图1 分布式储能系统结构
Fig.1 Structure of distributed energy storage system
摘要 在基于无下垂控制的分布式储能系统中,各分布式储能单元(DESU)通过稀疏通信网络传递信息,通信延时和计算延时的存在成为系统稳定运行的隐患。为了深入探究延时耦合对稳定性的影响机制,该文建立考虑多DESUs相互通信的分布式储能系统详细小信号状态空间模型,通过特征值法与参与因子法探究通信延时和计算延时与稳定裕度之间的关系,并量化延时对主导模态的影响程度,得到两个重要的发现:①发现了多个DESUs间通信延时的耦合关系,相比单台DESU,两台及以上DESUs通信延时的同时增加会提高主导模态对通信延时的敏感程度,稳定裕度显著降低;②发现了DESU内部的计算延时与通信延时之间的耦合关系:通信延时大于5 ms时,会通过耦合间接提高主导模态中计算延时的参与因子,从而放大计算延时对稳定性的负面影响。由此提出一种用于提高稳定性的延时解耦补偿方法,通过在通信链路中引入超前补偿,有效地降低了通信与计算延时耦合对稳定性的负面影响。最后,通过实验验证理论分析与所提方法的正确性与有效性。
关键词:分布式储能系统 无下垂控制 一致性算法 多延时耦合 稳定性分析
在全球能源结构转型背景下,直流微电网通过整合光伏、风电等可再生能源发电单元,显著地提升了能源的利用效率[1-3]。针对可再生能源固有的间歇性与波动性问题,分布式储能通过灵活调节充放电过程,可有效平抑可再生能源发电与负荷需求的波动,成为目前的研究热点[4-5]。
在分布式储能系统中,常用下垂控制实现各个分布式储能单元(Distributed Energy Storage Unit, DESU)的功率分配和电压稳定[6-7]。然而,在传统的下垂控制中,由于线路阻抗与下垂特性的影响,导致各DESU在电流均分和电压调节之间存在不可避免的矛盾,无法同时实现负载电流共享和母线电压调节[8],于是近年来无下垂控制策略得到广泛的关注。为了克服传统下垂控制的局限性,文献[9]针对直流微电网集群提出一种分布式无下垂合作控制方法,兼顾了储能单元间的能量共享和电压控制。文献[10]考虑荷电状态(State of Charge, SOC),提出一种基于虚拟电流的新型分布式储能系统无下垂控制策略,并通过相邻的稀疏通信交换变量,实现了SOC的快速均衡和输出电流的快速按容量分配。文献[11]提出基于竞争合作机制及改进二分一致性算法(Improved Bipartite Consistency Algorithm, IBCA)的储能系统低损均衡功率分配策略,有效地降低了储能的寿命损耗,实现了功率的快速准确分配。目前,多数研究都是利用基于稀疏通信的一致性算法来设计无下垂控制框架,但随着DESU数量的增加,系统的控制与通信环路中存在着多维度且复杂的耦合,为系统的稳定运行带来新的挑战,因此有必要对基于无下垂控制的分布式储能系统进行稳定性分析。
现有研究从多个角度深入分析了无下垂控制系统的稳定性。文献[12]提出了用于串并联微电网的无下垂控制方案,分析了负荷功率和线路阻抗对系统稳定性的影响。文献[13]在基于一致性原理的无下垂控制器中引入扰动补偿控制,利用特征值分析法和Lyapunov直接法探究了扰动补偿增益对系统稳定性的影响。文献[14]提出一种基于扩散原理的分布式储能控制方法,有效解决母线电压波动和线路阻抗不匹配问题,并探究了如何兼顾SOC收敛速度与电压稳定性。文献[15]利用神经网络(Neural Network, NN)求解无下垂控制储能系统中无穷时域最优控制问题,通过基于强化学习的调优算法将NN权重收敛到系统稳定的最优范围内。文献[16]分析了储能系统调频需求与SOC一致性调节对系统稳定性的影响,并探究了一次调频不同功率需求下的控制参数设计方法。文献[17]利用推导的解析特征值,对比分析了对称和非对称结构设计的无下垂控制系统的稳定性能。
然而,上述研究都是在理想的通信环境下对系统进行稳定性分析,即未考虑不可避免的通信延时及其他通信约束,这类延时约束会直接影响各DESU之间交换信息的能力,甚至危害系统的正常运行[18-19],因此,探究延时参数对系统稳定性的影响具有重要意义。文献[20]基于模态分析法,探究了包含光伏出力、通信延时等多类型控制参数的组合对系统稳定性的影响。文献[21]设计了一种系统频率控制器,搭建了考虑通信延时的闭环传递函数模型,考虑了系统参数的不确定性以及固有的通信延时对系统的影响。文献[22]提出了一种考虑通信延时的模型预测控制(Model Predictive Control, MPC)策略,通过实时仿真得到了维持系统功率平衡与母线电压稳定的通信延时边界。文献[23]利用离散动态一致性算法提出了一种新型无下垂控制框架,推导了所提控制策略的传递函数模型并获得特征值分布,进而分析通信延时和计算延时对系统稳定性的影响。文献[24]在无下垂框架中加入改进的动态扩散算法(Dynamic Diffusion Algorithm, DDA)来估计平均信息,并基于传递函数构建了系统的稳定性分析框架,获取了控制器的积分增益和通信延时变化下系统的根轨迹变化规律。
目前,多数研究采用传递函数模型分析包含延时的储能系统稳定性问题,虽然该类模型具有建模简便的优势,但其仅能表征系统的输入-输出关系,无法准确描述系统内部参数间复杂的耦合机制。因此,针对基于无下垂控制的分布式储能系统,有必要建立全面考虑系统内部变量的小信号状态空间模型,从系统状态变量和参与因子的角度,深入研究延时参数之间多维耦合作用对系统稳定性的影响,为系统的延时补偿设计和稳定性优化提供理论依据。
