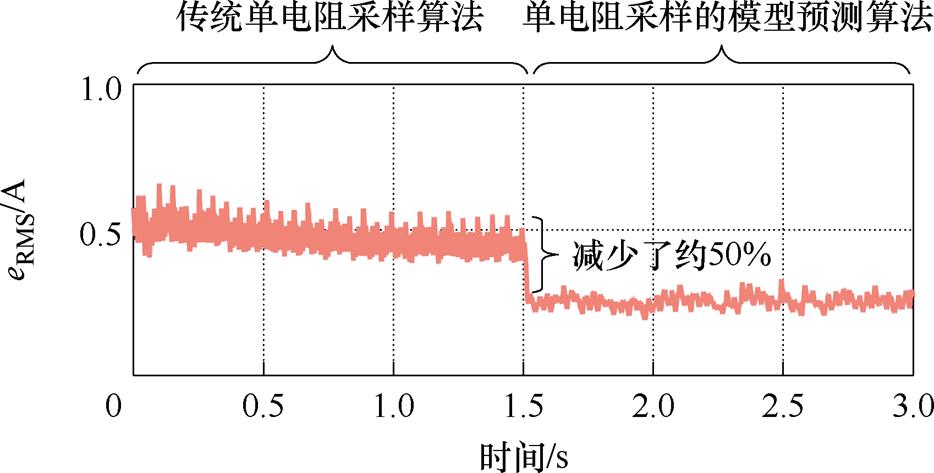
图10 方均误差
Fig.10 Mean squared error
此外,在相同开关频率、不同转速工况下,采用传统单电阻控制与预测单电阻控制两种策略对永磁同步电机(PMSM)开展对比实验验证。在保持环境条件、负载特性等外部因素一致的前提下,通过采集不同转速点下两种控制策略的电流总谐波畸变率(Total Harmonic Distortion, THD),对比分析其在变转速工况下对电流谐波的抑制能力,具体实验结果如图11所示。
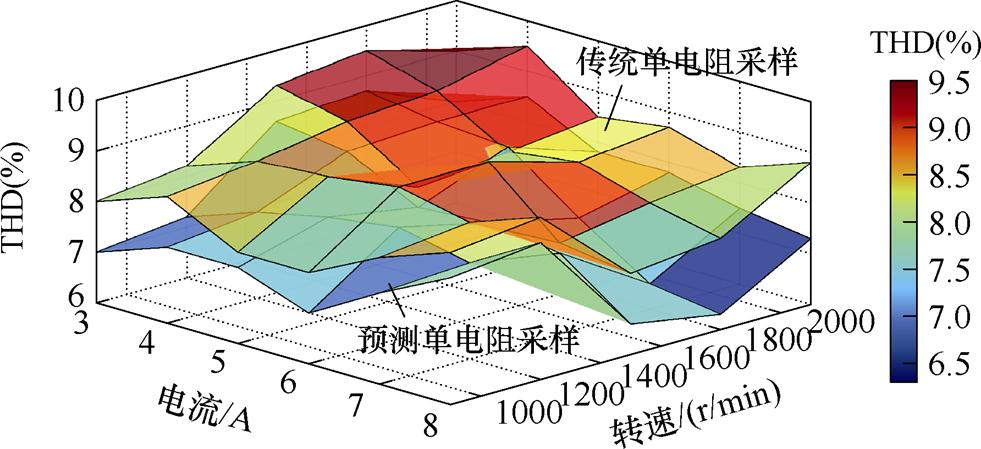
图11 不同工况下传统控制和预测控制的电流THD
Fig.11 Current THD under traditional control and predictive control in different operating conditions
图11对比实验结果表明:在不同转速下,所提方法的THD普遍优于传统单电阻控制,特别是在低速和高速段预测控制的优势更为显著。这是因为预测控制通过实时预判电流变化趋势优化控制输出,降低谐波,提高电流控制精度。相比之下,传统控制方法响应较慢,难以精准跟踪电流变化,尤其在高速运行时,THD显著上升。
