图1 电机差模阻抗测试
Fig.1 The differential-mode impedance test of motor
摘要 近年来轴承电腐蚀问题频发,已成为高功率密度电驱动系统亟待解决的问题。轴承电压建模是轴承电腐蚀研究的基础,但现有模型精度不足。为此,该文提出基于端口阻抗特性的电机轴承电压建模方法,为轴承电腐蚀的评估和抑制提供精确模型。首先,针对电机端口阻抗特性,分析了阻抗参数对轴承电压建模的影响;其次,提出基于分布参数电路结构的轴承电压高频模型,给出了分布网络确定方法;然后,提出解析计算和智能算法相结合的模型参数识别方法;最后,以一台额定功率为60 kW的车用三相扁线永磁同步电机为例,对提出的模型进行仿真和实验验证。结果显示,该模型可以保证电机共模阻抗在全频段的仿真精度,轴承电压稳定幅值的仿真误差为5%,尖峰电压的最大仿真误差为8.6%,仿真与实验结果一致性较好,模型精度高。
关键词:端口阻抗 轴承电压 高频模型 分布参数
基于脉宽调制(Pulse Width Modulation, PWM)技术的电机控制器,其输出的共模电压经过电机内部高频寄生参数的耦合,会在轴承润滑油膜两端形成轴承电压,当其超过油膜击穿阈值时,会发生击穿放电现象,导致电火花加工(Electric Discharge Machining, EDM)轴承电流的发生[1]。放电瞬间产生的高温会使得击穿点附近滚道和滚珠表面金属发生熔融,形成腐蚀坑[2]。熔融的金属还会进入润滑剂中,不仅会劣化润滑性能,还会诱发后续击穿放电行为[3]。需要特别指出,持续性击穿放电会导致轴承累积损伤,初期表现为轴承温升和振动噪声水平增加,进而导致电机旋转异常,甚至出现轴承卡死现象,严重威胁电驱系统的安全性和可靠性[4]。
据统计,电机故障中超过40%是由轴承失效引起的,而电腐蚀损伤是导致轴承失效的主要原因之一[1, 5]。轴承电腐蚀损伤的产生根源在于轴承电压,其幅值和频率直接决定电腐蚀程度,轴承电压不仅会对电机轴承造成损伤,还会导致减速器轴承和齿轮出现电腐蚀问题[6]。在新能源汽车领域,为提高电驱系统效率和功率密度,高母线电压和碳化硅(Silicon Carbide, SiC)器件已成为主流技术方案[7-9]。然而,该高压高频驱动特性会导致轴承电压幅值和频率的显著升高,加剧轴承电腐蚀问题。
根据以上分析,轴承电压的准确计算对轴承电腐蚀抑制方法研究具有重要意义。文献[10-11]基于数值计算方法建立了电机高频阻抗模型,其建模过程首先建立单槽绕组的高频模型,随后通过特定的连接方法构建整个电机的阻抗模型,模型参数通过有限元仿真方法获取。然而,这类建模方法需要依赖详细的电机尺寸参数和材料特性,而在实际操作中,这些参数往往难以完全获取。因此,基于电机端口阻抗测量的建模方法更适合实际应用,该方法根据电机的端口阻抗建立电机高频模型,利用阻抗曲线关键点参数进行计算,获取模型的电路参数。根据模型特点,这类建模方法可分为三类:集总参数模型、分布参数模型和矢量拟合模型。
文献[12-14]将集总参数共模等效电路用于轴承电压建模,并将电机等效为RLC串联等效电路,这类模型结构简单、参数提取方便;但由于电机绕组高频阻抗具有分布参数特性,在这些集总参数模型中,高频寄生电容均被放置于电机中性点之后,使得模型无法准确描述绕组对机壳电容的分布参数特性,尤其对于阻抗中高频段的仿真效果较差,模型用于轴承电压仿真会带来较大误差。
文献[15-18]提出基于分布参数电路结构的轴承电压模型,将绕组对电机壳体寄生电容、绕组对转轴寄生电容均分成两部分,并在模型中添加表征涡流损耗效应的寄生电阻,使得模型可以描述电机共模阻抗曲线中两个串联谐振点的阻抗特性。但由于模型没有考虑定子铁心高频电阻,导致模型对谐振点附近的阻抗描述不准确;而且由于模型电路阶数不够,这些模型无法描述电机阻抗高频段的特性。文献[19]提出的模型进一步考虑了绕组对机壳的寄生电阻,提升了谐振点附近阻抗描述模型的精度,并且建立了带有绝缘轴承的轴承电压模型。但该模型电路阶数不足,同样无法描述电机阻抗高频段的特性。文献[20]提出的分布参数模型,提高了模型阶数,理论上可以描述电机共模阻抗更高频段的特性,但在参数计算过程中,对模型进行过度简化,导致参数计算结果存在一定误差,同时该研究没有对轴承电压进行仿真和实验验证。
文献[21-23]采用了矢量拟合模型,该类建模方法不需要考虑电机物理结构,只需要将电机看成“黑箱”,采用有理函数拟合方法逼近电机阻抗频域响应曲线,进而得到模型参数。这类模型对电机阻抗的仿真效果较好,但该类模型的电路结构复杂,且函数拟合方法得到的很多参数为负值,参数不具有实际物理意义。轴承电压建模需要基于准确的物理机理和耦合路径,完全依靠矢量拟合的方法不适用于轴承电压建模。轴承电压解析模型有助于分析耦合机理和影响因素,指导电机和控制器的优化设计。
综上所述,现有轴承电压高频模型不能保证阻抗在全频段范围内的仿真精度,尤其对高频段的仿真精度;而且模型参数识别方法仅依靠解析计算,这些原因最终导致轴承电压仿真与实验结果吻合度不好。此外,以上建模研究均基于感应电机,但三相内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor, IPMSM)阻抗有其特殊性,以上模型的适用性也有待验证。
本文围绕轴承电压高频模型和参数识别方法开展研究,提出一种电机轴承电压高精度模型。与以往工作相比,本文的贡献如下:
1)对IPMSM的端口阻抗特性进行分析,揭示端口阻抗与模型电感、电容和电阻等参数的关系。在此基础上,提出基于分布参数电路结构的轴承电压高频模型,可根据电机共模阻抗曲线串并联谐振点数量,灵活调整模型电路的单元数,根据需求拓宽模型应用频段,提升阻抗仿真精度。
2)提出基于解析计算和优化算法相结合的参数获取方法,通过解析计算获取模型参数的初值,之后采用优化算法对电阻参数进行优化,提升模型的仿真精度。
3)以一台额定功率为60 kW的车用IPMSM为例,开展仿真和实验工作,并与其他建模方法进行比较。结果验证本文模型具有较高精度,与其他模型相比具有优势,可用于评估电机轴承电压的水平,为腐蚀抑制方法研究提供模型支撑。