针对基于无下垂控制的分布式储能系统,本文的主要工作与贡献如下:
(1)考虑DESUs之间相互通信,建立了基于无下垂控制的分布式储能系统小信号状态空间模型,通过特征值与参与因子分析得到影响稳定性的关键因素为DESUs的通信延时和计算延时。
(2)探究了不同通信延时组合下系统主导模态的变化规律:与单台DESU相比,两台及以上DESUs的通信延时同时增加会使主导模态对通信延时的变化敏感,稳定裕度显著减低。
(3)发现了DESU内部的计算延时与通信延时之间耦合作用对系统稳定性的影响:通信延时大于5 ms时,会通过耦合间接提高计算延时在主导模态中的参与因子,使主导模态在相同幅度的计算延时变化时移动更远的距离,不利于系统稳定。
(4)基于延时耦合机理,提出一种多延时解耦补偿方法,通过解耦通信与计算延时的相互作用,有效提高系统稳定性。
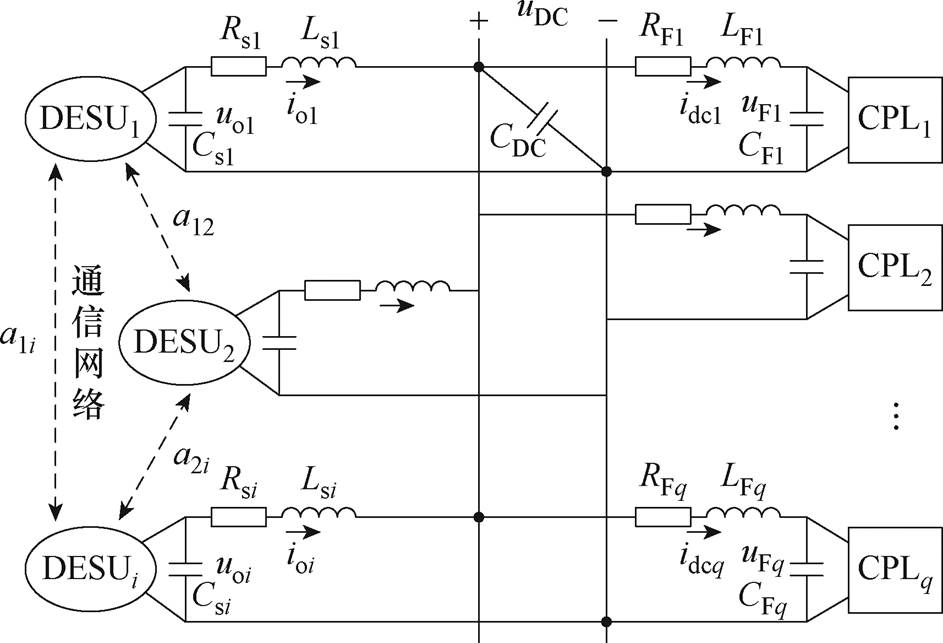
基于无下垂控制的分布式储能系统由DESUs、直流输电线路和恒功率负荷(Constant Power Load, CPL)组成,分布式储能系统结构如图1所示。图1中,a12、a1i和a2i为各DESUs之间通信网络的加权系数;Rsi、Lsi和Csi分别为源侧输电线路的等效电阻、电感和支撑电容;RFq、LFq和CFq分别为荷侧输电线路的等效电阻、电感和支撑电容;CDC为直流母线的支撑电容;uDC为母线电压;uoi和ioi分别为DESUi模块的输出电压和输出电流;uFq和idcq分别为CPLq模块的输入电压和输入电流;下标i=1, 2,…, M,M为DESUs总数;q=1, 2,…, Q,Q为CPLs总数。接下来对各模块进行小信号状态空间建模。
图1 分布式储能系统结构
Fig.1 Structure of distributed energy storage system
DESU模块由储能和双向DC-DC变换器构成,采用基于一致性算法的无下垂控制框架,DESU模块的控制框图如图2所示。
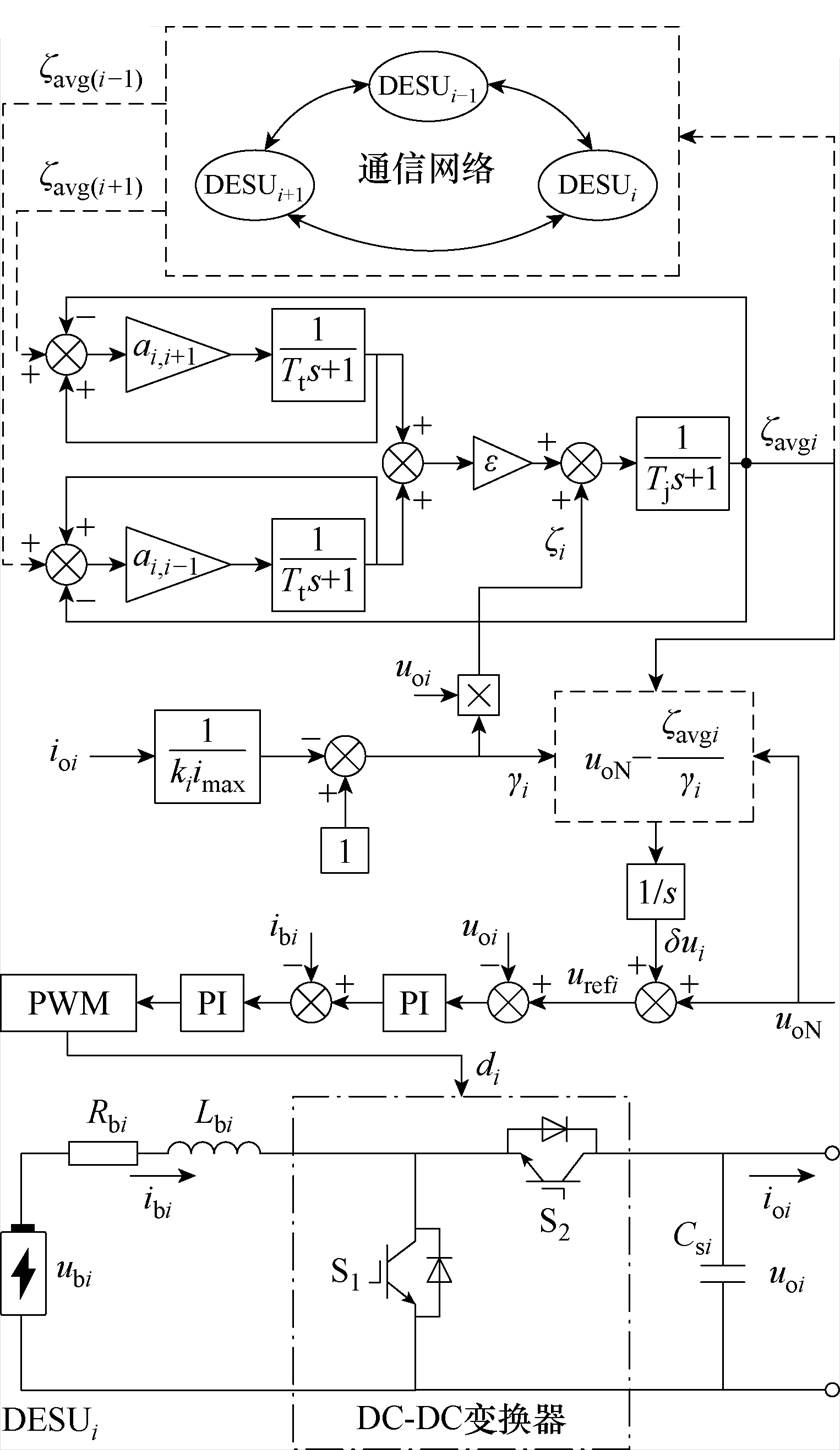
图2 基于无下垂控制的DESU模块控制框图
Fig.2 Control diagram of DESU based on droop-free control
1.1.1 电压补偿与电流分配
DESU引入基于稀疏通信的电压补偿机制,并结合电压-电流双闭环控制,以同时实现电流共享和母线电压快速调节。电压补偿项dui的表达式[23]为
 (1)
(1)
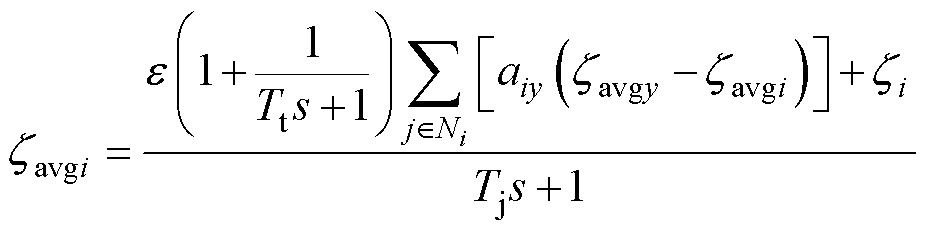
式中,uoN为DESU模块输出电压的额定值;zavgi为DESUi的平均虚拟状态变量,即各DESU之间唯一的通信信息;gi为转移因子,表达式为
 (2)
(2)
式中,imax为变换器的最大电流;ki为电流分配系数。
1.1.2 考虑通信延时和计算延时的一致性算法
一致性算法通常采用离散时间间隔Ts进行采样实现[25],由于DESU本身具有低惯性和通信约束,DESU之间的通信延时和计算延时对控制性能的影响不容忽视[26]。因此,zavgi的表达式[27]为
 (3)
(3)
其中

式中,下标y=1, 2,…, M;zavgi(k)和zavgi(k+1)分别为DESUi在第k次和第k+1次迭代中的平均虚拟状态变量;zavgy(k)为DESUy在第k次迭代中的平均虚拟状态变量;Diy(k)和Diy(k+1)分别是第k次和第k+1次迭代中DESUi和DESUy之间差值的累积项;e为通信权重;t为系统延时,当t<Ts时,一致性算法的收敛速率基本不变[25];aiy为DESU模块中通信网络加权邻接矩阵Aiy中的元素,若DESUi和DESUy之间存在通信关系,则aiy=ayi=1;若不存在通信关系,则aiy=ayi=0[20];zi为虚拟状态变量,表达式为
 (4)
(4)
为了确保一致性算法快速收敛及其稳定性,需要选取合适的通信权重e,e定义[28]为
 (5)
(5)
式中,L为通信拓扑的拉普拉斯矩阵;l1(L)和lN-1(L)分别为矩阵L的最大特征值和次小特征值。
同时,由于时滞环节e-Ts在建模时引入了超越方程,使系统中存在无穷多个特征根,显著增加了稳定性分析的复杂程度。因此,采用惯性环节对e-Ts进行近似处理[24, 29],该近似在分布式控制系统的典型工作频段内具有良好适用性[30-31]。时滞环节的传递函数改写为
 (6)
(6)
式中,Tt为不同DESU之间的通信延时,主要受通信方式、距离以及通信线路结构的影响[32];Tj为DESU的内部的计算延时,主要取决于控制器的采样频率、运算能力以及算法复杂度[33];s为Laplace算子。
因此,结合图2的通信结构,式(3)可改写为
 (7)
(7)
图1所示的分布式储能系统模型中,通信网络拓扑与邻接矩阵Aiy如图3所示,由于每个DESU只需与相邻DESUs交换信息,故认为图3中Aiy的非0元素值均为1。
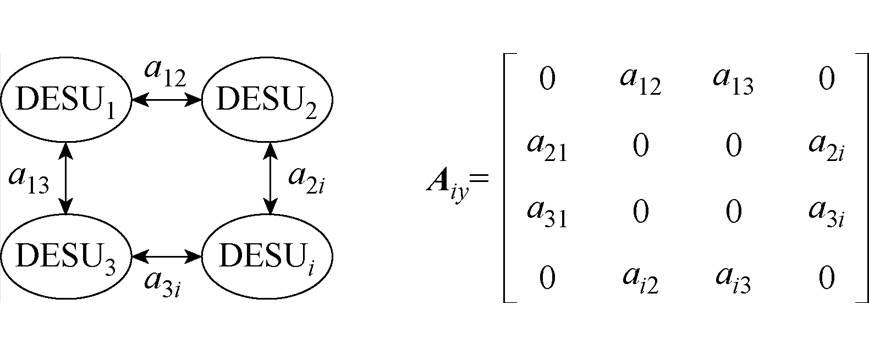
图3 通信网络与邻接矩阵
Fig.3 Communication network and adjacency matrix
1.1.3 变换器的控制占空比
根据图2,可得到DESU模块中母线电压参考值urefi、结合电压电流双闭环控制得到双向DC-DC变换器的占空比di分别为
 (8)
(8)
 (9)
(9)
式中,kpui和kiui分别为PI电压外环的比例系数和积分系数;kpii和kiii分别为PI电流内环的比例系数和积分系数;ibi为DESU模块变换前的电流。
