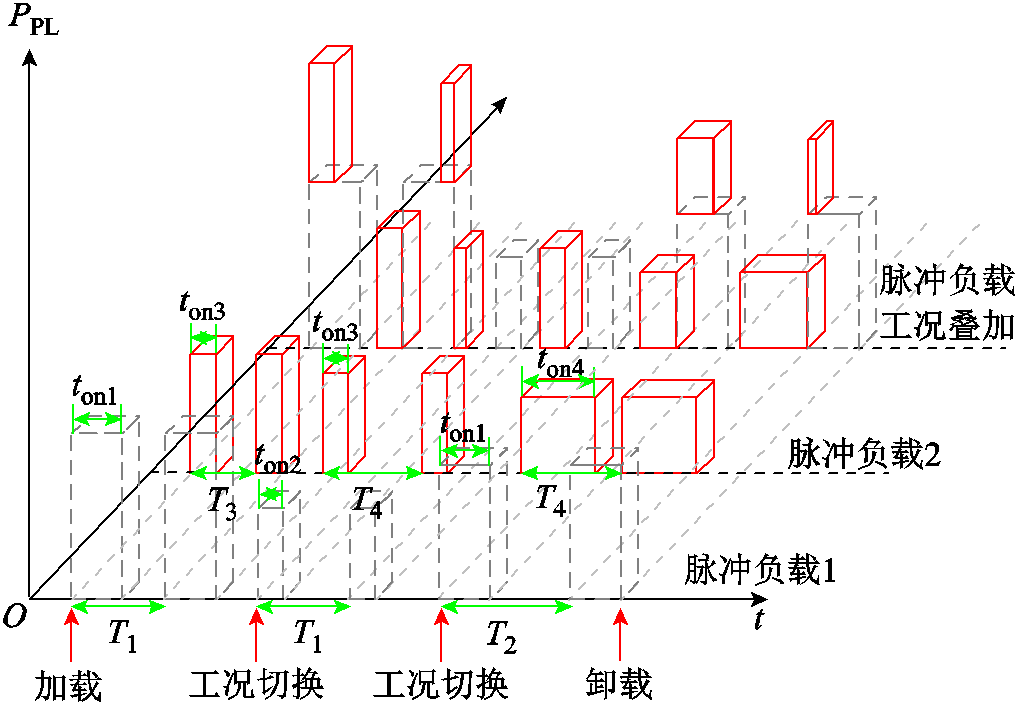
图1 脉冲负载瞬时功率波形
Fig.1 Instantaneous power waveforms of pulse load
摘要 具有高幅值、短周期特性的强电磁脉冲负载工作时会对舰船综合电力系统产生瞬时大功率冲击影响,严重时会造成柴油发电机组解列停机。针对这一问题,该文首先分析了强电磁脉冲负载与柴油发电机组之间的失配机理,确定了直流供电电源应采用多目标控制策略以满足柴油发电机组响应特性及脉冲负载电能需求指标,并对满足控制目标约束条件的电源硬件关键参数进行设计;其次,为保证直流供电电源在不同工况下均具有最优控制性能,以其状态空间方程为基础构建预测模型,并对目标函数进行最优化求解,从而得到最优控制序列;然后,根据交流侧功率变化率与负载端电压波动之间的耦合关系,设计了一种基于模型预测-功率参考值自适应的多目标控制策略;最后,通过半实物仿真及动模实验平台对所提控制策略的有效性和可靠性进行了验证。结果显示,该控制策略可限制交流侧功率变化率并使支撑电容电压在合理范围内波动,适用于不同负载工况对柴油发电机组的功率冲击问题,对提升搭载脉冲负载的舰船综合电力系统稳定性具有实际意义。
关键词:舰船综合电力系统 脉冲负载 冲击功率平抑 多目标模型预测控制 参考值自适应
我国的“十四五”规划和2035年远景目标强调了大力发展船舶与海洋工程装备的重要性。如雷达、声呐、电磁弹射等强电磁脉冲负载已成为船舶制造中的关键装备,其功率冲击问题成为桎梏船舶技术发展的瓶颈。特别是舰船综合电力系统搭载的雷达型脉冲负载,其工况复杂且随机,具有高频、高幅值、连续周期性的工作特点[1-3],会对舰船综合电力系统产生瞬时功率冲击。由于其源端柴油发电机组调速系统难以快速响应瞬时大功率冲击[4],使转子转速波动,进而导致频率波动过大,机组解列停机,严重威胁舰船综合电力系统的稳定运行[5-6]。因此,有必要开展针对强电磁脉冲负载功率冲击抑制策略的研究。
舰船综合电力系统中脉冲负载表现出“强荷”特性,而柴油发电机组则表现出“弱源”特性,已有文献针对两者之间工作特性的差异进行了研究。文献[7]建立柴油发电机组和脉冲负载仿真模型,通过改变脉冲负载的工作模式探究了峰值功率、工作周期和占空比对柴油发电机组的影响。文献[8]分别对不同周期、占空比下的脉冲负载进行并网(公网)/脱网(柴油机组)试验,讨论其对系统暂、稳态功率特性的影响。研究发现脉冲负载的瞬时大功率冲击与柴油发电机组响应之间存在不匹配问题。
现有文献围绕抑制舰船综合电力系统中脉冲负载引发的瞬时大功率冲击问题展开了部分研究。文献[9]设计了一种基于氮化镓的低阻抗交错并联Buck变换器,提高了Buck变换器的动态性能,维持了输出电压稳定。文献[10]提出一种Buck变换器的自适应阻尼比控制,在脉冲负载不同暂态过程实现稳定的输出电压调节。文献[11]设计了一种变论域模糊自适应PI控制器,通过仿真验证了变论域模糊PI控制可以有效减小脉冲负载造成的输出电压波动,但恢复稳态仍然需要较长的时间。上述文献只对输出电压这一单目标进行控制,并没有考虑过于稳定的电压反而会使功率冲击传递至交流侧,对柴油发电机组造成功率冲击。文献[12]提出了应用于脉冲负载的两级互联DC-DC变换器的供电结构,并对能量缓冲环节中的关键参数进行了设计,但是并没有根据控制目标及其约束条件进行关键参数设计。文献[13]提出了新型两级脉冲电源,前端变流器用于传输脉冲负载的平均功率并抑制输入电流的波动,后端变流器需要跟踪脉冲电流并保持恒定的输出电压。文献[14]提出了一种基于氮化镓的、采用输入前馈补偿控制的两级功率转换器,该转换器可使中间电容电压具有较大的变化范围。上述文献利用两级变换器作为平抑电路,虽然可以实现多目标控制,但是两级式电路的协调控制较困难,难以保证稳定性,且占用体积较大,使船舶空间更加紧张,同时也存在散热困难及经济性差等问题。
模型预测控制(Model Predictive Control, MPC)通过动态预测与滚动优化相结合的策略,实现最优化控制,可显著提升系统的控制性能[15-19]。文献[20]针对交错并联双向DC-DC变换器,提出基于粒子群优化算法的约束模型预测控制策略,提高了系统的响应速度与可靠性。文献[21]提出了一种基于模糊神经网络的模型预测控制,用于实现DC-DC升压变换器输出电压的快速瞬态响应。文献[22]针对直流微电网中常用的Buck型双向DC-DC变换器,提出一种基于残差生成器的改进电流补偿模型预测控制策略,显著提升了直流微电网的动态响应性能。现有研究针对DC-DC变换器的模型预测控制策略,主要聚焦提升其动态响应性能,而针对搭载脉冲负载场景下的功率冲击平抑控制研究仍存在明显空白。
因此,本文提出了一种基于模型预测-功率参考值自适应的多目标控制策略,在保证直流供电端电容电压在允许范围内波动的同时,实现了交流侧功率变化率的限制。具体工作内容如下:
首先,分析了脉冲负载与柴油发电机组之间的失配机理,明确了应采用多目标控制以满足柴油发电机组稳定运行及脉冲负载电能质量需求,并基于舰船综合电力系统拓扑与控制目标约束对直流供电电源硬件关键参数进行了设计。
其次,通过建立直流母线电压和四重Boost电路状态空间方程得到直流供电电源预测模型,并基于控制目标建立电源目标函数,获得其最优控制序列。
然后,为了解决脉冲负载对柴油发电机组的暂态功率冲击问题,设计了功率参考值自适应规则,限制了交流侧功率变化率,并允许支撑电容电压在合理范围内波动。
最后,提出了基于模型预测-功率参考值自适应的多目标控制策略。通过搭建半实物仿真及动模实验平台对所提控制策略在脉冲负载加/卸载、工况切换和叠加时平抑系统功率冲击的有效性进行验证。
本文主要以强电磁脉冲负载为研究对象,研究其特性及对舰船综合电力系统冲击的影响。脉冲负载瞬时功率波形如图1所示。图1中,PPL为脉冲负载瞬时功率,T1~T4对应不同的周期,ton1~ton4对应不同的脉冲持续时间。
图1 脉冲负载瞬时功率波形
Fig.1 Instantaneous power waveforms of pulse load
由图1可知,在脉冲负载加/卸载、工况切换及不同工况叠加等不同运行模式下,脉冲负载的功率幅值PPL(MW级)、周期T(ms级)和占空比Dp(0~1)等关键参数均存在显著差异。因此,脉冲负载对舰船综合电力系统的功率冲击会随着脉冲负载工况的改变而改变。
本文所用舰船综合电力系统架构如图2所示。图2中,①为柴油发电机组,为整个舰船综合电力系统提供能量;②为不控整流电路;③为直流母线;④为四重Boost供电电路,为单级变换器,采用多重Boost结构可以降低功率器件应力,减小电感电流纹波,单级交换器与两级变换器优势对比见附表1;⑤为脉冲负载,由于其负荷特性类似于直流开关负载的加/卸载作用,因此可采用开关器件串联电阻的方式进行等效。图2中,udc为直流母线电压,Ln为第n重电路电感,iLn为对应的第n重电路电感电流值,Cdc为直流母线电容,Cp为支撑电容,uCp为支撑电容电压,S为直流开关管,Rp为脉冲负载等效电阻。
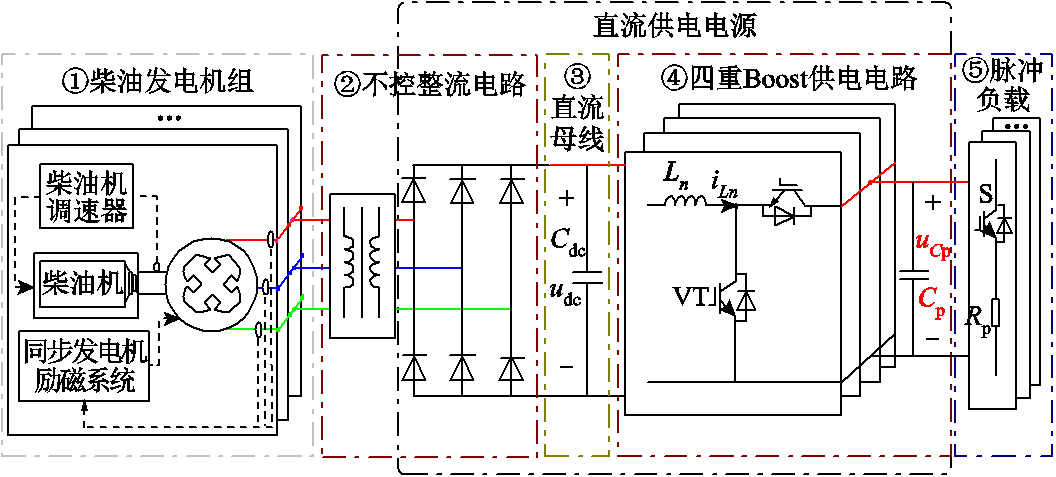
图2 舰船综合电力系统架构
Fig.2 Integrated power system architecture for naval ships
脉冲负载加/卸载、工况切换和工况叠加时因为工况改变会导致其负载功率瞬时突变,瞬时突变的功率冲击会超过柴油机组的调节能力,严重影响舰船综合电力系统的稳定运行。
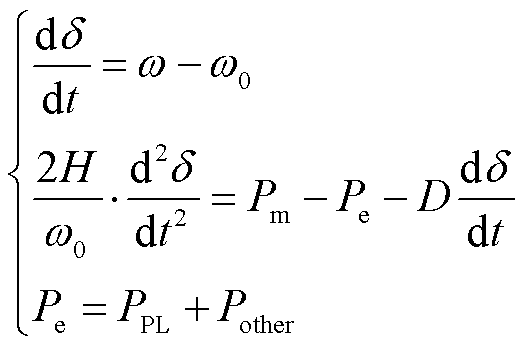
同步发电机转子运动方程为
 (1)
(1)
式中,δ为功角;ω为发电机转子角速度;ω0为电网额定同步角速度;H为转动惯量;Pm为机械功率;Pe为电磁功率;D为阻尼系数; 为因发热而损耗的功率。
为因发热而损耗的功率。
当脉冲负载暂态加/卸载、工况切换和工况叠加时,柴油发电机组需瞬时增大或减小有功功率PPL。由式(1)可知,PPL瞬时变化会引起电磁功率Pe变化,进而使柴油发电机组转子转速、频率发生波动。频率发生波动会影响电能质量,转子转速波动会增加机械部件的磨损而缩短其使用寿命,严重时会触发频率保护造成柴油发电机组脱机、舰船综合电力系统瘫痪。
