依托信号注入的PMSM转子位置测量与估计方法的特征分析
付兴贺1 王新元1 刘承军2
(1. 东南大学电气工程学院 南京 210096 2. 哈尔滨工业大学电气工程及自动化学院 哈尔滨 150001)
摘要 该文以需要信号注入的永磁同步电机(PMSM)转子位置测量和估计方法为对象,根据系统辨识理论,从物理载体、解算手段和辨识结果3个层面分析了测量和估计两类方法获取转子位置的本质特征、内在联系与区别,进而指出了获取转子位置过程的关键步骤:响应测量和位置解算。指明了在转子位置估计过程中PMSM同时发挥作动与测量作用,建立了闭环负反馈下位置解算方法的统一框架便于深入理解信息处理机制,分析了转子位置辨识结果的影响因素和有待发展的关键技术,最后阐明了PMSM转子位置估计方法中隐含着感应同步器和旋转变压器的位置测量技术。
关键词:永磁同步电机 转子位置 解调算法 感应同步器 旋转变压器
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)具有轻质高效、转矩密度大、维护成本低等优点,依托PMSM构建的调速或伺服控制系统在军工、国防、航空、航天、工业、交通等诸多领域发挥着重要作用[1-2]。PMSM转子位置的实时获取是形成负反馈控制的基本要求,更是驱动系统高性能运行的品质保障。获取PMSM转子位置的直接手段是使用传感器在线测量,随着集成电路技术、信息处理技术的发展,PMSM转子位置估计方法逐渐成熟和完善,成为转子位置获取的第二种有效手段,进而诞生了PMSM无位置传感器控制技术。
用于PMSM转子位置获取的直接测量方法包括依托光电转换原理的光电编码器和依托电磁感应原理的磁编码器、感应同步器和旋转变压器,考虑到与转子位置间接估计方法的联系,本文主要讨论感应同步器和旋转变压器。感应同步器和旋转变压器作为位置检测元件诞生于20世纪五六十年代,其技术本质是一种基于电磁感应原理的“发电机”,由于元件的输入和输出绕组间的互感随转子位置呈周期性变化,当在输入绕组中施加高频电压激励信号时,输出绕组中将感应出隐含转子位置信息的电压响应信号,通过对电压响应信号进行解码获取转子位置[3],因此可将此类方法看作基于高频信号注入的转子位置测量方法。
基于高频信号注入的转子位置估计方法诞生于20世纪末,早期的研究包括利用在线电抗测量的间接磁通检测(Indirect Flux detection by On-line Reactance Measurement, INFORM)[4]方法、旋转高频电压注入法[5]和脉振高频电压注入法[6],后来各国学者又提出了多种估计方法,如零序电流导数测量法(Zero Sequence Current Derivatives measurements method, ZSCD)[7]、零电压矢量注入法(Zero Voltage Vector Injection method, ZVVI)[8]、PWM载波频率法[9]、零序电压法[10]、脉振方波电压注入法[11]以及三角波注入法[12]等。此外,区别于PWM激励信号注入中的INFORM、ZSCD、ZVVI和载波频率法,有学者提出了基于有限集模型预测控制的离散开关信号注入方法[13-14]等。随着人工智能技术的发展,新颖的智能算法在响应信号提取、转子位置解算等方面体现出一定的优势[7, 15-17]。
德国慕尼黑工业大学的R. Kennel等对高频信号注入法在工业伺服系统中的应用做出了分析和预测[18]。英国纽卡斯尔大学的P. P. Acarnley等将PMSM无位置传感器技术分为三类[19],分别为利用电机反电动势、电感、磁链进行转子位置估计;韩国首尔大学的S. K. Sul教授等总结了内置式永磁同步电机(Interior PMSM, IPMSM)无位置传感器技术的发展[20],重点分析了低速下高频信号注入方法的关键技术和发展趋势,如提高位置估计精度和动态性能、降低逆变器非线性影响、转子绝对位置估计等;哈尔滨工业大学王高林等对PMSM转子位置估计方法进行了深入分析[21],给出了零低速下基于电机凸极特性和高速下基于电机模型估计方法的差异;海军工程大学刘计龙等从PMSM转子初始位置估计、零低速控制、中高速控制和全速域控制4个方面阐述了无位置传感器控制要求和技术难点[22];合肥工业大学张兴等按照高频信号的类型对转子位置估计方法进行分类[23],总结对比各类方法的优缺点;西北工业大学马瑞卿等从有、无位置传感器两个方面对PMSM转子初始位置辨识进行了分析和比较[24]。
既然测量方法和估计方法均采用高频信号注入,两类方法的本质是否相同,方法间的共性特征、差异化表现以及应用特点如何?现有文献更多关注单一转子位置获取方法的执行过程、解算要求、结果精度等,相关综述性文献主要关注测量或估计类方法的内部比较,鲜有“跨界”分析。尽管R. D. Lorenz教授和R. Kennel教授曾指出两类方法具有相似特征,但具体的结构差异性、算法相关性、参数敏感性等问题还有待深入研究与解答。针对以上问题,本文从系统辨识角度出发,对基于高频信号注入的转子位置测量和估计方法进行归纳和整理,从物理载体、信号解算和误差分析几个方面开展深入的对比分析,讨论上述方法的影响因素和性能特点,并对PMSM转子位置测量和估计的关键技术做出展望。
1 转子位置获取方法内涵与分类
1.1 从系统辨识视角解读位置测量或估计方法
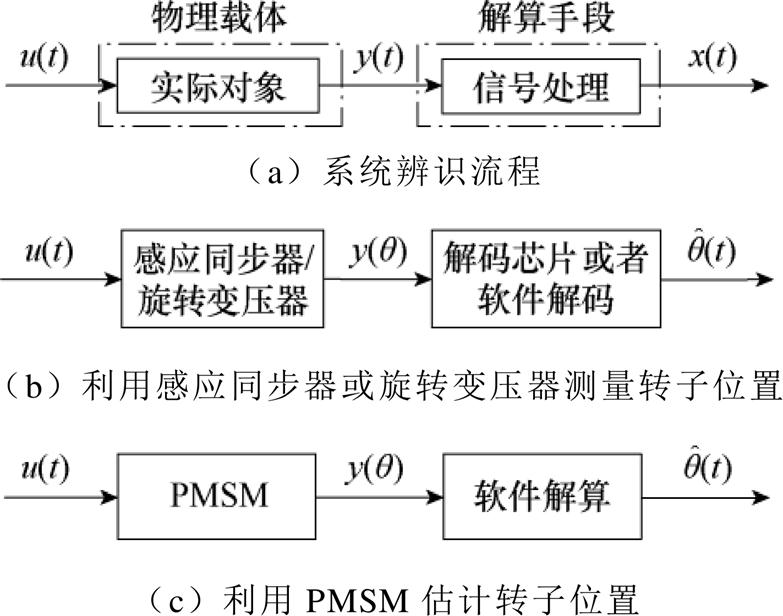
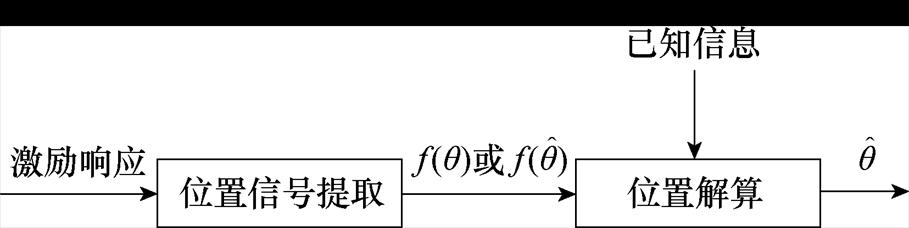
根据系统辨识理论,针对具有单一映射关系的单输入单输出系统,忽略干扰影响,将输入信号 作用于实际对象,测量实际对象的输出信号
作用于实际对象,测量实际对象的输出信号 ,再对进行信号处理,得到所需状态信息
,再对进行信号处理,得到所需状态信息 ,基本流程可以由图1a描述。上述过程可以概括为对物理载体施加激励并产生输出响应、利用解算手段对输出响应进行处理得到状态信息两个步骤。对于PMSM转子位置获取而言,当采用传感器测量时,物理载体对应为感应同步器或旋转变压器,输出响应信号
,基本流程可以由图1a描述。上述过程可以概括为对物理载体施加激励并产生输出响应、利用解算手段对输出响应进行处理得到状态信息两个步骤。对于PMSM转子位置获取而言,当采用传感器测量时,物理载体对应为感应同步器或旋转变压器,输出响应信号 中包含实际转子位置
中包含实际转子位置 ,再利用解码芯片或者软件完成解码;当对PMSM注入高频信号进行位置估计时,物理载体对应为PMSM,解算手段为软件解算,上述过程分别如图1b和图1c所示,
,再利用解码芯片或者软件完成解码;当对PMSM注入高频信号进行位置估计时,物理载体对应为PMSM,解算手段为软件解算,上述过程分别如图1b和图1c所示, (简写为
(简写为 )是最终辨识出的PMSM转子位置。
