 (1)
(1)
摘要 无模型预测滑模控制(SMC)通过建立数据模型,实现对物理模型及参数的完全独立。但建模和更新过程对采样数据质量提出严格的要求,停滞及其负面影响成为制约技术发展的关键瓶颈。针对该问题,该文提出基于陷波抗停滞的永磁同步电机(PMSM)无模型预测电流滑模控制方法。该方法通过设计陷波结构,提取由控制策略产生的特定频段谐波,并反向注入采样数据,生成数据梯度,旨在有效减少停滞发生的可能性并缓解停滞效应造成的不良影响,确保数据模型的高度适配。在理论层面对方法可达性、稳定性及鲁棒性进行深入分析。实验表明,相较于比较控制方法,所提方法在电流质量和预测精度方面具有优势,为PMSM在复杂环境下的高性能控制提供了新的有效途径。
关键词:无模型预测滑模控制 陷波抗停滞部分 数据驱动模型 永磁同步电机
在高端装备快速发展的背景下,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)系统运行环境更加复杂恶劣,对其控制性能的要求日益复杂苛刻[1]。鉴于传统控制策略难以全面达标,滑模控制(Sliding Mode Control, SMC)凭借其强大的非线性处理能力,在电机驱动的转速、效率、位置控制系统中得到关注,特别是在应对系统非线性及不确定扰动方面,展现出良好的动态响应、强鲁棒性和广泛适用性,但其发展仍受制于抖振现象与模型依赖两大关键瓶颈[2]。
对于抖振现象,当前研究根据不同诱因形成三大主流技术路线。第一类技术路线,对于高频噪声引发的抖振,多采用低通滤波器进行衰减或滤除。如文献[3]的前馈补偿器,通过低通/高通滤波器组合补偿延迟削弱抖振。文献[4-5]则分别引入扩展卡尔曼滤波器和可变边界层技术,替代传统低通滤波器,在保持高频噪声抑制能力的同时提升稳态精度。第二类技术路线聚焦于趋近律优化,旨在通过非线性函数、双曲函数与饱和函数等构造自适应趋近律,从而平滑信号变化率,减少抖振振幅并防止快速抖振[6]。第三类技术路线则采用扰动观测方法,将抖振视为复合扰动并实时补偿,提升电机驱动系统的控制效果[7]。
尽管上述方法在一定程度上缓解了抖振问题,但SMC在电机驱动领域的设计过程中仍无法完全摆脱对精准系统物理模型的依赖。为突破这一桎梏,将SMC与无模型预测控制相结合成为新的探索方向,构建无模型预测滑模控制策略。该策略采用在线更新的数据模型来表征电机系统运动状态,实现过程无需任何物理参数参与,为解决模型依赖问题提供了新的思路。超局部模型利用集总变量涵盖系统未知成分,结合观测器或代数方法,对集总变量进行在线估算,保持良好的模型适配性[8-9]。文献[10]提出新型超局部模型,从集总变量中抽出状态变量,独立分析其影响;文献[11]将该模型优化为仿射超局部结构,通过引入仿射算子并结合最小二乘算法,进一步考虑非线性成分对性能的影响。时间序列模型充分考虑电机系统的时间特性,依托过去输入输出数据,将系统表述为一组离散传递函数。其中,模型系数通过递归最小二乘算法(Recursive Least Square, RLS)及其衍生算法进行在线估算[12]。为设计合适的控制方程,文献[13]将时间序列模型超局部化,采用智能比例(Intelligence Proportional, IP)控制方程推导未来控制信号。泛模型与时间序列模型类似,泛模型利用采样数据梯度值构建并更新离散传递函数组,以期获得低控制静差。除上述模型外,有多种数据模型同样适合表达电机系统,如查找表(Look-Up Table, LUT)[14]、动态线性化[15]、Koopman模型[16]等。