由以上分析可知,应约束交流功率变化率,以保证柴油发电机组稳定运行。交流侧功率变化率受到约束降低后,当脉冲负载加载时,Boost电路输入功率缓慢上升,此时支撑电容应释放能量补充能量差额,从而导致uCp跌落;当脉冲负载卸载时,Boost电路输入功率缓慢下降,此时支撑电容应吸收能量,从而导致uCp上升。
支撑电容Cp应提供的能量差额为
 (2)
(2)
式中, 为支撑电容初始电压;∆W为电容吸收或释放的能量。
为支撑电容初始电压;∆W为电容吸收或释放的能量。
基于上述分析,考虑舰船综合电力系统用电需求指标,既要减小交流侧功率变化率以保证柴油发电机组稳定运行,又要使支撑电容电压在允许范围内波动以保证脉冲负载的供电精度需求。因此,确定电源控制目标为限制交流侧功率变化率,并允许支撑电容电压在合理范围内波动。如要实现上述控制目标,须对舰船综合电力系统储能元件参数和四重Boost电路的控制策略进行合理设计。
由1.1节可知,平抑脉冲负载对柴油机组的瞬时功率冲击,须限制交流功率变化率。因功率变化率限制而产生的能量差额应由支撑电容提供,所以要对支撑电容容量进行合理设计。支撑电容容量需根据系统能量关系和约束条件来设计。脉冲负载加/卸载时交流输入-支撑电容-脉冲负载能量关系如图3所示。
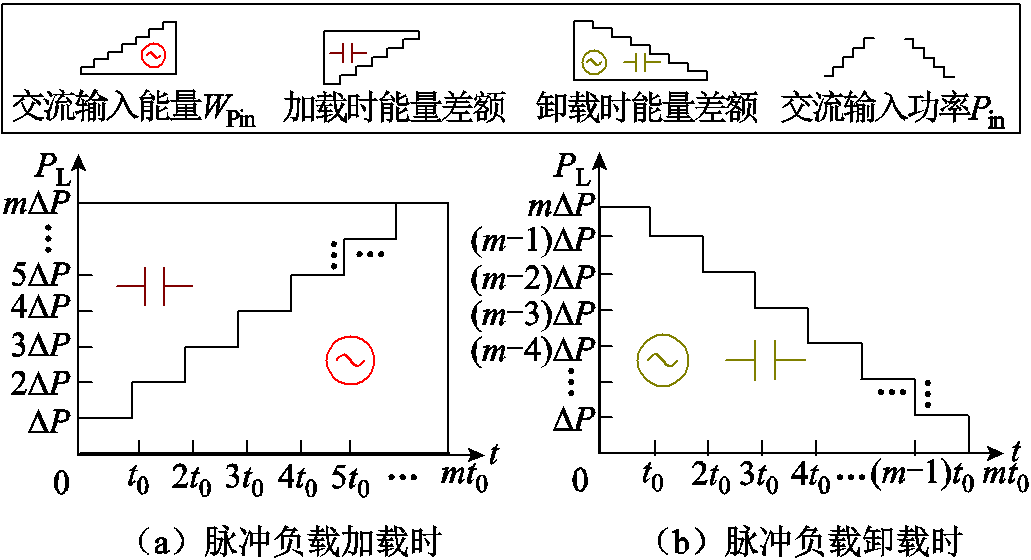
图3 交流输入-支撑电容-脉冲负载能量关系
Fig.3 Diesel engine-support capacitor-pulse load energy relationship
如图3a所示,当脉冲负载加载时,交流输入功率变化率应满足工程规定的限制值,即工频周期内不能大于工程规定的最大功率变化率。柴油机组输出的交流功率曲线Pin应呈如图3所示的阶梯状上升,此时支撑电容应提供由于交流功率变化率限制而产生的能量差额∆W。随着电容能量释放,其电容电压下降,而支撑电容电压的跌落要有最小临界值限制。因此,应基于两个限制条件对脉冲负载加载时的支撑电容容值进行设计。
脉冲负载平均功率计算式为
 (3)
(3)
式中,PL为脉冲负载各工况中最大平均功率。
由图3可知,交流输入功率Pin呈阶梯状上升,其表达式为
 (4)
(4)
式中,ΔPmax为工频周期内的最大允许交流输入功率增减量; 为单位阶跃函数;t0为工频周期;m为ΔPmax数量。
为单位阶跃函数;t0为工频周期;m为ΔPmax数量。
由式(2)~式(4)可知,脉冲负载的能量同时由式(2)即支撑电容能量和式(4)柴油机组发出能量提供,所以柴油机组-支撑电容-脉冲负载能量关系式为
 (5)
(5)
可得支撑电容电压与其约束为
 (6)
(6)
式中,uCp-min为支撑电容电压允许跌落最低值。当交流输入功率Pin等于脉冲负载功率PL时,支撑电容电压降到最低点uCp-min,此时为mt0时刻,电压应不低于最低值。将式(6)代入式(3)可得
 (7)
(7)
求解式(7)可知m与t为
 (8)
(8)
式中,[·]表示取整函数。
由式(6)可求得脉冲负载加载时满足约束的电容值Cp为
 (9)
(9)
同理,当脉冲负载卸载时交流输入-支撑电容-脉冲负载能量关系如图3b所示,交流输入功率呈阶梯状下降,同样在工频周期内不能大于工程规定的最大功率变化率。而此时脉冲负载不再需要能量,所以多余能量由支撑电容吸收,其能量关系式为
 (10)
(10)
由式(10)可得,支撑电容电压与其约束为
 (11)
(11)
式中,uCp-max为支撑电容电压允许上升最大值。当交流输入功率为0时,支撑电容电压达到最大值,此时支撑电容电压有最大值限制。由式(11)可得脉冲负载卸载时满足约束的电容值Cp为
 (12)
(12)
电感电流纹波率η计算式为
 (13)
(13)
式中,L1为第一重电感值;ΔiL1为第一重电感电流纹波;IL1为第一重电感电流;PB为单重Boost电路平均功率;Dpt为Boost电路占空比;fs为开关频率。若工程上要求电感电流纹波满足η≤ηL,则由式(13)有
 (14)
(14)
同理,Cdc取值也应以其电压纹波作为限制条件,则容值计算公式为
 (15)
(15)
式中, 为Boost电路重数;ηC为电容纹波率。
为Boost电路重数;ηC为电容纹波率。
在电源拓扑与储能元件参数确定的基础上,如要实现控制目标须对四重Boost电路的控制策略进行合理设计。模型预测控制可在脉冲负载工况发生变化时,通过动态预测与滚动优化相结合的策略,实现最优化控制,能够解决传统PI控制参数固定,难以适应不同脉冲负载工况的问题。
直流供电电源电路拓扑如图4所示。图4中,idc为整流输出电流,则直流母线电容电压状态空间方程为
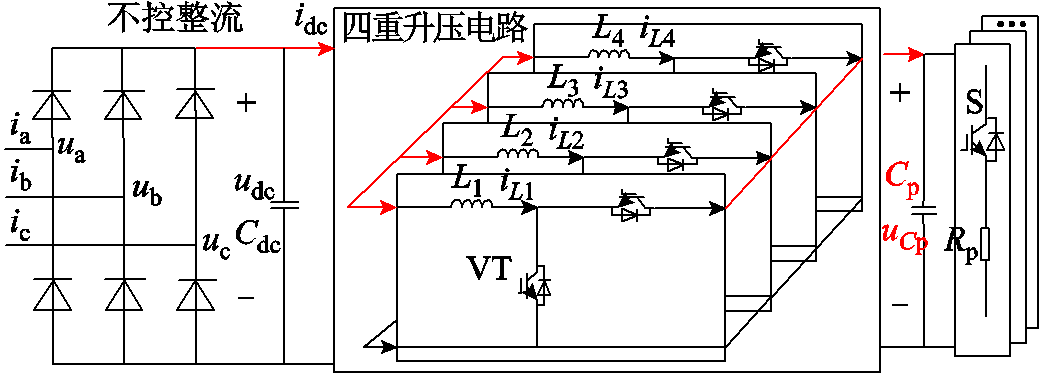
图4 直流供电电源电路拓扑
Fig.4 DC power supply circuit topology
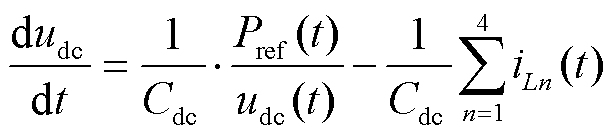 (16)
(16)
式中, 为功率参考值。
为功率参考值。
对式(16)进行离散化可得
 (17)
(17)
式中,Ts为离散步长;udc(k+1)、udc(k)分别为k+1时刻和k时刻直流母线电压;iLn(k)为k时刻第n重电感电流;Pref(k)为k时刻功率参考值。
本文基于第n重Boost电路进行建模,则第n重Boost电路不同模式等效示意图如图5所示。
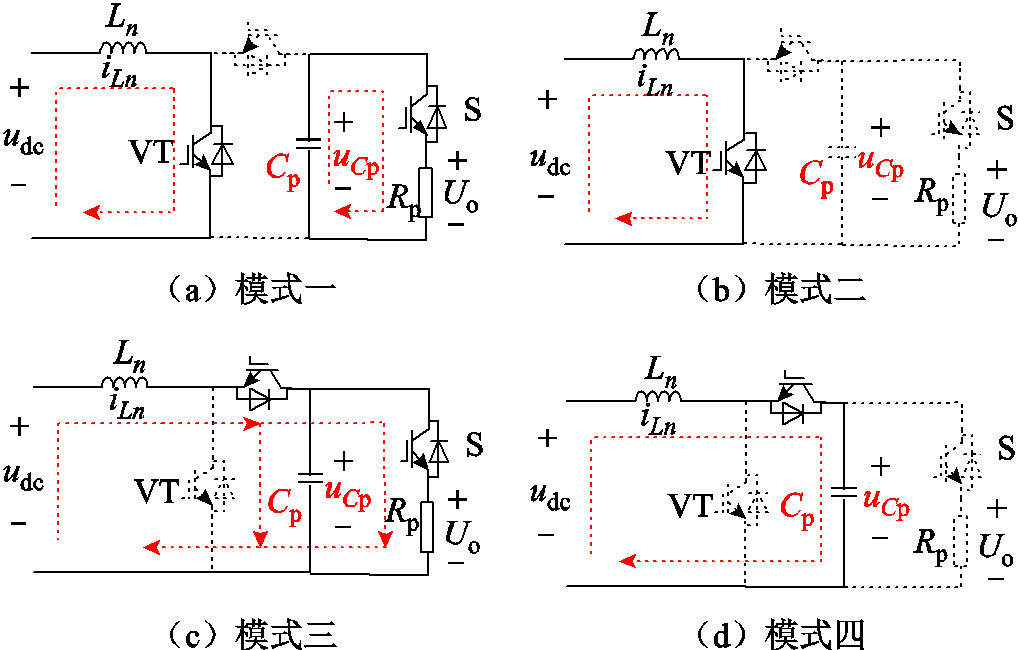
图5 Boost电路不同模式等效示意图
Fig.5 Equivalent diagram of different modes in Boost circuit
根据开关管VT及直流开关管S不同的导通情况,可将其分为四个模式进行分析:模式一为VT、S均导通;模式二为VT导通、S关断;模式三为VT关断、S导通;模式四为VT、S均关断。设开关管VT及直流开关管S的占空比函数分别为dpt及dp,通过对四个模式进行分析得到状态空间方程,进而得到递推关系式。
根据带脉冲负载Boost电路四种工作模式推导其离散状态方程,设电感电流iLn、支撑电容电压uCp为状态变量,即
 (18)
(18)
由图5可知,四种模式下系统状态矩阵及输入矩阵如式(19)所示,通过对Boost电路四种工作模式的推导可得到第n重电感电流的离散化状态空间方程,即k时刻与k+1时刻的电感电流预测模型。
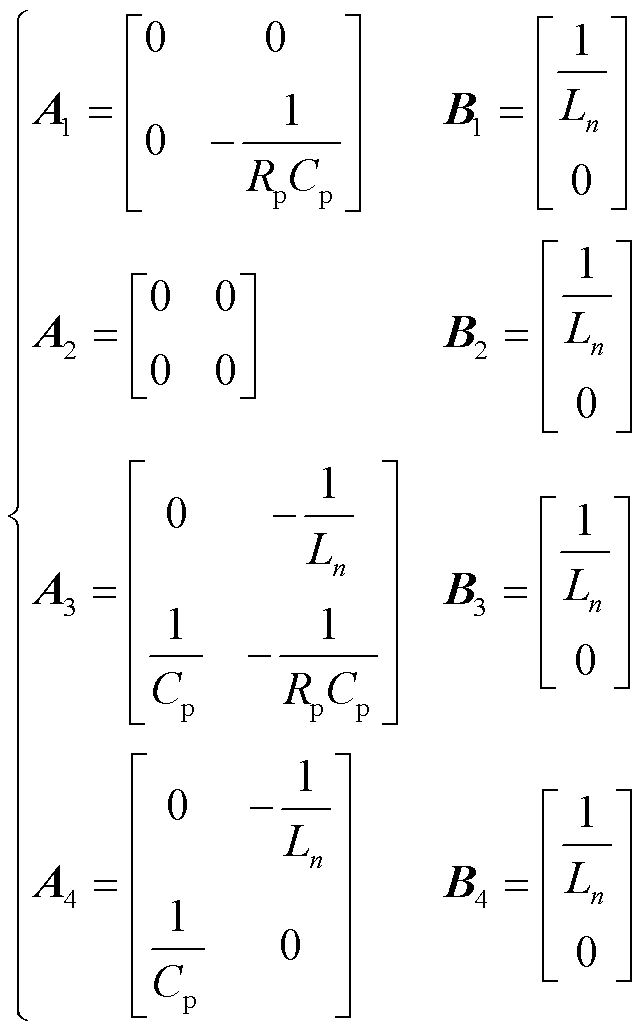 (19)
(19)
式中, ~
~ 和
和 ~
~ 分别为四种工作模式下的状态矩阵和输入矩阵。
分别为四种工作模式下的状态矩阵和输入矩阵。
对四种模式进行线性平均化处理,有
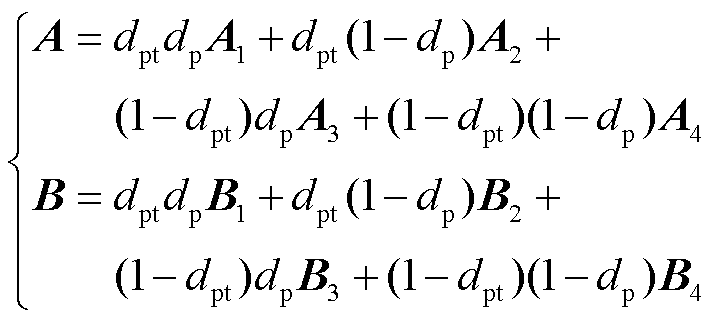 (20)
(20)
得到其状态空间方程后,经前向差分可得其离散化状态空间方程为
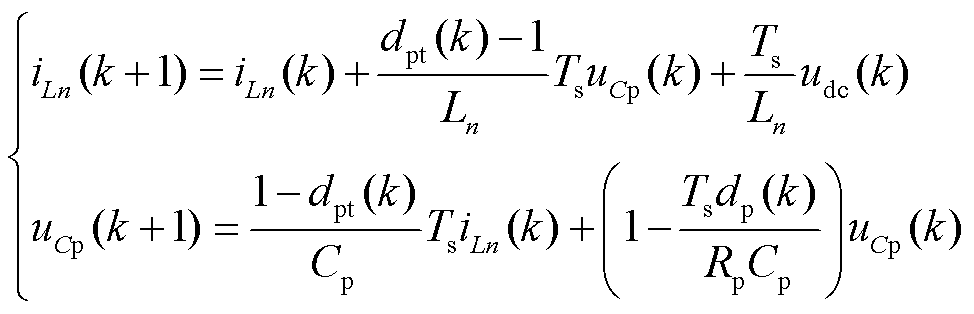 (21)
(21)
忽略损耗,整流前后有功功率相等,即
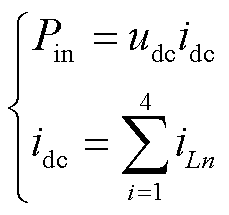 (22)
(22)
由式(17)和式(21)可知系统离散状态方程为
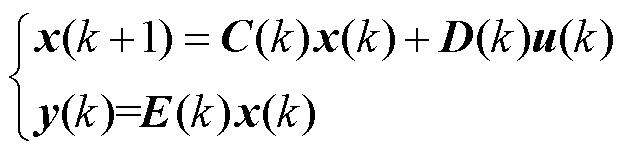 (23)
(23)
其中
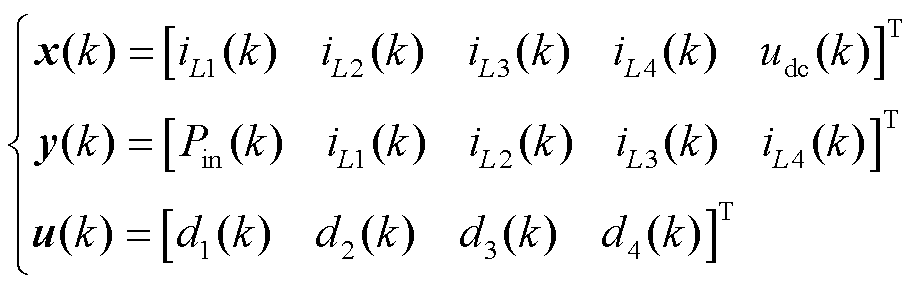 (24)
(24)
式中,d1、d2、d3、d4分别为各重Boost电路的占空比控制信号;C(k)为状态矩阵;D(k)和E(k)分别为输入矩阵和输出矩阵。C(k)、D(k)和E(k)表达式为
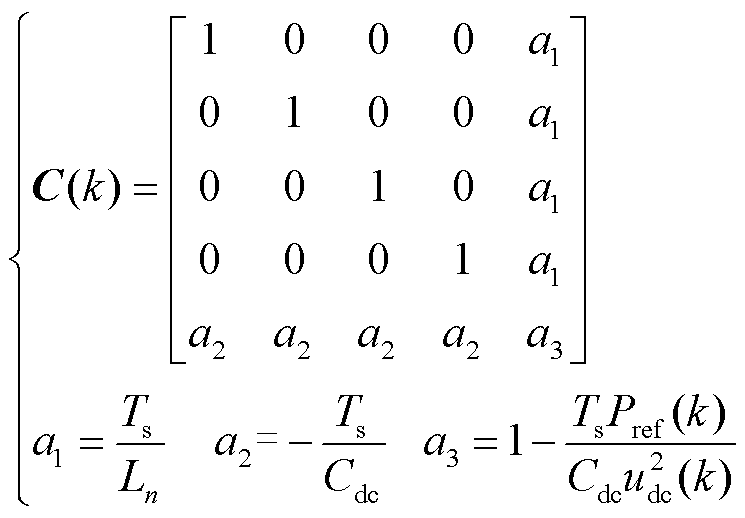 (25)
(25)
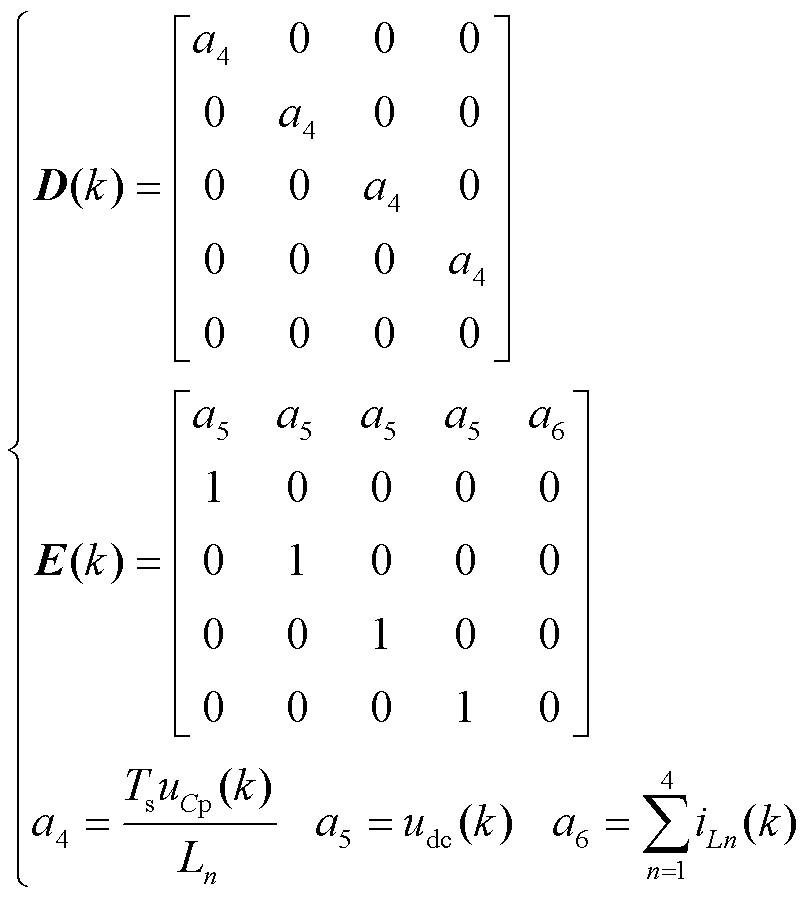 (26)
(26)
式中,各重Boost电路的电感值Ln均相同。
系统预测模型结构如图6所示。由图6可知,首先根据式(23)得到k+N时刻(N为预测时域)的系统离散状态方程,即x(k+N)和y(k+N),然后由此得到系统状态转移矩阵Φ、控制输入矩阵Ψ和输出变换矩阵Ω,进而可得预测状态向量X和输出预测向量Y,为建立目标函数做准备。
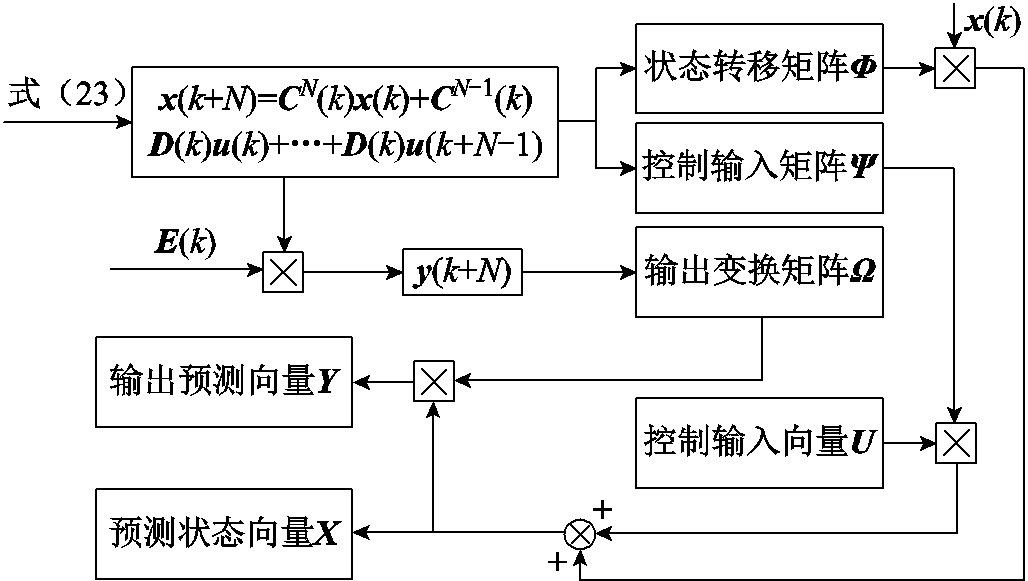
图6 预测模型结构