1.1.4 DESU模块的小信号状态空间模型
根据式(1)~式(9),得到DESU模块的状态空间模型为
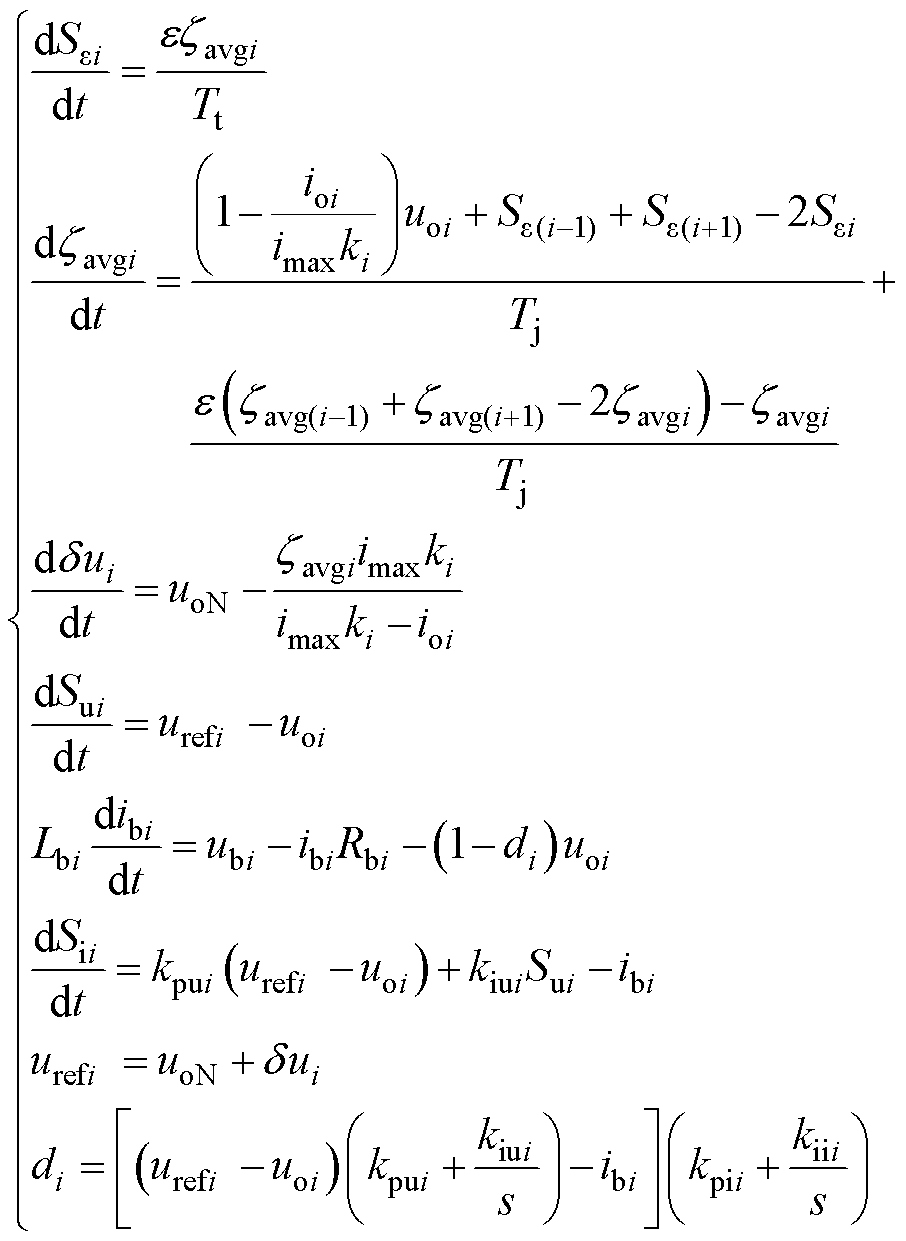 (10)
(10)
式中,Sei为平均虚拟状态变量经过延时环节后的同步误差;Sui为电压外环的积分过程;Sii为电流内环的积分过程;ubi为DESU模块变换前的电压;Rbi和Lbi分别为DESU模块的寄生电阻和滤波电感。
同时,根据式(10)的状态空间模型可知,通信延时Tt与计算延时Tj之间存在着物理方面的耦合关系:通信延时Tt的增大会延缓通信信息的传递,导致同步误差Sei的累积;而计算延时Tj会直接影响本地控制指令的响应速度,使本地信息zavgi更新滞后,从而降低系统的动态响应能力。更重要的是,通信延时Tt和计算延时Tj通过两个方程中的交叉项Sei和zavgi产生耦合作用,通信延时Tt影响相邻单元信息的同步性,而计算延时Tj则制约着这些信息的处理速度,二者共同决定了系统的整体稳定性。
由式(10)可推导出DESU的小信号模型为
 (11)
(11)
式中,Dxb为DESU模块的状态向量,Dxb=[DSeiDzavgi Ddui Dibi DSui DSii]T;Dxo=[Duoi Dioi]T;D表示状态变量;Ab、Bb为DESU模块的系数矩阵。
CPL模块通过Buck变换器与直流母线连接,并采用电压电流双闭环控制来稳定负荷电压[34],CPL模块的小信号模型为
 (12)
(12)
式中,DxL为CPL模块的状态向量,DxL=[DiLqDuLqDSuLqDSiLq]T,uLq为CPL电压,iLq为CPL电流;SuLq为PI电压外环的积分过程,SiLq为PI电流内环的积分过程;DxF=[DuFq]T;AL、BL为CPL模块的系数矩阵。
直流输电线路等效为p型RLC阻抗模型,并以放射状拓扑连接DESUs模块和CPLs模块[35],输电线路的小信号模型为
 (13)
(13)
式中,Dxd为直流输电线路的状态向量,Dxd=[DuoiDioiDuFqDidcqDuDC]T;E为输电线路的系数矩阵,见附录式(A3)。
所建立的基于无下垂控制的分布式储能系统模型如图1所示,综合式(11)~式(13),得系统的小信号模型为
 (14)
(14)
式中,Dxsys为系统的状态向量,Dxsys=[DxbDxLDxd]T;Asys为系统的系数矩阵,具体表示为
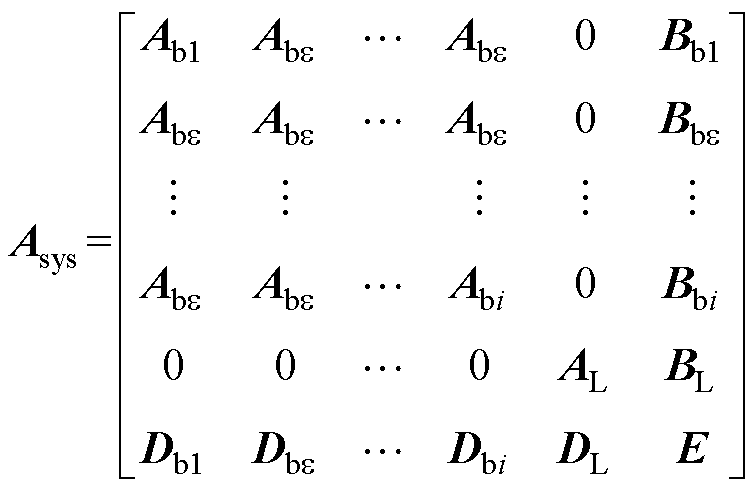 (15)
(15)
式中,Db为DESU模块的系数矩阵;Abe为DESU模块系数矩阵中的通信部分,见附录式(A1);DL为CPL模块的系数矩阵,见附录式(A2);方程中状态变量的下标0指的是稳态值。
式(15)中系数矩阵Asys的特征值通常用于研究系统的稳定性和动态响应。实特征值对应为非振荡模态,复共轭特征值则对应为振荡模态,其中,实部最大的振荡模态对系统的响应最为敏感,视为系统的主导模态[36-37],表达式为
 (16)
(16)
式中,lu为系统的振荡模态,u=1, 2,…, U,U为振荡模态总数;ldom为主导模态;Rdom和Idom分别为主导模态的实部和虚部。
为了探究系统主导模态与状态变量之间的联系,利用参与因子法求解状态变量对主导模态的影响程度[38],参与因子可通过系数矩阵Asys的左、右特征向量求出,表达式为
 (17)
(17)
式中,pzx为第z个状态变量对模态x的影响水平,z=1, 2,…, m,m为状态变量总数;fzx为系统系数矩阵的左特征向量中第z个元素;jxz为系统系数矩阵的右特征向量中第z个元素。
在式(17)的基础上引入状态变量参与因子评价指标,hz为第z个状态变量对主导模态的参与因子,表达式为
 (18)
(18)
以三台DESUs和四台CPLs为例对系统稳定性进行详细分析,系统参数见表1,将参数代入Asys中计算特征值,可得到系统的振荡模态分布,如图4所示。其中,l1和l2最接近虚轴,为系统的主导模态,主导模态的参与因子分析如图5所示,可知主导模态主要与DESU内部的状态变量DSei、Dzavgi、Ddui和DSui有关。其中,由式(10)可知,DSei和Dzavgi为DESU模块中与通信环节相关的状态变量,其动态特性会直接影响经过通信环节后输出电压相关变量Ddui和DSui的响应。说明系统的稳定性和动态响应主要与DESU模块的参数有关,尤其是通信环节中的延时参数。
表1 系统参数
Tab.1 System parameters
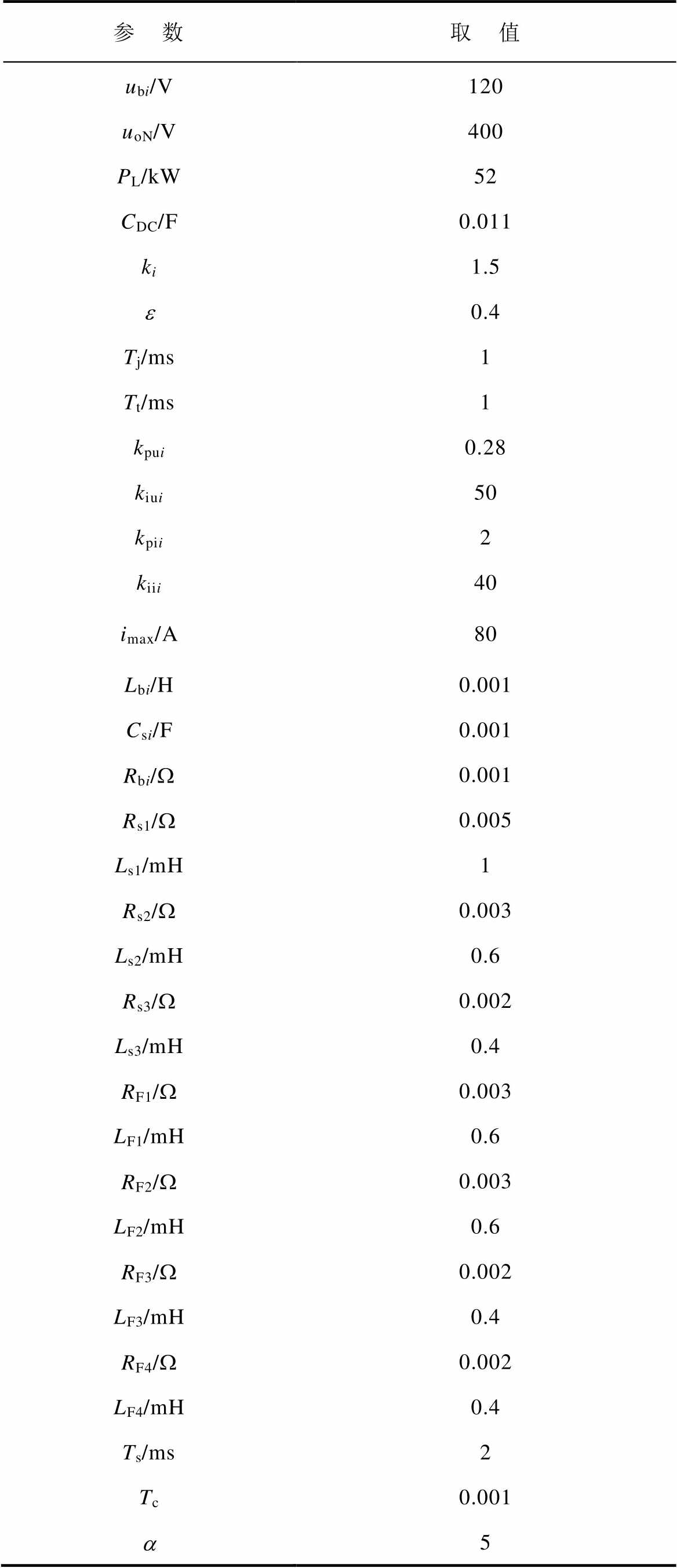
参 数取 值 ubi/V120 uoN/V400 PL/kW52 CDC/F0.011 ki1.5 e0.4 Tj/ms1 Tt/ms1 kpui0.28 kiui50 kpii2 kiii40 imax/A80 Lbi/H0.001 Csi/F0.001 Rbi/W0.001 Rs1/W0.005 Ls1/mH1 Rs2/W0.003 Ls2/mH0.6 Rs3/W0.002 Ls3/mH0.4 RF1/W0.003 LF1/mH0.6 RF2/W0.003 LF2/mH0.6 RF3/W0.002 LF3/mH0.4 RF4/W0.002 LF4/mH0.4 Ts/ms2 Tc0.001 a5
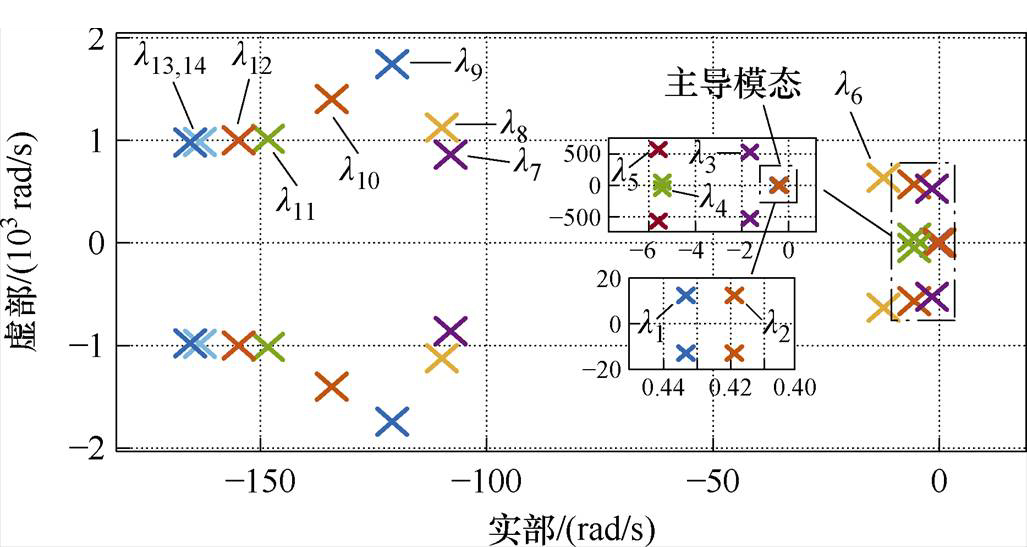
图4 系统振荡模态分布
Fig.4 Oscillatory modes distribution of the system
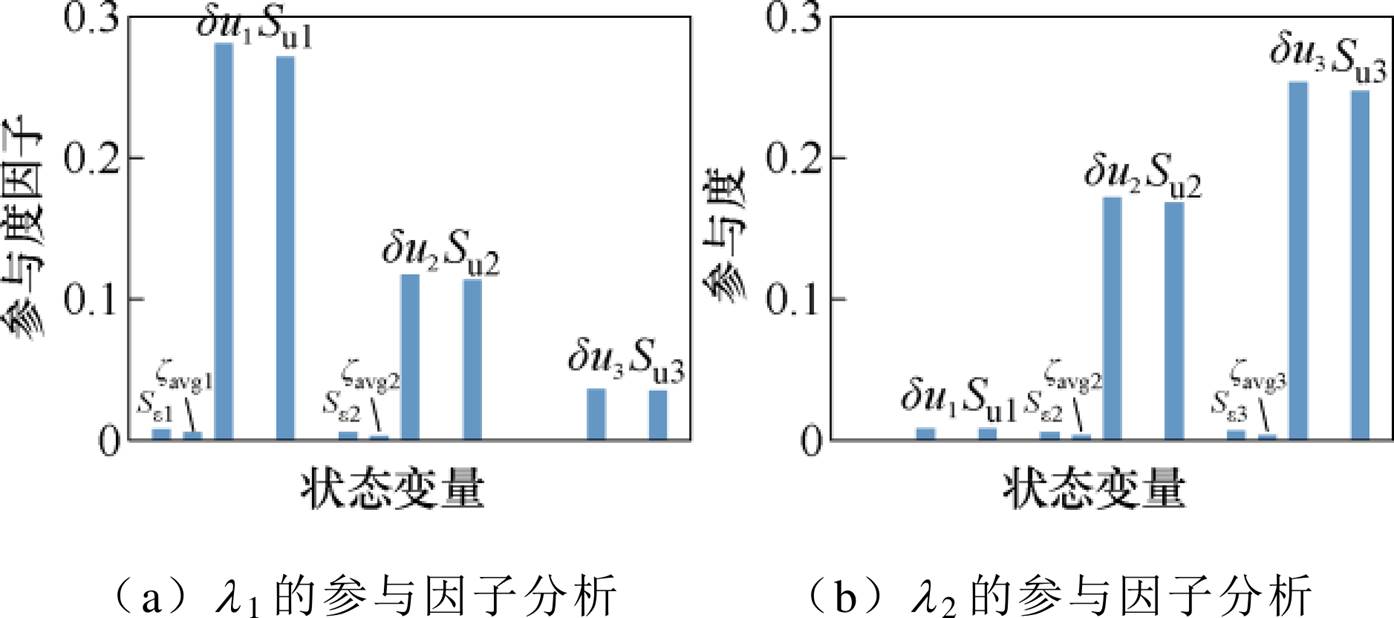
