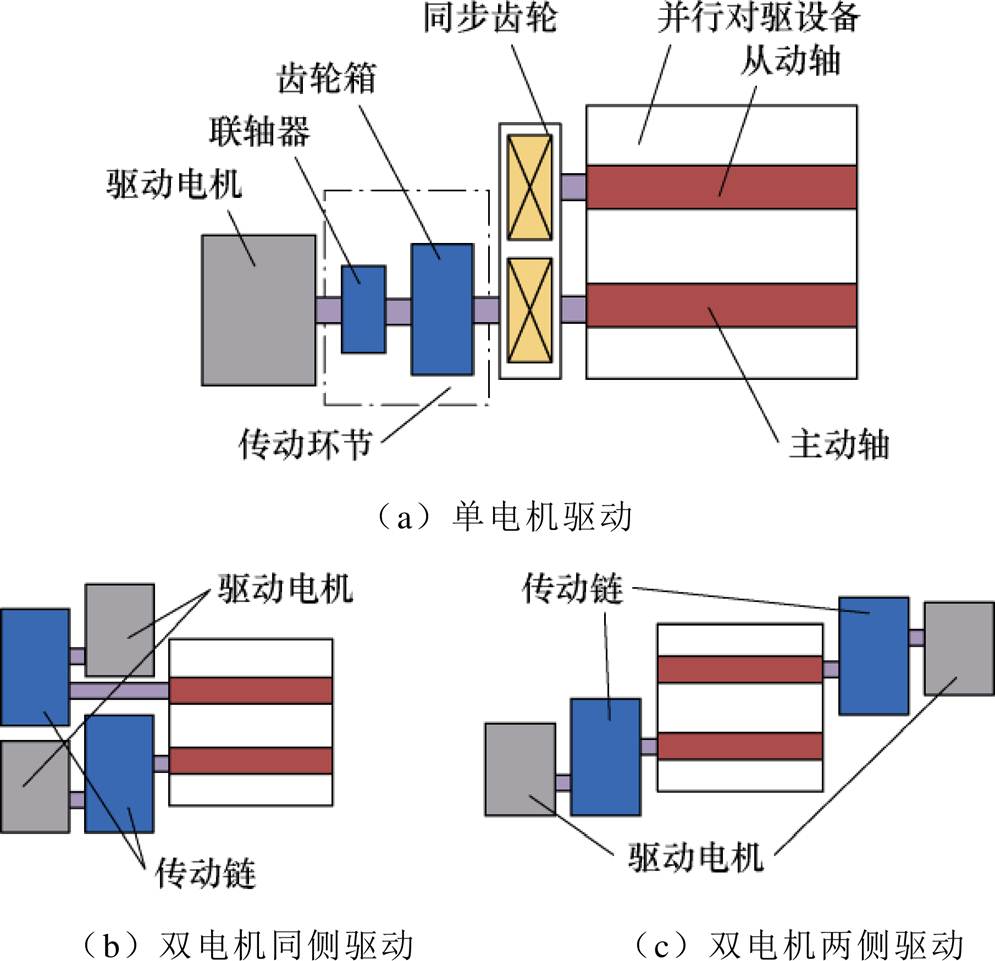
图1 并行对驱类机械设备的驱动方式
Fig.1 Driving mode of parallel counter-drive mechanical equipment
摘要 针对并行对驱类机械设备的驱动需求,该文提出一种双并列转子永磁同步电机(DR- PMSM)。采用该电机驱动具有系统效率高、体积小、旋转同步性严格、无齿轮传动等优势,该文对其设计方法和电磁特性进行研究。首先,阐述DR-PMSM的拓扑结构,定义新增设计参数,分析其运行原理,研究各部分磁路对电机的作用效果;其次,探究此类电机的一般性通用设计流程,给出各个关键环节的设计方法和确定原则;再次,在此基础上,对一台DR-PMSM进行设计,构建有限元模型,分析电机的电磁特性,验证电机的运行原理和设计方法的正确性,并揭示各种电磁特性不对称或不平衡的原因;然后,探讨关键参数改变对关键性能的影响规律,给出关键参数选取和优化调整的思路;最后,研制一台DR-PMSM,搭建试验平台并进行测试,验证所提设计方法的可靠性。
关键词:双并列转子 永磁同步电机 电磁设计 电磁特性
电机系统能耗是工业能耗的最主要来源[1],在国家“碳中和、碳达峰”的背景下,为了提高电机系统效率和运行品质,工业电机系统亟待进行高效节能改造[2-4]。工信部在其所发布的《电机能效提升计划(2021-2023)》中指出,针对使用变速箱、耦合器的传动系统,鼓励采用低速直驱和高速直驱式永磁电机[5],这为工业电机系统的节能降耗指明了方向。
在双螺杆泵、双螺杆压缩机、二辊轧机、对辊式破碎机等并行对驱类机械设备中,目前的驱动方式仍以单电机主从驱动为主流,部分特定场合也存在采用两台电机分别驱动的情况,两种驱动方式示意图如图1所示。在图1a中,一台驱动电机经传动链将转矩传递给主动轴,通过同步齿轮带动从动轴,从而实现两轴的反向同步旋转。这种传动方式存在设备体积大、系统效率低、机械噪声大、需要定期维护等问题。此外,单电机驱动多为感应电机+齿轮箱变速[6-8],导致整个传动系统存在较大的能量损耗,尽管采用永磁电机直驱的方式在一定程度上能够提高系统效率[9-12],但由于同步齿轮的存在,并不能从根本上解决上述问题。
图1 并行对驱类机械设备的驱动方式
Fig.1 Driving mode of parallel counter-drive mechanical equipment
在图1b和图1c中,取消了同步齿轮,采用两台独立驱动电机分别驱动两轴。然而,由于两轴之间的距离有着严格的尺寸限制,当双电机同侧驱动时,为了有足够的空间容纳各个传动环节,需要对各个环节的安置位置进行改变,系统可靠性差;当双电机两侧驱动时,系统体积庞大。因此,此种方式也不能从根本上解决问题。此外,有学者提出双电机同侧驱动时采用一台传统电机+一台凹形定子电机驱动的方式[13],凹形定子电机的“凹槽”为另一台传统电机驱动的传动环节提供空间,但此种方式不易保证两轴旋转的同步性。
针对上述两种驱动方式存在的问题,分析可知,取消机械同步齿轮且采用永磁同步电机直驱才能将其彻底解决。因此,文献[14]提出了定子连体双转子同步并行直驱永磁电机,但所提出的设计方法不够系统和全面,各种结构参数的选择和参数之间的约束尚不明确。本文在前人的研究成果之上,对该类电机结构参数进行重新定义和完善,提出一种新型双并列转子永磁同步电机(Dual-parallel Rotor Permanent Magnet Synchronous Motor, DR-PMSM),用以直接驱动并行对驱类机械设备。采用DR- PMSM驱动能够取消整个传动系统的冗余环节,具有系统体积小、系统效率高、无齿轮传动、机械噪声小等优点,在并行对驱类机械设备领域具有良好的应用前景。
随着现代工业自动化的不断进步和发展,各种具有全新拓扑结构的电机不断涌现[15-18],但国内外对于与DR-PMSM具有相似结构电机的研究仍处于探索阶段。国内方面,文献[19]研究了定子连体双轴电机的稳态运行特性,为探究电机在稳定状态下的运行特性奠定了基础。文献[20-21]对此类电机的转矩脉动产生机理和转子不平衡电磁力来源进行了分析,并提出了相应的抑制方法,为此类电机的电磁性能优化问题提供了理论支撑。文献[22]研究了电机的非对称负载运行特性,这对于电机在实际应用中应对复杂工况具有重要意义。国外对此类电机的研究几乎为空白。综上所述,现有研究是针对DR-PMSM运行特性和性能优化等方面开展,缺乏系统性的电磁设计方法。由于研究电机设计问题是研究DR-PMSM其他问题的前提,因此,探索和完善DR-PMSM的设计理论具有重要的学术意义和工程价值。
本文的研究工作旨在为DR-PMSM的高效设计和合理优化提供理论基础,主要关注其电磁计算方面,其他物理场的分析暂未讨论。首先,概述DR- PMSM的拓扑结构及运行原理;其次,研究该类电机的一般性设计方法和原则;再次,采用有限元模型分析电机的电磁特性;然后,探究关键参数对关键性能的影响;最后,搭建样机试验平台,验证设计理论的可靠性和有限元模型的准确性。
DR-PMSM的拓扑结构如图2所示,图2a所示为电机整体结构,图2b所示为电磁结构。DR-PMSM可以视为由两个传统电机各自切割掉部分定子后拼接而成。其整体结构由转轴、有绕组连体定子铁心、轴承、机座、端盖等部件组成,为减少密封数量,轴伸端两个轴承与轴尾端两个轴承分别密封。DR-PMSM的电磁结构由一个连体定子铁心、左右侧两套绕组、左右侧两个转子组成。两个转子采用表贴式永磁转子结构,转子铁心上均匀分布永磁体,单个转子处于相邻位置的永磁体极性相反,沿竖直中心线处于对称位置的两个转子永磁体极性相反。
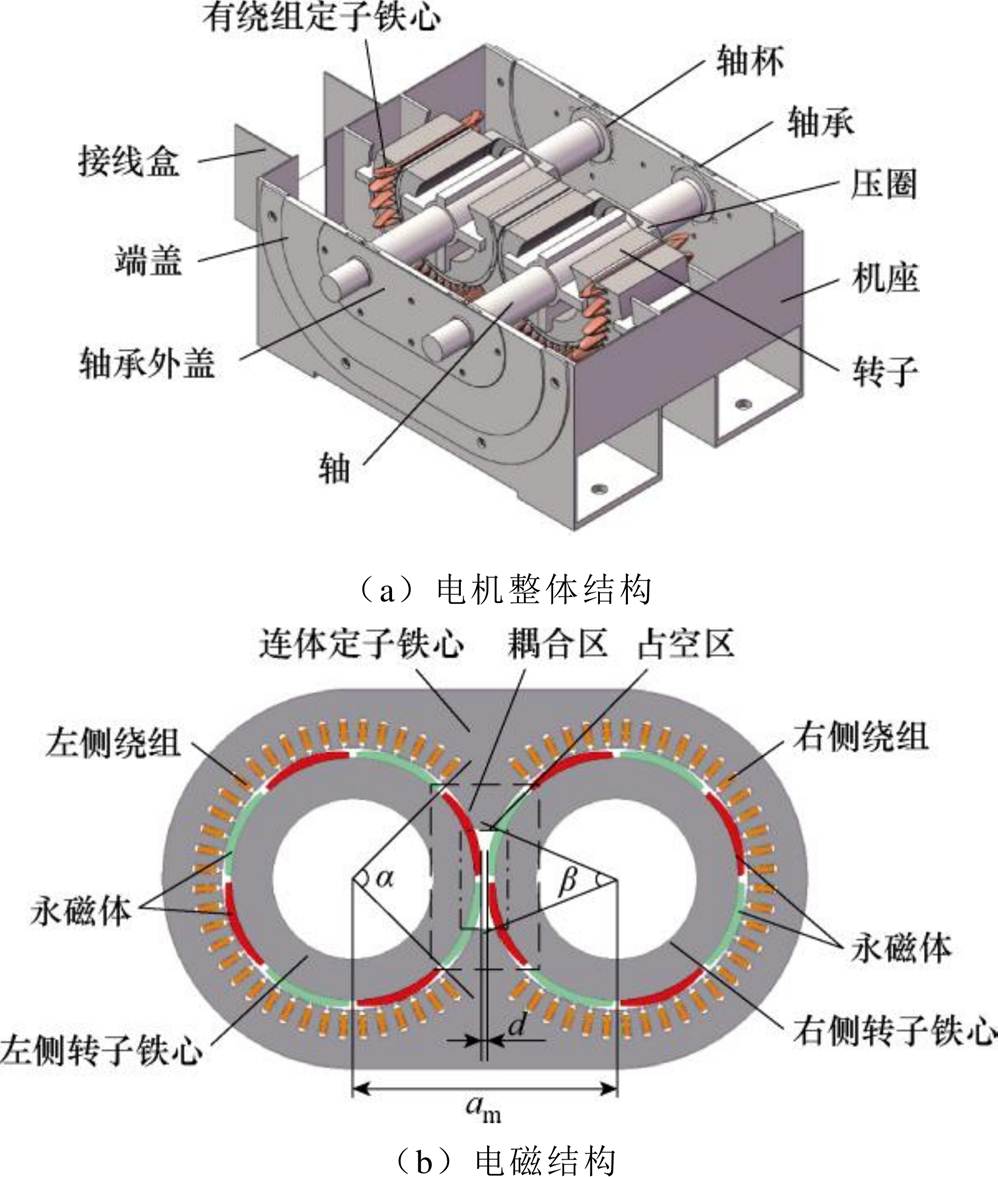
图2 DR-PMSM的拓扑结构
Fig.2 Topological structure of DR-PMSM
将定子铁心无绕组分布的区域定义为耦合区,对应图2b中的虚线框内部分,耦合区所占的圆心角为耦合角a。将耦合区内无定子铁心的区域定义为占空区,对应图2b中的点画线框内部分,占空区所占的圆心角为占空角b。两个永磁转子之间的最小距离定义为耦合间距d。两个转轴圆心之间的距离简称为轴心距am。上述结构参数是两台传统电机拼接区设计的关键,也是直接影响耦合区磁路设计的关键。
随着转子位置的改变,DR-PMSM耦合区内的磁通路径会发生周期性变化。图3给出了不同转子位置时DR-PMSM主要的磁通路径。在非耦合区内,电机的磁路与传统旋转电机的磁路基本无异,如图3a和图3b中的磁路1所示。当两侧绕组分别通以三相对称电流时,在左右两个气隙形成一对反向旋转的磁场,与各自的转子相互作用,产生一对反向旋转的电磁转矩,从而实现两个转子的对转运动。
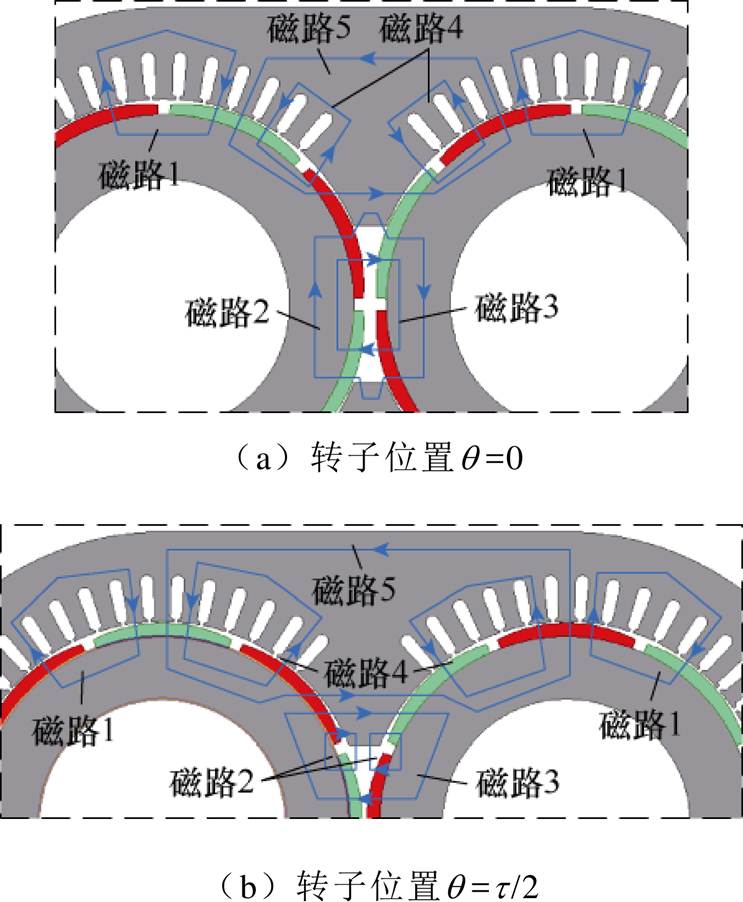
图3 DR-PMSM的磁通路径
Fig.3 Magnetic flux paths of DR-PMSM
在耦合区内,无论转子位置处于q=0时还是q=t/2(q为转子位置角,t为转子极距)时,单个永磁体产生的磁通都共有四条路径,即磁路2、磁路3、磁路4、磁路5。在磁路2中,一侧转子永磁体N极产生的磁通经过占空区流入连体定子铁心端部,再经过占空区流入另外一侧转子永磁体S极(见图3a),或经过气隙流入同侧转子永磁体的S极(见图3b)。可以推断,磁路2使得DR-PMSM具有类似于永磁直线电机的端部效应,从而产生端部力矩。在磁路3中,一侧转子永磁体N极产生的磁通经过占空区流入另外一侧转子永磁体S极(见图3a),或经过气隙流入连体定子铁心端部再经气隙流入另外一侧转子永磁体S极(见图3b)。可以推断,磁路3使得DR-PMSM具有“磁齿轮”效应,从而产生永磁齿轮传递转矩。磁路4是由同一侧转子靠近耦合区边界的两个相邻永磁体建立的,此条路径只交链了单侧电机靠近端部的绕组。磁路5是由两侧转子靠近耦合区边界的两对相邻永磁体共同建立的,此条路径同时交链了两侧电机靠近端部的绕组。可以推断,磁路4使得单侧电机三相绕组的自感不再对称,磁路5使得两侧电机的部分相绕组存在互感。