为评估算法的动态性能,在额定负载下分别进行了零速起动和正反转实验,实验结果如图12所示。从本文方法重构电流和传感器实测电流对比可以看出,在零速起动、正反转切换等动态过程中,所提算法均可以准确地重构出电流信息,且不影响速度控制性能。
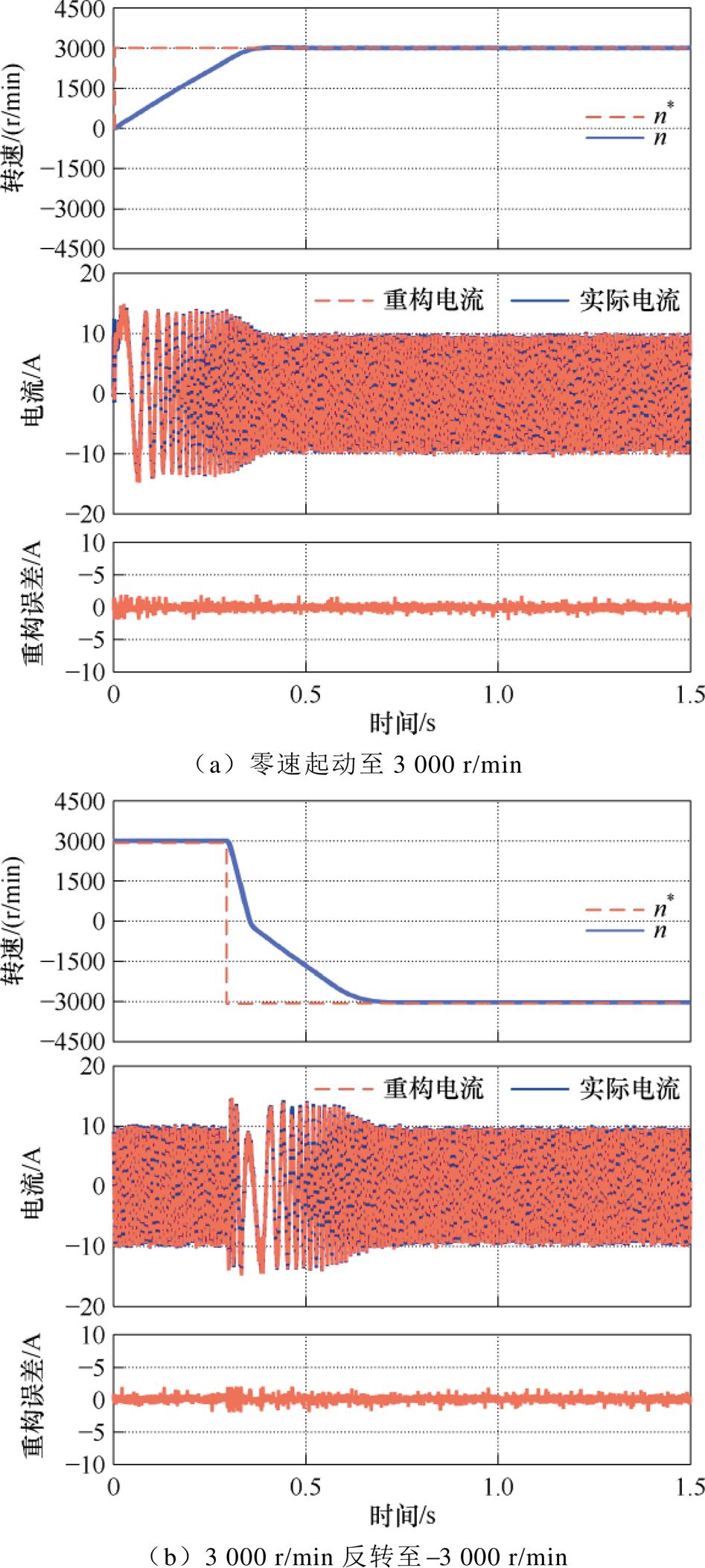
图12 零速起动和反转测试
Fig.12 Starting and speed reversal tests
图13验证了3.2节提出的集总参数辨识方法。电机轻载运行于3 000 r/min,突加额定负载。图13中,集总动态电感ld、lq以额定电感为参考值,集总电动势参考值ed、eq则以忽略未建模扰动的式(10)实时计算。在加载后,由于电流变化,集总电动势由于电阻分压变化而改变,但其估计值能够准确跟随该变化;而集总动态电感则由于电流增大、磁路饱和程度上升而降低,虽然实际值难以准确获取,但图中估计值 、
、 能够反映出该变化,证明所提集总参数辨识方法的有效性。
能够反映出该变化,证明所提集总参数辨识方法的有效性。
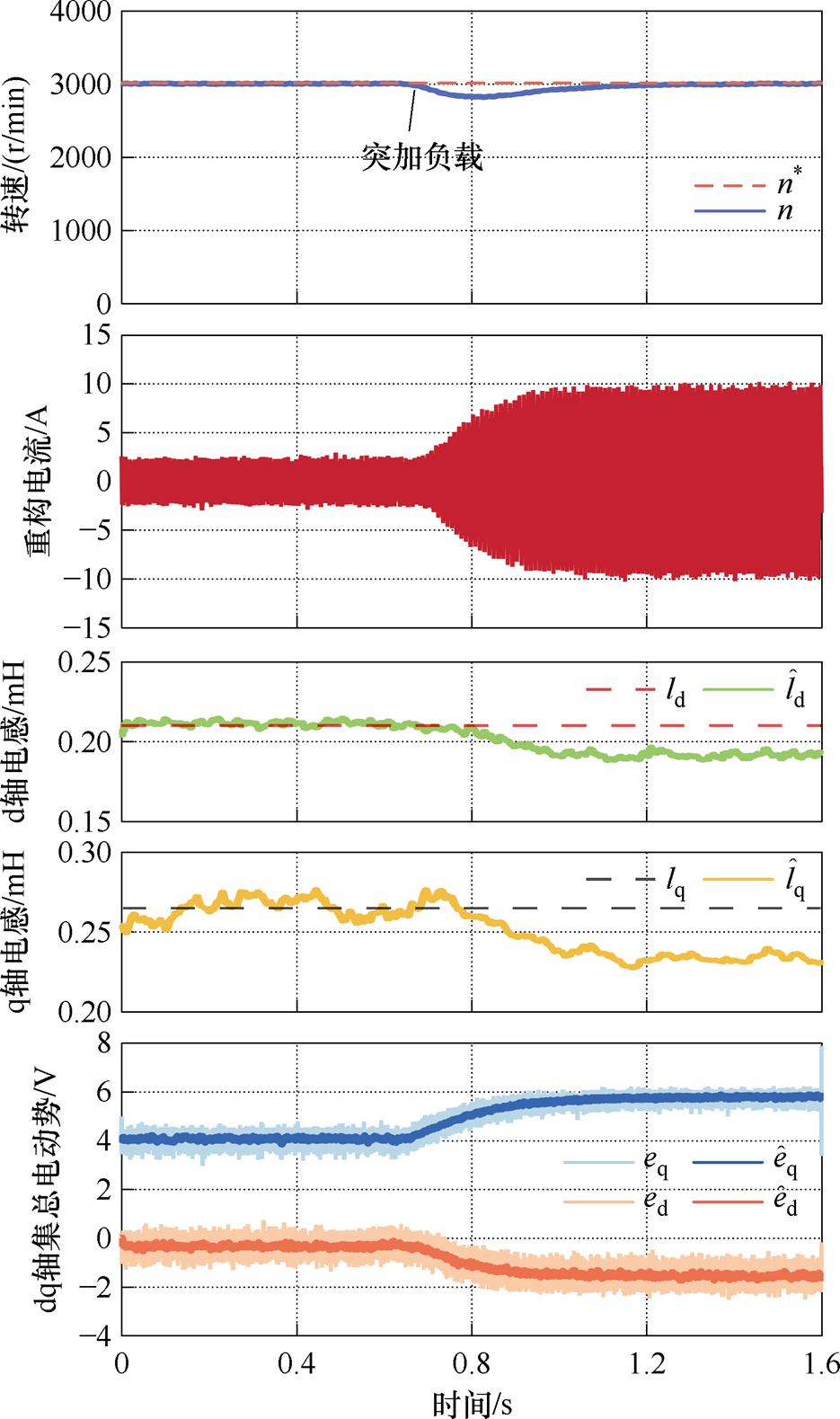
图13 集总参数辨识
Fig.13 Lumped parameter identification