图5 主导模态的参与因子分析
Fig.5 Participation factor analysis of dominant modes
为了探究各DESU之间通信延时的变化对系统稳定性的影响,图6给出了三个DESUs的通信延时Tt,1、Tt,2和Tt,3在1~20 ms范围内系统的稳定裕度,稳定裕度用主导模态l1和l2的实部到虚部的距离来表示[39]。图7展示了1台、2台及3台DESUs的通信延时依次增加时,系统主导模态的根轨迹变化。可以看出,1台DESU的通信延时增加时,主导模态在复平面中移动距离很小,即系统的稳定裕度变化不大,如图7a所示;而当2台或更多DESUs的通信延时增加时,如图7b、图7c所示,主导模态发生了显著移动,图7b中,l2移动到了复平面的右边,图7c中,l1和l2都移动到了复平面的右边,且移动距离是图7a中单个DESU延时增加时的5倍,说明系统各DESUs之间通信延时的增加不利于系统稳定,且相比起单台DESU,多台DESUs的通信延时同时增加时,系统稳定裕度会显著降低。
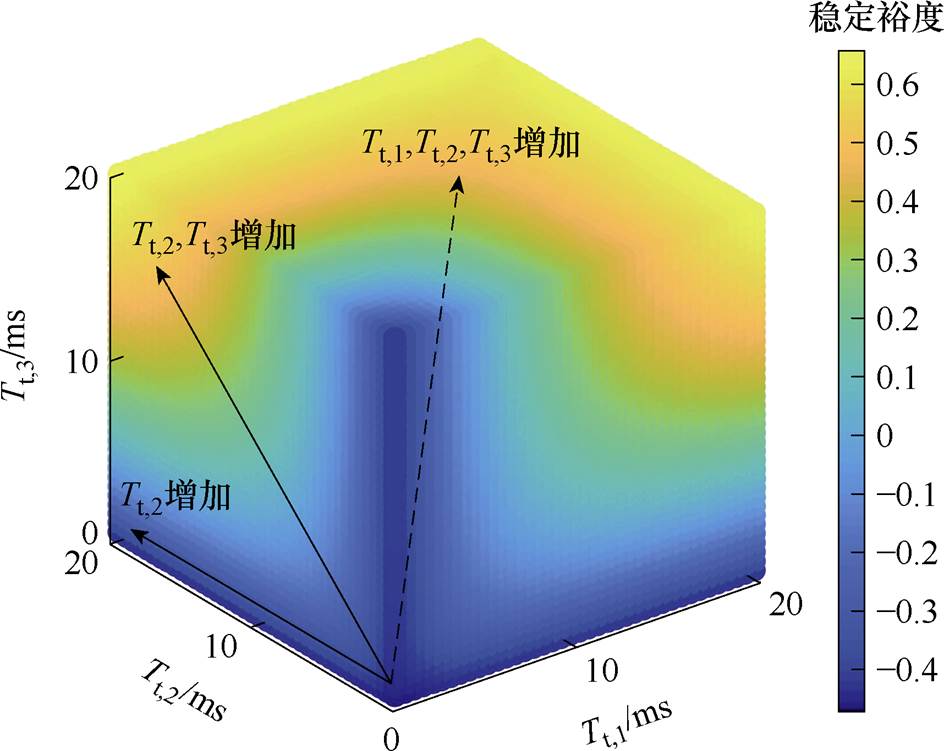
图6 DESUs之间通信延时变化下系统的稳定裕度
Fig.6 Stability margin of the system under the change of communication delay between DESUs
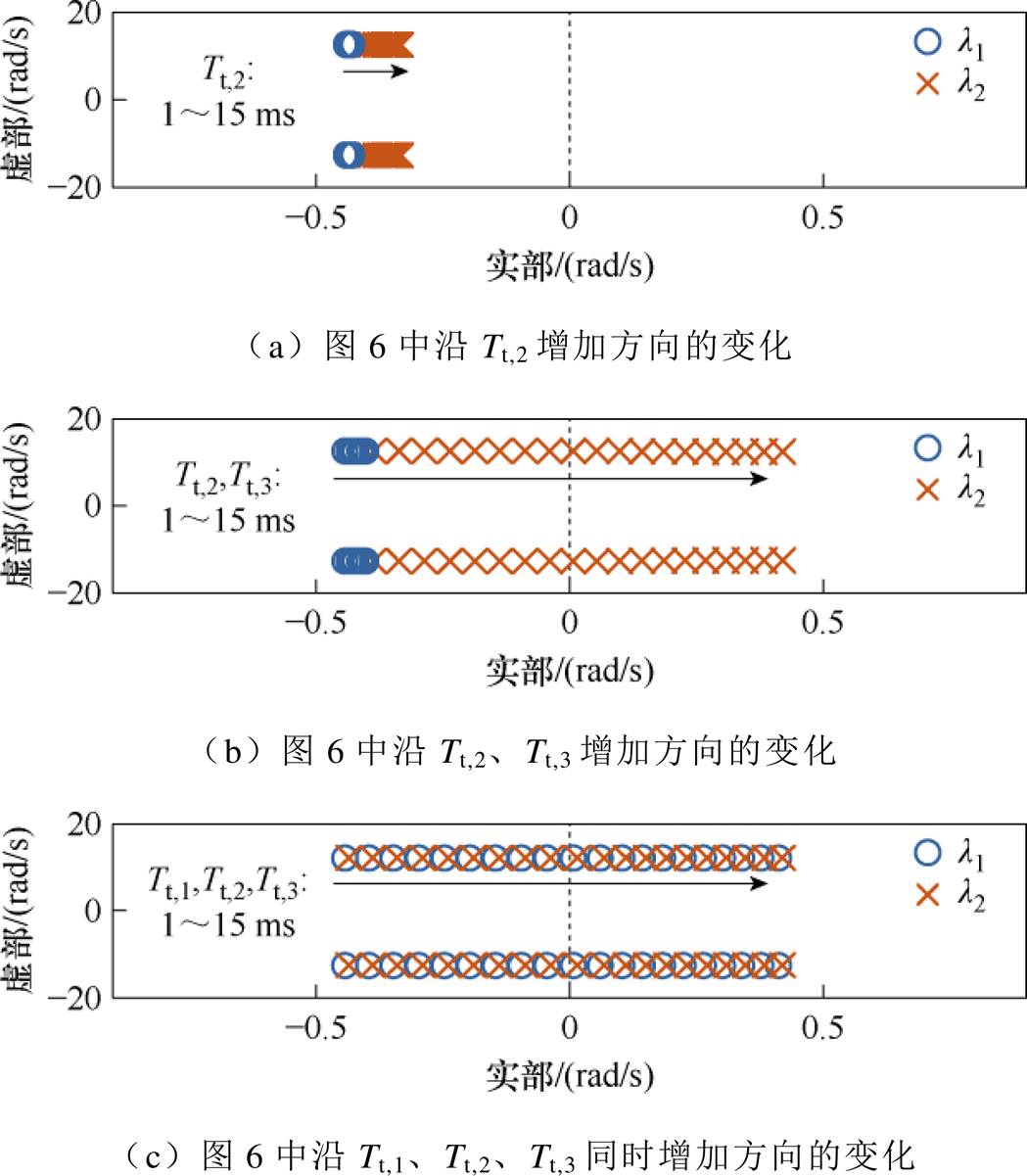
图7 DESUs之间通信延时变化下的根轨迹分析
Fig.7 Root trajectory analysis under the change of communication delay between DESUs
进一步地,为了探究DESU内部计算延时与通信延时之间的耦合交互作用对系统稳定性的影响,设各DESU拥有相同的计算延时Tj与通信延时Tt[40]。图8为Tt和Tj在1~20 ms范围内系统的稳定裕度,图9展示了主导模态在Tt和Tj分别从3 ms增加到15 ms时的根轨迹。可见随着系统的计算和通信延时增加,主导模态逐渐向虚轴靠近,在Tt>7.5 ms时,主导模态移动到复平面右边,这表明较大的通信和计算延时会直接导致系统不稳定。而在实际工程中,DESU之间的通信延时受节点之间距离影响,通常在几ms至几百ms之间[26]。因此,综合考虑理论分析与工程实际,在理论稳定阈值7.5 ms的基础上保留一定的裕度,本文将通信延时足够小的阈值定义为5 ms。同时,通过图9发现,在通信延时Tt<5 ms时,主导模态对计算延时Tj的变化并不敏感,在复平面内的移动幅度很小,而随着Tt的增加,主导模态在Tj变化下的移动幅度逐渐增大,说明Tj对系统稳定性的影响随Tt的升高而 增强。
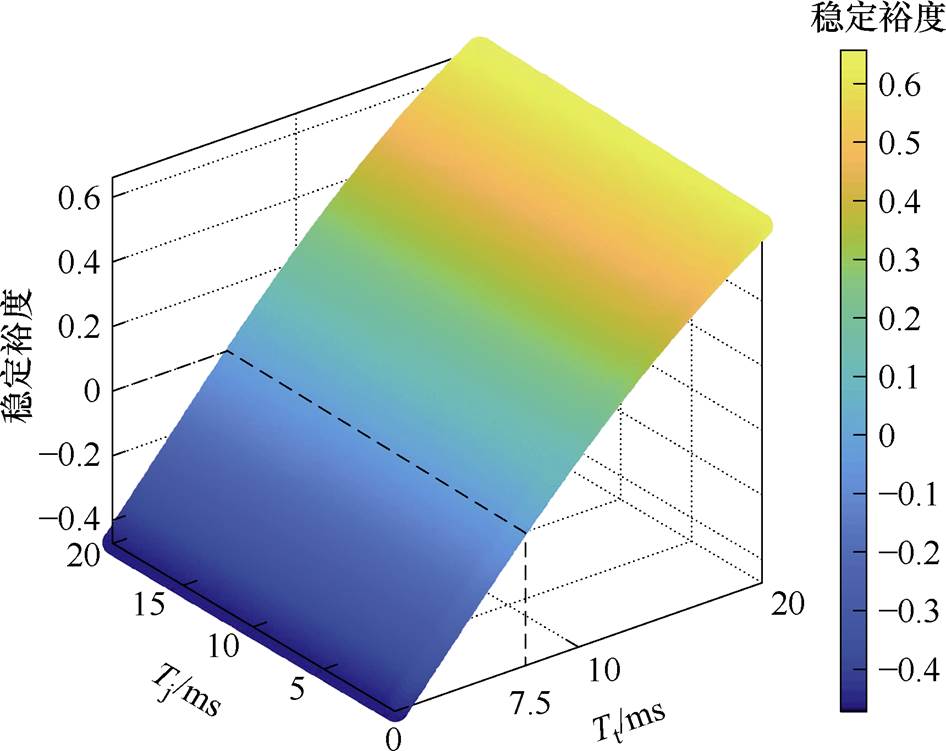
图8 通信延时与计算延时变化下系统的稳定裕度
Fig.8 Stability margin of the system under the change of communication delay and calculation delay
为了解释上述现象,本节利用参与因子法分析延时参数之间的耦合机制,进而获得系统稳定性变化的本质机理。
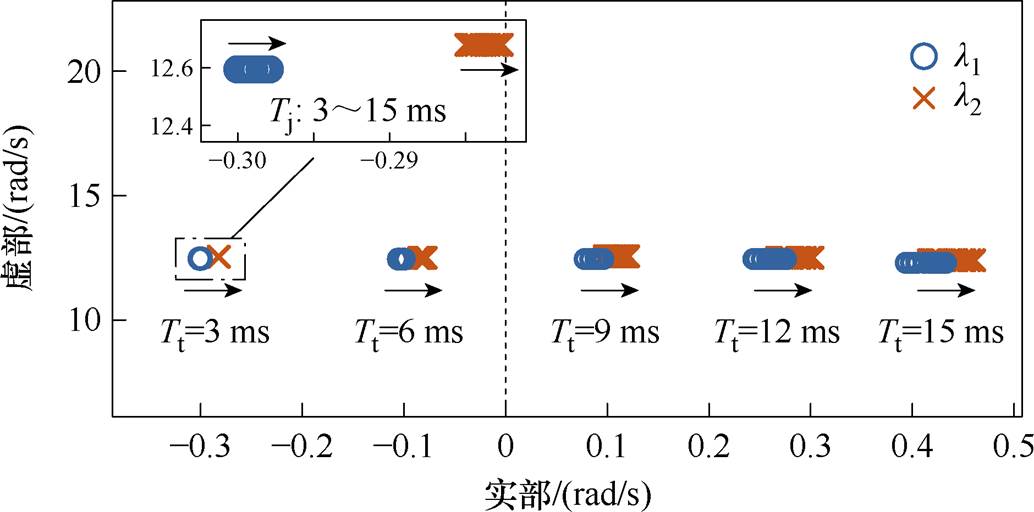
图9 通信延时与计算延时变化下根轨迹分析
Fig.9 Root trajectory analysis under the change of communication delay and calculation delay
2.3.1 多源通信延时之间耦合机理分析
图10分析了主导模态l1和l2在各DESU之间通信延时变化下的参与因子。由式(10)可知,Se1、Se2和Se3分别为三个DESUs中与通信延时Tt强相关的状态变量,zavg1、zavg2和zavg3分别为三个DESUs中与计算延时Tj强相关的状态变量。由图10a可以看出,在只增加1台DESU的通信延时Tt的情况下,l1和l2的参与因子变化幅度很小,导致其仅会发生较小距离的移动(见图7a),因此1台DESU的Tt变化对主导模态的影响有限;而在同时增加2台DESUs的Tt的情况下,如图10b所示,2台DESUs通信延时之间的耦合作用增强,使l2中Tt相关因子Sei的参与因子显著增加,此时l2对Tt的变化更加敏感,导致其会随着Tt的增加而向右移动更远的距离(见图7b),系统的稳定裕度显著降低;同理,在同时增加3台DESUs的Tt的情况下,如图10c所示,3台DESUs的通信延时之间存在的耦合作用更加复杂,会同时增加l1和l2中Tt相关因子Sei的参与因子,导致两个主导模态均会向右显著移动(见图7c),更不利于系统稳定。
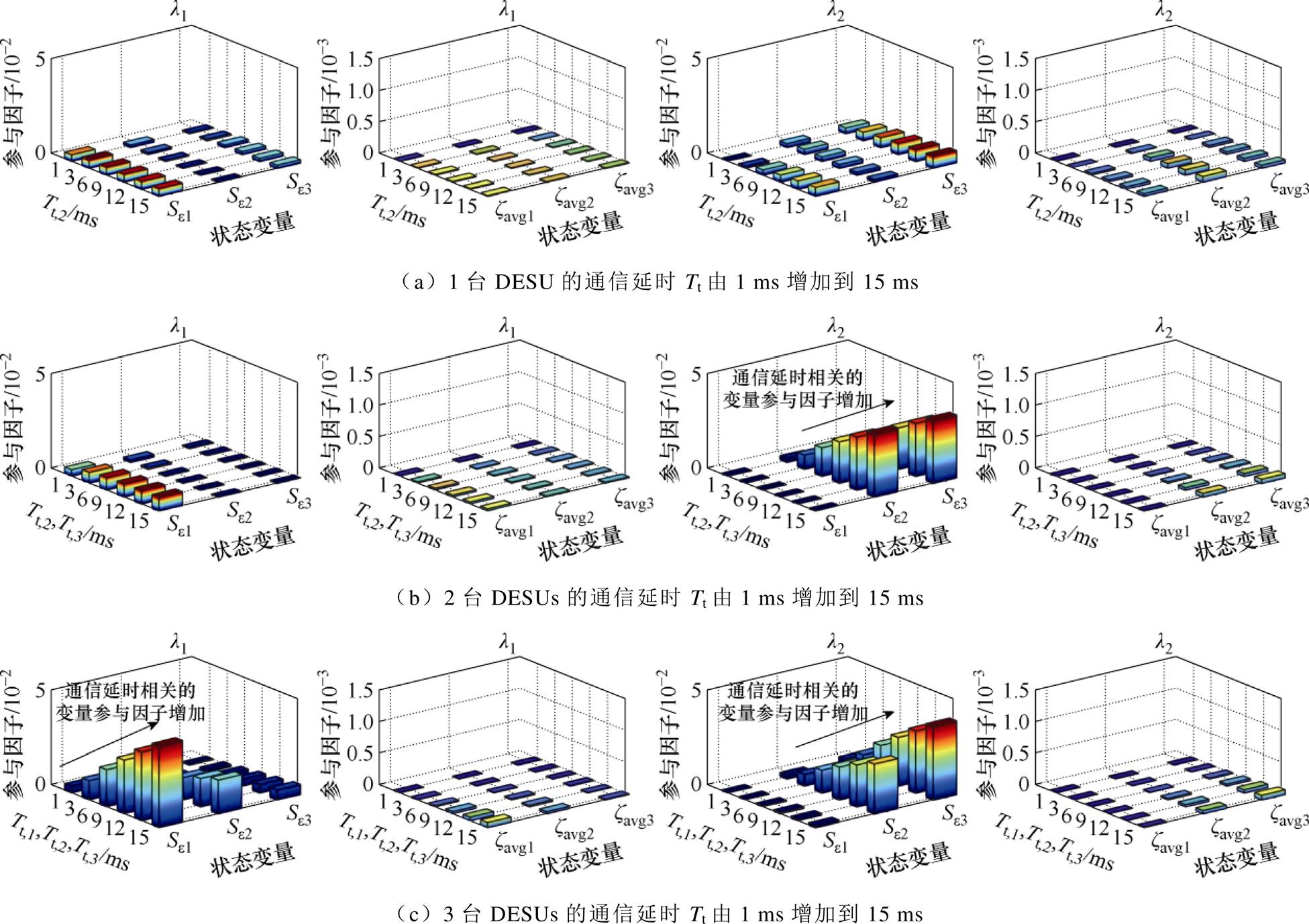
图10 DESUs之间通信延时变化下主导模态的参与因子分析
Fig.10 Participation factor analysis of the dominant modes under the change of communication delay between DESUs
2.3.2 通信与计算延时之间耦合机理分析