将DR-PMSM各条磁路的主要效果见表1。其中,磁路2~磁路5的存在使电机在额定运行时的转矩脉动增加,因此,在进行此类电机设计时,应同时注意端部效应、“磁齿轮”效应以及电感参数不对称现象对电机性能的影响。
表1 DR-PMSM各条磁路的主要效果
Tab.1 Main effect of each magnetic flux path of DR-PMSM
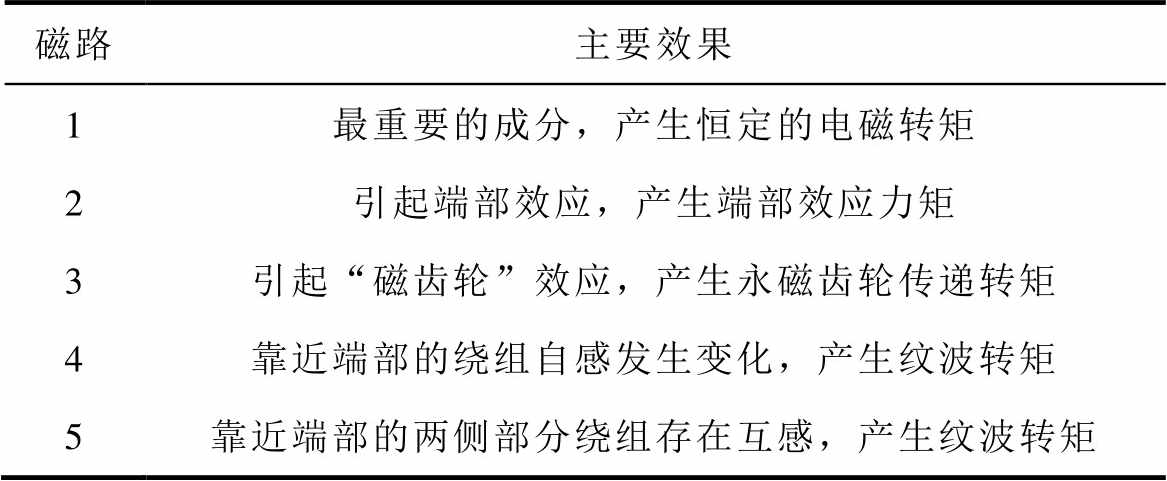
磁路主要效果 1最重要的成分,产生恒定的电磁转矩 2引起端部效应,产生端部效应力矩 3引起“磁齿轮”效应,产生永磁齿轮传递转矩 4靠近端部的绕组自感发生变化,产生纹波转矩 5靠近端部的两侧部分绕组存在互感,产生纹波转矩
DR-PMSM可以视为两个传统电机切除部分定子,拼接并填充定子铁心后而形成的,具体的拼接过程由图4给出。由图4可知,设计DR-PMSM时,可以先从单台传统电机出发,完成两台传统电机的拼接以后,再对新结构进行优化。
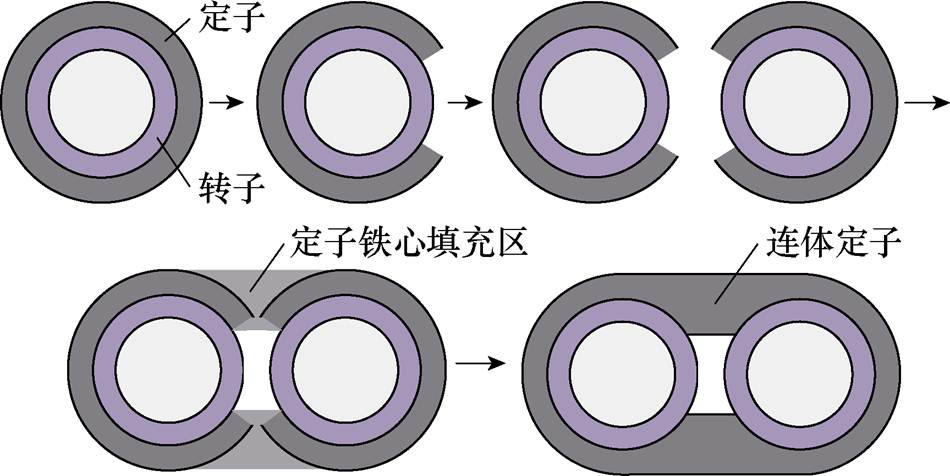
图4 拼接过程示意图
Fig.4 Splicing process diagram
提出的DR-PMSM具体设计流程如图5所示,整个流程包含前期准备、单边传统电机设计及优化和双并列转子电机设计及优化三个部分。每部分对应一个关键环节,三个关键环节分别为耦合角的确定、单边传统电机主要尺寸的确定和DR-PMSM的优化设计。将分别对每个关键环节的实施过程进行研究。
为了保证切除部分定子后的单边传统电机绕组仍为三相对称,切除的定子部分应以单元电机为单位。对于一个槽数为Ns、极对数为p的传统电机,存在一个最大公约数gcd(Ns, p),使整个电机最多可以拆分为gcd(Ns, p)个单元电机。则每个单元电机的槽数Ns0和极对数p0分别为
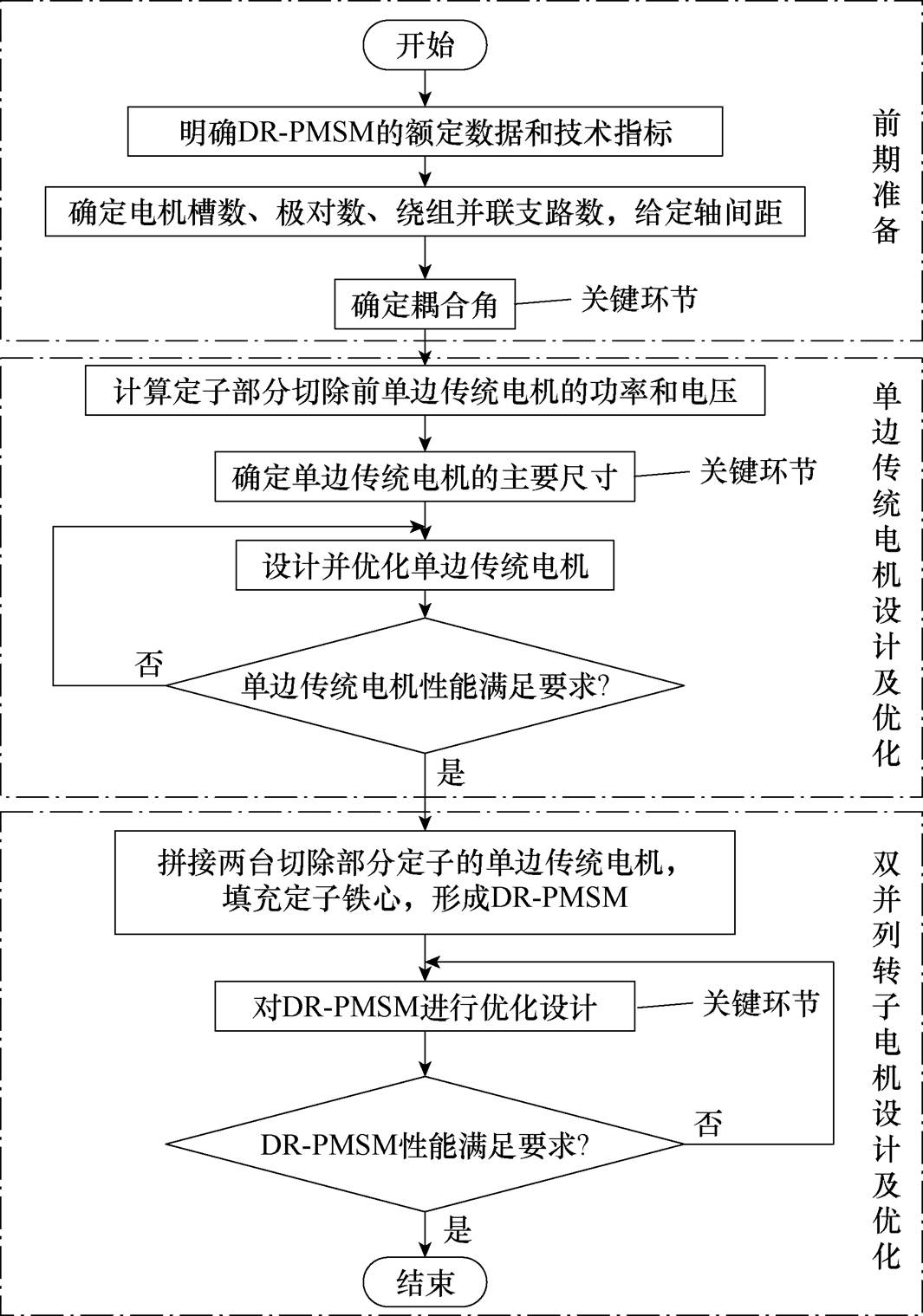
图5 DR-PMSM设计流程
Fig.5 Design flow of DR-PMSM
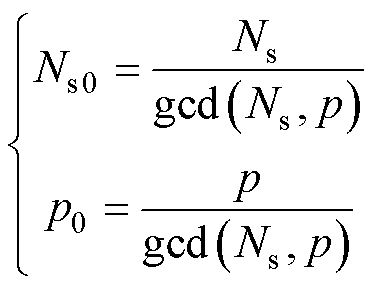 (1)
(1)
式(1)表明,在单元电机中,每2p0个磁极对应Ns0个槽,每个单元电机的感应电动势、磁动势都是以2p0个磁极为周期,每相绕组的最大并联支路数也为gcd(Ns, p)。因此,单边传统电机可以切除的单元电机个数kcut需满足
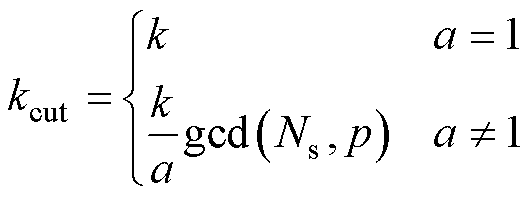 (2)
(2)
 (3)
(3)
式中,k为正整数;a为并联支路数。
式(2)表明,当a=1时,可切除任意数量的单元电机,而当a≠1时,应该尽可能选择多条支路并联,以获得更多的可选切除方案。式(3)表明,切除掉的单元电机个数不能超过所有单元电机个数的一半,否则将失去DR-PMSM的意义。由此可知,由于2极电机不能切除、4极电机只能切除一半,DR-PMSM更适用于6极及以上的整数槽绕组电机。进一步地,耦合角a的确定原则为
 (4)
(4)
综上所述,耦合角对于多极电机而言是不唯一的,极数越多,可选择的耦合角方案越多。对于确定的并行对驱设备而言,由于轴间距固定不变,当耦合角选取较大时,切除的单元电机数量多,为保证输出功率不变,叠片轴长较大;当耦合角选取较小时,为保证轴间距不变,定子铁心内径变小,同样使叠片轴长增大;当极数过多、耦合角更小时,会失去此类电机的意义。因此,确定耦合角时需要尤其考虑电机的极数和在空间尺寸上的限制。
由于两个单边传统电机的部分定子被切除,那么单边传统电机的额定功率和额定电压与耦合角a有关。定子切除前后,单边传统电机的体积变化了(360°-a)/360°,则功率也按照此比例关系变化。对于电压的变化,当并联支路数为1时,也按照此比例关系变化;当并联支路数不为1时,根据耦合角的选取原则,只能切除掉一条或多条支路,额定电压保持不变。因此,若DR-PMSM的额定功率为PN,额定电压为UN,且左右两套绕组并联,则切除前单边传统电机的额定功率PN1和额定电压UN1分别为
 (5)
(5)
 (6)
(6)
单边传统电机的主要尺寸公式为
 (7)
(7)
式中,D1为单边电机定子内径;lef为电枢有效长度;n为转速;ap为计算极弧系数;KNm为气隙磁场波形系数;Kdp为基波绕组系数;A为线负荷;Bd为气隙磁通密度峰值;hN为额定效率;cosjN为额定功率因数。
若左右两套绕组串联,则式(6)中的UN需要变为UN/2。由于两台传统电机并列放置,因此轴心距am需满足
 (8)
(8)
式中,D2为单边传统电机转子外径;d为气隙长度。
为了避免两台传统电机拼接后靠近耦合区处的槽重叠,槽深hs需满足
 (9)
(9)
在进行DR-PMSM初始设计时,可初取d=2d,此时式(9)可化简为
 (10)
(10)
通过选择合适的定子内径D1、电枢有效长度lef、气隙长度d等参数,即可确定单边传统电机的主要初始尺寸。
单边传统电机设计完成后,将两台传统电机进行拼接并填充定子铁心,形成DR-PMSM。由于耦合角a已经确定,因此可以进行优化的新增结构参数为占空角b和耦合间距d。理论上占空角b可以变化的范围为
 (11)
(11)
当占空角b=0时,表明DR-PMSM无占空区,耦合区内上下两个端部实现连体衔接;当占空角b为a时,表明单边电机无绕组分布的铁心端部较短,这不利于靠近端部绕组附近磁路的闭合。因此,建议占空角b初取为a/2。此外,为了严格保证式(8)的轴间距,在对d进行优化时需同时调整D2或D1和d,但d不宜过大,否则将失去DR-PMSM结构的优越性。综上所述,优化占空角b和耦合间距d时,需要注意其变化范围和条件,在可变区间之内,寻求b和d的最佳组合,以实现电机性能的提高。
虽然两套绕组可以根据需要同相串联或并联,然而,在设计单边传统电机时,按照电机的额定功率大小,绕组可能设计为单层或双层。当绕组为单层时,部分单元电机的切除不会影响电机整个绕组的排布。然而,当绕组为双层时,由于耦合区的存在,处于定子铁心端部槽内绕组线圈的上(下)层边将会无处嵌放。解决方法有三种:①在两个单边电机定子铁心端部各增加一个槽,此时两个单边电机的定子铁心端部槽内各含有一层绕组(与直线电机双层绕组结构类似);②将最后一个绕组线圈的上(下)层边嵌放在同侧电机第一个绕组线圈所在的槽内,此时这个线圈的端部会横跨耦合区;③将每一个单元电机的最后一个绕组线圈反向嵌放在此单元电机的第一个槽内,即大跨距线圈反向嵌放,此时每一个单元电机都完全独立。以绕组跨距为1槽为例,双层绕组三种嵌放方法的示意图如图6所示。需要注意的是,这三种方法都会使电机的三相绕组参数发生变化,设计时应注意其对电机性能的影响。
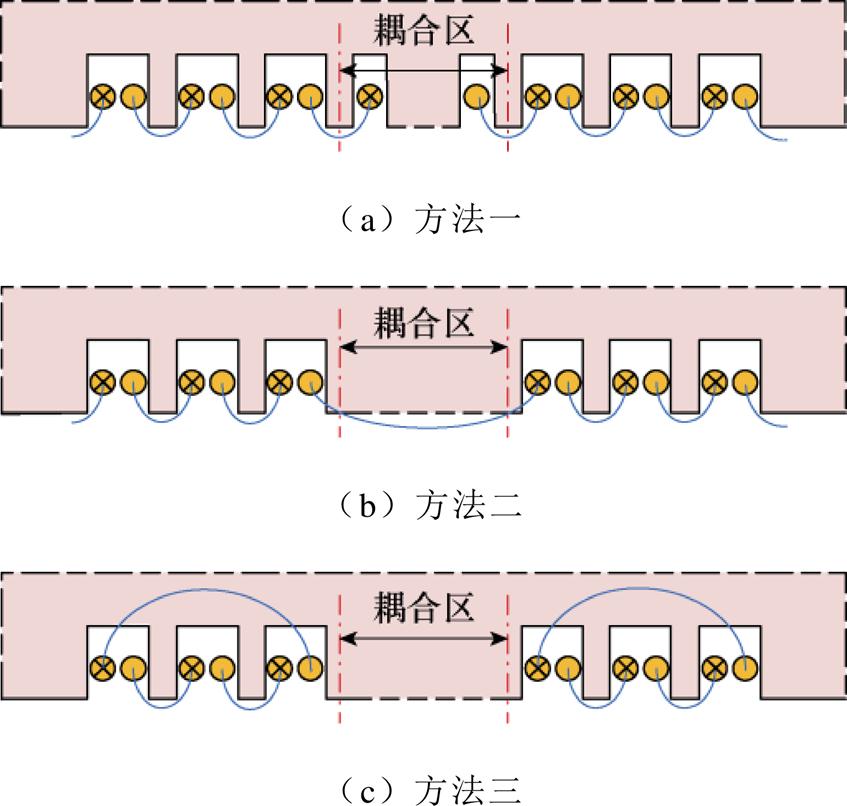
图6 双层绕组三种嵌线方式
Fig.6 Three methods for double-layer windings
以某一双螺杆泵为研究对象,其目前的驱动电机型号为Y160-8,功率为11 kW,两个螺杆之间距离为180 mm。按照上述方法设计一台DR-PMSM,其额定数据和结构参数见表2。建立DR-PMSM的有限元模型,并对其电磁性能进行分析。