Fig.6 Prediction model architecture
本文通过控制四重交错并联Boost电路,使功率和电感电流跟随其参考值,并设计以功率和电感电流跟踪误差为基础的目标函数J。由于允许支撑电容电压在合理范围内波动,释放一部分电容能力,所以目标函数中不含输出电压项。根据控制目标,结合输出预测向量Y,可得输入功率和电感电流的目标函数J为
 (27)
(27)
式中,Yref和Q分别为参考值向量和权重矩阵,表达式分别为
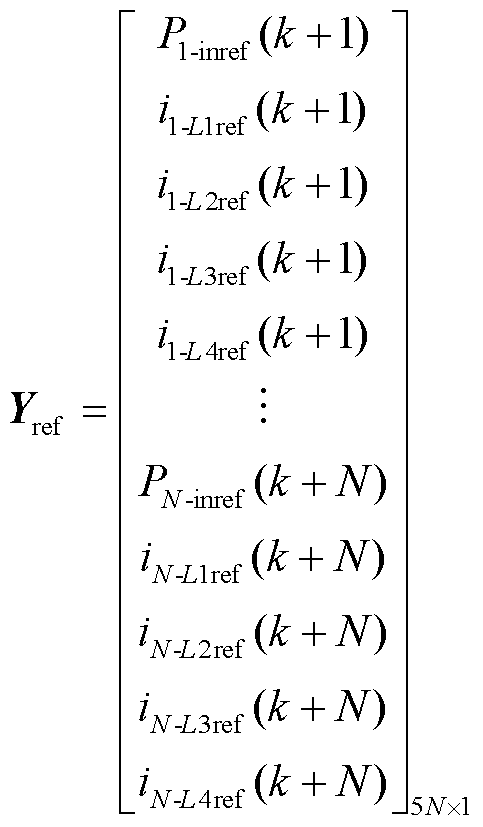 (28)
(28)
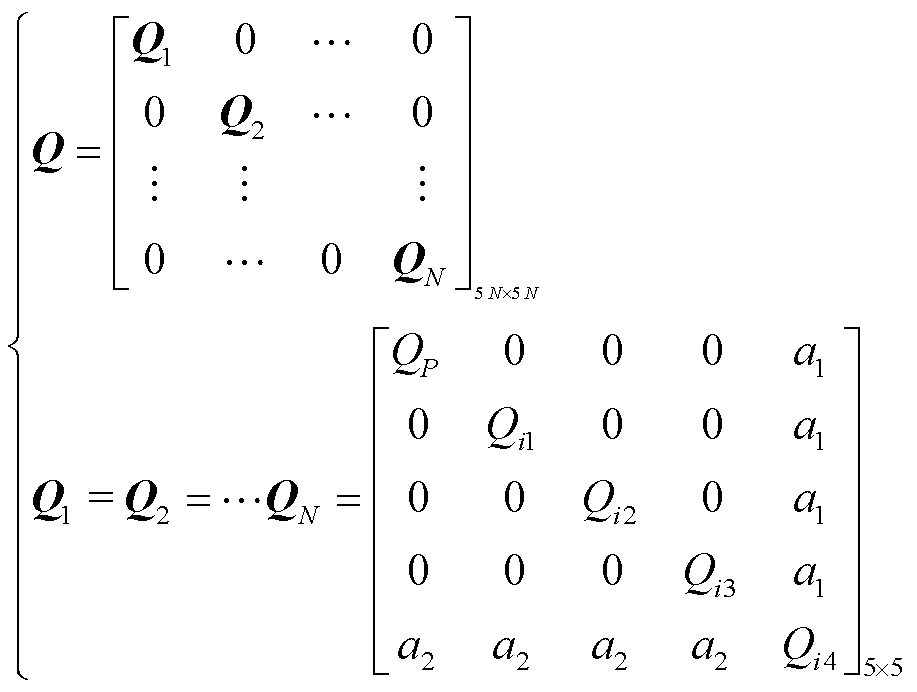 (29)
(29)
式中,PN-inref(k+N)、iN-L1ref(k+N)、iN-L2ref(k+N)、iN-L3ref(k+N)、iN-L4ref(k+N)分别为k+N时刻的输入功率和第1~4重电感电流参考值;QP为输入功率权重系数;Qi1~Qi4分别为第1~4重电感电流权重系数。
将目标函数J转换为二次规划形式,有
 (30)
(30)
其中
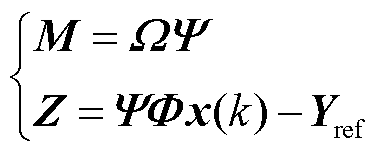 (31)
(31)
式中,U为最优控制输入向量。
而最小化目标函数可将其转换为二次规划问题,然后对控制量求偏导可得
 (32)
(32)
其中
 (33)
(33)
求得控制输入向量U为
 (34)
(34)
最优控制序列U(k)为
 (35)
(35)
式中,u(k+i|k)为k时刻计算得到的k+i时刻的最优控制信号。
将解得的最优序列中的第一项u(k|k)作用于系统中,在k+1时刻重复上述步骤,就实现了MPC滚动优化控制。
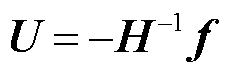
将以上步骤转换成算法流程如图7所示。该流程主要包括模型预测和最优控制两部分,先通过建立四重Boost电路带载脉冲负载的预测模型,预测区间N内所有时刻的状态变量;再通过建立带有约束的目标函数J,获取其目标函数最优解U。
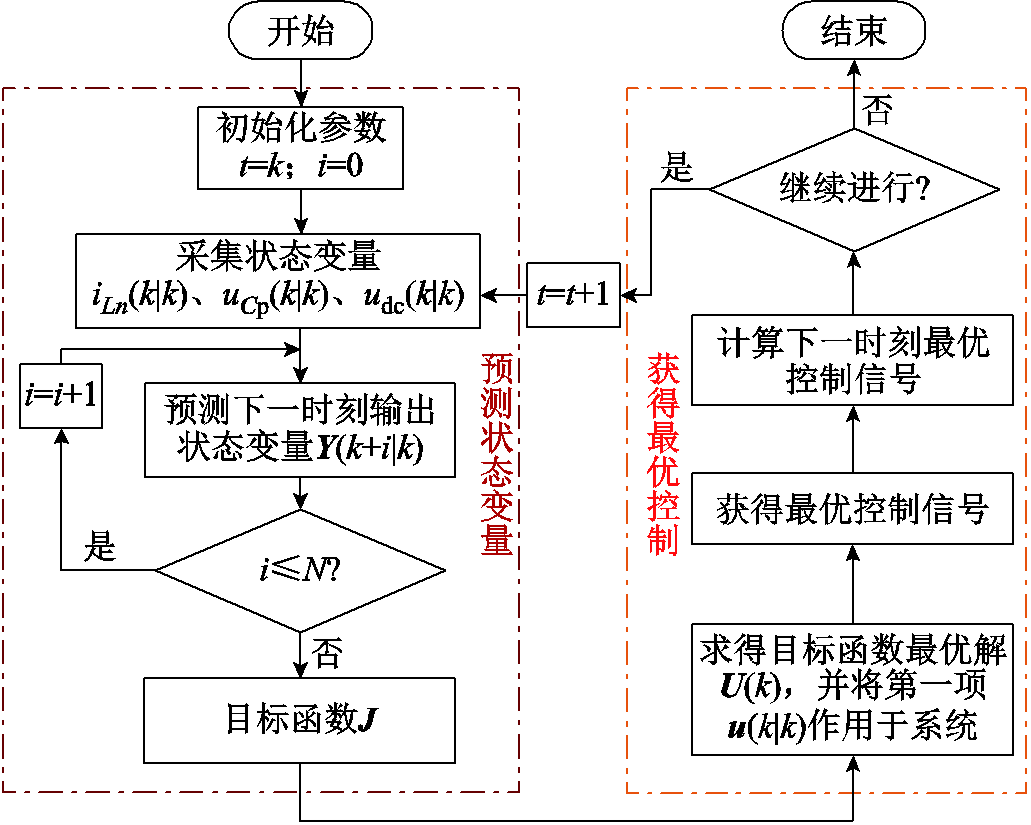
图7 MPC算法流程
Fig.7 MPC algorithm flow chart
在最优化控制的基础上,如要实现控制目标,还要对功率和电压进行约束。而功率参考值不能为定值,如为定值则无法对功率变化率进行约束,需要使其可变进而限制功率变化率。
为限制交流功率变化率和支撑电容电压波动范围,实现多目标控制,本文对交流侧功率参考值进行了自适应设计。在脉冲负载加/卸载、工况切换和工况叠加导致输出电压变化时,动态修正输入功率参考值,从而抑制功率变化率,缓解对发电机组的冲击。并且利用功率参考值与电压调节的耦合关系使输出电压在合理范围内波动,进而实现多目标控制。脉冲负载加载时支撑电容电压、输入功率稳定过程示意图如图8所示。图中,u1max和u1min、u2max和u2min、u3max和u3min分别为u1、u2、u3三个电压等级的最大值和最小值,ΔPin1-ref、ΔPin2-ref、ΔPin3-ref分别为不同电压范围时所设不同功率参考增减值。
图8 支撑电容电压、输入功率稳定过程示意图
Fig.8 Stability process diagram of supporting capacitor voltage and input power
脉冲负载加载时,在t0~t1时间段内,当电压降到u1min~u2min之间时使输入功率每个工频周期增加ΔPin1-ref,当电压降到u2min~u3min之间时使输入功率每个工频周期增加ΔPin2-ref,当电压低于u3min时使输入功率每个工频周期增加ΔPin3-ref,这样就可以实现输入功率的缓慢上升,满足功率变化率的限制。此时电压上升,由于功率达到目标值并有一定超调,超调的功率会使支撑电容电压超出目标电压范围,因此在t2~t3时间段内应不断减小功率参考值。在t4~t5时间段内与t0~t1时间段情况一致,应不断增加功率参考值。当脉冲负载卸载时,同理在t6~t7时间段内,应在不同的电压区间内不断减小不同的功率参考值。
根据上述分析,本文设计了功率参考值自适应规则,表示为
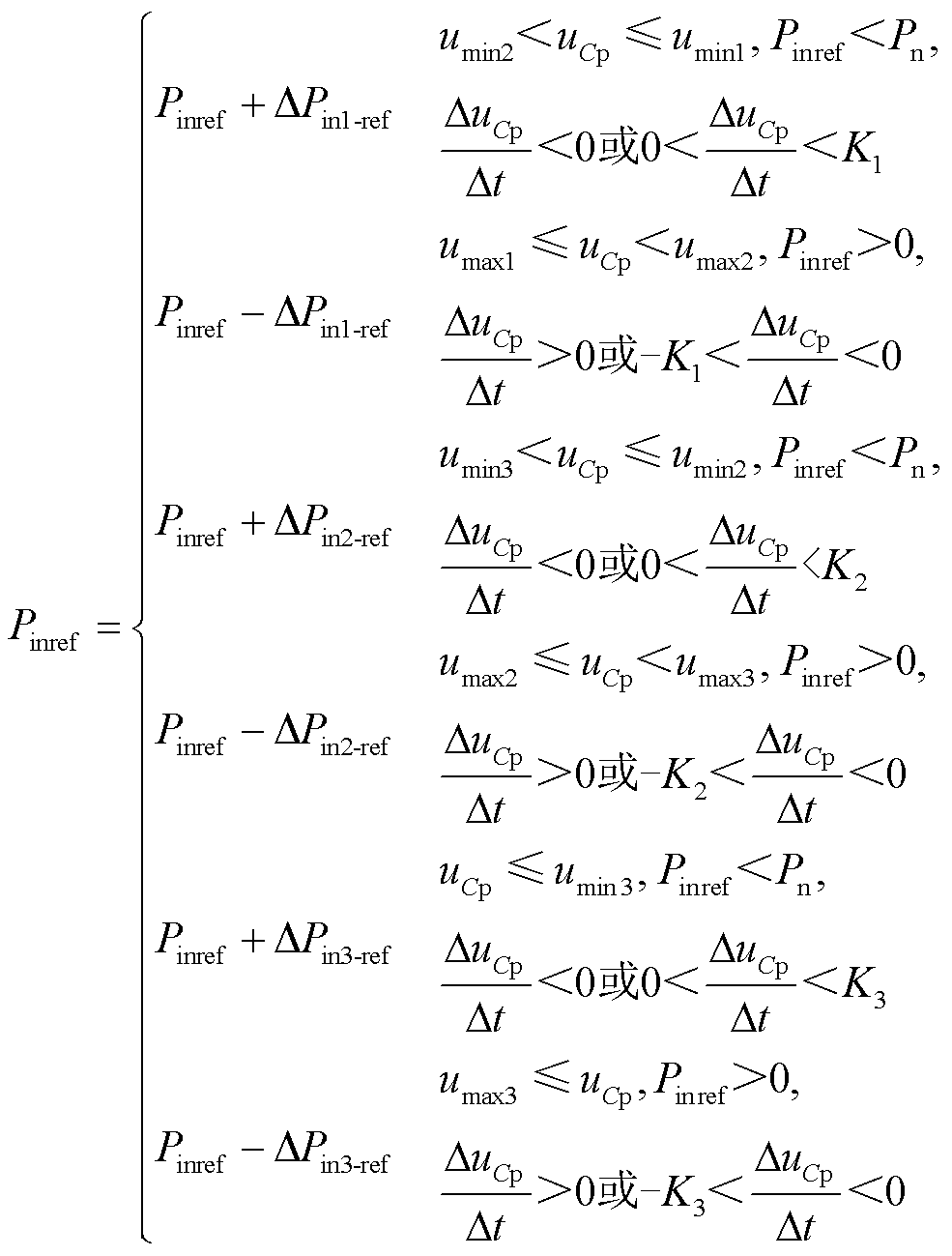 (36)
(36)
式中,ΔuCp/Δt为电压变化率;K1、K2、K3为设计的所允许电压变化率最大值;Pn为额定平均功率。
设计一个电压变化范围虽然能在一定程度上限制功率变化率,但输入功率参考值Pinref在短时间内的变化幅度较大,难以对输入功率变化率进行有效限制。为解决这一问题,本文设计了6个不同的电压范围。当输出电压处于不同的电压范围时,对应不同的功率参考值增减量ΔPinref,并且相邻电压范围之间功率参考值增减量的变化幅度较小。通过这种方式,可使输入功率在同一时间段内实现小范围变化,确保输入功率变化率处于允许范围内,进而达到平抑脉冲功率冲击的目的。
在限制输入功率变化率的同时,为保证脉冲负载供电精度,设计的电压变化范围应小于脉冲负载允许电压波动限值,且ΔPin1-ref、ΔPin2-ref、ΔPin3-ref在设计时应为依次递增的关系,不超过工频周期内最大功率变化量,即
 (37)
(37)
式中,ΔPmax为工频周期内所允许最大功率变化量。由图8分析可知,通过设置较大的ΔPin3-ref可使其输出电压波动较大时实现电压的快速回调,而通过设置较小的ΔPin1-ref、ΔPin2-ref可使其输出电压波动较小时实现稳定调节,从而使输出电压在脉冲负载所允许的电压范围内波动,满足脉冲负载供电精度要求。
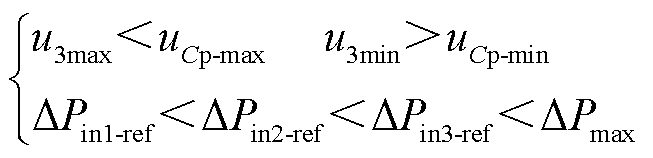
基于第2节和3.1节分析,本文设计了基于MPC的功率参考值自适应脉冲平抑控制策略,如图9所示。
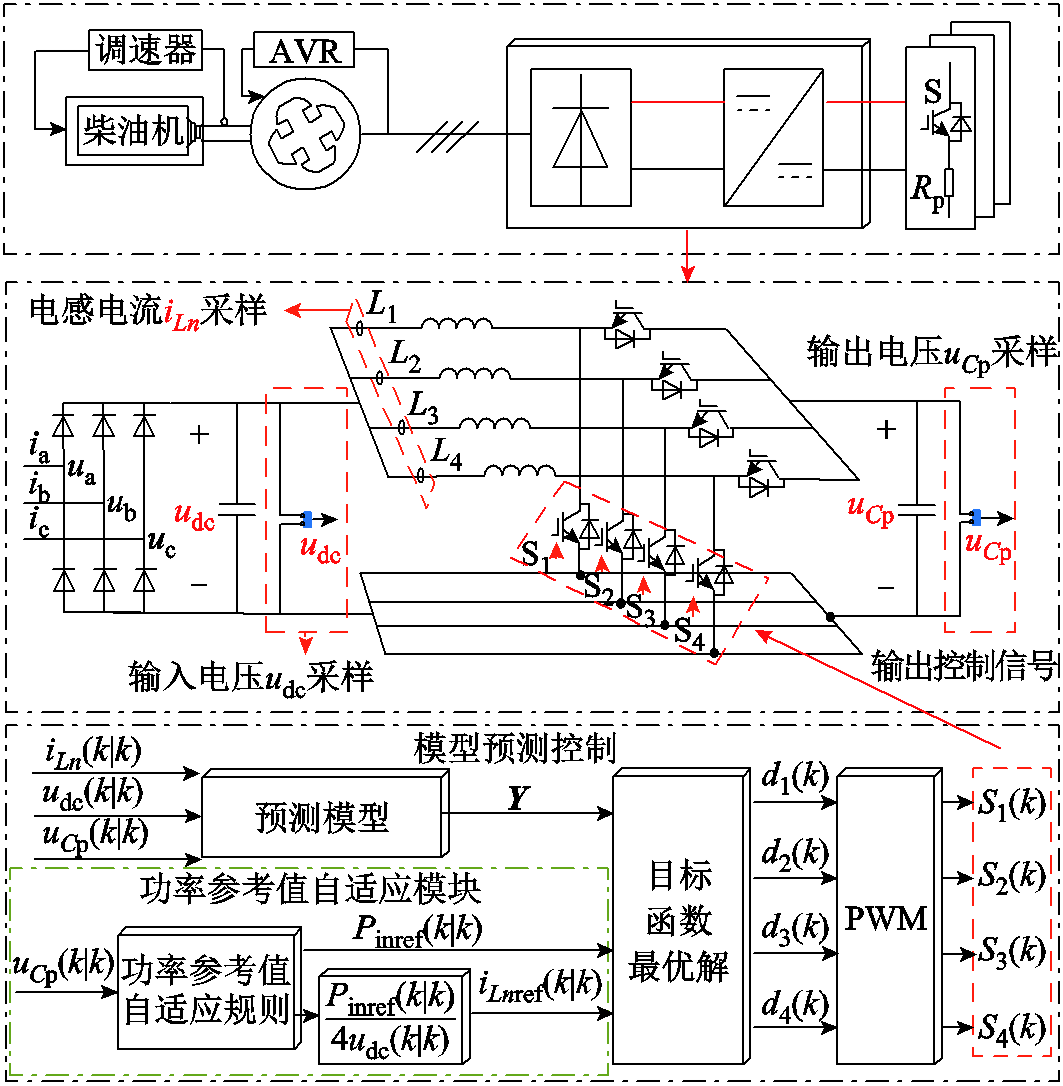
图9 基于MPC的脉冲平抑控制策略
Fig.9 Pulse smoothing control strategy based on MPC
该控制策略利用MPC对脉冲负载供电电路即四重Boost电路进行最优化控制,通过对目标函数的最优化求解,实现了输入功率和电感电流对其参考值的跟随。并且设计了自适应功率参考值模块,实现了在脉冲负载加/卸载、工况切换和工况叠加时减小输入功率变化率以及允许支撑电容电压在合理范围内波动的目的,解决了源荷间的不匹配问题。
首先,本文控制策略通过在k时刻采集每重Boost电路电感电流iL1(k|k)、iL2(k|k)、iL3(k|k)、iL4(k|k)以及输入电压udc(k|k)、输出电压uCp(k|k)作为MPC控制器的输入状态变量。其次,经过预测模型,得到输出预测向量Y,即功率预测模型和电感电流预测模型。同时,功率参考值自适应模块通过采集k时刻输出电压值uCp(k|k),根据自适应规则即式(36)判断得到输入功率参考值Pinref(k|k),实现在脉冲负载任意工况下输出电压变化时功率参考值的自适应修正,并且计算得到电感电流参考值iLnref(k|k)。然后,将Y、Pinref(k|k)、iLnref(k|k)送入目标函数J即式(27)中,并进行目标函数的最优化求解,得到最优解u(k|k)。最后,将各重Boost电路最优控制信号进行PWM调制,并通过使各相载波移相90°实现四重Boost电路的移相控制,以减小电感电流纹波。在下一个采样时刻重新采集系统状态变量,根据系统当前状态重新计算最优解,实现滚动优化。
本文通过将RT Box 3与PLECS软件集成,搭建了控制硬件在环半实物仿真平台,如图10所示。RT Box 3作为实时仿真器,具有高精度和低延迟的特点,使其能够与PLECS仿真软件协同工作,从而进行复杂电力电子系统的实时仿真与验证。
图10 控制硬件在环半实物仿真平台
Fig.10 Control hardware-in-the-loop semi-physical simulation platform
为验证控制策略的有效性,搭建半实物仿真模型与传统稳压控制方法进行对比,通过设置不同的脉冲负载工况,验证在加/卸载、工况切换和工况叠加时本文控制策略对交流侧的功率冲击的抑制效果。