为了验证第4节所提连续状态惩罚机制的有效性,在上述实验的基础上,设置电机的初始转速为1 500 r/min,阈值N=3时,在电机运行到6.6 s时,停用所提连续状态惩罚机制,观察电流重构波形如图14a所示,当此机制停用之后电流开始逐渐发生畸变,7.44 s后不能正确重构出电流,电机也无法正确运行;同时记录电机的开关状态,比较图14b和图14c中惩罚机制停用前后的变化,结果表明,停用惩罚机制会导致开关状态持续保持在特定状态,无法正确重构电流,对比结果验证了连续状态惩罚机制的有效性。
根据第4节提到,阈值N的取值无论过大还是过小,都会通过影响模型的更新过程进而影响控制性能。当N较小时,控制干预频繁,采样精度较高,但可能导致系统不稳定;而当N较大时,控制干预较少,模型更新不到位,采样精度下降,影响控制效果。为评估N的取值对系统性能的影响,本文通对比不同N取值下的THD,确定N的最优取值范围。
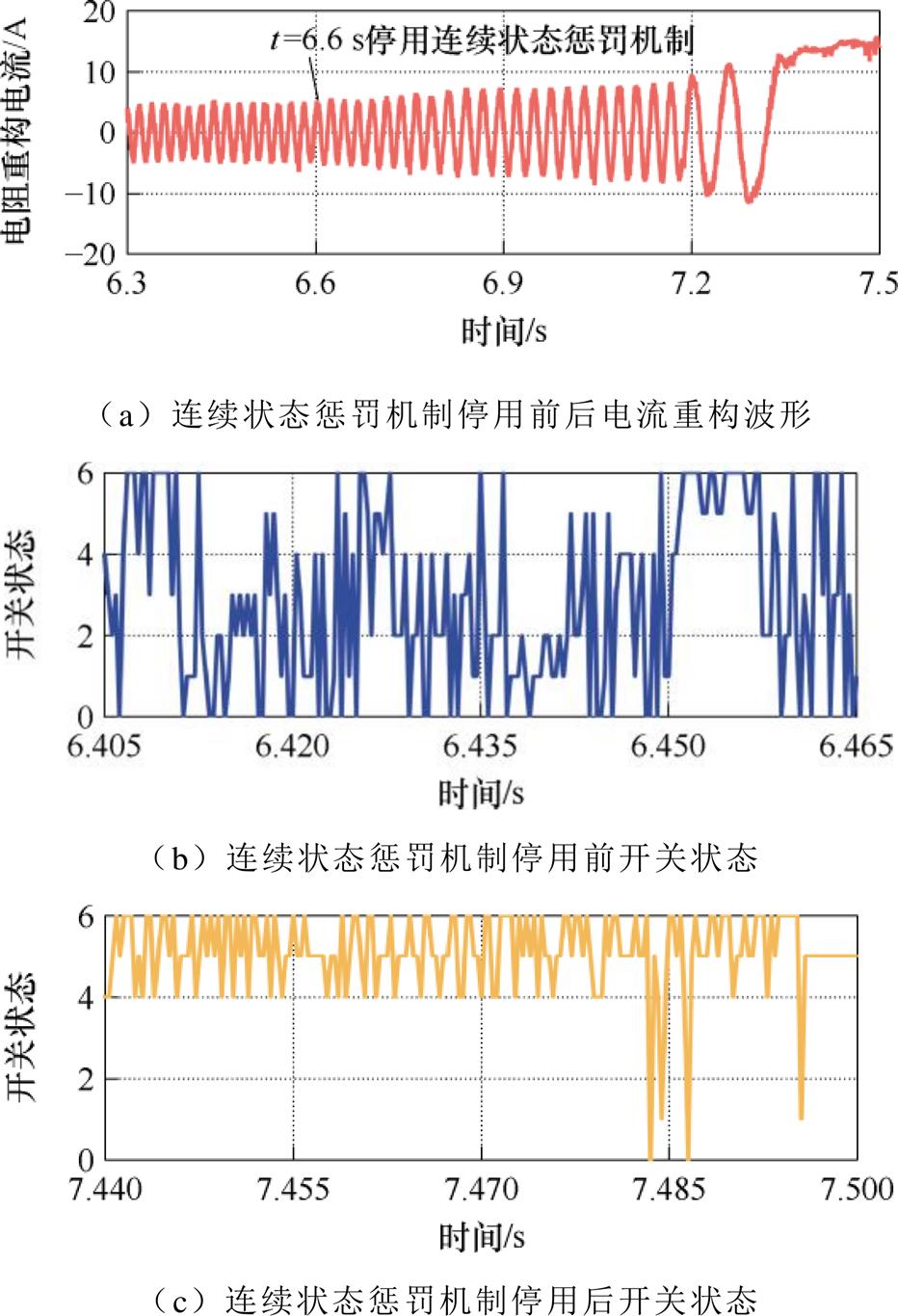
图14 正常运行时停用连续状态惩罚机制
Fig.14 Deactivate the continuous state penalty mechanism during normal operation
实验分别在1 000 r/min和1 500 r/min的工况下进行,对比结果如图15所示。通过对不同N取值THD的对比分析发现,当N取值为4时,THD达到最低值,系统控制性能最佳。而随着N的进一步增大,THD显著上升,导致系统性能明显退化。