图7为DR-PMSM不同转子位置时的磁通路径和磁通密度云图。由图7可知,两种转子位置下的磁通路径与1.2节中分析一致。且当转子处于不同位置时,非耦合区内的磁通密度分布相同,而耦合区内的磁通密度分布有较大不同。
图8为DR-PMSM单侧电机处于两种转子位置时沿转子圆周的径向气隙磁通密度。由图8可知,在非耦合区内,两种转子位置下的气隙磁通密度波形完全相同,受定子开槽影响,波形为带有丰富谐波的正弦波,每极磁通密度最大值为1.10 T,有效值为0.75 T;在耦合区内,当q=0时,气隙磁通密度最大值为1.35 T,当q=t/2时,气隙磁通密度最大值为1.15 T。
表2 DR-PMSM额定数据和结构参数
Tab.2 Rated data and structural parameters of DR-PMSM
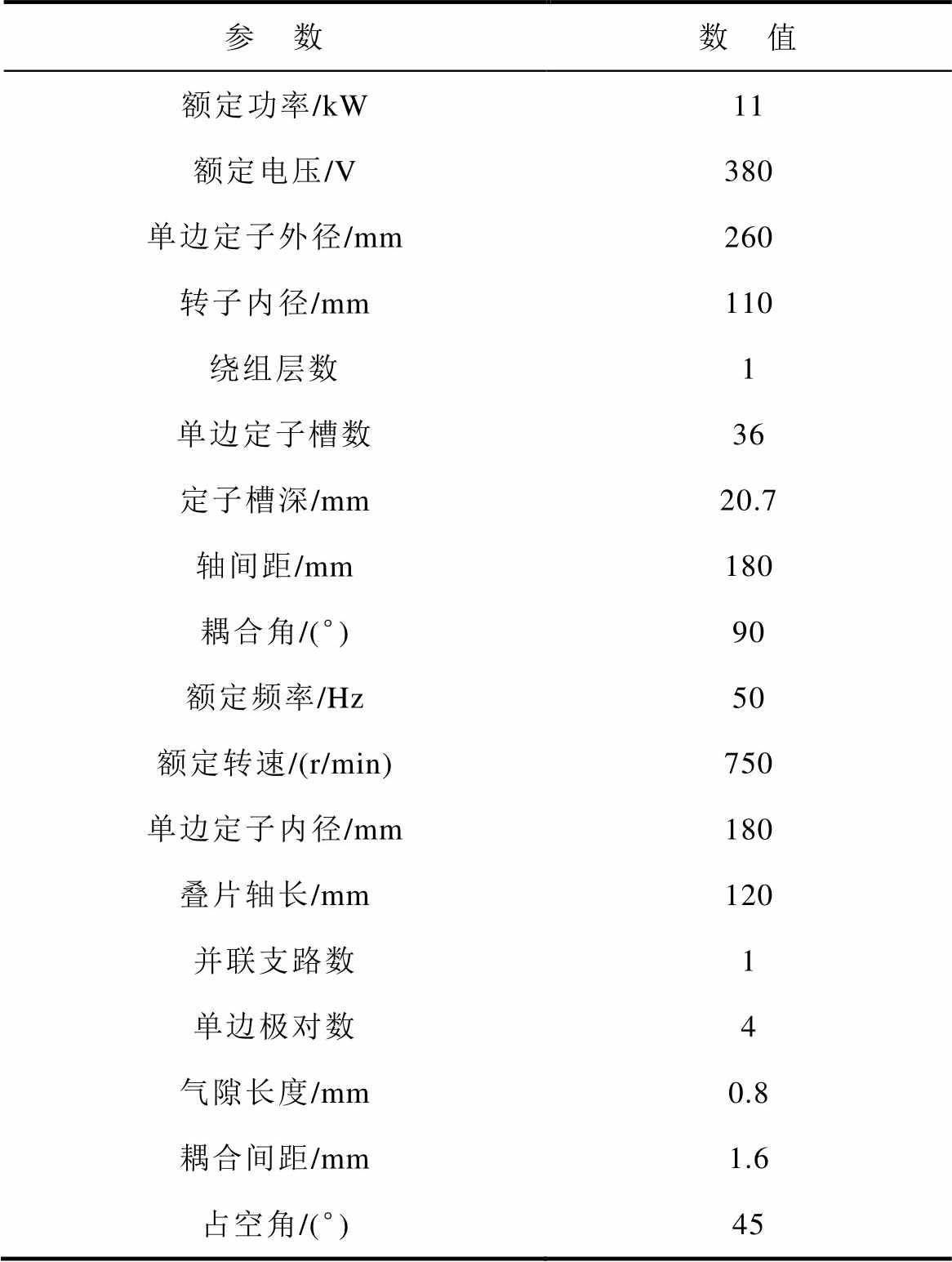
参 数数 值 额定功率/kW11 额定电压/V380 单边定子外径/mm260 转子内径/mm110 绕组层数1 单边定子槽数36 定子槽深/mm20.7 轴间距/mm180 耦合角/(°)90 额定频率/Hz50 额定转速/(r/min)750 单边定子内径/mm180 叠片轴长/mm120 并联支路数1 单边极对数4 气隙长度/mm0.8 耦合间距/mm1.6 占空角/(°)45
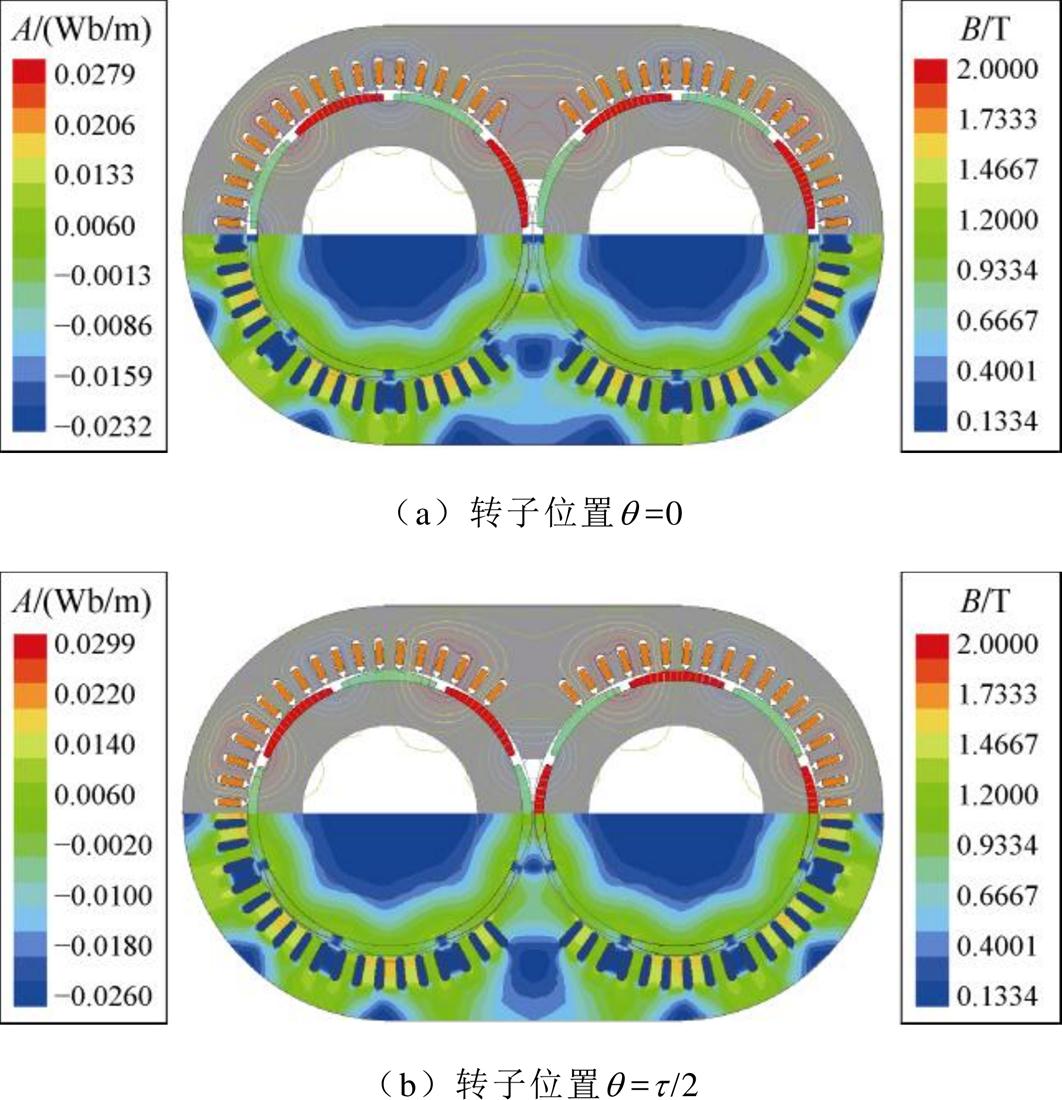
图7 DR-PMSM的磁场分布
Fig.7 Magnetic field distributions of DR-PMSM
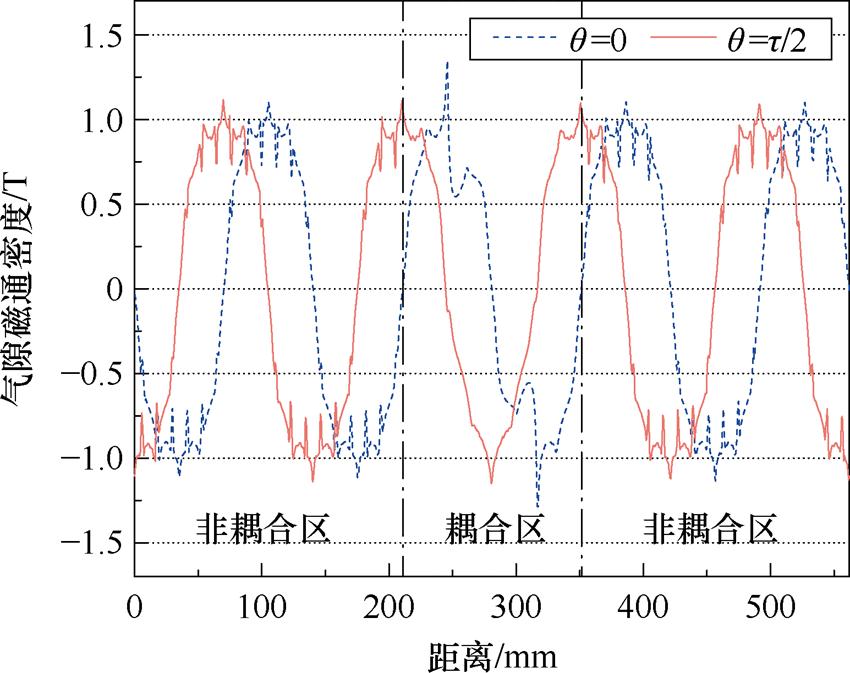
图8 DR-PMSM的气隙磁通密度
Fig.8 Air-gap flux density of DR-PMSM
设DR-PMSM左侧电机三相绕组分别为A相、B相、C相,右侧电机三相绕组分别为U相、V相、W相。由于DR-PMSM结构具有对称性,以A相、B相、C相为对象进行分析。图9为电机空载时三相永磁磁链,由图9可知,A相、B相、C相三相永磁磁链相位差为120°,A相和B相永磁磁链幅值相等,为0.932 Wb,而C相永磁磁链幅值较高,为0.946 Wb。
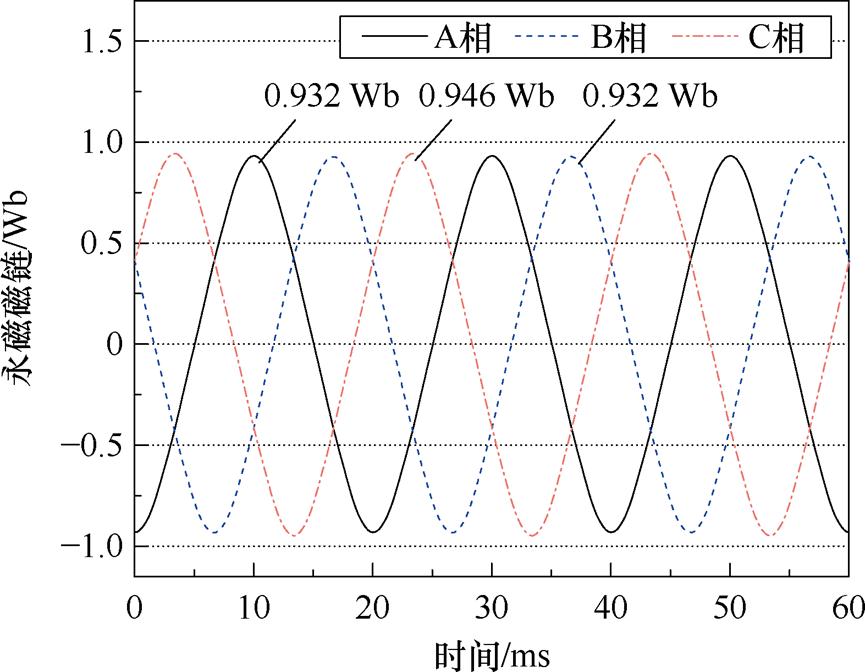
图9 DR-PMSM的永磁磁链
Fig.9 PM flux-linkage of DR-PMSM
图10为电机三相空载反电动势波形及谐波分析,由图10a可知,A相、B相、C相三相空载反电动势相位差也为120°,A相和B相空载反电动势有效值相等,为200.5 V,而C相空载反电动势有效值较高,为202.6 V。由图10b可知,反电动势中基波幅值最大,为284 V,占比83.3%,3次谐波幅值较大,为37.2 V,占比10.9%。此外,反电动势中还包含较少的5次、9次、11次等谐波。
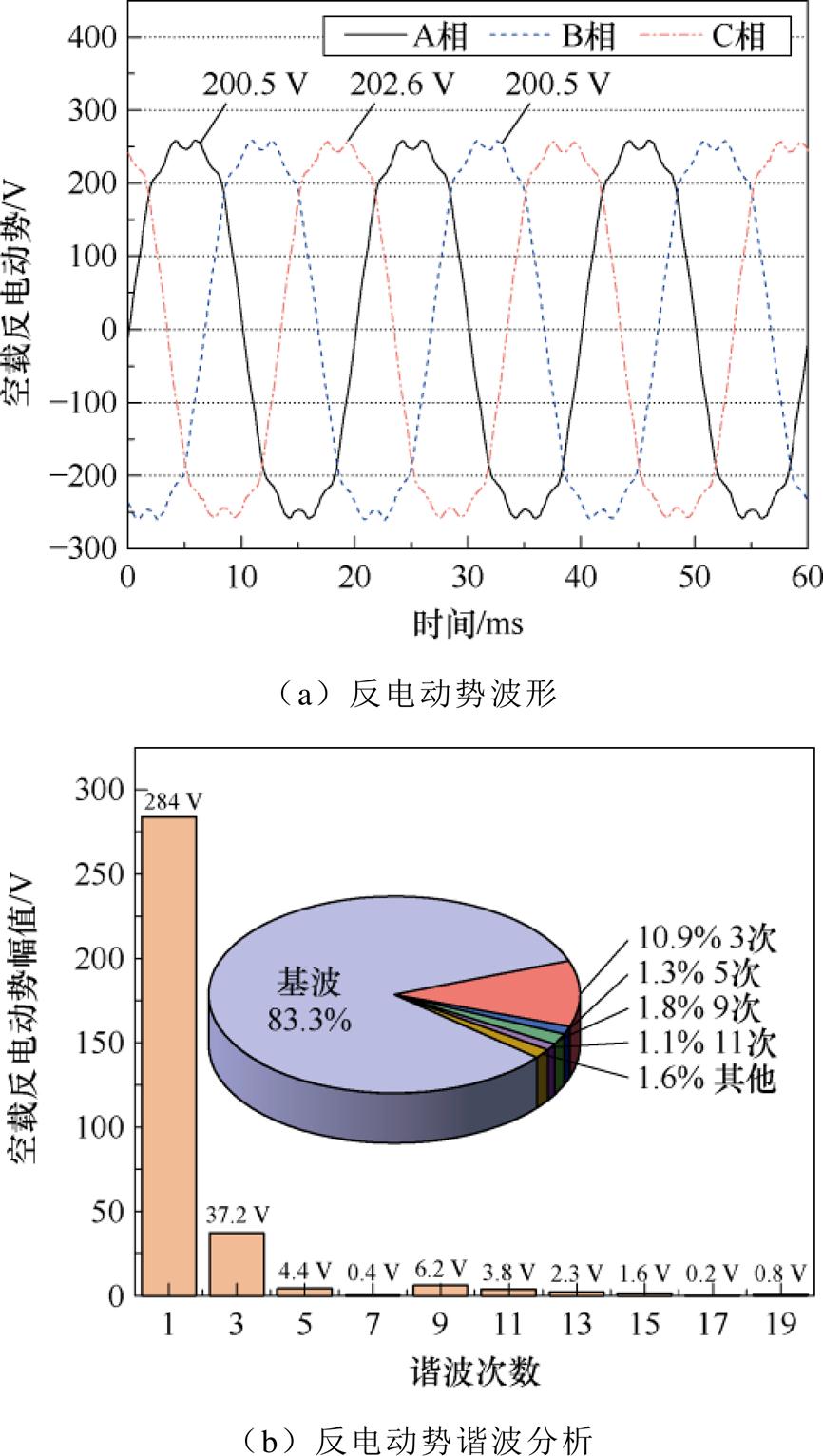
图10 DR-PMSM的空载反电动势
Fig.10 No-load back electromotive force of DR-PMSM
DR-PMSM三相永磁磁链和三相空载反电动势存在不对称现象,二者都是因耦合区磁路的存在而引起。进一步地,分析耦合区磁路对三相空载反电动势的影响程度。建立主从边界条件的单元电机有限元模型,如图11所示,该模型能够去除耦合区磁路的影响。
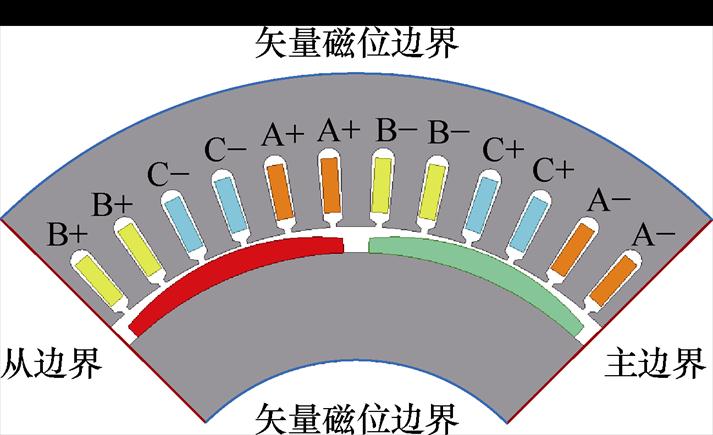
图11 单元电机有限元模型
Fig.11 Finite element model of one unit motor
三个单元电机的总空载反电动势如图12所示。由图12可知,三相空载反电动势相位互差120°,有效值相等,均为202.8 V,不存在不对称现象。图10与图12相比,由于耦合区的存在,A相绕组和B相绕组的空载反电动势有效值降低了2.3 V,C相绕组的空载反电动势有效值基本不变。这是因为A相绕组线圈和B相绕组线圈靠近耦合区,处于定子端部,受耦合区磁路影响较大,二者匝链的磁通均小于离耦合区较远的C相绕组线圈匝链的磁通,故C相反电动势有效值更大。
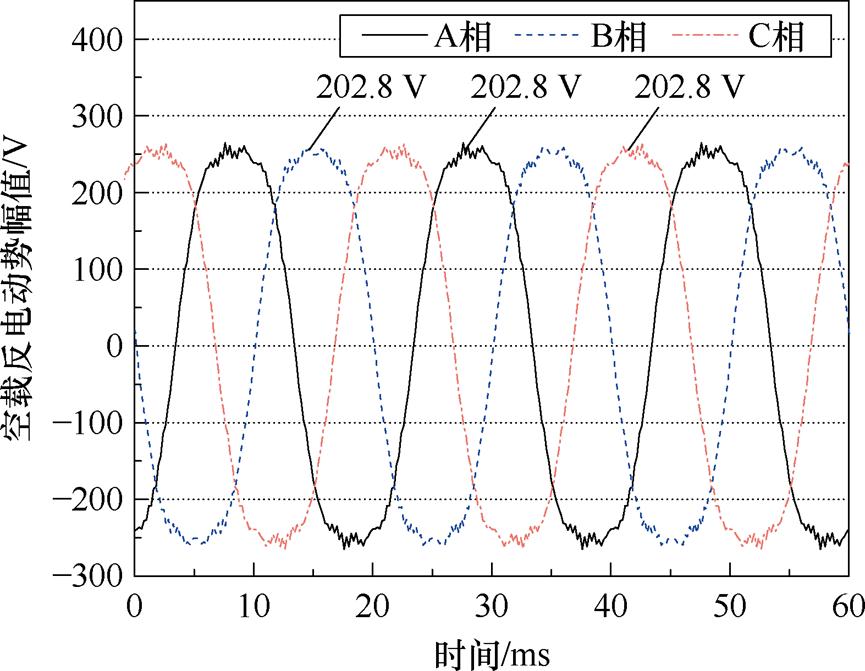
图12 三个单元电机的空载反电动势
Fig.12 No-load back electromotive force of three unit motors
由于DR-PMSM左右两侧电机的绕组不连续,且左右侧电机存在磁路耦合,影响了各相绕组的电感参数。DR-PMSM的电感参数见表3。由表3可知,各相绕组自感相同,均为9.46 mH,靠近端部单元电机的A相、B相、U相、V相绕组自感值并没有受到磁路4的影响,原因是磁路4的磁通占比较小,且电感值是多个单元电机对应相的串联,使得磁路4对端部绕组的自感值的影响效果不明显。同侧电机的互感不对称,A(U)相绕组、C(W)相绕组之间的互感与B(V)相绕组、C(W)相绕组之间的互感相同,为-3.18 mH,且均大于A(U)相绕组与B(V)相绕组之间的互感-0.78 mH,原因是同侧电机处于端部的两个单元电机A(U)相绕组线圈和B(V)相绕组线圈在空间上距离较远,因此A(U)相绕组和B(V)相绕组之间互感较小。
表3 DR-PMSM的电感参数
Tab.3 Inductance parameters of DR-PMSM (单位: mH)
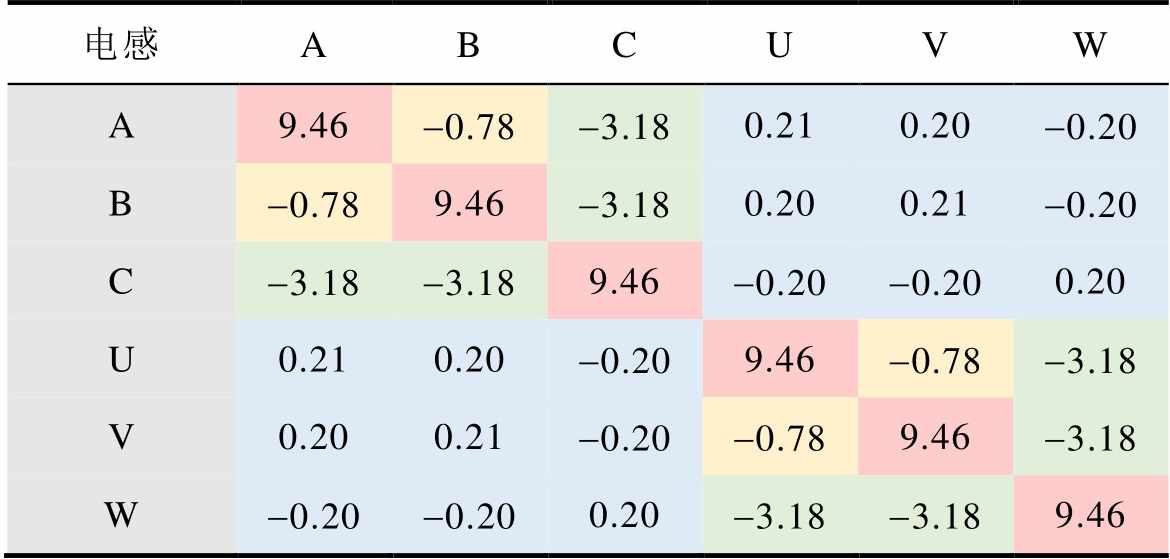
电感ABCUVW A9.46-0.78-3.180.210.20-0.20 B-0.789.46-3.180.200.21-0.20 C-3.18-3.189.46-0.20-0.200.20 U0.210.20-0.209.46-0.78-3.18 V0.200.21-0.20-0.789.46-3.18 W-0.20-0.200.20-3.18-3.189.46
此外,受磁路5的影响,两侧电机绕组之间也存在互感,即A相、B相、C相与U相、V相、W相绕组之间存在互感,互感值较小。由于同侧电机处于端部的单元电机A(U)相、B(V)相绕组在空间上与另一侧电机的三相绕组相距较近,而C(W)相与另一侧电机的三相绕组较远,因此同侧电机的A(U)相、B(V)相与另一侧三相绕组之间的互感和C(W)相与另一侧电机三相绕组之间的互感也不对称。
通过上述分析可知,对于DR-PMSM,由于耦合区的存在使定子出现了两个端部,绕组的电感参数不再对称,具体表现为单侧电机两相绕组的电感参数在空间上对称,且不同于另一相绕组。
DR-PMSM的空载转矩及谐波分析如图13所示。左右侧两个转子空载转矩波形相同,空载转矩峰峰值为15.5 N·m。以一对磁极为周期,对其进行傅里叶分解,结果表明,空载转矩中含有丰富的偶次谐波,其中2次谐波幅值最大,4次、6次、10次谐波幅值较大。分析空载转矩的组成可知,DR-PMSM的空载转矩T0含三个分量,分别为因齿槽效应引起的齿槽转矩Tcog、因定子铁心开断引起的端部效应力矩Tend、因永磁转子并列安置引起的永磁齿轮传递转矩Tgear。其中,Tend、Tgear均以一对极为周期,增加了空载转矩中的偶次谐波,尤其以2次谐波为重。
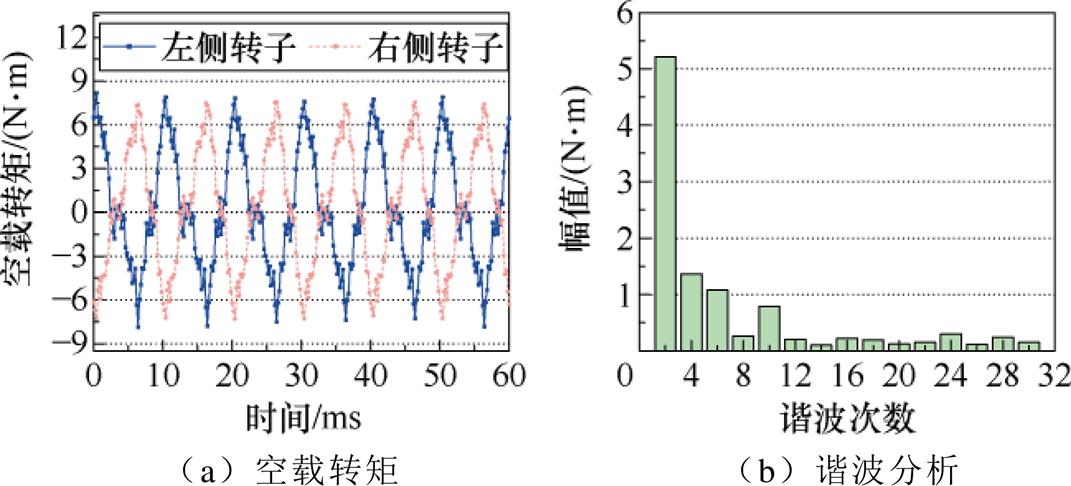
图13 空载转矩波形及谐波分析
Fig.13 Waveform and harmonic of no-load torque
