图1 构网型双馈风力发电机组整体结构
Fig.1 The overall structure of grid-forming doubly-fed wind power generation unit
摘要 针对构网型双馈风力发电机组的控制参数辨识问题,该文提出一种在扰动屏蔽基础上,采用弹性网络结合改进阿尔法进化算法的参数辨识策略。首先通过弹性网络确定与控制参数关联性强的观测量,采用轨迹灵敏度分析法确定构网型双馈风力发电机(VSG-DFIG)参数的可区分辨识度,并对比分析一次侧短路法与扰动屏蔽法的灵敏度数值,验证扰动屏蔽策略的可行性。最后在扰动屏蔽策略的基础上,采用改进阿尔法进化算法结合多目标加权优化模型进行参数辨识。仿真结果表明,相比于基于一次侧短路故障的辨识策略,该文方法在多种工况下显著降低了计算成本,并提高了参数辨识的准确性,为构网型双馈风力发电机组的建模与控制提供了更精确的参数支撑。
关键词:参数辨识 扰动屏蔽 多目标加权优化 改进阿尔法进化算法 轨迹灵敏度
近年来,风力发电领域经历了快速的发展,风电在整体电力供应中的比例不断上升。随着风电大规模接入电网,其对电力系统的稳定性也带来了严峻的挑战。双馈异步发电机(Doubly-Fed Induction Generator, DFIG)在风力发电系统中占据重要地位。但其却缺乏同步电机所特有的稳定特性。鉴于此,有研究者提出了虚拟同步发电机(Virtual Synchronous Generator, VSG)的概念,依托于VSG理念的提出,构网型双馈风力发电机(VSG-DFIG)应运而生,其能够显著增强风力发电系统的并网稳定性[1-2]。而VSG-DFIG的变流器在风力发电系统中起着核心作用,所以其控制参数对发电机的动态性能有着极大的影响,即精确的模型构建和参数设定至关重要,因此,VSG-DFIG控制参数辨识问题亟待深入研究。
当前,关于VSG-DFIG控制参数辨识领域的研究内容较少,大多数研究仍针对于DFIG的变流器控制参数辨识领域。文献[3-4]分别推导出DFIG转子侧与网侧控制器的传递函数,通过L-M算法辨识出DFIG的控制参数。文献[5-6]通过在机组出口设置三相短路故障,对DFIG控制器参数进行辨识。文献[7]通过分析机组各控制器参数与动态响应特性的主导关系,实现了对DFIG控制器参数的并行辨识。文献[8]针对转子侧控制器模型结构复杂的问题,通过在输入信号的参考值上施加伪随机信号,辨识转子侧控制器各参数。
选取正确的观测量对于VSG-DFIG控制参数辨识的准确度有重要影响。文献[9]直接选取风电机组出口处的有功功率和无功功率作为观测量,并未计及其他电气量关于控制参数的动态特性,观测量的选取对目标函数的设定会造成一定影响[10],因此这种策略会使最终辨识结果存在一定误差。文献[11]采用随机森林(Random Forest, RF)算法分析控制参数与待选观测量的关联程度,从而筛选出高关联度观测量。
关于辨识DFIG控制参数策略方面,传统策略通常在DFIG一次侧施加短路故障[12],然而VSG- DFIG的机侧有不同于DFIG的三环级联结构[13],使得在一次侧短路故障下其三个控制环节的控制器共同作用[14-15],灵敏度差异不大,由于在辨识参数前需对DFIG的控制参数取经验值,其经验值与真实值的差距将会在分步辨识的过程中令辨识误差大大增加[16]。现阶段,关于VSG-DFIG的参数辨识领域的研究较少,因此,寻找出一种针对VSG-DFIG控制器参数辨识的策略有助于提高VSG-DFIG的建模精度。
将智能优化算法引入到参数辨识问题的求解中,可以显著提升参数辨识精度,同时增强辨识过程的灵活性[17]。文献[18]采用鲸鱼优化算法对变压器结构参数进行辨识与优化。文献[19]采用了多岛遗传算法对感应加热装置进行参数辨识。文献[20]采用改进最小二乘算法进行参数辨识,相较于传统的最小二乘法算法具有一定优势。
在上述研究背景下,针对VSG-DFIG难以应用传统辨识策略的问题,本文提出一种基于前级控制器输入扰动屏蔽的辨识方法。首先利用弹性网络中关于特征选择的评分机制,为每一级控制器选择评价系数高的信号作为后续辨识过程中的观测量。在前级控制器输入扰动屏蔽辨识环境下,基于轨迹灵敏度采用皮尔逊相关系数分析单级控制器控制参数的可区分辨识性,并分别计算应用一次侧故障策略与扰动屏蔽策略下每一级控制器的控制参数灵敏度平均值。根据观测量选取结果针对每一级控制器制定多目标加权求和辨识目标函数,采用改进阿尔法进化算法对每一级控制器进行分步寻优辨识。最后将传统策略与本文策略下的辨识结果与原模型输出特性进行对比及误差分析,验证所提策略的有效性。需要强调的是,本文的辨识对象为VSG-DFIG系统的控制参数而非被控设备的参数。
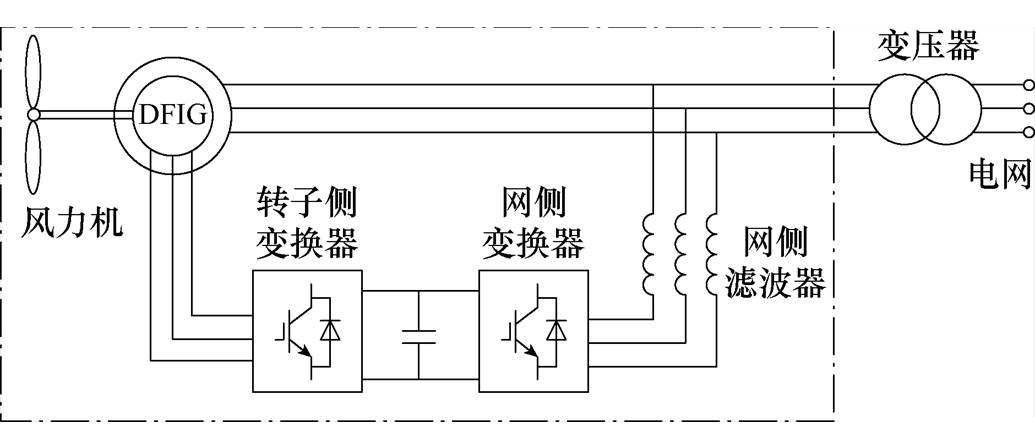
VSG-DFIG的整体结构如图1所示,其中变流器部分的机侧和网侧控制结构分别如图2和图3所示。Kp为PI控制器的比例系数,Ki为PI控制器的积分系数。
图1 构网型双馈风力发电机组整体结构
Fig.1 The overall structure of grid-forming doubly-fed wind power generation unit
图2中,转子侧控制器控制参数如下:D为有功-频率控制器阻尼系数,Tj为惯性时间常数,Kp1、Ki1为无功-电压控制器参数,Kp2、Ki2为电压内环控制器PI参数,Kp3、Ki3为电流内环控制器PI参数。ws、wvsg、w2分别为电网、虚拟同步机与转子侧角频率,qs为虚拟同步机相位,Ps,ref、Ps、Qs分别为定子侧实际与参考有功、无功功率,Us与Us,ref分别为定子电压与定子参考电压,usd、usq、urd、urq为定转子dq轴电压,isd、isq、ird、irq为定转子dq轴电流,Lr为转子电感,Lm为定转子之间的互感。