本文基于电机端口阻抗特性建立轴承电压高频模型,建模过程需要利用端口阻抗曲线上关键点的频率和阻抗信息,通过参数识别方法提取模型参数。因此,本节对电机端口阻抗进行测量和分析,对电机高频等效电感、电容和电阻参数进行介绍。
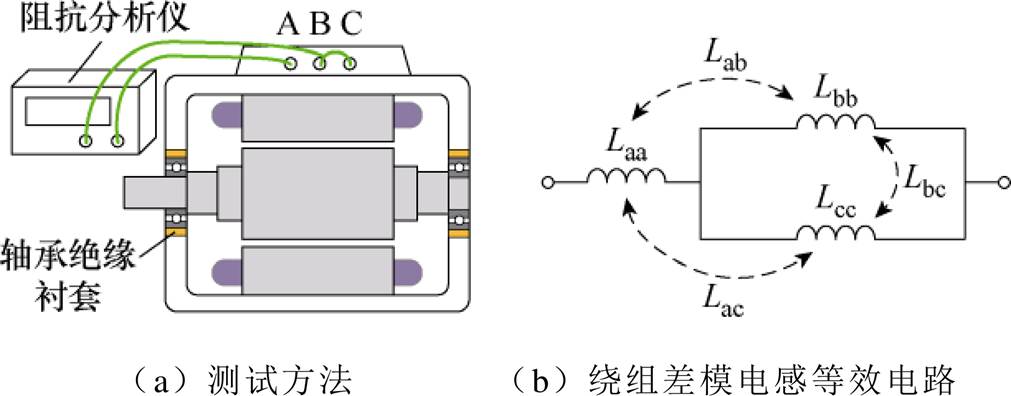
端口阻抗建模方法需测量电机的差模阻抗和共模阻抗,测试方法如图1a和图2a所示。其中,差模阻抗通过测量两相绕组并联后与另一相绕组串联的总阻抗获得,而共模阻抗则通过测量三相绕组短接后与机壳之间的阻抗获得。为了分析差模和共模阻抗是否受转子位置影响,按照图1a和图2a的测量方法,得到绕组差模和共模电感的等效电路如图1b和2b所示。基于图1b和图2b,在本节后续内容中详细阐述电感参数的分析过程。
图1 电机差模阻抗测试
Fig.1 The differential-mode impedance test of motor
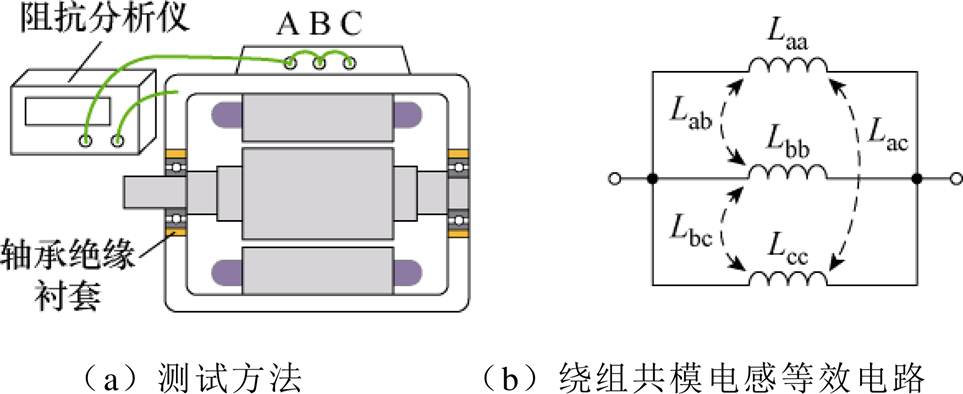
图2 电机共模阻抗测试
Fig.2 The common-mode impedance test of motor
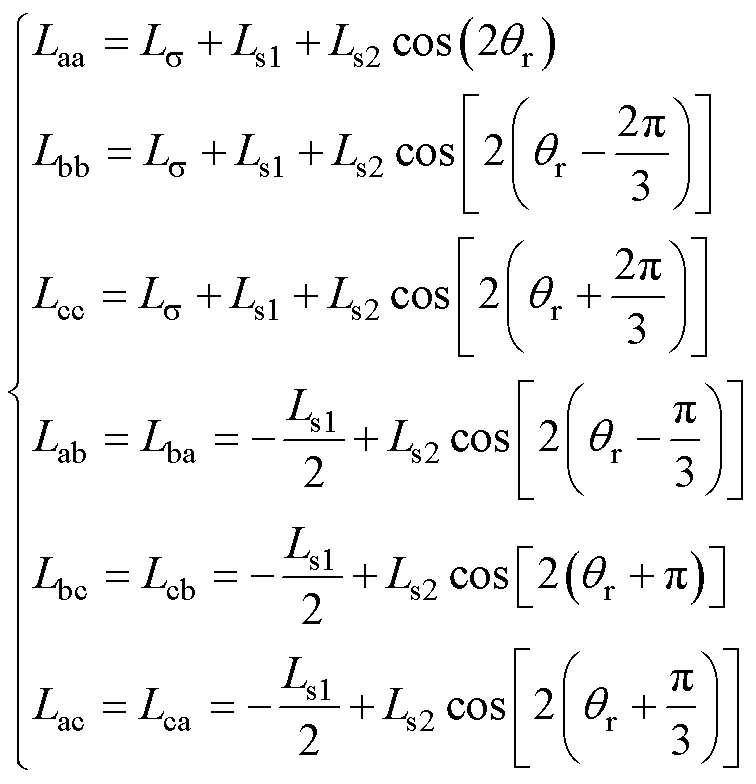
三相永磁同步电机定子绕组的自感和互感[24]可以表示为
 (1)
(1)
式中,Laa、Lbb、Lcc分别为A、B、C三相绕组自感;Lab、Lba、Lbc、Lcb、Lac、Lca为三相绕组之间互感;Ls为每相绕组漏自感;qr为转子位置电角度;Ls1为各相定子绕组自感平均值;Ls2为各相绕组自感的2次谐波幅值。电机参数确定后,Ls1、Ls2为恒定值。
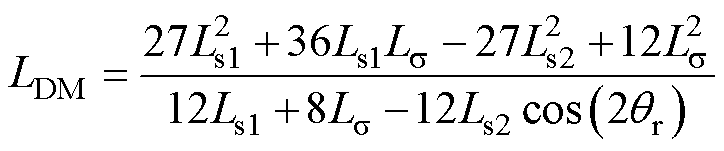
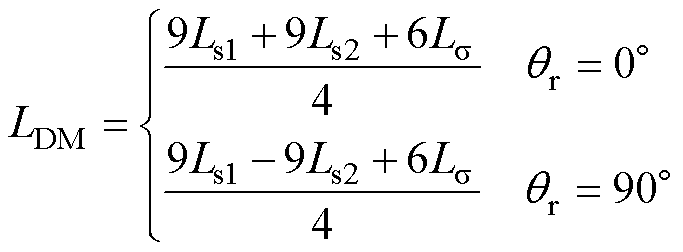
根据式(1)和图1b,基于耦合电感去耦原则,得到绕组差模电感LDM为
 (2)
(2)
式(2)表明,转子位置会影响IPMSM的LDM,这与感应电机的差模阻抗特性不同[18-19]。由式(2)进一步得到式(3),当qr=0°时,定子绕组轴线与转子q轴重合,此时LDM最大;当qr=90°时,定子绕组轴线与转子d轴重合,此时LDM最小。
 (3)
(3)
根据式(1)和图2b,基于并联耦合电感去耦原则,推导出绕组共模电感LCM为
 (4)
(4)
式(4)表明转子位置不影响LCM。
根据以上分析,IPMSM的差模电感与转子位置有关,而共模电感与转子位置无关,进而导致差模阻抗受转子位置影响,共模阻抗则不受转子位置影响,这些结论在1.3节图6a和图6b的电机差模和共模阻抗实测结果中得到验证。差模阻抗随转子位置变化的特性,需要在建模方法中特殊考虑。
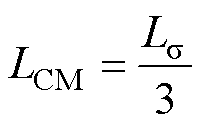
高频共模电压Vcm经过电机内部寄生电容的耦合作用,在轴承两端形成轴承电压Vb。图3a为实验电机内部寄生电容分布示意图,实验电机两端轴承室安装有厚度为2 mm的轴承绝缘衬套。图3b为该电机集总参数电容等效电路。Cwg_total为绕组(w点)对机壳(g点)的总寄生电容,Cwr_total为绕组对转轴(r点)的总寄生电容;Crg为转轴对机壳的总寄生电容,Cins1和Cins2为电机两侧轴承绝缘衬套寄生电容,Cb1、Cb2为电机两侧轴承油膜等效电容;Cwg_point、Cwr_point、Crg_point分别为绕组对机壳、绕组对转轴、转轴对机壳三个端口各自的总寄生电容。
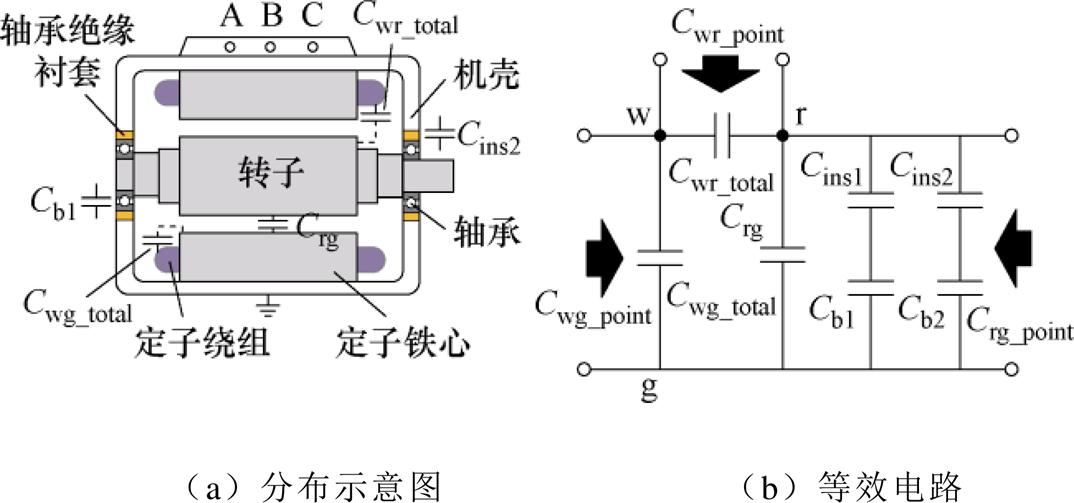
图3 IPMSM内部寄生电容示意图
Fig.3 The schematic diagram of parasitic capacitances inside IPMSM
Cins1、Cins2由轴承绝缘衬套的材料特性决定,容值可以通过阻抗分析仪直接测量获得。以如图4所示的“梨形槽”槽型为例,Cwg_total、Cwr_total、Crg的计算公式见式(5)~式(7)所示[14]。所有变量的意义如图4所示。图中,d1为槽绝缘层厚度,d2为槽楔厚度,d3为槽楔与转子之间的距离,dd为定子齿与转子之间的距离,lsolt为定子槽的周长,wtooth为定子齿的宽度。Cb1、Cb2主要由轴承润滑油膜厚度决定,受转速、转矩、温度等参数影响很大,式(8)为其简化计算公式[14]。
图4 槽型尺寸说明
Fig.4 Illustration of slot dimensions
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
式中,Ns为电机槽数;e0为真空介电常数;er1、er2、erb为槽绝缘、槽楔、轴承润滑剂的相对介电常数;Sb1和Sb2为轴承滚珠和内外圈表面的等效接触面积;db为接触位置的等效油膜厚度。
这些电容中,Cwg_total最大,在共模阻抗中起主要作用[25]。Cwr_total和Crg、Cb1、Cb2值相对较小,但根据图3b,这些寄生电容形成的耦合路径是Vcm产生Vb的关键。根据以上分析,电机内部寄生电容主要是电机尺寸的函数,与电机磁场无关,其值不受转子位置和共模电压激励频率的影响,容易通过测量电机端口阻抗进行识别。
除电感和电容以外,高频共模回路中还存在寄生电阻参数,包括用于描述定子铁心高频附加损耗效应的电阻,用来描述涡流效应的电阻等。在轴承电压高频模型中,这些电阻参数为共模回路提供一定阻尼,限制共模电流的大小。
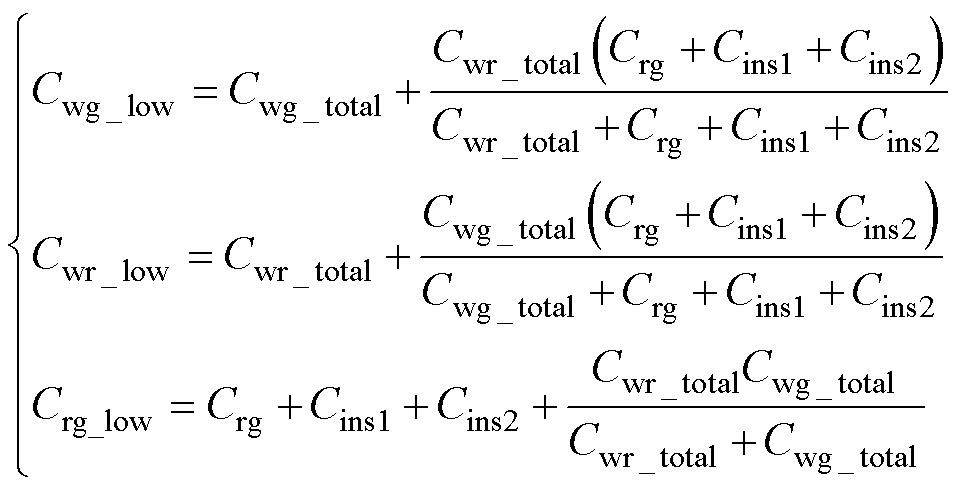
本文基于电机端口阻抗特性开展轴承电压建模研究,单纯依靠电机差模和共模阻抗无法完全提取所有模型参数,还需要测试一些特殊的电机端口阻抗,包括:绕组对机壳、转轴对机壳、绕组对转轴的端口阻抗。这三个端口阻抗曲线在低频下都呈现纯容性,文献[12, 19-20]利用这三个端口阻抗的低频点参数,得到三个方程如式(9)所示,联立方程可得到图3b中的Cwr_total、Crg和Cwg_total。
 (9)
(9)