为了分析DR-PMSM特殊的耦合区结构对空载转矩的影响,建立DR-PMSM的无槽有限元模型,如图14所示,该模型能够将Tcog分离出去,进而得到由耦合区结构引起的Tend+Tgear。图15为Tend+Tgear的波形及谐波分析,由图15可知,Tend+Tgear的峰峰值为13.8 N·m,对其进行傅里叶分解可得,Tend+Tgear中也是2次谐波幅值最大,4次、6次、10次谐波幅值较大。将有槽有限元模型计算得到的各次谐波幅值和无槽有限元模型计算得到的各次谐波幅值整理见表4。
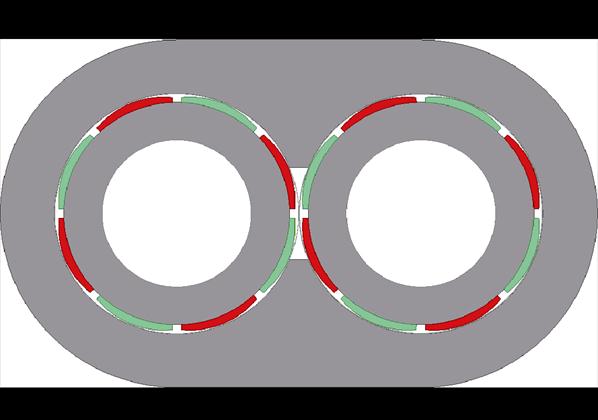
图14 DR-PMSM的无槽有限元模型
Fig.14 Slot-less finite element model of DR-PMSM
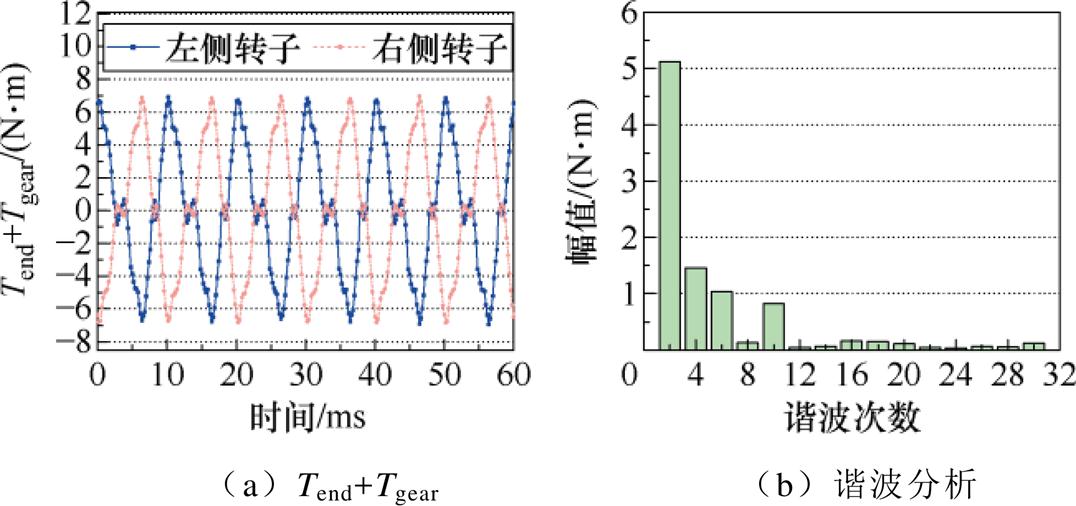
图15 Tend+Tgear波形及谐波分析
Fig.15 Waveforms and harmonic of Tend+Tgear
表4 有槽模型和无槽模型中各次谐波幅值
Tab.4 Harmonic in slotted model and slot-less model (单位: N·m)
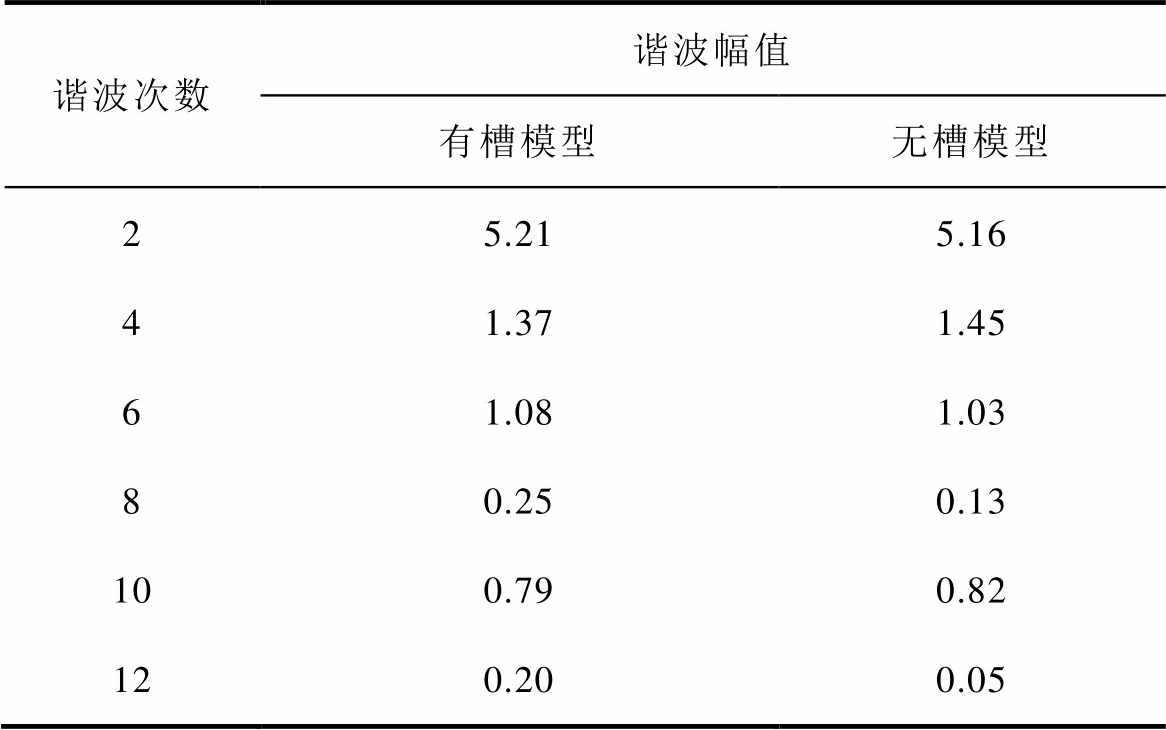
谐波次数谐波幅值 有槽模型无槽模型 25.215.16 41.371.45 61.081.03 80.250.13 100.790.82 120.200.05
由表4可知,在有槽模型与无槽模型中,占比较大的2次、4次、6次、10次谐波幅值几近相同,这表明,当单边传统电机优化完成后,DR-PMSM空载转矩中Tend+Tgear是最主要的成分,Tcog对空载转矩的影响较小。
给电机施加三相对称额定电流,计算得到的DR-PMSM负载转矩如图16所示。由图16可知,左右两侧转子输出的负载转矩波形相同,平均值为71 N·m,能够实现并行对驱类设备的反向同步旋转。负载转矩中的2次谐波仍然占比最大,转矩脉动较大,其值为16.1 N·m。与空载转矩的15.5 N·m相比可知,DR-PMSM的转矩脉动主要来自于空载转矩,因绕组参数(尤其是电感参数)不对称引起的纹波转矩对转矩脉动的影响并不明显。
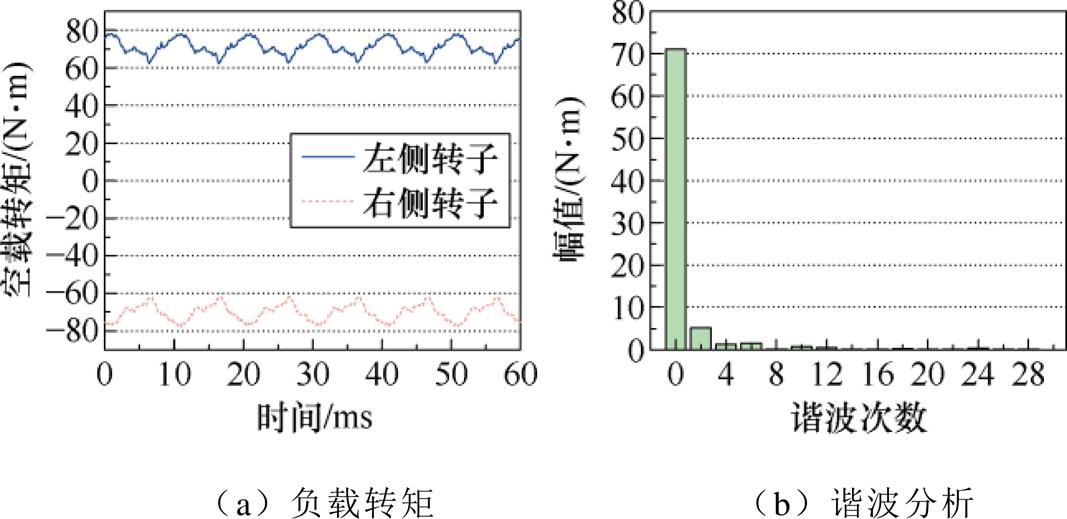
图16 负载转矩波形及谐波分析
Fig.16 Waveforms and harmonic of load torque
当电机定子完整时,转子所受的电磁力沿整个圆周对称分布,合力为0,电磁力平衡。但对于DR- PMSM来说,由于单边传统电机部分定子的缺失,定子不再沿圆周完整分布,使得转子所受的电磁力不平衡。DR-PMSM左侧转子所受的空载电磁力如图17所示。在图17中,X方向电磁力和Y方向电磁力的正负号分别代表各自的方向,X方向向右为正,Y方向向上为正。由于合力方向是X方向电磁力和Y方向电磁力的矢量和,其方向在不断变化,因此,图17中合力仅能代表合力大小的变化,不能表示方向的变化,每一时刻合力的方向需要结合两个方向上电磁力的正负判断。
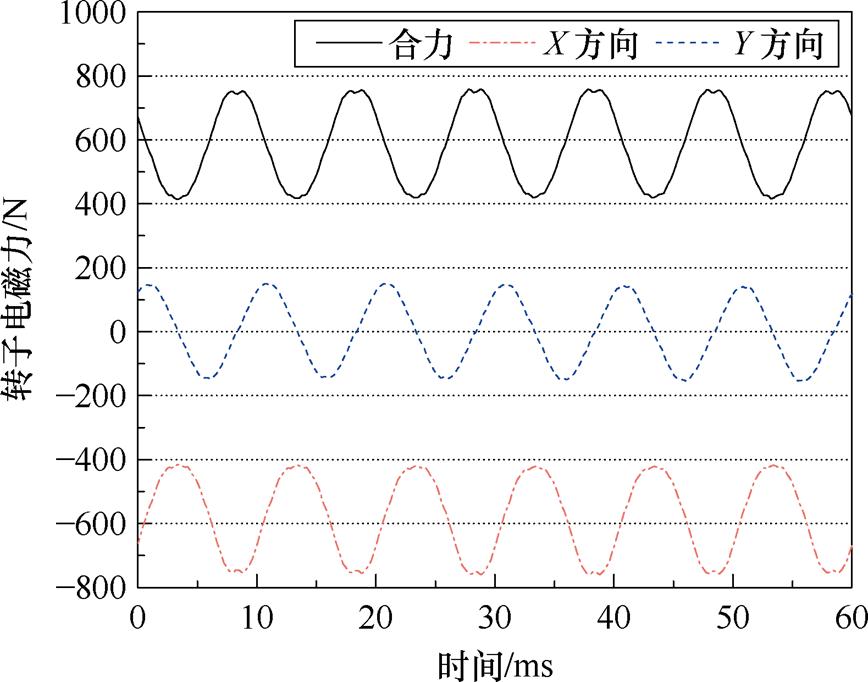
图17 DR-PMSM转子所受空载电磁力
Fig.17 No-load electromagnetic force on the rotor of DR-PMSM
由图17可知,当电机空载运行时,转子所受的电磁力以一个磁极为周期波动。X方向电磁力平均值为576.8 N,方向向左,Y方向电磁力平均值为0,方向在向上和向下之间波动,合力平均值为583.3 N,方向在左上方和左下方之间交替变化。X方向电磁力与合力数值不完全相同的原因是X方向电磁力与Y方向电磁力满足矢量相加。右侧转子所受空载电磁力情况与左侧转子类似,仅是方向不同。
通过以上分析可知,对于左侧转子,当电机空载时,因定子缺失使其所受的电磁力方向向左,即使耦合区内两个转子之间的永磁体存在磁力,但并不足以抵消这一不平衡的电磁力,且由于耦合区结构对称,非耦合区转子所受的电磁力均为径向,因此转子Y方向所受的电磁力平均值为0。同时,可以推断,当电机负载时,转子存在切向分量的电磁力(用于产生负载转矩),这使得转子Y方向所受的电磁力平均值不再为0。
电机的效率为输出功率与输入功率的比,输入功率为输出功率与总损耗的和。经过有限元计算,本文所设计的DR-PMSM铜损耗为148.66 W,铁损为94.14 W,其中磁滞损耗为68.17 W,涡流损耗为25.97 W。将机械损耗和杂散损耗估计为输出功率的1%。最终计算得到,DR-PMSM的效率约为96.89%。
DR-PMSM占空角b和耦合间距d直接决定了耦合区的磁路,是两个重要的关键参数。对于此类结构的电机,低转矩脉动和低转子不平衡电磁力是两个关键性能。因此,探究关键参数对关键性能的影响规律,有利于指导DR-PMSM更优的电磁设计。需要说明的是,正如2.2节所述,为了保持轴间距am不变,当对耦合间距d进行优化时需同时调整转子外径D2。然而,为了更好地控制变量,本节研究并没有调整D2,仅是为了分析d对关键性能的影响规律。
控制耦合间距不变,图18给出了占空角对关键性能的影响。由图18可知,随着占空角的增加,转矩脉动与转子所受电磁力整体上均呈增加趋势。在转矩脉动增加的过程中出现了两次极值,极大值出现在占空角为24°时,极小值出现在占空角为30°时;在转子电磁力增加的过程中出现了一次极小值,出现在占空角为20°时。
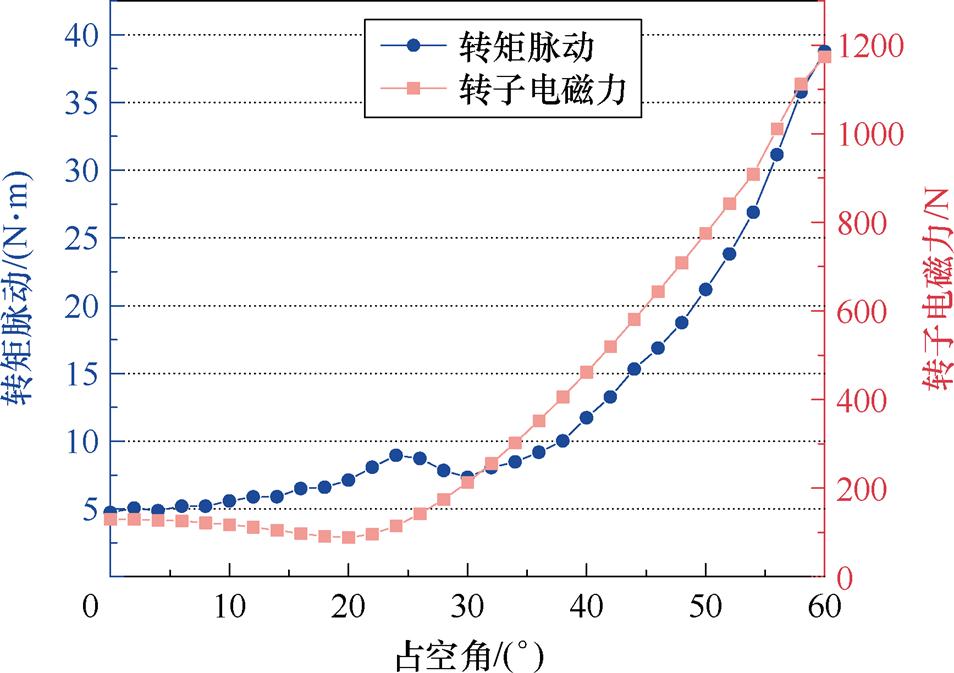
图18 占空角对关键性能的影响
Fig.18 The influence of the duty angle on key performance
分析上述现象产生的原因,当占空角较小时,定子铁心端部截面很小,此时由端部效应引起的转矩脉动几乎可以忽略不计,永磁齿轮传递转矩占主要成分。随着占空角的增加,端部效应愈发明显,当占空角增加到一定程度时,根据直线电机理论,端部长度的合适选择能够降低端部效应带来的转矩脉动,因此,转矩脉动在上升过程中出现了一次极小值。当占空角较大时,端部截面很大,且靠近端部截面的两侧永磁体之间的耦合程度减弱,此时端部效应力矩占主要成分。
同时,占空角增加意味着单侧电机定子铁心缺失的越多,转子所受的电磁力越不平衡,即使两侧转子永磁体之间存在磁力,但由于距离较远、磁力有限并不足以抵消这种不平衡。此外,当占空角较小时,靠近耦合区中心位置的铁心对转子电磁力的平衡效果有限,因此永磁体刚暴露在占空区时会抵消一部分不平衡电磁力,转子电磁力增加的过程中出现了一次极小值。综上所述,较小的占空角可以同时降低转矩脉动和转子电磁力。
控制占空角不变,图19给出了耦合间距对关键性能的影响。由图19可知,随着耦合间距的增加,转矩脉动整体呈下降趋势,在下降的过程中存在波动。转子所受电磁力呈严格单调递增趋势。
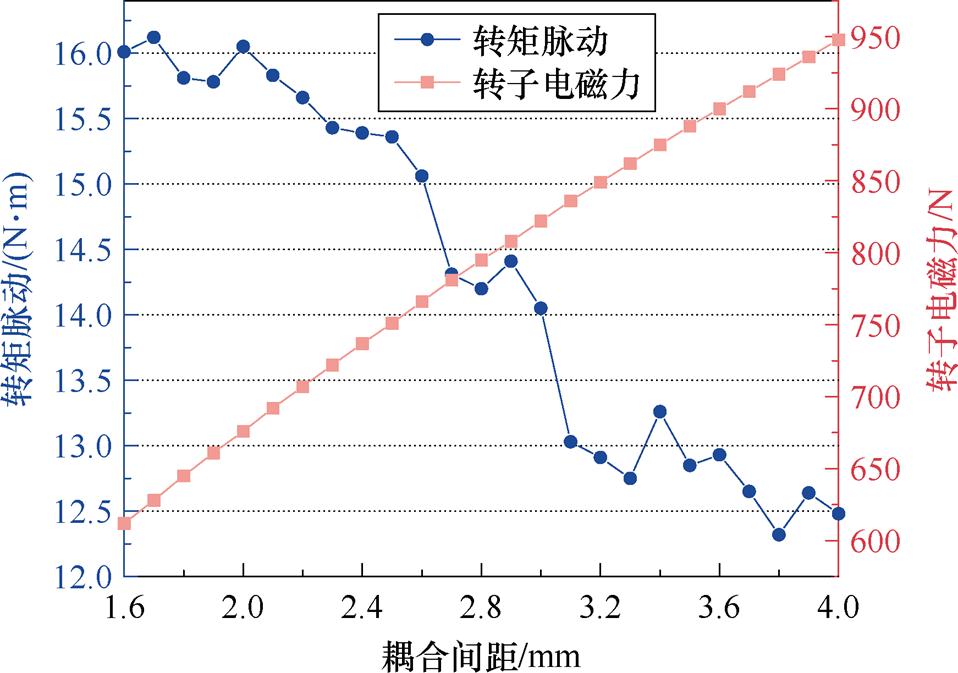
图19 耦合间距对关键性能的影响
Fig.19 The influence of the coupling distance on key performance
分析二者变化趋势产生的原因,随着耦合间距的增加,两侧转子之间距离变大,永磁齿轮传递转矩减小,这使转矩脉动随着耦合间距的增加整体呈现出下降的趋势。然而,耦合间距的增加意味着铁心端部截面面积变大,使端部效应更加明显,此外,靠近端部边缘两侧永磁体之间的耦合程度也在变化,因此,转矩脉动在下降的过程中出现了波动。