图11分析了主导模态在各DESU内部的计算延时Tj与通信延时Tt共同变化下的参与因子。由图11a可以看出,在Tt较小,即小于5 ms时,Tj的变化几乎不会对两个主导模态的参与因子产生影响,且此时Tj相关因子zavgi的参与因子很低,故l1和l2几乎不会发生移动(见图9中Tt=3 ms的情况);而在Tt>5 ms的情况下,如图11b所示,两个主导模态中Tj相关因子zavgi的参与因子随着Tj的增加而明显增加,故此时l1和l2对计算延时Tj的变化更加敏感,随着Tj的增加而向右显著移动(见图9中Tt=15 ms的情况),系统稳定裕度显著降低;图11c则将Tj固定为15 ms,在Tt由1 ms增加到15 ms过程中发现,Tt的增加不仅提升了其自身参与因子Sei对主导模态的影响,还通过耦合放大了Tj相关因子zavgi的贡献。说明Tt的增加会显著提升系统对通信延时和计算延时的敏感度,不利于系统稳定。基于此,提出了延时参数的设计规则:在通信延时小于5 ms的场景下,可放宽计算延时的约束要求。因为此时二者的耦合程度较弱,对稳定性的影响不大。
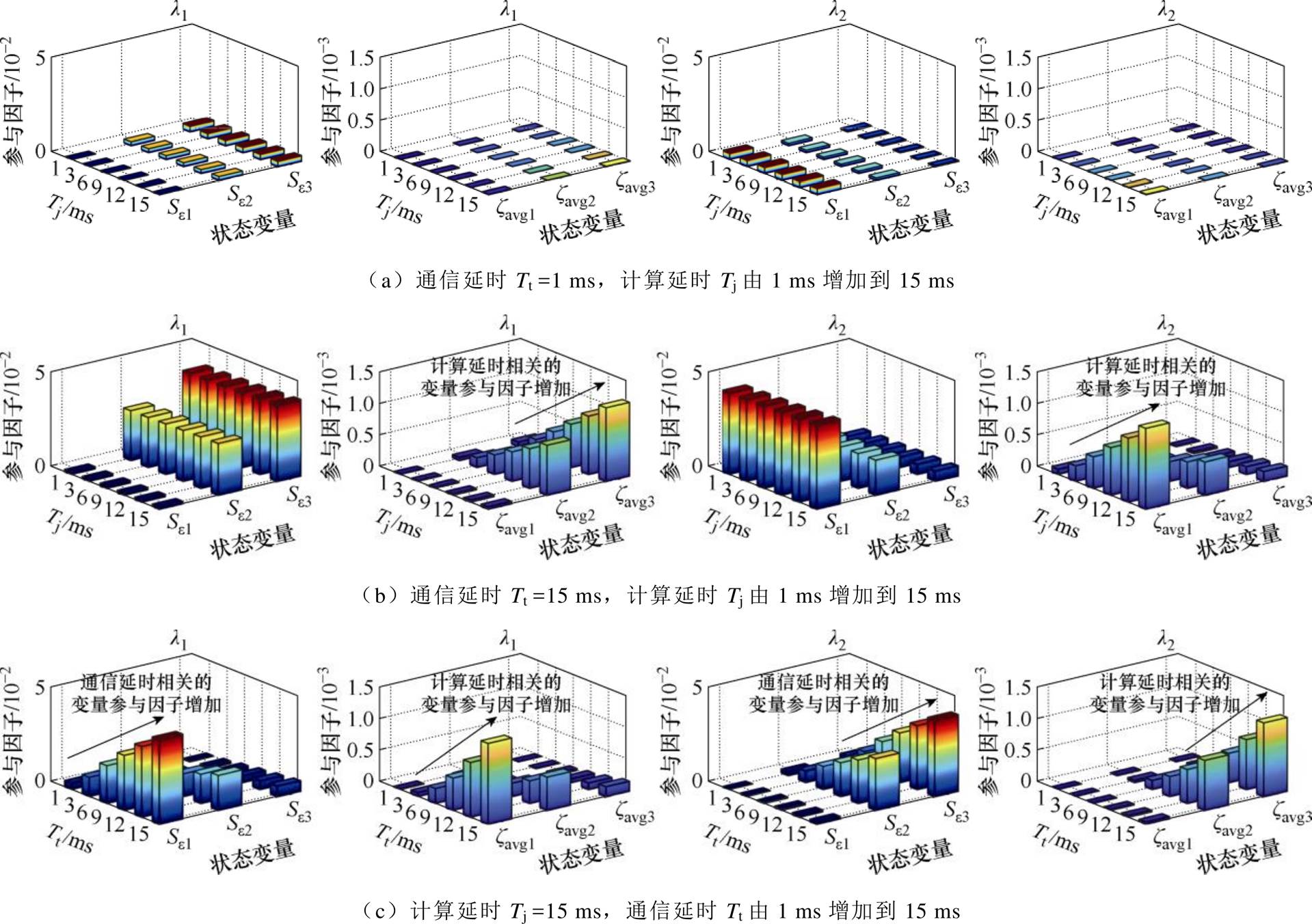
图11 DESU内部的计算延时与通信延时共同变化下主导模态的参与因子分析
Fig.11 Participation factor analysis of the dominant modes under the change of calculation delay and communication delay in DESU
2.3.3 延时耦合机理的普适性分析
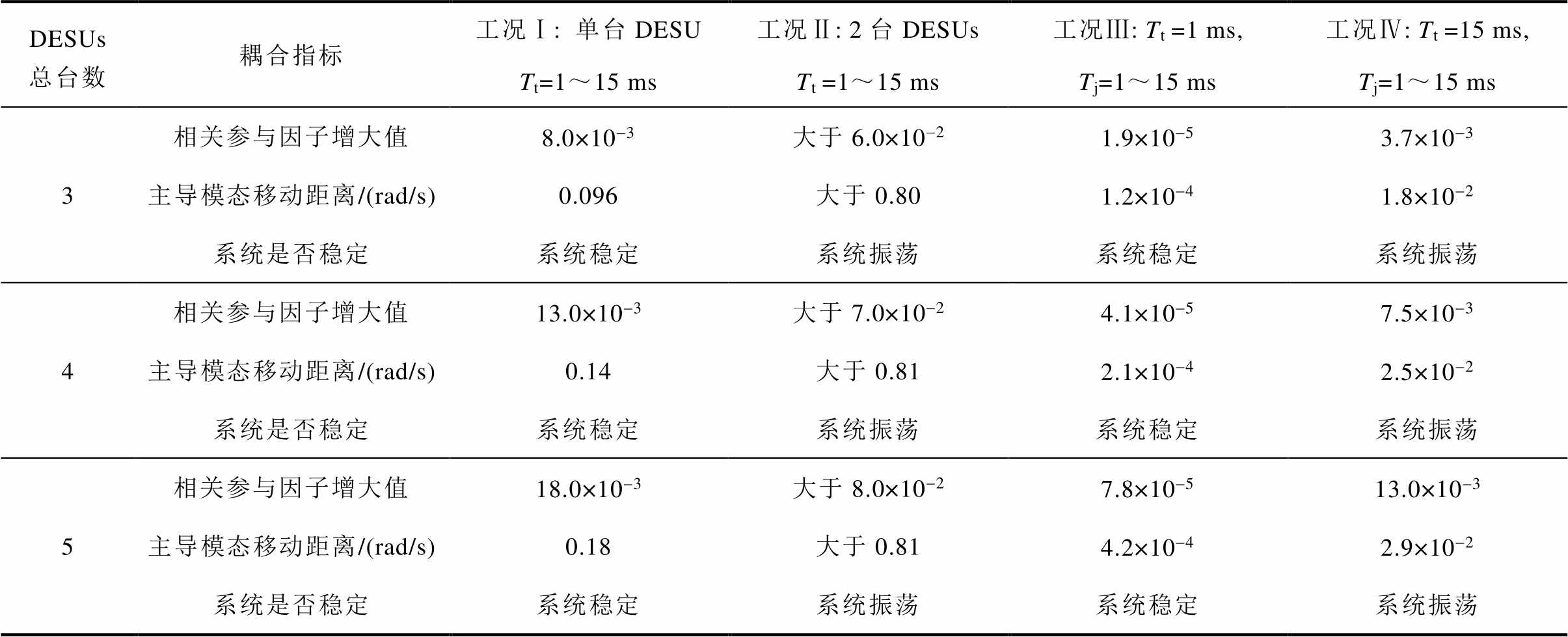
为进一步探究延时耦合机理的普适性,表2展示了DESUs总数增加的情况下对该机理的验证结果。其中,工况Ⅰ和工况Ⅱ对多台DESUs通信延时之间的耦合机理普适性进行了验证。由工况Ⅰ可见,当仅增加单台DESU的通信延时Tt时,3、4、5台DESUs系统的主导模态中Tt相关参与因子增幅均较小,分别为8.0×10-3、13.0×10-3和18.0×10-3,因此系统稳定裕度变化不大,主导模态分别移动0.096、0.14和0.18 rad/s,系统保持稳定。而在工况Ⅱ中,2台DESUs的通信延时Tt同时增加时,3、4、5台DESUs系统的主导模态中Tt相关因子参与因子分别显著提升了6.0×10-2、7.0×10-2和8.0×10-2,较工况Ⅰ提高了约1个数量级,加剧了多台DESUs之间通信延时的耦合,主导模态的右移幅度分别为0.80、0.81和0.81 rad/s,并移动至复平面右侧,引发系统振荡。值得注意的是,当通信延时增加的DESUs台数从2台增至3台及以上时,此时通信延时之间的耦合作用更加复杂,系统主导模态的Tt相关因子参与因子和复平面中右移幅度均大于2台DESUs的情况,更不利于系统稳定。
表2 延时耦合机理的普适性分析
Tab.2 Universal analysis of delay coupling mechanism
DESUs总台数耦合指标工况Ⅰ: 单台DESU工况Ⅱ: 2台DESUs工况Ⅲ: Tt=1 ms,工况Ⅳ: Tt=15 ms, Tt=1~15 msTt=1~15 msTj=1~15 msTj=1~15 ms 3相关参与因子增大值8.0×10-3大于6.0×10-21.9×10-53.7×10-3 主导模态移动距离/(rad/s)0.096大于0.801.2×10-41.8×10-2 系统是否稳定系统稳定系统振荡系统稳定系统振荡 4相关参与因子增大值13.0×10-3大于7.0×10-24.1×10-57.5×10-3 主导模态移动距离/(rad/s)0.14大于0.812.1×10-42.5×10-2 系统是否稳定系统稳定系统振荡系统稳定系统振荡 5相关参与因子增大值18.0×10-3大于8.0×10-27.8×10-513.0×10-3 主导模态移动距离/(rad/s)0.18大于0.814.2×10-42.9×10-2 系统是否稳定系统稳定系统振荡系统稳定系统振荡
该结果与2.3.1节的耦合机理分析一致,即较单台DESU而言,2台及以上DESUs的通信延时同时增加,会使系统对通信延时的敏感程度提高至少1个数量级,系统稳定裕度显著减低。
同理,工况Ⅲ和工况Ⅳ对通信与计算延时之间的耦合机理普适性进行了验证。由工况Ⅲ可见,在通信延时小于5 ms时,Tj的变化仅使主导模态产生微小移动,3、4、5台DESUs系统中主导模态的移动距离分别为1.2×10-4、2.1×10-4和4.2×10-4 rad/s。而在工况Ⅳ通信延时大于5 ms的情况下,主导模态的相关因子参与因子均会随着Tj的增加而显著提升,此时主导模态的移动距离分别为1.8×10-2、2.5×10-2和2.9×10-2 rad/s,较工况Ⅲ增加了约2个数量级,不利于系统稳定。
该结果与2.3.2节的耦合机理分析一致,即通信延时大于5 ms时,会增强DESU内部计算与通信延时之间的耦合程度,显著放大计算延时对系统稳定性的不利影响。
根据第2节所分析的通信与计算延时耦合机理,可知两者对稳定性的影响程度主要取决于通信延时的大小。因此,针对无下垂控制的DESUs,仅对通信延时通道进行选择性的补偿,即可解耦通信与计算延时之间的相互作用,有效提高系统稳定性。
所提方法的控制框图如图12所示。Gc为解耦补偿函数,表示为
 (19)
(19)
式中,a为解耦补偿增益;Tc为时间常数。
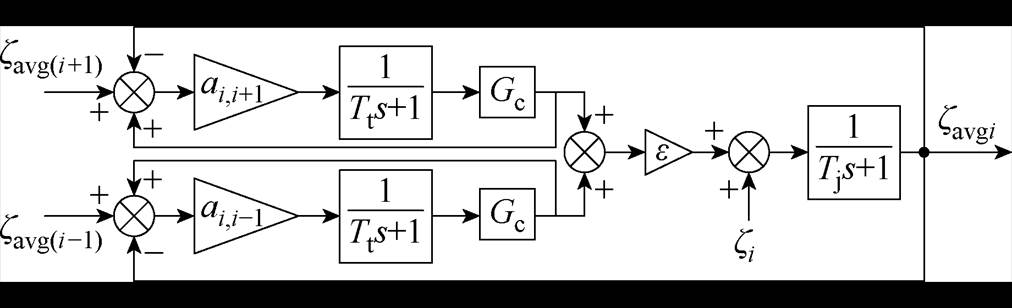
图12 引入所提方法后DESU通信环节的控制
Fig.12 Control of the communication link with the proposed method in DESU