)是最终辨识出的PMSM转子位置。
辨识过程中的输入信号可以是确定性(可解析描述)的,如典型的阶跃信号、脉冲信号等,也可以是白噪声信号或者随机信号及伪随机信号(确定性的,但性质接近随机信号),因此若文献采用某种“新”的输入信号,且关心信号的能谱密度,这在系统辨识范围内是常规做法。
1.2 转子位置获取方法分类及差异性分析
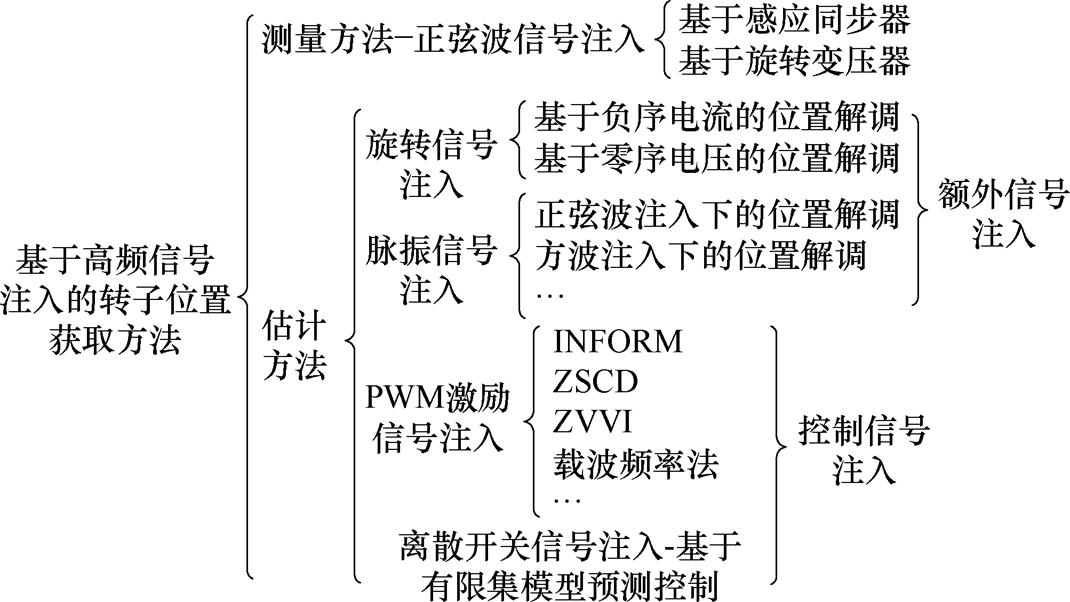
在高频信号注入的前提下,根据实际对象的不同,PMSM转子位置获取方法可以分为两类:依托感应同步器或旋转变压器的直接测量法和依托电机的间接估计法,其中依托电机的间接估计法还可以根据注入信号和解算方法的不同,细分为多种方法,如图2所示。
基于高频信号注入的转子位置获取方法所依托的物理载体从最初的“传感器+电机”组合简化为单电机的过程,呈现了电机“功能复用”的特点,即电机同时作为驱动电机又发挥检测元件的作用。方案替代的原因在于:感应同步器和旋转变压器本身就是经过特殊设计的交流电机,若主驱动电机工作在电动模式的同时发挥旋转变压器的作用,它将能够实现自传感的功能。因此,R. D. Lorenz教授在论文中使用了“self-sensing”用以说明电机自身作为传感器的作用。另外,德国R. Kennel教授多次使用“encoderless”而不是“sensorless”,从另外一个角度说明转子位置估计方法省去的是编码器,而不是广义的传感器(因为仍然需要利用电流传感器获得电流响应)。
虽然PMSM转子位置测量和估计方法的共性特征是利用了高频信号作为激励,但因为物理载体不同,且输入信号、输出信号、解算方法等方面均存在多种选择,导致两类方法以及衍生出来的细化方法在转子位置获取的条件、过程、结果等方面体现出差异,笔者给出的对比分析结果如图3所示。
与测量方法相比,基于高频信号注入的转子位置估计方法具有如下特点:①无需物理位置传感器,利用电机的内部状态,降低了系统的复杂性和成本,增强了结构紧凑性;②借鉴转子位置测量方法的信号解调算法,通过软件编程实现,降低了硬件成本;③从依赖物理元件逐渐过渡到依赖信号处理技术、观测技术及解算方法,转子位置获取的影响因素增多;④位置跟踪精度从角秒量级退化到角度量级,适用范围有限;⑤对电机的起动、加速、过载要求增加,导致部分应用领域受限;⑥无需精密的位置检测元件,可拓展环境适用范围,满足极端工况要求;⑦估计算法可能带来一定的副作用,如初始位置辨识导致的转子位移、在线位置辨识导致的转矩脉动和噪声水平升高等;⑧与位置测量方法相比,位置估计方法不受传感器安装精度的影响,不存在安装偏置误差。
2 物理载体的特征分析
2.1 测量方法依托的物理载体
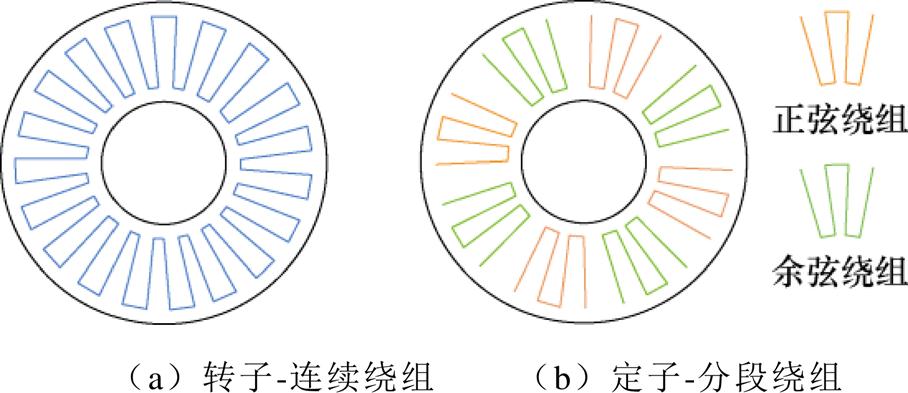
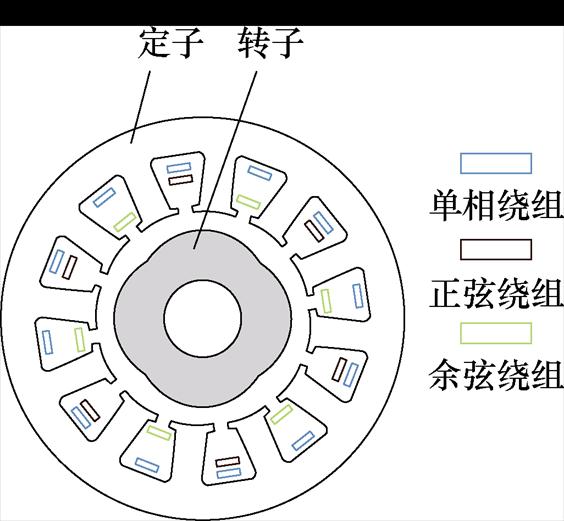
用于检测PMSM转子位置的感应同步器由定子和转子组成,典型结构[3]如图4所示,转子上印制连续的单相绕组、定子上印制交替排列的空间上相差1/4极距(90°电角度)的两相分段绕组,同一相的分段绕组相互串联,最后形成正弦绕组和余弦绕组。
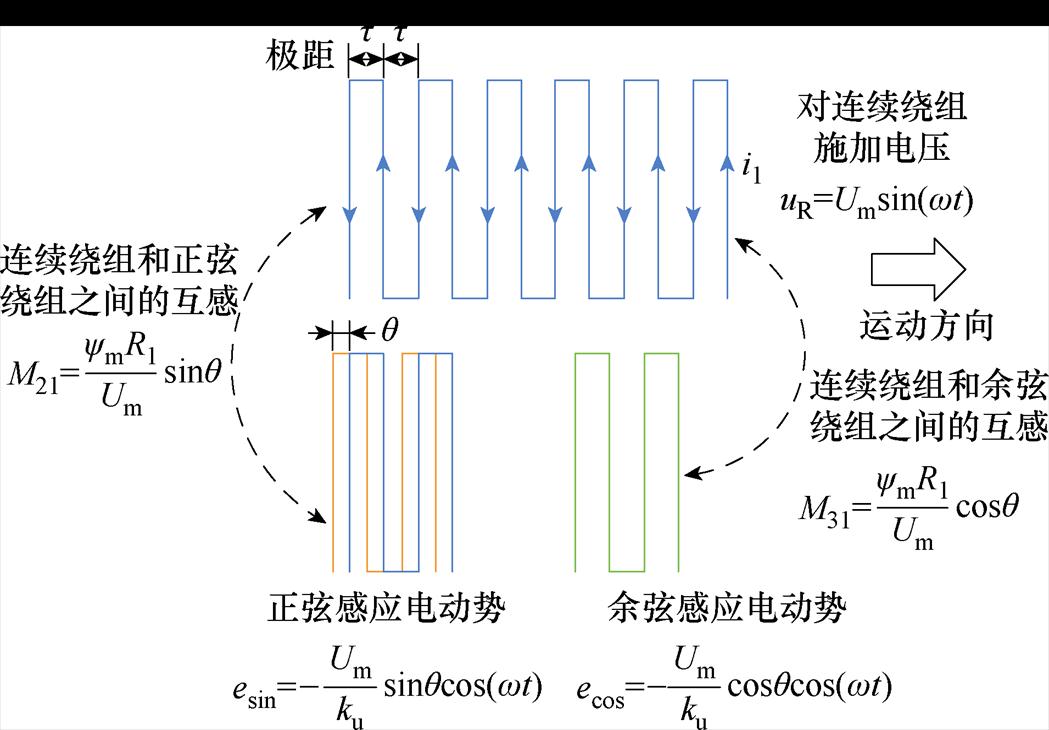
为便于分析,将感应同步器的连续绕组和分段绕组按直线展开排列,其工作原理如图5所示。图5中, 和
和 分别为施加激励电压
分别为施加激励电压 的幅值和角频率,
的幅值和角频率, 、
、 、
、 分别为连续绕组的电流、电阻、耦合磁链的最大值,
分别为连续绕组的电流、电阻、耦合磁链的最大值, 为绕组电压传递系数。感应同步器的连续绕组与正/余弦绕组之间的互感由转子位置决定,随着转子的运动,正/余弦绕组中产生的感应电动势的幅值发生相应的变化。
为绕组电压传递系数。感应同步器的连续绕组与正/余弦绕组之间的互感由转子位置决定,随着转子的运动,正/余弦绕组中产生的感应电动势的幅值发生相应的变化。
旋转变压器具有多种结构形式[25],本文仅以图6所示的4极、12槽磁阻式旋转变压器为例展开讨论。转子是具有凸极特性的磁阻式结构,定转子之间气隙不均匀,故绕组之间的互感与转子位置有关。
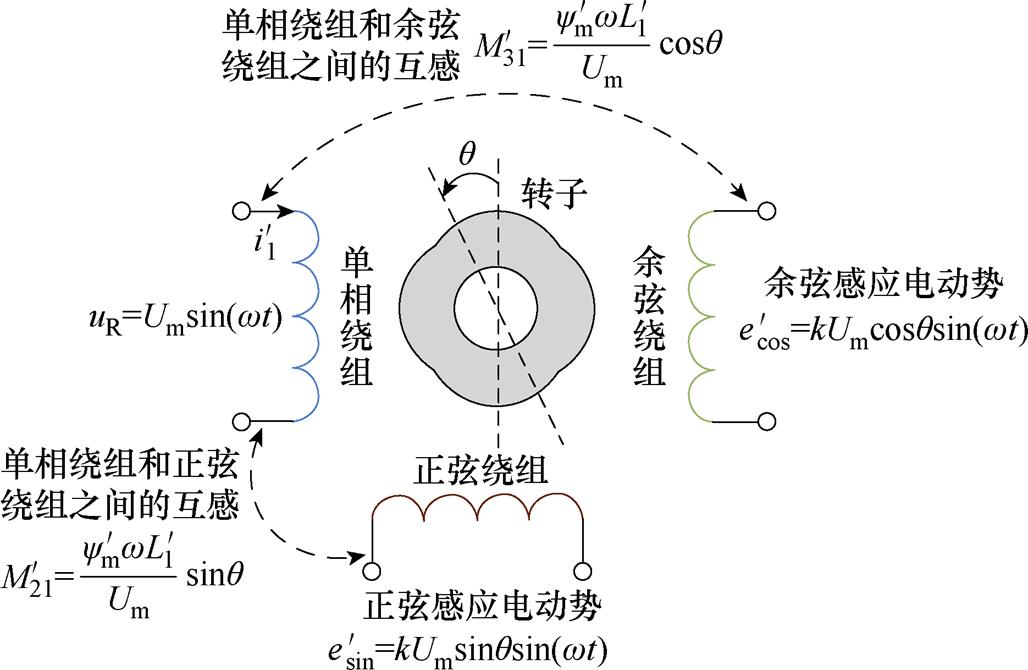
激励信号与感应电动势之间的相互关系如图7所示,向单相绕组注入的高频电压信号与感应同步器注入信号一致, 、
、 、
、 分别为单相绕组的电流、自感、耦合磁链的最大值,k为电压比,其值等于正/余弦绕组的匝数与单相绕组的匝数之比。
分别为单相绕组的电流、自感、耦合磁链的最大值,k为电压比,其值等于正/余弦绕组的匝数与单相绕组的匝数之比。
旋转变压器和感应同步器均依赖电磁感应原理,在单相或者双相绕组中注入激励信号(一般为正弦或余弦信号),检测其余绕组中的感应电动势信号,对检测到的电动势信号做解调处理可以获取转子位置信息,但因结构及加工工艺的差异,两种位置检测元件相关特性以及位置检测结果存在一定区别,归纳整理结果见表1。
表1 感应同步器与旋转变压器的综合比较
Tab.1 Comprehensive comparison between inductosyn and resolver
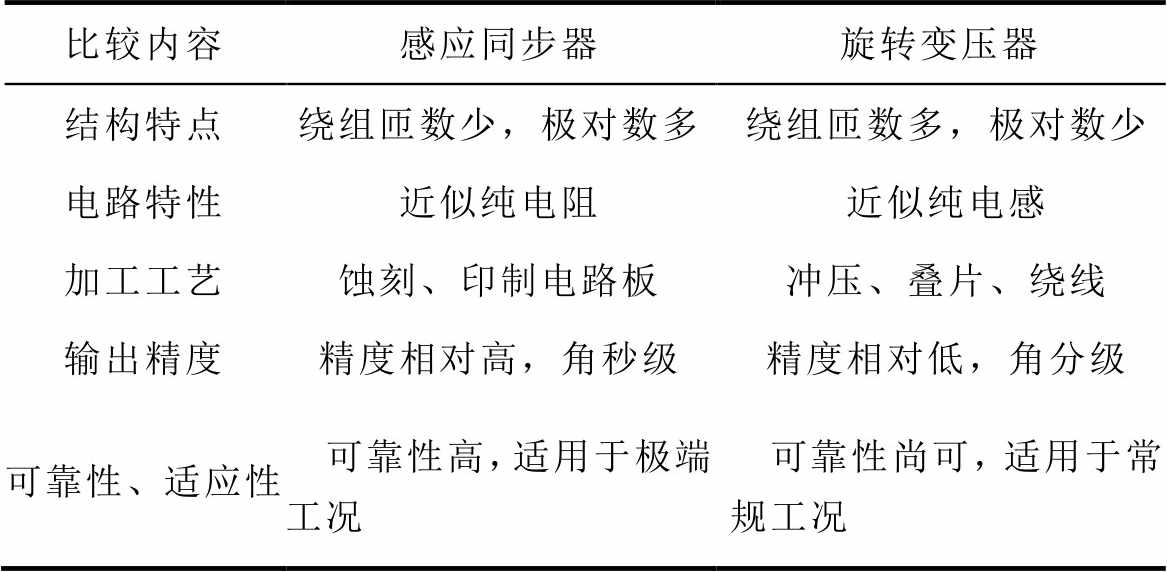
比较内容感应同步器旋转变压器 结构特点绕组匝数少,极对数多绕组匝数多,极对数少 电路特性近似纯电阻近似纯电感 加工工艺蚀刻、印制电路板冲压、叠片、绕线 输出精度精度相对高,角秒级精度相对低,角分级 可靠性、适应性可靠性高,适用于极端工况可靠性尚可,适用于常规工况
2.2 估计方法依托的物理载体
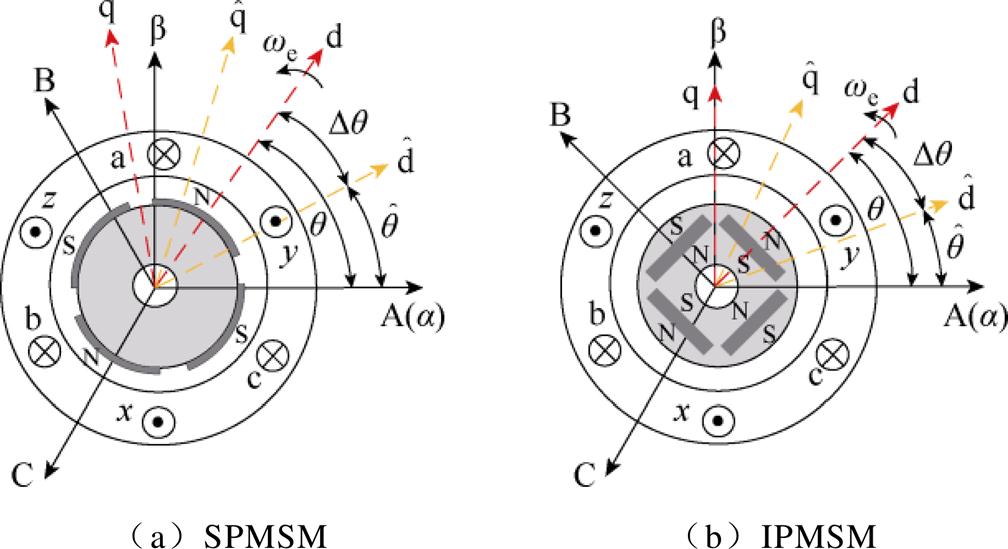
转子位置估计方法以电机为物理载体,向电机绕组中注入高频电压信号,以图8所示的表面安装永磁同步电机(Surface PMSM, SPMSM)和IPMSM结构为例,分析电机作为位置传感器时所表现出的特征。图8中的电机转子为2对极;A、B、C为三相定子绕组 、
、 、
、 的轴线,同时ABC构成三相静止轴系;
的轴线,同时ABC构成三相静止轴系; 为两相静止轴系,dq为同步旋转轴系,
为两相静止轴系,dq为同步旋转轴系, 为用于转子位置估计的虚拟同步旋转轴系;
为用于转子位置估计的虚拟同步旋转轴系; 为转子位置误差,
为转子位置误差, ,
, 为转子旋转的电角速度。
为转子旋转的电角速度。
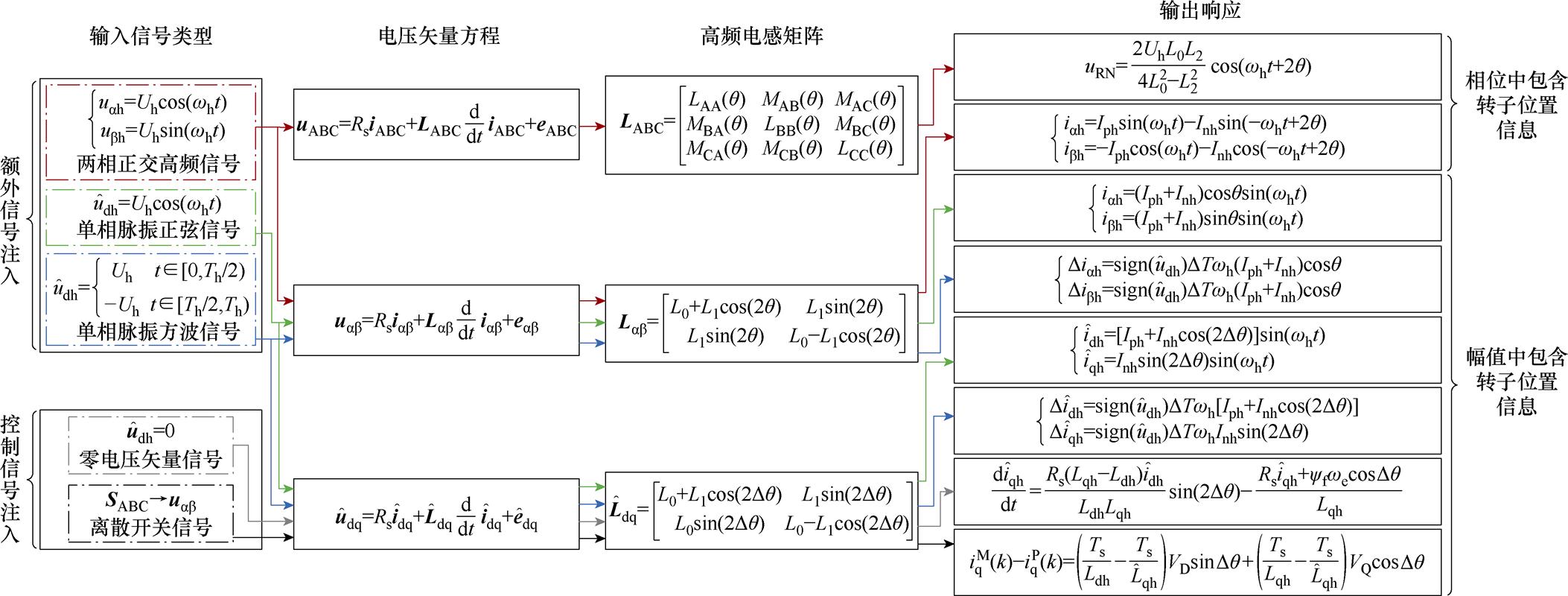
与感应同步器或旋转变压器相比,以电机为载体的转子位置估计方法可选择的注入信号具有多样化特征,配合不同轴系,演变出多种注入形式以及多样化的输出响应,图9给出了几种典型的组合。图9中, 、
、 和
和 分别为在轴系和轴系注入的高频电压,