同时,由于两侧永磁转子的距离越来越远,两侧永磁体之间的磁力越来越小,这使转子所受的电磁力越来越不平衡。综上所述,转矩脉动与转子电磁力随耦合间距增加所呈现的变化规律相反,设计时应根据实际情况进行合理选择。
按照第2节所提出的DR-PMSM的设计方法,研制一台DR-PMSM。为了使电机的转矩脉动和转子电磁力较小,根据第4节的分析,将样机的占空角选为16°,同时永磁磁极采用不等厚磁极结构,其他设计参数与表2相同。考虑到加工方便,实际研制出的原理样机中某些机械结构与图2a稍有不同,但其电磁结构完全相同。所研制的原理样机如图20所示。
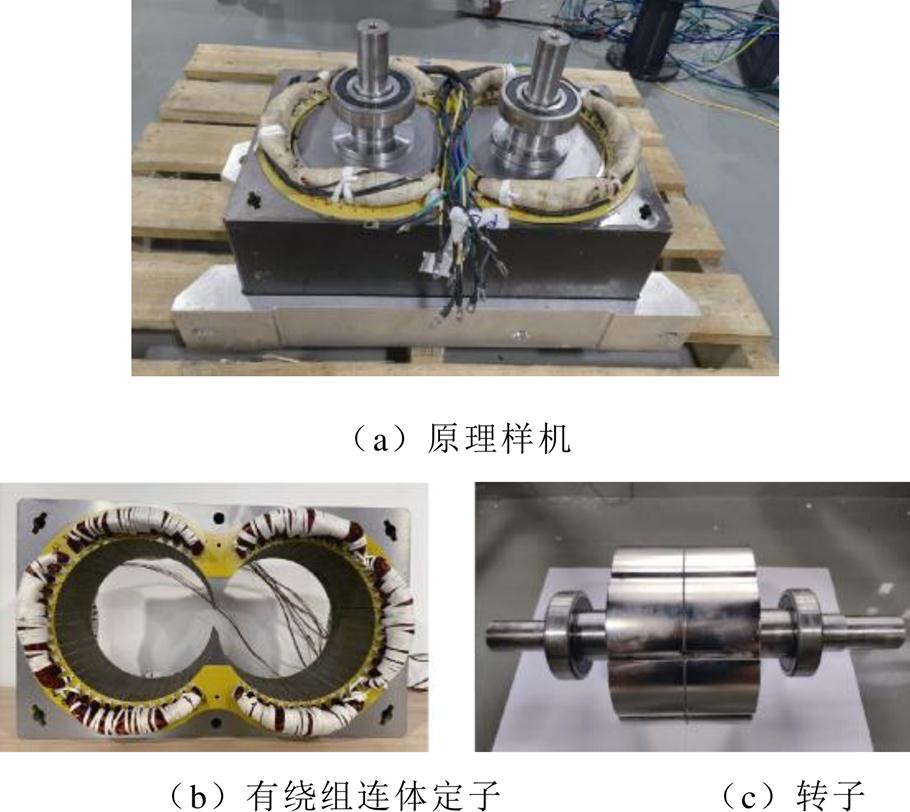
图20 DR-PMSM样机实物
Fig.20 DR-PMSM prototype
将DR-PMSM的左侧绕组和右侧绕组同相并联,引出的三相分别为A1相、B1相和C1相。采用LCR数字电桥测试仪测量电机的三相电阻参数和三相电感参数,多次测量取平均值,测量结果见表5。表5中,自感仿真值为表3中自感仿真值的一半,这是因为表5中的仿真值将左右两侧绕组的同相进行了并联,以便于与测试值进行对比。
由表5可知,三相电阻分别为0.49、0.50、0.47 W,受绕线工艺限制,三者存在差异,但近似相同。与仿真0.44 W相比,测试值较大,这是由于测试环境温度与仿真温度不同所导致。三相绕组自感分别为4.42、4.45、4.44 mH,较为对称。与仿真4.73 mH相比,测试值较小,这是由于有限元仿真时未考虑到绕组的漏磁。
表5 DR-PMSM的电阻和电感
Tab.5 Resistance and inductance of DR-PMSM
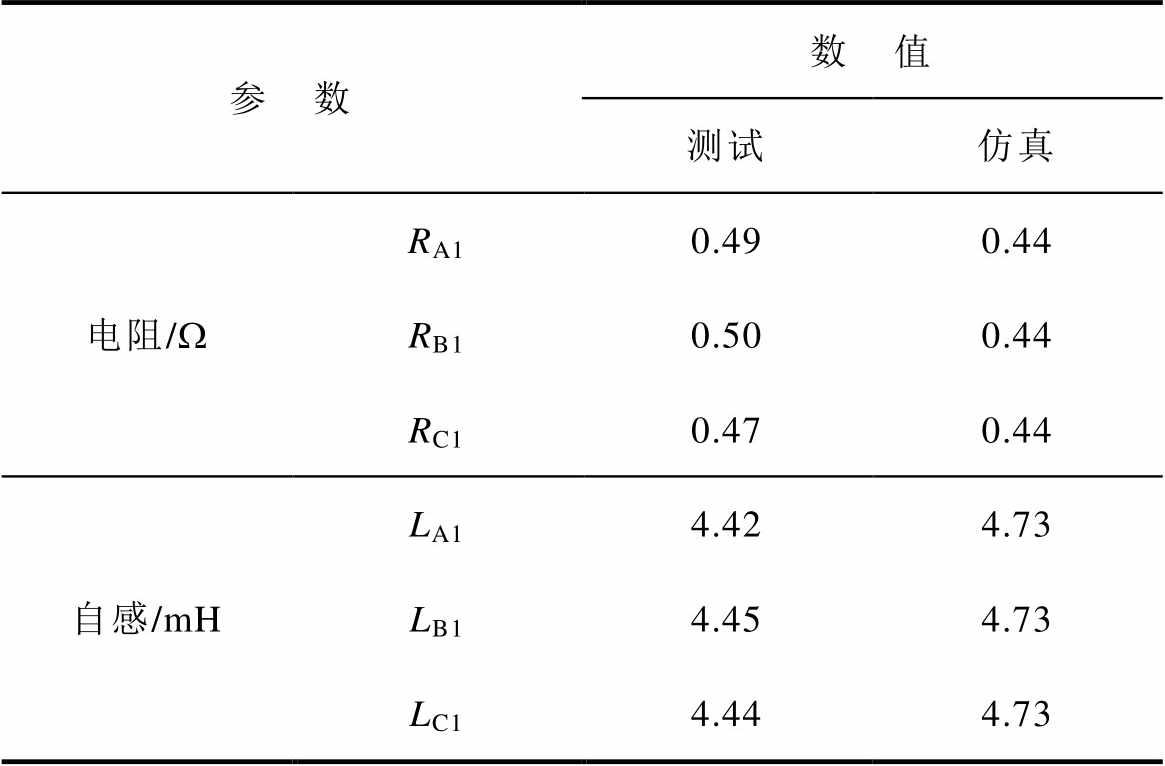
参 数数 值 测试仿真 电阻/WRA10.490.44 RB10.500.44 RC10.470.44 自感/mHLA14.424.73 LB14.454.73 LC14.444.73
当左侧转子和右侧转子磁极正对时,用记号笔在转轴上画线,标记转轴的相对位置,采用原动机(电动扳手)带动其中一个转子旋转,同时用示波器采集A相和U相的空载反电动势。测试平台如图21所示,绕组均不通电。在测试过程中发现,当原动机带动其中一个转子旋转时,另一个转子也随之旋转,此时能够直观地看出,两个转轴上的记号线同步旋转,基本无偏移。
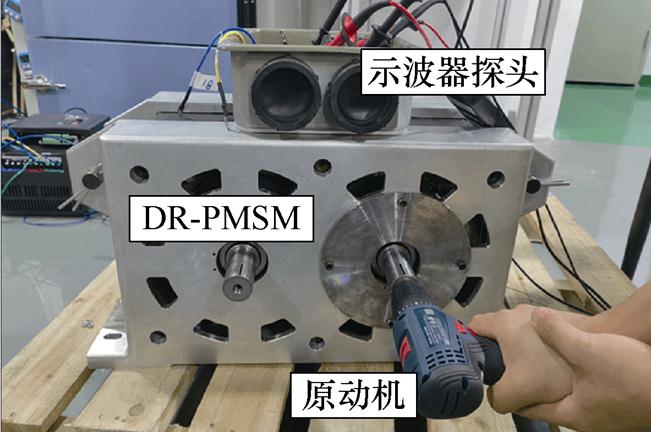
图21 DR-PMSM同步性测试平台
Fig.21 Synchronicity test platform of DR-PMSM
A相和U相的反电动势波形如图22所示,红色波形为A相,蓝色波形为U相。为了使显示更清晰,将两相的横坐标零点进行了偏置。由图22可知,二者相位和周期相同,有效值分别为47.02 V和46.49 V,数据误差相差约1.1%,这是由于加工误差或测试误差造成的,可认为近似相等。以上测试现象及结果表明,因耦合区的存在,两个转子之间的相互作用使DR-PMSM具有很好的旋转同步性,这对于驱动并行对驱类负载而言具有极大优势。
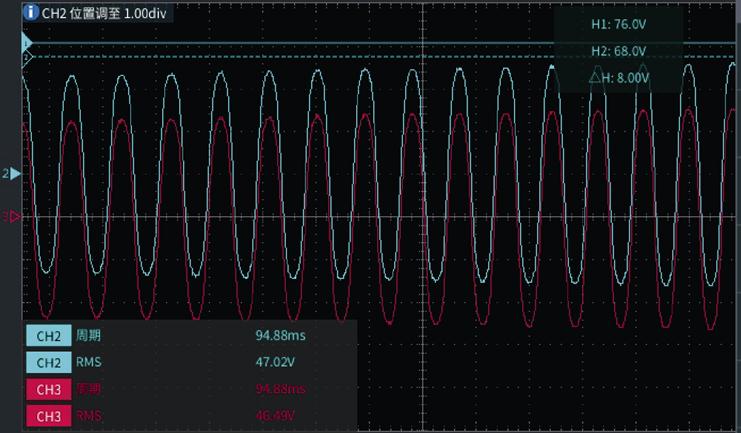
图22 A相和U相的反电动势试验波形
Fig.22 Experimental waveforms of back electromotive force in phase A and phase U
仍采用电动扳手作为原动机拖动电机旋转,速度为280 r/min,示波器记录电机的三相空载反电动势。测试结果和有限元仿真结果如图23所示。由图23b可知,样机所测得的空载反电动势三相基本对称,且具有较高的正弦度,其中,A1相的空载反电动势有效值为76.33 V。与图23a中的三相反电动势仿真结果比较,二者波形具有较好的吻合度。仿真中A1相的空载反电动势有效值为77.35 V,与测试值相差1.34%,这主要是由加工误差和测试误差造成的。
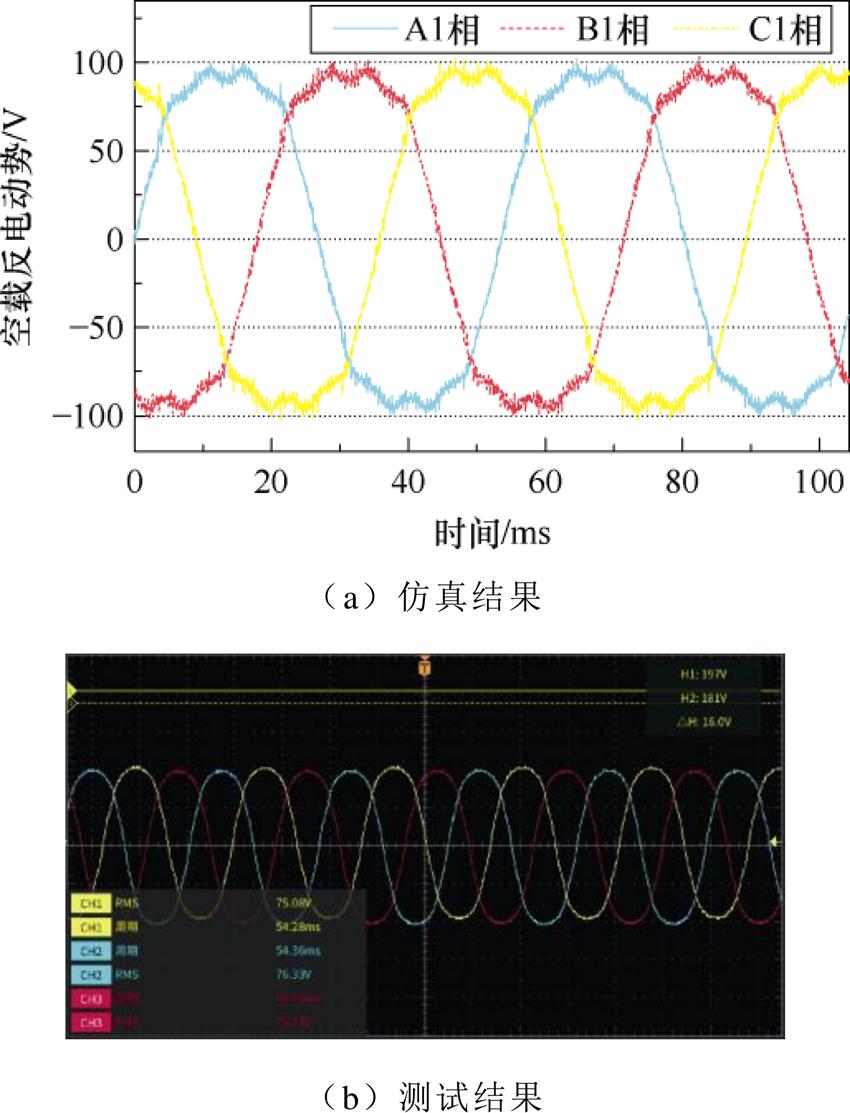
图23 DR-PMSM空载反电动势
Fig.23 No-load back electromotive force of DR-PMSM
为了定量衡量加工误差和测试误差,将仿真与测试得到的三相空载反电动势有效值对比总结见表6。由表6可以看出,仿真与测试得到的三相空载反电动势有效值有较小不同,但它们之间每一相的偏差较为一致,均在1.39%附近。因此,通过测试值与仿真值的比值,可以引入修正系数来反映加工误差和测试误差。在本试验中,修正系数为0.986。
表6 三相空载反电动势有效值仿真与测试的比较
Tab.6 Comparison between simulation and test of three-phase no-load back electromotive force
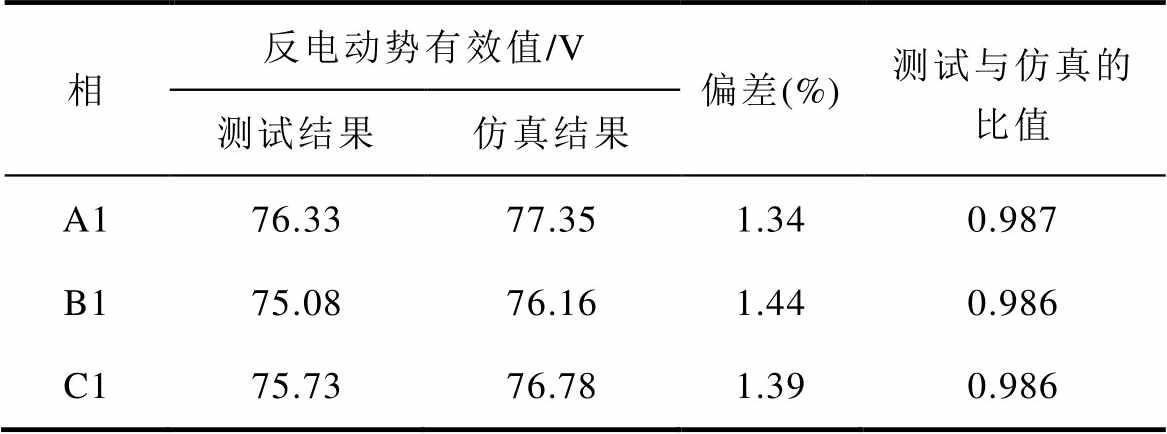
相反电动势有效值/V偏差(%)测试与仿真的比值 测试结果仿真结果 A176.3377.351.340.987 B175.0876.161.440.986 C175.7376.781.390.986
负载性能测试平台如图24所示。为了测量方便,采用同步机械齿轮将两个转轴输出的功率传递到一个轴上,使用磁粉制动器给DR-PMSM施加负载,通过动态转矩传感器记录转轴输出转矩、功率和转速,并使用电流钳记录电流。
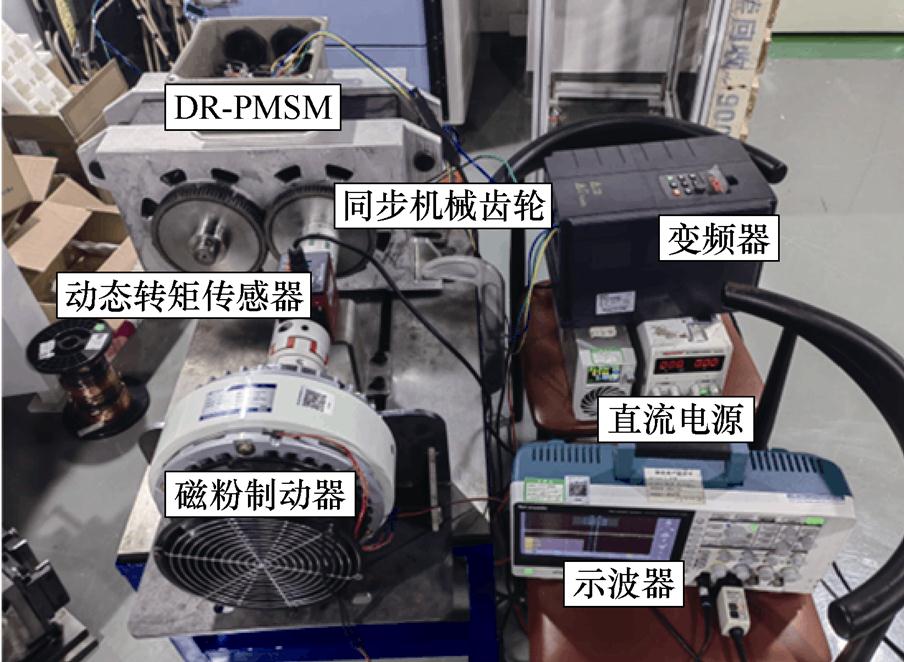
图24 负载性能测试平台
Fig.24 Load performance test platform
通过变频器起动电机至额定转速750 r/min,即电源频率设定为50 Hz。逐渐施加负载,记录输出转矩和相应的电流,绘制了如图25所示的关系曲线。由图25可知,电机的输出转矩和输入电流呈线性关系,当输入电流为19 A时,输出转矩基本能够达到140 N·m,说明该电机能够驱动额定负载。
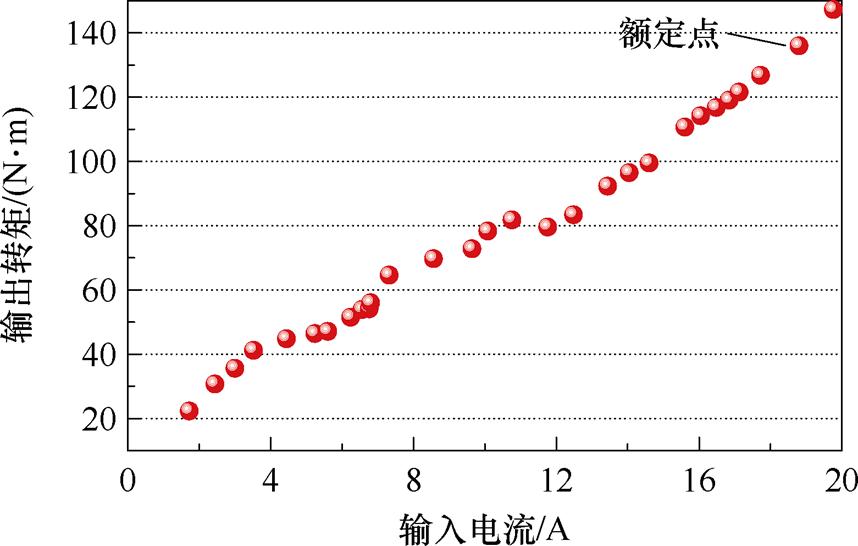
图25 输出转矩与输入电流之间的关系
Fig.25 The relationship between the output torque and the input current
图26为额定负载条件下负载转矩的测试和仿真波形,测试波形的数据采集点由动态转矩传感器记录的离散点得到,并取其值的一半。由图26可以看出,仿真得到的平均转矩与试验得到的平均转矩相同,均在70 N·m附近波动,两种波形的波动规律大致相同。然而,转矩波形并不完全重合,原因是负载测试中采用了同步机械齿轮将双轴的负载传递到一个轴上,带来了测试误差。试验得到的转矩脉动相对较小,这是因为同步机械齿轮抵消了一部分由耦合区带来的磁阻转矩及传递转矩。
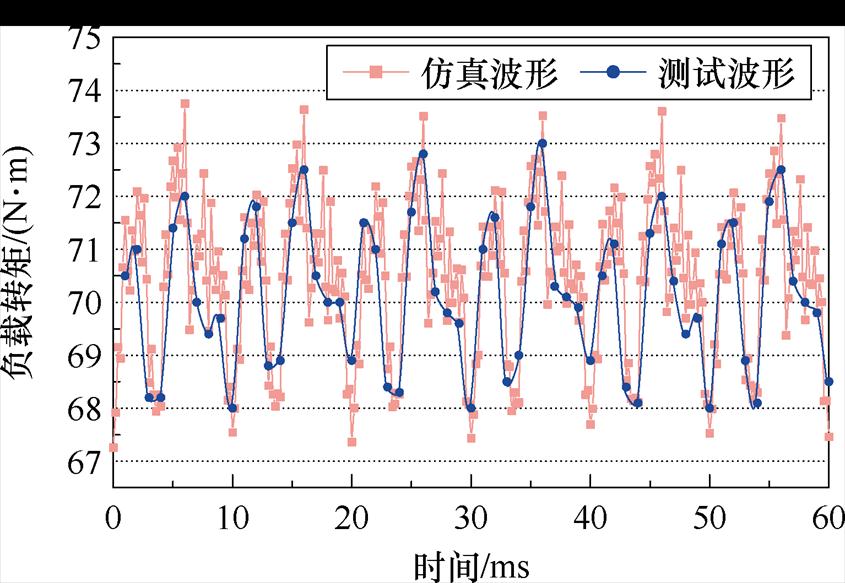
图26 负载转矩的仿真波形与试验波形
Fig.26 Simulation waveform and test waveform of load torque
转子不平衡力的测试系统如图27所示,在其中一侧转子的前后两个轴承套内分别安装两个正交的力传感器,分别测量X方向和Y方向的电磁力。由于任何微小的力矩变化都会影响测量结果,在测试中应将同步机械齿轮卸下。用两只手尽可能地匀速转动两个转子,观察测力计示数的变化。结果表明,X方向的力在40 N附近波动变化;Y方向的力基本不变,为转子重力。需要说明的是,由于转子运动会导致测得的力不准确,此部分仅是为了说明DR- PMSM存在转子不平衡电磁力的现象。