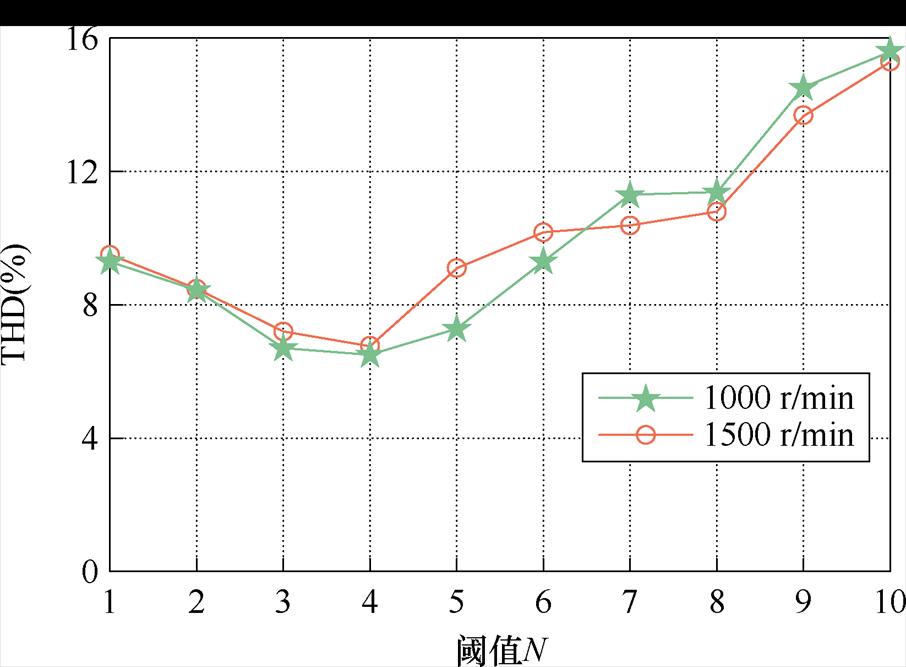
图15 不同阈值下THD
Fig.15 THD under different thresholds
本文围绕单电阻采样技术的电流重构展开研究,提出一种基于单电阻采样的有限集模型预测控制的算法,经理论分析和实验验证,得出如下结论:
1)提出了基于单电阻采样的有限集模型预测控制算法,通过预测模型电流重构解决了FCS-MPC不适用于单电阻采样场合的问题。
2)利用集总参数模型在线辨识降低了电流重构对电机参数的依赖性,提高了重构电流的精度。
3)提出一种连续状态惩罚机制,解决特殊工况下欠激励所导致的模型更新停滞问题。
参考文献
[1] 王斯博, 孙明冲, 龚海桂, 等. 车用高速永磁同步电机低交流损耗定子绕组优化[J]. 电机与控制学报, 2025, 29(1): 25-36.
Wang Sibo, Sun Mingchong, Gong Haigui, et al. Optimization of low AC loss stator winding for high- speed permanent magnet synchronous motor for automotive applications[J]. Electric Machines and Control, 2025, 29(1): 25-36.
[2] 高兴展, 于思洋, 汤佳泉, 等. 电动汽车用复合磁体永磁电机电磁及调速系统设计[J]. 微电机, 2025, 58(2): 21-26.
Gao Xingzhan, Yu Siyang, Tang Jiaquan, et al. Design of electromagnetic and speed control system for composite permanent magnet motor used in electric vehicles[J]. Micromotors, 2025, 58(2): 21-26.
[3] 王力新, 王晓远, 高鹏, 等. 电动汽车用内置式永磁同步电机转矩脉动分析及抑制[J]. 电工技术学报, 2024, 39(20): 6386-6396.
Wang Lixin, Wang Xiaoyuan, Gao Peng, et al. Torque ripple reduction analysis of interior permanent magnet synchronous motor for electric vehicle[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(20): 6386-6396.