船舶综合电力系统仿真参数见表1,柴油发电机组和脉冲负载参数见附表2。四重Boost电路电感值及支撑电容容值皆由1.2节计算得到。按照工程规定,工频周期内交流侧功率变化率应不大于20%,支撑电容电压波动范围不超过±5%,即1.5 kV±75 V。
工况一——PPL1=10 MW,T1=20 ms,Dp1=0.4;工况二——PPL2=5 MW,T2=40 ms,Dp2=0.5;工况三——PPL3=8 MW,T3=25 ms,Dp3=0.6。为验证脉冲负载在加/卸载和工况切换下本文控制策略对交流侧输入功率Pin和支撑电容电压uCp的调节效果,设置上述三种工况在不同时间切入与切出。工况一在1 s时投入,10 s时切出;工况二在10 s时投入,20 s时切出;工况三在20 s时投入,29 s时切出。脉冲负载不同工况切换瞬时功率波形如图11所示。
表1 舰船综合电力系统仿真参数
Tab.1 Simulation parameters of shipboard integrated power system
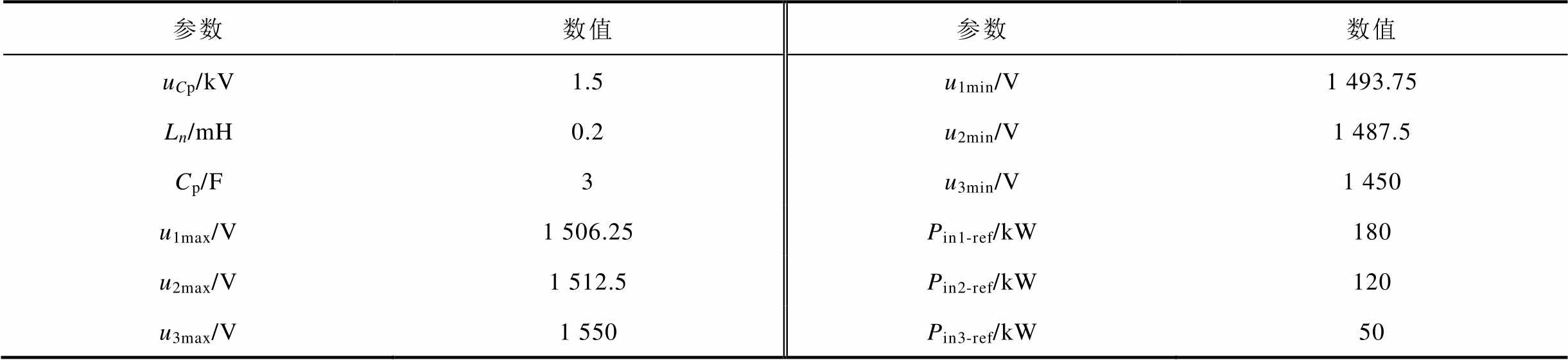
参数数值参数数值 uCp/kV1.5u1min/V1 493.75 Ln/mH0.2u2min/V1 487.5 Cp/F3u3min/V1 450 u1max/V1 506.25Pin1-ref/kW180 u2max/V1 512.5Pin2-ref/kW120 u3max/V1 550Pin3-ref/kW50
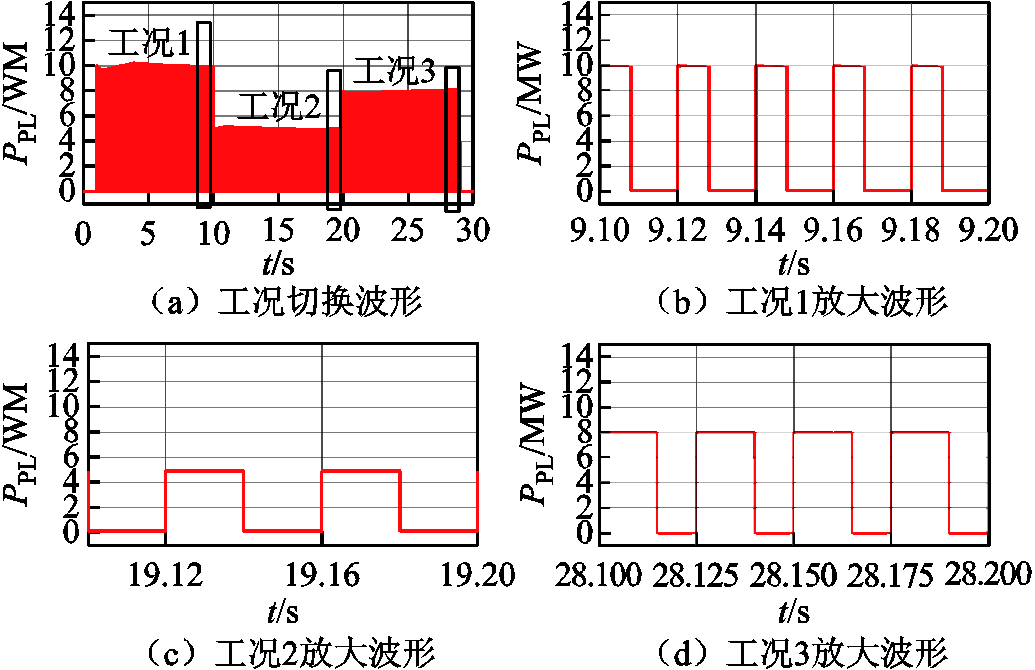
图11 脉冲负载工况切换瞬时功率波形
Fig.11 Instantaneous power waveform during pulse load operating condition switching
在不同工况切换时,将本文控制策略与传统控制策略进行对比,结果如图12所示。通过对比可以验证本文控制策略在加/卸载和工况切换时交流侧功率和负载电压的调节效果。
由图12可知,本文控制策略下支撑电容电压uCp在脉冲负载投入、切出和工况切换时的波动都比传统控制策略大。本文控制策略下支撑电容电压uCp最低为1 482 V,最高为1 518 V;而传统控制策略下支撑电容电压uCp最低为1 496 V,最高为1 505 V。原因是本文控制策略对功率进行了控制,而电压是通过设计6个电压范围,在6个电压范围内通过改变交流输入有功功率Pin参考值进行调节,但是电压波动范围都在1.5 kV±75 V的允许范围内。本文控制策略下的功率Pin、转速ω在脉冲功率冲击下都比传统控制下变化得更加缓慢。这是由于过于稳定的支撑电容电压uCp会使功率冲击传递到交流侧即柴油发电机端,使柴油发电机组响应脉冲负载的功率需求,这样反而加剧了脉冲负载对源端柴油发电机组的冲击。而本文允许支撑电容电压uCp在一定范围内波动,当脉冲负载功率突变时,释放支撑电容能力,减缓前端的能量需求,使其缓慢变化,达到减缓脉冲负载对交流侧功率冲击的目的。
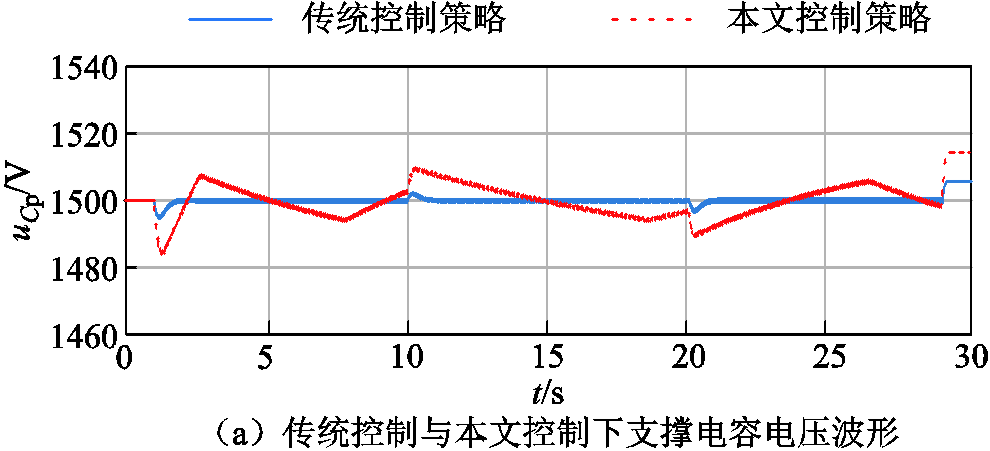
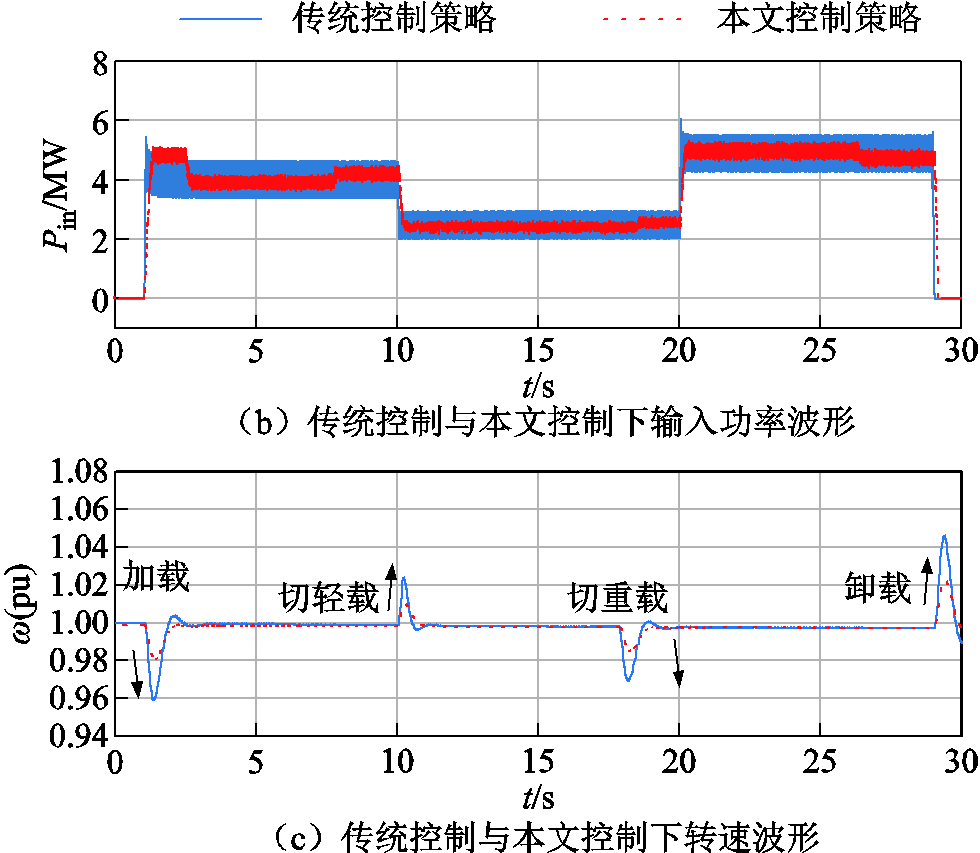
图12 工况切换时不同策略性能对比
Fig.12 Performance comparison of different strategies during operating condition switching
图13为图12中本文控制策略下的交流侧功率放大图。由图13可知,本文控制策略下,脉冲负载加载时的交流侧功率变化率为0.33 MW/20 ms,切轻载时的交流侧功率变化率为0.12 MW/20 ms,切重载时的交流侧功率变化率为0.25 MW/20 ms,卸载时的交流侧功率变化率为0.66 MW/20 ms,均小于工频周期内20%功率变化率即0.96 MW/20 ms。由此可知,本文控制策略能有效地限制脉冲负载加/卸载和工况切换时交流侧的功率变化率。
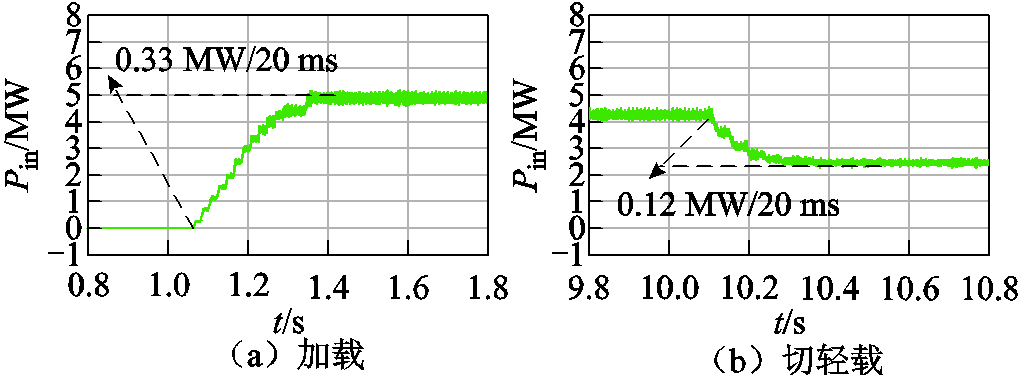
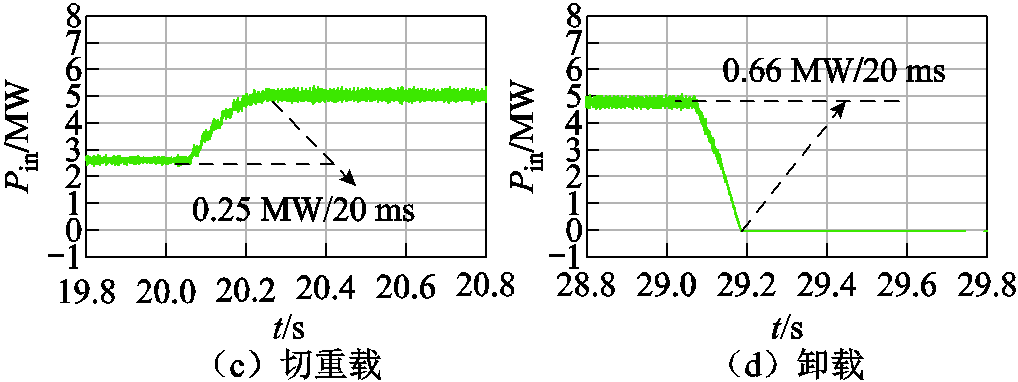
图13 工况切换时交流功率放大图
Fig.13 AC power amplifier circuit diagram during condition switching
为了验证脉冲负载工况叠加下本文控制策略的有效性,使工况一和工况三叠加运行,同时在1 s时投入,9 s时切出,其叠加运行时的脉冲负载瞬时功率波形如图14所示。
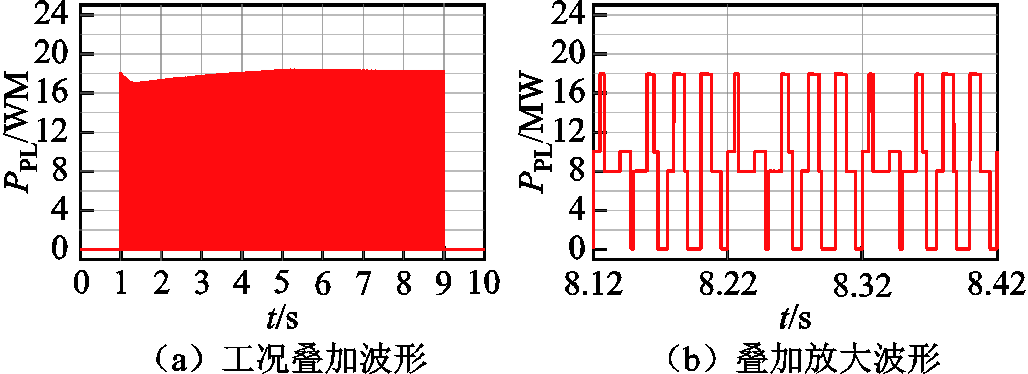
图14 脉冲负载工况叠加瞬时功率波形
Fig.14 Pulse load operating condition superimposed with instantaneous power waveform
同样地,在脉冲负载工况叠加时,将本文控制策略与传统稳压控制策略进行对比,结果如图15所示,通过对比可以验证本文控制策略在脉冲负载工况叠加下交流功率和负载电压的调节效果。由图15可知,本文控制策略下支撑电容电压uCp最低为1 468 V,最高为1 538 V;而传统控制策略下支撑电容电压uCp最低为1 490 V,最高为1 510 V。
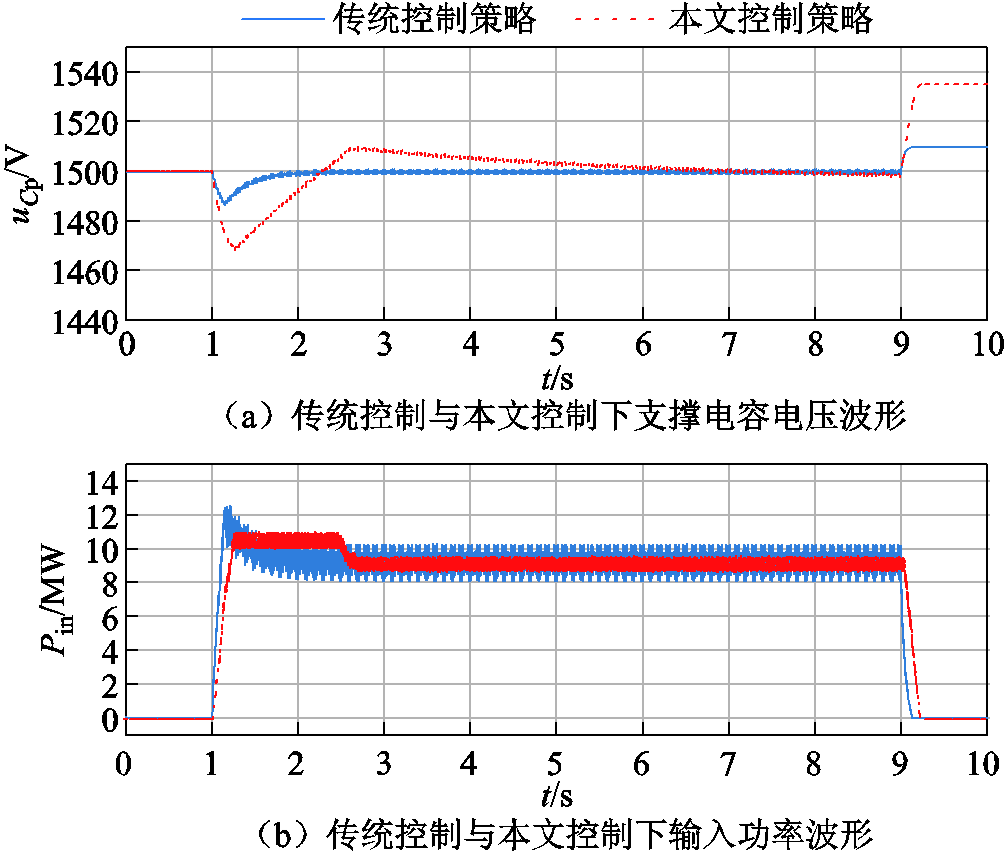
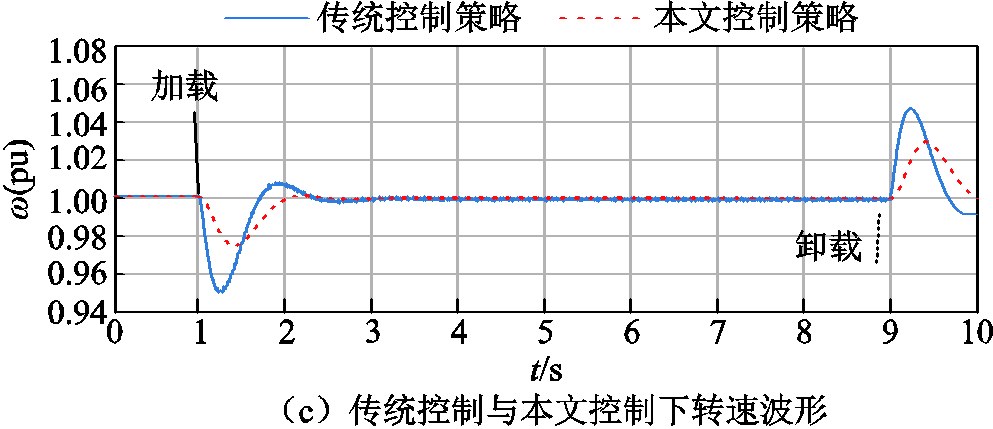
图15 仿真工况叠加时不同策略性能对比
Fig.15 Performance comparison of different strategies under superposition of simulation operating conditions
工况叠加时的功率冲击为两种单一工况功率冲击之和,因此功率冲击较单一工况更加恶劣。本文控制策略下电压跌落和上升都比单一工况加/卸载和工况切换时要大,但都在允许电压波动范围内,即不影响脉冲负载的正常工作。而交流侧功率Pin、转速ω在本文控制策略下均比在传统稳压控制下变化缓慢。图15中本文控制策略下的交流侧功率放大图如图16所示。
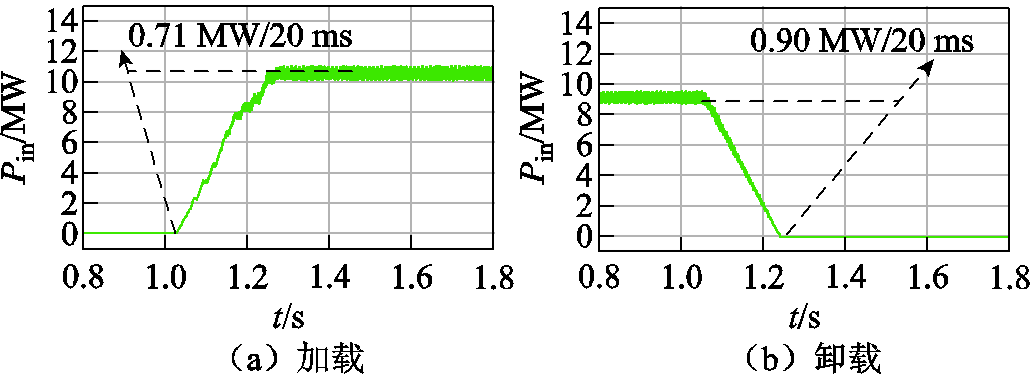
图16 工况叠加时交流功率放大图
Fig.16 AC power amplifier circuit diagram during superposition of operating conditions
由图16可知,在本文控制策略下,当脉冲负载工况叠加时,其加载瞬间交流侧的功率变化率为0.71 MW/20 ms,卸载时的交流侧功率变化率为0.90 MW/20 ms,同样小于工频周期内20%功率变化率即0.96 MW/20 ms。所以本文控制策略在脉冲负载工况叠加下依旧可以减缓脉冲负载对交流侧的冲击,并且保证脉冲负载正常工作。
为验证模型预测-功率参考值自适应脉冲平抑控制策略的有效性,本文设计并搭建了舰船综合电力系统模拟等比例缩小实验平台如图17所示。
该平台主要由发电系统模块、四重Boost电源柜、脉冲负载柜和远程上位机四部分组成。发电系统模块由同步发电机、励磁系统及感应电机组成。图17中励磁柜为自主制造,柜体中包含功率变换器和控制器,控制器包含驱动电路、反馈采样电路以及型号为TMS 320F28335的数字控制芯片。此外,还自主生产了AVR上位机程序,以便实现人机交互功能。四重Boost电源柜和脉冲负载柜分别采用一个控制箱实现控制环路及脉冲负载工况切换的所有功能,主控电路板为德州仪器生产的TMS320F28379D。上位机由LabVIEW平台搭建,上位机与两个主控制箱之间使用RS485通信,协议为Modbus RTU,且电源柜与负载柜都配置本地控制触摸屏,通信方式与上位机相同。
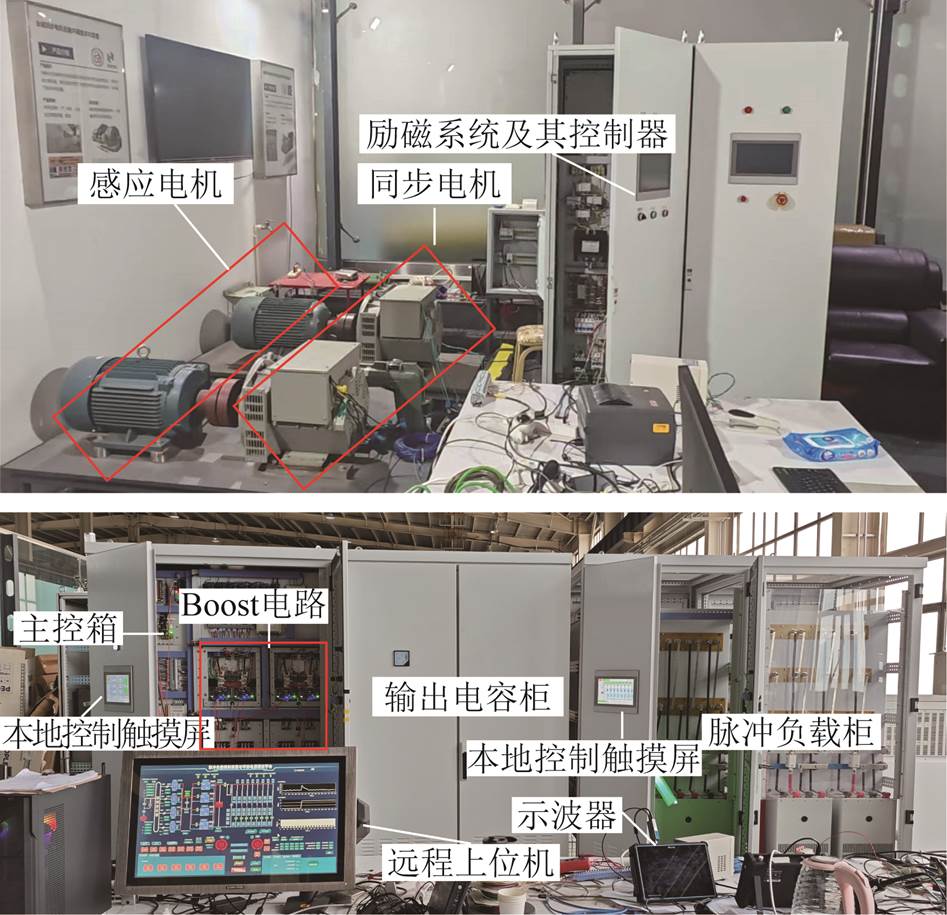
图17 舰船综合电力系统模拟实验平台
Fig.17 Warship integrated power system simulation test platform
实验平台关键参数设置见表2,四重Boost电路电感值及支撑电容值均由1.2节计算得到。按照工程规定,工频周期内交流侧功率变化率不大于20%,支撑电容电压波动范围为±5%,即720 V± 36 V。由于示波器通道的限制,转速ω、交流侧功率Pin、支撑电容电压uCp及脉冲负载电流iRP波形为多次重复试验获得,故负载投入、切出的时间不能保持一致。