分别为在轴系和轴系注入的高频电压, 为在PWM周期之间插入的零电压矢量[8],
为在PWM周期之间插入的零电压矢量[8], 为有限集模型预测控制下的离散开关信号[14];
为有限集模型预测控制下的离散开关信号[14]; 、
、 、
、 分别为注入高频电压的幅值、角频率和周期,
分别为注入高频电压的幅值、角频率和周期, ;不同坐标轴系下的u、i、e分别为电压、电流、反电动势矢量,L为绕组电感矩阵,
;不同坐标轴系下的u、i、e分别为电压、电流、反电动势矢量,L为绕组电感矩阵, 为定子电阻,
为定子电阻, 为永磁体磁链;
为永磁体磁链; 、
、 、
、 为三相绕组的自感,
为三相绕组的自感, 、
、 、
、 为绕组间的互感;
为绕组间的互感; 、
、 分别为均值电感和差值电感,
分别为均值电感和差值电感,
 ,
, ,
, 为相绕组自感的二次谐波幅值,
为相绕组自感的二次谐波幅值, ,其中
,其中 、
、 分别为d、q轴的高频电感,
分别为d、q轴的高频电感, 为的估计值;
为的估计值; 为零序电压,
为零序电压, 、
、 (
( 、
、 ),
), 、
、 (
( 、
、 )分别为轴系和轴系的高频电流响应(高频电流增量响应),
)分别为轴系和轴系的高频电流响应(高频电流增量响应), 、
、 分别为第k时刻的采样q轴电流和预测q轴电流;
分别为第k时刻的采样q轴电流和预测q轴电流; 、
、 分别为注入信号引起的电流响应的正序分量幅值和负序分量幅值,
分别为注入信号引起的电流响应的正序分量幅值和负序分量幅值, 为采样周期,
为采样周期, 为开关周期,VD、VQ为使电流产生变化的电压控制量。图9中PMSM的输出响应是基于以下简化分析得到的:假设绕组电流为三相对称的正弦波电流,忽略电机铁心饱和、涡流损耗和磁滞损耗等因素影响。对于额外信号注入法,需忽略绕组电阻和反电动势。
为开关周期,VD、VQ为使电流产生变化的电压控制量。图9中PMSM的输出响应是基于以下简化分析得到的:假设绕组电流为三相对称的正弦波电流,忽略电机铁心饱和、涡流损耗和磁滞损耗等因素影响。对于额外信号注入法,需忽略绕组电阻和反电动势。
图9中仅列出了常见的额外信号注入和两种控制信号注入下的输出响应。此外,脉振三角波[26]、随机信号注入下的电流响应[27]或者零序电压响应[28-29]也能反映转子位置,或者在任意坐标轴系注入高频信号,输出响应中也能包含转子位置信息[30]。对PWM周期的电压矢量进行修改[4, 7],可以产生多种形式的控制激励信号,亦或者采用SPWM方式[9],使载波频率电流响应中包含转子位置信息。不论注入的高频信号形式以及注入位置如何改变,均需基于PMSM的电压矢量方程计算特定输出响应,再利用解调算法估计转子位置。
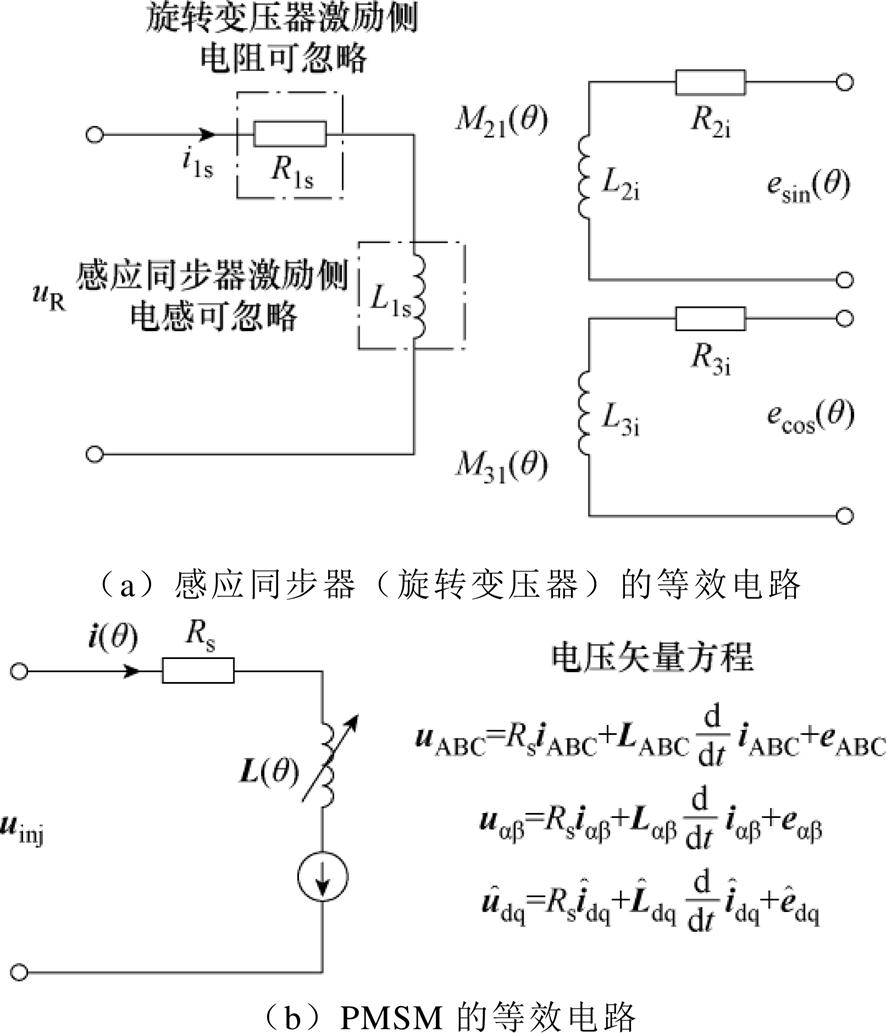
2.3 两种方法依托的物理载体的等效与差异
感应同步器和旋转变压器存在多种励磁方式,但不同励磁方式下的等效电路不变;PMSM的等效电路独立于注入信号和注入位置。单相绕组励磁的感应同步器(旋转变压器)以及PMSM的等效电路如图10所示。
图10a中, 为在激励侧绕组施加高频电压产生的电流,
为在激励侧绕组施加高频电压产生的电流, 、
、 ,
, 、
、 ,
, 、
、 分别为感应同步器(旋转变压器)的激励绕组、正弦、余弦绕组的电阻和自感,
分别为感应同步器(旋转变压器)的激励绕组、正弦、余弦绕组的电阻和自感, 、
、 分别为激励绕组和正弦绕组、余弦绕组之间的互感,
分别为激励绕组和正弦绕组、余弦绕组之间的互感, 、
、 分别为输出的正弦、余弦感应电动势;图10b中,
分别为输出的正弦、余弦感应电动势;图10b中, 为电机绕组的高频电压矢量,
为电机绕组的高频电压矢量, 为电机定子绕组的电流响应矢量,
为电机定子绕组的电流响应矢量, 为绕组电感矩阵,该等效电路模型适用于不同的电压矢量方程。
为绕组电感矩阵,该等效电路模型适用于不同的电压矢量方程。
对转子位置测量和估计方法的物理载体进行详细的比较分析,见表2。由于电机结构相对复杂,且兼顾作为驱动电机运行,相关的数学模型建立在多种可能的坐标轴系上,故激励信号施加过程、输出响应的测量过程、信号转换过程相对复杂。转子位置估计还要求注入的激励信号频率与电机工作频率错开,便于后续的信号提取与滤波,激励信号的幅值不能过大,避免引起副作用。因此,依托电机本体结构的转子位置估计方法虽然无需额外安装的位置检测元件,可显著缩小空间并降低成本,但相当于将问题转移到系统控制层面,对微处理器、电流检测元件甚至工况提出了更高的要求。
3 位置解算方法的特征分析
3.1 位置解算方法的分类
测量和估计方法对应的物理载体的输出响应包含了转子位置信息,且该信息多体现在正、余弦函数中,因此位置解算的任务主要是对正、余弦函数进行求解得到角位置信息。解算方法包括开环求解和闭环求解两种。
表2 测量和估计方法物理载体的比较分析
Tab.2 Comparative analysis of physical carriers of measurement and estimation methods
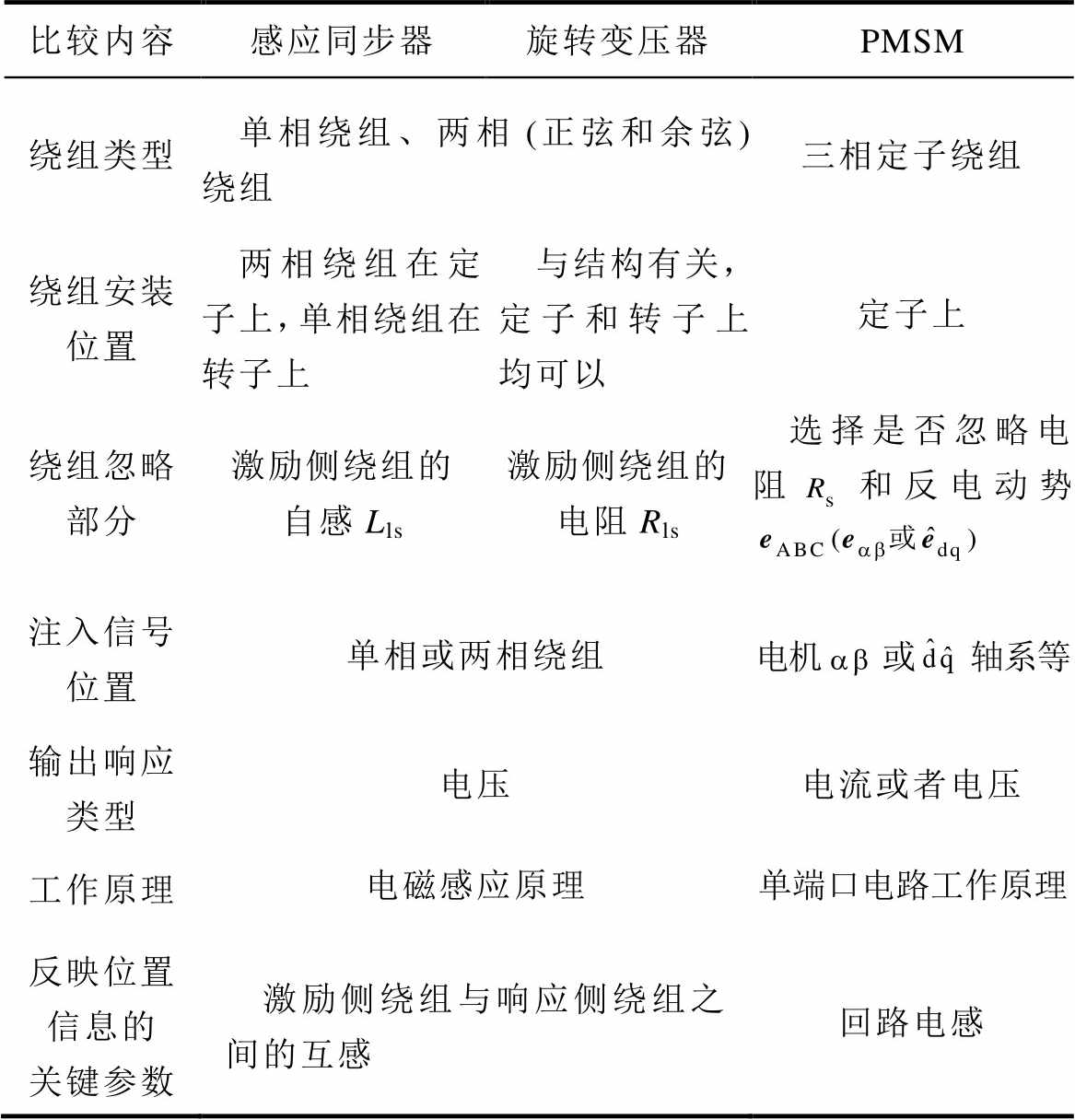
比较内容感应同步器旋转变压器PMSM 绕组类型单相绕组、两相 (正弦和余弦)绕组三相定子绕组 绕组安装位置两相绕组在定子上,单相绕组在转子上与结构有关,定子和转子上均可以定子上 绕组忽略部分激励侧绕组的自感Lls激励侧绕组的电阻Rls选择是否忽略电阻和反电动势 注入信号位置单相或两相绕组电机或轴系等 输出响应类型电压电流或者电压 工作原理电磁感应原理单端口电路工作原理 反映位置信息的关键参数激励侧绕组与响应侧绕组之间的互感回路电感
转子位置开环求解原理框图如图11所示,首先利用位置信号提取技术从激励响应中提取包含转子位置信息的信号 或
或 ,再根据其特征结合已知信息进行位置解算,最终得到转子位置的估计值。开环求解一般采用反正切计算[4, 7, 9, 31]、近似线性化计算[32]、查表法[16-17, 33]、幅值比较法[34]和寻优估计法[35-36]等。开环求解方法无需构建包含位置估计误差的信号,不存在反馈环节、算法简单是其优势,但也因此具有局限性。
,再根据其特征结合已知信息进行位置解算,最终得到转子位置的估计值。开环求解一般采用反正切计算[4, 7, 9, 31]、近似线性化计算[32]、查表法[16-17, 33]、幅值比较法[34]和寻优估计法[35-36]等。开环求解方法无需构建包含位置估计误差的信号,不存在反馈环节、算法简单是其优势,但也因此具有局限性。
以锁相环(Phase Locked Loop, PLL)为代表的闭环算法是目前最常用的位置解算方法,且能兼顾的速度范围宽、抗干扰能力强、系统稳定性好。锁相环是一个能够消除输出信号 与输入信号