对于基于数据梯度在线更新的数据模型,充足的更新频率是获得高适配数据模型和高品质控制性能的关键。然而,受到有限处理器资源等因素影响,停滞时常发生,引发的停滞效应对控制性能造成负面影响[17]。由于基于LUT的有限控制集(Finite Control Set, FCS)无模型预测控制的实现逻辑中部分模型无法及时更新,停滞及其负面影响最为明显,抗停滞方法多针对该策略提出应对方案,直接或间接地增加模型的更新频率。其中,间接法通过矢量多次选取,间接提升更新频率。如文献[18-19]方法,在一个采样周期内进行二次或多次筛选候选矢量,对LUT元素进行多次更新,降低停滞效应的影响;直接法旨在每个采样周期内更频繁地更新LUT中元素,确保LUT能够实时反映系统的最新状态[20-21]。文献[22]提出一种LUT全更新方法,同时更新所有候选电压矢量的数据,使表格中所有元素均保持较好的更新频率;文献[23]针对三电平拓扑,在LUT存在更多元素的情况下,提出分类更新机制,同时对多个元素进行估算和更新,降低计算复杂度和停滞发生概率;文献[24]利用推导关系式和已知的两个连续电流梯度信息,估计其他所有未应用电压矢量的电流梯度,并对噪声干扰进行抑制,有效提升了模型精度和动稳态控制性能。
上述抗停滞方法均从增加更新频率角度应对停滞问题,直接应用于其他数据模型或无模型控制框架时存在困难。文献[25]对控制策略产生的谐波成分进行深入剖析,明确了其集中频段,并指出这些谐波含量因不利于数据模型适配性而被视为“无效”。鉴于这些无效成分在强制数据梯度生成中的潜在价值,本文提出一种新的研究思路,即基于陷波抗停滞的PMSM无模型预测电流滑模控制方法。与现有抗停滞方法不同,本文方法的核心在于设计一种针对谐波集中频段的陷波结构,从采样数据中分离无效成分。在检测到停滞迹象时,将这些成分重新反相注入采样数据,从而在产生数据梯度的同时,降低停滞发生的概率及其负面影响,确保数据模型与系统状态的高度适配。该方法不仅在原理上区别于现有从增加更新频率入手的思路,在实现方式上也不同于频繁更新模型元素,而是通过处理数据成分解决问题。以融合泛模型预测控制特性与非奇异快速滑模面的无模型预测电流滑模控制为例,设计陷波结构,在理论层面细致讨论方法的可达性、稳定性和鲁棒性,并通过实验分析验证所提方法的有效性,以及相较于传统方法在提升电流质量、增强预测精度方面的优势。
对于电流控制策略,在dq坐标系下,PMSM电压方程可反映系统运动状态,即
(1)
式中,isd、isq分别为定子电流d、q轴分量;usd、usq分别为定子电压d、q轴分量;Lsd、Lsq分别为定子电感d、q轴分量;Rs为定子电阻;wr为转子电角速度;ym为永磁体磁链。
为实现电流分量预测,基于采样周期Ts,采用前向欧拉法将电压方程微分项离散化,有
 (2)
(2)
式中,k为变量位于第k个采样周期。
根据式(1),物理模型反映定子电流和定子电压之间的因果关系。可设计泛模型替代物理模型为
 (3)
(3)
其中,模型变量变更为电流梯度Disx和电压梯度Dusx,即
 (4)
(4)
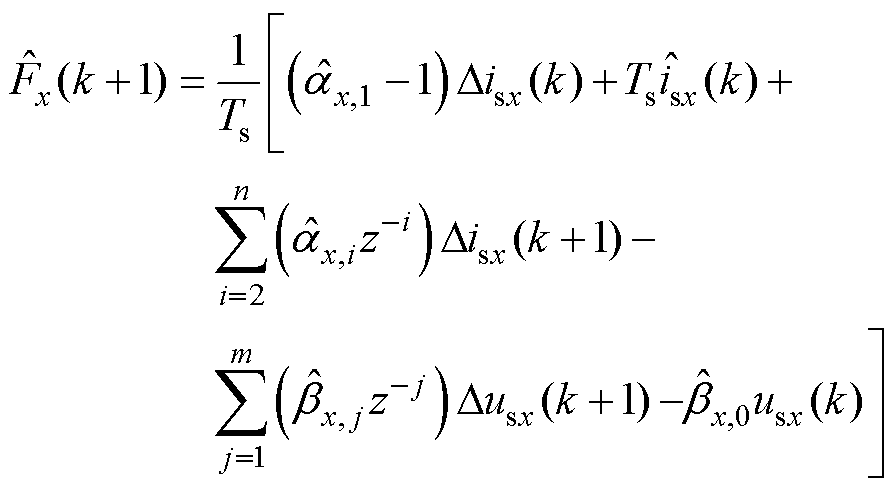
式中,下标x表示分量所处坐标系d或q;n和m分别为电流梯度部分和电压梯度部分的模型阶数;ax,i和bx, j为模型系数,通常采用RLS在线估算,保持模型良好适配性。为保证系统因果持续存在,模型系数bx,0≠0。
为实现电流预测,使用时移获得未来电流分量,有
 (5)
(5)
式中, 和
和 分别为集总第k个采样周期的变量梯度值和模型系数;上标“
分别为集总第k个采样周期的变量梯度值和模型系数;上标“ ”为变量估算值。矢量中,元素
”为变量估算值。矢量中,元素 的
的 项采用其未来参考值
项采用其未来参考值 替代,该值采用拉格朗日外推法求得。
替代,该值采用拉格朗日外推法求得。
可以看出,物理模型存在多项时变物理参数。随着运行状态改变,模型处于失配状态,系统性能将受到较大预测误差的负面影响。而数据模型依赖采样数据实时更新,完全消除物理参数及其影响。