式中,Cwg_low为利用绕组对机壳低频段阻抗计算得到的电容;Cwr_low为利用绕组对转子低频段阻抗计算得到的电容;Crg_low为利用转子对机壳低频段阻抗计算得到的电容。这里的低频段一般是指频率小于100 kHz的纯容性阻抗段。
但该方法在实际应用中,联立式(9)的三个方程,得到的电容结果容易出现负值,没有实际物理意义。分析其原因,Cwr_total、Crg、Cwg_total具有数量级的差距,Cwg_total≈(8~15)Crg,Crg≈(8~20)Cwr_total[16, 18, 20],相比于Cwg_low,按照文献的测量方法得到的Cwr_low和Crg_low值较小,容易受到测量误差的干扰;此外,式(9)需要进行多次乘除法运算和求解二次方程,这些原因导致误差被放大,容易使求解结果出现负值。
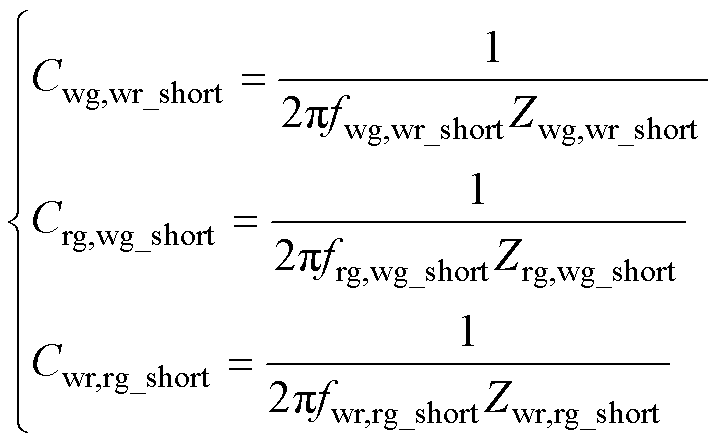
为了解决以上问题,本文提出了一种基于短路法的电机端口阻抗测试方法,该方法在测试某端口阻抗时,利用短路线对电机其他相应端口进行短路处理,具体测量方法如图5所示,测试结果如图6c~图6e所示。图6c~图6e中的阻抗曲线在低频下都呈现纯容性,又根据图3b的电机端口电容关系,可得到式(10)和式(11)。相对于Cwg,wr_short和Cwr,rg_short,式(11)中只有Crg,wg_short这一项的值相对较小,且式(11)方程简单,只有加减计算。因此,将图6c~图6e曲线上的点Pwg,wr_short、Prg,wg_short、Pwr,rg_short参数代入式(10)和式(11),可得到准确的Cwg_total、Cwr_total和Crg,计算结果可避免出现负值。
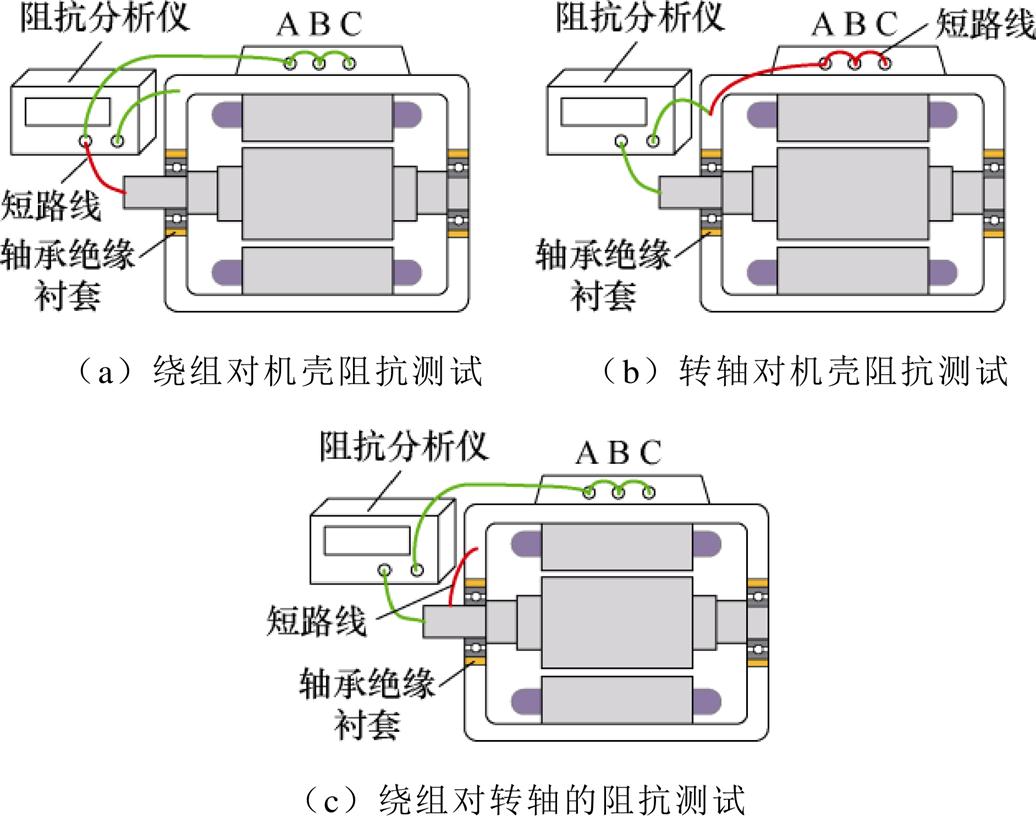
图5 基于短路法的电机端口阻抗测试示意图
Fig.5 The schematic diagram of motor port impedance test based on short-circuit method
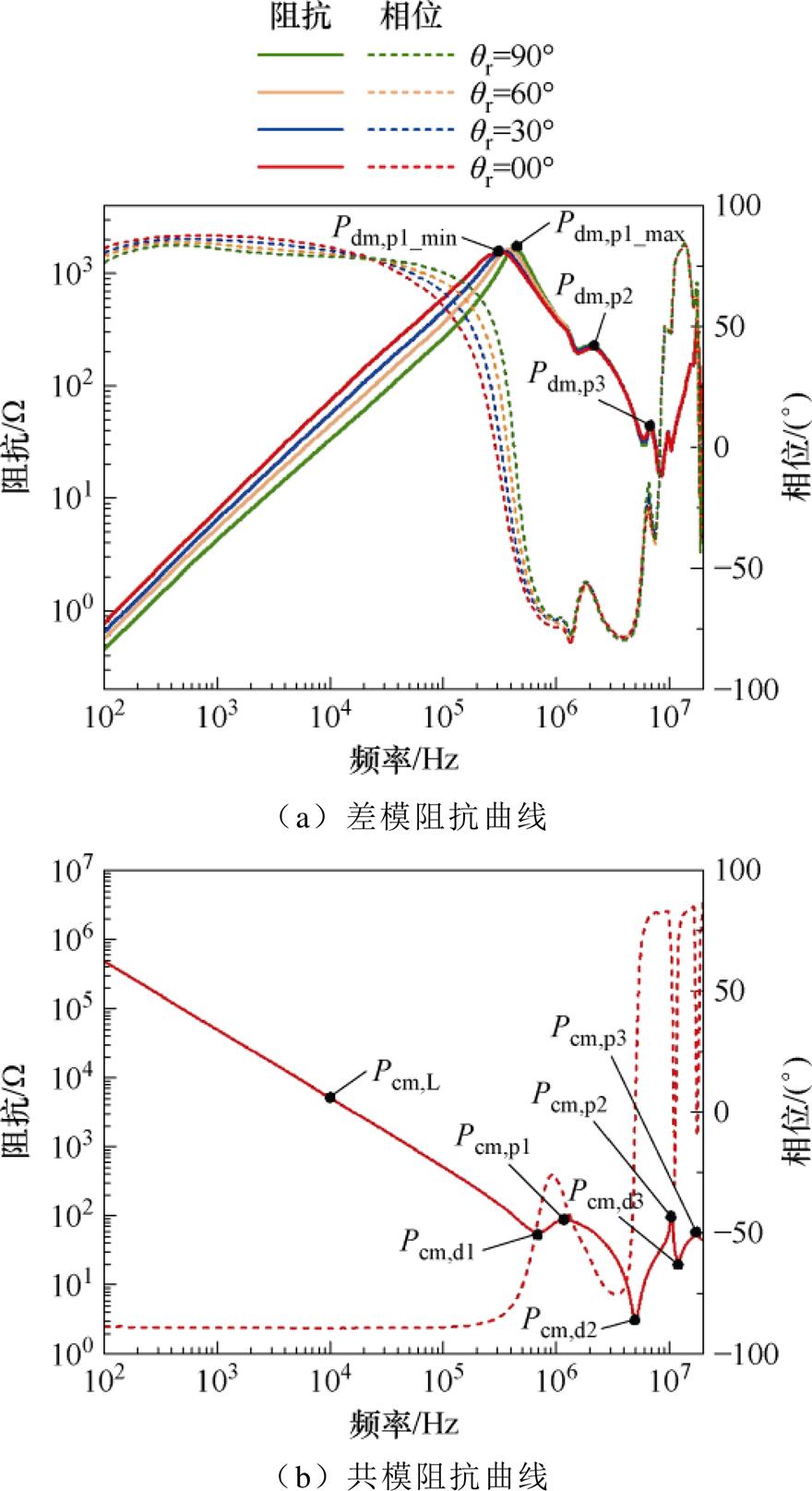
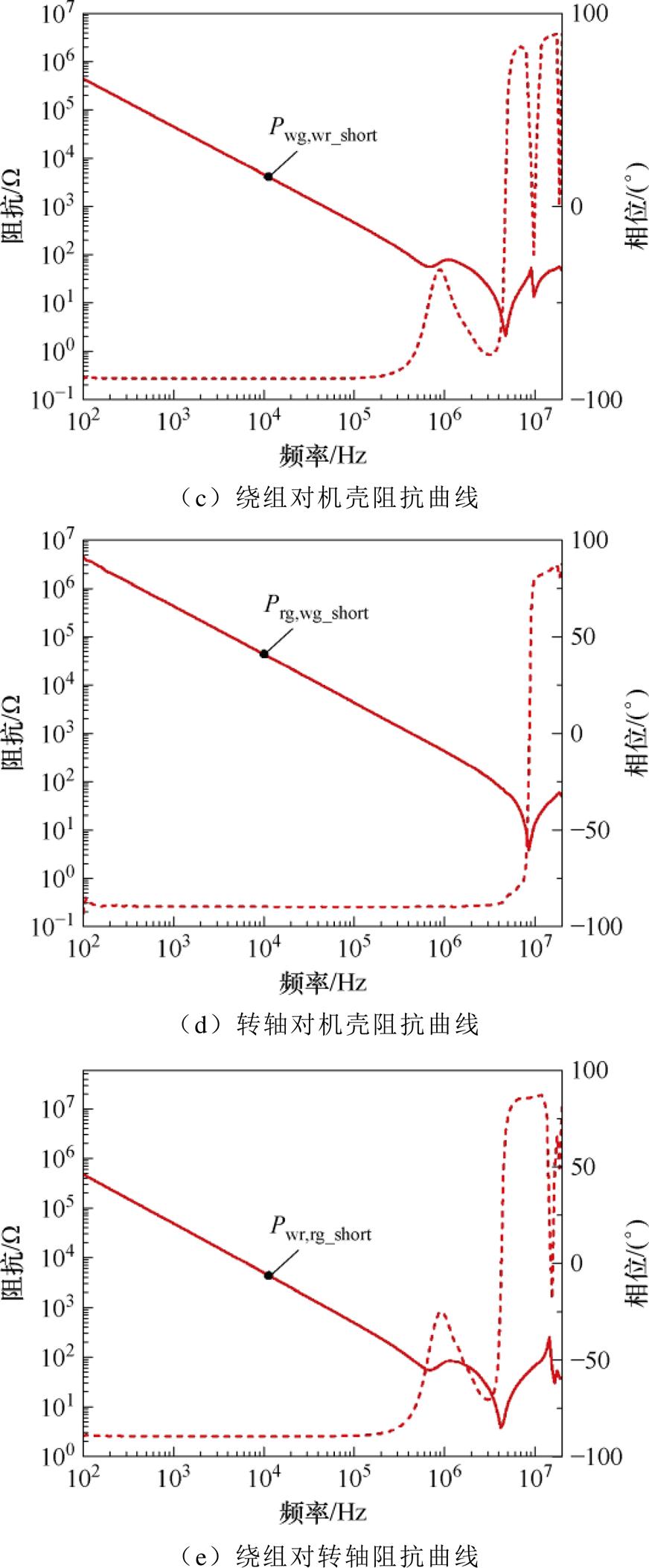
图6 电机阻抗曲线实测结果
Fig.6 The measured results of motor impedance curves
 (10)
(10)
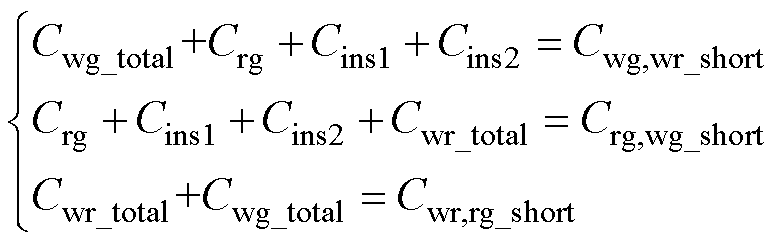 (11)
(11)
式中,fwg,wr_short、frg,wg_short、fwr,rg_short和Zwg,wr_short、Zrg,wg_short、Zwr,rg_short分别为点Pwg,wr_short、Prg,wg_short、Pwr,rg_short的频率和阻抗,其余变量含义在1.2节中有解释,不再赘述。
根据图1a的差模阻抗测试方法,电机差模阻抗主要反映的是电机三相绕组之间的阻抗特性。图6a中差模阻抗曲线在第1个谐振点以下频段,表现为纯感性;但当频率超过第1个谐振点频率后,阻抗特性在容性和感性之间多次变化,曲线出现多个谐振点,这些谐振点是由绕组电感和匝间高频寄生电容发生串并联谐振导致的。在800 kHz以下频率段,差模阻抗与转子位置有关,这与1.1节的理论分析结论一致;当qr=0°时,阻抗最大,qr=90°时,阻抗最小,Pdm,p1_min和Pdm,p1_max分别是qr=90°和qr=0°时的差模阻抗曲线第1谐振点的阻抗峰值。然而,当频率大于800 kHz,差模阻抗与转子位置无关,原因在于该频段内绕组漏感和匝间高频电容起主要作用,而漏感和高频寄生电容不受转子位置影响。图6a的差模阻抗主要用于计算模型中的涡流损耗电阻,计算中需要考虑转子位置角的影响。
根据图2a的共模阻抗测试方法,电机共模阻抗主要反映的是电机绕组与定子铁心之间的阻抗特性。如图6b所示,共模阻抗与转子位置无关,这与1.1节的理论分析结论一致。第1谐振点Pcm,d1以下频段阻抗表现为纯容性(703 kHz以下频段),这是因为绕组与定子铁心近似为金属极板,而二者之间的绝缘层和空气充当电容介质,使得在此频段内阻抗表现为纯容性。随频率的增加,阻抗特性在容性和感性之间变化,出现多个谐振点,这主要是由于绕组高频电感和寄生电容发生串并联谐振造成的。共模电压经过电机共模阻抗路径的耦合作用形成轴承电压,因此,轴承电压高频模型需要能够准确描述电机共模阻抗特性。图6b中共模阻抗曲线上串并联谐振点数决定本文分布参数模型的电路单元数,共模阻抗曲线上一些关键点参数用于计算模型的共模电感、绕组对机壳的高频电容和电阻。
图6c~图6e是基于短路测试法得到的三个特殊电机端口阻抗曲线,这三个端口阻抗在低频下都呈现纯容性,将三个阻抗低频下的点Pwg,wr_short、Prg,wg_short、Pwr,rg_short参数代入式(10)和式(11),得到Cwg_total、Cwr_total和Crg,求得的这三个端口电容,用于计算本文分布参数模型各分布电容的具体值。
采用无源元件建立电机等效电路模型,电路参数通过端口阻抗测试结果获取,该建模方法已在一些研究中得到应用[18-20]。为了准确仿真轴承电压,模型的最高频率需要满足fmax<1/(ptr),其中tr为电机控制器输出电压的上升时间[16];现有SiC电机控制器的典型tr在20~100 ns范围内,模型的最高频率需要达到fmax=16 MHz,而现有轴承电压模型的最高频率在10 MHz以内[16-20]。
本文基于电机端口阻抗法,提出一种电机轴承电压高频模型如图7所示,模型最高频率可达20 MHz。为了更好地描述电机共模阻抗的多个谐振点特性,采用分布参数电路结构对电机定子绕组进行建模(图7中实线(红色)电路部分),由n个RLC电路网络组成,将共模阻抗曲线中串联谐振点Pcm,dn和并联谐振点Pcm,pn作为1对进行考虑,根据串联和并联谐振点的对数确定n;此外,图7中虚线(蓝色)部分的转轴对机壳电容、轴承绝缘衬套电容和轴承电容均采用集总参数等效电容表示。