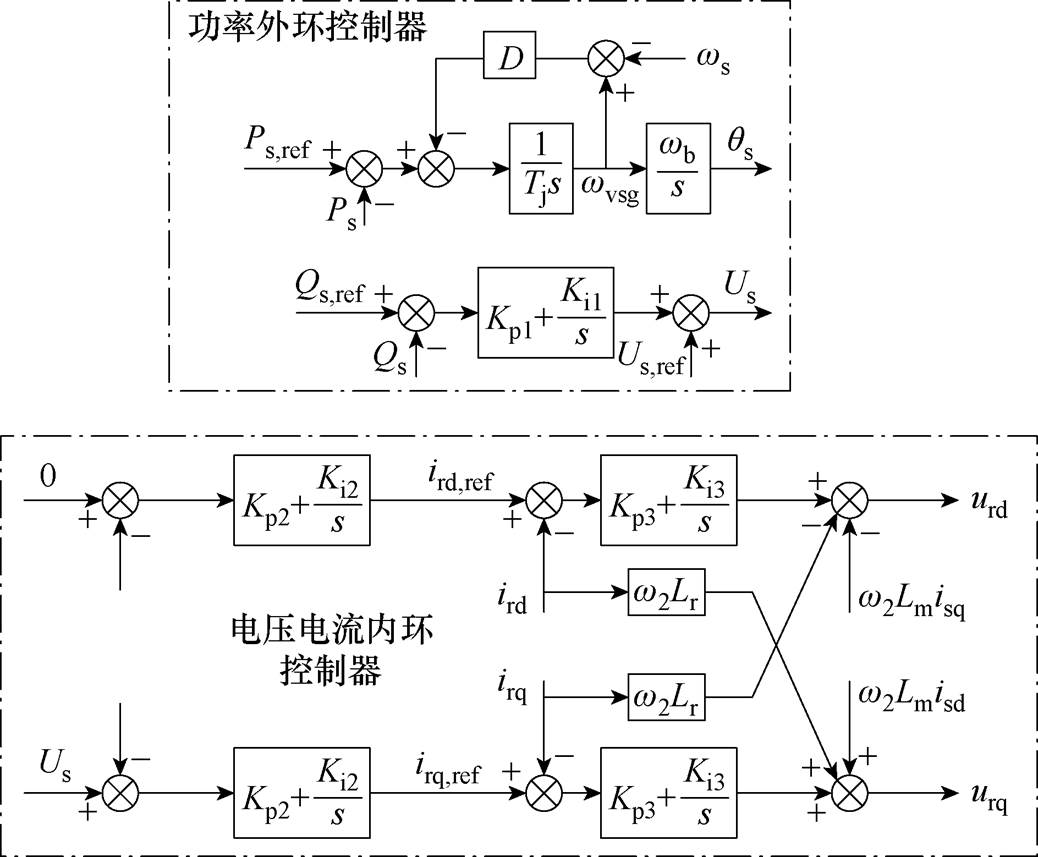
图2 构网型双馈风力发电机机侧控制系统
Fig.2 The machine-side control system of grid-forming doubly-fed wind power generator
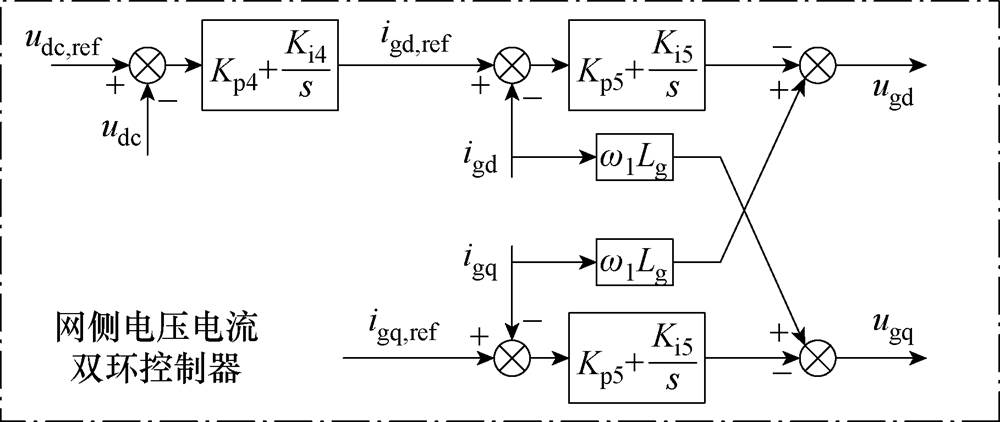
图3 构网型双馈风力发电机网侧控制结构
Fig.3 The grid-side control structure of grid-forming doubly-fed wind power generator
根据图2控制系统,VSG-DFIG机侧控制器分三级组成,前级功率外环控制方程为
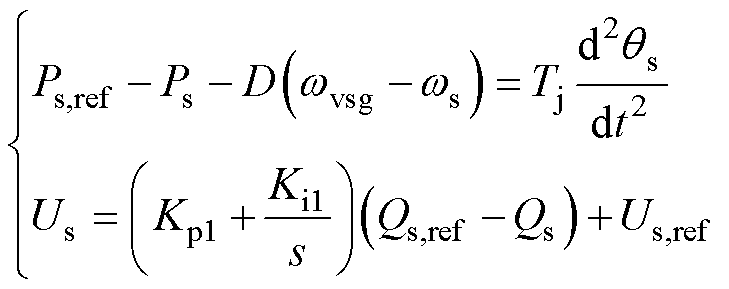 (1)
(1)
中间定子电压内环控制方程为
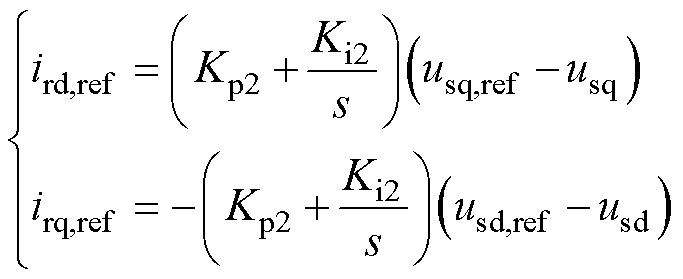 (2)
(2)
后级转子电流内环控制方程为
 (3)
(3)
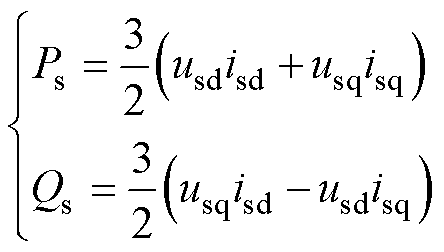
VSG-DFIG定子侧输出有功功率Ps和无功功率Qs分别为
 (4)
(4)
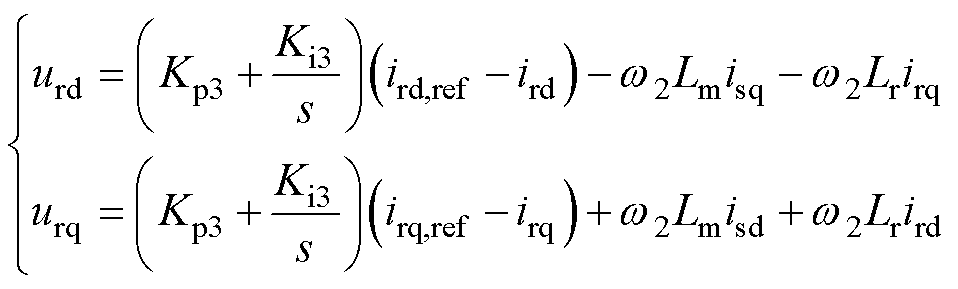
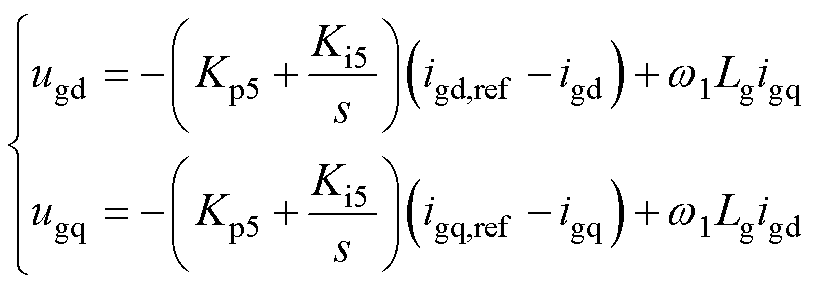
图3中,网侧控制器主要参数如下:Kp4、Ki4为直流电压外环控制器PI参数,Kp5、Ki5为电流内环控制器PI参数,udc,ref、udc分别为直流电压参考值与实际值,igd、igq分别为网侧d、q轴电流,w1为网侧角频率,Lg为网侧滤波电感,ugd,ref、ugq,ref、ugd、ugq分别为网侧d、q轴参考电压与实际电压。
根据图3中的网侧控制系统,VSG-DFIG网侧控制器分两级组成,其后级电流内环控制方程为
 (5)
(5)
前级电压外环控制方程为
 (6)
(6)
VSG-DFIG网侧输出有功功率Pg和无功功率Qg分别为
 (7)
(7)
基于上述控制方程,机侧输出功率Ps与Qs的动态特性受定子电压us、定子电流is影响,网侧输出功率Pg与Qg的动态特性受ugd与ig影响,且均与前级与后级控制环节的控制参数有关联,因此将上述涉及到的电气量作为后续观测量选择中的备选。
VSG-DFIG机侧控制部分通过电流内环、电压内环、功率外环三环级联控制,网侧控制部分通过电流内环与电压外环两级控制,采用常规方法制造单一扰动无法同时精确辨识出所有控制器参数,因此制造多种输入扰动且辨识在该扰动下的高灵敏度参数即可提高整体参数辨识结果的精度[21]。
选择合理的观测量有助于提高参数辨识的整体精度。VSG-DFIG控制系统具有高度的非线性特性,机器学习中的评分机制适合于选择非线性模型中的高关联特征选择。因此,本文使用结合Lasso和Ridge两种正则化技术的弹性网络(Elastic Net, EN)来选择关联性强的待观测量特征。后续采用模型训练完成后得到的系数向量 来进行特征选择。
来进行特征选择。
弹性网络的损失函数可以表示为
 (8)
(8)
式中, 为方均误差损失;
为方均误差损失; 和
和 分别为控制正则化强度与比例的参数,取值范围在0~1之间;
分别为控制正则化强度与比例的参数,取值范围在0~1之间; 为L1正则化项;
为L1正则化项; 为L2正则化项。
为L2正则化项。
弹性网络通过在损失函数中同时引入L1与L2,从而实现以下两个目标:L1正则化促使部分回归系数变为零,实现特征选择;L2正则化防止回归系数过大,增强模型的稳定性。本文在使用弹性网络进行观测量选择时,使用的训练集数目远大于待选择的观测量数目即特征数目,且VSG-DFIG中存在级联的控制环节,基于数据特性的经验法则,当样本充足且存在相关特征组时,选择对弹性网络进行混合正则化,取式(8)中的l=0.05,r=0.5。训练集的获取则来源于VSG-DFIG系统在各控制环节参数取微小变化后的运行数据[22]。
利用弹性网络对观测量和VSG-DFIG控制参数进行关联性分析,将VSG-DFIG并网点输出有功功率P及无功功率Q,网侧变流器直流电压udc,网侧变流器输出d、q轴电流igd、igq,定子端输出d、q轴电流isd、isq 7个观测量与控制参数的关联度作为弹性网络的评价对象,综合评价系数如图4所示。
图4中的评价系数结果为弹性网络对控制参数与观测量关联性评价的关联度 绝对值,绝对值越大表示两者间的关联性越强。根据图4中结果,为所有控制环节选择高评价系数的观测量,选择评价系数排名前二的观测量作为后续参数辨识过程中的辨识量,将评价系数首位的观测量定为
绝对值,绝对值越大表示两者间的关联性越强。根据图4中结果,为所有控制环节选择高评价系数的观测量,选择评价系数排名前二的观测量作为后续参数辨识过程中的辨识量,将评价系数首位的观测量定为 ,排名第二位的定为
,排名第二位的定为 。观测量选取结果见表1。
。观测量选取结果见表1。
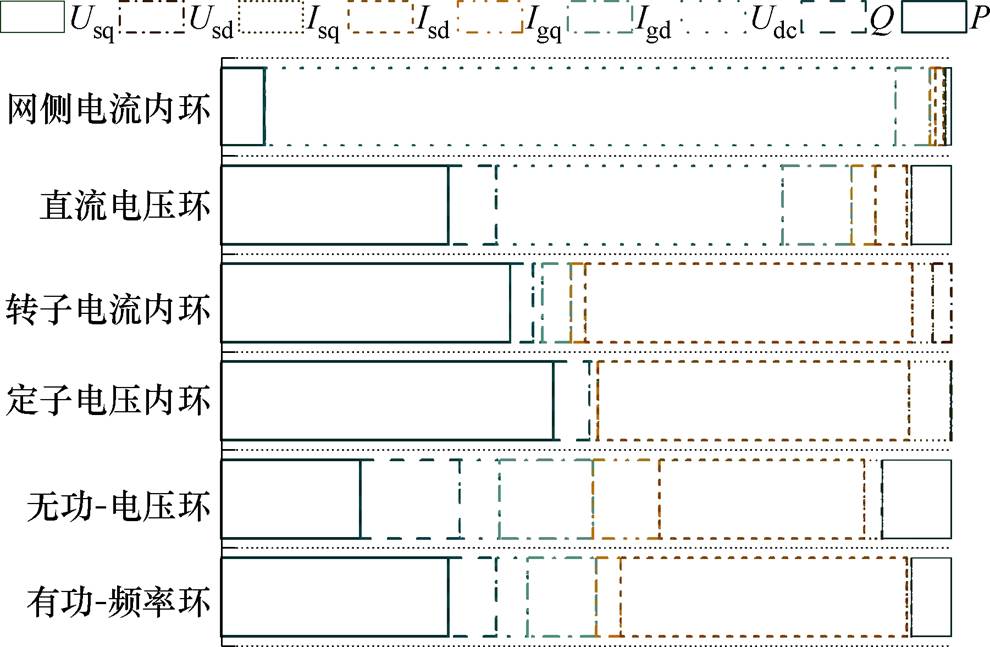
图4 控制环基于观测量的评价系数对比
Fig.4 Control loop evaluation coefficients comparison chart based on observation
表1 控制环观测量选择结果
Tab.1 Control loop observation measurement selection results
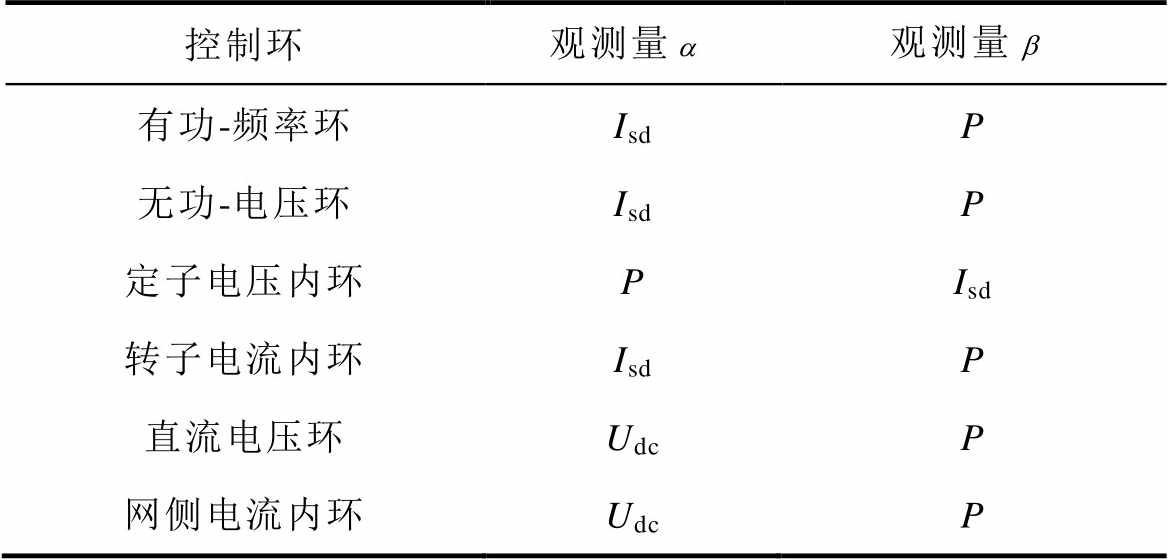
控制环观测量观测量 有功-频率环IsdP 无功-电压环IsdP 定子电压内环PIsd 转子电流内环IsdP 直流电压环UdcP 网侧电流内环UdcP