[4] 朱少斌, 李少纲. 基于超级电容的永磁直驱风电机组低电压穿越控制研究[J]. 电气技术, 2017, 18(2): 20-24.
Zhu Shaobin, Li Shaogang. Study on LVRT control strategy of permanent magnet directly-driven wind turbine based on super capacitor[J]. Electrical Engineering, 2017, 18(2): 20-24.
[5] Siami M, Khaburi D A, Rivera M, et al. A com- putationally efficient lookup table based FCS-MPC for PMSM drives fed by matrix converters[J]. IEEE Transactions on Industrial Electronics, 2017, 64(10): 7645-7654.
[6] Yao Chunxing, Ma Guangtong, Sun Zhenyao, et al. Weighting factors optimization for FCS-MPC in PMSM drives using aggregated residual network[J]. IEEE Transactions on Power Electronics, 2024, 39(1): 1292-1307.
[7] Vazquez S, Zafra E, Aguilera R P, et al. Prediction model with harmonic load current components for FCS-MPC of an uninterruptible power supply[J]. IEEE Transactions on Power Electronics, 2022, 37(1): 322-331.
[8] 陈卓易, 邱建琪, 金孟加. 永磁同步电机有限集无参数模型预测控制[J]. 电机与控制学报, 2019, 23(1): 19-26.
Chen Zhuoyi, Qiu Jianqi, Jin Mengjia. Finite control set nonparametric model predictive control for permanent magnet synchronous machines[J]. Electric Machines and Control, 2019, 23(1): 19-26.
[9] 程勇, 颜宇尧, 杜光辉. 基于理想电压矢量位置的永磁同步电机模型预测电流控制[J]. 电机与控制学报, 2025, 29(4): 135-146.
Cheng Yong, Yan Yuyao, Du Guanghui. Model predictive current control for permanent magnet synchronous motors based on ideal voltage vector position[J]. Electric Machines and Control, 2025, 29(4): 135-146.
[10] 徐奇伟, 易良武, 夏波, 等. 基于xy平面闭环电流控制的双三相永磁同步电机改进多矢量模型预测控制[J]. 电工技术学报, 2025, 40(14): 4506-4521.
Xu Qiwei, Yi Liangwu, Xia Bo, et al. Improved multi-vector model predictive current control of dual- three-phase permanent magnet synchronous motors based on xy subspace closed-loop current control[J]. Transactions of China Electrotechnical Society, 2025, 40(14): 4506-4521.
[11] 陈再发, 刘彦呈. 基于抗扰预测模型的表贴式永磁同步电机占空比控制集模型预测控制[J]. 电机与控制应用, 2025, 52(2): 171-180.
Chen Zaifa, Liu Yancheng. Model predictive control of duty cycle control set for surface-mounted per- manent magnet synchronous motor based on anti- disturbance[J]. Electric Machines & Control Appli- cation, 2025, 52(2): 171-180.
[12] Xue Cheng, Zhou Dehong, Li Yunwei. Finite-control- set model predictive control for three-level NPC inverter-fed PMSM drives with LC filter[J]. IEEE Transactions on Industrial Electronics, 2021, 68(12): 11980-11991.
[13] Song Yuge, Lu Jiadong, Hu Yihua, et al. Expanding limit of minimum sampling time using auxiliary vectors for PMSM drives with single DC-link current sensor[J]. IEEE Transactions on Industrial Electronics, 2023, 70(4): 3437-3448.
[14] 黄玲林, 王爽, 李志伟. 基于单直流母线电流采样的永磁同步电机无位置传感器控制研究[J]. 电机与控制应用, 2024, 51(9): 51-59.
Huang Linglin, Wang Shuang, Li Zhiwei. Research on sensorless control of permanent magnet synchronous motor based on single DC bus current sampling[J]. Electric Machines & Control Application, 2024, 51(9): 51-59.
[15] Cheng Xin, Hu Jinfeng, Yu Ye, et al. Analysis and compensation of phase current measuring error caused by sensing resistor in PMSM application[J]. Sensors, 2024, 24(5): 1538.
[16] 魏海峰, 陆彦如, 江廷宇, 等. 考虑非观测区补偿的永磁同步电机单电阻采样重构[J]. 电工技术学报, 2018, 33(12): 2695-2702.