表2 实验平台关键参数设置
Tab.2 Key parameters of the experimental platform
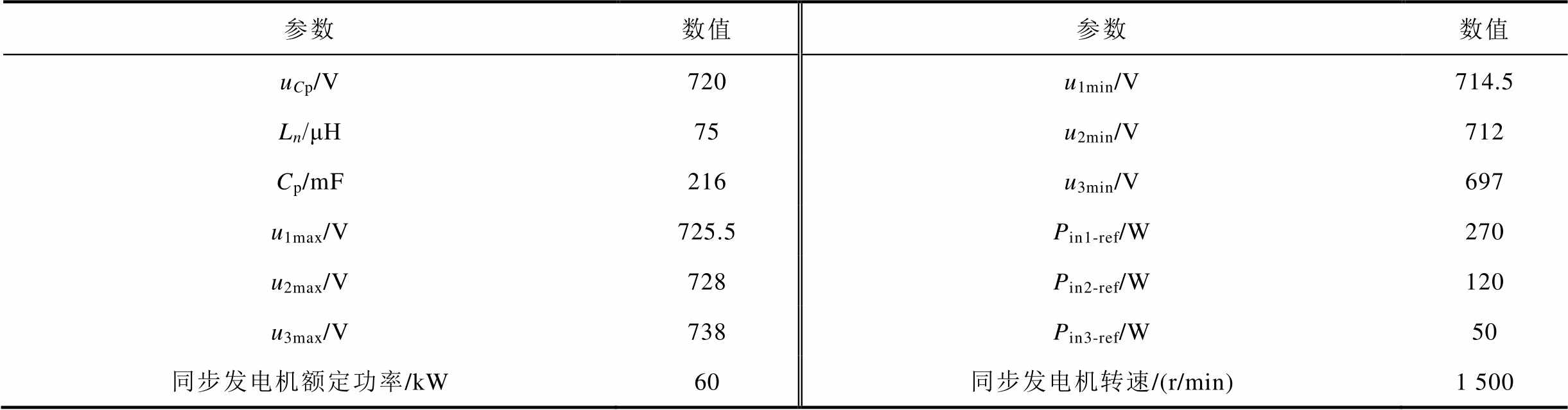
参数数值参数数值 uCp/V720u1min/V714.5 Ln/μH75u2min/V712 Cp/mF216u3min/V697 u1max/V725.5Pin1-ref/W270 u2max/V728Pin2-ref/W120 u3max/V738Pin3-ref/W50 同步发电机额定功率/kW60同步发电机转速/(r/min)1 500
分别设置以下三种不同工况,验证本文控制策略在脉冲负载加/卸载时和工况切换时的平抑效果。工况四:PPL4=50 kW,T4=20 ms,Dp4=0.4;工况五:PPL5=25 kW,T5=40 ms,Dp5=0.5;工况六:PPL6= 40 kW,T6=25 ms,Dp6=0.6。各工况脉冲负载电流波形如图18所示。图18a~图18c分别为工况四~六的脉冲负载电流波形,图18d为三种工况切换时的脉冲负载电流波形,切换顺序为工况四~六依次切换。为验证本文控制效果,现对传统稳压控制策略和本文控制策略进行实验对比,并进行量化分析。
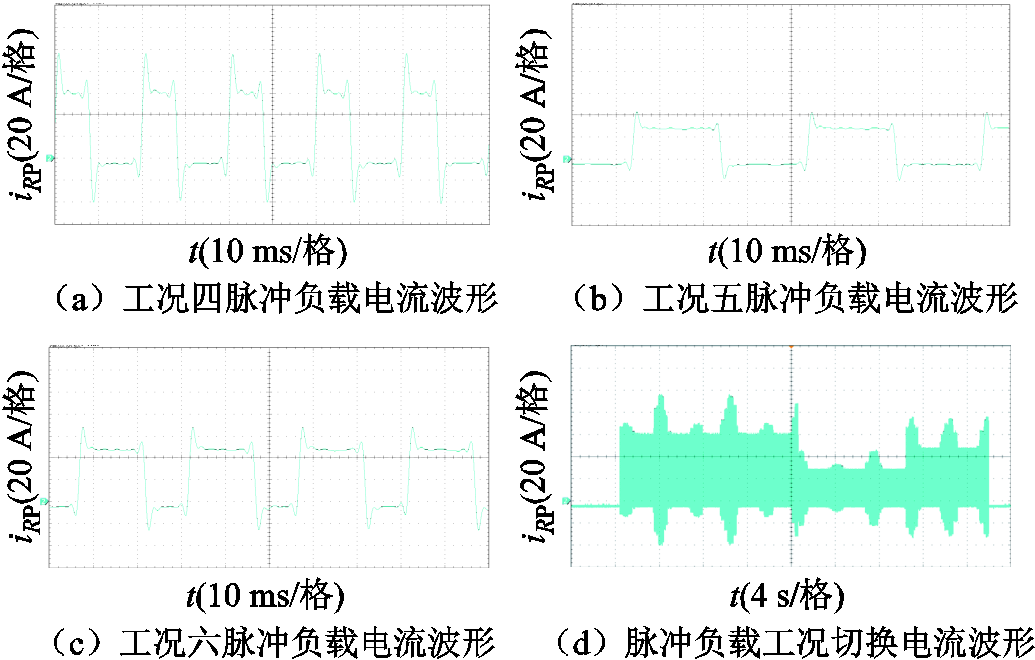
图18 脉冲负载电流波形
Fig.18 Pulse load current waveforms
传统稳压控制策略和本文控制策略下不同工况交流侧功率(紫色波形)、支撑电容电压(绿色波形)、同步发电机转速(蓝色波形)如图19~图21所示。
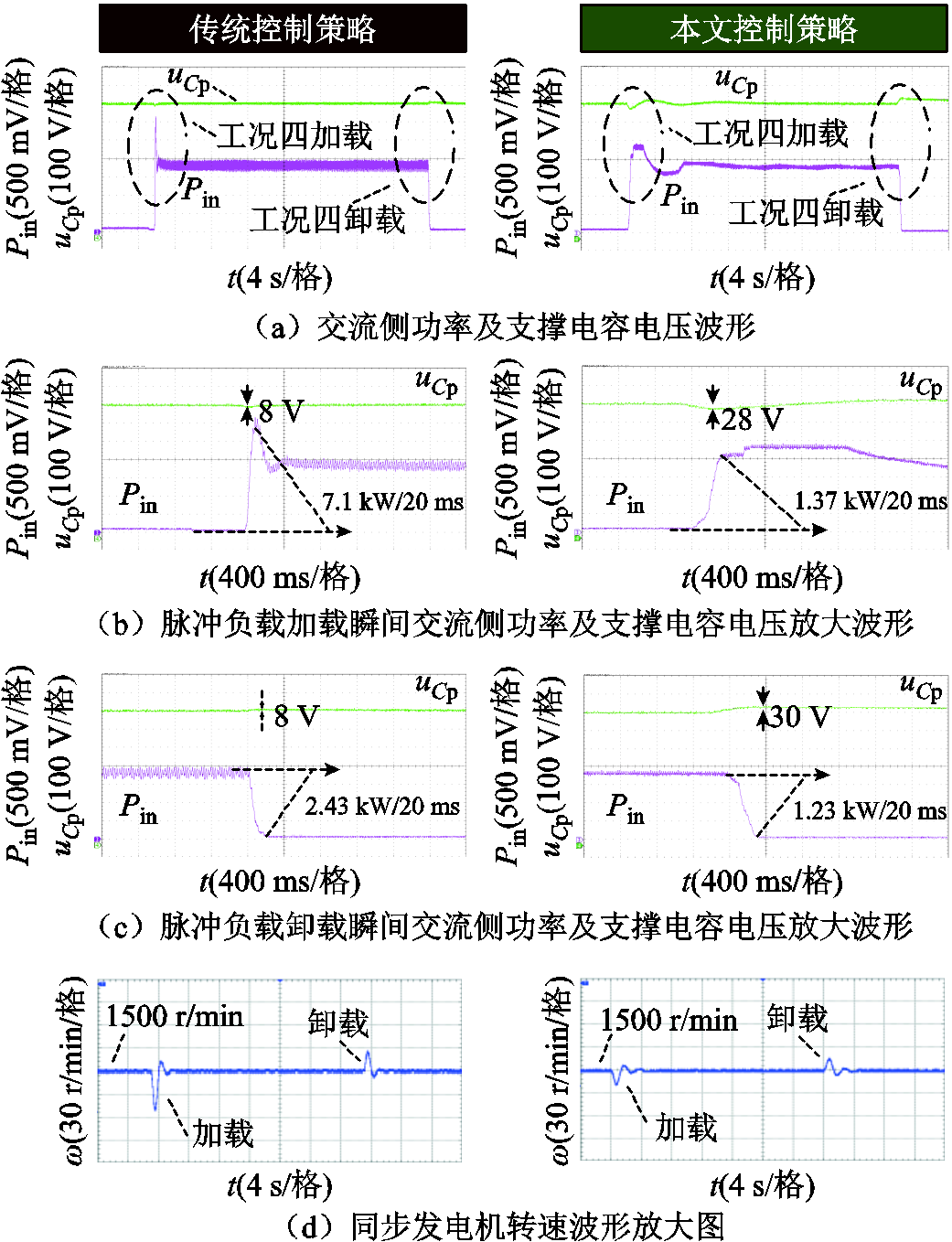
图19 工况四不同策略性能对比
Fig.19 Performance comparison of different strategies under operating condition Case 4
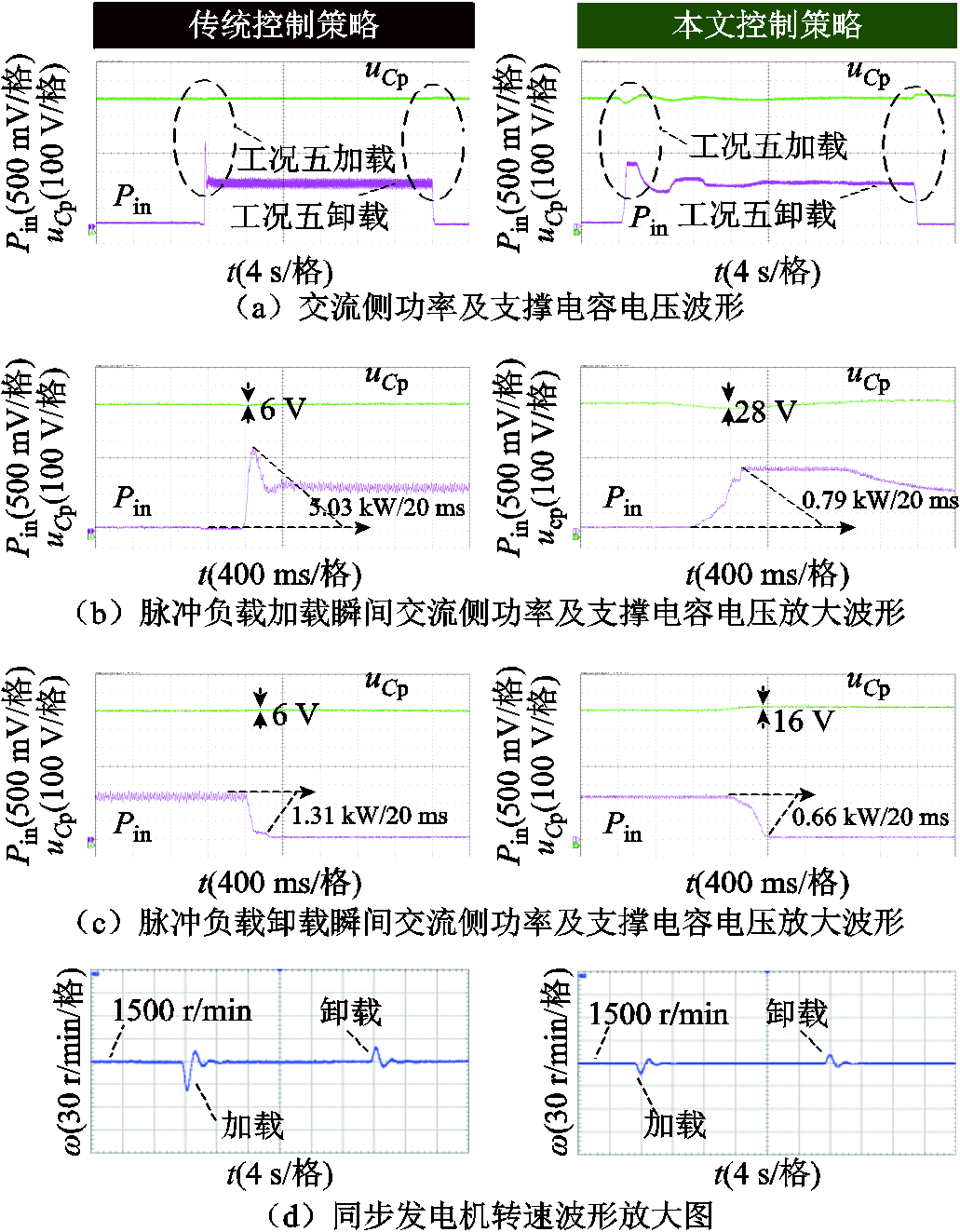
图20 工况五不同策略性能对比
Fig.20 Performance comparison of different strategies under operating condition Case 5
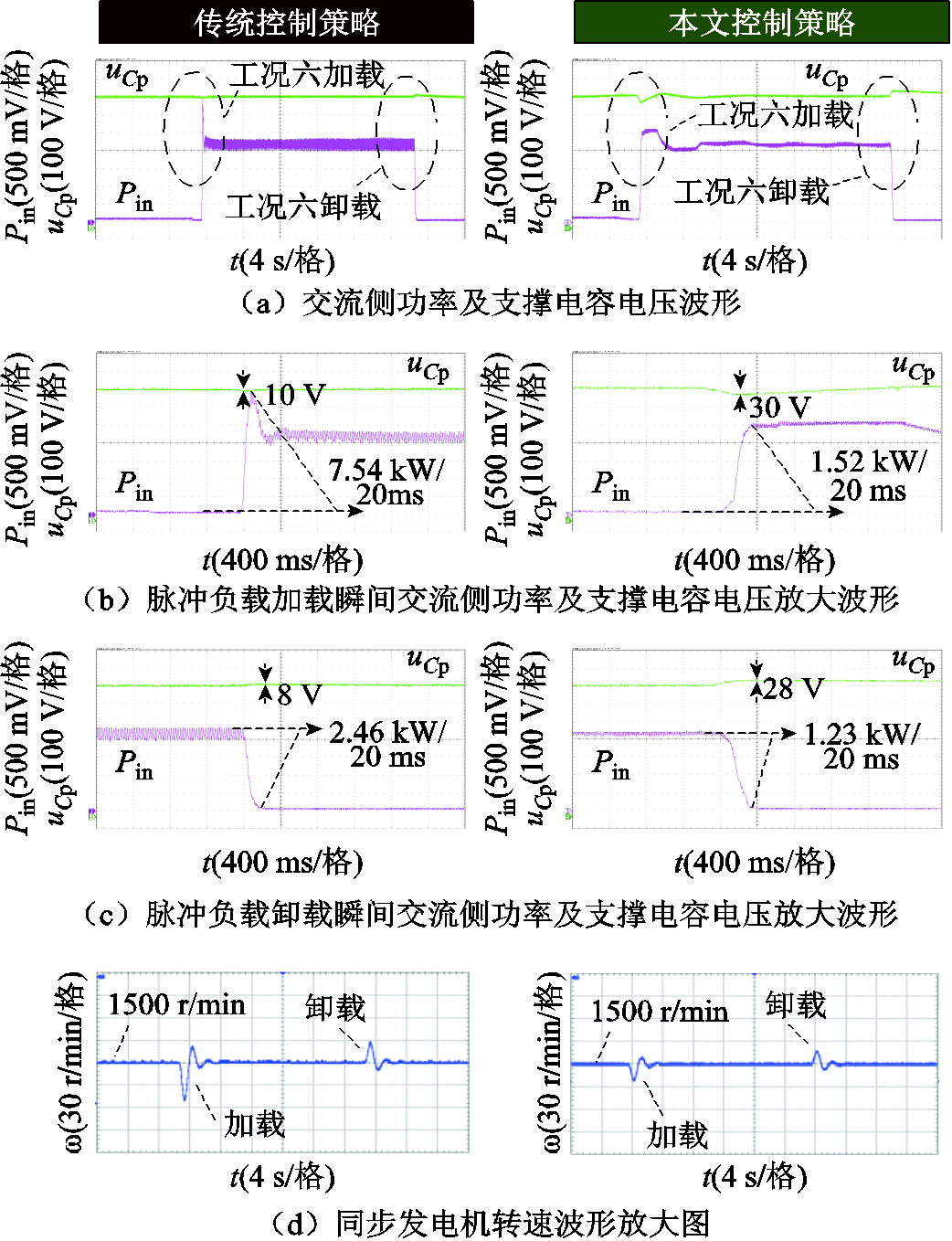
图21 工况六不同策略性能对比
Fig.21 Performance comparison of different strategies under operating condition Case 6
将上述三种工况进行工况切换实验,先加载工况四,再加载工况五,最后加载工况六并卸载,波形如图22所示,图中可体现不同工况切换时本文控制策略的优越性。
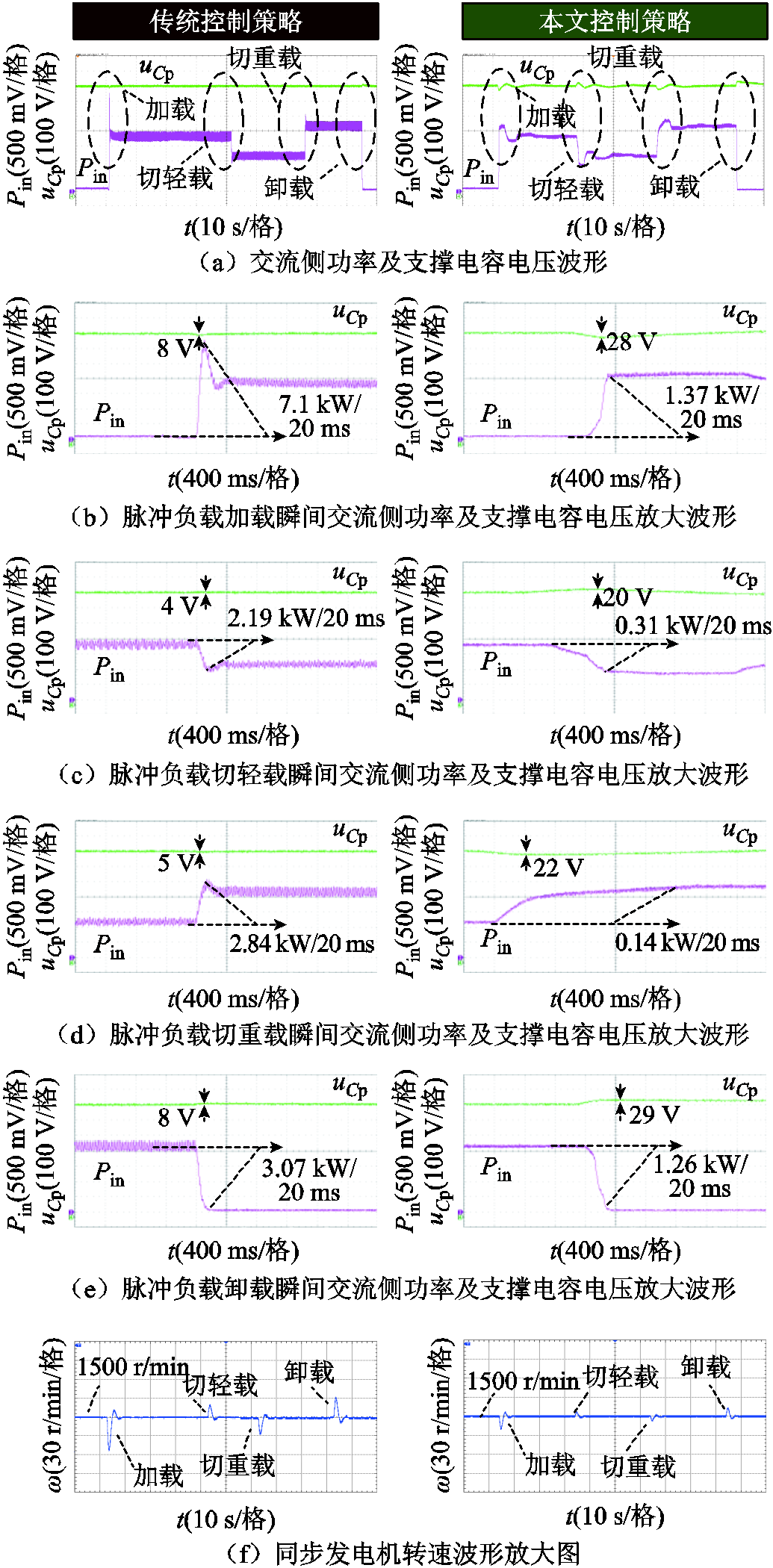
图22 三种工况切换不同策略性能对比
Fig.22 Performance comparison of different strategies during three operating condition transitions
功率波形采集通过模拟电压获得,TMS320F28379D将实际功率转换为数据量,利用串行外设接口(Serial Peripheral Interface, SPI)将数据量实时传递至外部数-模转换器,示波器通过数-模转换器上的模拟电压获得功率波形,其对应转换关系为91.5 mV/kW。由图19~图22实验波形可知,本文控制策略下三种工况加/卸载和工况切换时最大功率变化率为1.52 kW/20 ms,远小于20%功率变化率,即7.2 kW/ 20 ms。支撑电容电压最大波动为30 V,不超过36 V的波动限值。图19~图22中也体现了功率随电压变化而自适应调整的能力,且最终都趋于稳定。传统稳压控制策略最大电压波动为10 V,过于稳定的电压会使功率冲击传递至交流侧,其最大功率变化率为7.54 kW/20 ms,超过了20%功率变化率,也导致其转速比本文控制策略下的波动要大,验证了本文控制策略的优越性。
为验证脉冲负载叠加工况下本文控制策略的有效性,设置三种工况在同一时刻投入,并在同一时刻切出。脉冲负载电流波形如图23所示。叠加工况为:工况七——PPL7=15 kW,T7= 40 ms,Dp7=0.8;工况八——PPL8=10 kW,T8=20 ms,Dp8=0.6;工况九——PPL9=11 kW,T9=20ms,Dp9=0.8。三种工况叠加后脉冲负载电流波形如图23d所示。
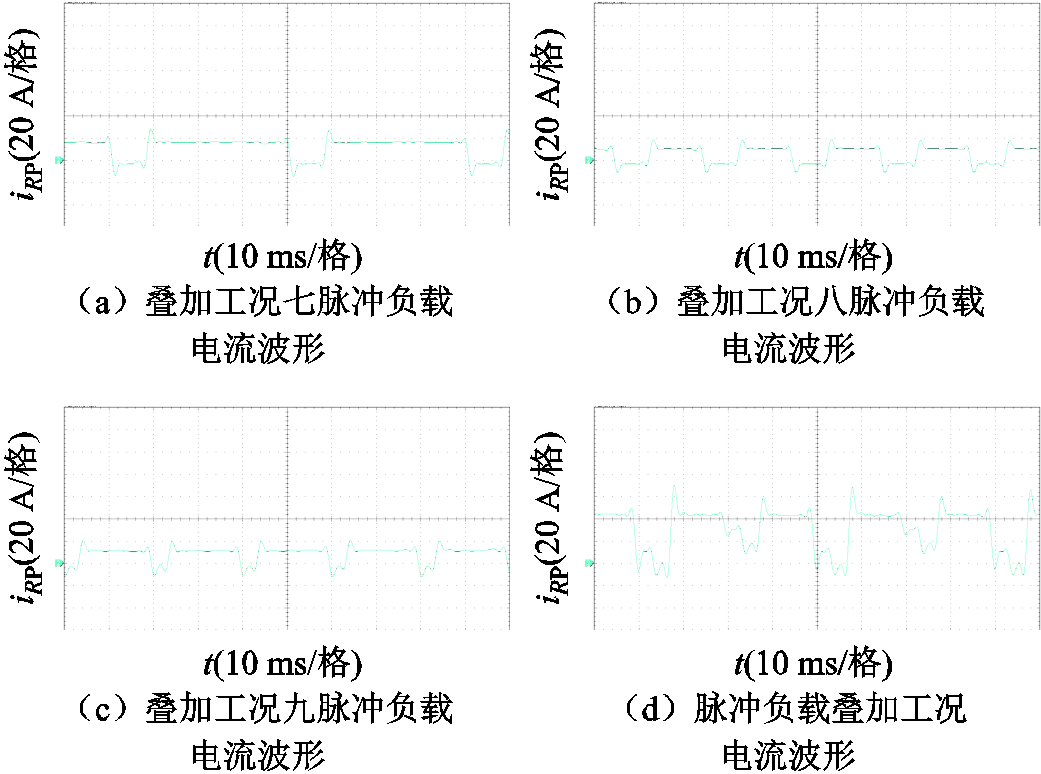
图23 工况叠加脉冲负载电流波形
Fig.23 Operating condition superimposed with pulsed load current waveforms
工况叠加时不同策略性能对比如图24所示。工况叠加后交流侧功率是三种负载工况平均功率的加和,由图24可见本文控制策略下的交流侧功率变化率同样远小于传统控制策略,且电压波动在合理范围内。
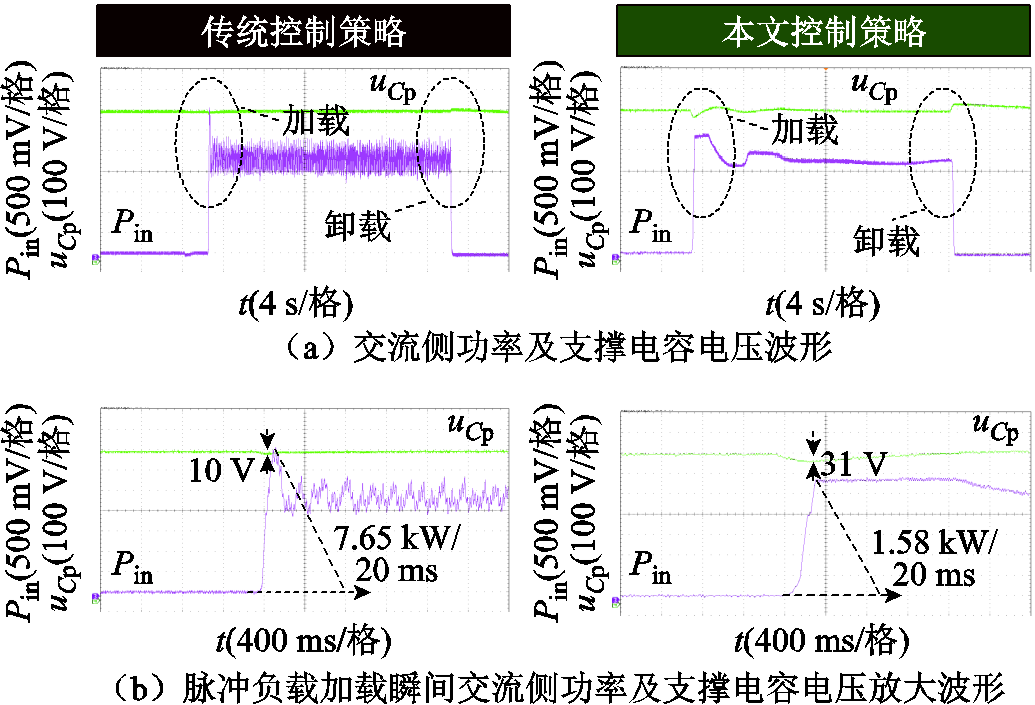
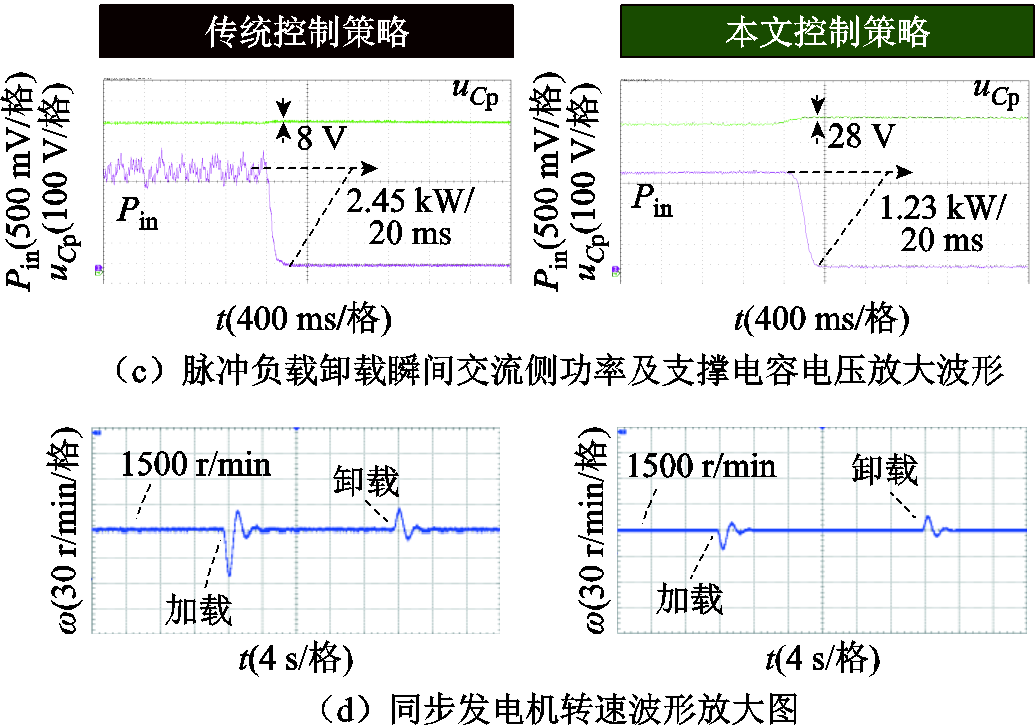
图24 实验工况叠加时不同策略性能对比
Fig.24 Performance comparison of different strategies under superposition of experimental operating conditions
为验证极限工况下的边界条件,即电压波动±5%,本文投切满载工况设置为:PPLmax=50 kW,Tmax=20 ms,Dpmax=0.72,以验证极限工况时的风险。满载工况下功率及电压波形如图25所示。
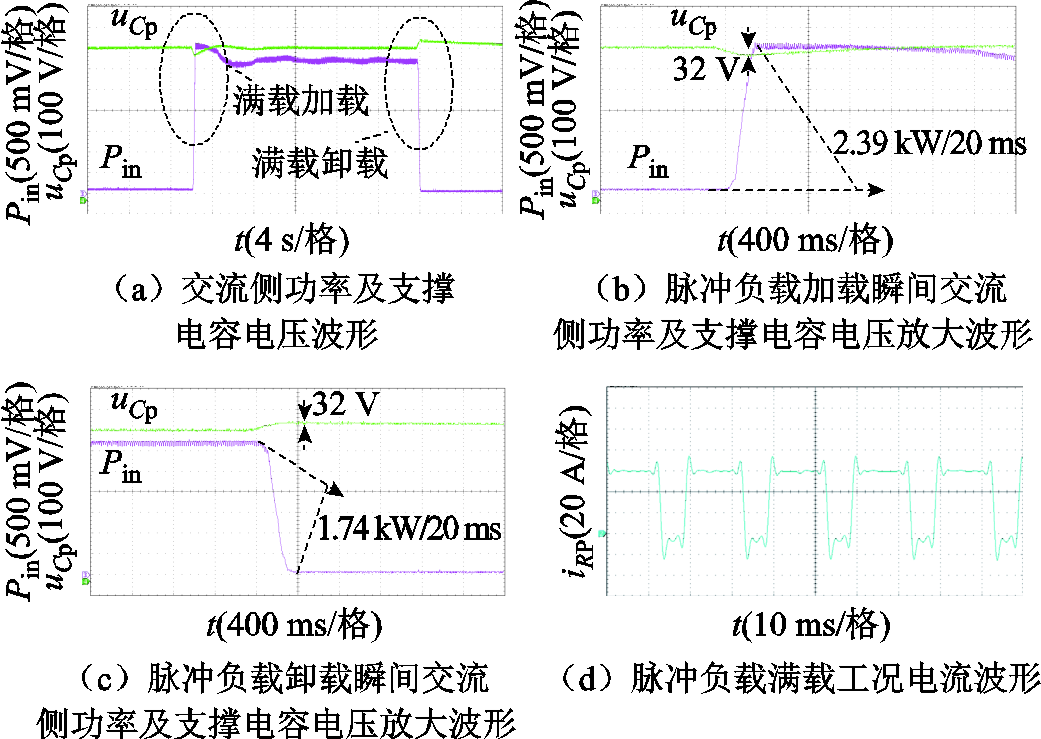
图25 满载工况下功率及电压波形
Fig.25 Power and voltage waveforms under full-load operating condition
由于实验平台平抑效果满足控制目标,所以满载工况下电压波动也不会达到±5%,电压波动为32 V。当电压波动超过±36 V时会影响脉冲负载正常工作,导致设备功能异常或故障,严重时会击穿IGBT等功率开关器件。本文实验平台为模拟脉冲负载装置,当电压超过±36 V时会触发过电压和欠电压保护,使设备停机以保护设备不被损坏。
由实验结果可知,本文控制策略在脉冲负载加/卸载、工况切换和多工况叠加时均能使交流侧功率变换率控制在20%以内,并且允许支撑电容电压在合理范围内波动,实现了控制目标,抑制了脉冲负载对交流侧的冲击,同时也满足了脉冲负载的供电精度要求。
针对舰船综合电力系统源-荷功率失配问题,本文提出一种基于多目标模型预测控制的脉冲功率平抑方法。通过构建功率参考值自适应优化机制,实现了单级变换器的瞬时功率冲击平抑和支撑电容能力的释放,并且通过半实物仿真及动模实验平台验证了控制策略的有效性。本文得出以下结论:
1)传统单级变换器的稳压控制只满足了脉冲负载的供电精度要求,却使功率冲击传递至交流侧,影响了柴油发电机组的稳定运行。
2)本文所设计的功率参考值自适应-模型预测控制策略能实现单级变换器多目标控制,根据支撑电容电压的波动范围改变功率参考值的增减量,减缓对柴油机组的功率冲击。
3)在脉冲负载单工况突加/突卸、多工况切换和工况叠加时,与传统控制策略相比,所提控制策略显著降低了其对柴油发电机组侧功率冲击的影响,并允许支撑电容电压在合理范围内波动。
综上所述,本文控制策略限制了交流侧功率变化率并使支撑电容电压在合理范围内波动,适用于脉冲负载突加/突卸、工况切换和工况叠加时对柴油发电机组的功率冲击问题,对于提升搭载脉冲负载的舰船综合电力系统稳定性具有实际意义。
附 录
附表1 单级变换器与两级变换器优势对比
App.Tab.1 Comparison of advantages of single-stage and bipolar converters