在连续多个采样周期内出现静态数据时,数据模型的更新频率下降,即为发生停滞。由于停滞影响模型适配性,系统控制性能劣化,该现象称作停滞效应。对于直接基于采样数据的数据模型(如超局部模型、时间序列模型等),可视作间接延长控制时域;而对于基于数据梯度的数据模型(如查找表模型、泛模型等),连续多周期为零的梯度值将导致更新频率降低。若连续周期数超过模型维度,将造成模型更新算法出现恒等,递归矢量计算和估算结果异常,无法捕捉电机系统运动状态,进而使模型适配性降低,预测误差增大,威胁系统稳定性。
所提方法基本结构如图1所示,主要包括两个部分:陷波抗停滞和控制策略部分,其中后者主要包含预测和滑模成分。下面分别对各部分和成分进行分析。
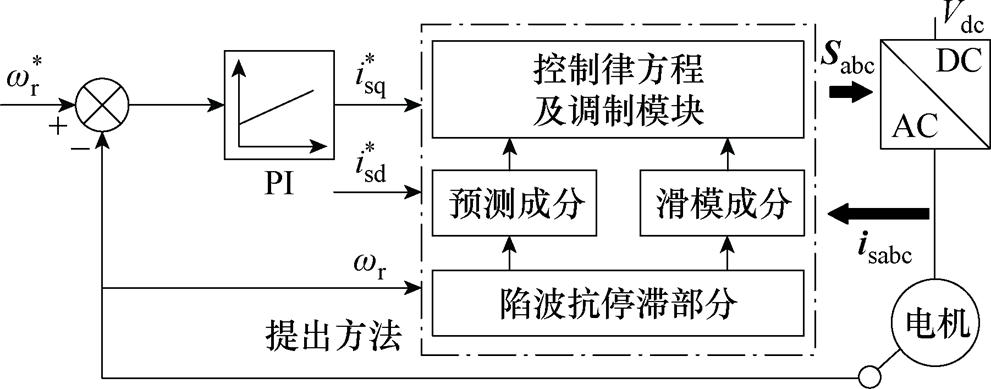
图1 所提方法基本结构
Fig.1 Basic structure of the proposed method
电机引发的谐波有多个方面,包含转速变化、气隙磁场畸变、齿槽转矩等,而控制策略引起的无效成分多分布在高频段,如谐波耦合效应、边频效应等。为部分提取采样数据中无效成分,在ab坐标系下设计陷波结构为
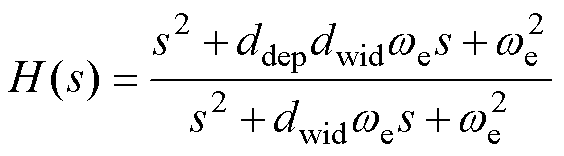 (6)
(6)
式中,s为拉普拉斯变换域中复频域变量;ddep为陷波深度;dwid为陷波宽度;we为基波角频率,陷波中心频率对准相电流基波角频率we。不同深度和宽度下,电机额定状态运行下的陷波结构伯德图如图2所示。可以看出,随着陷波宽度dwid增加,幅频特性陷波中心频率位置所呈夹角变大。即较大的陷波宽度dwid便于电机引发的谐波通过,提取无效成分;随着陷波深度dwid增加,陷波中心频率附近频段的陷波效果弱化,甚至在陷波深度dwid>5时,该结构不再具备陷波功能。
为数字实现式(6)中传递函数,采用双线性变换将其离散化为H(z-1)。在此基础上,发生停滞时,经过Park变换后,在采样数据中反相注入陷波结果,代入式(5)以更新模型。即用于更新模型的数据为
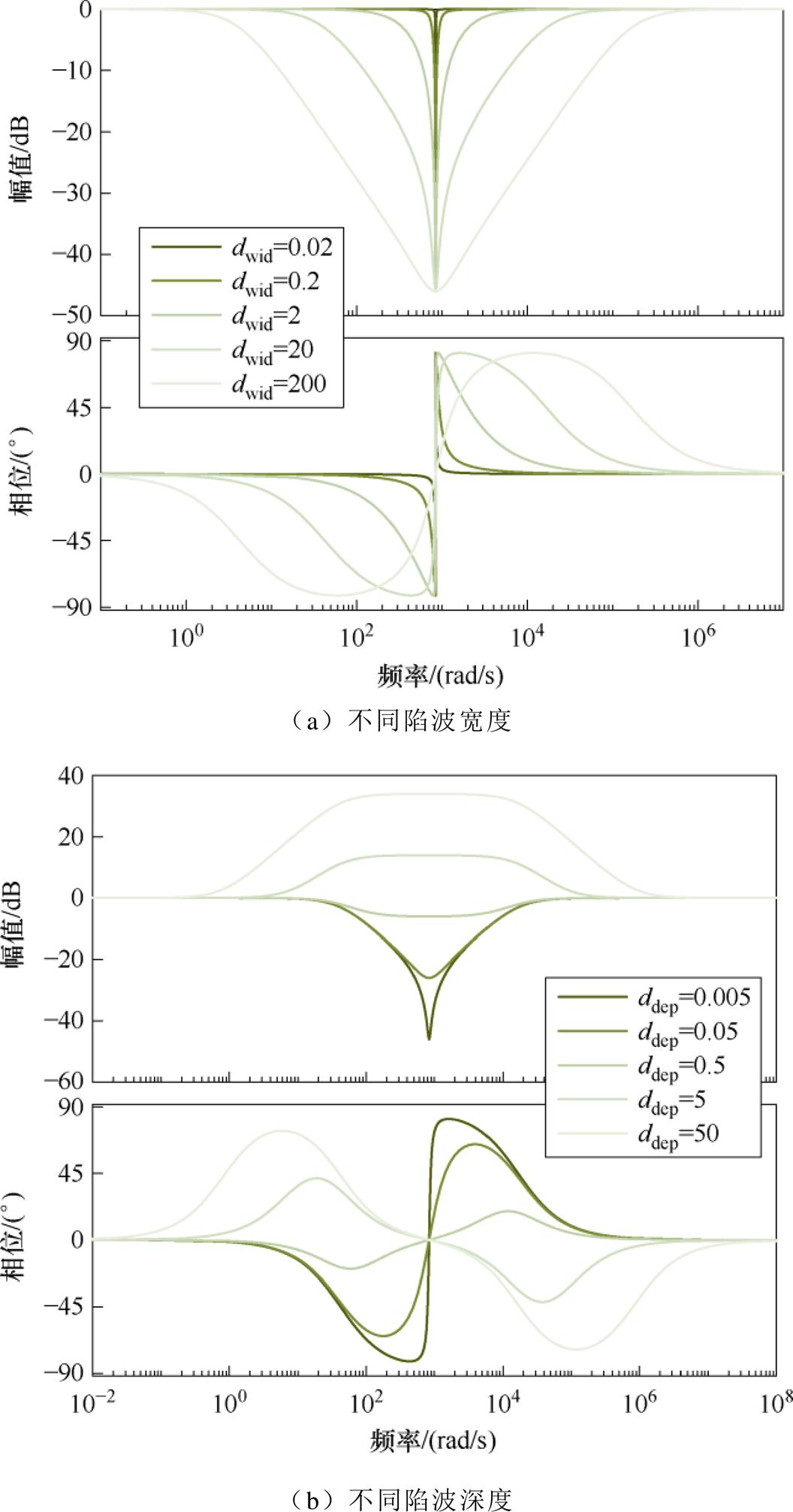
图2 陷波结构伯德图
Fig.2 Bode diagram of the notch term
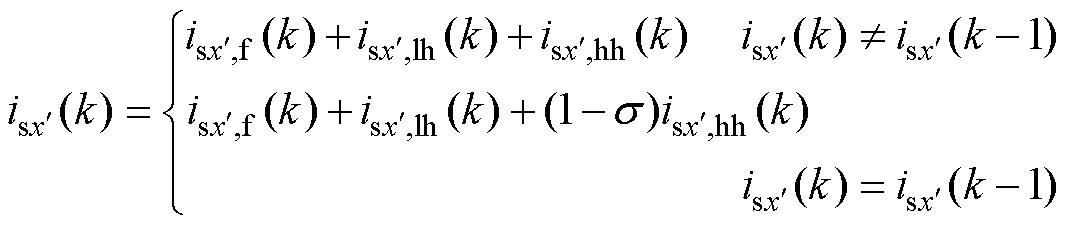 (7)
(7)
式中,下标 表示分量所处坐标系a或b;
表示分量所处坐标系a或b; 为基波成分;
为基波成分; 为低频谐波成分;
为低频谐波成分; 为高频谐波成分;
为高频谐波成分; 为陷波结构提取的无效成分占比。在发生停滞时,高频段谐波含量将部分消除,产生强制梯度。离散化后陷波结构实现如图3所示。
为陷波结构提取的无效成分占比。在发生停滞时,高频段谐波含量将部分消除,产生强制梯度。离散化后陷波结构实现如图3所示。
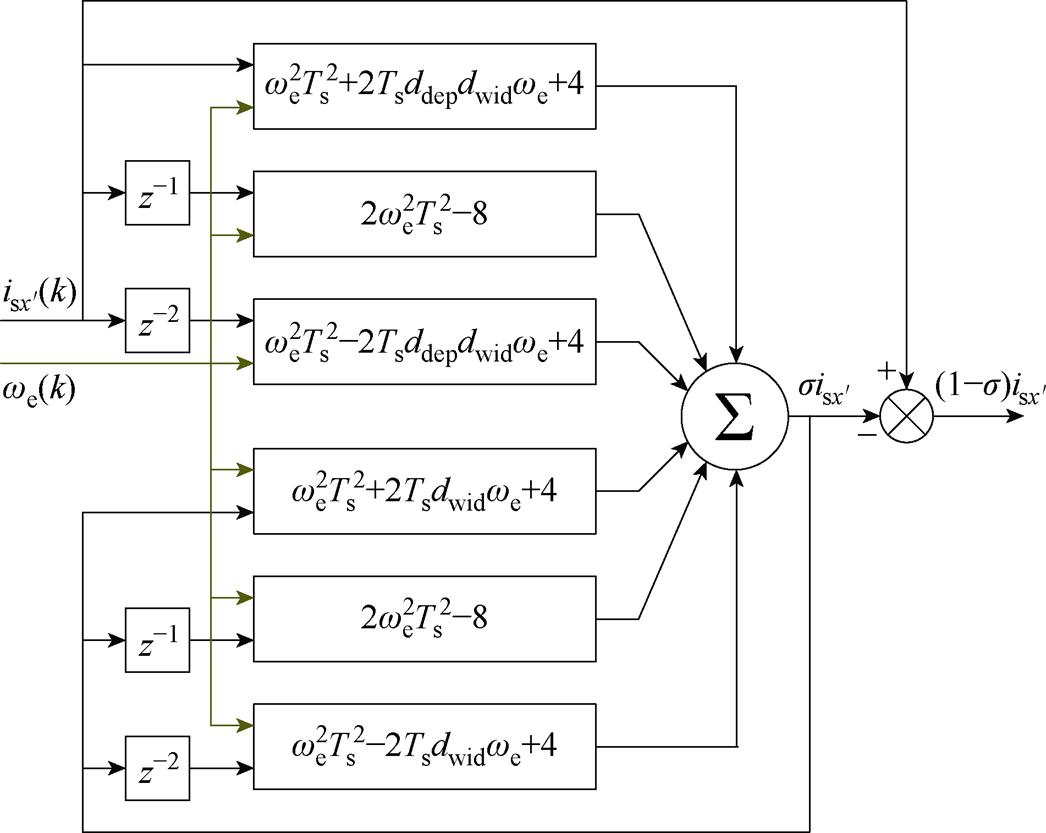
图3 离散化陷波结构实现
Fig.3 Implementation of the discretized notch term
2.2.1 预测成分
建立式(3)所示泛模型,并通过式(5)中时移进行预测。通过文献[13]中模型超局部化思想,将泛模型变化为超局部模型。其中,集总变量为
 (8)
(8)
输入增益为
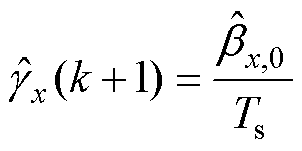 (9)
(9)
并依据该模型设计预测成分智能比例(IP)控制方程
 (10)
(10)
式中,kp为比例系数。
2.2.2 滑模成分
分别定义状态变量x1和x2为
 (11)
(11)
设计非奇异快速滑模面为
 (12)
(12)
将误差状态变量保持在滑模面滑动,滑模成分控制方程为
 (13)
(13)