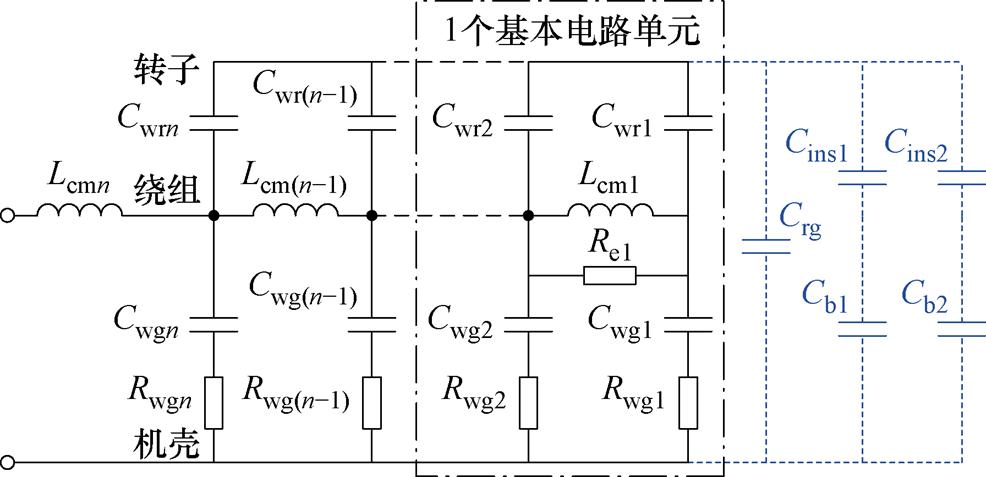
图7 本文提出的轴承电压高频模型
Fig.7 The high-frequency model of bearing voltage proposed in this paper
图7中,Crg为转子对机壳的寄生电容,Cwg1~Cwgn为绕组对机壳寄生电容,Cwr1~Cwrn为绕组对转子寄生电容,Lcm1~Lcm(n-1)、Re1~Re(n-2)、Rwg1~Rwgn分别为绕组共模电感、涡流损耗电阻和定子铁心电阻;Lcmn为阻抗测试实验中测试导线寄生电感和电机进线铜排寄生电感的总和。
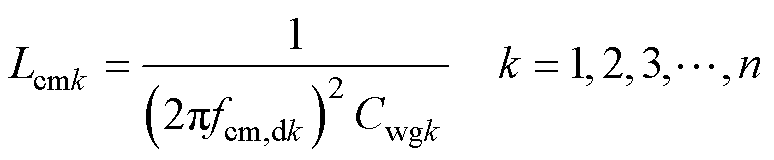
2.2.1 Cwgn、Lcmn参数
本节利用共模阻抗曲线的串、并联谐振点参数计算Lcmn和Cwgn,此时忽略Re1~Re(n-2)、Rwg1~Rwgn的影响,这些电阻可在之后通过谐振点阻抗进行求解。针对图7中红色电路部分,本文提出假设如式(12)所示,每个电路网络的共模电感都远大于其左侧网络的电感,这样在分析某一网络时,可以忽略其左侧网络共模电感的影响,左侧所有网络的共模电感可视为短路状态,从而推导出模型参数计算公式。定义wi为第i级电路网络中共模电感与其左侧第i+1级网络共模电感的比值,本模型中当wi>4时,即认为满足式(12)中假设,在计算某一单元共模电感时,可忽略其左侧单元共模电感的影响。需要说明的是,以上只是对模型进行假设,对电机阻抗行为无影响。
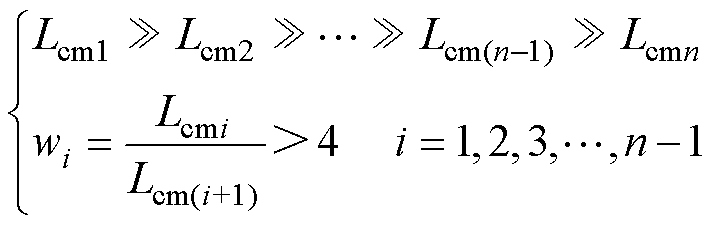 (12)
(12)
根据图6b,谐振点Pcm,d1之前的阻抗为纯容性,此频段定义为共模阻抗低频区域,此区域模型中所有电感的影响可以忽略,共模电感视为短路状态,得到Cwg_point为
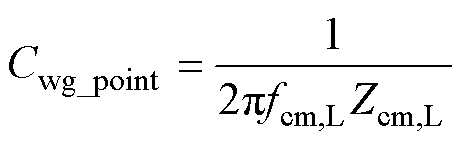 (13)
(13)
式中,fcm,L和Zcm,L分别为Pcm,L点的频率和阻抗。
图6b中的谐振点Pcm,d1和Pcm,p1,当满足式(12)的假设,电感Lcm2~Lcmn被视为短路。此时,在谐振点Pcm,d1,Lcm1与Cwg1发生串联谐振;在谐振点Pcm,p1,Cwg2~Cwgn并联后与Cwg1串联形成的总电容与Lcm1发生并联谐振。因此,可以得到
 (14)
(14)
 (15)
(15)
根据式(14)和式(15),可以得到
 (16)
(16)
 (17)
(17)
图7中,红色电路部分的每个电路单元与共模阻抗曲线中的一对串、并联谐振点一一对应,根据式(16)和式(17)进行递推,得到式(18)和式(19),可计算出所有Lcm1~Lcmn和Cwg1~Cwgn。根据式(12)和式(19),得到wi如式(20)所示,满足式(20)关系,才能利用式(18)和式(19)进行计算。否则,需要考虑临近电路单元参数的影响。
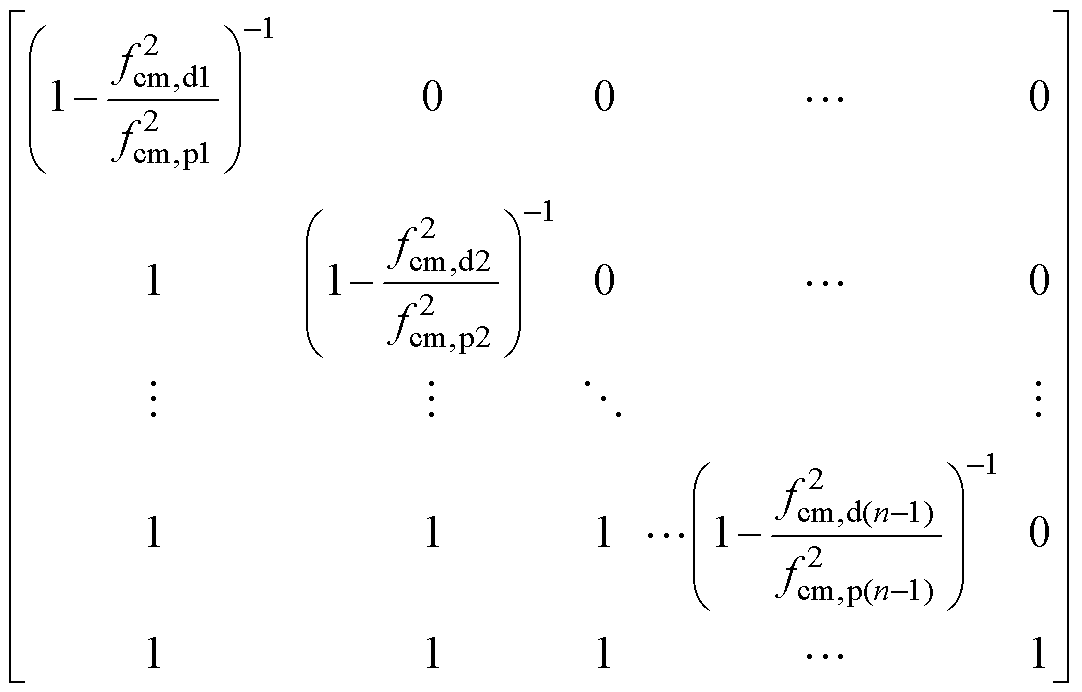
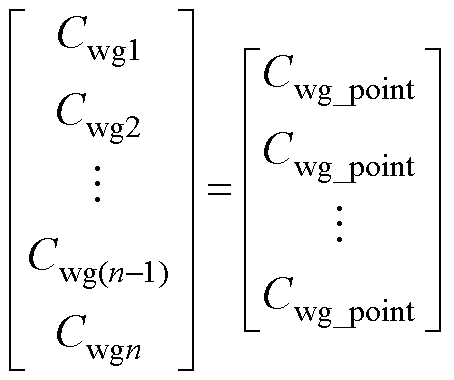 (18)
(18)
 (19)
(19)
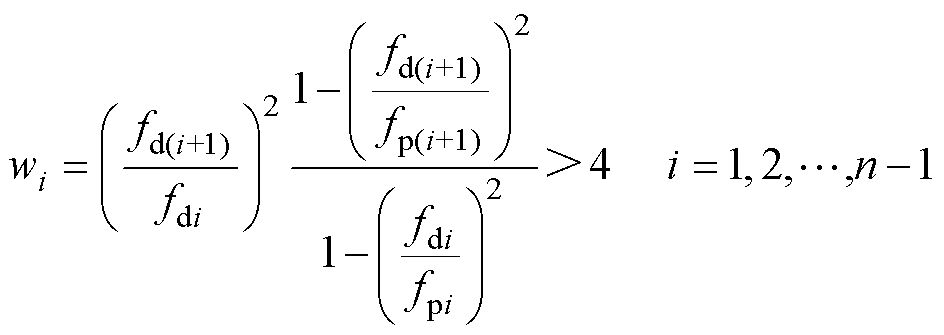 (20)
(20)
2.2.2 Cwrn、Crg、Rwgn、Re(n-2)参数
Cwr_total和Crg的计算方法已经在1.3节的式(10)和式(11)中给出。由于寄生电容是电机尺寸的函数,与激励频率无关,因此设Cwr1~Cwrn的比值与Cwg1~Cwgn的比值相同[19],得到如下关系
 (21)
(21)
根据式(10)、式(11)和式(21),可以计算得到Cwr1~Cwrn和Crg的值。
根据图7中红色电路部分,第n个电路单元中无Ren参数;又根据文献[26],Rek参数与频率成反比例关系,因此,为简化模型,忽略高频第n-1个网络中的Re(n-1)参数,此简化需要电路网络级数满足n>2。根据图1a,差模阻抗为测量定子绕组两相并联后与另一相串联的阻抗,又根据图6a中差模阻抗曲线,在峰值谐振点Pdm,p1~Pdm,pn,电路发生串联谐振,得到图7模型中的Rek[16]为
 (22)
(22)
式中,Zdm,pk为差模阻抗曲线在峰值谐振点Pdm,pk的阻抗;qdm,k为该点的相位。
受转子位置的影响,差模阻抗曲线在第1个谐振点存在多个阻抗峰值(见图6a中Pdm,p1_min和Pdm,p1_max点),采用(Re1_min+Re1_max)/2计算得到的平均值作为第1个电路单元中的Re1。
利用电机共模阻抗曲线中串联谐振点Pcm,d1~Pcm,dn的谐振阻抗,可以获得Rwgk为
 (23)
(23)
式中,Zcm,dk为共模阻抗曲线在谐振点Pcm,dk的阻抗;qcm,dk为该点的相位。
2.2.3 Cins1、Cins2、Cb1、Cb2参数
轴承绝缘衬套等效电容Cins1、Cins2,可利用阻抗分析仪直接测量获得。Cb1、Cb2除了受轴承本身尺寸参数和润滑剂特性的影响,还受转速、温度、载荷等工况特性的影响,影响机理复杂。轴承建模不是本文研究的重点,因此采用文献[27]中的方法计算Cb1、Cb2,轴承滚珠和滚道之间的接触面积[27]为
 (24)
(24)
式中,Shertz为赫兹接触面积;a为接触区域椭圆的长轴长度;b为接触区域椭圆的短轴长度。
采用式(25)计算滚珠和滚道之间接触中心的油膜厚度dhertz[27]为
 (25)
(25)
式中, 为润滑剂黏度压力指数;
为润滑剂黏度压力指数; 为常压下动力黏度;
为常压下动力黏度; 为平均线速度;E0为当量弹性模量;Rx为沿滚动方向的当量曲率半径;Qmax为滚动体所受最大载荷;K为接触区椭圆长轴与短轴比值。
为平均线速度;E0为当量弹性模量;Rx为沿滚动方向的当量曲率半径;Qmax为滚动体所受最大载荷;K为接触区椭圆长轴与短轴比值。
轴承润滑油膜电容可等效为由椭圆平板电极和润滑油膜构成的平板电容,其计算公式为
 (26)
(26)
本文实验电机采用的深沟球轴承型号为6004-2Z,相关参数见表1。
表1 实验电机6004-2Z深沟球轴承基本参数