对比项单级变换器两级变换器单级变换器优势 成本低高单级变换器成本较两级变换器低30%~50% 体积小大单级变换器体积为两级变换器的60%~75% 故障率低高单级变换器故障率为两级变换器的50%~70% 效率95%90.25%单级变换器效率比两级变换器高约4.75个百分点 功率损耗60 kW117 kW单级变换器总损耗比两级变换器低约49%
附表2 柴油发电机组和脉冲负载仿真参数
App.Tab.2 Diesel generator set and pulse load simulation parameters
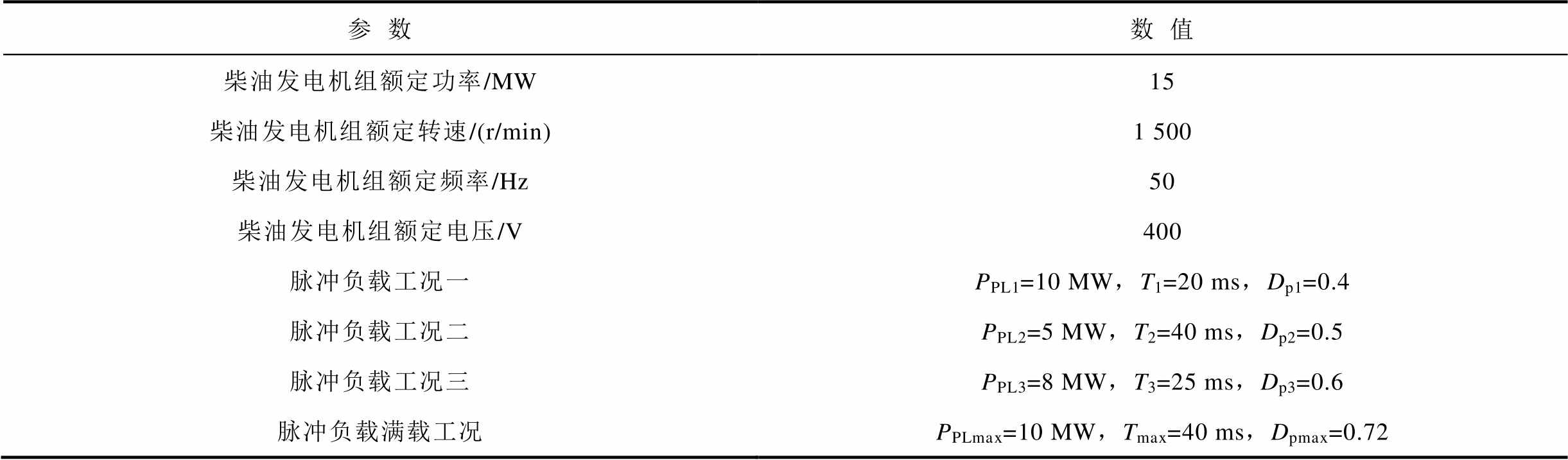
参数数值 柴油发电机组额定功率/MW15 柴油发电机组额定转速/(r/min)1 500 柴油发电机组额定频率/Hz50 柴油发电机组额定电压/V400 脉冲负载工况一PPL1=10 MW,T1=20 ms,Dp1=0.4 脉冲负载工况二PPL2=5 MW,T2=40 ms,Dp2=0.5 脉冲负载工况三PPL3=8 MW,T3=25 ms,Dp3=0.6 脉冲负载满载工况PPLmax=10 MW,Tmax=40 ms,Dpmax=0.72
参考文献
[1] 马伟明, 鲁军勇. 电磁发射技术的研究现状与挑战[J]. 电工技术学报, 2023, 38(15): 3943-3959. Ma Weiming, Lu Junyong. Research progress and challenges of electromagnetic launch technology[J]. Transactions of China Electrotechnical Society, 2023, 38(15): 3943-3959.
[2] 严鋆, 王金全, 陈颖, 等. 基于开关函数的脉冲功率负载大信号模型研究[J]. 电工技术学报, 2020, 35(16): 3509-3517. Yan Jun, Wang Jinquan, Chen Ying, et al. Study on large-signal model for pulsed power load based on switching functions[J]. Transactions of China Electro-technical Society, 2020, 35(16): 3509-3517.
[3] Fang Sidun, Wang Yu, Gou Bin, et al. Toward future green maritime transportation: an overview of seaport microgrids and all-electric ships[J]. IEEE Transactions on Vehicular Technology, 2020, 69(1): 207-219.
[4] 侯朋飞, 王金全, 季少卫, 等. 柴油发电机组带雷达脉冲负载暂态特性研究[J]. 现代雷达, 2017, 39(5): 89-93. Hou Pengfei, Wang Jinquan, Ji Shaowei, et al. A study on transient characteristics of diesel generator sets with radar pulsed load[J]. Modern Radar, 2017, 39(5): 89-93.
[5] 贺佳昊, 余墨多, 黄文焘, 等. 舰船脉冲负载间谐波功率自适应补偿方法[J]. 中国电机工程学报, 2025, 45(4): 1575-1586, I0029. He Jiahao, Yu Moduo, Huang Wentao, et al. Adaptive compensation method for interharmonic power of pulse loads on ships[J]. Proceedings of the Chinese Society for Electrical Engineering, 2025, 45(4): 1575-1586, I0029.
[6] 孙东阳, 李爽, 王俊武, 等. 基于虚拟直流电机控制的船舶高频高峰值脉冲负载冲击平抑控制策略研究[J]. 电工技术学报, 2024(20): 6328-6344. Sun Dongyang, Li Shuang, Wang Junwu, et al. Study on virtual DC generator-based ship high-frequency and high-peak power pulsed loads impact damping control strategy[J]. Transactions of China Electro-technical Society, 2024, 39(20): 6328-6344.
[7] 孙国亮, 高路, 周鋆玲, 等. 脉冲负载对独立电力系统运行特性影响[J]. 舰船科学技术, 2023, 45(2): 135-140. Sun Guoliang, Gao Lu, Zhou Yunling, et al. Influence of pulse load on operation characteristics of independent power system[J]. Ship Science and Technology, 2023, 45(2): 135-140.
[8] 刘正春, 朱长青, 王勇, 等. 脉冲负载下电力系统暂稳态功率特性[J]. 电网技术, 2017, 41(9): 3018-3024. Liu Zhengchun, Zhu Changqing, Wang Yong, et al. Transient and steady-state power characteristics of power system with pulsed load[J]. Power System Technology, 2017, 41(9): 3018-3024.
[9] 樊靖轩, 施佳楠, 徐子梁, 等. 基于GaN的开关线性复合高速随动脉冲负载直流变换器[J]. 电工技术学报, 2024, 39(6): 1818-1829. Fan Jingxuan, Shi Jianan, Xu Ziliang, et al. High speed switching-linear hybrid followed-up pulse load DC converter based on GaN device[J]. Transactions of China Electrotechnical Society, 2024, 39(6): 1818- 1829.
[10] 林周宏, 黄文焘, 邰能灵, 等. 舰船脉冲功率负载Buck变换器自适应阻尼比控制方法[J]. 中国电机工程学报, 2024, 44(13): 5246-5257. Lin Zhouhong, Huang Wentao, Tai Nengling, et al. Adaptive damping ratio control method of buck converter for the marine pulsed power loads[J]. Proceedings of the CSEE, 2024, 44(13): 5246-5257.
[11] 吴少聪. DC/DC变换器脉冲负载影响及控制方法研究[D]. 合肥: 合肥工业大学, 2021. Wu Shaocong. Research on pulse load effects and control methods of DC/DC converters[D]. Hefei: Hefei University of Technology, 2021
[12] 庞宇, 黄文焘, 吴骏, 等. 船舶大功率脉冲负载抗冲击供电系统[J]. 上海交通大学学报, 2021, 55(10): 1197-1209. Pang Yu, Huang Wentao, Wu Jun, et al. Surge- suppression power supply system for ship high power pulse loads[J]. Journal of Shanghai Jiao Tong University, 2021, 55(10): 1197-1209.