与输入信号 相位差的反馈系统,利用外部输入的参考信号控制环路内振荡信号的频率和相位,使振荡信号同步至参考信号。一般的PLL结构如图12所示,主要包含鉴相器(Phase Detector, PD)、环路滤波器(Loop Filter, LF)和压控振荡器(Voltage Controlled Oscillator, VCO)三部分,不同形式的PLL差别体现在PD、LF和VCO的具体实现方式上。
相位差的反馈系统,利用外部输入的参考信号控制环路内振荡信号的频率和相位,使振荡信号同步至参考信号。一般的PLL结构如图12所示,主要包含鉴相器(Phase Detector, PD)、环路滤波器(Loop Filter, LF)和压控振荡器(Voltage Controlled Oscillator, VCO)三部分,不同形式的PLL差别体现在PD、LF和VCO的具体实现方式上。
3.2 直接测量采用的位置解算方法
感应同步器和旋转变压器自20世纪五六十年代发展至今,具有多种注入信号的组合方式及信息处理模式,解算方法比较成熟,以感应同步器为例具体分析,见表3。表3中, 、
、 、
、 分别为转子绕组、正弦绕组、余弦绕组的输入电压,
分别为转子绕组、正弦绕组、余弦绕组的输入电压, 为两相绕组励磁下单相绕组的感应电动势,
为两相绕组励磁下单相绕组的感应电动势, 为用于位置解算的合成电压,
为用于位置解算的合成电压, 为定转子绕组间的最大电压耦合系数;
为定转子绕组间的最大电压耦合系数; 、
、 分别为在鉴幅情况下仅由正弦绕组、余弦绕组励磁时转子绕组上的感应电动势;
分别为在鉴幅情况下仅由正弦绕组、余弦绕组励磁时转子绕组上的感应电动势; 、
、 分别为在鉴相情况下仅由正弦绕组、余弦绕组励磁时转子绕组上的感应电动势。
分别为在鉴相情况下仅由正弦绕组、余弦绕组励磁时转子绕组上的感应电动势。
表3 感应同步器信号注入与位置解算方法
Tab.3 Signal injection and position calculation method of inductosyn
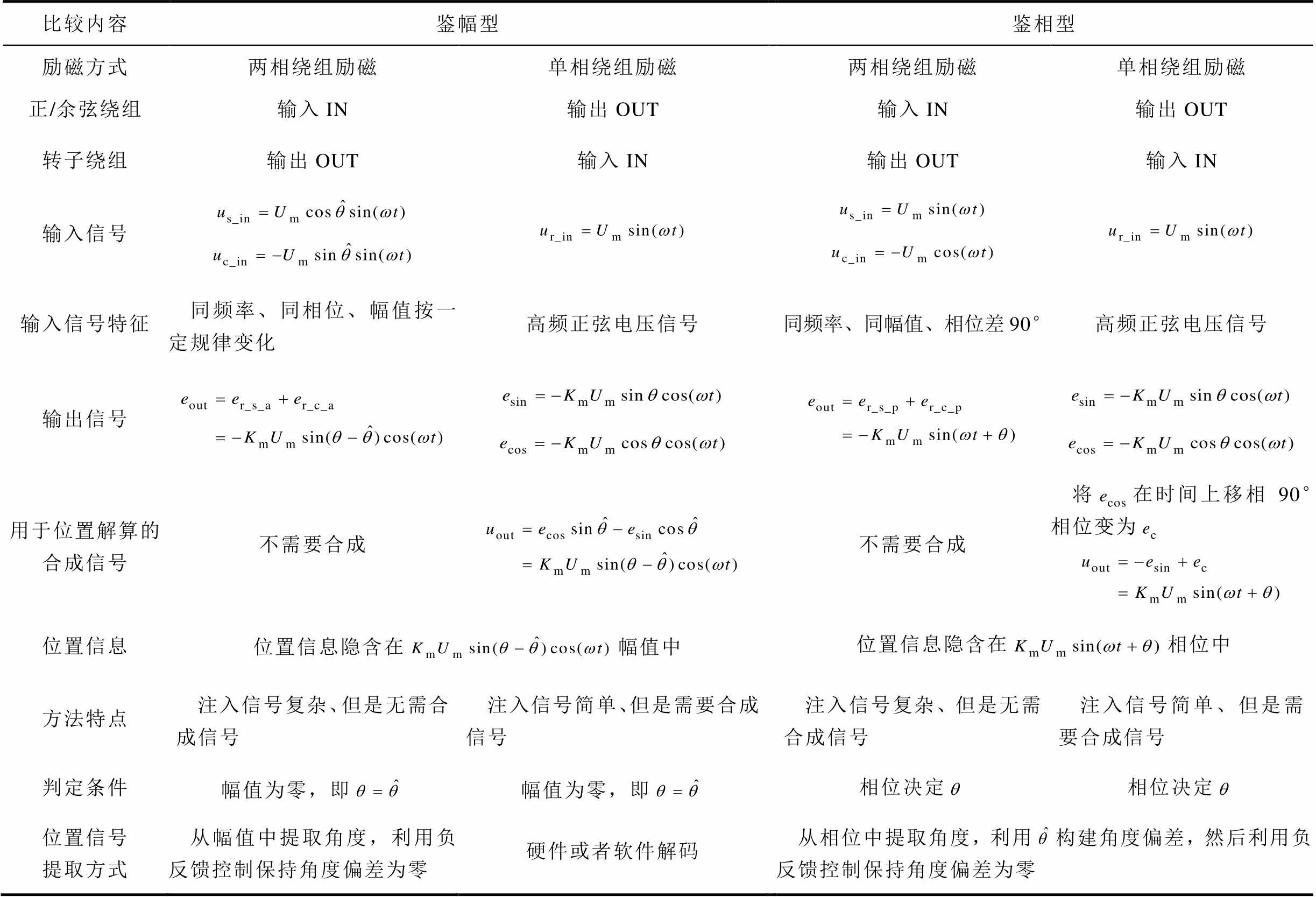
比较内容鉴幅型鉴相型 励磁方式两相绕组励磁单相绕组励磁两相绕组励磁单相绕组励磁 正/余弦绕组输入IN输出OUT输入IN输出OUT 转子绕组输出OUT输入IN输出OUT输入IN 输入信号 输入信号特征同频率、同相位、幅值按一定规律变化高频正弦电压信号同频率、同幅值、相位差90°高频正弦电压信号 输出信号 用于位置解算的合成信号不需要合成不需要合成将在时间上移相90°相位变为 位置信息位置信息隐含在幅值中位置信息隐含在相位中 方法特点注入信号复杂、但是无需合成信号注入信号简单、但是需要合成信号注入信号复杂、但是无需合成信号注入信号简单、但是需要合成信号 判定条件幅值为零,即幅值为零,即相位决定相位决定 位置信号提取方式从幅值中提取角度,利用负反馈控制保持角度偏差为零硬件或者软件解码从相位中提取角度,利用构建角度偏差,然后利用负反馈控制保持角度偏差为零
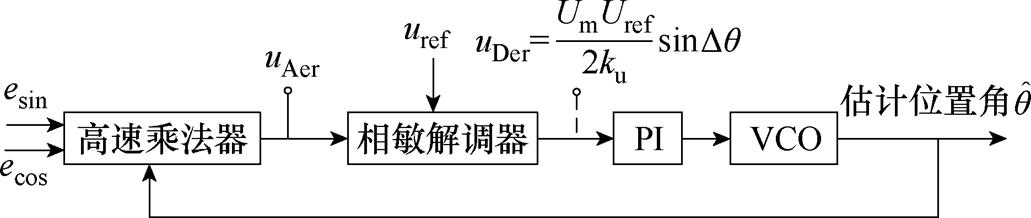
针对最常用的单相绕组励磁鉴幅方法,存在硬件解码和软件解码两种方式。软件解码是仅使用主控芯片的外设,通过软件方式对位置进行解码,主要包括4个步骤:①产生高频激励信号;②对绕组感应出的正、余弦信号进行差分调理;③通过模数转化器采集输出的正、余弦信号包络线;④使用锁相环等对采样后的正、余弦信号进行位置解算[37]。硬件解码将上述4个步骤集成到专用芯片中,典型的位置解算芯片如AD2S80A、AD2S1200和AD2S90等,解算原理基本相同,以AD2S80A为例,其位置解算原理[38]如图13所示。
以图5中感应同步器分段绕组输出作为高速乘法器的输入,两相信号在高速乘法器中分别与 、
、 相乘后再相减,差作为交流误差信号
相乘后再相减,差作为交流误差信号 ,即
,即
式(1)表明,误差信号的幅值中包含转子位置信息,需要完成幅值解调。相敏解调器的参考电压 ,其中,
,其中, 为参考信号的幅值。将与
为参考信号的幅值。将与 相乘并通过低通滤波器(Low Pass Filter, LPF)得到直流误差信号
相乘并通过低通滤波器(Low Pass Filter, LPF)得到直流误差信号 为
为
 (2)
(2)
在PI调节器和VCO的作用下,调整趋近于0。此时,可以将VCO的输出视为实际转子位置的辨识值 。
。
3.3 间接估计采用的位置解算方法
转子位置间接估算方法在诸多文献中均已给出,读者可以查阅,本文重点分析典型转子位置解算方法的共性特征和差异,并归纳出一般性规律。
3.3.1 旋转高频电压注入法的位置解算
在电机 轴系注入两相正交高频电压信号,可根据电流响应或电压响应估计转子位置。
轴系注入两相正交高频电压信号,可根据电流响应或电压响应估计转子位置。
1)基于电流响应的位置解算
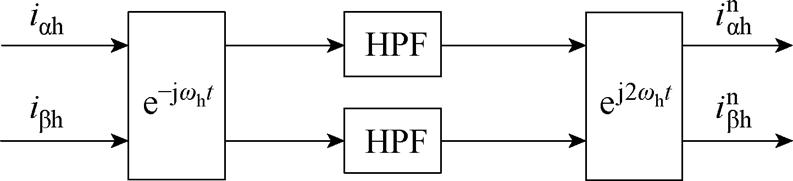
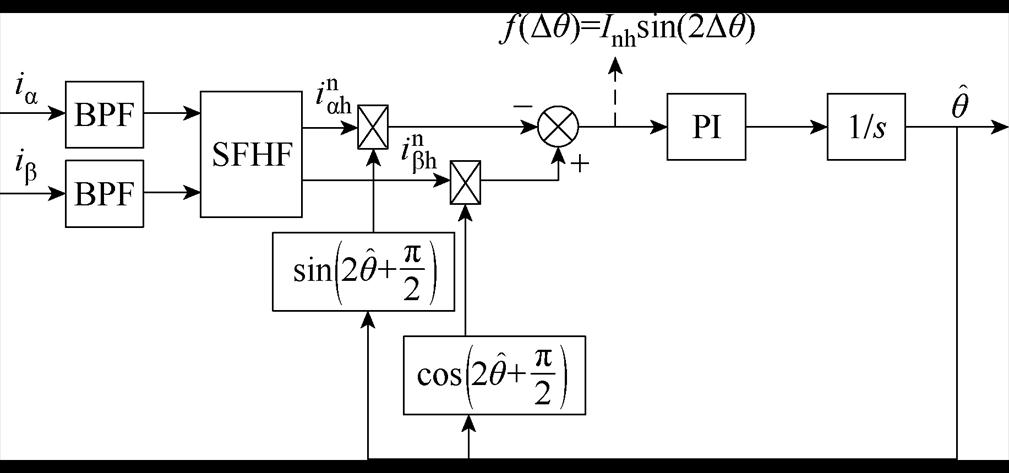
该方法可以只利用负序电流或者同时利用正序电流和负序电流解算转子位置[39],目前最常用的方法是基于负序电流的解调算法。负序电流的提取通常采用同轴高通滤波器(Synchronous Frame High- pass Filter, SFHF)算法,过程如图14所示,其中高通滤波器(High Pass Filter, HPF)的作用是滤除正序分量, 、
、 分别为
分别为 、
、 轴的负序电流。
轴的负序电流。
基于负序电流的位置解算原理框图如图15所示。在获得负序电流之后,利用图15的算法完成转子位置估算,其中带通滤波器(Band Pass Filter, BPF)的作用是从轴系的电流响应 和
和 中提取
中提取 和
和 ,
, 为位置偏差信号,通过PI调节器和积分器
为位置偏差信号,通过PI调节器和积分器 ,可以估计出转子位置。
,可以估计出转子位置。
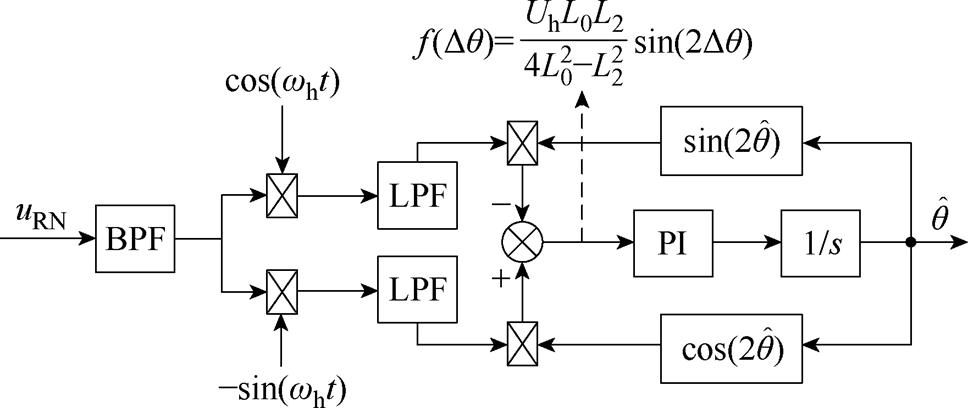
2)基于电压响应的位置解算
与基于负序电流的位置解算不同,基于电压响应的位置解算需要利用参考信号提取转子位置偏差信号,其位置解算原理框图如图16所示。
3.3.2 脉振高频电压注入法的位置解算
可以在轴系或 轴系中选择一个轴系注入单相高频电压信号形成脉振磁场,然后再选择某个轴系的电流响应估计转子位置。本文以单相高频电压信号注入轴系、分别在轴系和轴系解算为例进行说明。
轴系中选择一个轴系注入单相高频电压信号形成脉振磁场,然后再选择某个轴系的电流响应估计转子位置。本文以单相高频电压信号注入轴系、分别在轴系和轴系解算为例进行说明。
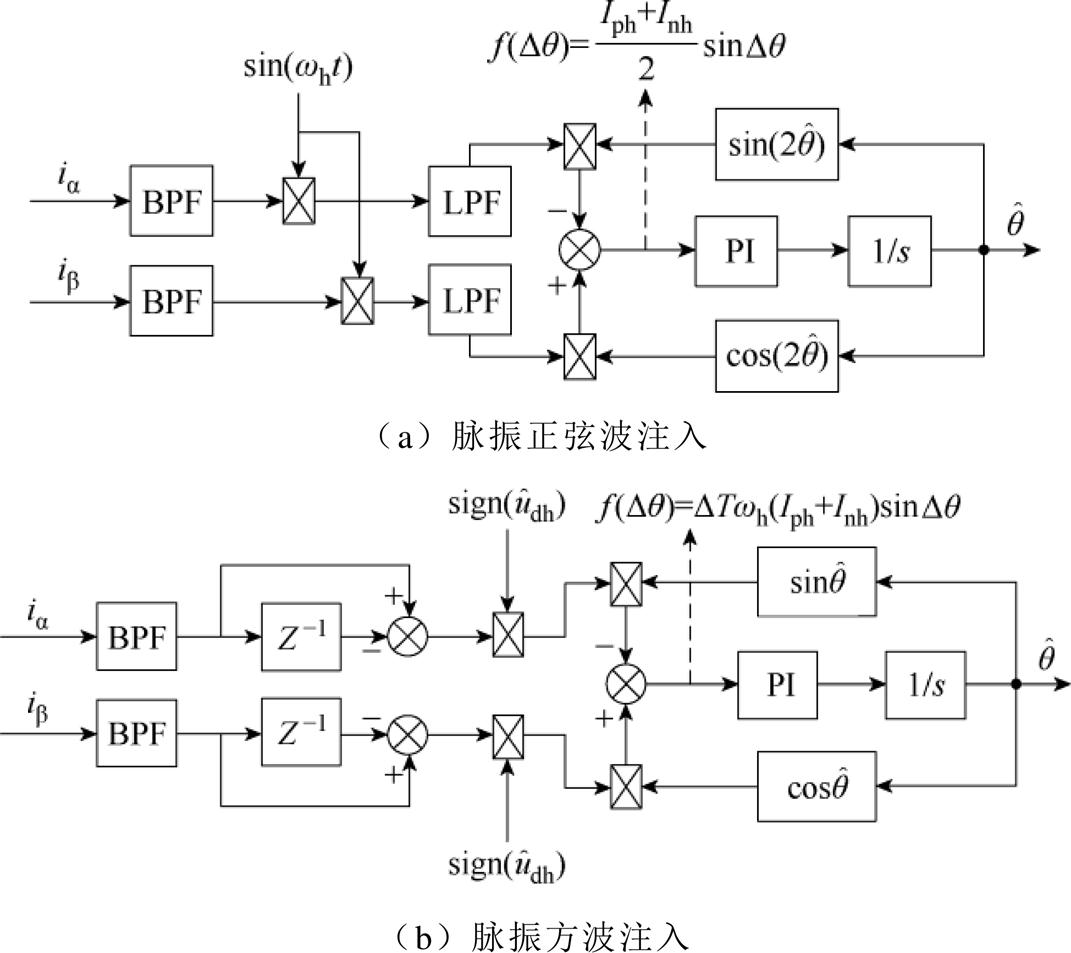