Tab.1 The basic parameters of 6004-2Z deep groove ball bearing for experimental motor
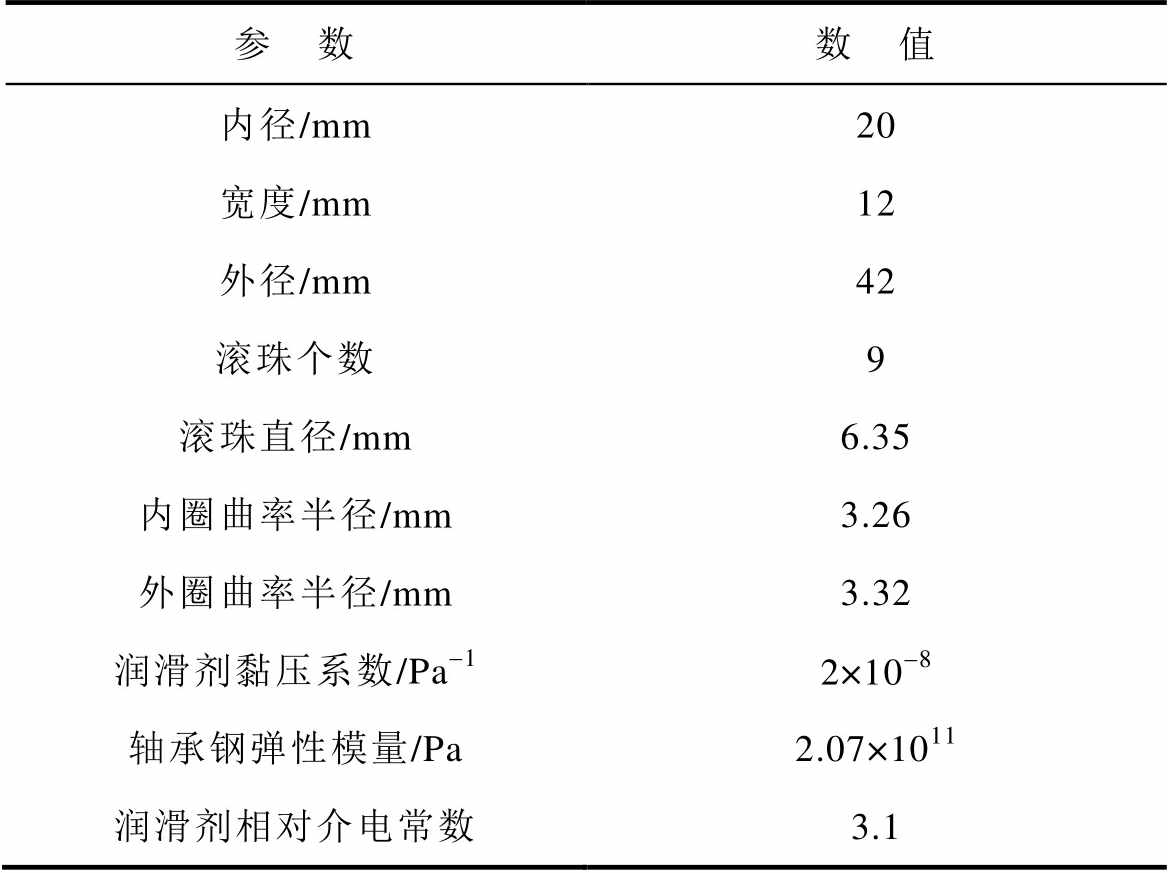
参 数数 值 内径/mm20 宽度/mm12 外径/mm42 滚珠个数9 滚珠直径/mm6.35 内圈曲率半径/mm3.26 外圈曲率半径/mm3.32 润滑剂黏压系数/Pa-12×10-8 轴承钢弹性模量/Pa2.07×1011 润滑剂相对介电常数3.1
2.2.4 基于遗传算法的模型参数优化
定子铁心高频电阻Rwgk和涡流损耗效应电阻Rek,很难通过解析计算获得准确值;但这些参数对阻抗曲线谐振点附近阻抗影响较大,需要进行微调。因此,本文以2.2.2小节计算得到的Rwgk、Rek参数作为初值,以图6b中实测的共模阻抗曲线为参考,以模型电路共模阻抗传递函数为优化方程,以Rwgk、Rek为优化变量,以方均根误差和最大相对误差为两个优化目标,采用遗传算法进行优化,获得Rwgk、Rek最佳值,使模型共模阻抗与实测曲线更接近,提升仿真精度。
参数优化过程如图8所示,算法具有足够的种群规模,初始样本选择是完全随机的,以覆盖整个搜索范围,初始化算法采用拉丁超立方抽样法;本文算法的交叉和变异概率具有较大初始值,且与收敛性相关联,随迭代次数逐步减小,避免种群过早收敛到局部最优;算法具有足够的迭代次数和严格的收敛条件,提高找到更优解的概率。
本文的解析模型有助于分析轴承电压的耦合机理和影响因素,将解析计算结果作为优化算法的初值,只对电阻参数进行优化,可避免优化变量过多带来的搜索速度慢,容易陷入局部最优等问题。解析计算和优化算法相结合的建模方法,不仅保留了模型的物理机理,还能提升模型仿真的精度。
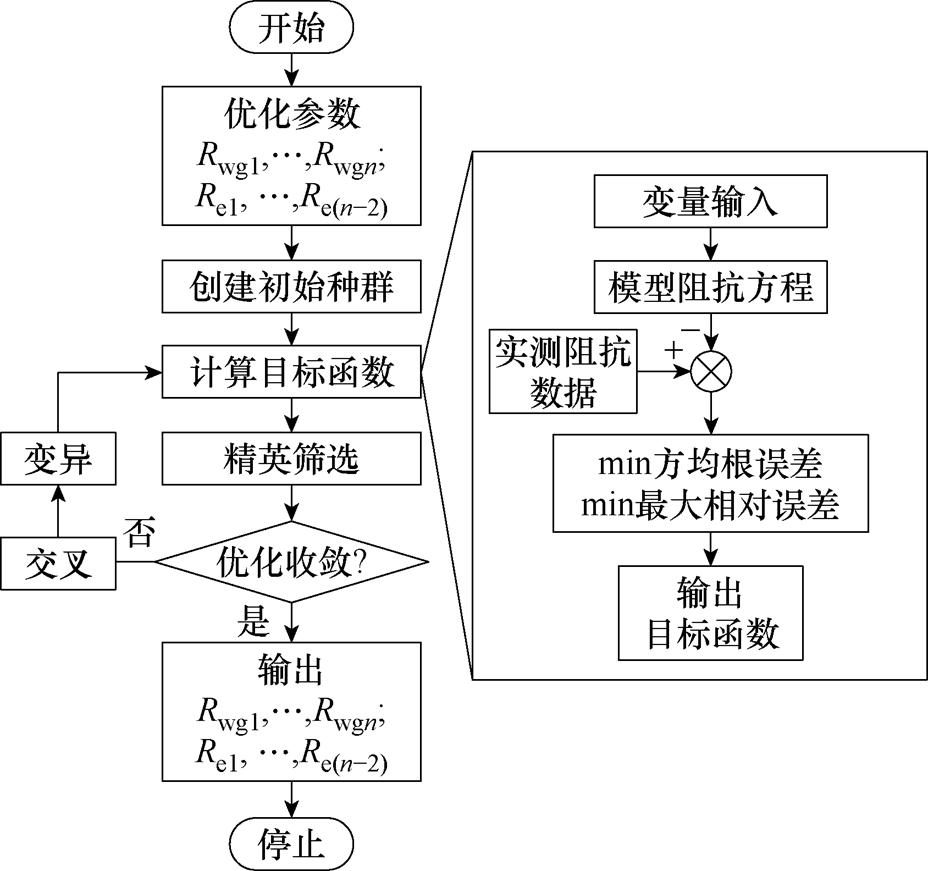
图8 基于遗传算法的模型参数优化过程
Fig.8 The model parameter optimization process based on genetic algorithm
根据图6中实测的电机端口阻抗曲线,得到模型参数计算所需的关键特征点参数见表2。根据表2,可以确定图7中红色电路的单元个数n=3,模型电路如图9所示。根据2.2节中推导的模型参数计算公式,代入表2中的各点参数,得到参数解析计算结果见表3。
表2 电机阻抗曲线的特征点参数
Tab.2 The characteristic point parameters of motor impedance curves
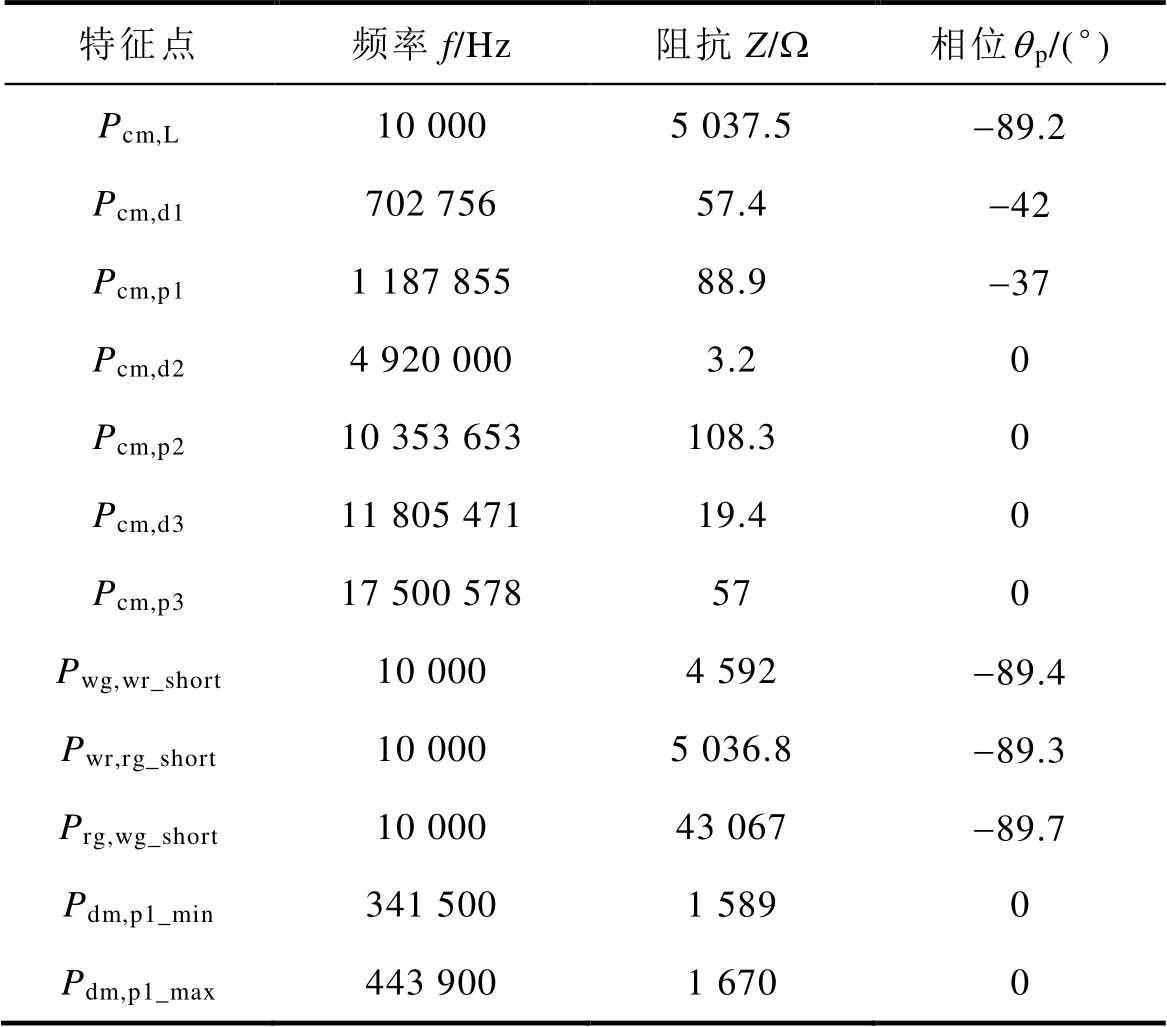
特征点频率f/Hz阻抗Z/W相位qp/(°) Pcm,L10 0005 037.5-89.2 Pcm,d1702 75657.4-42 Pcm,p11 187 85588.9-37 Pcm,d24 920 0003.20 Pcm,p210 353 653108.30 Pcm,d311 805 47119.40 Pcm,p317 500 578570 Pwg,wr_short10 0004 592-89.4 Pwr,rg_short10 0005 036.8-89.3 Prg,wg_short10 00043 067-89.7 Pdm,p1_min341 5001 5890 Pdm,p1_max443 9001 6700
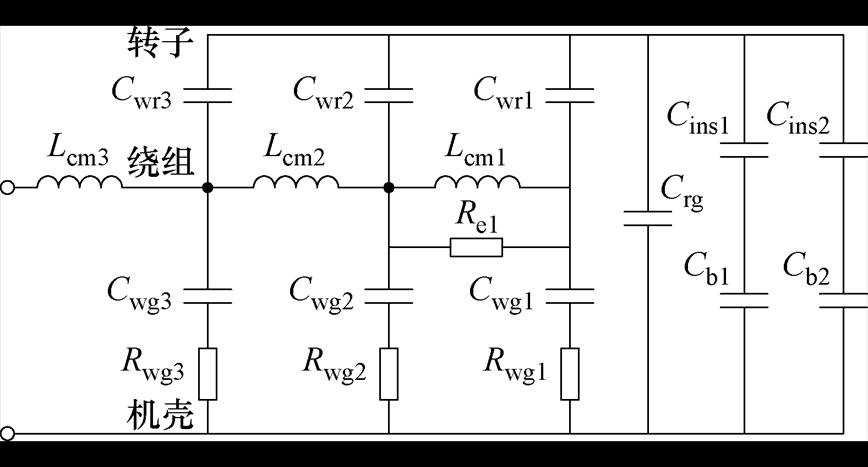
图9 实验电机轴承电压高频模型
Fig.9 The high-frequency model of bearing voltage for experimental motor
表3 本文模型的参数获取结果
Tab.3 The parameter extraction results of the model proposed in this paper
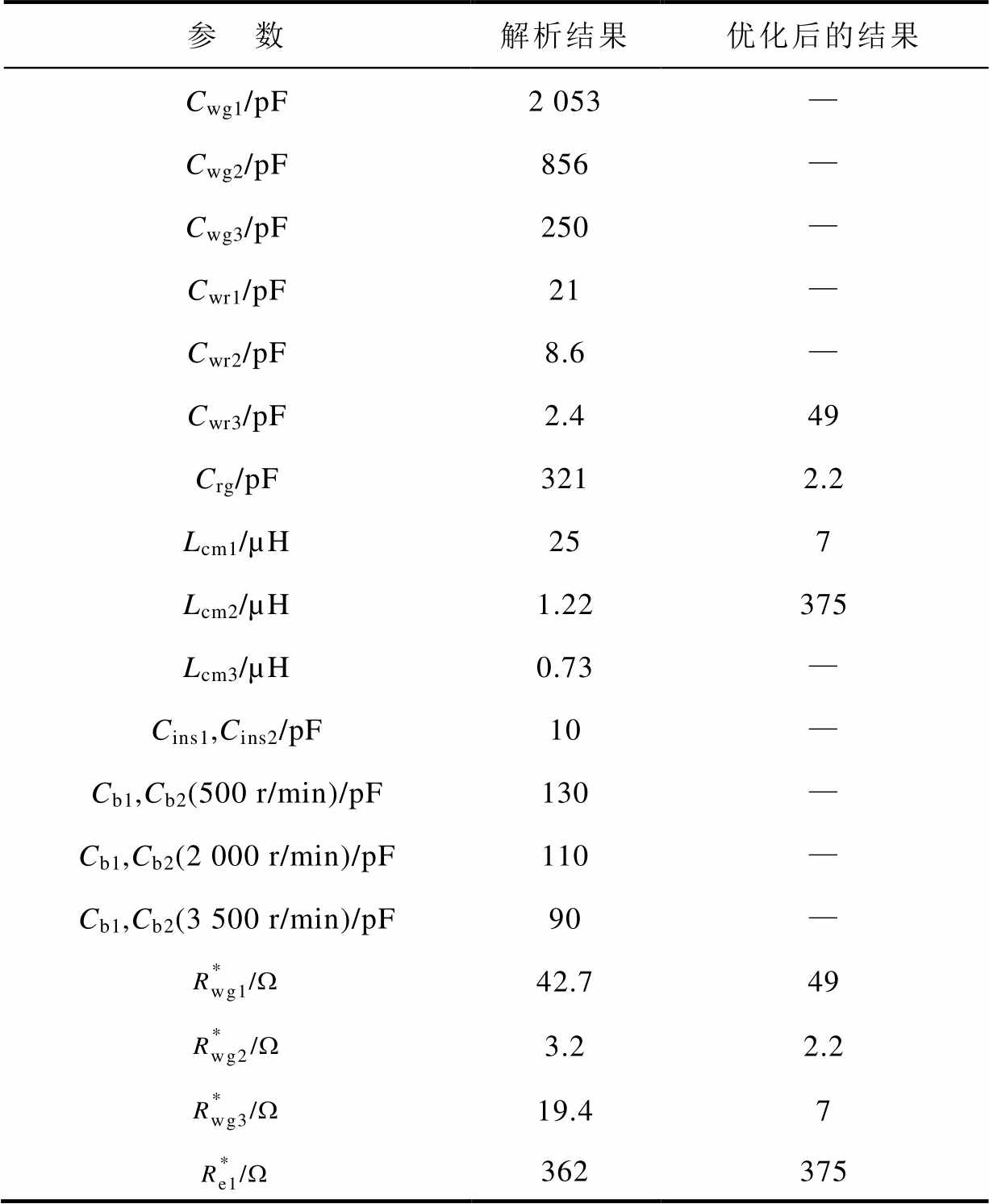
参 数解析结果优化后的结果 Cwg1/pF2 053— Cwg2/pF856— Cwg3/pF250— Cwr1/pF21— Cwr2/pF8.6— Cwr3/pF2.449 Crg/pF3212.2 Lcm1/µH257 Lcm2/µH1.22375 Lcm3/µH0.73— Cins1,Cins2/pF10— Cb1,Cb2(500 r/min)/pF130— Cb1,Cb2(2 000 r/min)/pF110— Cb1,Cb2(3 500 r/min)/pF90— 42.749 3.22.2 19.47 362375
注:*表示需要进行优化的参数。
根据图8,以表2中Rwg1、Rwg2、Rwg3和Re1的解析计算结果为初值,以图6b中实测的共模阻抗数据为参考,采用优化算法对Rwg1、Rwg2、Rwg3和Re1进行优化。优化算法的种群大小为500个,迭代次数为500代,变量优化范围设置为初始值的0.3~2倍之间。交叉和变异概率初始值设置为0.5,为了避免过早收敛到局部最优,在优化过程中前100代保持交叉和变异概率为0.5不变,在100代之后,交叉和变异概率与Pareto前沿的移动距离相关,在100代以后至优化结束,交叉和变异概率由0.5逐渐减小到0.2。本文算法通过观察Pareto前沿在进化过程中的移动距离判断是否终止优化,如果当前代的归一化Pareto前沿与前50代相比,移动距离小于0.3%,则优化停止。优化过程中Pareto前沿的变化情况如图10所示,每隔50代绘制一次前沿曲线,第500代相比于450代的Pareto前沿移动距离为0.27%,判断为收敛,停止优化。最终得到Rwg1、Rwg2、Rwg3和Re1优化后的结果见表3。
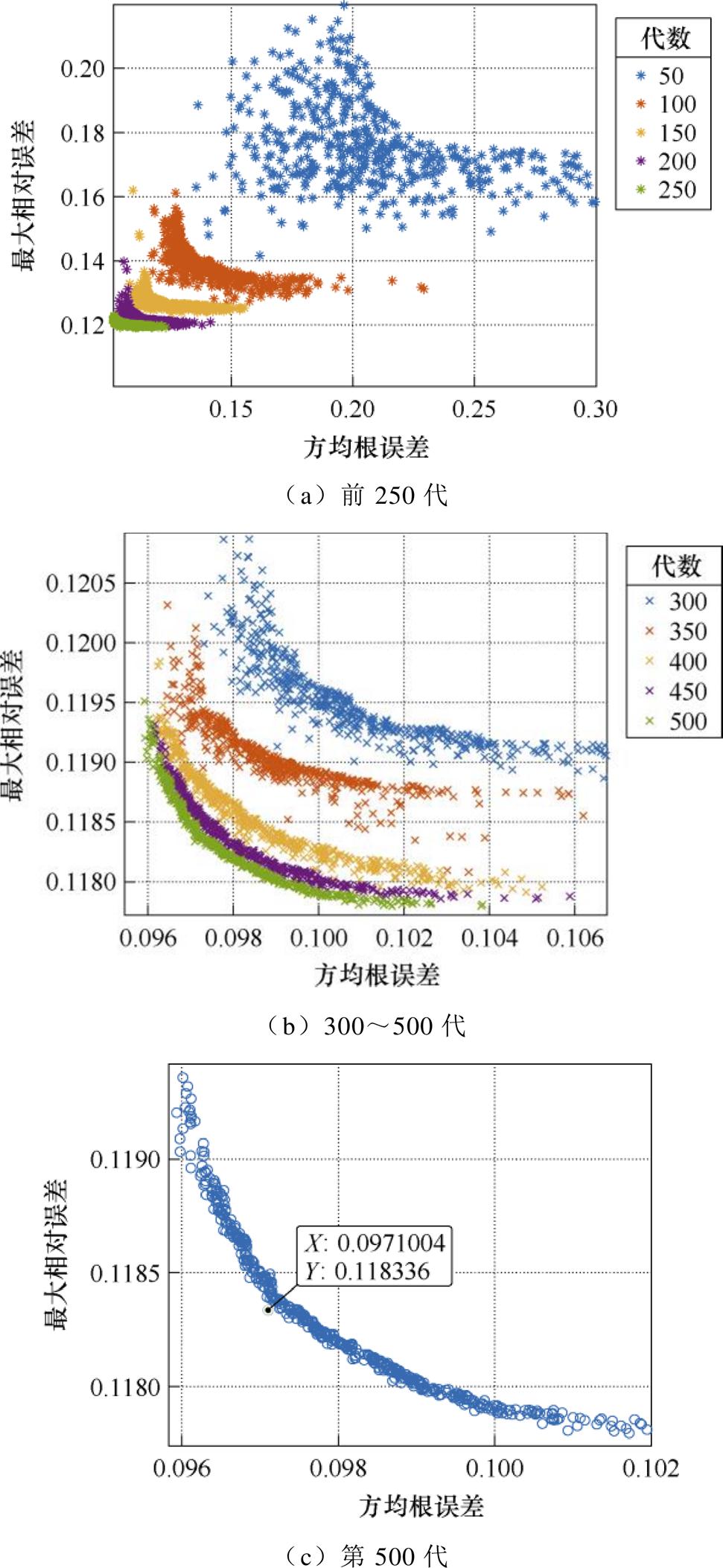
图10 优化过程中Pareto前沿误差的变化情况
Fig.10 Changes in the Pareto front error during the optimization process