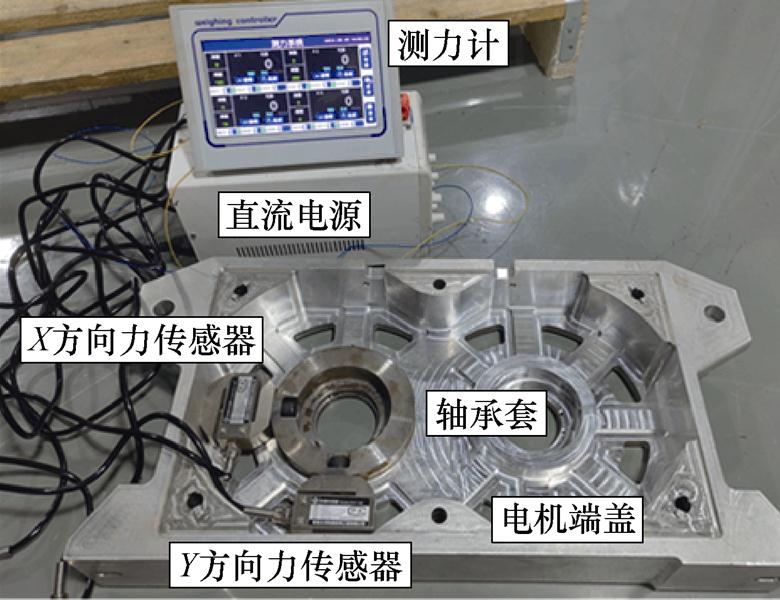
图27 测力系统
Fig.27 Force measuring system
本文提出了一种用于驱动并行对驱机械设备的新型DR-PMSM,研究了此类电机的设计方法,分析了电磁特性,并进行了相关的试验,得到的主要结论如下:
1)DR-PMSM设计流程共分为前期准备、单边传统电机设计及优化、双并列转子电机设计及优化三个部分,每部分对应一个关键设计环节,分别为耦合角的确定、单边传统电机主要尺寸的确定、双并列转子电机关键参数的优化。
2)DR-PMSM耦合区的存在使气隙磁场发生畸变,电机的三相磁链、反电动势、电感等不对称的现象均是因耦合区磁路不对称而引起。同时,耦合区的存在还会增加电磁转矩中的偶次谐波并带来转子电磁力不平衡的问题。
3)占空角、耦合间距是决定耦合区结构的关键参数,直接影响电机的转矩脉动和转子电磁力。较小的占空角有利于改善关键性能,耦合间距需要根据具体情况进行选择。样机试验结果表明了所提设计方法的可行性,能够为DR-PMSM的工程应用提供理论指导。
参考文献
[1] 马伟明, 王东, 程思为, 等. 高性能电机系统的共性基础科学问题与技术发展前沿[J]. 中国电机工程学报, 2016, 36(8): 2025-2035.
Ma Weiming, Wang Dong, Cheng Siwei, et al. Common basic scientific problems and development of leading-edge technology of high performance motor system[J]. Proceedings of the CSEE, 2016, 36(8): 2025-2035.
[2] 龚夕霞, 李焱鑫, 卢琴芬. 模块化永磁直线同步电机考虑制造公差的推力鲁棒性优化[J]. 电工技术学报, 2024, 39(2): 465-474, 513.
Gong Xixia, Li Yanxin, Lu Qinfen. Thrust robustness optimization of modular permanent magnet linear synchronous motor accounting for manufacture tolerance[J]. Transactions of China Electrotechnical Society, 2024, 39(2): 465-474, 513.
[3] Li Jiaxin, Di Chong, Bao Xiaohua. Efficiency improvement for submersible motors by optimizing the ratio of diameter to shaft length[J]. IEEE Transa- ctions on Magnetics, 2022, 58(2): 8200806.
[4] Song Yongda, Liu Guangwei, Yu Siyang, et al. Investigation of a low-speed high-torque-density direct- drive external-rotor PMSM for belt conveyor appli- cation[J]. IEEE Access, 2023, 11: 110479-110489.
[5] 中华人民共和国工业和信息化部. 两部门关于印发《电机能效提升计划(2021-2023年)》的通知[OL]. 北京: 工业和信息化部办公厅, 市场监督管理总局办公厅. https://wap.miit.gov.cn.
[6] 于思洋, 王宇, 张岳, 等. 基于代理模型的双气隙混合转子低速大转矩同步电机优化设计[J]. 电机与控制学报, 2024, 28(10): 66-75.
Yu Siyang, Wang Yu, Zhang Yue, et al. Optimal design of low-speed high-torque synchronous motor with double air gap and hybrid rotor based on proxy model[J]. Electric Machines and Control, 2024, 28(10): 66-75.
[7] Zhao Yu, Li Dawei, Ren Xiang, et al. Optimal pole ratio of spoke-type permanent magnet vernier machines for direct-drive applications[J]. CES Transactions on Electrical Machines and Systems, 2022, 6(4): 454- 464.
[8] Wu Shengnan, Li Zhimin, Tong Wenming. Research on thermal calculation and end winding heat con- duction optimization of low speed high torque permanent magnet synchronous motor[J]. CES Transa- ctions on Electrical Machines and Systems, 2023, 7(4): 397-403.
[9] 范良志, 林子镇, 陈振, 等. 织针直驱直线电机技术研究进展与挑战[J]. 电气技术, 2024, 25(6): 1-13, 23.
Fan Liangzhi, Lin Zizhen, Chen Zhen, et al. Research progress and challenges of the linear motor tech- nology for direct driving knitting needle[J]. Electrical Engineering, 2024, 25(6): 1-13, 23.
[10] Yu Yanlei, Pei Yulong, Chai Feng, et al. Performance comparison between permanent magnet synchronous motor and vernier motor for in-wheel direct drive[J]. IEEE Transactions on Industrial Electronics, 2023, 70(8): 7761-7772.
[11] 黄磊, 魏莱, 杨建龙, 等. 基于模型预测的直驱式波浪发电机机侧最优功率控制技术[J]. 电工技术学报, 2024, 39(14): 4391-4404.
Huang Lei, Wei Lai, Yang Jianlong, et al. Optimal power control technology of direct-drive wave power generation system based on model prediction[J]. Transactions of China Electrotechnical Society, 2024, 39(14): 4391-4404.