轨迹灵敏度参数的可辨识性与辨识的难易程度是常用的评价指标[23],即在系统施加干扰后,计算辨识控制参数对输出特性的敏感度,本文选择分析观测量在不同种扰动下关于控制参数的轨迹灵敏度来验证整体辨识策略的正确性。同一观测量下,灵敏度值越小表明其参数改变对系统的外特性影响就越小,越难以辨识。
定义某控制器参数 关于某一动态响应y的轨迹灵敏度
关于某一动态响应y的轨迹灵敏度 为
为
 (9)
(9)
式中,下标j表示第j个参数; 为参数个数;
为参数个数; 为的变化量;
为的变化量; 为由重点参数所组成的列向量;
为由重点参数所组成的列向量; 和
和 分别为原受扰轨迹和参数发生偏差后的受扰轨迹。
分别为原受扰轨迹和参数发生偏差后的受扰轨迹。
同时,假设第 个参数与第
个参数与第 个参数
个参数 线性相关,可表示为
线性相关,可表示为
 (10)
(10)
式中, 为常数。
为常数。
则两参数相对于 的轨迹灵敏度满足
的轨迹灵敏度满足
 (11)
(11)
从式(11)可以看出:如果参数与线性相关,则它们的轨迹灵敏度将同相或者反相,需要注
意的是,当多个控制参数的轨迹灵敏度同相或反相时,这些参数线性相关,无法区分辨识。
根据以上推导表明,关联控制参数的轨迹灵敏度线性相关,但仅以两控制参数的轨迹灵敏度曲线为分析依据难以量化其参数相关程度,所以采用皮尔逊相关系数分析法判断不同控制参数的轨迹灵敏度曲线的相关程度。相关系数的取值范围从-1到1,其绝对值大于0.8时则判定为强相关。
 (12)
(12)
式中, 与
与 均为待判断的控制参数轨迹灵敏度值;
均为待判断的控制参数轨迹灵敏度值; 与
与 分别为控制参数轨迹灵敏度平均值;r为计算得到的控制参数间的相关系数。
分别为控制参数轨迹灵敏度平均值;r为计算得到的控制参数间的相关系数。
为更直观地反映级联条件下机侧控制参数与网侧控制参数的相关性,施加信号扰动且以控制环选定的观测量和为基准,根据式(5)计算皮尔逊相关系数,绘制雷达图如图5所示。
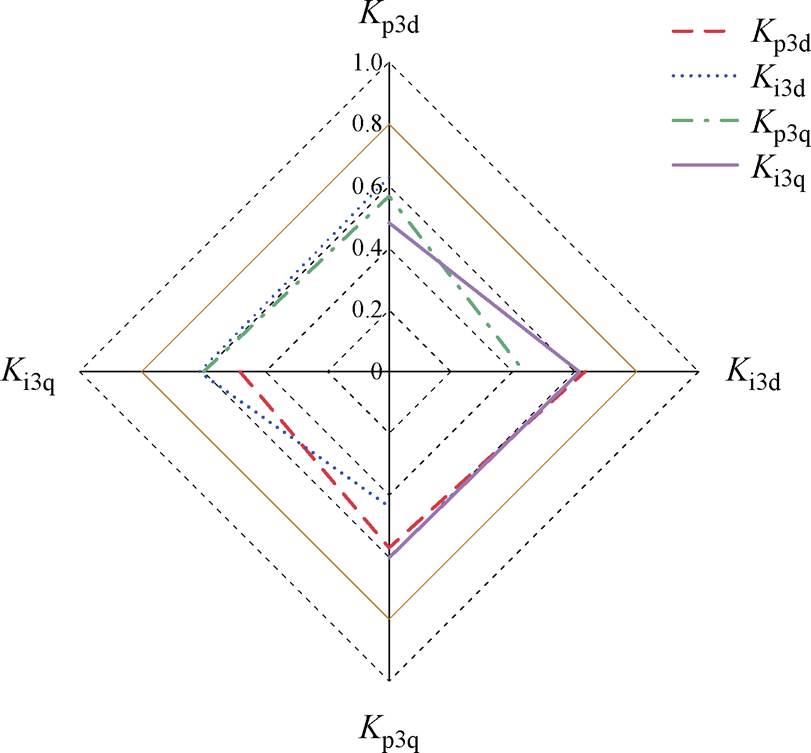
图5 转子电流内环参数相关系数雷达图
Fig.5 The radar chart of correlation coefficients for the rotor current inner loop parameters
受限于篇幅,正文中只列举转子电流内环的相关系数,其余控制环的相关系数见附图1。
皮尔逊相关系数r衡量的是两个变量间的线性统计关联度,其数学本质可从方向性与强度两个方面来解释:①方向性,当相关系数r>0时,变量之间表现为同向变化,反之,则为反向变化;②强度,|r|的大小代表着变量间线性关系的强度。参数辨识本质是求解方程组Y=F( ,
, )。若控制参数高度相关,会导致雅可比矩阵J=∂F/∂(,)近似秩亏,使信息矩阵I=JTJ行列式det(I)≈0无法求逆,因此高度相关的参数会导致存在无限多组解(,),即控制参数间不强相关是参数可被唯一辨识的必要条件。相关系数的取值范围为-1~1,其绝对值大于0.8时则判定为强相关。
)。若控制参数高度相关,会导致雅可比矩阵J=∂F/∂(,)近似秩亏,使信息矩阵I=JTJ行列式det(I)≈0无法求逆,因此高度相关的参数会导致存在无限多组解(,),即控制参数间不强相关是参数可被唯一辨识的必要条件。相关系数的取值范围为-1~1,其绝对值大于0.8时则判定为强相关。
以图5结果为例进行具体分析:转子电流内环d轴比例系数Kp3d相对于转子电流控制器其他3个控制参数的相关系数如实线所示,虚线代表参数是否可被辨识的界线,Kp3d与Ki3d、Kp3q、Ki3q之间的相关系数逐次减小,说明d轴比例与积分参数间的关联性最大,但仍小于给定阈值0.8,因此可以判定电流内环控制器的4个控制参数可以被区分辨识。由于辨识过程中的每个环节只基于单个控制环,根据图5及附图1中的相关系数雷达图,转子电流内环、定子电压内环、功率外环及网侧电流环中的控制参数之间的相关系数值均满足要求,即后续可以通过算法辨识得到稳定唯一解。
2.2.1 一次侧短路故障下的参数轨迹灵敏度
对VSG-DFIG施加短路故障扰动,即在图1所示的线路设置三相短路故障,机侧控制器控制参数关于VSG-DFIG并网点出口侧输出的有功功率P和无功功率Q的灵敏度计算结果见表2。
分析表2中的控制器参数灵敏度计算值,得出以下结论:①机侧控制器为三环级联结构,一次侧短路情况下,3个控制环节共同作用,从灵敏度数值上看3个控制环节相互耦合[24],三级控制器间的灵敏度数值并无明显差距,同样对于网侧控制器,其两级控制参数的灵敏度数值更为接近,因此会使参数辨识结果误差增大;②在整体开展辨识参数前,需要随机给定所有控制器参数值,随机给定的值与控制器参数真值存在差距,前级功率环的控制参数轨迹灵敏度大于后级电压内环的控制参数灵敏度,导致前级功率环控制器参数的误差会显著影响后级电压内环控制器的参数辨识准确度[24]。因此,需要寻求一种在辨识后级控制器参数时可明显降低前级控制器参数灵敏度的方法,即下文中的扰动屏蔽法。
表2 一次侧短路故障下的参数灵敏度
Tab.2 The parameter sensitivity under a primary-side short-circuit fault
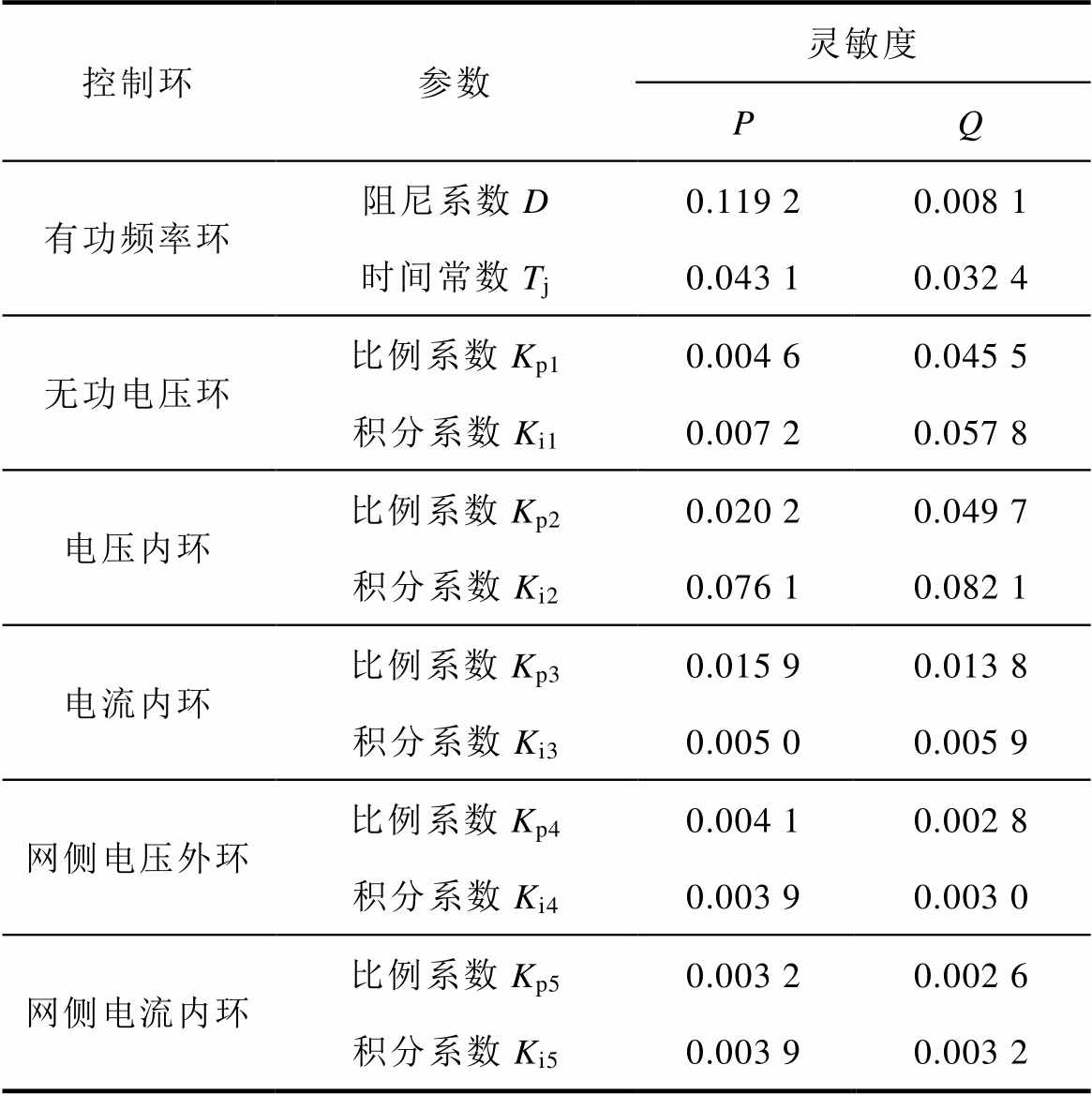
控制环参数灵敏度 PQ 有功频率环阻尼系数D0.119 20.008 1 时间常数Tj0.043 10.032 4 无功电压环比例系数Kp10.004 60.045 5 积分系数Ki10.007 20.057 8 电压内环比例系数Kp20.020 20.049 7 积分系数Ki20.076 10.082 1 电流内环比例系数Kp30.015 90.013 8 积分系数Ki30.005 00.005 9 网侧电压外环比例系数Kp40.004 10.002 8 积分系数Ki40.003 90.003 0 网侧电流内环比例系数Kp50.003 20.002 6 积分系数Ki50.003 90.003 2