1)基于轴系的位置解算
向 轴注入高频余弦电压或者方波电压信号,获取轴系的电流响应,无需坐标变换直接进行位置解算,整个过程原理如图17所示。
轴注入高频余弦电压或者方波电压信号,获取轴系的电流响应,无需坐标变换直接进行位置解算,整个过程原理如图17所示。
2)基于轴系的位置解算
同样向轴注入高频余弦电压或者方波电压信号,获取轴系的电流响应,再将该轴系的电流变换到轴系下进行位置解算,过程如图18所示。
3.3.3 控制信号注入法的位置解算
根据控制信号的不同,选择不同的位置解算方法,以零电压矢量注入[8]和离散开关信号注入[14]为例进行说明。
1)基于轴系解算的零电压矢量注入法
在PWM周期之间插入零电压矢量,根据得到的q轴电流响应构造位置偏差信号,但是需要提前获得电机的定子电阻、q轴电感和永磁体磁链。位置解算原理如图19所示。图19中, 、
、 和
和 为零电压矢量注入产生的三相高频电流响应。
为零电压矢量注入产生的三相高频电流响应。
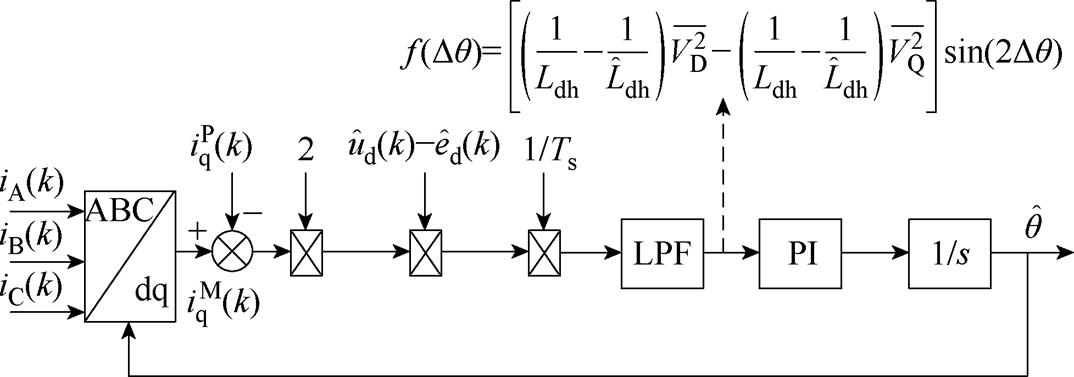
2)基于轴系解算的离散开关信号注入法
利用离散开关信号注入产生的纹波估计转子位置,在获得、 、第k时刻的估计d轴电压
、第k时刻的估计d轴电压 和集总电动势
和集总电动势 后结合LPF构造位置偏差信号,位置解算原理如图20所示。图20中,
后结合LPF构造位置偏差信号,位置解算原理如图20所示。图20中, 、
、 和
和 为第k时刻的三相电流,
为第k时刻的三相电流, 、
、 分别为电压控制量VD、VQ的二次方均值。
分别为电压控制量VD、VQ的二次方均值。
3.4 闭环负反馈下位置解算统一框架的构建与分析
为了辨识出转子位置,上述闭环结构的位置解算方法可以视为锁相环的具体应用。同时,从自动控制原理的思想出发,有目的的行为往往伴随负反馈调节作用,电机转子位置解算的过程也存在负反馈控制。因此,总结并建立闭环负反馈下转子位置辨识的统一负反馈框图以及上述各种位置解算方法的负反馈化解释,如图21所示。统一负反馈形式的结构框图均采用单位负反馈,包含偏差信号的形成、调节器、执行器和被控对象4个环节。以转子位置偏差函数趋近于零为目标,一旦保持该目标实时兑现,对应的角度辨识值即可代表电机转子的实际位置。因为不同的信号注入形式和不同坐标轴系的选择,导致产生不同的输出响应,在构建误差函数时需要采用不同方法,甚至需要利用不同的外部输入信息。图21所示的统一形式位置解算方法将闭环结构下多种情况的位置解算归纳为一种具有负反馈特征的共性算法,对于学习和认识转子位置辨识技术具有指导性意义,可以在此基础上进行改进和创新。
对比转子位置测量和估计方法可以发现,两种方法在获取转子位置时都需要两步:第一步是注入激励信号产生输出响应,第二步是对输出响应进行位置解算。而且,由于感应同步器和旋转变压器诞生较早,表3中给出的基于感应同步器的位置解算方法是后续转子位置估计方法的基础,位置解算过程多数能够在表3中找到对应的雏形。直接测量采用的位置解算方法有鉴幅型和鉴相型两种,而间接估计采用的位置解算方法有幅值解调和相位解调两种,可以根据实际需要灵活选择应用。基于AD2S80A与基于脉振正弦波电压注入、方波电压注入和控制信号注入的位置解算方法同属于幅值解调,基于负序电流和零序电压的旋转高频电压注入法属于相位解调算法。上述位置解算方法的原始技术可以追溯到广播信号的调制和解调过程,读者可以扩展阅读,本文不再讨论。同时,两类PMSM转子位置解算方法的位置偏差信号还具有统一性,均是转子位置误差项的正弦函数。因此,不论是物理载体还是解调算法,PMSM转子位置获取的两类方法均存在相似性,进一步拓展了R. D. Lorenz教授和R. Kennel教授指出的“可以控制PMSM像旋转变压器一样工作”的观点[18, 40]。
对于依托高频电压信号注入的转子位置估计方法,偏差信号表明,当辨识转子初始位置时,辨识结果可能收敛 到
到 ,即收敛到PMSM的N极或S极,因此需额外进行转子的极性判断,这是与转子位置测量方法的差异点。可以采用短脉冲电压注入法[41]、2次谐波分量法[42]和载波频率成分法[43],并利用定子铁心的非线性磁化特性实现转子极性判断。
,即收敛到PMSM的N极或S极,因此需额外进行转子的极性判断,这是与转子位置测量方法的差异点。可以采用短脉冲电压注入法[41]、2次谐波分量法[42]和载波频率成分法[43],并利用定子铁心的非线性磁化特性实现转子极性判断。
4 转子位置获取的影响因素分析
4.1 物理载体中的影响因素
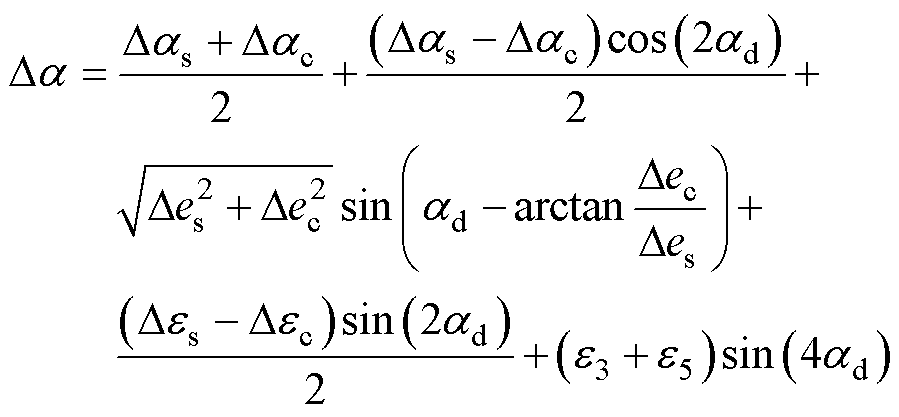
感应同步器和旋转变压器的结构类似,影响二者位置测量的因素也较为相似。感应同步器和旋转变压器的测量误差主要包括零位误差和细分误差。实际测得的输出绕组感应电动势电气零位与理论电气零位的差值归结为零位误差,绕组安放不对称、定转子安装偏心和倾斜都能引起零位误差。两个零位之间任意位置的误差定义为细分误差,包括幅值误差(两相输出电动势幅值不等)和函数误差(非有效电动势和输出电动势中谐波导致的误差)。因此,全误差 一般可以表示[44]为
一般可以表示[44]为
式中, 、
、 分别为正、余弦绕组在该极下的零位误差;
分别为正、余弦绕组在该极下的零位误差; 为转角(电角度);
为转角(电角度); 、
、 分别为正、余弦绕组非有效电动势幅值的归一化值;
分别为正、余弦绕组非有效电动势幅值的归一化值; 、
、 分别为正、余弦绕组输出电动势幅值误差的归一化值;
分别为正、余弦绕组输出电动势幅值误差的归一化值; 、
、 分别为正、余弦绕组输出3、5次谐波电动势幅值的归一化值。
分别为正、余弦绕组输出3、5次谐波电动势幅值的归一化值。
PMSM自身结构所导致的位置估计误差主要由齿槽效应、绕组分布不对称、磁路过饱和、转子磁极不对称等因素引起[45]。此外,PMSM的物理模型简化也会引起位置估计误差,旋转高频电压注入法、脉振正弦波(方波)电压注入法、零序电流导数测量法和PWM载波频率法均忽略了定子电阻和反电动势的影响,其次忽略了磁场交叉耦合产生的dq轴高频互感的影响。查阅文献[9, 46-48]总结出高频信号注入法物理模型简化对估计精度的影响,见表4。
表4 高频信号注入法物理模型简化的影响比较
Tab.4 Comparison of the effects of simplifying physical model using high-frequency signal injection method
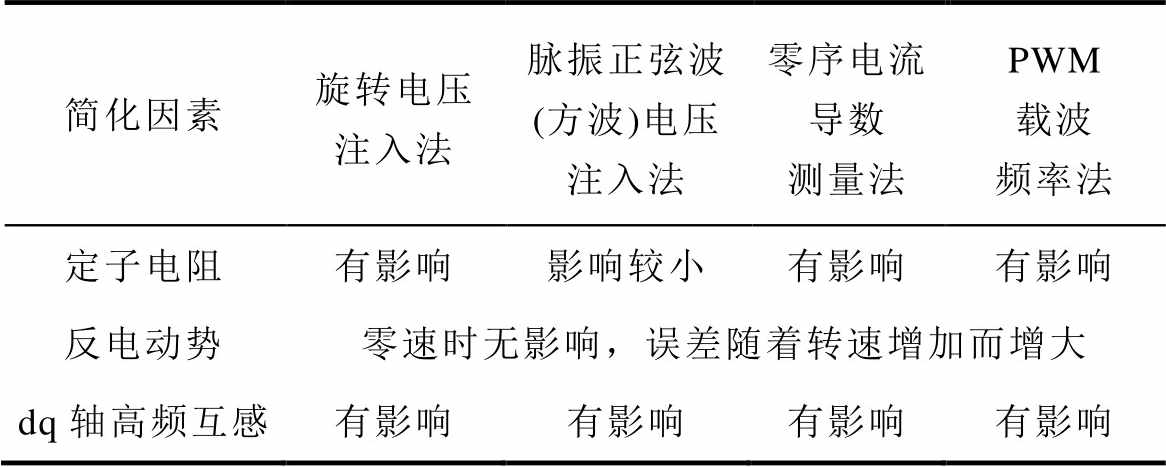
简化因素旋转电压注入法脉振正弦波 (方波)电压注入法零序电流导数测量法PWM载波频率法 定子电阻有影响影响较小有影响有影响 反电动势零速时无影响,误差随着转速增加而增大 dq轴高频互感有影响有影响有影响有影响