[12] Liu Guangwei, Liu Meiyang, Zhang Yue, et al. High- speed permanent magnet synchronous motor iron loss calculation method considering multiphysics factors[J]. IEEE Transactions on Industrial Electronics, 2020, 67(7): 5360-5368.
[13] Liu Zeyu, Zhang Bingyi, Hu Yan, et al. Design and analysis of concave-core stator direct-drive permanent magnet motor[J]. IET Electric Power Applications, 2023, 17(9): 1182-1196.
[14] 戴思锐, 厉伟, 冯桂宏, 等. 基于PDC-PMSM的双螺杆泵系统刚度及模态分析[J]. 机电工程, 2022, 39(2): 141-149, 165.
Dai Sirui, Li Wei, Feng Guihong, et al. Rigidity and modal analysis of twin-screw pump system based on PDC-PMSM[J]. Journal of Mechanical & Electrical Engineering, 2022, 39(2): 141-149, 165.
[15] Chen Qing, Yang Xiangyu, Zhong Guanming, et al. Design and analysis of double stator swing rotating permanent magnet spherical motor[J]. IEEE Transa- ctions on Magnetics, 2022, 58(8): 8204712.
[16] Xiang Zixuan, Bi Sheng, Zhu Xiaoyong, et al. High torque density and lightweight design of permanent magnet in-wheel motor based on magnetic field modulation effect[J]. IEEE Transactions on Mag- netics, 2023, 59(11): 8205207.
[17] 潘义阳, 徐衍亮, 徐凤辉. 新型盘式横向磁通永磁风力发电机的设计与分析[J]. 微电机, 2023, 56(2): 7-11.
Pan Yiyang, Xu Yanliang, Xu Fenghui. Design and analysis of a new disk type transverse flux permanent magnet wind generator[J]. Micromotors, 2023, 56(2): 7-11.
[18] 于丰源, 陈昊, 闫文举, 等. 宽窄定子极轴向磁通开关磁阻电机的设计与分析[J]. 电工技术学报, 2023, 38(5): 1261-1274.
Yu Fengyuan, Chen Hao, Yan Wenju, et al. Design and characteristic analysis of a wide-narrow stator poles axial flux switched reluctance machine[J]. Transactions of China Electrotechnical Society, 2023, 38(5): 1261-1274.
[19] 黄家楠, 章玮. 定子连体双轴永磁电机稳态特性分析[J]. 电机与控制学报, 2023, 27(6): 1-7.
Huang Jianan, Zhang Wei. Analysis of steady state characteristics of connected permanent magnet syn- chronous motor[J]. Electric Machines and Control, 2023, 27(6): 1-7.
[20] 陶大军, 陈阳, 李峥, 等. 双并列转子永磁直驱电机转子不平衡力分析与优化[J]. 电工技术学报, 2024, 39(10): 2961-2973.
Tao Dajun, Chen Yang, Li Zheng, et al. Analysis and optimization of unbalanced electromagnetic force on the rotor of dual-parallel rotor permanent magnet direct-driven motor[J]. Transactions of China Elec- trotechnical Society, 2024, 39(10): 2961-2973.
[21] 陈阳, 陶大军, 王立坤, 等. 双并列转子永磁同步电机转矩脉动产生机理及抑制[J]. 电工技术学报, 2024, 39(20): 6357-6370.
Chen Yang, Tao Dajun, Wang Likun, et al. Mechanism and suppression of torque ripple of dual-parallel rotor permanent magnet synchronous motor[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(20): 6357-6370.
[22] 戈宝军, 范阵雨, 林鹏. 双并列转子永磁电机非对称负载运行特性[J]. 电机与控制学报, 2024, 28(10): 55-65.
Ge Baojun, Fan Zhenyu, Lin Peng. Asymmetric load operation characteristics of dual-parallel rotor per- manent magnet synchronous motor[J]. Electric Machines and Control, 2024, 28(10): 55-65.
Abstract In parallel-to-drive mechanical equipment, such as a double screw pump, a two-high mill, and a roll crusher, the mainstream of current driving mode is single-motor master-slave driving. A single motor transmits torque to the drive shaft through the transmission links. The driven shaft is driven by the mechanical synchronous gears between the two shafts, thus achieving reverse synchronous rotation. This driving mode has several issues, including a large equipment volume, low system efficiency, significant mechanical