2.2.2 多种测量扰动下的参数轨迹灵敏度
在对VSG-DFIG施加多种测量扰动计算其参数轨迹灵敏度前,首先要确定测量信号扰动的注入与屏蔽方式,具体实施方式如下:
首先是信号扰动选择方面,根据文献[25],参数辨识要求输入信号满足持续激励条件,即信号的功率谱密度在待辨识系统动态响应频带范围内不为零,通过充分激励系统的动态响应特性以实现参数辨识的一致性[26]。为满足持续激励条件,要求激励信号相对辨识系统具有足够宽的频带,因此本文基于上述准则选定扰动信号。本文的重点在于下文中的扰动屏蔽措施,因此具体的扰动信号选择依据与限定条件参照文献[27]。
通过对系统转子侧控制器的三级结构输入变量直接叠加扰动信号可以实现对控制器的持续激励,但是对于实际的转子侧控制器,其输入量Ps、Qs、usd、usq、ird和irq均为中间变量,是转子侧控制器根据输入的定转子电压、电流信号计算得到,在不修改转子侧控制器控制策略的前提下,无法实现在输入通道上叠加随机扰动信号。考虑到控制器之所以发生动作,是因为二次侧的测量回路检测到了一次侧电气量的变化。因此,本文后续扰动信号的叠加将从二次侧测量信号出发,通过在测量信号上叠加随机扰动信号进而实现参数辨识。Ps及Qs计算式如式(4)所示,通过对测量信号us与is施加扰动可实现对Ps与Qs的扰动叠加。关于测量信号扰动的具体注入方式如图6所示,下文将主要以转子侧电流内环控制器为例进行具体说明。
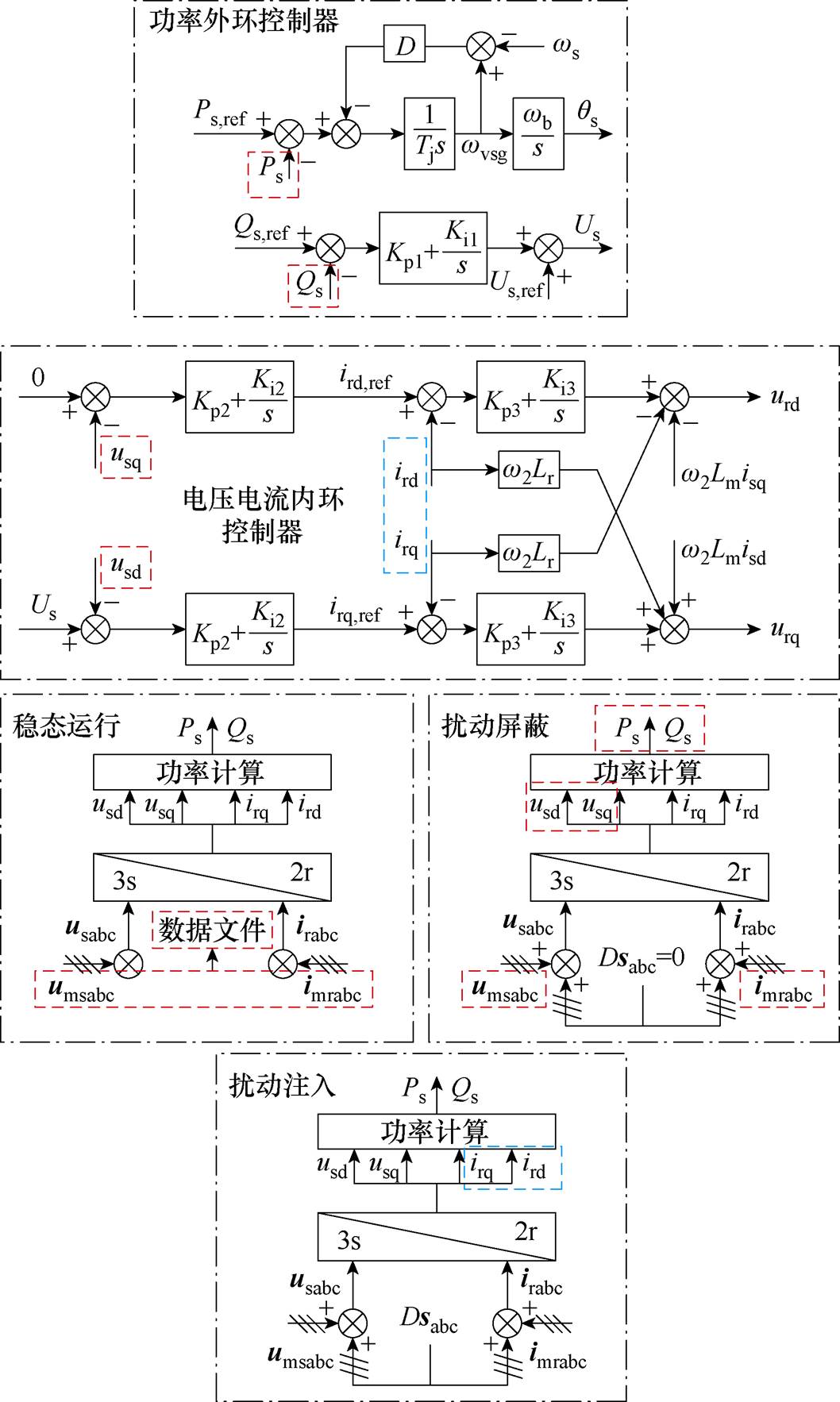
图6 转子电流内环扰动施加与屏蔽示意图
Fig.6 Schematic diagram of disturbance shielding applied to the rotor current inner loop
针对每一级控制器的扰动信号屏蔽方式如下:
(1)对机侧电流内环控制器进行参数辨识过程中,需对输入电流内环控制器的转子电流测量信号施加扰动,将其设定为扰动A,且屏蔽前级功率外环控制器中的输入功率扰动与电压内环控制器中的输入定子电压扰动,下面列举三环级联控制系统中扰动屏蔽策略的具体实施措施,示意图如图6所示:①首先确保VSG-DFIG所有控制环节处于稳态,将二次侧测量信号umsabc、imrabc进行记录;②重新运行VSG-DFIG系统至与步骤①相同的运行点,对转子电流信号imrabc施加扰动,并将输入到转子侧控制器中的各测量信号Ps、Qs、usd、usq替换为步骤①中由VSG-DFIG的预存信号,即由步骤①中保存的umsabc、imrabc经变换与计算得出的数据,红色虚线框内的信号为稳态状况下保存的数据,蓝色实线框内的信号为扰动注入情况下的输入信号。图中的Dsabc表示向测量信号输入的振动,Dsabc=0则表示屏蔽信号输入振动。
(2)转子侧电压内环控制器参数辨识过程是在电流内环参数辨识的基础上完成的,对转子侧电压内环控制器进行参数辨识过程中,需对输入电压内环的定子电压测量信号施加扰动,将此扰动设定为信号扰动B,且对功率外环的功率测量信号扰动进行屏蔽,具体实施措施与式(1)相同,即对定子电压信号施加扰动时将功率外环的输入信号替换为正常状况下记录的信号,由于转子电流内环控制器已辨识完成且灵敏度小于外环控制器,可不计其对外环的影响。对机侧功率外环控制器进行参数辨识过程中,由于已完成了对电压电流内环的参数辨识,因此只需对Ps信号与Qs信号施加扰动,将Ps信号扰动设定为扰动C,将Qs信号扰动设定为扰动D。
(3)对网侧电流内环控制器进行参数辨识过程中,由于直流电压控制器与电流内环控制器级联,因此,选择在网侧电流测量信号上施加扰动,将此扰动设定为信号扰动E,同时记录正常运行状态下的直流电容电压信号,具体措施如图7所示。图7中,Ds表示向测量信号输入的扰动,Ds=0则表示屏蔽输入信号扰动。
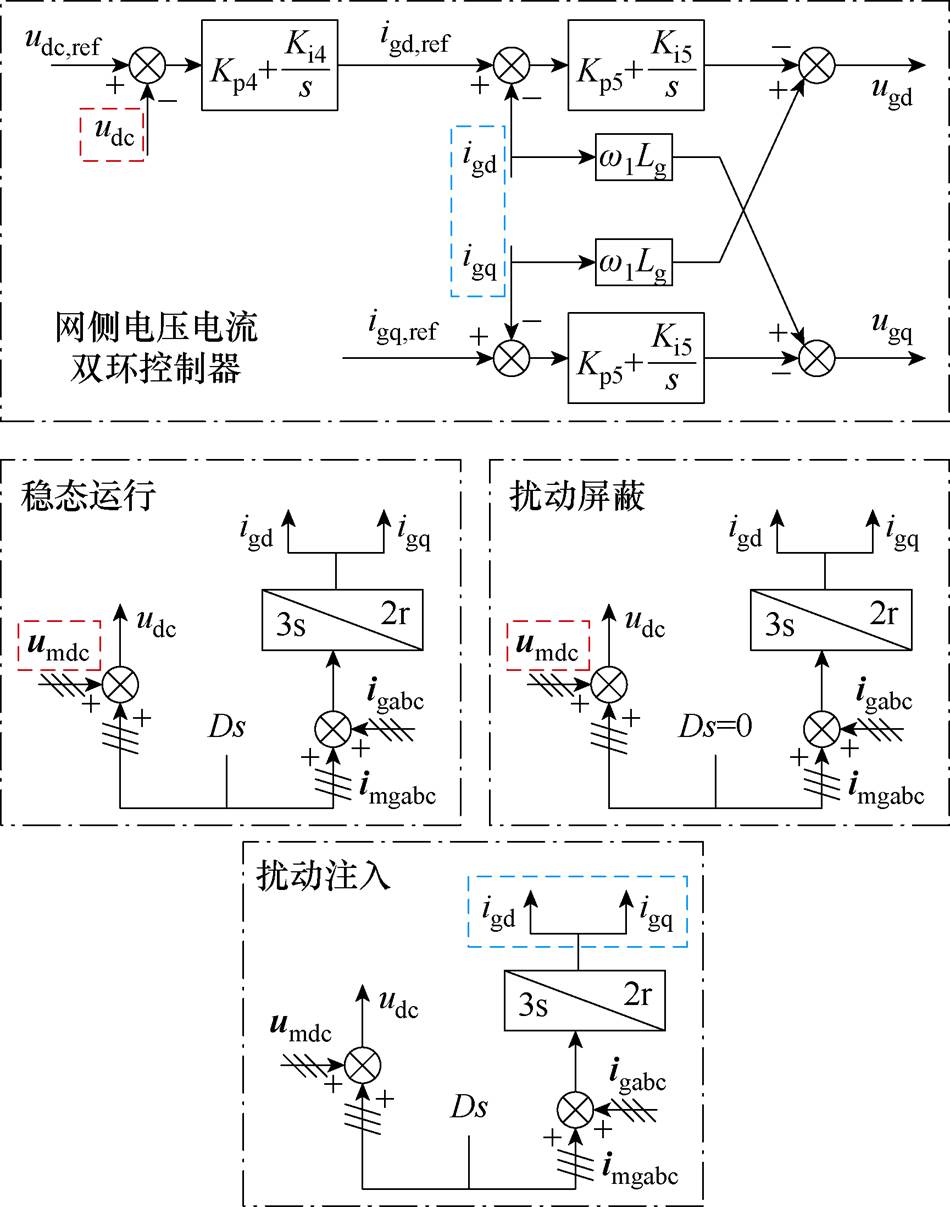
图7 网侧电流内环扰动施加与屏蔽示意图
Fig.7 Schematic diagram of disturbance application and shielding in the grid-side current inner loop
(4)对于网侧直流电压外环控制器,只需在直流电压的测量信号上施加扰动即可进行辨识,将此扰动设定为信号扰动F。所有扰动方式的扰动幅度、持续时间与观测时间见表3。
表3 不同种信号扰动的具体设定
Tab.3 The specific settings for different types of signal disturbances
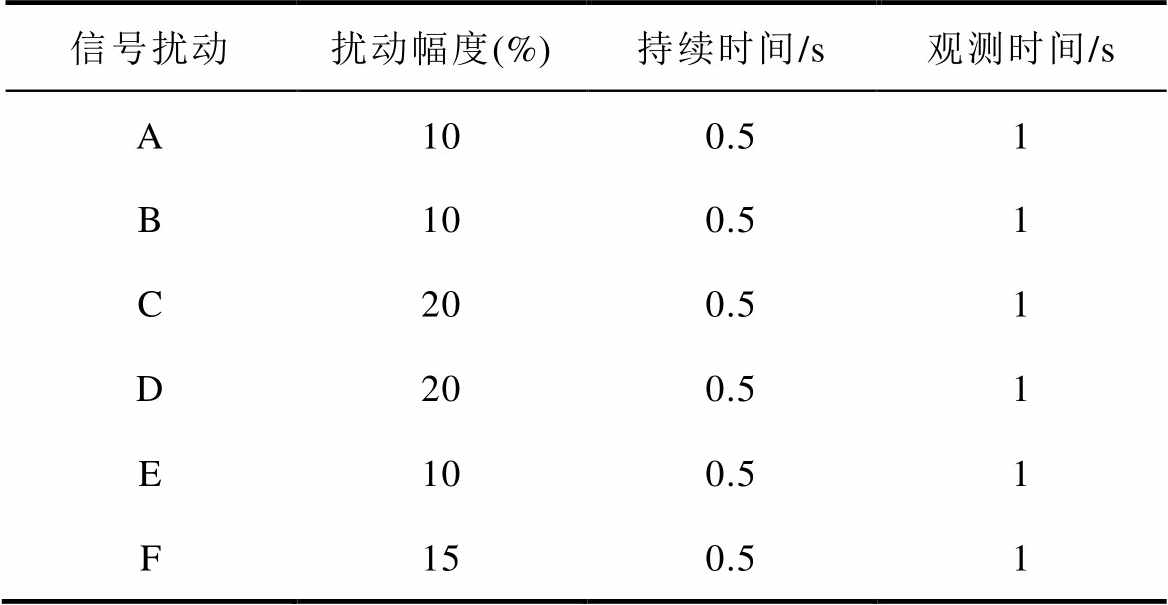
信号扰动扰动幅度(%)持续时间/s观测时间/s A100.51 B100.51 C200.51 D200.51 E100.51 F150.51
图8与图9以热力图的形式列举了以和 为观测量时不同种信号扰动下的所有控制参数轨迹灵敏度平均值,其中右侧条形框以颜色深浅代表各控制参数灵敏度的大小,即图中的对应区块颜色越深表明该控制参数在此扰动下的灵敏度越大,分析图中数据,可以得到以下几点结论:
为观测量时不同种信号扰动下的所有控制参数轨迹灵敏度平均值,其中右侧条形框以颜色深浅代表各控制参数灵敏度的大小,即图中的对应区块颜色越深表明该控制参数在此扰动下的灵敏度越大,分析图中数据,可以得到以下几点结论:
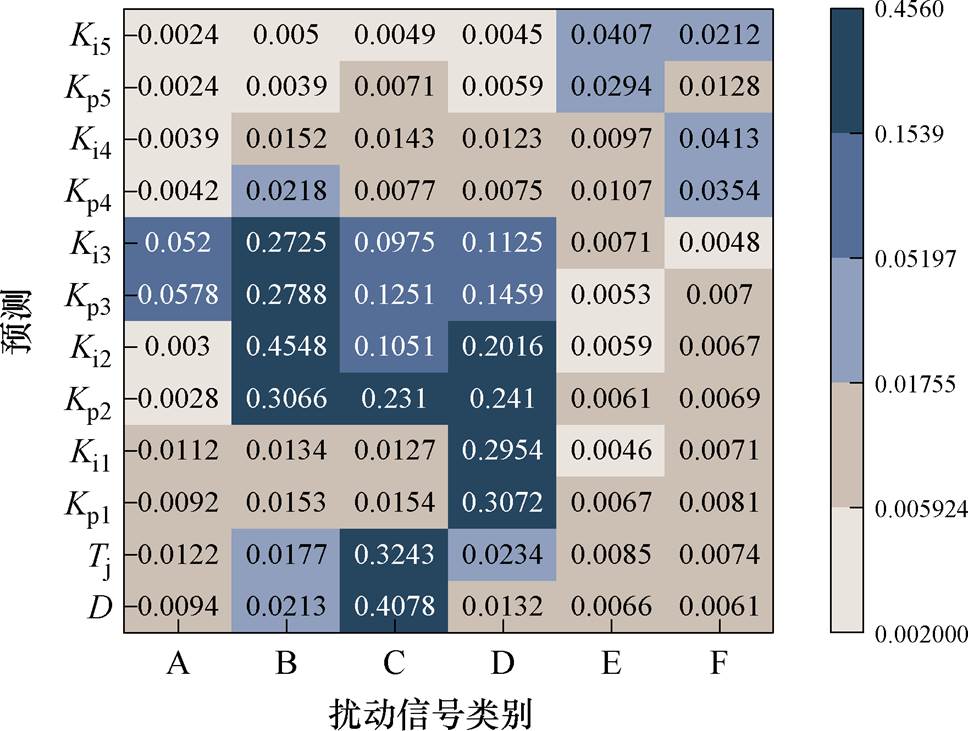
图8 观测量 控制参数灵敏度
控制参数灵敏度
Fig.8 Control parameter sensitivity under observation of
(1)扰动A作用于转子电流控制器,令转子电流控制器开始动作,与表2结果相比,由于屏蔽定子电压测量信号扰动与功率测量信号扰动,功率外环控制器参数D、Tj、Kp1、Ki1与定子电压环控制器参数Kp2、Ki2的灵敏度大幅度降低,即前级控制器控制参数的随机给定对转子电流控制器控制参数Kp3、Ki3辨识精度的影响被减小[28]。