4.2 位置解算中的影响因素
感应同步器和旋转变压器利用解码芯片进行位置解算的误差来自信号处理部分,主要受激励信号、参考信号、滤波器、PI调节器参数等因素的影响。激励信号幅值影响输出绕组感应电动势的大小,频率影响输出绕组感应电动势的相移程度;参考信号相移影响动态位置的测量精度,误差与转速成正比,与激励信号频率成反比;相敏解调器中LPF会引入相位延迟;PI调节器的参数设置也会带来影响。
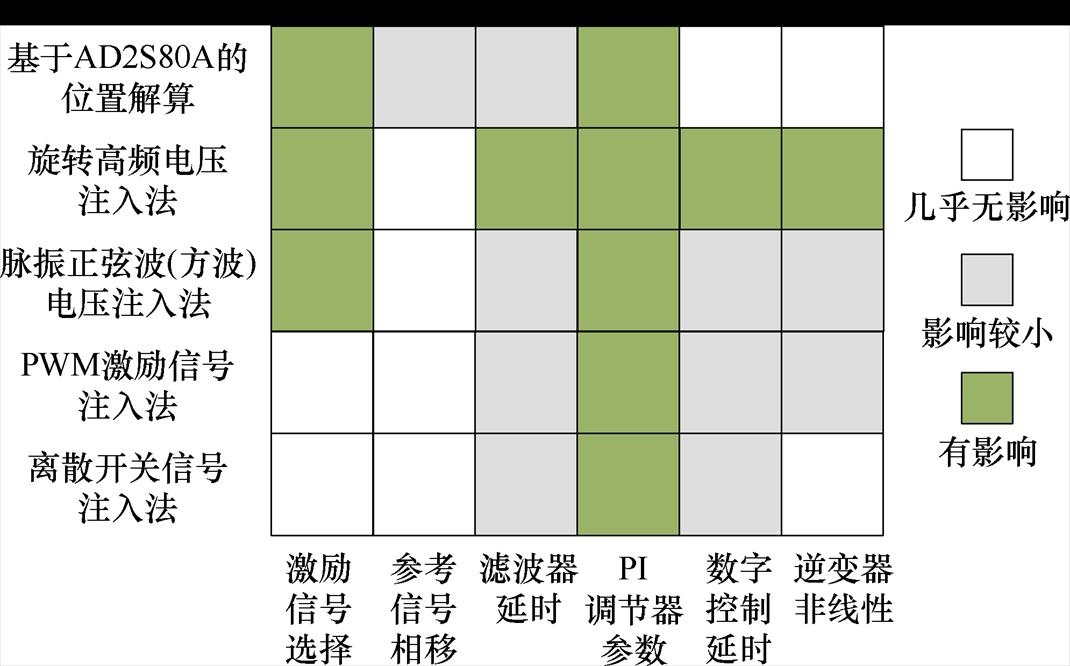
旋转高频电压注入法、脉振正弦波(方波)电压注入法、PWM激励信号注入法和离散开关信号注入法与AD2S80A芯片具有相似性,影响因素具有共性[9, 13-14, 48-51]。此外,估计方法以PMSM为载体,还要求数字控制器和三相逆变器配合工作,因此解算过程中还会受到数字控制延时和逆变器非线性的影响[23, 47]。比较上述位置解算方法的影响因素,如图22所示。图22说明了基于解码芯片的位置解算影响因素少,影响程度小,而估计方法的位置解算影响因素多,部分方法的影响程度较小。相比而言,依托传感器测量方法的物理载体导致的影响更为明显,而依托PMSM估计方法的影响更多来自模型简化,这一结果进一步说明估计方法对物理载体的要求不高,对位置解算方法的要求更为严格。
5 各种方法的优缺点与关键技术
5.1 测量方法和估计方法的对比
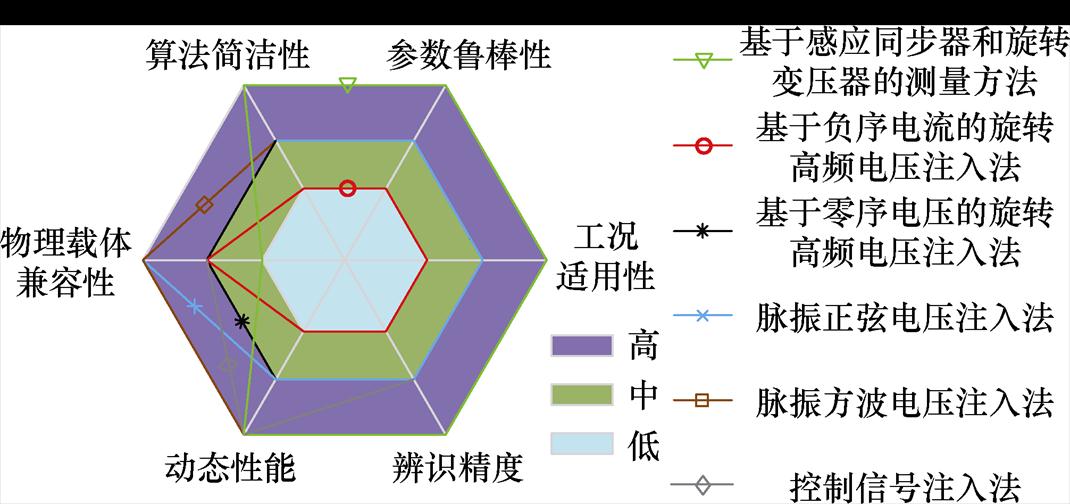
PMSM转子位置测量和估算方法一直在不断更新和完善,新方法不断涌现,每种方法均具有一定的优势,但也无法回避自身缺陷,本文从物理载体兼容性、算法简洁性、参数鲁棒性、工况适用性、辨识精度和动态性能几个方面评估各种算法的综合特征,如图23所示;同时相关文献也曾论述各种位置获取方法的优缺点,借助文献[4, 14-15, 26, 52-56],归纳整理了四类方法的对比结果,见表5。
表5 四类位置测量和估计方法的性能比较分析
Tab.5 Performance comparative analysis of four types of position measurement and estimation methods

测量和估计方法名称位置解算方法优缺点 基于感应同步器和旋转变压器的测量方法基于AD2S80A的感应同步器位置解算[52]精度在1角秒以内,可靠性高;但可能需要粗细通道组合和补偿 基于AD2S1200的旋转变压器位置解算[53]角度解码实时性好、准确度高;但可能需要设计相应的电路 旋转高频电压注入法基于电流响应的位置解算[54]提高了转子位置估计精度,避免了电阻等非理想因素的影响;但仍然需要使用较多滤波器,动态性能可能没有得到改善 基于电压响应的位置解算[55]转子位置估计信噪比和带宽高,具有更高的极性辨识灵敏度;但对硬件设备有更高的要求 脉振高频电压注入法正弦波注入下的位置解算[15]采用自适应线性神经网络滤波器代替传统BPF,显著提高电机工作速度区;但滤波器参数设置和调优需要一定技巧 方波注入下的位置解算[56]能准确快速地估计转子位置,改善高频转矩脉动;但需要查表使电机工作在最大转矩电流比工作点,增加了系统的运算负担 三角波注入下的位置解算[26]相比于传统随机正弦波和方波注入,随机三角波电压注入具有最小的高频噪声;但多次坐标变换导致位置解算相对复杂 控制信号注入法基于PWM信号激励的位置解算[4]对传统的INFORM法进行改进,通过降低电流采样干扰提高位置估计精度;但对算法提出了更高的要求 基于有限集模型预测控制的位置解算[14]利用了离散开关控制的固有激励,无需额外注入信号和复杂的位置信号提取;高速区较大的电流纹波限制了部分场合的应用
5.2 关键技术展望
1)改进物理载体结构助力转子位置辨识
对于感应同步器和旋转变压器而言,随着系统集成化的不断提高和制造工艺的不断成熟,要求传感器具有更高的测量精度。可以考虑轴向结构、转子无绕组结构、多线圈结构、新的绕线方式等。对于PMSM而言,依托信号注入的转子位置估计方法利用了电机的凸极特征,而低凸极比特性将限制此类位置估计方法的适用性,降低信噪比与位置估计精度。因此,可以改进电机结构、增强电机的凸极性,包括在转子内部设置阶梯状磁障利用磁路不对称性提升电机凸极比,以及在永磁体间嵌入高磁阻材料构建混合永磁-磁阻结构增强交直轴电感差异。
2)改进位置解调算法提高精度和动态性能
在提高位置估计精度方面:引入新的输出响应提取和处理手段,利用神经网络替代传统滤波器算法,从高频电流响应中提取位置敏感特征,减小非理想因素的影响;将电机电磁方程嵌入神经网络,构建混合数据和物理驱动模型,减少对训练数据的依赖并提升参数变化下的位置估计精度;受限于控制器的计算资源,智能算法在负载突变或强干扰工况下的位置估计误差可能较大,需要通过模型与硬件协同优化。在提高位置估计动态性能方面:应尽量减少滤波器的使用,减小信号处理过程延时;利用强化学习动态调整高频信号的幅值、频率与注入轴系,实现动态性能和噪声抑制的自适应平衡。
3)电机转子位置辨识技术的发展及启示
从利用传感器测量电机转子位置到依靠状态信息估计转子位置,从注入额外信号产生激励响应到借用系统信号激发输出响应,从开环位置观测到闭环位置估计,是电机转子位置获取技术的演变过程,体现出逐渐摆脱对物理载体、输入信号以及数学模型的依赖,转而诉诸于信号处理技术和智能软件算法,以满足低成本、小体积、轻质量、高可靠性等要求。另外,可以预见无传感器技术在电机驱动系统中将有更大的发展,依靠可测的电压、电流信号在线估计驱动系统扰动、执行机构末端受力、系统振动噪声水平、关键部件温升和健康状态等。
6 结论
本文分析了基于高频信号注入的PMSM转子位置测量和估计方法,探讨了测量方法和估计方法的物理载体、位置解算方法、影响因素的共性以及差异,比较了主要方法的优缺点和关键技术,得出以下结论:
1)依托PMSM构建的转子位置估计方法,电机作为驱动与检测元件实现了功能复用,核心思想与感应同步器或旋转变压器的位置测量原理相通。
2)PMSM转子位置解算方法多采用锁相环结构,可以概括为控制理论视角下的负反馈调节,目的是保证位置偏差信号趋近于零,从而使得解算方法具有统一性特征。
3)PMSM转子位置信息隐含在所构建的正余弦函数的幅值或相位中,信息处理的目的在于从幅值或相位中解调出位置信号,信息处理过程可以在早期感应同步器的位置解算方法中找到答案。
4)PMSM转子位置测量方法的误差主要来源于传感器制造安装过程,解算方法的影响较小,估计方法的误差受电机本体影响较小,主要来自模型简化、激励注入和信号解调过程。
参考文献
[1] 王奇维, 李斌兴, 潘冠丞, 等. 基于转子位置误差解耦阻抗建模的永磁同步电机电感在线辨识方法[J]. 电工技术学报, 2025, 40(2): 439-451.