[13] Gao Xun, Wu Hongfei, Gao Shang, et al. A two-stage pulsed power supply for low-DC-voltage and low-frequency pulsed-current loads[J]. IEEE Transactions on Power Electronics, 2021, 36(2): 2298-2309.
[14] Yao Yu, Kulothungan G S, Krishnamoorthy H S, et al. GaN-based two-stage converter with high power density and fast response for pulsed load applications [J]. IEEE Transactions on Industrial Electronics, 2022, 69(10): 10035-10044.
[15] 尹政, 邓富金, 王青松, 等. 双有源桥变换器移动离散控制集无模型预测电压控制策略[J]. 电工技术学报, 2025, 40(6): 1853-1863. Yin Zheng, Deng Fujin, Wang Qingsong, et al. Model-free predictive voltage control with moving- discrete-control-set for dual active bridge converters [J]. Transactions of China Electrotechnical Society, 2025, 40(6): 1853-1863.
[16] Xiao Qian, Chen Linglin, Jia Hongjie, et al. Model predictive control for dual active bridge in naval DC microgrids supplying pulsed power loads featuring fast transition and online transformer current minimization[J]. IEEE Transactions on Industrial Electronics, 2020, 67(6): 5197-5203.
[17] 孙孝哲, 张祯滨, 韩明昊, 等. 双有源全桥变换器无电流传感器鲁棒预测控制[J]. 电工技术学报, 2024, 39(10): 3093-3104. Sun Xiaozhe, Zhang Zhenbin, Han Minghao, et al. An enhanced current sensorless predictive control for dual active bridge converter[J]. Transactions of China Electrotechnical Society, 2024, 39(10): 3093-3104.
[18] 杨鸣, 汪小丰, 司马文霞, 等. 基于模型预测与复合占空比的双有源全桥变换器电压电流暂稳态调控方法[J]. 电工技术学报, 2025, 40(4): 1203-1220. Yang Ming, Wang Xiaofeng, Sima Wenxia, et al. Transient- and steady-state optimization of voltage and current for dual active bridge converters based on model predictive control and composite duty modulation[J]. Transactions of China Electrotechnical Society, 2025, 40(4): 1203-1220.
[19] 王君瑞, 王瑞, 李琳慧, 等. 基于隔离型三端口DC-DC变换器软开关的模型预测控制策略研究[J/OL]. 电源学报, 2025: 1-13[2025-09-10]. https:// link.cnki.net/urlid/12.1420.tm.20250821.1821.002. Wang Junrui, Wang Rui, Li Linhui, et al. Research on model predictive control strategy based on soft- switching of isolated three-port DC-DC converter [J/OL]. Journal of Power Supply, 2025: 1-13[2025-09-10]. https://link.cnki.net/urlid/12.1420. tm.20250821. 1821.002.
[20] 肖智明, 陈启宏, 张立炎. 电动汽车双向DC-DC变换器约束模型预测控制研究[J]. 电工技术学报, 2018, 33(增刊2): 489-498.Xiao Zhiming, Chen Qihong, Zhang Liyan. Constrained model predictive control for bidirectional DC-DC converter of electric vehicles[J]. Transactions of China Electrotechnical Society, 2018, 33(S2): 489- 498.
[21] Gheisarnejad M, Mohammadzadeh A, Khooban M H. Model predictive control based type-3 fuzzy estimator for voltage stabilization of DC power converters[J]. IEEE Transactions on Industrial Electronics, 2022, 69(12): 13849-13858.
[22] 李劲松, 沈琦丰, 李国锋, 等. 基于残差生成器的Buck双向变换器改进模型预测控制[J]. 电机与控制学报, 2024, 28(10): 85-98. Li Jinsong, Shen Qifeng, Li Guofeng, et al. Improved model predictive control for Buck bi-directional converter based on residual generator[J]. Electric Machines and Control, 2024, 28(10): 85-98.
Abstract Strong electromagnetic pulse loads, such as those used in radar, sonar, and electromagnetic catapults, have become critical equipment in shipbuilding. However, the associated power impact issues have emerged as a bottleneck restricting the development of marine technology. In particular, radar-type pulse loads integrated into shipboard integrated power systems operate under complex and stochastic conditions characterized by high frequency, high amplitude, and continuous periodicity. These loads introduce instantaneous power shocks to the shipboard