(2)扰动B作用于定子电压测量信号,定子电压控制器开始动作,在屏蔽功率外环输入信号扰动的前提下,大幅降低功率外环控制器参数D、Tj、Kp1、Ki1的灵敏度,虽然转子电流内环控制器参数Kp3、Ki3的灵敏度并非远低于定子电压环控制器参数灵敏度,但先前已对转子电流内环参数完成辨识,其控制器参数值已逼近真值,因此其对定子电压环控制器参数的辨识结果影响较小。
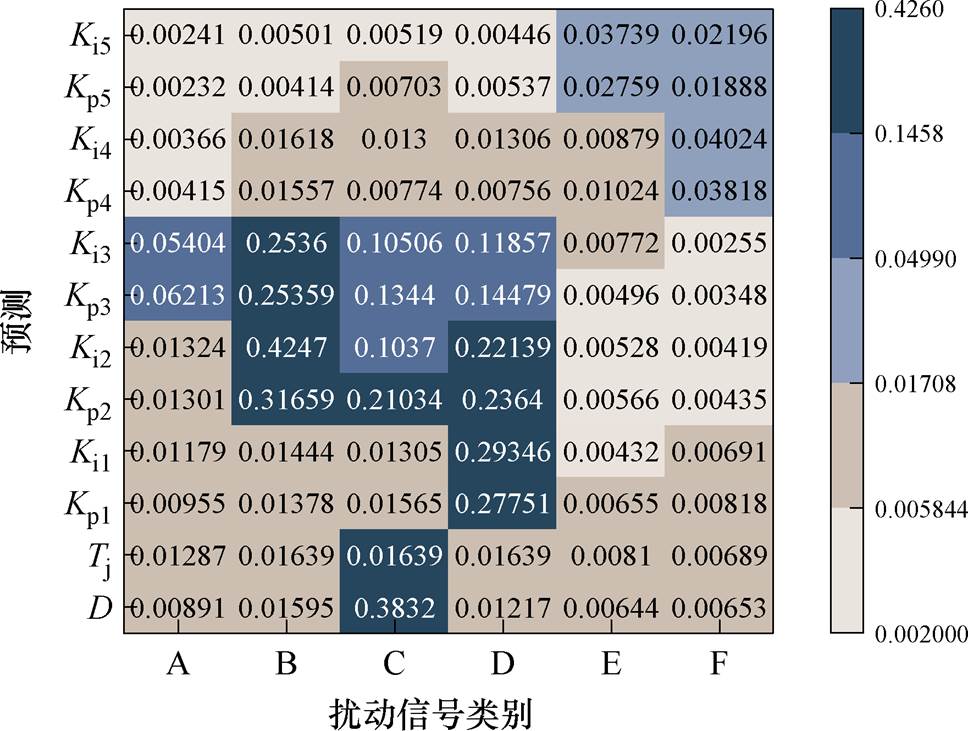
图9 观测量 控制参数灵敏度
控制参数灵敏度
Fig.9 Control parameter sensitivity under observation of
(3)将信号扰动C与信号扰动D作用于功率外环控制器时,后级控制器参数灵敏度与前级控制器灵敏度差距较小,但由于后级控制器控制参数已辨识完成,所以对D、Tj、Kp1、Ki1的辨识精度影响较小。
(4)将信号扰动E作用于网侧电流内环控制器,在屏蔽直流电压扰动的情况下,电压外环控制器参数Kp4、Ki4的灵敏度明显小于电流内环控制器参数Kp5、Ki5的灵敏度,从而可以实现在信号扰动E下对电流内环控制器参数Kp5、Ki5进行辨识。
(5)将信号扰动F作用于网侧直流电压外环控制器,除直流电压外环与电流内环控制器外,其余控制器参数灵敏度均较小,由于先前已辨识完成电流内环控制器参数Kp5、Ki5,所以电流内环控制器参数的高灵敏度不会影响电压环辨识结果,从而可以在信号扰动F下单独辨识Kp4、Ki4。
传统的参数辨识算法容易陷入局部最优解,尤其是在VSG-DFIG这样的非线性模型中,一些优化算法可能需要大量的迭代才能收敛,计算时间过长,某些优化算法的初始值选择对最终结果影响较大,不合适的初始值可能导致算法无法收敛或收敛到错误的解。阿尔法进化(Alpha Evolution, AE)算法是一种新型的元启发式优化算法,灵感来源于自适应步长的Alpha算子更新解。该算法通过优化信息提取和利用过程,其算法适用性广,对目标函数要求低,能够实现全局优化,满足VSG-DFIG控制参数辨识多目标优化需求。因此本文采用阿尔法进化算法对VSG-DFIG的控制参数进行辨识。
改进AE算法是在AE算法的基础上引入了混沌初始化与自适应变异机制。对于种群初始化问题,采用混沌映射中的Logistic映射进行处理,Logistic映射定义为
 (13)
(13)
式中, 为混沌映射的参数,通常取值为4,以保证系统的混沌性;xn为种群中序号为n的个体。
为混沌映射的参数,通常取值为4,以保证系统的混沌性;xn为种群中序号为n的个体。
利用混沌映射生成的初始种群为
 (14)
(14)
式中,lb和ub分别为搜索空间的下界和上界;Xi为初始种群中序号为i的个体。
从初始种群X中采样得到子集 ,子集E中包含多个初始种群中的个体,将其作为进化矩阵,并使用Alpha算子更新解为
,子集E中包含多个初始种群中的个体,将其作为进化矩阵,并使用Alpha算子更新解为
 (15)
(15)
式中, 为迭代次数为t的进化矩阵中序号为i的个体;
为迭代次数为t的进化矩阵中序号为i的个体; 为随机系数;
为随机系数; 为Alpha操作符;Wi和Li为从进化矩阵中随机采样的解,通过进化矩阵的对角线或加权操作估计种群状态,得到进化路径P。
为Alpha操作符;Wi和Li为从进化矩阵中随机采样的解,通过进化矩阵的对角线或加权操作估计种群状态,得到进化路径P。
在式(15)基础上引入自适应变异机制,具体为
 (16)
(16)
 (17)
(17)
 (18)
(18)
式中,Pm,min和Pm,max分别为变异概率的最小值和最大值; 和
和 分别为变异步长的最小值和最大值;a和b为控制变异参数变化速度的参数。
分别为变异步长的最小值和最大值;a和b为控制变异参数变化速度的参数。
最后执行选择策略,将进化成功的解传递给下一代,即
 (19)
(19)
式中,F(Ei)为个体的适应度,选择策略目的是保证优秀的个体有更大的概率被保留。
基于2.1节中各控制参数在各信号扰动下的评价系数,设置待求解的目标函数,选取观测量 与
与 的加权组合作为目标函数中的变量。
的加权组合作为目标函数中的变量。
首先,对转子电流内环参数进行辨识,根据2.1节中的结果,选择isd与P为观测量,目标函数为
 (20)
(20)
式中,Fk3,min为转子电流内环辨识目标函数的最小值; 和
和 分别为待辨识转子电流比例积分控制参数关于isd与P的灵敏度系数;
分别为待辨识转子电流比例积分控制参数关于isd与P的灵敏度系数; 和
和 为三级控制器参数关于观测量的灵敏度系数之和;
为三级控制器参数关于观测量的灵敏度系数之和; 和
和 为观测量的数值误差;nstart、nend分别为观测量中数据点序列的初始序号和结束序号。
为观测量的数值误差;nstart、nend分别为观测量中数据点序列的初始序号和结束序号。
其次,对定子电压内环参数进行辨识,根据2.1节结果,选择P与isd作为观测量,目标函数为
 (21)
(21)
式中,Fk2,min为定子电压内环辨识目标函数的最小值; 与
与 为定子电压环控制参数关于观测量的灵敏度系数,由于转子电流内环参数已被辨识完成,
为定子电压环控制参数关于观测量的灵敏度系数,由于转子电流内环参数已被辨识完成, 和
和 仅为功率外环与定子电压内环控制参数灵敏度系数之和。
仅为功率外环与定子电压内环控制参数灵敏度系数之和。
最后,对功率外环参数进行辨识,根据2.1节结果,选择isd与P作为观测量,目标函数为
 (22)
(22)
式中,Fk1,min为功率外环辨识目标函数的最小值。对于网侧变流器,沿用本节的思路即可对其进行双环参数进行辨识。