Wang Qiwei, Li Binxing, Pan Guancheng, et al. Impedance model based online inductance identi- fication method of permanent magnet synchronous motor decoupled from rotor position error[J]. Transa- ctions of China Electrotechnical Society, 2025, 40(2): 439-451.
[2] 罗力岩, 樊启高. 一种改进型永磁同步电机无模型预测电流控制策略[J]. 电工技术学报, 2025, 40(4): 1034-1045.
Luo Liyan, Fan Qigao. An improved model-free predictive current control strategy for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2025, 40(4): 1034-1045.
[3] 秦毅, 王阳阳, 彭东林, 等. 电感式角位移传感器技术综述[J]. 仪器仪表学报, 2022, 43(11): 1-14.
Qin Yi, Wang Yangyang, Peng Donglin, et al. Inductive angular displacement sensors technologies: a review[J]. Chinese Journal of Scientific Instrument, 2022, 43(11): 1-14.
[4] Luo Xin, Tang Qipeng, Shen Anwen, et al. A combining FPE and additional test vectors hybrid strategy for IPMSM sensorless control[J]. IEEE Transactions on Power Electronics, 2017, 33(7): 6104-6113.
[5] 陈涛, 周扬忠, 屈艾文, 等. 基于旋转高频电压注入的六相串联三相永磁同步电机系统转子初始位置解耦观测[J]. 电工技术学报, 2023, 38(8): 2073- 2085.
Chen Tao, Zhou Yangzhong, Qu Aiwen, et al. Decoupling observation of rotor initial position of six-phase and three-phase permanent magnet syn- chronous motors series-connected system based on rotating high-frequency voltage injection[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(8): 2073-2085.
[6] 张彦平, 尹忠刚, 苏明, 等. 基于共振扩张状态观测器的内置式永磁同步电机统一全速域无位置传感器控制[J]. 电工技术学报, 2023, 38(22): 6070- 6081.
Zhang Yanping, Yin Zhonggang, Su Ming, et al. Unified full speed sensorless control of interior permanent magnet synchronous motor based on resonance extended state observer[J]. Transactions of China Electrotechnical Society, 2023, 38(22): 6070- 6081.
[7] Hind D, Li Chen, Sumner M, et al. Realising robust low speed sensorless PMSM control using current derivatives obtained from standard current sen- sors[C]//2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 2017: 1-6.
[8] Zhang Guoqiang, Wang Gaolin, Xu Dianguo. Saliency- based position sensorless control methods for PMSM drives-a review[J]. Chinese Journal of Electrical Engineering, 2017, 3(2): 14-23.
[9] 于艳君, 王本振, 朱春波, 等. 载波频率成分法估算IPMSM转子位置的误差分析[J]. 电工技术学报, 2010, 25(12): 61-66.
Yu Yanjun, Wang Benzhen, Zhu Chunbo, et al. Analysis of rotor position estimated error for IPMSM using carrier frequency component method[J]. Transac- tions of China Electrotechnical Society, 2010, 25(12): 61-66.
[10] Briz F, Degner M W, Garcia P, et al. Rotor position estimation of AC machines using the zero sequence carrier signal voltage[C]//Conference Record of the IEEE Industry Applications Conference, 39th IAS Annual Meeting, Seattle, WA, USA, 2004: 1305-1312.
[11] 王菁, 颜建虎, 季国东, 等. 一种基于双位置观测器的永磁同步电机低速无位置传感器控制方法[J]. 电工技术学报, 2023, 38(2): 375-386.
Wang Jing, Yan Jianhu, Ji Guodong, et al. A sensor- less control method for permanent magnet syn- chronous machine based on dual position observers at low speed[J]. Transactions of China Electrotechnical Society, 2023, 38(2): 375-386.
[12] 许培林, 邓智泉, 王宇, 等. 12/10极永磁磁通切换电机转子初始位置检测[J]. 中国电机工程学报, 2013, 33(9): 104-114.
Xu Peilin, Deng Zhiquan, Wang Yu, et al. Initial rotor position detection of 12/10 flux-switching permanent magnet motors[J]. Proceedings of the CSEE, 2013, 33(9): 104-114.
[13] Rovere L, Formentini A, Gaeta A, et al. Sensorless finite-control set model predictive control for IPMSM drives[J]. IEEE Transactions on Industrial Electronics, 2016, 63(9): 5921-5931.
[14] 陈卓易, 邱建琪, 金孟加. 内置式永磁同步电机无位置传感器自适应集总电动势模型预测控制[J]. 电工技术学报, 2018, 33(24): 5659-5669.
Chen Zhuoyi, Qiu Jianqi, Jin Mengjia. Sensorless adaptive lumped electromotive-force model predictive control of interior permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2018, 33(24): 5659-5669.
[15] Accetta A, Cirrincione M, Pucci M, et al. Sensorless control of PMSM fractional horsepower drives by signal injection and neural adaptive-band filtering[J]. IEEE Transactions on Industrial Electronics, 2011, 59(3): 1355-1366.
[16] Wang Henghong, Wang Jiyao, Xu Wei. A high precision initial position estimation method for low saliency ratio machine based on image tracking[J]. IEEE Transactions on Power Electronics, 2023, 38(11): 13612-13624.
[17] 王恒泓, 王激尧, 徐炜, 等. 基于领域对抗网络的永磁同步电机初始位置估计[J]. 电工技术学报, 2025, 40(2): 425-438.
Wang Henghong, Wang Jiyao, Xu Wei, et al. Initial position estimation of surface permanent magnet synchronous motor base on domain-adversarial neural networks[J]. Transactions of China Electrotechnical Society, 2025, 40(2): 425-438.
[18] Ferreira O C, Kennel R. Encoderless control of industrial servo drives[C]//2006 12th International Power Electronics and Motion Control Conference, Portoroz, Slovenia, 2006: 1962-1967.
[19] Acarnley P P, Watson J F. Review of position- sensorless operation of brushless permanent-magnet machines[J]. IEEE Transactions on Industrial Elec- tronics, 2006, 53(2): 352-362.
[20] Sul S K, Kwon Y C, Lee Y. Sensorless control of IPMSM for last 10 years and next 5 years[J]. CES Transactions on Electrical Machines and Systems, 2017, 1(2): 91-99.
[21] Wang Gaolin, Valla M, Solsona J. Position sensorless permanent magnet synchronous machine drives: a review[J]. IEEE Transactions on Industrial Elec- tronics, 2019, 67(7): 5830-5842.
[22] 刘计龙, 肖飞, 沈洋, 等. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报, 2017, 32(16): 76-88.
Liu Jilong, Xiao Fei, Shen Yang, et al. Position- sensorless control technology of permanent-magnet synchronous motor-a review[J]. Transactions of China Electrotechnical Society, 2017, 32(16): 76- 88.
[23] 李浩源, 张兴, 杨淑英, 等. 基于高频信号注入的永磁同步电机无传感器控制技术综述[J]. 电工技术学报, 2018, 33(12): 2653-2664.
Li Haoyuan, Zhang Xing, Yang Shuying, et al. Review on sensorless control of permanent magnet synchronous motor based on high-frequency signal injection[J]. Transactions of China Electrotechnical Society, 2018, 33(12): 2653-2664.
[24] 马瑞卿, 陈鹏. 永磁同步电机初始位置辨识方法研究与进展[J]. 航空学报, 2024, 45(3): 028776.
Ma Ruiqing, Chen Peng. Research and development trend of initial position identification methods for permanent magnet synchronous motors[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(3): 028776.
[25] 倪荣刚, 蔡亚倩, 韩思雨, 等. 基于匝数气隙双分段的改进绕组函数解析分析方法[J]. 电气工程学报, 2023, 18(4): 66-73.
Ni Ronggang, Cai Yaqian, Han Siyu, et al. Modified winding function analytical analysis method based on segmentation of both coil and air gap distributions[J]. Journal of Electrical Engineering, 2023, 18(4): 66-73.
[26] 孙明阳, 和阳, 邱先群, 等. 随机频率三角波注入永磁同步电机无位置传感器降噪控制[J]. 电工技术学报, 2023, 38(6): 1460-1471.
Sun Mingyang, He Yang, Qiu Xianqun, et al. Random-frequency triangular wave injection based sensorless control of PMSM drives for audible noise reduction[J]. Transactions of China Electrotechnical Society, 2023, 38(6): 1460-1471.
[27] Chen Shuo, Ding Wen, Wu Xiang, et al. Sensorless control of IPMSM drives using high-frequency pulse voltage injection with random pulse sequence for audible noise reduction[J]. IEEE Transactions on Power Electronics, 2023, 38(8): 9395-9408.
[28] Xu P L, Zhu Z Q. Novel carrier signal injection method using zero-sequence voltage for sensorless control of PMSM drives[J]. IEEE Transactions on Industrial Electronics, 2016, 63(4): 2053-2061.
[29] Xu P L, Zhu Z Q. Novel square-wave signal injection method using zero-sequence voltage for sensorless control of PMSM drives[J]. IEEE Transactions on Industrial Electronics, 2016, 63(12): 7444-7454.
[30] Li Haoyuan, Zhang Xing, Yang Shuying, et al. Unified graphical model of high-frequency signal injection methods for PMSM sensorless control[J]. IEEE Transactions on Industrial Electronics, 2020, 67(6): 4411-4421.
[31] 杨健, 杨淑英, 李浩源, 等. 基于旋转高频电压注入的永磁同步电机转子初始位置辨识方法[J]. 电工技术学报, 2018, 33(15): 3547-3555.
Yang Jian, Yang Shuying, Li Haoyuan, et al. Initial rotor position estimation for IPMSM based on high frequency rotating voltage injection[J]. Transactions of China Electrotechnical Society, 2018, 33(15): 3547-3555.
[32] 鲁家栋, 刘景林, 卫丽超. 永磁同步电机转子初始位置检测方法[J]. 电工技术学报, 2015, 30(7): 105- 111.
Lu Jiadong, Liu Jinglin, Wei Lichao. Estimation of the initial rotor position for permanent magnet synchronous motors[J]. Transactions of China Elec- trotechnical Society, 2015, 30(7): 105-111.
[33] Sarma S, Agrawal V K, Udupa S. Software-based resolver-to-digital conversion using a DSP[J]. IEEE Transactions on Industrial Electronics, 2008, 55(1): 371-379.
[34] Shuang Bo, Zhu Ziqiang. A novel sensorless initial position estimation and startup method[J]. IEEE Transactions on Industrial Electronics, 2021, 68(4): 2964-2975.
[35] Sun Le, Nalakath S, Callegaro A D, et al. Investi- gation of a practical convex-optimization-based sensorless scheme for IPMSM drives[J]. IEEE Transactions on Power Electronics, 2019, 34(12): 12437-12452.
[36] Sun Le, Li Xiaoxiang, Chen Longmiao. Motor speed control with convex optimization-based position estimation in the current loop[J]. IEEE Transactions on Power Electronics, 2021, 36(9): 10906-10919.