式中,b1、b2、g1和g2为滑模面系数,是正常数,g1和g2满足关系0<g1<1和g2=2g1/(1+g1);d为可调系数。滑模成分控制方程包含等效控制律和切换控制律两部分。式(13)中第一项为等效控制律,使误差状态变量在滑模面上运动;第二项为切换控制律,用于驱动状态变量向滑模面收敛。将预测成分控制方程视作理想状态运动,系统能够在存在外部扰动和模型不确定性的情况下实现稳定运行。
若将预测成分视作主控制策略,滑模成分为状态补偿项,可将式(10)和式(13)直接求和作为控制律方程,有
 (14)
(14)
2.3.1 滑模成分可达性
根据滑模控制理论,系统需满足运动条件为
 (15)
(15)
即
 (16)
(16)
设计李雅普诺夫方程为
 (17)
(17)
对其求导可得
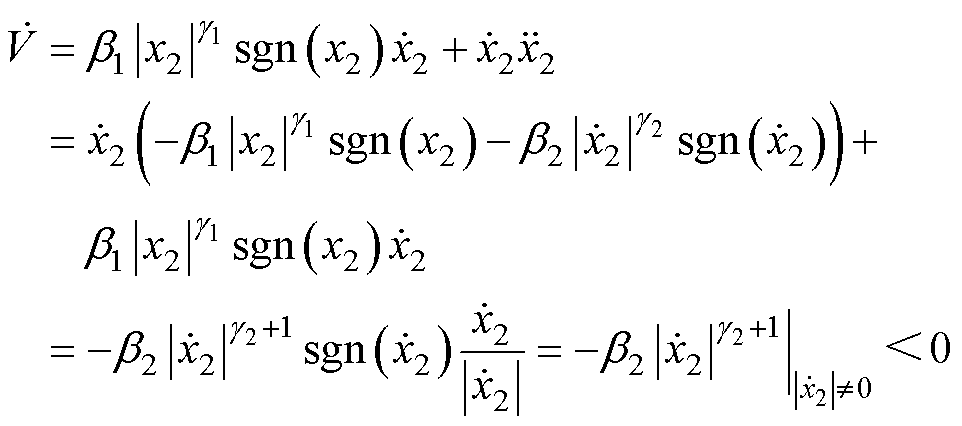 (18)
(18)
结合式(17)和式(18),式(16)的原点位于稳定区间,状态变量在有限时间内趋近于零。
2.3.2 系统稳定性
在离散域下简化控制系统,如图4所示。图中,isx1为模型更新用数据,isx为采样数据,J为惯性系数,B为阻尼系数,p为极对数,TL为负载转矩,qr为转子位置。
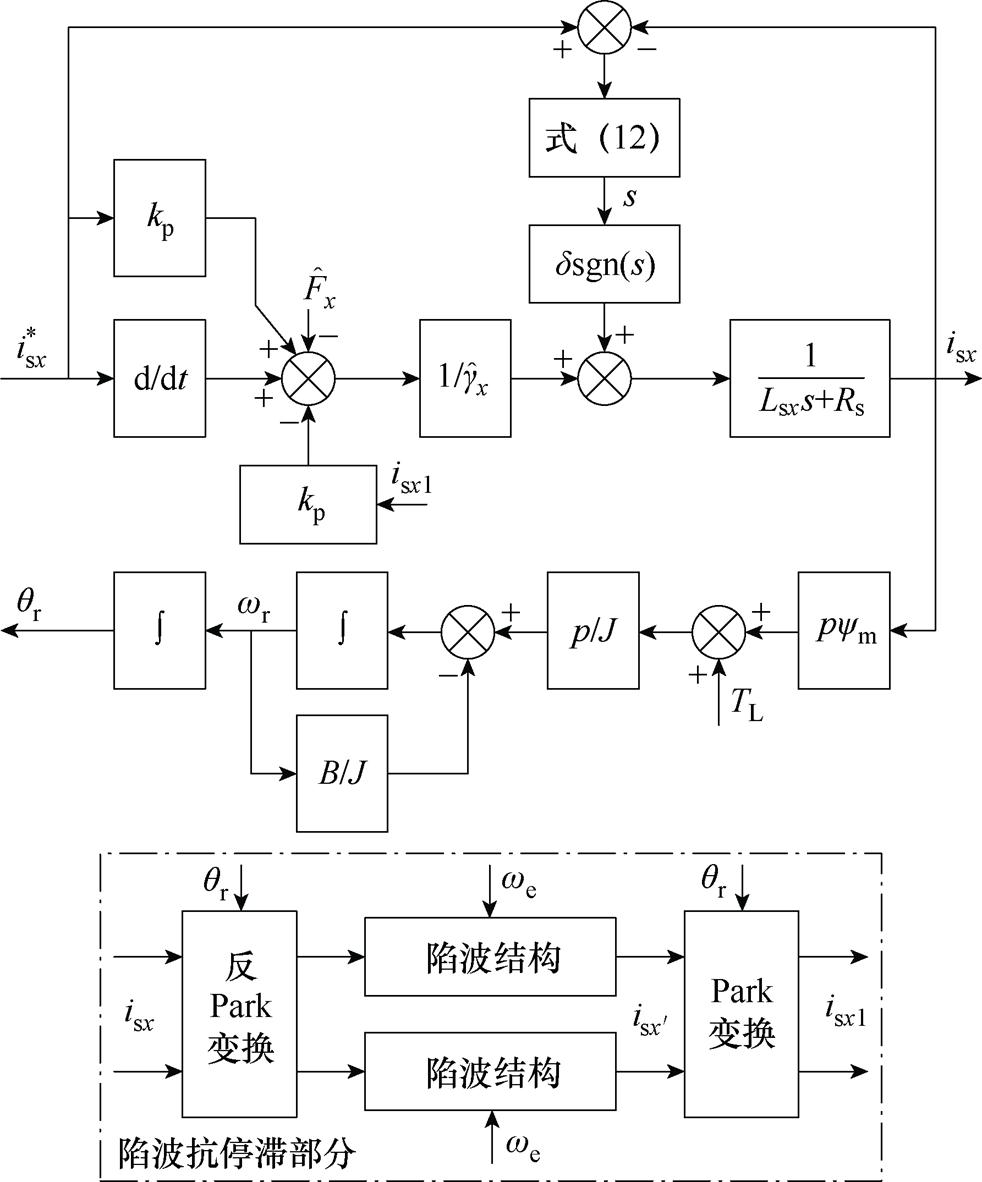
图4 简化控制系统结构
Fig.4 Structure of the simplified control system
对于闭环系统稳态运行过程连续采样4次,单次采样线性化零极点分布如图5所示,其余采样有相同的分布和轨迹。可以看出,系统所有极点均位于虚轴左侧,主导极点有充足裕度保持系统稳定。
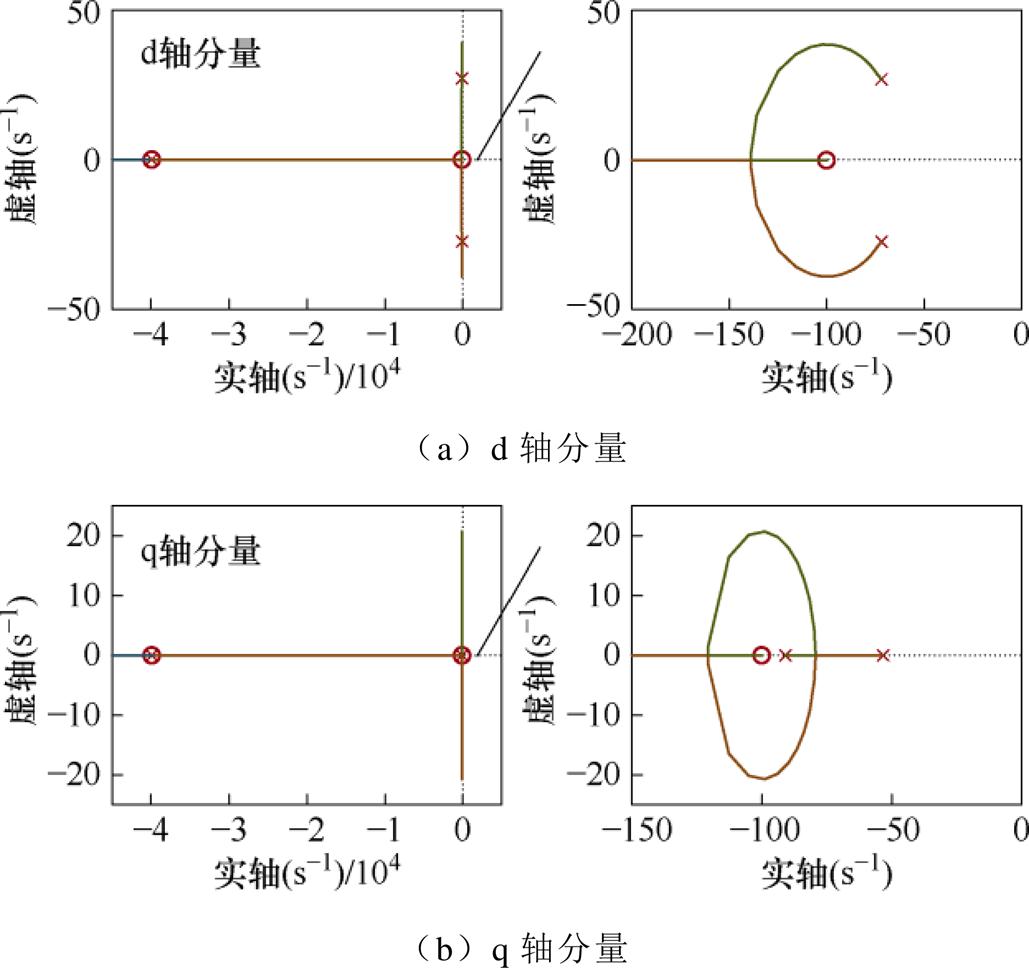
图5 控制系统稳态过程零极点分布
Fig.5 Pole and zero maps for the control system within steady-state
对于动态过程中测试结果,分别在负载变化(从4~11.5 N·m)和转速变化(从500~1 000 r/min)过程中,连续采集4次数据。测试结果分别如图6和图7所示。可以看出,负载变化暂态过程中d轴分量共轭主导极点向虚轴靠近,运动过程与实轴垂直;q轴分量零极点基本不动,与图5b分布基本一致。转速变化暂态过程中,d轴和q轴分量的零极点分布几乎未发生改变,与图5分布基本一致。因此,负载变化过程系统极点仍分布在虚轴左侧,系统可保持稳定运行。
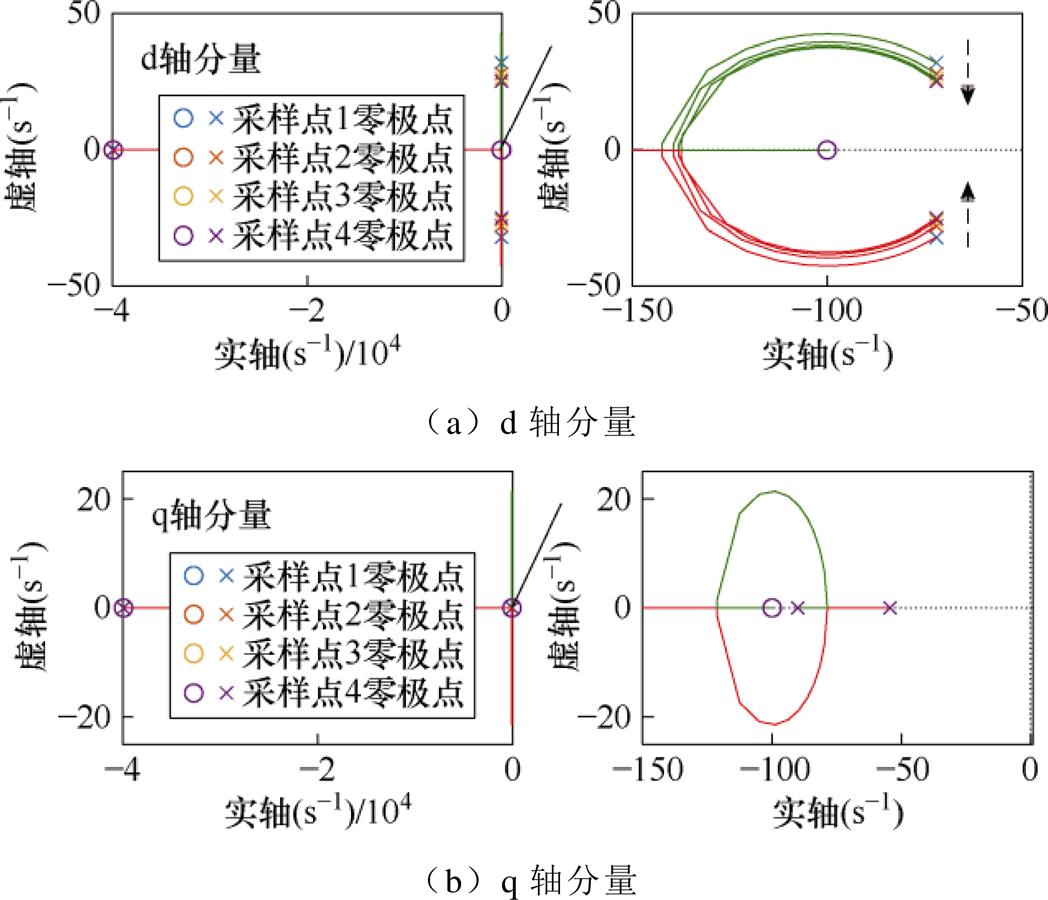
图6 控制系统负载变化暂态过程零极点分布
Fig.6 Pole and zero maps for the control system within transient-state of changing load
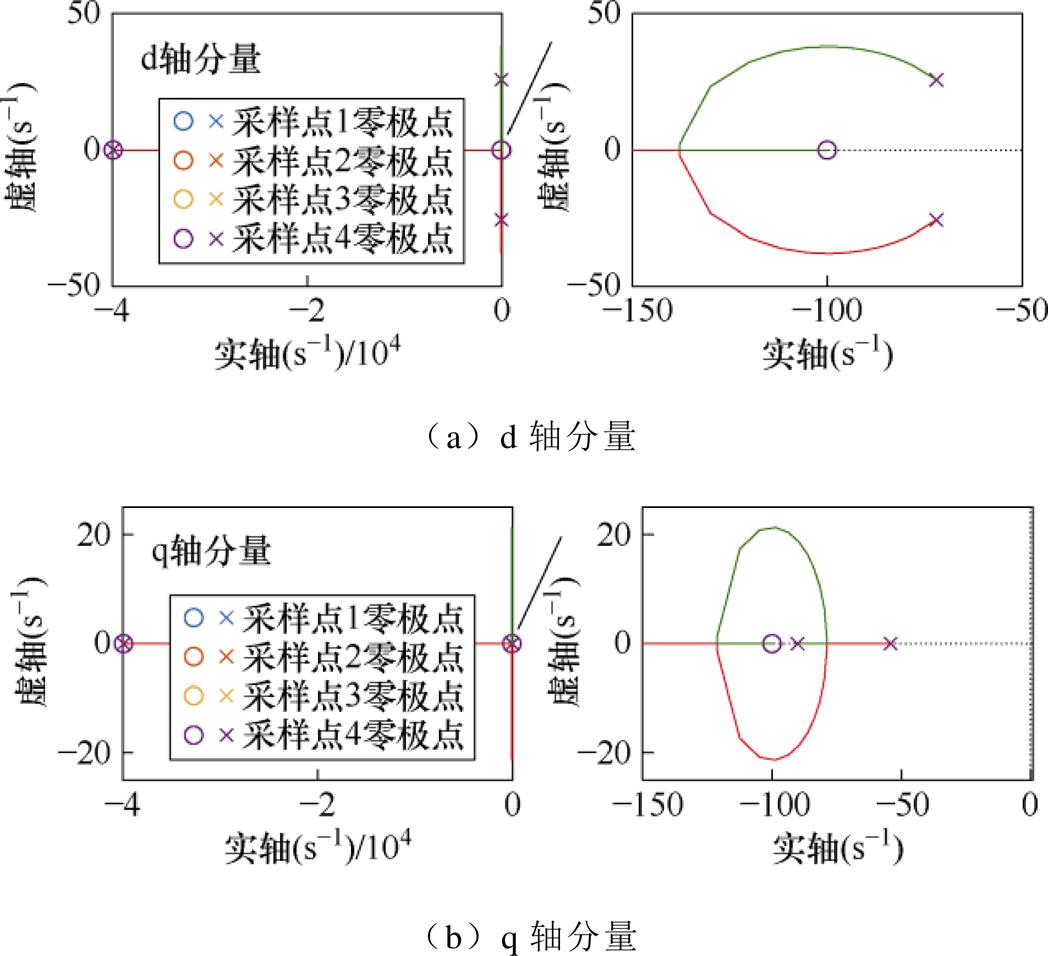
图7 控制系统转速变化暂态过程零极点分布
Fig.7 Pole and zero maps for the control system within transient-state of changing speed
2.3.3 系统鲁棒性
控制方法所需参数见表1。表中,l1为RLS算法中遗忘因子;g、k、l、c均为文献[9]方法待定系数。可以看出,所提方法与文献[9]方法类似,各部分和成分均无需物理参数参与,系统鲁棒性得到有效增强。
表1 控制方法主要参数比较
Tab.1 Comparison of main parameter for control methods
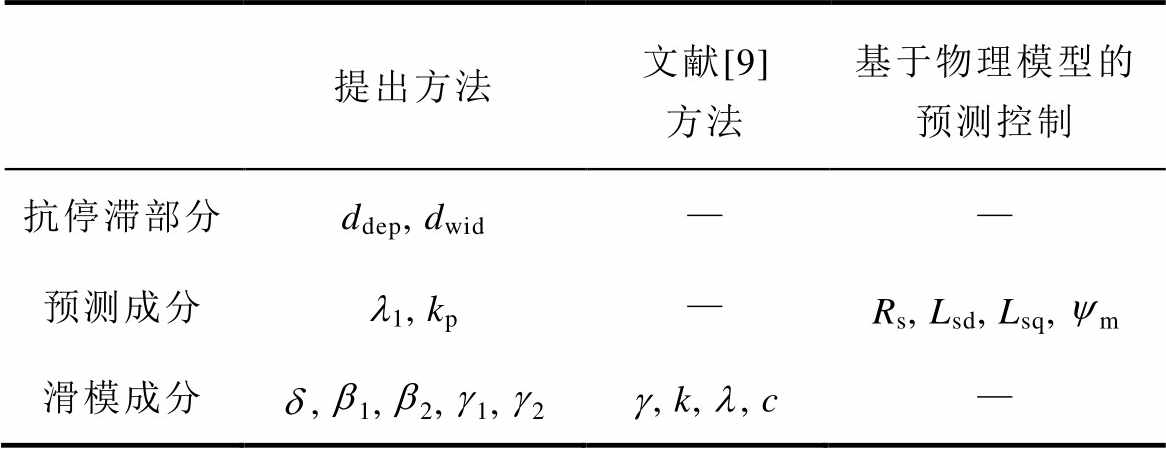
提出方法文献[9]方法基于物理模型的预测控制 抗停滞部分ddep, dwid—— 预测成分l1, kp—Rs, Lsd, Lsq, ym 滑模成分d,b1, b2, g1, g2g, k, l, c—