基于本文提出的建模方法,搭建轴承电压仿真模型如图11所示。同时,按照文献[12, 19]的建模方法进行建模,并与本文的方法进行对比,验证模型效果。为了表述清楚,定义文献[12, 19]中所提出的模型为模型1和2,模型1为采用RLC串联电路结构的集总参数模型,高频电容完全放置于中性点之后;而模型2在模型1的基础上,将绕组对定子铁心电容、绕组对转子电容和定子铁心高频电阻各分成两部分,并在模型中添加了表征涡流损耗效应的电阻。以本文实验电机为研究对象,按照模型1和2中的方法进行建模,得到电机共模阻抗和相位曲线的仿真结果如图12所示。图12中黑色实线为实测的电机阻抗,本文建模方法的仿真结果如红色虚线所示,按照模型1和2建模方法得到的仿真结果分别如黄色和蓝色曲线所示。
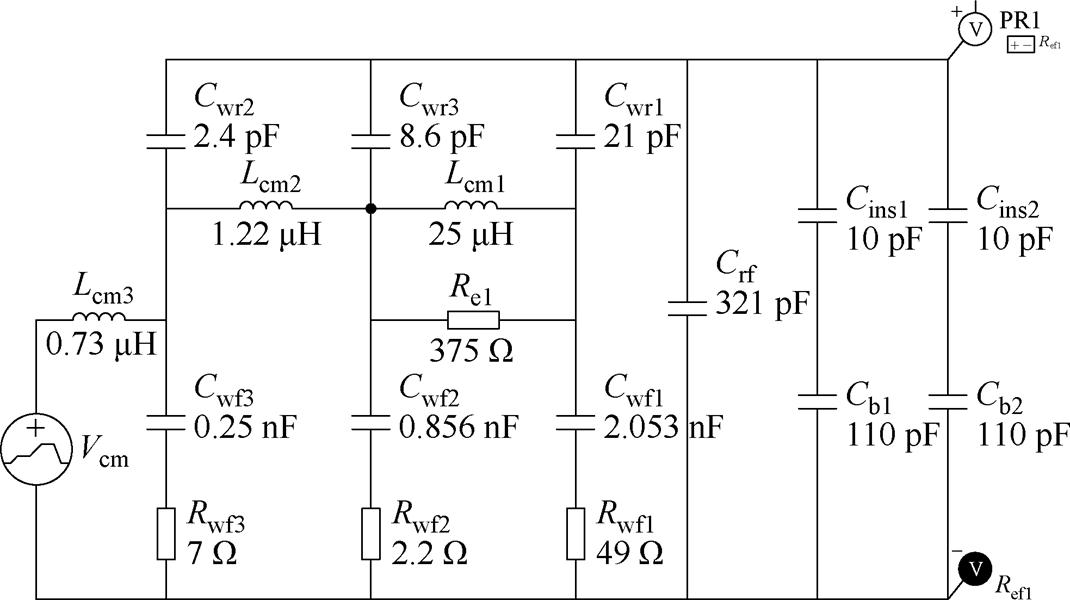
图11 本文提出的轴承电压模型仿真电路
Fig.11 The simulation circuit of the bearing voltage model proposed in this paper
图11的结果显示,模型1的集总参数电路仅能描述电机共模阻抗低频段特性,无法描述中频和高频段阻抗特性。这主要是由于集总参数模型电路本身存在局限性,寄生电容都集中在中性点之后,模型只能描述阻抗曲线1个谐振点的特性,无法描述中高频段的谐振特性。模型2提出的方法可以描述电机阻抗在低频和中频段的变化趋势,但当超过第一谐振点频率后,阻抗仿真结果存在一定误差,而且该模型无法准确描述阻抗在高频段的特性。这是由于模型2的电路结构只能描述3个阻抗谐振点特性,而且参数识别方法单纯依靠解析计算,这两方面原因造成以上仿真误差。
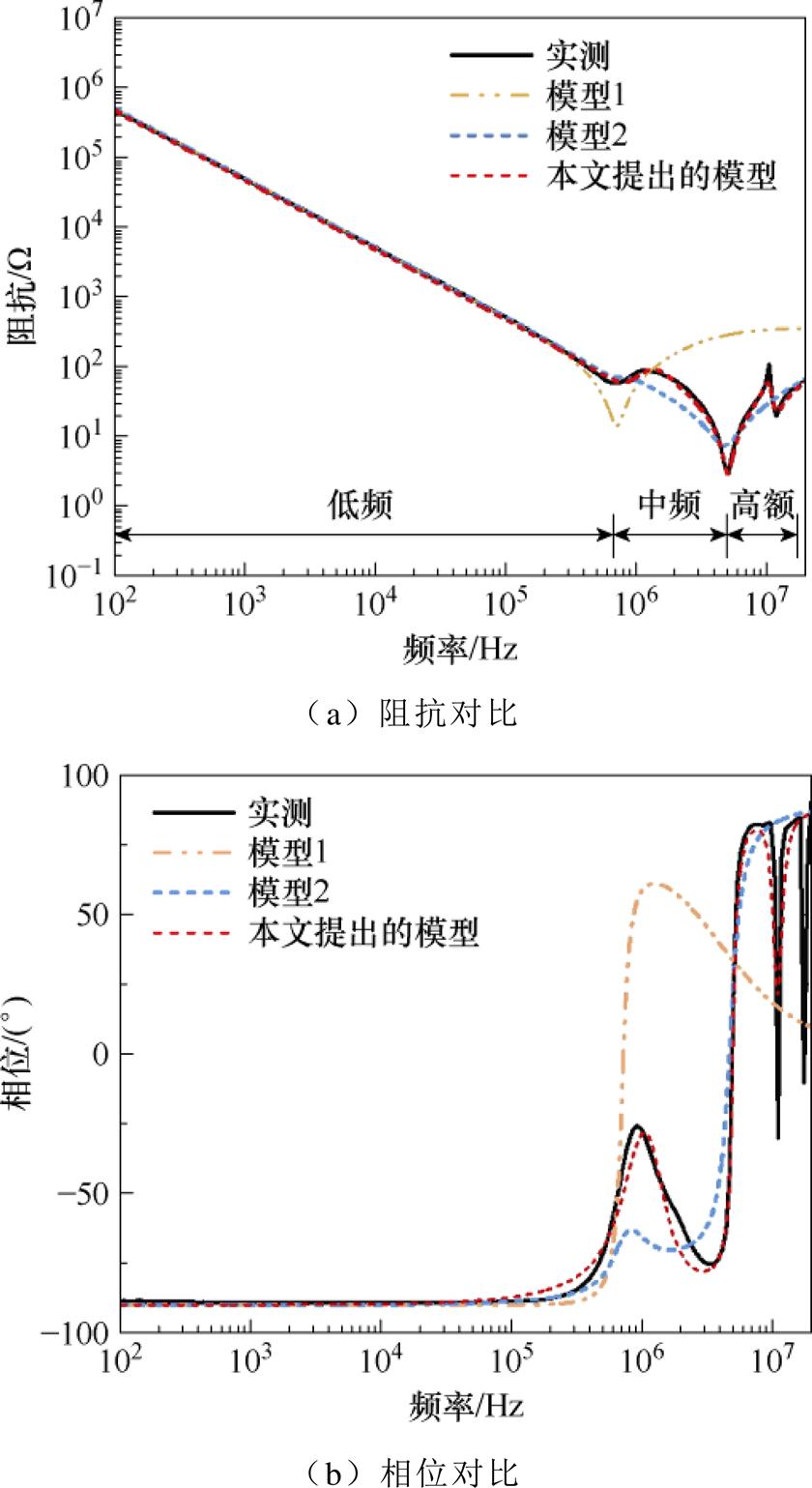
图12 共模阻抗的仿真与实测结果对比
Fig.12 Comparison between simulation and measurement results of common-mode impedance
本文提出的模型对电机共模阻抗的仿真效果最好。阻抗的仿真精度取决于模型结构和参数识别方法两方面,本文提出的模型将共模电感、绕组对机壳寄生电容、绕组对转轴寄生电容都分成三部分,可同时描述电机阻抗在低频、中频、高频段的特性;本文还采用解析计算和智能算法相结合的方法,提高了模型参数的识别精度,使模型在整个频率范围内都具有较好的阻抗仿真精度,尤其对各谐振点的谐振频率和谐振阻抗,仿真精度较好。此外,模型将阻抗频率的仿真范围拓宽至20 MHz,适合SiC电驱系统高频轴承电压的建模应用。
本文搭建了电机轴承电压测试平台验证模型的仿真效果。电机轴承电压测试平台如图13所示。实验电机和SiC电机控制器参数见表4,测量设备参数见表5。电机轴承型号为6004深沟球轴承,采用空间矢量脉宽调制(Space Vector Pulse Width Modu- lation, SVPWM)技术驱动电机,利用专用导电刷测量轴承电压[14]。
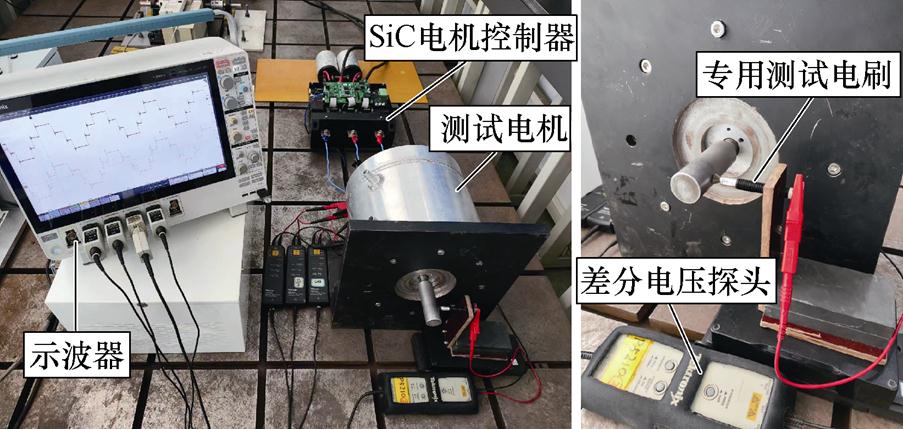
图13 电机轴承电压测试平台
Fig.13 The test platform of motor bearing voltage
表4 实验电机和SiC电机控制器参数
Tab.4 The parameters of experimental motor and SiC motor controller
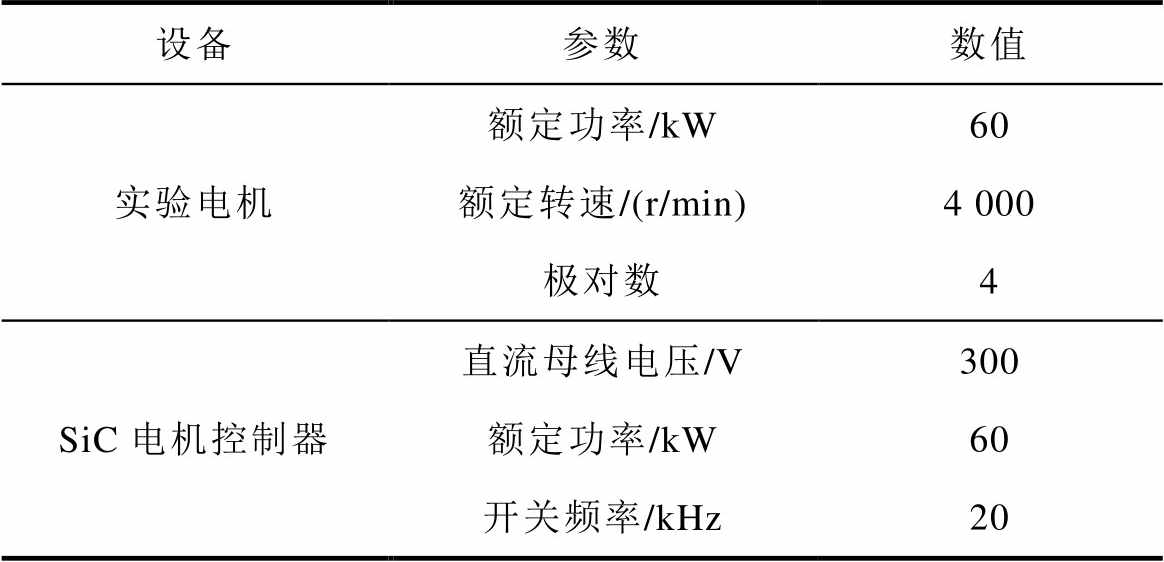
设备参数数值 实验电机额定功率/kW60 额定转速/(r/min)4 000 极对数4 SiC电机控制器直流母线电压/V300 额定功率/kW60 开关频率/kHz20
表5 测量设备参数
Tab.5 The parameters of measurement equipment
设备型号参数 示波器MSO56 5-BW-10001 GHz, 6.25 GS/s 阻抗分析仪E4990A100 Hz~20 MHz 差分电压探头THDP02001 500 V/200 MHz
电机空载运行,为了避免轴承温度对测试结果的影响,实验中轴承外圈温度始终保持在22~27℃。在电机转速nr分别为500、2 000和3 500 r/min的工况下,分别测量轴承电压Vb和电机共模电压Vcm。将测量的Vcm数据作为仿真电压源,采用图11所示电路对Vb进行仿真,得到Vb仿真与实验的对比结果如图14~图16所示。从图14~图16可以看出,Vb是典型的四电平阶梯波,但在控制器开关管开关瞬间,Vb波形存在电压尖峰。当Vb波形中稳定电压幅值超过轴承润滑脂油膜耐压阈值时,油膜会击穿放电;但Vb电压尖峰在短时间内超过油膜耐压阈值,也可能会造成油膜击穿,对轴承造成损害。因此,本文从Vb稳定幅值和电压尖峰两个角度考虑,对各模型的仿真效果进行评价。
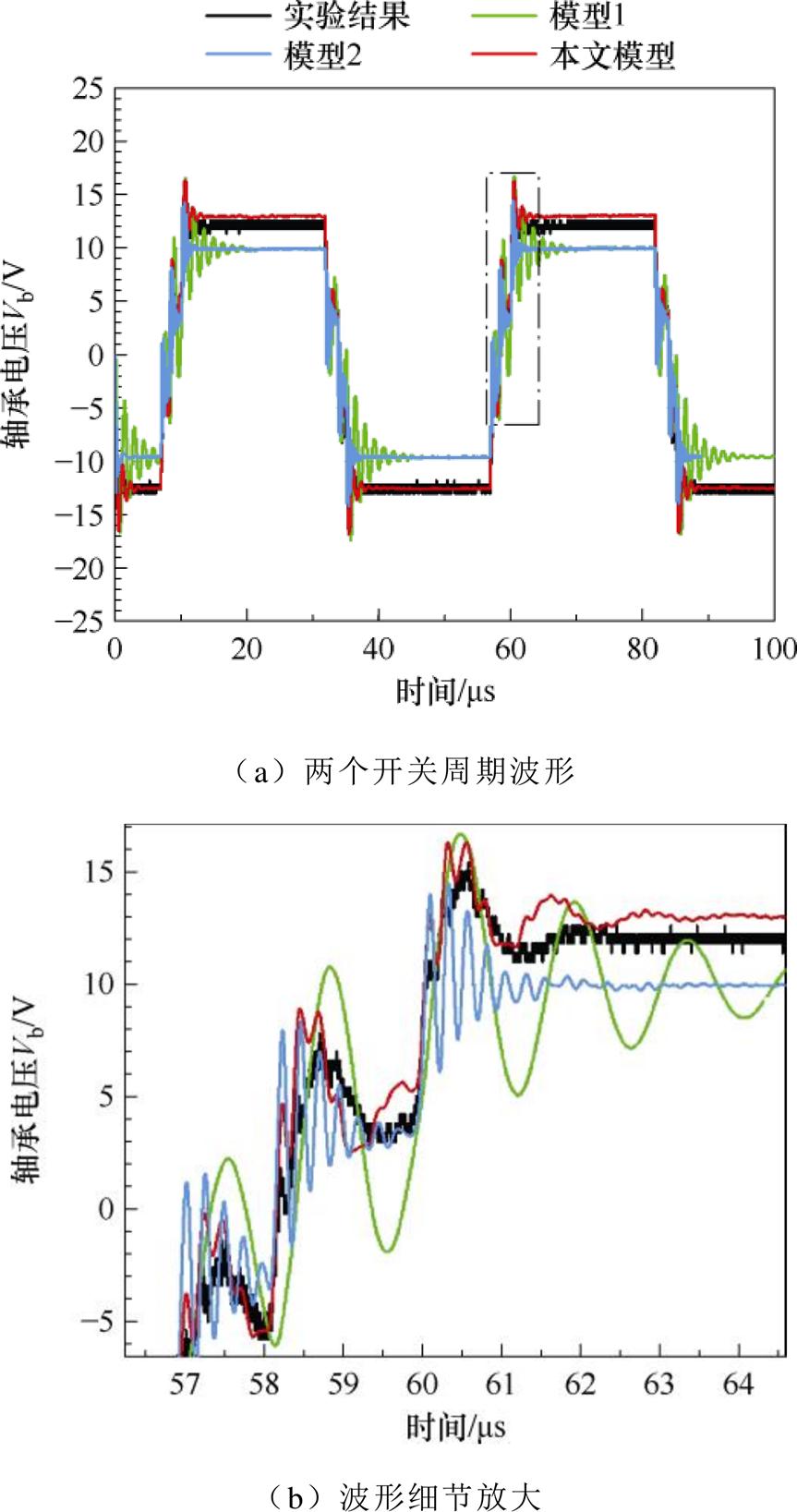
图14 轴承电压仿真与实验结果(nr=500 r/min)
Fig.14 The simulation and experimental results of bearing voltage (nr=500 r/min)
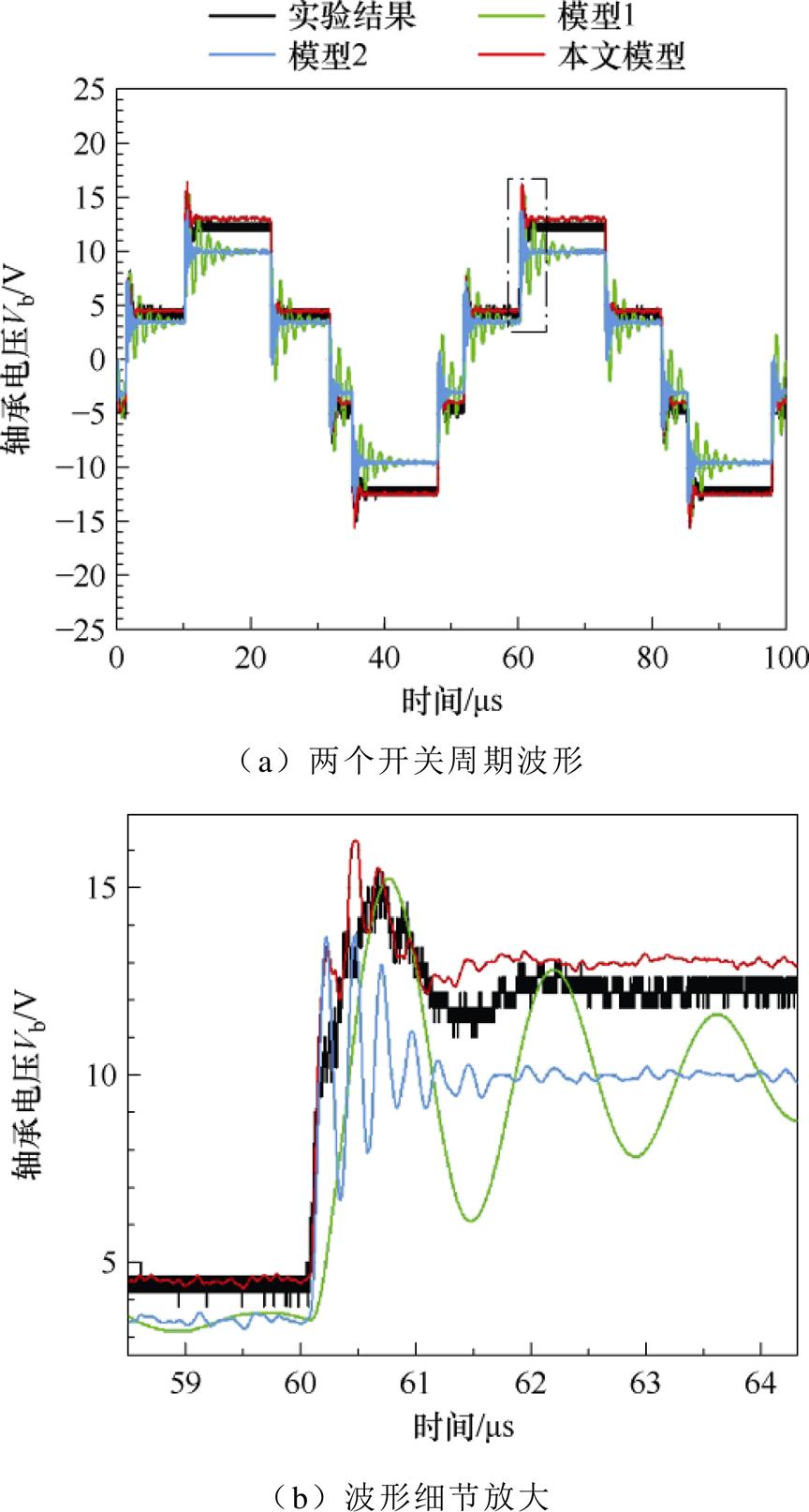
图15 轴承电压仿真与实验结果(nr=2 000 r/min)
Fig.15 The simulation and experimental results of bearing voltage (nr=2 000 r/min)
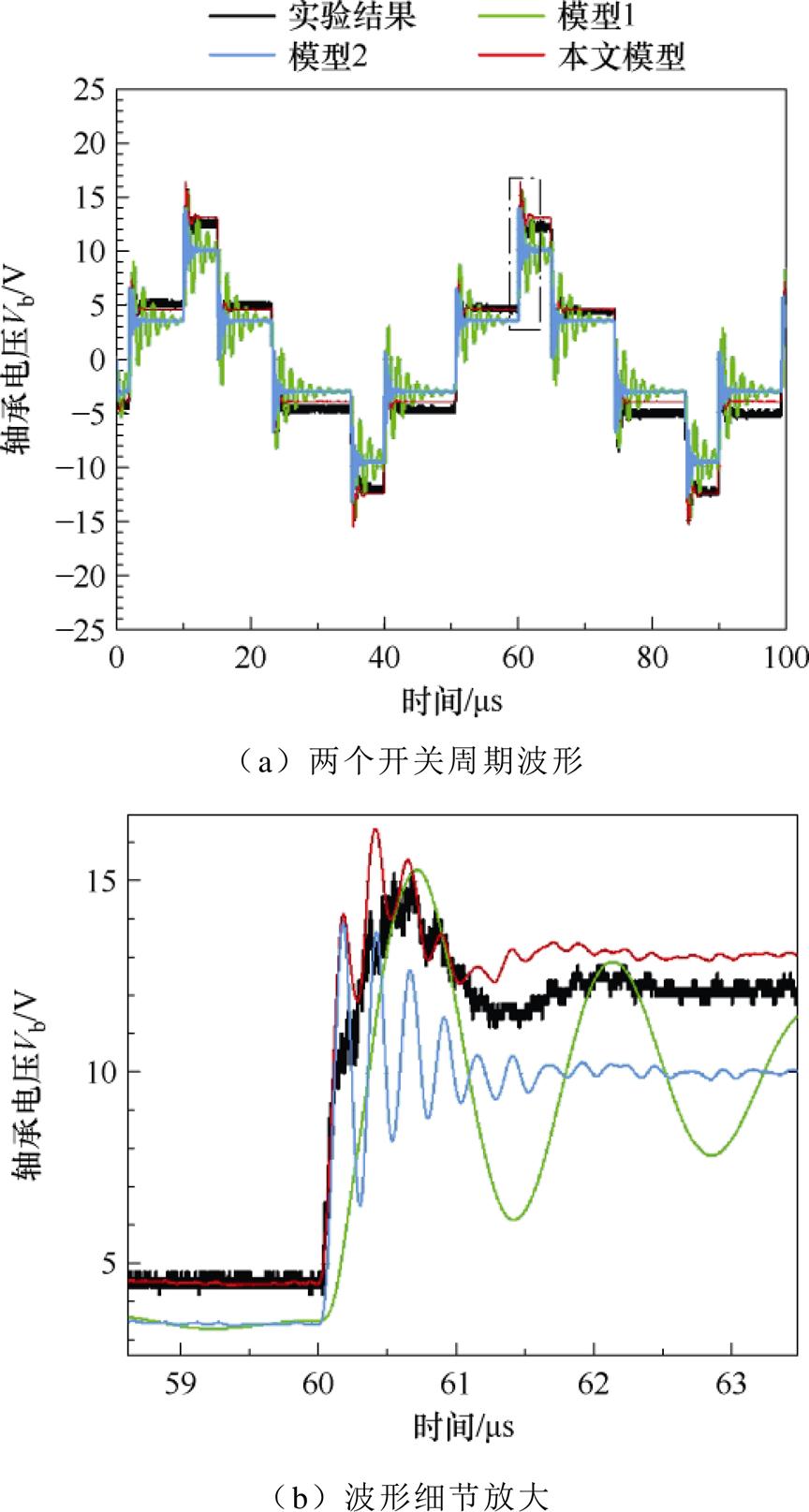
图16 轴承电压仿真与实验结果(nr=3 500 r/min)
Fig.16 The simulation and experimental results of bearing voltage (nr=3 500 r/min)