为验证上述理论分析与所提方法的正确性与有效性,基于RT-Lab OP5707和DSP F28379D控制器搭建了基于无下垂控制的分布式储能系统实验平台,如图13所示。共进行9个实验,包括8个工况。
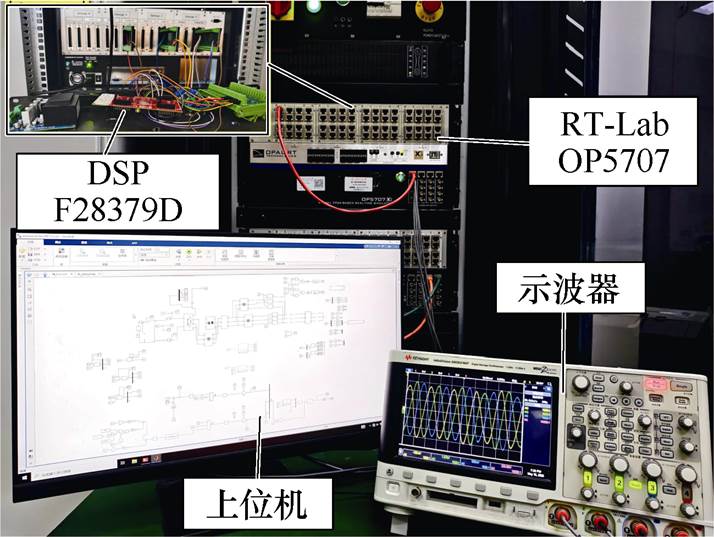
图13 硬件在环实验平台
Fig.13 Hardware-in-the-loop experimental
为验证各DESUs之间通信延时Tt对系统稳定性的影响,在保持较小的计算延时Tj=1 ms且不变的前提下,工况设置见表3。
表3 实验1的工况
Tab.3 Conditions of experiment 1 (单位: ms)
工况Tt,1Tt,2Tt,3Tj,1Tj,2Tj,3 1111111 21301111 313030111
分别在t=5 s和t=10 s时切换工况,实验1的波形与模态分析如图14所示。在工况1时,由于系统具有较低的通信延时Tt和计算延时Tj,各DESU的输出电流能较快收敛到平均值,同时母线电压保持稳定。
在t=5 s时,增加单台DESU2的通信延时Tt,2,可见在复平面内主导模态仅向右移动了0.1 rad/s的距离,如图14c所示。原因是单台DESU的参数变化不会增加DESU之间延时参数的耦合程度,如第
2节所述。此时主导模态中Tt相关因子的参与因子仅增加了8.4×10-3,如图14d所示,这对系统稳定性的影响有限,因此系统依然可以保持稳定。
而在t=10 s增加DESU3的通信延时Tt,3后,如图14b所示,各DESU的输出电流发散振荡,无法收敛,并最终导致母线电压出现振荡,振荡频率为2 Hz,振幅为35 V,与图14c中主导模态的理论振荡频率1.89 Hz基本一致。原因是2台DESUs的通信延时增加会提高不同DESUs通信延时之间的耦合程度,如第2节所述。导致主导模态l2中Tt相关因子的参与因子显著增加了8.6×10-2(较工况2提高了约1个数量级,如图14d所示),此时l2对Tt的变化更加敏感,向右移动了1.3 rad/s并移动至复平面右侧,如图14c所示,诱发了系统振荡。
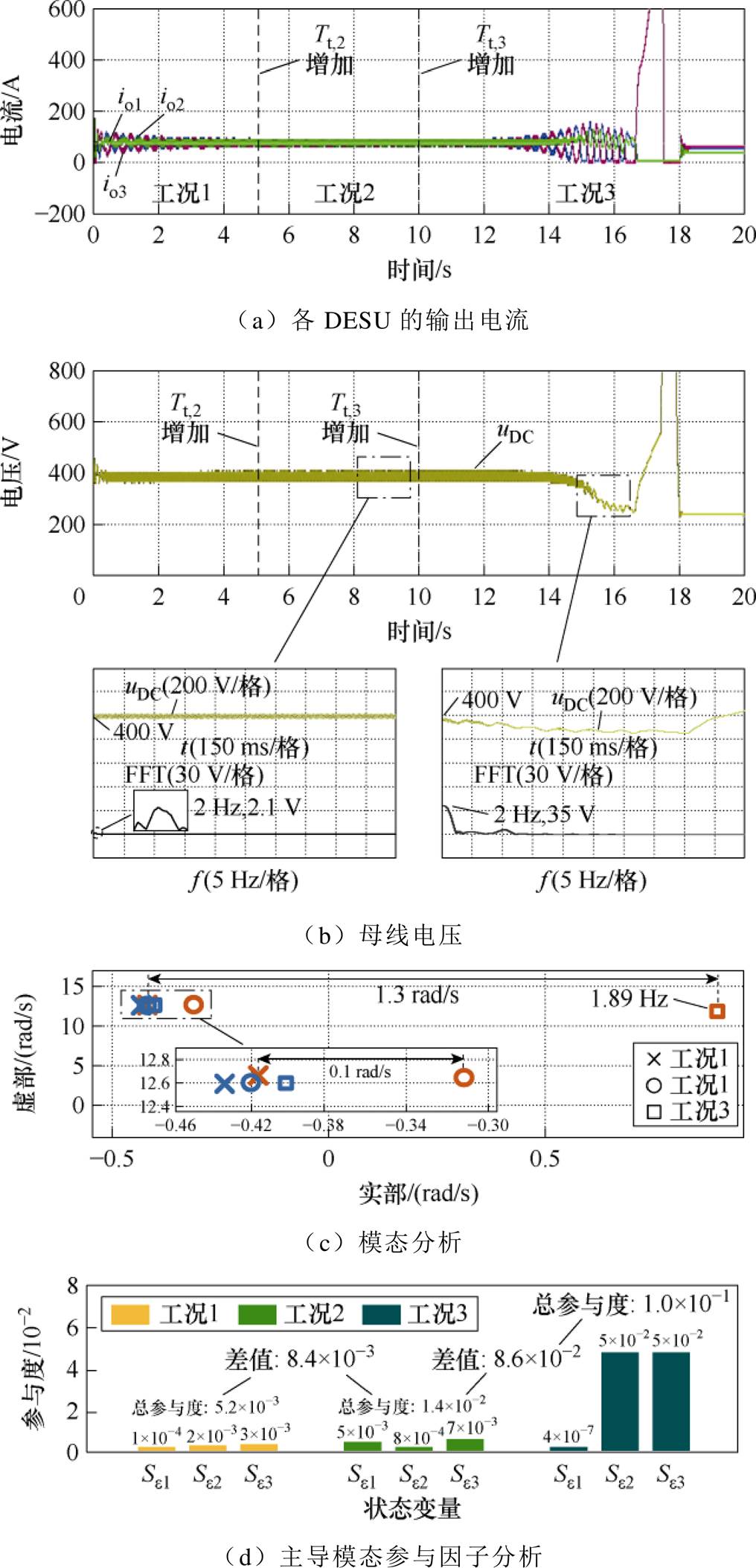
图14 实验1的波形与模态分析
Fig.14 Waveforms and modal analysis of experiment 1
实验结果与第2节中的理论分析一致,证明系统各DESU之间通信延时的增加不利于系统稳定,尤其是在多台DESUs的通信延时同时增加的情况下,会使系统对通信延时的敏感程度提高至少1个数量级,加剧多台DESUs之间通信延时的耦合,系统稳定裕度显著减低。
为验证DESU内部的计算延时Tj对系统稳定性的影响,在保持较小的通信延时Tt=1 ms且不变的前提下,工况设置见表4。
表4 实验2的工况
Tab.4 Conditions of experiment2 (单位: ms)
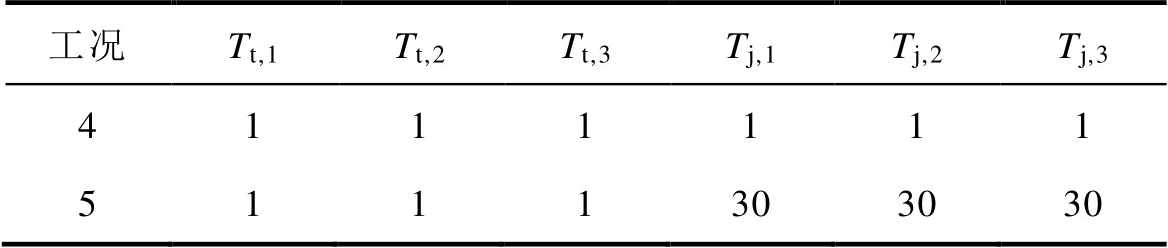
工况Tt,1Tt,2Tt,3Tj,1Tj,2Tj,3 4111111 5111303030
在t=5 s时,工况5增加系统的计算延时Tj,如图15a和图15b所示,在工况切换前后,系统均可快速实现电流均分和电压控制,且母线电压无明显谐波产生,原因是在通信延时Tt<5 ms时,如第2节所述,计算延时Tj的变化几乎不会影响两个主导模态的相关因子参与因子,如图15d所示,Tj增加后Tj相关因子参与因子仅提升了2.1×10-5,故此时两个主导模态仅向右移动了2.0×10-4 rad/s的距离,如图15c所示,对系统稳定性的影响几乎可以忽略不计,因此系统可以保持稳定。
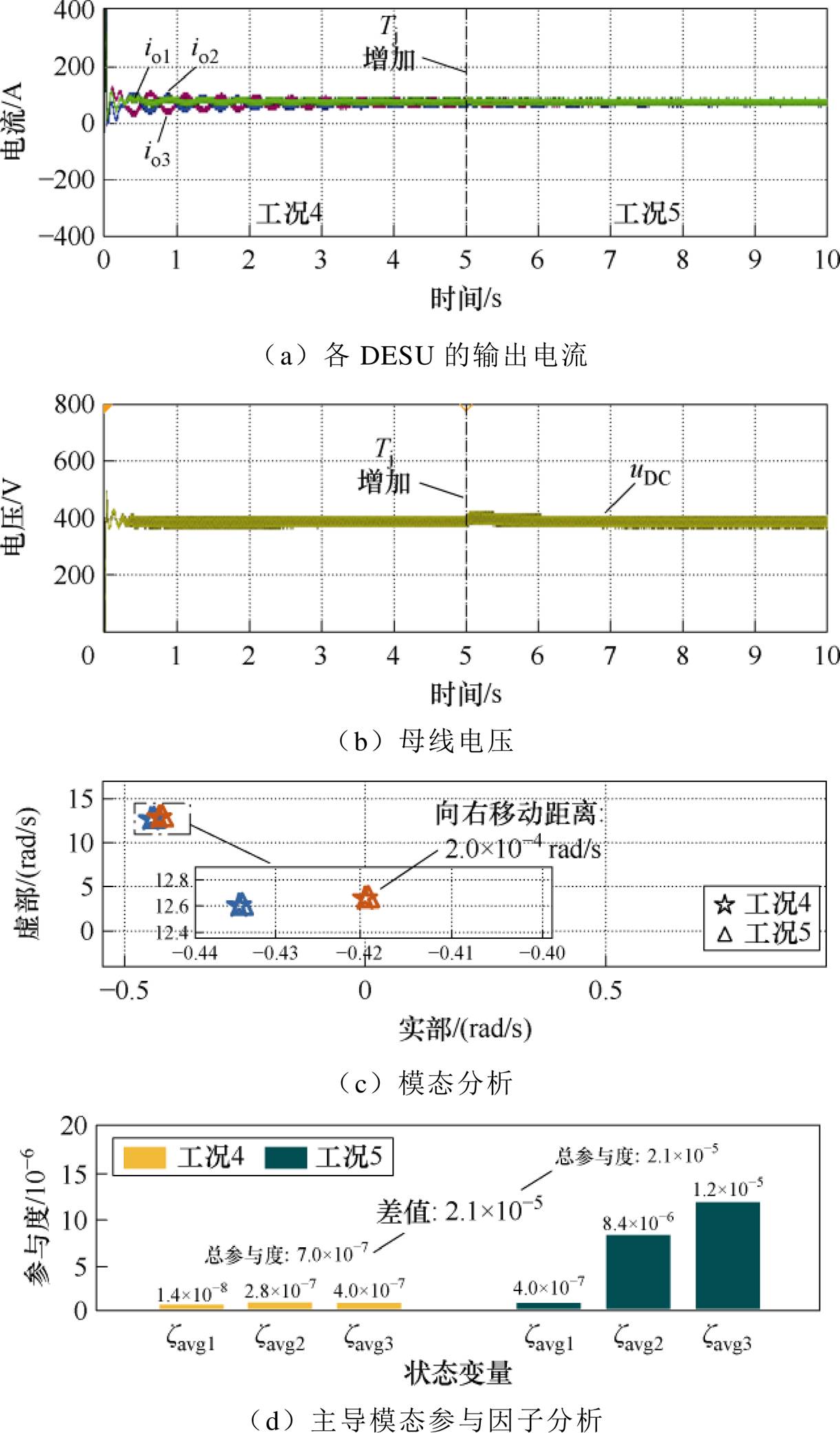
图15 实验2的波形与模态分析
Fig.15 Waveforms and modal analysis of experiment 2
实验结果与第2节中的理论分析一致,验证了在通信延时Tt<5 ms的情况下,计算延时Tj的变化基本不会影响系统稳定性。
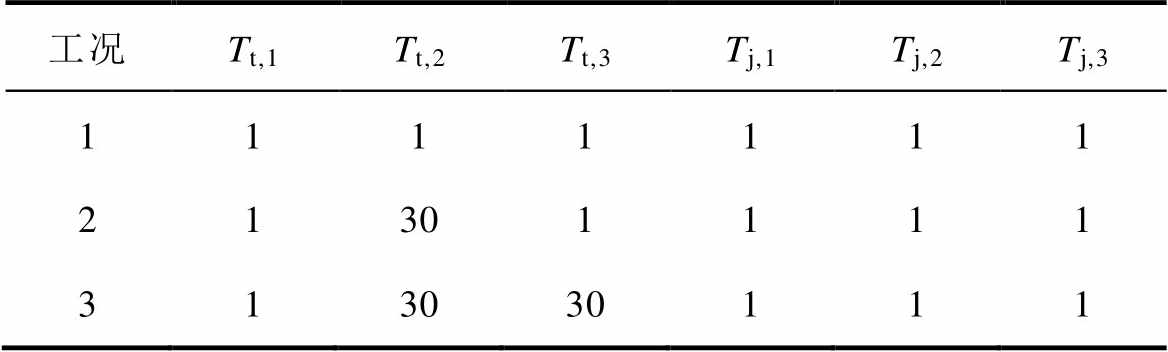
为了验证通信延时Tt与计算延时Tj的相互耦合作用对系统稳定性影响,将通信延时Tt固定为较大的7.2 ms,工况设置见表5。
表5 实验3的工况
Tab.5 Conditions of experiment 3 (单位: ms)
工况Tt,1Tt,2Tt,3Tj,1Tj,2Tj,3 67.27.27.2111 77.27.27.2303030 8 (引入方法)7.27.27.2303030
在t=5 s时,工况6切换为工况7,如图16a所示,在工况切换之前,系统母线电压被控制在参考值,系统稳定;工况7增加系统的计算延时Tj,使主导模态向右移动了0.013 rad/s的距离,如图16b所示,约为实验2中Tt<5 ms时的60倍。这最终导致母线电压出现振荡跌落,在2 Hz附近的振幅为25 V,与图16c中主导模态的理论振荡频率2.01 Hz基本一致。系统出现振荡的原因是通信延时Tt和计算延时Tj之间存在的耦合作用,如第2节所述,当Tt>5 ms时,会通过耦合放大主导模态中Tj相关因子的参与因子,如图16d所示,此时Tj相关因子参与因子增加了1.1×10-3(较实验2提高了约2个数量级),使系统对Tj的变化敏感。
实验结果与第2节中的理论分析一致,结合实验2,验证了系统通信延时Tt与计算延时Tj之间存在的耦合作用对稳定性的影响,即通信延时Tt>5 ms时,会增强DESU内部计算与通信延时之间的耦合程度,导致主导模态在相同幅度的Tj变化时向右移动更远的距离,显著降低系统的稳定裕度。