此外,由于陷波抗停滞部分直接对采样数据进行处理,不受数据模型类型、更新过程和估算算法等约束,独立于系统鲁棒性的同时有良好通用性。
2.3.4 估算算法收敛和稳定性
方法采用RLS对模型系数进行估算。根据文献[26],存在以下定义:
定义1:被控对象输入输出关系可描述为最小二乘格式,利用数据序列,极小化以下二次型准则函数。
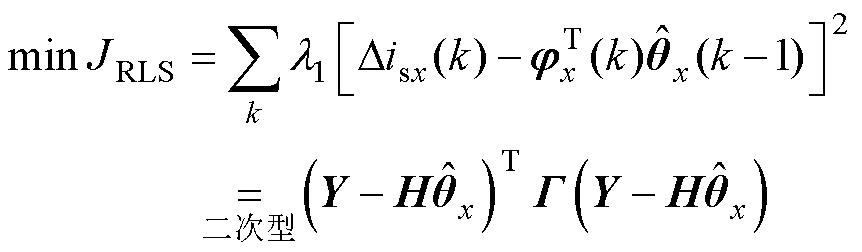 (19)
(19)
式中,矩阵Y、H和Γ分别集总状态变量梯度Disx、递归矢量jx和遗忘因子l1。
RLS算法的收敛和稳定性证明的实现主要包括两个步骤,一是解的存在性,二是解的一致性。
定理1(存在性):存在唯一的估计值,使式(19)中准则函数最小化。
定理2(一致性):如果插入的噪声是白噪声,则最小二乘参数估计是一致收敛的,即
 (20)
(20)
式中,L为数据长度; 为实际值。
为实际值。
根据RLS的存在性和一致性,在数据长度趋近于无穷大时,估计结果的误差收敛至零。实际运行中,数据长度为正整数,即L∈Z+,极限结果收敛至较小固定值,可确保系统收敛性,系统可稳定运行。
所提方法验证所用实验平台如图8所示,主要实验参数见表2。平台采用DSP F28379D作为控制核心驱动4.8 kW PMSM。
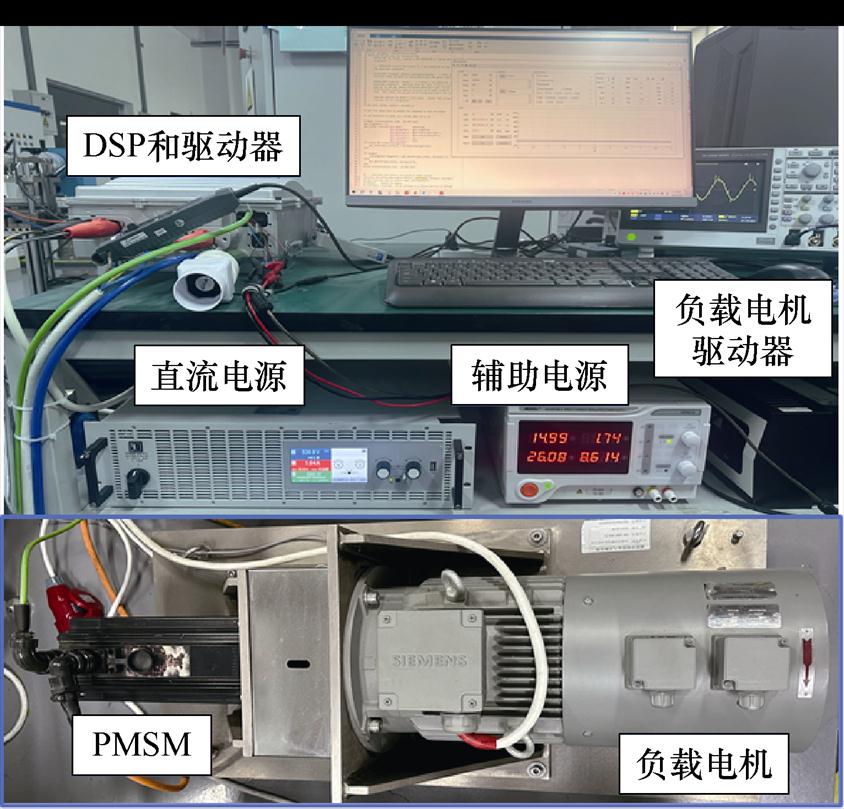
图8 实验平台
Fig.8 Experimental platform
设定系统初始运行条件为参考转速1 000 r/min、负载转矩4.6 N·m。分别将负载转矩修改至11.5 N·m并恢复,参考转速分别修改为1 500、1 000、500和-500 r/min。所提方法的实验波形如图9所示,包括在1 000 r/min和4.6 N·m、11.5 N·m稳态运行条件下的放大波形。可以看出,所提方法成功跟随给定、抵抗扰动。在两种稳态运行条件下,相电流有良好正弦度,相同采样时间段内停滞发生次数均为8次。
表2 实验平台主要参数
Tab.2 Main parameter of the experimental platform
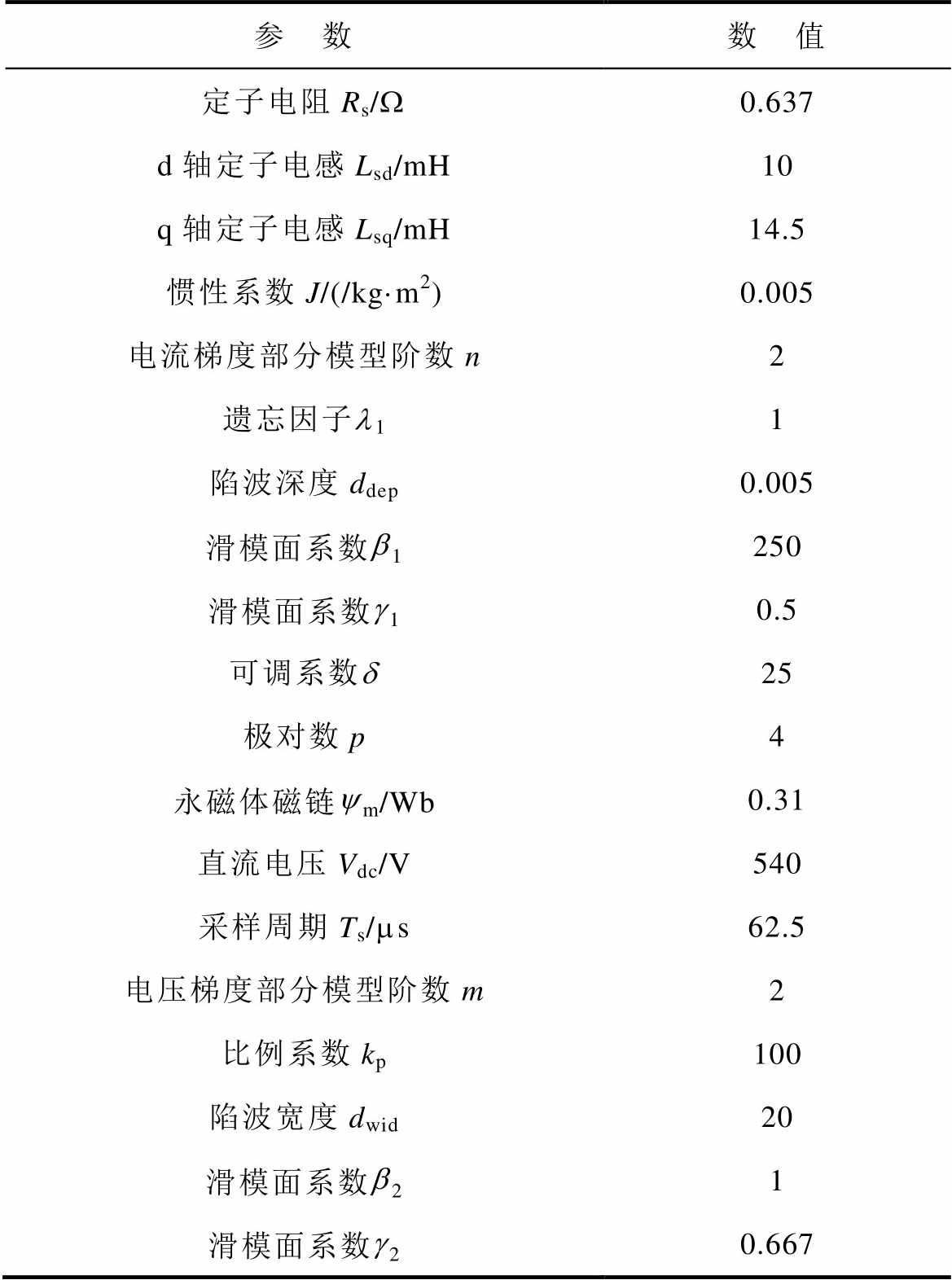
参 数数 值 定子电阻Rs/W0.637 d轴定子电感Lsd/mH10 q轴定子电感Lsq/mH14.5 惯性系数J/(/kg·m2)0.005 电流梯度部分模型阶数n2 遗忘因子l11 陷波深度ddep0.005 滑模面系数b1250 滑模面系数g10.5 可调系数d25 极对数p4 永磁体磁链ym/Wb0.31 直流电压Vdc/V540 采样周期Ts/ms62.5 电压梯度部分模型阶数m2 比例系数kp100 陷波宽度dwid20 滑模面系数b21 滑模面系数g20.667
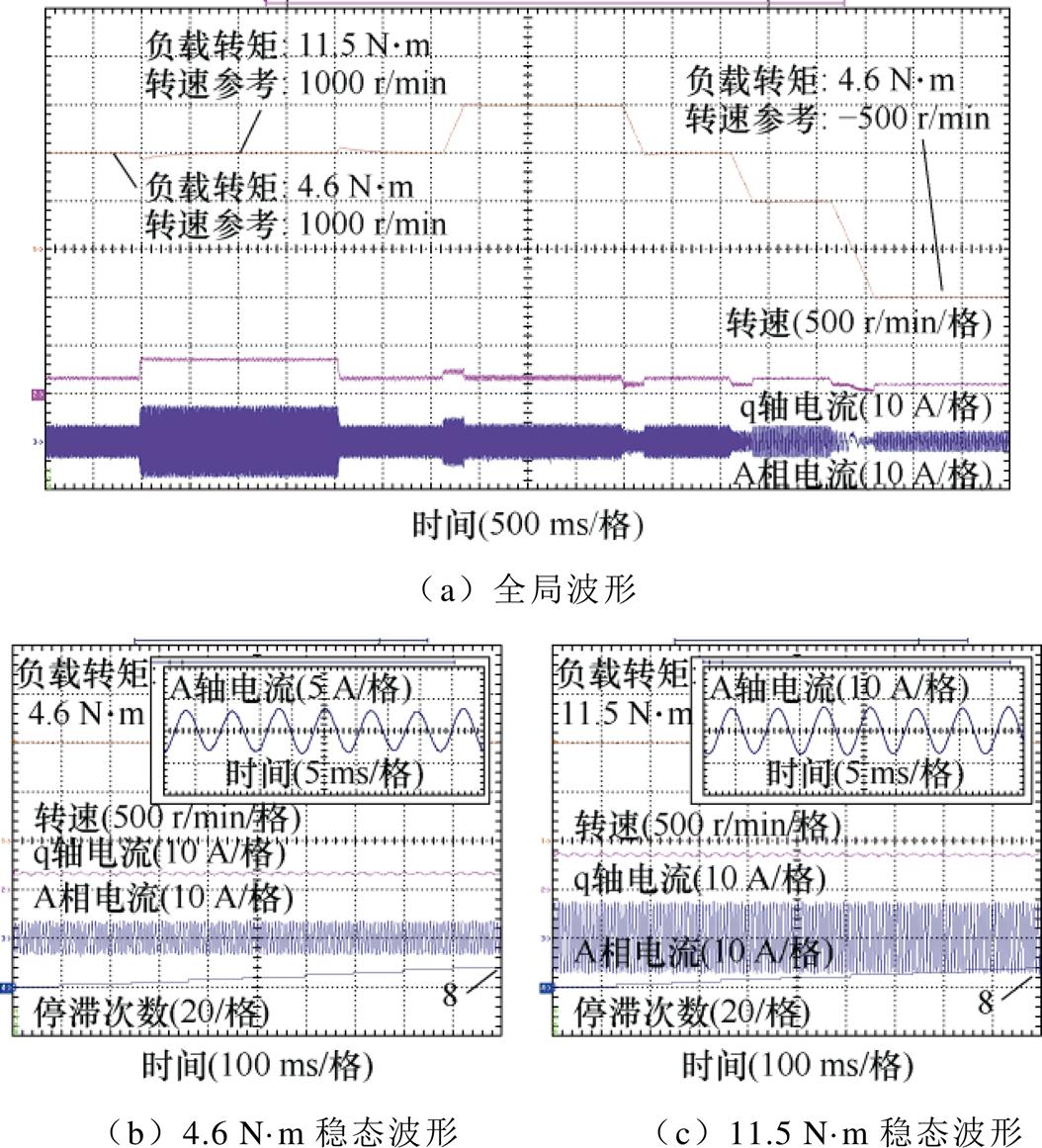
图9 提出方法实验结果
Fig.9 Experimental waveforms of the proposed method
将不存在陷波抗停滞部分的无模型预测电流滑模控制称为比较方法。相同测试条件下,实验波形如图10所示。根据图1结构,测试中转速外环使用完全相同的比例积分(Proportional-Integral, PI)控制器,图9和图10所得动态性能受到相同外环带宽限制而基本相同。相同稳态测试条件下,比较方法停滞发生次数分别为382和339次。

图10 比较方法实验波形
Fig.10 Experimental waveforms of the compared method
电流质量比较如图11所示。相电流总谐波畸变率(Total Harmonic Distortion, THD)在图11中表示,其中连续傅里叶分析结果在连续1 000个采样点内获得。可以看出,比较方法受到更明显的停滞效应影响,5次、7次等谐波含量上升。两个稳态过程中THD均值相较于所提方法分别提高4.61%和6.74%,电流质量下降。