根据图14~图16,随转速升高,调制比逐渐增加,SVPWM策略中有效矢量的作用时间变大,零矢量作用时间变短,使得Vb波形的四电平阶梯波特征更明显,Vb的四个电平分别为±Vb/6和±Vb/2。图14~图16中,Vb存在低频波动,导致电压不是严格以0 V为中心对称的,该低频波动来自50 Hz电网电压、整流器输出的150 Hz谐波电压以及SVPWM策略产生的3倍调制频率的谐波电压。尽管这些低频波动幅值小,但会导致Vb波形整体存在低频起伏。在实验测量过程中,这些低频波动无法避免,但其对Vb幅值(正向稳定电压和负向稳定电压之差)无影响。鉴于此,本文后续分析以该幅值参数作为评估模型仿真精度的依据。
实验电机轴承外圈安装有绝缘衬套,基于图7所示的本文高频模型,轴承电容Cb1和Cb2分别与绝缘衬套电容Cins1和Cins2串联。Vb为测量转轴与机壳获得的电压,即Cb1、Cb2和Cins1、Cins2串联后的电容网络端电压,如图11所示。随转速变化,虽然轴承润滑油膜厚度的变化会影响轴承电容大小,但根据表3,相对于Cb1和Cb2,Cins1和Cins2容值较小,串联后的总电容由Cins1和Cins2主导,因此转速对Vb幅值的影响很小。以上分析与实验结果一致,从图14~图16可以看出,不同转速下实测的Vb稳定幅值一直保持在24.5 V,可忽略转速的影响。进一步对比模型之间的仿真精度,图14~图16中,模型1和2仿真得到的Vb稳定幅值均为20 V,与实验结果之间的误差较大,误差达到4.5 V(18.4%);本文提出的建模方法对于Vb的仿真效果最好,仿真得到的Vb稳定幅值为25.7 V,仿真误差为1.2 V(5%)。
对于Vb尖峰电压的仿真误差如图17所示,尖峰电压定义为Vb电压峰值与稳定幅值之间的差值。模型1的仿真误差最大,最大仿真误差为93%,模型2有所改善,但最大仿真误差仍达到22%,本文提出的模型最大仿真误差仅为8.6%。此外,相比于2 000 r/min和3 500 r/min,500 r/min时所有模型的尖峰电压仿真误差略高,对该现象进行分析:低转速对应低调制比,Vb四电平阶梯波的电压特征不明显,±Vb/6电平的持续时间短,产生的尖峰电压还未完全衰减,直接跳变到±Vb/2电平时,与该电平的开关尖峰电压重合,导致500 r/min时的Vb峰值要略高于其他转速工况。而三个模型对电机共模阻抗的描述精度都随频率增加而逐渐降低,这些原因导致图17中三个模型对500 r/min时的高频尖峰电压的仿真误差略高于其他转速工况。
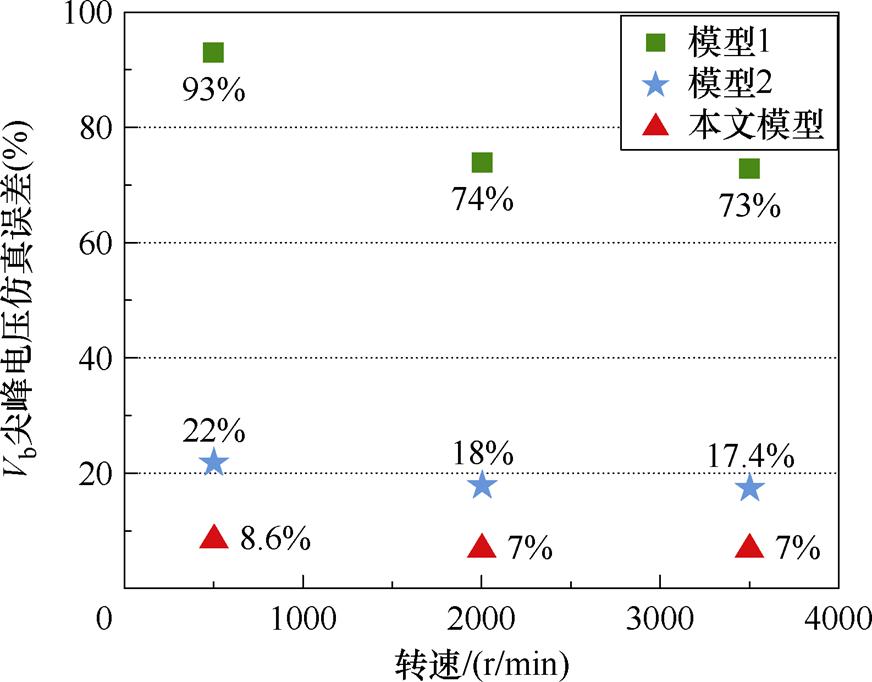
图17 Vb尖峰电压仿真误差
Fig.17 Voltage spike simulation error of Vb
根据图14~图16,模型1对于Vb尖峰电压振荡频率和峰值的仿真结果,与实测结果差距最大,这是由于模型1的集总参数电路无法准确描述电机共模阻抗中频、高频段特性,具体参见图12所示。模型2对Vb电压尖峰振荡频率的仿真结果与实测结果存在一定误差,其误差来源主要在于两方面:一方面,模型2的电路结构本身无法描述图12中阻抗的高频段特性;另一方面,模型2单纯依靠解析计算进行参数识别,参数识别结果存在一定误差,模型精度不够和参数识别方法单一最终导致Vb电压尖峰值和振荡频率仿真的不准确。本文模型的电路结构可同时兼顾低、中、高频阻抗的仿真精度,模型参数识别采用解析计算和优化算法相结合的策略,这些措施提升了模型的仿真精度。最终,得到模型之间的对比结果见表6。
表6 各模型之间的仿真效果对比
Tab.6 The comparison of simulation results between different models
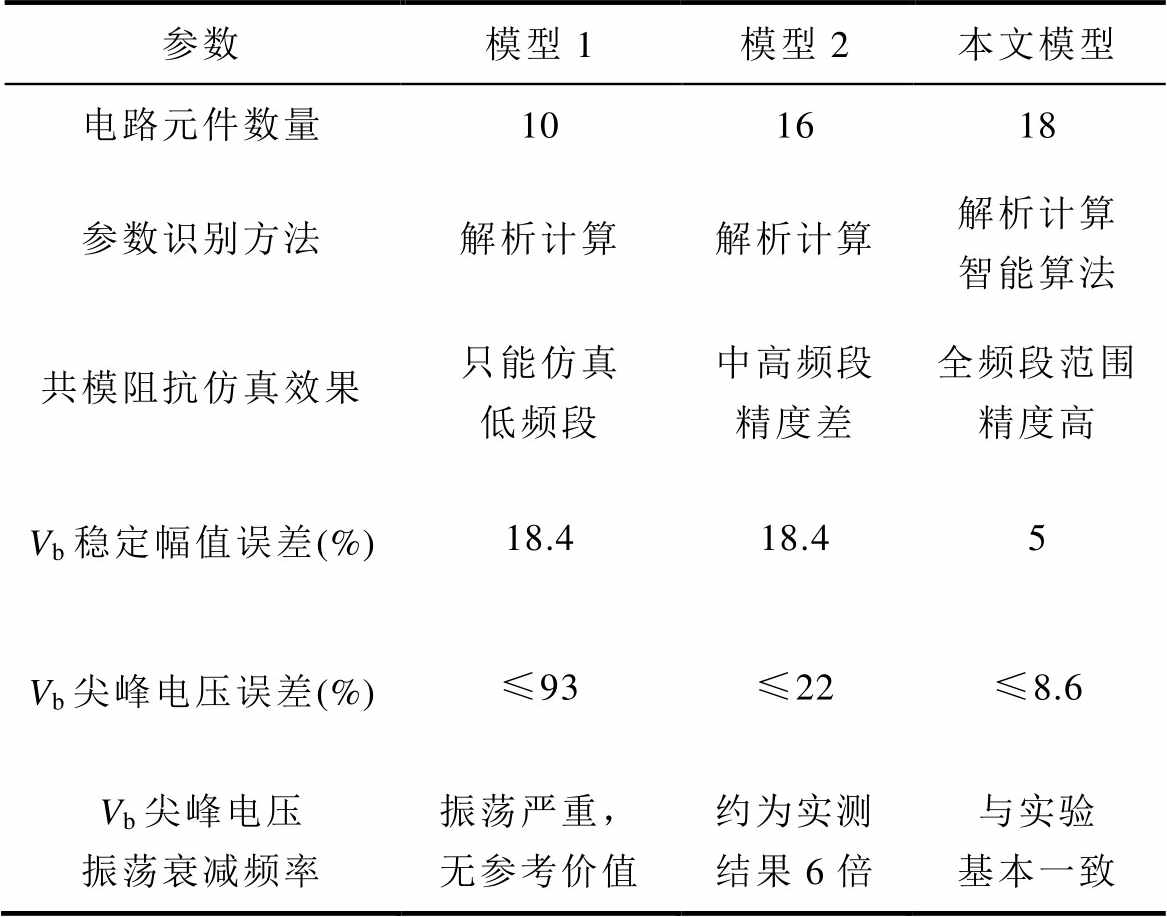
参数模型1模型2本文模型 电路元件数量101618 参数识别方法解析计算解析计算解析计算智能算法 共模阻抗仿真效果只能仿真低频段中高频段精度差全频段范围精度高 Vb稳定幅值误差(%)18.418.45 Vb尖峰电压误差(%)≤93≤22≤8.6 Vb尖峰电压振荡衰减频率振荡严重,无参考价值约为实测结果6倍与实验基本一致
对本文建模方法的仿真误差进行分析,实验环境温度和湿度无明显变化,实验设备带宽均满足测量需求,所有测量探头均进行精准调零和相位同步测试,以上因素对实验结果的影响可忽略。仿真和实验的误差主要来自模型本身,根据图12,相比于模型1和2,虽然本文模型对共模阻抗的描述精度有所提高,但对于共模阻抗曲线中、高频段阻抗和谐振点附近阻抗的仿真仍然存在一定误差,这进一步导致Vb的仿真和实验结果存在一定差距。但本文模型的仿真精度均小于10%,满足实际应用中Vb的仿真需求,可用于评估电机轴承电压水平,为抑制方法研究提供模型支撑。
本文对IPMSM端口阻抗特性进行分析,提出一种基于分布参数电路结构的轴承电压建模方法和参数识别方法,并与其他模型进行对比。仿真和实验结果验证了本文所提出模型的准确性,得到结论如下:
1)与感应电机不同,IPMSM差模阻抗特性的低频段与转子位置有关,在模型参数识别过程中需要考虑该影响;共模阻抗特性,以及绕组对转子、转轴对机壳的阻抗特性与转子位置无关。
2)传统轴承电压模型由于模型结构的局限性和参数识别方法的单一性,对共模阻抗中、高频段的仿真存在较大误差;本文提出的模型根据实际阻抗曲线特征灵活确定电路结构,可描述共模阻抗在全频段内的变化趋势,为确保轴承电压仿真的准确性奠定基础。
3)本文提出的解析计算与智能优化相结合的方法,提高了模型参数识别的准确性,增强了模型仿真精度。所提出的模型对于轴承电压稳定幅值、尖峰电压峰值和振荡频率都具有较高的仿真精度,轴承电压稳定幅值仿真误差为5%,尖峰电压最大仿真误差为8.6%。模型有助于工程上评估轴承电压的影响,为抑制方法研究提供模型支撑。
未来工作:基于本文模型,进行轴承电压抑制方法的研究。此外,将本文模型与控制器控制参数和电机尺寸参数建立关系,将轴承电压作为电驱系统的设计指标之一,优化控制器和电机的设计参数。
参考文献
[1] 迟连强, 张殿海, 赵俊清, 等. 旋转电机轴承电蚀损伤机理与缓解措施研究进展[J]. 电工技术学报, 2024, 39(20): 6409-6430.