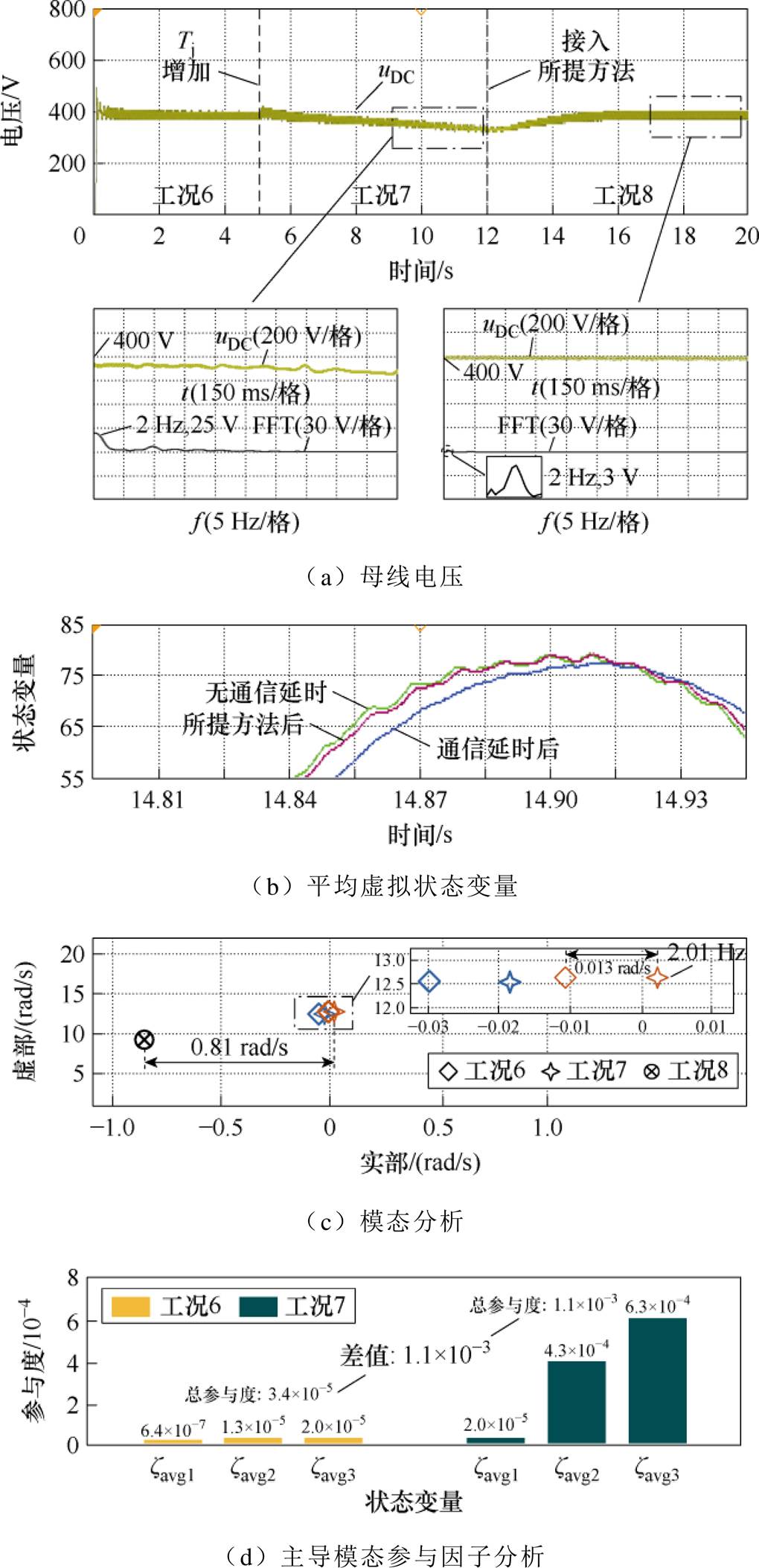
图16 实验3的波形与模态分析
Fig.16 Waveforms and modal analysis of experiment 3
为验证在典型小扰动场景下所提延时耦合机理的正确性,图17给出了系统在负荷突增和储能出力波动时的实验分析。具体而言,图17a展示了系统负荷功率PL从52 kW突增至57 kW时,延时变化对稳定性的影响;图17b则通过将各储能模块的电流分配系数ki从1.5 1.51.5调整为221,模拟了在储能出力波动场景下[14],延时变化对稳定性的影响。实验4~实验9均沿用前述实验1~实验3的工况设置,见表3~表5。
1.51.5调整为221,模拟了在储能出力波动场景下[14],延时变化对稳定性的影响。实验4~实验9均沿用前述实验1~实验3的工况设置,见表3~表5。
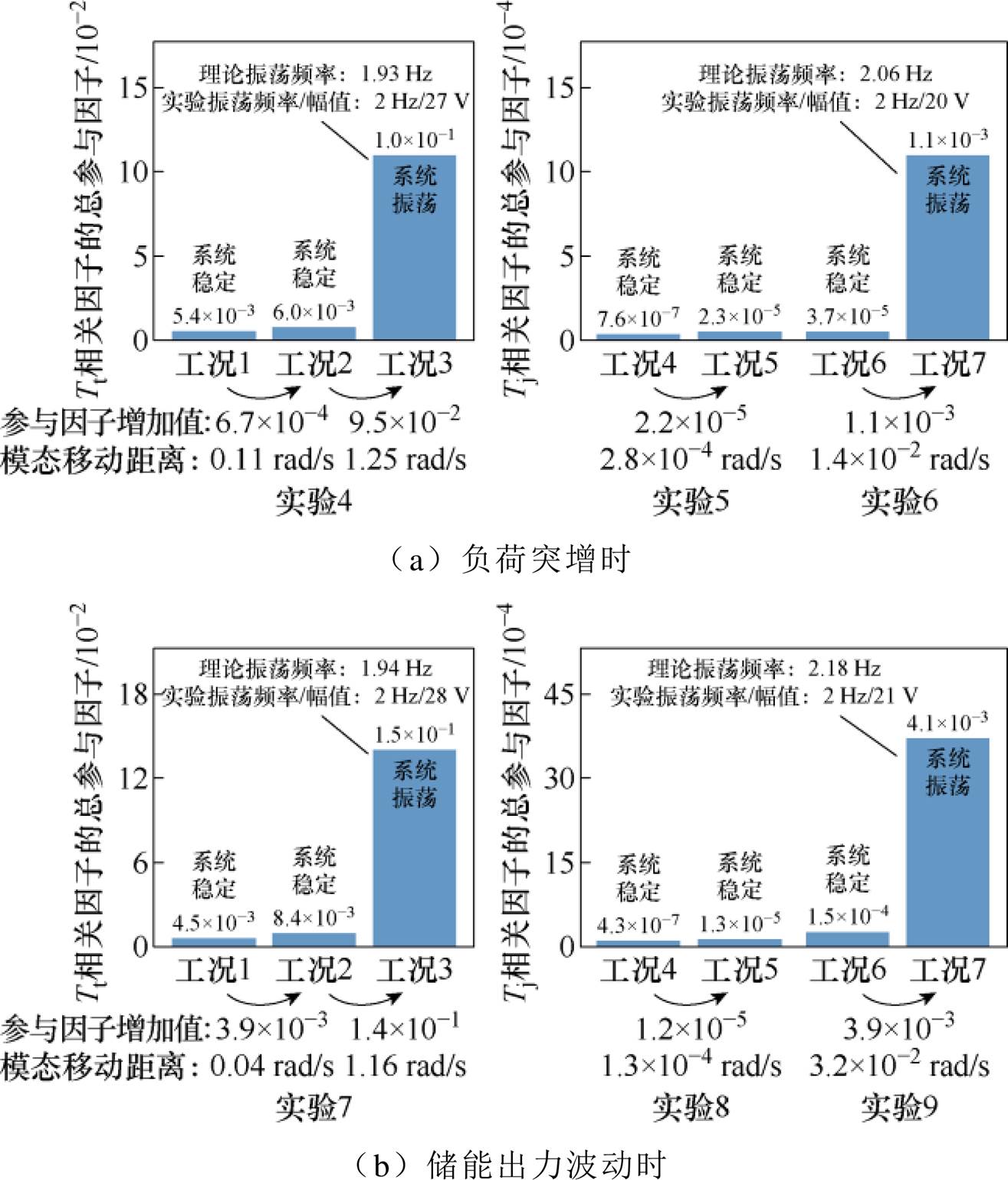
图17 典型小扰动场景下的实验分析
Fig.17 Experiments under typical small disturbance scenarios
在图17所示的负荷突增与储能出力波动场景下的实验4和实验7中,当工况2使1台DESU的通信延时增大时,相比工况1,两个场景下主导模态中Tt相关因子的参与因子仅分别增加6.7×10-4与3.9×10-3,导致主导模态的右移幅度较小,分别为0.11 rad/s和0.04 rad/s;而当工况3使两台DESUs的通信延时同时增大时,加剧了多台DESUs之间通信延时的耦合,此时两个场景下Tt相关因子的参与因子分别显著增加9.5×10-2与1.4×10-1(较工况2提高了约2个数量级),导致主导模态分别显著右移1.25 rad/s与1.16 rad/s,并移动至复平面右侧,系统失稳,母线电压在2 Hz附近的振幅分别为27 V与28 V。
为进一步分析计算与通信延时耦合对稳定性的影响,实验5和实验8的工况5在通信延时小于5 ms时增大计算延时,相比工况4,两个场景下主导模态仅分别向右移动了2.8×10-4 rad/s和1.3×10-4 rad/s的距离,原因是Tj相关因子的参与因子变化不大,仅分别增加了2.2×10-5与1.2×10-5,故系统保持稳定;实验6和实验9的工况7则在通信延时大于5 ms时增大相同的计算延时,此时主导模态较工况6分别显著右移了1.4×10-2 rad/s与3.2×10-2 rad/s,导致系统振荡,在2 Hz附近的振幅分别为20 V与21 V。原因是当通信延时大于5 ms时,会通过耦合放大主导模态中计算延时Tj相关因子的参与因子,此时Tj相关因子的参与因子分别显著增加了1.1×10-3和3.9× 10-3,使系统对计算延时的变化敏感。
实验结果与第2节的理论分析一致,验证了所得结论在不同场景下的正确性与普适性。
为了验证所提方法的有效性,在实验3中引入所提稳定性优化方法对通信延时进行选择性补偿,如图16的工况8所示。当t=12 s时,接入所提方法,如图16a所示,相较工况7,母线电压成功恢复至参考值,且快速傅里叶变换(Fast Fourier Transform, FFT)中的谐波含量较低,在2 Hz附近的振幅从25 V下降至3 V。原因是所提方法可将各DESU之间的交互信息zavgi补偿至接近于无通信延时的理想状态,如图16b所示,有效地降低了通信延时和与计算延时的耦合程度。此时,主导模态向左移动了0.81 rad/s并稳定在左半平面,如图16c所示,系统恢复稳定。
实验结果验证了所提方法可有效降低通信与计算延时之间耦合作用对稳定性的负面影响,提高了系统稳定性。
针对分布式储能系统,本文建立了考虑通信和计算延时的详细小信号状态空间模型,揭示了多延时耦合作用对系统稳定性的影响,并提出了相应的稳定性优化方法。主要研究结论如下:
1)较1台DESU而言,2台及以上DESUs的通信延时同时增加,会使系统对通信延时的敏感程度提高至少1个数量级,加剧多台DESUs之间通信延时的耦合,系统稳定裕度显著减低。
2)通信延时大于5 ms时,会增强DESU内部计算与通信延时之间的耦合程度,显著放大计算延时对系统稳定性的不利影响。
3)基于多延时耦合机理,提出了具有工程指导意义的延时参数设计规则:对于通信延时小于5 ms的DESUs,可以适当提高计算延时的设计上限,有效扩展了延时参数的稳定域。
4)提出了一种基于多延时解耦补偿的系统稳定性提升方法,通过在通信链路中引入超前补偿,有效降低通信与计算延时的耦合对稳定性的负面影响,提高系统稳定性。
未来研究将拓展至风光储联合发电系统,探究在复杂通信拓扑场景下,系统延时耦合对稳定性影响规律的普适性,这些研究有望为新型电力系统的稳定运行提供理论支撑。
附 录
式(15)系数矩阵Asys中各模块的具体表达式如下:
DESU模块的系数矩阵表达式为
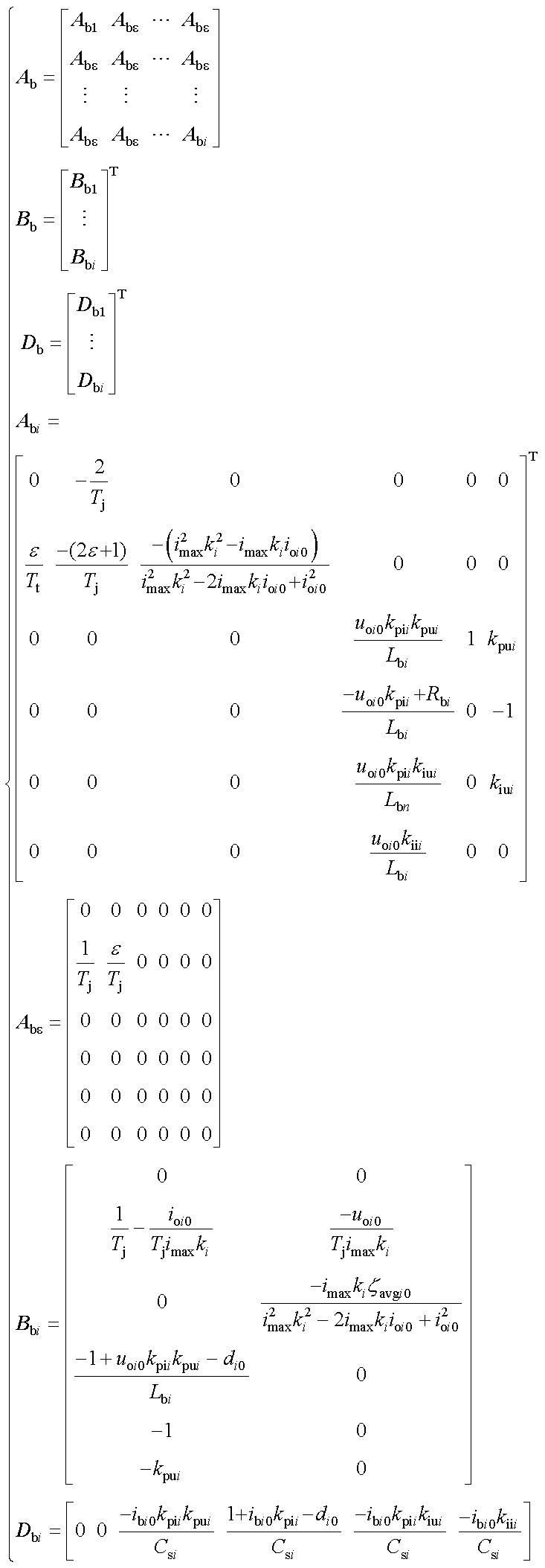 (A1)
(A1)
CPL模块的系数矩阵表达式为
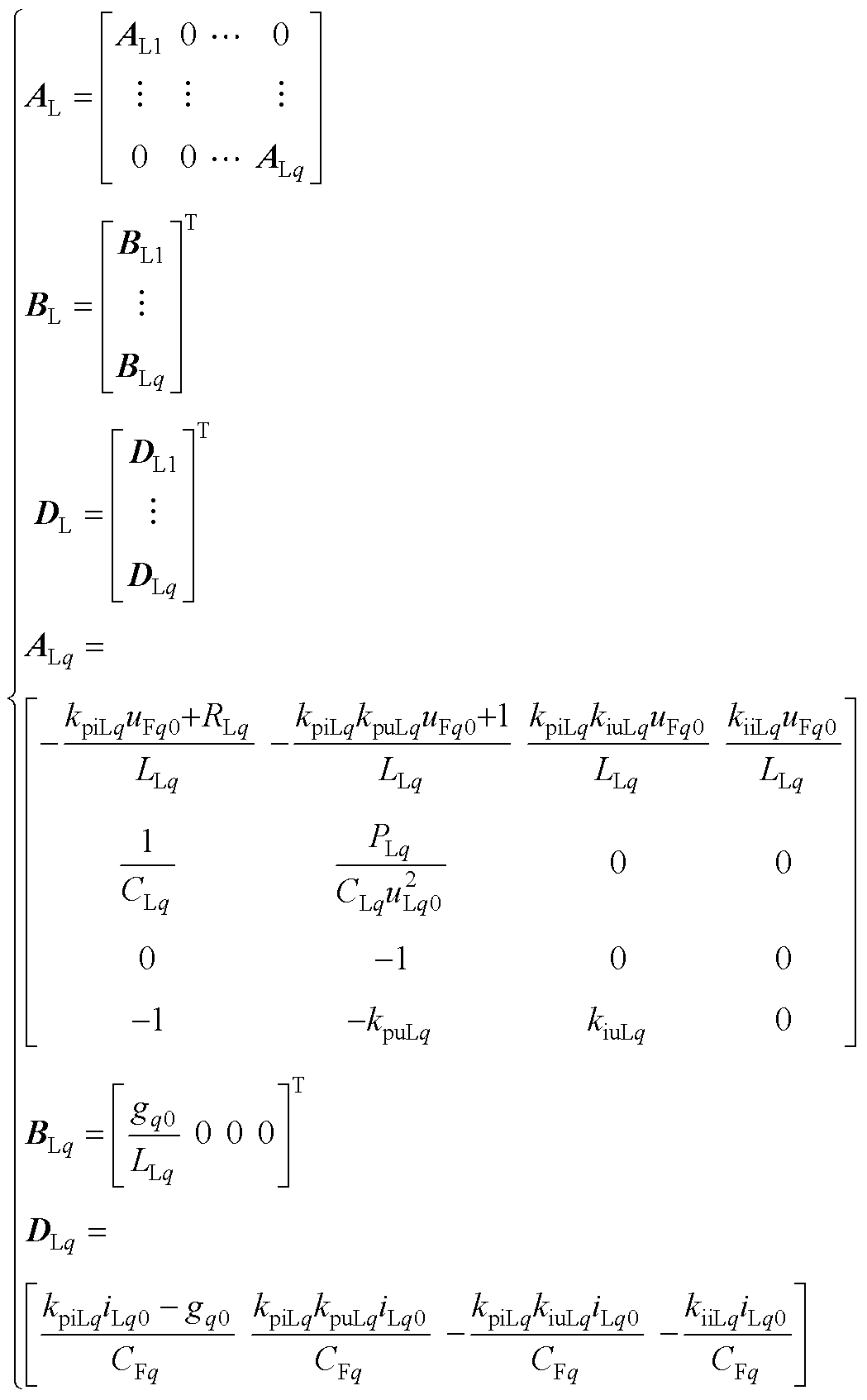 (A2)
(A2)
输电线路的系数矩阵表达式为
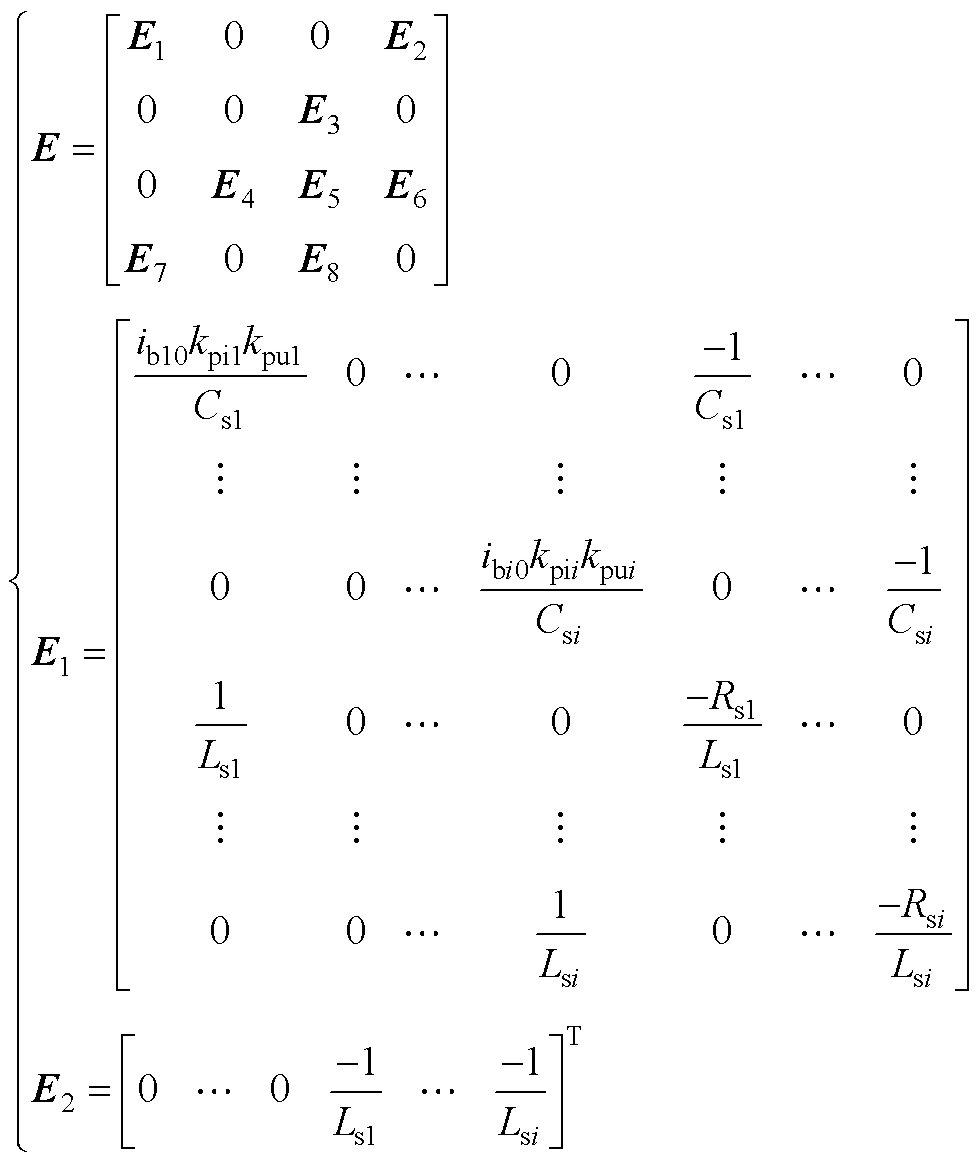 (A3)
(A3)
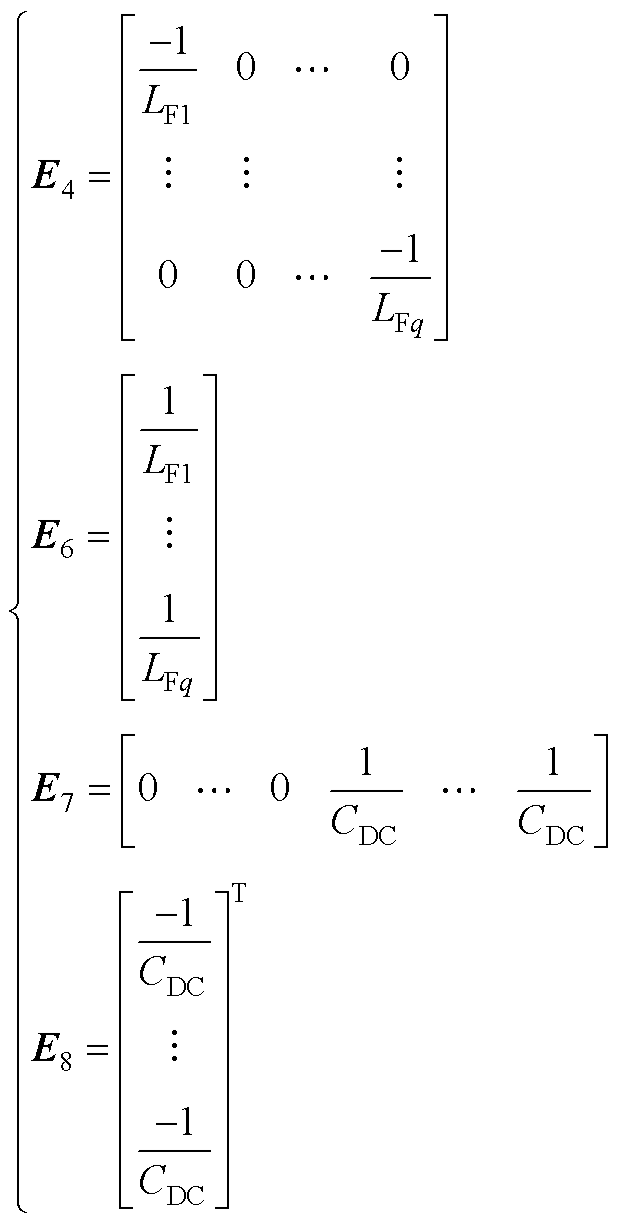 (A3续)
(A3续)
参考文献
[1] 王慧, 赵书强, 陈旭博, 等. 含类虚拟同步发电机和柔性负荷的直流微电网大信号稳定控制方法[J].电工技术学报, 2025, 40(3): 705-716.