式(5)的预测电流与实际采样电流之间的误差可直接用来分析无模型预测滑模控制方法中数据模型适配性。所提方法与比较方法的预测误差范围如图12所示。可以看出,提出方法利用无效成分削减停滞效应影响,稳态下预测精度分别改进4.58%和10.47%,有效改善了数据模型适配性。
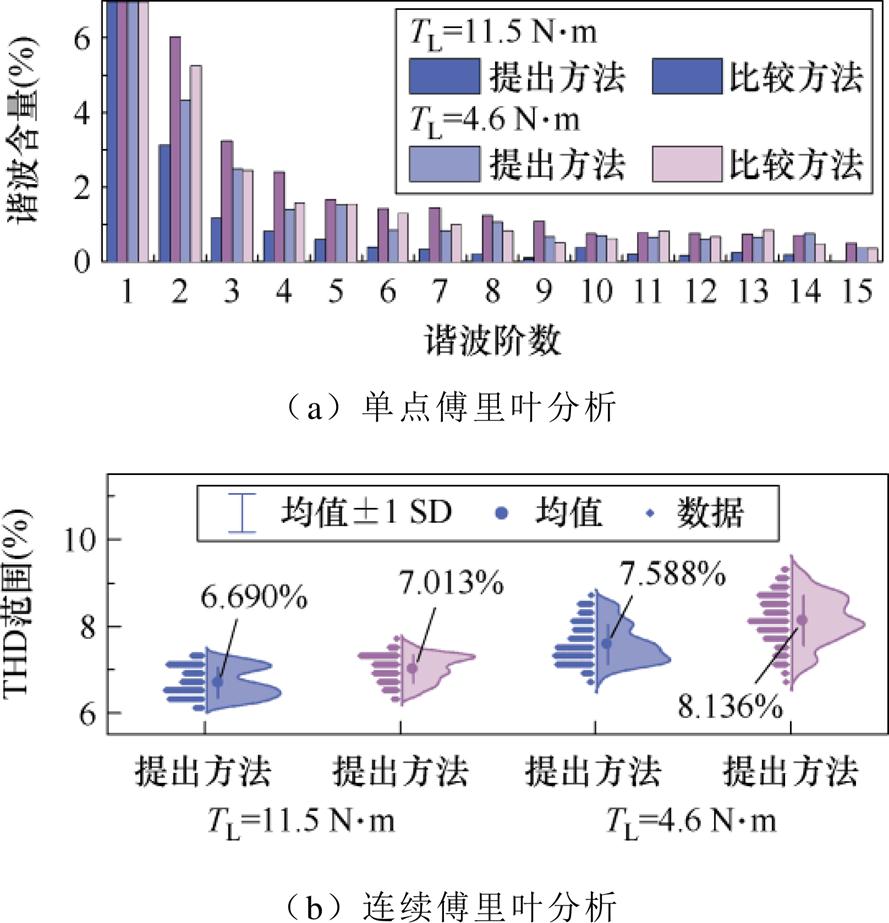
图11 电流质量比较
Fig.11 Comparison of current quality
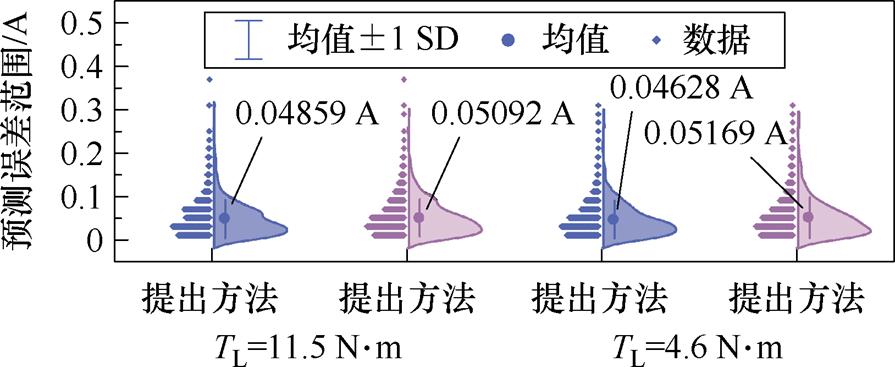
图12 预测误差比较
Fig.12 Comparison of prediction errors
提出方法和比较方法的部分典型性能指标见表3,其中转速积分时间和绝对误差(Integrated Time and Absolute Error, ITAE)同样在稳态过程中连续1 000个采样周期内计算获得。所提方法由于有效降低停滞发生概率,稳态性能指标均有所提升,可持续获得良好质量的相电流。
表3 控制方法典型性能指标比较
Tab.3 Comparison of typical performance indexes for control methods
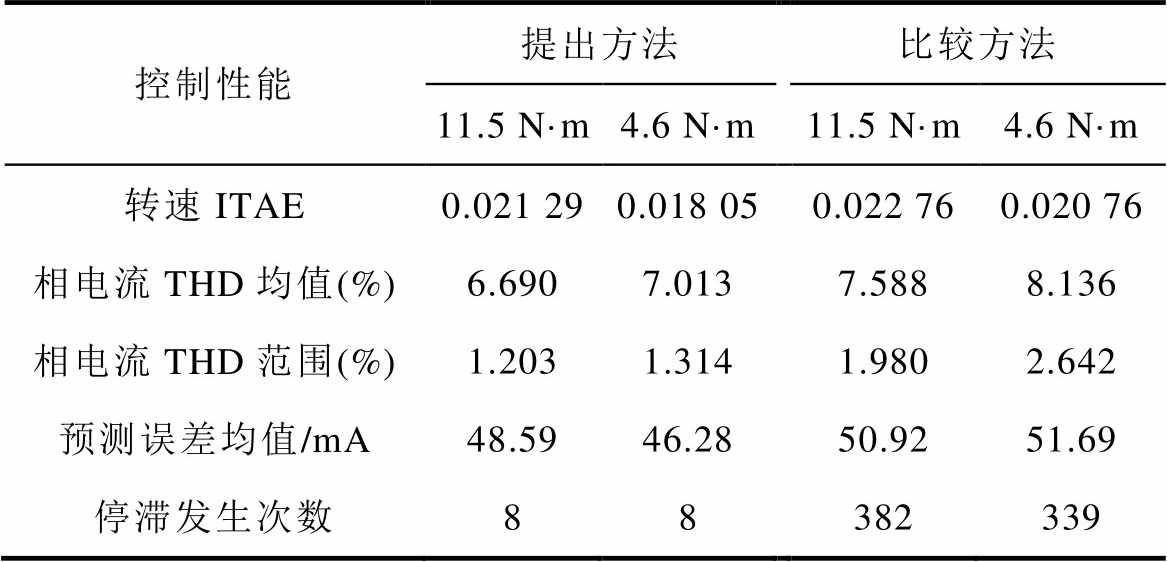
控制性能提出方法比较方法 11.5 N·m4.6 N·m11.5 N·m4.6 N·m 转速ITAE0.021 290.018 050.022 760.020 76 相电流THD均值(%)6.6907.0137.5888.136 相电流THD范围(%)1.2031.3141.9802.642 预测误差均值/mA48.5946.2850.9251.69 停滞发生次数88382339
与文献[9]中无模型滑模控制相比较,分析系统鲁棒性。文献[9]方法中采用超局部数据模型,其输入增益通常按照物理模型对应选取,在电流环中为
 (19)
(19)
设定参数失配条件:控制策略中Lsx取值为3Lsx。在1 000 r/min运行速度和11.5 N·m负载转矩条件下,所提方法和文献[9]方法所得相电流分布如图13所示。其中,由于提出方法设计上摒弃所有物理参数依赖,其鲁棒性测试利用文献[9](包含参数不匹配情况)的数据作为初始训练集,完成启动阶段模型构建后,无缝过渡到采用式(3)和式(14)进行数据模型的更新与后续操作。可以看出,所提方法相电流呈圆形分布,运行性能不受参数失配影响,有强系统鲁棒性;而文献[9]方法由于弱鲁棒性,电流质量下降明显,致使相电流呈环状分布。
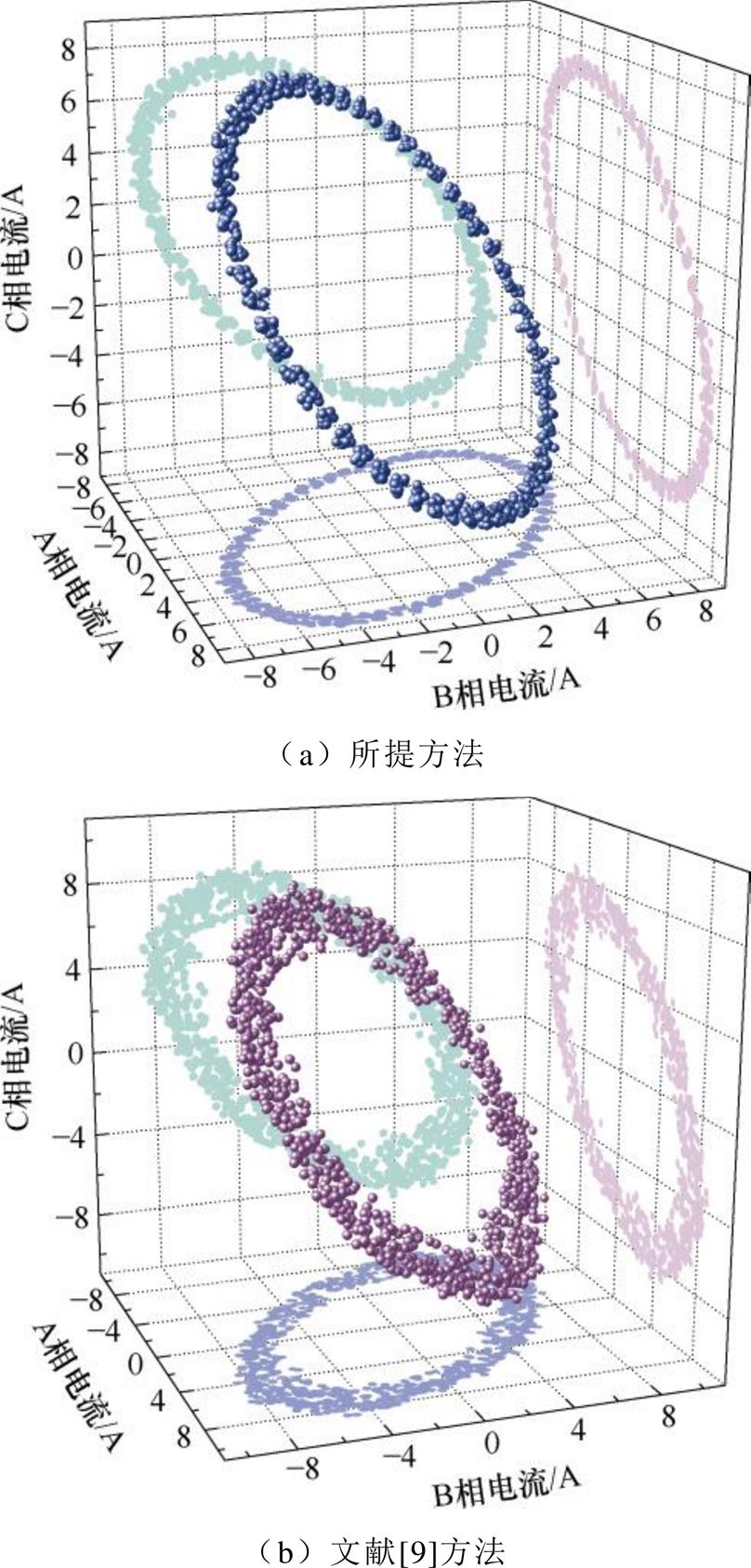
图13 失配条件下相电流分布
Fig.13 Phase current distributions under parameter mismatching condition
比例增益是智能比例控制方程产生的参数。根据文献[27]所述,系统稳定性和鲁棒性都直接受到该增益取值的影响。选取测试范围[50, 300],对系统相电流THD进行测试,测试结果如图14所示。可以看出,随着输入增益上升,系统电流质量改善,但更加接近稳定范围边界。由于不同运行状态对于比例增益取值的要求和范围不同,选取输入增益为100,保证系统稳定运行。
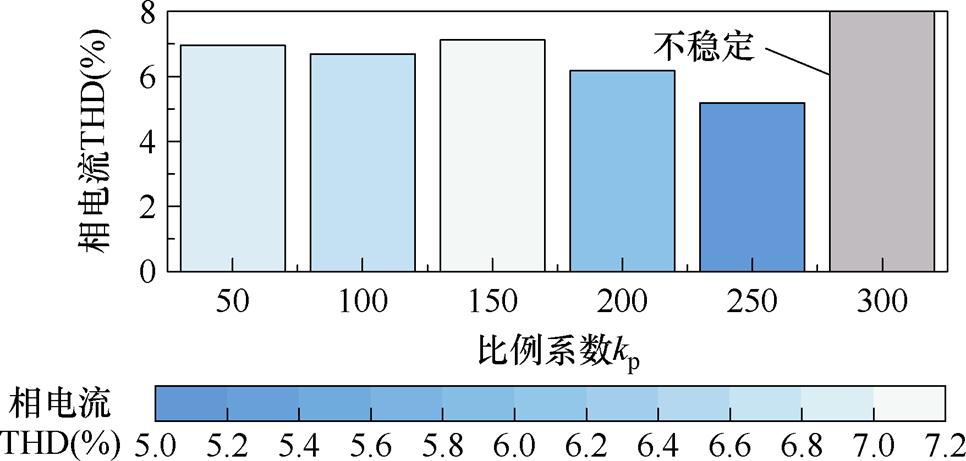
图14 不同比例系数相电流THD测试结果
Fig.14 Testing results of phase current THD with different proportional coefficients