Chi Lianqiang, Zhang Dianhai, Zhao Junqing, et al. Research progress on the mechanism and mitigation measure of electrical corrosion damage in rotating motor bearings[J]. Transactions of China Electro- technical Society, 2024, 39(20): 6409-6430.
[2] Weicker M, Binder A. Characteristic parameters for electrical bearing damage[C]//2022 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Sorrento, Italy, 2022: 785-790.
[3] He Feng, Xie Guoxin, Luo Jianbin. Electrical bearing failures in electric vehicles[J]. Friction, 2020, 8(1): 4-28.
[4] 李知浩, 刘瑞芳, 张亮亮, 等. 绝缘轴承对变频电机高频轴电流的抑制机理与效果[J]. 电工技术学报, 2024, 39(4): 1046-1058.
Li Zhihao, Liu Ruifang, Zhang Liangliang, et al. The suppression mechanism and effects of insulated bearings on high frequency bearing current[J]. Transactions of China Electrotechnical Society, 2024, 39(4): 1046-1058.
[5] 鲍晓华, 王硕, 关博凯, 等. 基于Mel-CNN和电流频谱的电机轴承外圈故障声纹检测方法[J]. 电机与控制学报, 2024, 28(11): 68-80.
Bao Xiaohua, Wang Shuo, Guan Bokai, et al. Voiceprint detection method for motor bearing outer ring fault based on Mel-CNN and current spectrum[J]. Electric Machines and Control, 2024, 28(11): 68-80.
[6] Tombul Y, Zhang Jian, Andert J. High-frequency modeling of bearing and transmission currents in electric vehicles[C]//2024 International Conference on Electrical Machines (ICEM), Torino, Italy, 2024: 1-6.
[7] 鞠孝伟, 张凤阁, 程远, 等. 车用驱动电机扁线绕组关键问题研究综述[J]. 中国电机工程学报, 2024, 44(15): 6181-6199.
Ju Xiaowei, Zhang Fengge, Cheng Yuan, et al. Overview of key issues of flat wire winding of traction motor for electric vehicles[J]. Proceedings of the CSEE, 2024, 44(15): 6181-6199.
[8] 郭伟力, 肖国春, 王来利, 等. 碳化硅功率模块在键合线失效条件下的混合电流传感器抗干扰优化研究[J]. 电工技术学报, 2025, 40(22): 7276-7288.
Guo Weili, Xiao Guochun, Wang Laili, et al. Anti- interference optimization study of a hybrid current sensor for silicon carbide power modules under bonding wire failure conditions[J]. Transactions of China Electrotechnical Society, 2025, 40(22): 7276- 7288.
[9] Wen Feng, Yuan J, Wickramasinghe K S, et al. Epitaxial Al-InAs heterostructures as platform for Josephson junction field-effect transistor logic devices[J]. IEEE Transactions on Electron Devices, 2021, 68(4): 1524-1529.
[10] Ruiz-Sarrio J E, Chauvicourt F, Gyselinck J, et al. Impedance modeling oriented toward the early prediction of high-frequency response for permanent magnet synchronous machines[J]. IEEE Transactions on Industrial Electronics, 2023, 70(5): 4548-4557.
[11] Boucenna N, Costa F, Hlioui S, et al. Strategy for predictive modeling of the common-mode impedance of the stator coils in AC machines[J]. IEEE Transa- ctions on Industrial Electronics, 2016, 63(12): 7360- 7371.
[12] 陈立珂, 刘瑞芳, 李知浩, 等. 电缆参数对变频驱动电机轴电压和轴电流的影响[J]. 电工技术学报, 2024, 39(15): 4755-4766, 4793.
Chen Like, Liu Ruifang, Li Zhihao, et al. The influence of cable parameters on the bearing voltage and bearing current of the variable frequency drive motor[J]. Transactions of China Electrotechnical Society, 2024, 39(15): 4755-4766, 4793.
[13] Feng Yixiong, Ji Ruosong, Hong Zhaoxi, et al. Analytical optimization of the bearing voltage of motor considering the thickness of insulating coating: an improved equivalent circuit model[J]. IEEE Sensors Journal, 2022, 22(19): 18567-18579.
[14] 白保东, 刘威峰, 王禹, 等. PWM驱动感应电机轴电压轴承电流[J]. 电工技术学报, 2013, 28(增刊2): 434-440.
Bai Baodong, Liu Weifeng, Wang Yu, et al. PWM driving induction motor shaft voltage bearing current[J]. Transactions of China Electrotechnical Society, 2013, 28(S2): 434-440.
[15] Muetze A, Binder A. Calculation of motor capa- citances for prediction of the voltage across the bearings in machines of inverter-based drive systems[J]. IEEE Transactions on Industry Appli- cations, 2007, 43(3): 665-672.
[16] Magdun O, Binder A. High-frequency induction machine modeling for common mode current and bearing voltage calculation[J]. IEEE Transactions on Industry Applications, 2014, 50(3): 1780-1790.
[17] Heidler B, Brune K, Doppelbauer M. High-frequency model and parameter identification of electrical machines using numerical simulations[C]//2015 IEEE International Electric Machines & Drives Conference (IEMDC), Coeur d’Alene, ID, USA, 2015: 1221- 1227.
[18] Vidmar G, Miljavec D. A universal high-frequency three-phase electric-motor model suitable for the delta- and star-winding connections[J]. IEEE Transa- ctions on Power Electronics, 2015, 30(8): 4365-4376.
[19] 赵秦聪, 杨二乐, 刘瑞芳, 等. 一种变频供电感应电机高频轴电流建模方法[J]. 中国电机工程学报, 2021, 41(23): 8139-8148.
Zhao Qincong, Yang Erle, Liu Ruifang, et al. Modeling of high frequency bearing currents of induction motors powered by frequency converters[J]. Proceedings of the CSEE, 2021, 41(23): 8139- 8148.
[20] 刘瑞芳, 李知浩, 李照林, 等. 交流电机轴电流高频模型精确建模[J]. 电工技术学报, 2024, 39(22): 7019-7029.
Liu Ruifang, Li Zhihao, Li Zhaolin, et al. Accurate modeling of high frequency bearing currents in AC motors[J]. Transactions of China Electrotechnical Society, 2024, 39(22): 7019-7029.
[21] Peng Wenxin, Li Songnong, Wu Zhao, et al. High- frequency modeling of PMSM by the VF-PSO in electric vehicles[C]//2019 IEEE Sustainable Power and Energy Conference (iSPEC), Beijing, China, 2019: 2670-2674.
[22] Jia Kelin, Bohlin G, Enohnyaket M, et al. Modelling an AC motor with high accuracy in a wide frequency range[J]. IET Electric Power Applications, 2013, 7(2): 116-122.
[23] 汪泉弟, 张飞, 彭河蒙, 等. 基于向量拟合法的永磁同步电机EMI高频模型[J]. 电工技术学报, 2015, 30(6): 77-84.
Wang Quandi, Zhang Fei, Peng Hemeng, et al. Permanent magnet synchronous AC motor EMI model based on vector-fitting[J]. Transactions of China Electrotechnical Society, 2015, 30(6): 77-84.
[24] Cai Minyu, Craddock T, Wasynczuk O. High- frequency modeling, parameterization, and simulation of IPM motor drive systems[C]//2017 IEEE Power and Energy Conference at Illinois (PECI), Champaign, IL, USA, 2017: 1-8.
[25] Magdun O, Gemeinder Y, Binder A. Prevention of harmful EDM currents in inverter-fed AC machines by use of electrostatic shields in the stator winding overhang[C]//IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 2010: 962-967.
[26] Schinkel M, Weber S, Guttowski S, et al. Efficient HF modeling and model parameterization of induction machines for time and frequency domain simu- lations[C]//Twenty-First Annual IEEE Applied Power Electronics Conference and Exposition, 2006. APEC'06, Dallas, TX, USA, 2006: 1-6.
[27] 刘瑞芳, 娄卓夫, 马喜平, 等. 电机轴电流问题中轴承等效电容和电阻的计算模型[J]. 中国电机工程学报, 2014, 34(15): 2430-2437.
Liu Ruifang, Lou Zhuofu, Ma Xiping, et al. Modeling of bearing capacitance and resistance in motor bearing current problem[J]. Proceedings of the CSEE, 2014, 34(15): 2430-2437.
Abstract Bearing electrical corrosion has become an increasingly frequent issue, posing a critical problem that urgently needs to be addressed in high-power-density electric drive systems. A bearing voltage model is essential for studying bearing electrical corrosion to assess the level of electrical corrosion and explore potential mitigation methods. However, existing models lack sufficient accuracy. This paper proposes a modeling approach for motor bearing voltage based on port impedance characteristics to evaluate and mitigate bearing electrical erosion.
First, the testing method and results of the motor port impedance were presented using an impedance analyzer. An analysis of the motor port impedance characteristics was conducted to examine the impact of impedance parameters on bearing voltage modeling. Next, a high-frequency bearing voltage model was proposed utilizing a distribution-parameter circuit structure. This model allows flexible adjustment of the number of circuit units based on the series and parallel resonance points in the common-mode impedance curve, thereby extending the model’s frequency range and improving impedance simulation accuracy. The principles for determining the number of circuit units in the model were given. Subsequently, a parameter identification method combining analytical calculations with optimization algorithms was proposed. This method derives initial values for the model parameters through analytical calculations, then uses optimization algorithms to refine the resistance parameters. The analytical formulas for the model parameters and the optimization process were provided. Finally, a motor bearing voltage testing platform was constructed, and the experimental electrical parameters and specifications of the measuring equipment were given. Simulation and experimental validation were conducted using a 60 kW automotive three-phase permanent magnet synchronous motor as an example.
The simulation and experimental results are compared under operating conditions at motor speeds of 500, 2 000, and 3 500 r/min. Experimental results show that the proposed model accurately simulates common-mode impedance across the entire frequency range. The simulation error for the steady-state amplitude of the bearing voltage is 5%, while the maximum error for peak voltage is 8.6%. These results validate the good consistency between the simulation and experimental data. Therefore, the proposed model can be used to evaluate motor bearing voltage levels and provide a reliable foundation for research on suppression methods.
Unlike induction motors, the differential-mode impedance characteristics of interior permanent magnet synchronous motors depend on the rotor position at low frequencies, which must be taken into account during the model parameter identification process. However, the common-mode impedance characteristics are independent of the rotor position. Traditional bearing voltage models, due to limitations in model structure and the simplicity of the parameter identification method, often exhibit significant errors when simulating common-mode impedance in the mid- and high-frequency ranges. The proposed model flexibly determines the circuit structure and can describe the variation of common-mode impedance across the entire frequency range. The model, combining analytical calculations and optimization algorithms, improves parameter identification accuracy and enhances simulation precision.
Keywords:Port impedance, bearing voltage, high-frequency model, distribution-parameter
中图分类号:TM341
DOI: 10.19595/j.cnki.1000-6753.tces.242305
黑龙江省教育厅双一流建设资助项目(LJGXCG2022-065)。
收稿日期 2024-12-17
改稿日期 2025-03-25
杨明亮 男,1993年生,博士研究生,研究方向为新能源汽车高压碳化硅电驱系统轴承电腐蚀问题。
E-mail: 1192961493@qq.com
程 远 男,1979年生,教授,博士生导师,研究方向为电机设计与优化、新能源汽车电驱动系统、整车能量管理、电机及驱动系统数字孪生等。
E-mail: chengyuan@hit.edu.cn(通信作者)
(编辑 郭丽军)