基于改进AE算法的参数辨识流程如图10所示。首先对AE算法参数进行初始化,设定种群规模为50,最大迭代次数为30,混沌映射参数为4,最大变异概率和最小变异概率分别为0.2和0.01,最大变异步长和最小变异步长搜索区间的10%和1%。对种群进行混沌初始化后,进化变异操作,并进行边界约束,判断迭代完成时种群中的最优个体是否满足误差要求,若不满足则重新进行种群采样,最后迭代完成后种群中的最优个体即为参数辨识最优值。
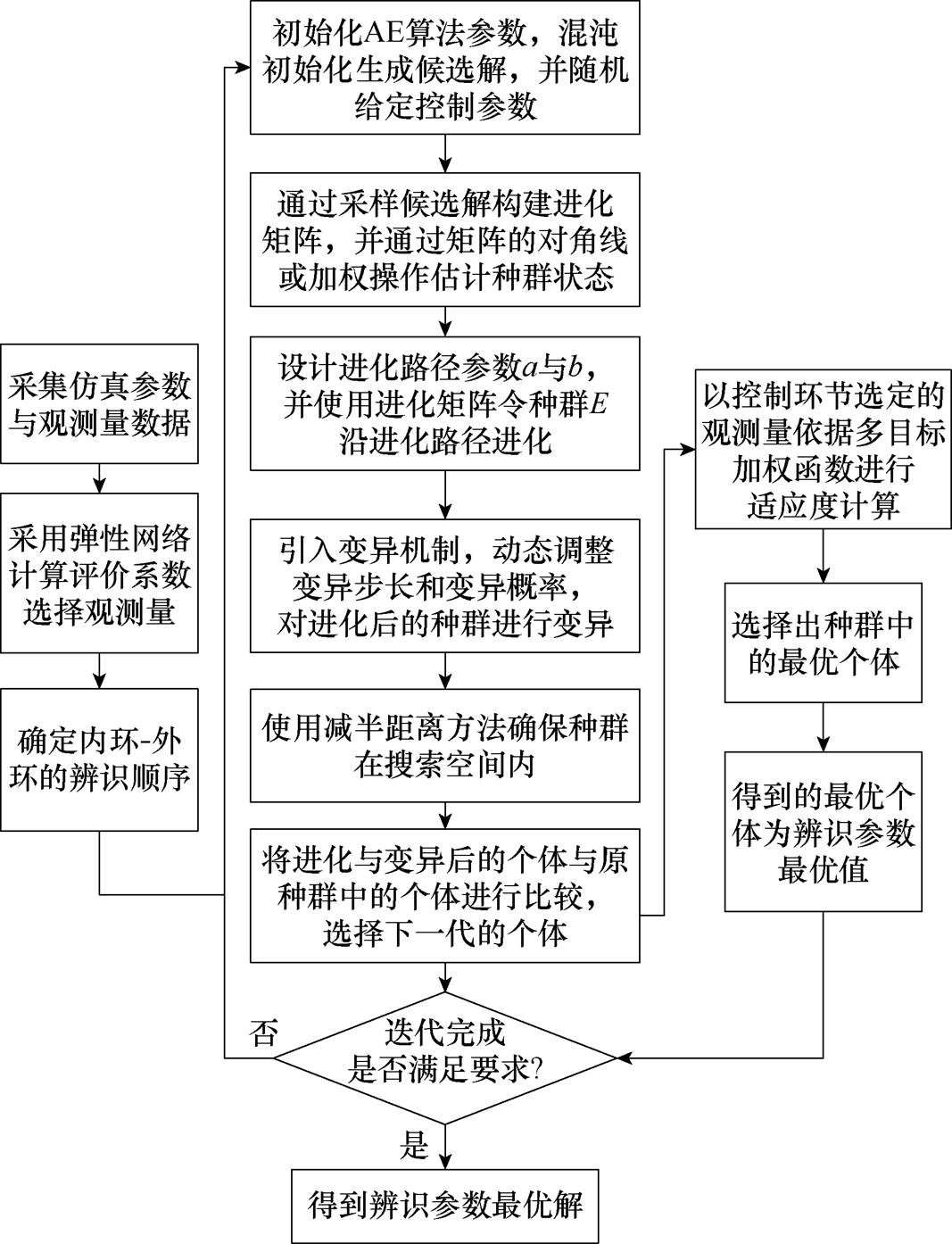
图10 参数辨识整体流程
Fig.10 Overall flowchart of parameter identification
基于仿真平台搭建与VSG-DFIG实际控制器结构一致的待辨识模型,以初始控制器参数获取其真实输出数据,通过仿真对比验证扰动屏蔽策略的有效性。
本节将设定三种策略进行对比分析,具体策略设定如下:策略1为在传统一次侧设定短路故障的条件下,以P、Q求和优化为目标函数进行分级参数辨识;策略2为实施扰动屏蔽策略的背景下,以多目标加权求和为目标函数进行参数辨识;策略3选择与策略2相同的辨识策略,但选用未经改进的AE算法进行参数辨识,以对比混沌初始化与自适应变异机制对于算法的提升效果。以上各策略均通过计算10次各辨识结果的均值来描述算法辨识的准确性。三种策略均依据经验值给定前级控制器控制参数,辨识参数结果见附表1,辨识误差如图11所示。
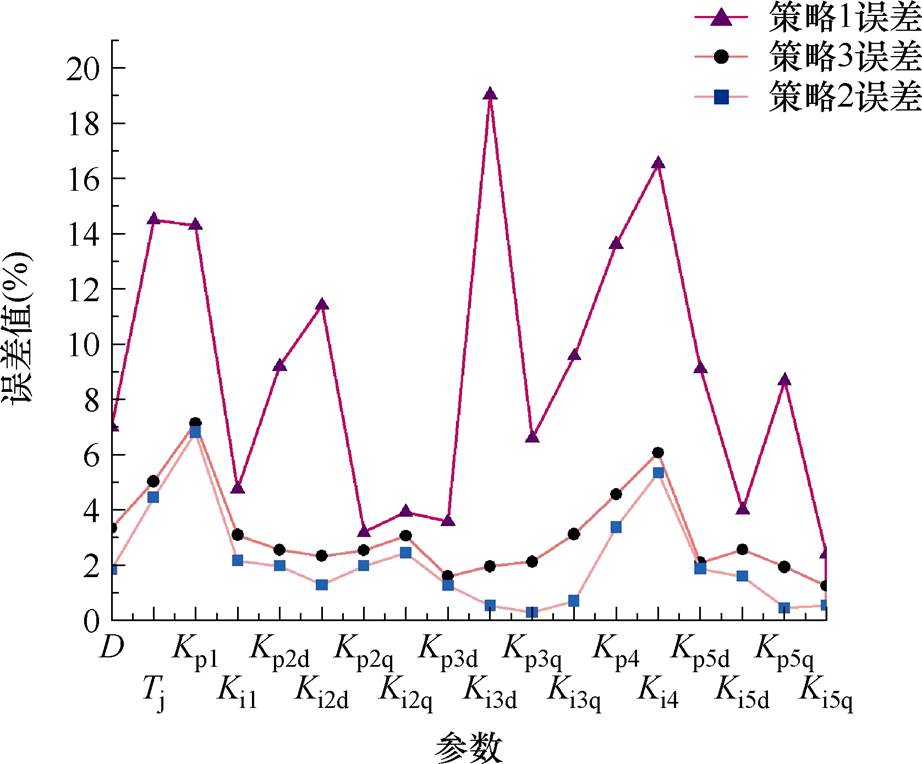
图11 三种策略的辨识误差
Fig.11 Identification errors of the three strategies
本节共涉及三种策略:策略1为2.2.1节中进行灵敏度分析所使用的策略,用于对比验证;策略2为2.2.2节中扰动屏蔽策略与第3节中多目标加权策略的结合;策略3与策略2的辨识策略相同,但使
用未经改进的AE算法,用于验证改进AE算法的提升效果。分析图11中参数辨识误差结果:策略1的参数辨识结果误差明显大于策略2与策略3的参数辨识结果,且部分控制参数误差比例过大,其原因为前级控制器参数依据经验设定初始值,策略2与策略3绝大多数控制参数的辨识结果误差均保持在5%以内,但策略3的大部分结果误差要大于策略2,以电流内环参数辨识结果误差为例比较策略1与策略2,策略2中Kp3d的结果误差降低了约2.32%,Kp3q的结果误差降低了约6.04%,说明扰动屏蔽策略在VSG-DFIG的参数辨识方面具有明显优势。
图12与图13为针对转子侧控制器电流内环参数辨识过程中采用策略2中的AE算法与策略3中的改进AE算法收敛速度与寻优精度对比。根据图12结果分析可得:改进AE算法由于引入混沌初始化,其混沌化初始化后的种群会出现较普通AE算法更优秀的适应解,在初次迭代过程中辨识目标函数值下降约21%,为后续寻优迭代奠定基础;对比两种算法的收敛值,改进AE算法辨识目标函数值下降约24%,代表引入自适应变异机制后对于最终寻优精度的提高具有一定积极作用;对比两种算法达到收敛值的迭代次数,由引入改进机制前的48次减少到改进后的23次,即消耗的运行时间减少约50%,证明引入自适应变异机制后迭代过程中的寻优速度有了显著提升。
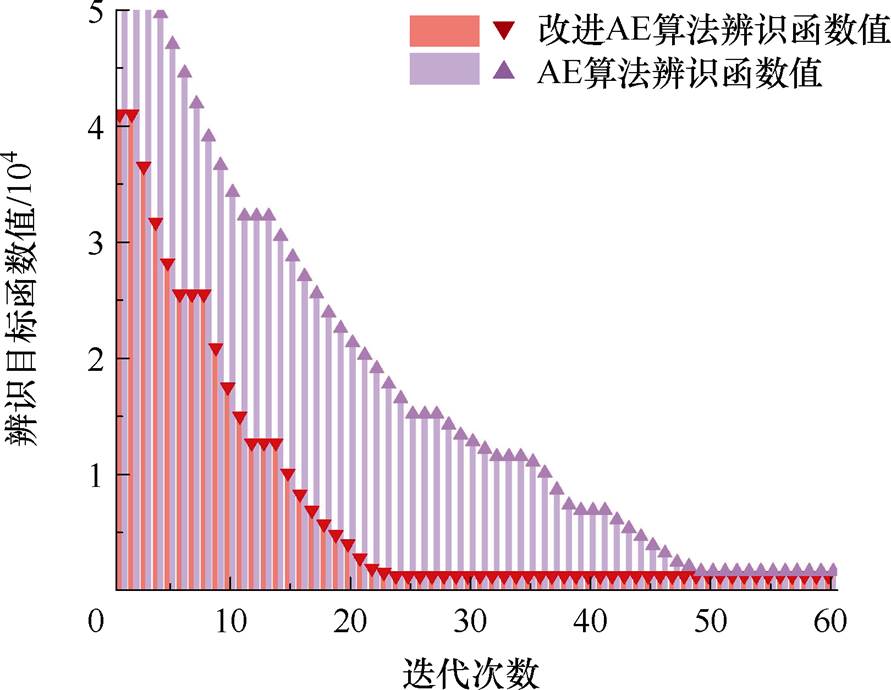
图12 AE算法与改进AE算法辨识目标函数值收敛
Fig.12 The convergence curves of the objective function values for identification using the AE algorithm and the enhanced AE algorithm
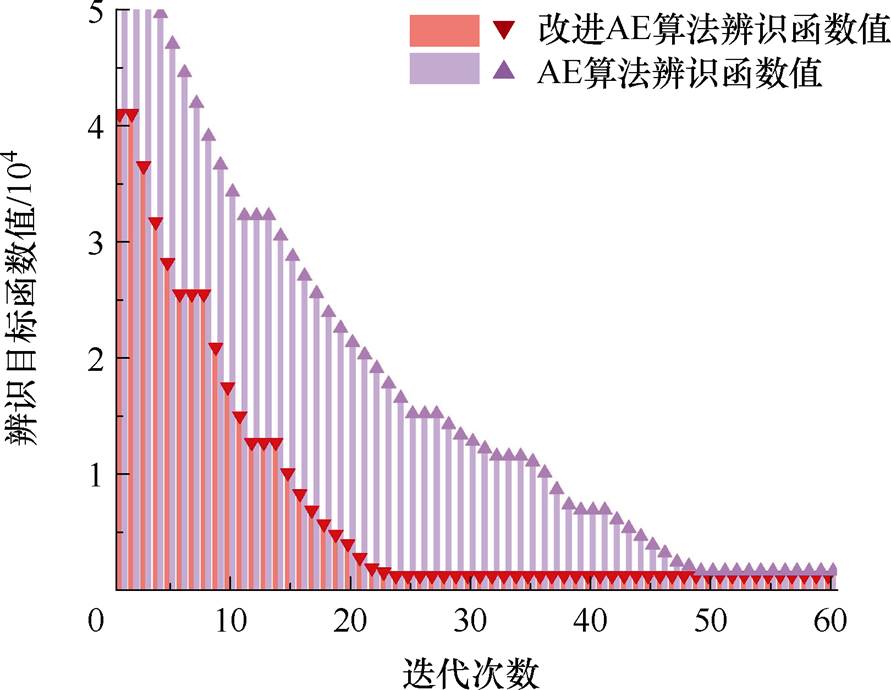
图13 AE算法与改进AE算法辨识参数值Ki3d收敛
Fig.13 Convergence graph of parameter Ki3d identified by AE algorithm and improved AE algorithm
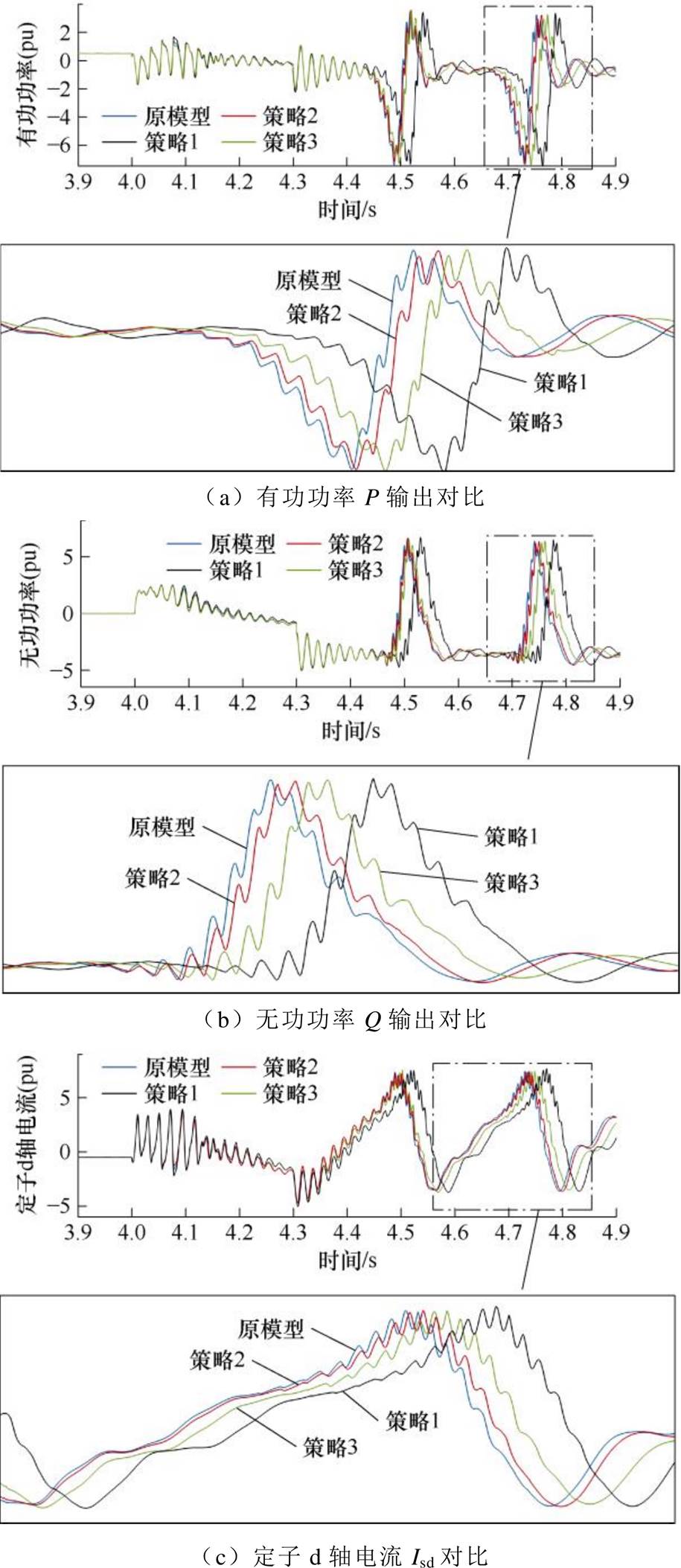
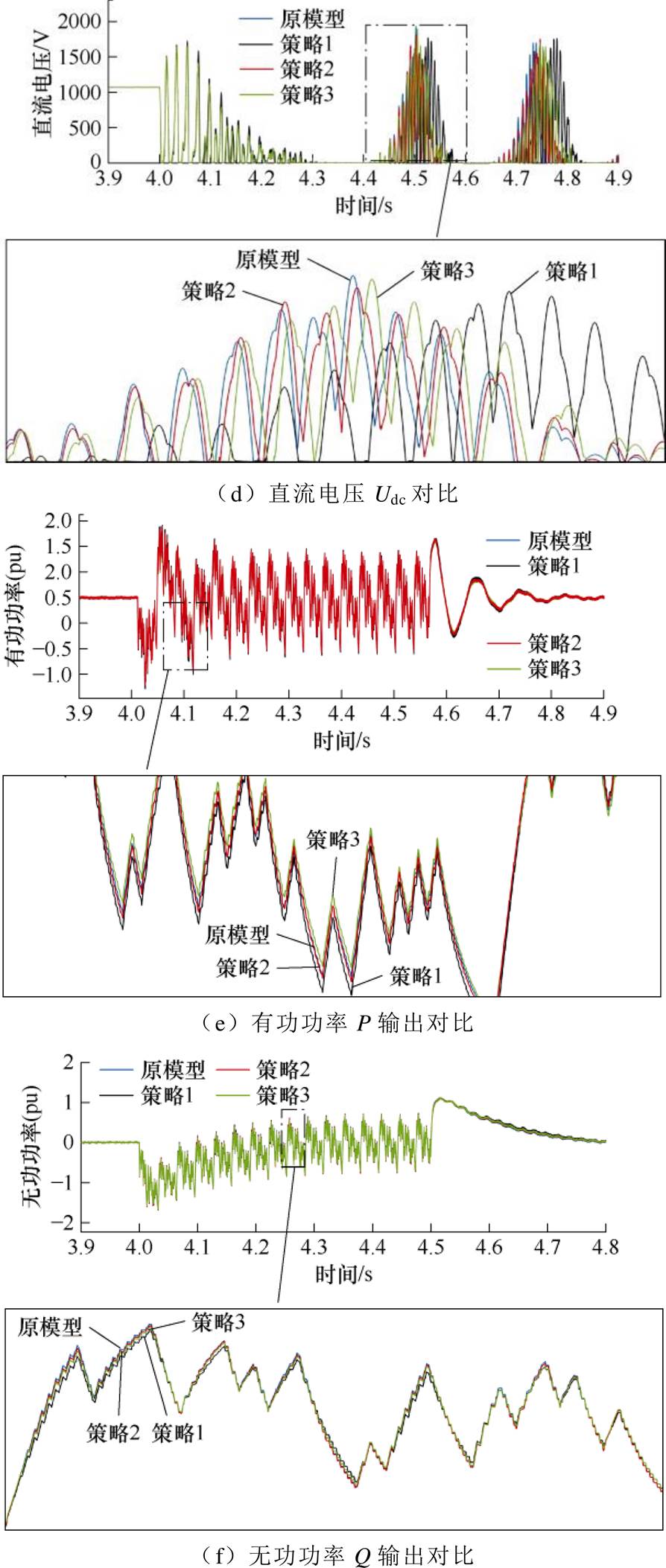
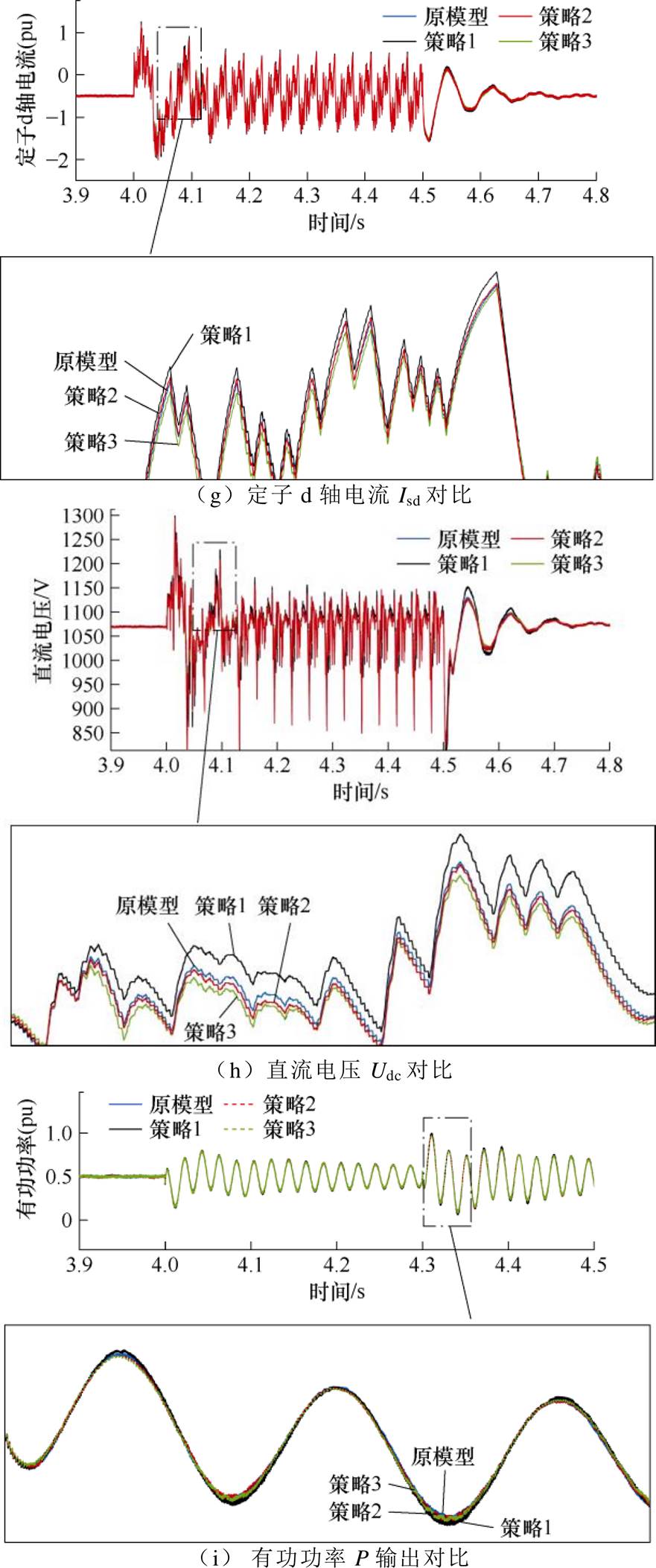
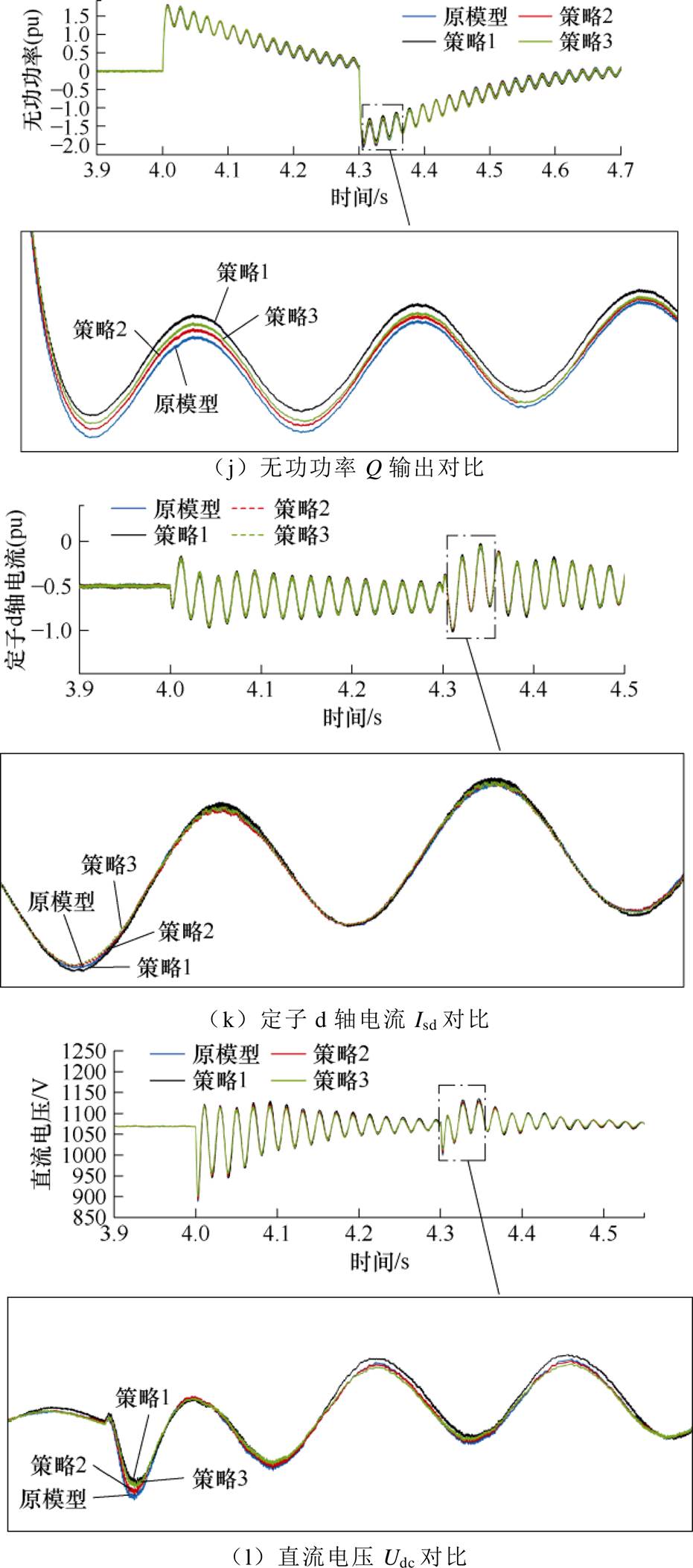
不同程度的信号扰动引起的控制器动态响应有所不同,为验证EN-AE策略的有效性与不同背景下的适应性,设置四组不同的机端电压跌落与扰动情况:①机端电压跌落幅度Dm=50%,在一次侧故障清除时发生暂态失稳现象;②机端电压跌落幅度Dm=20%,在一次侧故障清除后逐步恢复稳态;③对转子侧以及网侧控制器中所有输入信号叠加正弦扰动信号;④对转子侧以及网侧控制器中所有输入信号叠加随机扰动信号。代入三种策略寻优辨识的结果,将有功功率P、无功功率Q、直流电压Udc和定子d轴电流Isd输出波形对比并对参数辨识结果进行误差分析。其中条件③下的对比结果如图14所示,条件①②④下的对比结果如附图2所示。
通过分析图14中的四组观测量对比可以看出,当对VSG-DFIG控制器注入扰动时,采用三种策略辨识得到的输出响应数据与实际输出波形具有相同的动态特性,与实际输出波形较为贴合,但策略1的输出波形与实际输出波形的幅值差远大于策略2和策略3,而策略3的响应数据与实际输出波形的幅值差要略小于策略2,说明本文提出的扰动屏蔽策略在辨识VSG-DFIG控制器参数领域要显著优于一次侧短路故障策略,且改进AE算法相较于原始AE算法有一定提升。