遗忘因子是最小二乘估算过程产生的参数,通常在[0.9, 1]区间选择,是算法抗扰性和快速性的折中。在估算过程中,为最大程度衰减系统噪声敏感度,遗忘因子选定为1。
滑模面系数是在设计滑模面过程中产生的参数,其中可调系数d取决于系统对收敛速度和抖振抑制的需求。在确定基本约束条件后,对各系数进行枚举测试。测试结果如图15所示。由于提出方法以电流控制为首要目标,因此需选择最小相电流THD所对应的各参数进行工作。
针对无模型预测滑模控制中停滞及停滞效应问题,本文提出了一种基于陷波抗停滞的永磁同步电机无模型预测电流滑模控制方法。该方法核心在于引入陷波抗停滞机制,巧妙识别并利用采样数据中的无效部分,通过陷波结构实现这些成分的部分提取。在发生停滞时,方法通过反相注入无效成分,主动激发采样数据梯度变化,从而有效降低停滞现象的发生概率,提升控制模型的适配性。通过深入的理论推导与实验验证,充分证明提出方法的可行性与有效性。对比分析展示本方法在提升电流质量及增强预测精度方面的优势,为PMSM在复杂环境下的高性能控制提供新的思路与解决方案。
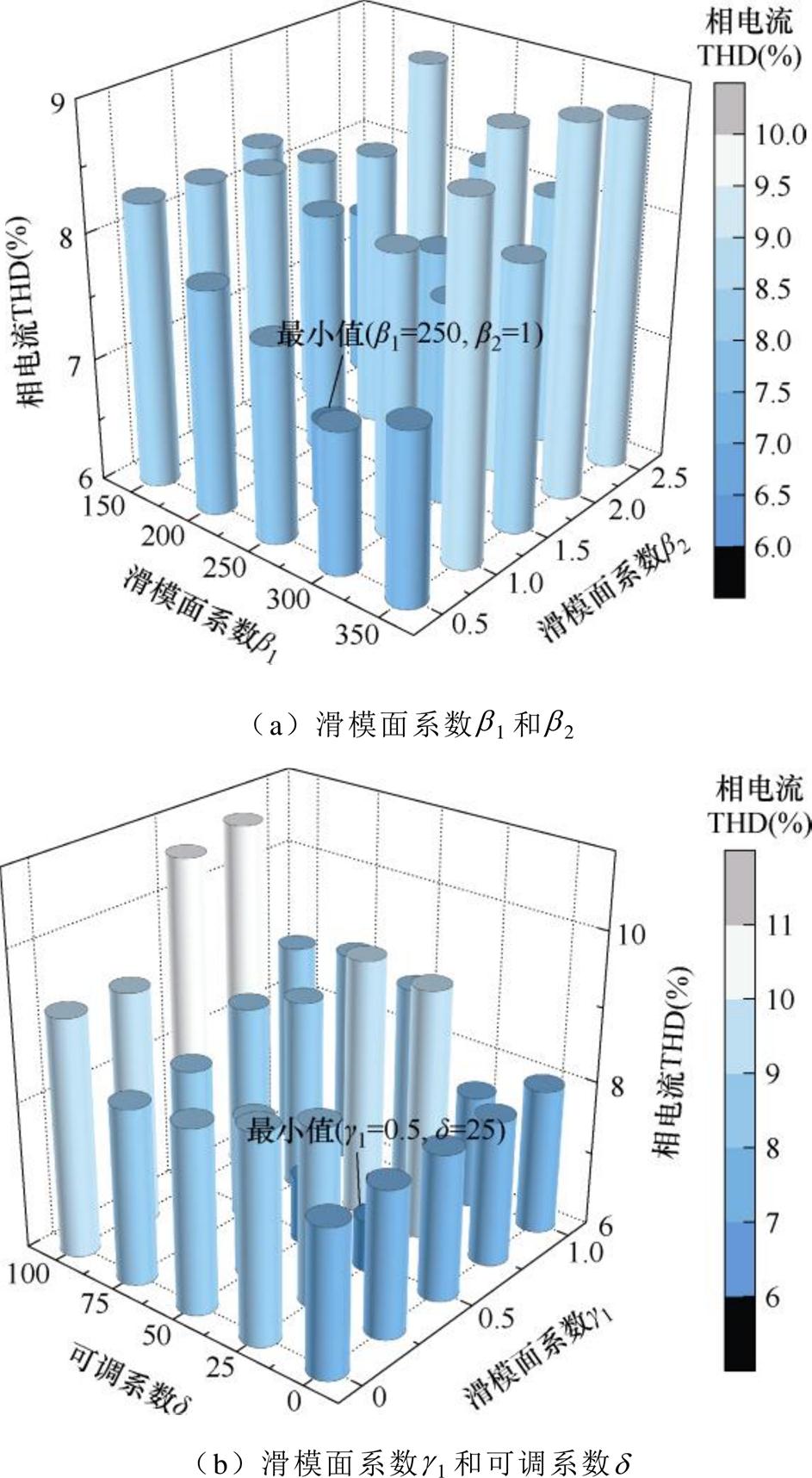
图15 不同滑模面系数相电流THD测试结果
Fig.15 Testing results of phase current THD with different sliding mode plane coefficients
参考文献
[1] 甘醇, 曲荣海, 石昊晨, 等. 宽调速永磁同步电机全域高效运行控制策略综述[J]. 中国电机工程学报, 2023, 43(7): 2496-2512.
Gan Chun, Qu Ronghai, Shi Haochen, et al. Review of high-efficiency control strategy for permanent magnet synchronous motors under wide speed range[J]. Proceedings of the CSEE, 2023, 43(7): 2496-2512.
[2] 肖虎, 吴公平, 龙卓, 等. 参数失配下永磁同步电机无模型定子磁链滑模控制[J]. 电工技术学报, 2025, 40(12): 3883-3894.
Xiao Hu, Wu Gongping, Long Zhuo, et al. Model-free stator flux sliding mode control for permanent magnet synchronous motors considering parameter mis- match[J]. Transactions of China Electrotechnical Society, 2025, 40(12): 3883-3894.
[3] 梅三冠, 卢闻州, 樊启高, 等. 基于滑模观测器误差补偿的永磁同步电机无位置传感器控制策略[J]. 电工技术学报, 2023, 38(2): 398-408.
Mei Sanguan, Lu Wenzhou, Fan Qigao, et al. Sensor- less control strategy of permanent magnet syn- chronous motor based on error compensation esti- mated by sliding mode observer[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 398-408.
[4] 曹亚丽, 曹竣奥, 宋昕, 等. 一种改进滑模观测器的PMSM矢量控制研究[J]. 电力系统保护与控制, 2021, 49(16): 104-111.