Wang Hui, Zhao Shuqiang, Chen Xubo, et al. Large signal stability control method of DC microgrid with analogous virtual synchronous generator and flexible load[J]. Transactions of China Electrotechnical Society, 2025, 40(3): 705-716.
[2] 张泽华, 宋桂英, 张晓璐, 等. 考虑恒功率负载的直流微电网稳定性与鲁棒性控制策略[J]. 电工技术学报, 2023, 38(16): 4391-4405.
Zhang Zehua, Song Guiying, Zhang Xiaolu, et al. Stability and robustness control strategy of DC microgrid considering constant power load[J]. Transactions of China Electrotechnical Society, 2023, 38(16): 4391-4405.
[3] Tian Xinshou, Chi Yongning, Li Longxue, et al. Review of the configuration and transient stability of large-scale renewable energy generation through hybrid DC transmission[J]. CES Transactions on Electrical Machines and Systems, 2024, 8(2): 115- 126.
[4] 朱冠南, 陈敏, 王鹏程, 等. 低电网阻抗下构网型直挂式储能系统稳定性提升控制[J]. 电工技术学报, 2025, 40(9): 2697-2711.
Zhu Guannan, Chen Min, Wang Pengcheng, et al. Stability enhancement control strategy for grid- forming transformerless energy storage system under low grid impedance conditions[J]. Transactions of China Electrotechnical Society, 2025, 40(9): 2697- 2711.
[5] 颜湘武, 卢俊达, 吴鸣, 等.考虑配电台区经济性及承载力的旋转潮流控制器与分布式储能协调规划[J]. 电工技术学报, 2025, 40(5): 1503-1520.
Yan Xiangwu, Lu Junda, Wu Ming, et al. Coordinated planning of rotary power flow controller and distributed energy storage system considering the economic and carrying capacity of distribution station area[J]. Transactions of China Electrotechnical Society, 2025, 40(5): 1503-1520.
[6] Li Pengfei, Guo Li, Li Xialin, et al. Reduced-order modeling and comparative dynamic analysis of DC voltage control in DC microgrids under different droop methods[J]. IEEE Transactions on Energy Conversion, 2021, 36(4): 3317-3333.
[7] 朱珊珊, 汪飞, 郭慧, 等. 直流微电网下垂控制技术研究综述[J].中国电机工程学报, 2018, 38(1): 72-84, 344.
Zhu Shanshan, Wang Fei, Guo Hui, et al. Overview of droop control in DC microgrid[J]. Proceedings of the CSEE, 2018, 38(1): 72-84, 344.
[8] Silva W W A G, Oliveira T R, Donoso-Garcia P F. An improved voltage-shifting strategy to attain concomitant accurate power sharing and voltage restoration in droop-controlled DC microgrids[J]. IEEE Transa- ctions on Power Electronics, 2021, 36(2): 2396- 2406.
[9] Dong Zheng, Qin Jiawang, Hao Tianqu, et al. Distributed cooperative control of DC microgrid cluster with multiple voltage levels[J]. International Journal of Electrical Power & Energy Systems, 2024, 159: 109996.
[10] Yang Ling, Luo Dongtao, Liu Yuanxi, et al. A novel energy control strategy for distributed energy storage system based on virtual current[J]. International Journal of Electrical Power & Energy Systems, 2024, 158: 109979.
[11] 余洋, 李梦璐, 王卜潇, 等. 基于竞争合作机制的电池储能系统分布式功率分配策略[J]. 电工技术学报, 2025, 40(7): 2335-2352.
Yu Yang, Li Menglu, Wang Boxiao, et al. A distributed power allocation strategy for battery energy storage systems based on competitive- cooperative mechanism[J]. Transactions of China Electrotechnical Society, 2025, 40(7): 2335-2352.
[12] Li Lang, Sun Yao, Hou Xiaochao, et al. A minimal- communication control scheme of series-parallel microgrids for power sharing and frequency syn- chronization[J]. International Journal of Electrical Power & Energy Systems, 2024, 162: 110218.
[13] Zuo Kunyu, Wu Lei. Hybrid local-global power- sharing scheme for droop-free controlled microgrids[J]. Journal of Modern Power Systems and Clean Energy, 2024, 12(5): 1520-1534.
[14] 米阳, 张浩杰, 钱翌明, 等. 基于扩散算法的无下垂分布式储能控制[J].上海交通大学学报, 2024, 58(6): 836-845.
Mi Yang, Zhang Haojie, Qian Yiming, et al. Droop- free distributed energy storage control based on diffusion algorithm[J]. Journal of Shanghai Jiao Tong University, 2024, 58(6): 836-845.
[15] Dissanayake A M, Ekneligoda N C. Droop-free optimal feedback control of distributed generators in islanded DC microgrids[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(2): 1624-1637.
[16] 贺悝, 谭庄熙, 李欣然, 等. 考虑荷电状态一致性的分布式储能电站一次调频控制策略[J]. 高电压技术, 2024, 50(2): 870-880.
He Li, Tan Zhuangxi, Li Xinran, et al. Control strategy of primary frequency regulation for distributed energy storage stations considering SOC consensus[J]. High Voltage Engineering, 2024, 50(2): 870-880.
[17] Zuo Kunyu, Wu Lei. Eigenvalue-based stability analysis for droop-free controlled islanded microgrid with symmetric/asymmetric communication network[J]. IEEE Transactions on Smart Grid, 2022, 13(4): 2511-2522.
[18] 巫宇锋, 刘东, 廖望, 等. 考虑通信工况的主动配电网多层级协作电压控制方法[J]. 电力系统自动化, 2024, 48(14): 91-99.
Wu Yufeng, Liu Dong, Liao Wang, et al. Hierarchically coordinated voltage control method for active distribution networks considering commu- nication conditions[J]. Automation of Electric Power Systems, 2024, 48(14): 91-99.
[19] 孙伟, 方昭, 杨建平, 等. 考虑随机时变延时的孤岛微电网分布式二次控制[J]. 中国电机工程学报, 2022, 42(3): 864-876.
Sun Wei, Fang Zhao, Yang Jianping, et al. Distributed secondary control of islanded microgrid with stochastic time-varying delay[J]. Proceedings of the CSEE, 2022, 42(3): 864-876.
[20] Zhao Zhuoli, Xie Jindian, Gong Shaoqing, et al. Modeling, oscillation analysis and distributed stabili- zation control of autonomous PV-based microgrids[J]. CSEE Journal of Power and Energy Systems, 2023, 9(3): 921-936.
[21] Samy Jeya Veronica A J, Senthil Kumar N, Gonzalez-Longatt F. Robust PI controller design for frequency stabilisation in a hybrid microgrid system considering parameter uncertainties and commu- nication time delay[J]. IET Generation, Transmission & Distribution, 2019, 13(14): 3048-3056.
[22] 米阳, 王晓敏, 钱翌明, 等. 考虑通信时延的直流微电网分布式储能单元协调控制[J]. 电力系统保护与控制, 2022, 50(24): 91-100.
Mi Yang, Wang Xiaomin, Qian Yuming, et al. Coordinated control method of distributed energy storage units in a DC microgrid considering com- munication delay[J]. Power System Protection and Control, 2022, 50(24): 91-100.
[23] Zhang Qinjin, Zeng Yuji, Hu Yuanting, et al. Droop-free distributed cooperative control framework for multisource parallel in seaport DC microgrid[J]. IEEE Transactions on Smart Grid, 2022, 13(6): 4231- 4244.
[24] Zeng Yuji, Zhang Qinjin, Liu Yancheng, et al. Distributed unified controller design for parallel battery storage system in DC shipboard microgrid[J]. IEEE Transactions on Power Systems, 2024, 39(1): 546-563.
[25] 高扬, 艾芊, 王靖. 多智能体系统的交直流混合微网群一致性协同控制[J]. 高电压技术, 2018, 44(7): 2372-2377.
Gao Yang, Ai Qian, Wang Jing. Consensus cooperative control of AC/DC hybrid microgrids based on multi-agent system[J]. High Voltage Engineering, 2018, 44(7): 2372-2377.
[26] Yang Tao, He Yigang, Liu Guoping. Distributed voltage restoration of AC microgrids under com- munication delays: a predictive control perspective[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2022, 69(6): 2614-2624.
[27] Zeng Yuji, Zhang Qinjin, Liu Yancheng, et al. An improved distributed secondary control strategy for battery storage system in DC shipboard microgrid[J]. IEEE Transactions on Industry Applications, 2022, 58(3): 4062-4075.
[28] 张勤进, 胡王宝, 刘彦呈, 等. 一种直流微电网多光伏变换器新型功率分配策略[J]. 电力系统保护与控制, 2022, 50(9): 101-112.
Zhang Qinjin, Hu Wangbao, Liu Yancheng, et al. A novel power sharing strategy for multi photovoltaic converters in a DC microgrid[J]. Power System Protection and Control, 2022, 50(9): 101-112.
[29] Zhou Bin, Lin Zongli, Duan Guangren. Stabilization of a class of linear systems with input delay and the zero distribution of their characteristic equations[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2011, 58(2): 388-401.
[30] 刘磊, 屈艾文. 基于一致性算法的直流微电网虚拟电压轴协调控制[J/OL]. 电力系统及其自动化学报, 1-10[2025-09-05]. DOI: 10.19635/j.cnki.csu-epsa. 001629.
Liu Lei and Qu Aiwen. Virtual voltage axis coor- dinated control for DC microgrid based on consensus algorithm[J/OL]. Proceedings of the CSU-EPSA, 1-10[2025-09-05]. DOI: 10.19635/j.cnki.csu-epsa. 001629.
[31] 吕振宇, 吴在军, 窦晓波, 等. 自治直流微电网分布式经济下垂控制策略[J]. 中国电机工程学报, 2016, 36(4): 900-910.
Lü Zhenyu, Wu Zaijun, Dou Xiaobo, et al. A distributed droop control scheme for islanded DC microgrid considering operation costs[J]. Proceedings of the CSEE, 2016, 36(4): 900-910.
[32] 邓思成, 陈来军, 郑天文, 等. 考虑系统延时的微电网有功功率分布式控制策略[J]. 电网技术, 2019, 43(5): 1536-1542.
Deng Sicheng, Chen Laijun, Zheng Tianwen, et al. Active power distributed control of microgrids considering system time delays[J]. Power System Technology, 2019, 43(5): 1536-1542.
[33] Chen Gang, Zhao Zhongyuan. Delay effects on consensus-based distributed economic dispatch algorithm in microgrid[J]. IEEE Transactions on Power Systems, 2018, 33(1): 602-612.
[34] Yang Ling, Huang Zehang, Chen Jinghua, et al. Stability analysis and interaction-rule-based optimi- zation of multisource and multiload DC microgrid[J]. IEEE Transactions on Power Electronics, 2024, 39(1): 469-482.
[35] Mardani M M, Vafamand N, Khooban M H, et al. Design of quadratic D-stable fuzzy controller for DC microgrids with multiple CPLs[J]. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4805-4812.
[36] Philpott T, Agalgaonkar A P, Muttaqi K M. Investigation of oscillatory mode damping following the displacement of synchronous generators in power grids[J]. IEEE Transactions on Industry Applications, 2024, 60(4): 5388-5397.
[37] Wang Bowen, Verbič G. Stability analysis of low- voltage distribution feeders operated as islanded microgrids[J]. IEEE Transactions on Smart Grid, 2021, 12(6): 4681-4689.
[38] 杨苓, 黄泽杭, 陈璟华, 等. 基于纵横交叉算法的直流微电网趋优稳定性分析[J]. 高电压技术, 2023, 49(11): 4632-4641.
Yang Ling, Huang Zehang, Chen Jinghua, et al. Optimal stability analysis of DC microgrid based on crisscross optimization algorithm[J]. High Voltage Engineering, 2023, 49(11): 4632-4641.
[39] Gorbunov A, Peng J C, Bialek J W, et al. Identification of stability regions in inverter-based microgrids[J]. IEEE Transactions on Power Systems, 2022, 37(4): 2613-2623.
[40] Shyam A B, Anand S, Sahoo S R. Effect of communication delay on consensus-based secondary controllers in DC microgrid[J]. IEEE Transactions on Industrial Electronics, 2021, 68(4): 3202-3212.
Abstract A distributed energy storage system (DESS) is a key component of DC microgrids, effectively mitigating power fluctuations from renewable energy and load demand. However, in DESS based on droop-free control, distributed energy storage units (DESUs) transmit information over sparse communication networks, and the presence of communication and computation delays threatens system stability. Most existing studies employ transfer function models to analyze the stability of DESS with delays. However, such models can only characterize the input-output relationship of the system, failing to describe the complex coupling interactions among internal parameters accurately. Therefore, this paper investigates the influence of delay-parameter coupling on system stability and proposes a stability-optimization method based on multi-delay decoupling.
First, given the low-inertia characteristics and communication constraints of DESUs and the sparse inter-DESU communication topology, a detailed small-signal state-space model of DESS is established based on inter-DESU communication. Subsequently, by solving the system's eigenvalue distribution, the dominant modes most sensitive to the system response are identified. The factors influencing these modes are analyzed, revealing that the primary determinants of system stability are communication and calculation delays in the communication link. The variations in the participation of the dominant modes across different delay combinations are quantitatively explored, revealing the coupling among multiple delay parameters and their effects on system stability. Two critical findings are obtained. (1) Compared with a single DESU, the simultaneous increase in communication delay of two or more DESUs increases the system sensitivity to communication delay by at least one order of magnitude, intensifying the coupling of communication delay among multiple DESUs, and significantly reducing the system stability margin. (2) When the communication delay exceeds 5ms, it indirectly increases the contribution of computational delay to the dominant mode via coupling. It causes the dominant modes to move a greater distance for the same magnitude of variation in calculation delay, thereby amplifying the negative impact of calculation delay on stability. The correctness and universality of the obtained conclusion are verified in the case of an increase in the total number of DESUs. The degree of influence of communication and calculation delays on system stability primarily depends on the magnitude of the communication delay. Therefore, a delay-decoupling compensation method is proposed that applies advanced processing to communication channels and actively compensates for delay-induced communication errors. It effectively mitigates the adverse effects of the coupling between communication and computation delays on stability, stabilizes the dominant modes in the left half-plane, and improves overall system stability.
Finally, a hardware-in-the-loop experimental platform is established, and experiments verify the correctness and effectiveness of the theoretical analysis and the proposed method. Meanwhile, across scenarios of sudden load increases and fluctuations in energy storage output, the universality of the proposed conclusion is further verified.
keywords:Distributed energy storage system, droop-free control, consistency algorithm, multi-delay coupling, stability analysis
中图分类号:TM712
DOI: 10.19595/j.cnki.1000-6753.tces.250917
国家自然科学基金(52107185)、广东省基础与应用基础研究基金(2023A1515010061)、广州市基础与应用基础研究基金(2024A04J4673)和电能高效高质转化全国重点实验室开放基金(2024KF008)资助项目。
收稿日期 2025-05-30
改稿日期 2025-09-08
杨 苓 女,1992年生,博士,副教授,硕士生导师,研究方向为分布式储能系统的建模与稳定性分析。
E-mail: 1650148795@qq.com(通信作者)
李杰文 男,2001年生,硕士研究生,研究方向为分布式储能系统的建模与稳定性分析。
E-mail: 1368393655@qq.com
(编辑 陈 诚)