Wei Haifeng, Lu Yanru, Jiang Tingyu, et al. Single resistor sampling reconstruction of permanent magnet synchronous motor considering non-observation area compensation[J]. Transactions of China Electro- technical Society, 2018, 33(12): 2695-2702.
[17] 朱利东, 王鑫, 朱熀秋. 基于NNBPF-EKF的内置式永磁同步电机死区补偿方法[J]. 中国电机工程学报, 2020, 40(15): 5011-5020.
Zhu Lidong, Wang Xin, Zhu Huangqiu. IPMSM dead time compensation method based on NNBPF-EKF[J]. Proceedings of the CSEE, 2020, 40(15): 5011-5020.
[18] 秦腾, 马瑞卿, 梁景智, 等. 同步发电机带三相PWM整流器的死区补偿方法[J]. 微电机, 2025, 58(1): 1-6.
Qin Teng, Ma Ruiqing, Liang Jingzhi, et al. Com- pensation method for synchronous generators with three-phase PWM Rectifiers[J]. Micromotors, 2025, 58(1): 1-6.
[19] 郭玉敬, 张峻槐, 王帅, 等. 一种模型预测控制PMSM系统共模电压抑制策略[J]. 电机与控制学报, 2024, 28(3): 56-65.
Guo Yujing, Zhang Junhuai, Wang Shuai, et al. Common- mode voltage suppression strategy of PMSM system using model predictive control[J]. Electric Machines and Control, 2024, 28(3): 56-65.
[20] Xu Yongxiang, Yan Hao, Zou Jibin, et al. Zero voltage vector sampling method for PMSM three- phase current reconstruction using single current sensor[J]. IEEE Transactions on Power Electronics, 2017, 32(5): 3797-3807.
[21] Song Shoujun, Xia Zekun, Fang Gaoliang, et al. Phase current reconstruction and control of three-phase switched reluctance machine with modular power converter using single DC-link current sensor[J]. IEEE Transactions on Power Electronics, 2018, 33(10): 8637-8649.
[22] 黄科元, 伍瑞泽, 黄守道, 等. 单电阻采样的永磁同步电动机相电流重构策略[J]. 电力系统及其自动化学报, 2018, 30(9): 114-120.
Huang Keyuan, Wu Ruize, Huang Shoudao, et al. Phase current reconstruction strategy for PMSM using one-shunt current sampling[J]. Proceedings of the CSU-EPSA, 2018, 30(9): 114-120.
[23] 王强, 刘文建, 佘宏伟. 新型脉冲插入法的永磁同步电机相电流重构[J]. 计算机与数字工程, 2025, 53(8): 2329-2335.
Wang Qiang, Liu Wenjian, She Hongwei. Phase current reconstruction of PMSM with new pulse insertion method[J]. Computer and Digital Engineering, 2025, 53(8): 2329-2335.
[24] 陈思宇, 向学位, 李辉, 等. 基于改进零脉冲插入法的永磁同步电机相电流重构策略[J]. 电机与控制学报, 2024, 28(6): 25-35.
Chen Siyu, Xiang Xuewei, Li Hui, et al. Phase current reconstruction strategy of PMSM based on improved zero pulse insertion method[J]. Electric Machines and Control, 2024, 28(6): 25-35.
[25] Zuo Ying, Lai Chunyan, Iyer L V. Improved single current sensor based PMSM control under low frequency ratio using discrete-time adaptive luenberger observer[J]. IEEE Transactions on Industrial Elec- tronics, 2024, 71(9): 10297-10308.
[26] 房钰超, 王博, 王元奎, 等. 电流传感器故障状态下内嵌式永磁同步电机的无位置传感器容错控制算法研究[J]. 电机与控制学报, 2024, 28(8): 1-9.
Fang Yuchao, Wang Bo, Wang Yuankui, et al. Research on sensorless fault-tolerant control algorithm for interior permanent magnet synchronous machine under sensor fault conditions[J]. Electric Machines and Control, 2024, 28(8): 1-9.
[27] Saritha B, Janakiraman P A. Sinusoidal three-phase current reconstruction and control using a DC-link current sensor and a curve-fitting observer[J]. IEEE Transactions on Industrial Electronics, 2007, 54(5): 2657-2664.
[28] 王海清, 李世孝. 基于单电流传感器的永磁同步电机矢量控制[J]. 机械研究与应用, 2023, 36(6): 157-161, 165.