power system, which can, in severe cases, cause diesel generator sets to desynchronize and shut down.Traditional voltage stabilization control strategies focus solely on regulating the output voltage—a single objective—without considering that excessively stable voltage may instead transfer power impact to the AC side, resulting in power shocks to the diesel generators. Although two-stage converters can serve as buffer circuits and achieve multi-objective control, they present challenges in coordinated control, compromised stability, large volume, and exacerbated spatial constraints onboard, along with difficulties in heat dissipation and poor cost efficiency.Therefore, this paper proposes a multi-objective control strategy for a single-stage converter based on model predictive control with adaptive power reference.
To address this issue, this paper first establishes the single-stage converter topology and analyzes the mismatch mechanism between strong electromagnetic pulse loads and diesel generator sets. It determines that the DC power supply should adopt a multi-objective control strategy to meet both the response characteristics of the diesel generators and the power quality requirements of the pulse load. Key hardware parameters of the power supply are designed based on the energy relationship among the AC input, support capacitor, and pulse load, under the constraints of the control objectives.Secondly, to ensure optimal control performance of the DC power supply under various operating conditions, a predictive model is constructed based on its state-space equations. An objective function is formulated according to the control goals, and optimized to derive the optimal control sequence.Thirdly, by analyzing the coupling relationship between the rate of power change on the AC side and the voltage fluctuation on the load side, an adaptive power reference adjustment rule is designed. A multi-objective control strategy integrating model predictive control with adaptive power reference is thereby developed.
Finally, the effectiveness and reliability of the proposed control strategy are validated using hardware-in-the-loop simulations and a dynamic experimental platform. Simulation and experimental results show that: (1) The conventional voltage stabilization control of single-stage converters meets the power supply accuracy requirements of the pulse load, but transfers the power impact to the AC side, adversely affecting the stable operation of the diesel generator sets. (2) The proposed adaptive power reference-based model predictive control strategy achieves multi-objective control in a single-stage converter. It adjusts the power reference incrementally based on the fluctuation range of the support capacitor voltage, thereby mitigating power impact on the diesel generators. (3) During sudden application/removal, multi-condition switching, and superposition of pulse load conditions, the proposed strategy significantly reduces power impact on the diesel generator side compared to conventional methods, and allows the support capacitor voltage to fluctuate within a reasonable range.
Keywords:Ship integrated power system, impulse loads, surge power mitigation, multi-objective model predictive control, reference value adaptive
DOI: 10.19595/j.cnki.1000-6753.tces.251080
中图分类号:TM762
黑龙江省自然基金联合引导项目资助(L2024E093)。
收稿日期 2025-06-19
改稿日期 2025-07-29
孙东阳 男,1988年生,博士,副教授,研究方向为特种船舶中强冲击平抑方法。E-mail:sundy@163.com
张术宁 男,2000年生,硕士研究生,研究方向为综合船舶电力系统及其稳定控制。E-mail:2320310296@stu.hrbust.edu.cn(通信作者)
(编辑 李 冰)