[37] 吴春, 应王瑞, 郑露华, 等. 一种旋转变压器双采样差分位置解码方法[J]. 电工技术学报, 2024, 39(15): 4896-4908.
Wu Chun, Ying Wangrui, Zheng Luhua, et al. A dual-sampling differential position decoding method for resolvers[J]. Transactions of China Electro- technical Society, 2024, 39(15): 4896-4908.
[38] 王兴华, 孙纯祥, 周成岩. 基于AD2S80A的高精度测角测速系统设计[J]. 微电机, 2008, 41(10): 50-53, 80.
Wang Xinghua, Sun Chunxiang, Zhou Chengyan. High precision angle and velocity measuring system based on AD2S80A[J]. Micromotors, 2008, 41(10): 50-53, 80.
[39] 李浩源, 张兴, 杨淑英, 等. 基于旋转高频注入的内置式永磁同步电机初始位置检测算法[J]. 电工技术学报, 2018, 33(8): 1723-1731.
Li Haoyuan, Zhang Xing, Yang Shuying, et al. A detecting algorithm for initial position of interior permanent magnet synchronous motor based on rotating high frequency injection[J]. Transactions of China Electrotechnical Society, 2018, 33(8): 1723- 1731.
[40] Corley M J, Lorenz R D. Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds[J]. IEEE Transactions on Industry Applications, 2002, 34(4): 784-789.
[41] Wu Ximeng, Zhu Ziqiang, Wu Zhanyuan. A rotor initial position estimation method for surface- mounted permanent magnet synchronous machine[J]. IEEE Transactions on Energy Conversion, 2021, 36(3): 2012-2024.
[42] Raca D, Harke M C, Lorenz R D. Robust magnet polarity estimation for initialization of PM syn- chronous machines with near-zero saliency[J]. IEEE Transactions on Industry Applications, 2008, 44(4): 1199-1209.
[43] 李洁, 周波, 刘兵, 等. 表贴式永磁同步电机无位置传感器起动新方法[J]. 中国电机工程学报, 2016, 36(9): 2513-2520.
Li Jie, Zhou Bo, Liu Bing, et al. A novel starting strategy of sensorless control for surface mounted permanent magnet synchronous machines[J]. Pro- ceedings of the CSEE, 2016, 36(9): 2513-2520.
[44] 李海霞, 张嵘, 韩丰田. 感应同步器测角系统误差测试及补偿[J]. 清华大学学报(自然科学版), 2016, 56(6): 611-616.
Li Haixia, Zhang Rong, Han Fengtian. Error testing and compensation of an inductosyn-based angular measurement system[J]. Journal of Tsinghua Univer- sity (Science and Technology), 2016, 56(6): 611-616.
[45] 李景灿, 廖勇. 考虑饱和及转子磁场谐波的永磁同步电机模型[J]. 中国电机工程学报, 2011, 31(3): 60-66.
Li Jingcan, Liao Yong. Model of permanent magnet synchronous motor considering saturation and rotor flux harmonics[J]. Proceedings of the CSEE, 2011, 31(3): 60-66.
[46] Wang Jianmin, Gao Jianzhuo. Influence of speed EMF on position estimation error in carrier signal injection based sensorless control of PMSM[C]//2012 15th International Conference on Electrical Machines and Systems (ICEMS), Sapporo, Japan, 2012: 1-6.
[47] Raca D, Garcia P, Reigosa D, et al. A comparative analysis of pulsating vs. rotating vector carrier signal injection-based sensorless control[C]//2008 Twenty- Third Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 2008: 879-885.
[48] Staines C S, Caruana C, Raute R. A review of saliency- based sensorless control methods for alternating current machines[J]. IEEJ Journal of Industry Appli- cations, 2014, 3: 86-96.
[49] 李海斌, 蔡伟, 李国英. 圆感应同步器方位测角系统误差产生与消除[J]. 传感器技术, 2005, 24(6): 17-19, 22.
Li Haibin, Cai Wei, Li Guoying. Error source and elimination of inductosyn azimuth angular measure- ment system[J]. Journal of Transducer Technology, 2005, 24(6): 17-19, 22.
[50] 刘海东, 周波, 郭鸿浩, 等. 脉振高频信号注入法误差分析[J]. 电工技术学报, 2015, 30(6): 38-44.
Liu Haidong, Zhou Bo, Guo Honghao, et al. Error analysis of high frequency pulsating signal injection method[J]. Transactions of China Electrotechnical Society, 2015, 30(6): 38-44.
[51] Gabriel F, De Belie F, Neyt X, et al. High-frequency issues using rotating voltage injections intended for position self-sensing[J]. IEEE Transactions on Indu- strial Electronics, 2012, 60(12): 5447-5457.
[52] Song Li, Kang Jianbing, Li Jing. A design of indu- ctosyn angle measurement system based on AD2S80A and FPGA[C]//2017 36th Chinese Control Conference (CCC), Dalian, China, 2017: 5350-5353.
[53] 汪剑鸣, 袁臣虎, 刘瑞, 等. 基于四线旋转变压器及AD2S1200的叉车线控转向永磁同步电机角度解码研究[J]. 电工技术学报, 2015, 30(增刊2): 95-100.
Wang Jianming, Yuan Chenhu, Liu Rui, et al. Research on PMSM rotor position decoding of the forklift steer-by-wire system based on the four-line resolver and AD2S1200[J]. Transactions of China Electrotechnical Society, 2015, 30(S2): 95-100.
[54] 麦志勤, 肖飞, 刘计龙, 等. 基于改进型自调整轴系幅值收敛电流解调算法的旋转高频电压注入法[J]. 电工技术学报, 2021, 36(10): 2049-2060.
Mai Zhiqin, Xiao Fei, Liu Jilong, et al. Rotating high-frequency voltage injection method based on improved self-adjusting frame amplitude convergence current demodulation algorithm[J]. Transactions of China Electrotechnical Society, 2021, 36(10): 2049- 2060.
[55] Xu Peilin, Zhu Z Q. Initial rotor position estimation using zero-sequence carrier voltage for permanent- magnet synchronous machines[J]. IEEE Transactions on Industrial Electronics, 2017, 64(1): 149-158.
[56] Lin Zhichen, Li Xinmin, Wang Zhiqiang, et al. Minimization of additional high-frequency torque ripple for square-wave voltage injection IPMSM sensorless drives[J]. IEEE Transactions on Power Electronics, 2020, 35(12): 13345-13355.
Characteristic Analysis of PMSM Rotor Position Measurement and Estimation Methods with Signal Injection
Fu Xinghe1 Wang Xinyuan1 Liu Chengjun2
(1. School of Electrical Engineering Southeast University Nanjing 210096 China 2. School of Electrical Engineering and Automation Harbin Institute of Technology Harbin 150001 China)
Abstract The essence of inductosyn and resolver technology is a “generator” based on the principle of electromagnetic induction. It can be viewed as a rotor position measurement method based on the injection of high-frequency signals. The high-frequency signal injection method in rotor position estimation is also excited by a high-frequency signal. However, the literature mainly focuses on the internal comparison of measurement or estimation methods. The specific structural differences, algorithm correlation, and parameter sensitivity of the two methods require further study.
The position measurement or estimation method is interpreted from the perspective of system identification. It can be summarized as two steps: applying excitation to the physical carrier and generating an output response, and processing the output response to obtain state information. Under the premise of high-frequency signal injection, PMSM rotor position acquisition methods can be divided into two categories: direct measurement methods based on inductosyn or resolver, and indirect estimation methods based on the motor. The physical carrier of the rotor position acquisition method based on high-frequency signal injection is simplified from the initial “sensor + motor” combination to a single-motor process, where the motor serves as the detection element and the driving motor.
The physical carrier characteristics of the two methods are compared, and the equivalent circuit diagrams of the physical carriers are given. Although the rotor position estimation method does not need additional position detection elements, it is comparable to transferring the problem to the system control level. The position solution method in rotor position acquisition is divided into open-loop and closed-loop position solutions. The closed-loop position solution method, represented by the phase-locked loop, is emphatically analyzed. The unified negative feedback block diagram of rotor position identification under closed-loop negative feedback and the negative feedback interpretation are summarized and established. Compared with the measurement method, the PMSM estimation method has a greater impact on model simplification and the signal processing process. Finally, the comprehensive characteristics, advantages, and disadvantages of the measurement and estimation methods are compared, and the key technology prospects are given.
The following conclusions are drawn. (1) The core idea of the rotor position estimation method is the same as the position measurement principle of inductosyn or resolver. (2) The solution method of the PMSM rotor position mainly adopts the phase-locked loop structure. The purpose is to ensure that the position deviation signal approaches zero, so that the solution method exhibits unity characteristics. (3) The PMSM rotor position information is hidden in the amplitude or phase of the constructed sine and cosine functions. The purpose of information processing is to extract the position signal from the amplitude or phase. (4) The error of the PMSM rotor position measurement method mainly comes from the process of sensor manufacturing and installation, and the influence of the solution method is minor. The processes of model simplification, excitation injection, and signal demodulation primarily influence the error of the estimation method.
Keywords:Permanent magnet synchronous motor (PMSM), rotor position, demodulation algorithm, inductosyn, resolver
中图分类号:TM341
DOI: 10.19595/j.cnki.1000-6753.tces.250170
国家自然科学基金资助项目(52377038)。
收稿日期 2025-02-03
改稿日期 2025-04-09
作者简介
付兴贺 男,1978年生,博士,副教授,研究方向为高温特种电机及其控制、伺服系统多源异构扰动抑制。
E-mail: fuxinghe@seu.edu.cn(通信作者)
王新元 男,2000年生,硕士研究生,研究方向为永磁同步电机无位置传感器控制。
E-mail: 220222804@seu.edu.cn
(编辑 崔文静)


 (1)
(1)
 轴系的位置解算原理框图
轴系的位置解算原理框图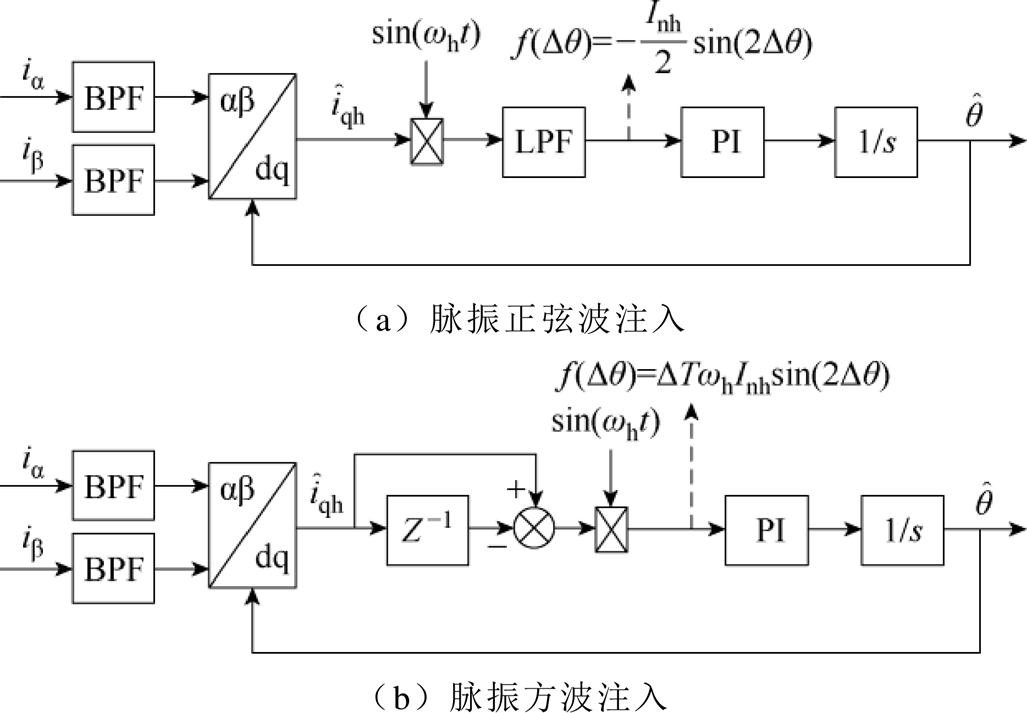
 轴系的位置解算原理框图
轴系的位置解算原理框图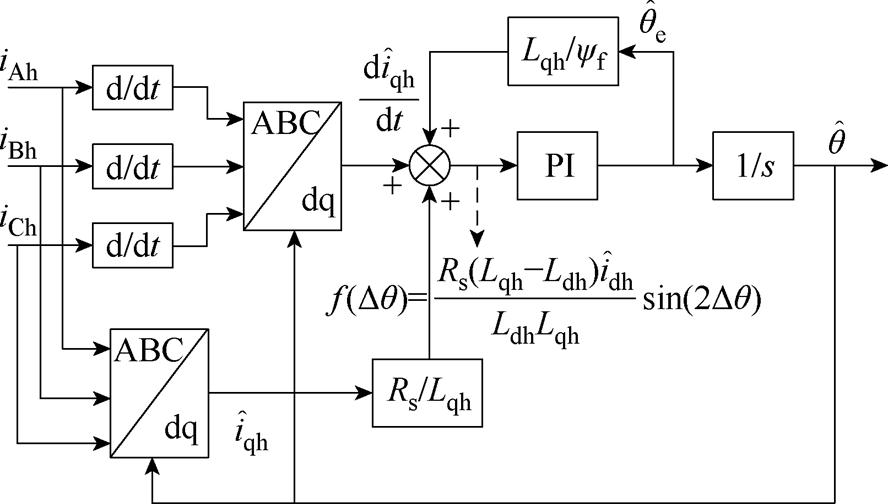

 (3)
(3)