Cao Yali, Cao Jun’ao, Song Xin, et al. Research on vector control of PMSM based on an improved sliding mode observer[J]. Power System Protection and Control, 2021, 49(16): 104-111.
[5] 石欣然, 刘景林, 肖明朗, 等. 基于可变边界层的PMSM滑模观测器无位置传感器控制系统设计[J]. 中国电机工程学报, 2025, 45(14): 5657-5669.
Shi Xinran, Liu Jinglin, Xiao Minglang, et al. Position sensorless control system design based on sliding mode observer using variable boundary layer for PMSM[J]. Proceedings of the CSEE, 2025, 45(14): 5657-5669.
[6] 李扬, 杨芳艳, 李清都, 等. 永磁同步电机全局积分终端滑模矢量控制[J]. 电力系统及其自动化学报, 2025, 37(4): 21-29.
Li Yang, Yang Fangyan, Li Qingdu, et al. Global integral terminal sliding mode vector control of permanent magnet synchronous motor[J]. Proceedings of the CSU-EPSA, 2025, 37(4): 21-29.
[7] 廖凯举, 徐伟, 葛健, 等. 基于积分滑模观测器的直线振荡电机谐振频率跟踪控制[J]. 电工技术学报, 2024, 39(14): 4366-4376.
Liao Kaiju, Xu Wei, Ge Jian, et al. Resonant frequency tracking control of linear oscillatory machine based on integral sliding mode observer[J]. Transactions of China Electrotechnical Society, 2024, 39(14): 4366-4376.
[8] 史婷娜, 赵梦圆, 夏长亮. 基于数据驱动观测器的永磁同步电机显式模型预测直接速度控制[J]. 中国电机工程学报, 2025, 45(4): 1248-1260.
Shi Tingna, Zhao Mengyuan, Xia Changliang. Explicit model predictive direct speed control strategy for permanent magnet synchronous motors based on data driven observer[J]. Proceedings of the CSEE, 2025, 45(4): 1248-1260.
[9] 赵凯辉, 殷童欢, 张昌凡, 等. 永磁同步电机无模型滑模控制方法研究[J]. 电子测量与仪器学报, 2018, 32(4): 172-180.
Zhao Kaihui, Yin Tonghuan, Zhang Changfan, et al. Research on model-free sliding mode control of permanent magnet synchronous motor[J]. Journal of Electronic Measurement and Instrumentation, 2018, 32(4): 172-180.
[10] 杨公德, 杨雲静, 林明耀. 基于超螺旋积分滑模观测器的永磁同步电机三矢量无模型预测电流控制[J]. 中国电机工程学报, 2025, 45(16): 6505-6517.
Yang Gongde, Yang Yunjing, Lin Mingyao. Three vector model-free predictive current control of permanent magnet synchronous motor based on super- twisting integral sliding mode observer[J]. Proceedings of the CSEE, 2025, 45(16): 6505-6517.
[11] 魏尧, 汪凤翔. 基于仿射超局部的交流电机无模型预测控制策略[J]. 东北电力大学学报, 2024, 44(3): 47-54, 130.
Wei Yao, Wang Fengxiang. Affine ultra-local-based model-free predictive control strategy on AC motor drives[J]. Journal of Northeast Electric Power University, 2024, 44(3): 47-54, 130.
[12] 尹政, 邓富金, 王青松, 等. 双有源桥变换器移动离散控制集无模型预测电压控制策略[J]. 电工技术学报, 2025, 40(6): 1853-1863.
Yin Zheng, Deng Fujin, Wang Qingsong, et al. Model-free predictive voltage control with moving- discrete-control-set for dual active bridge con- verters[J]. Transactions of China Electrotechnical Society, 2025, 40(6): 1853-1863.
[13] 魏尧, 柯栋梁, 黄东晓, 等. 基于超局部化时间序列的永磁同步电机无模型预测电流滑模控制策略[J]. 电工技术学报, 2024, 39(4): 1022-1032.
Wei Yao, Ke Dongliang, Huang Dongxiao, et al. Model-free predictive sliding mode control using ultra-localized time-series for permanent magnet synchronous motor drives[J]. Transactions of China Electrotechnical Society, 2024, 39(4): 1022-1032.
[14] 芮涛, 徐婉伦, 胡存刚, 等. 改进的三相并网逆变器双矢量无模型预测控制策略[J]. 电工技术学报, 2025, 40(18): 6029-6039.
Rui Tao, Xu Wanlun, Hu Cungang, et al. Improved model-free predictive control strategy for three-phase grid-connected inverter with double-vector[J]. Transa- ctions of China Electrotechnical Society, 2025, 40(18): 6029-6039.
[15] Wu Wenjie, Qiu Lin, Liu Xing, et al. Dynamic- linearization-based predictive control of a voltage- source inverter[J]. IEEE Transactions on Industrial Electronics, 2024, 71(4): 3275-3284.
[16] Manzoor W A, Rawashdeh S, Mohammadi A. Vehicular applications of koopman operator theory: a survey[J]. IEEE Access, 2023, 11: 25917-25931.
[17] Rui Tao, Yin Zheng, Hu Cungang, et al. Modulated model-free predictive current control for voltage source inverters with stagnation elimination and sampling disturbance suppression[J]. IEEE Transa- ctions on Power Electronics, 2023, 38(6): 6996- 7008.
[18] Rui Tao, Feng Zhuangzhuang, Hu Cungang, et al. Double-vector model-free predictive current control method for voltage source inverters with sampling noise suppression[J]. IEEE Transactions on Industrial Electronics, 2024, 71(6): 5797-5806.
[19] Hu Cungang, Xu Wanlun, Yin Zheng, et al. A novel modulated model-free predictive control for LC- filtered grid-forming inverters with double-difference updating[J]. IEEE Transactions on Industrial Elec- tronics, 2024, 71(9): 10806-10817.
[20] Carlet P G, Tinazzi F, Bolognani S, et al. An effective model-free predictive current control for synchronous reluctance motor drives[J]. IEEE Transactions on Industry Applications, 2019, 55(4): 3781-3790.
[21] Wang Fengxiang, Wei Yao, Rodriguez J, et al. State- of-art, development, and challenges of model-free predictive control on motor drives[J]. IEEE Transa- ctions on Power Electronics, 2025, 40(8): 10846- 10864.
[22] 冯壮壮, 曹文平, 芮涛, 等. 基于LUT全更新的无模型预测电流控制方法[J]. 电力电子技术, 2022, 56(3): 76-80.
Feng Zhuangzhuang, Cao Wenping, Rui Tao, et al. A model-free predictive current control method based on LUT full update[J]. Power Electronics, 2022, 56(3): 76-80.
[23] Yu Feng, Zhou Chenhui, Liu Xing, et al. Model-free predictive current control for three-level inverter-fed IPMSM with an improved current difference updating technique[J]. IEEE Transactions on Energy Con- version, 2021, 36(4): 3334-3343.
[24] Ma Chenwei, Li Huayu, Yao Xuliang, et al. An improved model-free predictive current control with advanced current gradient updating mechanism[J]. IEEE Transactions on Industrial Electronics, 2021, 68(12): 11968-11979.
[25] Wang Fengxiang, Wei Yao, Young H, et al. Continuous-control-set model-free predictive funda- mental current control for PMSM system[J]. IEEE Transactions on Power Electronics, 2023, 38(5): 5928-5938.
[26] 方崇智, 萧德云. 过程辨识[M]. 北京: 清华大学出版社, 1988.
[27] Li Wanrong, Yuan Huawei, Li Sinan, et al. A revisit to model-free control[J]. IEEE Transactions on Power Electronics, 2022, 37(12): 14408-14421.
Abstract Model-free predictive sliding mode control (SMC) achieves complete independence from physical models and parameters by constructing a data-driven model. However, its modeling and updating processes demand high-quality sampled data. Stagnation and its adverse effects have emerged as a significant challenge. This paper proposes a notch anti-stagnation-based model-free predictive current SMC method for permanent magnet synchronous motor (PMSM) drives. A notch term is designed to extract specific frequency band harmonics generated by the control strategy. These harmonics are inversely injected into the sampled data to force the generation of data gradients. This paper aims to mitigate the risk of stagnation and provide an effective method for high-performance control of PMSMs in complex environments.
The proposed method consists of the following key steps. Firstly, a notch term is designed by adjusting the notch width and depth. The harmonics produced by the control strategy do not contribute to model updates. This process generates data gradients, reducing the likelihood of stagnation. Secondly, a universal model is established based on the data gradients, and all model coefficients are estimated using the recursive least squares (RLS) algorithm. The prediction process incorporates time-shift considerations, and the model is ultra-localized to implement an intelligent proportional function as the predictive component in the control function. Thirdly, a non-singular fast sliding mode surface is designed. The sliding mode component of the control function integrates both equivalent and switching control laws. Then, the state variables converge onto the sliding mode surface, forming the complete control function of the system. Finally, the system's stability, robustness, and reachability of the sliding mode component, as well as the convergence and stability of the estimation, are discussed under theoretical conditions.
Experimental results on the PMSM platform demonstrate the effectiveness of the proposed method. During steady-states with different load torques and speed references, the proposed method reduces the number of stagnation occurrences from the compared method’s 382 and 339 to 8. In terms of phase current quality, 5th and 7th harmonic contents are reduced, as evidenced by the total harmonic distortion (THD) of single sample points. Under a load torque of 11.5 N·m, continuous Fourier analysis of 1000 sample points shows that the average THD value and THD covering range are reduced from 7.588% and 1.980% to 6.69% and 1.203%, respectively. Similar improvements are observed under a load torque of 4.6 N·m. The proposed method decreases the speed’s integrated time and absolute error (ITAE) from 0.02276 to 0.02129. Finally, guidelines for selecting the main parameters of the proposed method are provided.
The following conclusions can be drawn. (1) Compared with the model-free SMC method without anti-stagnation, the proposed method significantly reduces the possibility of stagnation by generating data gradients, effectively addressing stagnation and its adverse effects. (2) The adaptability of the universal model in the predictive component is improved, and the current quality and prediction accuracy are both enhanced by combining with the non-singular fast sliding mode surface in the sliding mode component. (3) The proposed method is independent of physical models and parameters, exhibiting enhanced robustness.
Keywords:Model-free predictive current sliding mode control, notch anti-stagnation section, data-driven model, permanent magnet synchronous motor
中图分类号:TM341
DOI: 10.19595/j.cnki.1000-6753.tces.250135
魏 尧 男,1993年生,助理研究员,研究方向为新能源汽车电控系统、交流电机伺服系统及其先进控制。
E-mail: yao.wei@fjirsm.ac.cn
汪凤翔 男,1982年生,教授,研究员,博士生导师,研究方向为电力电子与电力传动。
E-mail: fengxiang.wang@fjirsm.ac.cn(通信作者)
(编辑 崔文静)