Wang Haiqing, Li Shixiao. Vector control of per- manent magnet synchronous motor based on single current sensor[J]. Mechanical Research & Application, 2023, 36(6): 157-161, 165.
[29] 刘艳, 邵诚. 三相电压源型PWM逆变器相电流重构策略研究[J]. 信息与控制, 2007, 36(4): 506-513, 518.
Liu Yan, Shao Cheng. Reconstruction strategies for phase currents in three phase voltage-source PWM inverters[J]. Information and Control, 2007, 36(4): 506-513, 518.
[30] Vazquez S, Rodriguez J, Rivera M, et al. Model predictive control for power converters and drives: advances and trends[J]. IEEE Transactions on Indu- strial Electronics, 2017, 64(2): 935-947.
[31] Young H A, Perez M A, Rodriguez J. Analysis of finite-control-set model predictive current control with model parameter mismatch in a three-phase inverter[J]. IEEE Transactions on Industrial Elec- tronics, 2016, 63(5): 3100-3107.
[32] Nalakath S, Preindl M, Emadi A. Online multi- parameter estimation of interior permanent magnet motor drives with finite control set model predictive control[J]. IET Electric Power Applications, 2017, 11(5): 944-951.
Abstract Finite-control-set model predictive control (FCS-MPC) has garnered significant attention in permanent magnet synchronous motor (PMSM) control due to its simple structure, multi-objective coordination capability, and nonlinear optimization. Like other high-performance control strategies for PMSMs, FCS-MPC requires real-time phase current sampling. Since current sensors increase both cost and system size, low-power drive systems commonly utilize single-resistor DC-link current sampling. However, during phase current reconstruction, the presence of a dead zone distorts current acquisition, thereby compromising control accuracy. Existing dead-time compensation methods are generally designed for modulated systems and cannot be directly applied to modulator-free discrete switching strategies such as FCS-MPC. Therefore, this paper proposes a finite-control-set model predictive control algorithm based on single-resistor current sampling.
Firstly, under zero-vector states of the three-phase inverter, no phase current information is available through single-resistor sampling. In such cases, the current is estimated using the predictive model. During active vector states, the current of one phase is measured via the DC-link resistor, while another phase's current is predicted using the FCS-MPC model. The three-phase currents are then reconstructed based on their balanced relationship. Secondly, to improve reconstruction accuracy, a lumped-parameter model is developed along with a gradient-descent-based adaptive parameter identification algorithm, enabling online parameter estimation and reducing reliance on accurate model parameters. Thirdly, a continuous-state penalty mechanism is introduced by adding a penalty term to the cost function, thereby avoiding model update stagnation.
Finally, compared with a conventional SVPWM-based single-resistor sampling method, the proposed current-sampling algorithm was tested on a permanent-magnet synchronous motor driving an oil pump. Two Hall sensors measured the phase currents as a reference for accuracy evaluation. Experimental results show that the proposed method accurately reconstructs the three-phase currents under identical operating conditions, keeping errors within a small margin. The root-mean-square error between reconstructed and sensed currents is reduced by approximately 50% compared to the conventional approach. The proposed algorithm also achieved better total harmonic distortion (THD) performance across different speeds. Starting, reversal, and sudden-load tests verified its dynamic performance and support online parameter identification. The continuous state penalty mechanism has been validated during normal motor operation.
The following conclusions can be drawn. (1) A finite control set model predictive control algorithm based on single-resistor sampling is proposed. The issue of FCS-MPC unsuitability for single-resistor sampling scenarios is addressed by employing current reconstruction with the predictive model. (2) Online identification using a lumped parameter model reduces the dependency on precise motor parameters during current reconstruction, thereby improving the accuracy of the reconstructed currents. (3) A continuous state penalty mechanism is proposed to resolve model update stagnation caused by underexcitation during specific operating conditions.
Keywords:Finite-control-set model predictive control (FCS-MPC), single-resistor sampling, current sampling, continuous state penalty mechanism
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.242388
浙江省自然科学基金资助项目(LTGG23F030002, QN25F030021)。
收稿日期 2024-12-30
改稿日期 2025-06-05
赵 悦 男,1999年生,硕士研究生,研究方向为永磁同步电机预测控制。
E-mail: 2023220705044@mails.zstu.edu.cn
陈卓易 男,1990年生,副教授,研究方向为永磁同步电机预测控制。
E-mail: chenzhuoyi@nbt.edu.cn(通信作者)
(编辑 崔文静)