noise, challenging sealing, and regular maintenance requirements. Additionally, the single motor drive is primarily composed of an induction motor and a gearbox transmission, resulting in significant energy loss throughout the entire transmission system. This paper proposes a novel dual-parallel rotor permanent magnet synchronous motor (DR-PMSM) for directly driving parallel-to-parallel mechanical equipment. The DR-PMSM can eliminate the redundancy of the transmission system, offering advantages such as a small system size, high system efficiency, gearless transmission, and low mechanical noise.
The design method and electromagnetic characteristics of DR-PMSM are studied. The structure of DR-PMSM is described, and the new design parameters are defined. The operating principle of DR-PMSM is analyzed, and the effect of each magnetic flux path on the motor is studied. The general design process of this kind of motor is explored, and the design method and determination principle of each key link are given. On this basis, a DR-PMSM is designed, and a finite element model is constructed to analyze its electromagnetic characteristics, including the magnetic field, back electromotive force, inductance, torque, rotor electromagnetic force, and efficiency. The reasons for the asymmetry or imbalance in various electromagnetic characteristics are revealed. Additionally, the influence of key parameters on key performance is discussed, and the method for selecting and optimizing these parameters is provided. A DR-PMSM is manufactured, and a test platform is set up to verify the correctness of the proposed design method.
The following conclusions can be drawn. (1) The design process of DR-PMSM is divided into three parts. The key design links of each part are the determination of the coupling angle, the selection of the main size for the single-sided conventional motor, and the optimization of key parameters. (2) The coupling area of DR-PMSM distorts the air gap magnetic field. The asymmetric phenomenon of three-phase flux linkage, back EMF, inductance, etc., is caused by the asymmetry of the magnetic circuit in the coupling area. At the same time, the coupling area increases even harmonics in the electromagnetic torque, causing the rotor's electromagnetic force to become unbalanced. (3) Duty angle and coupling distance are the key parameters that determine the structure of the coupling area and directly affect the torque ripple and rotor electromagnetic force. The smaller duty angle is conducive to improving the key performance, and the coupling spacing needs to be selected according to the specific situation. The experimental results of the prototype demonstrate the feasibility of the proposed design method, providing theoretical guidance for the engineering application of DR-PMSM.
Keywords:Dual-parallel rotor, permanent magnet synchronous motor, electromagnetic design, electro- magnetic characteristic
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.250231
黑龙江省自然科学基金(LH2023E084)和国家自然科学基金(51777048)资助项目。
收稿日期 2025-02-17
改稿日期 2025-03-17
陈 阳 男,1995年生,博士研究生,研究方向为永磁及特种电机的设计与分析。
E-mail: chenyang2022@foxmail.com
陶大军 男,1982年生,教授,博士生导师,研究方向为大电机和特种电机的基础理论、设计与分析。
E-mail: tao.dj@163.com(通信作者)
(编辑 崔文静)