通过分析附图2中Dm=50%的四组观测量对比可以看出,当故障发生系统处于暂态失稳状态时,采用策略1辨识得到的输出响应数据则与实际输出波形的动态一致性较差,而采用策略2与策略3辨识得到的输出响应数据与实际输出波形在动态调节过程中则具有相同的趋势,与实际输出波形较为贴合,说明本文提出的扰动屏蔽策略在辨识VSG- DFIG系统控制器参数领域要显著优于传统的一次侧短路故障策略;而采用策略2较策略3在暂态失稳区间各观测量幅值更加接近,则进一步说明了改进AE算法较原始AE算法辨识的VSG-DFIG转子侧与网侧控制系统参数与实际参数更为接近。
综合上述分析结果,采用策略2得到的输出响应波形和实测数据拟合度更高,即策略2得到的参数更接近真实值,且持续注入扰动信号的背景下相较于故障后暂态过程的拟合度更高。
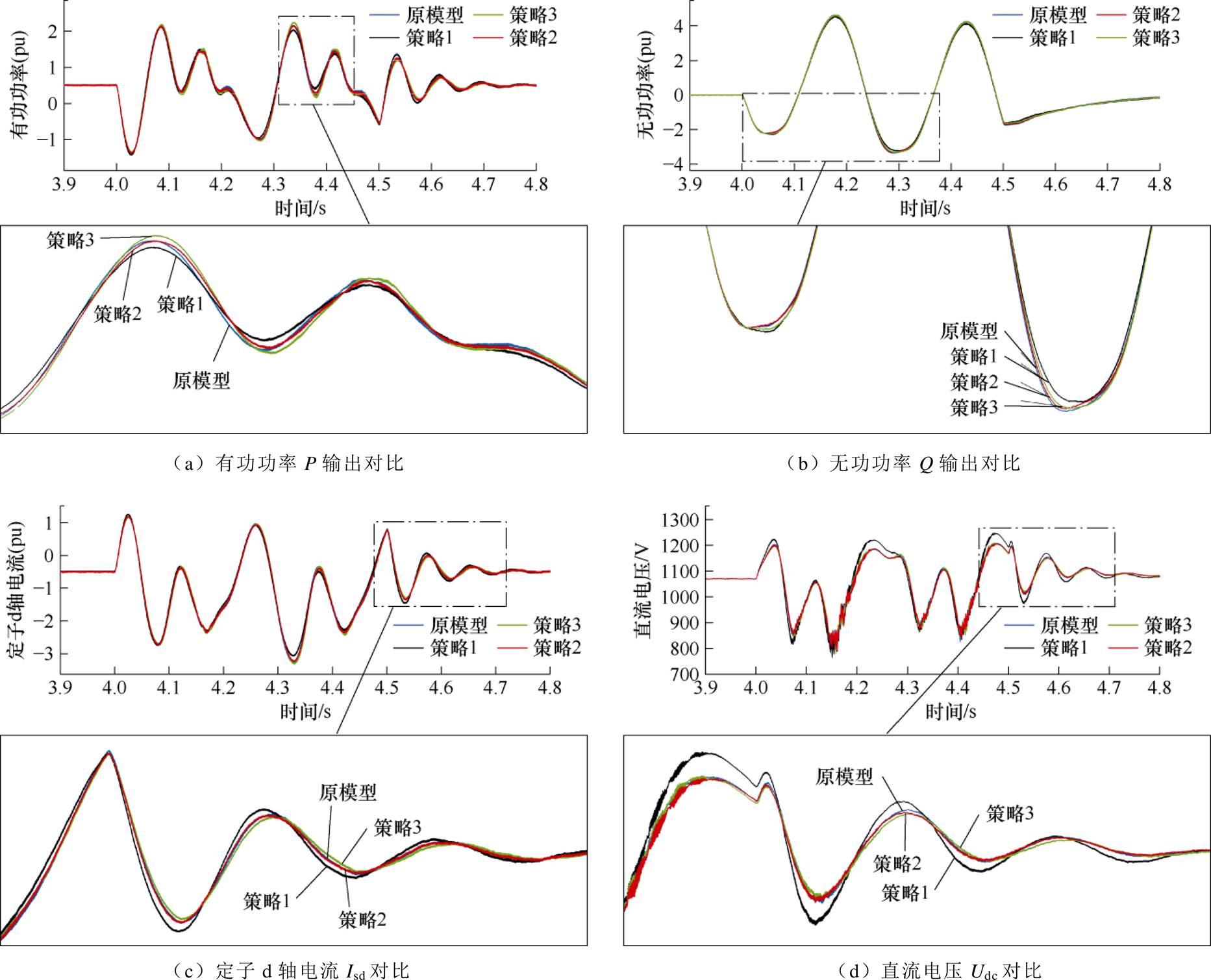
图14 输入信号持续扰动背景下的响应波形对比
Fig.14 Comparison of response waveforms under continuous disturbance excitation of input signals
以平均绝对百分比误差(Mean Absolute Percentage Error, MAPE)来评价辨识模型与原模型在观测量上的误差,如式(23)所示,将三种策略整体辨识得到的结果求取平均百分比误差,其输出响应辨识误差在三种验证环境下的结果如图15所示。
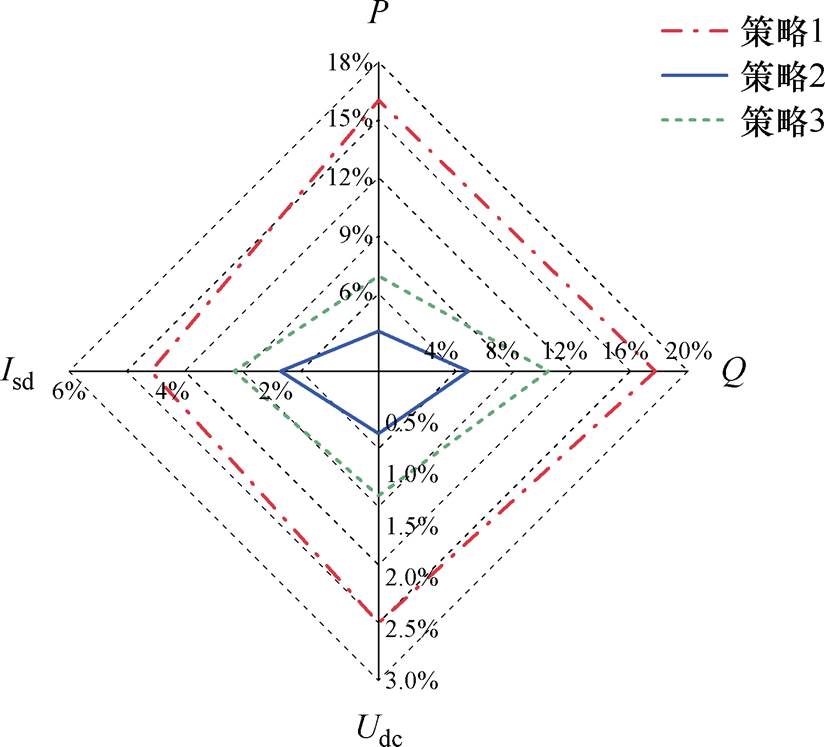
图15 风电机组观测量误差对比
Fig.15 Wind turbine measurement error comparison
 (23)
(23)
式中, 为实际值;
为实际值; 为预测值。
为预测值。
分析图15可知:相比于一次侧短路故障与传统目标函数结合的辨识策略,扰动屏蔽法结合多目标加权求和辨识策略在各观测量区间的辨识结果都更加接近真实输出数据,且改进AE算法能够进一步提升辨识结果的精度,上述结果验证了本文扰动屏蔽与参数辨识策略的有效性。
针对传统辨识背景下的构网型双馈风力发电机控制参数辨识问题,本文采用扰动屏蔽技术,相比于现有的关于VSG-DFIG系统控制参数辨识方法,本文方法降低参数耦合影响,将多级控制器参数的灵敏度从数值上解耦,且不依赖于特定的故障条件,适用于多种工况。通过多目标加权优化模型,综合考虑多个观测量的灵敏度,优化参数辨识过程,提高了参数辨识的精度。以改进的阿尔法进化算法作为辨识方法,并利用仿真模型进行验证,得到以下结论:
1)一次侧短路故障背景下多级控制环节的参数灵敏度相互耦合,导致辨识困难;利用扰动屏蔽法分析观测量可得到风机变流器控制参数关于观测量的灵敏度,利用对前级扰动进行屏蔽可显著降低前级控制器参数的灵敏度,且能够显著提高构网型双馈风力发电机参数辨识的准确度。
2)利用弹性网络与多目标加权方法选择辨识目标函数可提高辨识的精度,改进AE算法相较于原始AE算法的收敛速度与精度均有提升,证明引入混沌初始化与自适应变异机制后对VSG-DFIG系统参数辨识精度有显著提升。
3)机端电压跌落工况与扰动叠加工况下的对比结果证实了所提出的多目标加权求和结合扰动屏蔽策略的辨识方法可有效提高构网型双馈风力发电机组控制参数的辨识精度和可靠性。
附 录
附图1为控制环节参数相关系数雷达图。附表1为VSG-DFIG控制参数真值与辨识结果。附图2为输入信号扰动与机端电压跌落情况时的响应波形对比。
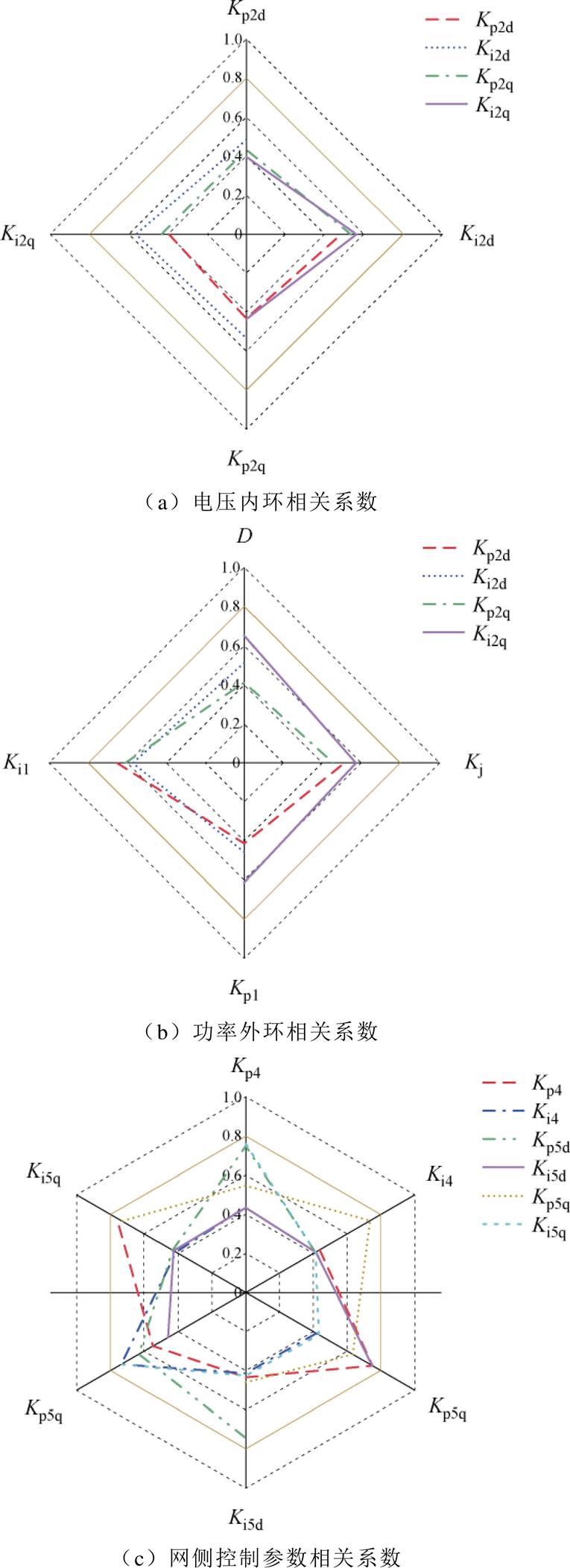
附图1 控制环节参数相关系数雷达图
App.Fig.1 Control link parameter correlation coefficient radar map
附表1 参数真值与辨识结果
App.Tab.1 Parameter true value and identification result
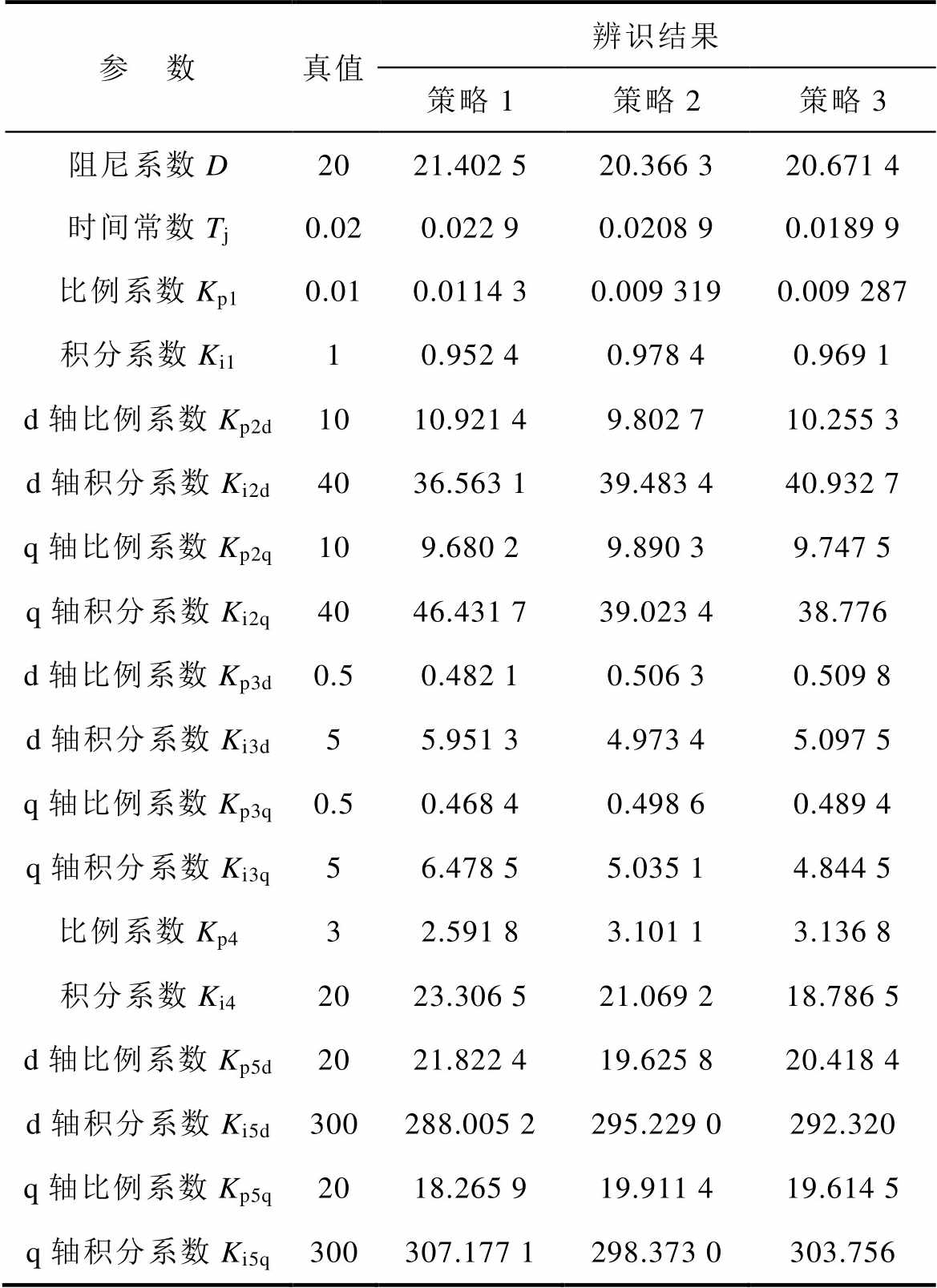
参 数真值辨识结果 策略1策略2策略3 阻尼系数D2021.402 520.366 320.671 4 时间常数Tj0.020.022 90.0208 90.0189 9 比例系数Kp10.010.0114 30.009 3190.009 287 积分系数Ki110.952 40.978 40.969 1 d轴比例系数Kp2d1010.921 49.802 710.255 3 d轴积分系数Ki2d4036.563 139.483 440.932 7 q轴比例系数Kp2q109.680 29.890 39.747 5 q轴积分系数Ki2q4046.431 739.023 438.776 d轴比例系数Kp3d0.50.482 10.506 30.509 8 d轴积分系数Ki3d55.951 34.973 45.097 5 q轴比例系数Kp3q0.50.468 40.498 60.489 4 q轴积分系数Ki3q56.478 55.035 14.844 5 比例系数Kp432.591 83.101 13.136 8 积分系数Ki42023.306 521.069 218.786 5 d轴比例系数Kp5d2021.822 419.625 820.418 4 d轴积分系数Ki5d300288.005 2295.229 0292.320 q轴比例系数Kp5q2018.265 919.911 419.614 5 q轴积分系数Ki5q300307.177 1298.373 0303.756
附图2 输入信号扰动与机端电压跌落情况时的响应波形对比
App.Fig.2 Comparison of response waveforms under input signal disturbance and generator terminal voltage sag conditions
参考文献
[1] 黄萌, 舒思睿, 李锡林, 等. 面向同步稳定性的电力电子并网变流器分析与控制研究综述[J]. 电工技术学报, 2024, 39(19): 5978-5994.
Huang Meng, Shu Sirui, Li Xilin, et al. A review of synchronization-stability-oriented analysis and control of power electronic grid-connected converters[J]. Transactions of China Electrotechnical Society, 2024, 39(19): 5978-5994.
[2] Fan Bo, Liu Teng, Zhao Fangzhou, et al. A review of current-limiting control of grid-forming inverters under symmetrical disturbances[J]. IEEE Open Journal of Power Electronics, 2022, 3: 955-969.
[3] 潘学萍, 温荣超, 鞠平, 等. 双馈风电机组网侧控制器参数辨识的频域方法[J]. 电网技术, 2015, 39(3): 634-638.
Pan Xueping, Wen Rongchao, Ju Ping, et al. A frequency-domain based method to identify parameters of grid side converter controller for doubly fed induction generators[J]. Power System Technology, 2015, 39(3): 634-638.
[4] 李梦杰, 谢震, 徐上, 等. 弱电网下构网型双馈风电机组直流动态分析及优化控制策略[J]. 电力系统自动化, 2024, 48(14): 129-138.
Li Mengjie, Xie Zhen, Xu Shang, et al. DC-link dynamics analysis and optimal control strategy for grid-forming DFIG-based wind turbines in weak grid[J]. Automation of Electric Power Systems, 2024, 48(14): 129-138.
[5] 尹彦博, 许伯强, 吴京隆, 等. 考虑潜变量影响的风电机组双馈感应发电机故障检测方法[J]. 电工技术学报, 2026, 41(2): 527-540.
Yin Yanbo, Xu Boqiang, Wu Jinglong, et al. Fault detection method for wind turbines considering latent variable influences variable regression[J]. Transa- ctions of China Electrotechnical Society, 2026, 41(2): 527-540.
[6] Li Youtao, Zeng Yun, Qian Jing, et al. Parameter identification of DFIG converter control system based on WOA[J]. Energies, 2023, 16(6): 2618-2636.
[7] 邓俊, 崔浩瀚, 晁璞璞, 等. 基于主导特性解析的双馈风机控制器参数高效并行辨识方法[J]. 电力自动化设备, 2025, 45(4): 60-66.
Deng Jun, Cui Haohan, Chao Pupu, et al. Efficient parallel identification method of DFIG controller parameters based on dominant response characteristic analysis[J]. Electric Power Automation Equipment, 2025, 45(4): 60-66.
[8] 潘学萍, 鞠平, 温荣超, 等. 解耦辨识双馈风电机组转子侧控制器参数的频域方法[J]. 电力系统自动化, 2015, 39(20): 19-25, 108.
Pan Xueping, Ju Ping, Wen Rongchao, et al. Decoupling estimation of parameters in rotor side controller of DFIG-based wind turbine by frequency domain method[J]. Automation of Electric Power Systems, 2015, 39(20): 19-25, 108.
[9] 董福杰. 基于寻优算法的双馈风电机组变流器控制参数辨识[D]. 沈阳: 沈阳工业大学, 2024.
Dong Fujie. Identification of control parameters for doubly fed wind turbine inverter based on optimi- zation algorithm[D]. Shenyang: Shenyang University of Technology, 2024.
[10] Li Weiye, Wu Zhenyu. A methodology for dam parameter identification combining machine learning, multi-objective optimization and multiple decision criteria[J]. Applied Soft Computing, 2022, 128: 109476.
[11] 徐恒山, 曾宪金, 张旭军, 等. 基于RT-LAB的DFIG网侧变流器控制参数多目标分步辨识方法[J]. 电网技术, 2025, 49(2): 771-780.
Xu Hengshan, Zeng Xianjin, Zhang Xujun, et al. Multi-objective step-by-step identification method of control parameters for DFIG grid side converter based on RT-LAB[J]. Power System Technology, 2025, 49(2): 771-780.
[12] 张剑, 何怡刚. 基于轨迹灵敏度分析的永磁直驱风电场等值模型参数辨识[J]. 电工技术学报, 2020, 35(15): 3303-3313.
Zhang Jian, He Yigang. Parameters identification of equivalent model of permanent magnet synchronous generator wind farm based on analysis of trajectory sensitivity[J]. Transactions of China Electrotechnical Society, 2020, 35(15): 3303-3313.
[13] 贾科, 刘芸, 毕天姝, 等. 构网型控制的新能源电源故障控制参数辨识方法[J/OL]. 中国电机工程学报, 1-10[2024-10-28]. http://kns.cnki.net/kcms/detail/ 11.2107.tm.20241028.1422.017.html.
Jia Ke, Liu Yun, Bi Tianshu, et al. Identification method of fault control parameters for grid-forming control of renewable energy[J/OL]. Proceedings of the CSEE, 1-10[2024-10-28]. http://kns.cnki.net/kcms/ detail/11.2107. tm.20241028.1422.017.html.
[14] 谢震, 杨曙昕, 代鹏程, 等. 构网型全功率风电机组网侧变流器耦合分析及抑制策略[J]. 电工技术学报, 2023, 38(14): 3745-3758, 3768.
Xie Zhen, Yang Shuxin, Dai Pengcheng, et al. Grid- side coupling analysis and suppression strategy of grid-forming full-power wind turbines[J]. Transa- ctions of China Electrotechnical Society, 2023, 38(14): 3745-3758, 3768.
[15] Banaiemoqadam A, Hooshyar A, Azzouz M A. A comprehensive dual current control scheme for inverter-based resources to enable correct operation of protective relays[J]. IEEE Transactions on Power Delivery, 2021, 36(5): 2715-2729.
[16] 金宇清, 鞠平, 刘伟航, 等. 基于量测信号扰动的DFIG变流器控制参数辨识方法[J]. 电力系统自动化, 2016, 40(8): 36-42.
Jin Yuqing, Ju Ping, Liu Weihang, et al. Parameter identification method for converter controller of DFIG based on measurement signal disturbance[J]. Automation of Electric Power Systems, 2016, 40(8): 36-42.
[17] Wang Huaizhi, Li Gangqiang, Wang Guibin, et al. Deep learning based ensemble approach for pro- babilistic wind power forecasting[J]. Applied Energy, 2017, 188: 56-70.
[18] 刘刚, 高成龙, 胡万君, 等. 基于鲸鱼优化算法超参数优化的径向基函数响应面模型的油浸式变压器绕组挡板结构优化[J]. 电工技术学报, 2024, 39(17): 5331-5343.
Liu Gang, Gao Chenglong, Hu Wanjun, et al. Optimization of winding block washer structure for oil immersed transformers based on radial basis function response surface model with whale opti- mization algorithm hyper-parameters optimization[J]. Transactions of China Electrotechnical Society, 2024, 39(17): 5331-5343.
[19] 刘志赢, 汪友华, 刘成成, 等. 基于多岛遗传算法与响应面法的横向磁通感应加热装置参数优化设计[J]. 电工技术学报, 2024, 39(10): 3180-3191.
Liu Zhiying, Wang Youhua, Liu Chengcheng, et al. Optimization design of parameters for transverse flux induction heating device based on multi-island genetic algorithm and response surface method[J]. Transactions of China Electrotechnical Society, 2024, 39(10): 3180-3191.
[20] 范兴明, 封浩, 张鑫. 最小二乘算法优化及其在锂离子电池参数辨识中的应用[J]. 电工技术学报, 2024, 39(5): 1577-1588.
Fan Xingming, Feng Hao, Zhang Xin. Optimization of least squares method and its application in parameter identification of lithium-ion battery model[J]. Transa- ctions of China Electrotechnical Society, 2024, 39(5): 1577-1588.
[21] 秦继朔, 贾科, 孔繁哲, 等. 基于寻优算法的永磁风机并网逆变器故障穿越控制参数分步辨识[J]. 中国电机工程学报, 2021, 41(增刊1): 59-69.
Qin Jishuo, Jia Ke, Kong Fanzhe, et al. Stepwise parameter identification of fault ride-through control parameters of PMSG grid-connected inverter based on optimization algorithm[J]. Proceedings of the CSEE, 2021, 41(S1): 59-69.
[22] Zou Hui, Hastie T. Addendum: regularization and variable selection via the elastic net[J]. Journal of the Royal Statistical Society Series B: Statistical Methodo- logy, 2005, 67(5): 768.
[23] Cheng Xueyang, Lee W J, Sahni M, et al. Dynamic equivalent model development to improve the operation efficiency of wind farm[J]. IEEE Transa- ctions on Industry Applications, 2016, 52(4): 2759- 2767.
[24] 马一鸣, 周理兵, 王晋, 等. 基于直流阶跃电压试验与NSGA Ⅱ算法的同步电机动态参数辨识方法[J]. 电工技术学报, 2019, 34(23): 4890-4900.
Ma Yiming, Zhou Libing, Wang Jin, et al. A method for synchronous machine dynamic parameters identi- fication based on DC step voltage test and NSGA Ⅱ algorithm[J]. Transactions of China Electrotechnical Society, 2019, 34(23): 4890-4900.
[25] 刘兴杰, 闫亮. 基于轨迹灵敏度的励磁系统参数可辨识性分析[J]. 电力系统自动化, 2019, 43(1): 209- 214, 227.
Liu Xingjie, Yan Liang. Parameter identifiability analysis of excitation system based on trajectory sensitivity[J]. Automation of Electric Power Systems, 2019, 43(1): 209-214, 227.
[26] 刘金琨, 沈晓蓉, 赵龙. 系统辨识理论及MATLAB仿真[M]. 北京: 电子工业出版社, 2013.
[27] 许饶琪, 彭晓涛, 秦世耀, 等. 基于M序列的双馈风机变流器参数辨识方法研究[J]. 电网技术, 2022, 46(2): 578-586.
Xu Raoqi, Peng Xiaotao, Qin Shiyao, et al. Parameter identification of doubly-fed induction generator converter based on M-sequence[J]. Power System Technology, 2022, 46(2): 578-586.
[28] 朱益华, 李卫星, 李成翔, 等. 基于频域通用建模的双馈风电机组参数的一体化辨识方法[J]. 电力系统自动化, 2024, 48(15): 92-101.
Zhu Yihua, Li Weixing, Li Chengxiang, et al. Integrated identification method for parameters of doubly-fed wind turbines based on general modeling in frequency domain[J]. Automation of Electric Power Systems, 2024, 48(15): 92-101.
Control Parameter Identification of Grid-Forming Doubly-Fed Induction Generator Wind Turbines Based on Disturbance Shielding Improved Alpha Algorithm
Abstract In China, power electronic equipment plays a key role in modern power grids thanks to its fast dynamic response ability. However, it lacks the unique stability characteristics of synchronous motors. Therefore, some scholars have proposed the concept of a virtual synchronous machine (VSG). Relying on this concept, the VSG-DFIG was developed. The converter plays a central role in the wind power generation system; its control parameters significantly impact the system's dynamic performance.
This paper proposes a parameter identification strategy for VSG-DFIG, based on disturbance shielding and multi-objective weighted summation. First, observations strongly correlated with the control parameters are identified through the elastic network, and these observations are then used as variables in the subsequent optimization objective function. Trajectory sensitivity analysis is used to distinguish the VSG-DFIG parameters, and the traditional primary-side short-circuit condition is compared with the disturbance shielding method. Finally, based on the disturbance shielding strategy, an improved α-coefficient evolutionary algorithm combined with a multi-objective weighted optimization model is used for parameter identification.
The following conclusions verify the effectiveness of the proposed method. (1) The sensitivity of the parameters of the multi-stage control in a primary-side short-circuit fault is coupled, making identification difficult. Shielding the disturbance at the first stage can significantly reduce the sensitivity of the controller parameters, considerably improving the accuracy of their identification. (2) Using an elastic network and a multi-objective weighting method to select the identification objective function improves the accuracy of identification. The convergence speed and accuracy of the improved AE algorithm are higher than the original AE algorithm. (3) Compared with the terminal voltage drop condition with the disturbance superposition condition, the proposed multi-objective weighted summation with the disturbance shielding strategy can effectively improve the identification accuracy and reliability of the control parameters of the VSG-DFIG.
keywords:Parameter identification, disturbance shielding, multi-objective weighted optimization, improved alpha evolution algorithm, trajectory sensitivity
中图分类号:TM614
DOI: 10.19595/j.cnki.1000-6753.tces.250931
收稿日期2025-06-03
改稿日期 2025-06-17
贾博为 男,2001年生,硕士研究生,研究方向为新能源并网系统建模与控制。
E-mail: 18849286248@163.com
张学广 男,1981年生,教授,博士生导师,研究方向为风力发电技术。
E-mail: zxghit@126.com(通信作者)
(编辑 陈 诚)